
Research Article Distributed Fusion Filtering in Networked...
11
Research Article Distributed Fusion Filtering in Networked Systems with Random Measurement Matrices and Correlated Noises Raquel Caballero-Águila, 1 Irene García-Garrido, 2 and Josefa Linares-Pérez 2 1 Departamento de Estad´ ıstica, Universidad de Ja´ en, Paraje Las Lagunillas, 23071 Ja´ en, Spain 2 Departamento de Estad´ ıstica, Universidad de Granada, Avenida Fuentenueva, 18071 Granada, Spain Correspondence should be addressed to Josefa Linares-P´ erez; [email protected] Received 8 September 2015; Accepted 18 November 2015 Academic Editor: Xiaohua Ding Copyright © 2015 Raquel Caballero- ´ Aguila et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. e distributed fusion state estimation problem is addressed for sensor network systems with random state transition matrix and random measurement matrices, which provide a unified framework to consider some network-induced random phenomena. e process noise and all the sensor measurement noises are assumed to be one-step autocorrelated and different sensor noises are one- step cross-correlated; also, the process noise and each sensor measurement noise are two-step cross-correlated. ese correlation assumptions cover many practical situations, where the classical independence hypothesis is not realistic. Using an innovation methodology, local least-squares linear filtering estimators are recursively obtained at each sensor. e distributed fusion method is then used to form the optimal matrix-weighted sum of these local filters according to the mean squared error criterion. A numerical simulation example shows the accuracy of the proposed distributed fusion filtering algorithm and illustrates some of the network- induced stochastic uncertainties that can be dealt with in the current system model, such as sensor gain degradation, missing measurements, and multiplicative noise. 1. Introduction In recent years, information and communication technolo- gies have experienced a fast development, making the use of sensor networks become very popular for measurement acquisition and data processing, as they usually provide more information than traditional single-sensor communication systems. For this reason, the study of the estimation problem in sensor network stochastic systems has achieved great inter- est in many important research fields of engineering, comput- ing, and mathematics, mainly by their broad scope of appli- cations (target tracking, environment observation, habitat monitoring, animal tracking, communications, etc.). Although fusion algorithms have been proposed accord- ing to different methods (see, e.g., [1–3]), most existing results do not consider the new problems that arise inevitably in sensor network systems due to the restrictions of the physical equipment, mainly the limitations of bandwidth channels and uncertainties in the external environment, in both the model- ing process and the transmission of information. ese situa- tions can dramatically worsen the quality of fusion estimators designed. Multiplicative noise uncertainties, random delays, packet dropouts, and missing measurements are some of the most common problems that motivated the need to develop new estimation algorithms. erefore, it is not surprising that, in the past few years, the study of the state estimation problem in network systems with only one or several of the aforementioned uncertainties has become an active research area (see, e.g., [4–9] and the references therein). Clearly, some of these situations with network-induced phenomena are special cases of systems with transition and/or measurement random parameter matrices, which have important practical significance and arise in many application areas such as digital control of chemical processes, radar control, navigation systems, or economic systems [10]. On the one hand, random state transition matrices arise in the context of systems with state-dependent multiplicative noise, of great interest for applications in aerospace systems, communication, processing images, and so forth [11]. On the other hand, systems with observation multiplicative noises [12] clearly are special cases of systems with random param- eter measurement matrices. Also, networked systems with Hindawi Publishing Corporation Discrete Dynamics in Nature and Society Volume 2015, Article ID 398605, 10 pages http://dx.doi.org/10.1155/2015/398605
Transcript of Research Article Distributed Fusion Filtering in Networked...

Research ArticleDistributed Fusion Filtering in Networked Systems withRandom Measurement Matrices and Correlated Noises
Raquel Caballero-Aacuteguila1 Irene Garciacutea-Garrido2 and Josefa Linares-Peacuterez2
1Departamento de Estadıstica Universidad de Jaen Paraje Las Lagunillas 23071 Jaen Spain2Departamento de Estadıstica Universidad de Granada Avenida Fuentenueva 18071 Granada Spain
Correspondence should be addressed to Josefa Linares-Perez jlinaresugres
Received 8 September 2015 Accepted 18 November 2015
Academic Editor Xiaohua Ding
Copyright copy 2015 Raquel Caballero-Aguila et alThis is an open access article distributed under theCreativeCommonsAttributionLicense which permits unrestricted use distribution and reproduction in anymedium provided the originalwork is properly cited
The distributed fusion state estimation problem is addressed for sensor network systems with random state transition matrix andrandom measurement matrices which provide a unified framework to consider some network-induced random phenomena Theprocess noise and all the sensor measurement noises are assumed to be one-step autocorrelated and different sensor noises are one-step cross-correlated also the process noise and each sensor measurement noise are two-step cross-correlated These correlationassumptions cover many practical situations where the classical independence hypothesis is not realistic Using an innovationmethodology local least-squares linear filtering estimators are recursively obtained at each sensorThe distributed fusionmethod isthen used to form the optimalmatrix-weighted sum of these local filters according to themean squared error criterion A numericalsimulation example shows the accuracy of the proposed distributed fusion filtering algorithm and illustrates some of the network-induced stochastic uncertainties that can be dealt with in the current system model such as sensor gain degradation missingmeasurements and multiplicative noise
1 Introduction
In recent years information and communication technolo-gies have experienced a fast development making the useof sensor networks become very popular for measurementacquisition and data processing as they usually providemoreinformation than traditional single-sensor communicationsystems For this reason the study of the estimation problemin sensor network stochastic systems has achieved great inter-est inmany important research fields of engineering comput-ing and mathematics mainly by their broad scope of appli-cations (target tracking environment observation habitatmonitoring animal tracking communications etc)
Although fusion algorithms have been proposed accord-ing to differentmethods (see eg [1ndash3])most existing resultsdo not consider the new problems that arise inevitably insensor network systems due to the restrictions of the physicalequipmentmainly the limitations of bandwidth channels anduncertainties in the external environment in both themodel-ing process and the transmission of informationThese situa-tions can dramatically worsen the quality of fusion estimators
designed Multiplicative noise uncertainties random delayspacket dropouts and missing measurements are some of themost common problems that motivated the need to developnew estimation algorithms Therefore it is not surprisingthat in the past few years the study of the state estimationproblem in network systems with only one or several of theaforementioned uncertainties has become an active researcharea (see eg [4ndash9] and the references therein)
Clearly some of these situations with network-inducedphenomena are special cases of systems with transitionandor measurement random parameter matrices whichhave important practical significance and arise in manyapplication areas such as digital control of chemical processesradar control navigation systems or economic systems [10]On the one hand random state transition matrices arise inthe context of systems with state-dependent multiplicativenoise of great interest for applications in aerospace systemscommunication processing images and so forth [11] On theother hand systems with observation multiplicative noises[12] clearly are special cases of systems with random param-eter measurement matrices Also networked systems with
Hindawi Publishing CorporationDiscrete Dynamics in Nature and SocietyVolume 2015 Article ID 398605 10 pageshttpdxdoiorg1011552015398605
2 Discrete Dynamics in Nature and Society
stochastic sensor gain degradation as those considered in [13]or the systems with state and measurement multiplicativenoises in [9] can be rewritten by transition and measurementrandom parameter matrices It must be mentioned that inmany papers (see eg [8]) systems with random delays andpacket dropouts are transformed into systems with randomparametermatrices Consequently these kinds of systems canmodel a great variety of real situations and for this reasonthe estimation problem in this type of system has gained aconsiderable interest in recent years (see eg [14ndash18] and thereferences therein)
Furthermore in the latest research on signal estimationthe fairly conservative assumption that the process andmeasurement noises are uncorrelated is commonlyweakenedas in many practical situations such noises are usuallycorrelated For example when all the sensors operate inthe same noisy environment the sensor noises are usuallycorrelated Likewise when the process noise and the sensornoises are state dependent there may be cross-correlationbetween them as well as between different sensor noisesAlso the augmented systems used to describe random delaysand measurement losses are systems with correlated noisesand discretized continuous-time systems have also inherentlycorrelated noises Hence in both systems with deterministicmatrices and systems with random parameter matrices theestimation problem with correlated and cross-correlatednoises has become a challenging research topic In the firstcase the optimal Kalman filtering fusion problem in systemswith cross-correlated process noises andmeasurement noisesat the same sampling time is addressed for example in [19]and at consecutive sampling times in [8] Under differentcorrelation assumptions of the noises centralized and dis-tributed fusion algorithms are obtained in [11] for systemswith multiplicative noise in the state equation in [9] whenmultiplicative noises exist in both the state and observationequations and in [13] for systems where the measurementsmight have partial information about the signal For systemswith random parameter matrices and autocorrelated andcross-correlated noises many research efforts have beendevoted to the centralized fusion estimation problem [15ndash18] Centralized algorithms are based on a fusion centre ableto receive all the measured data from sensors for being pro-cessed they provide optimal estimators from the measure-ments of all the sensors and hence when all the sensors workcorrectly they have the best accuracy Nevertheless as it isknown the centralized approach has several drawbacks suchas bad robustness poor survivability and reliability heavycommunication and expensive computational cost whichcan be overcome by using distributed approaches In the dis-tributed fusionmethod each sensor estimates the state basedon its own measurement data and these local estimators arecombined according to a certain information fusion criterionTo the best of the authorsrsquo knowledge the distributed fusionestimation problem in networked systems with both randomparameter matrices and autocorrelated and cross-correlatednoises has not been investigated
Motivated by the above considerations this paper dealswith the distributed fusion estimation problem in sensor net-work systems including simultaneously random parameter
matrices and correlated noises in the state-space model Themain contributions of our study can be highlighted as follows(1)The network systemmodel with randomparametermatri-ces considered provides a unified framework to treat somenetwork-induced phenomena such as multiplicative noiseuncertainties missing measurements or sensor gain degra-dation and hence the proposed distributed fusion filter haswide applicability (2) One-step autocorrelation of the noisesand also two-step cross-correlation between the processnoise anddifferent sensor noises are considered (3)The inno-vation technique is used to obtain algorithms for the localleast-squares linear filtering estimators which are recursiveand computationally simple (4) The proposed distributedfusion filter is generated by a matrix-weighted linear combi-nation of the local filtering estimators using themean squarederror as optimality criterion requiring the cross-covariancematrices between any two local filters but not the error cross-covariance matrices as in [1]
The rest of the paper is organized as follows The systemmodel withmultiple sensors and random parameter matricesis presented in Section 2 including a brief description ofthe traditional centralized and distributed fusion estimationmethods The local least-squares linear filtering algorithmsare derived in Section 3 using an innovation approach InSection 4 the proposed distributed fusion filter is obtainedby a matrix-weighted linear combination of the local filteringestimators using the mean squared error as optimality cri-terion A simulation example is given in Section 5 to showthe performance of the proposed estimation algorithms andsome conclusions are drawn in Section 6
Notation The notation used throughout the paper is stan-dardR119899 denotes the 119899-dimensional Euclidean space119860119879 and119860minus1 denote the transpose and inverse of a matrix 119860 respec-
tively The shorthand (1198601 119860
119898) denotes a partitioned
matrix into submatrices 1198601 119860
119898 If a matrix dimension
is not explicitly stated it is assumed to be compatiblefor algebraic operations Moreover for any function 119866
119896119904
depending on the time instants 119896 and 119904 we write119866119896= 119866119896119896
forsimplicity Analogously we write119870(119894) = 119870(119894119894) for any function119870(119894119895) depending on sensors 119894 and 119895 120575
119896-119904 represents theKronecker delta function which is equal to one if 119896 = 119904 andzero otherwise Orthogonal Projection Lemma is abbreviatedas OPL Finally all the random vectors will be defined onthe probabilistic space (ΩA 119875) and for arbitrary randomvectors 119883 and 119884 we denote Cov[119883 119884] = 119864[(119883 minus 119864[119883])(119884 minus119864[119884])
119879
] and Cov[119883] = Cov[119883119883] where 119864[sdot] stands for themathematical expectation operator
2 System Formulation and Problem Statement
Consider the following discrete-time linear stochastic systemwith119898 different sensors
119909119896+1
= 119865119896119909119896+ 119908119896 119896 ge 0 (1)
119910(119894)
119896= 119867(119894)
119896119909119896+ V(119894)119896 119896 ge 1 119894 = 1 2 119898 (2)
Discrete Dynamics in Nature and Society 3
where 119909119896isin R119899119909 is the state vector and 119910(119894)
119896isin R119899119910 is the
output measured by sensor 119894 both at time 119896 119865119896 119896 ge 0 and
119867(119894)
119896 119896 ge 1 are sequences of random parameter matrices
with compatible dimensions 119908119896 119896 ge 0 is the process noise
and V(119894)119896 119896 ge 1 is the measurement noise of the 119894th sensor
21 Model Assumptions The assumptions about the initialstate the randomparametermatrices and the noises involvedin the system model (1)-(2) under which the fusion filteringproblem will be addressed are as follows
(i) The initial state 1199090is a random vector with119864[119909
0] = 1199090
and Cov[1199090] = Σ0
(ii) 119865119896 119896 ge 0 and 119867
(119894)
119896 119896 ge 1 are sequences
of independent random parameter matrices withknown means 119864[119865
119896] = 119865
119896 119864[119867(119894)
119896] = 119867
(119894)
119896 119894 =
1 2 119898 and the covariances of their entriesCov[119891
119901119902(119896) 11989111990110158401199021015840(119896)] Cov[ℎ(119894)
119901119886(119896) ℎ(119894)
119902119887(119896)] are also
assumed to be known 119891119901119902(119896) denotes the (119901 119902)th
entry of matrix 119865119896 for 119901 119902 = 1 2 119899
119909 and ℎ(119894)
119901119902(119896)
denotes the (119901 119902)th entry of119867(119894)119896 for 119901 = 1 2 119899
119909
and 119902 = 1 2 119899119910
(iii) The noises 119908119896 119896 ge 0 and V(119894)
119896 119896 ge 1 119894 = 1 2
119898 are zero-mean sequences with known covari-ances and cross-covariances
Cov [119908119896 119908119904] = 119876119896119904(120575119896minus119904+ 120575119896minus119904+1
+ 120575119896minus119904minus1
)
Cov [V(119894)119896 V(119895)119904] = 119877(119894119895)
119896119904(120575119896minus119904+ 120575119896minus119904+1
+ 120575119896minus119904minus1
)
Cov [119908119896 V(119894)119904] = 119878(119894)
119896119904(120575119896minus119904+ 120575119896minus119904+1
+ 120575119896minus119904+2
)
(3)
(iv) For 119894 = 1 2 119898 the initial state 1199090and the
processes 119865119896 119896 ge 0 and 119867(119894)
119896 119896 ge 1 are mutually
independent and they are independent of the additivenoises 119908
119896 119896 ge 0 and V(119894)
119896 119896 ge 1
Remark 1 By denoting 119865119896= 119865119896minus 119865119896 (119894)119896= 119867(119894)
119896minus 119867
(119894)
119896
119894 = 1 2 119898 and 119863 an arbitrary deterministic matrix thefollowing identities hold for (119901 119902)th entries of the matrices119864[119865119896119863119865119879
119896] and 119864[(119894)
119896119863(119894)119879
119896]
(119864 [119865119896119863119865119879
119896])119901119902
=
119899119909
sum
119886=1
119899119909
sum
119887=1
Cov [119891119901119886(119896) 119891
119902119887(119896)]119863
119886119887
119901 119902 = 1 2 119899119909
(119864 [(119894)
119896119863(119894)119879
119896])119901119902
=
119899119909
sum
119886=1
119899119909
sum
119887=1
Cov [ℎ(119894)119901119886(119896) ℎ
(119894)
119902119887(119896)]119863
119886119887
119901 119902 = 1 2 119899119910
(4)
Remark 2 Assumptions (i)ndash(iii) lead to the following recur-sive formula forD
119896equiv 119864[119909
119896119909119879
119896] the correlation matrix of the
state vector 119909119896(see eg [15])
D119896+1
= 119865119896D119896119865
119879
119896+ 119864 [119865
119896D119896119865119879
119896] + 119876119896+ 119865119896119876119896minus1119896
+ 119876119896119896minus1
119865
119879
119896 119896 ge 1
D1= 1198650D0119865
119879
0+ 119864 [119865
0D0119865119879
0] + 1198760
D0= Σ0+ 1199090119909119879
0
(5)
Remark 3 The following correlation properties of the vectornoises 119908
119896and V(119894)119896
are easily inferred from assumptions (iii)-(iv)
(i) For 119894 = 1 2 119898 the noise vector119908119896is uncorrelated
with the observations 119910(119894)1 119910
(119894)
119896minus1and correlated
with 119910(119894)119896 with
W(119894)
119896equiv 119864 [119908
119896119910(119894)119879
119896] = 119876
119896119896minus1119867
(119894)119879
119896+ 119878(119894)
119896 119896 ge 1 (6)
(ii) For 119894 119895 = 1 2 119898 the noise vector V(119894)119896
is uncor-related with the observations 119910(119895)
1 119910
(119895)
119896minus2and corre-
lated with 119910(119895)119896minus1
with
V(119894119895)
119896119896minus1equiv 119864 [V(119894)
119896119910(119895)119879
119896minus1] = 119878(119894)119879
119896minus2119896119867
(119895)119879
119896minus1+ 119877(119894119895)
119896119896minus1 119896 ge 2 (7)
Our aim is to address the optimal least-squares (LS)linear filtering problem of state 119909
119896by fusing effectively the
observations 119910(119894)1 119910
(119894)
119896 119894 = 1 2 119898 specifically we use
the traditional centralized and distributed fusion methodsIn the centralized fusion method all the measurement datacoming from 119898 sensors are used in the fusion center for thestate estimation while in the distributed fusion method theobservations in the fusion center are replaced by the estimatesthat have been locally computed As it is known the maindrawbacks of the first one are the expensive computationalcost and poor robustness and flexibility while the latterovercomes these disadvantages and provides greater accuracythan the local estimators
22 Centralized Fusion Algorithm Combining 119898 measure-ment equations given by (2) and setting 119910
119896= (119910(1)119879
119896
119910(119898)119879
119896)119879 the discrete-time multisensor system with random
parameter matrices and correlated additive noises (1)-(2)considered in this paper is a special case of the discrete-time stochastic system with random parameter matrices andcorrelated additive noises considered in [17] Hence theoptimal centralized fusion filter could be obtained by theoptimal LS linear filtering algorithm in [17]
23 Distributed Fusion Algorithm The distributed fusionmethod computes at each sensor a local optimal LS linearstate filter using its own measurement data and subse-quently the fusion center computes the LS matrix-weighted
4 Discrete Dynamics in Nature and Society
linear combination of the local filtering estimators Hencethe distributed fusion filtering algorithm is performed in twosteps In the first one (Section 3) for each 119894 = 1 2 119898 alocal LS linear estimator of the signal 119909
119896 denoted by 119909(119894)
119896119896 is
produced using themeasurements119910(119894)1 119910
(119894)
119896 by a recursive
algorithm In the second step (Section 4) a fusion distributedestimator 119909(119863)
119896119896 is generated by a matrix-weighted linear
combination of the local estimators 119909(119894)119896119896
119894 = 1 2 119898using the mean squared error as optimality criterion
3 Local LS Linear Filtering Algorithm
This section is concerned with the problem of obtaining arecursive algorithm for the local LS linear filter at each sensor119894 for 119894 = 1 119898 by using an innovation approach
Theorem4 For system (1)-(2) under assumptions (i)ndash(iv) thelocal LS linear filter 119909(119894)
119896119896 is given by
119909(119894)
119896119896= 119909(119894)
119896119896minus1+X(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119909
(119894)
00= 1199090 (8)
where the one-stage state predictor 119909(119894)119896119896minus1
satisfies
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+W(119894)
119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2
119909(119894)
10= 11986501199090
(9)
The filtering error covariance matrix Σ(119894)119896119896
is given by
Σ(119894)
119896119896= Σ(119894)
119896119896minus1minusX(119894)
119896Π(119894)minus1
119896X(119894)119879
119896 119896 ge 1 Σ
(119894)
00= Σ0 (10)
where the prediction error covariance matrix Σ(119894)119896119896minus1
is calcu-lated by
Σ(119894)
119896119896minus1= 119865119896minus1Σ(119894)
119896minus1119896minus1119865
119879
119896minus1+ 119864 [119865
119896minus1D119896minus1119865119879
119896minus1]
+ 119876119896minus1+ 119865119896minus1
J(119894)
119896minus1+J(119894)119879
119896minus1119865
119879
119896minus1
minusW(119894)
119896minus1Π(119894)minus1
119896minus1W(119894)119879
119896minus1 119896 ge 2
Σ(119894)
10= 1198650Σ00119865
119879
0+ 119864 [119865
0D0119865119879
0] + 1198760
(11)
with
J(119894)
119896= 119876119896minus1119896
minusX(119894)
119896Π(119894)minus1
119896W(119894)119879
119896 119896 ge 1 (12)
The matrixX(119894)119896is obtained by
X(119894)
119896= Σ(119894)
119896119896minus1119867
(119894)119879
119896+M(119894)
119896 119896 ge 1 (13)
whereM(119894)119896is given by
M(119894)
119896= 119865119896minus1119878(119894)
119896minus2119896+ 119878(119894)
119896minus1119896minusX(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1
119896 ge 2
M(119894)
1= 119878(119894)
01
(14)
with
X(119894)
119896119896minus1= 119865119896minus1
X(119894)
119896minus1+W(119894)
119896minus1 119896 ge 2 (15)
The innovation 120583(119894)119896 is given by
120583(119894)
119896= 119910(119894)
119896minus 119867
(119894)
119896119909(119894)
119896119896minus1minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2
120583(119894)
1= 119910(119894)
1minus 119867
(119894)
1119909(119894)
10
(16)
and the innovation covariance matrix Π(119894)119896 satisfies
Π(119894)
119896= 119864 [
(119894)
119896D119896(119894)119879
119896] + 119867
(119894)
119896X(119894)
119896+M(119894)119879
119896119867
(119894)119879
119896
+ 119877(119894)
119896minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
Π(119894)
1= 119864 [
(119894)
1D1(119894)119879
1] + 119867
(119894)
1X(119894)
1+M(119894)119879
1119867
(119894)119879
1
+ 119877(119894)
1
(17)
The matrices D119896 W(119894)119896 and V
(119894)
119896119896minus1are given in (5) (6) and
(7) respectively
Proof See Appendix
The computational procedure of the proposed local LSlinear filtering algorithm can be summarized as follows
The matrices W(119894)119896
and V(119894)
119896119896minus1are computed by expres-
sions (6) and (7) respectively We obtain D119896recursively by
(5) where thematrix119864[119865119896minus1
D119896minus1119865119879
119896minus1] necessary to compute
D119896and Σ(119894)
119896119896minus1 is obtained as indicated in Remark 1 The
matrix 119864[(119894)119896D119896(119894)119879
119896] is also computed in order to obtain
the innovation covariance matrix Π(119894)119896 Note that all these
matrices depend only on the system model information andcan be obtained before the observations are available
At the sampling time 119896 once (119896minus1)th iteration is finishedand the new observation 119910(119894)
119896is available starting with the
prior knowledge including X(119894)
119896minus1 120583(119894)119896minus1
Π(119894)119896minus1
119909(119894)119896119896minus1
andΣ(119894)
119896119896minus1 the proposed filtering algorithm operates as follows
Step 1 From (15) X(119894)119896119896minus1
is computed and from it M(119894)119896
isprovided by (14) and thenX
(119894)
119896is obtained by (13)
Step 2 The innovation 120583(119894)119896
and its covariance matrix Π(119894)119896are
computed by (16) and (17) respectively
Step 3 The filter 119909(119894)119896119896
and the filtering error covariancematrix Σ(119894)
119896119896 are computed by (8) and (10) respectively
Step 4 To implement the above steps at time 119896 + 1 we must
(1) compute the state predictor 119909(119894)119896+1119896
by (9)
(2) compute J(119894)
119896by (12) and from this the prediction
error covariance matrix Σ(119894)119896+1119896
by (11)
Discrete Dynamics in Nature and Society 5
4 Distributed Fusion Filtering Estimators
Once the local LS linear filters 119909(119894)119896119896
for each sensor 119894 =1 2 119898 have been obtained our objective in this section isto design a distributed fusion filter119909(119863)
119896119896 by amatrix-weighted
linear combination of such estimators which minimizes themean squared estimation error To simplify the derivationof the proposed fusion estimators we previously presentsome useful lemmas that provide the expectations 119870(119894119895)
119896119896minus1=
119864[119909(119894)
119896119896minus1119909(119895)119879
119896119896minus1] 119871(119894119895)119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] and Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)
119896]
necessary for subsequent calculations The assumptions andnotation in these lemmas are those of Section 3
41 Preliminary Results
Lemma 5 For 119894 119895 = 1 2 119898 the cross-covariancematrix between any two local state predictors 119870(119894119895)
119896119896minus1=
119864[119909(119894)
119896119896minus1119909(119895)119879
119896119896minus1] satisfies
119870(119894119895)
119896119896minus1= 119865119896minus1119870(119894119895)
119896minus1119896minus2119865
119879
119896minus1+ 119865119896minus1119871(119894119895)
119896minus1Π(119895)minus1
119896minus1X(119895)119879
119896119896minus1
+X(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1Π(119895)minus1
119896minus1X(119895)119879
119896119896minus1
+X(119894)
119896119896minus1Π(119894)minus1
119896minus1119871(119895119894)119879
119896minus1119865
119879
119896minus1 119896 ge 2 119894 = 119895
119870(119894119895)
10= 11986501199090119909119879
0119865
119879
0
119870(119894)
119896119896minus1= D119896minus Σ(119894)
119896119896minus1 119896 ge 1
(18)
Proof Using (A7) and the fact that 119871(119894119895)119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] and
Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)
119896] the proof of this lemma is immediately
clear
Lemma 6 For 119894 119895 = 1 2 119898 and 119894 = 119895 the expectation119871(119894119895)
119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] satisfies
119871(119894119895)
119896= (119870(119894)
119896119896minus1minus 119870(119894119895)
119896119896minus1)119867
(119895)119879
119896+X(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1
minus 119871(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1 119896 ge 2
119871(119894119895)
1= 0
(19)
where 119871(119894119895)119896119896minus1
= 119864[119909(119894)
119896119896minus1120583(119895)119879
119896minus1] is given by
119871(119894119895)
119896119896minus1= 119865119896minus1119871(119894119895)
119896minus1+X(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1 119896 ge 2 (20)
Proof Taking into account expression (16) for 120583(119895)119896 we have
that
119871(119894119895)
119896= 119864 [119909
(119894)
119896119896minus1119910(119895)119879
119896] minus 119870(119894119895)
119896119896minus1119867
(119895)119879
119896
minus 119871(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1
(21)
Now using (2) for 119910(119895)119896 (A7) for 119909(119894)
119896119896minus1 and the OPL we
obtain
119864 [119909(119894)
119896119896minus1119910(119895)119879
119896] = 119870
(119894)
119896119896minus1119867
(119895)119879
119896+X(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1 (22)
From the above relations the expression for 119871(119894119895)119896
is immedi-ately derived
Using again (A7) for 119909(119894)119896119896minus1
expression for 119871(119894119895)119896119896minus1
is alsoimmediately clear and the proof is completed
Lemma 7 For 119894 119895 = 1 2 119898 and 119894 = 119895 the innovationcross-covariance matrix Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)119879
119896] satisfies
Π(119894119895)
119896= 119867
(119894)
119896(X(119895)
119896minus 119871(119894119895)
119896) +M
(119895119894)119879
119896119867
(119895)119879
119896+ 119877(119894119895)
119896
minusV(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119895119894)119879
119896119896minus1 119896 ge 2
Π(119894119895)
1= 119867
(119894)
1(X(119895)
1minus 119871(119894119895)
1) +M
(119895119894)119879
1119867
(119895)119879
1+ 119877(119894119895)
1
(23)
whereM(119894119895)119896= 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119895)119879119896] is given by
M(119894119895)
119896= 119865119896minus1119878(119895)
119896minus2119896+ 119878(119895)
119896minus1119896minusX(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1
119896 ge 2
M(119894119895)
1= 119878(119895)
01
(24)
and Π(119894119895)119896119896minus1
= 119864[120583(119894)
119896120583(119895)119879
119896minus1] is obtained by
Π(119894119895)
119896119896minus1= 119867
(119894)
119896(X(119895)
119896119896minus1minus 119871(119894119895)
119896119896minus1) +V
(119894119895)
119896119896minus1
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1 119896 ge 2
(25)
Proof Using (16) for the innovation 120583(119894)119896 it is clear that
Π(119894119895)
119896= 119864 [119910
(119894)
119896120583(119895)119879
119896] minus 119867
(119894)
119896119871(119894119895)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1119864 [120583(119894)
119896minus1120583(119895)119879
119896]
(26)
Similar reasoning to that used to obtain (17) yields
119864 [119910(119894)
119896120583(119895)119879
119896] = 119867
(119894)
119896X(119895)
119896+M(119895119894)119879
119896119867
(119895)119879
119896+ 119877(119894119895)
119896
minusV(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1 119896 ge 2
119864 [119910(119894)
1120583(119895)119879
1] = 119867
(119894)
1X(119894)
1+M(119895119894)119879
1119867
(119895)119879
1+ 119877(119894119895)
1
(27)
So the expression for Π(119894119895)119896
is immediately derived Theexpression forΠ(119894119895)
119896119896minus1is obtained by analogous reasoning
42 Distributed Fusion Filter Design Aswe have already indi-cated our goal is to obtain a distributed fusionfilter119909(119863)
119896119896 gen-
erated by aweighted sumof the local estimatorssum119898119894=1119865(119894)
119896119909(119894)
119896119896
in which the weight matrices 119865(119894)119896 119894 = 1 2 119898 are com-
puted to minimize the mean squared estimation errorSo by denoting 119883
119896119896= (119909(1)119879
119896119896 119909
(119898)119879
119896119896)119879 and F
119896=
(119865(1)
119896 119865
(119898)
119896) the aim is to findF
119896such that the estimator
F119896119883119896119896
minimizes
119864 [(119909119896minusF119896119883119896119896) (119909119896minusF119896119883119896119896)
119879
] (28)
6 Discrete Dynamics in Nature and Society
As it is well known the solution of this problem is given bythe matrix
Fopt119896= 119864 [119909
119896119883119879
119896119896] (119864 [119883
119896119896119883119879
119896119896])
minus1
119896 ge 1 (29)
The following theorem provides the proposed distributedfusion filtering estimators 119909(119863)
119896119896 and their error covariance
matrices Σ(119863)119896119896
Theorem 8 Let 119883119896119896
= (119909(1)119879
119896119896 119909
(119898)119879
119896119896)119879 be the vector
formed by the local LS filtering estimators calculated inTheorem 4 Then the distributed fusion filter is given by
119909(119863)
119896119896= Ξ119896119896119870minus1
119896119896119883119896119896 119896 ge 1 (30)
where
119870119896119896= (119870(119894119895)
119896119896)119894119895=1119898
Ξ119896119896= (119870(1)
119896119896 119870
(119898)
119896119896)
(31)
and 119870(119894119895)119896119896= 119864[119909
(119894)
119896119896119909(119895)119879
119896119896] 119894 119895 = 1 2 119898 are computed by
119870(119894119895)
119896119896= 119870(119894119895)
119896119896minus1+ 119871(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896+X(119894)
119896Π(119894)minus1
119896119871(119895119894)119879
119896
+X(119894)
119896Π(119894)minus1
119896Π(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896
119896 ge 1 119894 = 119895
119870(119894)
119896119896= D119896minus Σ(119894)
119896119896 119896 ge 1
(32)
with 119870(119894119895)119896119896minus1
119871(119894119895)119896 and Π(119894119895)
119896given in Lemmas 5 6 and 7
respectivelyThe error covariance matrices of the distributed fusion
filtering estimators are computed by
Σ(119863)
119896119896= D119896minus Ξ119896119896119870minus1
119896119896Ξ119879
119896119896 119896 ge 1 (33)
Proof Expressions (30) and (33) for the distributed estima-tors and their error covariance matrices respectively areimmediately derived from (29) Expression (32) for the cross-covariancematrices between local filtering estimators followseasily using expression (8) of such estimators
5 Numerical Simulation Example
Consider the following discrete-time linear networked sys-tem with state-dependent multiplicative noise and scalarmeasurements from four sensors
119909119896= (095 + 02120598
119896minus1) 119909119896minus1+ 119908119896minus1 119896 ge 1
119910(119894)
119896= 119867(119894)
119896119909119896+ V(119894)119896 119896 ge 1 119894 = 1 2 3 4
(34)
where 120598119896 119896 ge 0 is a zero-meanGaussianwhite process with
unit varianceThe additive noises are defined as119908119896= 06(120578
119896+
120578119896+1) and V(119894)
119896= 119888(119894)
119896(120578119896minus1
+ 120578119896) 119894 = 1 2 3 4 where 119888(1)
119896= 1
119888(2)
119896= 05 119888(3)
119896= 075 and 119888(4)
119896= 085 and 120578
119896 119896 ge 0 is a
zero-mean Gaussian white process with variance 05
For 119894 = 1 2 3 4 the random parameter matrices119867(119894)119896
aredefined as follows
(i) 119867(1)119896
= 082120582(1)
119896 where 120582(1)
119896 119896 ge 1 is a sequence
of independent and identically distributed (iid) ran-dom variables uniformly distributed over [03 07]
(ii) 119867(2)119896= 075120582
(2)
119896 where 120582(2)
119896 119896 ge 1 is a sequence of
iid discrete randomvariables with119875[120582(2)119896= 0] = 01
119875[120582(2)
119896= 05] = 05 and 119875[120582(2)
119896= 1] = 04
(iii) 119867(3)119896
= 074120582(3)
119896 where 120582(3)
119896 119896 ge 1 is a Bernoulli
process with 119875[120582(3)119896= 1] = 119901
(3) forall119896
(iv) 119867(4)119896= 120582(4)
119896(075 + 095120585
119896) where 120582(4)
119896 119896 ge 1 is a
Bernoulli process with 119875[120582(4)119896= 1] = 119901
(4) forall119896 and120585119896 119896 ge 0 is a zero-mean Gaussian white process
with unit varianceNote that the random parameter matrices at each sensor
119867(119894)
119896 allow modeling different types of uncertainty Namely
in sensors 1 and 2 as in [13] the scalar random variables 120582(119894)119896
take values over the interval [0 1] and represent continuousand discrete stochastic sensor gain degradation respectivelyIn sensor 3120582(3)
119896are Bernoulli randomvariables thus covering
the phenomenon of missing measurements with 120582(3)119896= 1
meaning that the signal 119909119896is present in the measurement 119910(3)
119896
coming from the third sensor at time 119896 while 120582(119894)119896= 0means
that the signal is missing in the measured data at time 119896 orequivalently that such observation is only noise V(3)
119896 Finally
as in [5] bothmissingmeasurements andmultiplicative noiseare considered in sensor 4
To illustrate the feasibility and effectiveness of the pro-posed algorithms they were implemented in MATLAB andone hundred iterations of the algorithms were run Usingsimulated values both centralized and distributed filteringestimates were calculated as well as the corresponding errorvariances in order to measure the estimation accuracy
The error variances of the local centralized and dis-tributed fusion filters are compared considering fixed values119901(3)
= 05 119901(4) = 075 In Figure 1 we can see that theerror variances of the distributed fusion filter are significantlysmaller than those of every local filter but lightly greaterthan those of the centralized filter Nevertheless althoughthe centralized fusion filter outperforms the distributed onethis difference is slight and both filters perform similarly andprovide good estimations Besides this slight difference iscompensated by the fact that the distributed fusion structurereduces the computational cost and has the advantage ofbetter robustness and fault tolerance For example assumingthat the fourth sensor is faulty and themeasurement equationis given by 119910(4)
119896= 119867(4)
119896119909119896+ V(4)119896+ 119886119896 where 119886
119896= 05119896 for
50 le 119896 le 70 and 119886119896= 0 otherwise Figure 2 displays the
corresponding filtering mean square errors of one thousandindependent simulations at each sampling time 119896 showingthat the distributed fusion method has better fault-toleranceabilities than the centralized one
Next we analyze the centralized and distributed filteringaccuracy in function of the probabilities 119901(3) and 119901(4) of
Discrete Dynamics in Nature and Society 7
Centralized filtering error variancesDistributed filtering error variancesLocal filtering error variances (sensor 1)Local filtering error variances (sensor 2)Local filtering error variances (sensor 3)Local filtering error variances (sensor 4)
10 20 30 40 50 60 70 80 90 1000Iteration k
0
05
1
15
2
25
3
35
Filte
ring
erro
r var
ianc
es
Figure 1 Error variance comparison of the centralized distributedand local filtering estimators
MSE centralized filterMSE distributed filter
10 20 30 40 50 60 70 80 90 1000Iteration k
0
1
2
3
4
5
6
7
8
Mea
n sq
uare
erro
rs
Figure 2 Centralized and distributed filtering mean square errors
the Bernoulli variables that model uncertainties of the obser-vations coming from sensors 3 and 4 respectively Specifi-cally the filter performances are analyzed when 119901(3) is variedfrom 01 to 09 and different values of 119901(4) are consideredSince the behavior of the error variances is analogous in allthe iterations only the results of a specific iteration (119896 = 100)
Distributed error variances
Centralized error variances
05
055
06
065
07
075
08
Filte
ring
erro
r var
ianc
es
p(4) = 03
p(4) = 05
p(4) = 07
p(4) = 09
050302 0604 0807 0901Probability p(3)
Figure 3 Centralized and distributed filtering error variances at 119896 =100 versus 119901(3) when 119901(4) = 03 05 07 and 09
are shown here In Figure 3 the centralized and distributedfiltering error variances are displayed versus 119901(3) for 119901(4) =03 05 07 and 09 As expected from this figure it isconcluded that as 119901(3) or 119901(4) increase the centralized anddistributed error variances both become smaller and hencethe performance of the centralized and distributed filtersimproves as these probabilities increase
Finally to evaluate the performance of the proposed fil-ters in comparisonwith other filters reported in the literaturethe filtering mean square error (MSE) at each sampling time119896 is calculated To compute the MSE one thousand indepen-dent simulations were considered and one hundred iterationsof each algorithm were performed considering the values119901(3)
= 05119901(4) = 075 A comparative analysis was carried outbetween the proposed centralized and distributed filters andthe following filters
(i) The centralized Kalman filter for systems with inde-pendent additive noises
(ii) The centralized filter for multisensor systems withmultiplicative noises in the state and observationequations missing measurements and noise correla-tion at the same sampling time [5]
(iii) The centralized filter for networked systems withmultiplicative noise in the state equation stochasticsensor gain degradation and independent additivenoises [13]
The results of these comparisons are displayed in Figure 4which shows that the proposed centralized and distributedfilters perform better than the other three centralized filtersTheKalmanfilter provides theworst estimations since neithermultiplicative noises nor missing measurements are taken
8 Discrete Dynamics in Nature and Society
Centralized Kalman filter Filter in [13]Filter in [5]Proposed centralized filter
Proposed distributed filter
0
05
1
15
2
25
3
35
4
45
Mea
n sq
uare
erro
rs
10 20 30 40 50 60 70 80 90 1000Iteration k
Figure 4 Mean square errors when 119901(3) = 05 119901(4) = 075
into accountThe performance of the filter in [5] is better thanthat of the filter in [13] since the latter ignores any correlationassumption and multiplicative observation noise in sensor 4is not taken into account
6 Conclusion
Thedistributed fusion filtering problemhas been investigatedfor multisensor stochastic systems with random parametermatrices and correlated noises The main outcomes andresults can be summarized as follows
(i) Recursive algorithms for the local LS linear filters ofthe system state based on the measured output datacoming from each sensor have been designed by aninnovation approach The computational procedureof these local filtering algorithms is very simple andsuitable for online applications
(ii) Once the local filters have been obtained a distributedfusion filter has been designed as thematrix-weightedsum of such local estimators which minimizes themean squared estimation error The error covariancematrices of such distributed fusion filter have beenalso derived
(iii) A numerical simulation example has illustrated theusefulness of the proposed results Error variancecomparison has shown that both the centralized andthe distributed filters outperform the local ones thisexample has also shown that the slight superiorityof the centralized filter over the distributed filter iscompensated by better robustness and fault-toleranceabilities of the latter This example has also high-lighted the applicability of the proposed algorithmfor a great variety of multisensor systems featuring
network-induced stochastic uncertainties such assensor gain degradation missing measurements ormultiplicative observation noises which can be dealtwith in the observation model considered in thispaper
A challenging further research topic is to address the esti-mation problem for this kind of system with random param-eter matrices considering a sensor network whose nodes aredistributed according to a given topology characterized by adirected graph Also an interesting future research topic is toconsider other kinds of stochastic uncertainties which oftenappear in networked systems such as random delays andpacket dropouts
Appendix
Proof of Theorem 4
This appendix provides the proof of Theorem 4 by aninnovation approach For the 119894th sensor the innovation attime 119896 is defined as 120583(119894)
119896= 119910(119894)
119896minus 119910(119894)
119896119896minus1 where 119910(119894)
119896119896minus1is
the LS linear estimator of 119910(119894)119896
based on measurements 119910(119894)119904
119904 le 119896minus1 Replacing the observation process by the innovationone the LS linear estimator (119894)
119896119871 of a random vector 119911
119896based
on the observations 119910(119894)1 119910
(119894)
119871 can be calculated as linear
combination of the innovations 120583(119894)1 120583
(119894)
119871 namely
(119894)
119896119871=
119871
sum
119904=1
119864 [119911119896120583(119894)119879
119904] (119864 [120583
(119894)
119904120583(119894)119879
119904])
minus1
120583(119894)
119904 119896 ge 1 (A1)
From system equations (1)-(2) and the OPL the statepredictor 119909(119894)
119896119896minus1 and the observation predictor 119910(119894)
119896119896minus1 verify
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+ 119908(119894)
119896minus1119896minus1 119896 ge 1 (A2)
119910(119894)
119896119896minus1= 119867
(119894)
119896119909(119894)
119896119896minus1+ V(119894)119896119896minus1
119896 ge 1 (A3)
Because of the correlation assumption (iii) the noise filter119908(119894)
119896119896and the one-stage noise predictor V(119894)
119896119896minus1are not equal
to zero and hence expressions for such estimators must becalculated
LS Linear Noise Estimators 119908(119894)119896119896
and V(119894)119896119896minus1
From the generalexpression for estimators (A1) taking into account the factthat by Remark 3
119864 [119908119896120583(119894)119879
119896] = 119864 [119908
119896119910(119894)119879
119896] =W
(119894)
119896
119864 [V(119894)119896120583(119894)119879
119896minus1] = 119864 [V(119894)
119896119910(119894)119879
119896minus1] =V
(119894)
119896119896minus1
(A4)
we have that the noise filter 119908(119894)119896119896
and the one-stage noisepredictor V(119894)
119896119896minus1 satisfy
119908(119894)
119896119896=W(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119908
(119894)
00= 0 (A5)
V(119894)119896119896minus1
=V(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 V(119894)
10= 0 (A6)
Discrete Dynamics in Nature and Society 9
Now we will prove the local filtering algorithm by severalsteps
(I) Derivation of the Filter (8) One-Stage State Predictor (9)andTheir Error CovarianceMatrices (10) and (11) RespectivelyFrom (A1) by denoting X
(119894)
119896= 119864[119909
119896120583(119894)119879
119896] and Π(119894)
119896=
119864[120583(119894)
119896120583(119894)119879
119896] expression (8) for the filter is obvious and from
this relation and theOPL we obtain (10) for the filtering errorcovariance
From (A2) and (A5) expression (9) withW(119894)119896satisfying
(6) for the state predictor is immediately obtained Thisexpression together with state equation (1) leads to (11) for theprediction error covariance matrix whereD
119896is given by (5)
andJ(119894)
119896= 119864[(119909
119896minus 119909(119894)
119896119896)119908119879
119896] clearly satisfies (12)
(II) Derivation of (13) for the Matrix X(119894)119896= 119864[119909
119896120583(119894)119879
119896] From
(8) and (9) the following recursive expression for the statepredictor is obtained
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus2+X(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 (A7)
where from (1) thematrixX(119894)119896119896minus1
= 119864[119909119896120583(119894)119879
119896minus1] clearly verifies
(15)Using relation (A7) and again (1) we obtain that the
correlation between the prediction error and the noiseM(119894)
119896equiv 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119894)119879119896] satisfies (14) This correlation
property allows us to obtain easily expression (13) for thematrixX(119894)
119896= 119864[119909
119896120583(119894)119879
119896] Indeed by the OPL we haveX(119894)
119896=
119864[(119909119896minus119909(119894)
119896119896minus1)119910(119894)119879
119896] and from (2) expression (13) forX(119894)
119896is
obtained
(III) Derivation of Innovation (16) and Its Covariance Matrix(17) From (A3) and (A6) it is clear that the innovation isgiven by (16) withV(119894)
119896119896minus1satisfying (7) Next expression (17)
for Π(119894)119896= 119864[120583
(119894)
119896120583(119894)119879
119896] is derived From the OPL and (2) we
have that
Π(119894)
119896= 119864 [119910
(119894)
119896120583(119894)119879
119896]
= 119867
(119894)
119896119864 [119909119896120583(119894)119879
119896] + 119864 [
(119894)
119896119909119896120583(119894)119879
119896]
+ 119864 [V(119894)119896120583(119894)119879
119896]
(A8)
(i) Again from the OPL and (2) and the conditionalexpectation properties
119864 [(119894)
119896119909119896120583(119894)119879
119896] = 119864 [
(119894)
119896119909119896119909119879
119896(119894)119879
119896]
= 119864 [(119894)
119896D119896(119894)119879
119896] 119896 ge 1
(A9)
(ii) Using (16) for 120583(119894)119896 with (2) for 119910(119894)
119896 we obtain that
119864 [V(119894)119896120583(119894)119879
119896] =M
(119894)119879
119896119867
(119894)119879
119896+ 119877(119894)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
119864 [V(119894)1120583(119894)119879
1] =M
(119894)119879
1119867
(119894)119879
1+ 119877(119894)
1
(A10)
Substituting the above expectations into (A8) we easilyobtain (17) and the proof is completed
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This research is supported by Ministerio de Economıa yCompetitividad (Grant no MTM2014-52291-P and FPU pro-gramme)
References
[1] S-L Sun ldquoMulti-sensor optimal information fusion Kalmanfilters with applicationsrdquo Aerospace Science and Technology vol8 no 1 pp 57ndash62 2004
[2] X Sun and G Yan ldquoDistributed state fusion Kalman predictorbased onWLS algorithmrdquoProcedia Engineering vol 29 pp 216ndash222 2012
[3] C Ran andZDeng ldquoSelf-tuningweightedmeasurement fusionKalman filtering algorithmrdquo Computational Statistics amp DataAnalysis vol 56 no 6 pp 2112ndash2128 2012
[4] Y Song G Wei and G Yang ldquoDistributed 119867infin
filtering for aclass of sensor networks with uncertain rates of packet lossesrdquoSignal Processing vol 104 pp 143ndash151 2014
[5] J Ma and S Sun ldquoCentralized fusion estimators for multi-sensor systems withmultiplicative noises andmissingmeasure-mentsrdquo Journal of Networks vol 7 no 10 pp 1538ndash1545 2012
[6] L Li and Y Xia ldquoUnscented kalman filter over unreliable com-munication networks with markovian packet dropoutsrdquo IEEETransactions on Automatic Control vol 58 no 12 pp 3224ndash3230 2013
[7] X He Z Wang X Wang and D H Zhou ldquoNetworked strongtracking filteringwithmultiple packet dropouts algorithms andapplicationsrdquo IEEE Transactions on Industrial Electronics vol61 no 3 pp 1454ndash1463 2014
[8] S Wang H Fang and X Tian ldquoRecursive estimation for non-linear stochastic systems with multi-step transmission delaysmultiple packet dropouts and correlated noisesrdquo Signal Process-ing vol 115 pp 164ndash175 2015
[9] D Chen Y Yu L Xu and X Liu ldquoKalman filtering for discretestochastic systems with multiplicative noises and random two-step sensor delaysrdquoDiscreteDynamics inNature and Society vol2015 Article ID 809734 11 pages 2015
[10] X Shen Y Luo Y Zhu and E Song ldquoGlobally optimaldistributed Kalman filtering fusionrdquo Science China InformationSciences vol 55 no 3 pp 512ndash529 2012
[11] J Feng Z Wang and M Zeng ldquoDistributed weighted robustKalman filter fusion for uncertain systems with autocorrelatedand cross-correlated noisesrdquo Information Fusion vol 14 no 1pp 78ndash86 2013
[12] C Sanchez-Gonzalez and T M Garcıa-Munoz ldquoRecursivelinear estimation for discrete-time systems in the presence ofdifferent multiplicative observation noisesrdquo Discrete Dynamicsin Nature and Society vol 2010 Article ID 875023 12 pages2010
[13] Y Liu X He Z Wang and D Zhou ldquoOptimal filtering fornetworked systems with stochastic sensor gain degradationrdquoAutomatica vol 50 no 5 pp 1521ndash1525 2014
10 Discrete Dynamics in Nature and Society
[14] Y Luo Y Zhu D Luo J Zhou E Song and DWang ldquoGloballyoptimal multisensor distributed random parameter matricesKalman filtering fusion with applicationsrdquo Sensors vol 8 no12 pp 8086ndash8103 2008
[15] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[16] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoCovariance-based estimation from multisensor delayed mea-surements with random parameter matrices and correlatednoisesrdquoMathematical Problems in Engineering vol 2014 ArticleID 958474 13 pages 2014
[17] J Linares-Perez R Caballero-Aguila and I Garcıa-GarridoldquoOptimal linear filter design for systems with correlation inthe measurement matrices and noises recursive algorithm andapplicationsrdquo International Journal of Systems Science vol 45no 7 pp 1548ndash1562 2014
[18] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoOptimal state estimation for networked systems with randomparameter matrices correlated noises and delayed measure-mentsrdquo International Journal of General Systems vol 44 no 2pp 142ndash154 2015
[19] J Feng and M Zeng ldquoOptimal distributed Kalman filteringfusion for a linear dynamic systemwith cross-correlated noisesrdquoInternational Journal of Systems Science vol 43 no 2 pp 385ndash398 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Discrete Dynamics in Nature and Society
stochastic sensor gain degradation as those considered in [13]or the systems with state and measurement multiplicativenoises in [9] can be rewritten by transition and measurementrandom parameter matrices It must be mentioned that inmany papers (see eg [8]) systems with random delays andpacket dropouts are transformed into systems with randomparametermatrices Consequently these kinds of systems canmodel a great variety of real situations and for this reasonthe estimation problem in this type of system has gained aconsiderable interest in recent years (see eg [14ndash18] and thereferences therein)
Furthermore in the latest research on signal estimationthe fairly conservative assumption that the process andmeasurement noises are uncorrelated is commonlyweakenedas in many practical situations such noises are usuallycorrelated For example when all the sensors operate inthe same noisy environment the sensor noises are usuallycorrelated Likewise when the process noise and the sensornoises are state dependent there may be cross-correlationbetween them as well as between different sensor noisesAlso the augmented systems used to describe random delaysand measurement losses are systems with correlated noisesand discretized continuous-time systems have also inherentlycorrelated noises Hence in both systems with deterministicmatrices and systems with random parameter matrices theestimation problem with correlated and cross-correlatednoises has become a challenging research topic In the firstcase the optimal Kalman filtering fusion problem in systemswith cross-correlated process noises andmeasurement noisesat the same sampling time is addressed for example in [19]and at consecutive sampling times in [8] Under differentcorrelation assumptions of the noises centralized and dis-tributed fusion algorithms are obtained in [11] for systemswith multiplicative noise in the state equation in [9] whenmultiplicative noises exist in both the state and observationequations and in [13] for systems where the measurementsmight have partial information about the signal For systemswith random parameter matrices and autocorrelated andcross-correlated noises many research efforts have beendevoted to the centralized fusion estimation problem [15ndash18] Centralized algorithms are based on a fusion centre ableto receive all the measured data from sensors for being pro-cessed they provide optimal estimators from the measure-ments of all the sensors and hence when all the sensors workcorrectly they have the best accuracy Nevertheless as it isknown the centralized approach has several drawbacks suchas bad robustness poor survivability and reliability heavycommunication and expensive computational cost whichcan be overcome by using distributed approaches In the dis-tributed fusionmethod each sensor estimates the state basedon its own measurement data and these local estimators arecombined according to a certain information fusion criterionTo the best of the authorsrsquo knowledge the distributed fusionestimation problem in networked systems with both randomparameter matrices and autocorrelated and cross-correlatednoises has not been investigated
Motivated by the above considerations this paper dealswith the distributed fusion estimation problem in sensor net-work systems including simultaneously random parameter
matrices and correlated noises in the state-space model Themain contributions of our study can be highlighted as follows(1)The network systemmodel with randomparametermatri-ces considered provides a unified framework to treat somenetwork-induced phenomena such as multiplicative noiseuncertainties missing measurements or sensor gain degra-dation and hence the proposed distributed fusion filter haswide applicability (2) One-step autocorrelation of the noisesand also two-step cross-correlation between the processnoise anddifferent sensor noises are considered (3)The inno-vation technique is used to obtain algorithms for the localleast-squares linear filtering estimators which are recursiveand computationally simple (4) The proposed distributedfusion filter is generated by a matrix-weighted linear combi-nation of the local filtering estimators using themean squarederror as optimality criterion requiring the cross-covariancematrices between any two local filters but not the error cross-covariance matrices as in [1]
The rest of the paper is organized as follows The systemmodel withmultiple sensors and random parameter matricesis presented in Section 2 including a brief description ofthe traditional centralized and distributed fusion estimationmethods The local least-squares linear filtering algorithmsare derived in Section 3 using an innovation approach InSection 4 the proposed distributed fusion filter is obtainedby a matrix-weighted linear combination of the local filteringestimators using the mean squared error as optimality cri-terion A simulation example is given in Section 5 to showthe performance of the proposed estimation algorithms andsome conclusions are drawn in Section 6
Notation The notation used throughout the paper is stan-dardR119899 denotes the 119899-dimensional Euclidean space119860119879 and119860minus1 denote the transpose and inverse of a matrix 119860 respec-
tively The shorthand (1198601 119860
119898) denotes a partitioned
matrix into submatrices 1198601 119860
119898 If a matrix dimension
is not explicitly stated it is assumed to be compatiblefor algebraic operations Moreover for any function 119866
119896119904
depending on the time instants 119896 and 119904 we write119866119896= 119866119896119896
forsimplicity Analogously we write119870(119894) = 119870(119894119894) for any function119870(119894119895) depending on sensors 119894 and 119895 120575
119896-119904 represents theKronecker delta function which is equal to one if 119896 = 119904 andzero otherwise Orthogonal Projection Lemma is abbreviatedas OPL Finally all the random vectors will be defined onthe probabilistic space (ΩA 119875) and for arbitrary randomvectors 119883 and 119884 we denote Cov[119883 119884] = 119864[(119883 minus 119864[119883])(119884 minus119864[119884])
119879
] and Cov[119883] = Cov[119883119883] where 119864[sdot] stands for themathematical expectation operator
2 System Formulation and Problem Statement
Consider the following discrete-time linear stochastic systemwith119898 different sensors
119909119896+1
= 119865119896119909119896+ 119908119896 119896 ge 0 (1)
119910(119894)
119896= 119867(119894)
119896119909119896+ V(119894)119896 119896 ge 1 119894 = 1 2 119898 (2)
Discrete Dynamics in Nature and Society 3
where 119909119896isin R119899119909 is the state vector and 119910(119894)
119896isin R119899119910 is the
output measured by sensor 119894 both at time 119896 119865119896 119896 ge 0 and
119867(119894)
119896 119896 ge 1 are sequences of random parameter matrices
with compatible dimensions 119908119896 119896 ge 0 is the process noise
and V(119894)119896 119896 ge 1 is the measurement noise of the 119894th sensor
21 Model Assumptions The assumptions about the initialstate the randomparametermatrices and the noises involvedin the system model (1)-(2) under which the fusion filteringproblem will be addressed are as follows
(i) The initial state 1199090is a random vector with119864[119909
0] = 1199090
and Cov[1199090] = Σ0
(ii) 119865119896 119896 ge 0 and 119867
(119894)
119896 119896 ge 1 are sequences
of independent random parameter matrices withknown means 119864[119865
119896] = 119865
119896 119864[119867(119894)
119896] = 119867
(119894)
119896 119894 =
1 2 119898 and the covariances of their entriesCov[119891
119901119902(119896) 11989111990110158401199021015840(119896)] Cov[ℎ(119894)
119901119886(119896) ℎ(119894)
119902119887(119896)] are also
assumed to be known 119891119901119902(119896) denotes the (119901 119902)th
entry of matrix 119865119896 for 119901 119902 = 1 2 119899
119909 and ℎ(119894)
119901119902(119896)
denotes the (119901 119902)th entry of119867(119894)119896 for 119901 = 1 2 119899
119909
and 119902 = 1 2 119899119910
(iii) The noises 119908119896 119896 ge 0 and V(119894)
119896 119896 ge 1 119894 = 1 2
119898 are zero-mean sequences with known covari-ances and cross-covariances
Cov [119908119896 119908119904] = 119876119896119904(120575119896minus119904+ 120575119896minus119904+1
+ 120575119896minus119904minus1
)
Cov [V(119894)119896 V(119895)119904] = 119877(119894119895)
119896119904(120575119896minus119904+ 120575119896minus119904+1
+ 120575119896minus119904minus1
)
Cov [119908119896 V(119894)119904] = 119878(119894)
119896119904(120575119896minus119904+ 120575119896minus119904+1
+ 120575119896minus119904+2
)
(3)
(iv) For 119894 = 1 2 119898 the initial state 1199090and the
processes 119865119896 119896 ge 0 and 119867(119894)
119896 119896 ge 1 are mutually
independent and they are independent of the additivenoises 119908
119896 119896 ge 0 and V(119894)
119896 119896 ge 1
Remark 1 By denoting 119865119896= 119865119896minus 119865119896 (119894)119896= 119867(119894)
119896minus 119867
(119894)
119896
119894 = 1 2 119898 and 119863 an arbitrary deterministic matrix thefollowing identities hold for (119901 119902)th entries of the matrices119864[119865119896119863119865119879
119896] and 119864[(119894)
119896119863(119894)119879
119896]
(119864 [119865119896119863119865119879
119896])119901119902
=
119899119909
sum
119886=1
119899119909
sum
119887=1
Cov [119891119901119886(119896) 119891
119902119887(119896)]119863
119886119887
119901 119902 = 1 2 119899119909
(119864 [(119894)
119896119863(119894)119879
119896])119901119902
=
119899119909
sum
119886=1
119899119909
sum
119887=1
Cov [ℎ(119894)119901119886(119896) ℎ
(119894)
119902119887(119896)]119863
119886119887
119901 119902 = 1 2 119899119910
(4)
Remark 2 Assumptions (i)ndash(iii) lead to the following recur-sive formula forD
119896equiv 119864[119909
119896119909119879
119896] the correlation matrix of the
state vector 119909119896(see eg [15])
D119896+1
= 119865119896D119896119865
119879
119896+ 119864 [119865
119896D119896119865119879
119896] + 119876119896+ 119865119896119876119896minus1119896
+ 119876119896119896minus1
119865
119879
119896 119896 ge 1
D1= 1198650D0119865
119879
0+ 119864 [119865
0D0119865119879
0] + 1198760
D0= Σ0+ 1199090119909119879
0
(5)
Remark 3 The following correlation properties of the vectornoises 119908
119896and V(119894)119896
are easily inferred from assumptions (iii)-(iv)
(i) For 119894 = 1 2 119898 the noise vector119908119896is uncorrelated
with the observations 119910(119894)1 119910
(119894)
119896minus1and correlated
with 119910(119894)119896 with
W(119894)
119896equiv 119864 [119908
119896119910(119894)119879
119896] = 119876
119896119896minus1119867
(119894)119879
119896+ 119878(119894)
119896 119896 ge 1 (6)
(ii) For 119894 119895 = 1 2 119898 the noise vector V(119894)119896
is uncor-related with the observations 119910(119895)
1 119910
(119895)
119896minus2and corre-
lated with 119910(119895)119896minus1
with
V(119894119895)
119896119896minus1equiv 119864 [V(119894)
119896119910(119895)119879
119896minus1] = 119878(119894)119879
119896minus2119896119867
(119895)119879
119896minus1+ 119877(119894119895)
119896119896minus1 119896 ge 2 (7)
Our aim is to address the optimal least-squares (LS)linear filtering problem of state 119909
119896by fusing effectively the
observations 119910(119894)1 119910
(119894)
119896 119894 = 1 2 119898 specifically we use
the traditional centralized and distributed fusion methodsIn the centralized fusion method all the measurement datacoming from 119898 sensors are used in the fusion center for thestate estimation while in the distributed fusion method theobservations in the fusion center are replaced by the estimatesthat have been locally computed As it is known the maindrawbacks of the first one are the expensive computationalcost and poor robustness and flexibility while the latterovercomes these disadvantages and provides greater accuracythan the local estimators
22 Centralized Fusion Algorithm Combining 119898 measure-ment equations given by (2) and setting 119910
119896= (119910(1)119879
119896
119910(119898)119879
119896)119879 the discrete-time multisensor system with random
parameter matrices and correlated additive noises (1)-(2)considered in this paper is a special case of the discrete-time stochastic system with random parameter matrices andcorrelated additive noises considered in [17] Hence theoptimal centralized fusion filter could be obtained by theoptimal LS linear filtering algorithm in [17]
23 Distributed Fusion Algorithm The distributed fusionmethod computes at each sensor a local optimal LS linearstate filter using its own measurement data and subse-quently the fusion center computes the LS matrix-weighted
4 Discrete Dynamics in Nature and Society
linear combination of the local filtering estimators Hencethe distributed fusion filtering algorithm is performed in twosteps In the first one (Section 3) for each 119894 = 1 2 119898 alocal LS linear estimator of the signal 119909
119896 denoted by 119909(119894)
119896119896 is
produced using themeasurements119910(119894)1 119910
(119894)
119896 by a recursive
algorithm In the second step (Section 4) a fusion distributedestimator 119909(119863)
119896119896 is generated by a matrix-weighted linear
combination of the local estimators 119909(119894)119896119896
119894 = 1 2 119898using the mean squared error as optimality criterion
3 Local LS Linear Filtering Algorithm
This section is concerned with the problem of obtaining arecursive algorithm for the local LS linear filter at each sensor119894 for 119894 = 1 119898 by using an innovation approach
Theorem4 For system (1)-(2) under assumptions (i)ndash(iv) thelocal LS linear filter 119909(119894)
119896119896 is given by
119909(119894)
119896119896= 119909(119894)
119896119896minus1+X(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119909
(119894)
00= 1199090 (8)
where the one-stage state predictor 119909(119894)119896119896minus1
satisfies
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+W(119894)
119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2
119909(119894)
10= 11986501199090
(9)
The filtering error covariance matrix Σ(119894)119896119896
is given by
Σ(119894)
119896119896= Σ(119894)
119896119896minus1minusX(119894)
119896Π(119894)minus1
119896X(119894)119879
119896 119896 ge 1 Σ
(119894)
00= Σ0 (10)
where the prediction error covariance matrix Σ(119894)119896119896minus1
is calcu-lated by
Σ(119894)
119896119896minus1= 119865119896minus1Σ(119894)
119896minus1119896minus1119865
119879
119896minus1+ 119864 [119865
119896minus1D119896minus1119865119879
119896minus1]
+ 119876119896minus1+ 119865119896minus1
J(119894)
119896minus1+J(119894)119879
119896minus1119865
119879
119896minus1
minusW(119894)
119896minus1Π(119894)minus1
119896minus1W(119894)119879
119896minus1 119896 ge 2
Σ(119894)
10= 1198650Σ00119865
119879
0+ 119864 [119865
0D0119865119879
0] + 1198760
(11)
with
J(119894)
119896= 119876119896minus1119896
minusX(119894)
119896Π(119894)minus1
119896W(119894)119879
119896 119896 ge 1 (12)
The matrixX(119894)119896is obtained by
X(119894)
119896= Σ(119894)
119896119896minus1119867
(119894)119879
119896+M(119894)
119896 119896 ge 1 (13)
whereM(119894)119896is given by
M(119894)
119896= 119865119896minus1119878(119894)
119896minus2119896+ 119878(119894)
119896minus1119896minusX(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1
119896 ge 2
M(119894)
1= 119878(119894)
01
(14)
with
X(119894)
119896119896minus1= 119865119896minus1
X(119894)
119896minus1+W(119894)
119896minus1 119896 ge 2 (15)
The innovation 120583(119894)119896 is given by
120583(119894)
119896= 119910(119894)
119896minus 119867
(119894)
119896119909(119894)
119896119896minus1minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2
120583(119894)
1= 119910(119894)
1minus 119867
(119894)
1119909(119894)
10
(16)
and the innovation covariance matrix Π(119894)119896 satisfies
Π(119894)
119896= 119864 [
(119894)
119896D119896(119894)119879
119896] + 119867
(119894)
119896X(119894)
119896+M(119894)119879
119896119867
(119894)119879
119896
+ 119877(119894)
119896minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
Π(119894)
1= 119864 [
(119894)
1D1(119894)119879
1] + 119867
(119894)
1X(119894)
1+M(119894)119879
1119867
(119894)119879
1
+ 119877(119894)
1
(17)
The matrices D119896 W(119894)119896 and V
(119894)
119896119896minus1are given in (5) (6) and
(7) respectively
Proof See Appendix
The computational procedure of the proposed local LSlinear filtering algorithm can be summarized as follows
The matrices W(119894)119896
and V(119894)
119896119896minus1are computed by expres-
sions (6) and (7) respectively We obtain D119896recursively by
(5) where thematrix119864[119865119896minus1
D119896minus1119865119879
119896minus1] necessary to compute
D119896and Σ(119894)
119896119896minus1 is obtained as indicated in Remark 1 The
matrix 119864[(119894)119896D119896(119894)119879
119896] is also computed in order to obtain
the innovation covariance matrix Π(119894)119896 Note that all these
matrices depend only on the system model information andcan be obtained before the observations are available
At the sampling time 119896 once (119896minus1)th iteration is finishedand the new observation 119910(119894)
119896is available starting with the
prior knowledge including X(119894)
119896minus1 120583(119894)119896minus1
Π(119894)119896minus1
119909(119894)119896119896minus1
andΣ(119894)
119896119896minus1 the proposed filtering algorithm operates as follows
Step 1 From (15) X(119894)119896119896minus1
is computed and from it M(119894)119896
isprovided by (14) and thenX
(119894)
119896is obtained by (13)
Step 2 The innovation 120583(119894)119896
and its covariance matrix Π(119894)119896are
computed by (16) and (17) respectively
Step 3 The filter 119909(119894)119896119896
and the filtering error covariancematrix Σ(119894)
119896119896 are computed by (8) and (10) respectively
Step 4 To implement the above steps at time 119896 + 1 we must
(1) compute the state predictor 119909(119894)119896+1119896
by (9)
(2) compute J(119894)
119896by (12) and from this the prediction
error covariance matrix Σ(119894)119896+1119896
by (11)
Discrete Dynamics in Nature and Society 5
4 Distributed Fusion Filtering Estimators
Once the local LS linear filters 119909(119894)119896119896
for each sensor 119894 =1 2 119898 have been obtained our objective in this section isto design a distributed fusion filter119909(119863)
119896119896 by amatrix-weighted
linear combination of such estimators which minimizes themean squared estimation error To simplify the derivationof the proposed fusion estimators we previously presentsome useful lemmas that provide the expectations 119870(119894119895)
119896119896minus1=
119864[119909(119894)
119896119896minus1119909(119895)119879
119896119896minus1] 119871(119894119895)119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] and Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)
119896]
necessary for subsequent calculations The assumptions andnotation in these lemmas are those of Section 3
41 Preliminary Results
Lemma 5 For 119894 119895 = 1 2 119898 the cross-covariancematrix between any two local state predictors 119870(119894119895)
119896119896minus1=
119864[119909(119894)
119896119896minus1119909(119895)119879
119896119896minus1] satisfies
119870(119894119895)
119896119896minus1= 119865119896minus1119870(119894119895)
119896minus1119896minus2119865
119879
119896minus1+ 119865119896minus1119871(119894119895)
119896minus1Π(119895)minus1
119896minus1X(119895)119879
119896119896minus1
+X(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1Π(119895)minus1
119896minus1X(119895)119879
119896119896minus1
+X(119894)
119896119896minus1Π(119894)minus1
119896minus1119871(119895119894)119879
119896minus1119865
119879
119896minus1 119896 ge 2 119894 = 119895
119870(119894119895)
10= 11986501199090119909119879
0119865
119879
0
119870(119894)
119896119896minus1= D119896minus Σ(119894)
119896119896minus1 119896 ge 1
(18)
Proof Using (A7) and the fact that 119871(119894119895)119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] and
Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)
119896] the proof of this lemma is immediately
clear
Lemma 6 For 119894 119895 = 1 2 119898 and 119894 = 119895 the expectation119871(119894119895)
119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] satisfies
119871(119894119895)
119896= (119870(119894)
119896119896minus1minus 119870(119894119895)
119896119896minus1)119867
(119895)119879
119896+X(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1
minus 119871(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1 119896 ge 2
119871(119894119895)
1= 0
(19)
where 119871(119894119895)119896119896minus1
= 119864[119909(119894)
119896119896minus1120583(119895)119879
119896minus1] is given by
119871(119894119895)
119896119896minus1= 119865119896minus1119871(119894119895)
119896minus1+X(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1 119896 ge 2 (20)
Proof Taking into account expression (16) for 120583(119895)119896 we have
that
119871(119894119895)
119896= 119864 [119909
(119894)
119896119896minus1119910(119895)119879
119896] minus 119870(119894119895)
119896119896minus1119867
(119895)119879
119896
minus 119871(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1
(21)
Now using (2) for 119910(119895)119896 (A7) for 119909(119894)
119896119896minus1 and the OPL we
obtain
119864 [119909(119894)
119896119896minus1119910(119895)119879
119896] = 119870
(119894)
119896119896minus1119867
(119895)119879
119896+X(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1 (22)
From the above relations the expression for 119871(119894119895)119896
is immedi-ately derived
Using again (A7) for 119909(119894)119896119896minus1
expression for 119871(119894119895)119896119896minus1
is alsoimmediately clear and the proof is completed
Lemma 7 For 119894 119895 = 1 2 119898 and 119894 = 119895 the innovationcross-covariance matrix Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)119879
119896] satisfies
Π(119894119895)
119896= 119867
(119894)
119896(X(119895)
119896minus 119871(119894119895)
119896) +M
(119895119894)119879
119896119867
(119895)119879
119896+ 119877(119894119895)
119896
minusV(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119895119894)119879
119896119896minus1 119896 ge 2
Π(119894119895)
1= 119867
(119894)
1(X(119895)
1minus 119871(119894119895)
1) +M
(119895119894)119879
1119867
(119895)119879
1+ 119877(119894119895)
1
(23)
whereM(119894119895)119896= 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119895)119879119896] is given by
M(119894119895)
119896= 119865119896minus1119878(119895)
119896minus2119896+ 119878(119895)
119896minus1119896minusX(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1
119896 ge 2
M(119894119895)
1= 119878(119895)
01
(24)
and Π(119894119895)119896119896minus1
= 119864[120583(119894)
119896120583(119895)119879
119896minus1] is obtained by
Π(119894119895)
119896119896minus1= 119867
(119894)
119896(X(119895)
119896119896minus1minus 119871(119894119895)
119896119896minus1) +V
(119894119895)
119896119896minus1
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1 119896 ge 2
(25)
Proof Using (16) for the innovation 120583(119894)119896 it is clear that
Π(119894119895)
119896= 119864 [119910
(119894)
119896120583(119895)119879
119896] minus 119867
(119894)
119896119871(119894119895)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1119864 [120583(119894)
119896minus1120583(119895)119879
119896]
(26)
Similar reasoning to that used to obtain (17) yields
119864 [119910(119894)
119896120583(119895)119879
119896] = 119867
(119894)
119896X(119895)
119896+M(119895119894)119879
119896119867
(119895)119879
119896+ 119877(119894119895)
119896
minusV(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1 119896 ge 2
119864 [119910(119894)
1120583(119895)119879
1] = 119867
(119894)
1X(119894)
1+M(119895119894)119879
1119867
(119895)119879
1+ 119877(119894119895)
1
(27)
So the expression for Π(119894119895)119896
is immediately derived Theexpression forΠ(119894119895)
119896119896minus1is obtained by analogous reasoning
42 Distributed Fusion Filter Design Aswe have already indi-cated our goal is to obtain a distributed fusionfilter119909(119863)
119896119896 gen-
erated by aweighted sumof the local estimatorssum119898119894=1119865(119894)
119896119909(119894)
119896119896
in which the weight matrices 119865(119894)119896 119894 = 1 2 119898 are com-
puted to minimize the mean squared estimation errorSo by denoting 119883
119896119896= (119909(1)119879
119896119896 119909
(119898)119879
119896119896)119879 and F
119896=
(119865(1)
119896 119865
(119898)
119896) the aim is to findF
119896such that the estimator
F119896119883119896119896
minimizes
119864 [(119909119896minusF119896119883119896119896) (119909119896minusF119896119883119896119896)
119879
] (28)
6 Discrete Dynamics in Nature and Society
As it is well known the solution of this problem is given bythe matrix
Fopt119896= 119864 [119909
119896119883119879
119896119896] (119864 [119883
119896119896119883119879
119896119896])
minus1
119896 ge 1 (29)
The following theorem provides the proposed distributedfusion filtering estimators 119909(119863)
119896119896 and their error covariance
matrices Σ(119863)119896119896
Theorem 8 Let 119883119896119896
= (119909(1)119879
119896119896 119909
(119898)119879
119896119896)119879 be the vector
formed by the local LS filtering estimators calculated inTheorem 4 Then the distributed fusion filter is given by
119909(119863)
119896119896= Ξ119896119896119870minus1
119896119896119883119896119896 119896 ge 1 (30)
where
119870119896119896= (119870(119894119895)
119896119896)119894119895=1119898
Ξ119896119896= (119870(1)
119896119896 119870
(119898)
119896119896)
(31)
and 119870(119894119895)119896119896= 119864[119909
(119894)
119896119896119909(119895)119879
119896119896] 119894 119895 = 1 2 119898 are computed by
119870(119894119895)
119896119896= 119870(119894119895)
119896119896minus1+ 119871(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896+X(119894)
119896Π(119894)minus1
119896119871(119895119894)119879
119896
+X(119894)
119896Π(119894)minus1
119896Π(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896
119896 ge 1 119894 = 119895
119870(119894)
119896119896= D119896minus Σ(119894)
119896119896 119896 ge 1
(32)
with 119870(119894119895)119896119896minus1
119871(119894119895)119896 and Π(119894119895)
119896given in Lemmas 5 6 and 7
respectivelyThe error covariance matrices of the distributed fusion
filtering estimators are computed by
Σ(119863)
119896119896= D119896minus Ξ119896119896119870minus1
119896119896Ξ119879
119896119896 119896 ge 1 (33)
Proof Expressions (30) and (33) for the distributed estima-tors and their error covariance matrices respectively areimmediately derived from (29) Expression (32) for the cross-covariancematrices between local filtering estimators followseasily using expression (8) of such estimators
5 Numerical Simulation Example
Consider the following discrete-time linear networked sys-tem with state-dependent multiplicative noise and scalarmeasurements from four sensors
119909119896= (095 + 02120598
119896minus1) 119909119896minus1+ 119908119896minus1 119896 ge 1
119910(119894)
119896= 119867(119894)
119896119909119896+ V(119894)119896 119896 ge 1 119894 = 1 2 3 4
(34)
where 120598119896 119896 ge 0 is a zero-meanGaussianwhite process with
unit varianceThe additive noises are defined as119908119896= 06(120578
119896+
120578119896+1) and V(119894)
119896= 119888(119894)
119896(120578119896minus1
+ 120578119896) 119894 = 1 2 3 4 where 119888(1)
119896= 1
119888(2)
119896= 05 119888(3)
119896= 075 and 119888(4)
119896= 085 and 120578
119896 119896 ge 0 is a
zero-mean Gaussian white process with variance 05
For 119894 = 1 2 3 4 the random parameter matrices119867(119894)119896
aredefined as follows
(i) 119867(1)119896
= 082120582(1)
119896 where 120582(1)
119896 119896 ge 1 is a sequence
of independent and identically distributed (iid) ran-dom variables uniformly distributed over [03 07]
(ii) 119867(2)119896= 075120582
(2)
119896 where 120582(2)
119896 119896 ge 1 is a sequence of
iid discrete randomvariables with119875[120582(2)119896= 0] = 01
119875[120582(2)
119896= 05] = 05 and 119875[120582(2)
119896= 1] = 04
(iii) 119867(3)119896
= 074120582(3)
119896 where 120582(3)
119896 119896 ge 1 is a Bernoulli
process with 119875[120582(3)119896= 1] = 119901
(3) forall119896
(iv) 119867(4)119896= 120582(4)
119896(075 + 095120585
119896) where 120582(4)
119896 119896 ge 1 is a
Bernoulli process with 119875[120582(4)119896= 1] = 119901
(4) forall119896 and120585119896 119896 ge 0 is a zero-mean Gaussian white process
with unit varianceNote that the random parameter matrices at each sensor
119867(119894)
119896 allow modeling different types of uncertainty Namely
in sensors 1 and 2 as in [13] the scalar random variables 120582(119894)119896
take values over the interval [0 1] and represent continuousand discrete stochastic sensor gain degradation respectivelyIn sensor 3120582(3)
119896are Bernoulli randomvariables thus covering
the phenomenon of missing measurements with 120582(3)119896= 1
meaning that the signal 119909119896is present in the measurement 119910(3)
119896
coming from the third sensor at time 119896 while 120582(119894)119896= 0means
that the signal is missing in the measured data at time 119896 orequivalently that such observation is only noise V(3)
119896 Finally
as in [5] bothmissingmeasurements andmultiplicative noiseare considered in sensor 4
To illustrate the feasibility and effectiveness of the pro-posed algorithms they were implemented in MATLAB andone hundred iterations of the algorithms were run Usingsimulated values both centralized and distributed filteringestimates were calculated as well as the corresponding errorvariances in order to measure the estimation accuracy
The error variances of the local centralized and dis-tributed fusion filters are compared considering fixed values119901(3)
= 05 119901(4) = 075 In Figure 1 we can see that theerror variances of the distributed fusion filter are significantlysmaller than those of every local filter but lightly greaterthan those of the centralized filter Nevertheless althoughthe centralized fusion filter outperforms the distributed onethis difference is slight and both filters perform similarly andprovide good estimations Besides this slight difference iscompensated by the fact that the distributed fusion structurereduces the computational cost and has the advantage ofbetter robustness and fault tolerance For example assumingthat the fourth sensor is faulty and themeasurement equationis given by 119910(4)
119896= 119867(4)
119896119909119896+ V(4)119896+ 119886119896 where 119886
119896= 05119896 for
50 le 119896 le 70 and 119886119896= 0 otherwise Figure 2 displays the
corresponding filtering mean square errors of one thousandindependent simulations at each sampling time 119896 showingthat the distributed fusion method has better fault-toleranceabilities than the centralized one
Next we analyze the centralized and distributed filteringaccuracy in function of the probabilities 119901(3) and 119901(4) of
Discrete Dynamics in Nature and Society 7
Centralized filtering error variancesDistributed filtering error variancesLocal filtering error variances (sensor 1)Local filtering error variances (sensor 2)Local filtering error variances (sensor 3)Local filtering error variances (sensor 4)
10 20 30 40 50 60 70 80 90 1000Iteration k
0
05
1
15
2
25
3
35
Filte
ring
erro
r var
ianc
es
Figure 1 Error variance comparison of the centralized distributedand local filtering estimators
MSE centralized filterMSE distributed filter
10 20 30 40 50 60 70 80 90 1000Iteration k
0
1
2
3
4
5
6
7
8
Mea
n sq
uare
erro
rs
Figure 2 Centralized and distributed filtering mean square errors
the Bernoulli variables that model uncertainties of the obser-vations coming from sensors 3 and 4 respectively Specifi-cally the filter performances are analyzed when 119901(3) is variedfrom 01 to 09 and different values of 119901(4) are consideredSince the behavior of the error variances is analogous in allthe iterations only the results of a specific iteration (119896 = 100)
Distributed error variances
Centralized error variances
05
055
06
065
07
075
08
Filte
ring
erro
r var
ianc
es
p(4) = 03
p(4) = 05
p(4) = 07
p(4) = 09
050302 0604 0807 0901Probability p(3)
Figure 3 Centralized and distributed filtering error variances at 119896 =100 versus 119901(3) when 119901(4) = 03 05 07 and 09
are shown here In Figure 3 the centralized and distributedfiltering error variances are displayed versus 119901(3) for 119901(4) =03 05 07 and 09 As expected from this figure it isconcluded that as 119901(3) or 119901(4) increase the centralized anddistributed error variances both become smaller and hencethe performance of the centralized and distributed filtersimproves as these probabilities increase
Finally to evaluate the performance of the proposed fil-ters in comparisonwith other filters reported in the literaturethe filtering mean square error (MSE) at each sampling time119896 is calculated To compute the MSE one thousand indepen-dent simulations were considered and one hundred iterationsof each algorithm were performed considering the values119901(3)
= 05119901(4) = 075 A comparative analysis was carried outbetween the proposed centralized and distributed filters andthe following filters
(i) The centralized Kalman filter for systems with inde-pendent additive noises
(ii) The centralized filter for multisensor systems withmultiplicative noises in the state and observationequations missing measurements and noise correla-tion at the same sampling time [5]
(iii) The centralized filter for networked systems withmultiplicative noise in the state equation stochasticsensor gain degradation and independent additivenoises [13]
The results of these comparisons are displayed in Figure 4which shows that the proposed centralized and distributedfilters perform better than the other three centralized filtersTheKalmanfilter provides theworst estimations since neithermultiplicative noises nor missing measurements are taken
8 Discrete Dynamics in Nature and Society
Centralized Kalman filter Filter in [13]Filter in [5]Proposed centralized filter
Proposed distributed filter
0
05
1
15
2
25
3
35
4
45
Mea
n sq
uare
erro
rs
10 20 30 40 50 60 70 80 90 1000Iteration k
Figure 4 Mean square errors when 119901(3) = 05 119901(4) = 075
into accountThe performance of the filter in [5] is better thanthat of the filter in [13] since the latter ignores any correlationassumption and multiplicative observation noise in sensor 4is not taken into account
6 Conclusion
Thedistributed fusion filtering problemhas been investigatedfor multisensor stochastic systems with random parametermatrices and correlated noises The main outcomes andresults can be summarized as follows
(i) Recursive algorithms for the local LS linear filters ofthe system state based on the measured output datacoming from each sensor have been designed by aninnovation approach The computational procedureof these local filtering algorithms is very simple andsuitable for online applications
(ii) Once the local filters have been obtained a distributedfusion filter has been designed as thematrix-weightedsum of such local estimators which minimizes themean squared estimation error The error covariancematrices of such distributed fusion filter have beenalso derived
(iii) A numerical simulation example has illustrated theusefulness of the proposed results Error variancecomparison has shown that both the centralized andthe distributed filters outperform the local ones thisexample has also shown that the slight superiorityof the centralized filter over the distributed filter iscompensated by better robustness and fault-toleranceabilities of the latter This example has also high-lighted the applicability of the proposed algorithmfor a great variety of multisensor systems featuring
network-induced stochastic uncertainties such assensor gain degradation missing measurements ormultiplicative observation noises which can be dealtwith in the observation model considered in thispaper
A challenging further research topic is to address the esti-mation problem for this kind of system with random param-eter matrices considering a sensor network whose nodes aredistributed according to a given topology characterized by adirected graph Also an interesting future research topic is toconsider other kinds of stochastic uncertainties which oftenappear in networked systems such as random delays andpacket dropouts
Appendix
Proof of Theorem 4
This appendix provides the proof of Theorem 4 by aninnovation approach For the 119894th sensor the innovation attime 119896 is defined as 120583(119894)
119896= 119910(119894)
119896minus 119910(119894)
119896119896minus1 where 119910(119894)
119896119896minus1is
the LS linear estimator of 119910(119894)119896
based on measurements 119910(119894)119904
119904 le 119896minus1 Replacing the observation process by the innovationone the LS linear estimator (119894)
119896119871 of a random vector 119911
119896based
on the observations 119910(119894)1 119910
(119894)
119871 can be calculated as linear
combination of the innovations 120583(119894)1 120583
(119894)
119871 namely
(119894)
119896119871=
119871
sum
119904=1
119864 [119911119896120583(119894)119879
119904] (119864 [120583
(119894)
119904120583(119894)119879
119904])
minus1
120583(119894)
119904 119896 ge 1 (A1)
From system equations (1)-(2) and the OPL the statepredictor 119909(119894)
119896119896minus1 and the observation predictor 119910(119894)
119896119896minus1 verify
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+ 119908(119894)
119896minus1119896minus1 119896 ge 1 (A2)
119910(119894)
119896119896minus1= 119867
(119894)
119896119909(119894)
119896119896minus1+ V(119894)119896119896minus1
119896 ge 1 (A3)
Because of the correlation assumption (iii) the noise filter119908(119894)
119896119896and the one-stage noise predictor V(119894)
119896119896minus1are not equal
to zero and hence expressions for such estimators must becalculated
LS Linear Noise Estimators 119908(119894)119896119896
and V(119894)119896119896minus1
From the generalexpression for estimators (A1) taking into account the factthat by Remark 3
119864 [119908119896120583(119894)119879
119896] = 119864 [119908
119896119910(119894)119879
119896] =W
(119894)
119896
119864 [V(119894)119896120583(119894)119879
119896minus1] = 119864 [V(119894)
119896119910(119894)119879
119896minus1] =V
(119894)
119896119896minus1
(A4)
we have that the noise filter 119908(119894)119896119896
and the one-stage noisepredictor V(119894)
119896119896minus1 satisfy
119908(119894)
119896119896=W(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119908
(119894)
00= 0 (A5)
V(119894)119896119896minus1
=V(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 V(119894)
10= 0 (A6)
Discrete Dynamics in Nature and Society 9
Now we will prove the local filtering algorithm by severalsteps
(I) Derivation of the Filter (8) One-Stage State Predictor (9)andTheir Error CovarianceMatrices (10) and (11) RespectivelyFrom (A1) by denoting X
(119894)
119896= 119864[119909
119896120583(119894)119879
119896] and Π(119894)
119896=
119864[120583(119894)
119896120583(119894)119879
119896] expression (8) for the filter is obvious and from
this relation and theOPL we obtain (10) for the filtering errorcovariance
From (A2) and (A5) expression (9) withW(119894)119896satisfying
(6) for the state predictor is immediately obtained Thisexpression together with state equation (1) leads to (11) for theprediction error covariance matrix whereD
119896is given by (5)
andJ(119894)
119896= 119864[(119909
119896minus 119909(119894)
119896119896)119908119879
119896] clearly satisfies (12)
(II) Derivation of (13) for the Matrix X(119894)119896= 119864[119909
119896120583(119894)119879
119896] From
(8) and (9) the following recursive expression for the statepredictor is obtained
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus2+X(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 (A7)
where from (1) thematrixX(119894)119896119896minus1
= 119864[119909119896120583(119894)119879
119896minus1] clearly verifies
(15)Using relation (A7) and again (1) we obtain that the
correlation between the prediction error and the noiseM(119894)
119896equiv 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119894)119879119896] satisfies (14) This correlation
property allows us to obtain easily expression (13) for thematrixX(119894)
119896= 119864[119909
119896120583(119894)119879
119896] Indeed by the OPL we haveX(119894)
119896=
119864[(119909119896minus119909(119894)
119896119896minus1)119910(119894)119879
119896] and from (2) expression (13) forX(119894)
119896is
obtained
(III) Derivation of Innovation (16) and Its Covariance Matrix(17) From (A3) and (A6) it is clear that the innovation isgiven by (16) withV(119894)
119896119896minus1satisfying (7) Next expression (17)
for Π(119894)119896= 119864[120583
(119894)
119896120583(119894)119879
119896] is derived From the OPL and (2) we
have that
Π(119894)
119896= 119864 [119910
(119894)
119896120583(119894)119879
119896]
= 119867
(119894)
119896119864 [119909119896120583(119894)119879
119896] + 119864 [
(119894)
119896119909119896120583(119894)119879
119896]
+ 119864 [V(119894)119896120583(119894)119879
119896]
(A8)
(i) Again from the OPL and (2) and the conditionalexpectation properties
119864 [(119894)
119896119909119896120583(119894)119879
119896] = 119864 [
(119894)
119896119909119896119909119879
119896(119894)119879
119896]
= 119864 [(119894)
119896D119896(119894)119879
119896] 119896 ge 1
(A9)
(ii) Using (16) for 120583(119894)119896 with (2) for 119910(119894)
119896 we obtain that
119864 [V(119894)119896120583(119894)119879
119896] =M
(119894)119879
119896119867
(119894)119879
119896+ 119877(119894)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
119864 [V(119894)1120583(119894)119879
1] =M
(119894)119879
1119867
(119894)119879
1+ 119877(119894)
1
(A10)
Substituting the above expectations into (A8) we easilyobtain (17) and the proof is completed
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This research is supported by Ministerio de Economıa yCompetitividad (Grant no MTM2014-52291-P and FPU pro-gramme)
References
[1] S-L Sun ldquoMulti-sensor optimal information fusion Kalmanfilters with applicationsrdquo Aerospace Science and Technology vol8 no 1 pp 57ndash62 2004
[2] X Sun and G Yan ldquoDistributed state fusion Kalman predictorbased onWLS algorithmrdquoProcedia Engineering vol 29 pp 216ndash222 2012
[3] C Ran andZDeng ldquoSelf-tuningweightedmeasurement fusionKalman filtering algorithmrdquo Computational Statistics amp DataAnalysis vol 56 no 6 pp 2112ndash2128 2012
[4] Y Song G Wei and G Yang ldquoDistributed 119867infin
filtering for aclass of sensor networks with uncertain rates of packet lossesrdquoSignal Processing vol 104 pp 143ndash151 2014
[5] J Ma and S Sun ldquoCentralized fusion estimators for multi-sensor systems withmultiplicative noises andmissingmeasure-mentsrdquo Journal of Networks vol 7 no 10 pp 1538ndash1545 2012
[6] L Li and Y Xia ldquoUnscented kalman filter over unreliable com-munication networks with markovian packet dropoutsrdquo IEEETransactions on Automatic Control vol 58 no 12 pp 3224ndash3230 2013
[7] X He Z Wang X Wang and D H Zhou ldquoNetworked strongtracking filteringwithmultiple packet dropouts algorithms andapplicationsrdquo IEEE Transactions on Industrial Electronics vol61 no 3 pp 1454ndash1463 2014
[8] S Wang H Fang and X Tian ldquoRecursive estimation for non-linear stochastic systems with multi-step transmission delaysmultiple packet dropouts and correlated noisesrdquo Signal Process-ing vol 115 pp 164ndash175 2015
[9] D Chen Y Yu L Xu and X Liu ldquoKalman filtering for discretestochastic systems with multiplicative noises and random two-step sensor delaysrdquoDiscreteDynamics inNature and Society vol2015 Article ID 809734 11 pages 2015
[10] X Shen Y Luo Y Zhu and E Song ldquoGlobally optimaldistributed Kalman filtering fusionrdquo Science China InformationSciences vol 55 no 3 pp 512ndash529 2012
[11] J Feng Z Wang and M Zeng ldquoDistributed weighted robustKalman filter fusion for uncertain systems with autocorrelatedand cross-correlated noisesrdquo Information Fusion vol 14 no 1pp 78ndash86 2013
[12] C Sanchez-Gonzalez and T M Garcıa-Munoz ldquoRecursivelinear estimation for discrete-time systems in the presence ofdifferent multiplicative observation noisesrdquo Discrete Dynamicsin Nature and Society vol 2010 Article ID 875023 12 pages2010
[13] Y Liu X He Z Wang and D Zhou ldquoOptimal filtering fornetworked systems with stochastic sensor gain degradationrdquoAutomatica vol 50 no 5 pp 1521ndash1525 2014
10 Discrete Dynamics in Nature and Society
[14] Y Luo Y Zhu D Luo J Zhou E Song and DWang ldquoGloballyoptimal multisensor distributed random parameter matricesKalman filtering fusion with applicationsrdquo Sensors vol 8 no12 pp 8086ndash8103 2008
[15] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[16] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoCovariance-based estimation from multisensor delayed mea-surements with random parameter matrices and correlatednoisesrdquoMathematical Problems in Engineering vol 2014 ArticleID 958474 13 pages 2014
[17] J Linares-Perez R Caballero-Aguila and I Garcıa-GarridoldquoOptimal linear filter design for systems with correlation inthe measurement matrices and noises recursive algorithm andapplicationsrdquo International Journal of Systems Science vol 45no 7 pp 1548ndash1562 2014
[18] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoOptimal state estimation for networked systems with randomparameter matrices correlated noises and delayed measure-mentsrdquo International Journal of General Systems vol 44 no 2pp 142ndash154 2015
[19] J Feng and M Zeng ldquoOptimal distributed Kalman filteringfusion for a linear dynamic systemwith cross-correlated noisesrdquoInternational Journal of Systems Science vol 43 no 2 pp 385ndash398 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 3
where 119909119896isin R119899119909 is the state vector and 119910(119894)
119896isin R119899119910 is the
output measured by sensor 119894 both at time 119896 119865119896 119896 ge 0 and
119867(119894)
119896 119896 ge 1 are sequences of random parameter matrices
with compatible dimensions 119908119896 119896 ge 0 is the process noise
and V(119894)119896 119896 ge 1 is the measurement noise of the 119894th sensor
21 Model Assumptions The assumptions about the initialstate the randomparametermatrices and the noises involvedin the system model (1)-(2) under which the fusion filteringproblem will be addressed are as follows
(i) The initial state 1199090is a random vector with119864[119909
0] = 1199090
and Cov[1199090] = Σ0
(ii) 119865119896 119896 ge 0 and 119867
(119894)
119896 119896 ge 1 are sequences
of independent random parameter matrices withknown means 119864[119865
119896] = 119865
119896 119864[119867(119894)
119896] = 119867
(119894)
119896 119894 =
1 2 119898 and the covariances of their entriesCov[119891
119901119902(119896) 11989111990110158401199021015840(119896)] Cov[ℎ(119894)
119901119886(119896) ℎ(119894)
119902119887(119896)] are also
assumed to be known 119891119901119902(119896) denotes the (119901 119902)th
entry of matrix 119865119896 for 119901 119902 = 1 2 119899
119909 and ℎ(119894)
119901119902(119896)
denotes the (119901 119902)th entry of119867(119894)119896 for 119901 = 1 2 119899
119909
and 119902 = 1 2 119899119910
(iii) The noises 119908119896 119896 ge 0 and V(119894)
119896 119896 ge 1 119894 = 1 2
119898 are zero-mean sequences with known covari-ances and cross-covariances
Cov [119908119896 119908119904] = 119876119896119904(120575119896minus119904+ 120575119896minus119904+1
+ 120575119896minus119904minus1
)
Cov [V(119894)119896 V(119895)119904] = 119877(119894119895)
119896119904(120575119896minus119904+ 120575119896minus119904+1
+ 120575119896minus119904minus1
)
Cov [119908119896 V(119894)119904] = 119878(119894)
119896119904(120575119896minus119904+ 120575119896minus119904+1
+ 120575119896minus119904+2
)
(3)
(iv) For 119894 = 1 2 119898 the initial state 1199090and the
processes 119865119896 119896 ge 0 and 119867(119894)
119896 119896 ge 1 are mutually
independent and they are independent of the additivenoises 119908
119896 119896 ge 0 and V(119894)
119896 119896 ge 1
Remark 1 By denoting 119865119896= 119865119896minus 119865119896 (119894)119896= 119867(119894)
119896minus 119867
(119894)
119896
119894 = 1 2 119898 and 119863 an arbitrary deterministic matrix thefollowing identities hold for (119901 119902)th entries of the matrices119864[119865119896119863119865119879
119896] and 119864[(119894)
119896119863(119894)119879
119896]
(119864 [119865119896119863119865119879
119896])119901119902
=
119899119909
sum
119886=1
119899119909
sum
119887=1
Cov [119891119901119886(119896) 119891
119902119887(119896)]119863
119886119887
119901 119902 = 1 2 119899119909
(119864 [(119894)
119896119863(119894)119879
119896])119901119902
=
119899119909
sum
119886=1
119899119909
sum
119887=1
Cov [ℎ(119894)119901119886(119896) ℎ
(119894)
119902119887(119896)]119863
119886119887
119901 119902 = 1 2 119899119910
(4)
Remark 2 Assumptions (i)ndash(iii) lead to the following recur-sive formula forD
119896equiv 119864[119909
119896119909119879
119896] the correlation matrix of the
state vector 119909119896(see eg [15])
D119896+1
= 119865119896D119896119865
119879
119896+ 119864 [119865
119896D119896119865119879
119896] + 119876119896+ 119865119896119876119896minus1119896
+ 119876119896119896minus1
119865
119879
119896 119896 ge 1
D1= 1198650D0119865
119879
0+ 119864 [119865
0D0119865119879
0] + 1198760
D0= Σ0+ 1199090119909119879
0
(5)
Remark 3 The following correlation properties of the vectornoises 119908
119896and V(119894)119896
are easily inferred from assumptions (iii)-(iv)
(i) For 119894 = 1 2 119898 the noise vector119908119896is uncorrelated
with the observations 119910(119894)1 119910
(119894)
119896minus1and correlated
with 119910(119894)119896 with
W(119894)
119896equiv 119864 [119908
119896119910(119894)119879
119896] = 119876
119896119896minus1119867
(119894)119879
119896+ 119878(119894)
119896 119896 ge 1 (6)
(ii) For 119894 119895 = 1 2 119898 the noise vector V(119894)119896
is uncor-related with the observations 119910(119895)
1 119910
(119895)
119896minus2and corre-
lated with 119910(119895)119896minus1
with
V(119894119895)
119896119896minus1equiv 119864 [V(119894)
119896119910(119895)119879
119896minus1] = 119878(119894)119879
119896minus2119896119867
(119895)119879
119896minus1+ 119877(119894119895)
119896119896minus1 119896 ge 2 (7)
Our aim is to address the optimal least-squares (LS)linear filtering problem of state 119909
119896by fusing effectively the
observations 119910(119894)1 119910
(119894)
119896 119894 = 1 2 119898 specifically we use
the traditional centralized and distributed fusion methodsIn the centralized fusion method all the measurement datacoming from 119898 sensors are used in the fusion center for thestate estimation while in the distributed fusion method theobservations in the fusion center are replaced by the estimatesthat have been locally computed As it is known the maindrawbacks of the first one are the expensive computationalcost and poor robustness and flexibility while the latterovercomes these disadvantages and provides greater accuracythan the local estimators
22 Centralized Fusion Algorithm Combining 119898 measure-ment equations given by (2) and setting 119910
119896= (119910(1)119879
119896
119910(119898)119879
119896)119879 the discrete-time multisensor system with random
parameter matrices and correlated additive noises (1)-(2)considered in this paper is a special case of the discrete-time stochastic system with random parameter matrices andcorrelated additive noises considered in [17] Hence theoptimal centralized fusion filter could be obtained by theoptimal LS linear filtering algorithm in [17]
23 Distributed Fusion Algorithm The distributed fusionmethod computes at each sensor a local optimal LS linearstate filter using its own measurement data and subse-quently the fusion center computes the LS matrix-weighted
4 Discrete Dynamics in Nature and Society
linear combination of the local filtering estimators Hencethe distributed fusion filtering algorithm is performed in twosteps In the first one (Section 3) for each 119894 = 1 2 119898 alocal LS linear estimator of the signal 119909
119896 denoted by 119909(119894)
119896119896 is
produced using themeasurements119910(119894)1 119910
(119894)
119896 by a recursive
algorithm In the second step (Section 4) a fusion distributedestimator 119909(119863)
119896119896 is generated by a matrix-weighted linear
combination of the local estimators 119909(119894)119896119896
119894 = 1 2 119898using the mean squared error as optimality criterion
3 Local LS Linear Filtering Algorithm
This section is concerned with the problem of obtaining arecursive algorithm for the local LS linear filter at each sensor119894 for 119894 = 1 119898 by using an innovation approach
Theorem4 For system (1)-(2) under assumptions (i)ndash(iv) thelocal LS linear filter 119909(119894)
119896119896 is given by
119909(119894)
119896119896= 119909(119894)
119896119896minus1+X(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119909
(119894)
00= 1199090 (8)
where the one-stage state predictor 119909(119894)119896119896minus1
satisfies
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+W(119894)
119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2
119909(119894)
10= 11986501199090
(9)
The filtering error covariance matrix Σ(119894)119896119896
is given by
Σ(119894)
119896119896= Σ(119894)
119896119896minus1minusX(119894)
119896Π(119894)minus1
119896X(119894)119879
119896 119896 ge 1 Σ
(119894)
00= Σ0 (10)
where the prediction error covariance matrix Σ(119894)119896119896minus1
is calcu-lated by
Σ(119894)
119896119896minus1= 119865119896minus1Σ(119894)
119896minus1119896minus1119865
119879
119896minus1+ 119864 [119865
119896minus1D119896minus1119865119879
119896minus1]
+ 119876119896minus1+ 119865119896minus1
J(119894)
119896minus1+J(119894)119879
119896minus1119865
119879
119896minus1
minusW(119894)
119896minus1Π(119894)minus1
119896minus1W(119894)119879
119896minus1 119896 ge 2
Σ(119894)
10= 1198650Σ00119865
119879
0+ 119864 [119865
0D0119865119879
0] + 1198760
(11)
with
J(119894)
119896= 119876119896minus1119896
minusX(119894)
119896Π(119894)minus1
119896W(119894)119879
119896 119896 ge 1 (12)
The matrixX(119894)119896is obtained by
X(119894)
119896= Σ(119894)
119896119896minus1119867
(119894)119879
119896+M(119894)
119896 119896 ge 1 (13)
whereM(119894)119896is given by
M(119894)
119896= 119865119896minus1119878(119894)
119896minus2119896+ 119878(119894)
119896minus1119896minusX(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1
119896 ge 2
M(119894)
1= 119878(119894)
01
(14)
with
X(119894)
119896119896minus1= 119865119896minus1
X(119894)
119896minus1+W(119894)
119896minus1 119896 ge 2 (15)
The innovation 120583(119894)119896 is given by
120583(119894)
119896= 119910(119894)
119896minus 119867
(119894)
119896119909(119894)
119896119896minus1minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2
120583(119894)
1= 119910(119894)
1minus 119867
(119894)
1119909(119894)
10
(16)
and the innovation covariance matrix Π(119894)119896 satisfies
Π(119894)
119896= 119864 [
(119894)
119896D119896(119894)119879
119896] + 119867
(119894)
119896X(119894)
119896+M(119894)119879
119896119867
(119894)119879
119896
+ 119877(119894)
119896minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
Π(119894)
1= 119864 [
(119894)
1D1(119894)119879
1] + 119867
(119894)
1X(119894)
1+M(119894)119879
1119867
(119894)119879
1
+ 119877(119894)
1
(17)
The matrices D119896 W(119894)119896 and V
(119894)
119896119896minus1are given in (5) (6) and
(7) respectively
Proof See Appendix
The computational procedure of the proposed local LSlinear filtering algorithm can be summarized as follows
The matrices W(119894)119896
and V(119894)
119896119896minus1are computed by expres-
sions (6) and (7) respectively We obtain D119896recursively by
(5) where thematrix119864[119865119896minus1
D119896minus1119865119879
119896minus1] necessary to compute
D119896and Σ(119894)
119896119896minus1 is obtained as indicated in Remark 1 The
matrix 119864[(119894)119896D119896(119894)119879
119896] is also computed in order to obtain
the innovation covariance matrix Π(119894)119896 Note that all these
matrices depend only on the system model information andcan be obtained before the observations are available
At the sampling time 119896 once (119896minus1)th iteration is finishedand the new observation 119910(119894)
119896is available starting with the
prior knowledge including X(119894)
119896minus1 120583(119894)119896minus1
Π(119894)119896minus1
119909(119894)119896119896minus1
andΣ(119894)
119896119896minus1 the proposed filtering algorithm operates as follows
Step 1 From (15) X(119894)119896119896minus1
is computed and from it M(119894)119896
isprovided by (14) and thenX
(119894)
119896is obtained by (13)
Step 2 The innovation 120583(119894)119896
and its covariance matrix Π(119894)119896are
computed by (16) and (17) respectively
Step 3 The filter 119909(119894)119896119896
and the filtering error covariancematrix Σ(119894)
119896119896 are computed by (8) and (10) respectively
Step 4 To implement the above steps at time 119896 + 1 we must
(1) compute the state predictor 119909(119894)119896+1119896
by (9)
(2) compute J(119894)
119896by (12) and from this the prediction
error covariance matrix Σ(119894)119896+1119896
by (11)
Discrete Dynamics in Nature and Society 5
4 Distributed Fusion Filtering Estimators
Once the local LS linear filters 119909(119894)119896119896
for each sensor 119894 =1 2 119898 have been obtained our objective in this section isto design a distributed fusion filter119909(119863)
119896119896 by amatrix-weighted
linear combination of such estimators which minimizes themean squared estimation error To simplify the derivationof the proposed fusion estimators we previously presentsome useful lemmas that provide the expectations 119870(119894119895)
119896119896minus1=
119864[119909(119894)
119896119896minus1119909(119895)119879
119896119896minus1] 119871(119894119895)119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] and Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)
119896]
necessary for subsequent calculations The assumptions andnotation in these lemmas are those of Section 3
41 Preliminary Results
Lemma 5 For 119894 119895 = 1 2 119898 the cross-covariancematrix between any two local state predictors 119870(119894119895)
119896119896minus1=
119864[119909(119894)
119896119896minus1119909(119895)119879
119896119896minus1] satisfies
119870(119894119895)
119896119896minus1= 119865119896minus1119870(119894119895)
119896minus1119896minus2119865
119879
119896minus1+ 119865119896minus1119871(119894119895)
119896minus1Π(119895)minus1
119896minus1X(119895)119879
119896119896minus1
+X(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1Π(119895)minus1
119896minus1X(119895)119879
119896119896minus1
+X(119894)
119896119896minus1Π(119894)minus1
119896minus1119871(119895119894)119879
119896minus1119865
119879
119896minus1 119896 ge 2 119894 = 119895
119870(119894119895)
10= 11986501199090119909119879
0119865
119879
0
119870(119894)
119896119896minus1= D119896minus Σ(119894)
119896119896minus1 119896 ge 1
(18)
Proof Using (A7) and the fact that 119871(119894119895)119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] and
Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)
119896] the proof of this lemma is immediately
clear
Lemma 6 For 119894 119895 = 1 2 119898 and 119894 = 119895 the expectation119871(119894119895)
119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] satisfies
119871(119894119895)
119896= (119870(119894)
119896119896minus1minus 119870(119894119895)
119896119896minus1)119867
(119895)119879
119896+X(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1
minus 119871(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1 119896 ge 2
119871(119894119895)
1= 0
(19)
where 119871(119894119895)119896119896minus1
= 119864[119909(119894)
119896119896minus1120583(119895)119879
119896minus1] is given by
119871(119894119895)
119896119896minus1= 119865119896minus1119871(119894119895)
119896minus1+X(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1 119896 ge 2 (20)
Proof Taking into account expression (16) for 120583(119895)119896 we have
that
119871(119894119895)
119896= 119864 [119909
(119894)
119896119896minus1119910(119895)119879
119896] minus 119870(119894119895)
119896119896minus1119867
(119895)119879
119896
minus 119871(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1
(21)
Now using (2) for 119910(119895)119896 (A7) for 119909(119894)
119896119896minus1 and the OPL we
obtain
119864 [119909(119894)
119896119896minus1119910(119895)119879
119896] = 119870
(119894)
119896119896minus1119867
(119895)119879
119896+X(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1 (22)
From the above relations the expression for 119871(119894119895)119896
is immedi-ately derived
Using again (A7) for 119909(119894)119896119896minus1
expression for 119871(119894119895)119896119896minus1
is alsoimmediately clear and the proof is completed
Lemma 7 For 119894 119895 = 1 2 119898 and 119894 = 119895 the innovationcross-covariance matrix Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)119879
119896] satisfies
Π(119894119895)
119896= 119867
(119894)
119896(X(119895)
119896minus 119871(119894119895)
119896) +M
(119895119894)119879
119896119867
(119895)119879
119896+ 119877(119894119895)
119896
minusV(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119895119894)119879
119896119896minus1 119896 ge 2
Π(119894119895)
1= 119867
(119894)
1(X(119895)
1minus 119871(119894119895)
1) +M
(119895119894)119879
1119867
(119895)119879
1+ 119877(119894119895)
1
(23)
whereM(119894119895)119896= 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119895)119879119896] is given by
M(119894119895)
119896= 119865119896minus1119878(119895)
119896minus2119896+ 119878(119895)
119896minus1119896minusX(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1
119896 ge 2
M(119894119895)
1= 119878(119895)
01
(24)
and Π(119894119895)119896119896minus1
= 119864[120583(119894)
119896120583(119895)119879
119896minus1] is obtained by
Π(119894119895)
119896119896minus1= 119867
(119894)
119896(X(119895)
119896119896minus1minus 119871(119894119895)
119896119896minus1) +V
(119894119895)
119896119896minus1
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1 119896 ge 2
(25)
Proof Using (16) for the innovation 120583(119894)119896 it is clear that
Π(119894119895)
119896= 119864 [119910
(119894)
119896120583(119895)119879
119896] minus 119867
(119894)
119896119871(119894119895)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1119864 [120583(119894)
119896minus1120583(119895)119879
119896]
(26)
Similar reasoning to that used to obtain (17) yields
119864 [119910(119894)
119896120583(119895)119879
119896] = 119867
(119894)
119896X(119895)
119896+M(119895119894)119879
119896119867
(119895)119879
119896+ 119877(119894119895)
119896
minusV(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1 119896 ge 2
119864 [119910(119894)
1120583(119895)119879
1] = 119867
(119894)
1X(119894)
1+M(119895119894)119879
1119867
(119895)119879
1+ 119877(119894119895)
1
(27)
So the expression for Π(119894119895)119896
is immediately derived Theexpression forΠ(119894119895)
119896119896minus1is obtained by analogous reasoning
42 Distributed Fusion Filter Design Aswe have already indi-cated our goal is to obtain a distributed fusionfilter119909(119863)
119896119896 gen-
erated by aweighted sumof the local estimatorssum119898119894=1119865(119894)
119896119909(119894)
119896119896
in which the weight matrices 119865(119894)119896 119894 = 1 2 119898 are com-
puted to minimize the mean squared estimation errorSo by denoting 119883
119896119896= (119909(1)119879
119896119896 119909
(119898)119879
119896119896)119879 and F
119896=
(119865(1)
119896 119865
(119898)
119896) the aim is to findF
119896such that the estimator
F119896119883119896119896
minimizes
119864 [(119909119896minusF119896119883119896119896) (119909119896minusF119896119883119896119896)
119879
] (28)
6 Discrete Dynamics in Nature and Society
As it is well known the solution of this problem is given bythe matrix
Fopt119896= 119864 [119909
119896119883119879
119896119896] (119864 [119883
119896119896119883119879
119896119896])
minus1
119896 ge 1 (29)
The following theorem provides the proposed distributedfusion filtering estimators 119909(119863)
119896119896 and their error covariance
matrices Σ(119863)119896119896
Theorem 8 Let 119883119896119896
= (119909(1)119879
119896119896 119909
(119898)119879
119896119896)119879 be the vector
formed by the local LS filtering estimators calculated inTheorem 4 Then the distributed fusion filter is given by
119909(119863)
119896119896= Ξ119896119896119870minus1
119896119896119883119896119896 119896 ge 1 (30)
where
119870119896119896= (119870(119894119895)
119896119896)119894119895=1119898
Ξ119896119896= (119870(1)
119896119896 119870
(119898)
119896119896)
(31)
and 119870(119894119895)119896119896= 119864[119909
(119894)
119896119896119909(119895)119879
119896119896] 119894 119895 = 1 2 119898 are computed by
119870(119894119895)
119896119896= 119870(119894119895)
119896119896minus1+ 119871(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896+X(119894)
119896Π(119894)minus1
119896119871(119895119894)119879
119896
+X(119894)
119896Π(119894)minus1
119896Π(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896
119896 ge 1 119894 = 119895
119870(119894)
119896119896= D119896minus Σ(119894)
119896119896 119896 ge 1
(32)
with 119870(119894119895)119896119896minus1
119871(119894119895)119896 and Π(119894119895)
119896given in Lemmas 5 6 and 7
respectivelyThe error covariance matrices of the distributed fusion
filtering estimators are computed by
Σ(119863)
119896119896= D119896minus Ξ119896119896119870minus1
119896119896Ξ119879
119896119896 119896 ge 1 (33)
Proof Expressions (30) and (33) for the distributed estima-tors and their error covariance matrices respectively areimmediately derived from (29) Expression (32) for the cross-covariancematrices between local filtering estimators followseasily using expression (8) of such estimators
5 Numerical Simulation Example
Consider the following discrete-time linear networked sys-tem with state-dependent multiplicative noise and scalarmeasurements from four sensors
119909119896= (095 + 02120598
119896minus1) 119909119896minus1+ 119908119896minus1 119896 ge 1
119910(119894)
119896= 119867(119894)
119896119909119896+ V(119894)119896 119896 ge 1 119894 = 1 2 3 4
(34)
where 120598119896 119896 ge 0 is a zero-meanGaussianwhite process with
unit varianceThe additive noises are defined as119908119896= 06(120578
119896+
120578119896+1) and V(119894)
119896= 119888(119894)
119896(120578119896minus1
+ 120578119896) 119894 = 1 2 3 4 where 119888(1)
119896= 1
119888(2)
119896= 05 119888(3)
119896= 075 and 119888(4)
119896= 085 and 120578
119896 119896 ge 0 is a
zero-mean Gaussian white process with variance 05
For 119894 = 1 2 3 4 the random parameter matrices119867(119894)119896
aredefined as follows
(i) 119867(1)119896
= 082120582(1)
119896 where 120582(1)
119896 119896 ge 1 is a sequence
of independent and identically distributed (iid) ran-dom variables uniformly distributed over [03 07]
(ii) 119867(2)119896= 075120582
(2)
119896 where 120582(2)
119896 119896 ge 1 is a sequence of
iid discrete randomvariables with119875[120582(2)119896= 0] = 01
119875[120582(2)
119896= 05] = 05 and 119875[120582(2)
119896= 1] = 04
(iii) 119867(3)119896
= 074120582(3)
119896 where 120582(3)
119896 119896 ge 1 is a Bernoulli
process with 119875[120582(3)119896= 1] = 119901
(3) forall119896
(iv) 119867(4)119896= 120582(4)
119896(075 + 095120585
119896) where 120582(4)
119896 119896 ge 1 is a
Bernoulli process with 119875[120582(4)119896= 1] = 119901
(4) forall119896 and120585119896 119896 ge 0 is a zero-mean Gaussian white process
with unit varianceNote that the random parameter matrices at each sensor
119867(119894)
119896 allow modeling different types of uncertainty Namely
in sensors 1 and 2 as in [13] the scalar random variables 120582(119894)119896
take values over the interval [0 1] and represent continuousand discrete stochastic sensor gain degradation respectivelyIn sensor 3120582(3)
119896are Bernoulli randomvariables thus covering
the phenomenon of missing measurements with 120582(3)119896= 1
meaning that the signal 119909119896is present in the measurement 119910(3)
119896
coming from the third sensor at time 119896 while 120582(119894)119896= 0means
that the signal is missing in the measured data at time 119896 orequivalently that such observation is only noise V(3)
119896 Finally
as in [5] bothmissingmeasurements andmultiplicative noiseare considered in sensor 4
To illustrate the feasibility and effectiveness of the pro-posed algorithms they were implemented in MATLAB andone hundred iterations of the algorithms were run Usingsimulated values both centralized and distributed filteringestimates were calculated as well as the corresponding errorvariances in order to measure the estimation accuracy
The error variances of the local centralized and dis-tributed fusion filters are compared considering fixed values119901(3)
= 05 119901(4) = 075 In Figure 1 we can see that theerror variances of the distributed fusion filter are significantlysmaller than those of every local filter but lightly greaterthan those of the centralized filter Nevertheless althoughthe centralized fusion filter outperforms the distributed onethis difference is slight and both filters perform similarly andprovide good estimations Besides this slight difference iscompensated by the fact that the distributed fusion structurereduces the computational cost and has the advantage ofbetter robustness and fault tolerance For example assumingthat the fourth sensor is faulty and themeasurement equationis given by 119910(4)
119896= 119867(4)
119896119909119896+ V(4)119896+ 119886119896 where 119886
119896= 05119896 for
50 le 119896 le 70 and 119886119896= 0 otherwise Figure 2 displays the
corresponding filtering mean square errors of one thousandindependent simulations at each sampling time 119896 showingthat the distributed fusion method has better fault-toleranceabilities than the centralized one
Next we analyze the centralized and distributed filteringaccuracy in function of the probabilities 119901(3) and 119901(4) of
Discrete Dynamics in Nature and Society 7
Centralized filtering error variancesDistributed filtering error variancesLocal filtering error variances (sensor 1)Local filtering error variances (sensor 2)Local filtering error variances (sensor 3)Local filtering error variances (sensor 4)
10 20 30 40 50 60 70 80 90 1000Iteration k
0
05
1
15
2
25
3
35
Filte
ring
erro
r var
ianc
es
Figure 1 Error variance comparison of the centralized distributedand local filtering estimators
MSE centralized filterMSE distributed filter
10 20 30 40 50 60 70 80 90 1000Iteration k
0
1
2
3
4
5
6
7
8
Mea
n sq
uare
erro
rs
Figure 2 Centralized and distributed filtering mean square errors
the Bernoulli variables that model uncertainties of the obser-vations coming from sensors 3 and 4 respectively Specifi-cally the filter performances are analyzed when 119901(3) is variedfrom 01 to 09 and different values of 119901(4) are consideredSince the behavior of the error variances is analogous in allthe iterations only the results of a specific iteration (119896 = 100)
Distributed error variances
Centralized error variances
05
055
06
065
07
075
08
Filte
ring
erro
r var
ianc
es
p(4) = 03
p(4) = 05
p(4) = 07
p(4) = 09
050302 0604 0807 0901Probability p(3)
Figure 3 Centralized and distributed filtering error variances at 119896 =100 versus 119901(3) when 119901(4) = 03 05 07 and 09
are shown here In Figure 3 the centralized and distributedfiltering error variances are displayed versus 119901(3) for 119901(4) =03 05 07 and 09 As expected from this figure it isconcluded that as 119901(3) or 119901(4) increase the centralized anddistributed error variances both become smaller and hencethe performance of the centralized and distributed filtersimproves as these probabilities increase
Finally to evaluate the performance of the proposed fil-ters in comparisonwith other filters reported in the literaturethe filtering mean square error (MSE) at each sampling time119896 is calculated To compute the MSE one thousand indepen-dent simulations were considered and one hundred iterationsof each algorithm were performed considering the values119901(3)
= 05119901(4) = 075 A comparative analysis was carried outbetween the proposed centralized and distributed filters andthe following filters
(i) The centralized Kalman filter for systems with inde-pendent additive noises
(ii) The centralized filter for multisensor systems withmultiplicative noises in the state and observationequations missing measurements and noise correla-tion at the same sampling time [5]
(iii) The centralized filter for networked systems withmultiplicative noise in the state equation stochasticsensor gain degradation and independent additivenoises [13]
The results of these comparisons are displayed in Figure 4which shows that the proposed centralized and distributedfilters perform better than the other three centralized filtersTheKalmanfilter provides theworst estimations since neithermultiplicative noises nor missing measurements are taken
8 Discrete Dynamics in Nature and Society
Centralized Kalman filter Filter in [13]Filter in [5]Proposed centralized filter
Proposed distributed filter
0
05
1
15
2
25
3
35
4
45
Mea
n sq
uare
erro
rs
10 20 30 40 50 60 70 80 90 1000Iteration k
Figure 4 Mean square errors when 119901(3) = 05 119901(4) = 075
into accountThe performance of the filter in [5] is better thanthat of the filter in [13] since the latter ignores any correlationassumption and multiplicative observation noise in sensor 4is not taken into account
6 Conclusion
Thedistributed fusion filtering problemhas been investigatedfor multisensor stochastic systems with random parametermatrices and correlated noises The main outcomes andresults can be summarized as follows
(i) Recursive algorithms for the local LS linear filters ofthe system state based on the measured output datacoming from each sensor have been designed by aninnovation approach The computational procedureof these local filtering algorithms is very simple andsuitable for online applications
(ii) Once the local filters have been obtained a distributedfusion filter has been designed as thematrix-weightedsum of such local estimators which minimizes themean squared estimation error The error covariancematrices of such distributed fusion filter have beenalso derived
(iii) A numerical simulation example has illustrated theusefulness of the proposed results Error variancecomparison has shown that both the centralized andthe distributed filters outperform the local ones thisexample has also shown that the slight superiorityof the centralized filter over the distributed filter iscompensated by better robustness and fault-toleranceabilities of the latter This example has also high-lighted the applicability of the proposed algorithmfor a great variety of multisensor systems featuring
network-induced stochastic uncertainties such assensor gain degradation missing measurements ormultiplicative observation noises which can be dealtwith in the observation model considered in thispaper
A challenging further research topic is to address the esti-mation problem for this kind of system with random param-eter matrices considering a sensor network whose nodes aredistributed according to a given topology characterized by adirected graph Also an interesting future research topic is toconsider other kinds of stochastic uncertainties which oftenappear in networked systems such as random delays andpacket dropouts
Appendix
Proof of Theorem 4
This appendix provides the proof of Theorem 4 by aninnovation approach For the 119894th sensor the innovation attime 119896 is defined as 120583(119894)
119896= 119910(119894)
119896minus 119910(119894)
119896119896minus1 where 119910(119894)
119896119896minus1is
the LS linear estimator of 119910(119894)119896
based on measurements 119910(119894)119904
119904 le 119896minus1 Replacing the observation process by the innovationone the LS linear estimator (119894)
119896119871 of a random vector 119911
119896based
on the observations 119910(119894)1 119910
(119894)
119871 can be calculated as linear
combination of the innovations 120583(119894)1 120583
(119894)
119871 namely
(119894)
119896119871=
119871
sum
119904=1
119864 [119911119896120583(119894)119879
119904] (119864 [120583
(119894)
119904120583(119894)119879
119904])
minus1
120583(119894)
119904 119896 ge 1 (A1)
From system equations (1)-(2) and the OPL the statepredictor 119909(119894)
119896119896minus1 and the observation predictor 119910(119894)
119896119896minus1 verify
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+ 119908(119894)
119896minus1119896minus1 119896 ge 1 (A2)
119910(119894)
119896119896minus1= 119867
(119894)
119896119909(119894)
119896119896minus1+ V(119894)119896119896minus1
119896 ge 1 (A3)
Because of the correlation assumption (iii) the noise filter119908(119894)
119896119896and the one-stage noise predictor V(119894)
119896119896minus1are not equal
to zero and hence expressions for such estimators must becalculated
LS Linear Noise Estimators 119908(119894)119896119896
and V(119894)119896119896minus1
From the generalexpression for estimators (A1) taking into account the factthat by Remark 3
119864 [119908119896120583(119894)119879
119896] = 119864 [119908
119896119910(119894)119879
119896] =W
(119894)
119896
119864 [V(119894)119896120583(119894)119879
119896minus1] = 119864 [V(119894)
119896119910(119894)119879
119896minus1] =V
(119894)
119896119896minus1
(A4)
we have that the noise filter 119908(119894)119896119896
and the one-stage noisepredictor V(119894)
119896119896minus1 satisfy
119908(119894)
119896119896=W(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119908
(119894)
00= 0 (A5)
V(119894)119896119896minus1
=V(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 V(119894)
10= 0 (A6)
Discrete Dynamics in Nature and Society 9
Now we will prove the local filtering algorithm by severalsteps
(I) Derivation of the Filter (8) One-Stage State Predictor (9)andTheir Error CovarianceMatrices (10) and (11) RespectivelyFrom (A1) by denoting X
(119894)
119896= 119864[119909
119896120583(119894)119879
119896] and Π(119894)
119896=
119864[120583(119894)
119896120583(119894)119879
119896] expression (8) for the filter is obvious and from
this relation and theOPL we obtain (10) for the filtering errorcovariance
From (A2) and (A5) expression (9) withW(119894)119896satisfying
(6) for the state predictor is immediately obtained Thisexpression together with state equation (1) leads to (11) for theprediction error covariance matrix whereD
119896is given by (5)
andJ(119894)
119896= 119864[(119909
119896minus 119909(119894)
119896119896)119908119879
119896] clearly satisfies (12)
(II) Derivation of (13) for the Matrix X(119894)119896= 119864[119909
119896120583(119894)119879
119896] From
(8) and (9) the following recursive expression for the statepredictor is obtained
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus2+X(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 (A7)
where from (1) thematrixX(119894)119896119896minus1
= 119864[119909119896120583(119894)119879
119896minus1] clearly verifies
(15)Using relation (A7) and again (1) we obtain that the
correlation between the prediction error and the noiseM(119894)
119896equiv 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119894)119879119896] satisfies (14) This correlation
property allows us to obtain easily expression (13) for thematrixX(119894)
119896= 119864[119909
119896120583(119894)119879
119896] Indeed by the OPL we haveX(119894)
119896=
119864[(119909119896minus119909(119894)
119896119896minus1)119910(119894)119879
119896] and from (2) expression (13) forX(119894)
119896is
obtained
(III) Derivation of Innovation (16) and Its Covariance Matrix(17) From (A3) and (A6) it is clear that the innovation isgiven by (16) withV(119894)
119896119896minus1satisfying (7) Next expression (17)
for Π(119894)119896= 119864[120583
(119894)
119896120583(119894)119879
119896] is derived From the OPL and (2) we
have that
Π(119894)
119896= 119864 [119910
(119894)
119896120583(119894)119879
119896]
= 119867
(119894)
119896119864 [119909119896120583(119894)119879
119896] + 119864 [
(119894)
119896119909119896120583(119894)119879
119896]
+ 119864 [V(119894)119896120583(119894)119879
119896]
(A8)
(i) Again from the OPL and (2) and the conditionalexpectation properties
119864 [(119894)
119896119909119896120583(119894)119879
119896] = 119864 [
(119894)
119896119909119896119909119879
119896(119894)119879
119896]
= 119864 [(119894)
119896D119896(119894)119879
119896] 119896 ge 1
(A9)
(ii) Using (16) for 120583(119894)119896 with (2) for 119910(119894)
119896 we obtain that
119864 [V(119894)119896120583(119894)119879
119896] =M
(119894)119879
119896119867
(119894)119879
119896+ 119877(119894)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
119864 [V(119894)1120583(119894)119879
1] =M
(119894)119879
1119867
(119894)119879
1+ 119877(119894)
1
(A10)
Substituting the above expectations into (A8) we easilyobtain (17) and the proof is completed
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This research is supported by Ministerio de Economıa yCompetitividad (Grant no MTM2014-52291-P and FPU pro-gramme)
References
[1] S-L Sun ldquoMulti-sensor optimal information fusion Kalmanfilters with applicationsrdquo Aerospace Science and Technology vol8 no 1 pp 57ndash62 2004
[2] X Sun and G Yan ldquoDistributed state fusion Kalman predictorbased onWLS algorithmrdquoProcedia Engineering vol 29 pp 216ndash222 2012
[3] C Ran andZDeng ldquoSelf-tuningweightedmeasurement fusionKalman filtering algorithmrdquo Computational Statistics amp DataAnalysis vol 56 no 6 pp 2112ndash2128 2012
[4] Y Song G Wei and G Yang ldquoDistributed 119867infin
filtering for aclass of sensor networks with uncertain rates of packet lossesrdquoSignal Processing vol 104 pp 143ndash151 2014
[5] J Ma and S Sun ldquoCentralized fusion estimators for multi-sensor systems withmultiplicative noises andmissingmeasure-mentsrdquo Journal of Networks vol 7 no 10 pp 1538ndash1545 2012
[6] L Li and Y Xia ldquoUnscented kalman filter over unreliable com-munication networks with markovian packet dropoutsrdquo IEEETransactions on Automatic Control vol 58 no 12 pp 3224ndash3230 2013
[7] X He Z Wang X Wang and D H Zhou ldquoNetworked strongtracking filteringwithmultiple packet dropouts algorithms andapplicationsrdquo IEEE Transactions on Industrial Electronics vol61 no 3 pp 1454ndash1463 2014
[8] S Wang H Fang and X Tian ldquoRecursive estimation for non-linear stochastic systems with multi-step transmission delaysmultiple packet dropouts and correlated noisesrdquo Signal Process-ing vol 115 pp 164ndash175 2015
[9] D Chen Y Yu L Xu and X Liu ldquoKalman filtering for discretestochastic systems with multiplicative noises and random two-step sensor delaysrdquoDiscreteDynamics inNature and Society vol2015 Article ID 809734 11 pages 2015
[10] X Shen Y Luo Y Zhu and E Song ldquoGlobally optimaldistributed Kalman filtering fusionrdquo Science China InformationSciences vol 55 no 3 pp 512ndash529 2012
[11] J Feng Z Wang and M Zeng ldquoDistributed weighted robustKalman filter fusion for uncertain systems with autocorrelatedand cross-correlated noisesrdquo Information Fusion vol 14 no 1pp 78ndash86 2013
[12] C Sanchez-Gonzalez and T M Garcıa-Munoz ldquoRecursivelinear estimation for discrete-time systems in the presence ofdifferent multiplicative observation noisesrdquo Discrete Dynamicsin Nature and Society vol 2010 Article ID 875023 12 pages2010
[13] Y Liu X He Z Wang and D Zhou ldquoOptimal filtering fornetworked systems with stochastic sensor gain degradationrdquoAutomatica vol 50 no 5 pp 1521ndash1525 2014
10 Discrete Dynamics in Nature and Society
[14] Y Luo Y Zhu D Luo J Zhou E Song and DWang ldquoGloballyoptimal multisensor distributed random parameter matricesKalman filtering fusion with applicationsrdquo Sensors vol 8 no12 pp 8086ndash8103 2008
[15] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[16] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoCovariance-based estimation from multisensor delayed mea-surements with random parameter matrices and correlatednoisesrdquoMathematical Problems in Engineering vol 2014 ArticleID 958474 13 pages 2014
[17] J Linares-Perez R Caballero-Aguila and I Garcıa-GarridoldquoOptimal linear filter design for systems with correlation inthe measurement matrices and noises recursive algorithm andapplicationsrdquo International Journal of Systems Science vol 45no 7 pp 1548ndash1562 2014
[18] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoOptimal state estimation for networked systems with randomparameter matrices correlated noises and delayed measure-mentsrdquo International Journal of General Systems vol 44 no 2pp 142ndash154 2015
[19] J Feng and M Zeng ldquoOptimal distributed Kalman filteringfusion for a linear dynamic systemwith cross-correlated noisesrdquoInternational Journal of Systems Science vol 43 no 2 pp 385ndash398 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Discrete Dynamics in Nature and Society
linear combination of the local filtering estimators Hencethe distributed fusion filtering algorithm is performed in twosteps In the first one (Section 3) for each 119894 = 1 2 119898 alocal LS linear estimator of the signal 119909
119896 denoted by 119909(119894)
119896119896 is
produced using themeasurements119910(119894)1 119910
(119894)
119896 by a recursive
algorithm In the second step (Section 4) a fusion distributedestimator 119909(119863)
119896119896 is generated by a matrix-weighted linear
combination of the local estimators 119909(119894)119896119896
119894 = 1 2 119898using the mean squared error as optimality criterion
3 Local LS Linear Filtering Algorithm
This section is concerned with the problem of obtaining arecursive algorithm for the local LS linear filter at each sensor119894 for 119894 = 1 119898 by using an innovation approach
Theorem4 For system (1)-(2) under assumptions (i)ndash(iv) thelocal LS linear filter 119909(119894)
119896119896 is given by
119909(119894)
119896119896= 119909(119894)
119896119896minus1+X(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119909
(119894)
00= 1199090 (8)
where the one-stage state predictor 119909(119894)119896119896minus1
satisfies
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+W(119894)
119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2
119909(119894)
10= 11986501199090
(9)
The filtering error covariance matrix Σ(119894)119896119896
is given by
Σ(119894)
119896119896= Σ(119894)
119896119896minus1minusX(119894)
119896Π(119894)minus1
119896X(119894)119879
119896 119896 ge 1 Σ
(119894)
00= Σ0 (10)
where the prediction error covariance matrix Σ(119894)119896119896minus1
is calcu-lated by
Σ(119894)
119896119896minus1= 119865119896minus1Σ(119894)
119896minus1119896minus1119865
119879
119896minus1+ 119864 [119865
119896minus1D119896minus1119865119879
119896minus1]
+ 119876119896minus1+ 119865119896minus1
J(119894)
119896minus1+J(119894)119879
119896minus1119865
119879
119896minus1
minusW(119894)
119896minus1Π(119894)minus1
119896minus1W(119894)119879
119896minus1 119896 ge 2
Σ(119894)
10= 1198650Σ00119865
119879
0+ 119864 [119865
0D0119865119879
0] + 1198760
(11)
with
J(119894)
119896= 119876119896minus1119896
minusX(119894)
119896Π(119894)minus1
119896W(119894)119879
119896 119896 ge 1 (12)
The matrixX(119894)119896is obtained by
X(119894)
119896= Σ(119894)
119896119896minus1119867
(119894)119879
119896+M(119894)
119896 119896 ge 1 (13)
whereM(119894)119896is given by
M(119894)
119896= 119865119896minus1119878(119894)
119896minus2119896+ 119878(119894)
119896minus1119896minusX(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1
119896 ge 2
M(119894)
1= 119878(119894)
01
(14)
with
X(119894)
119896119896minus1= 119865119896minus1
X(119894)
119896minus1+W(119894)
119896minus1 119896 ge 2 (15)
The innovation 120583(119894)119896 is given by
120583(119894)
119896= 119910(119894)
119896minus 119867
(119894)
119896119909(119894)
119896119896minus1minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2
120583(119894)
1= 119910(119894)
1minus 119867
(119894)
1119909(119894)
10
(16)
and the innovation covariance matrix Π(119894)119896 satisfies
Π(119894)
119896= 119864 [
(119894)
119896D119896(119894)119879
119896] + 119867
(119894)
119896X(119894)
119896+M(119894)119879
119896119867
(119894)119879
119896
+ 119877(119894)
119896minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
Π(119894)
1= 119864 [
(119894)
1D1(119894)119879
1] + 119867
(119894)
1X(119894)
1+M(119894)119879
1119867
(119894)119879
1
+ 119877(119894)
1
(17)
The matrices D119896 W(119894)119896 and V
(119894)
119896119896minus1are given in (5) (6) and
(7) respectively
Proof See Appendix
The computational procedure of the proposed local LSlinear filtering algorithm can be summarized as follows
The matrices W(119894)119896
and V(119894)
119896119896minus1are computed by expres-
sions (6) and (7) respectively We obtain D119896recursively by
(5) where thematrix119864[119865119896minus1
D119896minus1119865119879
119896minus1] necessary to compute
D119896and Σ(119894)
119896119896minus1 is obtained as indicated in Remark 1 The
matrix 119864[(119894)119896D119896(119894)119879
119896] is also computed in order to obtain
the innovation covariance matrix Π(119894)119896 Note that all these
matrices depend only on the system model information andcan be obtained before the observations are available
At the sampling time 119896 once (119896minus1)th iteration is finishedand the new observation 119910(119894)
119896is available starting with the
prior knowledge including X(119894)
119896minus1 120583(119894)119896minus1
Π(119894)119896minus1
119909(119894)119896119896minus1
andΣ(119894)
119896119896minus1 the proposed filtering algorithm operates as follows
Step 1 From (15) X(119894)119896119896minus1
is computed and from it M(119894)119896
isprovided by (14) and thenX
(119894)
119896is obtained by (13)
Step 2 The innovation 120583(119894)119896
and its covariance matrix Π(119894)119896are
computed by (16) and (17) respectively
Step 3 The filter 119909(119894)119896119896
and the filtering error covariancematrix Σ(119894)
119896119896 are computed by (8) and (10) respectively
Step 4 To implement the above steps at time 119896 + 1 we must
(1) compute the state predictor 119909(119894)119896+1119896
by (9)
(2) compute J(119894)
119896by (12) and from this the prediction
error covariance matrix Σ(119894)119896+1119896
by (11)
Discrete Dynamics in Nature and Society 5
4 Distributed Fusion Filtering Estimators
Once the local LS linear filters 119909(119894)119896119896
for each sensor 119894 =1 2 119898 have been obtained our objective in this section isto design a distributed fusion filter119909(119863)
119896119896 by amatrix-weighted
linear combination of such estimators which minimizes themean squared estimation error To simplify the derivationof the proposed fusion estimators we previously presentsome useful lemmas that provide the expectations 119870(119894119895)
119896119896minus1=
119864[119909(119894)
119896119896minus1119909(119895)119879
119896119896minus1] 119871(119894119895)119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] and Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)
119896]
necessary for subsequent calculations The assumptions andnotation in these lemmas are those of Section 3
41 Preliminary Results
Lemma 5 For 119894 119895 = 1 2 119898 the cross-covariancematrix between any two local state predictors 119870(119894119895)
119896119896minus1=
119864[119909(119894)
119896119896minus1119909(119895)119879
119896119896minus1] satisfies
119870(119894119895)
119896119896minus1= 119865119896minus1119870(119894119895)
119896minus1119896minus2119865
119879
119896minus1+ 119865119896minus1119871(119894119895)
119896minus1Π(119895)minus1
119896minus1X(119895)119879
119896119896minus1
+X(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1Π(119895)minus1
119896minus1X(119895)119879
119896119896minus1
+X(119894)
119896119896minus1Π(119894)minus1
119896minus1119871(119895119894)119879
119896minus1119865
119879
119896minus1 119896 ge 2 119894 = 119895
119870(119894119895)
10= 11986501199090119909119879
0119865
119879
0
119870(119894)
119896119896minus1= D119896minus Σ(119894)
119896119896minus1 119896 ge 1
(18)
Proof Using (A7) and the fact that 119871(119894119895)119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] and
Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)
119896] the proof of this lemma is immediately
clear
Lemma 6 For 119894 119895 = 1 2 119898 and 119894 = 119895 the expectation119871(119894119895)
119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] satisfies
119871(119894119895)
119896= (119870(119894)
119896119896minus1minus 119870(119894119895)
119896119896minus1)119867
(119895)119879
119896+X(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1
minus 119871(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1 119896 ge 2
119871(119894119895)
1= 0
(19)
where 119871(119894119895)119896119896minus1
= 119864[119909(119894)
119896119896minus1120583(119895)119879
119896minus1] is given by
119871(119894119895)
119896119896minus1= 119865119896minus1119871(119894119895)
119896minus1+X(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1 119896 ge 2 (20)
Proof Taking into account expression (16) for 120583(119895)119896 we have
that
119871(119894119895)
119896= 119864 [119909
(119894)
119896119896minus1119910(119895)119879
119896] minus 119870(119894119895)
119896119896minus1119867
(119895)119879
119896
minus 119871(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1
(21)
Now using (2) for 119910(119895)119896 (A7) for 119909(119894)
119896119896minus1 and the OPL we
obtain
119864 [119909(119894)
119896119896minus1119910(119895)119879
119896] = 119870
(119894)
119896119896minus1119867
(119895)119879
119896+X(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1 (22)
From the above relations the expression for 119871(119894119895)119896
is immedi-ately derived
Using again (A7) for 119909(119894)119896119896minus1
expression for 119871(119894119895)119896119896minus1
is alsoimmediately clear and the proof is completed
Lemma 7 For 119894 119895 = 1 2 119898 and 119894 = 119895 the innovationcross-covariance matrix Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)119879
119896] satisfies
Π(119894119895)
119896= 119867
(119894)
119896(X(119895)
119896minus 119871(119894119895)
119896) +M
(119895119894)119879
119896119867
(119895)119879
119896+ 119877(119894119895)
119896
minusV(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119895119894)119879
119896119896minus1 119896 ge 2
Π(119894119895)
1= 119867
(119894)
1(X(119895)
1minus 119871(119894119895)
1) +M
(119895119894)119879
1119867
(119895)119879
1+ 119877(119894119895)
1
(23)
whereM(119894119895)119896= 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119895)119879119896] is given by
M(119894119895)
119896= 119865119896minus1119878(119895)
119896minus2119896+ 119878(119895)
119896minus1119896minusX(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1
119896 ge 2
M(119894119895)
1= 119878(119895)
01
(24)
and Π(119894119895)119896119896minus1
= 119864[120583(119894)
119896120583(119895)119879
119896minus1] is obtained by
Π(119894119895)
119896119896minus1= 119867
(119894)
119896(X(119895)
119896119896minus1minus 119871(119894119895)
119896119896minus1) +V
(119894119895)
119896119896minus1
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1 119896 ge 2
(25)
Proof Using (16) for the innovation 120583(119894)119896 it is clear that
Π(119894119895)
119896= 119864 [119910
(119894)
119896120583(119895)119879
119896] minus 119867
(119894)
119896119871(119894119895)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1119864 [120583(119894)
119896minus1120583(119895)119879
119896]
(26)
Similar reasoning to that used to obtain (17) yields
119864 [119910(119894)
119896120583(119895)119879
119896] = 119867
(119894)
119896X(119895)
119896+M(119895119894)119879
119896119867
(119895)119879
119896+ 119877(119894119895)
119896
minusV(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1 119896 ge 2
119864 [119910(119894)
1120583(119895)119879
1] = 119867
(119894)
1X(119894)
1+M(119895119894)119879
1119867
(119895)119879
1+ 119877(119894119895)
1
(27)
So the expression for Π(119894119895)119896
is immediately derived Theexpression forΠ(119894119895)
119896119896minus1is obtained by analogous reasoning
42 Distributed Fusion Filter Design Aswe have already indi-cated our goal is to obtain a distributed fusionfilter119909(119863)
119896119896 gen-
erated by aweighted sumof the local estimatorssum119898119894=1119865(119894)
119896119909(119894)
119896119896
in which the weight matrices 119865(119894)119896 119894 = 1 2 119898 are com-
puted to minimize the mean squared estimation errorSo by denoting 119883
119896119896= (119909(1)119879
119896119896 119909
(119898)119879
119896119896)119879 and F
119896=
(119865(1)
119896 119865
(119898)
119896) the aim is to findF
119896such that the estimator
F119896119883119896119896
minimizes
119864 [(119909119896minusF119896119883119896119896) (119909119896minusF119896119883119896119896)
119879
] (28)
6 Discrete Dynamics in Nature and Society
As it is well known the solution of this problem is given bythe matrix
Fopt119896= 119864 [119909
119896119883119879
119896119896] (119864 [119883
119896119896119883119879
119896119896])
minus1
119896 ge 1 (29)
The following theorem provides the proposed distributedfusion filtering estimators 119909(119863)
119896119896 and their error covariance
matrices Σ(119863)119896119896
Theorem 8 Let 119883119896119896
= (119909(1)119879
119896119896 119909
(119898)119879
119896119896)119879 be the vector
formed by the local LS filtering estimators calculated inTheorem 4 Then the distributed fusion filter is given by
119909(119863)
119896119896= Ξ119896119896119870minus1
119896119896119883119896119896 119896 ge 1 (30)
where
119870119896119896= (119870(119894119895)
119896119896)119894119895=1119898
Ξ119896119896= (119870(1)
119896119896 119870
(119898)
119896119896)
(31)
and 119870(119894119895)119896119896= 119864[119909
(119894)
119896119896119909(119895)119879
119896119896] 119894 119895 = 1 2 119898 are computed by
119870(119894119895)
119896119896= 119870(119894119895)
119896119896minus1+ 119871(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896+X(119894)
119896Π(119894)minus1
119896119871(119895119894)119879
119896
+X(119894)
119896Π(119894)minus1
119896Π(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896
119896 ge 1 119894 = 119895
119870(119894)
119896119896= D119896minus Σ(119894)
119896119896 119896 ge 1
(32)
with 119870(119894119895)119896119896minus1
119871(119894119895)119896 and Π(119894119895)
119896given in Lemmas 5 6 and 7
respectivelyThe error covariance matrices of the distributed fusion
filtering estimators are computed by
Σ(119863)
119896119896= D119896minus Ξ119896119896119870minus1
119896119896Ξ119879
119896119896 119896 ge 1 (33)
Proof Expressions (30) and (33) for the distributed estima-tors and their error covariance matrices respectively areimmediately derived from (29) Expression (32) for the cross-covariancematrices between local filtering estimators followseasily using expression (8) of such estimators
5 Numerical Simulation Example
Consider the following discrete-time linear networked sys-tem with state-dependent multiplicative noise and scalarmeasurements from four sensors
119909119896= (095 + 02120598
119896minus1) 119909119896minus1+ 119908119896minus1 119896 ge 1
119910(119894)
119896= 119867(119894)
119896119909119896+ V(119894)119896 119896 ge 1 119894 = 1 2 3 4
(34)
where 120598119896 119896 ge 0 is a zero-meanGaussianwhite process with
unit varianceThe additive noises are defined as119908119896= 06(120578
119896+
120578119896+1) and V(119894)
119896= 119888(119894)
119896(120578119896minus1
+ 120578119896) 119894 = 1 2 3 4 where 119888(1)
119896= 1
119888(2)
119896= 05 119888(3)
119896= 075 and 119888(4)
119896= 085 and 120578
119896 119896 ge 0 is a
zero-mean Gaussian white process with variance 05
For 119894 = 1 2 3 4 the random parameter matrices119867(119894)119896
aredefined as follows
(i) 119867(1)119896
= 082120582(1)
119896 where 120582(1)
119896 119896 ge 1 is a sequence
of independent and identically distributed (iid) ran-dom variables uniformly distributed over [03 07]
(ii) 119867(2)119896= 075120582
(2)
119896 where 120582(2)
119896 119896 ge 1 is a sequence of
iid discrete randomvariables with119875[120582(2)119896= 0] = 01
119875[120582(2)
119896= 05] = 05 and 119875[120582(2)
119896= 1] = 04
(iii) 119867(3)119896
= 074120582(3)
119896 where 120582(3)
119896 119896 ge 1 is a Bernoulli
process with 119875[120582(3)119896= 1] = 119901
(3) forall119896
(iv) 119867(4)119896= 120582(4)
119896(075 + 095120585
119896) where 120582(4)
119896 119896 ge 1 is a
Bernoulli process with 119875[120582(4)119896= 1] = 119901
(4) forall119896 and120585119896 119896 ge 0 is a zero-mean Gaussian white process
with unit varianceNote that the random parameter matrices at each sensor
119867(119894)
119896 allow modeling different types of uncertainty Namely
in sensors 1 and 2 as in [13] the scalar random variables 120582(119894)119896
take values over the interval [0 1] and represent continuousand discrete stochastic sensor gain degradation respectivelyIn sensor 3120582(3)
119896are Bernoulli randomvariables thus covering
the phenomenon of missing measurements with 120582(3)119896= 1
meaning that the signal 119909119896is present in the measurement 119910(3)
119896
coming from the third sensor at time 119896 while 120582(119894)119896= 0means
that the signal is missing in the measured data at time 119896 orequivalently that such observation is only noise V(3)
119896 Finally
as in [5] bothmissingmeasurements andmultiplicative noiseare considered in sensor 4
To illustrate the feasibility and effectiveness of the pro-posed algorithms they were implemented in MATLAB andone hundred iterations of the algorithms were run Usingsimulated values both centralized and distributed filteringestimates were calculated as well as the corresponding errorvariances in order to measure the estimation accuracy
The error variances of the local centralized and dis-tributed fusion filters are compared considering fixed values119901(3)
= 05 119901(4) = 075 In Figure 1 we can see that theerror variances of the distributed fusion filter are significantlysmaller than those of every local filter but lightly greaterthan those of the centralized filter Nevertheless althoughthe centralized fusion filter outperforms the distributed onethis difference is slight and both filters perform similarly andprovide good estimations Besides this slight difference iscompensated by the fact that the distributed fusion structurereduces the computational cost and has the advantage ofbetter robustness and fault tolerance For example assumingthat the fourth sensor is faulty and themeasurement equationis given by 119910(4)
119896= 119867(4)
119896119909119896+ V(4)119896+ 119886119896 where 119886
119896= 05119896 for
50 le 119896 le 70 and 119886119896= 0 otherwise Figure 2 displays the
corresponding filtering mean square errors of one thousandindependent simulations at each sampling time 119896 showingthat the distributed fusion method has better fault-toleranceabilities than the centralized one
Next we analyze the centralized and distributed filteringaccuracy in function of the probabilities 119901(3) and 119901(4) of
Discrete Dynamics in Nature and Society 7
Centralized filtering error variancesDistributed filtering error variancesLocal filtering error variances (sensor 1)Local filtering error variances (sensor 2)Local filtering error variances (sensor 3)Local filtering error variances (sensor 4)
10 20 30 40 50 60 70 80 90 1000Iteration k
0
05
1
15
2
25
3
35
Filte
ring
erro
r var
ianc
es
Figure 1 Error variance comparison of the centralized distributedand local filtering estimators
MSE centralized filterMSE distributed filter
10 20 30 40 50 60 70 80 90 1000Iteration k
0
1
2
3
4
5
6
7
8
Mea
n sq
uare
erro
rs
Figure 2 Centralized and distributed filtering mean square errors
the Bernoulli variables that model uncertainties of the obser-vations coming from sensors 3 and 4 respectively Specifi-cally the filter performances are analyzed when 119901(3) is variedfrom 01 to 09 and different values of 119901(4) are consideredSince the behavior of the error variances is analogous in allthe iterations only the results of a specific iteration (119896 = 100)
Distributed error variances
Centralized error variances
05
055
06
065
07
075
08
Filte
ring
erro
r var
ianc
es
p(4) = 03
p(4) = 05
p(4) = 07
p(4) = 09
050302 0604 0807 0901Probability p(3)
Figure 3 Centralized and distributed filtering error variances at 119896 =100 versus 119901(3) when 119901(4) = 03 05 07 and 09
are shown here In Figure 3 the centralized and distributedfiltering error variances are displayed versus 119901(3) for 119901(4) =03 05 07 and 09 As expected from this figure it isconcluded that as 119901(3) or 119901(4) increase the centralized anddistributed error variances both become smaller and hencethe performance of the centralized and distributed filtersimproves as these probabilities increase
Finally to evaluate the performance of the proposed fil-ters in comparisonwith other filters reported in the literaturethe filtering mean square error (MSE) at each sampling time119896 is calculated To compute the MSE one thousand indepen-dent simulations were considered and one hundred iterationsof each algorithm were performed considering the values119901(3)
= 05119901(4) = 075 A comparative analysis was carried outbetween the proposed centralized and distributed filters andthe following filters
(i) The centralized Kalman filter for systems with inde-pendent additive noises
(ii) The centralized filter for multisensor systems withmultiplicative noises in the state and observationequations missing measurements and noise correla-tion at the same sampling time [5]
(iii) The centralized filter for networked systems withmultiplicative noise in the state equation stochasticsensor gain degradation and independent additivenoises [13]
The results of these comparisons are displayed in Figure 4which shows that the proposed centralized and distributedfilters perform better than the other three centralized filtersTheKalmanfilter provides theworst estimations since neithermultiplicative noises nor missing measurements are taken
8 Discrete Dynamics in Nature and Society
Centralized Kalman filter Filter in [13]Filter in [5]Proposed centralized filter
Proposed distributed filter
0
05
1
15
2
25
3
35
4
45
Mea
n sq
uare
erro
rs
10 20 30 40 50 60 70 80 90 1000Iteration k
Figure 4 Mean square errors when 119901(3) = 05 119901(4) = 075
into accountThe performance of the filter in [5] is better thanthat of the filter in [13] since the latter ignores any correlationassumption and multiplicative observation noise in sensor 4is not taken into account
6 Conclusion
Thedistributed fusion filtering problemhas been investigatedfor multisensor stochastic systems with random parametermatrices and correlated noises The main outcomes andresults can be summarized as follows
(i) Recursive algorithms for the local LS linear filters ofthe system state based on the measured output datacoming from each sensor have been designed by aninnovation approach The computational procedureof these local filtering algorithms is very simple andsuitable for online applications
(ii) Once the local filters have been obtained a distributedfusion filter has been designed as thematrix-weightedsum of such local estimators which minimizes themean squared estimation error The error covariancematrices of such distributed fusion filter have beenalso derived
(iii) A numerical simulation example has illustrated theusefulness of the proposed results Error variancecomparison has shown that both the centralized andthe distributed filters outperform the local ones thisexample has also shown that the slight superiorityof the centralized filter over the distributed filter iscompensated by better robustness and fault-toleranceabilities of the latter This example has also high-lighted the applicability of the proposed algorithmfor a great variety of multisensor systems featuring
network-induced stochastic uncertainties such assensor gain degradation missing measurements ormultiplicative observation noises which can be dealtwith in the observation model considered in thispaper
A challenging further research topic is to address the esti-mation problem for this kind of system with random param-eter matrices considering a sensor network whose nodes aredistributed according to a given topology characterized by adirected graph Also an interesting future research topic is toconsider other kinds of stochastic uncertainties which oftenappear in networked systems such as random delays andpacket dropouts
Appendix
Proof of Theorem 4
This appendix provides the proof of Theorem 4 by aninnovation approach For the 119894th sensor the innovation attime 119896 is defined as 120583(119894)
119896= 119910(119894)
119896minus 119910(119894)
119896119896minus1 where 119910(119894)
119896119896minus1is
the LS linear estimator of 119910(119894)119896
based on measurements 119910(119894)119904
119904 le 119896minus1 Replacing the observation process by the innovationone the LS linear estimator (119894)
119896119871 of a random vector 119911
119896based
on the observations 119910(119894)1 119910
(119894)
119871 can be calculated as linear
combination of the innovations 120583(119894)1 120583
(119894)
119871 namely
(119894)
119896119871=
119871
sum
119904=1
119864 [119911119896120583(119894)119879
119904] (119864 [120583
(119894)
119904120583(119894)119879
119904])
minus1
120583(119894)
119904 119896 ge 1 (A1)
From system equations (1)-(2) and the OPL the statepredictor 119909(119894)
119896119896minus1 and the observation predictor 119910(119894)
119896119896minus1 verify
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+ 119908(119894)
119896minus1119896minus1 119896 ge 1 (A2)
119910(119894)
119896119896minus1= 119867
(119894)
119896119909(119894)
119896119896minus1+ V(119894)119896119896minus1
119896 ge 1 (A3)
Because of the correlation assumption (iii) the noise filter119908(119894)
119896119896and the one-stage noise predictor V(119894)
119896119896minus1are not equal
to zero and hence expressions for such estimators must becalculated
LS Linear Noise Estimators 119908(119894)119896119896
and V(119894)119896119896minus1
From the generalexpression for estimators (A1) taking into account the factthat by Remark 3
119864 [119908119896120583(119894)119879
119896] = 119864 [119908
119896119910(119894)119879
119896] =W
(119894)
119896
119864 [V(119894)119896120583(119894)119879
119896minus1] = 119864 [V(119894)
119896119910(119894)119879
119896minus1] =V
(119894)
119896119896minus1
(A4)
we have that the noise filter 119908(119894)119896119896
and the one-stage noisepredictor V(119894)
119896119896minus1 satisfy
119908(119894)
119896119896=W(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119908
(119894)
00= 0 (A5)
V(119894)119896119896minus1
=V(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 V(119894)
10= 0 (A6)
Discrete Dynamics in Nature and Society 9
Now we will prove the local filtering algorithm by severalsteps
(I) Derivation of the Filter (8) One-Stage State Predictor (9)andTheir Error CovarianceMatrices (10) and (11) RespectivelyFrom (A1) by denoting X
(119894)
119896= 119864[119909
119896120583(119894)119879
119896] and Π(119894)
119896=
119864[120583(119894)
119896120583(119894)119879
119896] expression (8) for the filter is obvious and from
this relation and theOPL we obtain (10) for the filtering errorcovariance
From (A2) and (A5) expression (9) withW(119894)119896satisfying
(6) for the state predictor is immediately obtained Thisexpression together with state equation (1) leads to (11) for theprediction error covariance matrix whereD
119896is given by (5)
andJ(119894)
119896= 119864[(119909
119896minus 119909(119894)
119896119896)119908119879
119896] clearly satisfies (12)
(II) Derivation of (13) for the Matrix X(119894)119896= 119864[119909
119896120583(119894)119879
119896] From
(8) and (9) the following recursive expression for the statepredictor is obtained
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus2+X(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 (A7)
where from (1) thematrixX(119894)119896119896minus1
= 119864[119909119896120583(119894)119879
119896minus1] clearly verifies
(15)Using relation (A7) and again (1) we obtain that the
correlation between the prediction error and the noiseM(119894)
119896equiv 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119894)119879119896] satisfies (14) This correlation
property allows us to obtain easily expression (13) for thematrixX(119894)
119896= 119864[119909
119896120583(119894)119879
119896] Indeed by the OPL we haveX(119894)
119896=
119864[(119909119896minus119909(119894)
119896119896minus1)119910(119894)119879
119896] and from (2) expression (13) forX(119894)
119896is
obtained
(III) Derivation of Innovation (16) and Its Covariance Matrix(17) From (A3) and (A6) it is clear that the innovation isgiven by (16) withV(119894)
119896119896minus1satisfying (7) Next expression (17)
for Π(119894)119896= 119864[120583
(119894)
119896120583(119894)119879
119896] is derived From the OPL and (2) we
have that
Π(119894)
119896= 119864 [119910
(119894)
119896120583(119894)119879
119896]
= 119867
(119894)
119896119864 [119909119896120583(119894)119879
119896] + 119864 [
(119894)
119896119909119896120583(119894)119879
119896]
+ 119864 [V(119894)119896120583(119894)119879
119896]
(A8)
(i) Again from the OPL and (2) and the conditionalexpectation properties
119864 [(119894)
119896119909119896120583(119894)119879
119896] = 119864 [
(119894)
119896119909119896119909119879
119896(119894)119879
119896]
= 119864 [(119894)
119896D119896(119894)119879
119896] 119896 ge 1
(A9)
(ii) Using (16) for 120583(119894)119896 with (2) for 119910(119894)
119896 we obtain that
119864 [V(119894)119896120583(119894)119879
119896] =M
(119894)119879
119896119867
(119894)119879
119896+ 119877(119894)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
119864 [V(119894)1120583(119894)119879
1] =M
(119894)119879
1119867
(119894)119879
1+ 119877(119894)
1
(A10)
Substituting the above expectations into (A8) we easilyobtain (17) and the proof is completed
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This research is supported by Ministerio de Economıa yCompetitividad (Grant no MTM2014-52291-P and FPU pro-gramme)
References
[1] S-L Sun ldquoMulti-sensor optimal information fusion Kalmanfilters with applicationsrdquo Aerospace Science and Technology vol8 no 1 pp 57ndash62 2004
[2] X Sun and G Yan ldquoDistributed state fusion Kalman predictorbased onWLS algorithmrdquoProcedia Engineering vol 29 pp 216ndash222 2012
[3] C Ran andZDeng ldquoSelf-tuningweightedmeasurement fusionKalman filtering algorithmrdquo Computational Statistics amp DataAnalysis vol 56 no 6 pp 2112ndash2128 2012
[4] Y Song G Wei and G Yang ldquoDistributed 119867infin
filtering for aclass of sensor networks with uncertain rates of packet lossesrdquoSignal Processing vol 104 pp 143ndash151 2014
[5] J Ma and S Sun ldquoCentralized fusion estimators for multi-sensor systems withmultiplicative noises andmissingmeasure-mentsrdquo Journal of Networks vol 7 no 10 pp 1538ndash1545 2012
[6] L Li and Y Xia ldquoUnscented kalman filter over unreliable com-munication networks with markovian packet dropoutsrdquo IEEETransactions on Automatic Control vol 58 no 12 pp 3224ndash3230 2013
[7] X He Z Wang X Wang and D H Zhou ldquoNetworked strongtracking filteringwithmultiple packet dropouts algorithms andapplicationsrdquo IEEE Transactions on Industrial Electronics vol61 no 3 pp 1454ndash1463 2014
[8] S Wang H Fang and X Tian ldquoRecursive estimation for non-linear stochastic systems with multi-step transmission delaysmultiple packet dropouts and correlated noisesrdquo Signal Process-ing vol 115 pp 164ndash175 2015
[9] D Chen Y Yu L Xu and X Liu ldquoKalman filtering for discretestochastic systems with multiplicative noises and random two-step sensor delaysrdquoDiscreteDynamics inNature and Society vol2015 Article ID 809734 11 pages 2015
[10] X Shen Y Luo Y Zhu and E Song ldquoGlobally optimaldistributed Kalman filtering fusionrdquo Science China InformationSciences vol 55 no 3 pp 512ndash529 2012
[11] J Feng Z Wang and M Zeng ldquoDistributed weighted robustKalman filter fusion for uncertain systems with autocorrelatedand cross-correlated noisesrdquo Information Fusion vol 14 no 1pp 78ndash86 2013
[12] C Sanchez-Gonzalez and T M Garcıa-Munoz ldquoRecursivelinear estimation for discrete-time systems in the presence ofdifferent multiplicative observation noisesrdquo Discrete Dynamicsin Nature and Society vol 2010 Article ID 875023 12 pages2010
[13] Y Liu X He Z Wang and D Zhou ldquoOptimal filtering fornetworked systems with stochastic sensor gain degradationrdquoAutomatica vol 50 no 5 pp 1521ndash1525 2014
10 Discrete Dynamics in Nature and Society
[14] Y Luo Y Zhu D Luo J Zhou E Song and DWang ldquoGloballyoptimal multisensor distributed random parameter matricesKalman filtering fusion with applicationsrdquo Sensors vol 8 no12 pp 8086ndash8103 2008
[15] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[16] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoCovariance-based estimation from multisensor delayed mea-surements with random parameter matrices and correlatednoisesrdquoMathematical Problems in Engineering vol 2014 ArticleID 958474 13 pages 2014
[17] J Linares-Perez R Caballero-Aguila and I Garcıa-GarridoldquoOptimal linear filter design for systems with correlation inthe measurement matrices and noises recursive algorithm andapplicationsrdquo International Journal of Systems Science vol 45no 7 pp 1548ndash1562 2014
[18] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoOptimal state estimation for networked systems with randomparameter matrices correlated noises and delayed measure-mentsrdquo International Journal of General Systems vol 44 no 2pp 142ndash154 2015
[19] J Feng and M Zeng ldquoOptimal distributed Kalman filteringfusion for a linear dynamic systemwith cross-correlated noisesrdquoInternational Journal of Systems Science vol 43 no 2 pp 385ndash398 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 5
4 Distributed Fusion Filtering Estimators
Once the local LS linear filters 119909(119894)119896119896
for each sensor 119894 =1 2 119898 have been obtained our objective in this section isto design a distributed fusion filter119909(119863)
119896119896 by amatrix-weighted
linear combination of such estimators which minimizes themean squared estimation error To simplify the derivationof the proposed fusion estimators we previously presentsome useful lemmas that provide the expectations 119870(119894119895)
119896119896minus1=
119864[119909(119894)
119896119896minus1119909(119895)119879
119896119896minus1] 119871(119894119895)119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] and Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)
119896]
necessary for subsequent calculations The assumptions andnotation in these lemmas are those of Section 3
41 Preliminary Results
Lemma 5 For 119894 119895 = 1 2 119898 the cross-covariancematrix between any two local state predictors 119870(119894119895)
119896119896minus1=
119864[119909(119894)
119896119896minus1119909(119895)119879
119896119896minus1] satisfies
119870(119894119895)
119896119896minus1= 119865119896minus1119870(119894119895)
119896minus1119896minus2119865
119879
119896minus1+ 119865119896minus1119871(119894119895)
119896minus1Π(119895)minus1
119896minus1X(119895)119879
119896119896minus1
+X(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1Π(119895)minus1
119896minus1X(119895)119879
119896119896minus1
+X(119894)
119896119896minus1Π(119894)minus1
119896minus1119871(119895119894)119879
119896minus1119865
119879
119896minus1 119896 ge 2 119894 = 119895
119870(119894119895)
10= 11986501199090119909119879
0119865
119879
0
119870(119894)
119896119896minus1= D119896minus Σ(119894)
119896119896minus1 119896 ge 1
(18)
Proof Using (A7) and the fact that 119871(119894119895)119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] and
Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)
119896] the proof of this lemma is immediately
clear
Lemma 6 For 119894 119895 = 1 2 119898 and 119894 = 119895 the expectation119871(119894119895)
119896= 119864[119909
(119894)
119896119896minus1120583(119895)119879
119896] satisfies
119871(119894119895)
119896= (119870(119894)
119896119896minus1minus 119870(119894119895)
119896119896minus1)119867
(119895)119879
119896+X(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1
minus 119871(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1 119896 ge 2
119871(119894119895)
1= 0
(19)
where 119871(119894119895)119896119896minus1
= 119864[119909(119894)
119896119896minus1120583(119895)119879
119896minus1] is given by
119871(119894119895)
119896119896minus1= 119865119896minus1119871(119894119895)
119896minus1+X(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1 119896 ge 2 (20)
Proof Taking into account expression (16) for 120583(119895)119896 we have
that
119871(119894119895)
119896= 119864 [119909
(119894)
119896119896minus1119910(119895)119879
119896] minus 119870(119894119895)
119896119896minus1119867
(119895)119879
119896
minus 119871(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1
(21)
Now using (2) for 119910(119895)119896 (A7) for 119909(119894)
119896119896minus1 and the OPL we
obtain
119864 [119909(119894)
119896119896minus1119910(119895)119879
119896] = 119870
(119894)
119896119896minus1119867
(119895)119879
119896+X(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1 (22)
From the above relations the expression for 119871(119894119895)119896
is immedi-ately derived
Using again (A7) for 119909(119894)119896119896minus1
expression for 119871(119894119895)119896119896minus1
is alsoimmediately clear and the proof is completed
Lemma 7 For 119894 119895 = 1 2 119898 and 119894 = 119895 the innovationcross-covariance matrix Π(119894119895)
119896= 119864[120583
(119894)
119896120583(119895)119879
119896] satisfies
Π(119894119895)
119896= 119867
(119894)
119896(X(119895)
119896minus 119871(119894119895)
119896) +M
(119895119894)119879
119896119867
(119895)119879
119896+ 119877(119894119895)
119896
minusV(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119895119894)119879
119896119896minus1 119896 ge 2
Π(119894119895)
1= 119867
(119894)
1(X(119895)
1minus 119871(119894119895)
1) +M
(119895119894)119879
1119867
(119895)119879
1+ 119877(119894119895)
1
(23)
whereM(119894119895)119896= 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119895)119879119896] is given by
M(119894119895)
119896= 119865119896minus1119878(119895)
119896minus2119896+ 119878(119895)
119896minus1119896minusX(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119895119894)119879
119896119896minus1
119896 ge 2
M(119894119895)
1= 119878(119895)
01
(24)
and Π(119894119895)119896119896minus1
= 119864[120583(119894)
119896120583(119895)119879
119896minus1] is obtained by
Π(119894119895)
119896119896minus1= 119867
(119894)
119896(X(119895)
119896119896minus1minus 119871(119894119895)
119896119896minus1) +V
(119894119895)
119896119896minus1
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1Π(119894119895)
119896minus1 119896 ge 2
(25)
Proof Using (16) for the innovation 120583(119894)119896 it is clear that
Π(119894119895)
119896= 119864 [119910
(119894)
119896120583(119895)119879
119896] minus 119867
(119894)
119896119871(119894119895)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1119864 [120583(119894)
119896minus1120583(119895)119879
119896]
(26)
Similar reasoning to that used to obtain (17) yields
119864 [119910(119894)
119896120583(119895)119879
119896] = 119867
(119894)
119896X(119895)
119896+M(119895119894)119879
119896119867
(119895)119879
119896+ 119877(119894119895)
119896
minusV(119894119895)
119896119896minus1Π(119895)minus1
119896minus1V(119895)119879
119896119896minus1 119896 ge 2
119864 [119910(119894)
1120583(119895)119879
1] = 119867
(119894)
1X(119894)
1+M(119895119894)119879
1119867
(119895)119879
1+ 119877(119894119895)
1
(27)
So the expression for Π(119894119895)119896
is immediately derived Theexpression forΠ(119894119895)
119896119896minus1is obtained by analogous reasoning
42 Distributed Fusion Filter Design Aswe have already indi-cated our goal is to obtain a distributed fusionfilter119909(119863)
119896119896 gen-
erated by aweighted sumof the local estimatorssum119898119894=1119865(119894)
119896119909(119894)
119896119896
in which the weight matrices 119865(119894)119896 119894 = 1 2 119898 are com-
puted to minimize the mean squared estimation errorSo by denoting 119883
119896119896= (119909(1)119879
119896119896 119909
(119898)119879
119896119896)119879 and F
119896=
(119865(1)
119896 119865
(119898)
119896) the aim is to findF
119896such that the estimator
F119896119883119896119896
minimizes
119864 [(119909119896minusF119896119883119896119896) (119909119896minusF119896119883119896119896)
119879
] (28)
6 Discrete Dynamics in Nature and Society
As it is well known the solution of this problem is given bythe matrix
Fopt119896= 119864 [119909
119896119883119879
119896119896] (119864 [119883
119896119896119883119879
119896119896])
minus1
119896 ge 1 (29)
The following theorem provides the proposed distributedfusion filtering estimators 119909(119863)
119896119896 and their error covariance
matrices Σ(119863)119896119896
Theorem 8 Let 119883119896119896
= (119909(1)119879
119896119896 119909
(119898)119879
119896119896)119879 be the vector
formed by the local LS filtering estimators calculated inTheorem 4 Then the distributed fusion filter is given by
119909(119863)
119896119896= Ξ119896119896119870minus1
119896119896119883119896119896 119896 ge 1 (30)
where
119870119896119896= (119870(119894119895)
119896119896)119894119895=1119898
Ξ119896119896= (119870(1)
119896119896 119870
(119898)
119896119896)
(31)
and 119870(119894119895)119896119896= 119864[119909
(119894)
119896119896119909(119895)119879
119896119896] 119894 119895 = 1 2 119898 are computed by
119870(119894119895)
119896119896= 119870(119894119895)
119896119896minus1+ 119871(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896+X(119894)
119896Π(119894)minus1
119896119871(119895119894)119879
119896
+X(119894)
119896Π(119894)minus1
119896Π(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896
119896 ge 1 119894 = 119895
119870(119894)
119896119896= D119896minus Σ(119894)
119896119896 119896 ge 1
(32)
with 119870(119894119895)119896119896minus1
119871(119894119895)119896 and Π(119894119895)
119896given in Lemmas 5 6 and 7
respectivelyThe error covariance matrices of the distributed fusion
filtering estimators are computed by
Σ(119863)
119896119896= D119896minus Ξ119896119896119870minus1
119896119896Ξ119879
119896119896 119896 ge 1 (33)
Proof Expressions (30) and (33) for the distributed estima-tors and their error covariance matrices respectively areimmediately derived from (29) Expression (32) for the cross-covariancematrices between local filtering estimators followseasily using expression (8) of such estimators
5 Numerical Simulation Example
Consider the following discrete-time linear networked sys-tem with state-dependent multiplicative noise and scalarmeasurements from four sensors
119909119896= (095 + 02120598
119896minus1) 119909119896minus1+ 119908119896minus1 119896 ge 1
119910(119894)
119896= 119867(119894)
119896119909119896+ V(119894)119896 119896 ge 1 119894 = 1 2 3 4
(34)
where 120598119896 119896 ge 0 is a zero-meanGaussianwhite process with
unit varianceThe additive noises are defined as119908119896= 06(120578
119896+
120578119896+1) and V(119894)
119896= 119888(119894)
119896(120578119896minus1
+ 120578119896) 119894 = 1 2 3 4 where 119888(1)
119896= 1
119888(2)
119896= 05 119888(3)
119896= 075 and 119888(4)
119896= 085 and 120578
119896 119896 ge 0 is a
zero-mean Gaussian white process with variance 05
For 119894 = 1 2 3 4 the random parameter matrices119867(119894)119896
aredefined as follows
(i) 119867(1)119896
= 082120582(1)
119896 where 120582(1)
119896 119896 ge 1 is a sequence
of independent and identically distributed (iid) ran-dom variables uniformly distributed over [03 07]
(ii) 119867(2)119896= 075120582
(2)
119896 where 120582(2)
119896 119896 ge 1 is a sequence of
iid discrete randomvariables with119875[120582(2)119896= 0] = 01
119875[120582(2)
119896= 05] = 05 and 119875[120582(2)
119896= 1] = 04
(iii) 119867(3)119896
= 074120582(3)
119896 where 120582(3)
119896 119896 ge 1 is a Bernoulli
process with 119875[120582(3)119896= 1] = 119901
(3) forall119896
(iv) 119867(4)119896= 120582(4)
119896(075 + 095120585
119896) where 120582(4)
119896 119896 ge 1 is a
Bernoulli process with 119875[120582(4)119896= 1] = 119901
(4) forall119896 and120585119896 119896 ge 0 is a zero-mean Gaussian white process
with unit varianceNote that the random parameter matrices at each sensor
119867(119894)
119896 allow modeling different types of uncertainty Namely
in sensors 1 and 2 as in [13] the scalar random variables 120582(119894)119896
take values over the interval [0 1] and represent continuousand discrete stochastic sensor gain degradation respectivelyIn sensor 3120582(3)
119896are Bernoulli randomvariables thus covering
the phenomenon of missing measurements with 120582(3)119896= 1
meaning that the signal 119909119896is present in the measurement 119910(3)
119896
coming from the third sensor at time 119896 while 120582(119894)119896= 0means
that the signal is missing in the measured data at time 119896 orequivalently that such observation is only noise V(3)
119896 Finally
as in [5] bothmissingmeasurements andmultiplicative noiseare considered in sensor 4
To illustrate the feasibility and effectiveness of the pro-posed algorithms they were implemented in MATLAB andone hundred iterations of the algorithms were run Usingsimulated values both centralized and distributed filteringestimates were calculated as well as the corresponding errorvariances in order to measure the estimation accuracy
The error variances of the local centralized and dis-tributed fusion filters are compared considering fixed values119901(3)
= 05 119901(4) = 075 In Figure 1 we can see that theerror variances of the distributed fusion filter are significantlysmaller than those of every local filter but lightly greaterthan those of the centralized filter Nevertheless althoughthe centralized fusion filter outperforms the distributed onethis difference is slight and both filters perform similarly andprovide good estimations Besides this slight difference iscompensated by the fact that the distributed fusion structurereduces the computational cost and has the advantage ofbetter robustness and fault tolerance For example assumingthat the fourth sensor is faulty and themeasurement equationis given by 119910(4)
119896= 119867(4)
119896119909119896+ V(4)119896+ 119886119896 where 119886
119896= 05119896 for
50 le 119896 le 70 and 119886119896= 0 otherwise Figure 2 displays the
corresponding filtering mean square errors of one thousandindependent simulations at each sampling time 119896 showingthat the distributed fusion method has better fault-toleranceabilities than the centralized one
Next we analyze the centralized and distributed filteringaccuracy in function of the probabilities 119901(3) and 119901(4) of
Discrete Dynamics in Nature and Society 7
Centralized filtering error variancesDistributed filtering error variancesLocal filtering error variances (sensor 1)Local filtering error variances (sensor 2)Local filtering error variances (sensor 3)Local filtering error variances (sensor 4)
10 20 30 40 50 60 70 80 90 1000Iteration k
0
05
1
15
2
25
3
35
Filte
ring
erro
r var
ianc
es
Figure 1 Error variance comparison of the centralized distributedand local filtering estimators
MSE centralized filterMSE distributed filter
10 20 30 40 50 60 70 80 90 1000Iteration k
0
1
2
3
4
5
6
7
8
Mea
n sq
uare
erro
rs
Figure 2 Centralized and distributed filtering mean square errors
the Bernoulli variables that model uncertainties of the obser-vations coming from sensors 3 and 4 respectively Specifi-cally the filter performances are analyzed when 119901(3) is variedfrom 01 to 09 and different values of 119901(4) are consideredSince the behavior of the error variances is analogous in allthe iterations only the results of a specific iteration (119896 = 100)
Distributed error variances
Centralized error variances
05
055
06
065
07
075
08
Filte
ring
erro
r var
ianc
es
p(4) = 03
p(4) = 05
p(4) = 07
p(4) = 09
050302 0604 0807 0901Probability p(3)
Figure 3 Centralized and distributed filtering error variances at 119896 =100 versus 119901(3) when 119901(4) = 03 05 07 and 09
are shown here In Figure 3 the centralized and distributedfiltering error variances are displayed versus 119901(3) for 119901(4) =03 05 07 and 09 As expected from this figure it isconcluded that as 119901(3) or 119901(4) increase the centralized anddistributed error variances both become smaller and hencethe performance of the centralized and distributed filtersimproves as these probabilities increase
Finally to evaluate the performance of the proposed fil-ters in comparisonwith other filters reported in the literaturethe filtering mean square error (MSE) at each sampling time119896 is calculated To compute the MSE one thousand indepen-dent simulations were considered and one hundred iterationsof each algorithm were performed considering the values119901(3)
= 05119901(4) = 075 A comparative analysis was carried outbetween the proposed centralized and distributed filters andthe following filters
(i) The centralized Kalman filter for systems with inde-pendent additive noises
(ii) The centralized filter for multisensor systems withmultiplicative noises in the state and observationequations missing measurements and noise correla-tion at the same sampling time [5]
(iii) The centralized filter for networked systems withmultiplicative noise in the state equation stochasticsensor gain degradation and independent additivenoises [13]
The results of these comparisons are displayed in Figure 4which shows that the proposed centralized and distributedfilters perform better than the other three centralized filtersTheKalmanfilter provides theworst estimations since neithermultiplicative noises nor missing measurements are taken
8 Discrete Dynamics in Nature and Society
Centralized Kalman filter Filter in [13]Filter in [5]Proposed centralized filter
Proposed distributed filter
0
05
1
15
2
25
3
35
4
45
Mea
n sq
uare
erro
rs
10 20 30 40 50 60 70 80 90 1000Iteration k
Figure 4 Mean square errors when 119901(3) = 05 119901(4) = 075
into accountThe performance of the filter in [5] is better thanthat of the filter in [13] since the latter ignores any correlationassumption and multiplicative observation noise in sensor 4is not taken into account
6 Conclusion
Thedistributed fusion filtering problemhas been investigatedfor multisensor stochastic systems with random parametermatrices and correlated noises The main outcomes andresults can be summarized as follows
(i) Recursive algorithms for the local LS linear filters ofthe system state based on the measured output datacoming from each sensor have been designed by aninnovation approach The computational procedureof these local filtering algorithms is very simple andsuitable for online applications
(ii) Once the local filters have been obtained a distributedfusion filter has been designed as thematrix-weightedsum of such local estimators which minimizes themean squared estimation error The error covariancematrices of such distributed fusion filter have beenalso derived
(iii) A numerical simulation example has illustrated theusefulness of the proposed results Error variancecomparison has shown that both the centralized andthe distributed filters outperform the local ones thisexample has also shown that the slight superiorityof the centralized filter over the distributed filter iscompensated by better robustness and fault-toleranceabilities of the latter This example has also high-lighted the applicability of the proposed algorithmfor a great variety of multisensor systems featuring
network-induced stochastic uncertainties such assensor gain degradation missing measurements ormultiplicative observation noises which can be dealtwith in the observation model considered in thispaper
A challenging further research topic is to address the esti-mation problem for this kind of system with random param-eter matrices considering a sensor network whose nodes aredistributed according to a given topology characterized by adirected graph Also an interesting future research topic is toconsider other kinds of stochastic uncertainties which oftenappear in networked systems such as random delays andpacket dropouts
Appendix
Proof of Theorem 4
This appendix provides the proof of Theorem 4 by aninnovation approach For the 119894th sensor the innovation attime 119896 is defined as 120583(119894)
119896= 119910(119894)
119896minus 119910(119894)
119896119896minus1 where 119910(119894)
119896119896minus1is
the LS linear estimator of 119910(119894)119896
based on measurements 119910(119894)119904
119904 le 119896minus1 Replacing the observation process by the innovationone the LS linear estimator (119894)
119896119871 of a random vector 119911
119896based
on the observations 119910(119894)1 119910
(119894)
119871 can be calculated as linear
combination of the innovations 120583(119894)1 120583
(119894)
119871 namely
(119894)
119896119871=
119871
sum
119904=1
119864 [119911119896120583(119894)119879
119904] (119864 [120583
(119894)
119904120583(119894)119879
119904])
minus1
120583(119894)
119904 119896 ge 1 (A1)
From system equations (1)-(2) and the OPL the statepredictor 119909(119894)
119896119896minus1 and the observation predictor 119910(119894)
119896119896minus1 verify
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+ 119908(119894)
119896minus1119896minus1 119896 ge 1 (A2)
119910(119894)
119896119896minus1= 119867
(119894)
119896119909(119894)
119896119896minus1+ V(119894)119896119896minus1
119896 ge 1 (A3)
Because of the correlation assumption (iii) the noise filter119908(119894)
119896119896and the one-stage noise predictor V(119894)
119896119896minus1are not equal
to zero and hence expressions for such estimators must becalculated
LS Linear Noise Estimators 119908(119894)119896119896
and V(119894)119896119896minus1
From the generalexpression for estimators (A1) taking into account the factthat by Remark 3
119864 [119908119896120583(119894)119879
119896] = 119864 [119908
119896119910(119894)119879
119896] =W
(119894)
119896
119864 [V(119894)119896120583(119894)119879
119896minus1] = 119864 [V(119894)
119896119910(119894)119879
119896minus1] =V
(119894)
119896119896minus1
(A4)
we have that the noise filter 119908(119894)119896119896
and the one-stage noisepredictor V(119894)
119896119896minus1 satisfy
119908(119894)
119896119896=W(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119908
(119894)
00= 0 (A5)
V(119894)119896119896minus1
=V(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 V(119894)
10= 0 (A6)
Discrete Dynamics in Nature and Society 9
Now we will prove the local filtering algorithm by severalsteps
(I) Derivation of the Filter (8) One-Stage State Predictor (9)andTheir Error CovarianceMatrices (10) and (11) RespectivelyFrom (A1) by denoting X
(119894)
119896= 119864[119909
119896120583(119894)119879
119896] and Π(119894)
119896=
119864[120583(119894)
119896120583(119894)119879
119896] expression (8) for the filter is obvious and from
this relation and theOPL we obtain (10) for the filtering errorcovariance
From (A2) and (A5) expression (9) withW(119894)119896satisfying
(6) for the state predictor is immediately obtained Thisexpression together with state equation (1) leads to (11) for theprediction error covariance matrix whereD
119896is given by (5)
andJ(119894)
119896= 119864[(119909
119896minus 119909(119894)
119896119896)119908119879
119896] clearly satisfies (12)
(II) Derivation of (13) for the Matrix X(119894)119896= 119864[119909
119896120583(119894)119879
119896] From
(8) and (9) the following recursive expression for the statepredictor is obtained
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus2+X(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 (A7)
where from (1) thematrixX(119894)119896119896minus1
= 119864[119909119896120583(119894)119879
119896minus1] clearly verifies
(15)Using relation (A7) and again (1) we obtain that the
correlation between the prediction error and the noiseM(119894)
119896equiv 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119894)119879119896] satisfies (14) This correlation
property allows us to obtain easily expression (13) for thematrixX(119894)
119896= 119864[119909
119896120583(119894)119879
119896] Indeed by the OPL we haveX(119894)
119896=
119864[(119909119896minus119909(119894)
119896119896minus1)119910(119894)119879
119896] and from (2) expression (13) forX(119894)
119896is
obtained
(III) Derivation of Innovation (16) and Its Covariance Matrix(17) From (A3) and (A6) it is clear that the innovation isgiven by (16) withV(119894)
119896119896minus1satisfying (7) Next expression (17)
for Π(119894)119896= 119864[120583
(119894)
119896120583(119894)119879
119896] is derived From the OPL and (2) we
have that
Π(119894)
119896= 119864 [119910
(119894)
119896120583(119894)119879
119896]
= 119867
(119894)
119896119864 [119909119896120583(119894)119879
119896] + 119864 [
(119894)
119896119909119896120583(119894)119879
119896]
+ 119864 [V(119894)119896120583(119894)119879
119896]
(A8)
(i) Again from the OPL and (2) and the conditionalexpectation properties
119864 [(119894)
119896119909119896120583(119894)119879
119896] = 119864 [
(119894)
119896119909119896119909119879
119896(119894)119879
119896]
= 119864 [(119894)
119896D119896(119894)119879
119896] 119896 ge 1
(A9)
(ii) Using (16) for 120583(119894)119896 with (2) for 119910(119894)
119896 we obtain that
119864 [V(119894)119896120583(119894)119879
119896] =M
(119894)119879
119896119867
(119894)119879
119896+ 119877(119894)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
119864 [V(119894)1120583(119894)119879
1] =M
(119894)119879
1119867
(119894)119879
1+ 119877(119894)
1
(A10)
Substituting the above expectations into (A8) we easilyobtain (17) and the proof is completed
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This research is supported by Ministerio de Economıa yCompetitividad (Grant no MTM2014-52291-P and FPU pro-gramme)
References
[1] S-L Sun ldquoMulti-sensor optimal information fusion Kalmanfilters with applicationsrdquo Aerospace Science and Technology vol8 no 1 pp 57ndash62 2004
[2] X Sun and G Yan ldquoDistributed state fusion Kalman predictorbased onWLS algorithmrdquoProcedia Engineering vol 29 pp 216ndash222 2012
[3] C Ran andZDeng ldquoSelf-tuningweightedmeasurement fusionKalman filtering algorithmrdquo Computational Statistics amp DataAnalysis vol 56 no 6 pp 2112ndash2128 2012
[4] Y Song G Wei and G Yang ldquoDistributed 119867infin
filtering for aclass of sensor networks with uncertain rates of packet lossesrdquoSignal Processing vol 104 pp 143ndash151 2014
[5] J Ma and S Sun ldquoCentralized fusion estimators for multi-sensor systems withmultiplicative noises andmissingmeasure-mentsrdquo Journal of Networks vol 7 no 10 pp 1538ndash1545 2012
[6] L Li and Y Xia ldquoUnscented kalman filter over unreliable com-munication networks with markovian packet dropoutsrdquo IEEETransactions on Automatic Control vol 58 no 12 pp 3224ndash3230 2013
[7] X He Z Wang X Wang and D H Zhou ldquoNetworked strongtracking filteringwithmultiple packet dropouts algorithms andapplicationsrdquo IEEE Transactions on Industrial Electronics vol61 no 3 pp 1454ndash1463 2014
[8] S Wang H Fang and X Tian ldquoRecursive estimation for non-linear stochastic systems with multi-step transmission delaysmultiple packet dropouts and correlated noisesrdquo Signal Process-ing vol 115 pp 164ndash175 2015
[9] D Chen Y Yu L Xu and X Liu ldquoKalman filtering for discretestochastic systems with multiplicative noises and random two-step sensor delaysrdquoDiscreteDynamics inNature and Society vol2015 Article ID 809734 11 pages 2015
[10] X Shen Y Luo Y Zhu and E Song ldquoGlobally optimaldistributed Kalman filtering fusionrdquo Science China InformationSciences vol 55 no 3 pp 512ndash529 2012
[11] J Feng Z Wang and M Zeng ldquoDistributed weighted robustKalman filter fusion for uncertain systems with autocorrelatedand cross-correlated noisesrdquo Information Fusion vol 14 no 1pp 78ndash86 2013
[12] C Sanchez-Gonzalez and T M Garcıa-Munoz ldquoRecursivelinear estimation for discrete-time systems in the presence ofdifferent multiplicative observation noisesrdquo Discrete Dynamicsin Nature and Society vol 2010 Article ID 875023 12 pages2010
[13] Y Liu X He Z Wang and D Zhou ldquoOptimal filtering fornetworked systems with stochastic sensor gain degradationrdquoAutomatica vol 50 no 5 pp 1521ndash1525 2014
10 Discrete Dynamics in Nature and Society
[14] Y Luo Y Zhu D Luo J Zhou E Song and DWang ldquoGloballyoptimal multisensor distributed random parameter matricesKalman filtering fusion with applicationsrdquo Sensors vol 8 no12 pp 8086ndash8103 2008
[15] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[16] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoCovariance-based estimation from multisensor delayed mea-surements with random parameter matrices and correlatednoisesrdquoMathematical Problems in Engineering vol 2014 ArticleID 958474 13 pages 2014
[17] J Linares-Perez R Caballero-Aguila and I Garcıa-GarridoldquoOptimal linear filter design for systems with correlation inthe measurement matrices and noises recursive algorithm andapplicationsrdquo International Journal of Systems Science vol 45no 7 pp 1548ndash1562 2014
[18] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoOptimal state estimation for networked systems with randomparameter matrices correlated noises and delayed measure-mentsrdquo International Journal of General Systems vol 44 no 2pp 142ndash154 2015
[19] J Feng and M Zeng ldquoOptimal distributed Kalman filteringfusion for a linear dynamic systemwith cross-correlated noisesrdquoInternational Journal of Systems Science vol 43 no 2 pp 385ndash398 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Discrete Dynamics in Nature and Society
As it is well known the solution of this problem is given bythe matrix
Fopt119896= 119864 [119909
119896119883119879
119896119896] (119864 [119883
119896119896119883119879
119896119896])
minus1
119896 ge 1 (29)
The following theorem provides the proposed distributedfusion filtering estimators 119909(119863)
119896119896 and their error covariance
matrices Σ(119863)119896119896
Theorem 8 Let 119883119896119896
= (119909(1)119879
119896119896 119909
(119898)119879
119896119896)119879 be the vector
formed by the local LS filtering estimators calculated inTheorem 4 Then the distributed fusion filter is given by
119909(119863)
119896119896= Ξ119896119896119870minus1
119896119896119883119896119896 119896 ge 1 (30)
where
119870119896119896= (119870(119894119895)
119896119896)119894119895=1119898
Ξ119896119896= (119870(1)
119896119896 119870
(119898)
119896119896)
(31)
and 119870(119894119895)119896119896= 119864[119909
(119894)
119896119896119909(119895)119879
119896119896] 119894 119895 = 1 2 119898 are computed by
119870(119894119895)
119896119896= 119870(119894119895)
119896119896minus1+ 119871(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896+X(119894)
119896Π(119894)minus1
119896119871(119895119894)119879
119896
+X(119894)
119896Π(119894)minus1
119896Π(119894119895)
119896Π(119895)minus1
119896X(119895)119879
119896
119896 ge 1 119894 = 119895
119870(119894)
119896119896= D119896minus Σ(119894)
119896119896 119896 ge 1
(32)
with 119870(119894119895)119896119896minus1
119871(119894119895)119896 and Π(119894119895)
119896given in Lemmas 5 6 and 7
respectivelyThe error covariance matrices of the distributed fusion
filtering estimators are computed by
Σ(119863)
119896119896= D119896minus Ξ119896119896119870minus1
119896119896Ξ119879
119896119896 119896 ge 1 (33)
Proof Expressions (30) and (33) for the distributed estima-tors and their error covariance matrices respectively areimmediately derived from (29) Expression (32) for the cross-covariancematrices between local filtering estimators followseasily using expression (8) of such estimators
5 Numerical Simulation Example
Consider the following discrete-time linear networked sys-tem with state-dependent multiplicative noise and scalarmeasurements from four sensors
119909119896= (095 + 02120598
119896minus1) 119909119896minus1+ 119908119896minus1 119896 ge 1
119910(119894)
119896= 119867(119894)
119896119909119896+ V(119894)119896 119896 ge 1 119894 = 1 2 3 4
(34)
where 120598119896 119896 ge 0 is a zero-meanGaussianwhite process with
unit varianceThe additive noises are defined as119908119896= 06(120578
119896+
120578119896+1) and V(119894)
119896= 119888(119894)
119896(120578119896minus1
+ 120578119896) 119894 = 1 2 3 4 where 119888(1)
119896= 1
119888(2)
119896= 05 119888(3)
119896= 075 and 119888(4)
119896= 085 and 120578
119896 119896 ge 0 is a
zero-mean Gaussian white process with variance 05
For 119894 = 1 2 3 4 the random parameter matrices119867(119894)119896
aredefined as follows
(i) 119867(1)119896
= 082120582(1)
119896 where 120582(1)
119896 119896 ge 1 is a sequence
of independent and identically distributed (iid) ran-dom variables uniformly distributed over [03 07]
(ii) 119867(2)119896= 075120582
(2)
119896 where 120582(2)
119896 119896 ge 1 is a sequence of
iid discrete randomvariables with119875[120582(2)119896= 0] = 01
119875[120582(2)
119896= 05] = 05 and 119875[120582(2)
119896= 1] = 04
(iii) 119867(3)119896
= 074120582(3)
119896 where 120582(3)
119896 119896 ge 1 is a Bernoulli
process with 119875[120582(3)119896= 1] = 119901
(3) forall119896
(iv) 119867(4)119896= 120582(4)
119896(075 + 095120585
119896) where 120582(4)
119896 119896 ge 1 is a
Bernoulli process with 119875[120582(4)119896= 1] = 119901
(4) forall119896 and120585119896 119896 ge 0 is a zero-mean Gaussian white process
with unit varianceNote that the random parameter matrices at each sensor
119867(119894)
119896 allow modeling different types of uncertainty Namely
in sensors 1 and 2 as in [13] the scalar random variables 120582(119894)119896
take values over the interval [0 1] and represent continuousand discrete stochastic sensor gain degradation respectivelyIn sensor 3120582(3)
119896are Bernoulli randomvariables thus covering
the phenomenon of missing measurements with 120582(3)119896= 1
meaning that the signal 119909119896is present in the measurement 119910(3)
119896
coming from the third sensor at time 119896 while 120582(119894)119896= 0means
that the signal is missing in the measured data at time 119896 orequivalently that such observation is only noise V(3)
119896 Finally
as in [5] bothmissingmeasurements andmultiplicative noiseare considered in sensor 4
To illustrate the feasibility and effectiveness of the pro-posed algorithms they were implemented in MATLAB andone hundred iterations of the algorithms were run Usingsimulated values both centralized and distributed filteringestimates were calculated as well as the corresponding errorvariances in order to measure the estimation accuracy
The error variances of the local centralized and dis-tributed fusion filters are compared considering fixed values119901(3)
= 05 119901(4) = 075 In Figure 1 we can see that theerror variances of the distributed fusion filter are significantlysmaller than those of every local filter but lightly greaterthan those of the centralized filter Nevertheless althoughthe centralized fusion filter outperforms the distributed onethis difference is slight and both filters perform similarly andprovide good estimations Besides this slight difference iscompensated by the fact that the distributed fusion structurereduces the computational cost and has the advantage ofbetter robustness and fault tolerance For example assumingthat the fourth sensor is faulty and themeasurement equationis given by 119910(4)
119896= 119867(4)
119896119909119896+ V(4)119896+ 119886119896 where 119886
119896= 05119896 for
50 le 119896 le 70 and 119886119896= 0 otherwise Figure 2 displays the
corresponding filtering mean square errors of one thousandindependent simulations at each sampling time 119896 showingthat the distributed fusion method has better fault-toleranceabilities than the centralized one
Next we analyze the centralized and distributed filteringaccuracy in function of the probabilities 119901(3) and 119901(4) of
Discrete Dynamics in Nature and Society 7
Centralized filtering error variancesDistributed filtering error variancesLocal filtering error variances (sensor 1)Local filtering error variances (sensor 2)Local filtering error variances (sensor 3)Local filtering error variances (sensor 4)
10 20 30 40 50 60 70 80 90 1000Iteration k
0
05
1
15
2
25
3
35
Filte
ring
erro
r var
ianc
es
Figure 1 Error variance comparison of the centralized distributedand local filtering estimators
MSE centralized filterMSE distributed filter
10 20 30 40 50 60 70 80 90 1000Iteration k
0
1
2
3
4
5
6
7
8
Mea
n sq
uare
erro
rs
Figure 2 Centralized and distributed filtering mean square errors
the Bernoulli variables that model uncertainties of the obser-vations coming from sensors 3 and 4 respectively Specifi-cally the filter performances are analyzed when 119901(3) is variedfrom 01 to 09 and different values of 119901(4) are consideredSince the behavior of the error variances is analogous in allthe iterations only the results of a specific iteration (119896 = 100)
Distributed error variances
Centralized error variances
05
055
06
065
07
075
08
Filte
ring
erro
r var
ianc
es
p(4) = 03
p(4) = 05
p(4) = 07
p(4) = 09
050302 0604 0807 0901Probability p(3)
Figure 3 Centralized and distributed filtering error variances at 119896 =100 versus 119901(3) when 119901(4) = 03 05 07 and 09
are shown here In Figure 3 the centralized and distributedfiltering error variances are displayed versus 119901(3) for 119901(4) =03 05 07 and 09 As expected from this figure it isconcluded that as 119901(3) or 119901(4) increase the centralized anddistributed error variances both become smaller and hencethe performance of the centralized and distributed filtersimproves as these probabilities increase
Finally to evaluate the performance of the proposed fil-ters in comparisonwith other filters reported in the literaturethe filtering mean square error (MSE) at each sampling time119896 is calculated To compute the MSE one thousand indepen-dent simulations were considered and one hundred iterationsof each algorithm were performed considering the values119901(3)
= 05119901(4) = 075 A comparative analysis was carried outbetween the proposed centralized and distributed filters andthe following filters
(i) The centralized Kalman filter for systems with inde-pendent additive noises
(ii) The centralized filter for multisensor systems withmultiplicative noises in the state and observationequations missing measurements and noise correla-tion at the same sampling time [5]
(iii) The centralized filter for networked systems withmultiplicative noise in the state equation stochasticsensor gain degradation and independent additivenoises [13]
The results of these comparisons are displayed in Figure 4which shows that the proposed centralized and distributedfilters perform better than the other three centralized filtersTheKalmanfilter provides theworst estimations since neithermultiplicative noises nor missing measurements are taken
8 Discrete Dynamics in Nature and Society
Centralized Kalman filter Filter in [13]Filter in [5]Proposed centralized filter
Proposed distributed filter
0
05
1
15
2
25
3
35
4
45
Mea
n sq
uare
erro
rs
10 20 30 40 50 60 70 80 90 1000Iteration k
Figure 4 Mean square errors when 119901(3) = 05 119901(4) = 075
into accountThe performance of the filter in [5] is better thanthat of the filter in [13] since the latter ignores any correlationassumption and multiplicative observation noise in sensor 4is not taken into account
6 Conclusion
Thedistributed fusion filtering problemhas been investigatedfor multisensor stochastic systems with random parametermatrices and correlated noises The main outcomes andresults can be summarized as follows
(i) Recursive algorithms for the local LS linear filters ofthe system state based on the measured output datacoming from each sensor have been designed by aninnovation approach The computational procedureof these local filtering algorithms is very simple andsuitable for online applications
(ii) Once the local filters have been obtained a distributedfusion filter has been designed as thematrix-weightedsum of such local estimators which minimizes themean squared estimation error The error covariancematrices of such distributed fusion filter have beenalso derived
(iii) A numerical simulation example has illustrated theusefulness of the proposed results Error variancecomparison has shown that both the centralized andthe distributed filters outperform the local ones thisexample has also shown that the slight superiorityof the centralized filter over the distributed filter iscompensated by better robustness and fault-toleranceabilities of the latter This example has also high-lighted the applicability of the proposed algorithmfor a great variety of multisensor systems featuring
network-induced stochastic uncertainties such assensor gain degradation missing measurements ormultiplicative observation noises which can be dealtwith in the observation model considered in thispaper
A challenging further research topic is to address the esti-mation problem for this kind of system with random param-eter matrices considering a sensor network whose nodes aredistributed according to a given topology characterized by adirected graph Also an interesting future research topic is toconsider other kinds of stochastic uncertainties which oftenappear in networked systems such as random delays andpacket dropouts
Appendix
Proof of Theorem 4
This appendix provides the proof of Theorem 4 by aninnovation approach For the 119894th sensor the innovation attime 119896 is defined as 120583(119894)
119896= 119910(119894)
119896minus 119910(119894)
119896119896minus1 where 119910(119894)
119896119896minus1is
the LS linear estimator of 119910(119894)119896
based on measurements 119910(119894)119904
119904 le 119896minus1 Replacing the observation process by the innovationone the LS linear estimator (119894)
119896119871 of a random vector 119911
119896based
on the observations 119910(119894)1 119910
(119894)
119871 can be calculated as linear
combination of the innovations 120583(119894)1 120583
(119894)
119871 namely
(119894)
119896119871=
119871
sum
119904=1
119864 [119911119896120583(119894)119879
119904] (119864 [120583
(119894)
119904120583(119894)119879
119904])
minus1
120583(119894)
119904 119896 ge 1 (A1)
From system equations (1)-(2) and the OPL the statepredictor 119909(119894)
119896119896minus1 and the observation predictor 119910(119894)
119896119896minus1 verify
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+ 119908(119894)
119896minus1119896minus1 119896 ge 1 (A2)
119910(119894)
119896119896minus1= 119867
(119894)
119896119909(119894)
119896119896minus1+ V(119894)119896119896minus1
119896 ge 1 (A3)
Because of the correlation assumption (iii) the noise filter119908(119894)
119896119896and the one-stage noise predictor V(119894)
119896119896minus1are not equal
to zero and hence expressions for such estimators must becalculated
LS Linear Noise Estimators 119908(119894)119896119896
and V(119894)119896119896minus1
From the generalexpression for estimators (A1) taking into account the factthat by Remark 3
119864 [119908119896120583(119894)119879
119896] = 119864 [119908
119896119910(119894)119879
119896] =W
(119894)
119896
119864 [V(119894)119896120583(119894)119879
119896minus1] = 119864 [V(119894)
119896119910(119894)119879
119896minus1] =V
(119894)
119896119896minus1
(A4)
we have that the noise filter 119908(119894)119896119896
and the one-stage noisepredictor V(119894)
119896119896minus1 satisfy
119908(119894)
119896119896=W(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119908
(119894)
00= 0 (A5)
V(119894)119896119896minus1
=V(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 V(119894)
10= 0 (A6)
Discrete Dynamics in Nature and Society 9
Now we will prove the local filtering algorithm by severalsteps
(I) Derivation of the Filter (8) One-Stage State Predictor (9)andTheir Error CovarianceMatrices (10) and (11) RespectivelyFrom (A1) by denoting X
(119894)
119896= 119864[119909
119896120583(119894)119879
119896] and Π(119894)
119896=
119864[120583(119894)
119896120583(119894)119879
119896] expression (8) for the filter is obvious and from
this relation and theOPL we obtain (10) for the filtering errorcovariance
From (A2) and (A5) expression (9) withW(119894)119896satisfying
(6) for the state predictor is immediately obtained Thisexpression together with state equation (1) leads to (11) for theprediction error covariance matrix whereD
119896is given by (5)
andJ(119894)
119896= 119864[(119909
119896minus 119909(119894)
119896119896)119908119879
119896] clearly satisfies (12)
(II) Derivation of (13) for the Matrix X(119894)119896= 119864[119909
119896120583(119894)119879
119896] From
(8) and (9) the following recursive expression for the statepredictor is obtained
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus2+X(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 (A7)
where from (1) thematrixX(119894)119896119896minus1
= 119864[119909119896120583(119894)119879
119896minus1] clearly verifies
(15)Using relation (A7) and again (1) we obtain that the
correlation between the prediction error and the noiseM(119894)
119896equiv 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119894)119879119896] satisfies (14) This correlation
property allows us to obtain easily expression (13) for thematrixX(119894)
119896= 119864[119909
119896120583(119894)119879
119896] Indeed by the OPL we haveX(119894)
119896=
119864[(119909119896minus119909(119894)
119896119896minus1)119910(119894)119879
119896] and from (2) expression (13) forX(119894)
119896is
obtained
(III) Derivation of Innovation (16) and Its Covariance Matrix(17) From (A3) and (A6) it is clear that the innovation isgiven by (16) withV(119894)
119896119896minus1satisfying (7) Next expression (17)
for Π(119894)119896= 119864[120583
(119894)
119896120583(119894)119879
119896] is derived From the OPL and (2) we
have that
Π(119894)
119896= 119864 [119910
(119894)
119896120583(119894)119879
119896]
= 119867
(119894)
119896119864 [119909119896120583(119894)119879
119896] + 119864 [
(119894)
119896119909119896120583(119894)119879
119896]
+ 119864 [V(119894)119896120583(119894)119879
119896]
(A8)
(i) Again from the OPL and (2) and the conditionalexpectation properties
119864 [(119894)
119896119909119896120583(119894)119879
119896] = 119864 [
(119894)
119896119909119896119909119879
119896(119894)119879
119896]
= 119864 [(119894)
119896D119896(119894)119879
119896] 119896 ge 1
(A9)
(ii) Using (16) for 120583(119894)119896 with (2) for 119910(119894)
119896 we obtain that
119864 [V(119894)119896120583(119894)119879
119896] =M
(119894)119879
119896119867
(119894)119879
119896+ 119877(119894)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
119864 [V(119894)1120583(119894)119879
1] =M
(119894)119879
1119867
(119894)119879
1+ 119877(119894)
1
(A10)
Substituting the above expectations into (A8) we easilyobtain (17) and the proof is completed
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This research is supported by Ministerio de Economıa yCompetitividad (Grant no MTM2014-52291-P and FPU pro-gramme)
References
[1] S-L Sun ldquoMulti-sensor optimal information fusion Kalmanfilters with applicationsrdquo Aerospace Science and Technology vol8 no 1 pp 57ndash62 2004
[2] X Sun and G Yan ldquoDistributed state fusion Kalman predictorbased onWLS algorithmrdquoProcedia Engineering vol 29 pp 216ndash222 2012
[3] C Ran andZDeng ldquoSelf-tuningweightedmeasurement fusionKalman filtering algorithmrdquo Computational Statistics amp DataAnalysis vol 56 no 6 pp 2112ndash2128 2012
[4] Y Song G Wei and G Yang ldquoDistributed 119867infin
filtering for aclass of sensor networks with uncertain rates of packet lossesrdquoSignal Processing vol 104 pp 143ndash151 2014
[5] J Ma and S Sun ldquoCentralized fusion estimators for multi-sensor systems withmultiplicative noises andmissingmeasure-mentsrdquo Journal of Networks vol 7 no 10 pp 1538ndash1545 2012
[6] L Li and Y Xia ldquoUnscented kalman filter over unreliable com-munication networks with markovian packet dropoutsrdquo IEEETransactions on Automatic Control vol 58 no 12 pp 3224ndash3230 2013
[7] X He Z Wang X Wang and D H Zhou ldquoNetworked strongtracking filteringwithmultiple packet dropouts algorithms andapplicationsrdquo IEEE Transactions on Industrial Electronics vol61 no 3 pp 1454ndash1463 2014
[8] S Wang H Fang and X Tian ldquoRecursive estimation for non-linear stochastic systems with multi-step transmission delaysmultiple packet dropouts and correlated noisesrdquo Signal Process-ing vol 115 pp 164ndash175 2015
[9] D Chen Y Yu L Xu and X Liu ldquoKalman filtering for discretestochastic systems with multiplicative noises and random two-step sensor delaysrdquoDiscreteDynamics inNature and Society vol2015 Article ID 809734 11 pages 2015
[10] X Shen Y Luo Y Zhu and E Song ldquoGlobally optimaldistributed Kalman filtering fusionrdquo Science China InformationSciences vol 55 no 3 pp 512ndash529 2012
[11] J Feng Z Wang and M Zeng ldquoDistributed weighted robustKalman filter fusion for uncertain systems with autocorrelatedand cross-correlated noisesrdquo Information Fusion vol 14 no 1pp 78ndash86 2013
[12] C Sanchez-Gonzalez and T M Garcıa-Munoz ldquoRecursivelinear estimation for discrete-time systems in the presence ofdifferent multiplicative observation noisesrdquo Discrete Dynamicsin Nature and Society vol 2010 Article ID 875023 12 pages2010
[13] Y Liu X He Z Wang and D Zhou ldquoOptimal filtering fornetworked systems with stochastic sensor gain degradationrdquoAutomatica vol 50 no 5 pp 1521ndash1525 2014
10 Discrete Dynamics in Nature and Society
[14] Y Luo Y Zhu D Luo J Zhou E Song and DWang ldquoGloballyoptimal multisensor distributed random parameter matricesKalman filtering fusion with applicationsrdquo Sensors vol 8 no12 pp 8086ndash8103 2008
[15] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[16] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoCovariance-based estimation from multisensor delayed mea-surements with random parameter matrices and correlatednoisesrdquoMathematical Problems in Engineering vol 2014 ArticleID 958474 13 pages 2014
[17] J Linares-Perez R Caballero-Aguila and I Garcıa-GarridoldquoOptimal linear filter design for systems with correlation inthe measurement matrices and noises recursive algorithm andapplicationsrdquo International Journal of Systems Science vol 45no 7 pp 1548ndash1562 2014
[18] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoOptimal state estimation for networked systems with randomparameter matrices correlated noises and delayed measure-mentsrdquo International Journal of General Systems vol 44 no 2pp 142ndash154 2015
[19] J Feng and M Zeng ldquoOptimal distributed Kalman filteringfusion for a linear dynamic systemwith cross-correlated noisesrdquoInternational Journal of Systems Science vol 43 no 2 pp 385ndash398 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 7
Centralized filtering error variancesDistributed filtering error variancesLocal filtering error variances (sensor 1)Local filtering error variances (sensor 2)Local filtering error variances (sensor 3)Local filtering error variances (sensor 4)
10 20 30 40 50 60 70 80 90 1000Iteration k
0
05
1
15
2
25
3
35
Filte
ring
erro
r var
ianc
es
Figure 1 Error variance comparison of the centralized distributedand local filtering estimators
MSE centralized filterMSE distributed filter
10 20 30 40 50 60 70 80 90 1000Iteration k
0
1
2
3
4
5
6
7
8
Mea
n sq
uare
erro
rs
Figure 2 Centralized and distributed filtering mean square errors
the Bernoulli variables that model uncertainties of the obser-vations coming from sensors 3 and 4 respectively Specifi-cally the filter performances are analyzed when 119901(3) is variedfrom 01 to 09 and different values of 119901(4) are consideredSince the behavior of the error variances is analogous in allthe iterations only the results of a specific iteration (119896 = 100)
Distributed error variances
Centralized error variances
05
055
06
065
07
075
08
Filte
ring
erro
r var
ianc
es
p(4) = 03
p(4) = 05
p(4) = 07
p(4) = 09
050302 0604 0807 0901Probability p(3)
Figure 3 Centralized and distributed filtering error variances at 119896 =100 versus 119901(3) when 119901(4) = 03 05 07 and 09
are shown here In Figure 3 the centralized and distributedfiltering error variances are displayed versus 119901(3) for 119901(4) =03 05 07 and 09 As expected from this figure it isconcluded that as 119901(3) or 119901(4) increase the centralized anddistributed error variances both become smaller and hencethe performance of the centralized and distributed filtersimproves as these probabilities increase
Finally to evaluate the performance of the proposed fil-ters in comparisonwith other filters reported in the literaturethe filtering mean square error (MSE) at each sampling time119896 is calculated To compute the MSE one thousand indepen-dent simulations were considered and one hundred iterationsof each algorithm were performed considering the values119901(3)
= 05119901(4) = 075 A comparative analysis was carried outbetween the proposed centralized and distributed filters andthe following filters
(i) The centralized Kalman filter for systems with inde-pendent additive noises
(ii) The centralized filter for multisensor systems withmultiplicative noises in the state and observationequations missing measurements and noise correla-tion at the same sampling time [5]
(iii) The centralized filter for networked systems withmultiplicative noise in the state equation stochasticsensor gain degradation and independent additivenoises [13]
The results of these comparisons are displayed in Figure 4which shows that the proposed centralized and distributedfilters perform better than the other three centralized filtersTheKalmanfilter provides theworst estimations since neithermultiplicative noises nor missing measurements are taken
8 Discrete Dynamics in Nature and Society
Centralized Kalman filter Filter in [13]Filter in [5]Proposed centralized filter
Proposed distributed filter
0
05
1
15
2
25
3
35
4
45
Mea
n sq
uare
erro
rs
10 20 30 40 50 60 70 80 90 1000Iteration k
Figure 4 Mean square errors when 119901(3) = 05 119901(4) = 075
into accountThe performance of the filter in [5] is better thanthat of the filter in [13] since the latter ignores any correlationassumption and multiplicative observation noise in sensor 4is not taken into account
6 Conclusion
Thedistributed fusion filtering problemhas been investigatedfor multisensor stochastic systems with random parametermatrices and correlated noises The main outcomes andresults can be summarized as follows
(i) Recursive algorithms for the local LS linear filters ofthe system state based on the measured output datacoming from each sensor have been designed by aninnovation approach The computational procedureof these local filtering algorithms is very simple andsuitable for online applications
(ii) Once the local filters have been obtained a distributedfusion filter has been designed as thematrix-weightedsum of such local estimators which minimizes themean squared estimation error The error covariancematrices of such distributed fusion filter have beenalso derived
(iii) A numerical simulation example has illustrated theusefulness of the proposed results Error variancecomparison has shown that both the centralized andthe distributed filters outperform the local ones thisexample has also shown that the slight superiorityof the centralized filter over the distributed filter iscompensated by better robustness and fault-toleranceabilities of the latter This example has also high-lighted the applicability of the proposed algorithmfor a great variety of multisensor systems featuring
network-induced stochastic uncertainties such assensor gain degradation missing measurements ormultiplicative observation noises which can be dealtwith in the observation model considered in thispaper
A challenging further research topic is to address the esti-mation problem for this kind of system with random param-eter matrices considering a sensor network whose nodes aredistributed according to a given topology characterized by adirected graph Also an interesting future research topic is toconsider other kinds of stochastic uncertainties which oftenappear in networked systems such as random delays andpacket dropouts
Appendix
Proof of Theorem 4
This appendix provides the proof of Theorem 4 by aninnovation approach For the 119894th sensor the innovation attime 119896 is defined as 120583(119894)
119896= 119910(119894)
119896minus 119910(119894)
119896119896minus1 where 119910(119894)
119896119896minus1is
the LS linear estimator of 119910(119894)119896
based on measurements 119910(119894)119904
119904 le 119896minus1 Replacing the observation process by the innovationone the LS linear estimator (119894)
119896119871 of a random vector 119911
119896based
on the observations 119910(119894)1 119910
(119894)
119871 can be calculated as linear
combination of the innovations 120583(119894)1 120583
(119894)
119871 namely
(119894)
119896119871=
119871
sum
119904=1
119864 [119911119896120583(119894)119879
119904] (119864 [120583
(119894)
119904120583(119894)119879
119904])
minus1
120583(119894)
119904 119896 ge 1 (A1)
From system equations (1)-(2) and the OPL the statepredictor 119909(119894)
119896119896minus1 and the observation predictor 119910(119894)
119896119896minus1 verify
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+ 119908(119894)
119896minus1119896minus1 119896 ge 1 (A2)
119910(119894)
119896119896minus1= 119867
(119894)
119896119909(119894)
119896119896minus1+ V(119894)119896119896minus1
119896 ge 1 (A3)
Because of the correlation assumption (iii) the noise filter119908(119894)
119896119896and the one-stage noise predictor V(119894)
119896119896minus1are not equal
to zero and hence expressions for such estimators must becalculated
LS Linear Noise Estimators 119908(119894)119896119896
and V(119894)119896119896minus1
From the generalexpression for estimators (A1) taking into account the factthat by Remark 3
119864 [119908119896120583(119894)119879
119896] = 119864 [119908
119896119910(119894)119879
119896] =W
(119894)
119896
119864 [V(119894)119896120583(119894)119879
119896minus1] = 119864 [V(119894)
119896119910(119894)119879
119896minus1] =V
(119894)
119896119896minus1
(A4)
we have that the noise filter 119908(119894)119896119896
and the one-stage noisepredictor V(119894)
119896119896minus1 satisfy
119908(119894)
119896119896=W(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119908
(119894)
00= 0 (A5)
V(119894)119896119896minus1
=V(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 V(119894)
10= 0 (A6)
Discrete Dynamics in Nature and Society 9
Now we will prove the local filtering algorithm by severalsteps
(I) Derivation of the Filter (8) One-Stage State Predictor (9)andTheir Error CovarianceMatrices (10) and (11) RespectivelyFrom (A1) by denoting X
(119894)
119896= 119864[119909
119896120583(119894)119879
119896] and Π(119894)
119896=
119864[120583(119894)
119896120583(119894)119879
119896] expression (8) for the filter is obvious and from
this relation and theOPL we obtain (10) for the filtering errorcovariance
From (A2) and (A5) expression (9) withW(119894)119896satisfying
(6) for the state predictor is immediately obtained Thisexpression together with state equation (1) leads to (11) for theprediction error covariance matrix whereD
119896is given by (5)
andJ(119894)
119896= 119864[(119909
119896minus 119909(119894)
119896119896)119908119879
119896] clearly satisfies (12)
(II) Derivation of (13) for the Matrix X(119894)119896= 119864[119909
119896120583(119894)119879
119896] From
(8) and (9) the following recursive expression for the statepredictor is obtained
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus2+X(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 (A7)
where from (1) thematrixX(119894)119896119896minus1
= 119864[119909119896120583(119894)119879
119896minus1] clearly verifies
(15)Using relation (A7) and again (1) we obtain that the
correlation between the prediction error and the noiseM(119894)
119896equiv 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119894)119879119896] satisfies (14) This correlation
property allows us to obtain easily expression (13) for thematrixX(119894)
119896= 119864[119909
119896120583(119894)119879
119896] Indeed by the OPL we haveX(119894)
119896=
119864[(119909119896minus119909(119894)
119896119896minus1)119910(119894)119879
119896] and from (2) expression (13) forX(119894)
119896is
obtained
(III) Derivation of Innovation (16) and Its Covariance Matrix(17) From (A3) and (A6) it is clear that the innovation isgiven by (16) withV(119894)
119896119896minus1satisfying (7) Next expression (17)
for Π(119894)119896= 119864[120583
(119894)
119896120583(119894)119879
119896] is derived From the OPL and (2) we
have that
Π(119894)
119896= 119864 [119910
(119894)
119896120583(119894)119879
119896]
= 119867
(119894)
119896119864 [119909119896120583(119894)119879
119896] + 119864 [
(119894)
119896119909119896120583(119894)119879
119896]
+ 119864 [V(119894)119896120583(119894)119879
119896]
(A8)
(i) Again from the OPL and (2) and the conditionalexpectation properties
119864 [(119894)
119896119909119896120583(119894)119879
119896] = 119864 [
(119894)
119896119909119896119909119879
119896(119894)119879
119896]
= 119864 [(119894)
119896D119896(119894)119879
119896] 119896 ge 1
(A9)
(ii) Using (16) for 120583(119894)119896 with (2) for 119910(119894)
119896 we obtain that
119864 [V(119894)119896120583(119894)119879
119896] =M
(119894)119879
119896119867
(119894)119879
119896+ 119877(119894)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
119864 [V(119894)1120583(119894)119879
1] =M
(119894)119879
1119867
(119894)119879
1+ 119877(119894)
1
(A10)
Substituting the above expectations into (A8) we easilyobtain (17) and the proof is completed
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This research is supported by Ministerio de Economıa yCompetitividad (Grant no MTM2014-52291-P and FPU pro-gramme)
References
[1] S-L Sun ldquoMulti-sensor optimal information fusion Kalmanfilters with applicationsrdquo Aerospace Science and Technology vol8 no 1 pp 57ndash62 2004
[2] X Sun and G Yan ldquoDistributed state fusion Kalman predictorbased onWLS algorithmrdquoProcedia Engineering vol 29 pp 216ndash222 2012
[3] C Ran andZDeng ldquoSelf-tuningweightedmeasurement fusionKalman filtering algorithmrdquo Computational Statistics amp DataAnalysis vol 56 no 6 pp 2112ndash2128 2012
[4] Y Song G Wei and G Yang ldquoDistributed 119867infin
filtering for aclass of sensor networks with uncertain rates of packet lossesrdquoSignal Processing vol 104 pp 143ndash151 2014
[5] J Ma and S Sun ldquoCentralized fusion estimators for multi-sensor systems withmultiplicative noises andmissingmeasure-mentsrdquo Journal of Networks vol 7 no 10 pp 1538ndash1545 2012
[6] L Li and Y Xia ldquoUnscented kalman filter over unreliable com-munication networks with markovian packet dropoutsrdquo IEEETransactions on Automatic Control vol 58 no 12 pp 3224ndash3230 2013
[7] X He Z Wang X Wang and D H Zhou ldquoNetworked strongtracking filteringwithmultiple packet dropouts algorithms andapplicationsrdquo IEEE Transactions on Industrial Electronics vol61 no 3 pp 1454ndash1463 2014
[8] S Wang H Fang and X Tian ldquoRecursive estimation for non-linear stochastic systems with multi-step transmission delaysmultiple packet dropouts and correlated noisesrdquo Signal Process-ing vol 115 pp 164ndash175 2015
[9] D Chen Y Yu L Xu and X Liu ldquoKalman filtering for discretestochastic systems with multiplicative noises and random two-step sensor delaysrdquoDiscreteDynamics inNature and Society vol2015 Article ID 809734 11 pages 2015
[10] X Shen Y Luo Y Zhu and E Song ldquoGlobally optimaldistributed Kalman filtering fusionrdquo Science China InformationSciences vol 55 no 3 pp 512ndash529 2012
[11] J Feng Z Wang and M Zeng ldquoDistributed weighted robustKalman filter fusion for uncertain systems with autocorrelatedand cross-correlated noisesrdquo Information Fusion vol 14 no 1pp 78ndash86 2013
[12] C Sanchez-Gonzalez and T M Garcıa-Munoz ldquoRecursivelinear estimation for discrete-time systems in the presence ofdifferent multiplicative observation noisesrdquo Discrete Dynamicsin Nature and Society vol 2010 Article ID 875023 12 pages2010
[13] Y Liu X He Z Wang and D Zhou ldquoOptimal filtering fornetworked systems with stochastic sensor gain degradationrdquoAutomatica vol 50 no 5 pp 1521ndash1525 2014
10 Discrete Dynamics in Nature and Society
[14] Y Luo Y Zhu D Luo J Zhou E Song and DWang ldquoGloballyoptimal multisensor distributed random parameter matricesKalman filtering fusion with applicationsrdquo Sensors vol 8 no12 pp 8086ndash8103 2008
[15] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[16] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoCovariance-based estimation from multisensor delayed mea-surements with random parameter matrices and correlatednoisesrdquoMathematical Problems in Engineering vol 2014 ArticleID 958474 13 pages 2014
[17] J Linares-Perez R Caballero-Aguila and I Garcıa-GarridoldquoOptimal linear filter design for systems with correlation inthe measurement matrices and noises recursive algorithm andapplicationsrdquo International Journal of Systems Science vol 45no 7 pp 1548ndash1562 2014
[18] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoOptimal state estimation for networked systems with randomparameter matrices correlated noises and delayed measure-mentsrdquo International Journal of General Systems vol 44 no 2pp 142ndash154 2015
[19] J Feng and M Zeng ldquoOptimal distributed Kalman filteringfusion for a linear dynamic systemwith cross-correlated noisesrdquoInternational Journal of Systems Science vol 43 no 2 pp 385ndash398 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Discrete Dynamics in Nature and Society
Centralized Kalman filter Filter in [13]Filter in [5]Proposed centralized filter
Proposed distributed filter
0
05
1
15
2
25
3
35
4
45
Mea
n sq
uare
erro
rs
10 20 30 40 50 60 70 80 90 1000Iteration k
Figure 4 Mean square errors when 119901(3) = 05 119901(4) = 075
into accountThe performance of the filter in [5] is better thanthat of the filter in [13] since the latter ignores any correlationassumption and multiplicative observation noise in sensor 4is not taken into account
6 Conclusion
Thedistributed fusion filtering problemhas been investigatedfor multisensor stochastic systems with random parametermatrices and correlated noises The main outcomes andresults can be summarized as follows
(i) Recursive algorithms for the local LS linear filters ofthe system state based on the measured output datacoming from each sensor have been designed by aninnovation approach The computational procedureof these local filtering algorithms is very simple andsuitable for online applications
(ii) Once the local filters have been obtained a distributedfusion filter has been designed as thematrix-weightedsum of such local estimators which minimizes themean squared estimation error The error covariancematrices of such distributed fusion filter have beenalso derived
(iii) A numerical simulation example has illustrated theusefulness of the proposed results Error variancecomparison has shown that both the centralized andthe distributed filters outperform the local ones thisexample has also shown that the slight superiorityof the centralized filter over the distributed filter iscompensated by better robustness and fault-toleranceabilities of the latter This example has also high-lighted the applicability of the proposed algorithmfor a great variety of multisensor systems featuring
network-induced stochastic uncertainties such assensor gain degradation missing measurements ormultiplicative observation noises which can be dealtwith in the observation model considered in thispaper
A challenging further research topic is to address the esti-mation problem for this kind of system with random param-eter matrices considering a sensor network whose nodes aredistributed according to a given topology characterized by adirected graph Also an interesting future research topic is toconsider other kinds of stochastic uncertainties which oftenappear in networked systems such as random delays andpacket dropouts
Appendix
Proof of Theorem 4
This appendix provides the proof of Theorem 4 by aninnovation approach For the 119894th sensor the innovation attime 119896 is defined as 120583(119894)
119896= 119910(119894)
119896minus 119910(119894)
119896119896minus1 where 119910(119894)
119896119896minus1is
the LS linear estimator of 119910(119894)119896
based on measurements 119910(119894)119904
119904 le 119896minus1 Replacing the observation process by the innovationone the LS linear estimator (119894)
119896119871 of a random vector 119911
119896based
on the observations 119910(119894)1 119910
(119894)
119871 can be calculated as linear
combination of the innovations 120583(119894)1 120583
(119894)
119871 namely
(119894)
119896119871=
119871
sum
119904=1
119864 [119911119896120583(119894)119879
119904] (119864 [120583
(119894)
119904120583(119894)119879
119904])
minus1
120583(119894)
119904 119896 ge 1 (A1)
From system equations (1)-(2) and the OPL the statepredictor 119909(119894)
119896119896minus1 and the observation predictor 119910(119894)
119896119896minus1 verify
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus1+ 119908(119894)
119896minus1119896minus1 119896 ge 1 (A2)
119910(119894)
119896119896minus1= 119867
(119894)
119896119909(119894)
119896119896minus1+ V(119894)119896119896minus1
119896 ge 1 (A3)
Because of the correlation assumption (iii) the noise filter119908(119894)
119896119896and the one-stage noise predictor V(119894)
119896119896minus1are not equal
to zero and hence expressions for such estimators must becalculated
LS Linear Noise Estimators 119908(119894)119896119896
and V(119894)119896119896minus1
From the generalexpression for estimators (A1) taking into account the factthat by Remark 3
119864 [119908119896120583(119894)119879
119896] = 119864 [119908
119896119910(119894)119879
119896] =W
(119894)
119896
119864 [V(119894)119896120583(119894)119879
119896minus1] = 119864 [V(119894)
119896119910(119894)119879
119896minus1] =V
(119894)
119896119896minus1
(A4)
we have that the noise filter 119908(119894)119896119896
and the one-stage noisepredictor V(119894)
119896119896minus1 satisfy
119908(119894)
119896119896=W(119894)
119896Π(119894)minus1
119896120583(119894)
119896 119896 ge 1 119908
(119894)
00= 0 (A5)
V(119894)119896119896minus1
=V(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 V(119894)
10= 0 (A6)
Discrete Dynamics in Nature and Society 9
Now we will prove the local filtering algorithm by severalsteps
(I) Derivation of the Filter (8) One-Stage State Predictor (9)andTheir Error CovarianceMatrices (10) and (11) RespectivelyFrom (A1) by denoting X
(119894)
119896= 119864[119909
119896120583(119894)119879
119896] and Π(119894)
119896=
119864[120583(119894)
119896120583(119894)119879
119896] expression (8) for the filter is obvious and from
this relation and theOPL we obtain (10) for the filtering errorcovariance
From (A2) and (A5) expression (9) withW(119894)119896satisfying
(6) for the state predictor is immediately obtained Thisexpression together with state equation (1) leads to (11) for theprediction error covariance matrix whereD
119896is given by (5)
andJ(119894)
119896= 119864[(119909
119896minus 119909(119894)
119896119896)119908119879
119896] clearly satisfies (12)
(II) Derivation of (13) for the Matrix X(119894)119896= 119864[119909
119896120583(119894)119879
119896] From
(8) and (9) the following recursive expression for the statepredictor is obtained
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus2+X(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 (A7)
where from (1) thematrixX(119894)119896119896minus1
= 119864[119909119896120583(119894)119879
119896minus1] clearly verifies
(15)Using relation (A7) and again (1) we obtain that the
correlation between the prediction error and the noiseM(119894)
119896equiv 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119894)119879119896] satisfies (14) This correlation
property allows us to obtain easily expression (13) for thematrixX(119894)
119896= 119864[119909
119896120583(119894)119879
119896] Indeed by the OPL we haveX(119894)
119896=
119864[(119909119896minus119909(119894)
119896119896minus1)119910(119894)119879
119896] and from (2) expression (13) forX(119894)
119896is
obtained
(III) Derivation of Innovation (16) and Its Covariance Matrix(17) From (A3) and (A6) it is clear that the innovation isgiven by (16) withV(119894)
119896119896minus1satisfying (7) Next expression (17)
for Π(119894)119896= 119864[120583
(119894)
119896120583(119894)119879
119896] is derived From the OPL and (2) we
have that
Π(119894)
119896= 119864 [119910
(119894)
119896120583(119894)119879
119896]
= 119867
(119894)
119896119864 [119909119896120583(119894)119879
119896] + 119864 [
(119894)
119896119909119896120583(119894)119879
119896]
+ 119864 [V(119894)119896120583(119894)119879
119896]
(A8)
(i) Again from the OPL and (2) and the conditionalexpectation properties
119864 [(119894)
119896119909119896120583(119894)119879
119896] = 119864 [
(119894)
119896119909119896119909119879
119896(119894)119879
119896]
= 119864 [(119894)
119896D119896(119894)119879
119896] 119896 ge 1
(A9)
(ii) Using (16) for 120583(119894)119896 with (2) for 119910(119894)
119896 we obtain that
119864 [V(119894)119896120583(119894)119879
119896] =M
(119894)119879
119896119867
(119894)119879
119896+ 119877(119894)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
119864 [V(119894)1120583(119894)119879
1] =M
(119894)119879
1119867
(119894)119879
1+ 119877(119894)
1
(A10)
Substituting the above expectations into (A8) we easilyobtain (17) and the proof is completed
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This research is supported by Ministerio de Economıa yCompetitividad (Grant no MTM2014-52291-P and FPU pro-gramme)
References
[1] S-L Sun ldquoMulti-sensor optimal information fusion Kalmanfilters with applicationsrdquo Aerospace Science and Technology vol8 no 1 pp 57ndash62 2004
[2] X Sun and G Yan ldquoDistributed state fusion Kalman predictorbased onWLS algorithmrdquoProcedia Engineering vol 29 pp 216ndash222 2012
[3] C Ran andZDeng ldquoSelf-tuningweightedmeasurement fusionKalman filtering algorithmrdquo Computational Statistics amp DataAnalysis vol 56 no 6 pp 2112ndash2128 2012
[4] Y Song G Wei and G Yang ldquoDistributed 119867infin
filtering for aclass of sensor networks with uncertain rates of packet lossesrdquoSignal Processing vol 104 pp 143ndash151 2014
[5] J Ma and S Sun ldquoCentralized fusion estimators for multi-sensor systems withmultiplicative noises andmissingmeasure-mentsrdquo Journal of Networks vol 7 no 10 pp 1538ndash1545 2012
[6] L Li and Y Xia ldquoUnscented kalman filter over unreliable com-munication networks with markovian packet dropoutsrdquo IEEETransactions on Automatic Control vol 58 no 12 pp 3224ndash3230 2013
[7] X He Z Wang X Wang and D H Zhou ldquoNetworked strongtracking filteringwithmultiple packet dropouts algorithms andapplicationsrdquo IEEE Transactions on Industrial Electronics vol61 no 3 pp 1454ndash1463 2014
[8] S Wang H Fang and X Tian ldquoRecursive estimation for non-linear stochastic systems with multi-step transmission delaysmultiple packet dropouts and correlated noisesrdquo Signal Process-ing vol 115 pp 164ndash175 2015
[9] D Chen Y Yu L Xu and X Liu ldquoKalman filtering for discretestochastic systems with multiplicative noises and random two-step sensor delaysrdquoDiscreteDynamics inNature and Society vol2015 Article ID 809734 11 pages 2015
[10] X Shen Y Luo Y Zhu and E Song ldquoGlobally optimaldistributed Kalman filtering fusionrdquo Science China InformationSciences vol 55 no 3 pp 512ndash529 2012
[11] J Feng Z Wang and M Zeng ldquoDistributed weighted robustKalman filter fusion for uncertain systems with autocorrelatedand cross-correlated noisesrdquo Information Fusion vol 14 no 1pp 78ndash86 2013
[12] C Sanchez-Gonzalez and T M Garcıa-Munoz ldquoRecursivelinear estimation for discrete-time systems in the presence ofdifferent multiplicative observation noisesrdquo Discrete Dynamicsin Nature and Society vol 2010 Article ID 875023 12 pages2010
[13] Y Liu X He Z Wang and D Zhou ldquoOptimal filtering fornetworked systems with stochastic sensor gain degradationrdquoAutomatica vol 50 no 5 pp 1521ndash1525 2014
10 Discrete Dynamics in Nature and Society
[14] Y Luo Y Zhu D Luo J Zhou E Song and DWang ldquoGloballyoptimal multisensor distributed random parameter matricesKalman filtering fusion with applicationsrdquo Sensors vol 8 no12 pp 8086ndash8103 2008
[15] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[16] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoCovariance-based estimation from multisensor delayed mea-surements with random parameter matrices and correlatednoisesrdquoMathematical Problems in Engineering vol 2014 ArticleID 958474 13 pages 2014
[17] J Linares-Perez R Caballero-Aguila and I Garcıa-GarridoldquoOptimal linear filter design for systems with correlation inthe measurement matrices and noises recursive algorithm andapplicationsrdquo International Journal of Systems Science vol 45no 7 pp 1548ndash1562 2014
[18] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoOptimal state estimation for networked systems with randomparameter matrices correlated noises and delayed measure-mentsrdquo International Journal of General Systems vol 44 no 2pp 142ndash154 2015
[19] J Feng and M Zeng ldquoOptimal distributed Kalman filteringfusion for a linear dynamic systemwith cross-correlated noisesrdquoInternational Journal of Systems Science vol 43 no 2 pp 385ndash398 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 9
Now we will prove the local filtering algorithm by severalsteps
(I) Derivation of the Filter (8) One-Stage State Predictor (9)andTheir Error CovarianceMatrices (10) and (11) RespectivelyFrom (A1) by denoting X
(119894)
119896= 119864[119909
119896120583(119894)119879
119896] and Π(119894)
119896=
119864[120583(119894)
119896120583(119894)119879
119896] expression (8) for the filter is obvious and from
this relation and theOPL we obtain (10) for the filtering errorcovariance
From (A2) and (A5) expression (9) withW(119894)119896satisfying
(6) for the state predictor is immediately obtained Thisexpression together with state equation (1) leads to (11) for theprediction error covariance matrix whereD
119896is given by (5)
andJ(119894)
119896= 119864[(119909
119896minus 119909(119894)
119896119896)119908119879
119896] clearly satisfies (12)
(II) Derivation of (13) for the Matrix X(119894)119896= 119864[119909
119896120583(119894)119879
119896] From
(8) and (9) the following recursive expression for the statepredictor is obtained
119909(119894)
119896119896minus1= 119865119896minus1119909(119894)
119896minus1119896minus2+X(119894)
119896119896minus1Π(119894)minus1
119896minus1120583(119894)
119896minus1 119896 ge 2 (A7)
where from (1) thematrixX(119894)119896119896minus1
= 119864[119909119896120583(119894)119879
119896minus1] clearly verifies
(15)Using relation (A7) and again (1) we obtain that the
correlation between the prediction error and the noiseM(119894)
119896equiv 119864[(119909
119896minus 119909(119894)
119896119896minus1)V(119894)119879119896] satisfies (14) This correlation
property allows us to obtain easily expression (13) for thematrixX(119894)
119896= 119864[119909
119896120583(119894)119879
119896] Indeed by the OPL we haveX(119894)
119896=
119864[(119909119896minus119909(119894)
119896119896minus1)119910(119894)119879
119896] and from (2) expression (13) forX(119894)
119896is
obtained
(III) Derivation of Innovation (16) and Its Covariance Matrix(17) From (A3) and (A6) it is clear that the innovation isgiven by (16) withV(119894)
119896119896minus1satisfying (7) Next expression (17)
for Π(119894)119896= 119864[120583
(119894)
119896120583(119894)119879
119896] is derived From the OPL and (2) we
have that
Π(119894)
119896= 119864 [119910
(119894)
119896120583(119894)119879
119896]
= 119867
(119894)
119896119864 [119909119896120583(119894)119879
119896] + 119864 [
(119894)
119896119909119896120583(119894)119879
119896]
+ 119864 [V(119894)119896120583(119894)119879
119896]
(A8)
(i) Again from the OPL and (2) and the conditionalexpectation properties
119864 [(119894)
119896119909119896120583(119894)119879
119896] = 119864 [
(119894)
119896119909119896119909119879
119896(119894)119879
119896]
= 119864 [(119894)
119896D119896(119894)119879
119896] 119896 ge 1
(A9)
(ii) Using (16) for 120583(119894)119896 with (2) for 119910(119894)
119896 we obtain that
119864 [V(119894)119896120583(119894)119879
119896] =M
(119894)119879
119896119867
(119894)119879
119896+ 119877(119894)
119896
minusV(119894)
119896119896minus1Π(119894)minus1
119896minus1V(119894)119879
119896119896minus1 119896 ge 2
119864 [V(119894)1120583(119894)119879
1] =M
(119894)119879
1119867
(119894)119879
1+ 119877(119894)
1
(A10)
Substituting the above expectations into (A8) we easilyobtain (17) and the proof is completed
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgment
This research is supported by Ministerio de Economıa yCompetitividad (Grant no MTM2014-52291-P and FPU pro-gramme)
References
[1] S-L Sun ldquoMulti-sensor optimal information fusion Kalmanfilters with applicationsrdquo Aerospace Science and Technology vol8 no 1 pp 57ndash62 2004
[2] X Sun and G Yan ldquoDistributed state fusion Kalman predictorbased onWLS algorithmrdquoProcedia Engineering vol 29 pp 216ndash222 2012
[3] C Ran andZDeng ldquoSelf-tuningweightedmeasurement fusionKalman filtering algorithmrdquo Computational Statistics amp DataAnalysis vol 56 no 6 pp 2112ndash2128 2012
[4] Y Song G Wei and G Yang ldquoDistributed 119867infin
filtering for aclass of sensor networks with uncertain rates of packet lossesrdquoSignal Processing vol 104 pp 143ndash151 2014
[5] J Ma and S Sun ldquoCentralized fusion estimators for multi-sensor systems withmultiplicative noises andmissingmeasure-mentsrdquo Journal of Networks vol 7 no 10 pp 1538ndash1545 2012
[6] L Li and Y Xia ldquoUnscented kalman filter over unreliable com-munication networks with markovian packet dropoutsrdquo IEEETransactions on Automatic Control vol 58 no 12 pp 3224ndash3230 2013
[7] X He Z Wang X Wang and D H Zhou ldquoNetworked strongtracking filteringwithmultiple packet dropouts algorithms andapplicationsrdquo IEEE Transactions on Industrial Electronics vol61 no 3 pp 1454ndash1463 2014
[8] S Wang H Fang and X Tian ldquoRecursive estimation for non-linear stochastic systems with multi-step transmission delaysmultiple packet dropouts and correlated noisesrdquo Signal Process-ing vol 115 pp 164ndash175 2015
[9] D Chen Y Yu L Xu and X Liu ldquoKalman filtering for discretestochastic systems with multiplicative noises and random two-step sensor delaysrdquoDiscreteDynamics inNature and Society vol2015 Article ID 809734 11 pages 2015
[10] X Shen Y Luo Y Zhu and E Song ldquoGlobally optimaldistributed Kalman filtering fusionrdquo Science China InformationSciences vol 55 no 3 pp 512ndash529 2012
[11] J Feng Z Wang and M Zeng ldquoDistributed weighted robustKalman filter fusion for uncertain systems with autocorrelatedand cross-correlated noisesrdquo Information Fusion vol 14 no 1pp 78ndash86 2013
[12] C Sanchez-Gonzalez and T M Garcıa-Munoz ldquoRecursivelinear estimation for discrete-time systems in the presence ofdifferent multiplicative observation noisesrdquo Discrete Dynamicsin Nature and Society vol 2010 Article ID 875023 12 pages2010
[13] Y Liu X He Z Wang and D Zhou ldquoOptimal filtering fornetworked systems with stochastic sensor gain degradationrdquoAutomatica vol 50 no 5 pp 1521ndash1525 2014
10 Discrete Dynamics in Nature and Society
[14] Y Luo Y Zhu D Luo J Zhou E Song and DWang ldquoGloballyoptimal multisensor distributed random parameter matricesKalman filtering fusion with applicationsrdquo Sensors vol 8 no12 pp 8086ndash8103 2008
[15] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[16] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoCovariance-based estimation from multisensor delayed mea-surements with random parameter matrices and correlatednoisesrdquoMathematical Problems in Engineering vol 2014 ArticleID 958474 13 pages 2014
[17] J Linares-Perez R Caballero-Aguila and I Garcıa-GarridoldquoOptimal linear filter design for systems with correlation inthe measurement matrices and noises recursive algorithm andapplicationsrdquo International Journal of Systems Science vol 45no 7 pp 1548ndash1562 2014
[18] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoOptimal state estimation for networked systems with randomparameter matrices correlated noises and delayed measure-mentsrdquo International Journal of General Systems vol 44 no 2pp 142ndash154 2015
[19] J Feng and M Zeng ldquoOptimal distributed Kalman filteringfusion for a linear dynamic systemwith cross-correlated noisesrdquoInternational Journal of Systems Science vol 43 no 2 pp 385ndash398 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Discrete Dynamics in Nature and Society
[14] Y Luo Y Zhu D Luo J Zhou E Song and DWang ldquoGloballyoptimal multisensor distributed random parameter matricesKalman filtering fusion with applicationsrdquo Sensors vol 8 no12 pp 8086ndash8103 2008
[15] J Hu Z Wang and H Gao ldquoRecursive filtering with randomparameter matrices multiple fading measurements and corre-lated noisesrdquo Automatica vol 49 no 11 pp 3440ndash3448 2013
[16] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoCovariance-based estimation from multisensor delayed mea-surements with random parameter matrices and correlatednoisesrdquoMathematical Problems in Engineering vol 2014 ArticleID 958474 13 pages 2014
[17] J Linares-Perez R Caballero-Aguila and I Garcıa-GarridoldquoOptimal linear filter design for systems with correlation inthe measurement matrices and noises recursive algorithm andapplicationsrdquo International Journal of Systems Science vol 45no 7 pp 1548ndash1562 2014
[18] R Caballero-Aguila A Hermoso-Carazo and J Linares-PerezldquoOptimal state estimation for networked systems with randomparameter matrices correlated noises and delayed measure-mentsrdquo International Journal of General Systems vol 44 no 2pp 142ndash154 2015
[19] J Feng and M Zeng ldquoOptimal distributed Kalman filteringfusion for a linear dynamic systemwith cross-correlated noisesrdquoInternational Journal of Systems Science vol 43 no 2 pp 385ndash398 2012
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
![Adaptive Gradient-Based and Anisotropic Diffusion Equation ... · rithm [4], feature fusion filtering algorithm [5-7], wavelet based filtering algorithm [8-11] etc., some specific](https://static.fdocuments.net/doc/165x107/5f068e2f7e708231d4189211/adaptive-gradient-based-and-anisotropic-diffusion-equation-rithm-4-feature.jpg)

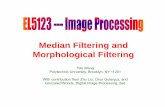







![Multi-Evidence Filtering and Fusion for Multi-Label ...openaccess.thecvf.com/content_cvpr_2018/papers/Ge_Multi-Evidence... · ferentmechanisms,includingbottom-up,top-down[44,23] and](https://static.fdocuments.net/doc/165x107/5d5a33f988c993db0d8be2bb/multi-evidence-filtering-and-fusion-for-multi-label-ferentmechanismsincludingbottom-uptop-down4423.jpg)





