Research Article Effects of Damping Plate and Taut Line ...
11
Research Article Effects of Damping Plate and Taut Line System on Mooring Stability of Small Wave Energy Converter Zhen Liu, 1,2 Ying Cui, 3 Huanyu Zhao, 3 Hongda Shi, 1,2 and Beom-Soo Hyun 4 1 Shandong Provincial Key Laboratory of Ocean Engineering, Ocean University of China, Qingdao 266100, China 2 Qingdao Municipal Key Laboratory of Ocean Renewable Energy, Ocean University of China, Qingdao 266100, China 3 College of Engineering, Ocean University of China, Qingdao 266100, China 4 College of Ocean Science and Technology, Korea Maritime and Ocean University, Busan 404796, Republic of Korea Correspondence should be addressed to Zhen Liu; [email protected] Received 17 April 2015; Accepted 17 June 2015 Academic Editor: Ming Zhao Copyright © 2015 Zhen Liu et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Ocean wave energy can be used for electricity supply to ocean data acquisition buoys. A heaving buoy wave energy converter is designed and the damping plate and taut line system are used to provide the mooring stability for better operating conditions. e potential flow assumption is employed for wave generation and fluid structure interactions, which are processed by the commercial soſtware AQWA. Effects of damping plate diameter and taut line linking style with clump and seabed weights on reduction of displacements in 6 degrees of freedom are numerically studied under different operating wave conditions. Tensile forces on taut lines of optimized mooring system are tested to satisfy the national code for wire rope utilization. 1. Introduction e resource of fossil fuel on land has been reducing signifi- cantly and rapidly because of the huge demand and consump- tion of energy in the economy development. Ocean contains abundant energies such as wave, tidal stream, and thermal energy. For instance, wave energy resource for technical exploitation is up to 0.1 to 1 TW⋅h/year, which is of the same order of magnitude of world electricity consumption. Wave energy has become one of the most popular research areas, which is also quite different from traditional ocean engineer- ing [1, 2]. e fluid structure interaction is more violent for most of wave energy converters during their operating stage. Besides the power take-off mechanism, the mooring system and stability analysis of floating oscillating body wave energy converter have attracted many scholars’ interests [3, 4]. Originally, the mooring system of floating marine struc- tures was designed and investigated for drilling platforms and offshore wind turbines. A new hybrid mooring system was designed to reduce the tension on the lines and is widely used in various water depths [5]. It is indicated that the hybrid mooring system with weights and buoys shows better performance than the taut mooring system and the hybrid mooring system only with weights. e catenary mooring system design for tri-floater floating offshore wind turbines was designed by Benassai et al. [6]. Both ultimate and accidental limit states are examined by wave loads under 50 and 1 year return period conditions. It is found that platform admissible offset and line pattern significantly influence the mooring system weight. Obtained results show that 9 and 12 line configurations are the necessary choice and the mooring line weight is independent of water depth between 100 and 200 m, or it will increase if the water depth is out of this range. e catenary and vertical tensioned mooring lines are then numerically studied for the mooring control of tri- floater support structures for wind turbines [7]. Numerical investigations of dynamic response of a spar-type hollow cylindrical floating substructure moored by three catenary cables to irregular wave excitation were conducted [8]. e wave-floating substructure and wave-mooring cable interactions are simulated by coupling BEM and FEM in the staggered iterative manner under potential wave flow conditions. e modeling of mooring systems and structural behavior of floating vertical axis wind turbines and various Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2015, Article ID 814095, 10 pages http://dx.doi.org/10.1155/2015/814095
Transcript of Research Article Effects of Damping Plate and Taut Line ...

Research ArticleEffects of Damping Plate and Taut Line System onMooring Stability of Small Wave Energy Converter
Zhen Liu12 Ying Cui3 Huanyu Zhao3 Hongda Shi12 and Beom-Soo Hyun4
1Shandong Provincial Key Laboratory of Ocean Engineering Ocean University of China Qingdao 266100 China2Qingdao Municipal Key Laboratory of Ocean Renewable Energy Ocean University of China Qingdao 266100 China3College of Engineering Ocean University of China Qingdao 266100 China4College of Ocean Science and Technology Korea Maritime and Ocean University Busan 404796 Republic of Korea
Correspondence should be addressed to Zhen Liu liuzhenouceducn
Received 17 April 2015 Accepted 17 June 2015
Academic Editor Ming Zhao
Copyright copy 2015 Zhen Liu et alThis is an open access article distributed under the Creative CommonsAttribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Ocean wave energy can be used for electricity supply to ocean data acquisition buoys A heaving buoy wave energy converter isdesigned and the damping plate and taut line system are used to provide the mooring stability for better operating conditions Thepotential flow assumption is employed for wave generation and fluid structure interactions which are processed by the commercialsoftware AQWA Effects of damping plate diameter and taut line linking style with clump and seabed weights on reduction ofdisplacements in 6 degrees of freedom are numerically studied under different operating wave conditions Tensile forces on tautlines of optimized mooring system are tested to satisfy the national code for wire rope utilization
1 Introduction
The resource of fossil fuel on land has been reducing signifi-cantly and rapidly because of the huge demand and consump-tion of energy in the economy development Ocean containsabundant energies such as wave tidal stream and thermalenergy For instance wave energy resource for technicalexploitation is up to 01 to 1 TWsdothyear which is of the sameorder of magnitude of world electricity consumption Waveenergy has become one of the most popular research areaswhich is also quite different from traditional ocean engineer-ing [1 2] The fluid structure interaction is more violent formost of wave energy converters during their operating stageBesides the power take-off mechanism the mooring systemand stability analysis of floating oscillating body wave energyconverter have attracted many scholarsrsquo interests [3 4]
Originally the mooring system of floating marine struc-tures was designed and investigated for drilling platformsand offshore wind turbines A new hybrid mooring systemwas designed to reduce the tension on the lines and is widelyused in various water depths [5] It is indicated that thehybrid mooring system with weights and buoys shows better
performance than the taut mooring system and the hybridmooring system only with weights The catenary mooringsystem design for tri-floater floating offshore wind turbineswas designed by Benassai et al [6] Both ultimate andaccidental limit states are examined by wave loads under 50and 1 year return period conditions It is found that platformadmissible offset and line pattern significantly influence themooring system weight Obtained results show that 9 and 12line configurations are the necessary choice and the mooringline weight is independent of water depth between 100 and200m or it will increase if the water depth is out of this range
The catenary and vertical tensioned mooring lines arethen numerically studied for the mooring control of tri-floater support structures for wind turbines [7] Numericalinvestigations of dynamic response of a spar-type hollowcylindrical floating substructure moored by three catenarycables to irregular wave excitation were conducted [8]The wave-floating substructure and wave-mooring cableinteractions are simulated by coupling BEM and FEM inthe staggered iterative manner under potential wave flowconditions The modeling of mooring systems and structuralbehavior of floating vertical axis wind turbines and various
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 814095 10 pageshttpdxdoiorg1011552015814095
2 Mathematical Problems in Engineering
mathematical models with their suitability for developingmodel of coupled dynamics are summarized [9]
For the studies of mooring system for wave energy con-verters the field sea trials and physical model tests can pro-vide valuable information and validation for the numericalmodels An approach is proposed to calculate and predict thefatigue damage of the mooring system [10] Correspondingloads are measured in the large-scale field trials at the SouthWest Mooring Test Facility The mooring system which war-rants the stability-keeping of marine energy devices is subjectto highly cyclic nonlinear load conditionsmainly induced bythe incident waves Experiments were conducted on a 1 20scale model of the floating wave energy device moored bysix mooring lines to study the dynamics of the device underregular waves for various scopes [11] which was intendedto provide a better understanding of the hydrodynamicbehavior of a floating multiresonant oscillating column waveenergy device which combines the concept of a floatingbreakwater and a wave energy device Several wave tank testresults for a scale model of the buoy and mooring used atthe South West Mooring Test Facility were presented for thevalidation of a time-domain mooring modeling tool to checkthe buoy draft and the tension characteristics of the mooringsystem [12]
Within the development of the computation capabilityand numerical models the mathematical models for analysisof mooring system and stability characteristics become pop-ular and useful in the wave energy field A method to includethe influence of mooring cables in the frequency domainanalysis of wave energy converterswas proposed to be appliedto a generic wave energy device based on a truncated verticalcylinder of 100 ton displacement [13] An array of identicalfloating point absorbers located at the grid points of anequilateral triangular grid was considered by Fitzgerald andBergdahl [14]Thewhole system buoys moorings and powertake-off systems are assumed to be linear and a frequencydomain analysis was employed An approach for extrapo-lating 50-year extreme load responses was used for extremewind load estimations which was transferred for wave loadsacting on floating wave energy converters extreme tensionloadswith a return period of 50 years and impact given failureare assessed for the hawser and at the different mooring lines[15]
Most previous published researches focused on themoor-ing systemof large ocean engineering structures such as oilrigplatforms wind turbines and high installed capacity waveenergy converters The present paper deals with the smallheaving body wave energy converter (WEC) within 1 kWlevel electricity generation which is supposed to be used forlong-term energy supply for offshore ocean environmentalmonitoring devices such as the ocean buoys The designof WEC mainly includes the energy converting and moor-ing systems The station-keeping capability and low costsdemands are considered together Numerical model based onthe commercial softwareAnsys-AQWA is applied for the fluidstructure interaction analysis Effects of the damping plateand taut line system on stability are studied and engineeringapplication of the optimized design is scheduled as the seatrial proofs
2 Design of 1 kW Heaving Body WaveEnergy Converter
Long-term independent electricity supply of offshore oceandata acquisition buoys has proposed the demands for in situpower take-off which can be satisfied by wave energy con-verters within suitable electricity cable connection approachesSince the electricity request is not high 1 kW installed capac-ity is enough for everyday and long-term supply On the otherhand the wave energy converter is considered to be operatedaround nearshore sea area in China where the flux density ofwave energy is significantly smaller than that in the AtlanticThis ideal was initially supported by the Special Fund Projectfor Ocean Renewable Energy which was granted by StateOceanic Administration of Chinese center government
Following the above conditions and demands the designprinciple of the small wave energy converter for ocean buoyselectricity supply located in Qingdao China should be thefollowing
(i) 1 kW installed capacity with high reliability energyconvertingmechanism (project evaluating indicator)
(ii) Away from coastline ⩽50m water depth ⩽20moperating wave height 05m extreme wave height14m and wave period 30sim70 s (derived from localmeasured data)
(iii) High stability of mooring system heave less than01m surge and sway less than 02m and pitch rolland yaw less than 10∘ under operatingwave conditions(project admissible values)
(iv) Low costs on manufacturing transportation anddeployment
(v) Easy access to repairing and maintenance
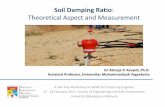
The 1 kW heaving body wave energy converter is illustratedin Figure 1 The buoy could heave along the guide rodwhich restricts the buoyrsquos oscillation in one degree of freedom(DOF) The guide rod is long enough to adapt the tidal dif-ference and is connected by two-sided rack and gear systemwithin the buoy Especially for the small installed capacitythe rack-gear system is regarded to be more effective andefficient than other energy converting types such as thelinear generator and hydraulic pressure systemThe gear alsolinks with the electricity generator using the bearing andspeed-growth devices All the above units are fixed in thewatertight compartment arranged into the buoy A hollowdamping plate is installed underwater to provide the stabilityand buoyancy of equipment except for the buoy (mooringsystem) Four piles are used to connect the seabed weightsand the damping plate employing taut lines Clump weight isat the end of the guide rod to lower the gravity center
3 Numerical Model
31 Governing Equations Linear wave is considered basedon the assumption of homogeneous incompressible inviscidfluid and irrotational flow In addition the wave amplitude isassumed to be small compared to the wave length and waterdepth hence the linear free surface condition is used In the
Mathematical Problems in Engineering 3
Heaving buoy
Guide rod
Rack and gear
Damping plate
Crane piles
Clump weight
Taut line
Seabed weight
Figure 1 Schematic of 1 kW heaving body wave energy converter
Cartesian coordinate system the velocity potential velocityand free surface elevation can be expressed as
119902 (119909 119910 119911 119905) = Re 119906 (119909 119910 119911) 119890minus119894120596119905
120577 (119909 119910 119911 119905) = Re 120578 (119909 119910) 119890minus119894120596119905
Φ (119909 119910 119911 119905) = 120601 (119909 119910 119911) 119890
minus119894120596119905
(1)
where 119906(119909 119910 119911) = nabla120593(119909 119910 119911) 119902 is the fluid particle velocity120596 is the wave frequency (in rads) 120577 is the surface elevationand Φ(119909 119910 119911 119905) is the velocity potential The origin of thereference is at the still water surface The orientation of thevertical axis 119911 is upward
By accounting for wave radiation and diffraction thefluid structure interaction behavior is described by the set ofequations
Laplace equations nabla2Φ(119909 119910 119911 119905) = 0 (2)
applicable everywhere in the fluid domain Consider
Linear free surface boundary 1205972Φ
120597119905
2 +119892
120597Φ
120597119911
= 0
Body surface conditions 120597Φ120597119899
= 119880
119895119899
119895
Seabed surface condition at depth of 119867 120597Φ
120597119899
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816119911=minus119867
= 0
(3)
Radiation conditions are as follows Wave propagation couldbe found far from the body surface 119880
119895is the generalized
velocity of body surface 119899119895is the generalized normal vector
of the specific point on the body surface and subscript 119895 isthe 119895th mode of motion of the above components
The velocity potential could be expressed by using super-position principle as follows
Φ(119909 119910 119911 119905) = Φ
119868
(119909 119910 119911 119905) +Φ
119863
(119909 119910 119911 119905)
+Φ
119877
(119909 119910 119911 119905)
(4)
where Φ
119868
(119909 119910 119911 119905) is the incident wave potential Φ119877(119909 119910119911 119905) is the radiation potential and Φ
119863
(119909 119910 119911 119905) is the dif-fraction potential respectively In addition Φ119863 + Φ
119877
= Φ
119875which are called the disturbing potential together
Assuming that the body motion is small around the stillwater surface the velocity potential Φ(119909 119910 119911 119905) could beexpressed as
Φ(119909 119910 119911 119905) = Re 120601 (119909 119910 119911) 119890minus119894120596119905 (5)
where 120601(119909 119910 119911) can be called the isolated space dependentpotentialThe solution could be regarded as a steady problemwhich is expressed as
120601 (119909 119910 119911) = 120601
119868
(119909 119910 119911) + 120601
119863
(119909 119910 119911) + 120601
119877
(119909 119910 119911) (6)
where 120601
119868 is the incident wave velocity potential at a singledirection within a single frequency It can be resolved by thefollowing equation
120601
119868
= minus
119860119892
120596
cosh 119896 (119911 + ℎ)
cosh 119896ℎexp [119894119896 (119909 cos120573+119910 cos120573)] (7)
where 119860 is the wave amplitude 119896 is the wave number ℎ isthe water depth 119892 is the gravity acceleration 120582 is the wavelength and 120573 is the included angle between the incident wavedirection and the 119909 axis 119896 can be defined as 2120587120582 which iscalculated by the free surface and water depth conditions
In order to derive the motion of the system motion in sixdegrees of freedom the motion equation of the floating bodyin the time domain should be considered and expressed asfollows [16]
(119872+119898)
119883 (119905) +int
119905
minusinfin
119870 (119905 minus 120591)
119883 (119905) 119889120591 +119862119883 (119905)
= 119865
119908(119905) + 119865wind +119865119888 +119865sn (119905) + 119865119898 (119905)
(8)
where 119883(119905) represents the transit translation displacementin three directions (119909 119910 and 119911 axes) 119872 and 119898 are thegeneralized mass matrix and added mass matrix 119870(119905 minus 120591) isthe delay function of the system and 119862 is the hydrostaticrestoring force coefficient matrix 119865
119908(119905) 119865wind 119865119888 119865sn(119905) and
119865
119898(119905) are the first-order wave force wind force current force
second-order wave force and tension loads on taut lines inthe corresponding directions respectively In this study windand current forces are ignored regarding themeasured data oflocal sea areas so only the wave forces are considered
4 Mathematical Problems in Engineering
First-order wave force can be resolved from the convo-lution relationship between the wave force on the frequencyand time domains proposed by Cummins The equation isexpressed as
119865
119908119894(119905) = int
119905
0ℎ
1119894
(119905 minus 120591) 119889120591
ℎ
1119894
(119905) =
1120587
int
infin
0119867
1119894
(120596) 119890
119894120596119905
119889120596
(9)
where1198671119894
is the responding function of the first-order regularwave force of the unit amplitude
The calculation of second-order wave force could beconducted using the method proposed by Newman Basedon the indirect time domain method after the Fouriertransform the delay function can be expressed as
119870
119894119895(119905) =
2120587
int
infin
0120582
119894119895(120596) cos (120596119905) 119889120596 (10)
where 120582119894119895is the damping matrix of the floating body in the
frequency domainAdded mass in the time domain can be expressed as
119898
119894119895= 119906
119894119895(1205960) +
11205960
int
infin
0119870
119894119895(119905) sin (1205960119905) 119889119905 (11)
where 119906 is the added mass matrix of the floating body in thefrequency domain and 120596
0is random number
32 Numerical Solutions Ansys-AQWA is the commercialcomputational fluid dynamics software based on the govern-ing equations described in Section 31 All the calculations ofthe above equations are coupled in two modules for the finalanalysis AQWA-LINE deals with the applications of diffrac-tion and radiation theories for fluid structure interaction [17]The modules can also calculate the first- and second-orderwave forces on the floating structures and further responseIn addition AQWA-NAUT conducts the calculations forhydrodynamic parameters in the time domain under thespecific wave conditions [18] The module will call the addedmass radiation damping and diffraction force from AQWA-LINE during the computations The motion response of thefloating structures will be outputted after integrating effectsof hinges and anchor lines among bodies AQWA-NAUT alsorecalculates the Froude-Krylov force during every time stepconsidering influences of wet surface area variation on thenonlinear dynamics
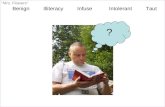
All the structures and grids will be generated in AnsysMechanical APDL software and then transferred as theAQWA executive files In the present paper the scheme in thenumerical model is slightly simplified where the crane pilesare cancelled and the buoy is fixed on the guide rod withoutany relative motions Some corresponding parameters areshown in Figure 2(a) the water depth is fixed as 10mand the buoy diameter and height are 18m and 095mrespectively The taut lines linking the damping plate andthe seabed weights are called SWL and those linking theclump and seabed weights are defined as CWLThe diameter
of the damping plate is 119863 and the distance between twoseabed weights is 119878 The total weight of the floating facility isaround 8 ton For different shape parameters in the followingcalculating cases the height of clumpweight ℎ
119908 the height of
the guide rod between the damping plate and clump weightℎ
119866 and height of damping plate ℎ
119901 are adjusted which will
keep the system center of gravity 50mm below the top ofclump weight The center of buoyancy is kept at the center ofthe damping plate using the same methodThe net buoyancyis around 45sim98 kN It should be noted that two CWLs andtwin seabed weights will merge to be one line and one weightwhen 119878 = 0 The diameter of wire rope used as the taut line is14mm and its elasticity modulus is 206GPa Following theChinese code of wire ropes the allowed maximum tensileforce is 138 kN [19]
The grid structures in the numerical model are shownin Figure 2(b) the node number is up to 3074 Shell 181element is utilized to generate all the nonline structuresEach element has four nodes with 6 DOF which also candegenerate to the triangular elements Pipe 16 element whichhas two nodes is used for taut lines model setup The originof coordinates locates at the intersection of the center axisof the wave energy converter and still water surface Theorientations of 119909 119910 and 119911 axes follow the directions shownin Figure 2(b) In the software the wire rope extensions willbe conducted automatically at the start of analysis becauseof the equilibrium of resultant force at rest Based on themodulus of elasticity and several trials following the softwaremanuals wire ropes are all shortened to 95 of the requiredlengths considering taut effects as line pretensions which willmake system components get to the preset positions in thepreliminary design The incident wave period 119879 varies from30 s to 70 s 119867 = 05m is utilized as the operating waveheight 119867 = 14m is the extreme wave condition The timestep used in all the calculations is 005 s
33 Experimental Validation In order to validate the capabil-ity of the present numerical model on floating body motionunder wave excitation experimental data of the oscillatingmotion of the buoy are used for the validation The buoy isrestricted to move in one degree of freedom along the guiderod without any damping plates which is fixed to the tankbottom All the physical model tests were carried out in thewave tank of Shandong Provincial Key Laboratory of OceanEngineering Ocean University of China [20] Regular waveswith different conditions are employed in the experimentsAlthough the experimental contents are somehow differentfrom the WEC system in the present paper the validationof buoyrsquos 1D motions still could provide solid evidenceexplicitly on the capability of the numerical model on thehydrodynamic characteristics of floating bodies driven bywaves
Comparisons between the numerical and experimentalresults of the buoy heaving amplitudes are shown in Figure 3Numerical model slightly overpredicts all the results becauseof the ideal conditions and ignoring all nonlinear effectsMean error of the numerical predictions is 89 Goodagreements show that the numerical model could be applied
Mathematical Problems in Engineering 5
D
6000
300
2000
1000
800
3500
10000
SWL
CWL
S
Unit mm
(a) Parameters of WEC
Z
X
Y
Z
(b) Structure and grids in the numerical model (snapshot fromthe software)
Figure 2 Numerical model setup of WEC with mooring system
in the further investigation for wave-structure interactionanalysis It also should be pointed out that the mooringline dynamic mechanics are not verified here which can bereferred to the software manual and calculation examples[16ndash18]
4 Results and Discussion
For the mooring system of heaving type point absorberwave energy converter it is very important to keep thewhole facility in stationary state which will provide a betteroperating condition for the buoy to oscillate along the guiderod Hence the displacements in the six degrees of freedomwill be treated as the evaluating indexes in the present paperThe damping plate and the taut line system are designed andtested to reduce the movements in 6 DOF Time historiesof the mooring system displacements and tensile forces oftaut lines are demonstrated first Effects of damping platediameter taut line number and mooring types are thenstudied Based on the above investigation results tensionloads under the extreme wave conditions are calculated toverify the safety of wire ropes as taut lines
41 TimeHistoryDataAnalysis A typical case of themooringsystem is used for time domain results demonstration Theincident waves come from left side The diameter of damp
15 175 2 225 250
005
01
015
02
AQWA (H= 010m)EXP (H= 010m)
AQWA (H= 015m)EXP (H= 015m)
Buoy
mot
ion
ampl
itude
(m)
Period T (s)
Figure 3 Comparison between experimental and numerical heav-ing amplitudes of the buoy
plate is119863 = 50mTwo SWLs and twoCWLs are linked to thetwin seabed weights and the ratio 119878119863 = 10 The incident
6 Mathematical Problems in Engineering
Tran
slatio
n di
spla
cem
ent (
m)
tT
10 11 12 13 14 15 16minus006
minus004
minus002
0
002
004
006
Surge XSway Y
Heave Z
(a) Translation displacement
tT
10 11 12 13 14 15 16
Rota
tion
disp
lace
men
t (de
g)
minus1
minus05
0
05
1
PitchRollYaw
(b) Rotation displacement
tT
10 11 12 13 14 158
10
12
14
16
18
20
Tens
ion
(kN
)
CWL LCWL R
SWL LSWL R
(c) Tension forces on various taut lines
Figure 4 Time histories of mooring system motions and forces (119867 = 05m 119879 = 40 s119863 = 50m and 119878 = 50m 2 CWLs 2 SWLs)
wave height and period are 119867 = 05m and 119879 = 40 srespectively Time histories of translation and rotation dis-placements of the system center of gravity and tensile forceson taut lines are displayed in Figure 4 The data are derivedfrom the timing when initial incident wave effects disappear
It can be seen in Figure 4(a) that the translating motionvaries in the sinusoidal pattern under regular waves Theamplitudes reduce in order of surge heave and sway It canbe seen that the amplitudes of swaying motions are quitesmall and less than 20 times 10minus3m because of the wave incidentdirection Heaving and surging motions under incidentwave forces are dominated in the translation movementTheir peak-to-valley values are significantly smaller than thecriteria values For the rotation displacement in Figure 4(b)
rotations around three axes demonstrate the quasi-sinusoidaland resilient pattern All the amplitudes are less than 1 degreeThe rotating values in other calculated cases are also verysmall which indicates that rotation displacement does nothave to be treated as the control elements in the furtheranalysis for the mooring stability
The variations of tensions on four taut lines are illustratedin Figure 4(c) The positions of two pairs of taut lines in Fig-ure 2(a) are defined following the incident wave directionsThe patterns of four curves are all sinusoidal under regularwave conditions Phase differences of curves are decided bythe mooring system movements in 6 DOF Furthermoretension forces on two CWLs are evidently larger than that ofSWLs and should be used as the checking lines
Mathematical Problems in Engineering 7
3 4 5 6 70
05
1
15
D = 3mD= 4mD= 5m
Am
plitu
de o
f sur
geX
(m)
Period T (s)
(a) Surge119883
3 4 5 6 70
05
1
15
Am
plitu
de o
f hea
ve Z
(m)
D= 3mD= 4mD= 5m
Period T (s)
(b) Heave 119885
Figure 5 Effects of damping plate diameters on mooring system stability
42 Effects of Damping Plate Diameters Damping plate isused to compete against the motion caused by the incidentwaves in order to give the appropriate stability of themooringsystemThe diameter119863 varies as 30m 40m and 50m andthe height is fixed as 03m Only one CWL links the clumpweight and the single seabed weight Operating wave height119867 = 05m is used to deal with all five periods
Effects of damping plate diameters on mooring stabilityare shown in Figure 5 Surge motions are represented bythe maximum of surge offset values Maximums of troughto crest height values in every period express correspondingheave motions Data processing in the latter context as wellas Figures 6 and 7 also follows the same principle as aboveSway motions and rotation displacements are observed tobe very small under all calculated conditions and are notillustrated here No obvious regularities of diameter effectshave been found in the figures In Figure 5(a) the surgeamplitudes are mostly violent because the single verticalCWL is hard to restrain the horizontal motions On thecontrary in Figure 5(b) the 5m damping plate cooperatingwith the single CWL shows best performance to reduce themotions in the vertical direction Therefore 119863 = 5m ischosen to be the optimized diameter of the damping plateSince the surge amplitudes under the condition 119863 = 50mexceed the presupposed criterion diagonal taut lines shouldbe installed to prevent large horizontal movements
43 Effects of Taut Line System Considering the perfor-mance of single CWL on the mooring system stability twoCWLs are proposed with twin seabed weights The openinglevel of CWLs is represented by ratio 119878119863 varying from
0 to 10 Figure 6 illustrates effects of 119878119863 ratios on surgeand heave motions In Figure 6(a) it can be seen that thehorizontal moving amplitudes become smaller as 119878119863 ratioincreases The reducing range also decreases as 119878119863 becomesgreater Two peaks could be observed at 119879 = 40 s and 119879 =
60 s The surge amplitude is up to 065 at 119879 = 40 s when119878119863 ratio is zero and it satisfies the criterion when 119878119863
is larger than 04 The ratio 119878119863 = 10 shows the bestperformance to add the horizontal stability over the waveperiod range
In Figure 6(b) the heave motions do not show any obvi-ous distributing regularity according to 119878119863 ratio variationIt can be seen that most heaving values under small 119878119863ratios are less than 01m which fits the proposed mooringstability criterion in this paper As 119878119863 increases especially119878119863 = 10 most values over the period domain approachor exceed 01m which affects the surge motion oppositely Itis because larger 119878119863 ratios with greater opening angles willreduce the vertical tension under the same confined stress ofwire ropes
In order to deal with the paradoxical effects of 119878119863 =
10 on surge and heave motions two SWLs are added toreduce the vertical motions obtained with only CWLs InFigure 6(a) the coupled taut lines indeed show best per-formance on surge inhibitions and the amplitudes over theperiod domain decrease to less than 0025m On the otherhand effects on the heaving reduction are also evident andthe indicating values are all less than 005m Instead of settingadditional vertical CWL and weights the present designcould utilize two seabed weights at maximum extent tocontrol the costs
8 Mathematical Problems in Engineering
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
08
07
06
05
04
03
02
01
0
Period T (s)
(a) Surge119883
3 4 5 6 7
Am
plitu
de o
f hea
ve Z
(m)
04
03
02
01
0
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
Period T (s)
(b) Heave 119885
Figure 6 Effects of 119878119863 ratio on mooring system stability
44 Effects of Incident Wave Directions Since the layout oftaut lines is designed to be parallel to the incident wavedirection it is necessary to study the operating performanceof the mooring system under oblique waves Two angles areemployed as 45∘ and 90∘ in Figure 7(a) which are definedas included angles between incident wave directions and thelayout line of CWLs and SWLs119867 = 05m is still employed asthe operating wave height Figures 7(b) to 7(c) display effectsof incident wave directions on mooring system movementsin horizontal and vertical directions
In Figure 7(b) sway amplitudes become significantlygreater as expected when the incident angle increases Mostcalculated results under oblique waves exceed 02m for surgemotion A peak also can be found at 119879 = 50 s for both45∘ and 90∘ The maximum value is 088 which is over 4times higher than the criterion value For surge motions inFigure 7(c) the amplitudes under variouswave conditions areall less than 005m which will not affect the buoy operationobviously under oblique waves Although heave motions arenot increased as sharply as sways in Figure 7(d) their effectson the operating performance of oscillating buoys WEC aremore sensitiveTherefore it can be seen that current design ofmooring system cannot compete with oblique waves as wellas waves from the forward direction If at least two meandirections are employed in the design it can be imaginedthat cross arrangement of two sets of CWLs and SWLs willprovide a good performance to confront waves from variousdirections
45 Tension Analysis Tensile forces on the taut lines arecalculated under extreme wave conditions (119867 = 14m) withthree incident wave directions The mooring system is asfollows 2 SWLs and 2 CWLs 119878119863 = 10 The maximumvalues under each condition are extracted from time historiesof tension forces on all taut lines which occurs mostly onthe left CWL in Figure 2 The above values under variousincident directions are illustrated in Figure 8 It can be seenthat maximum tensions occur at 119879 = 40 s for all waveconditions and they decrease sharply as the wave periodincreases Although maximum tensions under all extremewave conditions do not exceed the allowed value of 138 kNthe tensile forces have approached this limit at 119879 = 40 swhich should be noted in the further design formore securityspace
5 Conclusions
A small oscillating wave energy converter has been designedfor electricity supply of nearshore ocean buoys The mooringsystem utilizes wire ropes as taut lines to connect thedamping plate and clump weight with seabed weights whichare investigated numerically to provide stationary state forheaving buoy operation Ansys-AQWAwas used to deal withthe potential flow waves and fluid structure interactions inthe time domain
It has been found that the damping plate could pro-vide a good station-keeping for the energy converting
Mathematical Problems in Engineering 9
CWL CWL
Y
X
O
0∘
45∘
90∘
(a) Incident angles of oblique waves
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(b) Surge119883
3 4 5 6 7
Am
plitu
de o
f sw
ay Y
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(c) Sway
3 4 5 6 7
1
08
06
04
02
0
Am
plitu
de o
f hea
ve Z
(m)
0∘
45∘
90∘
Period T (s)
(d) Heave 119885
Figure 7 Effects of incident wave direction on mooring system stability
compartment Under the current design parameters thediameter 119863 = 50m of the damping plate with single CWLshows best restraining results on the heaving motion of themooring facilities which also needs more support to controlthe surge Twin CWLs are then investigated and the ratio119878119863 = 10 can significantly reduce the surge motion andtwo added SWLs could help to reduce both surge and heaveamplitudes Oblique wave testing results suggest adding
the cross arrangement of CWLs and SWLs to deal with moreincident wave directions Calculated tensile forces on the tautlines demonstrate that the present design satisfies the allowedtension criterion
All the above results show that the mooring system uti-lized and optimized here is feasible and reliable In the futuremore detailed design is to be carried out for the prototypemachine manufacture Through rough calculations the costs
10 Mathematical Problems in Engineering
3 4 5 6 70
30
60
90
120
150
Tens
ion
(kN
)
0∘
45∘
90∘
Period T (s)
Figure 8 Tension forces on taut lines under extreme wave condi-tions
of the present mooring system are about 40 lower thanthose of the traditional 4 or 5 points mooring system Seatrials will be conducted in order to test the station-keepingcapability of the present mooring system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to the financial support provided byNational Natural Science Foundation of China (41376100)National High Technology Research and Development Pro-gram of China (863 Project 2012AA052601) Special Fundfor Ocean Renewable Energy of SOA (QDME2011GD02)Shandong Natural Science Funds for Distinguished YoungScholar (JQ201314) Qingdao Municipal Science amp Technol-ogy Program (13-4-1-38-hy) and the Program of IntroducingTalents of Discipline to Universities (111 Project B14028)
References
[1] E B Agamloh A KWallace and A von Jouanne ldquoApplicationof fluidndashstructure interaction simulation of an ocean waveenergy extraction devicerdquo Renewable Energy vol 33 no 4 pp748ndash757 2008
[2] Y-H Yu and Y Li ldquoReynolds-Averaged Navier-Stokes simula-tion of the heave performance of a two-body floating-pointabsorber wave energy systemrdquo Computers amp Fluids vol 73 pp104ndash114 2013
[3] A Umar and T K Datta ldquoNonlinear response of a mooredbuoyrdquo Ocean Engineering vol 30 no 13 pp 1625ndash1646 2003
[4] R Guanche V Gomez C Vidal and I Eguinoa ldquoNumericalanalysis and performance optimization of a submerged waveenergy point absorberrdquoOcean Engineering vol 59 pp 214ndash2302013
[5] Z-M Yuan A Incecik and C Y Ji ldquoNumerical study on ahybrid mooring system with clump weights and buoysrdquo OceanEngineering vol 88 pp 1ndash11 2014
[6] G Benassai A Campanile V Piscopo and A ScamardellaldquoMooring control of semi-submersible structures for windturbinesrdquo Procedia Engineering vol 70 pp 132ndash141 2014
[7] V Harnois S D Weller L Johanning et al ldquoNumerical modelvalidation for mooring systems method and application forwave energy convertersrdquoRenewable Energy vol 75 pp 869ndash8872015
[8] E E Bachynski Y L Young and R W Yeung ldquoAnalysis andoptimization of a tethered wave energy converter in irregularwavesrdquo Renewable Energy vol 48 pp 133ndash145 2012
[9] V Krivtsov and B Linfoot ldquoDisruption to benthic habitats bymoorings of wave energy installations a modelling case studyand implications for overall ecosystem functioningrdquo EcologicalModelling vol 245 pp 121ndash124 2012
[10] P C Vicente A F D O Falcao L M C Gato and P A PJustino ldquoDynamics of arrays of floating point-absorber waveenergy converters with inter-body and bottom slack-mooringconnectionsrdquoAppliedOcean Research vol 31 no 4 pp 267ndash2812009
[11] E Vijayakrishna Rapaka R Natarajan and S NeelamanildquoExperimental investigation on the dynamic response of amoored wave energy device under regular sea wavesrdquo OceanEngineering vol 31 no 5-6 pp 725ndash743 2004
[12] C Ji and Z Yuan ldquoExperimental study of a hybrid mooringsystemrdquo Journal of Marine Science and Technology vol 20 no2 pp 213ndash225 2015
[13] S Ambuhl M Sterndorff and J D Soslashrensen ldquoExtrapolationof extreme response for different mooring line systems of float-ing wave energy convertersrdquo International Journal of MarineEnergy vol 7 pp 1ndash19 2014
[14] J Fitzgerald and L Bergdahl ldquoIncluding moorings in theassessment of a generic offshore wave energy converter afrequency domain approachrdquo Marine Structures vol 21 no 1pp 23ndash46 2008
[15] P R Thies L Johanning V Harnois H C M Smith and DN Parish ldquoMooring line fatigue damage evaluation for floatingmarine energy converters field measurements and predictionrdquoRenewable Energy vol 63 pp 133ndash144 2014
[16] AnsysAQWATheoryManual Release 150 Ansys CanonsburgPa USA 2013
[17] Ansys AQWA-LINE Manual Release 145 Ansys CanonsburgPa USA 2012
[18] Ansys Inc AQWA-NAUT Manual Release 145 2012[19] Standardization Administration of Peoplersquos Republic of China
National Code of PRC Steel Wire Ropes for Important Pur-poses GB8918-2006 StandardizationAdministration of PeoplersquosRepublic of China 2006
[20] Q Na Study on hydrodynamic performance of oscillating buoyWEC considering power take-off system [MS thesis] OceanUniversity of China Qingdao China 2015 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
mathematical models with their suitability for developingmodel of coupled dynamics are summarized [9]
For the studies of mooring system for wave energy con-verters the field sea trials and physical model tests can pro-vide valuable information and validation for the numericalmodels An approach is proposed to calculate and predict thefatigue damage of the mooring system [10] Correspondingloads are measured in the large-scale field trials at the SouthWest Mooring Test Facility The mooring system which war-rants the stability-keeping of marine energy devices is subjectto highly cyclic nonlinear load conditionsmainly induced bythe incident waves Experiments were conducted on a 1 20scale model of the floating wave energy device moored bysix mooring lines to study the dynamics of the device underregular waves for various scopes [11] which was intendedto provide a better understanding of the hydrodynamicbehavior of a floating multiresonant oscillating column waveenergy device which combines the concept of a floatingbreakwater and a wave energy device Several wave tank testresults for a scale model of the buoy and mooring used atthe South West Mooring Test Facility were presented for thevalidation of a time-domain mooring modeling tool to checkthe buoy draft and the tension characteristics of the mooringsystem [12]
Within the development of the computation capabilityand numerical models the mathematical models for analysisof mooring system and stability characteristics become pop-ular and useful in the wave energy field A method to includethe influence of mooring cables in the frequency domainanalysis of wave energy converterswas proposed to be appliedto a generic wave energy device based on a truncated verticalcylinder of 100 ton displacement [13] An array of identicalfloating point absorbers located at the grid points of anequilateral triangular grid was considered by Fitzgerald andBergdahl [14]Thewhole system buoys moorings and powertake-off systems are assumed to be linear and a frequencydomain analysis was employed An approach for extrapo-lating 50-year extreme load responses was used for extremewind load estimations which was transferred for wave loadsacting on floating wave energy converters extreme tensionloadswith a return period of 50 years and impact given failureare assessed for the hawser and at the different mooring lines[15]
Most previous published researches focused on themoor-ing systemof large ocean engineering structures such as oilrigplatforms wind turbines and high installed capacity waveenergy converters The present paper deals with the smallheaving body wave energy converter (WEC) within 1 kWlevel electricity generation which is supposed to be used forlong-term energy supply for offshore ocean environmentalmonitoring devices such as the ocean buoys The designof WEC mainly includes the energy converting and moor-ing systems The station-keeping capability and low costsdemands are considered together Numerical model based onthe commercial softwareAnsys-AQWA is applied for the fluidstructure interaction analysis Effects of the damping plateand taut line system on stability are studied and engineeringapplication of the optimized design is scheduled as the seatrial proofs
2 Design of 1 kW Heaving Body WaveEnergy Converter
Long-term independent electricity supply of offshore oceandata acquisition buoys has proposed the demands for in situpower take-off which can be satisfied by wave energy con-verters within suitable electricity cable connection approachesSince the electricity request is not high 1 kW installed capac-ity is enough for everyday and long-term supply On the otherhand the wave energy converter is considered to be operatedaround nearshore sea area in China where the flux density ofwave energy is significantly smaller than that in the AtlanticThis ideal was initially supported by the Special Fund Projectfor Ocean Renewable Energy which was granted by StateOceanic Administration of Chinese center government
Following the above conditions and demands the designprinciple of the small wave energy converter for ocean buoyselectricity supply located in Qingdao China should be thefollowing
(i) 1 kW installed capacity with high reliability energyconvertingmechanism (project evaluating indicator)
(ii) Away from coastline ⩽50m water depth ⩽20moperating wave height 05m extreme wave height14m and wave period 30sim70 s (derived from localmeasured data)
(iii) High stability of mooring system heave less than01m surge and sway less than 02m and pitch rolland yaw less than 10∘ under operatingwave conditions(project admissible values)
(iv) Low costs on manufacturing transportation anddeployment
(v) Easy access to repairing and maintenance
The 1 kW heaving body wave energy converter is illustratedin Figure 1 The buoy could heave along the guide rodwhich restricts the buoyrsquos oscillation in one degree of freedom(DOF) The guide rod is long enough to adapt the tidal dif-ference and is connected by two-sided rack and gear systemwithin the buoy Especially for the small installed capacitythe rack-gear system is regarded to be more effective andefficient than other energy converting types such as thelinear generator and hydraulic pressure systemThe gear alsolinks with the electricity generator using the bearing andspeed-growth devices All the above units are fixed in thewatertight compartment arranged into the buoy A hollowdamping plate is installed underwater to provide the stabilityand buoyancy of equipment except for the buoy (mooringsystem) Four piles are used to connect the seabed weightsand the damping plate employing taut lines Clump weight isat the end of the guide rod to lower the gravity center
3 Numerical Model
31 Governing Equations Linear wave is considered basedon the assumption of homogeneous incompressible inviscidfluid and irrotational flow In addition the wave amplitude isassumed to be small compared to the wave length and waterdepth hence the linear free surface condition is used In the
Mathematical Problems in Engineering 3
Heaving buoy
Guide rod
Rack and gear
Damping plate
Crane piles
Clump weight
Taut line
Seabed weight
Figure 1 Schematic of 1 kW heaving body wave energy converter
Cartesian coordinate system the velocity potential velocityand free surface elevation can be expressed as
119902 (119909 119910 119911 119905) = Re 119906 (119909 119910 119911) 119890minus119894120596119905
120577 (119909 119910 119911 119905) = Re 120578 (119909 119910) 119890minus119894120596119905
Φ (119909 119910 119911 119905) = 120601 (119909 119910 119911) 119890
minus119894120596119905
(1)
where 119906(119909 119910 119911) = nabla120593(119909 119910 119911) 119902 is the fluid particle velocity120596 is the wave frequency (in rads) 120577 is the surface elevationand Φ(119909 119910 119911 119905) is the velocity potential The origin of thereference is at the still water surface The orientation of thevertical axis 119911 is upward
By accounting for wave radiation and diffraction thefluid structure interaction behavior is described by the set ofequations
Laplace equations nabla2Φ(119909 119910 119911 119905) = 0 (2)
applicable everywhere in the fluid domain Consider
Linear free surface boundary 1205972Φ
120597119905
2 +119892
120597Φ
120597119911
= 0
Body surface conditions 120597Φ120597119899
= 119880
119895119899
119895
Seabed surface condition at depth of 119867 120597Φ
120597119899
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816119911=minus119867
= 0
(3)
Radiation conditions are as follows Wave propagation couldbe found far from the body surface 119880
119895is the generalized
velocity of body surface 119899119895is the generalized normal vector
of the specific point on the body surface and subscript 119895 isthe 119895th mode of motion of the above components
The velocity potential could be expressed by using super-position principle as follows
Φ(119909 119910 119911 119905) = Φ
119868
(119909 119910 119911 119905) +Φ
119863
(119909 119910 119911 119905)
+Φ
119877
(119909 119910 119911 119905)
(4)
where Φ
119868
(119909 119910 119911 119905) is the incident wave potential Φ119877(119909 119910119911 119905) is the radiation potential and Φ
119863
(119909 119910 119911 119905) is the dif-fraction potential respectively In addition Φ119863 + Φ
119877
= Φ
119875which are called the disturbing potential together
Assuming that the body motion is small around the stillwater surface the velocity potential Φ(119909 119910 119911 119905) could beexpressed as
Φ(119909 119910 119911 119905) = Re 120601 (119909 119910 119911) 119890minus119894120596119905 (5)
where 120601(119909 119910 119911) can be called the isolated space dependentpotentialThe solution could be regarded as a steady problemwhich is expressed as
120601 (119909 119910 119911) = 120601
119868
(119909 119910 119911) + 120601
119863
(119909 119910 119911) + 120601
119877
(119909 119910 119911) (6)
where 120601
119868 is the incident wave velocity potential at a singledirection within a single frequency It can be resolved by thefollowing equation
120601
119868
= minus
119860119892
120596
cosh 119896 (119911 + ℎ)
cosh 119896ℎexp [119894119896 (119909 cos120573+119910 cos120573)] (7)
where 119860 is the wave amplitude 119896 is the wave number ℎ isthe water depth 119892 is the gravity acceleration 120582 is the wavelength and 120573 is the included angle between the incident wavedirection and the 119909 axis 119896 can be defined as 2120587120582 which iscalculated by the free surface and water depth conditions
In order to derive the motion of the system motion in sixdegrees of freedom the motion equation of the floating bodyin the time domain should be considered and expressed asfollows [16]
(119872+119898)
119883 (119905) +int
119905
minusinfin
119870 (119905 minus 120591)
119883 (119905) 119889120591 +119862119883 (119905)
= 119865
119908(119905) + 119865wind +119865119888 +119865sn (119905) + 119865119898 (119905)
(8)
where 119883(119905) represents the transit translation displacementin three directions (119909 119910 and 119911 axes) 119872 and 119898 are thegeneralized mass matrix and added mass matrix 119870(119905 minus 120591) isthe delay function of the system and 119862 is the hydrostaticrestoring force coefficient matrix 119865
119908(119905) 119865wind 119865119888 119865sn(119905) and
119865
119898(119905) are the first-order wave force wind force current force
second-order wave force and tension loads on taut lines inthe corresponding directions respectively In this study windand current forces are ignored regarding themeasured data oflocal sea areas so only the wave forces are considered
4 Mathematical Problems in Engineering
First-order wave force can be resolved from the convo-lution relationship between the wave force on the frequencyand time domains proposed by Cummins The equation isexpressed as
119865
119908119894(119905) = int
119905
0ℎ
1119894
(119905 minus 120591) 119889120591
ℎ
1119894
(119905) =
1120587
int
infin
0119867
1119894
(120596) 119890
119894120596119905
119889120596
(9)
where1198671119894
is the responding function of the first-order regularwave force of the unit amplitude
The calculation of second-order wave force could beconducted using the method proposed by Newman Basedon the indirect time domain method after the Fouriertransform the delay function can be expressed as
119870
119894119895(119905) =
2120587
int
infin
0120582
119894119895(120596) cos (120596119905) 119889120596 (10)
where 120582119894119895is the damping matrix of the floating body in the
frequency domainAdded mass in the time domain can be expressed as
119898
119894119895= 119906
119894119895(1205960) +
11205960
int
infin
0119870
119894119895(119905) sin (1205960119905) 119889119905 (11)
where 119906 is the added mass matrix of the floating body in thefrequency domain and 120596
0is random number
32 Numerical Solutions Ansys-AQWA is the commercialcomputational fluid dynamics software based on the govern-ing equations described in Section 31 All the calculations ofthe above equations are coupled in two modules for the finalanalysis AQWA-LINE deals with the applications of diffrac-tion and radiation theories for fluid structure interaction [17]The modules can also calculate the first- and second-orderwave forces on the floating structures and further responseIn addition AQWA-NAUT conducts the calculations forhydrodynamic parameters in the time domain under thespecific wave conditions [18] The module will call the addedmass radiation damping and diffraction force from AQWA-LINE during the computations The motion response of thefloating structures will be outputted after integrating effectsof hinges and anchor lines among bodies AQWA-NAUT alsorecalculates the Froude-Krylov force during every time stepconsidering influences of wet surface area variation on thenonlinear dynamics
All the structures and grids will be generated in AnsysMechanical APDL software and then transferred as theAQWA executive files In the present paper the scheme in thenumerical model is slightly simplified where the crane pilesare cancelled and the buoy is fixed on the guide rod withoutany relative motions Some corresponding parameters areshown in Figure 2(a) the water depth is fixed as 10mand the buoy diameter and height are 18m and 095mrespectively The taut lines linking the damping plate andthe seabed weights are called SWL and those linking theclump and seabed weights are defined as CWLThe diameter
of the damping plate is 119863 and the distance between twoseabed weights is 119878 The total weight of the floating facility isaround 8 ton For different shape parameters in the followingcalculating cases the height of clumpweight ℎ
119908 the height of
the guide rod between the damping plate and clump weightℎ
119866 and height of damping plate ℎ
119901 are adjusted which will
keep the system center of gravity 50mm below the top ofclump weight The center of buoyancy is kept at the center ofthe damping plate using the same methodThe net buoyancyis around 45sim98 kN It should be noted that two CWLs andtwin seabed weights will merge to be one line and one weightwhen 119878 = 0 The diameter of wire rope used as the taut line is14mm and its elasticity modulus is 206GPa Following theChinese code of wire ropes the allowed maximum tensileforce is 138 kN [19]
The grid structures in the numerical model are shownin Figure 2(b) the node number is up to 3074 Shell 181element is utilized to generate all the nonline structuresEach element has four nodes with 6 DOF which also candegenerate to the triangular elements Pipe 16 element whichhas two nodes is used for taut lines model setup The originof coordinates locates at the intersection of the center axisof the wave energy converter and still water surface Theorientations of 119909 119910 and 119911 axes follow the directions shownin Figure 2(b) In the software the wire rope extensions willbe conducted automatically at the start of analysis becauseof the equilibrium of resultant force at rest Based on themodulus of elasticity and several trials following the softwaremanuals wire ropes are all shortened to 95 of the requiredlengths considering taut effects as line pretensions which willmake system components get to the preset positions in thepreliminary design The incident wave period 119879 varies from30 s to 70 s 119867 = 05m is utilized as the operating waveheight 119867 = 14m is the extreme wave condition The timestep used in all the calculations is 005 s
33 Experimental Validation In order to validate the capabil-ity of the present numerical model on floating body motionunder wave excitation experimental data of the oscillatingmotion of the buoy are used for the validation The buoy isrestricted to move in one degree of freedom along the guiderod without any damping plates which is fixed to the tankbottom All the physical model tests were carried out in thewave tank of Shandong Provincial Key Laboratory of OceanEngineering Ocean University of China [20] Regular waveswith different conditions are employed in the experimentsAlthough the experimental contents are somehow differentfrom the WEC system in the present paper the validationof buoyrsquos 1D motions still could provide solid evidenceexplicitly on the capability of the numerical model on thehydrodynamic characteristics of floating bodies driven bywaves
Comparisons between the numerical and experimentalresults of the buoy heaving amplitudes are shown in Figure 3Numerical model slightly overpredicts all the results becauseof the ideal conditions and ignoring all nonlinear effectsMean error of the numerical predictions is 89 Goodagreements show that the numerical model could be applied
Mathematical Problems in Engineering 5
D
6000
300
2000
1000
800
3500
10000
SWL
CWL
S
Unit mm
(a) Parameters of WEC
Z
X
Y
Z
(b) Structure and grids in the numerical model (snapshot fromthe software)
Figure 2 Numerical model setup of WEC with mooring system
in the further investigation for wave-structure interactionanalysis It also should be pointed out that the mooringline dynamic mechanics are not verified here which can bereferred to the software manual and calculation examples[16ndash18]
4 Results and Discussion
For the mooring system of heaving type point absorberwave energy converter it is very important to keep thewhole facility in stationary state which will provide a betteroperating condition for the buoy to oscillate along the guiderod Hence the displacements in the six degrees of freedomwill be treated as the evaluating indexes in the present paperThe damping plate and the taut line system are designed andtested to reduce the movements in 6 DOF Time historiesof the mooring system displacements and tensile forces oftaut lines are demonstrated first Effects of damping platediameter taut line number and mooring types are thenstudied Based on the above investigation results tensionloads under the extreme wave conditions are calculated toverify the safety of wire ropes as taut lines
41 TimeHistoryDataAnalysis A typical case of themooringsystem is used for time domain results demonstration Theincident waves come from left side The diameter of damp
15 175 2 225 250
005
01
015
02
AQWA (H= 010m)EXP (H= 010m)
AQWA (H= 015m)EXP (H= 015m)
Buoy
mot
ion
ampl
itude
(m)
Period T (s)
Figure 3 Comparison between experimental and numerical heav-ing amplitudes of the buoy
plate is119863 = 50mTwo SWLs and twoCWLs are linked to thetwin seabed weights and the ratio 119878119863 = 10 The incident
6 Mathematical Problems in Engineering
Tran
slatio
n di
spla
cem
ent (
m)
tT
10 11 12 13 14 15 16minus006
minus004
minus002
0
002
004
006
Surge XSway Y
Heave Z
(a) Translation displacement
tT
10 11 12 13 14 15 16
Rota
tion
disp
lace
men
t (de
g)
minus1
minus05
0
05
1
PitchRollYaw
(b) Rotation displacement
tT
10 11 12 13 14 158
10
12
14
16
18
20
Tens
ion
(kN
)
CWL LCWL R
SWL LSWL R
(c) Tension forces on various taut lines
Figure 4 Time histories of mooring system motions and forces (119867 = 05m 119879 = 40 s119863 = 50m and 119878 = 50m 2 CWLs 2 SWLs)
wave height and period are 119867 = 05m and 119879 = 40 srespectively Time histories of translation and rotation dis-placements of the system center of gravity and tensile forceson taut lines are displayed in Figure 4 The data are derivedfrom the timing when initial incident wave effects disappear
It can be seen in Figure 4(a) that the translating motionvaries in the sinusoidal pattern under regular waves Theamplitudes reduce in order of surge heave and sway It canbe seen that the amplitudes of swaying motions are quitesmall and less than 20 times 10minus3m because of the wave incidentdirection Heaving and surging motions under incidentwave forces are dominated in the translation movementTheir peak-to-valley values are significantly smaller than thecriteria values For the rotation displacement in Figure 4(b)
rotations around three axes demonstrate the quasi-sinusoidaland resilient pattern All the amplitudes are less than 1 degreeThe rotating values in other calculated cases are also verysmall which indicates that rotation displacement does nothave to be treated as the control elements in the furtheranalysis for the mooring stability
The variations of tensions on four taut lines are illustratedin Figure 4(c) The positions of two pairs of taut lines in Fig-ure 2(a) are defined following the incident wave directionsThe patterns of four curves are all sinusoidal under regularwave conditions Phase differences of curves are decided bythe mooring system movements in 6 DOF Furthermoretension forces on two CWLs are evidently larger than that ofSWLs and should be used as the checking lines
Mathematical Problems in Engineering 7
3 4 5 6 70
05
1
15
D = 3mD= 4mD= 5m
Am
plitu
de o
f sur
geX
(m)
Period T (s)
(a) Surge119883
3 4 5 6 70
05
1
15
Am
plitu
de o
f hea
ve Z
(m)
D= 3mD= 4mD= 5m
Period T (s)
(b) Heave 119885
Figure 5 Effects of damping plate diameters on mooring system stability
42 Effects of Damping Plate Diameters Damping plate isused to compete against the motion caused by the incidentwaves in order to give the appropriate stability of themooringsystemThe diameter119863 varies as 30m 40m and 50m andthe height is fixed as 03m Only one CWL links the clumpweight and the single seabed weight Operating wave height119867 = 05m is used to deal with all five periods
Effects of damping plate diameters on mooring stabilityare shown in Figure 5 Surge motions are represented bythe maximum of surge offset values Maximums of troughto crest height values in every period express correspondingheave motions Data processing in the latter context as wellas Figures 6 and 7 also follows the same principle as aboveSway motions and rotation displacements are observed tobe very small under all calculated conditions and are notillustrated here No obvious regularities of diameter effectshave been found in the figures In Figure 5(a) the surgeamplitudes are mostly violent because the single verticalCWL is hard to restrain the horizontal motions On thecontrary in Figure 5(b) the 5m damping plate cooperatingwith the single CWL shows best performance to reduce themotions in the vertical direction Therefore 119863 = 5m ischosen to be the optimized diameter of the damping plateSince the surge amplitudes under the condition 119863 = 50mexceed the presupposed criterion diagonal taut lines shouldbe installed to prevent large horizontal movements
43 Effects of Taut Line System Considering the perfor-mance of single CWL on the mooring system stability twoCWLs are proposed with twin seabed weights The openinglevel of CWLs is represented by ratio 119878119863 varying from
0 to 10 Figure 6 illustrates effects of 119878119863 ratios on surgeand heave motions In Figure 6(a) it can be seen that thehorizontal moving amplitudes become smaller as 119878119863 ratioincreases The reducing range also decreases as 119878119863 becomesgreater Two peaks could be observed at 119879 = 40 s and 119879 =
60 s The surge amplitude is up to 065 at 119879 = 40 s when119878119863 ratio is zero and it satisfies the criterion when 119878119863
is larger than 04 The ratio 119878119863 = 10 shows the bestperformance to add the horizontal stability over the waveperiod range
In Figure 6(b) the heave motions do not show any obvi-ous distributing regularity according to 119878119863 ratio variationIt can be seen that most heaving values under small 119878119863ratios are less than 01m which fits the proposed mooringstability criterion in this paper As 119878119863 increases especially119878119863 = 10 most values over the period domain approachor exceed 01m which affects the surge motion oppositely Itis because larger 119878119863 ratios with greater opening angles willreduce the vertical tension under the same confined stress ofwire ropes
In order to deal with the paradoxical effects of 119878119863 =
10 on surge and heave motions two SWLs are added toreduce the vertical motions obtained with only CWLs InFigure 6(a) the coupled taut lines indeed show best per-formance on surge inhibitions and the amplitudes over theperiod domain decrease to less than 0025m On the otherhand effects on the heaving reduction are also evident andthe indicating values are all less than 005m Instead of settingadditional vertical CWL and weights the present designcould utilize two seabed weights at maximum extent tocontrol the costs
8 Mathematical Problems in Engineering
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
08
07
06
05
04
03
02
01
0
Period T (s)
(a) Surge119883
3 4 5 6 7
Am
plitu
de o
f hea
ve Z
(m)
04
03
02
01
0
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
Period T (s)
(b) Heave 119885
Figure 6 Effects of 119878119863 ratio on mooring system stability
44 Effects of Incident Wave Directions Since the layout oftaut lines is designed to be parallel to the incident wavedirection it is necessary to study the operating performanceof the mooring system under oblique waves Two angles areemployed as 45∘ and 90∘ in Figure 7(a) which are definedas included angles between incident wave directions and thelayout line of CWLs and SWLs119867 = 05m is still employed asthe operating wave height Figures 7(b) to 7(c) display effectsof incident wave directions on mooring system movementsin horizontal and vertical directions
In Figure 7(b) sway amplitudes become significantlygreater as expected when the incident angle increases Mostcalculated results under oblique waves exceed 02m for surgemotion A peak also can be found at 119879 = 50 s for both45∘ and 90∘ The maximum value is 088 which is over 4times higher than the criterion value For surge motions inFigure 7(c) the amplitudes under variouswave conditions areall less than 005m which will not affect the buoy operationobviously under oblique waves Although heave motions arenot increased as sharply as sways in Figure 7(d) their effectson the operating performance of oscillating buoys WEC aremore sensitiveTherefore it can be seen that current design ofmooring system cannot compete with oblique waves as wellas waves from the forward direction If at least two meandirections are employed in the design it can be imaginedthat cross arrangement of two sets of CWLs and SWLs willprovide a good performance to confront waves from variousdirections
45 Tension Analysis Tensile forces on the taut lines arecalculated under extreme wave conditions (119867 = 14m) withthree incident wave directions The mooring system is asfollows 2 SWLs and 2 CWLs 119878119863 = 10 The maximumvalues under each condition are extracted from time historiesof tension forces on all taut lines which occurs mostly onthe left CWL in Figure 2 The above values under variousincident directions are illustrated in Figure 8 It can be seenthat maximum tensions occur at 119879 = 40 s for all waveconditions and they decrease sharply as the wave periodincreases Although maximum tensions under all extremewave conditions do not exceed the allowed value of 138 kNthe tensile forces have approached this limit at 119879 = 40 swhich should be noted in the further design formore securityspace
5 Conclusions
A small oscillating wave energy converter has been designedfor electricity supply of nearshore ocean buoys The mooringsystem utilizes wire ropes as taut lines to connect thedamping plate and clump weight with seabed weights whichare investigated numerically to provide stationary state forheaving buoy operation Ansys-AQWAwas used to deal withthe potential flow waves and fluid structure interactions inthe time domain
It has been found that the damping plate could pro-vide a good station-keeping for the energy converting
Mathematical Problems in Engineering 9
CWL CWL
Y
X
O
0∘
45∘
90∘
(a) Incident angles of oblique waves
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(b) Surge119883
3 4 5 6 7
Am
plitu
de o
f sw
ay Y
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(c) Sway
3 4 5 6 7
1
08
06
04
02
0
Am
plitu
de o
f hea
ve Z
(m)
0∘
45∘
90∘
Period T (s)
(d) Heave 119885
Figure 7 Effects of incident wave direction on mooring system stability
compartment Under the current design parameters thediameter 119863 = 50m of the damping plate with single CWLshows best restraining results on the heaving motion of themooring facilities which also needs more support to controlthe surge Twin CWLs are then investigated and the ratio119878119863 = 10 can significantly reduce the surge motion andtwo added SWLs could help to reduce both surge and heaveamplitudes Oblique wave testing results suggest adding
the cross arrangement of CWLs and SWLs to deal with moreincident wave directions Calculated tensile forces on the tautlines demonstrate that the present design satisfies the allowedtension criterion
All the above results show that the mooring system uti-lized and optimized here is feasible and reliable In the futuremore detailed design is to be carried out for the prototypemachine manufacture Through rough calculations the costs
10 Mathematical Problems in Engineering
3 4 5 6 70
30
60
90
120
150
Tens
ion
(kN
)
0∘
45∘
90∘
Period T (s)
Figure 8 Tension forces on taut lines under extreme wave condi-tions
of the present mooring system are about 40 lower thanthose of the traditional 4 or 5 points mooring system Seatrials will be conducted in order to test the station-keepingcapability of the present mooring system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to the financial support provided byNational Natural Science Foundation of China (41376100)National High Technology Research and Development Pro-gram of China (863 Project 2012AA052601) Special Fundfor Ocean Renewable Energy of SOA (QDME2011GD02)Shandong Natural Science Funds for Distinguished YoungScholar (JQ201314) Qingdao Municipal Science amp Technol-ogy Program (13-4-1-38-hy) and the Program of IntroducingTalents of Discipline to Universities (111 Project B14028)
References
[1] E B Agamloh A KWallace and A von Jouanne ldquoApplicationof fluidndashstructure interaction simulation of an ocean waveenergy extraction devicerdquo Renewable Energy vol 33 no 4 pp748ndash757 2008
[2] Y-H Yu and Y Li ldquoReynolds-Averaged Navier-Stokes simula-tion of the heave performance of a two-body floating-pointabsorber wave energy systemrdquo Computers amp Fluids vol 73 pp104ndash114 2013
[3] A Umar and T K Datta ldquoNonlinear response of a mooredbuoyrdquo Ocean Engineering vol 30 no 13 pp 1625ndash1646 2003
[4] R Guanche V Gomez C Vidal and I Eguinoa ldquoNumericalanalysis and performance optimization of a submerged waveenergy point absorberrdquoOcean Engineering vol 59 pp 214ndash2302013
[5] Z-M Yuan A Incecik and C Y Ji ldquoNumerical study on ahybrid mooring system with clump weights and buoysrdquo OceanEngineering vol 88 pp 1ndash11 2014
[6] G Benassai A Campanile V Piscopo and A ScamardellaldquoMooring control of semi-submersible structures for windturbinesrdquo Procedia Engineering vol 70 pp 132ndash141 2014
[7] V Harnois S D Weller L Johanning et al ldquoNumerical modelvalidation for mooring systems method and application forwave energy convertersrdquoRenewable Energy vol 75 pp 869ndash8872015
[8] E E Bachynski Y L Young and R W Yeung ldquoAnalysis andoptimization of a tethered wave energy converter in irregularwavesrdquo Renewable Energy vol 48 pp 133ndash145 2012
[9] V Krivtsov and B Linfoot ldquoDisruption to benthic habitats bymoorings of wave energy installations a modelling case studyand implications for overall ecosystem functioningrdquo EcologicalModelling vol 245 pp 121ndash124 2012
[10] P C Vicente A F D O Falcao L M C Gato and P A PJustino ldquoDynamics of arrays of floating point-absorber waveenergy converters with inter-body and bottom slack-mooringconnectionsrdquoAppliedOcean Research vol 31 no 4 pp 267ndash2812009
[11] E Vijayakrishna Rapaka R Natarajan and S NeelamanildquoExperimental investigation on the dynamic response of amoored wave energy device under regular sea wavesrdquo OceanEngineering vol 31 no 5-6 pp 725ndash743 2004
[12] C Ji and Z Yuan ldquoExperimental study of a hybrid mooringsystemrdquo Journal of Marine Science and Technology vol 20 no2 pp 213ndash225 2015
[13] S Ambuhl M Sterndorff and J D Soslashrensen ldquoExtrapolationof extreme response for different mooring line systems of float-ing wave energy convertersrdquo International Journal of MarineEnergy vol 7 pp 1ndash19 2014
[14] J Fitzgerald and L Bergdahl ldquoIncluding moorings in theassessment of a generic offshore wave energy converter afrequency domain approachrdquo Marine Structures vol 21 no 1pp 23ndash46 2008
[15] P R Thies L Johanning V Harnois H C M Smith and DN Parish ldquoMooring line fatigue damage evaluation for floatingmarine energy converters field measurements and predictionrdquoRenewable Energy vol 63 pp 133ndash144 2014
[16] AnsysAQWATheoryManual Release 150 Ansys CanonsburgPa USA 2013
[17] Ansys AQWA-LINE Manual Release 145 Ansys CanonsburgPa USA 2012
[18] Ansys Inc AQWA-NAUT Manual Release 145 2012[19] Standardization Administration of Peoplersquos Republic of China
National Code of PRC Steel Wire Ropes for Important Pur-poses GB8918-2006 StandardizationAdministration of PeoplersquosRepublic of China 2006
[20] Q Na Study on hydrodynamic performance of oscillating buoyWEC considering power take-off system [MS thesis] OceanUniversity of China Qingdao China 2015 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Heaving buoy
Guide rod
Rack and gear
Damping plate
Crane piles
Clump weight
Taut line
Seabed weight
Figure 1 Schematic of 1 kW heaving body wave energy converter
Cartesian coordinate system the velocity potential velocityand free surface elevation can be expressed as
119902 (119909 119910 119911 119905) = Re 119906 (119909 119910 119911) 119890minus119894120596119905
120577 (119909 119910 119911 119905) = Re 120578 (119909 119910) 119890minus119894120596119905
Φ (119909 119910 119911 119905) = 120601 (119909 119910 119911) 119890
minus119894120596119905
(1)
where 119906(119909 119910 119911) = nabla120593(119909 119910 119911) 119902 is the fluid particle velocity120596 is the wave frequency (in rads) 120577 is the surface elevationand Φ(119909 119910 119911 119905) is the velocity potential The origin of thereference is at the still water surface The orientation of thevertical axis 119911 is upward
By accounting for wave radiation and diffraction thefluid structure interaction behavior is described by the set ofequations
Laplace equations nabla2Φ(119909 119910 119911 119905) = 0 (2)
applicable everywhere in the fluid domain Consider
Linear free surface boundary 1205972Φ
120597119905
2 +119892
120597Φ
120597119911
= 0
Body surface conditions 120597Φ120597119899
= 119880
119895119899
119895
Seabed surface condition at depth of 119867 120597Φ
120597119899
1003816
1003816
1003816
1003816
1003816
1003816
1003816
1003816119911=minus119867
= 0
(3)
Radiation conditions are as follows Wave propagation couldbe found far from the body surface 119880
119895is the generalized
velocity of body surface 119899119895is the generalized normal vector
of the specific point on the body surface and subscript 119895 isthe 119895th mode of motion of the above components
The velocity potential could be expressed by using super-position principle as follows
Φ(119909 119910 119911 119905) = Φ
119868
(119909 119910 119911 119905) +Φ
119863
(119909 119910 119911 119905)
+Φ
119877
(119909 119910 119911 119905)
(4)
where Φ
119868
(119909 119910 119911 119905) is the incident wave potential Φ119877(119909 119910119911 119905) is the radiation potential and Φ
119863
(119909 119910 119911 119905) is the dif-fraction potential respectively In addition Φ119863 + Φ
119877
= Φ
119875which are called the disturbing potential together
Assuming that the body motion is small around the stillwater surface the velocity potential Φ(119909 119910 119911 119905) could beexpressed as
Φ(119909 119910 119911 119905) = Re 120601 (119909 119910 119911) 119890minus119894120596119905 (5)
where 120601(119909 119910 119911) can be called the isolated space dependentpotentialThe solution could be regarded as a steady problemwhich is expressed as
120601 (119909 119910 119911) = 120601
119868
(119909 119910 119911) + 120601
119863
(119909 119910 119911) + 120601
119877
(119909 119910 119911) (6)
where 120601
119868 is the incident wave velocity potential at a singledirection within a single frequency It can be resolved by thefollowing equation
120601
119868
= minus
119860119892
120596
cosh 119896 (119911 + ℎ)
cosh 119896ℎexp [119894119896 (119909 cos120573+119910 cos120573)] (7)
where 119860 is the wave amplitude 119896 is the wave number ℎ isthe water depth 119892 is the gravity acceleration 120582 is the wavelength and 120573 is the included angle between the incident wavedirection and the 119909 axis 119896 can be defined as 2120587120582 which iscalculated by the free surface and water depth conditions
In order to derive the motion of the system motion in sixdegrees of freedom the motion equation of the floating bodyin the time domain should be considered and expressed asfollows [16]
(119872+119898)
119883 (119905) +int
119905
minusinfin
119870 (119905 minus 120591)
119883 (119905) 119889120591 +119862119883 (119905)
= 119865
119908(119905) + 119865wind +119865119888 +119865sn (119905) + 119865119898 (119905)
(8)
where 119883(119905) represents the transit translation displacementin three directions (119909 119910 and 119911 axes) 119872 and 119898 are thegeneralized mass matrix and added mass matrix 119870(119905 minus 120591) isthe delay function of the system and 119862 is the hydrostaticrestoring force coefficient matrix 119865
119908(119905) 119865wind 119865119888 119865sn(119905) and
119865
119898(119905) are the first-order wave force wind force current force
second-order wave force and tension loads on taut lines inthe corresponding directions respectively In this study windand current forces are ignored regarding themeasured data oflocal sea areas so only the wave forces are considered
4 Mathematical Problems in Engineering
First-order wave force can be resolved from the convo-lution relationship between the wave force on the frequencyand time domains proposed by Cummins The equation isexpressed as
119865
119908119894(119905) = int
119905
0ℎ
1119894
(119905 minus 120591) 119889120591
ℎ
1119894
(119905) =
1120587
int
infin
0119867
1119894
(120596) 119890
119894120596119905
119889120596
(9)
where1198671119894
is the responding function of the first-order regularwave force of the unit amplitude
The calculation of second-order wave force could beconducted using the method proposed by Newman Basedon the indirect time domain method after the Fouriertransform the delay function can be expressed as
119870
119894119895(119905) =
2120587
int
infin
0120582
119894119895(120596) cos (120596119905) 119889120596 (10)
where 120582119894119895is the damping matrix of the floating body in the
frequency domainAdded mass in the time domain can be expressed as
119898
119894119895= 119906
119894119895(1205960) +
11205960
int
infin
0119870
119894119895(119905) sin (1205960119905) 119889119905 (11)
where 119906 is the added mass matrix of the floating body in thefrequency domain and 120596
0is random number
32 Numerical Solutions Ansys-AQWA is the commercialcomputational fluid dynamics software based on the govern-ing equations described in Section 31 All the calculations ofthe above equations are coupled in two modules for the finalanalysis AQWA-LINE deals with the applications of diffrac-tion and radiation theories for fluid structure interaction [17]The modules can also calculate the first- and second-orderwave forces on the floating structures and further responseIn addition AQWA-NAUT conducts the calculations forhydrodynamic parameters in the time domain under thespecific wave conditions [18] The module will call the addedmass radiation damping and diffraction force from AQWA-LINE during the computations The motion response of thefloating structures will be outputted after integrating effectsof hinges and anchor lines among bodies AQWA-NAUT alsorecalculates the Froude-Krylov force during every time stepconsidering influences of wet surface area variation on thenonlinear dynamics
All the structures and grids will be generated in AnsysMechanical APDL software and then transferred as theAQWA executive files In the present paper the scheme in thenumerical model is slightly simplified where the crane pilesare cancelled and the buoy is fixed on the guide rod withoutany relative motions Some corresponding parameters areshown in Figure 2(a) the water depth is fixed as 10mand the buoy diameter and height are 18m and 095mrespectively The taut lines linking the damping plate andthe seabed weights are called SWL and those linking theclump and seabed weights are defined as CWLThe diameter
of the damping plate is 119863 and the distance between twoseabed weights is 119878 The total weight of the floating facility isaround 8 ton For different shape parameters in the followingcalculating cases the height of clumpweight ℎ
119908 the height of
the guide rod between the damping plate and clump weightℎ
119866 and height of damping plate ℎ
119901 are adjusted which will
keep the system center of gravity 50mm below the top ofclump weight The center of buoyancy is kept at the center ofthe damping plate using the same methodThe net buoyancyis around 45sim98 kN It should be noted that two CWLs andtwin seabed weights will merge to be one line and one weightwhen 119878 = 0 The diameter of wire rope used as the taut line is14mm and its elasticity modulus is 206GPa Following theChinese code of wire ropes the allowed maximum tensileforce is 138 kN [19]
The grid structures in the numerical model are shownin Figure 2(b) the node number is up to 3074 Shell 181element is utilized to generate all the nonline structuresEach element has four nodes with 6 DOF which also candegenerate to the triangular elements Pipe 16 element whichhas two nodes is used for taut lines model setup The originof coordinates locates at the intersection of the center axisof the wave energy converter and still water surface Theorientations of 119909 119910 and 119911 axes follow the directions shownin Figure 2(b) In the software the wire rope extensions willbe conducted automatically at the start of analysis becauseof the equilibrium of resultant force at rest Based on themodulus of elasticity and several trials following the softwaremanuals wire ropes are all shortened to 95 of the requiredlengths considering taut effects as line pretensions which willmake system components get to the preset positions in thepreliminary design The incident wave period 119879 varies from30 s to 70 s 119867 = 05m is utilized as the operating waveheight 119867 = 14m is the extreme wave condition The timestep used in all the calculations is 005 s
33 Experimental Validation In order to validate the capabil-ity of the present numerical model on floating body motionunder wave excitation experimental data of the oscillatingmotion of the buoy are used for the validation The buoy isrestricted to move in one degree of freedom along the guiderod without any damping plates which is fixed to the tankbottom All the physical model tests were carried out in thewave tank of Shandong Provincial Key Laboratory of OceanEngineering Ocean University of China [20] Regular waveswith different conditions are employed in the experimentsAlthough the experimental contents are somehow differentfrom the WEC system in the present paper the validationof buoyrsquos 1D motions still could provide solid evidenceexplicitly on the capability of the numerical model on thehydrodynamic characteristics of floating bodies driven bywaves
Comparisons between the numerical and experimentalresults of the buoy heaving amplitudes are shown in Figure 3Numerical model slightly overpredicts all the results becauseof the ideal conditions and ignoring all nonlinear effectsMean error of the numerical predictions is 89 Goodagreements show that the numerical model could be applied
Mathematical Problems in Engineering 5
D
6000
300
2000
1000
800
3500
10000
SWL
CWL
S
Unit mm
(a) Parameters of WEC
Z
X
Y
Z
(b) Structure and grids in the numerical model (snapshot fromthe software)
Figure 2 Numerical model setup of WEC with mooring system
in the further investigation for wave-structure interactionanalysis It also should be pointed out that the mooringline dynamic mechanics are not verified here which can bereferred to the software manual and calculation examples[16ndash18]
4 Results and Discussion
For the mooring system of heaving type point absorberwave energy converter it is very important to keep thewhole facility in stationary state which will provide a betteroperating condition for the buoy to oscillate along the guiderod Hence the displacements in the six degrees of freedomwill be treated as the evaluating indexes in the present paperThe damping plate and the taut line system are designed andtested to reduce the movements in 6 DOF Time historiesof the mooring system displacements and tensile forces oftaut lines are demonstrated first Effects of damping platediameter taut line number and mooring types are thenstudied Based on the above investigation results tensionloads under the extreme wave conditions are calculated toverify the safety of wire ropes as taut lines
41 TimeHistoryDataAnalysis A typical case of themooringsystem is used for time domain results demonstration Theincident waves come from left side The diameter of damp
15 175 2 225 250
005
01
015
02
AQWA (H= 010m)EXP (H= 010m)
AQWA (H= 015m)EXP (H= 015m)
Buoy
mot
ion
ampl
itude
(m)
Period T (s)
Figure 3 Comparison between experimental and numerical heav-ing amplitudes of the buoy
plate is119863 = 50mTwo SWLs and twoCWLs are linked to thetwin seabed weights and the ratio 119878119863 = 10 The incident
6 Mathematical Problems in Engineering
Tran
slatio
n di
spla
cem
ent (
m)
tT
10 11 12 13 14 15 16minus006
minus004
minus002
0
002
004
006
Surge XSway Y
Heave Z
(a) Translation displacement
tT
10 11 12 13 14 15 16
Rota
tion
disp
lace
men
t (de
g)
minus1
minus05
0
05
1
PitchRollYaw
(b) Rotation displacement
tT
10 11 12 13 14 158
10
12
14
16
18
20
Tens
ion
(kN
)
CWL LCWL R
SWL LSWL R
(c) Tension forces on various taut lines
Figure 4 Time histories of mooring system motions and forces (119867 = 05m 119879 = 40 s119863 = 50m and 119878 = 50m 2 CWLs 2 SWLs)
wave height and period are 119867 = 05m and 119879 = 40 srespectively Time histories of translation and rotation dis-placements of the system center of gravity and tensile forceson taut lines are displayed in Figure 4 The data are derivedfrom the timing when initial incident wave effects disappear
It can be seen in Figure 4(a) that the translating motionvaries in the sinusoidal pattern under regular waves Theamplitudes reduce in order of surge heave and sway It canbe seen that the amplitudes of swaying motions are quitesmall and less than 20 times 10minus3m because of the wave incidentdirection Heaving and surging motions under incidentwave forces are dominated in the translation movementTheir peak-to-valley values are significantly smaller than thecriteria values For the rotation displacement in Figure 4(b)
rotations around three axes demonstrate the quasi-sinusoidaland resilient pattern All the amplitudes are less than 1 degreeThe rotating values in other calculated cases are also verysmall which indicates that rotation displacement does nothave to be treated as the control elements in the furtheranalysis for the mooring stability
The variations of tensions on four taut lines are illustratedin Figure 4(c) The positions of two pairs of taut lines in Fig-ure 2(a) are defined following the incident wave directionsThe patterns of four curves are all sinusoidal under regularwave conditions Phase differences of curves are decided bythe mooring system movements in 6 DOF Furthermoretension forces on two CWLs are evidently larger than that ofSWLs and should be used as the checking lines
Mathematical Problems in Engineering 7
3 4 5 6 70
05
1
15
D = 3mD= 4mD= 5m
Am
plitu
de o
f sur
geX
(m)
Period T (s)
(a) Surge119883
3 4 5 6 70
05
1
15
Am
plitu
de o
f hea
ve Z
(m)
D= 3mD= 4mD= 5m
Period T (s)
(b) Heave 119885
Figure 5 Effects of damping plate diameters on mooring system stability
42 Effects of Damping Plate Diameters Damping plate isused to compete against the motion caused by the incidentwaves in order to give the appropriate stability of themooringsystemThe diameter119863 varies as 30m 40m and 50m andthe height is fixed as 03m Only one CWL links the clumpweight and the single seabed weight Operating wave height119867 = 05m is used to deal with all five periods
Effects of damping plate diameters on mooring stabilityare shown in Figure 5 Surge motions are represented bythe maximum of surge offset values Maximums of troughto crest height values in every period express correspondingheave motions Data processing in the latter context as wellas Figures 6 and 7 also follows the same principle as aboveSway motions and rotation displacements are observed tobe very small under all calculated conditions and are notillustrated here No obvious regularities of diameter effectshave been found in the figures In Figure 5(a) the surgeamplitudes are mostly violent because the single verticalCWL is hard to restrain the horizontal motions On thecontrary in Figure 5(b) the 5m damping plate cooperatingwith the single CWL shows best performance to reduce themotions in the vertical direction Therefore 119863 = 5m ischosen to be the optimized diameter of the damping plateSince the surge amplitudes under the condition 119863 = 50mexceed the presupposed criterion diagonal taut lines shouldbe installed to prevent large horizontal movements
43 Effects of Taut Line System Considering the perfor-mance of single CWL on the mooring system stability twoCWLs are proposed with twin seabed weights The openinglevel of CWLs is represented by ratio 119878119863 varying from
0 to 10 Figure 6 illustrates effects of 119878119863 ratios on surgeand heave motions In Figure 6(a) it can be seen that thehorizontal moving amplitudes become smaller as 119878119863 ratioincreases The reducing range also decreases as 119878119863 becomesgreater Two peaks could be observed at 119879 = 40 s and 119879 =
60 s The surge amplitude is up to 065 at 119879 = 40 s when119878119863 ratio is zero and it satisfies the criterion when 119878119863
is larger than 04 The ratio 119878119863 = 10 shows the bestperformance to add the horizontal stability over the waveperiod range
In Figure 6(b) the heave motions do not show any obvi-ous distributing regularity according to 119878119863 ratio variationIt can be seen that most heaving values under small 119878119863ratios are less than 01m which fits the proposed mooringstability criterion in this paper As 119878119863 increases especially119878119863 = 10 most values over the period domain approachor exceed 01m which affects the surge motion oppositely Itis because larger 119878119863 ratios with greater opening angles willreduce the vertical tension under the same confined stress ofwire ropes
In order to deal with the paradoxical effects of 119878119863 =
10 on surge and heave motions two SWLs are added toreduce the vertical motions obtained with only CWLs InFigure 6(a) the coupled taut lines indeed show best per-formance on surge inhibitions and the amplitudes over theperiod domain decrease to less than 0025m On the otherhand effects on the heaving reduction are also evident andthe indicating values are all less than 005m Instead of settingadditional vertical CWL and weights the present designcould utilize two seabed weights at maximum extent tocontrol the costs
8 Mathematical Problems in Engineering
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
08
07
06
05
04
03
02
01
0
Period T (s)
(a) Surge119883
3 4 5 6 7
Am
plitu
de o
f hea
ve Z
(m)
04
03
02
01
0
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
Period T (s)
(b) Heave 119885
Figure 6 Effects of 119878119863 ratio on mooring system stability
44 Effects of Incident Wave Directions Since the layout oftaut lines is designed to be parallel to the incident wavedirection it is necessary to study the operating performanceof the mooring system under oblique waves Two angles areemployed as 45∘ and 90∘ in Figure 7(a) which are definedas included angles between incident wave directions and thelayout line of CWLs and SWLs119867 = 05m is still employed asthe operating wave height Figures 7(b) to 7(c) display effectsof incident wave directions on mooring system movementsin horizontal and vertical directions
In Figure 7(b) sway amplitudes become significantlygreater as expected when the incident angle increases Mostcalculated results under oblique waves exceed 02m for surgemotion A peak also can be found at 119879 = 50 s for both45∘ and 90∘ The maximum value is 088 which is over 4times higher than the criterion value For surge motions inFigure 7(c) the amplitudes under variouswave conditions areall less than 005m which will not affect the buoy operationobviously under oblique waves Although heave motions arenot increased as sharply as sways in Figure 7(d) their effectson the operating performance of oscillating buoys WEC aremore sensitiveTherefore it can be seen that current design ofmooring system cannot compete with oblique waves as wellas waves from the forward direction If at least two meandirections are employed in the design it can be imaginedthat cross arrangement of two sets of CWLs and SWLs willprovide a good performance to confront waves from variousdirections
45 Tension Analysis Tensile forces on the taut lines arecalculated under extreme wave conditions (119867 = 14m) withthree incident wave directions The mooring system is asfollows 2 SWLs and 2 CWLs 119878119863 = 10 The maximumvalues under each condition are extracted from time historiesof tension forces on all taut lines which occurs mostly onthe left CWL in Figure 2 The above values under variousincident directions are illustrated in Figure 8 It can be seenthat maximum tensions occur at 119879 = 40 s for all waveconditions and they decrease sharply as the wave periodincreases Although maximum tensions under all extremewave conditions do not exceed the allowed value of 138 kNthe tensile forces have approached this limit at 119879 = 40 swhich should be noted in the further design formore securityspace
5 Conclusions
A small oscillating wave energy converter has been designedfor electricity supply of nearshore ocean buoys The mooringsystem utilizes wire ropes as taut lines to connect thedamping plate and clump weight with seabed weights whichare investigated numerically to provide stationary state forheaving buoy operation Ansys-AQWAwas used to deal withthe potential flow waves and fluid structure interactions inthe time domain
It has been found that the damping plate could pro-vide a good station-keeping for the energy converting
Mathematical Problems in Engineering 9
CWL CWL
Y
X
O
0∘
45∘
90∘
(a) Incident angles of oblique waves
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(b) Surge119883
3 4 5 6 7
Am
plitu
de o
f sw
ay Y
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(c) Sway
3 4 5 6 7
1
08
06
04
02
0
Am
plitu
de o
f hea
ve Z
(m)
0∘
45∘
90∘
Period T (s)
(d) Heave 119885
Figure 7 Effects of incident wave direction on mooring system stability
compartment Under the current design parameters thediameter 119863 = 50m of the damping plate with single CWLshows best restraining results on the heaving motion of themooring facilities which also needs more support to controlthe surge Twin CWLs are then investigated and the ratio119878119863 = 10 can significantly reduce the surge motion andtwo added SWLs could help to reduce both surge and heaveamplitudes Oblique wave testing results suggest adding
the cross arrangement of CWLs and SWLs to deal with moreincident wave directions Calculated tensile forces on the tautlines demonstrate that the present design satisfies the allowedtension criterion
All the above results show that the mooring system uti-lized and optimized here is feasible and reliable In the futuremore detailed design is to be carried out for the prototypemachine manufacture Through rough calculations the costs
10 Mathematical Problems in Engineering
3 4 5 6 70
30
60
90
120
150
Tens
ion
(kN
)
0∘
45∘
90∘
Period T (s)
Figure 8 Tension forces on taut lines under extreme wave condi-tions
of the present mooring system are about 40 lower thanthose of the traditional 4 or 5 points mooring system Seatrials will be conducted in order to test the station-keepingcapability of the present mooring system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to the financial support provided byNational Natural Science Foundation of China (41376100)National High Technology Research and Development Pro-gram of China (863 Project 2012AA052601) Special Fundfor Ocean Renewable Energy of SOA (QDME2011GD02)Shandong Natural Science Funds for Distinguished YoungScholar (JQ201314) Qingdao Municipal Science amp Technol-ogy Program (13-4-1-38-hy) and the Program of IntroducingTalents of Discipline to Universities (111 Project B14028)
References
[1] E B Agamloh A KWallace and A von Jouanne ldquoApplicationof fluidndashstructure interaction simulation of an ocean waveenergy extraction devicerdquo Renewable Energy vol 33 no 4 pp748ndash757 2008
[2] Y-H Yu and Y Li ldquoReynolds-Averaged Navier-Stokes simula-tion of the heave performance of a two-body floating-pointabsorber wave energy systemrdquo Computers amp Fluids vol 73 pp104ndash114 2013
[3] A Umar and T K Datta ldquoNonlinear response of a mooredbuoyrdquo Ocean Engineering vol 30 no 13 pp 1625ndash1646 2003
[4] R Guanche V Gomez C Vidal and I Eguinoa ldquoNumericalanalysis and performance optimization of a submerged waveenergy point absorberrdquoOcean Engineering vol 59 pp 214ndash2302013
[5] Z-M Yuan A Incecik and C Y Ji ldquoNumerical study on ahybrid mooring system with clump weights and buoysrdquo OceanEngineering vol 88 pp 1ndash11 2014
[6] G Benassai A Campanile V Piscopo and A ScamardellaldquoMooring control of semi-submersible structures for windturbinesrdquo Procedia Engineering vol 70 pp 132ndash141 2014
[7] V Harnois S D Weller L Johanning et al ldquoNumerical modelvalidation for mooring systems method and application forwave energy convertersrdquoRenewable Energy vol 75 pp 869ndash8872015
[8] E E Bachynski Y L Young and R W Yeung ldquoAnalysis andoptimization of a tethered wave energy converter in irregularwavesrdquo Renewable Energy vol 48 pp 133ndash145 2012
[9] V Krivtsov and B Linfoot ldquoDisruption to benthic habitats bymoorings of wave energy installations a modelling case studyand implications for overall ecosystem functioningrdquo EcologicalModelling vol 245 pp 121ndash124 2012
[10] P C Vicente A F D O Falcao L M C Gato and P A PJustino ldquoDynamics of arrays of floating point-absorber waveenergy converters with inter-body and bottom slack-mooringconnectionsrdquoAppliedOcean Research vol 31 no 4 pp 267ndash2812009
[11] E Vijayakrishna Rapaka R Natarajan and S NeelamanildquoExperimental investigation on the dynamic response of amoored wave energy device under regular sea wavesrdquo OceanEngineering vol 31 no 5-6 pp 725ndash743 2004
[12] C Ji and Z Yuan ldquoExperimental study of a hybrid mooringsystemrdquo Journal of Marine Science and Technology vol 20 no2 pp 213ndash225 2015
[13] S Ambuhl M Sterndorff and J D Soslashrensen ldquoExtrapolationof extreme response for different mooring line systems of float-ing wave energy convertersrdquo International Journal of MarineEnergy vol 7 pp 1ndash19 2014
[14] J Fitzgerald and L Bergdahl ldquoIncluding moorings in theassessment of a generic offshore wave energy converter afrequency domain approachrdquo Marine Structures vol 21 no 1pp 23ndash46 2008
[15] P R Thies L Johanning V Harnois H C M Smith and DN Parish ldquoMooring line fatigue damage evaluation for floatingmarine energy converters field measurements and predictionrdquoRenewable Energy vol 63 pp 133ndash144 2014
[16] AnsysAQWATheoryManual Release 150 Ansys CanonsburgPa USA 2013
[17] Ansys AQWA-LINE Manual Release 145 Ansys CanonsburgPa USA 2012
[18] Ansys Inc AQWA-NAUT Manual Release 145 2012[19] Standardization Administration of Peoplersquos Republic of China
National Code of PRC Steel Wire Ropes for Important Pur-poses GB8918-2006 StandardizationAdministration of PeoplersquosRepublic of China 2006
[20] Q Na Study on hydrodynamic performance of oscillating buoyWEC considering power take-off system [MS thesis] OceanUniversity of China Qingdao China 2015 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
First-order wave force can be resolved from the convo-lution relationship between the wave force on the frequencyand time domains proposed by Cummins The equation isexpressed as
119865
119908119894(119905) = int
119905
0ℎ
1119894
(119905 minus 120591) 119889120591
ℎ
1119894
(119905) =
1120587
int
infin
0119867
1119894
(120596) 119890
119894120596119905
119889120596
(9)
where1198671119894
is the responding function of the first-order regularwave force of the unit amplitude
The calculation of second-order wave force could beconducted using the method proposed by Newman Basedon the indirect time domain method after the Fouriertransform the delay function can be expressed as
119870
119894119895(119905) =
2120587
int
infin
0120582
119894119895(120596) cos (120596119905) 119889120596 (10)
where 120582119894119895is the damping matrix of the floating body in the
frequency domainAdded mass in the time domain can be expressed as
119898
119894119895= 119906
119894119895(1205960) +
11205960
int
infin
0119870
119894119895(119905) sin (1205960119905) 119889119905 (11)
where 119906 is the added mass matrix of the floating body in thefrequency domain and 120596
0is random number
32 Numerical Solutions Ansys-AQWA is the commercialcomputational fluid dynamics software based on the govern-ing equations described in Section 31 All the calculations ofthe above equations are coupled in two modules for the finalanalysis AQWA-LINE deals with the applications of diffrac-tion and radiation theories for fluid structure interaction [17]The modules can also calculate the first- and second-orderwave forces on the floating structures and further responseIn addition AQWA-NAUT conducts the calculations forhydrodynamic parameters in the time domain under thespecific wave conditions [18] The module will call the addedmass radiation damping and diffraction force from AQWA-LINE during the computations The motion response of thefloating structures will be outputted after integrating effectsof hinges and anchor lines among bodies AQWA-NAUT alsorecalculates the Froude-Krylov force during every time stepconsidering influences of wet surface area variation on thenonlinear dynamics
All the structures and grids will be generated in AnsysMechanical APDL software and then transferred as theAQWA executive files In the present paper the scheme in thenumerical model is slightly simplified where the crane pilesare cancelled and the buoy is fixed on the guide rod withoutany relative motions Some corresponding parameters areshown in Figure 2(a) the water depth is fixed as 10mand the buoy diameter and height are 18m and 095mrespectively The taut lines linking the damping plate andthe seabed weights are called SWL and those linking theclump and seabed weights are defined as CWLThe diameter
of the damping plate is 119863 and the distance between twoseabed weights is 119878 The total weight of the floating facility isaround 8 ton For different shape parameters in the followingcalculating cases the height of clumpweight ℎ
119908 the height of
the guide rod between the damping plate and clump weightℎ
119866 and height of damping plate ℎ
119901 are adjusted which will
keep the system center of gravity 50mm below the top ofclump weight The center of buoyancy is kept at the center ofthe damping plate using the same methodThe net buoyancyis around 45sim98 kN It should be noted that two CWLs andtwin seabed weights will merge to be one line and one weightwhen 119878 = 0 The diameter of wire rope used as the taut line is14mm and its elasticity modulus is 206GPa Following theChinese code of wire ropes the allowed maximum tensileforce is 138 kN [19]
The grid structures in the numerical model are shownin Figure 2(b) the node number is up to 3074 Shell 181element is utilized to generate all the nonline structuresEach element has four nodes with 6 DOF which also candegenerate to the triangular elements Pipe 16 element whichhas two nodes is used for taut lines model setup The originof coordinates locates at the intersection of the center axisof the wave energy converter and still water surface Theorientations of 119909 119910 and 119911 axes follow the directions shownin Figure 2(b) In the software the wire rope extensions willbe conducted automatically at the start of analysis becauseof the equilibrium of resultant force at rest Based on themodulus of elasticity and several trials following the softwaremanuals wire ropes are all shortened to 95 of the requiredlengths considering taut effects as line pretensions which willmake system components get to the preset positions in thepreliminary design The incident wave period 119879 varies from30 s to 70 s 119867 = 05m is utilized as the operating waveheight 119867 = 14m is the extreme wave condition The timestep used in all the calculations is 005 s
33 Experimental Validation In order to validate the capabil-ity of the present numerical model on floating body motionunder wave excitation experimental data of the oscillatingmotion of the buoy are used for the validation The buoy isrestricted to move in one degree of freedom along the guiderod without any damping plates which is fixed to the tankbottom All the physical model tests were carried out in thewave tank of Shandong Provincial Key Laboratory of OceanEngineering Ocean University of China [20] Regular waveswith different conditions are employed in the experimentsAlthough the experimental contents are somehow differentfrom the WEC system in the present paper the validationof buoyrsquos 1D motions still could provide solid evidenceexplicitly on the capability of the numerical model on thehydrodynamic characteristics of floating bodies driven bywaves
Comparisons between the numerical and experimentalresults of the buoy heaving amplitudes are shown in Figure 3Numerical model slightly overpredicts all the results becauseof the ideal conditions and ignoring all nonlinear effectsMean error of the numerical predictions is 89 Goodagreements show that the numerical model could be applied
Mathematical Problems in Engineering 5
D
6000
300
2000
1000
800
3500
10000
SWL
CWL
S
Unit mm
(a) Parameters of WEC
Z
X
Y
Z
(b) Structure and grids in the numerical model (snapshot fromthe software)
Figure 2 Numerical model setup of WEC with mooring system
in the further investigation for wave-structure interactionanalysis It also should be pointed out that the mooringline dynamic mechanics are not verified here which can bereferred to the software manual and calculation examples[16ndash18]
4 Results and Discussion
For the mooring system of heaving type point absorberwave energy converter it is very important to keep thewhole facility in stationary state which will provide a betteroperating condition for the buoy to oscillate along the guiderod Hence the displacements in the six degrees of freedomwill be treated as the evaluating indexes in the present paperThe damping plate and the taut line system are designed andtested to reduce the movements in 6 DOF Time historiesof the mooring system displacements and tensile forces oftaut lines are demonstrated first Effects of damping platediameter taut line number and mooring types are thenstudied Based on the above investigation results tensionloads under the extreme wave conditions are calculated toverify the safety of wire ropes as taut lines
41 TimeHistoryDataAnalysis A typical case of themooringsystem is used for time domain results demonstration Theincident waves come from left side The diameter of damp
15 175 2 225 250
005
01
015
02
AQWA (H= 010m)EXP (H= 010m)
AQWA (H= 015m)EXP (H= 015m)
Buoy
mot
ion
ampl
itude
(m)
Period T (s)
Figure 3 Comparison between experimental and numerical heav-ing amplitudes of the buoy
plate is119863 = 50mTwo SWLs and twoCWLs are linked to thetwin seabed weights and the ratio 119878119863 = 10 The incident
6 Mathematical Problems in Engineering
Tran
slatio
n di
spla
cem
ent (
m)
tT
10 11 12 13 14 15 16minus006
minus004
minus002
0
002
004
006
Surge XSway Y
Heave Z
(a) Translation displacement
tT
10 11 12 13 14 15 16
Rota
tion
disp
lace
men
t (de
g)
minus1
minus05
0
05
1
PitchRollYaw
(b) Rotation displacement
tT
10 11 12 13 14 158
10
12
14
16
18
20
Tens
ion
(kN
)
CWL LCWL R
SWL LSWL R
(c) Tension forces on various taut lines
Figure 4 Time histories of mooring system motions and forces (119867 = 05m 119879 = 40 s119863 = 50m and 119878 = 50m 2 CWLs 2 SWLs)
wave height and period are 119867 = 05m and 119879 = 40 srespectively Time histories of translation and rotation dis-placements of the system center of gravity and tensile forceson taut lines are displayed in Figure 4 The data are derivedfrom the timing when initial incident wave effects disappear
It can be seen in Figure 4(a) that the translating motionvaries in the sinusoidal pattern under regular waves Theamplitudes reduce in order of surge heave and sway It canbe seen that the amplitudes of swaying motions are quitesmall and less than 20 times 10minus3m because of the wave incidentdirection Heaving and surging motions under incidentwave forces are dominated in the translation movementTheir peak-to-valley values are significantly smaller than thecriteria values For the rotation displacement in Figure 4(b)
rotations around three axes demonstrate the quasi-sinusoidaland resilient pattern All the amplitudes are less than 1 degreeThe rotating values in other calculated cases are also verysmall which indicates that rotation displacement does nothave to be treated as the control elements in the furtheranalysis for the mooring stability
The variations of tensions on four taut lines are illustratedin Figure 4(c) The positions of two pairs of taut lines in Fig-ure 2(a) are defined following the incident wave directionsThe patterns of four curves are all sinusoidal under regularwave conditions Phase differences of curves are decided bythe mooring system movements in 6 DOF Furthermoretension forces on two CWLs are evidently larger than that ofSWLs and should be used as the checking lines
Mathematical Problems in Engineering 7
3 4 5 6 70
05
1
15
D = 3mD= 4mD= 5m
Am
plitu
de o
f sur
geX
(m)
Period T (s)
(a) Surge119883
3 4 5 6 70
05
1
15
Am
plitu
de o
f hea
ve Z
(m)
D= 3mD= 4mD= 5m
Period T (s)
(b) Heave 119885
Figure 5 Effects of damping plate diameters on mooring system stability
42 Effects of Damping Plate Diameters Damping plate isused to compete against the motion caused by the incidentwaves in order to give the appropriate stability of themooringsystemThe diameter119863 varies as 30m 40m and 50m andthe height is fixed as 03m Only one CWL links the clumpweight and the single seabed weight Operating wave height119867 = 05m is used to deal with all five periods
Effects of damping plate diameters on mooring stabilityare shown in Figure 5 Surge motions are represented bythe maximum of surge offset values Maximums of troughto crest height values in every period express correspondingheave motions Data processing in the latter context as wellas Figures 6 and 7 also follows the same principle as aboveSway motions and rotation displacements are observed tobe very small under all calculated conditions and are notillustrated here No obvious regularities of diameter effectshave been found in the figures In Figure 5(a) the surgeamplitudes are mostly violent because the single verticalCWL is hard to restrain the horizontal motions On thecontrary in Figure 5(b) the 5m damping plate cooperatingwith the single CWL shows best performance to reduce themotions in the vertical direction Therefore 119863 = 5m ischosen to be the optimized diameter of the damping plateSince the surge amplitudes under the condition 119863 = 50mexceed the presupposed criterion diagonal taut lines shouldbe installed to prevent large horizontal movements
43 Effects of Taut Line System Considering the perfor-mance of single CWL on the mooring system stability twoCWLs are proposed with twin seabed weights The openinglevel of CWLs is represented by ratio 119878119863 varying from
0 to 10 Figure 6 illustrates effects of 119878119863 ratios on surgeand heave motions In Figure 6(a) it can be seen that thehorizontal moving amplitudes become smaller as 119878119863 ratioincreases The reducing range also decreases as 119878119863 becomesgreater Two peaks could be observed at 119879 = 40 s and 119879 =
60 s The surge amplitude is up to 065 at 119879 = 40 s when119878119863 ratio is zero and it satisfies the criterion when 119878119863
is larger than 04 The ratio 119878119863 = 10 shows the bestperformance to add the horizontal stability over the waveperiod range
In Figure 6(b) the heave motions do not show any obvi-ous distributing regularity according to 119878119863 ratio variationIt can be seen that most heaving values under small 119878119863ratios are less than 01m which fits the proposed mooringstability criterion in this paper As 119878119863 increases especially119878119863 = 10 most values over the period domain approachor exceed 01m which affects the surge motion oppositely Itis because larger 119878119863 ratios with greater opening angles willreduce the vertical tension under the same confined stress ofwire ropes
In order to deal with the paradoxical effects of 119878119863 =
10 on surge and heave motions two SWLs are added toreduce the vertical motions obtained with only CWLs InFigure 6(a) the coupled taut lines indeed show best per-formance on surge inhibitions and the amplitudes over theperiod domain decrease to less than 0025m On the otherhand effects on the heaving reduction are also evident andthe indicating values are all less than 005m Instead of settingadditional vertical CWL and weights the present designcould utilize two seabed weights at maximum extent tocontrol the costs
8 Mathematical Problems in Engineering
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
08
07
06
05
04
03
02
01
0
Period T (s)
(a) Surge119883
3 4 5 6 7
Am
plitu
de o
f hea
ve Z
(m)
04
03
02
01
0
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
Period T (s)
(b) Heave 119885
Figure 6 Effects of 119878119863 ratio on mooring system stability
44 Effects of Incident Wave Directions Since the layout oftaut lines is designed to be parallel to the incident wavedirection it is necessary to study the operating performanceof the mooring system under oblique waves Two angles areemployed as 45∘ and 90∘ in Figure 7(a) which are definedas included angles between incident wave directions and thelayout line of CWLs and SWLs119867 = 05m is still employed asthe operating wave height Figures 7(b) to 7(c) display effectsof incident wave directions on mooring system movementsin horizontal and vertical directions
In Figure 7(b) sway amplitudes become significantlygreater as expected when the incident angle increases Mostcalculated results under oblique waves exceed 02m for surgemotion A peak also can be found at 119879 = 50 s for both45∘ and 90∘ The maximum value is 088 which is over 4times higher than the criterion value For surge motions inFigure 7(c) the amplitudes under variouswave conditions areall less than 005m which will not affect the buoy operationobviously under oblique waves Although heave motions arenot increased as sharply as sways in Figure 7(d) their effectson the operating performance of oscillating buoys WEC aremore sensitiveTherefore it can be seen that current design ofmooring system cannot compete with oblique waves as wellas waves from the forward direction If at least two meandirections are employed in the design it can be imaginedthat cross arrangement of two sets of CWLs and SWLs willprovide a good performance to confront waves from variousdirections
45 Tension Analysis Tensile forces on the taut lines arecalculated under extreme wave conditions (119867 = 14m) withthree incident wave directions The mooring system is asfollows 2 SWLs and 2 CWLs 119878119863 = 10 The maximumvalues under each condition are extracted from time historiesof tension forces on all taut lines which occurs mostly onthe left CWL in Figure 2 The above values under variousincident directions are illustrated in Figure 8 It can be seenthat maximum tensions occur at 119879 = 40 s for all waveconditions and they decrease sharply as the wave periodincreases Although maximum tensions under all extremewave conditions do not exceed the allowed value of 138 kNthe tensile forces have approached this limit at 119879 = 40 swhich should be noted in the further design formore securityspace
5 Conclusions
A small oscillating wave energy converter has been designedfor electricity supply of nearshore ocean buoys The mooringsystem utilizes wire ropes as taut lines to connect thedamping plate and clump weight with seabed weights whichare investigated numerically to provide stationary state forheaving buoy operation Ansys-AQWAwas used to deal withthe potential flow waves and fluid structure interactions inthe time domain
It has been found that the damping plate could pro-vide a good station-keeping for the energy converting
Mathematical Problems in Engineering 9
CWL CWL
Y
X
O
0∘
45∘
90∘
(a) Incident angles of oblique waves
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(b) Surge119883
3 4 5 6 7
Am
plitu
de o
f sw
ay Y
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(c) Sway
3 4 5 6 7
1
08
06
04
02
0
Am
plitu
de o
f hea
ve Z
(m)
0∘
45∘
90∘
Period T (s)
(d) Heave 119885
Figure 7 Effects of incident wave direction on mooring system stability
compartment Under the current design parameters thediameter 119863 = 50m of the damping plate with single CWLshows best restraining results on the heaving motion of themooring facilities which also needs more support to controlthe surge Twin CWLs are then investigated and the ratio119878119863 = 10 can significantly reduce the surge motion andtwo added SWLs could help to reduce both surge and heaveamplitudes Oblique wave testing results suggest adding
the cross arrangement of CWLs and SWLs to deal with moreincident wave directions Calculated tensile forces on the tautlines demonstrate that the present design satisfies the allowedtension criterion
All the above results show that the mooring system uti-lized and optimized here is feasible and reliable In the futuremore detailed design is to be carried out for the prototypemachine manufacture Through rough calculations the costs
10 Mathematical Problems in Engineering
3 4 5 6 70
30
60
90
120
150
Tens
ion
(kN
)
0∘
45∘
90∘
Period T (s)
Figure 8 Tension forces on taut lines under extreme wave condi-tions
of the present mooring system are about 40 lower thanthose of the traditional 4 or 5 points mooring system Seatrials will be conducted in order to test the station-keepingcapability of the present mooring system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to the financial support provided byNational Natural Science Foundation of China (41376100)National High Technology Research and Development Pro-gram of China (863 Project 2012AA052601) Special Fundfor Ocean Renewable Energy of SOA (QDME2011GD02)Shandong Natural Science Funds for Distinguished YoungScholar (JQ201314) Qingdao Municipal Science amp Technol-ogy Program (13-4-1-38-hy) and the Program of IntroducingTalents of Discipline to Universities (111 Project B14028)
References
[1] E B Agamloh A KWallace and A von Jouanne ldquoApplicationof fluidndashstructure interaction simulation of an ocean waveenergy extraction devicerdquo Renewable Energy vol 33 no 4 pp748ndash757 2008
[2] Y-H Yu and Y Li ldquoReynolds-Averaged Navier-Stokes simula-tion of the heave performance of a two-body floating-pointabsorber wave energy systemrdquo Computers amp Fluids vol 73 pp104ndash114 2013
[3] A Umar and T K Datta ldquoNonlinear response of a mooredbuoyrdquo Ocean Engineering vol 30 no 13 pp 1625ndash1646 2003
[4] R Guanche V Gomez C Vidal and I Eguinoa ldquoNumericalanalysis and performance optimization of a submerged waveenergy point absorberrdquoOcean Engineering vol 59 pp 214ndash2302013
[5] Z-M Yuan A Incecik and C Y Ji ldquoNumerical study on ahybrid mooring system with clump weights and buoysrdquo OceanEngineering vol 88 pp 1ndash11 2014
[6] G Benassai A Campanile V Piscopo and A ScamardellaldquoMooring control of semi-submersible structures for windturbinesrdquo Procedia Engineering vol 70 pp 132ndash141 2014
[7] V Harnois S D Weller L Johanning et al ldquoNumerical modelvalidation for mooring systems method and application forwave energy convertersrdquoRenewable Energy vol 75 pp 869ndash8872015
[8] E E Bachynski Y L Young and R W Yeung ldquoAnalysis andoptimization of a tethered wave energy converter in irregularwavesrdquo Renewable Energy vol 48 pp 133ndash145 2012
[9] V Krivtsov and B Linfoot ldquoDisruption to benthic habitats bymoorings of wave energy installations a modelling case studyand implications for overall ecosystem functioningrdquo EcologicalModelling vol 245 pp 121ndash124 2012
[10] P C Vicente A F D O Falcao L M C Gato and P A PJustino ldquoDynamics of arrays of floating point-absorber waveenergy converters with inter-body and bottom slack-mooringconnectionsrdquoAppliedOcean Research vol 31 no 4 pp 267ndash2812009
[11] E Vijayakrishna Rapaka R Natarajan and S NeelamanildquoExperimental investigation on the dynamic response of amoored wave energy device under regular sea wavesrdquo OceanEngineering vol 31 no 5-6 pp 725ndash743 2004
[12] C Ji and Z Yuan ldquoExperimental study of a hybrid mooringsystemrdquo Journal of Marine Science and Technology vol 20 no2 pp 213ndash225 2015
[13] S Ambuhl M Sterndorff and J D Soslashrensen ldquoExtrapolationof extreme response for different mooring line systems of float-ing wave energy convertersrdquo International Journal of MarineEnergy vol 7 pp 1ndash19 2014
[14] J Fitzgerald and L Bergdahl ldquoIncluding moorings in theassessment of a generic offshore wave energy converter afrequency domain approachrdquo Marine Structures vol 21 no 1pp 23ndash46 2008
[15] P R Thies L Johanning V Harnois H C M Smith and DN Parish ldquoMooring line fatigue damage evaluation for floatingmarine energy converters field measurements and predictionrdquoRenewable Energy vol 63 pp 133ndash144 2014
[16] AnsysAQWATheoryManual Release 150 Ansys CanonsburgPa USA 2013
[17] Ansys AQWA-LINE Manual Release 145 Ansys CanonsburgPa USA 2012
[18] Ansys Inc AQWA-NAUT Manual Release 145 2012[19] Standardization Administration of Peoplersquos Republic of China
National Code of PRC Steel Wire Ropes for Important Pur-poses GB8918-2006 StandardizationAdministration of PeoplersquosRepublic of China 2006
[20] Q Na Study on hydrodynamic performance of oscillating buoyWEC considering power take-off system [MS thesis] OceanUniversity of China Qingdao China 2015 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
D
6000
300
2000
1000
800
3500
10000
SWL
CWL
S
Unit mm
(a) Parameters of WEC
Z
X
Y
Z
(b) Structure and grids in the numerical model (snapshot fromthe software)
Figure 2 Numerical model setup of WEC with mooring system
in the further investigation for wave-structure interactionanalysis It also should be pointed out that the mooringline dynamic mechanics are not verified here which can bereferred to the software manual and calculation examples[16ndash18]
4 Results and Discussion
For the mooring system of heaving type point absorberwave energy converter it is very important to keep thewhole facility in stationary state which will provide a betteroperating condition for the buoy to oscillate along the guiderod Hence the displacements in the six degrees of freedomwill be treated as the evaluating indexes in the present paperThe damping plate and the taut line system are designed andtested to reduce the movements in 6 DOF Time historiesof the mooring system displacements and tensile forces oftaut lines are demonstrated first Effects of damping platediameter taut line number and mooring types are thenstudied Based on the above investigation results tensionloads under the extreme wave conditions are calculated toverify the safety of wire ropes as taut lines
41 TimeHistoryDataAnalysis A typical case of themooringsystem is used for time domain results demonstration Theincident waves come from left side The diameter of damp
15 175 2 225 250
005
01
015
02
AQWA (H= 010m)EXP (H= 010m)
AQWA (H= 015m)EXP (H= 015m)
Buoy
mot
ion
ampl
itude
(m)
Period T (s)
Figure 3 Comparison between experimental and numerical heav-ing amplitudes of the buoy
plate is119863 = 50mTwo SWLs and twoCWLs are linked to thetwin seabed weights and the ratio 119878119863 = 10 The incident
6 Mathematical Problems in Engineering
Tran
slatio
n di
spla
cem
ent (
m)
tT
10 11 12 13 14 15 16minus006
minus004
minus002
0
002
004
006
Surge XSway Y
Heave Z
(a) Translation displacement
tT
10 11 12 13 14 15 16
Rota
tion
disp
lace
men
t (de
g)
minus1
minus05
0
05
1
PitchRollYaw
(b) Rotation displacement
tT
10 11 12 13 14 158
10
12
14
16
18
20
Tens
ion
(kN
)
CWL LCWL R
SWL LSWL R
(c) Tension forces on various taut lines
Figure 4 Time histories of mooring system motions and forces (119867 = 05m 119879 = 40 s119863 = 50m and 119878 = 50m 2 CWLs 2 SWLs)
wave height and period are 119867 = 05m and 119879 = 40 srespectively Time histories of translation and rotation dis-placements of the system center of gravity and tensile forceson taut lines are displayed in Figure 4 The data are derivedfrom the timing when initial incident wave effects disappear
It can be seen in Figure 4(a) that the translating motionvaries in the sinusoidal pattern under regular waves Theamplitudes reduce in order of surge heave and sway It canbe seen that the amplitudes of swaying motions are quitesmall and less than 20 times 10minus3m because of the wave incidentdirection Heaving and surging motions under incidentwave forces are dominated in the translation movementTheir peak-to-valley values are significantly smaller than thecriteria values For the rotation displacement in Figure 4(b)
rotations around three axes demonstrate the quasi-sinusoidaland resilient pattern All the amplitudes are less than 1 degreeThe rotating values in other calculated cases are also verysmall which indicates that rotation displacement does nothave to be treated as the control elements in the furtheranalysis for the mooring stability
The variations of tensions on four taut lines are illustratedin Figure 4(c) The positions of two pairs of taut lines in Fig-ure 2(a) are defined following the incident wave directionsThe patterns of four curves are all sinusoidal under regularwave conditions Phase differences of curves are decided bythe mooring system movements in 6 DOF Furthermoretension forces on two CWLs are evidently larger than that ofSWLs and should be used as the checking lines
Mathematical Problems in Engineering 7
3 4 5 6 70
05
1
15
D = 3mD= 4mD= 5m
Am
plitu
de o
f sur
geX
(m)
Period T (s)
(a) Surge119883
3 4 5 6 70
05
1
15
Am
plitu
de o
f hea
ve Z
(m)
D= 3mD= 4mD= 5m
Period T (s)
(b) Heave 119885
Figure 5 Effects of damping plate diameters on mooring system stability
42 Effects of Damping Plate Diameters Damping plate isused to compete against the motion caused by the incidentwaves in order to give the appropriate stability of themooringsystemThe diameter119863 varies as 30m 40m and 50m andthe height is fixed as 03m Only one CWL links the clumpweight and the single seabed weight Operating wave height119867 = 05m is used to deal with all five periods
Effects of damping plate diameters on mooring stabilityare shown in Figure 5 Surge motions are represented bythe maximum of surge offset values Maximums of troughto crest height values in every period express correspondingheave motions Data processing in the latter context as wellas Figures 6 and 7 also follows the same principle as aboveSway motions and rotation displacements are observed tobe very small under all calculated conditions and are notillustrated here No obvious regularities of diameter effectshave been found in the figures In Figure 5(a) the surgeamplitudes are mostly violent because the single verticalCWL is hard to restrain the horizontal motions On thecontrary in Figure 5(b) the 5m damping plate cooperatingwith the single CWL shows best performance to reduce themotions in the vertical direction Therefore 119863 = 5m ischosen to be the optimized diameter of the damping plateSince the surge amplitudes under the condition 119863 = 50mexceed the presupposed criterion diagonal taut lines shouldbe installed to prevent large horizontal movements
43 Effects of Taut Line System Considering the perfor-mance of single CWL on the mooring system stability twoCWLs are proposed with twin seabed weights The openinglevel of CWLs is represented by ratio 119878119863 varying from
0 to 10 Figure 6 illustrates effects of 119878119863 ratios on surgeand heave motions In Figure 6(a) it can be seen that thehorizontal moving amplitudes become smaller as 119878119863 ratioincreases The reducing range also decreases as 119878119863 becomesgreater Two peaks could be observed at 119879 = 40 s and 119879 =
60 s The surge amplitude is up to 065 at 119879 = 40 s when119878119863 ratio is zero and it satisfies the criterion when 119878119863
is larger than 04 The ratio 119878119863 = 10 shows the bestperformance to add the horizontal stability over the waveperiod range
In Figure 6(b) the heave motions do not show any obvi-ous distributing regularity according to 119878119863 ratio variationIt can be seen that most heaving values under small 119878119863ratios are less than 01m which fits the proposed mooringstability criterion in this paper As 119878119863 increases especially119878119863 = 10 most values over the period domain approachor exceed 01m which affects the surge motion oppositely Itis because larger 119878119863 ratios with greater opening angles willreduce the vertical tension under the same confined stress ofwire ropes
In order to deal with the paradoxical effects of 119878119863 =
10 on surge and heave motions two SWLs are added toreduce the vertical motions obtained with only CWLs InFigure 6(a) the coupled taut lines indeed show best per-formance on surge inhibitions and the amplitudes over theperiod domain decrease to less than 0025m On the otherhand effects on the heaving reduction are also evident andthe indicating values are all less than 005m Instead of settingadditional vertical CWL and weights the present designcould utilize two seabed weights at maximum extent tocontrol the costs
8 Mathematical Problems in Engineering
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
08
07
06
05
04
03
02
01
0
Period T (s)
(a) Surge119883
3 4 5 6 7
Am
plitu
de o
f hea
ve Z
(m)
04
03
02
01
0
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
Period T (s)
(b) Heave 119885
Figure 6 Effects of 119878119863 ratio on mooring system stability
44 Effects of Incident Wave Directions Since the layout oftaut lines is designed to be parallel to the incident wavedirection it is necessary to study the operating performanceof the mooring system under oblique waves Two angles areemployed as 45∘ and 90∘ in Figure 7(a) which are definedas included angles between incident wave directions and thelayout line of CWLs and SWLs119867 = 05m is still employed asthe operating wave height Figures 7(b) to 7(c) display effectsof incident wave directions on mooring system movementsin horizontal and vertical directions
In Figure 7(b) sway amplitudes become significantlygreater as expected when the incident angle increases Mostcalculated results under oblique waves exceed 02m for surgemotion A peak also can be found at 119879 = 50 s for both45∘ and 90∘ The maximum value is 088 which is over 4times higher than the criterion value For surge motions inFigure 7(c) the amplitudes under variouswave conditions areall less than 005m which will not affect the buoy operationobviously under oblique waves Although heave motions arenot increased as sharply as sways in Figure 7(d) their effectson the operating performance of oscillating buoys WEC aremore sensitiveTherefore it can be seen that current design ofmooring system cannot compete with oblique waves as wellas waves from the forward direction If at least two meandirections are employed in the design it can be imaginedthat cross arrangement of two sets of CWLs and SWLs willprovide a good performance to confront waves from variousdirections
45 Tension Analysis Tensile forces on the taut lines arecalculated under extreme wave conditions (119867 = 14m) withthree incident wave directions The mooring system is asfollows 2 SWLs and 2 CWLs 119878119863 = 10 The maximumvalues under each condition are extracted from time historiesof tension forces on all taut lines which occurs mostly onthe left CWL in Figure 2 The above values under variousincident directions are illustrated in Figure 8 It can be seenthat maximum tensions occur at 119879 = 40 s for all waveconditions and they decrease sharply as the wave periodincreases Although maximum tensions under all extremewave conditions do not exceed the allowed value of 138 kNthe tensile forces have approached this limit at 119879 = 40 swhich should be noted in the further design formore securityspace
5 Conclusions
A small oscillating wave energy converter has been designedfor electricity supply of nearshore ocean buoys The mooringsystem utilizes wire ropes as taut lines to connect thedamping plate and clump weight with seabed weights whichare investigated numerically to provide stationary state forheaving buoy operation Ansys-AQWAwas used to deal withthe potential flow waves and fluid structure interactions inthe time domain
It has been found that the damping plate could pro-vide a good station-keeping for the energy converting
Mathematical Problems in Engineering 9
CWL CWL
Y
X
O
0∘
45∘
90∘
(a) Incident angles of oblique waves
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(b) Surge119883
3 4 5 6 7
Am
plitu
de o
f sw
ay Y
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(c) Sway
3 4 5 6 7
1
08
06
04
02
0
Am
plitu
de o
f hea
ve Z
(m)
0∘
45∘
90∘
Period T (s)
(d) Heave 119885
Figure 7 Effects of incident wave direction on mooring system stability
compartment Under the current design parameters thediameter 119863 = 50m of the damping plate with single CWLshows best restraining results on the heaving motion of themooring facilities which also needs more support to controlthe surge Twin CWLs are then investigated and the ratio119878119863 = 10 can significantly reduce the surge motion andtwo added SWLs could help to reduce both surge and heaveamplitudes Oblique wave testing results suggest adding
the cross arrangement of CWLs and SWLs to deal with moreincident wave directions Calculated tensile forces on the tautlines demonstrate that the present design satisfies the allowedtension criterion
All the above results show that the mooring system uti-lized and optimized here is feasible and reliable In the futuremore detailed design is to be carried out for the prototypemachine manufacture Through rough calculations the costs
10 Mathematical Problems in Engineering
3 4 5 6 70
30
60
90
120
150
Tens
ion
(kN
)
0∘
45∘
90∘
Period T (s)
Figure 8 Tension forces on taut lines under extreme wave condi-tions
of the present mooring system are about 40 lower thanthose of the traditional 4 or 5 points mooring system Seatrials will be conducted in order to test the station-keepingcapability of the present mooring system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to the financial support provided byNational Natural Science Foundation of China (41376100)National High Technology Research and Development Pro-gram of China (863 Project 2012AA052601) Special Fundfor Ocean Renewable Energy of SOA (QDME2011GD02)Shandong Natural Science Funds for Distinguished YoungScholar (JQ201314) Qingdao Municipal Science amp Technol-ogy Program (13-4-1-38-hy) and the Program of IntroducingTalents of Discipline to Universities (111 Project B14028)
References
[1] E B Agamloh A KWallace and A von Jouanne ldquoApplicationof fluidndashstructure interaction simulation of an ocean waveenergy extraction devicerdquo Renewable Energy vol 33 no 4 pp748ndash757 2008
[2] Y-H Yu and Y Li ldquoReynolds-Averaged Navier-Stokes simula-tion of the heave performance of a two-body floating-pointabsorber wave energy systemrdquo Computers amp Fluids vol 73 pp104ndash114 2013
[3] A Umar and T K Datta ldquoNonlinear response of a mooredbuoyrdquo Ocean Engineering vol 30 no 13 pp 1625ndash1646 2003
[4] R Guanche V Gomez C Vidal and I Eguinoa ldquoNumericalanalysis and performance optimization of a submerged waveenergy point absorberrdquoOcean Engineering vol 59 pp 214ndash2302013
[5] Z-M Yuan A Incecik and C Y Ji ldquoNumerical study on ahybrid mooring system with clump weights and buoysrdquo OceanEngineering vol 88 pp 1ndash11 2014
[6] G Benassai A Campanile V Piscopo and A ScamardellaldquoMooring control of semi-submersible structures for windturbinesrdquo Procedia Engineering vol 70 pp 132ndash141 2014
[7] V Harnois S D Weller L Johanning et al ldquoNumerical modelvalidation for mooring systems method and application forwave energy convertersrdquoRenewable Energy vol 75 pp 869ndash8872015
[8] E E Bachynski Y L Young and R W Yeung ldquoAnalysis andoptimization of a tethered wave energy converter in irregularwavesrdquo Renewable Energy vol 48 pp 133ndash145 2012
[9] V Krivtsov and B Linfoot ldquoDisruption to benthic habitats bymoorings of wave energy installations a modelling case studyand implications for overall ecosystem functioningrdquo EcologicalModelling vol 245 pp 121ndash124 2012
[10] P C Vicente A F D O Falcao L M C Gato and P A PJustino ldquoDynamics of arrays of floating point-absorber waveenergy converters with inter-body and bottom slack-mooringconnectionsrdquoAppliedOcean Research vol 31 no 4 pp 267ndash2812009
[11] E Vijayakrishna Rapaka R Natarajan and S NeelamanildquoExperimental investigation on the dynamic response of amoored wave energy device under regular sea wavesrdquo OceanEngineering vol 31 no 5-6 pp 725ndash743 2004
[12] C Ji and Z Yuan ldquoExperimental study of a hybrid mooringsystemrdquo Journal of Marine Science and Technology vol 20 no2 pp 213ndash225 2015
[13] S Ambuhl M Sterndorff and J D Soslashrensen ldquoExtrapolationof extreme response for different mooring line systems of float-ing wave energy convertersrdquo International Journal of MarineEnergy vol 7 pp 1ndash19 2014
[14] J Fitzgerald and L Bergdahl ldquoIncluding moorings in theassessment of a generic offshore wave energy converter afrequency domain approachrdquo Marine Structures vol 21 no 1pp 23ndash46 2008
[15] P R Thies L Johanning V Harnois H C M Smith and DN Parish ldquoMooring line fatigue damage evaluation for floatingmarine energy converters field measurements and predictionrdquoRenewable Energy vol 63 pp 133ndash144 2014
[16] AnsysAQWATheoryManual Release 150 Ansys CanonsburgPa USA 2013
[17] Ansys AQWA-LINE Manual Release 145 Ansys CanonsburgPa USA 2012
[18] Ansys Inc AQWA-NAUT Manual Release 145 2012[19] Standardization Administration of Peoplersquos Republic of China
National Code of PRC Steel Wire Ropes for Important Pur-poses GB8918-2006 StandardizationAdministration of PeoplersquosRepublic of China 2006
[20] Q Na Study on hydrodynamic performance of oscillating buoyWEC considering power take-off system [MS thesis] OceanUniversity of China Qingdao China 2015 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
Tran
slatio
n di
spla
cem
ent (
m)
tT
10 11 12 13 14 15 16minus006
minus004
minus002
0
002
004
006
Surge XSway Y
Heave Z
(a) Translation displacement
tT
10 11 12 13 14 15 16
Rota
tion
disp
lace
men
t (de
g)
minus1
minus05
0
05
1
PitchRollYaw
(b) Rotation displacement
tT
10 11 12 13 14 158
10
12
14
16
18
20
Tens
ion
(kN
)
CWL LCWL R
SWL LSWL R
(c) Tension forces on various taut lines
Figure 4 Time histories of mooring system motions and forces (119867 = 05m 119879 = 40 s119863 = 50m and 119878 = 50m 2 CWLs 2 SWLs)
wave height and period are 119867 = 05m and 119879 = 40 srespectively Time histories of translation and rotation dis-placements of the system center of gravity and tensile forceson taut lines are displayed in Figure 4 The data are derivedfrom the timing when initial incident wave effects disappear
It can be seen in Figure 4(a) that the translating motionvaries in the sinusoidal pattern under regular waves Theamplitudes reduce in order of surge heave and sway It canbe seen that the amplitudes of swaying motions are quitesmall and less than 20 times 10minus3m because of the wave incidentdirection Heaving and surging motions under incidentwave forces are dominated in the translation movementTheir peak-to-valley values are significantly smaller than thecriteria values For the rotation displacement in Figure 4(b)
rotations around three axes demonstrate the quasi-sinusoidaland resilient pattern All the amplitudes are less than 1 degreeThe rotating values in other calculated cases are also verysmall which indicates that rotation displacement does nothave to be treated as the control elements in the furtheranalysis for the mooring stability
The variations of tensions on four taut lines are illustratedin Figure 4(c) The positions of two pairs of taut lines in Fig-ure 2(a) are defined following the incident wave directionsThe patterns of four curves are all sinusoidal under regularwave conditions Phase differences of curves are decided bythe mooring system movements in 6 DOF Furthermoretension forces on two CWLs are evidently larger than that ofSWLs and should be used as the checking lines
Mathematical Problems in Engineering 7
3 4 5 6 70
05
1
15
D = 3mD= 4mD= 5m
Am
plitu
de o
f sur
geX
(m)
Period T (s)
(a) Surge119883
3 4 5 6 70
05
1
15
Am
plitu
de o
f hea
ve Z
(m)
D= 3mD= 4mD= 5m
Period T (s)
(b) Heave 119885
Figure 5 Effects of damping plate diameters on mooring system stability
42 Effects of Damping Plate Diameters Damping plate isused to compete against the motion caused by the incidentwaves in order to give the appropriate stability of themooringsystemThe diameter119863 varies as 30m 40m and 50m andthe height is fixed as 03m Only one CWL links the clumpweight and the single seabed weight Operating wave height119867 = 05m is used to deal with all five periods
Effects of damping plate diameters on mooring stabilityare shown in Figure 5 Surge motions are represented bythe maximum of surge offset values Maximums of troughto crest height values in every period express correspondingheave motions Data processing in the latter context as wellas Figures 6 and 7 also follows the same principle as aboveSway motions and rotation displacements are observed tobe very small under all calculated conditions and are notillustrated here No obvious regularities of diameter effectshave been found in the figures In Figure 5(a) the surgeamplitudes are mostly violent because the single verticalCWL is hard to restrain the horizontal motions On thecontrary in Figure 5(b) the 5m damping plate cooperatingwith the single CWL shows best performance to reduce themotions in the vertical direction Therefore 119863 = 5m ischosen to be the optimized diameter of the damping plateSince the surge amplitudes under the condition 119863 = 50mexceed the presupposed criterion diagonal taut lines shouldbe installed to prevent large horizontal movements
43 Effects of Taut Line System Considering the perfor-mance of single CWL on the mooring system stability twoCWLs are proposed with twin seabed weights The openinglevel of CWLs is represented by ratio 119878119863 varying from
0 to 10 Figure 6 illustrates effects of 119878119863 ratios on surgeand heave motions In Figure 6(a) it can be seen that thehorizontal moving amplitudes become smaller as 119878119863 ratioincreases The reducing range also decreases as 119878119863 becomesgreater Two peaks could be observed at 119879 = 40 s and 119879 =
60 s The surge amplitude is up to 065 at 119879 = 40 s when119878119863 ratio is zero and it satisfies the criterion when 119878119863
is larger than 04 The ratio 119878119863 = 10 shows the bestperformance to add the horizontal stability over the waveperiod range
In Figure 6(b) the heave motions do not show any obvi-ous distributing regularity according to 119878119863 ratio variationIt can be seen that most heaving values under small 119878119863ratios are less than 01m which fits the proposed mooringstability criterion in this paper As 119878119863 increases especially119878119863 = 10 most values over the period domain approachor exceed 01m which affects the surge motion oppositely Itis because larger 119878119863 ratios with greater opening angles willreduce the vertical tension under the same confined stress ofwire ropes
In order to deal with the paradoxical effects of 119878119863 =
10 on surge and heave motions two SWLs are added toreduce the vertical motions obtained with only CWLs InFigure 6(a) the coupled taut lines indeed show best per-formance on surge inhibitions and the amplitudes over theperiod domain decrease to less than 0025m On the otherhand effects on the heaving reduction are also evident andthe indicating values are all less than 005m Instead of settingadditional vertical CWL and weights the present designcould utilize two seabed weights at maximum extent tocontrol the costs
8 Mathematical Problems in Engineering
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
08
07
06
05
04
03
02
01
0
Period T (s)
(a) Surge119883
3 4 5 6 7
Am
plitu
de o
f hea
ve Z
(m)
04
03
02
01
0
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
Period T (s)
(b) Heave 119885
Figure 6 Effects of 119878119863 ratio on mooring system stability
44 Effects of Incident Wave Directions Since the layout oftaut lines is designed to be parallel to the incident wavedirection it is necessary to study the operating performanceof the mooring system under oblique waves Two angles areemployed as 45∘ and 90∘ in Figure 7(a) which are definedas included angles between incident wave directions and thelayout line of CWLs and SWLs119867 = 05m is still employed asthe operating wave height Figures 7(b) to 7(c) display effectsof incident wave directions on mooring system movementsin horizontal and vertical directions
In Figure 7(b) sway amplitudes become significantlygreater as expected when the incident angle increases Mostcalculated results under oblique waves exceed 02m for surgemotion A peak also can be found at 119879 = 50 s for both45∘ and 90∘ The maximum value is 088 which is over 4times higher than the criterion value For surge motions inFigure 7(c) the amplitudes under variouswave conditions areall less than 005m which will not affect the buoy operationobviously under oblique waves Although heave motions arenot increased as sharply as sways in Figure 7(d) their effectson the operating performance of oscillating buoys WEC aremore sensitiveTherefore it can be seen that current design ofmooring system cannot compete with oblique waves as wellas waves from the forward direction If at least two meandirections are employed in the design it can be imaginedthat cross arrangement of two sets of CWLs and SWLs willprovide a good performance to confront waves from variousdirections
45 Tension Analysis Tensile forces on the taut lines arecalculated under extreme wave conditions (119867 = 14m) withthree incident wave directions The mooring system is asfollows 2 SWLs and 2 CWLs 119878119863 = 10 The maximumvalues under each condition are extracted from time historiesof tension forces on all taut lines which occurs mostly onthe left CWL in Figure 2 The above values under variousincident directions are illustrated in Figure 8 It can be seenthat maximum tensions occur at 119879 = 40 s for all waveconditions and they decrease sharply as the wave periodincreases Although maximum tensions under all extremewave conditions do not exceed the allowed value of 138 kNthe tensile forces have approached this limit at 119879 = 40 swhich should be noted in the further design formore securityspace
5 Conclusions
A small oscillating wave energy converter has been designedfor electricity supply of nearshore ocean buoys The mooringsystem utilizes wire ropes as taut lines to connect thedamping plate and clump weight with seabed weights whichare investigated numerically to provide stationary state forheaving buoy operation Ansys-AQWAwas used to deal withthe potential flow waves and fluid structure interactions inthe time domain
It has been found that the damping plate could pro-vide a good station-keeping for the energy converting
Mathematical Problems in Engineering 9
CWL CWL
Y
X
O
0∘
45∘
90∘
(a) Incident angles of oblique waves
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(b) Surge119883
3 4 5 6 7
Am
plitu
de o
f sw
ay Y
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(c) Sway
3 4 5 6 7
1
08
06
04
02
0
Am
plitu
de o
f hea
ve Z
(m)
0∘
45∘
90∘
Period T (s)
(d) Heave 119885
Figure 7 Effects of incident wave direction on mooring system stability
compartment Under the current design parameters thediameter 119863 = 50m of the damping plate with single CWLshows best restraining results on the heaving motion of themooring facilities which also needs more support to controlthe surge Twin CWLs are then investigated and the ratio119878119863 = 10 can significantly reduce the surge motion andtwo added SWLs could help to reduce both surge and heaveamplitudes Oblique wave testing results suggest adding
the cross arrangement of CWLs and SWLs to deal with moreincident wave directions Calculated tensile forces on the tautlines demonstrate that the present design satisfies the allowedtension criterion
All the above results show that the mooring system uti-lized and optimized here is feasible and reliable In the futuremore detailed design is to be carried out for the prototypemachine manufacture Through rough calculations the costs
10 Mathematical Problems in Engineering
3 4 5 6 70
30
60
90
120
150
Tens
ion
(kN
)
0∘
45∘
90∘
Period T (s)
Figure 8 Tension forces on taut lines under extreme wave condi-tions
of the present mooring system are about 40 lower thanthose of the traditional 4 or 5 points mooring system Seatrials will be conducted in order to test the station-keepingcapability of the present mooring system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to the financial support provided byNational Natural Science Foundation of China (41376100)National High Technology Research and Development Pro-gram of China (863 Project 2012AA052601) Special Fundfor Ocean Renewable Energy of SOA (QDME2011GD02)Shandong Natural Science Funds for Distinguished YoungScholar (JQ201314) Qingdao Municipal Science amp Technol-ogy Program (13-4-1-38-hy) and the Program of IntroducingTalents of Discipline to Universities (111 Project B14028)
References
[1] E B Agamloh A KWallace and A von Jouanne ldquoApplicationof fluidndashstructure interaction simulation of an ocean waveenergy extraction devicerdquo Renewable Energy vol 33 no 4 pp748ndash757 2008
[2] Y-H Yu and Y Li ldquoReynolds-Averaged Navier-Stokes simula-tion of the heave performance of a two-body floating-pointabsorber wave energy systemrdquo Computers amp Fluids vol 73 pp104ndash114 2013
[3] A Umar and T K Datta ldquoNonlinear response of a mooredbuoyrdquo Ocean Engineering vol 30 no 13 pp 1625ndash1646 2003
[4] R Guanche V Gomez C Vidal and I Eguinoa ldquoNumericalanalysis and performance optimization of a submerged waveenergy point absorberrdquoOcean Engineering vol 59 pp 214ndash2302013
[5] Z-M Yuan A Incecik and C Y Ji ldquoNumerical study on ahybrid mooring system with clump weights and buoysrdquo OceanEngineering vol 88 pp 1ndash11 2014
[6] G Benassai A Campanile V Piscopo and A ScamardellaldquoMooring control of semi-submersible structures for windturbinesrdquo Procedia Engineering vol 70 pp 132ndash141 2014
[7] V Harnois S D Weller L Johanning et al ldquoNumerical modelvalidation for mooring systems method and application forwave energy convertersrdquoRenewable Energy vol 75 pp 869ndash8872015
[8] E E Bachynski Y L Young and R W Yeung ldquoAnalysis andoptimization of a tethered wave energy converter in irregularwavesrdquo Renewable Energy vol 48 pp 133ndash145 2012
[9] V Krivtsov and B Linfoot ldquoDisruption to benthic habitats bymoorings of wave energy installations a modelling case studyand implications for overall ecosystem functioningrdquo EcologicalModelling vol 245 pp 121ndash124 2012
[10] P C Vicente A F D O Falcao L M C Gato and P A PJustino ldquoDynamics of arrays of floating point-absorber waveenergy converters with inter-body and bottom slack-mooringconnectionsrdquoAppliedOcean Research vol 31 no 4 pp 267ndash2812009
[11] E Vijayakrishna Rapaka R Natarajan and S NeelamanildquoExperimental investigation on the dynamic response of amoored wave energy device under regular sea wavesrdquo OceanEngineering vol 31 no 5-6 pp 725ndash743 2004
[12] C Ji and Z Yuan ldquoExperimental study of a hybrid mooringsystemrdquo Journal of Marine Science and Technology vol 20 no2 pp 213ndash225 2015
[13] S Ambuhl M Sterndorff and J D Soslashrensen ldquoExtrapolationof extreme response for different mooring line systems of float-ing wave energy convertersrdquo International Journal of MarineEnergy vol 7 pp 1ndash19 2014
[14] J Fitzgerald and L Bergdahl ldquoIncluding moorings in theassessment of a generic offshore wave energy converter afrequency domain approachrdquo Marine Structures vol 21 no 1pp 23ndash46 2008
[15] P R Thies L Johanning V Harnois H C M Smith and DN Parish ldquoMooring line fatigue damage evaluation for floatingmarine energy converters field measurements and predictionrdquoRenewable Energy vol 63 pp 133ndash144 2014
[16] AnsysAQWATheoryManual Release 150 Ansys CanonsburgPa USA 2013
[17] Ansys AQWA-LINE Manual Release 145 Ansys CanonsburgPa USA 2012
[18] Ansys Inc AQWA-NAUT Manual Release 145 2012[19] Standardization Administration of Peoplersquos Republic of China
National Code of PRC Steel Wire Ropes for Important Pur-poses GB8918-2006 StandardizationAdministration of PeoplersquosRepublic of China 2006
[20] Q Na Study on hydrodynamic performance of oscillating buoyWEC considering power take-off system [MS thesis] OceanUniversity of China Qingdao China 2015 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
3 4 5 6 70
05
1
15
D = 3mD= 4mD= 5m
Am
plitu
de o
f sur
geX
(m)
Period T (s)
(a) Surge119883
3 4 5 6 70
05
1
15
Am
plitu
de o
f hea
ve Z
(m)
D= 3mD= 4mD= 5m
Period T (s)
(b) Heave 119885
Figure 5 Effects of damping plate diameters on mooring system stability
42 Effects of Damping Plate Diameters Damping plate isused to compete against the motion caused by the incidentwaves in order to give the appropriate stability of themooringsystemThe diameter119863 varies as 30m 40m and 50m andthe height is fixed as 03m Only one CWL links the clumpweight and the single seabed weight Operating wave height119867 = 05m is used to deal with all five periods
Effects of damping plate diameters on mooring stabilityare shown in Figure 5 Surge motions are represented bythe maximum of surge offset values Maximums of troughto crest height values in every period express correspondingheave motions Data processing in the latter context as wellas Figures 6 and 7 also follows the same principle as aboveSway motions and rotation displacements are observed tobe very small under all calculated conditions and are notillustrated here No obvious regularities of diameter effectshave been found in the figures In Figure 5(a) the surgeamplitudes are mostly violent because the single verticalCWL is hard to restrain the horizontal motions On thecontrary in Figure 5(b) the 5m damping plate cooperatingwith the single CWL shows best performance to reduce themotions in the vertical direction Therefore 119863 = 5m ischosen to be the optimized diameter of the damping plateSince the surge amplitudes under the condition 119863 = 50mexceed the presupposed criterion diagonal taut lines shouldbe installed to prevent large horizontal movements
43 Effects of Taut Line System Considering the perfor-mance of single CWL on the mooring system stability twoCWLs are proposed with twin seabed weights The openinglevel of CWLs is represented by ratio 119878119863 varying from
0 to 10 Figure 6 illustrates effects of 119878119863 ratios on surgeand heave motions In Figure 6(a) it can be seen that thehorizontal moving amplitudes become smaller as 119878119863 ratioincreases The reducing range also decreases as 119878119863 becomesgreater Two peaks could be observed at 119879 = 40 s and 119879 =
60 s The surge amplitude is up to 065 at 119879 = 40 s when119878119863 ratio is zero and it satisfies the criterion when 119878119863
is larger than 04 The ratio 119878119863 = 10 shows the bestperformance to add the horizontal stability over the waveperiod range
In Figure 6(b) the heave motions do not show any obvi-ous distributing regularity according to 119878119863 ratio variationIt can be seen that most heaving values under small 119878119863ratios are less than 01m which fits the proposed mooringstability criterion in this paper As 119878119863 increases especially119878119863 = 10 most values over the period domain approachor exceed 01m which affects the surge motion oppositely Itis because larger 119878119863 ratios with greater opening angles willreduce the vertical tension under the same confined stress ofwire ropes
In order to deal with the paradoxical effects of 119878119863 =
10 on surge and heave motions two SWLs are added toreduce the vertical motions obtained with only CWLs InFigure 6(a) the coupled taut lines indeed show best per-formance on surge inhibitions and the amplitudes over theperiod domain decrease to less than 0025m On the otherhand effects on the heaving reduction are also evident andthe indicating values are all less than 005m Instead of settingadditional vertical CWL and weights the present designcould utilize two seabed weights at maximum extent tocontrol the costs
8 Mathematical Problems in Engineering
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
08
07
06
05
04
03
02
01
0
Period T (s)
(a) Surge119883
3 4 5 6 7
Am
plitu
de o
f hea
ve Z
(m)
04
03
02
01
0
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
Period T (s)
(b) Heave 119885
Figure 6 Effects of 119878119863 ratio on mooring system stability
44 Effects of Incident Wave Directions Since the layout oftaut lines is designed to be parallel to the incident wavedirection it is necessary to study the operating performanceof the mooring system under oblique waves Two angles areemployed as 45∘ and 90∘ in Figure 7(a) which are definedas included angles between incident wave directions and thelayout line of CWLs and SWLs119867 = 05m is still employed asthe operating wave height Figures 7(b) to 7(c) display effectsof incident wave directions on mooring system movementsin horizontal and vertical directions
In Figure 7(b) sway amplitudes become significantlygreater as expected when the incident angle increases Mostcalculated results under oblique waves exceed 02m for surgemotion A peak also can be found at 119879 = 50 s for both45∘ and 90∘ The maximum value is 088 which is over 4times higher than the criterion value For surge motions inFigure 7(c) the amplitudes under variouswave conditions areall less than 005m which will not affect the buoy operationobviously under oblique waves Although heave motions arenot increased as sharply as sways in Figure 7(d) their effectson the operating performance of oscillating buoys WEC aremore sensitiveTherefore it can be seen that current design ofmooring system cannot compete with oblique waves as wellas waves from the forward direction If at least two meandirections are employed in the design it can be imaginedthat cross arrangement of two sets of CWLs and SWLs willprovide a good performance to confront waves from variousdirections
45 Tension Analysis Tensile forces on the taut lines arecalculated under extreme wave conditions (119867 = 14m) withthree incident wave directions The mooring system is asfollows 2 SWLs and 2 CWLs 119878119863 = 10 The maximumvalues under each condition are extracted from time historiesof tension forces on all taut lines which occurs mostly onthe left CWL in Figure 2 The above values under variousincident directions are illustrated in Figure 8 It can be seenthat maximum tensions occur at 119879 = 40 s for all waveconditions and they decrease sharply as the wave periodincreases Although maximum tensions under all extremewave conditions do not exceed the allowed value of 138 kNthe tensile forces have approached this limit at 119879 = 40 swhich should be noted in the further design formore securityspace
5 Conclusions
A small oscillating wave energy converter has been designedfor electricity supply of nearshore ocean buoys The mooringsystem utilizes wire ropes as taut lines to connect thedamping plate and clump weight with seabed weights whichare investigated numerically to provide stationary state forheaving buoy operation Ansys-AQWAwas used to deal withthe potential flow waves and fluid structure interactions inthe time domain
It has been found that the damping plate could pro-vide a good station-keeping for the energy converting
Mathematical Problems in Engineering 9
CWL CWL
Y
X
O
0∘
45∘
90∘
(a) Incident angles of oblique waves
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(b) Surge119883
3 4 5 6 7
Am
plitu
de o
f sw
ay Y
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(c) Sway
3 4 5 6 7
1
08
06
04
02
0
Am
plitu
de o
f hea
ve Z
(m)
0∘
45∘
90∘
Period T (s)
(d) Heave 119885
Figure 7 Effects of incident wave direction on mooring system stability
compartment Under the current design parameters thediameter 119863 = 50m of the damping plate with single CWLshows best restraining results on the heaving motion of themooring facilities which also needs more support to controlthe surge Twin CWLs are then investigated and the ratio119878119863 = 10 can significantly reduce the surge motion andtwo added SWLs could help to reduce both surge and heaveamplitudes Oblique wave testing results suggest adding
the cross arrangement of CWLs and SWLs to deal with moreincident wave directions Calculated tensile forces on the tautlines demonstrate that the present design satisfies the allowedtension criterion
All the above results show that the mooring system uti-lized and optimized here is feasible and reliable In the futuremore detailed design is to be carried out for the prototypemachine manufacture Through rough calculations the costs
10 Mathematical Problems in Engineering
3 4 5 6 70
30
60
90
120
150
Tens
ion
(kN
)
0∘
45∘
90∘
Period T (s)
Figure 8 Tension forces on taut lines under extreme wave condi-tions
of the present mooring system are about 40 lower thanthose of the traditional 4 or 5 points mooring system Seatrials will be conducted in order to test the station-keepingcapability of the present mooring system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to the financial support provided byNational Natural Science Foundation of China (41376100)National High Technology Research and Development Pro-gram of China (863 Project 2012AA052601) Special Fundfor Ocean Renewable Energy of SOA (QDME2011GD02)Shandong Natural Science Funds for Distinguished YoungScholar (JQ201314) Qingdao Municipal Science amp Technol-ogy Program (13-4-1-38-hy) and the Program of IntroducingTalents of Discipline to Universities (111 Project B14028)
References
[1] E B Agamloh A KWallace and A von Jouanne ldquoApplicationof fluidndashstructure interaction simulation of an ocean waveenergy extraction devicerdquo Renewable Energy vol 33 no 4 pp748ndash757 2008
[2] Y-H Yu and Y Li ldquoReynolds-Averaged Navier-Stokes simula-tion of the heave performance of a two-body floating-pointabsorber wave energy systemrdquo Computers amp Fluids vol 73 pp104ndash114 2013
[3] A Umar and T K Datta ldquoNonlinear response of a mooredbuoyrdquo Ocean Engineering vol 30 no 13 pp 1625ndash1646 2003
[4] R Guanche V Gomez C Vidal and I Eguinoa ldquoNumericalanalysis and performance optimization of a submerged waveenergy point absorberrdquoOcean Engineering vol 59 pp 214ndash2302013
[5] Z-M Yuan A Incecik and C Y Ji ldquoNumerical study on ahybrid mooring system with clump weights and buoysrdquo OceanEngineering vol 88 pp 1ndash11 2014
[6] G Benassai A Campanile V Piscopo and A ScamardellaldquoMooring control of semi-submersible structures for windturbinesrdquo Procedia Engineering vol 70 pp 132ndash141 2014
[7] V Harnois S D Weller L Johanning et al ldquoNumerical modelvalidation for mooring systems method and application forwave energy convertersrdquoRenewable Energy vol 75 pp 869ndash8872015
[8] E E Bachynski Y L Young and R W Yeung ldquoAnalysis andoptimization of a tethered wave energy converter in irregularwavesrdquo Renewable Energy vol 48 pp 133ndash145 2012
[9] V Krivtsov and B Linfoot ldquoDisruption to benthic habitats bymoorings of wave energy installations a modelling case studyand implications for overall ecosystem functioningrdquo EcologicalModelling vol 245 pp 121ndash124 2012
[10] P C Vicente A F D O Falcao L M C Gato and P A PJustino ldquoDynamics of arrays of floating point-absorber waveenergy converters with inter-body and bottom slack-mooringconnectionsrdquoAppliedOcean Research vol 31 no 4 pp 267ndash2812009
[11] E Vijayakrishna Rapaka R Natarajan and S NeelamanildquoExperimental investigation on the dynamic response of amoored wave energy device under regular sea wavesrdquo OceanEngineering vol 31 no 5-6 pp 725ndash743 2004
[12] C Ji and Z Yuan ldquoExperimental study of a hybrid mooringsystemrdquo Journal of Marine Science and Technology vol 20 no2 pp 213ndash225 2015
[13] S Ambuhl M Sterndorff and J D Soslashrensen ldquoExtrapolationof extreme response for different mooring line systems of float-ing wave energy convertersrdquo International Journal of MarineEnergy vol 7 pp 1ndash19 2014
[14] J Fitzgerald and L Bergdahl ldquoIncluding moorings in theassessment of a generic offshore wave energy converter afrequency domain approachrdquo Marine Structures vol 21 no 1pp 23ndash46 2008
[15] P R Thies L Johanning V Harnois H C M Smith and DN Parish ldquoMooring line fatigue damage evaluation for floatingmarine energy converters field measurements and predictionrdquoRenewable Energy vol 63 pp 133ndash144 2014
[16] AnsysAQWATheoryManual Release 150 Ansys CanonsburgPa USA 2013
[17] Ansys AQWA-LINE Manual Release 145 Ansys CanonsburgPa USA 2012
[18] Ansys Inc AQWA-NAUT Manual Release 145 2012[19] Standardization Administration of Peoplersquos Republic of China
National Code of PRC Steel Wire Ropes for Important Pur-poses GB8918-2006 StandardizationAdministration of PeoplersquosRepublic of China 2006
[20] Q Na Study on hydrodynamic performance of oscillating buoyWEC considering power take-off system [MS thesis] OceanUniversity of China Qingdao China 2015 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
08
07
06
05
04
03
02
01
0
Period T (s)
(a) Surge119883
3 4 5 6 7
Am
plitu
de o
f hea
ve Z
(m)
04
03
02
01
0
SD = 0
SD = 02
SD = 04
SD = 06
SD = 08
SD = 10
SD = 10 with 2 SWLs
Period T (s)
(b) Heave 119885
Figure 6 Effects of 119878119863 ratio on mooring system stability
44 Effects of Incident Wave Directions Since the layout oftaut lines is designed to be parallel to the incident wavedirection it is necessary to study the operating performanceof the mooring system under oblique waves Two angles areemployed as 45∘ and 90∘ in Figure 7(a) which are definedas included angles between incident wave directions and thelayout line of CWLs and SWLs119867 = 05m is still employed asthe operating wave height Figures 7(b) to 7(c) display effectsof incident wave directions on mooring system movementsin horizontal and vertical directions
In Figure 7(b) sway amplitudes become significantlygreater as expected when the incident angle increases Mostcalculated results under oblique waves exceed 02m for surgemotion A peak also can be found at 119879 = 50 s for both45∘ and 90∘ The maximum value is 088 which is over 4times higher than the criterion value For surge motions inFigure 7(c) the amplitudes under variouswave conditions areall less than 005m which will not affect the buoy operationobviously under oblique waves Although heave motions arenot increased as sharply as sways in Figure 7(d) their effectson the operating performance of oscillating buoys WEC aremore sensitiveTherefore it can be seen that current design ofmooring system cannot compete with oblique waves as wellas waves from the forward direction If at least two meandirections are employed in the design it can be imaginedthat cross arrangement of two sets of CWLs and SWLs willprovide a good performance to confront waves from variousdirections
45 Tension Analysis Tensile forces on the taut lines arecalculated under extreme wave conditions (119867 = 14m) withthree incident wave directions The mooring system is asfollows 2 SWLs and 2 CWLs 119878119863 = 10 The maximumvalues under each condition are extracted from time historiesof tension forces on all taut lines which occurs mostly onthe left CWL in Figure 2 The above values under variousincident directions are illustrated in Figure 8 It can be seenthat maximum tensions occur at 119879 = 40 s for all waveconditions and they decrease sharply as the wave periodincreases Although maximum tensions under all extremewave conditions do not exceed the allowed value of 138 kNthe tensile forces have approached this limit at 119879 = 40 swhich should be noted in the further design formore securityspace
5 Conclusions
A small oscillating wave energy converter has been designedfor electricity supply of nearshore ocean buoys The mooringsystem utilizes wire ropes as taut lines to connect thedamping plate and clump weight with seabed weights whichare investigated numerically to provide stationary state forheaving buoy operation Ansys-AQWAwas used to deal withthe potential flow waves and fluid structure interactions inthe time domain
It has been found that the damping plate could pro-vide a good station-keeping for the energy converting
Mathematical Problems in Engineering 9
CWL CWL
Y
X
O
0∘
45∘
90∘
(a) Incident angles of oblique waves
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(b) Surge119883
3 4 5 6 7
Am
plitu
de o
f sw
ay Y
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(c) Sway
3 4 5 6 7
1
08
06
04
02
0
Am
plitu
de o
f hea
ve Z
(m)
0∘
45∘
90∘
Period T (s)
(d) Heave 119885
Figure 7 Effects of incident wave direction on mooring system stability
compartment Under the current design parameters thediameter 119863 = 50m of the damping plate with single CWLshows best restraining results on the heaving motion of themooring facilities which also needs more support to controlthe surge Twin CWLs are then investigated and the ratio119878119863 = 10 can significantly reduce the surge motion andtwo added SWLs could help to reduce both surge and heaveamplitudes Oblique wave testing results suggest adding
the cross arrangement of CWLs and SWLs to deal with moreincident wave directions Calculated tensile forces on the tautlines demonstrate that the present design satisfies the allowedtension criterion
All the above results show that the mooring system uti-lized and optimized here is feasible and reliable In the futuremore detailed design is to be carried out for the prototypemachine manufacture Through rough calculations the costs
10 Mathematical Problems in Engineering
3 4 5 6 70
30
60
90
120
150
Tens
ion
(kN
)
0∘
45∘
90∘
Period T (s)
Figure 8 Tension forces on taut lines under extreme wave condi-tions
of the present mooring system are about 40 lower thanthose of the traditional 4 or 5 points mooring system Seatrials will be conducted in order to test the station-keepingcapability of the present mooring system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to the financial support provided byNational Natural Science Foundation of China (41376100)National High Technology Research and Development Pro-gram of China (863 Project 2012AA052601) Special Fundfor Ocean Renewable Energy of SOA (QDME2011GD02)Shandong Natural Science Funds for Distinguished YoungScholar (JQ201314) Qingdao Municipal Science amp Technol-ogy Program (13-4-1-38-hy) and the Program of IntroducingTalents of Discipline to Universities (111 Project B14028)
References
[1] E B Agamloh A KWallace and A von Jouanne ldquoApplicationof fluidndashstructure interaction simulation of an ocean waveenergy extraction devicerdquo Renewable Energy vol 33 no 4 pp748ndash757 2008
[2] Y-H Yu and Y Li ldquoReynolds-Averaged Navier-Stokes simula-tion of the heave performance of a two-body floating-pointabsorber wave energy systemrdquo Computers amp Fluids vol 73 pp104ndash114 2013
[3] A Umar and T K Datta ldquoNonlinear response of a mooredbuoyrdquo Ocean Engineering vol 30 no 13 pp 1625ndash1646 2003
[4] R Guanche V Gomez C Vidal and I Eguinoa ldquoNumericalanalysis and performance optimization of a submerged waveenergy point absorberrdquoOcean Engineering vol 59 pp 214ndash2302013
[5] Z-M Yuan A Incecik and C Y Ji ldquoNumerical study on ahybrid mooring system with clump weights and buoysrdquo OceanEngineering vol 88 pp 1ndash11 2014
[6] G Benassai A Campanile V Piscopo and A ScamardellaldquoMooring control of semi-submersible structures for windturbinesrdquo Procedia Engineering vol 70 pp 132ndash141 2014
[7] V Harnois S D Weller L Johanning et al ldquoNumerical modelvalidation for mooring systems method and application forwave energy convertersrdquoRenewable Energy vol 75 pp 869ndash8872015
[8] E E Bachynski Y L Young and R W Yeung ldquoAnalysis andoptimization of a tethered wave energy converter in irregularwavesrdquo Renewable Energy vol 48 pp 133ndash145 2012
[9] V Krivtsov and B Linfoot ldquoDisruption to benthic habitats bymoorings of wave energy installations a modelling case studyand implications for overall ecosystem functioningrdquo EcologicalModelling vol 245 pp 121ndash124 2012
[10] P C Vicente A F D O Falcao L M C Gato and P A PJustino ldquoDynamics of arrays of floating point-absorber waveenergy converters with inter-body and bottom slack-mooringconnectionsrdquoAppliedOcean Research vol 31 no 4 pp 267ndash2812009
[11] E Vijayakrishna Rapaka R Natarajan and S NeelamanildquoExperimental investigation on the dynamic response of amoored wave energy device under regular sea wavesrdquo OceanEngineering vol 31 no 5-6 pp 725ndash743 2004
[12] C Ji and Z Yuan ldquoExperimental study of a hybrid mooringsystemrdquo Journal of Marine Science and Technology vol 20 no2 pp 213ndash225 2015
[13] S Ambuhl M Sterndorff and J D Soslashrensen ldquoExtrapolationof extreme response for different mooring line systems of float-ing wave energy convertersrdquo International Journal of MarineEnergy vol 7 pp 1ndash19 2014
[14] J Fitzgerald and L Bergdahl ldquoIncluding moorings in theassessment of a generic offshore wave energy converter afrequency domain approachrdquo Marine Structures vol 21 no 1pp 23ndash46 2008
[15] P R Thies L Johanning V Harnois H C M Smith and DN Parish ldquoMooring line fatigue damage evaluation for floatingmarine energy converters field measurements and predictionrdquoRenewable Energy vol 63 pp 133ndash144 2014
[16] AnsysAQWATheoryManual Release 150 Ansys CanonsburgPa USA 2013
[17] Ansys AQWA-LINE Manual Release 145 Ansys CanonsburgPa USA 2012
[18] Ansys Inc AQWA-NAUT Manual Release 145 2012[19] Standardization Administration of Peoplersquos Republic of China
National Code of PRC Steel Wire Ropes for Important Pur-poses GB8918-2006 StandardizationAdministration of PeoplersquosRepublic of China 2006
[20] Q Na Study on hydrodynamic performance of oscillating buoyWEC considering power take-off system [MS thesis] OceanUniversity of China Qingdao China 2015 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
CWL CWL
Y
X
O
0∘
45∘
90∘
(a) Incident angles of oblique waves
3 4 5 6 7
Am
plitu
de o
f sur
geX
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(b) Surge119883
3 4 5 6 7
Am
plitu
de o
f sw
ay Y
(m)
1
08
06
04
02
0
0∘
45∘
90∘
Period T (s)
(c) Sway
3 4 5 6 7
1
08
06
04
02
0
Am
plitu
de o
f hea
ve Z
(m)
0∘
45∘
90∘
Period T (s)
(d) Heave 119885
Figure 7 Effects of incident wave direction on mooring system stability
compartment Under the current design parameters thediameter 119863 = 50m of the damping plate with single CWLshows best restraining results on the heaving motion of themooring facilities which also needs more support to controlthe surge Twin CWLs are then investigated and the ratio119878119863 = 10 can significantly reduce the surge motion andtwo added SWLs could help to reduce both surge and heaveamplitudes Oblique wave testing results suggest adding
the cross arrangement of CWLs and SWLs to deal with moreincident wave directions Calculated tensile forces on the tautlines demonstrate that the present design satisfies the allowedtension criterion
All the above results show that the mooring system uti-lized and optimized here is feasible and reliable In the futuremore detailed design is to be carried out for the prototypemachine manufacture Through rough calculations the costs
10 Mathematical Problems in Engineering
3 4 5 6 70
30
60
90
120
150
Tens
ion
(kN
)
0∘
45∘
90∘
Period T (s)
Figure 8 Tension forces on taut lines under extreme wave condi-tions
of the present mooring system are about 40 lower thanthose of the traditional 4 or 5 points mooring system Seatrials will be conducted in order to test the station-keepingcapability of the present mooring system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to the financial support provided byNational Natural Science Foundation of China (41376100)National High Technology Research and Development Pro-gram of China (863 Project 2012AA052601) Special Fundfor Ocean Renewable Energy of SOA (QDME2011GD02)Shandong Natural Science Funds for Distinguished YoungScholar (JQ201314) Qingdao Municipal Science amp Technol-ogy Program (13-4-1-38-hy) and the Program of IntroducingTalents of Discipline to Universities (111 Project B14028)
References
[1] E B Agamloh A KWallace and A von Jouanne ldquoApplicationof fluidndashstructure interaction simulation of an ocean waveenergy extraction devicerdquo Renewable Energy vol 33 no 4 pp748ndash757 2008
[2] Y-H Yu and Y Li ldquoReynolds-Averaged Navier-Stokes simula-tion of the heave performance of a two-body floating-pointabsorber wave energy systemrdquo Computers amp Fluids vol 73 pp104ndash114 2013
[3] A Umar and T K Datta ldquoNonlinear response of a mooredbuoyrdquo Ocean Engineering vol 30 no 13 pp 1625ndash1646 2003
[4] R Guanche V Gomez C Vidal and I Eguinoa ldquoNumericalanalysis and performance optimization of a submerged waveenergy point absorberrdquoOcean Engineering vol 59 pp 214ndash2302013
[5] Z-M Yuan A Incecik and C Y Ji ldquoNumerical study on ahybrid mooring system with clump weights and buoysrdquo OceanEngineering vol 88 pp 1ndash11 2014
[6] G Benassai A Campanile V Piscopo and A ScamardellaldquoMooring control of semi-submersible structures for windturbinesrdquo Procedia Engineering vol 70 pp 132ndash141 2014
[7] V Harnois S D Weller L Johanning et al ldquoNumerical modelvalidation for mooring systems method and application forwave energy convertersrdquoRenewable Energy vol 75 pp 869ndash8872015
[8] E E Bachynski Y L Young and R W Yeung ldquoAnalysis andoptimization of a tethered wave energy converter in irregularwavesrdquo Renewable Energy vol 48 pp 133ndash145 2012
[9] V Krivtsov and B Linfoot ldquoDisruption to benthic habitats bymoorings of wave energy installations a modelling case studyand implications for overall ecosystem functioningrdquo EcologicalModelling vol 245 pp 121ndash124 2012
[10] P C Vicente A F D O Falcao L M C Gato and P A PJustino ldquoDynamics of arrays of floating point-absorber waveenergy converters with inter-body and bottom slack-mooringconnectionsrdquoAppliedOcean Research vol 31 no 4 pp 267ndash2812009
[11] E Vijayakrishna Rapaka R Natarajan and S NeelamanildquoExperimental investigation on the dynamic response of amoored wave energy device under regular sea wavesrdquo OceanEngineering vol 31 no 5-6 pp 725ndash743 2004
[12] C Ji and Z Yuan ldquoExperimental study of a hybrid mooringsystemrdquo Journal of Marine Science and Technology vol 20 no2 pp 213ndash225 2015
[13] S Ambuhl M Sterndorff and J D Soslashrensen ldquoExtrapolationof extreme response for different mooring line systems of float-ing wave energy convertersrdquo International Journal of MarineEnergy vol 7 pp 1ndash19 2014
[14] J Fitzgerald and L Bergdahl ldquoIncluding moorings in theassessment of a generic offshore wave energy converter afrequency domain approachrdquo Marine Structures vol 21 no 1pp 23ndash46 2008
[15] P R Thies L Johanning V Harnois H C M Smith and DN Parish ldquoMooring line fatigue damage evaluation for floatingmarine energy converters field measurements and predictionrdquoRenewable Energy vol 63 pp 133ndash144 2014
[16] AnsysAQWATheoryManual Release 150 Ansys CanonsburgPa USA 2013
[17] Ansys AQWA-LINE Manual Release 145 Ansys CanonsburgPa USA 2012
[18] Ansys Inc AQWA-NAUT Manual Release 145 2012[19] Standardization Administration of Peoplersquos Republic of China
National Code of PRC Steel Wire Ropes for Important Pur-poses GB8918-2006 StandardizationAdministration of PeoplersquosRepublic of China 2006
[20] Q Na Study on hydrodynamic performance of oscillating buoyWEC considering power take-off system [MS thesis] OceanUniversity of China Qingdao China 2015 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
3 4 5 6 70
30
60
90
120
150
Tens
ion
(kN
)
0∘
45∘
90∘
Period T (s)
Figure 8 Tension forces on taut lines under extreme wave condi-tions
of the present mooring system are about 40 lower thanthose of the traditional 4 or 5 points mooring system Seatrials will be conducted in order to test the station-keepingcapability of the present mooring system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The authors are grateful to the financial support provided byNational Natural Science Foundation of China (41376100)National High Technology Research and Development Pro-gram of China (863 Project 2012AA052601) Special Fundfor Ocean Renewable Energy of SOA (QDME2011GD02)Shandong Natural Science Funds for Distinguished YoungScholar (JQ201314) Qingdao Municipal Science amp Technol-ogy Program (13-4-1-38-hy) and the Program of IntroducingTalents of Discipline to Universities (111 Project B14028)
References
[1] E B Agamloh A KWallace and A von Jouanne ldquoApplicationof fluidndashstructure interaction simulation of an ocean waveenergy extraction devicerdquo Renewable Energy vol 33 no 4 pp748ndash757 2008
[2] Y-H Yu and Y Li ldquoReynolds-Averaged Navier-Stokes simula-tion of the heave performance of a two-body floating-pointabsorber wave energy systemrdquo Computers amp Fluids vol 73 pp104ndash114 2013
[3] A Umar and T K Datta ldquoNonlinear response of a mooredbuoyrdquo Ocean Engineering vol 30 no 13 pp 1625ndash1646 2003
[4] R Guanche V Gomez C Vidal and I Eguinoa ldquoNumericalanalysis and performance optimization of a submerged waveenergy point absorberrdquoOcean Engineering vol 59 pp 214ndash2302013
[5] Z-M Yuan A Incecik and C Y Ji ldquoNumerical study on ahybrid mooring system with clump weights and buoysrdquo OceanEngineering vol 88 pp 1ndash11 2014
[6] G Benassai A Campanile V Piscopo and A ScamardellaldquoMooring control of semi-submersible structures for windturbinesrdquo Procedia Engineering vol 70 pp 132ndash141 2014
[7] V Harnois S D Weller L Johanning et al ldquoNumerical modelvalidation for mooring systems method and application forwave energy convertersrdquoRenewable Energy vol 75 pp 869ndash8872015
[8] E E Bachynski Y L Young and R W Yeung ldquoAnalysis andoptimization of a tethered wave energy converter in irregularwavesrdquo Renewable Energy vol 48 pp 133ndash145 2012
[9] V Krivtsov and B Linfoot ldquoDisruption to benthic habitats bymoorings of wave energy installations a modelling case studyand implications for overall ecosystem functioningrdquo EcologicalModelling vol 245 pp 121ndash124 2012
[10] P C Vicente A F D O Falcao L M C Gato and P A PJustino ldquoDynamics of arrays of floating point-absorber waveenergy converters with inter-body and bottom slack-mooringconnectionsrdquoAppliedOcean Research vol 31 no 4 pp 267ndash2812009
[11] E Vijayakrishna Rapaka R Natarajan and S NeelamanildquoExperimental investigation on the dynamic response of amoored wave energy device under regular sea wavesrdquo OceanEngineering vol 31 no 5-6 pp 725ndash743 2004
[12] C Ji and Z Yuan ldquoExperimental study of a hybrid mooringsystemrdquo Journal of Marine Science and Technology vol 20 no2 pp 213ndash225 2015
[13] S Ambuhl M Sterndorff and J D Soslashrensen ldquoExtrapolationof extreme response for different mooring line systems of float-ing wave energy convertersrdquo International Journal of MarineEnergy vol 7 pp 1ndash19 2014
[14] J Fitzgerald and L Bergdahl ldquoIncluding moorings in theassessment of a generic offshore wave energy converter afrequency domain approachrdquo Marine Structures vol 21 no 1pp 23ndash46 2008
[15] P R Thies L Johanning V Harnois H C M Smith and DN Parish ldquoMooring line fatigue damage evaluation for floatingmarine energy converters field measurements and predictionrdquoRenewable Energy vol 63 pp 133ndash144 2014
[16] AnsysAQWATheoryManual Release 150 Ansys CanonsburgPa USA 2013
[17] Ansys AQWA-LINE Manual Release 145 Ansys CanonsburgPa USA 2012
[18] Ansys Inc AQWA-NAUT Manual Release 145 2012[19] Standardization Administration of Peoplersquos Republic of China
National Code of PRC Steel Wire Ropes for Important Pur-poses GB8918-2006 StandardizationAdministration of PeoplersquosRepublic of China 2006
[20] Q Na Study on hydrodynamic performance of oscillating buoyWEC considering power take-off system [MS thesis] OceanUniversity of China Qingdao China 2015 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of