
Research Article Development of a Wearable-Sensor-Based...
12
Research Article Development of a Wearable-Sensor-Based Fall Detection System Falin Wu, 1 Hengyang Zhao, 1 Yan Zhao, 1 and Haibo Zhong 2 1 School of Instrumentation Science and Optoelectronics Engineering, Beihang University, Beijing 100191, China 2 Space Star Technology Co., Ltd., Beijing 100086, China Correspondence should be addressed to Hengyang Zhao; [email protected] Received 6 August 2014; Revised 22 December 2014; Accepted 30 December 2014 Academic Editor: Fei Hu Copyright © 2015 Falin Wu et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Fall detection is a major challenge in the public healthcare domain, especially for the elderly as the decline of their physical fitness, and timely and reliable surveillance is necessary to mitigate the negative effects of falls. is paper develops a novel fall detection system based on a wearable device. e system monitors the movements of human body, recognizes a fall from normal daily activities by an effective quaternion algorithm, and automatically sends request for help to the caregivers with the patient’s location. 1. Introduction Falls of the elderly always lead to serious health issues as the decline of their physical fitness [1]. Fracture is the most common injury in fall of an elderly and there is also a certain possibility to get coma, brain trauma, and paralysis. At most fall situations, the fall process is the main source of injury because of the high impact. But sometimes the late medical salvage may worsen the situation [2]. at means the faster the salvage comes, the less risk the elderly will face. Progress of technology brings more possibilities to help us protect the elderly. Low power consumption components make it possible to realize wearable monitoring device. MEMS (microelectro mechanical systems) sensors have sim- plified the design and implementation of sensor system. Location based service (LBS) makes it more convenient to locate the elderly in health monitoring. Beside these, mobile computing makes remote health monitoring easier to realize. Several kinds of fall detection methods have been devel- oped or applied in our life [3]. One of them is computer vision based method. Cameras are distributed at limited space to offer pictures or videos of human activities to implement fall detection algorithm. External supports such as motion sensors could be used to enhance computer vision based fall detection method [4], and a data fusion algorithm can oper- ate the validation and correlation among the two subsystems to raise robust performance of fall detection. ese computer based methods work effectively in indoor environment, but they are hard to realize in outdoor environment as the deployment of cameras is always limited. Motion sensor-based method is also commonly used. Accelerometer and gyroscope could provide linear and angu- lar motion information directly. Sensor measurements or their proper fusion could be used to distinguish a real fall. ere are several kinds of detection methods which differ in constitution of motion sensors and detection algorithms. e first kind of detection method is using an accelerometer. A single triaxial accelerometer can provide object’s accel- erations in three directions which include the influence of gravity. A coordinate will be built when the accelerometer is fixed on human’s body. e influence of gravity or dynamic acceleration is available by using a low pass filter or a high pass filter [5]. Some kinds of angular movement information can also be calculated based on the relationship between accel- eration components and their vector sum [6]. e second kind of detection method is based on both accelerometer and gyroscope [7]. Gyroscope can offer angular velocity and the accelerometer could offer linear motion information. e third kind of detection method also uses a magnetometer. A triaxial magnetometer can detect magnetic strength in three directions, and it can also provide angular motion informa- tion in the horizontal plane. But the environment magnetic field may disturb the geomagnetic field which reduces the reliability of the magnetometer outputs, for instance, in Hindawi Publishing Corporation International Journal of Telemedicine and Applications Volume 2015, Article ID 576364, 11 pages http://dx.doi.org/10.1155/2015/576364
Transcript of Research Article Development of a Wearable-Sensor-Based...
Research ArticleDevelopment of a Wearable-Sensor-Based Fall Detection System
Falin Wu1 Hengyang Zhao1 Yan Zhao1 and Haibo Zhong2
1School of Instrumentation Science and Optoelectronics Engineering Beihang University Beijing 100191 China2Space Star Technology Co Ltd Beijing 100086 China
Correspondence should be addressed to Hengyang Zhao hengyang178163com
Received 6 August 2014 Revised 22 December 2014 Accepted 30 December 2014
Academic Editor Fei Hu
Copyright copy 2015 Falin Wu et alThis is an open access article distributed under the Creative CommonsAttribution License whichpermits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Fall detection is a major challenge in the public healthcare domain especially for the elderly as the decline of their physical fitnessand timely and reliable surveillance is necessary to mitigate the negative effects of falls This paper develops a novel fall detectionsystem based on a wearable device The system monitors the movements of human body recognizes a fall from normal dailyactivities by an effective quaternion algorithm and automatically sends request for help to the caregivers with the patientrsquos location
1 Introduction
Falls of the elderly always lead to serious health issues asthe decline of their physical fitness [1] Fracture is the mostcommon injury in fall of an elderly and there is also a certainpossibility to get coma brain trauma and paralysis At mostfall situations the fall process is the main source of injurybecause of the high impact But sometimes the late medicalsalvage may worsen the situation [2] That means the fasterthe salvage comes the less risk the elderly will face
Progress of technology brings more possibilities to helpus protect the elderly Low power consumption componentsmake it possible to realize wearable monitoring deviceMEMS (microelectro mechanical systems) sensors have sim-plified the design and implementation of sensor systemLocation based service (LBS) makes it more convenient tolocate the elderly in health monitoring Beside these mobilecomputing makes remote health monitoring easier to realize
Several kinds of fall detection methods have been devel-oped or applied in our life [3] One of them is computer visionbased method Cameras are distributed at limited space tooffer pictures or videos of human activities to implementfall detection algorithm External supports such as motionsensors could be used to enhance computer vision based falldetection method [4] and a data fusion algorithm can oper-ate the validation and correlation among the two subsystemsto raise robust performance of fall detectionThese computer
based methods work effectively in indoor environment butthey are hard to realize in outdoor environment as thedeployment of cameras is always limited
Motion sensor-based method is also commonly usedAccelerometer and gyroscope could provide linear and angu-lar motion information directly Sensor measurements ortheir proper fusion could be used to distinguish a real fallThere are several kinds of detection methods which differin constitution of motion sensors and detection algorithmsThe first kind of detection method is using an accelerometerA single triaxial accelerometer can provide objectrsquos accel-erations in three directions which include the influence ofgravity A coordinate will be built when the accelerometer isfixed on humanrsquos body The influence of gravity or dynamicacceleration is available by using a lowpass filter or a high passfilter [5] Some kinds of angular movement information canalso be calculated based on the relationship between accel-eration components and their vector sum [6] The secondkind of detection method is based on both accelerometerand gyroscope [7] Gyroscope can offer angular velocity andthe accelerometer could offer linear motion informationThethird kind of detection method also uses a magnetometer Atriaxial magnetometer can detect magnetic strength in threedirections and it can also provide angular motion informa-tion in the horizontal plane But the environment magneticfield may disturb the geomagnetic field which reduces thereliability of the magnetometer outputs for instance in
Hindawi Publishing CorporationInternational Journal of Telemedicine and ApplicationsVolume 2015 Article ID 576364 11 pageshttpdxdoiorg1011552015576364
2 International Journal of Telemedicine and Applications
GPS
Wearable device
GSM network Receiver terminal
Alarm short message
Figure 1 System architecture
some steel structure architecture or near some objects withstrong electromagnetism As angular information can alsobe extracted from accelerometer measurements a state spacefilter such as the Kalman filter is a commonly used techniqueto combine angular motion information [8] Beside thesesensors such as barometer can also assist puremotion sensorsat human gait recognition [9]
But in fact using more sensors means more powerconsumption and it is a challenge to design a properalgorithm to fuse different kinds of sensors A single triaxialaccelerometer is quite enough for human fall detection assufficient information could be extracted from its measure-ments Besides this the accelerometer coordinate does nothave to be fixed if only themagnitude of sum vector is needed[10] and that is quite convenient for wearable application Inthis paper a fall detection system based on a wearable deviceis developed The hardware and software realization of thedevice is mainly based on a single triaxial accelerometer andGPSGSMmodule The device uses an efficient fall detectionalgorithm with less resource and power consumption whichmeans that it is a proper design for outdoor application
2 System Design
The architecture of the developed system is described inFigure 1 A wearable device is placed on humanrsquos waist Thesystem can detect the elderlyrsquos falling by acceleration analysisThen it will get the elderlyrsquos geographic position and sendfall alarm short message to caregivers So the elderly who hasfallen can get timely help to minimize the negative influence
3 Fall Detection Algorithm
31 Overview Choice of recognition feature has decisivesignificance to successful fall detection Information likelinear movements (eg displacement velocity and acceler-ation) and angular movements (eg angle angular veloc-ity and angular acceleration) could be obtained directlyor indirectly Beside these frequency domain parameterscould be extracted from basic sensor measurements bytechniques such as FFT andwavelet [11 12] For single triaxialaccelerometer application accelerations and derived angularparameters could be used as recognition features
Fall detection algorithm design is based on the choice ofrecognition features According to the recognition feature
fall detection algorithms are classified as threshold basedand machine learning based For threshold based methodthreshold of recognition feature is set by the designer beforeapplication which makes the algorithm have rapid responseand less resource consumption [13] But the choice of thresh-old needs both rigorous schemes and adequate experimentsFor machine learning based design the classification offall and normal activities is available with the assistance oftechnologies such as support vector machine (SVM) andneural network [14 15] Machine learning assistance mayenhance system robustness to some extent but its algorithmdesign is always high computing resource consumed whichlimits its application in wearable device As the compactwearable device requires low power consumption and a singletriaxial accelerometer could provide effective informationthreshold based fall detection algorithm will be used in thissystem
32 Algorithm Design Algorithm used in this fall alarmsystem is based on thresholds of sum acceleration and rota-tion angle information When a real fall happens collisionbetween humanrsquos body and groundwill produce obvious peakvalue at the sum acceleration a which has magnitude as
|a| = radic119886119909
2 + 119886119910
2 + 119886119911
2 (1)
where 119886119909 119886119910 and 119886
119911present accelerometer measurements of
three axes The system uses the sum acceleration as the firststep to distinguish high intensity movements from othersBut normal motions such as jumping or sitting also producepeak values which mean that additional detection featuresare required
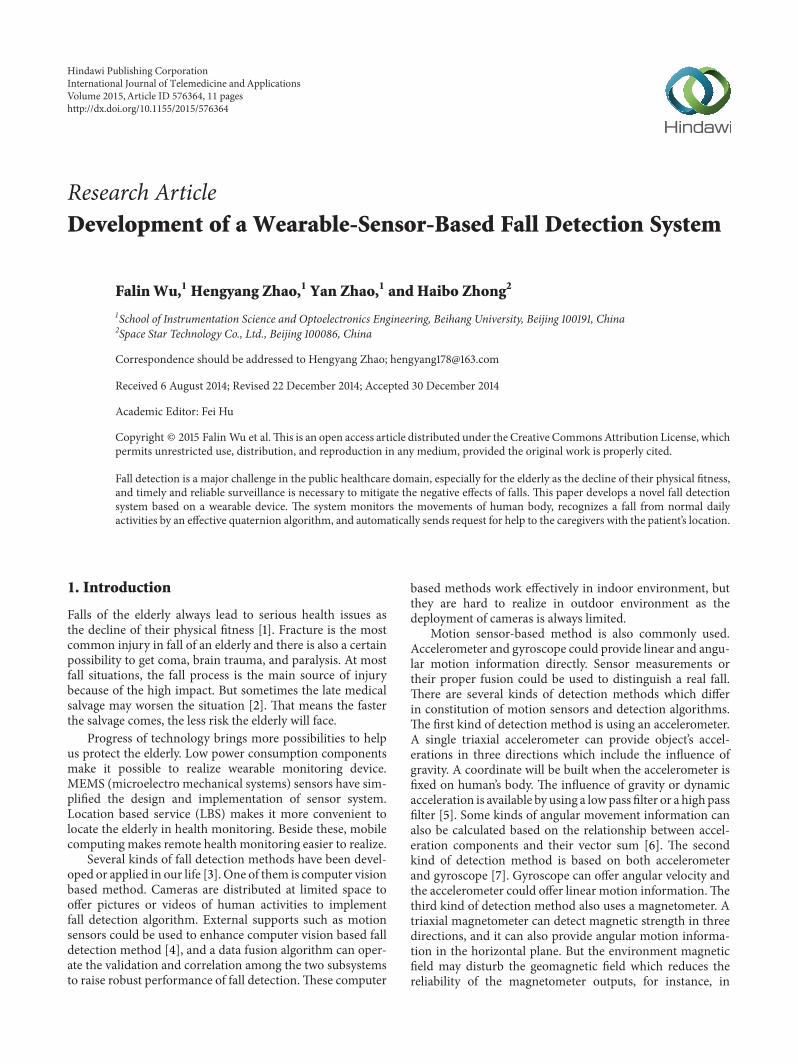
The second feature used here is an angle calculated basedon acceleration measurements As humanrsquos motion has lowacceleration it is feasible to get gravity component in eachaxis by using a low pass filter If gravity components could beseparated before and after humanrsquos fall then it is possible tocalculate the rotation angle of accelerometer coordinate in 3Dspace which is also equivalent to the rotation angle of gravityvector relative to fixed coordinate Coordinate constructed bythe accelerometer and the gravity vector is shown in Figure 2The rotation of gravity vector in fixed coordinate is shown inFigure 3
International Journal of Telemedicine and Applications 3
g
Z
YX
(a)
g
ZY
X
(b)
Figure 2 Coordinate and gravity before and after falling (a) Before falling (b) After falling
gbefore
gafter
120579
Z
XY
Figure 3 Rotation of gravity relative to fixed coordinate
Quaternion is an effective tool to describe rotationmove-ment in humanrsquos gait change which also includes falling [16]A quaternion could be described as
Q = 1199020+ 1199021sdot 119894 + 119902
2sdot 119895 + 119902
3sdot 119896 (2)
which has magnitude as
Q = radic1199020
2 + 1199021
2 + 1199022
2 + 1199023
2 (3)
Unit quaternion which has magnitude Q = 1 can bedescribed as
Q = cos 1205792+ sin 1205792sdot 119902119909sdot 119894 + sin 120579
2sdot 119902119910sdot 119895 + sin 120579
2sdot 119902119911sdot 119896 (4)
As shown in Figure 3 rotation angle of Q equals 120579The rotation axis is orthogonal to the rotation plane and
its direction is in accordance with right hand screw rule119902119909 119902119910 and 119902
119911are three components of the unit vector
which describes the orientation of the quaternion at the fixedcoordinate
Besides rotationmovement quaternion can also describea vector in 3D space such as the gravity vector g which couldbe described as a quaternion
g = 0 + 119892119909sdot 119894 + 119892
119910sdot 119895 + 119892
119911sdot 119896 (5)
119892119909 119892119910 and 119892
119911are three components of g which has quater-
nion magnitude as1003817100381710038171003817g1003817100381710038171003817 = radic119892
2
119909+ 1198922119910+ 1198922119911= 119892 (6)
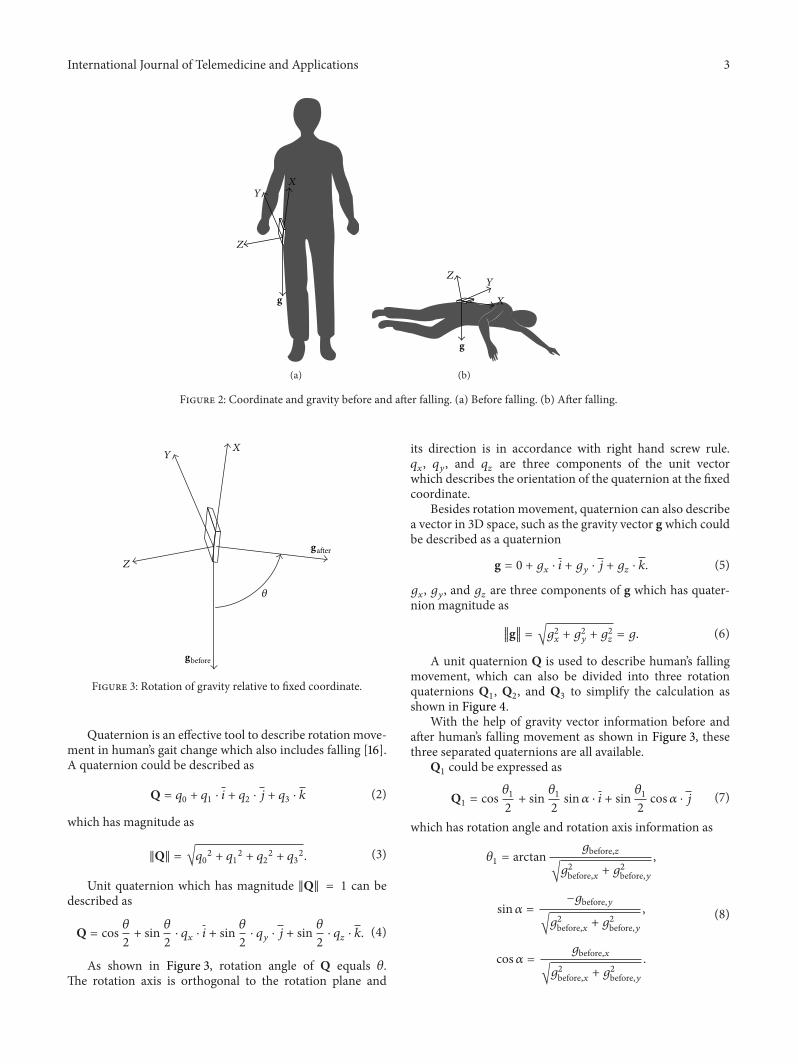
A unit quaternion Q is used to describe humanrsquos fallingmovement which can also be divided into three rotationquaternions Q
1 Q2 and Q
3to simplify the calculation as
shown in Figure 4With the help of gravity vector information before and
after humanrsquos falling movement as shown in Figure 3 thesethree separated quaternions are all available
Q1could be expressed as
Q1= cos 12057912+ sin 12057912sin120572 sdot 119894 + sin 1205791
2cos120572 sdot 119895 (7)
which has rotation angle and rotation axis information as
1205791= arctan
119892before119911
radic1198922before119909 + 1198922
before119910
sin120572 =minus119892before119910
radic1198922before119909 + 1198922
before119910
cos120572 =119892before119909
radic1198922before119909 + 1198922
before119910
(8)
4 International Journal of Telemedicine and Applications
Z
Y
X
1205791
(a)
Z
Y
X
1205792
(b)
Z
Y
X
1205793
(c)
Figure 4 Decomposition of fall rotation quaternion Q (a) QuaternionQ1 (b) Quaternion Q
2 (c) Quaternion Q
3
QuaternionQ2can be calculated as
Q2= cos 12057922+ sin 12057922sdot 119896 (9)
which has rotation angle as
1205792= arctan 2
119892after119910
119892after119909minus arctan 2
119892before119910
119892before119909 (10)
QuaternionQ3is
Q3= cos1205793
2+ sin1205793
2sin120573 sdot 119894 + sin
1205793
2cos120573 sdot 119895 (11)
with rotation angle and rotation axis information as
1205793= minus arctan
119892after119911
radic1198922after119909 + 1198922
after119910
sin120573 =minus119892after119910
radic1198922after119909 + 1198922
after119910
cos120573 =119892after119909
radic1198922after119909 + 1198922
after119910
(12)
Then the rotation of the fall movement can be expressedby quaternion multiplication as
gafter = Q otimes gbefore otimesQlowast
= Q3otimesQ2otimesQ1otimes gbefore otimesQ
lowast
1otimesQlowast2otimesQlowast3
(13)
whereQlowast = 1199020minus1199021sdot 119894minus1199022sdot119895minus1199023sdot119896 is the conjugate quaternion
of Q Quaternion algebra is normally implemented basedon basic matrix algebra [17] Quaternion multiplication usedabove could be realized by matrix multiplication as
Q otimes gbefore = M (Q)[[[[[
[
0
119892before119909
119892before119910
119892before119911
]]]]]
]
=
[[[[[
[
1199020minus1199021minus1199022minus1199023
11990211199020minus11990231199022
119902211990231199020minus1199021
1199023minus119902211990211199020
]]]]]
]
[[[[[
[
0
119892before119909
119892before119910
119892before119911
]]]]]
]
(14)
International Journal of Telemedicine and Applications 5
Accelerationacquisition
Regard asfalling
Impact state
and
Record a as gbeforewhile standing
|a| lt athreshold
|a| ge athresholdt ge tthreshold
t lt tthreshold|a| ≉ g
t ge tthreshold and |a| asymp g
Lying staterecord a as gafter
calculate 120579|120579| ≉ 90∘
|120579| asymp 90∘
Figure 5 Fall detection algorithm state machine
Power managerunit
AccelerometerADXL345
I2C
33V
MicrocontrollerMSP430F1611
USART
USART
GPSantenna
Gps
module
module
SIM908
GSM
GSMantenna
Figure 6 Basic hardware structure
The whole rotation quaternion can also be decomposedas
Q = Q3otimesQ2otimesQ1
= M (Q3)M (Q
2)Q1
(15)
Q1Q2 andQ
3are all available based on gravity information
before and after the falling movement At last it is possible to
get four elements of quaternionQ by the equation above andthe rotation angle 120579 could be calculated as
120579 = 2 sdot arctan(radic1199021
2 + 1199022
2 + 1199023
2
1199020
) (16)
6 International Journal of Telemedicine and Applications
GPS antenna MSP430F1611 ADXL345Top
SIM908 GSM antennaBottom
4000mm5000
mm
Figure 7 PCB board prototype
Yes
Yes
No
No
Record gbeforewhile standing
Fall detectionalgorithm
Get position andsend alarm SMS
Falling
Withdraw alarm
Remind the elderly
Inform caregiversthrough SMS
Figure 8 System software flow diagram
When an object is falling magnitude of 120579 will approach90∘ which is also a character different from most normalactivities So it could be used as the second detection featurebeside sum acceleration
The flow chart of the proposed algorithm is depicted inFigure 5
The wearable device will be mounted on humanrsquos waistat first to reflect the motion of human body closely [18] andthe device will record gbefore while the elderly is standing
stillThere is no special requirement of the device orientationbut only keep stationary during the wear 119886threshold means thethreshold of sum acceleration magnitude and 119905threshold meansthe threshold of oscillation time duration after the break of119886threshold
When measurements in three different axes have beenacquired the sum acceleration |a| will be calculated Whena real fall happens sum acceleration will reach peak value of|a| ge 119886threshold In a real falling the fluctuation of acceleration
International Journal of Telemedicine and Applications 7
0 05 1 15 2 25 3minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
Time (s)
Acce
lera
tion
(g)
(b)
05 1 15 2 25 3 35minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(c)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
8
9
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(d)
Figure 9 Acceleration waveforms during fall (a) Forward fall (b) Backward fall (c) Leftward fall (d) Rightward fall
will stop in time duration 119905threshold and then the sum accel-eration is |a| asymp 119892 as the elderly will lie on the ground Thenthe acceleration a is recorded as gafter Quaternion rotation 120579will be calculated based on information gbefore and gafter Atlast the system will consider it as a fall if the rotation angle|120579| asymp 90
∘
4 Implementation
41 Hardware ADIrsquos digital triaxial accelerometer ADXL345is themotion sensor used in this systemTheGPS service andGSM communication function are integrated in SIMComrsquos
SIM908 module TIrsquos 16 bits MCU MSP430F1611 is used tocontrol the whole system and imply the detection algorithm[19]
The measurement range of accelerometer could be set atplusmn2 g plusmn4 g plusmn8 g or plusmn16 g and the maximal sampling rate is32 kHz As humanrsquos activities are normally at low frequencybands [20] 100Hz is a proper sampling rate for human falldetection There is an inner digital filter in ADXL345 whichcould weaken noise and reduce the burden of digital signalprocessing inMCU to some extentThemeasurementswill besent through IIC (interintegrated circuit) bus communicationbetween the sensor and the MCU
8 International Journal of Telemedicine and Applications
SIM908 can offer GPS and GSM service on serial portcommunicationwithMCU and it can also work in low powermode
Each hardware component of the wearable device isworking under low voltage and the detection algorithmdoes not need complex calculation resource so the powerconsumption of the whole device is quite low A 1200mAh37 V polymer lithium battery is quite enough to provide theneed of the wearable device for a couple of days
Hardware structure of the detection device is shown inFigure 6 and the PCB board prototype is shown in Figure 7
42 Software The software design of the system can bedivided into two parts One of them is the software designin wearable device and the other is in the caregiverrsquos handset
421 Wearable Device Flow diagram of the wearable devicesoftware is shown in Figure 8
After initialization of the system gbefore would beextracted from acceleration measurements by using a lowpass filter when the elderly is standing After that the falldetection algorithmwill be applied If a fall has been detectedthe wearable device will locate the user and send alarmshort message to caregivers immediatelyThen the device willremind the elderly through vibration If the user withdrawsthe alarm by pressing a button manually the device will getback to fall detection state and a short message will be sent toinform the caregivers
422 Caregiverrsquos Handset There is aURL (universal resourcelocator) which links to a webmap in the alarm shortmessageThe fall location information will be highlighted on a webmap when the caregiver opens this link
5 System Test
System test of the fall detection system has been conductedbased on the system design described above
51 Wearable Device and Fall Detection Algorithm Thesampling rate of accelerometer is set at 100Hz and themeasurement range is plusmn16 g with a maximum precision of4mg MCU will read raw measurements from sensorrsquos innerFIFO and apply the detection algorithm
The test objects are three different volunteers at the agesof 23 42 and 60 respectively Based on analysis of thesevolunteersrsquo experiment data 119886threshold and 119905threshold are set as2 g and 2 s respectively In order to get g when standing andlying after the fall sum acceleration a which has magnitudebetween (1minus03) g and (1+03) g will be considered as gbeforeand gafter Considering that the tilt of the ground or the lyingposture of the elderly may affect the rotation angle rotationangle 120579 between (90 minus 30)∘ and (90 + 30)∘ will infer that theelderly has fallen
System test contains five kinds of activities of daily living(ie walking jumping squatting sitting and resting) andfour kinds of fallings (ie forward backward leftward andrightward)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
Figure 10 Resting
Table 1 Test results for four kinds of falling and five kinds of ADL
Motion typeAlarm timestest times
Proposed designAcceleration
threshold baseddesign
Forward fall 6060 5960Backward fall 5660 5460Leftward fall 5860 5260Rightward fall 5960 5560Walking 060 460Jumping 060 1160Squatting 060 060Sitting 060 960Resting 560 1060
Each kind of motion has been repeated 20 times on eachvolunteer and the detection results of the proposed algorithmand an acceleration threshold based algorithm [13] are listedin Table 1
The sensitivity and specificity [21 22] of the proposedsystem can be got from the test data in Table 1 Sensitivityof the proposed algorithm is 971 and the specificity is983 Test results of acceleration threshold based algorithmshow lower sensitivity and specificity at 916 and 887respectively
Figure 9 shows the accelerations in different kinds offallings which all trigger the fall alarm correctly and thecorresponding rotation angles are 919∘ minus1005∘ 1047∘ andminus1141∘
Figure 10 shows acceleration during activity of lying downand resting which has rotation angle of minus1170∘ and similar
International Journal of Telemedicine and Applications 9
0 05 1 15 2minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2minus10
minus5
0
5
10
15
Time (s)
Acce
lera
tion
(g)
(b)
0 05 1 15 2 25 3 35 4minus2
minus1
0
1
2
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(c)
0 05 1 15 2minus4
minus3
minus2
minus1
0
1
2
3
4
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(d)
Figure 11 Acceleration waveform during ADL (a) Walking (b) Jumping (c) Squatting (d) Sitting
waveform to falling [23] but the peak acceleration is muchlower Fall alarm has not been triggered yet at this situation
Figure 11 shows acceleration during otherADL testsTheyall do not have rotation about 90∘ even some of the peakvalues are quite high so the fall alarm has not been triggered
52 Location Based Service Alarm receiving function oncaregiverrsquos handset has also been tested An alarm SMS (shortmessage service) containing a map URL has been receivedby the handset as shown in Figure 12 when a fall has beendetected Clicking the URL will open a map in Web browseron which the fall location will be displayed accurately asshown in Figure 13
6 Conclusion
This paper developed a fall detection system based on a singletriaxial accelerometer based wearable deviceThere is no spe-cial requirement of the devicersquosmounting orientation becausethe algorithm does not claim the axes of accelerometer to befixed strictly The system has low power consumed hardwaredesign and highly efficient algorithm which could extendthe service time of the wearable device Both the hardwareand software designs are suitable for wearable and outdoorapplication
As normal activity of resting also has similar rotationas falling it may trigger fall alarm when the body hits
10 International Journal of Telemedicine and Applications
Figure 12 Fall alarm SMS which contains fall location URL
Figure 13 Fall location displayed on a Web map
ground heavily So the choice of 119886threshold is quite importantto distinguish falling from heavily lying activity Sufficientsample number collected from subjects with different ageand gender will improve the reliability and robustness of thethreshold Beside these technologies such as SVMand neuralnetwork are considerable to seek out a proper classificationmethod based on the features used in this system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is partially supported by the Open ResearchFund of the Academy of Satellite Application under Grantno 2014 CXJJ-DH 07 the Scientific Research Foundation forthe Returned Overseas Chinese Scholars State EducationMinistry and the Specialized Research Fund for the DoctoralProgram of High Education China
References
[1] M K Karlsson H Magnusson T von Schewelov and BE Rosengren ldquoPrevention of falls in the elderlymdasha reviewrdquoOsteoporosis International vol 24 no 3 pp 747ndash762 2013
[2] T Shany S J Redmond M R Narayanan and N H LovellldquoSensors-based wearable systems for monitoring of humanmovement and fallsrdquo IEEE Sensors Journal vol 12 no 3 pp658ndash670 2012
[3] M Mubashir L Shao and L Seed ldquoA survey on fall detectionprinciples and approachesrdquo Neurocomputing vol 100 pp 144ndash152 2013
[4] M Grassi A Lombardi G Rescio et al ldquoAn integrated systemfor people fall-detection with data fusion capabilities based on3D ToF camera and wireless accelerometerrdquo in Proceedings ofthe 9th IEEE Sensors Conference (SENSORS rsquo10) pp 1016ndash1019Kona Hawaii USA November 2010
[5] A K Bourke K OrsquoDonovan A Clifford et al ldquoOptimumgravity vector and vertical acceleration estimation using a tri-axial accelerometer for falls and normal activitiesrdquo in AnnualInternational Conference of the IEEE Engineering in Medicineand Biology Society (EMBC rsquo11) pp 7896ndash7899 Boston MassUSA 2011
[6] G Anania A Tognetti N Carbonaro et al ldquoDevelopmentof a novel algorithm for human fall detection using wearablesensorsrdquo inProceedings of the IEEE Sensors pp 1336ndash1339 IEEELecce Italy October 2009
[7] L Qiang J A Stankovic M A Hanson A T Barth J Lachand G Zhou ldquoAccurate fast fall detection using gyroscopes andaccelerometer-derived posture informationrdquo in Proceedings ofthe 6th International Workshop on Wearable and ImplantableBody Sensor Networks (BSN rsquo09) pp 138ndash143 Berkeley CalifUSA June 2009
[8] S Sabatelli M Galgani L Fanucci and A Rocchi ldquoA double-stage kalman filter for orientation tracking with an integratedprocessor in 9-D IMUrdquo IEEE Transactions on Instrumentationand Measurement vol 62 no 3 pp 590ndash598 2013
[9] F Bianchi S J RedmondMRNarayanan S Cerutti andNHLovell ldquoBarometric pressure and triaxial accelerometry-basedfalls event detectionrdquo IEEE Transactions on Neural Systems andRehabilitation Engineering vol 18 no 6 pp 619ndash627 2010
[10] S-L Hsieh K-R Chen C-L Yeh et al ldquoAn unfixed-positionsmartphone-based fall detection schemerdquo in Proceedings of theIEEE International Conference on Systems Man and Cybernetics(SMC rsquo14) pp 2077ndash2081 San Diego Calif USA 2014
[11] S D Bersch C M J Chislett D Azzi R Kusainov and JS Briggs ldquoActivity detection using frequency analysis and off-the-shelf devices fall detection from accelerometer datardquo inProceedings of the 5th International Conference on PervasiveComputing Technologies for Healthcare and Workshops (Perva-siveHealth rsquo11) pp 362ndash365 Dublin Ireland May 2011
[12] A H Khandoker D Lai R K Begg and M Palaniswami ldquoAwavelet-based approach for screening falls risk in the elderlyusing support vector machinesrdquo in Proceedings of the 4thInternational Conference on Intelligent Sensing and InformationProcessing (ICISIP rsquo06) pp 184ndash189 Bangalore India Decem-ber 2006
[13] A K Bourke J V OrsquoBrien and G M Lyons ldquoEvaluation ofa threshold-based tri-axial accelerometer fall detection algo-rithmrdquo Gait and Posture vol 26 no 2 pp 194ndash199 2007
International Journal of Telemedicine and Applications 11
[14] T Zhang JWang L Xu et al ldquofall detection by wearable sensorand one-class SVM algorithmrdquo in Intelligent Computing in Sig-nal Processing and Pattern Recognition International Conferenceon Intelligent Computing ICIC 2006 Kunming China August16ndash19 2006 vol 345 of Lecture Notes in Control and InformationSciences pp 858ndash863 Springer Berlin Germany 2006
[15] S Abbate M Avvenuti F Bonatesta G Cola P Corsini and AVecchio ldquoA smartphone-based fall detection systemrdquo Pervasiveand Mobile Computing vol 8 no 6 pp 883ndash899 2012
[16] A M Sabatini ldquoQuaternion-based strap-down integrationmethod for applications of inertial sensing to gait analysisrdquoMedical and Biological Engineering and Computing vol 43 no1 pp 94ndash101 2005
[17] J VinceQuaternions for Computer Graphics Springer LondonUK 2011
[18] J Chen K Karric D Chang et al ldquoWearable sensors for reliablefall detectionrdquo in Proceedings of the 27th Annual InternationalConference of the Engineering in Medicine and Biology Society(EMBS rsquo05) pp 3551ndash3554 Shanghai China 2005
[19] F Wu C Hu H Zhao and Y Zhao ldquoDevelopment of a fallalarm system based onmulti-sensor integrationrdquo in Proceedingsof the 25th International Technical Meeting of the SatelliteDivision of the Institute of Navigation (IONGNSS rsquo12) pp 3805ndash3813 Nashville Tenn USA September 2012
[20] C V C Bouten K T M Koekkoek M Verduin R Koddeand J D Janssen ldquoA triaxial accelerometer and portable dataprocessing unit for the assessment of daily physical activityrdquoIEEE Transactions on Biomedical Engineering vol 44 no 3 pp136ndash147 1997
[21] M Kangas I Vikman JWiklander P Lindgren L Nyberg andT Jamsa ldquoSensitivity and specificity of fall detection in peopleaged 40 years and overrdquo Gait amp Posture vol 29 no 4 pp 571ndash574 2009
[22] P Jantaraprim P Phukpattaranont C Limsakul and BWongkittisuksa ldquoEvaluation of fall detection for the elderly on avariety of subject groupsrdquo in Proceedings of the 3rd InternationalConvention on Rehabilitation Engineering amp Assistive Technol-ogy (ICREATE rsquo09) pp 1ndash4 Singapore April 2009
[23] S Abbate M Avvenuti G Cola et al ldquoRecognition of falsealarms in fall detection systemsrdquo in Consumer Communicationsand Networking Conference (CCNC rsquo11) pp 23ndash28 Las VegasNev USA 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 International Journal of Telemedicine and Applications
GPS
Wearable device
GSM network Receiver terminal
Alarm short message
Figure 1 System architecture
some steel structure architecture or near some objects withstrong electromagnetism As angular information can alsobe extracted from accelerometer measurements a state spacefilter such as the Kalman filter is a commonly used techniqueto combine angular motion information [8] Beside thesesensors such as barometer can also assist puremotion sensorsat human gait recognition [9]
But in fact using more sensors means more powerconsumption and it is a challenge to design a properalgorithm to fuse different kinds of sensors A single triaxialaccelerometer is quite enough for human fall detection assufficient information could be extracted from its measure-ments Besides this the accelerometer coordinate does nothave to be fixed if only themagnitude of sum vector is needed[10] and that is quite convenient for wearable application Inthis paper a fall detection system based on a wearable deviceis developed The hardware and software realization of thedevice is mainly based on a single triaxial accelerometer andGPSGSMmodule The device uses an efficient fall detectionalgorithm with less resource and power consumption whichmeans that it is a proper design for outdoor application
2 System Design
The architecture of the developed system is described inFigure 1 A wearable device is placed on humanrsquos waist Thesystem can detect the elderlyrsquos falling by acceleration analysisThen it will get the elderlyrsquos geographic position and sendfall alarm short message to caregivers So the elderly who hasfallen can get timely help to minimize the negative influence
3 Fall Detection Algorithm
31 Overview Choice of recognition feature has decisivesignificance to successful fall detection Information likelinear movements (eg displacement velocity and acceler-ation) and angular movements (eg angle angular veloc-ity and angular acceleration) could be obtained directlyor indirectly Beside these frequency domain parameterscould be extracted from basic sensor measurements bytechniques such as FFT andwavelet [11 12] For single triaxialaccelerometer application accelerations and derived angularparameters could be used as recognition features
Fall detection algorithm design is based on the choice ofrecognition features According to the recognition feature
fall detection algorithms are classified as threshold basedand machine learning based For threshold based methodthreshold of recognition feature is set by the designer beforeapplication which makes the algorithm have rapid responseand less resource consumption [13] But the choice of thresh-old needs both rigorous schemes and adequate experimentsFor machine learning based design the classification offall and normal activities is available with the assistance oftechnologies such as support vector machine (SVM) andneural network [14 15] Machine learning assistance mayenhance system robustness to some extent but its algorithmdesign is always high computing resource consumed whichlimits its application in wearable device As the compactwearable device requires low power consumption and a singletriaxial accelerometer could provide effective informationthreshold based fall detection algorithm will be used in thissystem
32 Algorithm Design Algorithm used in this fall alarmsystem is based on thresholds of sum acceleration and rota-tion angle information When a real fall happens collisionbetween humanrsquos body and groundwill produce obvious peakvalue at the sum acceleration a which has magnitude as
|a| = radic119886119909
2 + 119886119910
2 + 119886119911
2 (1)
where 119886119909 119886119910 and 119886
119911present accelerometer measurements of
three axes The system uses the sum acceleration as the firststep to distinguish high intensity movements from othersBut normal motions such as jumping or sitting also producepeak values which mean that additional detection featuresare required
The second feature used here is an angle calculated basedon acceleration measurements As humanrsquos motion has lowacceleration it is feasible to get gravity component in eachaxis by using a low pass filter If gravity components could beseparated before and after humanrsquos fall then it is possible tocalculate the rotation angle of accelerometer coordinate in 3Dspace which is also equivalent to the rotation angle of gravityvector relative to fixed coordinate Coordinate constructed bythe accelerometer and the gravity vector is shown in Figure 2The rotation of gravity vector in fixed coordinate is shown inFigure 3
International Journal of Telemedicine and Applications 3
g
Z
YX
(a)
g
ZY
X
(b)
Figure 2 Coordinate and gravity before and after falling (a) Before falling (b) After falling
gbefore
gafter
120579
Z
XY
Figure 3 Rotation of gravity relative to fixed coordinate
Quaternion is an effective tool to describe rotationmove-ment in humanrsquos gait change which also includes falling [16]A quaternion could be described as
Q = 1199020+ 1199021sdot 119894 + 119902
2sdot 119895 + 119902
3sdot 119896 (2)
which has magnitude as
Q = radic1199020
2 + 1199021
2 + 1199022
2 + 1199023
2 (3)
Unit quaternion which has magnitude Q = 1 can bedescribed as
Q = cos 1205792+ sin 1205792sdot 119902119909sdot 119894 + sin 120579
2sdot 119902119910sdot 119895 + sin 120579
2sdot 119902119911sdot 119896 (4)
As shown in Figure 3 rotation angle of Q equals 120579The rotation axis is orthogonal to the rotation plane and
its direction is in accordance with right hand screw rule119902119909 119902119910 and 119902
119911are three components of the unit vector
which describes the orientation of the quaternion at the fixedcoordinate
Besides rotationmovement quaternion can also describea vector in 3D space such as the gravity vector g which couldbe described as a quaternion
g = 0 + 119892119909sdot 119894 + 119892
119910sdot 119895 + 119892
119911sdot 119896 (5)
119892119909 119892119910 and 119892
119911are three components of g which has quater-
nion magnitude as1003817100381710038171003817g1003817100381710038171003817 = radic119892
2
119909+ 1198922119910+ 1198922119911= 119892 (6)
A unit quaternion Q is used to describe humanrsquos fallingmovement which can also be divided into three rotationquaternions Q
1 Q2 and Q
3to simplify the calculation as
shown in Figure 4With the help of gravity vector information before and
after humanrsquos falling movement as shown in Figure 3 thesethree separated quaternions are all available
Q1could be expressed as
Q1= cos 12057912+ sin 12057912sin120572 sdot 119894 + sin 1205791
2cos120572 sdot 119895 (7)
which has rotation angle and rotation axis information as
1205791= arctan
119892before119911
radic1198922before119909 + 1198922
before119910
sin120572 =minus119892before119910
radic1198922before119909 + 1198922
before119910
cos120572 =119892before119909
radic1198922before119909 + 1198922
before119910
(8)
4 International Journal of Telemedicine and Applications
Z
Y
X
1205791
(a)
Z
Y
X
1205792
(b)
Z
Y
X
1205793
(c)
Figure 4 Decomposition of fall rotation quaternion Q (a) QuaternionQ1 (b) Quaternion Q
2 (c) Quaternion Q
3
QuaternionQ2can be calculated as
Q2= cos 12057922+ sin 12057922sdot 119896 (9)
which has rotation angle as
1205792= arctan 2
119892after119910
119892after119909minus arctan 2
119892before119910
119892before119909 (10)
QuaternionQ3is
Q3= cos1205793
2+ sin1205793
2sin120573 sdot 119894 + sin
1205793
2cos120573 sdot 119895 (11)
with rotation angle and rotation axis information as
1205793= minus arctan
119892after119911
radic1198922after119909 + 1198922
after119910
sin120573 =minus119892after119910
radic1198922after119909 + 1198922
after119910
cos120573 =119892after119909
radic1198922after119909 + 1198922
after119910
(12)
Then the rotation of the fall movement can be expressedby quaternion multiplication as
gafter = Q otimes gbefore otimesQlowast
= Q3otimesQ2otimesQ1otimes gbefore otimesQ
lowast
1otimesQlowast2otimesQlowast3
(13)
whereQlowast = 1199020minus1199021sdot 119894minus1199022sdot119895minus1199023sdot119896 is the conjugate quaternion
of Q Quaternion algebra is normally implemented basedon basic matrix algebra [17] Quaternion multiplication usedabove could be realized by matrix multiplication as
Q otimes gbefore = M (Q)[[[[[
[
0
119892before119909
119892before119910
119892before119911
]]]]]
]
=
[[[[[
[
1199020minus1199021minus1199022minus1199023
11990211199020minus11990231199022
119902211990231199020minus1199021
1199023minus119902211990211199020
]]]]]
]
[[[[[
[
0
119892before119909
119892before119910
119892before119911
]]]]]
]
(14)
International Journal of Telemedicine and Applications 5
Accelerationacquisition
Regard asfalling
Impact state
and
Record a as gbeforewhile standing
|a| lt athreshold
|a| ge athresholdt ge tthreshold
t lt tthreshold|a| ≉ g
t ge tthreshold and |a| asymp g
Lying staterecord a as gafter
calculate 120579|120579| ≉ 90∘
|120579| asymp 90∘
Figure 5 Fall detection algorithm state machine
Power managerunit
AccelerometerADXL345
I2C
33V
MicrocontrollerMSP430F1611
USART
USART
GPSantenna
Gps
module
module
SIM908
GSM
GSMantenna
Figure 6 Basic hardware structure
The whole rotation quaternion can also be decomposedas
Q = Q3otimesQ2otimesQ1
= M (Q3)M (Q
2)Q1
(15)
Q1Q2 andQ
3are all available based on gravity information
before and after the falling movement At last it is possible to
get four elements of quaternionQ by the equation above andthe rotation angle 120579 could be calculated as
120579 = 2 sdot arctan(radic1199021
2 + 1199022
2 + 1199023
2
1199020
) (16)
6 International Journal of Telemedicine and Applications
GPS antenna MSP430F1611 ADXL345Top
SIM908 GSM antennaBottom
4000mm5000
mm
Figure 7 PCB board prototype
Yes
Yes
No
No
Record gbeforewhile standing
Fall detectionalgorithm
Get position andsend alarm SMS
Falling
Withdraw alarm
Remind the elderly
Inform caregiversthrough SMS
Figure 8 System software flow diagram
When an object is falling magnitude of 120579 will approach90∘ which is also a character different from most normalactivities So it could be used as the second detection featurebeside sum acceleration
The flow chart of the proposed algorithm is depicted inFigure 5
The wearable device will be mounted on humanrsquos waistat first to reflect the motion of human body closely [18] andthe device will record gbefore while the elderly is standing
stillThere is no special requirement of the device orientationbut only keep stationary during the wear 119886threshold means thethreshold of sum acceleration magnitude and 119905threshold meansthe threshold of oscillation time duration after the break of119886threshold
When measurements in three different axes have beenacquired the sum acceleration |a| will be calculated Whena real fall happens sum acceleration will reach peak value of|a| ge 119886threshold In a real falling the fluctuation of acceleration
International Journal of Telemedicine and Applications 7
0 05 1 15 2 25 3minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
Time (s)
Acce
lera
tion
(g)
(b)
05 1 15 2 25 3 35minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(c)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
8
9
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(d)
Figure 9 Acceleration waveforms during fall (a) Forward fall (b) Backward fall (c) Leftward fall (d) Rightward fall
will stop in time duration 119905threshold and then the sum accel-eration is |a| asymp 119892 as the elderly will lie on the ground Thenthe acceleration a is recorded as gafter Quaternion rotation 120579will be calculated based on information gbefore and gafter Atlast the system will consider it as a fall if the rotation angle|120579| asymp 90
∘
4 Implementation
41 Hardware ADIrsquos digital triaxial accelerometer ADXL345is themotion sensor used in this systemTheGPS service andGSM communication function are integrated in SIMComrsquos
SIM908 module TIrsquos 16 bits MCU MSP430F1611 is used tocontrol the whole system and imply the detection algorithm[19]
The measurement range of accelerometer could be set atplusmn2 g plusmn4 g plusmn8 g or plusmn16 g and the maximal sampling rate is32 kHz As humanrsquos activities are normally at low frequencybands [20] 100Hz is a proper sampling rate for human falldetection There is an inner digital filter in ADXL345 whichcould weaken noise and reduce the burden of digital signalprocessing inMCU to some extentThemeasurementswill besent through IIC (interintegrated circuit) bus communicationbetween the sensor and the MCU
8 International Journal of Telemedicine and Applications
SIM908 can offer GPS and GSM service on serial portcommunicationwithMCU and it can also work in low powermode
Each hardware component of the wearable device isworking under low voltage and the detection algorithmdoes not need complex calculation resource so the powerconsumption of the whole device is quite low A 1200mAh37 V polymer lithium battery is quite enough to provide theneed of the wearable device for a couple of days
Hardware structure of the detection device is shown inFigure 6 and the PCB board prototype is shown in Figure 7
42 Software The software design of the system can bedivided into two parts One of them is the software designin wearable device and the other is in the caregiverrsquos handset
421 Wearable Device Flow diagram of the wearable devicesoftware is shown in Figure 8
After initialization of the system gbefore would beextracted from acceleration measurements by using a lowpass filter when the elderly is standing After that the falldetection algorithmwill be applied If a fall has been detectedthe wearable device will locate the user and send alarmshort message to caregivers immediatelyThen the device willremind the elderly through vibration If the user withdrawsthe alarm by pressing a button manually the device will getback to fall detection state and a short message will be sent toinform the caregivers
422 Caregiverrsquos Handset There is aURL (universal resourcelocator) which links to a webmap in the alarm shortmessageThe fall location information will be highlighted on a webmap when the caregiver opens this link
5 System Test
System test of the fall detection system has been conductedbased on the system design described above
51 Wearable Device and Fall Detection Algorithm Thesampling rate of accelerometer is set at 100Hz and themeasurement range is plusmn16 g with a maximum precision of4mg MCU will read raw measurements from sensorrsquos innerFIFO and apply the detection algorithm
The test objects are three different volunteers at the agesof 23 42 and 60 respectively Based on analysis of thesevolunteersrsquo experiment data 119886threshold and 119905threshold are set as2 g and 2 s respectively In order to get g when standing andlying after the fall sum acceleration a which has magnitudebetween (1minus03) g and (1+03) g will be considered as gbeforeand gafter Considering that the tilt of the ground or the lyingposture of the elderly may affect the rotation angle rotationangle 120579 between (90 minus 30)∘ and (90 + 30)∘ will infer that theelderly has fallen
System test contains five kinds of activities of daily living(ie walking jumping squatting sitting and resting) andfour kinds of fallings (ie forward backward leftward andrightward)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
Figure 10 Resting
Table 1 Test results for four kinds of falling and five kinds of ADL
Motion typeAlarm timestest times
Proposed designAcceleration
threshold baseddesign
Forward fall 6060 5960Backward fall 5660 5460Leftward fall 5860 5260Rightward fall 5960 5560Walking 060 460Jumping 060 1160Squatting 060 060Sitting 060 960Resting 560 1060
Each kind of motion has been repeated 20 times on eachvolunteer and the detection results of the proposed algorithmand an acceleration threshold based algorithm [13] are listedin Table 1
The sensitivity and specificity [21 22] of the proposedsystem can be got from the test data in Table 1 Sensitivityof the proposed algorithm is 971 and the specificity is983 Test results of acceleration threshold based algorithmshow lower sensitivity and specificity at 916 and 887respectively
Figure 9 shows the accelerations in different kinds offallings which all trigger the fall alarm correctly and thecorresponding rotation angles are 919∘ minus1005∘ 1047∘ andminus1141∘
Figure 10 shows acceleration during activity of lying downand resting which has rotation angle of minus1170∘ and similar
International Journal of Telemedicine and Applications 9
0 05 1 15 2minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2minus10
minus5
0
5
10
15
Time (s)
Acce
lera
tion
(g)
(b)
0 05 1 15 2 25 3 35 4minus2
minus1
0
1
2
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(c)
0 05 1 15 2minus4
minus3
minus2
minus1
0
1
2
3
4
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(d)
Figure 11 Acceleration waveform during ADL (a) Walking (b) Jumping (c) Squatting (d) Sitting
waveform to falling [23] but the peak acceleration is muchlower Fall alarm has not been triggered yet at this situation
Figure 11 shows acceleration during otherADL testsTheyall do not have rotation about 90∘ even some of the peakvalues are quite high so the fall alarm has not been triggered
52 Location Based Service Alarm receiving function oncaregiverrsquos handset has also been tested An alarm SMS (shortmessage service) containing a map URL has been receivedby the handset as shown in Figure 12 when a fall has beendetected Clicking the URL will open a map in Web browseron which the fall location will be displayed accurately asshown in Figure 13
6 Conclusion
This paper developed a fall detection system based on a singletriaxial accelerometer based wearable deviceThere is no spe-cial requirement of the devicersquosmounting orientation becausethe algorithm does not claim the axes of accelerometer to befixed strictly The system has low power consumed hardwaredesign and highly efficient algorithm which could extendthe service time of the wearable device Both the hardwareand software designs are suitable for wearable and outdoorapplication
As normal activity of resting also has similar rotationas falling it may trigger fall alarm when the body hits
10 International Journal of Telemedicine and Applications
Figure 12 Fall alarm SMS which contains fall location URL
Figure 13 Fall location displayed on a Web map
ground heavily So the choice of 119886threshold is quite importantto distinguish falling from heavily lying activity Sufficientsample number collected from subjects with different ageand gender will improve the reliability and robustness of thethreshold Beside these technologies such as SVMand neuralnetwork are considerable to seek out a proper classificationmethod based on the features used in this system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is partially supported by the Open ResearchFund of the Academy of Satellite Application under Grantno 2014 CXJJ-DH 07 the Scientific Research Foundation forthe Returned Overseas Chinese Scholars State EducationMinistry and the Specialized Research Fund for the DoctoralProgram of High Education China
References
[1] M K Karlsson H Magnusson T von Schewelov and BE Rosengren ldquoPrevention of falls in the elderlymdasha reviewrdquoOsteoporosis International vol 24 no 3 pp 747ndash762 2013
[2] T Shany S J Redmond M R Narayanan and N H LovellldquoSensors-based wearable systems for monitoring of humanmovement and fallsrdquo IEEE Sensors Journal vol 12 no 3 pp658ndash670 2012
[3] M Mubashir L Shao and L Seed ldquoA survey on fall detectionprinciples and approachesrdquo Neurocomputing vol 100 pp 144ndash152 2013
[4] M Grassi A Lombardi G Rescio et al ldquoAn integrated systemfor people fall-detection with data fusion capabilities based on3D ToF camera and wireless accelerometerrdquo in Proceedings ofthe 9th IEEE Sensors Conference (SENSORS rsquo10) pp 1016ndash1019Kona Hawaii USA November 2010
[5] A K Bourke K OrsquoDonovan A Clifford et al ldquoOptimumgravity vector and vertical acceleration estimation using a tri-axial accelerometer for falls and normal activitiesrdquo in AnnualInternational Conference of the IEEE Engineering in Medicineand Biology Society (EMBC rsquo11) pp 7896ndash7899 Boston MassUSA 2011
[6] G Anania A Tognetti N Carbonaro et al ldquoDevelopmentof a novel algorithm for human fall detection using wearablesensorsrdquo inProceedings of the IEEE Sensors pp 1336ndash1339 IEEELecce Italy October 2009
[7] L Qiang J A Stankovic M A Hanson A T Barth J Lachand G Zhou ldquoAccurate fast fall detection using gyroscopes andaccelerometer-derived posture informationrdquo in Proceedings ofthe 6th International Workshop on Wearable and ImplantableBody Sensor Networks (BSN rsquo09) pp 138ndash143 Berkeley CalifUSA June 2009
[8] S Sabatelli M Galgani L Fanucci and A Rocchi ldquoA double-stage kalman filter for orientation tracking with an integratedprocessor in 9-D IMUrdquo IEEE Transactions on Instrumentationand Measurement vol 62 no 3 pp 590ndash598 2013
[9] F Bianchi S J RedmondMRNarayanan S Cerutti andNHLovell ldquoBarometric pressure and triaxial accelerometry-basedfalls event detectionrdquo IEEE Transactions on Neural Systems andRehabilitation Engineering vol 18 no 6 pp 619ndash627 2010
[10] S-L Hsieh K-R Chen C-L Yeh et al ldquoAn unfixed-positionsmartphone-based fall detection schemerdquo in Proceedings of theIEEE International Conference on Systems Man and Cybernetics(SMC rsquo14) pp 2077ndash2081 San Diego Calif USA 2014
[11] S D Bersch C M J Chislett D Azzi R Kusainov and JS Briggs ldquoActivity detection using frequency analysis and off-the-shelf devices fall detection from accelerometer datardquo inProceedings of the 5th International Conference on PervasiveComputing Technologies for Healthcare and Workshops (Perva-siveHealth rsquo11) pp 362ndash365 Dublin Ireland May 2011
[12] A H Khandoker D Lai R K Begg and M Palaniswami ldquoAwavelet-based approach for screening falls risk in the elderlyusing support vector machinesrdquo in Proceedings of the 4thInternational Conference on Intelligent Sensing and InformationProcessing (ICISIP rsquo06) pp 184ndash189 Bangalore India Decem-ber 2006
[13] A K Bourke J V OrsquoBrien and G M Lyons ldquoEvaluation ofa threshold-based tri-axial accelerometer fall detection algo-rithmrdquo Gait and Posture vol 26 no 2 pp 194ndash199 2007
International Journal of Telemedicine and Applications 11
[14] T Zhang JWang L Xu et al ldquofall detection by wearable sensorand one-class SVM algorithmrdquo in Intelligent Computing in Sig-nal Processing and Pattern Recognition International Conferenceon Intelligent Computing ICIC 2006 Kunming China August16ndash19 2006 vol 345 of Lecture Notes in Control and InformationSciences pp 858ndash863 Springer Berlin Germany 2006
[15] S Abbate M Avvenuti F Bonatesta G Cola P Corsini and AVecchio ldquoA smartphone-based fall detection systemrdquo Pervasiveand Mobile Computing vol 8 no 6 pp 883ndash899 2012
[16] A M Sabatini ldquoQuaternion-based strap-down integrationmethod for applications of inertial sensing to gait analysisrdquoMedical and Biological Engineering and Computing vol 43 no1 pp 94ndash101 2005
[17] J VinceQuaternions for Computer Graphics Springer LondonUK 2011
[18] J Chen K Karric D Chang et al ldquoWearable sensors for reliablefall detectionrdquo in Proceedings of the 27th Annual InternationalConference of the Engineering in Medicine and Biology Society(EMBS rsquo05) pp 3551ndash3554 Shanghai China 2005
[19] F Wu C Hu H Zhao and Y Zhao ldquoDevelopment of a fallalarm system based onmulti-sensor integrationrdquo in Proceedingsof the 25th International Technical Meeting of the SatelliteDivision of the Institute of Navigation (IONGNSS rsquo12) pp 3805ndash3813 Nashville Tenn USA September 2012
[20] C V C Bouten K T M Koekkoek M Verduin R Koddeand J D Janssen ldquoA triaxial accelerometer and portable dataprocessing unit for the assessment of daily physical activityrdquoIEEE Transactions on Biomedical Engineering vol 44 no 3 pp136ndash147 1997
[21] M Kangas I Vikman JWiklander P Lindgren L Nyberg andT Jamsa ldquoSensitivity and specificity of fall detection in peopleaged 40 years and overrdquo Gait amp Posture vol 29 no 4 pp 571ndash574 2009
[22] P Jantaraprim P Phukpattaranont C Limsakul and BWongkittisuksa ldquoEvaluation of fall detection for the elderly on avariety of subject groupsrdquo in Proceedings of the 3rd InternationalConvention on Rehabilitation Engineering amp Assistive Technol-ogy (ICREATE rsquo09) pp 1ndash4 Singapore April 2009
[23] S Abbate M Avvenuti G Cola et al ldquoRecognition of falsealarms in fall detection systemsrdquo in Consumer Communicationsand Networking Conference (CCNC rsquo11) pp 23ndash28 Las VegasNev USA 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
International Journal of Telemedicine and Applications 3
g
Z
YX
(a)
g
ZY
X
(b)
Figure 2 Coordinate and gravity before and after falling (a) Before falling (b) After falling
gbefore
gafter
120579
Z
XY
Figure 3 Rotation of gravity relative to fixed coordinate
Quaternion is an effective tool to describe rotationmove-ment in humanrsquos gait change which also includes falling [16]A quaternion could be described as
Q = 1199020+ 1199021sdot 119894 + 119902
2sdot 119895 + 119902
3sdot 119896 (2)
which has magnitude as
Q = radic1199020
2 + 1199021
2 + 1199022
2 + 1199023
2 (3)
Unit quaternion which has magnitude Q = 1 can bedescribed as
Q = cos 1205792+ sin 1205792sdot 119902119909sdot 119894 + sin 120579
2sdot 119902119910sdot 119895 + sin 120579
2sdot 119902119911sdot 119896 (4)
As shown in Figure 3 rotation angle of Q equals 120579The rotation axis is orthogonal to the rotation plane and
its direction is in accordance with right hand screw rule119902119909 119902119910 and 119902
119911are three components of the unit vector
which describes the orientation of the quaternion at the fixedcoordinate
Besides rotationmovement quaternion can also describea vector in 3D space such as the gravity vector g which couldbe described as a quaternion
g = 0 + 119892119909sdot 119894 + 119892
119910sdot 119895 + 119892
119911sdot 119896 (5)
119892119909 119892119910 and 119892
119911are three components of g which has quater-
nion magnitude as1003817100381710038171003817g1003817100381710038171003817 = radic119892
2
119909+ 1198922119910+ 1198922119911= 119892 (6)
A unit quaternion Q is used to describe humanrsquos fallingmovement which can also be divided into three rotationquaternions Q
1 Q2 and Q
3to simplify the calculation as
shown in Figure 4With the help of gravity vector information before and
after humanrsquos falling movement as shown in Figure 3 thesethree separated quaternions are all available
Q1could be expressed as
Q1= cos 12057912+ sin 12057912sin120572 sdot 119894 + sin 1205791
2cos120572 sdot 119895 (7)
which has rotation angle and rotation axis information as
1205791= arctan
119892before119911
radic1198922before119909 + 1198922
before119910
sin120572 =minus119892before119910
radic1198922before119909 + 1198922
before119910
cos120572 =119892before119909
radic1198922before119909 + 1198922
before119910
(8)
4 International Journal of Telemedicine and Applications
Z
Y
X
1205791
(a)
Z
Y
X
1205792
(b)
Z
Y
X
1205793
(c)
Figure 4 Decomposition of fall rotation quaternion Q (a) QuaternionQ1 (b) Quaternion Q
2 (c) Quaternion Q
3
QuaternionQ2can be calculated as
Q2= cos 12057922+ sin 12057922sdot 119896 (9)
which has rotation angle as
1205792= arctan 2
119892after119910
119892after119909minus arctan 2
119892before119910
119892before119909 (10)
QuaternionQ3is
Q3= cos1205793
2+ sin1205793
2sin120573 sdot 119894 + sin
1205793
2cos120573 sdot 119895 (11)
with rotation angle and rotation axis information as
1205793= minus arctan
119892after119911
radic1198922after119909 + 1198922
after119910
sin120573 =minus119892after119910
radic1198922after119909 + 1198922
after119910
cos120573 =119892after119909
radic1198922after119909 + 1198922
after119910
(12)
Then the rotation of the fall movement can be expressedby quaternion multiplication as
gafter = Q otimes gbefore otimesQlowast
= Q3otimesQ2otimesQ1otimes gbefore otimesQ
lowast
1otimesQlowast2otimesQlowast3
(13)
whereQlowast = 1199020minus1199021sdot 119894minus1199022sdot119895minus1199023sdot119896 is the conjugate quaternion
of Q Quaternion algebra is normally implemented basedon basic matrix algebra [17] Quaternion multiplication usedabove could be realized by matrix multiplication as
Q otimes gbefore = M (Q)[[[[[
[
0
119892before119909
119892before119910
119892before119911
]]]]]
]
=
[[[[[
[
1199020minus1199021minus1199022minus1199023
11990211199020minus11990231199022
119902211990231199020minus1199021
1199023minus119902211990211199020
]]]]]
]
[[[[[
[
0
119892before119909
119892before119910
119892before119911
]]]]]
]
(14)
International Journal of Telemedicine and Applications 5
Accelerationacquisition
Regard asfalling
Impact state
and
Record a as gbeforewhile standing
|a| lt athreshold
|a| ge athresholdt ge tthreshold
t lt tthreshold|a| ≉ g
t ge tthreshold and |a| asymp g
Lying staterecord a as gafter
calculate 120579|120579| ≉ 90∘
|120579| asymp 90∘
Figure 5 Fall detection algorithm state machine
Power managerunit
AccelerometerADXL345
I2C
33V
MicrocontrollerMSP430F1611
USART
USART
GPSantenna
Gps
module
module
SIM908
GSM
GSMantenna
Figure 6 Basic hardware structure
The whole rotation quaternion can also be decomposedas
Q = Q3otimesQ2otimesQ1
= M (Q3)M (Q
2)Q1
(15)
Q1Q2 andQ
3are all available based on gravity information
before and after the falling movement At last it is possible to
get four elements of quaternionQ by the equation above andthe rotation angle 120579 could be calculated as
120579 = 2 sdot arctan(radic1199021
2 + 1199022
2 + 1199023
2
1199020
) (16)
6 International Journal of Telemedicine and Applications
GPS antenna MSP430F1611 ADXL345Top
SIM908 GSM antennaBottom
4000mm5000
mm
Figure 7 PCB board prototype
Yes
Yes
No
No
Record gbeforewhile standing
Fall detectionalgorithm
Get position andsend alarm SMS
Falling
Withdraw alarm
Remind the elderly
Inform caregiversthrough SMS
Figure 8 System software flow diagram
When an object is falling magnitude of 120579 will approach90∘ which is also a character different from most normalactivities So it could be used as the second detection featurebeside sum acceleration
The flow chart of the proposed algorithm is depicted inFigure 5
The wearable device will be mounted on humanrsquos waistat first to reflect the motion of human body closely [18] andthe device will record gbefore while the elderly is standing
stillThere is no special requirement of the device orientationbut only keep stationary during the wear 119886threshold means thethreshold of sum acceleration magnitude and 119905threshold meansthe threshold of oscillation time duration after the break of119886threshold
When measurements in three different axes have beenacquired the sum acceleration |a| will be calculated Whena real fall happens sum acceleration will reach peak value of|a| ge 119886threshold In a real falling the fluctuation of acceleration
International Journal of Telemedicine and Applications 7
0 05 1 15 2 25 3minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
Time (s)
Acce
lera
tion
(g)
(b)
05 1 15 2 25 3 35minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(c)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
8
9
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(d)
Figure 9 Acceleration waveforms during fall (a) Forward fall (b) Backward fall (c) Leftward fall (d) Rightward fall
will stop in time duration 119905threshold and then the sum accel-eration is |a| asymp 119892 as the elderly will lie on the ground Thenthe acceleration a is recorded as gafter Quaternion rotation 120579will be calculated based on information gbefore and gafter Atlast the system will consider it as a fall if the rotation angle|120579| asymp 90
∘
4 Implementation
41 Hardware ADIrsquos digital triaxial accelerometer ADXL345is themotion sensor used in this systemTheGPS service andGSM communication function are integrated in SIMComrsquos
SIM908 module TIrsquos 16 bits MCU MSP430F1611 is used tocontrol the whole system and imply the detection algorithm[19]
The measurement range of accelerometer could be set atplusmn2 g plusmn4 g plusmn8 g or plusmn16 g and the maximal sampling rate is32 kHz As humanrsquos activities are normally at low frequencybands [20] 100Hz is a proper sampling rate for human falldetection There is an inner digital filter in ADXL345 whichcould weaken noise and reduce the burden of digital signalprocessing inMCU to some extentThemeasurementswill besent through IIC (interintegrated circuit) bus communicationbetween the sensor and the MCU
8 International Journal of Telemedicine and Applications
SIM908 can offer GPS and GSM service on serial portcommunicationwithMCU and it can also work in low powermode
Each hardware component of the wearable device isworking under low voltage and the detection algorithmdoes not need complex calculation resource so the powerconsumption of the whole device is quite low A 1200mAh37 V polymer lithium battery is quite enough to provide theneed of the wearable device for a couple of days
Hardware structure of the detection device is shown inFigure 6 and the PCB board prototype is shown in Figure 7
42 Software The software design of the system can bedivided into two parts One of them is the software designin wearable device and the other is in the caregiverrsquos handset
421 Wearable Device Flow diagram of the wearable devicesoftware is shown in Figure 8
After initialization of the system gbefore would beextracted from acceleration measurements by using a lowpass filter when the elderly is standing After that the falldetection algorithmwill be applied If a fall has been detectedthe wearable device will locate the user and send alarmshort message to caregivers immediatelyThen the device willremind the elderly through vibration If the user withdrawsthe alarm by pressing a button manually the device will getback to fall detection state and a short message will be sent toinform the caregivers
422 Caregiverrsquos Handset There is aURL (universal resourcelocator) which links to a webmap in the alarm shortmessageThe fall location information will be highlighted on a webmap when the caregiver opens this link
5 System Test
System test of the fall detection system has been conductedbased on the system design described above
51 Wearable Device and Fall Detection Algorithm Thesampling rate of accelerometer is set at 100Hz and themeasurement range is plusmn16 g with a maximum precision of4mg MCU will read raw measurements from sensorrsquos innerFIFO and apply the detection algorithm
The test objects are three different volunteers at the agesof 23 42 and 60 respectively Based on analysis of thesevolunteersrsquo experiment data 119886threshold and 119905threshold are set as2 g and 2 s respectively In order to get g when standing andlying after the fall sum acceleration a which has magnitudebetween (1minus03) g and (1+03) g will be considered as gbeforeand gafter Considering that the tilt of the ground or the lyingposture of the elderly may affect the rotation angle rotationangle 120579 between (90 minus 30)∘ and (90 + 30)∘ will infer that theelderly has fallen
System test contains five kinds of activities of daily living(ie walking jumping squatting sitting and resting) andfour kinds of fallings (ie forward backward leftward andrightward)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
Figure 10 Resting
Table 1 Test results for four kinds of falling and five kinds of ADL
Motion typeAlarm timestest times
Proposed designAcceleration
threshold baseddesign
Forward fall 6060 5960Backward fall 5660 5460Leftward fall 5860 5260Rightward fall 5960 5560Walking 060 460Jumping 060 1160Squatting 060 060Sitting 060 960Resting 560 1060
Each kind of motion has been repeated 20 times on eachvolunteer and the detection results of the proposed algorithmand an acceleration threshold based algorithm [13] are listedin Table 1
The sensitivity and specificity [21 22] of the proposedsystem can be got from the test data in Table 1 Sensitivityof the proposed algorithm is 971 and the specificity is983 Test results of acceleration threshold based algorithmshow lower sensitivity and specificity at 916 and 887respectively
Figure 9 shows the accelerations in different kinds offallings which all trigger the fall alarm correctly and thecorresponding rotation angles are 919∘ minus1005∘ 1047∘ andminus1141∘
Figure 10 shows acceleration during activity of lying downand resting which has rotation angle of minus1170∘ and similar
International Journal of Telemedicine and Applications 9
0 05 1 15 2minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2minus10
minus5
0
5
10
15
Time (s)
Acce
lera
tion
(g)
(b)
0 05 1 15 2 25 3 35 4minus2
minus1
0
1
2
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(c)
0 05 1 15 2minus4
minus3
minus2
minus1
0
1
2
3
4
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(d)
Figure 11 Acceleration waveform during ADL (a) Walking (b) Jumping (c) Squatting (d) Sitting
waveform to falling [23] but the peak acceleration is muchlower Fall alarm has not been triggered yet at this situation
Figure 11 shows acceleration during otherADL testsTheyall do not have rotation about 90∘ even some of the peakvalues are quite high so the fall alarm has not been triggered
52 Location Based Service Alarm receiving function oncaregiverrsquos handset has also been tested An alarm SMS (shortmessage service) containing a map URL has been receivedby the handset as shown in Figure 12 when a fall has beendetected Clicking the URL will open a map in Web browseron which the fall location will be displayed accurately asshown in Figure 13
6 Conclusion
This paper developed a fall detection system based on a singletriaxial accelerometer based wearable deviceThere is no spe-cial requirement of the devicersquosmounting orientation becausethe algorithm does not claim the axes of accelerometer to befixed strictly The system has low power consumed hardwaredesign and highly efficient algorithm which could extendthe service time of the wearable device Both the hardwareand software designs are suitable for wearable and outdoorapplication
As normal activity of resting also has similar rotationas falling it may trigger fall alarm when the body hits
10 International Journal of Telemedicine and Applications
Figure 12 Fall alarm SMS which contains fall location URL
Figure 13 Fall location displayed on a Web map
ground heavily So the choice of 119886threshold is quite importantto distinguish falling from heavily lying activity Sufficientsample number collected from subjects with different ageand gender will improve the reliability and robustness of thethreshold Beside these technologies such as SVMand neuralnetwork are considerable to seek out a proper classificationmethod based on the features used in this system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is partially supported by the Open ResearchFund of the Academy of Satellite Application under Grantno 2014 CXJJ-DH 07 the Scientific Research Foundation forthe Returned Overseas Chinese Scholars State EducationMinistry and the Specialized Research Fund for the DoctoralProgram of High Education China
References
[1] M K Karlsson H Magnusson T von Schewelov and BE Rosengren ldquoPrevention of falls in the elderlymdasha reviewrdquoOsteoporosis International vol 24 no 3 pp 747ndash762 2013
[2] T Shany S J Redmond M R Narayanan and N H LovellldquoSensors-based wearable systems for monitoring of humanmovement and fallsrdquo IEEE Sensors Journal vol 12 no 3 pp658ndash670 2012
[3] M Mubashir L Shao and L Seed ldquoA survey on fall detectionprinciples and approachesrdquo Neurocomputing vol 100 pp 144ndash152 2013
[4] M Grassi A Lombardi G Rescio et al ldquoAn integrated systemfor people fall-detection with data fusion capabilities based on3D ToF camera and wireless accelerometerrdquo in Proceedings ofthe 9th IEEE Sensors Conference (SENSORS rsquo10) pp 1016ndash1019Kona Hawaii USA November 2010
[5] A K Bourke K OrsquoDonovan A Clifford et al ldquoOptimumgravity vector and vertical acceleration estimation using a tri-axial accelerometer for falls and normal activitiesrdquo in AnnualInternational Conference of the IEEE Engineering in Medicineand Biology Society (EMBC rsquo11) pp 7896ndash7899 Boston MassUSA 2011
[6] G Anania A Tognetti N Carbonaro et al ldquoDevelopmentof a novel algorithm for human fall detection using wearablesensorsrdquo inProceedings of the IEEE Sensors pp 1336ndash1339 IEEELecce Italy October 2009
[7] L Qiang J A Stankovic M A Hanson A T Barth J Lachand G Zhou ldquoAccurate fast fall detection using gyroscopes andaccelerometer-derived posture informationrdquo in Proceedings ofthe 6th International Workshop on Wearable and ImplantableBody Sensor Networks (BSN rsquo09) pp 138ndash143 Berkeley CalifUSA June 2009
[8] S Sabatelli M Galgani L Fanucci and A Rocchi ldquoA double-stage kalman filter for orientation tracking with an integratedprocessor in 9-D IMUrdquo IEEE Transactions on Instrumentationand Measurement vol 62 no 3 pp 590ndash598 2013
[9] F Bianchi S J RedmondMRNarayanan S Cerutti andNHLovell ldquoBarometric pressure and triaxial accelerometry-basedfalls event detectionrdquo IEEE Transactions on Neural Systems andRehabilitation Engineering vol 18 no 6 pp 619ndash627 2010
[10] S-L Hsieh K-R Chen C-L Yeh et al ldquoAn unfixed-positionsmartphone-based fall detection schemerdquo in Proceedings of theIEEE International Conference on Systems Man and Cybernetics(SMC rsquo14) pp 2077ndash2081 San Diego Calif USA 2014
[11] S D Bersch C M J Chislett D Azzi R Kusainov and JS Briggs ldquoActivity detection using frequency analysis and off-the-shelf devices fall detection from accelerometer datardquo inProceedings of the 5th International Conference on PervasiveComputing Technologies for Healthcare and Workshops (Perva-siveHealth rsquo11) pp 362ndash365 Dublin Ireland May 2011
[12] A H Khandoker D Lai R K Begg and M Palaniswami ldquoAwavelet-based approach for screening falls risk in the elderlyusing support vector machinesrdquo in Proceedings of the 4thInternational Conference on Intelligent Sensing and InformationProcessing (ICISIP rsquo06) pp 184ndash189 Bangalore India Decem-ber 2006
[13] A K Bourke J V OrsquoBrien and G M Lyons ldquoEvaluation ofa threshold-based tri-axial accelerometer fall detection algo-rithmrdquo Gait and Posture vol 26 no 2 pp 194ndash199 2007
International Journal of Telemedicine and Applications 11
[14] T Zhang JWang L Xu et al ldquofall detection by wearable sensorand one-class SVM algorithmrdquo in Intelligent Computing in Sig-nal Processing and Pattern Recognition International Conferenceon Intelligent Computing ICIC 2006 Kunming China August16ndash19 2006 vol 345 of Lecture Notes in Control and InformationSciences pp 858ndash863 Springer Berlin Germany 2006
[15] S Abbate M Avvenuti F Bonatesta G Cola P Corsini and AVecchio ldquoA smartphone-based fall detection systemrdquo Pervasiveand Mobile Computing vol 8 no 6 pp 883ndash899 2012
[16] A M Sabatini ldquoQuaternion-based strap-down integrationmethod for applications of inertial sensing to gait analysisrdquoMedical and Biological Engineering and Computing vol 43 no1 pp 94ndash101 2005
[17] J VinceQuaternions for Computer Graphics Springer LondonUK 2011
[18] J Chen K Karric D Chang et al ldquoWearable sensors for reliablefall detectionrdquo in Proceedings of the 27th Annual InternationalConference of the Engineering in Medicine and Biology Society(EMBS rsquo05) pp 3551ndash3554 Shanghai China 2005
[19] F Wu C Hu H Zhao and Y Zhao ldquoDevelopment of a fallalarm system based onmulti-sensor integrationrdquo in Proceedingsof the 25th International Technical Meeting of the SatelliteDivision of the Institute of Navigation (IONGNSS rsquo12) pp 3805ndash3813 Nashville Tenn USA September 2012
[20] C V C Bouten K T M Koekkoek M Verduin R Koddeand J D Janssen ldquoA triaxial accelerometer and portable dataprocessing unit for the assessment of daily physical activityrdquoIEEE Transactions on Biomedical Engineering vol 44 no 3 pp136ndash147 1997
[21] M Kangas I Vikman JWiklander P Lindgren L Nyberg andT Jamsa ldquoSensitivity and specificity of fall detection in peopleaged 40 years and overrdquo Gait amp Posture vol 29 no 4 pp 571ndash574 2009
[22] P Jantaraprim P Phukpattaranont C Limsakul and BWongkittisuksa ldquoEvaluation of fall detection for the elderly on avariety of subject groupsrdquo in Proceedings of the 3rd InternationalConvention on Rehabilitation Engineering amp Assistive Technol-ogy (ICREATE rsquo09) pp 1ndash4 Singapore April 2009
[23] S Abbate M Avvenuti G Cola et al ldquoRecognition of falsealarms in fall detection systemsrdquo in Consumer Communicationsand Networking Conference (CCNC rsquo11) pp 23ndash28 Las VegasNev USA 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
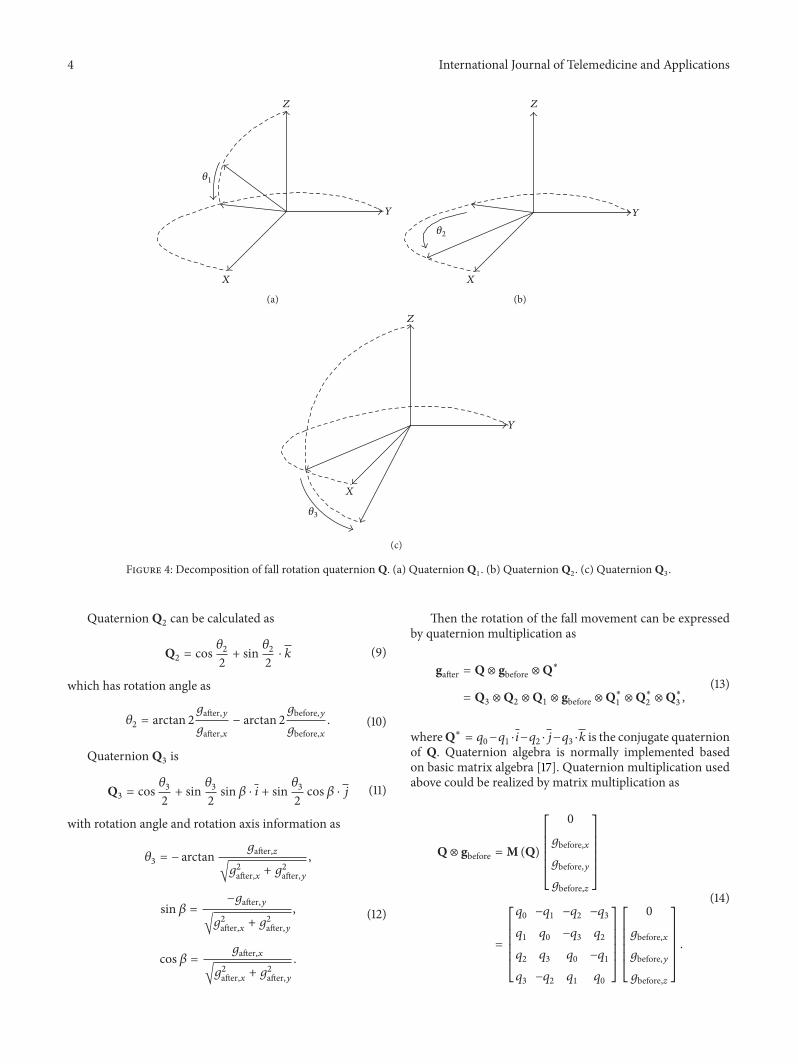
4 International Journal of Telemedicine and Applications
Z
Y
X
1205791
(a)
Z
Y
X
1205792
(b)
Z
Y
X
1205793
(c)
Figure 4 Decomposition of fall rotation quaternion Q (a) QuaternionQ1 (b) Quaternion Q
2 (c) Quaternion Q
3
QuaternionQ2can be calculated as
Q2= cos 12057922+ sin 12057922sdot 119896 (9)
which has rotation angle as
1205792= arctan 2
119892after119910
119892after119909minus arctan 2
119892before119910
119892before119909 (10)
QuaternionQ3is
Q3= cos1205793
2+ sin1205793
2sin120573 sdot 119894 + sin
1205793
2cos120573 sdot 119895 (11)
with rotation angle and rotation axis information as
1205793= minus arctan
119892after119911
radic1198922after119909 + 1198922
after119910
sin120573 =minus119892after119910
radic1198922after119909 + 1198922
after119910
cos120573 =119892after119909
radic1198922after119909 + 1198922
after119910
(12)
Then the rotation of the fall movement can be expressedby quaternion multiplication as
gafter = Q otimes gbefore otimesQlowast
= Q3otimesQ2otimesQ1otimes gbefore otimesQ
lowast
1otimesQlowast2otimesQlowast3
(13)
whereQlowast = 1199020minus1199021sdot 119894minus1199022sdot119895minus1199023sdot119896 is the conjugate quaternion
of Q Quaternion algebra is normally implemented basedon basic matrix algebra [17] Quaternion multiplication usedabove could be realized by matrix multiplication as
Q otimes gbefore = M (Q)[[[[[
[
0
119892before119909
119892before119910
119892before119911
]]]]]
]
=
[[[[[
[
1199020minus1199021minus1199022minus1199023
11990211199020minus11990231199022
119902211990231199020minus1199021
1199023minus119902211990211199020
]]]]]
]
[[[[[
[
0
119892before119909
119892before119910
119892before119911
]]]]]
]
(14)
International Journal of Telemedicine and Applications 5
Accelerationacquisition
Regard asfalling
Impact state
and
Record a as gbeforewhile standing
|a| lt athreshold
|a| ge athresholdt ge tthreshold
t lt tthreshold|a| ≉ g
t ge tthreshold and |a| asymp g
Lying staterecord a as gafter
calculate 120579|120579| ≉ 90∘
|120579| asymp 90∘
Figure 5 Fall detection algorithm state machine
Power managerunit
AccelerometerADXL345
I2C
33V
MicrocontrollerMSP430F1611
USART
USART
GPSantenna
Gps
module
module
SIM908
GSM
GSMantenna
Figure 6 Basic hardware structure
The whole rotation quaternion can also be decomposedas
Q = Q3otimesQ2otimesQ1
= M (Q3)M (Q
2)Q1
(15)
Q1Q2 andQ
3are all available based on gravity information
before and after the falling movement At last it is possible to
get four elements of quaternionQ by the equation above andthe rotation angle 120579 could be calculated as
120579 = 2 sdot arctan(radic1199021
2 + 1199022
2 + 1199023
2
1199020
) (16)
6 International Journal of Telemedicine and Applications
GPS antenna MSP430F1611 ADXL345Top
SIM908 GSM antennaBottom
4000mm5000
mm
Figure 7 PCB board prototype
Yes
Yes
No
No
Record gbeforewhile standing
Fall detectionalgorithm
Get position andsend alarm SMS
Falling
Withdraw alarm
Remind the elderly
Inform caregiversthrough SMS
Figure 8 System software flow diagram
When an object is falling magnitude of 120579 will approach90∘ which is also a character different from most normalactivities So it could be used as the second detection featurebeside sum acceleration
The flow chart of the proposed algorithm is depicted inFigure 5
The wearable device will be mounted on humanrsquos waistat first to reflect the motion of human body closely [18] andthe device will record gbefore while the elderly is standing
stillThere is no special requirement of the device orientationbut only keep stationary during the wear 119886threshold means thethreshold of sum acceleration magnitude and 119905threshold meansthe threshold of oscillation time duration after the break of119886threshold
When measurements in three different axes have beenacquired the sum acceleration |a| will be calculated Whena real fall happens sum acceleration will reach peak value of|a| ge 119886threshold In a real falling the fluctuation of acceleration
International Journal of Telemedicine and Applications 7
0 05 1 15 2 25 3minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
Time (s)
Acce
lera
tion
(g)
(b)
05 1 15 2 25 3 35minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(c)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
8
9
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(d)
Figure 9 Acceleration waveforms during fall (a) Forward fall (b) Backward fall (c) Leftward fall (d) Rightward fall
will stop in time duration 119905threshold and then the sum accel-eration is |a| asymp 119892 as the elderly will lie on the ground Thenthe acceleration a is recorded as gafter Quaternion rotation 120579will be calculated based on information gbefore and gafter Atlast the system will consider it as a fall if the rotation angle|120579| asymp 90
∘
4 Implementation
41 Hardware ADIrsquos digital triaxial accelerometer ADXL345is themotion sensor used in this systemTheGPS service andGSM communication function are integrated in SIMComrsquos
SIM908 module TIrsquos 16 bits MCU MSP430F1611 is used tocontrol the whole system and imply the detection algorithm[19]
The measurement range of accelerometer could be set atplusmn2 g plusmn4 g plusmn8 g or plusmn16 g and the maximal sampling rate is32 kHz As humanrsquos activities are normally at low frequencybands [20] 100Hz is a proper sampling rate for human falldetection There is an inner digital filter in ADXL345 whichcould weaken noise and reduce the burden of digital signalprocessing inMCU to some extentThemeasurementswill besent through IIC (interintegrated circuit) bus communicationbetween the sensor and the MCU
8 International Journal of Telemedicine and Applications
SIM908 can offer GPS and GSM service on serial portcommunicationwithMCU and it can also work in low powermode
Each hardware component of the wearable device isworking under low voltage and the detection algorithmdoes not need complex calculation resource so the powerconsumption of the whole device is quite low A 1200mAh37 V polymer lithium battery is quite enough to provide theneed of the wearable device for a couple of days
Hardware structure of the detection device is shown inFigure 6 and the PCB board prototype is shown in Figure 7
42 Software The software design of the system can bedivided into two parts One of them is the software designin wearable device and the other is in the caregiverrsquos handset
421 Wearable Device Flow diagram of the wearable devicesoftware is shown in Figure 8
After initialization of the system gbefore would beextracted from acceleration measurements by using a lowpass filter when the elderly is standing After that the falldetection algorithmwill be applied If a fall has been detectedthe wearable device will locate the user and send alarmshort message to caregivers immediatelyThen the device willremind the elderly through vibration If the user withdrawsthe alarm by pressing a button manually the device will getback to fall detection state and a short message will be sent toinform the caregivers
422 Caregiverrsquos Handset There is aURL (universal resourcelocator) which links to a webmap in the alarm shortmessageThe fall location information will be highlighted on a webmap when the caregiver opens this link
5 System Test
System test of the fall detection system has been conductedbased on the system design described above
51 Wearable Device and Fall Detection Algorithm Thesampling rate of accelerometer is set at 100Hz and themeasurement range is plusmn16 g with a maximum precision of4mg MCU will read raw measurements from sensorrsquos innerFIFO and apply the detection algorithm
The test objects are three different volunteers at the agesof 23 42 and 60 respectively Based on analysis of thesevolunteersrsquo experiment data 119886threshold and 119905threshold are set as2 g and 2 s respectively In order to get g when standing andlying after the fall sum acceleration a which has magnitudebetween (1minus03) g and (1+03) g will be considered as gbeforeand gafter Considering that the tilt of the ground or the lyingposture of the elderly may affect the rotation angle rotationangle 120579 between (90 minus 30)∘ and (90 + 30)∘ will infer that theelderly has fallen
System test contains five kinds of activities of daily living(ie walking jumping squatting sitting and resting) andfour kinds of fallings (ie forward backward leftward andrightward)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
Figure 10 Resting
Table 1 Test results for four kinds of falling and five kinds of ADL
Motion typeAlarm timestest times
Proposed designAcceleration
threshold baseddesign
Forward fall 6060 5960Backward fall 5660 5460Leftward fall 5860 5260Rightward fall 5960 5560Walking 060 460Jumping 060 1160Squatting 060 060Sitting 060 960Resting 560 1060
Each kind of motion has been repeated 20 times on eachvolunteer and the detection results of the proposed algorithmand an acceleration threshold based algorithm [13] are listedin Table 1
The sensitivity and specificity [21 22] of the proposedsystem can be got from the test data in Table 1 Sensitivityof the proposed algorithm is 971 and the specificity is983 Test results of acceleration threshold based algorithmshow lower sensitivity and specificity at 916 and 887respectively
Figure 9 shows the accelerations in different kinds offallings which all trigger the fall alarm correctly and thecorresponding rotation angles are 919∘ minus1005∘ 1047∘ andminus1141∘
Figure 10 shows acceleration during activity of lying downand resting which has rotation angle of minus1170∘ and similar
International Journal of Telemedicine and Applications 9
0 05 1 15 2minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2minus10
minus5
0
5
10
15
Time (s)
Acce
lera
tion
(g)
(b)
0 05 1 15 2 25 3 35 4minus2
minus1
0
1
2
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(c)
0 05 1 15 2minus4
minus3
minus2
minus1
0
1
2
3
4
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(d)
Figure 11 Acceleration waveform during ADL (a) Walking (b) Jumping (c) Squatting (d) Sitting
waveform to falling [23] but the peak acceleration is muchlower Fall alarm has not been triggered yet at this situation
Figure 11 shows acceleration during otherADL testsTheyall do not have rotation about 90∘ even some of the peakvalues are quite high so the fall alarm has not been triggered
52 Location Based Service Alarm receiving function oncaregiverrsquos handset has also been tested An alarm SMS (shortmessage service) containing a map URL has been receivedby the handset as shown in Figure 12 when a fall has beendetected Clicking the URL will open a map in Web browseron which the fall location will be displayed accurately asshown in Figure 13
6 Conclusion
This paper developed a fall detection system based on a singletriaxial accelerometer based wearable deviceThere is no spe-cial requirement of the devicersquosmounting orientation becausethe algorithm does not claim the axes of accelerometer to befixed strictly The system has low power consumed hardwaredesign and highly efficient algorithm which could extendthe service time of the wearable device Both the hardwareand software designs are suitable for wearable and outdoorapplication
As normal activity of resting also has similar rotationas falling it may trigger fall alarm when the body hits
10 International Journal of Telemedicine and Applications
Figure 12 Fall alarm SMS which contains fall location URL
Figure 13 Fall location displayed on a Web map
ground heavily So the choice of 119886threshold is quite importantto distinguish falling from heavily lying activity Sufficientsample number collected from subjects with different ageand gender will improve the reliability and robustness of thethreshold Beside these technologies such as SVMand neuralnetwork are considerable to seek out a proper classificationmethod based on the features used in this system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is partially supported by the Open ResearchFund of the Academy of Satellite Application under Grantno 2014 CXJJ-DH 07 the Scientific Research Foundation forthe Returned Overseas Chinese Scholars State EducationMinistry and the Specialized Research Fund for the DoctoralProgram of High Education China
References
[1] M K Karlsson H Magnusson T von Schewelov and BE Rosengren ldquoPrevention of falls in the elderlymdasha reviewrdquoOsteoporosis International vol 24 no 3 pp 747ndash762 2013
[2] T Shany S J Redmond M R Narayanan and N H LovellldquoSensors-based wearable systems for monitoring of humanmovement and fallsrdquo IEEE Sensors Journal vol 12 no 3 pp658ndash670 2012
[3] M Mubashir L Shao and L Seed ldquoA survey on fall detectionprinciples and approachesrdquo Neurocomputing vol 100 pp 144ndash152 2013
[4] M Grassi A Lombardi G Rescio et al ldquoAn integrated systemfor people fall-detection with data fusion capabilities based on3D ToF camera and wireless accelerometerrdquo in Proceedings ofthe 9th IEEE Sensors Conference (SENSORS rsquo10) pp 1016ndash1019Kona Hawaii USA November 2010
[5] A K Bourke K OrsquoDonovan A Clifford et al ldquoOptimumgravity vector and vertical acceleration estimation using a tri-axial accelerometer for falls and normal activitiesrdquo in AnnualInternational Conference of the IEEE Engineering in Medicineand Biology Society (EMBC rsquo11) pp 7896ndash7899 Boston MassUSA 2011
[6] G Anania A Tognetti N Carbonaro et al ldquoDevelopmentof a novel algorithm for human fall detection using wearablesensorsrdquo inProceedings of the IEEE Sensors pp 1336ndash1339 IEEELecce Italy October 2009
[7] L Qiang J A Stankovic M A Hanson A T Barth J Lachand G Zhou ldquoAccurate fast fall detection using gyroscopes andaccelerometer-derived posture informationrdquo in Proceedings ofthe 6th International Workshop on Wearable and ImplantableBody Sensor Networks (BSN rsquo09) pp 138ndash143 Berkeley CalifUSA June 2009
[8] S Sabatelli M Galgani L Fanucci and A Rocchi ldquoA double-stage kalman filter for orientation tracking with an integratedprocessor in 9-D IMUrdquo IEEE Transactions on Instrumentationand Measurement vol 62 no 3 pp 590ndash598 2013
[9] F Bianchi S J RedmondMRNarayanan S Cerutti andNHLovell ldquoBarometric pressure and triaxial accelerometry-basedfalls event detectionrdquo IEEE Transactions on Neural Systems andRehabilitation Engineering vol 18 no 6 pp 619ndash627 2010
[10] S-L Hsieh K-R Chen C-L Yeh et al ldquoAn unfixed-positionsmartphone-based fall detection schemerdquo in Proceedings of theIEEE International Conference on Systems Man and Cybernetics(SMC rsquo14) pp 2077ndash2081 San Diego Calif USA 2014
[11] S D Bersch C M J Chislett D Azzi R Kusainov and JS Briggs ldquoActivity detection using frequency analysis and off-the-shelf devices fall detection from accelerometer datardquo inProceedings of the 5th International Conference on PervasiveComputing Technologies for Healthcare and Workshops (Perva-siveHealth rsquo11) pp 362ndash365 Dublin Ireland May 2011
[12] A H Khandoker D Lai R K Begg and M Palaniswami ldquoAwavelet-based approach for screening falls risk in the elderlyusing support vector machinesrdquo in Proceedings of the 4thInternational Conference on Intelligent Sensing and InformationProcessing (ICISIP rsquo06) pp 184ndash189 Bangalore India Decem-ber 2006
[13] A K Bourke J V OrsquoBrien and G M Lyons ldquoEvaluation ofa threshold-based tri-axial accelerometer fall detection algo-rithmrdquo Gait and Posture vol 26 no 2 pp 194ndash199 2007
International Journal of Telemedicine and Applications 11
[14] T Zhang JWang L Xu et al ldquofall detection by wearable sensorand one-class SVM algorithmrdquo in Intelligent Computing in Sig-nal Processing and Pattern Recognition International Conferenceon Intelligent Computing ICIC 2006 Kunming China August16ndash19 2006 vol 345 of Lecture Notes in Control and InformationSciences pp 858ndash863 Springer Berlin Germany 2006
[15] S Abbate M Avvenuti F Bonatesta G Cola P Corsini and AVecchio ldquoA smartphone-based fall detection systemrdquo Pervasiveand Mobile Computing vol 8 no 6 pp 883ndash899 2012
[16] A M Sabatini ldquoQuaternion-based strap-down integrationmethod for applications of inertial sensing to gait analysisrdquoMedical and Biological Engineering and Computing vol 43 no1 pp 94ndash101 2005
[17] J VinceQuaternions for Computer Graphics Springer LondonUK 2011
[18] J Chen K Karric D Chang et al ldquoWearable sensors for reliablefall detectionrdquo in Proceedings of the 27th Annual InternationalConference of the Engineering in Medicine and Biology Society(EMBS rsquo05) pp 3551ndash3554 Shanghai China 2005
[19] F Wu C Hu H Zhao and Y Zhao ldquoDevelopment of a fallalarm system based onmulti-sensor integrationrdquo in Proceedingsof the 25th International Technical Meeting of the SatelliteDivision of the Institute of Navigation (IONGNSS rsquo12) pp 3805ndash3813 Nashville Tenn USA September 2012
[20] C V C Bouten K T M Koekkoek M Verduin R Koddeand J D Janssen ldquoA triaxial accelerometer and portable dataprocessing unit for the assessment of daily physical activityrdquoIEEE Transactions on Biomedical Engineering vol 44 no 3 pp136ndash147 1997
[21] M Kangas I Vikman JWiklander P Lindgren L Nyberg andT Jamsa ldquoSensitivity and specificity of fall detection in peopleaged 40 years and overrdquo Gait amp Posture vol 29 no 4 pp 571ndash574 2009
[22] P Jantaraprim P Phukpattaranont C Limsakul and BWongkittisuksa ldquoEvaluation of fall detection for the elderly on avariety of subject groupsrdquo in Proceedings of the 3rd InternationalConvention on Rehabilitation Engineering amp Assistive Technol-ogy (ICREATE rsquo09) pp 1ndash4 Singapore April 2009
[23] S Abbate M Avvenuti G Cola et al ldquoRecognition of falsealarms in fall detection systemsrdquo in Consumer Communicationsand Networking Conference (CCNC rsquo11) pp 23ndash28 Las VegasNev USA 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
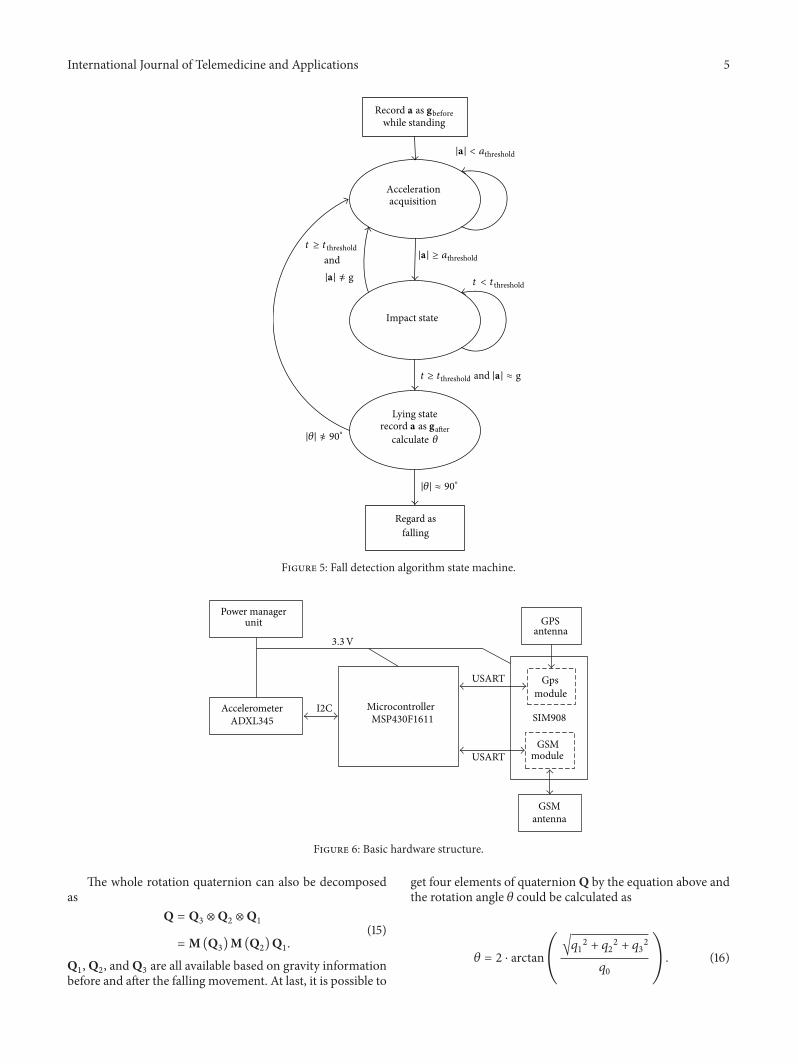
International Journal of Telemedicine and Applications 5
Accelerationacquisition
Regard asfalling
Impact state
and
Record a as gbeforewhile standing
|a| lt athreshold
|a| ge athresholdt ge tthreshold
t lt tthreshold|a| ≉ g
t ge tthreshold and |a| asymp g
Lying staterecord a as gafter
calculate 120579|120579| ≉ 90∘
|120579| asymp 90∘
Figure 5 Fall detection algorithm state machine
Power managerunit
AccelerometerADXL345
I2C
33V
MicrocontrollerMSP430F1611
USART
USART
GPSantenna
Gps
module
module
SIM908
GSM
GSMantenna
Figure 6 Basic hardware structure
The whole rotation quaternion can also be decomposedas
Q = Q3otimesQ2otimesQ1
= M (Q3)M (Q
2)Q1
(15)
Q1Q2 andQ
3are all available based on gravity information
before and after the falling movement At last it is possible to
get four elements of quaternionQ by the equation above andthe rotation angle 120579 could be calculated as
120579 = 2 sdot arctan(radic1199021
2 + 1199022
2 + 1199023
2
1199020
) (16)
6 International Journal of Telemedicine and Applications
GPS antenna MSP430F1611 ADXL345Top
SIM908 GSM antennaBottom
4000mm5000
mm
Figure 7 PCB board prototype
Yes
Yes
No
No
Record gbeforewhile standing
Fall detectionalgorithm
Get position andsend alarm SMS
Falling
Withdraw alarm
Remind the elderly
Inform caregiversthrough SMS
Figure 8 System software flow diagram
When an object is falling magnitude of 120579 will approach90∘ which is also a character different from most normalactivities So it could be used as the second detection featurebeside sum acceleration
The flow chart of the proposed algorithm is depicted inFigure 5
The wearable device will be mounted on humanrsquos waistat first to reflect the motion of human body closely [18] andthe device will record gbefore while the elderly is standing
stillThere is no special requirement of the device orientationbut only keep stationary during the wear 119886threshold means thethreshold of sum acceleration magnitude and 119905threshold meansthe threshold of oscillation time duration after the break of119886threshold
When measurements in three different axes have beenacquired the sum acceleration |a| will be calculated Whena real fall happens sum acceleration will reach peak value of|a| ge 119886threshold In a real falling the fluctuation of acceleration
International Journal of Telemedicine and Applications 7
0 05 1 15 2 25 3minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
Time (s)
Acce
lera
tion
(g)
(b)
05 1 15 2 25 3 35minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(c)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
8
9
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(d)
Figure 9 Acceleration waveforms during fall (a) Forward fall (b) Backward fall (c) Leftward fall (d) Rightward fall
will stop in time duration 119905threshold and then the sum accel-eration is |a| asymp 119892 as the elderly will lie on the ground Thenthe acceleration a is recorded as gafter Quaternion rotation 120579will be calculated based on information gbefore and gafter Atlast the system will consider it as a fall if the rotation angle|120579| asymp 90
∘
4 Implementation
41 Hardware ADIrsquos digital triaxial accelerometer ADXL345is themotion sensor used in this systemTheGPS service andGSM communication function are integrated in SIMComrsquos
SIM908 module TIrsquos 16 bits MCU MSP430F1611 is used tocontrol the whole system and imply the detection algorithm[19]
The measurement range of accelerometer could be set atplusmn2 g plusmn4 g plusmn8 g or plusmn16 g and the maximal sampling rate is32 kHz As humanrsquos activities are normally at low frequencybands [20] 100Hz is a proper sampling rate for human falldetection There is an inner digital filter in ADXL345 whichcould weaken noise and reduce the burden of digital signalprocessing inMCU to some extentThemeasurementswill besent through IIC (interintegrated circuit) bus communicationbetween the sensor and the MCU
8 International Journal of Telemedicine and Applications
SIM908 can offer GPS and GSM service on serial portcommunicationwithMCU and it can also work in low powermode
Each hardware component of the wearable device isworking under low voltage and the detection algorithmdoes not need complex calculation resource so the powerconsumption of the whole device is quite low A 1200mAh37 V polymer lithium battery is quite enough to provide theneed of the wearable device for a couple of days
Hardware structure of the detection device is shown inFigure 6 and the PCB board prototype is shown in Figure 7
42 Software The software design of the system can bedivided into two parts One of them is the software designin wearable device and the other is in the caregiverrsquos handset
421 Wearable Device Flow diagram of the wearable devicesoftware is shown in Figure 8
After initialization of the system gbefore would beextracted from acceleration measurements by using a lowpass filter when the elderly is standing After that the falldetection algorithmwill be applied If a fall has been detectedthe wearable device will locate the user and send alarmshort message to caregivers immediatelyThen the device willremind the elderly through vibration If the user withdrawsthe alarm by pressing a button manually the device will getback to fall detection state and a short message will be sent toinform the caregivers
422 Caregiverrsquos Handset There is aURL (universal resourcelocator) which links to a webmap in the alarm shortmessageThe fall location information will be highlighted on a webmap when the caregiver opens this link
5 System Test
System test of the fall detection system has been conductedbased on the system design described above
51 Wearable Device and Fall Detection Algorithm Thesampling rate of accelerometer is set at 100Hz and themeasurement range is plusmn16 g with a maximum precision of4mg MCU will read raw measurements from sensorrsquos innerFIFO and apply the detection algorithm
The test objects are three different volunteers at the agesof 23 42 and 60 respectively Based on analysis of thesevolunteersrsquo experiment data 119886threshold and 119905threshold are set as2 g and 2 s respectively In order to get g when standing andlying after the fall sum acceleration a which has magnitudebetween (1minus03) g and (1+03) g will be considered as gbeforeand gafter Considering that the tilt of the ground or the lyingposture of the elderly may affect the rotation angle rotationangle 120579 between (90 minus 30)∘ and (90 + 30)∘ will infer that theelderly has fallen
System test contains five kinds of activities of daily living(ie walking jumping squatting sitting and resting) andfour kinds of fallings (ie forward backward leftward andrightward)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
Figure 10 Resting
Table 1 Test results for four kinds of falling and five kinds of ADL
Motion typeAlarm timestest times
Proposed designAcceleration
threshold baseddesign
Forward fall 6060 5960Backward fall 5660 5460Leftward fall 5860 5260Rightward fall 5960 5560Walking 060 460Jumping 060 1160Squatting 060 060Sitting 060 960Resting 560 1060
Each kind of motion has been repeated 20 times on eachvolunteer and the detection results of the proposed algorithmand an acceleration threshold based algorithm [13] are listedin Table 1
The sensitivity and specificity [21 22] of the proposedsystem can be got from the test data in Table 1 Sensitivityof the proposed algorithm is 971 and the specificity is983 Test results of acceleration threshold based algorithmshow lower sensitivity and specificity at 916 and 887respectively
Figure 9 shows the accelerations in different kinds offallings which all trigger the fall alarm correctly and thecorresponding rotation angles are 919∘ minus1005∘ 1047∘ andminus1141∘
Figure 10 shows acceleration during activity of lying downand resting which has rotation angle of minus1170∘ and similar
International Journal of Telemedicine and Applications 9
0 05 1 15 2minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2minus10
minus5
0
5
10
15
Time (s)
Acce
lera
tion
(g)
(b)
0 05 1 15 2 25 3 35 4minus2
minus1
0
1
2
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(c)
0 05 1 15 2minus4
minus3
minus2
minus1
0
1
2
3
4
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(d)
Figure 11 Acceleration waveform during ADL (a) Walking (b) Jumping (c) Squatting (d) Sitting
waveform to falling [23] but the peak acceleration is muchlower Fall alarm has not been triggered yet at this situation
Figure 11 shows acceleration during otherADL testsTheyall do not have rotation about 90∘ even some of the peakvalues are quite high so the fall alarm has not been triggered
52 Location Based Service Alarm receiving function oncaregiverrsquos handset has also been tested An alarm SMS (shortmessage service) containing a map URL has been receivedby the handset as shown in Figure 12 when a fall has beendetected Clicking the URL will open a map in Web browseron which the fall location will be displayed accurately asshown in Figure 13
6 Conclusion
This paper developed a fall detection system based on a singletriaxial accelerometer based wearable deviceThere is no spe-cial requirement of the devicersquosmounting orientation becausethe algorithm does not claim the axes of accelerometer to befixed strictly The system has low power consumed hardwaredesign and highly efficient algorithm which could extendthe service time of the wearable device Both the hardwareand software designs are suitable for wearable and outdoorapplication
As normal activity of resting also has similar rotationas falling it may trigger fall alarm when the body hits
10 International Journal of Telemedicine and Applications
Figure 12 Fall alarm SMS which contains fall location URL
Figure 13 Fall location displayed on a Web map
ground heavily So the choice of 119886threshold is quite importantto distinguish falling from heavily lying activity Sufficientsample number collected from subjects with different ageand gender will improve the reliability and robustness of thethreshold Beside these technologies such as SVMand neuralnetwork are considerable to seek out a proper classificationmethod based on the features used in this system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is partially supported by the Open ResearchFund of the Academy of Satellite Application under Grantno 2014 CXJJ-DH 07 the Scientific Research Foundation forthe Returned Overseas Chinese Scholars State EducationMinistry and the Specialized Research Fund for the DoctoralProgram of High Education China
References
[1] M K Karlsson H Magnusson T von Schewelov and BE Rosengren ldquoPrevention of falls in the elderlymdasha reviewrdquoOsteoporosis International vol 24 no 3 pp 747ndash762 2013
[2] T Shany S J Redmond M R Narayanan and N H LovellldquoSensors-based wearable systems for monitoring of humanmovement and fallsrdquo IEEE Sensors Journal vol 12 no 3 pp658ndash670 2012
[3] M Mubashir L Shao and L Seed ldquoA survey on fall detectionprinciples and approachesrdquo Neurocomputing vol 100 pp 144ndash152 2013
[4] M Grassi A Lombardi G Rescio et al ldquoAn integrated systemfor people fall-detection with data fusion capabilities based on3D ToF camera and wireless accelerometerrdquo in Proceedings ofthe 9th IEEE Sensors Conference (SENSORS rsquo10) pp 1016ndash1019Kona Hawaii USA November 2010
[5] A K Bourke K OrsquoDonovan A Clifford et al ldquoOptimumgravity vector and vertical acceleration estimation using a tri-axial accelerometer for falls and normal activitiesrdquo in AnnualInternational Conference of the IEEE Engineering in Medicineand Biology Society (EMBC rsquo11) pp 7896ndash7899 Boston MassUSA 2011
[6] G Anania A Tognetti N Carbonaro et al ldquoDevelopmentof a novel algorithm for human fall detection using wearablesensorsrdquo inProceedings of the IEEE Sensors pp 1336ndash1339 IEEELecce Italy October 2009
[7] L Qiang J A Stankovic M A Hanson A T Barth J Lachand G Zhou ldquoAccurate fast fall detection using gyroscopes andaccelerometer-derived posture informationrdquo in Proceedings ofthe 6th International Workshop on Wearable and ImplantableBody Sensor Networks (BSN rsquo09) pp 138ndash143 Berkeley CalifUSA June 2009
[8] S Sabatelli M Galgani L Fanucci and A Rocchi ldquoA double-stage kalman filter for orientation tracking with an integratedprocessor in 9-D IMUrdquo IEEE Transactions on Instrumentationand Measurement vol 62 no 3 pp 590ndash598 2013
[9] F Bianchi S J RedmondMRNarayanan S Cerutti andNHLovell ldquoBarometric pressure and triaxial accelerometry-basedfalls event detectionrdquo IEEE Transactions on Neural Systems andRehabilitation Engineering vol 18 no 6 pp 619ndash627 2010
[10] S-L Hsieh K-R Chen C-L Yeh et al ldquoAn unfixed-positionsmartphone-based fall detection schemerdquo in Proceedings of theIEEE International Conference on Systems Man and Cybernetics(SMC rsquo14) pp 2077ndash2081 San Diego Calif USA 2014
[11] S D Bersch C M J Chislett D Azzi R Kusainov and JS Briggs ldquoActivity detection using frequency analysis and off-the-shelf devices fall detection from accelerometer datardquo inProceedings of the 5th International Conference on PervasiveComputing Technologies for Healthcare and Workshops (Perva-siveHealth rsquo11) pp 362ndash365 Dublin Ireland May 2011
[12] A H Khandoker D Lai R K Begg and M Palaniswami ldquoAwavelet-based approach for screening falls risk in the elderlyusing support vector machinesrdquo in Proceedings of the 4thInternational Conference on Intelligent Sensing and InformationProcessing (ICISIP rsquo06) pp 184ndash189 Bangalore India Decem-ber 2006
[13] A K Bourke J V OrsquoBrien and G M Lyons ldquoEvaluation ofa threshold-based tri-axial accelerometer fall detection algo-rithmrdquo Gait and Posture vol 26 no 2 pp 194ndash199 2007
International Journal of Telemedicine and Applications 11
[14] T Zhang JWang L Xu et al ldquofall detection by wearable sensorand one-class SVM algorithmrdquo in Intelligent Computing in Sig-nal Processing and Pattern Recognition International Conferenceon Intelligent Computing ICIC 2006 Kunming China August16ndash19 2006 vol 345 of Lecture Notes in Control and InformationSciences pp 858ndash863 Springer Berlin Germany 2006
[15] S Abbate M Avvenuti F Bonatesta G Cola P Corsini and AVecchio ldquoA smartphone-based fall detection systemrdquo Pervasiveand Mobile Computing vol 8 no 6 pp 883ndash899 2012
[16] A M Sabatini ldquoQuaternion-based strap-down integrationmethod for applications of inertial sensing to gait analysisrdquoMedical and Biological Engineering and Computing vol 43 no1 pp 94ndash101 2005
[17] J VinceQuaternions for Computer Graphics Springer LondonUK 2011
[18] J Chen K Karric D Chang et al ldquoWearable sensors for reliablefall detectionrdquo in Proceedings of the 27th Annual InternationalConference of the Engineering in Medicine and Biology Society(EMBS rsquo05) pp 3551ndash3554 Shanghai China 2005
[19] F Wu C Hu H Zhao and Y Zhao ldquoDevelopment of a fallalarm system based onmulti-sensor integrationrdquo in Proceedingsof the 25th International Technical Meeting of the SatelliteDivision of the Institute of Navigation (IONGNSS rsquo12) pp 3805ndash3813 Nashville Tenn USA September 2012
[20] C V C Bouten K T M Koekkoek M Verduin R Koddeand J D Janssen ldquoA triaxial accelerometer and portable dataprocessing unit for the assessment of daily physical activityrdquoIEEE Transactions on Biomedical Engineering vol 44 no 3 pp136ndash147 1997
[21] M Kangas I Vikman JWiklander P Lindgren L Nyberg andT Jamsa ldquoSensitivity and specificity of fall detection in peopleaged 40 years and overrdquo Gait amp Posture vol 29 no 4 pp 571ndash574 2009
[22] P Jantaraprim P Phukpattaranont C Limsakul and BWongkittisuksa ldquoEvaluation of fall detection for the elderly on avariety of subject groupsrdquo in Proceedings of the 3rd InternationalConvention on Rehabilitation Engineering amp Assistive Technol-ogy (ICREATE rsquo09) pp 1ndash4 Singapore April 2009
[23] S Abbate M Avvenuti G Cola et al ldquoRecognition of falsealarms in fall detection systemsrdquo in Consumer Communicationsand Networking Conference (CCNC rsquo11) pp 23ndash28 Las VegasNev USA 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
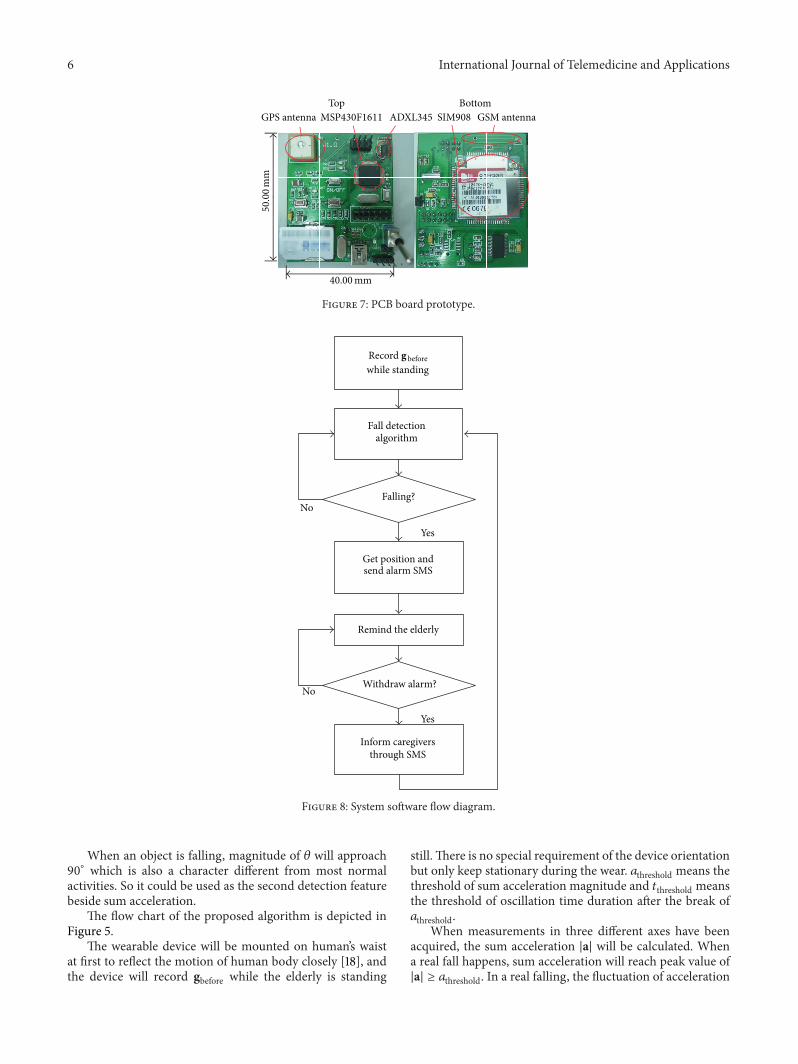
6 International Journal of Telemedicine and Applications
GPS antenna MSP430F1611 ADXL345Top
SIM908 GSM antennaBottom
4000mm5000
mm
Figure 7 PCB board prototype
Yes
Yes
No
No
Record gbeforewhile standing
Fall detectionalgorithm
Get position andsend alarm SMS
Falling
Withdraw alarm
Remind the elderly
Inform caregiversthrough SMS
Figure 8 System software flow diagram
When an object is falling magnitude of 120579 will approach90∘ which is also a character different from most normalactivities So it could be used as the second detection featurebeside sum acceleration
The flow chart of the proposed algorithm is depicted inFigure 5
The wearable device will be mounted on humanrsquos waistat first to reflect the motion of human body closely [18] andthe device will record gbefore while the elderly is standing
stillThere is no special requirement of the device orientationbut only keep stationary during the wear 119886threshold means thethreshold of sum acceleration magnitude and 119905threshold meansthe threshold of oscillation time duration after the break of119886threshold
When measurements in three different axes have beenacquired the sum acceleration |a| will be calculated Whena real fall happens sum acceleration will reach peak value of|a| ge 119886threshold In a real falling the fluctuation of acceleration
International Journal of Telemedicine and Applications 7
0 05 1 15 2 25 3minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
Time (s)
Acce
lera
tion
(g)
(b)
05 1 15 2 25 3 35minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(c)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
8
9
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(d)
Figure 9 Acceleration waveforms during fall (a) Forward fall (b) Backward fall (c) Leftward fall (d) Rightward fall
will stop in time duration 119905threshold and then the sum accel-eration is |a| asymp 119892 as the elderly will lie on the ground Thenthe acceleration a is recorded as gafter Quaternion rotation 120579will be calculated based on information gbefore and gafter Atlast the system will consider it as a fall if the rotation angle|120579| asymp 90
∘
4 Implementation
41 Hardware ADIrsquos digital triaxial accelerometer ADXL345is themotion sensor used in this systemTheGPS service andGSM communication function are integrated in SIMComrsquos
SIM908 module TIrsquos 16 bits MCU MSP430F1611 is used tocontrol the whole system and imply the detection algorithm[19]
The measurement range of accelerometer could be set atplusmn2 g plusmn4 g plusmn8 g or plusmn16 g and the maximal sampling rate is32 kHz As humanrsquos activities are normally at low frequencybands [20] 100Hz is a proper sampling rate for human falldetection There is an inner digital filter in ADXL345 whichcould weaken noise and reduce the burden of digital signalprocessing inMCU to some extentThemeasurementswill besent through IIC (interintegrated circuit) bus communicationbetween the sensor and the MCU
8 International Journal of Telemedicine and Applications
SIM908 can offer GPS and GSM service on serial portcommunicationwithMCU and it can also work in low powermode
Each hardware component of the wearable device isworking under low voltage and the detection algorithmdoes not need complex calculation resource so the powerconsumption of the whole device is quite low A 1200mAh37 V polymer lithium battery is quite enough to provide theneed of the wearable device for a couple of days
Hardware structure of the detection device is shown inFigure 6 and the PCB board prototype is shown in Figure 7
42 Software The software design of the system can bedivided into two parts One of them is the software designin wearable device and the other is in the caregiverrsquos handset
421 Wearable Device Flow diagram of the wearable devicesoftware is shown in Figure 8
After initialization of the system gbefore would beextracted from acceleration measurements by using a lowpass filter when the elderly is standing After that the falldetection algorithmwill be applied If a fall has been detectedthe wearable device will locate the user and send alarmshort message to caregivers immediatelyThen the device willremind the elderly through vibration If the user withdrawsthe alarm by pressing a button manually the device will getback to fall detection state and a short message will be sent toinform the caregivers
422 Caregiverrsquos Handset There is aURL (universal resourcelocator) which links to a webmap in the alarm shortmessageThe fall location information will be highlighted on a webmap when the caregiver opens this link
5 System Test
System test of the fall detection system has been conductedbased on the system design described above
51 Wearable Device and Fall Detection Algorithm Thesampling rate of accelerometer is set at 100Hz and themeasurement range is plusmn16 g with a maximum precision of4mg MCU will read raw measurements from sensorrsquos innerFIFO and apply the detection algorithm
The test objects are three different volunteers at the agesof 23 42 and 60 respectively Based on analysis of thesevolunteersrsquo experiment data 119886threshold and 119905threshold are set as2 g and 2 s respectively In order to get g when standing andlying after the fall sum acceleration a which has magnitudebetween (1minus03) g and (1+03) g will be considered as gbeforeand gafter Considering that the tilt of the ground or the lyingposture of the elderly may affect the rotation angle rotationangle 120579 between (90 minus 30)∘ and (90 + 30)∘ will infer that theelderly has fallen
System test contains five kinds of activities of daily living(ie walking jumping squatting sitting and resting) andfour kinds of fallings (ie forward backward leftward andrightward)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
Figure 10 Resting
Table 1 Test results for four kinds of falling and five kinds of ADL
Motion typeAlarm timestest times
Proposed designAcceleration
threshold baseddesign
Forward fall 6060 5960Backward fall 5660 5460Leftward fall 5860 5260Rightward fall 5960 5560Walking 060 460Jumping 060 1160Squatting 060 060Sitting 060 960Resting 560 1060
Each kind of motion has been repeated 20 times on eachvolunteer and the detection results of the proposed algorithmand an acceleration threshold based algorithm [13] are listedin Table 1
The sensitivity and specificity [21 22] of the proposedsystem can be got from the test data in Table 1 Sensitivityof the proposed algorithm is 971 and the specificity is983 Test results of acceleration threshold based algorithmshow lower sensitivity and specificity at 916 and 887respectively
Figure 9 shows the accelerations in different kinds offallings which all trigger the fall alarm correctly and thecorresponding rotation angles are 919∘ minus1005∘ 1047∘ andminus1141∘
Figure 10 shows acceleration during activity of lying downand resting which has rotation angle of minus1170∘ and similar
International Journal of Telemedicine and Applications 9
0 05 1 15 2minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2minus10
minus5
0
5
10
15
Time (s)
Acce
lera
tion
(g)
(b)
0 05 1 15 2 25 3 35 4minus2
minus1
0
1
2
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(c)
0 05 1 15 2minus4
minus3
minus2
minus1
0
1
2
3
4
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(d)
Figure 11 Acceleration waveform during ADL (a) Walking (b) Jumping (c) Squatting (d) Sitting
waveform to falling [23] but the peak acceleration is muchlower Fall alarm has not been triggered yet at this situation
Figure 11 shows acceleration during otherADL testsTheyall do not have rotation about 90∘ even some of the peakvalues are quite high so the fall alarm has not been triggered
52 Location Based Service Alarm receiving function oncaregiverrsquos handset has also been tested An alarm SMS (shortmessage service) containing a map URL has been receivedby the handset as shown in Figure 12 when a fall has beendetected Clicking the URL will open a map in Web browseron which the fall location will be displayed accurately asshown in Figure 13
6 Conclusion
This paper developed a fall detection system based on a singletriaxial accelerometer based wearable deviceThere is no spe-cial requirement of the devicersquosmounting orientation becausethe algorithm does not claim the axes of accelerometer to befixed strictly The system has low power consumed hardwaredesign and highly efficient algorithm which could extendthe service time of the wearable device Both the hardwareand software designs are suitable for wearable and outdoorapplication
As normal activity of resting also has similar rotationas falling it may trigger fall alarm when the body hits
10 International Journal of Telemedicine and Applications
Figure 12 Fall alarm SMS which contains fall location URL
Figure 13 Fall location displayed on a Web map
ground heavily So the choice of 119886threshold is quite importantto distinguish falling from heavily lying activity Sufficientsample number collected from subjects with different ageand gender will improve the reliability and robustness of thethreshold Beside these technologies such as SVMand neuralnetwork are considerable to seek out a proper classificationmethod based on the features used in this system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is partially supported by the Open ResearchFund of the Academy of Satellite Application under Grantno 2014 CXJJ-DH 07 the Scientific Research Foundation forthe Returned Overseas Chinese Scholars State EducationMinistry and the Specialized Research Fund for the DoctoralProgram of High Education China
References
[1] M K Karlsson H Magnusson T von Schewelov and BE Rosengren ldquoPrevention of falls in the elderlymdasha reviewrdquoOsteoporosis International vol 24 no 3 pp 747ndash762 2013
[2] T Shany S J Redmond M R Narayanan and N H LovellldquoSensors-based wearable systems for monitoring of humanmovement and fallsrdquo IEEE Sensors Journal vol 12 no 3 pp658ndash670 2012
[3] M Mubashir L Shao and L Seed ldquoA survey on fall detectionprinciples and approachesrdquo Neurocomputing vol 100 pp 144ndash152 2013
[4] M Grassi A Lombardi G Rescio et al ldquoAn integrated systemfor people fall-detection with data fusion capabilities based on3D ToF camera and wireless accelerometerrdquo in Proceedings ofthe 9th IEEE Sensors Conference (SENSORS rsquo10) pp 1016ndash1019Kona Hawaii USA November 2010
[5] A K Bourke K OrsquoDonovan A Clifford et al ldquoOptimumgravity vector and vertical acceleration estimation using a tri-axial accelerometer for falls and normal activitiesrdquo in AnnualInternational Conference of the IEEE Engineering in Medicineand Biology Society (EMBC rsquo11) pp 7896ndash7899 Boston MassUSA 2011
[6] G Anania A Tognetti N Carbonaro et al ldquoDevelopmentof a novel algorithm for human fall detection using wearablesensorsrdquo inProceedings of the IEEE Sensors pp 1336ndash1339 IEEELecce Italy October 2009
[7] L Qiang J A Stankovic M A Hanson A T Barth J Lachand G Zhou ldquoAccurate fast fall detection using gyroscopes andaccelerometer-derived posture informationrdquo in Proceedings ofthe 6th International Workshop on Wearable and ImplantableBody Sensor Networks (BSN rsquo09) pp 138ndash143 Berkeley CalifUSA June 2009
[8] S Sabatelli M Galgani L Fanucci and A Rocchi ldquoA double-stage kalman filter for orientation tracking with an integratedprocessor in 9-D IMUrdquo IEEE Transactions on Instrumentationand Measurement vol 62 no 3 pp 590ndash598 2013
[9] F Bianchi S J RedmondMRNarayanan S Cerutti andNHLovell ldquoBarometric pressure and triaxial accelerometry-basedfalls event detectionrdquo IEEE Transactions on Neural Systems andRehabilitation Engineering vol 18 no 6 pp 619ndash627 2010
[10] S-L Hsieh K-R Chen C-L Yeh et al ldquoAn unfixed-positionsmartphone-based fall detection schemerdquo in Proceedings of theIEEE International Conference on Systems Man and Cybernetics(SMC rsquo14) pp 2077ndash2081 San Diego Calif USA 2014
[11] S D Bersch C M J Chislett D Azzi R Kusainov and JS Briggs ldquoActivity detection using frequency analysis and off-the-shelf devices fall detection from accelerometer datardquo inProceedings of the 5th International Conference on PervasiveComputing Technologies for Healthcare and Workshops (Perva-siveHealth rsquo11) pp 362ndash365 Dublin Ireland May 2011
[12] A H Khandoker D Lai R K Begg and M Palaniswami ldquoAwavelet-based approach for screening falls risk in the elderlyusing support vector machinesrdquo in Proceedings of the 4thInternational Conference on Intelligent Sensing and InformationProcessing (ICISIP rsquo06) pp 184ndash189 Bangalore India Decem-ber 2006
[13] A K Bourke J V OrsquoBrien and G M Lyons ldquoEvaluation ofa threshold-based tri-axial accelerometer fall detection algo-rithmrdquo Gait and Posture vol 26 no 2 pp 194ndash199 2007
International Journal of Telemedicine and Applications 11
[14] T Zhang JWang L Xu et al ldquofall detection by wearable sensorand one-class SVM algorithmrdquo in Intelligent Computing in Sig-nal Processing and Pattern Recognition International Conferenceon Intelligent Computing ICIC 2006 Kunming China August16ndash19 2006 vol 345 of Lecture Notes in Control and InformationSciences pp 858ndash863 Springer Berlin Germany 2006
[15] S Abbate M Avvenuti F Bonatesta G Cola P Corsini and AVecchio ldquoA smartphone-based fall detection systemrdquo Pervasiveand Mobile Computing vol 8 no 6 pp 883ndash899 2012
[16] A M Sabatini ldquoQuaternion-based strap-down integrationmethod for applications of inertial sensing to gait analysisrdquoMedical and Biological Engineering and Computing vol 43 no1 pp 94ndash101 2005
[17] J VinceQuaternions for Computer Graphics Springer LondonUK 2011
[18] J Chen K Karric D Chang et al ldquoWearable sensors for reliablefall detectionrdquo in Proceedings of the 27th Annual InternationalConference of the Engineering in Medicine and Biology Society(EMBS rsquo05) pp 3551ndash3554 Shanghai China 2005
[19] F Wu C Hu H Zhao and Y Zhao ldquoDevelopment of a fallalarm system based onmulti-sensor integrationrdquo in Proceedingsof the 25th International Technical Meeting of the SatelliteDivision of the Institute of Navigation (IONGNSS rsquo12) pp 3805ndash3813 Nashville Tenn USA September 2012
[20] C V C Bouten K T M Koekkoek M Verduin R Koddeand J D Janssen ldquoA triaxial accelerometer and portable dataprocessing unit for the assessment of daily physical activityrdquoIEEE Transactions on Biomedical Engineering vol 44 no 3 pp136ndash147 1997
[21] M Kangas I Vikman JWiklander P Lindgren L Nyberg andT Jamsa ldquoSensitivity and specificity of fall detection in peopleaged 40 years and overrdquo Gait amp Posture vol 29 no 4 pp 571ndash574 2009
[22] P Jantaraprim P Phukpattaranont C Limsakul and BWongkittisuksa ldquoEvaluation of fall detection for the elderly on avariety of subject groupsrdquo in Proceedings of the 3rd InternationalConvention on Rehabilitation Engineering amp Assistive Technol-ogy (ICREATE rsquo09) pp 1ndash4 Singapore April 2009
[23] S Abbate M Avvenuti G Cola et al ldquoRecognition of falsealarms in fall detection systemsrdquo in Consumer Communicationsand Networking Conference (CCNC rsquo11) pp 23ndash28 Las VegasNev USA 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
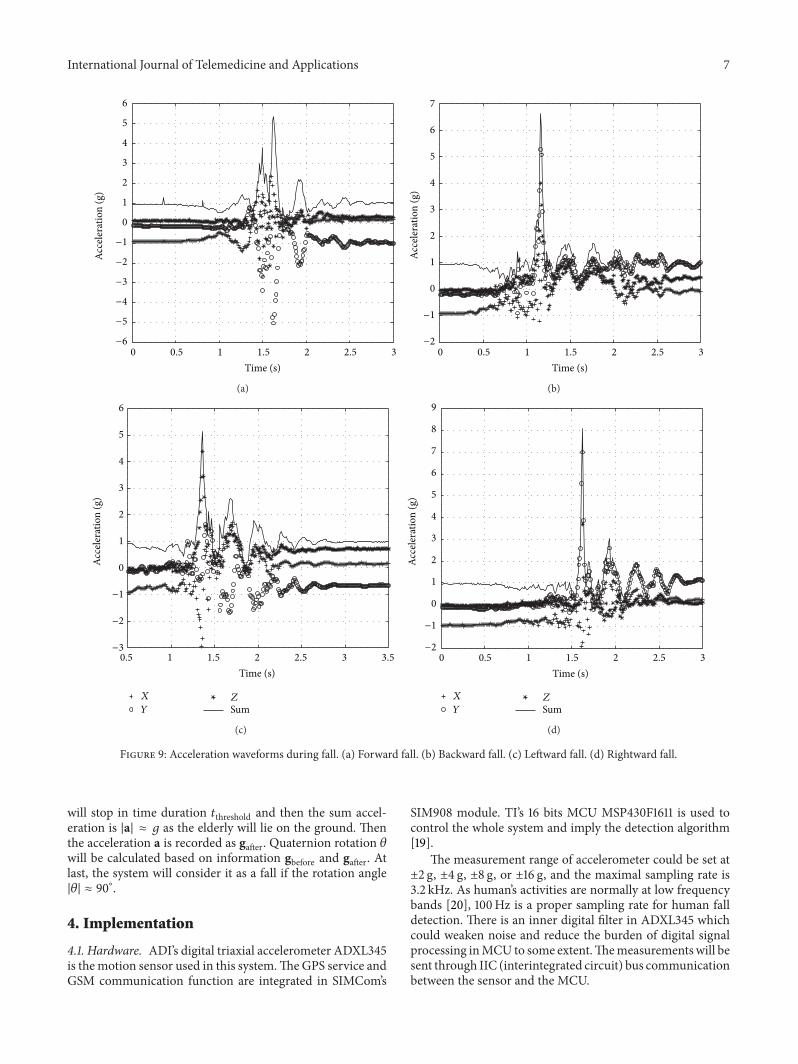
International Journal of Telemedicine and Applications 7
0 05 1 15 2 25 3minus6
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
Time (s)
Acce
lera
tion
(g)
(b)
05 1 15 2 25 3 35minus3
minus2
minus1
0
1
2
3
4
5
6
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(c)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
4
5
6
7
8
9
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
(d)
Figure 9 Acceleration waveforms during fall (a) Forward fall (b) Backward fall (c) Leftward fall (d) Rightward fall
will stop in time duration 119905threshold and then the sum accel-eration is |a| asymp 119892 as the elderly will lie on the ground Thenthe acceleration a is recorded as gafter Quaternion rotation 120579will be calculated based on information gbefore and gafter Atlast the system will consider it as a fall if the rotation angle|120579| asymp 90
∘
4 Implementation
41 Hardware ADIrsquos digital triaxial accelerometer ADXL345is themotion sensor used in this systemTheGPS service andGSM communication function are integrated in SIMComrsquos
SIM908 module TIrsquos 16 bits MCU MSP430F1611 is used tocontrol the whole system and imply the detection algorithm[19]
The measurement range of accelerometer could be set atplusmn2 g plusmn4 g plusmn8 g or plusmn16 g and the maximal sampling rate is32 kHz As humanrsquos activities are normally at low frequencybands [20] 100Hz is a proper sampling rate for human falldetection There is an inner digital filter in ADXL345 whichcould weaken noise and reduce the burden of digital signalprocessing inMCU to some extentThemeasurementswill besent through IIC (interintegrated circuit) bus communicationbetween the sensor and the MCU
8 International Journal of Telemedicine and Applications
SIM908 can offer GPS and GSM service on serial portcommunicationwithMCU and it can also work in low powermode
Each hardware component of the wearable device isworking under low voltage and the detection algorithmdoes not need complex calculation resource so the powerconsumption of the whole device is quite low A 1200mAh37 V polymer lithium battery is quite enough to provide theneed of the wearable device for a couple of days
Hardware structure of the detection device is shown inFigure 6 and the PCB board prototype is shown in Figure 7
42 Software The software design of the system can bedivided into two parts One of them is the software designin wearable device and the other is in the caregiverrsquos handset
421 Wearable Device Flow diagram of the wearable devicesoftware is shown in Figure 8
After initialization of the system gbefore would beextracted from acceleration measurements by using a lowpass filter when the elderly is standing After that the falldetection algorithmwill be applied If a fall has been detectedthe wearable device will locate the user and send alarmshort message to caregivers immediatelyThen the device willremind the elderly through vibration If the user withdrawsthe alarm by pressing a button manually the device will getback to fall detection state and a short message will be sent toinform the caregivers
422 Caregiverrsquos Handset There is aURL (universal resourcelocator) which links to a webmap in the alarm shortmessageThe fall location information will be highlighted on a webmap when the caregiver opens this link
5 System Test
System test of the fall detection system has been conductedbased on the system design described above
51 Wearable Device and Fall Detection Algorithm Thesampling rate of accelerometer is set at 100Hz and themeasurement range is plusmn16 g with a maximum precision of4mg MCU will read raw measurements from sensorrsquos innerFIFO and apply the detection algorithm
The test objects are three different volunteers at the agesof 23 42 and 60 respectively Based on analysis of thesevolunteersrsquo experiment data 119886threshold and 119905threshold are set as2 g and 2 s respectively In order to get g when standing andlying after the fall sum acceleration a which has magnitudebetween (1minus03) g and (1+03) g will be considered as gbeforeand gafter Considering that the tilt of the ground or the lyingposture of the elderly may affect the rotation angle rotationangle 120579 between (90 minus 30)∘ and (90 + 30)∘ will infer that theelderly has fallen
System test contains five kinds of activities of daily living(ie walking jumping squatting sitting and resting) andfour kinds of fallings (ie forward backward leftward andrightward)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
Figure 10 Resting
Table 1 Test results for four kinds of falling and five kinds of ADL
Motion typeAlarm timestest times
Proposed designAcceleration
threshold baseddesign
Forward fall 6060 5960Backward fall 5660 5460Leftward fall 5860 5260Rightward fall 5960 5560Walking 060 460Jumping 060 1160Squatting 060 060Sitting 060 960Resting 560 1060
Each kind of motion has been repeated 20 times on eachvolunteer and the detection results of the proposed algorithmand an acceleration threshold based algorithm [13] are listedin Table 1
The sensitivity and specificity [21 22] of the proposedsystem can be got from the test data in Table 1 Sensitivityof the proposed algorithm is 971 and the specificity is983 Test results of acceleration threshold based algorithmshow lower sensitivity and specificity at 916 and 887respectively
Figure 9 shows the accelerations in different kinds offallings which all trigger the fall alarm correctly and thecorresponding rotation angles are 919∘ minus1005∘ 1047∘ andminus1141∘
Figure 10 shows acceleration during activity of lying downand resting which has rotation angle of minus1170∘ and similar
International Journal of Telemedicine and Applications 9
0 05 1 15 2minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2minus10
minus5
0
5
10
15
Time (s)
Acce
lera
tion
(g)
(b)
0 05 1 15 2 25 3 35 4minus2
minus1
0
1
2
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(c)
0 05 1 15 2minus4
minus3
minus2
minus1
0
1
2
3
4
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(d)
Figure 11 Acceleration waveform during ADL (a) Walking (b) Jumping (c) Squatting (d) Sitting
waveform to falling [23] but the peak acceleration is muchlower Fall alarm has not been triggered yet at this situation
Figure 11 shows acceleration during otherADL testsTheyall do not have rotation about 90∘ even some of the peakvalues are quite high so the fall alarm has not been triggered
52 Location Based Service Alarm receiving function oncaregiverrsquos handset has also been tested An alarm SMS (shortmessage service) containing a map URL has been receivedby the handset as shown in Figure 12 when a fall has beendetected Clicking the URL will open a map in Web browseron which the fall location will be displayed accurately asshown in Figure 13
6 Conclusion
This paper developed a fall detection system based on a singletriaxial accelerometer based wearable deviceThere is no spe-cial requirement of the devicersquosmounting orientation becausethe algorithm does not claim the axes of accelerometer to befixed strictly The system has low power consumed hardwaredesign and highly efficient algorithm which could extendthe service time of the wearable device Both the hardwareand software designs are suitable for wearable and outdoorapplication
As normal activity of resting also has similar rotationas falling it may trigger fall alarm when the body hits
10 International Journal of Telemedicine and Applications
Figure 12 Fall alarm SMS which contains fall location URL
Figure 13 Fall location displayed on a Web map
ground heavily So the choice of 119886threshold is quite importantto distinguish falling from heavily lying activity Sufficientsample number collected from subjects with different ageand gender will improve the reliability and robustness of thethreshold Beside these technologies such as SVMand neuralnetwork are considerable to seek out a proper classificationmethod based on the features used in this system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is partially supported by the Open ResearchFund of the Academy of Satellite Application under Grantno 2014 CXJJ-DH 07 the Scientific Research Foundation forthe Returned Overseas Chinese Scholars State EducationMinistry and the Specialized Research Fund for the DoctoralProgram of High Education China
References
[1] M K Karlsson H Magnusson T von Schewelov and BE Rosengren ldquoPrevention of falls in the elderlymdasha reviewrdquoOsteoporosis International vol 24 no 3 pp 747ndash762 2013
[2] T Shany S J Redmond M R Narayanan and N H LovellldquoSensors-based wearable systems for monitoring of humanmovement and fallsrdquo IEEE Sensors Journal vol 12 no 3 pp658ndash670 2012
[3] M Mubashir L Shao and L Seed ldquoA survey on fall detectionprinciples and approachesrdquo Neurocomputing vol 100 pp 144ndash152 2013
[4] M Grassi A Lombardi G Rescio et al ldquoAn integrated systemfor people fall-detection with data fusion capabilities based on3D ToF camera and wireless accelerometerrdquo in Proceedings ofthe 9th IEEE Sensors Conference (SENSORS rsquo10) pp 1016ndash1019Kona Hawaii USA November 2010
[5] A K Bourke K OrsquoDonovan A Clifford et al ldquoOptimumgravity vector and vertical acceleration estimation using a tri-axial accelerometer for falls and normal activitiesrdquo in AnnualInternational Conference of the IEEE Engineering in Medicineand Biology Society (EMBC rsquo11) pp 7896ndash7899 Boston MassUSA 2011
[6] G Anania A Tognetti N Carbonaro et al ldquoDevelopmentof a novel algorithm for human fall detection using wearablesensorsrdquo inProceedings of the IEEE Sensors pp 1336ndash1339 IEEELecce Italy October 2009
[7] L Qiang J A Stankovic M A Hanson A T Barth J Lachand G Zhou ldquoAccurate fast fall detection using gyroscopes andaccelerometer-derived posture informationrdquo in Proceedings ofthe 6th International Workshop on Wearable and ImplantableBody Sensor Networks (BSN rsquo09) pp 138ndash143 Berkeley CalifUSA June 2009
[8] S Sabatelli M Galgani L Fanucci and A Rocchi ldquoA double-stage kalman filter for orientation tracking with an integratedprocessor in 9-D IMUrdquo IEEE Transactions on Instrumentationand Measurement vol 62 no 3 pp 590ndash598 2013
[9] F Bianchi S J RedmondMRNarayanan S Cerutti andNHLovell ldquoBarometric pressure and triaxial accelerometry-basedfalls event detectionrdquo IEEE Transactions on Neural Systems andRehabilitation Engineering vol 18 no 6 pp 619ndash627 2010
[10] S-L Hsieh K-R Chen C-L Yeh et al ldquoAn unfixed-positionsmartphone-based fall detection schemerdquo in Proceedings of theIEEE International Conference on Systems Man and Cybernetics(SMC rsquo14) pp 2077ndash2081 San Diego Calif USA 2014
[11] S D Bersch C M J Chislett D Azzi R Kusainov and JS Briggs ldquoActivity detection using frequency analysis and off-the-shelf devices fall detection from accelerometer datardquo inProceedings of the 5th International Conference on PervasiveComputing Technologies for Healthcare and Workshops (Perva-siveHealth rsquo11) pp 362ndash365 Dublin Ireland May 2011
[12] A H Khandoker D Lai R K Begg and M Palaniswami ldquoAwavelet-based approach for screening falls risk in the elderlyusing support vector machinesrdquo in Proceedings of the 4thInternational Conference on Intelligent Sensing and InformationProcessing (ICISIP rsquo06) pp 184ndash189 Bangalore India Decem-ber 2006
[13] A K Bourke J V OrsquoBrien and G M Lyons ldquoEvaluation ofa threshold-based tri-axial accelerometer fall detection algo-rithmrdquo Gait and Posture vol 26 no 2 pp 194ndash199 2007
International Journal of Telemedicine and Applications 11
[14] T Zhang JWang L Xu et al ldquofall detection by wearable sensorand one-class SVM algorithmrdquo in Intelligent Computing in Sig-nal Processing and Pattern Recognition International Conferenceon Intelligent Computing ICIC 2006 Kunming China August16ndash19 2006 vol 345 of Lecture Notes in Control and InformationSciences pp 858ndash863 Springer Berlin Germany 2006
[15] S Abbate M Avvenuti F Bonatesta G Cola P Corsini and AVecchio ldquoA smartphone-based fall detection systemrdquo Pervasiveand Mobile Computing vol 8 no 6 pp 883ndash899 2012
[16] A M Sabatini ldquoQuaternion-based strap-down integrationmethod for applications of inertial sensing to gait analysisrdquoMedical and Biological Engineering and Computing vol 43 no1 pp 94ndash101 2005
[17] J VinceQuaternions for Computer Graphics Springer LondonUK 2011
[18] J Chen K Karric D Chang et al ldquoWearable sensors for reliablefall detectionrdquo in Proceedings of the 27th Annual InternationalConference of the Engineering in Medicine and Biology Society(EMBS rsquo05) pp 3551ndash3554 Shanghai China 2005
[19] F Wu C Hu H Zhao and Y Zhao ldquoDevelopment of a fallalarm system based onmulti-sensor integrationrdquo in Proceedingsof the 25th International Technical Meeting of the SatelliteDivision of the Institute of Navigation (IONGNSS rsquo12) pp 3805ndash3813 Nashville Tenn USA September 2012
[20] C V C Bouten K T M Koekkoek M Verduin R Koddeand J D Janssen ldquoA triaxial accelerometer and portable dataprocessing unit for the assessment of daily physical activityrdquoIEEE Transactions on Biomedical Engineering vol 44 no 3 pp136ndash147 1997
[21] M Kangas I Vikman JWiklander P Lindgren L Nyberg andT Jamsa ldquoSensitivity and specificity of fall detection in peopleaged 40 years and overrdquo Gait amp Posture vol 29 no 4 pp 571ndash574 2009
[22] P Jantaraprim P Phukpattaranont C Limsakul and BWongkittisuksa ldquoEvaluation of fall detection for the elderly on avariety of subject groupsrdquo in Proceedings of the 3rd InternationalConvention on Rehabilitation Engineering amp Assistive Technol-ogy (ICREATE rsquo09) pp 1ndash4 Singapore April 2009
[23] S Abbate M Avvenuti G Cola et al ldquoRecognition of falsealarms in fall detection systemsrdquo in Consumer Communicationsand Networking Conference (CCNC rsquo11) pp 23ndash28 Las VegasNev USA 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
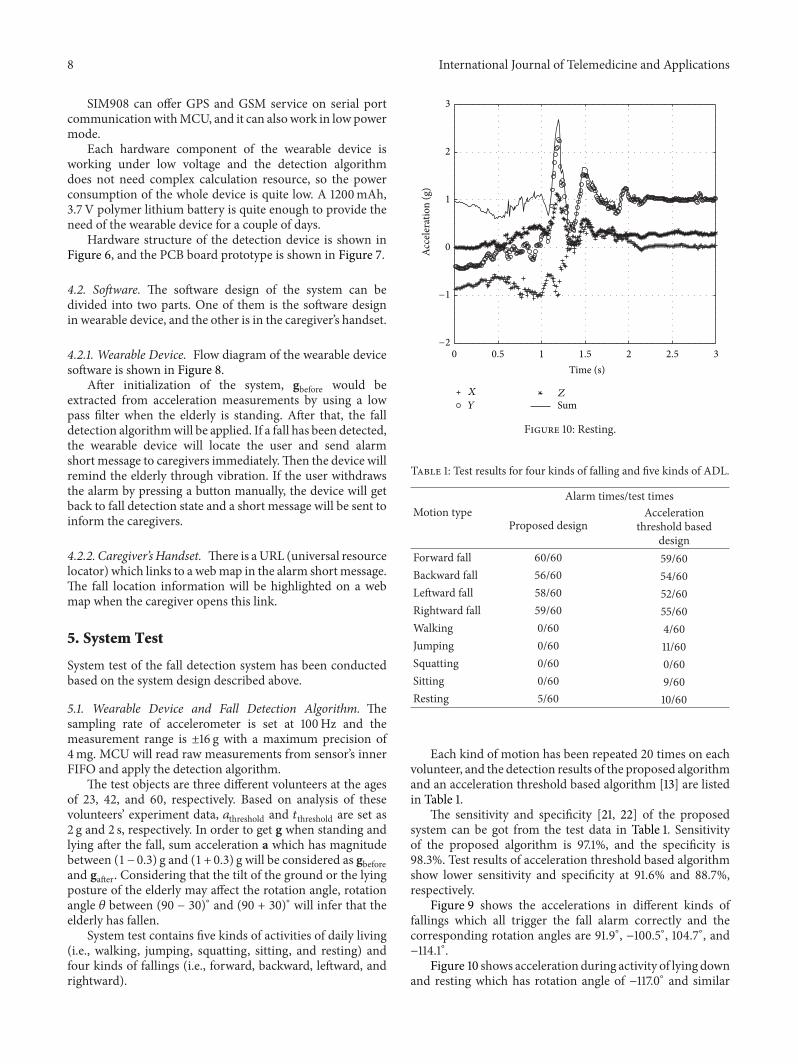
8 International Journal of Telemedicine and Applications
SIM908 can offer GPS and GSM service on serial portcommunicationwithMCU and it can also work in low powermode
Each hardware component of the wearable device isworking under low voltage and the detection algorithmdoes not need complex calculation resource so the powerconsumption of the whole device is quite low A 1200mAh37 V polymer lithium battery is quite enough to provide theneed of the wearable device for a couple of days
Hardware structure of the detection device is shown inFigure 6 and the PCB board prototype is shown in Figure 7
42 Software The software design of the system can bedivided into two parts One of them is the software designin wearable device and the other is in the caregiverrsquos handset
421 Wearable Device Flow diagram of the wearable devicesoftware is shown in Figure 8
After initialization of the system gbefore would beextracted from acceleration measurements by using a lowpass filter when the elderly is standing After that the falldetection algorithmwill be applied If a fall has been detectedthe wearable device will locate the user and send alarmshort message to caregivers immediatelyThen the device willremind the elderly through vibration If the user withdrawsthe alarm by pressing a button manually the device will getback to fall detection state and a short message will be sent toinform the caregivers
422 Caregiverrsquos Handset There is aURL (universal resourcelocator) which links to a webmap in the alarm shortmessageThe fall location information will be highlighted on a webmap when the caregiver opens this link
5 System Test
System test of the fall detection system has been conductedbased on the system design described above
51 Wearable Device and Fall Detection Algorithm Thesampling rate of accelerometer is set at 100Hz and themeasurement range is plusmn16 g with a maximum precision of4mg MCU will read raw measurements from sensorrsquos innerFIFO and apply the detection algorithm
The test objects are three different volunteers at the agesof 23 42 and 60 respectively Based on analysis of thesevolunteersrsquo experiment data 119886threshold and 119905threshold are set as2 g and 2 s respectively In order to get g when standing andlying after the fall sum acceleration a which has magnitudebetween (1minus03) g and (1+03) g will be considered as gbeforeand gafter Considering that the tilt of the ground or the lyingposture of the elderly may affect the rotation angle rotationangle 120579 between (90 minus 30)∘ and (90 + 30)∘ will infer that theelderly has fallen
System test contains five kinds of activities of daily living(ie walking jumping squatting sitting and resting) andfour kinds of fallings (ie forward backward leftward andrightward)
0 05 1 15 2 25 3minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
X
Y
Z
Sum
Figure 10 Resting
Table 1 Test results for four kinds of falling and five kinds of ADL
Motion typeAlarm timestest times
Proposed designAcceleration
threshold baseddesign
Forward fall 6060 5960Backward fall 5660 5460Leftward fall 5860 5260Rightward fall 5960 5560Walking 060 460Jumping 060 1160Squatting 060 060Sitting 060 960Resting 560 1060
Each kind of motion has been repeated 20 times on eachvolunteer and the detection results of the proposed algorithmand an acceleration threshold based algorithm [13] are listedin Table 1
The sensitivity and specificity [21 22] of the proposedsystem can be got from the test data in Table 1 Sensitivityof the proposed algorithm is 971 and the specificity is983 Test results of acceleration threshold based algorithmshow lower sensitivity and specificity at 916 and 887respectively
Figure 9 shows the accelerations in different kinds offallings which all trigger the fall alarm correctly and thecorresponding rotation angles are 919∘ minus1005∘ 1047∘ andminus1141∘
Figure 10 shows acceleration during activity of lying downand resting which has rotation angle of minus1170∘ and similar
International Journal of Telemedicine and Applications 9
0 05 1 15 2minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2minus10
minus5
0
5
10
15
Time (s)
Acce
lera
tion
(g)
(b)
0 05 1 15 2 25 3 35 4minus2
minus1
0
1
2
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(c)
0 05 1 15 2minus4
minus3
minus2
minus1
0
1
2
3
4
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(d)
Figure 11 Acceleration waveform during ADL (a) Walking (b) Jumping (c) Squatting (d) Sitting
waveform to falling [23] but the peak acceleration is muchlower Fall alarm has not been triggered yet at this situation
Figure 11 shows acceleration during otherADL testsTheyall do not have rotation about 90∘ even some of the peakvalues are quite high so the fall alarm has not been triggered
52 Location Based Service Alarm receiving function oncaregiverrsquos handset has also been tested An alarm SMS (shortmessage service) containing a map URL has been receivedby the handset as shown in Figure 12 when a fall has beendetected Clicking the URL will open a map in Web browseron which the fall location will be displayed accurately asshown in Figure 13
6 Conclusion
This paper developed a fall detection system based on a singletriaxial accelerometer based wearable deviceThere is no spe-cial requirement of the devicersquosmounting orientation becausethe algorithm does not claim the axes of accelerometer to befixed strictly The system has low power consumed hardwaredesign and highly efficient algorithm which could extendthe service time of the wearable device Both the hardwareand software designs are suitable for wearable and outdoorapplication
As normal activity of resting also has similar rotationas falling it may trigger fall alarm when the body hits
10 International Journal of Telemedicine and Applications
Figure 12 Fall alarm SMS which contains fall location URL
Figure 13 Fall location displayed on a Web map
ground heavily So the choice of 119886threshold is quite importantto distinguish falling from heavily lying activity Sufficientsample number collected from subjects with different ageand gender will improve the reliability and robustness of thethreshold Beside these technologies such as SVMand neuralnetwork are considerable to seek out a proper classificationmethod based on the features used in this system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is partially supported by the Open ResearchFund of the Academy of Satellite Application under Grantno 2014 CXJJ-DH 07 the Scientific Research Foundation forthe Returned Overseas Chinese Scholars State EducationMinistry and the Specialized Research Fund for the DoctoralProgram of High Education China
References
[1] M K Karlsson H Magnusson T von Schewelov and BE Rosengren ldquoPrevention of falls in the elderlymdasha reviewrdquoOsteoporosis International vol 24 no 3 pp 747ndash762 2013
[2] T Shany S J Redmond M R Narayanan and N H LovellldquoSensors-based wearable systems for monitoring of humanmovement and fallsrdquo IEEE Sensors Journal vol 12 no 3 pp658ndash670 2012
[3] M Mubashir L Shao and L Seed ldquoA survey on fall detectionprinciples and approachesrdquo Neurocomputing vol 100 pp 144ndash152 2013
[4] M Grassi A Lombardi G Rescio et al ldquoAn integrated systemfor people fall-detection with data fusion capabilities based on3D ToF camera and wireless accelerometerrdquo in Proceedings ofthe 9th IEEE Sensors Conference (SENSORS rsquo10) pp 1016ndash1019Kona Hawaii USA November 2010
[5] A K Bourke K OrsquoDonovan A Clifford et al ldquoOptimumgravity vector and vertical acceleration estimation using a tri-axial accelerometer for falls and normal activitiesrdquo in AnnualInternational Conference of the IEEE Engineering in Medicineand Biology Society (EMBC rsquo11) pp 7896ndash7899 Boston MassUSA 2011
[6] G Anania A Tognetti N Carbonaro et al ldquoDevelopmentof a novel algorithm for human fall detection using wearablesensorsrdquo inProceedings of the IEEE Sensors pp 1336ndash1339 IEEELecce Italy October 2009
[7] L Qiang J A Stankovic M A Hanson A T Barth J Lachand G Zhou ldquoAccurate fast fall detection using gyroscopes andaccelerometer-derived posture informationrdquo in Proceedings ofthe 6th International Workshop on Wearable and ImplantableBody Sensor Networks (BSN rsquo09) pp 138ndash143 Berkeley CalifUSA June 2009
[8] S Sabatelli M Galgani L Fanucci and A Rocchi ldquoA double-stage kalman filter for orientation tracking with an integratedprocessor in 9-D IMUrdquo IEEE Transactions on Instrumentationand Measurement vol 62 no 3 pp 590ndash598 2013
[9] F Bianchi S J RedmondMRNarayanan S Cerutti andNHLovell ldquoBarometric pressure and triaxial accelerometry-basedfalls event detectionrdquo IEEE Transactions on Neural Systems andRehabilitation Engineering vol 18 no 6 pp 619ndash627 2010
[10] S-L Hsieh K-R Chen C-L Yeh et al ldquoAn unfixed-positionsmartphone-based fall detection schemerdquo in Proceedings of theIEEE International Conference on Systems Man and Cybernetics(SMC rsquo14) pp 2077ndash2081 San Diego Calif USA 2014
[11] S D Bersch C M J Chislett D Azzi R Kusainov and JS Briggs ldquoActivity detection using frequency analysis and off-the-shelf devices fall detection from accelerometer datardquo inProceedings of the 5th International Conference on PervasiveComputing Technologies for Healthcare and Workshops (Perva-siveHealth rsquo11) pp 362ndash365 Dublin Ireland May 2011
[12] A H Khandoker D Lai R K Begg and M Palaniswami ldquoAwavelet-based approach for screening falls risk in the elderlyusing support vector machinesrdquo in Proceedings of the 4thInternational Conference on Intelligent Sensing and InformationProcessing (ICISIP rsquo06) pp 184ndash189 Bangalore India Decem-ber 2006
[13] A K Bourke J V OrsquoBrien and G M Lyons ldquoEvaluation ofa threshold-based tri-axial accelerometer fall detection algo-rithmrdquo Gait and Posture vol 26 no 2 pp 194ndash199 2007
International Journal of Telemedicine and Applications 11
[14] T Zhang JWang L Xu et al ldquofall detection by wearable sensorand one-class SVM algorithmrdquo in Intelligent Computing in Sig-nal Processing and Pattern Recognition International Conferenceon Intelligent Computing ICIC 2006 Kunming China August16ndash19 2006 vol 345 of Lecture Notes in Control and InformationSciences pp 858ndash863 Springer Berlin Germany 2006
[15] S Abbate M Avvenuti F Bonatesta G Cola P Corsini and AVecchio ldquoA smartphone-based fall detection systemrdquo Pervasiveand Mobile Computing vol 8 no 6 pp 883ndash899 2012
[16] A M Sabatini ldquoQuaternion-based strap-down integrationmethod for applications of inertial sensing to gait analysisrdquoMedical and Biological Engineering and Computing vol 43 no1 pp 94ndash101 2005
[17] J VinceQuaternions for Computer Graphics Springer LondonUK 2011
[18] J Chen K Karric D Chang et al ldquoWearable sensors for reliablefall detectionrdquo in Proceedings of the 27th Annual InternationalConference of the Engineering in Medicine and Biology Society(EMBS rsquo05) pp 3551ndash3554 Shanghai China 2005
[19] F Wu C Hu H Zhao and Y Zhao ldquoDevelopment of a fallalarm system based onmulti-sensor integrationrdquo in Proceedingsof the 25th International Technical Meeting of the SatelliteDivision of the Institute of Navigation (IONGNSS rsquo12) pp 3805ndash3813 Nashville Tenn USA September 2012
[20] C V C Bouten K T M Koekkoek M Verduin R Koddeand J D Janssen ldquoA triaxial accelerometer and portable dataprocessing unit for the assessment of daily physical activityrdquoIEEE Transactions on Biomedical Engineering vol 44 no 3 pp136ndash147 1997
[21] M Kangas I Vikman JWiklander P Lindgren L Nyberg andT Jamsa ldquoSensitivity and specificity of fall detection in peopleaged 40 years and overrdquo Gait amp Posture vol 29 no 4 pp 571ndash574 2009
[22] P Jantaraprim P Phukpattaranont C Limsakul and BWongkittisuksa ldquoEvaluation of fall detection for the elderly on avariety of subject groupsrdquo in Proceedings of the 3rd InternationalConvention on Rehabilitation Engineering amp Assistive Technol-ogy (ICREATE rsquo09) pp 1ndash4 Singapore April 2009
[23] S Abbate M Avvenuti G Cola et al ldquoRecognition of falsealarms in fall detection systemsrdquo in Consumer Communicationsand Networking Conference (CCNC rsquo11) pp 23ndash28 Las VegasNev USA 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of Telemedicine and Applications 9
0 05 1 15 2minus2
minus1
0
1
2
3
Time (s)
Acce
lera
tion
(g)
(a)
0 05 1 15 2minus10
minus5
0
5
10
15
Time (s)
Acce
lera
tion
(g)
(b)
0 05 1 15 2 25 3 35 4minus2
minus1
0
1
2
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(c)
0 05 1 15 2minus4
minus3
minus2
minus1
0
1
2
3
4
Time (s)
Acc
eler
atio
n (g
)
X
Y
Z
Sum
(d)
Figure 11 Acceleration waveform during ADL (a) Walking (b) Jumping (c) Squatting (d) Sitting
waveform to falling [23] but the peak acceleration is muchlower Fall alarm has not been triggered yet at this situation
Figure 11 shows acceleration during otherADL testsTheyall do not have rotation about 90∘ even some of the peakvalues are quite high so the fall alarm has not been triggered
52 Location Based Service Alarm receiving function oncaregiverrsquos handset has also been tested An alarm SMS (shortmessage service) containing a map URL has been receivedby the handset as shown in Figure 12 when a fall has beendetected Clicking the URL will open a map in Web browseron which the fall location will be displayed accurately asshown in Figure 13
6 Conclusion
This paper developed a fall detection system based on a singletriaxial accelerometer based wearable deviceThere is no spe-cial requirement of the devicersquosmounting orientation becausethe algorithm does not claim the axes of accelerometer to befixed strictly The system has low power consumed hardwaredesign and highly efficient algorithm which could extendthe service time of the wearable device Both the hardwareand software designs are suitable for wearable and outdoorapplication
As normal activity of resting also has similar rotationas falling it may trigger fall alarm when the body hits
10 International Journal of Telemedicine and Applications
Figure 12 Fall alarm SMS which contains fall location URL
Figure 13 Fall location displayed on a Web map
ground heavily So the choice of 119886threshold is quite importantto distinguish falling from heavily lying activity Sufficientsample number collected from subjects with different ageand gender will improve the reliability and robustness of thethreshold Beside these technologies such as SVMand neuralnetwork are considerable to seek out a proper classificationmethod based on the features used in this system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is partially supported by the Open ResearchFund of the Academy of Satellite Application under Grantno 2014 CXJJ-DH 07 the Scientific Research Foundation forthe Returned Overseas Chinese Scholars State EducationMinistry and the Specialized Research Fund for the DoctoralProgram of High Education China
References
[1] M K Karlsson H Magnusson T von Schewelov and BE Rosengren ldquoPrevention of falls in the elderlymdasha reviewrdquoOsteoporosis International vol 24 no 3 pp 747ndash762 2013
[2] T Shany S J Redmond M R Narayanan and N H LovellldquoSensors-based wearable systems for monitoring of humanmovement and fallsrdquo IEEE Sensors Journal vol 12 no 3 pp658ndash670 2012
[3] M Mubashir L Shao and L Seed ldquoA survey on fall detectionprinciples and approachesrdquo Neurocomputing vol 100 pp 144ndash152 2013
[4] M Grassi A Lombardi G Rescio et al ldquoAn integrated systemfor people fall-detection with data fusion capabilities based on3D ToF camera and wireless accelerometerrdquo in Proceedings ofthe 9th IEEE Sensors Conference (SENSORS rsquo10) pp 1016ndash1019Kona Hawaii USA November 2010
[5] A K Bourke K OrsquoDonovan A Clifford et al ldquoOptimumgravity vector and vertical acceleration estimation using a tri-axial accelerometer for falls and normal activitiesrdquo in AnnualInternational Conference of the IEEE Engineering in Medicineand Biology Society (EMBC rsquo11) pp 7896ndash7899 Boston MassUSA 2011
[6] G Anania A Tognetti N Carbonaro et al ldquoDevelopmentof a novel algorithm for human fall detection using wearablesensorsrdquo inProceedings of the IEEE Sensors pp 1336ndash1339 IEEELecce Italy October 2009
[7] L Qiang J A Stankovic M A Hanson A T Barth J Lachand G Zhou ldquoAccurate fast fall detection using gyroscopes andaccelerometer-derived posture informationrdquo in Proceedings ofthe 6th International Workshop on Wearable and ImplantableBody Sensor Networks (BSN rsquo09) pp 138ndash143 Berkeley CalifUSA June 2009
[8] S Sabatelli M Galgani L Fanucci and A Rocchi ldquoA double-stage kalman filter for orientation tracking with an integratedprocessor in 9-D IMUrdquo IEEE Transactions on Instrumentationand Measurement vol 62 no 3 pp 590ndash598 2013
[9] F Bianchi S J RedmondMRNarayanan S Cerutti andNHLovell ldquoBarometric pressure and triaxial accelerometry-basedfalls event detectionrdquo IEEE Transactions on Neural Systems andRehabilitation Engineering vol 18 no 6 pp 619ndash627 2010
[10] S-L Hsieh K-R Chen C-L Yeh et al ldquoAn unfixed-positionsmartphone-based fall detection schemerdquo in Proceedings of theIEEE International Conference on Systems Man and Cybernetics(SMC rsquo14) pp 2077ndash2081 San Diego Calif USA 2014
[11] S D Bersch C M J Chislett D Azzi R Kusainov and JS Briggs ldquoActivity detection using frequency analysis and off-the-shelf devices fall detection from accelerometer datardquo inProceedings of the 5th International Conference on PervasiveComputing Technologies for Healthcare and Workshops (Perva-siveHealth rsquo11) pp 362ndash365 Dublin Ireland May 2011
[12] A H Khandoker D Lai R K Begg and M Palaniswami ldquoAwavelet-based approach for screening falls risk in the elderlyusing support vector machinesrdquo in Proceedings of the 4thInternational Conference on Intelligent Sensing and InformationProcessing (ICISIP rsquo06) pp 184ndash189 Bangalore India Decem-ber 2006
[13] A K Bourke J V OrsquoBrien and G M Lyons ldquoEvaluation ofa threshold-based tri-axial accelerometer fall detection algo-rithmrdquo Gait and Posture vol 26 no 2 pp 194ndash199 2007
International Journal of Telemedicine and Applications 11
[14] T Zhang JWang L Xu et al ldquofall detection by wearable sensorand one-class SVM algorithmrdquo in Intelligent Computing in Sig-nal Processing and Pattern Recognition International Conferenceon Intelligent Computing ICIC 2006 Kunming China August16ndash19 2006 vol 345 of Lecture Notes in Control and InformationSciences pp 858ndash863 Springer Berlin Germany 2006
[15] S Abbate M Avvenuti F Bonatesta G Cola P Corsini and AVecchio ldquoA smartphone-based fall detection systemrdquo Pervasiveand Mobile Computing vol 8 no 6 pp 883ndash899 2012
[16] A M Sabatini ldquoQuaternion-based strap-down integrationmethod for applications of inertial sensing to gait analysisrdquoMedical and Biological Engineering and Computing vol 43 no1 pp 94ndash101 2005
[17] J VinceQuaternions for Computer Graphics Springer LondonUK 2011
[18] J Chen K Karric D Chang et al ldquoWearable sensors for reliablefall detectionrdquo in Proceedings of the 27th Annual InternationalConference of the Engineering in Medicine and Biology Society(EMBS rsquo05) pp 3551ndash3554 Shanghai China 2005
[19] F Wu C Hu H Zhao and Y Zhao ldquoDevelopment of a fallalarm system based onmulti-sensor integrationrdquo in Proceedingsof the 25th International Technical Meeting of the SatelliteDivision of the Institute of Navigation (IONGNSS rsquo12) pp 3805ndash3813 Nashville Tenn USA September 2012
[20] C V C Bouten K T M Koekkoek M Verduin R Koddeand J D Janssen ldquoA triaxial accelerometer and portable dataprocessing unit for the assessment of daily physical activityrdquoIEEE Transactions on Biomedical Engineering vol 44 no 3 pp136ndash147 1997
[21] M Kangas I Vikman JWiklander P Lindgren L Nyberg andT Jamsa ldquoSensitivity and specificity of fall detection in peopleaged 40 years and overrdquo Gait amp Posture vol 29 no 4 pp 571ndash574 2009
[22] P Jantaraprim P Phukpattaranont C Limsakul and BWongkittisuksa ldquoEvaluation of fall detection for the elderly on avariety of subject groupsrdquo in Proceedings of the 3rd InternationalConvention on Rehabilitation Engineering amp Assistive Technol-ogy (ICREATE rsquo09) pp 1ndash4 Singapore April 2009
[23] S Abbate M Avvenuti G Cola et al ldquoRecognition of falsealarms in fall detection systemsrdquo in Consumer Communicationsand Networking Conference (CCNC rsquo11) pp 23ndash28 Las VegasNev USA 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
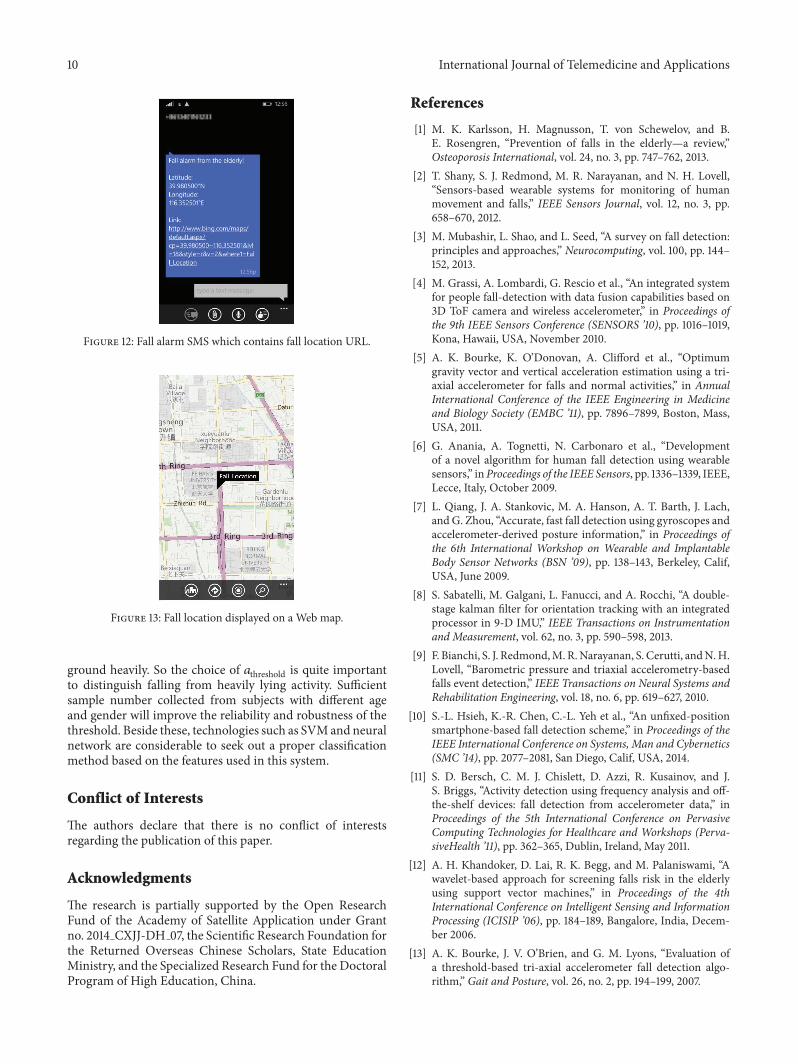
10 International Journal of Telemedicine and Applications
Figure 12 Fall alarm SMS which contains fall location URL
Figure 13 Fall location displayed on a Web map
ground heavily So the choice of 119886threshold is quite importantto distinguish falling from heavily lying activity Sufficientsample number collected from subjects with different ageand gender will improve the reliability and robustness of thethreshold Beside these technologies such as SVMand neuralnetwork are considerable to seek out a proper classificationmethod based on the features used in this system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
The research is partially supported by the Open ResearchFund of the Academy of Satellite Application under Grantno 2014 CXJJ-DH 07 the Scientific Research Foundation forthe Returned Overseas Chinese Scholars State EducationMinistry and the Specialized Research Fund for the DoctoralProgram of High Education China
References
[1] M K Karlsson H Magnusson T von Schewelov and BE Rosengren ldquoPrevention of falls in the elderlymdasha reviewrdquoOsteoporosis International vol 24 no 3 pp 747ndash762 2013
[2] T Shany S J Redmond M R Narayanan and N H LovellldquoSensors-based wearable systems for monitoring of humanmovement and fallsrdquo IEEE Sensors Journal vol 12 no 3 pp658ndash670 2012
[3] M Mubashir L Shao and L Seed ldquoA survey on fall detectionprinciples and approachesrdquo Neurocomputing vol 100 pp 144ndash152 2013
[4] M Grassi A Lombardi G Rescio et al ldquoAn integrated systemfor people fall-detection with data fusion capabilities based on3D ToF camera and wireless accelerometerrdquo in Proceedings ofthe 9th IEEE Sensors Conference (SENSORS rsquo10) pp 1016ndash1019Kona Hawaii USA November 2010
[5] A K Bourke K OrsquoDonovan A Clifford et al ldquoOptimumgravity vector and vertical acceleration estimation using a tri-axial accelerometer for falls and normal activitiesrdquo in AnnualInternational Conference of the IEEE Engineering in Medicineand Biology Society (EMBC rsquo11) pp 7896ndash7899 Boston MassUSA 2011
[6] G Anania A Tognetti N Carbonaro et al ldquoDevelopmentof a novel algorithm for human fall detection using wearablesensorsrdquo inProceedings of the IEEE Sensors pp 1336ndash1339 IEEELecce Italy October 2009
[7] L Qiang J A Stankovic M A Hanson A T Barth J Lachand G Zhou ldquoAccurate fast fall detection using gyroscopes andaccelerometer-derived posture informationrdquo in Proceedings ofthe 6th International Workshop on Wearable and ImplantableBody Sensor Networks (BSN rsquo09) pp 138ndash143 Berkeley CalifUSA June 2009
[8] S Sabatelli M Galgani L Fanucci and A Rocchi ldquoA double-stage kalman filter for orientation tracking with an integratedprocessor in 9-D IMUrdquo IEEE Transactions on Instrumentationand Measurement vol 62 no 3 pp 590ndash598 2013
[9] F Bianchi S J RedmondMRNarayanan S Cerutti andNHLovell ldquoBarometric pressure and triaxial accelerometry-basedfalls event detectionrdquo IEEE Transactions on Neural Systems andRehabilitation Engineering vol 18 no 6 pp 619ndash627 2010
[10] S-L Hsieh K-R Chen C-L Yeh et al ldquoAn unfixed-positionsmartphone-based fall detection schemerdquo in Proceedings of theIEEE International Conference on Systems Man and Cybernetics(SMC rsquo14) pp 2077ndash2081 San Diego Calif USA 2014
[11] S D Bersch C M J Chislett D Azzi R Kusainov and JS Briggs ldquoActivity detection using frequency analysis and off-the-shelf devices fall detection from accelerometer datardquo inProceedings of the 5th International Conference on PervasiveComputing Technologies for Healthcare and Workshops (Perva-siveHealth rsquo11) pp 362ndash365 Dublin Ireland May 2011
[12] A H Khandoker D Lai R K Begg and M Palaniswami ldquoAwavelet-based approach for screening falls risk in the elderlyusing support vector machinesrdquo in Proceedings of the 4thInternational Conference on Intelligent Sensing and InformationProcessing (ICISIP rsquo06) pp 184ndash189 Bangalore India Decem-ber 2006
[13] A K Bourke J V OrsquoBrien and G M Lyons ldquoEvaluation ofa threshold-based tri-axial accelerometer fall detection algo-rithmrdquo Gait and Posture vol 26 no 2 pp 194ndash199 2007
International Journal of Telemedicine and Applications 11
[14] T Zhang JWang L Xu et al ldquofall detection by wearable sensorand one-class SVM algorithmrdquo in Intelligent Computing in Sig-nal Processing and Pattern Recognition International Conferenceon Intelligent Computing ICIC 2006 Kunming China August16ndash19 2006 vol 345 of Lecture Notes in Control and InformationSciences pp 858ndash863 Springer Berlin Germany 2006
[15] S Abbate M Avvenuti F Bonatesta G Cola P Corsini and AVecchio ldquoA smartphone-based fall detection systemrdquo Pervasiveand Mobile Computing vol 8 no 6 pp 883ndash899 2012
[16] A M Sabatini ldquoQuaternion-based strap-down integrationmethod for applications of inertial sensing to gait analysisrdquoMedical and Biological Engineering and Computing vol 43 no1 pp 94ndash101 2005
[17] J VinceQuaternions for Computer Graphics Springer LondonUK 2011
[18] J Chen K Karric D Chang et al ldquoWearable sensors for reliablefall detectionrdquo in Proceedings of the 27th Annual InternationalConference of the Engineering in Medicine and Biology Society(EMBS rsquo05) pp 3551ndash3554 Shanghai China 2005
[19] F Wu C Hu H Zhao and Y Zhao ldquoDevelopment of a fallalarm system based onmulti-sensor integrationrdquo in Proceedingsof the 25th International Technical Meeting of the SatelliteDivision of the Institute of Navigation (IONGNSS rsquo12) pp 3805ndash3813 Nashville Tenn USA September 2012
[20] C V C Bouten K T M Koekkoek M Verduin R Koddeand J D Janssen ldquoA triaxial accelerometer and portable dataprocessing unit for the assessment of daily physical activityrdquoIEEE Transactions on Biomedical Engineering vol 44 no 3 pp136ndash147 1997
[21] M Kangas I Vikman JWiklander P Lindgren L Nyberg andT Jamsa ldquoSensitivity and specificity of fall detection in peopleaged 40 years and overrdquo Gait amp Posture vol 29 no 4 pp 571ndash574 2009
[22] P Jantaraprim P Phukpattaranont C Limsakul and BWongkittisuksa ldquoEvaluation of fall detection for the elderly on avariety of subject groupsrdquo in Proceedings of the 3rd InternationalConvention on Rehabilitation Engineering amp Assistive Technol-ogy (ICREATE rsquo09) pp 1ndash4 Singapore April 2009
[23] S Abbate M Avvenuti G Cola et al ldquoRecognition of falsealarms in fall detection systemsrdquo in Consumer Communicationsand Networking Conference (CCNC rsquo11) pp 23ndash28 Las VegasNev USA 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
International Journal of Telemedicine and Applications 11
[14] T Zhang JWang L Xu et al ldquofall detection by wearable sensorand one-class SVM algorithmrdquo in Intelligent Computing in Sig-nal Processing and Pattern Recognition International Conferenceon Intelligent Computing ICIC 2006 Kunming China August16ndash19 2006 vol 345 of Lecture Notes in Control and InformationSciences pp 858ndash863 Springer Berlin Germany 2006
[15] S Abbate M Avvenuti F Bonatesta G Cola P Corsini and AVecchio ldquoA smartphone-based fall detection systemrdquo Pervasiveand Mobile Computing vol 8 no 6 pp 883ndash899 2012
[16] A M Sabatini ldquoQuaternion-based strap-down integrationmethod for applications of inertial sensing to gait analysisrdquoMedical and Biological Engineering and Computing vol 43 no1 pp 94ndash101 2005
[17] J VinceQuaternions for Computer Graphics Springer LondonUK 2011
[18] J Chen K Karric D Chang et al ldquoWearable sensors for reliablefall detectionrdquo in Proceedings of the 27th Annual InternationalConference of the Engineering in Medicine and Biology Society(EMBS rsquo05) pp 3551ndash3554 Shanghai China 2005
[19] F Wu C Hu H Zhao and Y Zhao ldquoDevelopment of a fallalarm system based onmulti-sensor integrationrdquo in Proceedingsof the 25th International Technical Meeting of the SatelliteDivision of the Institute of Navigation (IONGNSS rsquo12) pp 3805ndash3813 Nashville Tenn USA September 2012
[20] C V C Bouten K T M Koekkoek M Verduin R Koddeand J D Janssen ldquoA triaxial accelerometer and portable dataprocessing unit for the assessment of daily physical activityrdquoIEEE Transactions on Biomedical Engineering vol 44 no 3 pp136ndash147 1997
[21] M Kangas I Vikman JWiklander P Lindgren L Nyberg andT Jamsa ldquoSensitivity and specificity of fall detection in peopleaged 40 years and overrdquo Gait amp Posture vol 29 no 4 pp 571ndash574 2009
[22] P Jantaraprim P Phukpattaranont C Limsakul and BWongkittisuksa ldquoEvaluation of fall detection for the elderly on avariety of subject groupsrdquo in Proceedings of the 3rd InternationalConvention on Rehabilitation Engineering amp Assistive Technol-ogy (ICREATE rsquo09) pp 1ndash4 Singapore April 2009
[23] S Abbate M Avvenuti G Cola et al ldquoRecognition of falsealarms in fall detection systemsrdquo in Consumer Communicationsand Networking Conference (CCNC rsquo11) pp 23ndash28 Las VegasNev USA 2011
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of


















