
Research Article Dynamic Response of a Rigid...
10
Research Article Dynamic Response of a Rigid Pavement Plate Based on an Inertial Soil Mohamed Gibigaye, Crespin Prudence Yabi, and I. Ezéchiel Alloba University of Abomey-Calavi, 01 BP 2009 Cotonou, Benin Correspondence should be addressed to Mohamed Gibigaye; gibigaye [email protected] Received 7 November 2015; Accepted 15 December 2015 Academic Editor: ¨ Omer C´ ıvalek Copyright © 2016 Mohamed Gibigaye et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. is work presents the dynamic response of a pavement plate resting on a soil whose inertia is taken into account in the design of pavements by rational methods. us, the pavement is modeled as a thin plate with finite dimensions, supported longitudinally by dowels and laterally by tie bars. e subgrade is modeled via Pasternak-Vlasov type (three-parameter type) foundation models and the moving traffic load is expressed as a concentrated dynamic load of harmonically varying magnitude, moving straight along the plate with a constant acceleration. e governing equation of the problem is solved using the modified Bolotin method for determining the natural frequencies and the wavenumbers of the system. e orthogonal properties of eigenfunctions are used to find the general solution of the problem. Considering the load over the center of the plate, the results showed that the deflections of the plate are maximum about the middle of the plate but are not null at its edges. It is therefore observed that the deflection decreased 18.33 percent when the inertia of the soil is taken into account. is result shows the possible economic gain when taking into account the inertia of soil in pavement dynamic design. 1. Introduction Pavements are an essential feature of the urban communica- tion system and provide an efficient means of transportation of goods and services. Depending on its rigidity compared to the subsoil, pavements are classified as flexible, rigid, and semiflexible [1]. To design these classes of pavements, the rational methods models are oſten used. e backbone of a method of roadway design is the mechanical model used to define the structure [2]. In the case of rigid pavements, the most used models are the multilayer elastic model of Burmister [3] and the Westergaard model, assuming pavement as a plate resting on the Winkler soil type [2, 4–6]. e differences between the pavement and the soil rigidities were conducted by Ullidtz [7], to deduce that Burmister model is generally not considered as an appropriate tool for the analysis of a rigid pavement response. en, the large used design model of existing rigid pavement is Westergaard’s, using the Winkler soil type. Although Winkler model leads to relatively simplified results, it has serious limitations [1]. Firstly, there is the deflection discontinuity between the charged and the uncharged part of pavement plate. Secondly, both models consider loads usually as a static one applied on a plate [2–4, 8]. According to Sun and Greenberg (2000) cited by St-Laurent [9], traffic loads on the pavement induce inertial effects that must be supported by foresaid pavement. us, the static load model does not reflect accurately the actual conditions of load on the pavement [10]. During the last decade, many researchers have examined the problem assuming the loads as a dynamic one [1, 8, 10]. In the studies mentioned above, the soil used in the structure modeling are Winkler soil type. But, according to the design guide of United States National Cooperative Highway Research Program (NCHRP) [11], the two-parameter Pasternak model is designated in 1998 as the best pavement option to model the foundation of pavements. From that, many researchers base theirs works on using this type of soil [12, 13]. Alisjahbana and Wangsadinata [14] looked at the dynamic analysis of a rigid pavement under mobile load resting on Pasternak soil type. Based on this model, the determination of soil parameters is only based on the elasticity modulus and Poisson’s ratio. On the other hand, the Pasternak-Vlasov model that takes into account the logarithmic decrement of soil was used Hindawi Publishing Corporation International Scholarly Research Notices Volume 2016, Article ID 4975345, 9 pages http://dx.doi.org/10.1155/2016/4975345
Transcript of Research Article Dynamic Response of a Rigid...
Research ArticleDynamic Response of a Rigid Pavement Plate Based onan Inertial Soil
Mohamed Gibigaye Crespin Prudence Yabi and I Ezeacutechiel Alloba
University of Abomey-Calavi 01 BP 2009 Cotonou Benin
Correspondence should be addressed to Mohamed Gibigaye gibigaye mohamedyahoofr
Received 7 November 2015 Accepted 15 December 2015
Academic Editor Omer Cıvalek
Copyright copy 2016 Mohamed Gibigaye et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
This work presents the dynamic response of a pavement plate resting on a soil whose inertia is taken into account in the designof pavements by rational methods Thus the pavement is modeled as a thin plate with finite dimensions supported longitudinallyby dowels and laterally by tie bars The subgrade is modeled via Pasternak-Vlasov type (three-parameter type) foundation modelsand the moving traffic load is expressed as a concentrated dynamic load of harmonically varying magnitude moving straight alongthe plate with a constant acceleration The governing equation of the problem is solved using the modified Bolotin method fordetermining the natural frequencies and the wavenumbers of the system The orthogonal properties of eigenfunctions are used tofind the general solution of the problem Considering the load over the center of the plate the results showed that the deflectionsof the plate are maximum about the middle of the plate but are not null at its edges It is therefore observed that the deflectiondecreased 1833 percent when the inertia of the soil is taken into accountThis result shows the possible economic gain when takinginto account the inertia of soil in pavement dynamic design
1 Introduction
Pavements are an essential feature of the urban communica-tion system and provide an efficient means of transportationof goods and services Depending on its rigidity comparedto the subsoil pavements are classified as flexible rigid andsemiflexible [1] To design these classes of pavements therational methods models are often used The backbone of amethod of roadway design is the mechanical model used todefine the structure [2]
In the case of rigid pavements the most used modelsare the multilayer elastic model of Burmister [3] and theWestergaard model assuming pavement as a plate restingon the Winkler soil type [2 4ndash6] The differences betweenthe pavement and the soil rigidities were conducted byUllidtz [7] to deduce that Burmister model is generallynot considered as an appropriate tool for the analysis ofa rigid pavement response Then the large used designmodel of existing rigid pavement is Westergaardrsquos usingthe Winkler soil type Although Winkler model leads torelatively simplified results it has serious limitations [1]Firstly there is the deflection discontinuity between the
charged and the uncharged part of pavement plate Secondlyboth models consider loads usually as a static one appliedon a plate [2ndash4 8] According to Sun and Greenberg (2000)cited by St-Laurent [9] traffic loads on the pavement induceinertial effects that must be supported by foresaid pavementThus the static load model does not reflect accurately theactual conditions of load on the pavement [10] During thelast decade many researchers have examined the problemassuming the loads as a dynamic one [1 8 10] In the studiesmentioned above the soil used in the structure modelingare Winkler soil type But according to the design guideof United States National Cooperative Highway ResearchProgram (NCHRP) [11] the two-parameter Pasternak modelis designated in 1998 as the best pavement option tomodel thefoundation of pavements From that many researchers basetheirs works on using this type of soil [12 13] Alisjahbana andWangsadinata [14] looked at the dynamic analysis of a rigidpavement under mobile load resting on Pasternak soil typeBased on this model the determination of soil parametersis only based on the elasticity modulus and Poissonrsquos ratioOn the other hand the Pasternak-Vlasov model that takesinto account the logarithmic decrement of soil was used
Hindawi Publishing CorporationInternational Scholarly Research NoticesVolume 2016 Article ID 4975345 9 pageshttpdxdoiorg10115520164975345
2 International Scholarly Research Notices
by Rahman and Anam [1] using the finite element methodThe study of Rahman also showed that the Pasternak-Vlasovmodel is more economical than that of Winkler and cannotarbitrarily set the values of the intrinsic characteristics of thesoil
In most models used previously the dynamic effect istaken into account only by the inertia of the plate [11 15]Concerning the soil inertia is neglected in dynamicmodelingof pavement structure However Civalek [16] took intoaccount the inertia of the soil but had defined as constantindependents values the intrinsic parameters of soil Heconcluded that the effect of foundation inertia on the centraldeflection of the finite plate is not considerable But accordingto the results of Pan and Atlurirsquos work [17] in engineeringpractice this is still not always the case and this factor mayhave significant effects on the dynamic response of the platemodeling the pavement For these reasons several studieshave tried to modify the Pasternak-Vlasov soil introducingthe inertia of the soil to a depth of soil susceptible todynamic forces applied to the structure Gibigaye in hiswork used an inertia soil model foundation for the studyof the behavior of shells modeling underground shells [18]He concluded that it is important to take into accountthe inertia of the foundation soil on the dynamic responseof civil engineering structures Besides Dimitrovova [19]noted that the classical formula which predicts a criticalvelocity of load significantly is overestimated compared tothe one experienced in reality She indicated that this formulashould be revised by introducing two important notions theeffective finite depth of the foundation that is dynamicallyactivated and the inertial effect of this activated foundationlayer
This work investigates dynamic response of a rigid pave-ment resting on an inertial soil For that the rigid pavementismodeled as a thin plate with dowels and tie bars in its edges
In order to take into account its inertia the soil ismodeledas a three-parameter type (119896
119900119862119900 and119898
119900 resp integral char-
acteristics in compression and in shearing and reduced massof the foundation soil) The boundary conditions of theseplates aremodeled by two linear relationships between strainsand stresses at the plate edges The homogeneous solutionof the problem is achieved by the method of separation ofvariables so that the superposition gives a solution satisfyingthe boundary conditions Since the deformation is expressedas eigenfunctions products the solution of the dynamicproblem is obtained based on the orthogonality propertiesof eigenfunctions The general solution of the problem isobtained from the specific properties of the Dirac deltafunction This paper provides an overview of the dynamicanalysis of rigid pavements response as described above
2 Materials and Methods
21 Governing Equation In this research work an isotropichomogeneous elastic rectangular plate resting on an elasticthree-parameter soil is considered to model a pavement Theadjacent plates are supposed to be joined by dowels and tiebars Based on the work of Asik [20] and Gibigaye work inthe cylindrical axis system [18] the soil response according
to the deflection 119908(119909 119910 119911 119905) at a given point inside the soillayer is equivalent to
119902119904(119909 119910 119911 119905) = 119896
119900119908 (119909 119910 119911 119905) minus 119888
119900nabla2
119908 (119909 119910 119911 119905)
+ 119898119900
1205972
119908 (119909 119910 119911 119905)
1205971199052
(1)
where 119909 119910 119911 and 119905 are space-time coordinates of the soilstudying point 119908(119909 119910 119911 119905) is the deflection inside the soillayer defined as 119908(119909 119910 119911 119905) = 119908(119909 119910 0 119905) sdot 120601(119911) and 120601(119911) =sinh[120574(1 minus 119911119867
119904)]sinh 120574 is a vertical decay function of soil
that must verify 120601(0) = 1 and 120601(119867119904) = 0 119896
119900 119888119900 and
119898119900are respectively integral characteristics in compression
and in shearing and linear reduced mass of the foundationsoil supposed to be homogeneous and monolayer They areexpressed as follows [21]
119896119900=
119864119900
1 minus 1205922119904
int
119867119904
0
[1206011015840
(119911)]2
119889119911
=119864119900
2119867119904(1 minus 1205922
119904)
120574 (120574 + sinh 120574 cosh 120574)(sinh 120574)2
119888119900=
119864119900
2 (1 + 120592119904)int
119867119904
0
[120601 (119911)]2
119889119911
=119864119900119867119904
2 (1 + 120592119904)
120574 (sinh 120574 cosh 120574 minus 120574)120574 (sinh 120574)2
119898119900= 119898int
119867119904
0
[120601 (119911)]2
119889119911 =119898119867119904(sinh 120574 cosh 120574 minus 120574)2120574 (sinh 120574)2
(2)
where 119867119904is the effective finite depth of the foundation that
is dynamically activated 119898 is the density of the subgrade 120574is a constant named logarithmic decrement of the soil whichdeterminates the rate of decrease of the deflections dependingon the depth 119864
119900is Youngrsquos Modulus 120592 is Poissonrsquos ratio
According to the classic theory of thin plates and iftaking into account the reduced mass of soil the transversedeflection of the Kirchhoff plate satisfies the following partialdifferential equation
119863nabla4
119908 (119909 119910 119905) + 119896119900119908 (119909 119910 119905) minus 119888
119900nabla2
119908 (119909 119910 119905)
+ 120574ℎ120597119908 (119909 119910 119905)
120597119905+ (120588ℎ + 119898
119900)1205972
119908 (119909 119910 119905)
1205971199052
= 119901 (119909 119910 119905)
(3)
119908(119909 119910 119905) = 119908(119909 119910 0 119905) is the deflection of Kirchhoff platewhich is equal to the deflection of the platesoil interface
119901(119909 119910 119905) = 119901119900[1 + (12) cos(120596 sdot 119905)]120575[119909 minus 119909(119905)]120575[119910 minus 119910(119905)]
is the load transmitted to the pavement [14] Here 119909(119905) =
V119900119905 + (12)acc(1199052) 119910(119905) = (12)119887 are the geometrical position
of load at the time 119905 119901119900is the magnitude of the moving
wheel load acc is the acceleration of the load120596 is the angularfrequency of the applied load 120575 is theDirac function 119886 119887 andℎ are the dimensions of the finite plate and 119863 is the flexuralstiffness of the plate
International Scholarly Research Notices 3
h
h
Edge vertical translational restriction
Edge verticalrotational restriction
Tie barsa
b
Dowels
O
y
x
p(x y t)
Spring layer koShear layer co
y(t) =1
2b
x(t) =1
2acc middot t2 + ot
Figure 1 Modeling of doweled rigid pavement under moving load[14]
The boundary conditions (Figure 1) are modeled as fol-lows
(i) The restriction of the elastic vertical translation ischaracterized by the four equations [14]
119881119909=0
= minus119863[1205973
119908 (0 119910 119905)
1205971199093+ (2 minus 120592)
1205973
119908 (0 119910 119905)
1205971199091205971199102]
= 1198961199041199091119908 (0 119910 119905)
(4a)
119881119909=119886
= minus119863[1205973
119908 (119886 119910 119905)
1205971199093+ (2 minus 120592)
1205973
119908 (119886 119910 119905)
1205971199091205971199102]
= 1198961199041199092119908 (119886 119910 119905)
(4b)
119881119910=0
= minus119863[1205973
119908 (119909 0 119905)
1205971199103+ (2 minus 120592)
1205973
119908 (119909 0 119905)
1205971199101205971199092]
= 1198961199041199101119908 (119909 0 119905)
(4c)
119881119910=119887
= minus119863[1205973
119908 (119909 119887 119905)
1205971199103+ (2 minus 120592)
1205973
119908 (119909 119887 119905)
1205971199101205971199092]
= 1198961199041199102119908 (119909 119887 119905)
(4d)
where 1198961199041199091 1198961199041199092 1198961199041199101 and 119896119904
1199102are the elastic vertical
translation stiffness and 119881119909 119881119910are the vertical shear forces
of the plate
(ii) The restriction of the elastic rotation is characterizedby the following four equations [14]
119872119909=0
= minus119863[1205972
119908 (0 119910 119905)
1205971199092+ 120592
1205972
119908 (0 119910 119905)
1205971199102]
= 1198961199031199091
120597nabla2
119908 (0 119910 119905)
120597119909
(5a)
119872119909=119886
= minus119863[1205972
119908 (119886 119910 119905)
1205971199092+ 120592
1205972
119908 (119886 119910 119905)
1205971199102]
= 1198961199031199092
120597nabla2
119908 (119886 119910 119905)
120597119909
(5b)
119872119910=0
= minus119863[1205972
119908 (119909 0 119905)
1205971199102+ 120592
1205972
119908 (119909 0 119905)
1205971199092]
= 1198961199031199101
120597nabla2
119908 (119909 0 119905)
120597119910
(5c)
119872119910=119887
= minus119863[1205972
119908 (119909 119887 119905)
1205971199102+ 120592
1205972
119908 (119909 119887 119905)
1205971199092]
= 1198961199031199102
120597nabla2
119908 (119909 119887 119905)
120597119910
(5d)
where 1198961199031199091 1198961199031199092 1198961199031199101 and 119896119903
1199102are the elastic rotational
stiffness and119872119909119872119910are the bending moments of the finite
plateThe initial conditions (119905 = 0 s) are
120597119908 (119909 119910 0)
120597119905= 119908 (119909 119910 0) = 0 (6)
22 Resolution of the Problem
221 Determination of the Eigenfrequencies In order to solvegoverning equation (3) of the problem it is assumed that theprincipal elastic axes of the plate are parallel to its edges Thefree vibrations solution of the problem is set as [14 20]
119908 (119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119882119898119899(119909 119910) sin (120596
119898119899119905) (7)
120596119898119899
is the circular frequency of plate and 119882119898119899
is thefunction of position coordinates determined for the modenumbers 119898 and 119899 in 119909- and 119910-directions This form satisfiesthe initial conditions and the undamped free vibrationsequationTherefore natural modes satisfy the equation below[22]
119863nabla4
119908 (119909 119910 119905) + 119896119900119908 (119909 119910 119905) minus 119888
119900nabla2
119908 (119909 119910 119905)
+ (120588ℎ + 119898119900)1205972
119908 (119909 119910 119905)
1205971199052= 0
(8)
Equation (7) in (8) gives
119863nabla4
119882119898119899minus (120588ℎ + 119898
119900) 1205962
119898119899119882119898119899+ 119896119900119882119898119899minus 119888119900nabla2
119882119898119899
= 0
(9)
4 International Scholarly Research Notices
This equation is independent of time as the function119882119898119899
Such a problem has solutions which may be in Navierrsquos form[23 24]
119882119898119899(119909 119910) = 119860
119898119899sin(
119901120587
119886119909) sin(
119902120587
119887119910) (10)
Here119901 and 119902 aremode numbers of the plateThey are realnumbers because of the boundary conditions of the problem[14 22 25] and 119898 119899 are their respective roundness to thenearest integer number The eigenfrequencies solutions of(9) are for the first auxiliary problem those which satisfyboundary conditions (5a) (5b) (5c) and (5d)
1205962
119898119899=
1198631205874
120588ℎ + 119898119900
[(119901
119886)
4
+ 2 (119901119902
119886119887)
2
+ (119902
119887)
4
]
+119896119900
120588ℎ + 119898119900
+119888119900
120588ℎ + 119898119900
[(119901120587
119886)
2
+ (119902120587
119887)
2
]
(11)
222 Determination of Eigenmodes of the Plate To obtainthe mode numbers 119901 and 119902 and the eigenfunctions modifiedBolotin method is used This consists of the resolution of thetwo auxiliary Levyrsquos problems That can permit determiningthe eigenmode of the plate
(i) First Auxiliary Levy Problem The solution of (9) for thefirst auxiliary problem that satisfies the boundary conditionsof (4a) (4b) (5a) and (5b) can be expressed as
119882119898119899(119909 119910) = 119883
119898119899(119909) sin(
119902120587
119887119910) (12)
where119883119898119899(119909) is the eigenmode of the plate in the119909-direction
Substituting (12) into (9) we obtain an ordinary differen-tial equation for119883
119898119899(119910)
1198894
119883119898119899(119909)
1198891199094minus [2 (
119902120587
119887)
2
+119888119900
119863]1198892
119883119898119899(119909)
1198891199092
minus (119901120587
119886)
2
[(119901120587
119886)
2
+ 2 (119902120587
119887)
2
+119888119900
119863]119883119898119899(119909)
= 0
(13)
The solutions of the characteristic equation of (13) are
12058212= plusmn
120587
119886119887
radic211990221198862 + 11990121198872 +1198881199001198862
1198872
1198631205872
12058234= plusmn
119901120587
119886119894
(14)
For 120573 = radic211990221198862 + 11990121198872 + (119888119900119886211988721198631205872)119883(119909) becomes
119883119898119899(119909) = 119860
1cosh(
120573120587
119886119887119909) + 119860
2sinh(
120573120587
119886119887119909)
+ 1198603cos(
119901120587
119886119909) + 119860
4sin(
119901120587
119886119909)
(15)
Equation (15) gives the general form of the eigenmode ofthe plate in the 119909-direction
Boundary conditions along 119909-axis permit determiningthe 119860
119894coefficients
119886111198601+ 119886121198602+ 119886131198603+ 119886141198604= 0
119886211198601+ 119886221198602+ 119886231198603+ 119886241198604= 0
119886311198601+ 119886321198602+ 119886331198603+ 119886341198604= 0
119886411198601+ 119886421198602+ 119886431198603+ 119886441198604= 0
(16)
where 119886119894119895coefficients are given by
11988611= 1198961199041199091
11988612= 119863(
120573120587
119886)
3
minus 119863(120573120587
119886119887)(
119902120587
119886)
2
11988613= 1198961199041199091
11988614= minus119863[(
119901120587
119886)
3
+ (2 minus 120592) (119901120587
119886) (
119902120587
119886)
2
]
11988621= 11988612sinh(
120573120587
119887) + 119896119904
1199091sinh(
120573120587
119887)
11988622= 11988612cosh(
120573120587
119887) + 119896119904
1199091sinh(
120573120587
119887)
11988623= minus11988614sin (119901120587) + 119896119904
1199091cos (119901120587)
11988624= minus11988614cos (119901120587) + 119896119904
1199091sin (119901120587)
11988631= 119863(
120573120587
119886119887)
2
minus 120592119863(119902120587
119887)
2
11988632= 1198961199031199091(120573120587
119886119887)
11988633= minus[119863(
119901120587
119886)
2
+ 120592119863(119902120587
119887)
2
]
11988634= 1198961199031199091(119901120587
119886)
11988641= 11988631cosh(
120573120587
119887) + 119896119903
1199091(120573120587
119886119887) sinh(
120573120587
119887)
11988642= 11988631sinh(
120573120587
119887) + 119896119903
1199091(120573120587
119886119887) cosh(
120573120587
119887)
11988643= 11988633cos (119901120587) minus 119886
34sin (119901120587)
11988644= 11988633sin (119901120587) minus 119886
34cos (119901120587)
(17)
In order to obtain no trivial solution it is necessary topropose that the determinant of (16) is zero so
DetA = 0 997904rArr
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
11988611
11988612
11988613
11988614
11988621
11988622
11988623
11988624
11988631
11988632
11988633
11988634
11988641
11988642
11988643
11988644
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (18)
International Scholarly Research Notices 5
(ii) Second Auxiliary Levy Problem The solution of (9) forthe second auxiliary problem that satisfies the boundaryconditions of (4c) (4d) (5c) and (5d) can be expressed as
119882119898119899(119909 119910) = 119884
119898119899(119910) sin(
119901120587
119886119909) (19)
where119884119898119899(119910) is the eigenmode of the plate in the 119910-direction
of the plateSubstituting (19) into (9) conducts to an ordinary differ-
ential equation for 119884119898119899(119910)
1198894
119884119898119899(119910)
1198891199104minus [2 (
119901120587
119886)
2
+119888119900
119863]1198892
119884119898119899(119910)
1198891199102
minus (119902120587
119887)
2
[(119902120587
119887)
2
+ 2 (119901120587
119886)
2
+119888119900
119863]119884119898119899(119910)
= 0
(20)
The solutions of the characteristic equation of (20) are
119884119898119899(119910) = 119861
1cosh(120579120587
119886119887119910) + 119861
2sinh(120579120587
119886119887119910)
+ 1198613cos(
119902120587
119887119910) + 119861
4sin(
119902120587
119887119910)
(21)
where 120579 = radic211990121198872 + 11990221198862 + (119888119900119886211988721198631205872)
Equation (21) gives the general form of the eigenmode ofthe plate in the 119910-direction
Boundary conditions along 119910-axis permit determiningthe 119861119894coefficients
119887111198611+ 119887121198612+ 119887131198613+ 119887141198614= 0
119887211198611+ 119887221198612+ 119887231198613+ 119887241198614= 0
119887311198611+ 119887321198612+ 119887331198613+ 119887341198614= 0
119887411198611+ 119887421198612+ 119887431198613+ 119887441198614= 0
(22)
Coefficients 119887119894119895were determined analogously to 119886
119894119895
In order to obtain no trivial solution it is necessary topropose that the determinant of (22) is zero so
DetB = 0 997904rArr
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
11988711
11988712
11988713
11988714
11988721
11988722
11988723
11988724
11988731
11988732
11988733
11988734
11988741
11988742
11988743
11988744
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (23)
223 Determination ofModeNumbers To obtain the couples119901 119902 that permit having no trivial solutions the transcen-dental equation system formed by (18) and (23) is solvedThesolution cannot be determined analytically [14] so we usedthe Wolfram Mathematica software version 801 to get thenumerical solutions The triangulation of the systems of twoequations permits determining the119860
119894and119861
119894coefficients after
normalizing 1198601and 119861
1
The natural mode of the plate is therefore given by
119882(119909 119910) =
infin
sum
119898=1
infin
sum
119899=1
119883119898119899(119909) 119884119898119899(119910) (24)
224 Determination of the Time Function 119879119898119899 Suppose the
solution of governing equation (3) is in the form like
119882(119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119882119898119899(119909 119910) 119879
119898119899(119905) (25)
where 119882119898119899
is a function of the spatial coordinates namedmodal function or natural mode of the plate and 119879
119898119899a
function of timeThus for119882
119898119899satisfying (9) the 119879
119898119899(119905) function verifies
the following equation [22 24]
119898119899(119905) + 2120572120596
119898119899119898119899(119905) + 120596
2
119898119899119879119898119899(119905)
=int119886
0
int119887
0
119882(119909 119910) 119901 (119909 119910 119905) 119889119909 119889119910
(120588ℎ + 119898119900) int119886
0
int119887
0
[119882 (119909 119910)]2
119889119909 119889119910
(26)
with 2120572120596119898119899
= 120574ℎ(120588ℎ + 119898119900) and 120572 being the damping ratio
of systemThe corresponding homogeneous solutions of (26) can be
written
1198790119898119899
(119905) = 119890minus120572120596119898119899119905
[119886119898119899
cos (120596119898119899
radic1 minus 1205722119905)
+ 119887119898119899
sin (120596119898119899
radic1 minus 1205722119905)]
(27)
According to the initial conditions defined in (6) 1198790119898119899
(119905) =
119886119898119899
= 119887119898119899
= 0 A particular and the general solution of (26)are both given by [22]
119879119898119899(119905) =
119901119900119884119898119899((12) 119887)
(120588ℎ + 119898119900) 119876119898119899120596119898119899
radic1 minus 1205722
sdot int
119905
0
[(1 +1
2cos (120596120591))119883
119898119899(1
2acc sdot 1205912 + V
119900sdot 120591)
sdot 119890minus120572sdot120596119898119899(119905minus120591) sin (120596
119898119899
radic1 minus 1205722 (119905 minus 120591))] 119889120591
(28)
where 119876119898119899
is the normalizing function defined by
119876119898119899= int
119886
0
int
119887
0
[119883119898119899(119909)]2
[119884119898119899(119910)]2
119889119909 119889119910 (29)
Finally the deflection solution of governing equation (3) is inthe form of
119882(119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119883119898119899(119909) 119884119898119899(119910) 119879119898119899(119905) (30)
3 Numerical ApplicationsResults and Discussion
Using the procedure described above a rigid roadway pave-ment subjected to a dynamic traffic load is analyzed In thiswork a finite rectangular plate doweled along its edges isconsidered as shown in Figure 1 The structural propertiesof the plate include the size of 5m times 35m the thicknessof 025m and physical characteristics of the plate like the
6 International Scholarly Research Notices
0
00002
00004
00006
00008
0001
00012
Defl
ectio
n (m
)
0 002 004 006 008 01 012 014 016 018 02Time (s)
Uniform step loadHarmonic load
Figure 2 Variation of the deflection directly under load versus timefor different types of load (119867
119904= 25m)
density of 120588 = 2500 kgsdotmminus3 Poissonrsquos ratio 120592 = 025and the longitudinal elastic modulus 119864119901 = 2410
9 Pa Thedensity of the subgrade is taken equal to 119898 = 1800 kgsdotmminus3with Poissonrsquos ratio 120592
119904= 035 and a longitudinal elastic
modulus 119864 = 50106 Pa Finally the moving load magnitude
is supposed to be 119875119900= 8010
3N and circular frequency120596 = 100 radsdotsminus1 acceleration acc = 2msdotsminus2 and a speedof V119900= 25msdotsminus1 [14] These parameters are typical material
and structural properties of highway and airport pavementsaccording to French Central Laboratory of Bridges andPavements [3] It is also assumed that a damping ratio of thesystem equals 120572 = 10 [14] For comparison purposes threetypes of soil (i) Pasternak soil type (ii) Pasternak-Vlasov soiltype and (iii) Pasternak-Vlasov accounting the soil inertiatype (three-parameter soil type) are considered
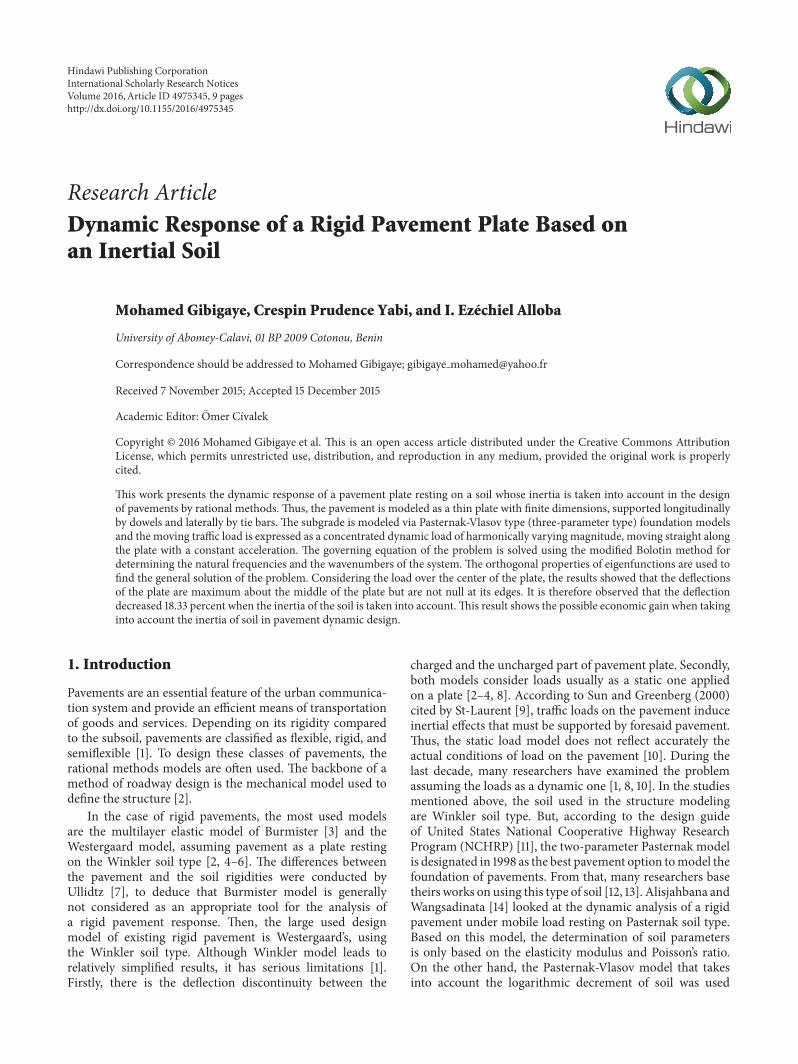
31 Variation of Deflection as a Function of Time Figure 2shows for the three-parameter soil the variation of deflectionunder load as a function of time This figure shows the time-displacement curve for two types of load the uniform stepload and the harmonically load These loads evolve with thesame constant acceleration and initial velocity It is foundthat the deflection of the plate initially greatly increases withrapid oscillations and high amplitude up to the moment119905 = 35 times 10
minus2 s This observation characterizes the transientdomain for both types of load After this phase a stabilizationof the oscillations is noted and the plate enters the stationarydomain In the stationary domain the amplitude of deflectiondoes not vary depending on the time For harmonic loadthe deflection varies harmonically with the time since thisload type is harmonic but for step load the deflectiondoes not vary considerably in stationary domain Yet thedeflection seemed affected by the boundary condition sincethe deflection varies considerably for both types of load whenthe load approaches boundary of the plate The maximum ofdeflection in transient domain appears at time 119905 = 0003 sand this value is 66 percent more than those in stationarydomain which appears at time 119905 = 4120587120596 = 01256 s forharmonic load This shows how it is important to take into
minus00002
0
00002
00004
00006
00008
0001
00012
0 002 004 006 008 01 012 014 016 018 02Time (s)D
eflec
tion
at p
oint
(x=0y=1
75
m)
Figure 3 Variation of the deflection at the fixed point of coordinates(119909 = 0 119910 = 175m) versus time for a dynamically activated soildepth119867
119904= 25m
account the transient domain response in the rigid pavementstructures resistance analysis In the specific case the partof the plate concerned by this deflection is the segment[0 087]m Beyond these points the value of maximumdeflection is 119908 = 0000551479m Besides it is noticed thatthe response of uniform concentrated time step load is lessthan the harmonic loadThat occurs in both transient domainand steady-state domain of plate response
Figure 3 shows the variation of the deflection as a func-tion of time at a fixed point with coordinates 119909 = 0 and119910 = 175m when the load is moving along the central axisof the plate (0 le 119909 le 5m and 119910 = 175m) It is noted thatthemaximumdeflection obtained neighborhood observationpoint along the traveling direction of the load and decreasesin magnitude as well as the load is removingThis shows thatthe maximum deflection occurs near the application point ofthe load
32 Dynamically Activated Soil Depth (119867119904) Effect on Dynamic
Response Based on the data listed above the first five modenumbers of the plate modeling the pavement were deter-mined in the 119909-direction and the first five mode numberswere determined in the 119910-direction We plotted the variationof the deflection curves according to different variables 119909 119910and 119905
Figure 4 shows the variations of the deflection at thecenter of the plate (119909 = 25m 119910 = 175m) depending onthe dynamically activated soil depth for different types of soilwhen the load is located at the center of the plate It can beseen that for the Pasternak soil the value of the deflection ofthe plate is constant (119908 = 0000197106m) whatever the con-sidered depth of the foundation For Pasternak-Vlasov soiltype and three-parameter soil type the deflection increasesto reach a maximum value at a given depth (119867
119904= 40m for
Vlasov soil type with 119908 = 0000192939m and 119867119904= 25m
for three-parameter soil type with 119908 = 0000157565m) Forlower values of 119867
119904up to 119867
119904= 125m the deflection of the
two types of soil is the same After this depth the value ofthe deflection for three-parameter soil type is less than thoseof Vlasov soil typeThe difference between the two responsesincreases with the depth of the dynamically activated soil upto 52 percent at119867
119904= 10m
International Scholarly Research Notices 7
0
000005
00001
000015
00002
Cen
tral
defl
ectio
n (m
)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
0 1 2 3 4 5 6 7 8 9 10Hs (m)
Figure 4 Variation of the deflection in the center of the plate (119909 =25m 119910 = 175m) as a function of the dynamically activated depthof soil at time 119905 = 0099603 s when the load is located at the centerof the plate
0 05 1 15 2 25 3 35 4 45 5Vert
ical
cent
ral d
eflec
tion
(m)
x (m)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
200E minus 04
150E minus 04
100E minus 04
500E minus 05
100E minus 19
minus500E minus 05
Figure 5 Variation of the deflection along the central axis of theplate (0 le 119909 le 5m 119910 = 175m) for different types of soil at time119905 = 0099603 s when the load is located at the center of the plate
It is deduced from these observations that the dynami-cally activated soil depth greatly influences the response ofthe plate We have chosen in this study the depth maximizingthe three-parameter soil type119867
119904= 25m
33 Influence of the Inertia of the Soil on the DynamicResponse Figure 5 shows the changes in the deflection alongthe central axis of the pavement plate (119910 = 175m 0 le
119909 le 5m) for different types of soil at time 119905 = 0099603 swhen the moving load arrived at the center of the plate (119909 =25m and 119910 = 175m) It is noticed that the deflection islarger throughout the plate considering the Pasternak soilcompared to the deflection values for the three-parametersoil The deflections of the plate when the soil is Pasternak-Vlasov type have values between those obtained for the three-parameter soil and Pasternak soil types Taking the values ofthe deflections of the plate on the Pasternak-Vlasov soil type
0000010000200003000040000500006000070000800009
0001
Defl
ectio
n (m
)
20000 40000 60000 80000 100000 120000 1400000Po (kN)
Hs = 10mHs = 75m
Hs = 5mHs = 25mHs = 05m
Figure 6 Variation of the deflection as a function of plate magni-tude for different values of dynamically activated soil depth at time119905 = 01256 s
as a reference it can be seen that the deflections at the centerof the plate are reduced up to 1833 percent The more thedepth119867
119904is the higher the gap is In conclusion inertial soil
greatly reduces (up to 1833) the dynamic response of thepavement plate when the moving load is over the center ofthe plate
34 Effect of the Variation of Load Magnitude on the Displace-ment for Different Values of Dynamically Activated DepthFigure 6 shows the deflection of the plate versus the loadmagnitude for dynamically activated soil depths119867
119904= 05m
25m 5m 75m 10m It is noticed that the displacementincreases linearly with the increase in load magnitudeBesides the increasing of the dynamically activated depthparameter 119867
119904increases the deflection of the plate for low
values of 119867119904 Nevertheless for great values of dynamically
activated load the deflection of the plate is not affected bythe variation of the dynamically activated depth
35 Variation of Displacement at Optimal Time versus SoilParameters for Different Values of 119887119886 Table 1 presents thevalues of displacement under load versus soil parameters fordifferent values of 119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) attime 119905 = 01256 s This table is obtained for plates coveringthe same area The table shows that deflection increases withthe increase in 119887119886 So the deflection is great for square platecompared to the rectangular plateThe size of pavement plateconsiderably affected the displacement of the pavement plateIt is more useful for engineer to design the rigid pavementplate as a rectangular one
4 Conclusion
This paper dealt with some significant results from a studyof the dynamic analysis of rigid pavements The soil modelsused in this work are the well-known Pasternak modelthe Pasternak-Vlasov model which takes into account theinteraction between soil layers and the improved three-parametermodel considering the inertia of the soilThemainconclusions of this study are the following
8 International Scholarly Research Notices
Table 1 Displacement versus soils parameters for different values of119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) at time 119905 = 01256 s
119887119886 119887119886 = 05 119887119886 = 07 119887119886 = 10119867119904= 05119896119900= 1662 times 108
377 times 10minus4m 378 times 10minus4m 573 times 10minus4m119862119900= 2596 times 106
119898119900= 252326
119867119904= 25119896119900= 3325 times 107
527 times 10minus4m 550 times 10minus4m 708 times 10minus4m119862119900= 1298 times 107
119898119900= 126163
119867119904= 5119896119900= 1662 times 107
536 times 10minus4m 58 times 10minus4m 781 times 10minus4m119862119900= 2596 times 107
119898119900= 252326
119867119904= 75119896119900= 1108 times 107
548 times 10minus4m 573 times 10minus4m 848 times 10minus4m119862119900= 3894 times 107
119898119900= 378489
119867119904= 10119896119900= 8311 times 106
513 times 10minus4m 577 times 10minus4m 937 times 10minus4m119862119900= 5192 times 107
119898119900= 504652
(i) The soil inertia influences the pavement response atthe middle of the plate when the load evolving alongits centerline arrived at the center This indicates apossible overdesign of pavements when using thetwo-parameter soil model
(ii) The effect of dynamically activated depth of Pas-ternak-Vlasov soil and three-parameter soil on theresponse is found to be significant for both soilstypes but more for three-parameter type than thePasternak-Vlasov type
(iii) Before the stationary domain of oscillations a tran-sient response of the plate during 35 times 10minus2 secondsis noted The transient response is bigger than thestationary one and it will be necessary to investigatedeeply in further study
(iv) This study only covers plates pavement intercon-nected by dowels and tie bars So we could extend itto continuous pavements plates
(v) This study does not take into account the cyclic effectof the load So the fatigue response of the studiedsystem could be further analyzed
(vi) The resonance is not studied in this work despite theeffect that soil inertia can have in that so we intend tostudy it in further work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] SO Rahman and I Anam ldquoDynamic analysis of concrete pave-ment under moving loadsrdquo Journal of Civil and EnvironmentalEngineering vol 1 no 1 pp 1ndash6 2005
[2] M S Wei Tu ldquoResponse modelling of pavement subjected todynamic surface loading based on stress-based multi-layeredplate theoryrdquo 2007
[3] LCPC Conception et Dimensionnement des Chaussees NeuvesGuide Technique LCPC Ed Ministere de lrsquoEquipement desTransports et du Tourisme Paris France 1994
[4] R L Baus and N R Stires Mechanistic-Empirical PavementDesign Guide University of South Carolina Columbia SouthCarolina 2010
[5] M-H Huang and D P Thambiratnam ldquoDeflection responseof plate on Winkler foundation to moving accelerated loadsrdquoEngineering Structures vol 23 no 9 pp 1134ndash1141 2001
[6] S-M Kirn and JM Roesset ldquoMoving loads on a plate on elasticfoundationrdquo Journal of EngineeringMechanics vol 124 no 9 pp1010ndash1017 1998
[7] P Ullidtz Modelling Flexible Pavement Response and Perfor-mance Technical University of Denmark Polytekn KongensLyngby Denmark 1998
[8] L Sun ldquoSteady-state dynamic response of a Kirchhoff rsquos slabon viscoelastic Kelvinrsquos foundation to moving harmonic loadsrdquoJournal of Applied Mechanics vol 74 no 6 pp 1212ndash1224 2007
[9] D St-Laurent Synthese des Outils deModelisation de ChaussseesActuellement Disponibles au LCPC LCPC Paris France 2008httpwwwlcpcfr
[10] S Lu ldquoAnalytical dynamic displacement response of rigid pave-ments to moving concentrated and line loadsrdquo InternationalJournal of Solids and Structures vol 43 no 14-15 pp 4370ndash43832006
[11] ARA and ERES Division ldquoAppendix QQ structural responsemodels for rigid pavementsrdquo inGuide forMechanistic-EmpiricalDesign of New and Rehabilitated Pavement Structures pp 1ndash91NCHRP Champaign Ill USA 2003
[12] T Nguyen-Thoi H Luong-Van P Phung-Van T Rabczuk andD Tran-Trung ldquoDynamic responses of composite plates on thepasternak foundation subjected to a moving mass by a cell-based smoothed discrete shear gap (CS-FEM-DSG3) methodrdquoInternational Journal of Composite Materials vol 3 no 6 pp19ndash27 2013
[13] C Aron and E Jonas Structural element approaches for soil-structure interaction [MS thesis] Chalmers University of Tech-nology Goteborg Sweden 2012
[14] S Alisjahbana andWWangsadinata ldquoDynamic analysis of rigidroadway pavement under moving traffic loads with variablevelocityrdquo Interaction and Multiscale Mechanics vol 5 no 2 pp105ndash114 2012
[15] S Lu ldquoDynamic displacement response of beam-type structuresto moving line loadsrdquo International Journal of Solids andStructures vol 38 no 48-49 pp 8869ndash8878 2001
[16] O Civalek ldquoNonlinear analysis of thin rectangular plates onWinklerndashPasternak elastic foundations by DSCndashHDQ meth-odsrdquo Applied Mathematical Modelling vol 31 no 3 pp 606ndash624 2007
[17] G Pan and S N Atluri ldquoDynamic response of finite sizedelastic runways subjected tomoving loads a coupledBEMFEMapproachrdquo International Journal for Numerical Methods inEngineering vol 38 no 18 pp 3143ndash3166 1995
International Scholarly Research Notices 9
[18] M Gibigaye Problems of Dynamic Response of Shells Contactingwith an Inertial Medium at a Transient Domain of VibrationsIndustrial Institut of Zaporozhye Zaporozhye Ukraine 1992
[19] Z Dimitrovova ldquoEnhanced formula for a critical velocity ofa uniformly moving loadrdquo in Proceedings of the 6th EuropeanCongress on Computational Methods in Applied Sciences andEngineering (ECCOMAS rsquo12) pp 1ndash10 Vienna Austria Septem-ber 2012
[20] M S Asik ldquoVertical vibration analysis of rigid footings on a soillayer with a rigid baserdquo 1993 httpsrepositoriestdlorgttu-irbitstreamhandle23462010731295007715294pdfsequence
[21] A Turhan A Consistent Vlasov Model for Analysis of Plates onElastic Foundations Using the Finite Element Method GraduateFaculty Texas Tech University Lubbock Tex USA 1992
[22] C Xiang-sheng ldquoDynamic response of plates on elastic foun-dations due to the moving loadsrdquo Applied Mathematics andMechanics vol 8 no 4 pp 355ndash365 1987
[23] V I Samul The Basis of Elasticity and Plasticity TheoriesPedagogic Book for High Schools Students MoscowHigh SchoolMoscow Idaho USA 2nd edition 1982
[24] R Harberman Elementary Applied Partial Differential Equa-tions with Fourier Serie and Boundary Value Problem PrenticeHall Englewood Cliffs NJ USA 2nd edition 1987
[25] S Alisjahbana ldquoDynamic response of clamped orthotropicplates to dynamic moving loadsrdquo in Proceedings of the 13thWorld Conference on Earthquake Engineering VancouverCanada November 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Scholarly Research Notices
by Rahman and Anam [1] using the finite element methodThe study of Rahman also showed that the Pasternak-Vlasovmodel is more economical than that of Winkler and cannotarbitrarily set the values of the intrinsic characteristics of thesoil
In most models used previously the dynamic effect istaken into account only by the inertia of the plate [11 15]Concerning the soil inertia is neglected in dynamicmodelingof pavement structure However Civalek [16] took intoaccount the inertia of the soil but had defined as constantindependents values the intrinsic parameters of soil Heconcluded that the effect of foundation inertia on the centraldeflection of the finite plate is not considerable But accordingto the results of Pan and Atlurirsquos work [17] in engineeringpractice this is still not always the case and this factor mayhave significant effects on the dynamic response of the platemodeling the pavement For these reasons several studieshave tried to modify the Pasternak-Vlasov soil introducingthe inertia of the soil to a depth of soil susceptible todynamic forces applied to the structure Gibigaye in hiswork used an inertia soil model foundation for the studyof the behavior of shells modeling underground shells [18]He concluded that it is important to take into accountthe inertia of the foundation soil on the dynamic responseof civil engineering structures Besides Dimitrovova [19]noted that the classical formula which predicts a criticalvelocity of load significantly is overestimated compared tothe one experienced in reality She indicated that this formulashould be revised by introducing two important notions theeffective finite depth of the foundation that is dynamicallyactivated and the inertial effect of this activated foundationlayer
This work investigates dynamic response of a rigid pave-ment resting on an inertial soil For that the rigid pavementismodeled as a thin plate with dowels and tie bars in its edges
In order to take into account its inertia the soil ismodeledas a three-parameter type (119896
119900119862119900 and119898
119900 resp integral char-
acteristics in compression and in shearing and reduced massof the foundation soil) The boundary conditions of theseplates aremodeled by two linear relationships between strainsand stresses at the plate edges The homogeneous solutionof the problem is achieved by the method of separation ofvariables so that the superposition gives a solution satisfyingthe boundary conditions Since the deformation is expressedas eigenfunctions products the solution of the dynamicproblem is obtained based on the orthogonality propertiesof eigenfunctions The general solution of the problem isobtained from the specific properties of the Dirac deltafunction This paper provides an overview of the dynamicanalysis of rigid pavements response as described above
2 Materials and Methods
21 Governing Equation In this research work an isotropichomogeneous elastic rectangular plate resting on an elasticthree-parameter soil is considered to model a pavement Theadjacent plates are supposed to be joined by dowels and tiebars Based on the work of Asik [20] and Gibigaye work inthe cylindrical axis system [18] the soil response according
to the deflection 119908(119909 119910 119911 119905) at a given point inside the soillayer is equivalent to
119902119904(119909 119910 119911 119905) = 119896
119900119908 (119909 119910 119911 119905) minus 119888
119900nabla2
119908 (119909 119910 119911 119905)
+ 119898119900
1205972
119908 (119909 119910 119911 119905)
1205971199052
(1)
where 119909 119910 119911 and 119905 are space-time coordinates of the soilstudying point 119908(119909 119910 119911 119905) is the deflection inside the soillayer defined as 119908(119909 119910 119911 119905) = 119908(119909 119910 0 119905) sdot 120601(119911) and 120601(119911) =sinh[120574(1 minus 119911119867
119904)]sinh 120574 is a vertical decay function of soil
that must verify 120601(0) = 1 and 120601(119867119904) = 0 119896
119900 119888119900 and
119898119900are respectively integral characteristics in compression
and in shearing and linear reduced mass of the foundationsoil supposed to be homogeneous and monolayer They areexpressed as follows [21]
119896119900=
119864119900
1 minus 1205922119904
int
119867119904
0
[1206011015840
(119911)]2
119889119911
=119864119900
2119867119904(1 minus 1205922
119904)
120574 (120574 + sinh 120574 cosh 120574)(sinh 120574)2
119888119900=
119864119900
2 (1 + 120592119904)int
119867119904
0
[120601 (119911)]2
119889119911
=119864119900119867119904
2 (1 + 120592119904)
120574 (sinh 120574 cosh 120574 minus 120574)120574 (sinh 120574)2
119898119900= 119898int
119867119904
0
[120601 (119911)]2
119889119911 =119898119867119904(sinh 120574 cosh 120574 minus 120574)2120574 (sinh 120574)2
(2)
where 119867119904is the effective finite depth of the foundation that
is dynamically activated 119898 is the density of the subgrade 120574is a constant named logarithmic decrement of the soil whichdeterminates the rate of decrease of the deflections dependingon the depth 119864
119900is Youngrsquos Modulus 120592 is Poissonrsquos ratio
According to the classic theory of thin plates and iftaking into account the reduced mass of soil the transversedeflection of the Kirchhoff plate satisfies the following partialdifferential equation
119863nabla4
119908 (119909 119910 119905) + 119896119900119908 (119909 119910 119905) minus 119888
119900nabla2
119908 (119909 119910 119905)
+ 120574ℎ120597119908 (119909 119910 119905)
120597119905+ (120588ℎ + 119898
119900)1205972
119908 (119909 119910 119905)
1205971199052
= 119901 (119909 119910 119905)
(3)
119908(119909 119910 119905) = 119908(119909 119910 0 119905) is the deflection of Kirchhoff platewhich is equal to the deflection of the platesoil interface
119901(119909 119910 119905) = 119901119900[1 + (12) cos(120596 sdot 119905)]120575[119909 minus 119909(119905)]120575[119910 minus 119910(119905)]
is the load transmitted to the pavement [14] Here 119909(119905) =
V119900119905 + (12)acc(1199052) 119910(119905) = (12)119887 are the geometrical position
of load at the time 119905 119901119900is the magnitude of the moving
wheel load acc is the acceleration of the load120596 is the angularfrequency of the applied load 120575 is theDirac function 119886 119887 andℎ are the dimensions of the finite plate and 119863 is the flexuralstiffness of the plate
International Scholarly Research Notices 3
h
h
Edge vertical translational restriction
Edge verticalrotational restriction
Tie barsa
b
Dowels
O
y
x
p(x y t)
Spring layer koShear layer co
y(t) =1
2b
x(t) =1
2acc middot t2 + ot
Figure 1 Modeling of doweled rigid pavement under moving load[14]
The boundary conditions (Figure 1) are modeled as fol-lows
(i) The restriction of the elastic vertical translation ischaracterized by the four equations [14]
119881119909=0
= minus119863[1205973
119908 (0 119910 119905)
1205971199093+ (2 minus 120592)
1205973
119908 (0 119910 119905)
1205971199091205971199102]
= 1198961199041199091119908 (0 119910 119905)
(4a)
119881119909=119886
= minus119863[1205973
119908 (119886 119910 119905)
1205971199093+ (2 minus 120592)
1205973
119908 (119886 119910 119905)
1205971199091205971199102]
= 1198961199041199092119908 (119886 119910 119905)
(4b)
119881119910=0
= minus119863[1205973
119908 (119909 0 119905)
1205971199103+ (2 minus 120592)
1205973
119908 (119909 0 119905)
1205971199101205971199092]
= 1198961199041199101119908 (119909 0 119905)
(4c)
119881119910=119887
= minus119863[1205973
119908 (119909 119887 119905)
1205971199103+ (2 minus 120592)
1205973
119908 (119909 119887 119905)
1205971199101205971199092]
= 1198961199041199102119908 (119909 119887 119905)
(4d)
where 1198961199041199091 1198961199041199092 1198961199041199101 and 119896119904
1199102are the elastic vertical
translation stiffness and 119881119909 119881119910are the vertical shear forces
of the plate
(ii) The restriction of the elastic rotation is characterizedby the following four equations [14]
119872119909=0
= minus119863[1205972
119908 (0 119910 119905)
1205971199092+ 120592
1205972
119908 (0 119910 119905)
1205971199102]
= 1198961199031199091
120597nabla2
119908 (0 119910 119905)
120597119909
(5a)
119872119909=119886
= minus119863[1205972
119908 (119886 119910 119905)
1205971199092+ 120592
1205972
119908 (119886 119910 119905)
1205971199102]
= 1198961199031199092
120597nabla2
119908 (119886 119910 119905)
120597119909
(5b)
119872119910=0
= minus119863[1205972
119908 (119909 0 119905)
1205971199102+ 120592
1205972
119908 (119909 0 119905)
1205971199092]
= 1198961199031199101
120597nabla2
119908 (119909 0 119905)
120597119910
(5c)
119872119910=119887
= minus119863[1205972
119908 (119909 119887 119905)
1205971199102+ 120592
1205972
119908 (119909 119887 119905)
1205971199092]
= 1198961199031199102
120597nabla2
119908 (119909 119887 119905)
120597119910
(5d)
where 1198961199031199091 1198961199031199092 1198961199031199101 and 119896119903
1199102are the elastic rotational
stiffness and119872119909119872119910are the bending moments of the finite
plateThe initial conditions (119905 = 0 s) are
120597119908 (119909 119910 0)
120597119905= 119908 (119909 119910 0) = 0 (6)
22 Resolution of the Problem
221 Determination of the Eigenfrequencies In order to solvegoverning equation (3) of the problem it is assumed that theprincipal elastic axes of the plate are parallel to its edges Thefree vibrations solution of the problem is set as [14 20]
119908 (119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119882119898119899(119909 119910) sin (120596
119898119899119905) (7)
120596119898119899
is the circular frequency of plate and 119882119898119899
is thefunction of position coordinates determined for the modenumbers 119898 and 119899 in 119909- and 119910-directions This form satisfiesthe initial conditions and the undamped free vibrationsequationTherefore natural modes satisfy the equation below[22]
119863nabla4
119908 (119909 119910 119905) + 119896119900119908 (119909 119910 119905) minus 119888
119900nabla2
119908 (119909 119910 119905)
+ (120588ℎ + 119898119900)1205972
119908 (119909 119910 119905)
1205971199052= 0
(8)
Equation (7) in (8) gives
119863nabla4
119882119898119899minus (120588ℎ + 119898
119900) 1205962
119898119899119882119898119899+ 119896119900119882119898119899minus 119888119900nabla2
119882119898119899
= 0
(9)
4 International Scholarly Research Notices
This equation is independent of time as the function119882119898119899
Such a problem has solutions which may be in Navierrsquos form[23 24]
119882119898119899(119909 119910) = 119860
119898119899sin(
119901120587
119886119909) sin(
119902120587
119887119910) (10)
Here119901 and 119902 aremode numbers of the plateThey are realnumbers because of the boundary conditions of the problem[14 22 25] and 119898 119899 are their respective roundness to thenearest integer number The eigenfrequencies solutions of(9) are for the first auxiliary problem those which satisfyboundary conditions (5a) (5b) (5c) and (5d)
1205962
119898119899=
1198631205874
120588ℎ + 119898119900
[(119901
119886)
4
+ 2 (119901119902
119886119887)
2
+ (119902
119887)
4
]
+119896119900
120588ℎ + 119898119900
+119888119900
120588ℎ + 119898119900
[(119901120587
119886)
2
+ (119902120587
119887)
2
]
(11)
222 Determination of Eigenmodes of the Plate To obtainthe mode numbers 119901 and 119902 and the eigenfunctions modifiedBolotin method is used This consists of the resolution of thetwo auxiliary Levyrsquos problems That can permit determiningthe eigenmode of the plate
(i) First Auxiliary Levy Problem The solution of (9) for thefirst auxiliary problem that satisfies the boundary conditionsof (4a) (4b) (5a) and (5b) can be expressed as
119882119898119899(119909 119910) = 119883
119898119899(119909) sin(
119902120587
119887119910) (12)
where119883119898119899(119909) is the eigenmode of the plate in the119909-direction
Substituting (12) into (9) we obtain an ordinary differen-tial equation for119883
119898119899(119910)
1198894
119883119898119899(119909)
1198891199094minus [2 (
119902120587
119887)
2
+119888119900
119863]1198892
119883119898119899(119909)
1198891199092
minus (119901120587
119886)
2
[(119901120587
119886)
2
+ 2 (119902120587
119887)
2
+119888119900
119863]119883119898119899(119909)
= 0
(13)
The solutions of the characteristic equation of (13) are
12058212= plusmn
120587
119886119887
radic211990221198862 + 11990121198872 +1198881199001198862
1198872
1198631205872
12058234= plusmn
119901120587
119886119894
(14)
For 120573 = radic211990221198862 + 11990121198872 + (119888119900119886211988721198631205872)119883(119909) becomes
119883119898119899(119909) = 119860
1cosh(
120573120587
119886119887119909) + 119860
2sinh(
120573120587
119886119887119909)
+ 1198603cos(
119901120587
119886119909) + 119860
4sin(
119901120587
119886119909)
(15)
Equation (15) gives the general form of the eigenmode ofthe plate in the 119909-direction
Boundary conditions along 119909-axis permit determiningthe 119860
119894coefficients
119886111198601+ 119886121198602+ 119886131198603+ 119886141198604= 0
119886211198601+ 119886221198602+ 119886231198603+ 119886241198604= 0
119886311198601+ 119886321198602+ 119886331198603+ 119886341198604= 0
119886411198601+ 119886421198602+ 119886431198603+ 119886441198604= 0
(16)
where 119886119894119895coefficients are given by
11988611= 1198961199041199091
11988612= 119863(
120573120587
119886)
3
minus 119863(120573120587
119886119887)(
119902120587
119886)
2
11988613= 1198961199041199091
11988614= minus119863[(
119901120587
119886)
3
+ (2 minus 120592) (119901120587
119886) (
119902120587
119886)
2
]
11988621= 11988612sinh(
120573120587
119887) + 119896119904
1199091sinh(
120573120587
119887)
11988622= 11988612cosh(
120573120587
119887) + 119896119904
1199091sinh(
120573120587
119887)
11988623= minus11988614sin (119901120587) + 119896119904
1199091cos (119901120587)
11988624= minus11988614cos (119901120587) + 119896119904
1199091sin (119901120587)
11988631= 119863(
120573120587
119886119887)
2
minus 120592119863(119902120587
119887)
2
11988632= 1198961199031199091(120573120587
119886119887)
11988633= minus[119863(
119901120587
119886)
2
+ 120592119863(119902120587
119887)
2
]
11988634= 1198961199031199091(119901120587
119886)
11988641= 11988631cosh(
120573120587
119887) + 119896119903
1199091(120573120587
119886119887) sinh(
120573120587
119887)
11988642= 11988631sinh(
120573120587
119887) + 119896119903
1199091(120573120587
119886119887) cosh(
120573120587
119887)
11988643= 11988633cos (119901120587) minus 119886
34sin (119901120587)
11988644= 11988633sin (119901120587) minus 119886
34cos (119901120587)
(17)
In order to obtain no trivial solution it is necessary topropose that the determinant of (16) is zero so
DetA = 0 997904rArr
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
11988611
11988612
11988613
11988614
11988621
11988622
11988623
11988624
11988631
11988632
11988633
11988634
11988641
11988642
11988643
11988644
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (18)
International Scholarly Research Notices 5
(ii) Second Auxiliary Levy Problem The solution of (9) forthe second auxiliary problem that satisfies the boundaryconditions of (4c) (4d) (5c) and (5d) can be expressed as
119882119898119899(119909 119910) = 119884
119898119899(119910) sin(
119901120587
119886119909) (19)
where119884119898119899(119910) is the eigenmode of the plate in the 119910-direction
of the plateSubstituting (19) into (9) conducts to an ordinary differ-
ential equation for 119884119898119899(119910)
1198894
119884119898119899(119910)
1198891199104minus [2 (
119901120587
119886)
2
+119888119900
119863]1198892
119884119898119899(119910)
1198891199102
minus (119902120587
119887)
2
[(119902120587
119887)
2
+ 2 (119901120587
119886)
2
+119888119900
119863]119884119898119899(119910)
= 0
(20)
The solutions of the characteristic equation of (20) are
119884119898119899(119910) = 119861
1cosh(120579120587
119886119887119910) + 119861
2sinh(120579120587
119886119887119910)
+ 1198613cos(
119902120587
119887119910) + 119861
4sin(
119902120587
119887119910)
(21)
where 120579 = radic211990121198872 + 11990221198862 + (119888119900119886211988721198631205872)
Equation (21) gives the general form of the eigenmode ofthe plate in the 119910-direction
Boundary conditions along 119910-axis permit determiningthe 119861119894coefficients
119887111198611+ 119887121198612+ 119887131198613+ 119887141198614= 0
119887211198611+ 119887221198612+ 119887231198613+ 119887241198614= 0
119887311198611+ 119887321198612+ 119887331198613+ 119887341198614= 0
119887411198611+ 119887421198612+ 119887431198613+ 119887441198614= 0
(22)
Coefficients 119887119894119895were determined analogously to 119886
119894119895
In order to obtain no trivial solution it is necessary topropose that the determinant of (22) is zero so
DetB = 0 997904rArr
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
11988711
11988712
11988713
11988714
11988721
11988722
11988723
11988724
11988731
11988732
11988733
11988734
11988741
11988742
11988743
11988744
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (23)
223 Determination ofModeNumbers To obtain the couples119901 119902 that permit having no trivial solutions the transcen-dental equation system formed by (18) and (23) is solvedThesolution cannot be determined analytically [14] so we usedthe Wolfram Mathematica software version 801 to get thenumerical solutions The triangulation of the systems of twoequations permits determining the119860
119894and119861
119894coefficients after
normalizing 1198601and 119861
1
The natural mode of the plate is therefore given by
119882(119909 119910) =
infin
sum
119898=1
infin
sum
119899=1
119883119898119899(119909) 119884119898119899(119910) (24)
224 Determination of the Time Function 119879119898119899 Suppose the
solution of governing equation (3) is in the form like
119882(119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119882119898119899(119909 119910) 119879
119898119899(119905) (25)
where 119882119898119899
is a function of the spatial coordinates namedmodal function or natural mode of the plate and 119879
119898119899a
function of timeThus for119882
119898119899satisfying (9) the 119879
119898119899(119905) function verifies
the following equation [22 24]
119898119899(119905) + 2120572120596
119898119899119898119899(119905) + 120596
2
119898119899119879119898119899(119905)
=int119886
0
int119887
0
119882(119909 119910) 119901 (119909 119910 119905) 119889119909 119889119910
(120588ℎ + 119898119900) int119886
0
int119887
0
[119882 (119909 119910)]2
119889119909 119889119910
(26)
with 2120572120596119898119899
= 120574ℎ(120588ℎ + 119898119900) and 120572 being the damping ratio
of systemThe corresponding homogeneous solutions of (26) can be
written
1198790119898119899
(119905) = 119890minus120572120596119898119899119905
[119886119898119899
cos (120596119898119899
radic1 minus 1205722119905)
+ 119887119898119899
sin (120596119898119899
radic1 minus 1205722119905)]
(27)
According to the initial conditions defined in (6) 1198790119898119899
(119905) =
119886119898119899
= 119887119898119899
= 0 A particular and the general solution of (26)are both given by [22]
119879119898119899(119905) =
119901119900119884119898119899((12) 119887)
(120588ℎ + 119898119900) 119876119898119899120596119898119899
radic1 minus 1205722
sdot int
119905
0
[(1 +1
2cos (120596120591))119883
119898119899(1
2acc sdot 1205912 + V
119900sdot 120591)
sdot 119890minus120572sdot120596119898119899(119905minus120591) sin (120596
119898119899
radic1 minus 1205722 (119905 minus 120591))] 119889120591
(28)
where 119876119898119899
is the normalizing function defined by
119876119898119899= int
119886
0
int
119887
0
[119883119898119899(119909)]2
[119884119898119899(119910)]2
119889119909 119889119910 (29)
Finally the deflection solution of governing equation (3) is inthe form of
119882(119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119883119898119899(119909) 119884119898119899(119910) 119879119898119899(119905) (30)
3 Numerical ApplicationsResults and Discussion
Using the procedure described above a rigid roadway pave-ment subjected to a dynamic traffic load is analyzed In thiswork a finite rectangular plate doweled along its edges isconsidered as shown in Figure 1 The structural propertiesof the plate include the size of 5m times 35m the thicknessof 025m and physical characteristics of the plate like the
6 International Scholarly Research Notices
0
00002
00004
00006
00008
0001
00012
Defl
ectio
n (m
)
0 002 004 006 008 01 012 014 016 018 02Time (s)
Uniform step loadHarmonic load
Figure 2 Variation of the deflection directly under load versus timefor different types of load (119867
119904= 25m)
density of 120588 = 2500 kgsdotmminus3 Poissonrsquos ratio 120592 = 025and the longitudinal elastic modulus 119864119901 = 2410
9 Pa Thedensity of the subgrade is taken equal to 119898 = 1800 kgsdotmminus3with Poissonrsquos ratio 120592
119904= 035 and a longitudinal elastic
modulus 119864 = 50106 Pa Finally the moving load magnitude
is supposed to be 119875119900= 8010
3N and circular frequency120596 = 100 radsdotsminus1 acceleration acc = 2msdotsminus2 and a speedof V119900= 25msdotsminus1 [14] These parameters are typical material
and structural properties of highway and airport pavementsaccording to French Central Laboratory of Bridges andPavements [3] It is also assumed that a damping ratio of thesystem equals 120572 = 10 [14] For comparison purposes threetypes of soil (i) Pasternak soil type (ii) Pasternak-Vlasov soiltype and (iii) Pasternak-Vlasov accounting the soil inertiatype (three-parameter soil type) are considered
31 Variation of Deflection as a Function of Time Figure 2shows for the three-parameter soil the variation of deflectionunder load as a function of time This figure shows the time-displacement curve for two types of load the uniform stepload and the harmonically load These loads evolve with thesame constant acceleration and initial velocity It is foundthat the deflection of the plate initially greatly increases withrapid oscillations and high amplitude up to the moment119905 = 35 times 10
minus2 s This observation characterizes the transientdomain for both types of load After this phase a stabilizationof the oscillations is noted and the plate enters the stationarydomain In the stationary domain the amplitude of deflectiondoes not vary depending on the time For harmonic loadthe deflection varies harmonically with the time since thisload type is harmonic but for step load the deflectiondoes not vary considerably in stationary domain Yet thedeflection seemed affected by the boundary condition sincethe deflection varies considerably for both types of load whenthe load approaches boundary of the plate The maximum ofdeflection in transient domain appears at time 119905 = 0003 sand this value is 66 percent more than those in stationarydomain which appears at time 119905 = 4120587120596 = 01256 s forharmonic load This shows how it is important to take into
minus00002
0
00002
00004
00006
00008
0001
00012
0 002 004 006 008 01 012 014 016 018 02Time (s)D
eflec
tion
at p
oint
(x=0y=1
75
m)
Figure 3 Variation of the deflection at the fixed point of coordinates(119909 = 0 119910 = 175m) versus time for a dynamically activated soildepth119867
119904= 25m
account the transient domain response in the rigid pavementstructures resistance analysis In the specific case the partof the plate concerned by this deflection is the segment[0 087]m Beyond these points the value of maximumdeflection is 119908 = 0000551479m Besides it is noticed thatthe response of uniform concentrated time step load is lessthan the harmonic loadThat occurs in both transient domainand steady-state domain of plate response
Figure 3 shows the variation of the deflection as a func-tion of time at a fixed point with coordinates 119909 = 0 and119910 = 175m when the load is moving along the central axisof the plate (0 le 119909 le 5m and 119910 = 175m) It is noted thatthemaximumdeflection obtained neighborhood observationpoint along the traveling direction of the load and decreasesin magnitude as well as the load is removingThis shows thatthe maximum deflection occurs near the application point ofthe load
32 Dynamically Activated Soil Depth (119867119904) Effect on Dynamic
Response Based on the data listed above the first five modenumbers of the plate modeling the pavement were deter-mined in the 119909-direction and the first five mode numberswere determined in the 119910-direction We plotted the variationof the deflection curves according to different variables 119909 119910and 119905
Figure 4 shows the variations of the deflection at thecenter of the plate (119909 = 25m 119910 = 175m) depending onthe dynamically activated soil depth for different types of soilwhen the load is located at the center of the plate It can beseen that for the Pasternak soil the value of the deflection ofthe plate is constant (119908 = 0000197106m) whatever the con-sidered depth of the foundation For Pasternak-Vlasov soiltype and three-parameter soil type the deflection increasesto reach a maximum value at a given depth (119867
119904= 40m for
Vlasov soil type with 119908 = 0000192939m and 119867119904= 25m
for three-parameter soil type with 119908 = 0000157565m) Forlower values of 119867
119904up to 119867
119904= 125m the deflection of the
two types of soil is the same After this depth the value ofthe deflection for three-parameter soil type is less than thoseof Vlasov soil typeThe difference between the two responsesincreases with the depth of the dynamically activated soil upto 52 percent at119867
119904= 10m
International Scholarly Research Notices 7
0
000005
00001
000015
00002
Cen
tral
defl
ectio
n (m
)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
0 1 2 3 4 5 6 7 8 9 10Hs (m)
Figure 4 Variation of the deflection in the center of the plate (119909 =25m 119910 = 175m) as a function of the dynamically activated depthof soil at time 119905 = 0099603 s when the load is located at the centerof the plate
0 05 1 15 2 25 3 35 4 45 5Vert
ical
cent
ral d
eflec
tion
(m)
x (m)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
200E minus 04
150E minus 04
100E minus 04
500E minus 05
100E minus 19
minus500E minus 05
Figure 5 Variation of the deflection along the central axis of theplate (0 le 119909 le 5m 119910 = 175m) for different types of soil at time119905 = 0099603 s when the load is located at the center of the plate
It is deduced from these observations that the dynami-cally activated soil depth greatly influences the response ofthe plate We have chosen in this study the depth maximizingthe three-parameter soil type119867
119904= 25m
33 Influence of the Inertia of the Soil on the DynamicResponse Figure 5 shows the changes in the deflection alongthe central axis of the pavement plate (119910 = 175m 0 le
119909 le 5m) for different types of soil at time 119905 = 0099603 swhen the moving load arrived at the center of the plate (119909 =25m and 119910 = 175m) It is noticed that the deflection islarger throughout the plate considering the Pasternak soilcompared to the deflection values for the three-parametersoil The deflections of the plate when the soil is Pasternak-Vlasov type have values between those obtained for the three-parameter soil and Pasternak soil types Taking the values ofthe deflections of the plate on the Pasternak-Vlasov soil type
0000010000200003000040000500006000070000800009
0001
Defl
ectio
n (m
)
20000 40000 60000 80000 100000 120000 1400000Po (kN)
Hs = 10mHs = 75m
Hs = 5mHs = 25mHs = 05m
Figure 6 Variation of the deflection as a function of plate magni-tude for different values of dynamically activated soil depth at time119905 = 01256 s
as a reference it can be seen that the deflections at the centerof the plate are reduced up to 1833 percent The more thedepth119867
119904is the higher the gap is In conclusion inertial soil
greatly reduces (up to 1833) the dynamic response of thepavement plate when the moving load is over the center ofthe plate
34 Effect of the Variation of Load Magnitude on the Displace-ment for Different Values of Dynamically Activated DepthFigure 6 shows the deflection of the plate versus the loadmagnitude for dynamically activated soil depths119867
119904= 05m
25m 5m 75m 10m It is noticed that the displacementincreases linearly with the increase in load magnitudeBesides the increasing of the dynamically activated depthparameter 119867
119904increases the deflection of the plate for low
values of 119867119904 Nevertheless for great values of dynamically
activated load the deflection of the plate is not affected bythe variation of the dynamically activated depth
35 Variation of Displacement at Optimal Time versus SoilParameters for Different Values of 119887119886 Table 1 presents thevalues of displacement under load versus soil parameters fordifferent values of 119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) attime 119905 = 01256 s This table is obtained for plates coveringthe same area The table shows that deflection increases withthe increase in 119887119886 So the deflection is great for square platecompared to the rectangular plateThe size of pavement plateconsiderably affected the displacement of the pavement plateIt is more useful for engineer to design the rigid pavementplate as a rectangular one
4 Conclusion
This paper dealt with some significant results from a studyof the dynamic analysis of rigid pavements The soil modelsused in this work are the well-known Pasternak modelthe Pasternak-Vlasov model which takes into account theinteraction between soil layers and the improved three-parametermodel considering the inertia of the soilThemainconclusions of this study are the following
8 International Scholarly Research Notices
Table 1 Displacement versus soils parameters for different values of119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) at time 119905 = 01256 s
119887119886 119887119886 = 05 119887119886 = 07 119887119886 = 10119867119904= 05119896119900= 1662 times 108
377 times 10minus4m 378 times 10minus4m 573 times 10minus4m119862119900= 2596 times 106
119898119900= 252326
119867119904= 25119896119900= 3325 times 107
527 times 10minus4m 550 times 10minus4m 708 times 10minus4m119862119900= 1298 times 107
119898119900= 126163
119867119904= 5119896119900= 1662 times 107
536 times 10minus4m 58 times 10minus4m 781 times 10minus4m119862119900= 2596 times 107
119898119900= 252326
119867119904= 75119896119900= 1108 times 107
548 times 10minus4m 573 times 10minus4m 848 times 10minus4m119862119900= 3894 times 107
119898119900= 378489
119867119904= 10119896119900= 8311 times 106
513 times 10minus4m 577 times 10minus4m 937 times 10minus4m119862119900= 5192 times 107
119898119900= 504652
(i) The soil inertia influences the pavement response atthe middle of the plate when the load evolving alongits centerline arrived at the center This indicates apossible overdesign of pavements when using thetwo-parameter soil model
(ii) The effect of dynamically activated depth of Pas-ternak-Vlasov soil and three-parameter soil on theresponse is found to be significant for both soilstypes but more for three-parameter type than thePasternak-Vlasov type
(iii) Before the stationary domain of oscillations a tran-sient response of the plate during 35 times 10minus2 secondsis noted The transient response is bigger than thestationary one and it will be necessary to investigatedeeply in further study
(iv) This study only covers plates pavement intercon-nected by dowels and tie bars So we could extend itto continuous pavements plates
(v) This study does not take into account the cyclic effectof the load So the fatigue response of the studiedsystem could be further analyzed
(vi) The resonance is not studied in this work despite theeffect that soil inertia can have in that so we intend tostudy it in further work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] SO Rahman and I Anam ldquoDynamic analysis of concrete pave-ment under moving loadsrdquo Journal of Civil and EnvironmentalEngineering vol 1 no 1 pp 1ndash6 2005
[2] M S Wei Tu ldquoResponse modelling of pavement subjected todynamic surface loading based on stress-based multi-layeredplate theoryrdquo 2007
[3] LCPC Conception et Dimensionnement des Chaussees NeuvesGuide Technique LCPC Ed Ministere de lrsquoEquipement desTransports et du Tourisme Paris France 1994
[4] R L Baus and N R Stires Mechanistic-Empirical PavementDesign Guide University of South Carolina Columbia SouthCarolina 2010
[5] M-H Huang and D P Thambiratnam ldquoDeflection responseof plate on Winkler foundation to moving accelerated loadsrdquoEngineering Structures vol 23 no 9 pp 1134ndash1141 2001
[6] S-M Kirn and JM Roesset ldquoMoving loads on a plate on elasticfoundationrdquo Journal of EngineeringMechanics vol 124 no 9 pp1010ndash1017 1998
[7] P Ullidtz Modelling Flexible Pavement Response and Perfor-mance Technical University of Denmark Polytekn KongensLyngby Denmark 1998
[8] L Sun ldquoSteady-state dynamic response of a Kirchhoff rsquos slabon viscoelastic Kelvinrsquos foundation to moving harmonic loadsrdquoJournal of Applied Mechanics vol 74 no 6 pp 1212ndash1224 2007
[9] D St-Laurent Synthese des Outils deModelisation de ChaussseesActuellement Disponibles au LCPC LCPC Paris France 2008httpwwwlcpcfr
[10] S Lu ldquoAnalytical dynamic displacement response of rigid pave-ments to moving concentrated and line loadsrdquo InternationalJournal of Solids and Structures vol 43 no 14-15 pp 4370ndash43832006
[11] ARA and ERES Division ldquoAppendix QQ structural responsemodels for rigid pavementsrdquo inGuide forMechanistic-EmpiricalDesign of New and Rehabilitated Pavement Structures pp 1ndash91NCHRP Champaign Ill USA 2003
[12] T Nguyen-Thoi H Luong-Van P Phung-Van T Rabczuk andD Tran-Trung ldquoDynamic responses of composite plates on thepasternak foundation subjected to a moving mass by a cell-based smoothed discrete shear gap (CS-FEM-DSG3) methodrdquoInternational Journal of Composite Materials vol 3 no 6 pp19ndash27 2013
[13] C Aron and E Jonas Structural element approaches for soil-structure interaction [MS thesis] Chalmers University of Tech-nology Goteborg Sweden 2012
[14] S Alisjahbana andWWangsadinata ldquoDynamic analysis of rigidroadway pavement under moving traffic loads with variablevelocityrdquo Interaction and Multiscale Mechanics vol 5 no 2 pp105ndash114 2012
[15] S Lu ldquoDynamic displacement response of beam-type structuresto moving line loadsrdquo International Journal of Solids andStructures vol 38 no 48-49 pp 8869ndash8878 2001
[16] O Civalek ldquoNonlinear analysis of thin rectangular plates onWinklerndashPasternak elastic foundations by DSCndashHDQ meth-odsrdquo Applied Mathematical Modelling vol 31 no 3 pp 606ndash624 2007
[17] G Pan and S N Atluri ldquoDynamic response of finite sizedelastic runways subjected tomoving loads a coupledBEMFEMapproachrdquo International Journal for Numerical Methods inEngineering vol 38 no 18 pp 3143ndash3166 1995
International Scholarly Research Notices 9
[18] M Gibigaye Problems of Dynamic Response of Shells Contactingwith an Inertial Medium at a Transient Domain of VibrationsIndustrial Institut of Zaporozhye Zaporozhye Ukraine 1992
[19] Z Dimitrovova ldquoEnhanced formula for a critical velocity ofa uniformly moving loadrdquo in Proceedings of the 6th EuropeanCongress on Computational Methods in Applied Sciences andEngineering (ECCOMAS rsquo12) pp 1ndash10 Vienna Austria Septem-ber 2012
[20] M S Asik ldquoVertical vibration analysis of rigid footings on a soillayer with a rigid baserdquo 1993 httpsrepositoriestdlorgttu-irbitstreamhandle23462010731295007715294pdfsequence
[21] A Turhan A Consistent Vlasov Model for Analysis of Plates onElastic Foundations Using the Finite Element Method GraduateFaculty Texas Tech University Lubbock Tex USA 1992
[22] C Xiang-sheng ldquoDynamic response of plates on elastic foun-dations due to the moving loadsrdquo Applied Mathematics andMechanics vol 8 no 4 pp 355ndash365 1987
[23] V I Samul The Basis of Elasticity and Plasticity TheoriesPedagogic Book for High Schools Students MoscowHigh SchoolMoscow Idaho USA 2nd edition 1982
[24] R Harberman Elementary Applied Partial Differential Equa-tions with Fourier Serie and Boundary Value Problem PrenticeHall Englewood Cliffs NJ USA 2nd edition 1987
[25] S Alisjahbana ldquoDynamic response of clamped orthotropicplates to dynamic moving loadsrdquo in Proceedings of the 13thWorld Conference on Earthquake Engineering VancouverCanada November 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Scholarly Research Notices 3
h
h
Edge vertical translational restriction
Edge verticalrotational restriction
Tie barsa
b
Dowels
O
y
x
p(x y t)
Spring layer koShear layer co
y(t) =1
2b
x(t) =1
2acc middot t2 + ot
Figure 1 Modeling of doweled rigid pavement under moving load[14]
The boundary conditions (Figure 1) are modeled as fol-lows
(i) The restriction of the elastic vertical translation ischaracterized by the four equations [14]
119881119909=0
= minus119863[1205973
119908 (0 119910 119905)
1205971199093+ (2 minus 120592)
1205973
119908 (0 119910 119905)
1205971199091205971199102]
= 1198961199041199091119908 (0 119910 119905)
(4a)
119881119909=119886
= minus119863[1205973
119908 (119886 119910 119905)
1205971199093+ (2 minus 120592)
1205973
119908 (119886 119910 119905)
1205971199091205971199102]
= 1198961199041199092119908 (119886 119910 119905)
(4b)
119881119910=0
= minus119863[1205973
119908 (119909 0 119905)
1205971199103+ (2 minus 120592)
1205973
119908 (119909 0 119905)
1205971199101205971199092]
= 1198961199041199101119908 (119909 0 119905)
(4c)
119881119910=119887
= minus119863[1205973
119908 (119909 119887 119905)
1205971199103+ (2 minus 120592)
1205973
119908 (119909 119887 119905)
1205971199101205971199092]
= 1198961199041199102119908 (119909 119887 119905)
(4d)
where 1198961199041199091 1198961199041199092 1198961199041199101 and 119896119904
1199102are the elastic vertical
translation stiffness and 119881119909 119881119910are the vertical shear forces
of the plate
(ii) The restriction of the elastic rotation is characterizedby the following four equations [14]
119872119909=0
= minus119863[1205972
119908 (0 119910 119905)
1205971199092+ 120592
1205972
119908 (0 119910 119905)
1205971199102]
= 1198961199031199091
120597nabla2
119908 (0 119910 119905)
120597119909
(5a)
119872119909=119886
= minus119863[1205972
119908 (119886 119910 119905)
1205971199092+ 120592
1205972
119908 (119886 119910 119905)
1205971199102]
= 1198961199031199092
120597nabla2
119908 (119886 119910 119905)
120597119909
(5b)
119872119910=0
= minus119863[1205972
119908 (119909 0 119905)
1205971199102+ 120592
1205972
119908 (119909 0 119905)
1205971199092]
= 1198961199031199101
120597nabla2
119908 (119909 0 119905)
120597119910
(5c)
119872119910=119887
= minus119863[1205972
119908 (119909 119887 119905)
1205971199102+ 120592
1205972
119908 (119909 119887 119905)
1205971199092]
= 1198961199031199102
120597nabla2
119908 (119909 119887 119905)
120597119910
(5d)
where 1198961199031199091 1198961199031199092 1198961199031199101 and 119896119903
1199102are the elastic rotational
stiffness and119872119909119872119910are the bending moments of the finite
plateThe initial conditions (119905 = 0 s) are
120597119908 (119909 119910 0)
120597119905= 119908 (119909 119910 0) = 0 (6)
22 Resolution of the Problem
221 Determination of the Eigenfrequencies In order to solvegoverning equation (3) of the problem it is assumed that theprincipal elastic axes of the plate are parallel to its edges Thefree vibrations solution of the problem is set as [14 20]
119908 (119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119882119898119899(119909 119910) sin (120596
119898119899119905) (7)
120596119898119899
is the circular frequency of plate and 119882119898119899
is thefunction of position coordinates determined for the modenumbers 119898 and 119899 in 119909- and 119910-directions This form satisfiesthe initial conditions and the undamped free vibrationsequationTherefore natural modes satisfy the equation below[22]
119863nabla4
119908 (119909 119910 119905) + 119896119900119908 (119909 119910 119905) minus 119888
119900nabla2
119908 (119909 119910 119905)
+ (120588ℎ + 119898119900)1205972
119908 (119909 119910 119905)
1205971199052= 0
(8)
Equation (7) in (8) gives
119863nabla4
119882119898119899minus (120588ℎ + 119898
119900) 1205962
119898119899119882119898119899+ 119896119900119882119898119899minus 119888119900nabla2
119882119898119899
= 0
(9)
4 International Scholarly Research Notices
This equation is independent of time as the function119882119898119899
Such a problem has solutions which may be in Navierrsquos form[23 24]
119882119898119899(119909 119910) = 119860
119898119899sin(
119901120587
119886119909) sin(
119902120587
119887119910) (10)
Here119901 and 119902 aremode numbers of the plateThey are realnumbers because of the boundary conditions of the problem[14 22 25] and 119898 119899 are their respective roundness to thenearest integer number The eigenfrequencies solutions of(9) are for the first auxiliary problem those which satisfyboundary conditions (5a) (5b) (5c) and (5d)
1205962
119898119899=
1198631205874
120588ℎ + 119898119900
[(119901
119886)
4
+ 2 (119901119902
119886119887)
2
+ (119902
119887)
4
]
+119896119900
120588ℎ + 119898119900
+119888119900
120588ℎ + 119898119900
[(119901120587
119886)
2
+ (119902120587
119887)
2
]
(11)
222 Determination of Eigenmodes of the Plate To obtainthe mode numbers 119901 and 119902 and the eigenfunctions modifiedBolotin method is used This consists of the resolution of thetwo auxiliary Levyrsquos problems That can permit determiningthe eigenmode of the plate
(i) First Auxiliary Levy Problem The solution of (9) for thefirst auxiliary problem that satisfies the boundary conditionsof (4a) (4b) (5a) and (5b) can be expressed as
119882119898119899(119909 119910) = 119883
119898119899(119909) sin(
119902120587
119887119910) (12)
where119883119898119899(119909) is the eigenmode of the plate in the119909-direction
Substituting (12) into (9) we obtain an ordinary differen-tial equation for119883
119898119899(119910)
1198894
119883119898119899(119909)
1198891199094minus [2 (
119902120587
119887)
2
+119888119900
119863]1198892
119883119898119899(119909)
1198891199092
minus (119901120587
119886)
2
[(119901120587
119886)
2
+ 2 (119902120587
119887)
2
+119888119900
119863]119883119898119899(119909)
= 0
(13)
The solutions of the characteristic equation of (13) are
12058212= plusmn
120587
119886119887
radic211990221198862 + 11990121198872 +1198881199001198862
1198872
1198631205872
12058234= plusmn
119901120587
119886119894
(14)
For 120573 = radic211990221198862 + 11990121198872 + (119888119900119886211988721198631205872)119883(119909) becomes
119883119898119899(119909) = 119860
1cosh(
120573120587
119886119887119909) + 119860
2sinh(
120573120587
119886119887119909)
+ 1198603cos(
119901120587
119886119909) + 119860
4sin(
119901120587
119886119909)
(15)
Equation (15) gives the general form of the eigenmode ofthe plate in the 119909-direction
Boundary conditions along 119909-axis permit determiningthe 119860
119894coefficients
119886111198601+ 119886121198602+ 119886131198603+ 119886141198604= 0
119886211198601+ 119886221198602+ 119886231198603+ 119886241198604= 0
119886311198601+ 119886321198602+ 119886331198603+ 119886341198604= 0
119886411198601+ 119886421198602+ 119886431198603+ 119886441198604= 0
(16)
where 119886119894119895coefficients are given by
11988611= 1198961199041199091
11988612= 119863(
120573120587
119886)
3
minus 119863(120573120587
119886119887)(
119902120587
119886)
2
11988613= 1198961199041199091
11988614= minus119863[(
119901120587
119886)
3
+ (2 minus 120592) (119901120587
119886) (
119902120587
119886)
2
]
11988621= 11988612sinh(
120573120587
119887) + 119896119904
1199091sinh(
120573120587
119887)
11988622= 11988612cosh(
120573120587
119887) + 119896119904
1199091sinh(
120573120587
119887)
11988623= minus11988614sin (119901120587) + 119896119904
1199091cos (119901120587)
11988624= minus11988614cos (119901120587) + 119896119904
1199091sin (119901120587)
11988631= 119863(
120573120587
119886119887)
2
minus 120592119863(119902120587
119887)
2
11988632= 1198961199031199091(120573120587
119886119887)
11988633= minus[119863(
119901120587
119886)
2
+ 120592119863(119902120587
119887)
2
]
11988634= 1198961199031199091(119901120587
119886)
11988641= 11988631cosh(
120573120587
119887) + 119896119903
1199091(120573120587
119886119887) sinh(
120573120587
119887)
11988642= 11988631sinh(
120573120587
119887) + 119896119903
1199091(120573120587
119886119887) cosh(
120573120587
119887)
11988643= 11988633cos (119901120587) minus 119886
34sin (119901120587)
11988644= 11988633sin (119901120587) minus 119886
34cos (119901120587)
(17)
In order to obtain no trivial solution it is necessary topropose that the determinant of (16) is zero so
DetA = 0 997904rArr
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
11988611
11988612
11988613
11988614
11988621
11988622
11988623
11988624
11988631
11988632
11988633
11988634
11988641
11988642
11988643
11988644
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (18)
International Scholarly Research Notices 5
(ii) Second Auxiliary Levy Problem The solution of (9) forthe second auxiliary problem that satisfies the boundaryconditions of (4c) (4d) (5c) and (5d) can be expressed as
119882119898119899(119909 119910) = 119884
119898119899(119910) sin(
119901120587
119886119909) (19)
where119884119898119899(119910) is the eigenmode of the plate in the 119910-direction
of the plateSubstituting (19) into (9) conducts to an ordinary differ-
ential equation for 119884119898119899(119910)
1198894
119884119898119899(119910)
1198891199104minus [2 (
119901120587
119886)
2
+119888119900
119863]1198892
119884119898119899(119910)
1198891199102
minus (119902120587
119887)
2
[(119902120587
119887)
2
+ 2 (119901120587
119886)
2
+119888119900
119863]119884119898119899(119910)
= 0
(20)
The solutions of the characteristic equation of (20) are
119884119898119899(119910) = 119861
1cosh(120579120587
119886119887119910) + 119861
2sinh(120579120587
119886119887119910)
+ 1198613cos(
119902120587
119887119910) + 119861
4sin(
119902120587
119887119910)
(21)
where 120579 = radic211990121198872 + 11990221198862 + (119888119900119886211988721198631205872)
Equation (21) gives the general form of the eigenmode ofthe plate in the 119910-direction
Boundary conditions along 119910-axis permit determiningthe 119861119894coefficients
119887111198611+ 119887121198612+ 119887131198613+ 119887141198614= 0
119887211198611+ 119887221198612+ 119887231198613+ 119887241198614= 0
119887311198611+ 119887321198612+ 119887331198613+ 119887341198614= 0
119887411198611+ 119887421198612+ 119887431198613+ 119887441198614= 0
(22)
Coefficients 119887119894119895were determined analogously to 119886
119894119895
In order to obtain no trivial solution it is necessary topropose that the determinant of (22) is zero so
DetB = 0 997904rArr
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
11988711
11988712
11988713
11988714
11988721
11988722
11988723
11988724
11988731
11988732
11988733
11988734
11988741
11988742
11988743
11988744
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (23)
223 Determination ofModeNumbers To obtain the couples119901 119902 that permit having no trivial solutions the transcen-dental equation system formed by (18) and (23) is solvedThesolution cannot be determined analytically [14] so we usedthe Wolfram Mathematica software version 801 to get thenumerical solutions The triangulation of the systems of twoequations permits determining the119860
119894and119861
119894coefficients after
normalizing 1198601and 119861
1
The natural mode of the plate is therefore given by
119882(119909 119910) =
infin
sum
119898=1
infin
sum
119899=1
119883119898119899(119909) 119884119898119899(119910) (24)
224 Determination of the Time Function 119879119898119899 Suppose the
solution of governing equation (3) is in the form like
119882(119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119882119898119899(119909 119910) 119879
119898119899(119905) (25)
where 119882119898119899
is a function of the spatial coordinates namedmodal function or natural mode of the plate and 119879
119898119899a
function of timeThus for119882
119898119899satisfying (9) the 119879
119898119899(119905) function verifies
the following equation [22 24]
119898119899(119905) + 2120572120596
119898119899119898119899(119905) + 120596
2
119898119899119879119898119899(119905)
=int119886
0
int119887
0
119882(119909 119910) 119901 (119909 119910 119905) 119889119909 119889119910
(120588ℎ + 119898119900) int119886
0
int119887
0
[119882 (119909 119910)]2
119889119909 119889119910
(26)
with 2120572120596119898119899
= 120574ℎ(120588ℎ + 119898119900) and 120572 being the damping ratio
of systemThe corresponding homogeneous solutions of (26) can be
written
1198790119898119899
(119905) = 119890minus120572120596119898119899119905
[119886119898119899
cos (120596119898119899
radic1 minus 1205722119905)
+ 119887119898119899
sin (120596119898119899
radic1 minus 1205722119905)]
(27)
According to the initial conditions defined in (6) 1198790119898119899
(119905) =
119886119898119899
= 119887119898119899
= 0 A particular and the general solution of (26)are both given by [22]
119879119898119899(119905) =
119901119900119884119898119899((12) 119887)
(120588ℎ + 119898119900) 119876119898119899120596119898119899
radic1 minus 1205722
sdot int
119905
0
[(1 +1
2cos (120596120591))119883
119898119899(1
2acc sdot 1205912 + V
119900sdot 120591)
sdot 119890minus120572sdot120596119898119899(119905minus120591) sin (120596
119898119899
radic1 minus 1205722 (119905 minus 120591))] 119889120591
(28)
where 119876119898119899
is the normalizing function defined by
119876119898119899= int
119886
0
int
119887
0
[119883119898119899(119909)]2
[119884119898119899(119910)]2
119889119909 119889119910 (29)
Finally the deflection solution of governing equation (3) is inthe form of
119882(119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119883119898119899(119909) 119884119898119899(119910) 119879119898119899(119905) (30)
3 Numerical ApplicationsResults and Discussion
Using the procedure described above a rigid roadway pave-ment subjected to a dynamic traffic load is analyzed In thiswork a finite rectangular plate doweled along its edges isconsidered as shown in Figure 1 The structural propertiesof the plate include the size of 5m times 35m the thicknessof 025m and physical characteristics of the plate like the
6 International Scholarly Research Notices
0
00002
00004
00006
00008
0001
00012
Defl
ectio
n (m
)
0 002 004 006 008 01 012 014 016 018 02Time (s)
Uniform step loadHarmonic load
Figure 2 Variation of the deflection directly under load versus timefor different types of load (119867
119904= 25m)
density of 120588 = 2500 kgsdotmminus3 Poissonrsquos ratio 120592 = 025and the longitudinal elastic modulus 119864119901 = 2410
9 Pa Thedensity of the subgrade is taken equal to 119898 = 1800 kgsdotmminus3with Poissonrsquos ratio 120592
119904= 035 and a longitudinal elastic
modulus 119864 = 50106 Pa Finally the moving load magnitude
is supposed to be 119875119900= 8010
3N and circular frequency120596 = 100 radsdotsminus1 acceleration acc = 2msdotsminus2 and a speedof V119900= 25msdotsminus1 [14] These parameters are typical material
and structural properties of highway and airport pavementsaccording to French Central Laboratory of Bridges andPavements [3] It is also assumed that a damping ratio of thesystem equals 120572 = 10 [14] For comparison purposes threetypes of soil (i) Pasternak soil type (ii) Pasternak-Vlasov soiltype and (iii) Pasternak-Vlasov accounting the soil inertiatype (three-parameter soil type) are considered
31 Variation of Deflection as a Function of Time Figure 2shows for the three-parameter soil the variation of deflectionunder load as a function of time This figure shows the time-displacement curve for two types of load the uniform stepload and the harmonically load These loads evolve with thesame constant acceleration and initial velocity It is foundthat the deflection of the plate initially greatly increases withrapid oscillations and high amplitude up to the moment119905 = 35 times 10
minus2 s This observation characterizes the transientdomain for both types of load After this phase a stabilizationof the oscillations is noted and the plate enters the stationarydomain In the stationary domain the amplitude of deflectiondoes not vary depending on the time For harmonic loadthe deflection varies harmonically with the time since thisload type is harmonic but for step load the deflectiondoes not vary considerably in stationary domain Yet thedeflection seemed affected by the boundary condition sincethe deflection varies considerably for both types of load whenthe load approaches boundary of the plate The maximum ofdeflection in transient domain appears at time 119905 = 0003 sand this value is 66 percent more than those in stationarydomain which appears at time 119905 = 4120587120596 = 01256 s forharmonic load This shows how it is important to take into
minus00002
0
00002
00004
00006
00008
0001
00012
0 002 004 006 008 01 012 014 016 018 02Time (s)D
eflec
tion
at p
oint
(x=0y=1
75
m)
Figure 3 Variation of the deflection at the fixed point of coordinates(119909 = 0 119910 = 175m) versus time for a dynamically activated soildepth119867
119904= 25m
account the transient domain response in the rigid pavementstructures resistance analysis In the specific case the partof the plate concerned by this deflection is the segment[0 087]m Beyond these points the value of maximumdeflection is 119908 = 0000551479m Besides it is noticed thatthe response of uniform concentrated time step load is lessthan the harmonic loadThat occurs in both transient domainand steady-state domain of plate response
Figure 3 shows the variation of the deflection as a func-tion of time at a fixed point with coordinates 119909 = 0 and119910 = 175m when the load is moving along the central axisof the plate (0 le 119909 le 5m and 119910 = 175m) It is noted thatthemaximumdeflection obtained neighborhood observationpoint along the traveling direction of the load and decreasesin magnitude as well as the load is removingThis shows thatthe maximum deflection occurs near the application point ofthe load
32 Dynamically Activated Soil Depth (119867119904) Effect on Dynamic
Response Based on the data listed above the first five modenumbers of the plate modeling the pavement were deter-mined in the 119909-direction and the first five mode numberswere determined in the 119910-direction We plotted the variationof the deflection curves according to different variables 119909 119910and 119905
Figure 4 shows the variations of the deflection at thecenter of the plate (119909 = 25m 119910 = 175m) depending onthe dynamically activated soil depth for different types of soilwhen the load is located at the center of the plate It can beseen that for the Pasternak soil the value of the deflection ofthe plate is constant (119908 = 0000197106m) whatever the con-sidered depth of the foundation For Pasternak-Vlasov soiltype and three-parameter soil type the deflection increasesto reach a maximum value at a given depth (119867
119904= 40m for
Vlasov soil type with 119908 = 0000192939m and 119867119904= 25m
for three-parameter soil type with 119908 = 0000157565m) Forlower values of 119867
119904up to 119867
119904= 125m the deflection of the
two types of soil is the same After this depth the value ofthe deflection for three-parameter soil type is less than thoseof Vlasov soil typeThe difference between the two responsesincreases with the depth of the dynamically activated soil upto 52 percent at119867
119904= 10m
International Scholarly Research Notices 7
0
000005
00001
000015
00002
Cen
tral
defl
ectio
n (m
)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
0 1 2 3 4 5 6 7 8 9 10Hs (m)
Figure 4 Variation of the deflection in the center of the plate (119909 =25m 119910 = 175m) as a function of the dynamically activated depthof soil at time 119905 = 0099603 s when the load is located at the centerof the plate
0 05 1 15 2 25 3 35 4 45 5Vert
ical
cent
ral d
eflec
tion
(m)
x (m)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
200E minus 04
150E minus 04
100E minus 04
500E minus 05
100E minus 19
minus500E minus 05
Figure 5 Variation of the deflection along the central axis of theplate (0 le 119909 le 5m 119910 = 175m) for different types of soil at time119905 = 0099603 s when the load is located at the center of the plate
It is deduced from these observations that the dynami-cally activated soil depth greatly influences the response ofthe plate We have chosen in this study the depth maximizingthe three-parameter soil type119867
119904= 25m
33 Influence of the Inertia of the Soil on the DynamicResponse Figure 5 shows the changes in the deflection alongthe central axis of the pavement plate (119910 = 175m 0 le
119909 le 5m) for different types of soil at time 119905 = 0099603 swhen the moving load arrived at the center of the plate (119909 =25m and 119910 = 175m) It is noticed that the deflection islarger throughout the plate considering the Pasternak soilcompared to the deflection values for the three-parametersoil The deflections of the plate when the soil is Pasternak-Vlasov type have values between those obtained for the three-parameter soil and Pasternak soil types Taking the values ofthe deflections of the plate on the Pasternak-Vlasov soil type
0000010000200003000040000500006000070000800009
0001
Defl
ectio
n (m
)
20000 40000 60000 80000 100000 120000 1400000Po (kN)
Hs = 10mHs = 75m
Hs = 5mHs = 25mHs = 05m
Figure 6 Variation of the deflection as a function of plate magni-tude for different values of dynamically activated soil depth at time119905 = 01256 s
as a reference it can be seen that the deflections at the centerof the plate are reduced up to 1833 percent The more thedepth119867
119904is the higher the gap is In conclusion inertial soil
greatly reduces (up to 1833) the dynamic response of thepavement plate when the moving load is over the center ofthe plate
34 Effect of the Variation of Load Magnitude on the Displace-ment for Different Values of Dynamically Activated DepthFigure 6 shows the deflection of the plate versus the loadmagnitude for dynamically activated soil depths119867
119904= 05m
25m 5m 75m 10m It is noticed that the displacementincreases linearly with the increase in load magnitudeBesides the increasing of the dynamically activated depthparameter 119867
119904increases the deflection of the plate for low
values of 119867119904 Nevertheless for great values of dynamically
activated load the deflection of the plate is not affected bythe variation of the dynamically activated depth
35 Variation of Displacement at Optimal Time versus SoilParameters for Different Values of 119887119886 Table 1 presents thevalues of displacement under load versus soil parameters fordifferent values of 119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) attime 119905 = 01256 s This table is obtained for plates coveringthe same area The table shows that deflection increases withthe increase in 119887119886 So the deflection is great for square platecompared to the rectangular plateThe size of pavement plateconsiderably affected the displacement of the pavement plateIt is more useful for engineer to design the rigid pavementplate as a rectangular one
4 Conclusion
This paper dealt with some significant results from a studyof the dynamic analysis of rigid pavements The soil modelsused in this work are the well-known Pasternak modelthe Pasternak-Vlasov model which takes into account theinteraction between soil layers and the improved three-parametermodel considering the inertia of the soilThemainconclusions of this study are the following
8 International Scholarly Research Notices
Table 1 Displacement versus soils parameters for different values of119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) at time 119905 = 01256 s
119887119886 119887119886 = 05 119887119886 = 07 119887119886 = 10119867119904= 05119896119900= 1662 times 108
377 times 10minus4m 378 times 10minus4m 573 times 10minus4m119862119900= 2596 times 106
119898119900= 252326
119867119904= 25119896119900= 3325 times 107
527 times 10minus4m 550 times 10minus4m 708 times 10minus4m119862119900= 1298 times 107
119898119900= 126163
119867119904= 5119896119900= 1662 times 107
536 times 10minus4m 58 times 10minus4m 781 times 10minus4m119862119900= 2596 times 107
119898119900= 252326
119867119904= 75119896119900= 1108 times 107
548 times 10minus4m 573 times 10minus4m 848 times 10minus4m119862119900= 3894 times 107
119898119900= 378489
119867119904= 10119896119900= 8311 times 106
513 times 10minus4m 577 times 10minus4m 937 times 10minus4m119862119900= 5192 times 107
119898119900= 504652
(i) The soil inertia influences the pavement response atthe middle of the plate when the load evolving alongits centerline arrived at the center This indicates apossible overdesign of pavements when using thetwo-parameter soil model
(ii) The effect of dynamically activated depth of Pas-ternak-Vlasov soil and three-parameter soil on theresponse is found to be significant for both soilstypes but more for three-parameter type than thePasternak-Vlasov type
(iii) Before the stationary domain of oscillations a tran-sient response of the plate during 35 times 10minus2 secondsis noted The transient response is bigger than thestationary one and it will be necessary to investigatedeeply in further study
(iv) This study only covers plates pavement intercon-nected by dowels and tie bars So we could extend itto continuous pavements plates
(v) This study does not take into account the cyclic effectof the load So the fatigue response of the studiedsystem could be further analyzed
(vi) The resonance is not studied in this work despite theeffect that soil inertia can have in that so we intend tostudy it in further work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] SO Rahman and I Anam ldquoDynamic analysis of concrete pave-ment under moving loadsrdquo Journal of Civil and EnvironmentalEngineering vol 1 no 1 pp 1ndash6 2005
[2] M S Wei Tu ldquoResponse modelling of pavement subjected todynamic surface loading based on stress-based multi-layeredplate theoryrdquo 2007
[3] LCPC Conception et Dimensionnement des Chaussees NeuvesGuide Technique LCPC Ed Ministere de lrsquoEquipement desTransports et du Tourisme Paris France 1994
[4] R L Baus and N R Stires Mechanistic-Empirical PavementDesign Guide University of South Carolina Columbia SouthCarolina 2010
[5] M-H Huang and D P Thambiratnam ldquoDeflection responseof plate on Winkler foundation to moving accelerated loadsrdquoEngineering Structures vol 23 no 9 pp 1134ndash1141 2001
[6] S-M Kirn and JM Roesset ldquoMoving loads on a plate on elasticfoundationrdquo Journal of EngineeringMechanics vol 124 no 9 pp1010ndash1017 1998
[7] P Ullidtz Modelling Flexible Pavement Response and Perfor-mance Technical University of Denmark Polytekn KongensLyngby Denmark 1998
[8] L Sun ldquoSteady-state dynamic response of a Kirchhoff rsquos slabon viscoelastic Kelvinrsquos foundation to moving harmonic loadsrdquoJournal of Applied Mechanics vol 74 no 6 pp 1212ndash1224 2007
[9] D St-Laurent Synthese des Outils deModelisation de ChaussseesActuellement Disponibles au LCPC LCPC Paris France 2008httpwwwlcpcfr
[10] S Lu ldquoAnalytical dynamic displacement response of rigid pave-ments to moving concentrated and line loadsrdquo InternationalJournal of Solids and Structures vol 43 no 14-15 pp 4370ndash43832006
[11] ARA and ERES Division ldquoAppendix QQ structural responsemodels for rigid pavementsrdquo inGuide forMechanistic-EmpiricalDesign of New and Rehabilitated Pavement Structures pp 1ndash91NCHRP Champaign Ill USA 2003
[12] T Nguyen-Thoi H Luong-Van P Phung-Van T Rabczuk andD Tran-Trung ldquoDynamic responses of composite plates on thepasternak foundation subjected to a moving mass by a cell-based smoothed discrete shear gap (CS-FEM-DSG3) methodrdquoInternational Journal of Composite Materials vol 3 no 6 pp19ndash27 2013
[13] C Aron and E Jonas Structural element approaches for soil-structure interaction [MS thesis] Chalmers University of Tech-nology Goteborg Sweden 2012
[14] S Alisjahbana andWWangsadinata ldquoDynamic analysis of rigidroadway pavement under moving traffic loads with variablevelocityrdquo Interaction and Multiscale Mechanics vol 5 no 2 pp105ndash114 2012
[15] S Lu ldquoDynamic displacement response of beam-type structuresto moving line loadsrdquo International Journal of Solids andStructures vol 38 no 48-49 pp 8869ndash8878 2001
[16] O Civalek ldquoNonlinear analysis of thin rectangular plates onWinklerndashPasternak elastic foundations by DSCndashHDQ meth-odsrdquo Applied Mathematical Modelling vol 31 no 3 pp 606ndash624 2007
[17] G Pan and S N Atluri ldquoDynamic response of finite sizedelastic runways subjected tomoving loads a coupledBEMFEMapproachrdquo International Journal for Numerical Methods inEngineering vol 38 no 18 pp 3143ndash3166 1995
International Scholarly Research Notices 9
[18] M Gibigaye Problems of Dynamic Response of Shells Contactingwith an Inertial Medium at a Transient Domain of VibrationsIndustrial Institut of Zaporozhye Zaporozhye Ukraine 1992
[19] Z Dimitrovova ldquoEnhanced formula for a critical velocity ofa uniformly moving loadrdquo in Proceedings of the 6th EuropeanCongress on Computational Methods in Applied Sciences andEngineering (ECCOMAS rsquo12) pp 1ndash10 Vienna Austria Septem-ber 2012
[20] M S Asik ldquoVertical vibration analysis of rigid footings on a soillayer with a rigid baserdquo 1993 httpsrepositoriestdlorgttu-irbitstreamhandle23462010731295007715294pdfsequence
[21] A Turhan A Consistent Vlasov Model for Analysis of Plates onElastic Foundations Using the Finite Element Method GraduateFaculty Texas Tech University Lubbock Tex USA 1992
[22] C Xiang-sheng ldquoDynamic response of plates on elastic foun-dations due to the moving loadsrdquo Applied Mathematics andMechanics vol 8 no 4 pp 355ndash365 1987
[23] V I Samul The Basis of Elasticity and Plasticity TheoriesPedagogic Book for High Schools Students MoscowHigh SchoolMoscow Idaho USA 2nd edition 1982
[24] R Harberman Elementary Applied Partial Differential Equa-tions with Fourier Serie and Boundary Value Problem PrenticeHall Englewood Cliffs NJ USA 2nd edition 1987
[25] S Alisjahbana ldquoDynamic response of clamped orthotropicplates to dynamic moving loadsrdquo in Proceedings of the 13thWorld Conference on Earthquake Engineering VancouverCanada November 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 International Scholarly Research Notices
This equation is independent of time as the function119882119898119899
Such a problem has solutions which may be in Navierrsquos form[23 24]
119882119898119899(119909 119910) = 119860
119898119899sin(
119901120587
119886119909) sin(
119902120587
119887119910) (10)
Here119901 and 119902 aremode numbers of the plateThey are realnumbers because of the boundary conditions of the problem[14 22 25] and 119898 119899 are their respective roundness to thenearest integer number The eigenfrequencies solutions of(9) are for the first auxiliary problem those which satisfyboundary conditions (5a) (5b) (5c) and (5d)
1205962
119898119899=
1198631205874
120588ℎ + 119898119900
[(119901
119886)
4
+ 2 (119901119902
119886119887)
2
+ (119902
119887)
4
]
+119896119900
120588ℎ + 119898119900
+119888119900
120588ℎ + 119898119900
[(119901120587
119886)
2
+ (119902120587
119887)
2
]
(11)
222 Determination of Eigenmodes of the Plate To obtainthe mode numbers 119901 and 119902 and the eigenfunctions modifiedBolotin method is used This consists of the resolution of thetwo auxiliary Levyrsquos problems That can permit determiningthe eigenmode of the plate
(i) First Auxiliary Levy Problem The solution of (9) for thefirst auxiliary problem that satisfies the boundary conditionsof (4a) (4b) (5a) and (5b) can be expressed as
119882119898119899(119909 119910) = 119883
119898119899(119909) sin(
119902120587
119887119910) (12)
where119883119898119899(119909) is the eigenmode of the plate in the119909-direction
Substituting (12) into (9) we obtain an ordinary differen-tial equation for119883
119898119899(119910)
1198894
119883119898119899(119909)
1198891199094minus [2 (
119902120587
119887)
2
+119888119900
119863]1198892
119883119898119899(119909)
1198891199092
minus (119901120587
119886)
2
[(119901120587
119886)
2
+ 2 (119902120587
119887)
2
+119888119900
119863]119883119898119899(119909)
= 0
(13)
The solutions of the characteristic equation of (13) are
12058212= plusmn
120587
119886119887
radic211990221198862 + 11990121198872 +1198881199001198862
1198872
1198631205872
12058234= plusmn
119901120587
119886119894
(14)
For 120573 = radic211990221198862 + 11990121198872 + (119888119900119886211988721198631205872)119883(119909) becomes
119883119898119899(119909) = 119860
1cosh(
120573120587
119886119887119909) + 119860
2sinh(
120573120587
119886119887119909)
+ 1198603cos(
119901120587
119886119909) + 119860
4sin(
119901120587
119886119909)
(15)
Equation (15) gives the general form of the eigenmode ofthe plate in the 119909-direction
Boundary conditions along 119909-axis permit determiningthe 119860
119894coefficients
119886111198601+ 119886121198602+ 119886131198603+ 119886141198604= 0
119886211198601+ 119886221198602+ 119886231198603+ 119886241198604= 0
119886311198601+ 119886321198602+ 119886331198603+ 119886341198604= 0
119886411198601+ 119886421198602+ 119886431198603+ 119886441198604= 0
(16)
where 119886119894119895coefficients are given by
11988611= 1198961199041199091
11988612= 119863(
120573120587
119886)
3
minus 119863(120573120587
119886119887)(
119902120587
119886)
2
11988613= 1198961199041199091
11988614= minus119863[(
119901120587
119886)
3
+ (2 minus 120592) (119901120587
119886) (
119902120587
119886)
2
]
11988621= 11988612sinh(
120573120587
119887) + 119896119904
1199091sinh(
120573120587
119887)
11988622= 11988612cosh(
120573120587
119887) + 119896119904
1199091sinh(
120573120587
119887)
11988623= minus11988614sin (119901120587) + 119896119904
1199091cos (119901120587)
11988624= minus11988614cos (119901120587) + 119896119904
1199091sin (119901120587)
11988631= 119863(
120573120587
119886119887)
2
minus 120592119863(119902120587
119887)
2
11988632= 1198961199031199091(120573120587
119886119887)
11988633= minus[119863(
119901120587
119886)
2
+ 120592119863(119902120587
119887)
2
]
11988634= 1198961199031199091(119901120587
119886)
11988641= 11988631cosh(
120573120587
119887) + 119896119903
1199091(120573120587
119886119887) sinh(
120573120587
119887)
11988642= 11988631sinh(
120573120587
119887) + 119896119903
1199091(120573120587
119886119887) cosh(
120573120587
119887)
11988643= 11988633cos (119901120587) minus 119886
34sin (119901120587)
11988644= 11988633sin (119901120587) minus 119886
34cos (119901120587)
(17)
In order to obtain no trivial solution it is necessary topropose that the determinant of (16) is zero so
DetA = 0 997904rArr
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
11988611
11988612
11988613
11988614
11988621
11988622
11988623
11988624
11988631
11988632
11988633
11988634
11988641
11988642
11988643
11988644
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (18)
International Scholarly Research Notices 5
(ii) Second Auxiliary Levy Problem The solution of (9) forthe second auxiliary problem that satisfies the boundaryconditions of (4c) (4d) (5c) and (5d) can be expressed as
119882119898119899(119909 119910) = 119884
119898119899(119910) sin(
119901120587
119886119909) (19)
where119884119898119899(119910) is the eigenmode of the plate in the 119910-direction
of the plateSubstituting (19) into (9) conducts to an ordinary differ-
ential equation for 119884119898119899(119910)
1198894
119884119898119899(119910)
1198891199104minus [2 (
119901120587
119886)
2
+119888119900
119863]1198892
119884119898119899(119910)
1198891199102
minus (119902120587
119887)
2
[(119902120587
119887)
2
+ 2 (119901120587
119886)
2
+119888119900
119863]119884119898119899(119910)
= 0
(20)
The solutions of the characteristic equation of (20) are
119884119898119899(119910) = 119861
1cosh(120579120587
119886119887119910) + 119861
2sinh(120579120587
119886119887119910)
+ 1198613cos(
119902120587
119887119910) + 119861
4sin(
119902120587
119887119910)
(21)
where 120579 = radic211990121198872 + 11990221198862 + (119888119900119886211988721198631205872)
Equation (21) gives the general form of the eigenmode ofthe plate in the 119910-direction
Boundary conditions along 119910-axis permit determiningthe 119861119894coefficients
119887111198611+ 119887121198612+ 119887131198613+ 119887141198614= 0
119887211198611+ 119887221198612+ 119887231198613+ 119887241198614= 0
119887311198611+ 119887321198612+ 119887331198613+ 119887341198614= 0
119887411198611+ 119887421198612+ 119887431198613+ 119887441198614= 0
(22)
Coefficients 119887119894119895were determined analogously to 119886
119894119895
In order to obtain no trivial solution it is necessary topropose that the determinant of (22) is zero so
DetB = 0 997904rArr
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
11988711
11988712
11988713
11988714
11988721
11988722
11988723
11988724
11988731
11988732
11988733
11988734
11988741
11988742
11988743
11988744
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (23)
223 Determination ofModeNumbers To obtain the couples119901 119902 that permit having no trivial solutions the transcen-dental equation system formed by (18) and (23) is solvedThesolution cannot be determined analytically [14] so we usedthe Wolfram Mathematica software version 801 to get thenumerical solutions The triangulation of the systems of twoequations permits determining the119860
119894and119861
119894coefficients after
normalizing 1198601and 119861
1
The natural mode of the plate is therefore given by
119882(119909 119910) =
infin
sum
119898=1
infin
sum
119899=1
119883119898119899(119909) 119884119898119899(119910) (24)
224 Determination of the Time Function 119879119898119899 Suppose the
solution of governing equation (3) is in the form like
119882(119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119882119898119899(119909 119910) 119879
119898119899(119905) (25)
where 119882119898119899
is a function of the spatial coordinates namedmodal function or natural mode of the plate and 119879
119898119899a
function of timeThus for119882
119898119899satisfying (9) the 119879
119898119899(119905) function verifies
the following equation [22 24]
119898119899(119905) + 2120572120596
119898119899119898119899(119905) + 120596
2
119898119899119879119898119899(119905)
=int119886
0
int119887
0
119882(119909 119910) 119901 (119909 119910 119905) 119889119909 119889119910
(120588ℎ + 119898119900) int119886
0
int119887
0
[119882 (119909 119910)]2
119889119909 119889119910
(26)
with 2120572120596119898119899
= 120574ℎ(120588ℎ + 119898119900) and 120572 being the damping ratio
of systemThe corresponding homogeneous solutions of (26) can be
written
1198790119898119899
(119905) = 119890minus120572120596119898119899119905
[119886119898119899
cos (120596119898119899
radic1 minus 1205722119905)
+ 119887119898119899
sin (120596119898119899
radic1 minus 1205722119905)]
(27)
According to the initial conditions defined in (6) 1198790119898119899
(119905) =
119886119898119899
= 119887119898119899
= 0 A particular and the general solution of (26)are both given by [22]
119879119898119899(119905) =
119901119900119884119898119899((12) 119887)
(120588ℎ + 119898119900) 119876119898119899120596119898119899
radic1 minus 1205722
sdot int
119905
0
[(1 +1
2cos (120596120591))119883
119898119899(1
2acc sdot 1205912 + V
119900sdot 120591)
sdot 119890minus120572sdot120596119898119899(119905minus120591) sin (120596
119898119899
radic1 minus 1205722 (119905 minus 120591))] 119889120591
(28)
where 119876119898119899
is the normalizing function defined by
119876119898119899= int
119886
0
int
119887
0
[119883119898119899(119909)]2
[119884119898119899(119910)]2
119889119909 119889119910 (29)
Finally the deflection solution of governing equation (3) is inthe form of
119882(119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119883119898119899(119909) 119884119898119899(119910) 119879119898119899(119905) (30)
3 Numerical ApplicationsResults and Discussion
Using the procedure described above a rigid roadway pave-ment subjected to a dynamic traffic load is analyzed In thiswork a finite rectangular plate doweled along its edges isconsidered as shown in Figure 1 The structural propertiesof the plate include the size of 5m times 35m the thicknessof 025m and physical characteristics of the plate like the
6 International Scholarly Research Notices
0
00002
00004
00006
00008
0001
00012
Defl
ectio
n (m
)
0 002 004 006 008 01 012 014 016 018 02Time (s)
Uniform step loadHarmonic load
Figure 2 Variation of the deflection directly under load versus timefor different types of load (119867
119904= 25m)
density of 120588 = 2500 kgsdotmminus3 Poissonrsquos ratio 120592 = 025and the longitudinal elastic modulus 119864119901 = 2410
9 Pa Thedensity of the subgrade is taken equal to 119898 = 1800 kgsdotmminus3with Poissonrsquos ratio 120592
119904= 035 and a longitudinal elastic
modulus 119864 = 50106 Pa Finally the moving load magnitude
is supposed to be 119875119900= 8010
3N and circular frequency120596 = 100 radsdotsminus1 acceleration acc = 2msdotsminus2 and a speedof V119900= 25msdotsminus1 [14] These parameters are typical material
and structural properties of highway and airport pavementsaccording to French Central Laboratory of Bridges andPavements [3] It is also assumed that a damping ratio of thesystem equals 120572 = 10 [14] For comparison purposes threetypes of soil (i) Pasternak soil type (ii) Pasternak-Vlasov soiltype and (iii) Pasternak-Vlasov accounting the soil inertiatype (three-parameter soil type) are considered
31 Variation of Deflection as a Function of Time Figure 2shows for the three-parameter soil the variation of deflectionunder load as a function of time This figure shows the time-displacement curve for two types of load the uniform stepload and the harmonically load These loads evolve with thesame constant acceleration and initial velocity It is foundthat the deflection of the plate initially greatly increases withrapid oscillations and high amplitude up to the moment119905 = 35 times 10
minus2 s This observation characterizes the transientdomain for both types of load After this phase a stabilizationof the oscillations is noted and the plate enters the stationarydomain In the stationary domain the amplitude of deflectiondoes not vary depending on the time For harmonic loadthe deflection varies harmonically with the time since thisload type is harmonic but for step load the deflectiondoes not vary considerably in stationary domain Yet thedeflection seemed affected by the boundary condition sincethe deflection varies considerably for both types of load whenthe load approaches boundary of the plate The maximum ofdeflection in transient domain appears at time 119905 = 0003 sand this value is 66 percent more than those in stationarydomain which appears at time 119905 = 4120587120596 = 01256 s forharmonic load This shows how it is important to take into
minus00002
0
00002
00004
00006
00008
0001
00012
0 002 004 006 008 01 012 014 016 018 02Time (s)D
eflec
tion
at p
oint
(x=0y=1
75
m)
Figure 3 Variation of the deflection at the fixed point of coordinates(119909 = 0 119910 = 175m) versus time for a dynamically activated soildepth119867
119904= 25m
account the transient domain response in the rigid pavementstructures resistance analysis In the specific case the partof the plate concerned by this deflection is the segment[0 087]m Beyond these points the value of maximumdeflection is 119908 = 0000551479m Besides it is noticed thatthe response of uniform concentrated time step load is lessthan the harmonic loadThat occurs in both transient domainand steady-state domain of plate response
Figure 3 shows the variation of the deflection as a func-tion of time at a fixed point with coordinates 119909 = 0 and119910 = 175m when the load is moving along the central axisof the plate (0 le 119909 le 5m and 119910 = 175m) It is noted thatthemaximumdeflection obtained neighborhood observationpoint along the traveling direction of the load and decreasesin magnitude as well as the load is removingThis shows thatthe maximum deflection occurs near the application point ofthe load
32 Dynamically Activated Soil Depth (119867119904) Effect on Dynamic
Response Based on the data listed above the first five modenumbers of the plate modeling the pavement were deter-mined in the 119909-direction and the first five mode numberswere determined in the 119910-direction We plotted the variationof the deflection curves according to different variables 119909 119910and 119905
Figure 4 shows the variations of the deflection at thecenter of the plate (119909 = 25m 119910 = 175m) depending onthe dynamically activated soil depth for different types of soilwhen the load is located at the center of the plate It can beseen that for the Pasternak soil the value of the deflection ofthe plate is constant (119908 = 0000197106m) whatever the con-sidered depth of the foundation For Pasternak-Vlasov soiltype and three-parameter soil type the deflection increasesto reach a maximum value at a given depth (119867
119904= 40m for
Vlasov soil type with 119908 = 0000192939m and 119867119904= 25m
for three-parameter soil type with 119908 = 0000157565m) Forlower values of 119867
119904up to 119867
119904= 125m the deflection of the
two types of soil is the same After this depth the value ofthe deflection for three-parameter soil type is less than thoseof Vlasov soil typeThe difference between the two responsesincreases with the depth of the dynamically activated soil upto 52 percent at119867
119904= 10m
International Scholarly Research Notices 7
0
000005
00001
000015
00002
Cen
tral
defl
ectio
n (m
)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
0 1 2 3 4 5 6 7 8 9 10Hs (m)
Figure 4 Variation of the deflection in the center of the plate (119909 =25m 119910 = 175m) as a function of the dynamically activated depthof soil at time 119905 = 0099603 s when the load is located at the centerof the plate
0 05 1 15 2 25 3 35 4 45 5Vert
ical
cent
ral d
eflec
tion
(m)
x (m)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
200E minus 04
150E minus 04
100E minus 04
500E minus 05
100E minus 19
minus500E minus 05
Figure 5 Variation of the deflection along the central axis of theplate (0 le 119909 le 5m 119910 = 175m) for different types of soil at time119905 = 0099603 s when the load is located at the center of the plate
It is deduced from these observations that the dynami-cally activated soil depth greatly influences the response ofthe plate We have chosen in this study the depth maximizingthe three-parameter soil type119867
119904= 25m
33 Influence of the Inertia of the Soil on the DynamicResponse Figure 5 shows the changes in the deflection alongthe central axis of the pavement plate (119910 = 175m 0 le
119909 le 5m) for different types of soil at time 119905 = 0099603 swhen the moving load arrived at the center of the plate (119909 =25m and 119910 = 175m) It is noticed that the deflection islarger throughout the plate considering the Pasternak soilcompared to the deflection values for the three-parametersoil The deflections of the plate when the soil is Pasternak-Vlasov type have values between those obtained for the three-parameter soil and Pasternak soil types Taking the values ofthe deflections of the plate on the Pasternak-Vlasov soil type
0000010000200003000040000500006000070000800009
0001
Defl
ectio
n (m
)
20000 40000 60000 80000 100000 120000 1400000Po (kN)
Hs = 10mHs = 75m
Hs = 5mHs = 25mHs = 05m
Figure 6 Variation of the deflection as a function of plate magni-tude for different values of dynamically activated soil depth at time119905 = 01256 s
as a reference it can be seen that the deflections at the centerof the plate are reduced up to 1833 percent The more thedepth119867
119904is the higher the gap is In conclusion inertial soil
greatly reduces (up to 1833) the dynamic response of thepavement plate when the moving load is over the center ofthe plate
34 Effect of the Variation of Load Magnitude on the Displace-ment for Different Values of Dynamically Activated DepthFigure 6 shows the deflection of the plate versus the loadmagnitude for dynamically activated soil depths119867
119904= 05m
25m 5m 75m 10m It is noticed that the displacementincreases linearly with the increase in load magnitudeBesides the increasing of the dynamically activated depthparameter 119867
119904increases the deflection of the plate for low
values of 119867119904 Nevertheless for great values of dynamically
activated load the deflection of the plate is not affected bythe variation of the dynamically activated depth
35 Variation of Displacement at Optimal Time versus SoilParameters for Different Values of 119887119886 Table 1 presents thevalues of displacement under load versus soil parameters fordifferent values of 119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) attime 119905 = 01256 s This table is obtained for plates coveringthe same area The table shows that deflection increases withthe increase in 119887119886 So the deflection is great for square platecompared to the rectangular plateThe size of pavement plateconsiderably affected the displacement of the pavement plateIt is more useful for engineer to design the rigid pavementplate as a rectangular one
4 Conclusion
This paper dealt with some significant results from a studyof the dynamic analysis of rigid pavements The soil modelsused in this work are the well-known Pasternak modelthe Pasternak-Vlasov model which takes into account theinteraction between soil layers and the improved three-parametermodel considering the inertia of the soilThemainconclusions of this study are the following
8 International Scholarly Research Notices
Table 1 Displacement versus soils parameters for different values of119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) at time 119905 = 01256 s
119887119886 119887119886 = 05 119887119886 = 07 119887119886 = 10119867119904= 05119896119900= 1662 times 108
377 times 10minus4m 378 times 10minus4m 573 times 10minus4m119862119900= 2596 times 106
119898119900= 252326
119867119904= 25119896119900= 3325 times 107
527 times 10minus4m 550 times 10minus4m 708 times 10minus4m119862119900= 1298 times 107
119898119900= 126163
119867119904= 5119896119900= 1662 times 107
536 times 10minus4m 58 times 10minus4m 781 times 10minus4m119862119900= 2596 times 107
119898119900= 252326
119867119904= 75119896119900= 1108 times 107
548 times 10minus4m 573 times 10minus4m 848 times 10minus4m119862119900= 3894 times 107
119898119900= 378489
119867119904= 10119896119900= 8311 times 106
513 times 10minus4m 577 times 10minus4m 937 times 10minus4m119862119900= 5192 times 107
119898119900= 504652
(i) The soil inertia influences the pavement response atthe middle of the plate when the load evolving alongits centerline arrived at the center This indicates apossible overdesign of pavements when using thetwo-parameter soil model
(ii) The effect of dynamically activated depth of Pas-ternak-Vlasov soil and three-parameter soil on theresponse is found to be significant for both soilstypes but more for three-parameter type than thePasternak-Vlasov type
(iii) Before the stationary domain of oscillations a tran-sient response of the plate during 35 times 10minus2 secondsis noted The transient response is bigger than thestationary one and it will be necessary to investigatedeeply in further study
(iv) This study only covers plates pavement intercon-nected by dowels and tie bars So we could extend itto continuous pavements plates
(v) This study does not take into account the cyclic effectof the load So the fatigue response of the studiedsystem could be further analyzed
(vi) The resonance is not studied in this work despite theeffect that soil inertia can have in that so we intend tostudy it in further work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] SO Rahman and I Anam ldquoDynamic analysis of concrete pave-ment under moving loadsrdquo Journal of Civil and EnvironmentalEngineering vol 1 no 1 pp 1ndash6 2005
[2] M S Wei Tu ldquoResponse modelling of pavement subjected todynamic surface loading based on stress-based multi-layeredplate theoryrdquo 2007
[3] LCPC Conception et Dimensionnement des Chaussees NeuvesGuide Technique LCPC Ed Ministere de lrsquoEquipement desTransports et du Tourisme Paris France 1994
[4] R L Baus and N R Stires Mechanistic-Empirical PavementDesign Guide University of South Carolina Columbia SouthCarolina 2010
[5] M-H Huang and D P Thambiratnam ldquoDeflection responseof plate on Winkler foundation to moving accelerated loadsrdquoEngineering Structures vol 23 no 9 pp 1134ndash1141 2001
[6] S-M Kirn and JM Roesset ldquoMoving loads on a plate on elasticfoundationrdquo Journal of EngineeringMechanics vol 124 no 9 pp1010ndash1017 1998
[7] P Ullidtz Modelling Flexible Pavement Response and Perfor-mance Technical University of Denmark Polytekn KongensLyngby Denmark 1998
[8] L Sun ldquoSteady-state dynamic response of a Kirchhoff rsquos slabon viscoelastic Kelvinrsquos foundation to moving harmonic loadsrdquoJournal of Applied Mechanics vol 74 no 6 pp 1212ndash1224 2007
[9] D St-Laurent Synthese des Outils deModelisation de ChaussseesActuellement Disponibles au LCPC LCPC Paris France 2008httpwwwlcpcfr
[10] S Lu ldquoAnalytical dynamic displacement response of rigid pave-ments to moving concentrated and line loadsrdquo InternationalJournal of Solids and Structures vol 43 no 14-15 pp 4370ndash43832006
[11] ARA and ERES Division ldquoAppendix QQ structural responsemodels for rigid pavementsrdquo inGuide forMechanistic-EmpiricalDesign of New and Rehabilitated Pavement Structures pp 1ndash91NCHRP Champaign Ill USA 2003
[12] T Nguyen-Thoi H Luong-Van P Phung-Van T Rabczuk andD Tran-Trung ldquoDynamic responses of composite plates on thepasternak foundation subjected to a moving mass by a cell-based smoothed discrete shear gap (CS-FEM-DSG3) methodrdquoInternational Journal of Composite Materials vol 3 no 6 pp19ndash27 2013
[13] C Aron and E Jonas Structural element approaches for soil-structure interaction [MS thesis] Chalmers University of Tech-nology Goteborg Sweden 2012
[14] S Alisjahbana andWWangsadinata ldquoDynamic analysis of rigidroadway pavement under moving traffic loads with variablevelocityrdquo Interaction and Multiscale Mechanics vol 5 no 2 pp105ndash114 2012
[15] S Lu ldquoDynamic displacement response of beam-type structuresto moving line loadsrdquo International Journal of Solids andStructures vol 38 no 48-49 pp 8869ndash8878 2001
[16] O Civalek ldquoNonlinear analysis of thin rectangular plates onWinklerndashPasternak elastic foundations by DSCndashHDQ meth-odsrdquo Applied Mathematical Modelling vol 31 no 3 pp 606ndash624 2007
[17] G Pan and S N Atluri ldquoDynamic response of finite sizedelastic runways subjected tomoving loads a coupledBEMFEMapproachrdquo International Journal for Numerical Methods inEngineering vol 38 no 18 pp 3143ndash3166 1995
International Scholarly Research Notices 9
[18] M Gibigaye Problems of Dynamic Response of Shells Contactingwith an Inertial Medium at a Transient Domain of VibrationsIndustrial Institut of Zaporozhye Zaporozhye Ukraine 1992
[19] Z Dimitrovova ldquoEnhanced formula for a critical velocity ofa uniformly moving loadrdquo in Proceedings of the 6th EuropeanCongress on Computational Methods in Applied Sciences andEngineering (ECCOMAS rsquo12) pp 1ndash10 Vienna Austria Septem-ber 2012
[20] M S Asik ldquoVertical vibration analysis of rigid footings on a soillayer with a rigid baserdquo 1993 httpsrepositoriestdlorgttu-irbitstreamhandle23462010731295007715294pdfsequence
[21] A Turhan A Consistent Vlasov Model for Analysis of Plates onElastic Foundations Using the Finite Element Method GraduateFaculty Texas Tech University Lubbock Tex USA 1992
[22] C Xiang-sheng ldquoDynamic response of plates on elastic foun-dations due to the moving loadsrdquo Applied Mathematics andMechanics vol 8 no 4 pp 355ndash365 1987
[23] V I Samul The Basis of Elasticity and Plasticity TheoriesPedagogic Book for High Schools Students MoscowHigh SchoolMoscow Idaho USA 2nd edition 1982
[24] R Harberman Elementary Applied Partial Differential Equa-tions with Fourier Serie and Boundary Value Problem PrenticeHall Englewood Cliffs NJ USA 2nd edition 1987
[25] S Alisjahbana ldquoDynamic response of clamped orthotropicplates to dynamic moving loadsrdquo in Proceedings of the 13thWorld Conference on Earthquake Engineering VancouverCanada November 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Scholarly Research Notices 5
(ii) Second Auxiliary Levy Problem The solution of (9) forthe second auxiliary problem that satisfies the boundaryconditions of (4c) (4d) (5c) and (5d) can be expressed as
119882119898119899(119909 119910) = 119884
119898119899(119910) sin(
119901120587
119886119909) (19)
where119884119898119899(119910) is the eigenmode of the plate in the 119910-direction
of the plateSubstituting (19) into (9) conducts to an ordinary differ-
ential equation for 119884119898119899(119910)
1198894
119884119898119899(119910)
1198891199104minus [2 (
119901120587
119886)
2
+119888119900
119863]1198892
119884119898119899(119910)
1198891199102
minus (119902120587
119887)
2
[(119902120587
119887)
2
+ 2 (119901120587
119886)
2
+119888119900
119863]119884119898119899(119910)
= 0
(20)
The solutions of the characteristic equation of (20) are
119884119898119899(119910) = 119861
1cosh(120579120587
119886119887119910) + 119861
2sinh(120579120587
119886119887119910)
+ 1198613cos(
119902120587
119887119910) + 119861
4sin(
119902120587
119887119910)
(21)
where 120579 = radic211990121198872 + 11990221198862 + (119888119900119886211988721198631205872)
Equation (21) gives the general form of the eigenmode ofthe plate in the 119910-direction
Boundary conditions along 119910-axis permit determiningthe 119861119894coefficients
119887111198611+ 119887121198612+ 119887131198613+ 119887141198614= 0
119887211198611+ 119887221198612+ 119887231198613+ 119887241198614= 0
119887311198611+ 119887321198612+ 119887331198613+ 119887341198614= 0
119887411198611+ 119887421198612+ 119887431198613+ 119887441198614= 0
(22)
Coefficients 119887119894119895were determined analogously to 119886
119894119895
In order to obtain no trivial solution it is necessary topropose that the determinant of (22) is zero so
DetB = 0 997904rArr
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
11988711
11988712
11988713
11988714
11988721
11988722
11988723
11988724
11988731
11988732
11988733
11988734
11988741
11988742
11988743
11988744
100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (23)
223 Determination ofModeNumbers To obtain the couples119901 119902 that permit having no trivial solutions the transcen-dental equation system formed by (18) and (23) is solvedThesolution cannot be determined analytically [14] so we usedthe Wolfram Mathematica software version 801 to get thenumerical solutions The triangulation of the systems of twoequations permits determining the119860
119894and119861
119894coefficients after
normalizing 1198601and 119861
1
The natural mode of the plate is therefore given by
119882(119909 119910) =
infin
sum
119898=1
infin
sum
119899=1
119883119898119899(119909) 119884119898119899(119910) (24)
224 Determination of the Time Function 119879119898119899 Suppose the
solution of governing equation (3) is in the form like
119882(119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119882119898119899(119909 119910) 119879
119898119899(119905) (25)
where 119882119898119899
is a function of the spatial coordinates namedmodal function or natural mode of the plate and 119879
119898119899a
function of timeThus for119882
119898119899satisfying (9) the 119879
119898119899(119905) function verifies
the following equation [22 24]
119898119899(119905) + 2120572120596
119898119899119898119899(119905) + 120596
2
119898119899119879119898119899(119905)
=int119886
0
int119887
0
119882(119909 119910) 119901 (119909 119910 119905) 119889119909 119889119910
(120588ℎ + 119898119900) int119886
0
int119887
0
[119882 (119909 119910)]2
119889119909 119889119910
(26)
with 2120572120596119898119899
= 120574ℎ(120588ℎ + 119898119900) and 120572 being the damping ratio
of systemThe corresponding homogeneous solutions of (26) can be
written
1198790119898119899
(119905) = 119890minus120572120596119898119899119905
[119886119898119899
cos (120596119898119899
radic1 minus 1205722119905)
+ 119887119898119899
sin (120596119898119899
radic1 minus 1205722119905)]
(27)
According to the initial conditions defined in (6) 1198790119898119899
(119905) =
119886119898119899
= 119887119898119899
= 0 A particular and the general solution of (26)are both given by [22]
119879119898119899(119905) =
119901119900119884119898119899((12) 119887)
(120588ℎ + 119898119900) 119876119898119899120596119898119899
radic1 minus 1205722
sdot int
119905
0
[(1 +1
2cos (120596120591))119883
119898119899(1
2acc sdot 1205912 + V
119900sdot 120591)
sdot 119890minus120572sdot120596119898119899(119905minus120591) sin (120596
119898119899
radic1 minus 1205722 (119905 minus 120591))] 119889120591
(28)
where 119876119898119899
is the normalizing function defined by
119876119898119899= int
119886
0
int
119887
0
[119883119898119899(119909)]2
[119884119898119899(119910)]2
119889119909 119889119910 (29)
Finally the deflection solution of governing equation (3) is inthe form of
119882(119909 119910 119905) =
infin
sum
119898=1
infin
sum
119899=1
119883119898119899(119909) 119884119898119899(119910) 119879119898119899(119905) (30)
3 Numerical ApplicationsResults and Discussion
Using the procedure described above a rigid roadway pave-ment subjected to a dynamic traffic load is analyzed In thiswork a finite rectangular plate doweled along its edges isconsidered as shown in Figure 1 The structural propertiesof the plate include the size of 5m times 35m the thicknessof 025m and physical characteristics of the plate like the
6 International Scholarly Research Notices
0
00002
00004
00006
00008
0001
00012
Defl
ectio
n (m
)
0 002 004 006 008 01 012 014 016 018 02Time (s)
Uniform step loadHarmonic load
Figure 2 Variation of the deflection directly under load versus timefor different types of load (119867
119904= 25m)
density of 120588 = 2500 kgsdotmminus3 Poissonrsquos ratio 120592 = 025and the longitudinal elastic modulus 119864119901 = 2410
9 Pa Thedensity of the subgrade is taken equal to 119898 = 1800 kgsdotmminus3with Poissonrsquos ratio 120592
119904= 035 and a longitudinal elastic
modulus 119864 = 50106 Pa Finally the moving load magnitude
is supposed to be 119875119900= 8010
3N and circular frequency120596 = 100 radsdotsminus1 acceleration acc = 2msdotsminus2 and a speedof V119900= 25msdotsminus1 [14] These parameters are typical material
and structural properties of highway and airport pavementsaccording to French Central Laboratory of Bridges andPavements [3] It is also assumed that a damping ratio of thesystem equals 120572 = 10 [14] For comparison purposes threetypes of soil (i) Pasternak soil type (ii) Pasternak-Vlasov soiltype and (iii) Pasternak-Vlasov accounting the soil inertiatype (three-parameter soil type) are considered
31 Variation of Deflection as a Function of Time Figure 2shows for the three-parameter soil the variation of deflectionunder load as a function of time This figure shows the time-displacement curve for two types of load the uniform stepload and the harmonically load These loads evolve with thesame constant acceleration and initial velocity It is foundthat the deflection of the plate initially greatly increases withrapid oscillations and high amplitude up to the moment119905 = 35 times 10
minus2 s This observation characterizes the transientdomain for both types of load After this phase a stabilizationof the oscillations is noted and the plate enters the stationarydomain In the stationary domain the amplitude of deflectiondoes not vary depending on the time For harmonic loadthe deflection varies harmonically with the time since thisload type is harmonic but for step load the deflectiondoes not vary considerably in stationary domain Yet thedeflection seemed affected by the boundary condition sincethe deflection varies considerably for both types of load whenthe load approaches boundary of the plate The maximum ofdeflection in transient domain appears at time 119905 = 0003 sand this value is 66 percent more than those in stationarydomain which appears at time 119905 = 4120587120596 = 01256 s forharmonic load This shows how it is important to take into
minus00002
0
00002
00004
00006
00008
0001
00012
0 002 004 006 008 01 012 014 016 018 02Time (s)D
eflec
tion
at p
oint
(x=0y=1
75
m)
Figure 3 Variation of the deflection at the fixed point of coordinates(119909 = 0 119910 = 175m) versus time for a dynamically activated soildepth119867
119904= 25m
account the transient domain response in the rigid pavementstructures resistance analysis In the specific case the partof the plate concerned by this deflection is the segment[0 087]m Beyond these points the value of maximumdeflection is 119908 = 0000551479m Besides it is noticed thatthe response of uniform concentrated time step load is lessthan the harmonic loadThat occurs in both transient domainand steady-state domain of plate response
Figure 3 shows the variation of the deflection as a func-tion of time at a fixed point with coordinates 119909 = 0 and119910 = 175m when the load is moving along the central axisof the plate (0 le 119909 le 5m and 119910 = 175m) It is noted thatthemaximumdeflection obtained neighborhood observationpoint along the traveling direction of the load and decreasesin magnitude as well as the load is removingThis shows thatthe maximum deflection occurs near the application point ofthe load
32 Dynamically Activated Soil Depth (119867119904) Effect on Dynamic
Response Based on the data listed above the first five modenumbers of the plate modeling the pavement were deter-mined in the 119909-direction and the first five mode numberswere determined in the 119910-direction We plotted the variationof the deflection curves according to different variables 119909 119910and 119905
Figure 4 shows the variations of the deflection at thecenter of the plate (119909 = 25m 119910 = 175m) depending onthe dynamically activated soil depth for different types of soilwhen the load is located at the center of the plate It can beseen that for the Pasternak soil the value of the deflection ofthe plate is constant (119908 = 0000197106m) whatever the con-sidered depth of the foundation For Pasternak-Vlasov soiltype and three-parameter soil type the deflection increasesto reach a maximum value at a given depth (119867
119904= 40m for
Vlasov soil type with 119908 = 0000192939m and 119867119904= 25m
for three-parameter soil type with 119908 = 0000157565m) Forlower values of 119867
119904up to 119867
119904= 125m the deflection of the
two types of soil is the same After this depth the value ofthe deflection for three-parameter soil type is less than thoseof Vlasov soil typeThe difference between the two responsesincreases with the depth of the dynamically activated soil upto 52 percent at119867
119904= 10m
International Scholarly Research Notices 7
0
000005
00001
000015
00002
Cen
tral
defl
ectio
n (m
)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
0 1 2 3 4 5 6 7 8 9 10Hs (m)
Figure 4 Variation of the deflection in the center of the plate (119909 =25m 119910 = 175m) as a function of the dynamically activated depthof soil at time 119905 = 0099603 s when the load is located at the centerof the plate
0 05 1 15 2 25 3 35 4 45 5Vert
ical
cent
ral d
eflec
tion
(m)
x (m)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
200E minus 04
150E minus 04
100E minus 04
500E minus 05
100E minus 19
minus500E minus 05
Figure 5 Variation of the deflection along the central axis of theplate (0 le 119909 le 5m 119910 = 175m) for different types of soil at time119905 = 0099603 s when the load is located at the center of the plate
It is deduced from these observations that the dynami-cally activated soil depth greatly influences the response ofthe plate We have chosen in this study the depth maximizingthe three-parameter soil type119867
119904= 25m
33 Influence of the Inertia of the Soil on the DynamicResponse Figure 5 shows the changes in the deflection alongthe central axis of the pavement plate (119910 = 175m 0 le
119909 le 5m) for different types of soil at time 119905 = 0099603 swhen the moving load arrived at the center of the plate (119909 =25m and 119910 = 175m) It is noticed that the deflection islarger throughout the plate considering the Pasternak soilcompared to the deflection values for the three-parametersoil The deflections of the plate when the soil is Pasternak-Vlasov type have values between those obtained for the three-parameter soil and Pasternak soil types Taking the values ofthe deflections of the plate on the Pasternak-Vlasov soil type
0000010000200003000040000500006000070000800009
0001
Defl
ectio
n (m
)
20000 40000 60000 80000 100000 120000 1400000Po (kN)
Hs = 10mHs = 75m
Hs = 5mHs = 25mHs = 05m
Figure 6 Variation of the deflection as a function of plate magni-tude for different values of dynamically activated soil depth at time119905 = 01256 s
as a reference it can be seen that the deflections at the centerof the plate are reduced up to 1833 percent The more thedepth119867
119904is the higher the gap is In conclusion inertial soil
greatly reduces (up to 1833) the dynamic response of thepavement plate when the moving load is over the center ofthe plate
34 Effect of the Variation of Load Magnitude on the Displace-ment for Different Values of Dynamically Activated DepthFigure 6 shows the deflection of the plate versus the loadmagnitude for dynamically activated soil depths119867
119904= 05m
25m 5m 75m 10m It is noticed that the displacementincreases linearly with the increase in load magnitudeBesides the increasing of the dynamically activated depthparameter 119867
119904increases the deflection of the plate for low
values of 119867119904 Nevertheless for great values of dynamically
activated load the deflection of the plate is not affected bythe variation of the dynamically activated depth
35 Variation of Displacement at Optimal Time versus SoilParameters for Different Values of 119887119886 Table 1 presents thevalues of displacement under load versus soil parameters fordifferent values of 119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) attime 119905 = 01256 s This table is obtained for plates coveringthe same area The table shows that deflection increases withthe increase in 119887119886 So the deflection is great for square platecompared to the rectangular plateThe size of pavement plateconsiderably affected the displacement of the pavement plateIt is more useful for engineer to design the rigid pavementplate as a rectangular one
4 Conclusion
This paper dealt with some significant results from a studyof the dynamic analysis of rigid pavements The soil modelsused in this work are the well-known Pasternak modelthe Pasternak-Vlasov model which takes into account theinteraction between soil layers and the improved three-parametermodel considering the inertia of the soilThemainconclusions of this study are the following
8 International Scholarly Research Notices
Table 1 Displacement versus soils parameters for different values of119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) at time 119905 = 01256 s
119887119886 119887119886 = 05 119887119886 = 07 119887119886 = 10119867119904= 05119896119900= 1662 times 108
377 times 10minus4m 378 times 10minus4m 573 times 10minus4m119862119900= 2596 times 106
119898119900= 252326
119867119904= 25119896119900= 3325 times 107
527 times 10minus4m 550 times 10minus4m 708 times 10minus4m119862119900= 1298 times 107
119898119900= 126163
119867119904= 5119896119900= 1662 times 107
536 times 10minus4m 58 times 10minus4m 781 times 10minus4m119862119900= 2596 times 107
119898119900= 252326
119867119904= 75119896119900= 1108 times 107
548 times 10minus4m 573 times 10minus4m 848 times 10minus4m119862119900= 3894 times 107
119898119900= 378489
119867119904= 10119896119900= 8311 times 106
513 times 10minus4m 577 times 10minus4m 937 times 10minus4m119862119900= 5192 times 107
119898119900= 504652
(i) The soil inertia influences the pavement response atthe middle of the plate when the load evolving alongits centerline arrived at the center This indicates apossible overdesign of pavements when using thetwo-parameter soil model
(ii) The effect of dynamically activated depth of Pas-ternak-Vlasov soil and three-parameter soil on theresponse is found to be significant for both soilstypes but more for three-parameter type than thePasternak-Vlasov type
(iii) Before the stationary domain of oscillations a tran-sient response of the plate during 35 times 10minus2 secondsis noted The transient response is bigger than thestationary one and it will be necessary to investigatedeeply in further study
(iv) This study only covers plates pavement intercon-nected by dowels and tie bars So we could extend itto continuous pavements plates
(v) This study does not take into account the cyclic effectof the load So the fatigue response of the studiedsystem could be further analyzed
(vi) The resonance is not studied in this work despite theeffect that soil inertia can have in that so we intend tostudy it in further work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] SO Rahman and I Anam ldquoDynamic analysis of concrete pave-ment under moving loadsrdquo Journal of Civil and EnvironmentalEngineering vol 1 no 1 pp 1ndash6 2005
[2] M S Wei Tu ldquoResponse modelling of pavement subjected todynamic surface loading based on stress-based multi-layeredplate theoryrdquo 2007
[3] LCPC Conception et Dimensionnement des Chaussees NeuvesGuide Technique LCPC Ed Ministere de lrsquoEquipement desTransports et du Tourisme Paris France 1994
[4] R L Baus and N R Stires Mechanistic-Empirical PavementDesign Guide University of South Carolina Columbia SouthCarolina 2010
[5] M-H Huang and D P Thambiratnam ldquoDeflection responseof plate on Winkler foundation to moving accelerated loadsrdquoEngineering Structures vol 23 no 9 pp 1134ndash1141 2001
[6] S-M Kirn and JM Roesset ldquoMoving loads on a plate on elasticfoundationrdquo Journal of EngineeringMechanics vol 124 no 9 pp1010ndash1017 1998
[7] P Ullidtz Modelling Flexible Pavement Response and Perfor-mance Technical University of Denmark Polytekn KongensLyngby Denmark 1998
[8] L Sun ldquoSteady-state dynamic response of a Kirchhoff rsquos slabon viscoelastic Kelvinrsquos foundation to moving harmonic loadsrdquoJournal of Applied Mechanics vol 74 no 6 pp 1212ndash1224 2007
[9] D St-Laurent Synthese des Outils deModelisation de ChaussseesActuellement Disponibles au LCPC LCPC Paris France 2008httpwwwlcpcfr
[10] S Lu ldquoAnalytical dynamic displacement response of rigid pave-ments to moving concentrated and line loadsrdquo InternationalJournal of Solids and Structures vol 43 no 14-15 pp 4370ndash43832006
[11] ARA and ERES Division ldquoAppendix QQ structural responsemodels for rigid pavementsrdquo inGuide forMechanistic-EmpiricalDesign of New and Rehabilitated Pavement Structures pp 1ndash91NCHRP Champaign Ill USA 2003
[12] T Nguyen-Thoi H Luong-Van P Phung-Van T Rabczuk andD Tran-Trung ldquoDynamic responses of composite plates on thepasternak foundation subjected to a moving mass by a cell-based smoothed discrete shear gap (CS-FEM-DSG3) methodrdquoInternational Journal of Composite Materials vol 3 no 6 pp19ndash27 2013
[13] C Aron and E Jonas Structural element approaches for soil-structure interaction [MS thesis] Chalmers University of Tech-nology Goteborg Sweden 2012
[14] S Alisjahbana andWWangsadinata ldquoDynamic analysis of rigidroadway pavement under moving traffic loads with variablevelocityrdquo Interaction and Multiscale Mechanics vol 5 no 2 pp105ndash114 2012
[15] S Lu ldquoDynamic displacement response of beam-type structuresto moving line loadsrdquo International Journal of Solids andStructures vol 38 no 48-49 pp 8869ndash8878 2001
[16] O Civalek ldquoNonlinear analysis of thin rectangular plates onWinklerndashPasternak elastic foundations by DSCndashHDQ meth-odsrdquo Applied Mathematical Modelling vol 31 no 3 pp 606ndash624 2007
[17] G Pan and S N Atluri ldquoDynamic response of finite sizedelastic runways subjected tomoving loads a coupledBEMFEMapproachrdquo International Journal for Numerical Methods inEngineering vol 38 no 18 pp 3143ndash3166 1995
International Scholarly Research Notices 9
[18] M Gibigaye Problems of Dynamic Response of Shells Contactingwith an Inertial Medium at a Transient Domain of VibrationsIndustrial Institut of Zaporozhye Zaporozhye Ukraine 1992
[19] Z Dimitrovova ldquoEnhanced formula for a critical velocity ofa uniformly moving loadrdquo in Proceedings of the 6th EuropeanCongress on Computational Methods in Applied Sciences andEngineering (ECCOMAS rsquo12) pp 1ndash10 Vienna Austria Septem-ber 2012
[20] M S Asik ldquoVertical vibration analysis of rigid footings on a soillayer with a rigid baserdquo 1993 httpsrepositoriestdlorgttu-irbitstreamhandle23462010731295007715294pdfsequence
[21] A Turhan A Consistent Vlasov Model for Analysis of Plates onElastic Foundations Using the Finite Element Method GraduateFaculty Texas Tech University Lubbock Tex USA 1992
[22] C Xiang-sheng ldquoDynamic response of plates on elastic foun-dations due to the moving loadsrdquo Applied Mathematics andMechanics vol 8 no 4 pp 355ndash365 1987
[23] V I Samul The Basis of Elasticity and Plasticity TheoriesPedagogic Book for High Schools Students MoscowHigh SchoolMoscow Idaho USA 2nd edition 1982
[24] R Harberman Elementary Applied Partial Differential Equa-tions with Fourier Serie and Boundary Value Problem PrenticeHall Englewood Cliffs NJ USA 2nd edition 1987
[25] S Alisjahbana ldquoDynamic response of clamped orthotropicplates to dynamic moving loadsrdquo in Proceedings of the 13thWorld Conference on Earthquake Engineering VancouverCanada November 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
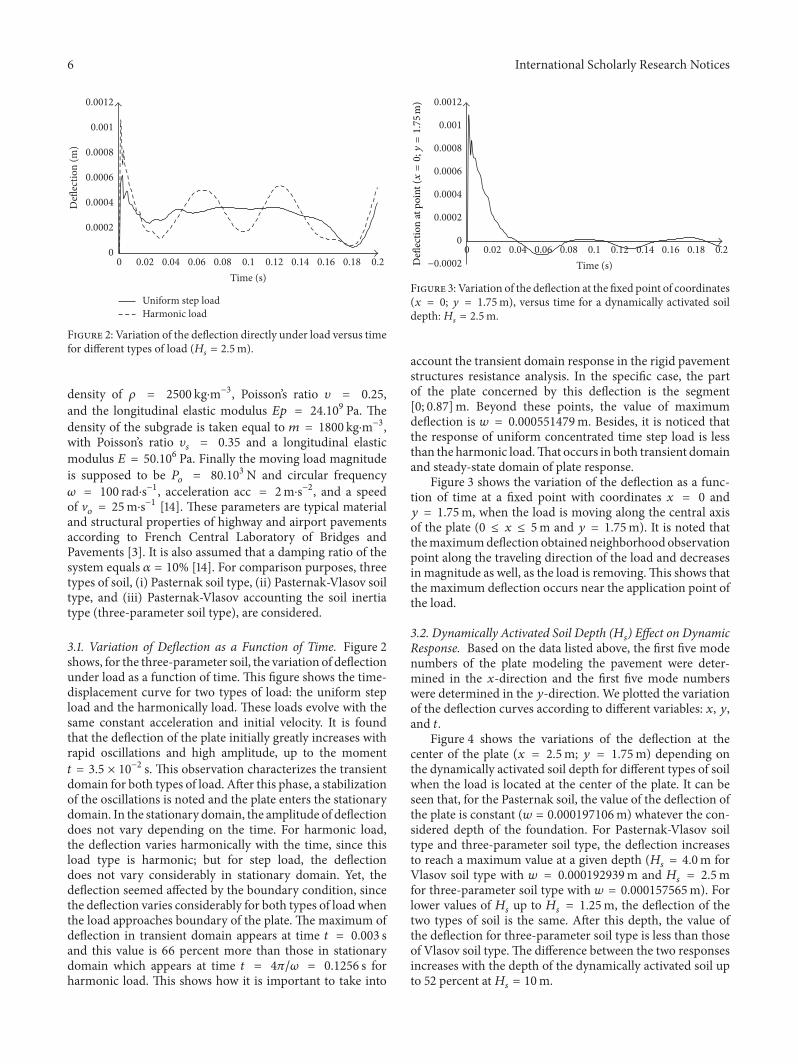
6 International Scholarly Research Notices
0
00002
00004
00006
00008
0001
00012
Defl
ectio
n (m
)
0 002 004 006 008 01 012 014 016 018 02Time (s)
Uniform step loadHarmonic load
Figure 2 Variation of the deflection directly under load versus timefor different types of load (119867
119904= 25m)
density of 120588 = 2500 kgsdotmminus3 Poissonrsquos ratio 120592 = 025and the longitudinal elastic modulus 119864119901 = 2410
9 Pa Thedensity of the subgrade is taken equal to 119898 = 1800 kgsdotmminus3with Poissonrsquos ratio 120592
119904= 035 and a longitudinal elastic
modulus 119864 = 50106 Pa Finally the moving load magnitude
is supposed to be 119875119900= 8010
3N and circular frequency120596 = 100 radsdotsminus1 acceleration acc = 2msdotsminus2 and a speedof V119900= 25msdotsminus1 [14] These parameters are typical material
and structural properties of highway and airport pavementsaccording to French Central Laboratory of Bridges andPavements [3] It is also assumed that a damping ratio of thesystem equals 120572 = 10 [14] For comparison purposes threetypes of soil (i) Pasternak soil type (ii) Pasternak-Vlasov soiltype and (iii) Pasternak-Vlasov accounting the soil inertiatype (three-parameter soil type) are considered
31 Variation of Deflection as a Function of Time Figure 2shows for the three-parameter soil the variation of deflectionunder load as a function of time This figure shows the time-displacement curve for two types of load the uniform stepload and the harmonically load These loads evolve with thesame constant acceleration and initial velocity It is foundthat the deflection of the plate initially greatly increases withrapid oscillations and high amplitude up to the moment119905 = 35 times 10
minus2 s This observation characterizes the transientdomain for both types of load After this phase a stabilizationof the oscillations is noted and the plate enters the stationarydomain In the stationary domain the amplitude of deflectiondoes not vary depending on the time For harmonic loadthe deflection varies harmonically with the time since thisload type is harmonic but for step load the deflectiondoes not vary considerably in stationary domain Yet thedeflection seemed affected by the boundary condition sincethe deflection varies considerably for both types of load whenthe load approaches boundary of the plate The maximum ofdeflection in transient domain appears at time 119905 = 0003 sand this value is 66 percent more than those in stationarydomain which appears at time 119905 = 4120587120596 = 01256 s forharmonic load This shows how it is important to take into
minus00002
0
00002
00004
00006
00008
0001
00012
0 002 004 006 008 01 012 014 016 018 02Time (s)D
eflec
tion
at p
oint
(x=0y=1
75
m)
Figure 3 Variation of the deflection at the fixed point of coordinates(119909 = 0 119910 = 175m) versus time for a dynamically activated soildepth119867
119904= 25m
account the transient domain response in the rigid pavementstructures resistance analysis In the specific case the partof the plate concerned by this deflection is the segment[0 087]m Beyond these points the value of maximumdeflection is 119908 = 0000551479m Besides it is noticed thatthe response of uniform concentrated time step load is lessthan the harmonic loadThat occurs in both transient domainand steady-state domain of plate response
Figure 3 shows the variation of the deflection as a func-tion of time at a fixed point with coordinates 119909 = 0 and119910 = 175m when the load is moving along the central axisof the plate (0 le 119909 le 5m and 119910 = 175m) It is noted thatthemaximumdeflection obtained neighborhood observationpoint along the traveling direction of the load and decreasesin magnitude as well as the load is removingThis shows thatthe maximum deflection occurs near the application point ofthe load
32 Dynamically Activated Soil Depth (119867119904) Effect on Dynamic
Response Based on the data listed above the first five modenumbers of the plate modeling the pavement were deter-mined in the 119909-direction and the first five mode numberswere determined in the 119910-direction We plotted the variationof the deflection curves according to different variables 119909 119910and 119905
Figure 4 shows the variations of the deflection at thecenter of the plate (119909 = 25m 119910 = 175m) depending onthe dynamically activated soil depth for different types of soilwhen the load is located at the center of the plate It can beseen that for the Pasternak soil the value of the deflection ofthe plate is constant (119908 = 0000197106m) whatever the con-sidered depth of the foundation For Pasternak-Vlasov soiltype and three-parameter soil type the deflection increasesto reach a maximum value at a given depth (119867
119904= 40m for
Vlasov soil type with 119908 = 0000192939m and 119867119904= 25m
for three-parameter soil type with 119908 = 0000157565m) Forlower values of 119867
119904up to 119867
119904= 125m the deflection of the
two types of soil is the same After this depth the value ofthe deflection for three-parameter soil type is less than thoseof Vlasov soil typeThe difference between the two responsesincreases with the depth of the dynamically activated soil upto 52 percent at119867
119904= 10m
International Scholarly Research Notices 7
0
000005
00001
000015
00002
Cen
tral
defl
ectio
n (m
)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
0 1 2 3 4 5 6 7 8 9 10Hs (m)
Figure 4 Variation of the deflection in the center of the plate (119909 =25m 119910 = 175m) as a function of the dynamically activated depthof soil at time 119905 = 0099603 s when the load is located at the centerof the plate
0 05 1 15 2 25 3 35 4 45 5Vert
ical
cent
ral d
eflec
tion
(m)
x (m)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
200E minus 04
150E minus 04
100E minus 04
500E minus 05
100E minus 19
minus500E minus 05
Figure 5 Variation of the deflection along the central axis of theplate (0 le 119909 le 5m 119910 = 175m) for different types of soil at time119905 = 0099603 s when the load is located at the center of the plate
It is deduced from these observations that the dynami-cally activated soil depth greatly influences the response ofthe plate We have chosen in this study the depth maximizingthe three-parameter soil type119867
119904= 25m
33 Influence of the Inertia of the Soil on the DynamicResponse Figure 5 shows the changes in the deflection alongthe central axis of the pavement plate (119910 = 175m 0 le
119909 le 5m) for different types of soil at time 119905 = 0099603 swhen the moving load arrived at the center of the plate (119909 =25m and 119910 = 175m) It is noticed that the deflection islarger throughout the plate considering the Pasternak soilcompared to the deflection values for the three-parametersoil The deflections of the plate when the soil is Pasternak-Vlasov type have values between those obtained for the three-parameter soil and Pasternak soil types Taking the values ofthe deflections of the plate on the Pasternak-Vlasov soil type
0000010000200003000040000500006000070000800009
0001
Defl
ectio
n (m
)
20000 40000 60000 80000 100000 120000 1400000Po (kN)
Hs = 10mHs = 75m
Hs = 5mHs = 25mHs = 05m
Figure 6 Variation of the deflection as a function of plate magni-tude for different values of dynamically activated soil depth at time119905 = 01256 s
as a reference it can be seen that the deflections at the centerof the plate are reduced up to 1833 percent The more thedepth119867
119904is the higher the gap is In conclusion inertial soil
greatly reduces (up to 1833) the dynamic response of thepavement plate when the moving load is over the center ofthe plate
34 Effect of the Variation of Load Magnitude on the Displace-ment for Different Values of Dynamically Activated DepthFigure 6 shows the deflection of the plate versus the loadmagnitude for dynamically activated soil depths119867
119904= 05m
25m 5m 75m 10m It is noticed that the displacementincreases linearly with the increase in load magnitudeBesides the increasing of the dynamically activated depthparameter 119867
119904increases the deflection of the plate for low
values of 119867119904 Nevertheless for great values of dynamically
activated load the deflection of the plate is not affected bythe variation of the dynamically activated depth
35 Variation of Displacement at Optimal Time versus SoilParameters for Different Values of 119887119886 Table 1 presents thevalues of displacement under load versus soil parameters fordifferent values of 119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) attime 119905 = 01256 s This table is obtained for plates coveringthe same area The table shows that deflection increases withthe increase in 119887119886 So the deflection is great for square platecompared to the rectangular plateThe size of pavement plateconsiderably affected the displacement of the pavement plateIt is more useful for engineer to design the rigid pavementplate as a rectangular one
4 Conclusion
This paper dealt with some significant results from a studyof the dynamic analysis of rigid pavements The soil modelsused in this work are the well-known Pasternak modelthe Pasternak-Vlasov model which takes into account theinteraction between soil layers and the improved three-parametermodel considering the inertia of the soilThemainconclusions of this study are the following
8 International Scholarly Research Notices
Table 1 Displacement versus soils parameters for different values of119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) at time 119905 = 01256 s
119887119886 119887119886 = 05 119887119886 = 07 119887119886 = 10119867119904= 05119896119900= 1662 times 108
377 times 10minus4m 378 times 10minus4m 573 times 10minus4m119862119900= 2596 times 106
119898119900= 252326
119867119904= 25119896119900= 3325 times 107
527 times 10minus4m 550 times 10minus4m 708 times 10minus4m119862119900= 1298 times 107
119898119900= 126163
119867119904= 5119896119900= 1662 times 107
536 times 10minus4m 58 times 10minus4m 781 times 10minus4m119862119900= 2596 times 107
119898119900= 252326
119867119904= 75119896119900= 1108 times 107
548 times 10minus4m 573 times 10minus4m 848 times 10minus4m119862119900= 3894 times 107
119898119900= 378489
119867119904= 10119896119900= 8311 times 106
513 times 10minus4m 577 times 10minus4m 937 times 10minus4m119862119900= 5192 times 107
119898119900= 504652
(i) The soil inertia influences the pavement response atthe middle of the plate when the load evolving alongits centerline arrived at the center This indicates apossible overdesign of pavements when using thetwo-parameter soil model
(ii) The effect of dynamically activated depth of Pas-ternak-Vlasov soil and three-parameter soil on theresponse is found to be significant for both soilstypes but more for three-parameter type than thePasternak-Vlasov type
(iii) Before the stationary domain of oscillations a tran-sient response of the plate during 35 times 10minus2 secondsis noted The transient response is bigger than thestationary one and it will be necessary to investigatedeeply in further study
(iv) This study only covers plates pavement intercon-nected by dowels and tie bars So we could extend itto continuous pavements plates
(v) This study does not take into account the cyclic effectof the load So the fatigue response of the studiedsystem could be further analyzed
(vi) The resonance is not studied in this work despite theeffect that soil inertia can have in that so we intend tostudy it in further work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] SO Rahman and I Anam ldquoDynamic analysis of concrete pave-ment under moving loadsrdquo Journal of Civil and EnvironmentalEngineering vol 1 no 1 pp 1ndash6 2005
[2] M S Wei Tu ldquoResponse modelling of pavement subjected todynamic surface loading based on stress-based multi-layeredplate theoryrdquo 2007
[3] LCPC Conception et Dimensionnement des Chaussees NeuvesGuide Technique LCPC Ed Ministere de lrsquoEquipement desTransports et du Tourisme Paris France 1994
[4] R L Baus and N R Stires Mechanistic-Empirical PavementDesign Guide University of South Carolina Columbia SouthCarolina 2010
[5] M-H Huang and D P Thambiratnam ldquoDeflection responseof plate on Winkler foundation to moving accelerated loadsrdquoEngineering Structures vol 23 no 9 pp 1134ndash1141 2001
[6] S-M Kirn and JM Roesset ldquoMoving loads on a plate on elasticfoundationrdquo Journal of EngineeringMechanics vol 124 no 9 pp1010ndash1017 1998
[7] P Ullidtz Modelling Flexible Pavement Response and Perfor-mance Technical University of Denmark Polytekn KongensLyngby Denmark 1998
[8] L Sun ldquoSteady-state dynamic response of a Kirchhoff rsquos slabon viscoelastic Kelvinrsquos foundation to moving harmonic loadsrdquoJournal of Applied Mechanics vol 74 no 6 pp 1212ndash1224 2007
[9] D St-Laurent Synthese des Outils deModelisation de ChaussseesActuellement Disponibles au LCPC LCPC Paris France 2008httpwwwlcpcfr
[10] S Lu ldquoAnalytical dynamic displacement response of rigid pave-ments to moving concentrated and line loadsrdquo InternationalJournal of Solids and Structures vol 43 no 14-15 pp 4370ndash43832006
[11] ARA and ERES Division ldquoAppendix QQ structural responsemodels for rigid pavementsrdquo inGuide forMechanistic-EmpiricalDesign of New and Rehabilitated Pavement Structures pp 1ndash91NCHRP Champaign Ill USA 2003
[12] T Nguyen-Thoi H Luong-Van P Phung-Van T Rabczuk andD Tran-Trung ldquoDynamic responses of composite plates on thepasternak foundation subjected to a moving mass by a cell-based smoothed discrete shear gap (CS-FEM-DSG3) methodrdquoInternational Journal of Composite Materials vol 3 no 6 pp19ndash27 2013
[13] C Aron and E Jonas Structural element approaches for soil-structure interaction [MS thesis] Chalmers University of Tech-nology Goteborg Sweden 2012
[14] S Alisjahbana andWWangsadinata ldquoDynamic analysis of rigidroadway pavement under moving traffic loads with variablevelocityrdquo Interaction and Multiscale Mechanics vol 5 no 2 pp105ndash114 2012
[15] S Lu ldquoDynamic displacement response of beam-type structuresto moving line loadsrdquo International Journal of Solids andStructures vol 38 no 48-49 pp 8869ndash8878 2001
[16] O Civalek ldquoNonlinear analysis of thin rectangular plates onWinklerndashPasternak elastic foundations by DSCndashHDQ meth-odsrdquo Applied Mathematical Modelling vol 31 no 3 pp 606ndash624 2007
[17] G Pan and S N Atluri ldquoDynamic response of finite sizedelastic runways subjected tomoving loads a coupledBEMFEMapproachrdquo International Journal for Numerical Methods inEngineering vol 38 no 18 pp 3143ndash3166 1995
International Scholarly Research Notices 9
[18] M Gibigaye Problems of Dynamic Response of Shells Contactingwith an Inertial Medium at a Transient Domain of VibrationsIndustrial Institut of Zaporozhye Zaporozhye Ukraine 1992
[19] Z Dimitrovova ldquoEnhanced formula for a critical velocity ofa uniformly moving loadrdquo in Proceedings of the 6th EuropeanCongress on Computational Methods in Applied Sciences andEngineering (ECCOMAS rsquo12) pp 1ndash10 Vienna Austria Septem-ber 2012
[20] M S Asik ldquoVertical vibration analysis of rigid footings on a soillayer with a rigid baserdquo 1993 httpsrepositoriestdlorgttu-irbitstreamhandle23462010731295007715294pdfsequence
[21] A Turhan A Consistent Vlasov Model for Analysis of Plates onElastic Foundations Using the Finite Element Method GraduateFaculty Texas Tech University Lubbock Tex USA 1992
[22] C Xiang-sheng ldquoDynamic response of plates on elastic foun-dations due to the moving loadsrdquo Applied Mathematics andMechanics vol 8 no 4 pp 355ndash365 1987
[23] V I Samul The Basis of Elasticity and Plasticity TheoriesPedagogic Book for High Schools Students MoscowHigh SchoolMoscow Idaho USA 2nd edition 1982
[24] R Harberman Elementary Applied Partial Differential Equa-tions with Fourier Serie and Boundary Value Problem PrenticeHall Englewood Cliffs NJ USA 2nd edition 1987
[25] S Alisjahbana ldquoDynamic response of clamped orthotropicplates to dynamic moving loadsrdquo in Proceedings of the 13thWorld Conference on Earthquake Engineering VancouverCanada November 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Scholarly Research Notices 7
0
000005
00001
000015
00002
Cen
tral
defl
ectio
n (m
)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
0 1 2 3 4 5 6 7 8 9 10Hs (m)
Figure 4 Variation of the deflection in the center of the plate (119909 =25m 119910 = 175m) as a function of the dynamically activated depthof soil at time 119905 = 0099603 s when the load is located at the centerof the plate
0 05 1 15 2 25 3 35 4 45 5Vert
ical
cent
ral d
eflec
tion
(m)
x (m)
Pasternak soil typePasternak-Vlasov soil typeThree-parameter soil type
200E minus 04
150E minus 04
100E minus 04
500E minus 05
100E minus 19
minus500E minus 05
Figure 5 Variation of the deflection along the central axis of theplate (0 le 119909 le 5m 119910 = 175m) for different types of soil at time119905 = 0099603 s when the load is located at the center of the plate
It is deduced from these observations that the dynami-cally activated soil depth greatly influences the response ofthe plate We have chosen in this study the depth maximizingthe three-parameter soil type119867
119904= 25m
33 Influence of the Inertia of the Soil on the DynamicResponse Figure 5 shows the changes in the deflection alongthe central axis of the pavement plate (119910 = 175m 0 le
119909 le 5m) for different types of soil at time 119905 = 0099603 swhen the moving load arrived at the center of the plate (119909 =25m and 119910 = 175m) It is noticed that the deflection islarger throughout the plate considering the Pasternak soilcompared to the deflection values for the three-parametersoil The deflections of the plate when the soil is Pasternak-Vlasov type have values between those obtained for the three-parameter soil and Pasternak soil types Taking the values ofthe deflections of the plate on the Pasternak-Vlasov soil type
0000010000200003000040000500006000070000800009
0001
Defl
ectio
n (m
)
20000 40000 60000 80000 100000 120000 1400000Po (kN)
Hs = 10mHs = 75m
Hs = 5mHs = 25mHs = 05m
Figure 6 Variation of the deflection as a function of plate magni-tude for different values of dynamically activated soil depth at time119905 = 01256 s
as a reference it can be seen that the deflections at the centerof the plate are reduced up to 1833 percent The more thedepth119867
119904is the higher the gap is In conclusion inertial soil
greatly reduces (up to 1833) the dynamic response of thepavement plate when the moving load is over the center ofthe plate
34 Effect of the Variation of Load Magnitude on the Displace-ment for Different Values of Dynamically Activated DepthFigure 6 shows the deflection of the plate versus the loadmagnitude for dynamically activated soil depths119867
119904= 05m
25m 5m 75m 10m It is noticed that the displacementincreases linearly with the increase in load magnitudeBesides the increasing of the dynamically activated depthparameter 119867
119904increases the deflection of the plate for low
values of 119867119904 Nevertheless for great values of dynamically
activated load the deflection of the plate is not affected bythe variation of the dynamically activated depth
35 Variation of Displacement at Optimal Time versus SoilParameters for Different Values of 119887119886 Table 1 presents thevalues of displacement under load versus soil parameters fordifferent values of 119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) attime 119905 = 01256 s This table is obtained for plates coveringthe same area The table shows that deflection increases withthe increase in 119887119886 So the deflection is great for square platecompared to the rectangular plateThe size of pavement plateconsiderably affected the displacement of the pavement plateIt is more useful for engineer to design the rigid pavementplate as a rectangular one
4 Conclusion
This paper dealt with some significant results from a studyof the dynamic analysis of rigid pavements The soil modelsused in this work are the well-known Pasternak modelthe Pasternak-Vlasov model which takes into account theinteraction between soil layers and the improved three-parametermodel considering the inertia of the soilThemainconclusions of this study are the following
8 International Scholarly Research Notices
Table 1 Displacement versus soils parameters for different values of119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) at time 119905 = 01256 s
119887119886 119887119886 = 05 119887119886 = 07 119887119886 = 10119867119904= 05119896119900= 1662 times 108
377 times 10minus4m 378 times 10minus4m 573 times 10minus4m119862119900= 2596 times 106
119898119900= 252326
119867119904= 25119896119900= 3325 times 107
527 times 10minus4m 550 times 10minus4m 708 times 10minus4m119862119900= 1298 times 107
119898119900= 126163
119867119904= 5119896119900= 1662 times 107
536 times 10minus4m 58 times 10minus4m 781 times 10minus4m119862119900= 2596 times 107
119898119900= 252326
119867119904= 75119896119900= 1108 times 107
548 times 10minus4m 573 times 10minus4m 848 times 10minus4m119862119900= 3894 times 107
119898119900= 378489
119867119904= 10119896119900= 8311 times 106
513 times 10minus4m 577 times 10minus4m 937 times 10minus4m119862119900= 5192 times 107
119898119900= 504652
(i) The soil inertia influences the pavement response atthe middle of the plate when the load evolving alongits centerline arrived at the center This indicates apossible overdesign of pavements when using thetwo-parameter soil model
(ii) The effect of dynamically activated depth of Pas-ternak-Vlasov soil and three-parameter soil on theresponse is found to be significant for both soilstypes but more for three-parameter type than thePasternak-Vlasov type
(iii) Before the stationary domain of oscillations a tran-sient response of the plate during 35 times 10minus2 secondsis noted The transient response is bigger than thestationary one and it will be necessary to investigatedeeply in further study
(iv) This study only covers plates pavement intercon-nected by dowels and tie bars So we could extend itto continuous pavements plates
(v) This study does not take into account the cyclic effectof the load So the fatigue response of the studiedsystem could be further analyzed
(vi) The resonance is not studied in this work despite theeffect that soil inertia can have in that so we intend tostudy it in further work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] SO Rahman and I Anam ldquoDynamic analysis of concrete pave-ment under moving loadsrdquo Journal of Civil and EnvironmentalEngineering vol 1 no 1 pp 1ndash6 2005
[2] M S Wei Tu ldquoResponse modelling of pavement subjected todynamic surface loading based on stress-based multi-layeredplate theoryrdquo 2007
[3] LCPC Conception et Dimensionnement des Chaussees NeuvesGuide Technique LCPC Ed Ministere de lrsquoEquipement desTransports et du Tourisme Paris France 1994
[4] R L Baus and N R Stires Mechanistic-Empirical PavementDesign Guide University of South Carolina Columbia SouthCarolina 2010
[5] M-H Huang and D P Thambiratnam ldquoDeflection responseof plate on Winkler foundation to moving accelerated loadsrdquoEngineering Structures vol 23 no 9 pp 1134ndash1141 2001
[6] S-M Kirn and JM Roesset ldquoMoving loads on a plate on elasticfoundationrdquo Journal of EngineeringMechanics vol 124 no 9 pp1010ndash1017 1998
[7] P Ullidtz Modelling Flexible Pavement Response and Perfor-mance Technical University of Denmark Polytekn KongensLyngby Denmark 1998
[8] L Sun ldquoSteady-state dynamic response of a Kirchhoff rsquos slabon viscoelastic Kelvinrsquos foundation to moving harmonic loadsrdquoJournal of Applied Mechanics vol 74 no 6 pp 1212ndash1224 2007
[9] D St-Laurent Synthese des Outils deModelisation de ChaussseesActuellement Disponibles au LCPC LCPC Paris France 2008httpwwwlcpcfr
[10] S Lu ldquoAnalytical dynamic displacement response of rigid pave-ments to moving concentrated and line loadsrdquo InternationalJournal of Solids and Structures vol 43 no 14-15 pp 4370ndash43832006
[11] ARA and ERES Division ldquoAppendix QQ structural responsemodels for rigid pavementsrdquo inGuide forMechanistic-EmpiricalDesign of New and Rehabilitated Pavement Structures pp 1ndash91NCHRP Champaign Ill USA 2003
[12] T Nguyen-Thoi H Luong-Van P Phung-Van T Rabczuk andD Tran-Trung ldquoDynamic responses of composite plates on thepasternak foundation subjected to a moving mass by a cell-based smoothed discrete shear gap (CS-FEM-DSG3) methodrdquoInternational Journal of Composite Materials vol 3 no 6 pp19ndash27 2013
[13] C Aron and E Jonas Structural element approaches for soil-structure interaction [MS thesis] Chalmers University of Tech-nology Goteborg Sweden 2012
[14] S Alisjahbana andWWangsadinata ldquoDynamic analysis of rigidroadway pavement under moving traffic loads with variablevelocityrdquo Interaction and Multiscale Mechanics vol 5 no 2 pp105ndash114 2012
[15] S Lu ldquoDynamic displacement response of beam-type structuresto moving line loadsrdquo International Journal of Solids andStructures vol 38 no 48-49 pp 8869ndash8878 2001
[16] O Civalek ldquoNonlinear analysis of thin rectangular plates onWinklerndashPasternak elastic foundations by DSCndashHDQ meth-odsrdquo Applied Mathematical Modelling vol 31 no 3 pp 606ndash624 2007
[17] G Pan and S N Atluri ldquoDynamic response of finite sizedelastic runways subjected tomoving loads a coupledBEMFEMapproachrdquo International Journal for Numerical Methods inEngineering vol 38 no 18 pp 3143ndash3166 1995
International Scholarly Research Notices 9
[18] M Gibigaye Problems of Dynamic Response of Shells Contactingwith an Inertial Medium at a Transient Domain of VibrationsIndustrial Institut of Zaporozhye Zaporozhye Ukraine 1992
[19] Z Dimitrovova ldquoEnhanced formula for a critical velocity ofa uniformly moving loadrdquo in Proceedings of the 6th EuropeanCongress on Computational Methods in Applied Sciences andEngineering (ECCOMAS rsquo12) pp 1ndash10 Vienna Austria Septem-ber 2012
[20] M S Asik ldquoVertical vibration analysis of rigid footings on a soillayer with a rigid baserdquo 1993 httpsrepositoriestdlorgttu-irbitstreamhandle23462010731295007715294pdfsequence
[21] A Turhan A Consistent Vlasov Model for Analysis of Plates onElastic Foundations Using the Finite Element Method GraduateFaculty Texas Tech University Lubbock Tex USA 1992
[22] C Xiang-sheng ldquoDynamic response of plates on elastic foun-dations due to the moving loadsrdquo Applied Mathematics andMechanics vol 8 no 4 pp 355ndash365 1987
[23] V I Samul The Basis of Elasticity and Plasticity TheoriesPedagogic Book for High Schools Students MoscowHigh SchoolMoscow Idaho USA 2nd edition 1982
[24] R Harberman Elementary Applied Partial Differential Equa-tions with Fourier Serie and Boundary Value Problem PrenticeHall Englewood Cliffs NJ USA 2nd edition 1987
[25] S Alisjahbana ldquoDynamic response of clamped orthotropicplates to dynamic moving loadsrdquo in Proceedings of the 13thWorld Conference on Earthquake Engineering VancouverCanada November 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 International Scholarly Research Notices
Table 1 Displacement versus soils parameters for different values of119887119886 (119887119886 = 05 119887119886 = 07 119887119886 = 10) at time 119905 = 01256 s
119887119886 119887119886 = 05 119887119886 = 07 119887119886 = 10119867119904= 05119896119900= 1662 times 108
377 times 10minus4m 378 times 10minus4m 573 times 10minus4m119862119900= 2596 times 106
119898119900= 252326
119867119904= 25119896119900= 3325 times 107
527 times 10minus4m 550 times 10minus4m 708 times 10minus4m119862119900= 1298 times 107
119898119900= 126163
119867119904= 5119896119900= 1662 times 107
536 times 10minus4m 58 times 10minus4m 781 times 10minus4m119862119900= 2596 times 107
119898119900= 252326
119867119904= 75119896119900= 1108 times 107
548 times 10minus4m 573 times 10minus4m 848 times 10minus4m119862119900= 3894 times 107
119898119900= 378489
119867119904= 10119896119900= 8311 times 106
513 times 10minus4m 577 times 10minus4m 937 times 10minus4m119862119900= 5192 times 107
119898119900= 504652
(i) The soil inertia influences the pavement response atthe middle of the plate when the load evolving alongits centerline arrived at the center This indicates apossible overdesign of pavements when using thetwo-parameter soil model
(ii) The effect of dynamically activated depth of Pas-ternak-Vlasov soil and three-parameter soil on theresponse is found to be significant for both soilstypes but more for three-parameter type than thePasternak-Vlasov type
(iii) Before the stationary domain of oscillations a tran-sient response of the plate during 35 times 10minus2 secondsis noted The transient response is bigger than thestationary one and it will be necessary to investigatedeeply in further study
(iv) This study only covers plates pavement intercon-nected by dowels and tie bars So we could extend itto continuous pavements plates
(v) This study does not take into account the cyclic effectof the load So the fatigue response of the studiedsystem could be further analyzed
(vi) The resonance is not studied in this work despite theeffect that soil inertia can have in that so we intend tostudy it in further work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] SO Rahman and I Anam ldquoDynamic analysis of concrete pave-ment under moving loadsrdquo Journal of Civil and EnvironmentalEngineering vol 1 no 1 pp 1ndash6 2005
[2] M S Wei Tu ldquoResponse modelling of pavement subjected todynamic surface loading based on stress-based multi-layeredplate theoryrdquo 2007
[3] LCPC Conception et Dimensionnement des Chaussees NeuvesGuide Technique LCPC Ed Ministere de lrsquoEquipement desTransports et du Tourisme Paris France 1994
[4] R L Baus and N R Stires Mechanistic-Empirical PavementDesign Guide University of South Carolina Columbia SouthCarolina 2010
[5] M-H Huang and D P Thambiratnam ldquoDeflection responseof plate on Winkler foundation to moving accelerated loadsrdquoEngineering Structures vol 23 no 9 pp 1134ndash1141 2001
[6] S-M Kirn and JM Roesset ldquoMoving loads on a plate on elasticfoundationrdquo Journal of EngineeringMechanics vol 124 no 9 pp1010ndash1017 1998
[7] P Ullidtz Modelling Flexible Pavement Response and Perfor-mance Technical University of Denmark Polytekn KongensLyngby Denmark 1998
[8] L Sun ldquoSteady-state dynamic response of a Kirchhoff rsquos slabon viscoelastic Kelvinrsquos foundation to moving harmonic loadsrdquoJournal of Applied Mechanics vol 74 no 6 pp 1212ndash1224 2007
[9] D St-Laurent Synthese des Outils deModelisation de ChaussseesActuellement Disponibles au LCPC LCPC Paris France 2008httpwwwlcpcfr
[10] S Lu ldquoAnalytical dynamic displacement response of rigid pave-ments to moving concentrated and line loadsrdquo InternationalJournal of Solids and Structures vol 43 no 14-15 pp 4370ndash43832006
[11] ARA and ERES Division ldquoAppendix QQ structural responsemodels for rigid pavementsrdquo inGuide forMechanistic-EmpiricalDesign of New and Rehabilitated Pavement Structures pp 1ndash91NCHRP Champaign Ill USA 2003
[12] T Nguyen-Thoi H Luong-Van P Phung-Van T Rabczuk andD Tran-Trung ldquoDynamic responses of composite plates on thepasternak foundation subjected to a moving mass by a cell-based smoothed discrete shear gap (CS-FEM-DSG3) methodrdquoInternational Journal of Composite Materials vol 3 no 6 pp19ndash27 2013
[13] C Aron and E Jonas Structural element approaches for soil-structure interaction [MS thesis] Chalmers University of Tech-nology Goteborg Sweden 2012
[14] S Alisjahbana andWWangsadinata ldquoDynamic analysis of rigidroadway pavement under moving traffic loads with variablevelocityrdquo Interaction and Multiscale Mechanics vol 5 no 2 pp105ndash114 2012
[15] S Lu ldquoDynamic displacement response of beam-type structuresto moving line loadsrdquo International Journal of Solids andStructures vol 38 no 48-49 pp 8869ndash8878 2001
[16] O Civalek ldquoNonlinear analysis of thin rectangular plates onWinklerndashPasternak elastic foundations by DSCndashHDQ meth-odsrdquo Applied Mathematical Modelling vol 31 no 3 pp 606ndash624 2007
[17] G Pan and S N Atluri ldquoDynamic response of finite sizedelastic runways subjected tomoving loads a coupledBEMFEMapproachrdquo International Journal for Numerical Methods inEngineering vol 38 no 18 pp 3143ndash3166 1995
International Scholarly Research Notices 9
[18] M Gibigaye Problems of Dynamic Response of Shells Contactingwith an Inertial Medium at a Transient Domain of VibrationsIndustrial Institut of Zaporozhye Zaporozhye Ukraine 1992
[19] Z Dimitrovova ldquoEnhanced formula for a critical velocity ofa uniformly moving loadrdquo in Proceedings of the 6th EuropeanCongress on Computational Methods in Applied Sciences andEngineering (ECCOMAS rsquo12) pp 1ndash10 Vienna Austria Septem-ber 2012
[20] M S Asik ldquoVertical vibration analysis of rigid footings on a soillayer with a rigid baserdquo 1993 httpsrepositoriestdlorgttu-irbitstreamhandle23462010731295007715294pdfsequence
[21] A Turhan A Consistent Vlasov Model for Analysis of Plates onElastic Foundations Using the Finite Element Method GraduateFaculty Texas Tech University Lubbock Tex USA 1992
[22] C Xiang-sheng ldquoDynamic response of plates on elastic foun-dations due to the moving loadsrdquo Applied Mathematics andMechanics vol 8 no 4 pp 355ndash365 1987
[23] V I Samul The Basis of Elasticity and Plasticity TheoriesPedagogic Book for High Schools Students MoscowHigh SchoolMoscow Idaho USA 2nd edition 1982
[24] R Harberman Elementary Applied Partial Differential Equa-tions with Fourier Serie and Boundary Value Problem PrenticeHall Englewood Cliffs NJ USA 2nd edition 1987
[25] S Alisjahbana ldquoDynamic response of clamped orthotropicplates to dynamic moving loadsrdquo in Proceedings of the 13thWorld Conference on Earthquake Engineering VancouverCanada November 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Scholarly Research Notices 9
[18] M Gibigaye Problems of Dynamic Response of Shells Contactingwith an Inertial Medium at a Transient Domain of VibrationsIndustrial Institut of Zaporozhye Zaporozhye Ukraine 1992
[19] Z Dimitrovova ldquoEnhanced formula for a critical velocity ofa uniformly moving loadrdquo in Proceedings of the 6th EuropeanCongress on Computational Methods in Applied Sciences andEngineering (ECCOMAS rsquo12) pp 1ndash10 Vienna Austria Septem-ber 2012
[20] M S Asik ldquoVertical vibration analysis of rigid footings on a soillayer with a rigid baserdquo 1993 httpsrepositoriestdlorgttu-irbitstreamhandle23462010731295007715294pdfsequence
[21] A Turhan A Consistent Vlasov Model for Analysis of Plates onElastic Foundations Using the Finite Element Method GraduateFaculty Texas Tech University Lubbock Tex USA 1992
[22] C Xiang-sheng ldquoDynamic response of plates on elastic foun-dations due to the moving loadsrdquo Applied Mathematics andMechanics vol 8 no 4 pp 355ndash365 1987
[23] V I Samul The Basis of Elasticity and Plasticity TheoriesPedagogic Book for High Schools Students MoscowHigh SchoolMoscow Idaho USA 2nd edition 1982
[24] R Harberman Elementary Applied Partial Differential Equa-tions with Fourier Serie and Boundary Value Problem PrenticeHall Englewood Cliffs NJ USA 2nd edition 1987
[25] S Alisjahbana ldquoDynamic response of clamped orthotropicplates to dynamic moving loadsrdquo in Proceedings of the 13thWorld Conference on Earthquake Engineering VancouverCanada November 2004
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of


















