Research Article Concurrent Driving Method with Fast Scan...
11
Research Article Concurrent Driving Method with Fast Scan Rate for Large Mutual Capacitance Touch Screens Mohamed Gamal Ahmed Mohamed and HyungWon Kim Electronic Engineering Department, School of Electrical Engineering and Computer Science, Chungbuk National University, 1, Chungdae-ro, Seowon-gu, Cheongju-si, Chungcheongbuk-do 362-763, Republic of Korea Correspondence should be addressed to HyungWon Kim; [email protected] Received 10 April 2015; Accepted 21 June 2015 Academic Editor: Chi Chiu Chan Copyright © 2015 M. G. A. Mohamed and H. Kim. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A novel touch screen control technique is introduced, which scans each frame in two steps of concurrent multichannel driving and differential sensing. e proposed technique substantially increases the scan rate and reduces the ambient noise effectively. It is also extended to a multichip architecture to support excessively large touch screens with great scan rate improvement. e proposed method has been implemented using 0.18 m CMOS TowerJazz process and tested with FPGA and AFE board connecting a 23-inch touch screen. Experimental results show a scan rate improvement of up to 23.8 times and an SNR improvement of 24.6 dB over the conventional method. 1. Introduction Touch screen panels (TSPs) are very convenient computer human interface. ey are used to detect human touch or a special pen by changing one of their physical properties. For medium- and small-size TSPs for mobile products, projected mutual capacitive-type TSPs have superior visibility and durability and also provide multitouch functions [1]. ey are also increasingly adopted for large PC monitors and TV screens [2, 3]. In mutual capacitance TSPs, touch detection is determined by measuring the change in the mutual capacitance. Figure 1 shows the conventional touch screen controller (TSC) system scanning a projected mutual capacitance TSP. It works to drive a sequence of pulses to the driving electrodes (TX) which results in a staircase signal aſter integration of the output signal coming out through the sensing electrodes (RX) [2, 4, 5]. e touch screen panel structure used in Figure 1 uses a crossline structure with large plates to magnify the value of the mutual capacitance to get better touch detection results. ere are other different electrode patterns invented to control the values of mutual capacitances, self- capacitances, and electrode resistance and so control the touch detection sensitivity and accuracy [6, 7]. Single-line driving single-line sensing (SDSS) is consid- ered the conventional scan method. It has a frame scan rate [3] given by the following formula: Scan rate (Conv.Sch.) = 1 drive × integration × TX × RX . (1) Here, TX is the number of TX lines, RX is the number of RX lines, and drive is a period of one TX pulse. integration is the number of integration steps (or the number of TX pulses per sensing point). As indicated by (1), conventional TSC systems sequentially drive each TX line and sequentially sense each RX line, resulting in an unacceptable low frame scan rate for large touch screen panels. Different research efforts have been done to improve the frame scan rate and signal to noise ratio as they are the most important issues in controller design [8–10]. Mutual capacitance touch screen panels are susceptible to noise, so much of research has been focused on how to reduce the noise and increase the touch signal strength [11, 12] by single-line driving differential sensing (SDDS). While there are soſtware algorithm approaches [13–15], many papers proposed circuit- level approaches to address the noise reduction problem [16, 17]. Frame scan rate has been solved for small- and Hindawi Publishing Corporation Journal of Sensors Volume 2015, Article ID 768293, 10 pages http://dx.doi.org/10.1155/2015/768293
Transcript of Research Article Concurrent Driving Method with Fast Scan...

Research ArticleConcurrent Driving Method with Fast Scan Rate forLarge Mutual Capacitance Touch Screens
Mohamed Gamal Ahmed Mohamed and HyungWon Kim
Electronic Engineering Department, School of Electrical Engineering and Computer Science,Chungbuk National University, 1, Chungdae-ro, Seowon-gu, Cheongju-si, Chungcheongbuk-do 362-763, Republic of Korea
Correspondence should be addressed to HyungWon Kim; [email protected]
Received 10 April 2015; Accepted 21 June 2015
Academic Editor: Chi Chiu Chan
Copyright © 2015 M. G. A. Mohamed and H. Kim. This is an open access article distributed under the Creative CommonsAttribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work isproperly cited.
A novel touch screen control technique is introduced, which scans each frame in two steps of concurrent multichannel driving anddifferential sensing.The proposed technique substantially increases the scan rate and reduces the ambient noise effectively. It is alsoextended to a multichip architecture to support excessively large touch screens with great scan rate improvement. The proposedmethod has been implemented using 0.18 𝜇mCMOSTowerJazz process and tested with FPGA andAFE board connecting a 23-inchtouch screen. Experimental results show a scan rate improvement of up to 23.8 times and an SNR improvement of 24.6 dB over theconventional method.
1. Introduction
Touch screen panels (TSPs) are very convenient computerhuman interface. They are used to detect human touch or aspecial pen by changing one of their physical properties. Formedium- and small-size TSPs for mobile products, projectedmutual capacitive-type TSPs have superior visibility anddurability and also provide multitouch functions [1]. Theyare also increasingly adopted for large PC monitors and TVscreens [2, 3]. In mutual capacitance TSPs, touch detectionis determined by measuring the change in the mutualcapacitance.
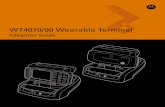
Figure 1 shows the conventional touch screen controller(TSC) system scanning a projected mutual capacitance TSP.It works to drive a sequence of pulses to the driving electrodes(TX) which results in a staircase signal after integration ofthe output signal coming out through the sensing electrodes(RX) [2, 4, 5]. The touch screen panel structure used inFigure 1 uses a crossline structure with large plates tomagnifythe value of the mutual capacitance to get better touchdetection results. There are other different electrode patternsinvented to control the values of mutual capacitances, self-capacitances, and electrode resistance and so control thetouch detection sensitivity and accuracy [6, 7].
Single-line driving single-line sensing (SDSS) is consid-ered the conventional scan method. It has a frame scan rate[3] given by the following formula:
Scan rate(Conv.Sch.) =1
𝑇drive × 𝑁integration × 𝑁TX × 𝑁RX. (1)
Here,𝑁TX is the number of TX lines,𝑁RX is the numberof RX lines, and 𝑇drive is a period of one TX pulse.𝑁integrationis the number of integration steps (or the number of TXpulses per sensing point). As indicated by (1), conventionalTSC systems sequentially drive each TX line and sequentiallysense each RX line, resulting in an unacceptable low framescan rate for large touch screen panels.
Different research efforts have been done to improvethe frame scan rate and signal to noise ratio as they are themost important issues in controller design [8–10]. Mutualcapacitance touch screen panels are susceptible to noise, somuch of research has been focused onhow to reduce the noiseand increase the touch signal strength [11, 12] by single-linedriving differential sensing (SDDS). While there are softwarealgorithm approaches [13–15], many papers proposed circuit-level approaches to address the noise reduction problem[16, 17]. Frame scan rate has been solved for small- and
Hindawi Publishing CorporationJournal of SensorsVolume 2015, Article ID 768293, 10 pageshttp://dx.doi.org/10.1155/2015/768293

2 Journal of Sensors
ADC
TX sw
itche
s
RX switches
Integrator
Input and output of the system
Measured by ADC
Mutual cap.Self-cap.
Figure 1: Conventional touch screen controller system.
medium-size screens by different driving methods [12].However it is still not efficient for large-size TSPs.
In this paper, we propose a new TSC architecture. Thisarchitecture can be used in multichip architecture to sharescanning of a large TSP [18]. As the size of TSPs grows, ingeneral, the number of driving (TX) lines and sensing (RX)lines tends to increase to keep their high resolution of touchdetection. It becomes therefore difficult to control a large TSPbecause frame scan rate is much lower than required. Ourtouch screen controller used the proposed concurrent drivingtechnique with differential sensing in order to improve framescan rate and eliminate noise effects.
2. Concurrent Driving Method
Large touch screen panels usually require a large number ofdriving (TX) and sensing (RX) lines in order to satisfy theirtouch detection resolution requirements. This imposes highburden on TSC design. The time required to scan one framegrows along with the number of TX and RX lines in mosttouch screen control methods based on (1). However mostTSC systems have a target frame scan rate that they mustsatisfy to ensure touch detection quality which is usually inthe range of 100Hz∼200Hz [8, 9].
Our TSC provides an effective solution with a very highscan rate for large touch screen panels. It consists of threecomponents driving a specified number of TX lines, sensinga specified number of RX lines, and running detectionalgorithm software on the sensed data and then it sendstouch position data to the next chip in multichip architecturevia serial link. A novel driving and scanning technique isintroduced, which reduces the frame scan time and ambientnoise effects. The controller can be used for touch screenpanels of different sizes, fabricated with variousmaterials andvarious patterns.
Our touch screen scanning method consists of two stepsto scan one frame of touch screen panel. In the first step(concurrent driving differential sensing (CDDS)), all TX lines(rows) are concurrently driven by opposite polarity pulses,
which is described by Figure 2(a). This step determines thetouched RX lines by differentially sensing the output of eachtwo adjacent RX lines. The idea behind this technique isto cancel the common mode signal while leaving only thedifferential signal by applying opposite excitation pulses toevery adjacent cell in the same RX line. Since the majorportion of ambient noise often appears as common modesignals in the adjacent RX lines, such noise can be canceledeffectively by differential sensing leading to an increasedsignal to noise ratio (SNR).This step results in zero output incase of no touchwhile giving nonzero output if any cell on thetwo RX lines is touched. The second step (single-line drivingdifferential sensing (SDDS)) is to sequentially scan each pairof two adjacent cells in only the touched RX lines as shown inFigure 2(b).
The differential integrator input integrates the differencebetween two adjacent lines. Through concurrent driving,each TX signal propagates through one TX line and twoRX lines connected by two mutual capacitances as shown inFigure 3. Hence the differential RX output, in case of single-line driving, can be expressed by
𝑉RX𝑚
−𝑉RX𝑚+1
= (𝐹TX (𝑆) 𝐹𝐶𝑀1
(𝑆) 𝐹RX (𝑆)
− 𝐹TX (𝑆) 𝐹RC (𝑆) 𝐹𝐶𝑀2
(𝑆) 𝐹RX (𝑆))Vin = 𝐹TX (𝑆)
⋅ 𝐹RX (𝑆) (𝐹𝐶𝑀1
(𝑆) − 𝐹RC (𝑆) 𝐹𝐶𝑀2
(𝑆))Vin.
(2)
Here 𝐹TX(𝑆) and 𝐹RX(𝑆) are the transfer functions (TFs)for TX line and RX line, respectively. 𝐹𝐶
𝑀1
(𝑆) and 𝐹𝐶𝑀2
(𝑆) areTFs for the mutual capacitance of the first and the secondcells, respectively. 𝐹RC(𝑆) is TF for the RC circuit connectingthe first and the second cells. Considering that the resistanceand self-capacitance connecting two adjacent cells are verysmall, we can ignore their transfer function. Therefore thedifferential output of two RX lines equals
𝑉RX𝑚
−𝑉RX𝑚+1
= (𝐹𝐶𝑀1(𝑆) − 𝐹𝐶
𝑀2(𝑆)) 𝐹TX (𝑆) 𝐹RX (𝑆)Vin.
(3)

Journal of Sensors 3
Switch ADC
Step 1 (CDDS) Touch screen
panel
Sensing circuit
(a) (b)
.
Integrator
Switch ADC
TX
Step 2 (SDDS) Touch screen
panel
Sensing circuit
0 1
3 2
4 5
7 6
8 9
11 10
0 1Output signal
RXx RXx+1 IntegratorRXx RXx+1
TX0
TX1
TX2
TX3
TXn−1
TXn
...
∫∫
Figure 2: Proposed concurrent driving method with differential sensing. (a) Step 1: concurrent driving with differential sensing. (b) Step 2:single-line driving with differential sensing. The output of integrator is positive if one of the even cells marked in purple color is touched,negative if one of the odd cells marked in green color is touched, and zero if there is no touch.
TX
Cs Cs
Cs Cs
Cs Cs
Cs Cs
CsCs
rTX rTX rTX rTX
rRX rRX
rRX
rRX rRX
rRX
FTX(S)
FRX(S) FRX(S)
FRC(S)
CM1
CM2
Cs: Self-cap.CM1, CM2: mutual cap.rTX: TX cell resistancerRX: RX cell resistanceFTX(S): TF for TX lineFRX(S): TF for RX lineFRC(S): TF for RC circuit connecting two cells
RXm RXm+1
......
· · ·
Figure 3: Schematic for one TX line connected with two RX lines in mutual capacitance touch screen showing the signal propagation pathfor differential sensing.
In case of no touch, the output is zero since the twomutualcapacitances are equal and so are their transfer functions. Onthe contrarywhen there is a touch point affecting the two cellsin different amount, the output is not zero. The output haspositive or negative value based on which cell is touched andthe polarity of the input signal as shown in Figure 2.
Applying the superposition theorem on the system ofconcurrent differential driving case, the system output is
the summation of the effect of all supplies which resultsin zero output in case of no touch, positive in case oftouch affecting the even ordered cells (marked in purple inFigure 2), and negative in case of touch affecting the oddordered cells (marked in green in Figure 2).
The timing diagram of Figure 4 illustrates the two steps.The first step (CDDS) drives all TX lines concurrently withopposite polarity pulses and sequentially reads out every pair

4 Journal of Sensors
All TX lines
Driv
ing
Sens
ing
Step 1 (CDDS) Step 2 (SDDS)
TimeConcurrent driving withsequential sensing
Sequential driving with sequential sensing for selected RX lines
RXm & RXm+1 RXn & RXn+1· · ·
· · · · · ·· · ·
· · ·
RX0
& R
X 1RX
1&
RX 2
RX2
& R
X 3RX
3&
RX 4
RX4
& R
X 5RX
5&
RX 6
RX6
& R
X 7
RX74
& R
X 75
RX75
& R
X 76
RX76
& R
X 77
TX0
TX1
TX2
TX3
TX41
TX42
TX43
TX4
TX0
TX1
TX2
TX3
TX41
TX42
TX43
TX4
Figure 4: Timing flow diagram for concurrent driving method. (𝑚,𝑚 + 1) and (𝑛, 𝑛 + 1) are indexes for touched RX pairs.
of two RX lines. During this step, each pair of RX lines ismarked as touched or untouched. Once all the touched pairsare determined, the second step (SDDS) starts by selecting thefirst touched pair of RX lines and sequentially drives the TXlines starting with the first TX line. Each cell on the selectedRX line is marked based on the differential integrator output.A positive integrator output indicates that the first cell ofthe RX pair is touched, while a negative integrator outputindicates that the second cell is touched. The above processis repeated for all TX lines to scan all touched RX lines. Onceall the touched RX lines are scanned, all touched cells (touchpositions) can be determined.
Our method eliminates the needs for scanning all cellsevery frame which is the major drawback of conventionalmethods, and so it can improve the frame scan rate. Foran example touch screen of 𝑁TX × 𝑁RX = 44 × 78 lines,a conventional sensing method requires 3432 × Δ𝑡 secondswhere Δ𝑡 is the time for scanning one cell. The proposedmethod, on the other hand, needs only 78 × Δ𝑡 + 𝑛 × 44 ×Δ𝑡 seconds, where 𝑛 is the number of RX pairs that aredetermined as touched pairs. Here, the first term (78 × Δ𝑡) isthe time consumed by the concurrent scan step which scanseach of the RX lines and finds touched lines.The second term(𝑛 × 44 × Δ𝑡) is the time consumed by the selective scan stepwhich scans only the touched RX lines.
Next, consider an example where five fingers are touchingdifferent RX lines. Assuming that one touch point affectsthree RX lines on average [5], the number of affected RX linesis 15 and the number of RX pairs is 10. Then the proposedmethod has a total scanning time of 78 × Δ𝑡 + 10 × 44 × Δ𝑡 =518×Δ𝑡.This is an improvement of 6.63 times comparedwiththe conventional method. However in case of no touch eventfor long time, our scanning method keeps repeating the firststep until touch event occurs, so that our TSC keeps scanningthe touch screen panel every 𝑇drive×𝑁integration×𝑁RX secondswhich equals 0.5 milliseconds for 1.25MHz excitation signaland eight integration steps. Therefore it increases the touchscreen response because the first step takes very short time tofinish.
For our proposed method, a generalized form of theframe scan rate is given by
Scan rate(Prop.Sch.)
=1
𝑇drive × 𝑁integration × (𝑁RX + 𝑛 × 𝑁TX).
(4)
Our proposed method employs a differential sensingcircuit to cancel ambient noise, which is the major cause ofpoor touch detection performance in most cases.
It can substantially speed up the overall sensing processallowing a very fast frame scan rate. It, therefore, is well suitedfor large touch screens.
3. Multichip Architecture
To support large touch screen panels, we may use one of thetwo conventional methods. The first is fabrication of anotherTSC that has a larger number of TX and RX lines. This,however, is time consuming and costly and cannot achieve ahigh frame scan rate. The second is to use multichip archi-tecture with each chip employing a conventional scanningtechnique. For the first method, the scan time is proportionalto the square of the screen size.The secondmethod can allowsequential TX driving and simultaneous RX sensing.Thus itsscan time linearly increases in proportion to the number ofTX and RX lines.
In this section, we propose a novel scanning methodwhich can efficiently reduce the overall scan time inmultichiparchitecture. Figure 5 shows a TSC designed for this multi-chip architecture. This TSC conducts three main functions:drive a set of TX lines, sense a set of RX lines, and rundetection algorithm. The chip consists of two main blocks:CPU andTX/RX controller.TheCPU is connectedwith otherfunctional blocks through an internal system bus called AHBbus.The CPU and TX/RX controller communicate through aset of control registers. While the TX/RX controller controlsthe TX and RX switches, the CPU reads sensing data from

Journal of Sensors 5
AHB Bus
CPU
Dat
a mem
ory
MEMcon
RX memory 0
MEMcon
RX memory 1
MEMcon
Exte
rnal
mem
ory
cont
rolle
r
(ex
CPU
in
terfa
ce)
UART
DeM
UX
Control registers
TX memory
MEMcon
SPI b
lock
(dat
a exc
hang
e be
twee
n ot
her c
hips
)
AD
C
Sens
ing
circ
uit
RX sw
itche
s
TX d
river
TX sw
itche
s
TX/RX controller
Rese
t
TXRX
TX li
nes
RX li
nes
MO
SIExternal flash
data and address
External SRAMdata and address
External/internal CPU select
MUXD
ACSt
art
Don
e
MIS
O
MO
SI_C
LKM
ISO
_CLK
MO
SI
MIS
O
MO
SI_C
LKM
ISO
_CLK
Figure 5: Touch screen controller architecture.
TSP
Chip 0
Chip 1
Chip 2
Start Done
Synchronization mechanism
SPI
SPI
Figure 6: The proposed touch screen controller (TSC) in multichip architecture scanning large touch screen panel.
its RX memories and runs an algorithm for touch positioncalculation. Table 1 summarizes the function of major blocksin the proposed TSC chip of Figure 5.
Even for extremely large touch screens, only a smallnumber of TSCs are needed as shown in Figure 6.Thenumberof TSCs (𝑁TSC) needed for a given touch screen size is givenby
𝑁TSC2= ceil( touch screen size
supported size by one TSC) , (5)
where ceil (𝑥) is a function that rounds 𝑥 up to the nextinteger.
Our chip supports a commercial 23-inch touch screenof projected mutual capacitance type, which has TX × RXelectrode lines of 44 × 78 channels. The proposed multi-TSCscanning technique can support larger touch screens by usingmultiple chips. Let𝑁TSC be the number of TSCs.We partitionthe TX and RX lines of a touch screen into 𝑁TSC segmentsof TX and𝑁TSC segments of RX lines, respectively. Then the𝑁TSC TSCs cooperate in 2 steps as given in Figure 6.

6 Journal of Sensors
Table 1: Proposed touch screen controller block function.
Block Functions
CPU
(i) Run algorithm which is installed on the external flash memory or data memory(ii) Feed control parameters to control registers block(iii) Start TX/RX controller(iv) Fill TX memory with TX signal sample values(v) Read RX signal sample values from RX memory(vi) Control UART and SPI blocks for data exchange with other chips or a host system
Host system interface(i) Write the internal memories or control registers(ii) Test and debug other blocks(iii) Use the touch positions for host system applications
AHB bus Connect CPU to other functional blocks
External memory controller Connect external flash memory to work as program memory and SRAMmemory to work as datamemory
Data memory Used as internal data memory. It can also be used as a program memory and data memory at thesame time
RX memory(2 modules)
(i) Two-port memory operating as a FIFO with one port connected to the AHB bus and the other toan ADC(ii) Store TX output values sampled from the ADC, which is to be analyzed by the CPU(iii) If one of the two memory blocks is storing RX samples, CPU is reading the other one. Once thememory is filled up, the two memories swap their roles
TX memory
(i) Two-port memory operating as a FIFO with one port connected to the AHB bus and the other tosignal generator to feed signal values to DAC(ii) CPU precalculates and stores signal samples into this memory block before initiating the TX/RXcontroller
Control registers Register storing control parameters for TX/RX controllerADC Convert the analog RX signals sampled from sensing circuitDAC Convert digital TX values stored in DAC memory to analog values to be applied to TSP
TX/RX controller Control all TX and RX switches, ADC, DAC, and TX driver. It sends synchronous control signals toall blocks based on the value of control registers
TX driver Amplify the signal coming out from DAC to be applied to TSP. It also can set different gains using acontrol signal coming from TX/RX controller
Sensing circuit Amplify the output signal coming from TSP and cancel the noiseSet of TX switches Used to select active TX line/lines to apply TX signalsSet of RX switches Used to select a RX pair to read out RX signal
Each TSC generates its TX signals in parallel and receivesRX signals directly to/from TSP, and it also calculates thetouch positions individually. For example, supposewe controla very large touch screen (132 × 234 lines), nine times largerin size than the touch screen size supported by one TSCintroduced in Section 2. The proposed architecture usesthree TSCs (TSC0∼TSC2) as illustrated by Figure 7. Step 1(CDDS): each of the 𝑁TSC TSCs drives its segment of TXlines concurrently, while each of the 𝑁TSC TSCs determineswhich RX lines are touched (stored in 𝐿RX); Step 2 (SDDS):each of the 𝑁TSC TSCs drives entire TX lines sequentiallyfor only the RX lines that have been selected as touchedlines in Step 1. The reading operation for RX lines is alwaysconducted sequentially. In Step 1, the reading is done once perevery RX pair. On the other hand, in Step 2, the reading isrepeated as many times as the number of TX lines per eachRX pair that was selected in Step 1.
Our proposed architecture, therefore, can further reducethe latency of detection. It also can reduce power consump-tion and SoC design costs. The following equation gives
the frame scan rate of themultichip architecture for large TSPsupported:
Scan rate(Prop.Sch.+MultiChip)
=1
𝑇drive × 𝑁integration × (𝑁RX(chip) + 𝑛TSC × 𝑁TX).
(6)
Here 𝑛TSC is the number of RX pairs determined astouched pairs by every TSC, 𝑁RX(chip) is the number of RXlines supported by one chip, and 𝑁TX is the total number ofTX lines.
4. Experimental Results
4.1. System Implementation. Our proposed method has beenimplemented with FPGA board connected with analog frontend (AFE) board. The AFE board has our chip fabricatedin 0.18 𝜇m CMOS TowerJazz process. Figure 8 shows oursystem implementation and our chip layout. Fabricated chiphas all analog switches, sensing circuits, and digital logic for

Journal of Sensors 7
Step 1 (CDDS):All TSCs drive all TX lines in their segment concurrently
Step 2 (SDDS):
End
LTX,RX gives a list of all touched points (TX, RX)
Put cell index in the list LTX,RX of touches, if the TX line is touchedTSCi drives each TX line sequentiallyRepeat for all TSCi, i = 1 to K
Repeat for each RX pair of LRX
Every TSC determines a list LRX of RX pairs that are touched
(a)
Driv
ing
Sens
ing
Step 1 (CDDS)
Step 2 (SDDS): scan of one RX pairThis step is repeated to scan all touched RX pairs
TimeConcurrent driving with
sequential sensingSequential driving with sequential sensing
for selected RX lines
RXa & RXa+1
RXb & RXb+1
RXc & RXc+1
· · ·
· · ·
· · ·
· · ·
· · ·
· · ·
RX156
& R
X 157
RX157
& R
X 158
RX158
& R
X 159
RX159
& R
X 160
RX160
& R
X 161
RX161
& R
X 162
RX162
& R
X 163
RX230
& R
X 231
RX231
& R
X 232
RX232
& R
X 233
RX152
& R
X 153
RX153
& R
X 154
RX154
& R
X 155
RX78
& R
X 79
RX79
& R
X 80
RX80
& R
X 81
RX81
& R
X 82
RX82
& R
X 83
RX83
& R
X 84
RX84
& R
X 85
RX74
& R
X75
RX75
& R
X76
RX76
& R
X77
RX0
& R
X 1RX
1&
RX 2
RX2
& R
X 3RX
3&
RX 4
RX4
& R
X 5RX
5&
RX 6
RX6
& R
X 7
TX0
TX1
TX2
TX3
TX4
TX41
TX42
TX43
TX44
TX45
TX46
TX47
TX48
TX88
TX89
TX90
TX91
TX92
TX129
TX130
TX131
TX85
TX86
TX87
All TX lines (TX0–TX43)
All TX lines (TX44–TX87)
All TX lines (TX88–TX131)
(b)
Figure 7: Operation of concurrent driving method in multichip architecture. (a) Pseudocode. (b) Timing flow diagram.
controlling switches. However FPGA board has ADC, DAC,and all control andprocessing logic. In this system, embeddedCPU on FPGA is used to run touch detection algorithm andextract touch points in order to send them to PC throughUART cable.
4.2. Scan Rate Improvement. As described in the previoussection, our scanning technique (CDDS + SDDS) uses twosteps to scan one frame. Conventional touch screen detectionmethods (SDSS or SDDS) need a total scan time of 𝑁TX ×𝑁RX × Δ𝑡 seconds to scan one frame. Here Δ𝑡 representsthe time required to scan one cell. Δ𝑡 is determined bythe frequency of driving signal and the number of chargeintegrations required to meet the target performance. On theother hand, for our proposed technique, it takes 𝑁RX(chip) ×Δ𝑡 seconds to finish the first step and 𝑛TSC×𝑁TX×Δ𝑡 secondsto finish the second step. Therefore, the scan complexity
of our proposed method is 𝑂(2𝑁) when a single touchis considered, while it slightly increases for multitouch. Incontrast, the scan complexity of conventional methods is𝑂(𝑁2) regardless of the number of touches.
For the multichip TSC architecture, the required scantime does not increase with the number of TSCs employed,since all TSCs operate in parallel. In particular, the parallelprocessing keeps the time taken by the first step always thesame, nomatter howmanyTSCs are used. On the other hand,the required time to finish the second step of our multichipscheme is given by 𝑛TSC × 𝑁TX × Δ𝑡. For example, considera multichip scheme with 3 TSCs. If the number of touchedRX pairs for each TSC is (3, 5, 1), then 𝑛TSC is 5, which isthe largest number of RX pairs of all TSCs. Thus for theabove example TSP of 132 × 234 lines, our method gives ascan time of 78 × 1 us + 5 × 132 × 1 us = 738 us (assumingΔ𝑡 = 1 us). In contrast, the conventional method requires

8 Journal of Sensors
Driv
eam
plifi
er
TX sw
itche
s
RX switches
Decoders RX sw
itche
s
Sens
ing
circ
uit
UARTTSPAFEFPGAPC
Figure 8: TSC system implementation using FPGA board and AFE board connected with a commercial 23-inch touch screen panel. Touchpoints are transferred to PC using UART connection in order to display them using graphical user interface software. The chip used in AFEboard for testing is fabricated on 0.18 𝜇m CMOS TowerJazz process. It has all analog switches, sensing circuits, and digital logic for switchescontrol. However FPGA board has ADC, DAC, and all control and processing logic.
123 × 234 × 1 us = 30888 us.This example thus shows that ourmultichip architecture can substantially improve the framescan rate compared to conventional schemes.
Figure 9 compares the frame scan time for 3 differentschemes simulated with touch screens of various sizes: (1)the proposed multichip architecture with concurrent scan,(2) multichip architecture with a conventional scan, and (3)conventional single TSC. In this comparison, the numbers ofTX and RX lines of each touch screen size are scaled in a waythat makes the pitch between the lines the same as the pitchof the 23-inch touch screen (a commercial touch screen usedfor experiment). This comparison is done with the followingparameters: 1.25MHz excitation TX pulses and 8 TX pulsesfor each charge integration. We also assume that every TSChas disjoint five touch points which leads to ten pairs of RXlines.
As shown in Figure 8, the frame scan rate for ourtechnique is 22 times higher than the conventional schemefor the 70-inch touch screen and 14.3 times higher for the 46-inch touch screen.
4.3. Noise Cancellation. We have conducted experiments fora single TSC case with a 23-inch commercial touch screenwith the system shown in Figure 8. We implemented thedigital controller in an FPGA and the differential driving andsensing circuit in an AFE board.The differential integrator ofthe sensing circuit has been implemented in cascaded stagesof subtraction and integration circuits.
Figure 10 compares experimental results of our TSCwith differential sensing and the results of the single-linesensing method. For both cases, the output of the integratoris measured using concurrent TX driving with differentialTX pulses for a 23-inch TSP. In Figures 10(a) and 10(b), thesignal in blue color represents the difference between twoRX lines in case of differential sensing. In Figures 10(c) and10(d), the blue signal is the RX line signal for the single-line
446.
43
413.
36
348.
77
301.
64
223.
85
163.
10
111.
77
104.
17
84.1
9
60.4
7
45.5
3
32.3
1
22.7
6
15.1
8104.
17
84.1
9
60.4
7
45.5
3
22.9
1
11.3
8
5.06
050
100150200250300350400450500
15 17 20 23 32 46 70
Fram
e sca
n ra
te (H
z)
Touch screen size (in)
Multichip architecture with proposed scan methodMultichip architecture with conventional scan methodConventional method
2 TSCs1 TSC
1 TSC1 TSC
1 TSC
2 TSCs3 TSCs
Figure 9: Frame scan rate used with different scanning techniquesfor different touch screen sizes.
sensing method. The signal in green color represents one TXline input, and signals in sky blue and purple represent theintegrator output.
The proposed CDDS scheme can cancel common modesignals, which can in effect remove most of ambient noise asshown in Figures 10(a) and 10(b). As described in Section 2,the integrator output of the proposed scheme becomes zeroin case of no touch (Figure 10(a)) and nonzero in case oftouch applied (Figure 10(b)). On the other hand, concurrentdriving with single-line sensing (CDSS) scheme results innonzero output in both untouched (Figure 10(c)) and touchedcase (Figure 10(d)). In this scheme, the integrator outputgives larger values for touched case. Nonzero output of theuntouched case is due to the accumulation of the signal dif-ference between every two adjacent cells in the same RX line.
Therefore, the proposed CDDS method enables efficientnoise reduction by cancelling ambient noise. This effect can

Journal of Sensors 9
Integrator output
TX input signal
Subtraction of two adjacent RX lines
(a)
Integrator output
Subtraction of two adjacent RX lines
TX input signal
(b)
Integrator output
RX output signal
TX input signal
(c)
Integrator output
RX output signal
TX input signal
(d)
Figure 10: Measurement results of a 23-inch touch screen panel with concurrent differential driving. (a) With differential sensing in case ofno touch. (b) With differential sensing in case of touch applied. (c) With single-line sensing in case of no touch. (d) With single-line sensingin case of touch applied.
20
30
40
50
60
70
2 4 6 8
SNR
(dB)
Number of integrations
CDDSCDSS
SDDSSDSS
(a)
0
1000
2000
3000
4000
5000
2 4 6 8
Scan
rate
(Hz)
Number of integrations
Proposed (1 touch)Proposed (5 touches)
Conventional
(b)
Figure 11: Experimental results for a 23-inch touch screen panel. (a) SNR of four different driving and sensing schemes. (b) Scan rate of theproposed method CDDS compared with conventional method SDSS. This experiment was conducted with 1.25MHz TX pulse signal with10V swing. Note: SNR is calculated using the equations in [19].
be observed by inspecting that the peak-to-peak noise valuesin Figure 10(a) are much lower than that of Figure 10(c).Such lower noise values allow smaller deviation of the signalsamples at the ADC from their average values and so leadto more accurate decision of touch detection. Therefore, theCDDS scheme gives a higher SNR, and then it can eliminate
the need for additional noise filters. Figure 11(a) compares theSNR gain of four different driving and sensing schemes. First,we compare the two schemes of concurrent driving. Whilethe SDDS scheme gives 69.13 dB, the proposed schemeCDDSprovides an SNR of 67.82 dB showing negligible SNR degra-dation.Thenwe compare the 2 schemes of single-line driving.

10 Journal of Sensors
While the SDSS scheme gives 43.2 dB, the CDSS schemegives 40.11 dB.These results show that the concurrent drivinghas little degradation in SNR compared to the single-linedriving scheme.The differential sensing, however, provides alarge SNR improvement, 27 dB, over the single-line sensing.Figure 11(b) shows that the proposed scheme CDDS provides6.63 times higher scan rate than the conventional schemeSDSS for 5-finger touch case and 23.83 times higher for one-finger touch case.These experimental results, therefore, provethat the concurrent driving with differential sensing schemeprovides substantial improvement in frame scan rate at littlesacrifice in SNR.
5. Conclusions
We have presented a new architecture for touch screencontroller which can be extended to a multichip structurefor parallel processing. We have also developed a concurrentdriving and high SNR sensing method for projected mutualcapacitance touch screens. A two-step algorithm is proposedto reduce the time required for scanning large touch screens.With the concurrent driving and multichip architecture, ourmethod can provide substantially faster frame scan rate thanconventional methods, a crucial requirement for large touchscreen panels (TSPs). Experimental results show that our pro-posed method can improve the frame scan rate by 6.6 timesfor a 5-finger touch and 23.8 times for a single-finger touch fora 23-inch TSP compared to a conventional method.They alsoshow that its touch detection SNR gain is 67.82 dB, a 24.6 dBimprovement compared with the conventional scheme.
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper.
Acknowledgment
This work was supported by the Center for Integrated SmartSensors funded by the Ministry of Science, ICT & FuturePlanning as Global Frontier Project (CISS-2014011066).
References
[1] G. Barrett and R. Omote, “Projected-capacitive touch technol-ogy,” Information Display, vol. 26, no. 3, pp. 16–21, 2010.
[2] M. G. Mohamed, T.-W. Cho, and H. Kim, “Efficient multi-touch detection algorithm for large touch screen panels,” IEIETransactions on Smart Processing and Computing, vol. 3, no. 4,pp. 246–250, 2014.
[3] I. Seo, T.-W. Cho, H. Kim, H. G. Jang, and S. Lee, “Frequencydomain concurrent sensing technique for large touch screenpanels,” in Proceedings of the IEEK Fall Conference, Seoul,Republic of Korea, November 2013.
[4] J.-S. Lee, D.-H. Yeo, J.-Y. Um et al., “37.3: a 10-touch capacitive-touch sensor circuit with the time-domain input-node isola-tion,” SID Symposium Digest of Technical Papers, vol. 43, no. 1,pp. 493–496, 2012.
[5] I. Seo, U. Jang, M. Mohamed et al., “Voltage shifting doubleintegration circuit for high sensing resolution of large capacitivetouch screen panels,” in Proceedings of the 18th IEEE Inter-national Symposium on Consumer Electronics (ISCE ’14), Jeju,Republic of Korea, 2014.
[6] J. Lee, M. T. Cole, J. C. S. Lai, and A. Nathan, “An analysis ofelectrode patterns in capacitive touch screen panels,” Journal ofDisplay Technology, vol. 10, no. 5, pp. 362–366, 2014.
[7] H. Akhtar and R. Kakarala, “A methodology for evaluatingaccuracy of capacitive touch sensing grid patterns,” Journal ofDisplay Technology, vol. 10, no. 8, pp. 672–682, 2014.
[8] A. Ng, J. Lepinski, D. Wigdor, S. Sanders, and P. Dietz,“Designing for low-latency direct-touch input,” in Proceedingsof the 25th Annual ACM Symposium on User Interface Softwareand Technology (UIST ’12), pp. 453–464, Cambridge, Mass,USA, October 2012.
[9] A. Ng and P. H. Dietz, “The need for speed in touch systems,”SID SymposiumDigest of Technical Papers, vol. 44, no. 1, pp. 547–550, 2013.
[10] J. H. Yang, S. H. Park, J. Y. Jeon et al., “A high-SNR area-efficientreadout circuit using a delta-integration method for capacitivetouch screen panels,” SID SymposiumDigest of Technical Papers,vol. 43, no. 1, pp. 1570–1573, 2012.
[11] I.-S. Yang andO.-K. Kwon, “A touch controller using differentialsensing method for on-cell capacitive touch screen panelsystems,” IEEETransactions onConsumer Electronics, vol. 57, no.3, pp. 1027–1032, 2011.
[12] H. Ma, S. Heo, J. J. Kim, and F. Bien, “Algorithm for improvingsnr using high voltage and differential manchester code forcapacitive touch screen panel,” Electronics Letters, vol. 50, no.24, pp. 1813–1815, 2014.
[13] M. G. A. Mohamed, U. Jang, I. Seo et al., “Efficient algorithmfor accurate touch detection of large touch screen panels,”in Proceedings of the 18th IEEE International Symposium onConsumer Electronics (ISCE ’14), Jeju, Republic of Korea, June2014.
[14] K. Lim, K.-S. Jung, C.-S. Jang, J.-S. Baek, and I.-B. Kang, “A fastand energy efficient single-chip touch controller for tablet touchapplications,” IEEE/OSA Journal of Display Technology, vol. 9,no. 7, pp. 520–526, 2013.
[15] Y. Kim and A. H. Tewfik, “Low power detection on capacitivetouch screens,” in Proceedings of the 1st IEEE Global Conferenceon Signal and Information Processing (GlobalSIP ’13), pp. 638–641, December 2013.
[16] H. Shin, S. Ko, H. Jang, I. Yun, and K. Lee, “A 55 dB SNRwith 240Hz frame scan rate mutual capacitor 30 × 24 touch-screen panel read-out IC using code-division multiple sensingtechnique,” in Proceedings of the 60th IEEE International Solid-State Circuits Conference (ISSCC ’13), pp. 388–389, February2013.
[17] I. Seo and H. Kim, “Dual sensing with voltage shifting schemefor high sensitivity touch screen detection,” Journal of theInstitute of Electronics and Information Engineers, vol. 52, no. 4,pp. 71–79, 2015.
[18] G. Choi, M. G. A. Mohamed, and H. Kim, “Distributedarchitecture of touch screen controller SoC for large touchscreen panels,” in Proceedings of the International SoC DesignConference (ISOCC ’14), pp. 22–23, IEEE, Jeju, Republic ofKorea, November 2014.
[19] ATMEL, Buttons, Sliders and Wheels: Sensor Design Guide,ATMEL, 2011.

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Journal ofEngineeringVolume 2014
Submit your manuscripts athttp://www.hindawi.com
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Modelling & Simulation in EngineeringHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
DistributedSensor Networks
International Journal of