
Research Article An Augmented Discrete-Time...
14
Research Article An Augmented Discrete-Time Approach for Human-Robot Collaboration Peidong Liang, Lianzheng Ge, Yihuan Liu, Lijun Zhao, Ruifeng Li, and Ke Wang State Key Lab of Robotics Systems, Harbin Institute of Technology, Harbin 150001, China Correspondence should be addressed to Lijun Zhao; [email protected] Received 10 December 2015; Accepted 4 February 2016 Academic Editor: Paolo Renna Copyright © 2016 Peidong Liang et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Human-robot collaboration (HRC) is a key feature to distinguish the new generation of robots from conventional robots. Relevant HRC topics have been extensively investigated recently in academic institutes and companies to improve human and robot interactive performance. Generally, human motor control regulates human motion adaptively to the external environment with safety, compliance, stability, and efficiency. Inspired by this, we propose an augmented approach to make a robot understand human motion behaviors based on human kinematics and human postural impedance adaptation. Human kinematics is identified by geometry kinematics approach to map human arm configuration as well as stiffness index controlled by hand gesture to anthropomorphic arm. While human arm postural stiffness is estimated and calibrated within robot empirical stability region, human motion is captured by employing a geometry vector approach based on Kinect. A biomimetic controller in discrete-time is employed to make Baxter robot arm imitate human arm behaviors based on Baxter robot dynamics. An object moving task is implemented to validate the performance of proposed methods based on Baxter robot simulator. Results show that the proposed approach to HRC is intuitive, stable, efficient, and compliant, which may have various applications in human-robot collaboration scenarios. 1. Introduction HRC represents most key characters of next generation of robots working without cages and sharing the same work- space with human community [1, 2]. It allows human to interact with robots physically with safety and compliance guaranteed. erefore, HRC has a variety of applications in home care [3], office, industry [4], agriculture [5], school educations, rehabilitation, and various human motor skill training scenarios, while collaborative robots are being extensively investigated by more researchers and technology companies and may be expected to dominate robot fields in the next few years [6]. Conventional industrial robots have a lot of advantages such as working with precision and speed, but they are relying on high stiffness, high precise parts and components, and complicated control systems. is makes them relatively expensive, inflexible, and dangerous for humans [7]. More- over, due to these disadvantages, such robots are only suitable and efficient for simple and repeated tasks in structured environment. However, the factory production should be more flexible and smart to meet diversity and personalization of customer demand which tends to be mainstream in the future [8]. Correspondingly, robots are required to fulfil more dexterous and compliant tasks to reduce human workload and improve the quality of products. Conventionally, this requires expert modelling and programming skills that only a few people can implement such skill transfer, which dis- courages median or small companies to employ robots in the production line. erefore, an intuitive and augmented approach to human-robot complicated skills transfer will make robot application more practical and remove the virtual cage between human and robot completely [9]. For example, service robot needs to perfectly fit customer’s need in home or office scenarios, and such kind of robots needs to interact with different stages of people with different cognitive and knowledge background. So HRC with intuitive human-robot interface will be compliant and efficient way to extend human Hindawi Publishing Corporation Discrete Dynamics in Nature and Society Volume 2016, Article ID 9126056, 13 pages http://dx.doi.org/10.1155/2016/9126056
Transcript of Research Article An Augmented Discrete-Time...

Research ArticleAn Augmented Discrete-Time Approach forHuman-Robot Collaboration
Peidong Liang Lianzheng Ge Yihuan Liu Lijun Zhao Ruifeng Li and Ke Wang
State Key Lab of Robotics Systems Harbin Institute of Technology Harbin 150001 China
Correspondence should be addressed to Lijun Zhao zhaoljhiteducn
Received 10 December 2015 Accepted 4 February 2016
Academic Editor Paolo Renna
Copyright copy 2016 Peidong Liang et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Human-robot collaboration (HRC) is a key feature to distinguish the new generation of robots from conventional robots RelevantHRC topics have been extensively investigated recently in academic institutes and companies to improve human and robotinteractive performance Generally human motor control regulates human motion adaptively to the external environment withsafety compliance stability and efficiency Inspired by this we propose an augmented approach to make a robot understandhumanmotion behaviors based on human kinematics and human postural impedance adaptation Human kinematics is identifiedby geometry kinematics approach to map human arm configuration as well as stiffness index controlled by hand gesture toanthropomorphic arm While human arm postural stiffness is estimated and calibrated within robot empirical stability regionhuman motion is captured by employing a geometry vector approach based on Kinect A biomimetic controller in discrete-timeis employed to make Baxter robot arm imitate human arm behaviors based on Baxter robot dynamics An object moving task isimplemented to validate the performance of proposed methods based on Baxter robot simulator Results show that the proposedapproach to HRC is intuitive stable efficient and compliant which may have various applications in human-robot collaborationscenarios
1 Introduction
HRC represents most key characters of next generation ofrobots working without cages and sharing the same work-space with human community [1 2] It allows human tointeract with robots physically with safety and complianceguaranteed Therefore HRC has a variety of applications inhome care [3] office industry [4] agriculture [5] schooleducations rehabilitation and various human motor skilltraining scenarios while collaborative robots are beingextensively investigated by more researchers and technologycompanies and may be expected to dominate robot fields inthe next few years [6]
Conventional industrial robots have a lot of advantagessuch as working with precision and speed but they arerelying on high stiffness high precise parts and componentsand complicated control systems This makes them relativelyexpensive inflexible and dangerous for humans [7] More-over due to these disadvantages such robots are only suitable
and efficient for simple and repeated tasks in structuredenvironment However the factory production should bemore flexible and smart tomeet diversity and personalizationof customer demand which tends to be mainstream in thefuture [8] Correspondingly robots are required to fulfilmoredexterous and compliant tasks to reduce human workloadand improve the quality of products Conventionally thisrequires expert modelling and programming skills that onlya few people can implement such skill transfer which dis-courages median or small companies to employ robots inthe production line Therefore an intuitive and augmentedapproach to human-robot complicated skills transfer willmake robot applicationmore practical and remove the virtualcage between human and robot completely [9] For exampleservice robot needs to perfectly fit customerrsquos need in homeor office scenarios and such kind of robots needs to interactwith different stages of people with different cognitive andknowledge background So HRC with intuitive human-robotinterface will be compliant and efficient way to extend human
Hindawi Publishing CorporationDiscrete Dynamics in Nature and SocietyVolume 2016 Article ID 9126056 13 pageshttpdxdoiorg10115520169126056
2 Discrete Dynamics in Nature and Society
Figure 1 Typical human-robot safe collaboration system
and robot workspace and applicable areas On the other handas the new generation of robots namely collaborative robots(eg Figure 1) are expected to share the sameworkspace withhumans safety is a key for collaborative robotics [7] whichis often achieved through complex control systems [10] butrobots are rarely designed to be safe The economic way isto make robot arm human-like and as compliant as humanlimb and impedance of the robots can be adapted to dynamicenvironment [11] Thus the studies on compliant controlhave received increasing attentions [12 13] in the tasksinvolving uncertain and dynamic environment for examplephysical human-robot cooperation [14ndash16] Most existingrelevant research work can be generally classified into threecategories (i) design of compliant mechanism by using active(eg KUKA LBR [17] and Barrett WAM Arm [18]) passive(eg AWAS [19]) or hybrid (eg DLR hand-arm system[20]) robot joints with intrinsic compliance to provide a safeand user friendly interface for implementation of telecontrolby adapting robot joint impedance (ii) online optimisationof impedance regulations for specific tasks in constructedenvironment whereas the impedance tuning algorithms relyon an accurate robot-environmental interaction model [21](iii) biomimetic control instead of automatic control robotcan imitate human compliance and adaptivity by learninghuman stiffness regulation [22ndash24] Therefore telimpedancecontrol which enables a target relation between force anddisplacement [25] is ideal for robots to perform tasks withhuman and environment in a safer and more natural way[26 27]
For an effective HRC with safety compliance and stabil-ity it is crucial to enable the robots to be capable of integratinginteractive cognition andmanipulation with humans similarto the mechanisms involved in human-human interaction[28] while in this paper we carry on a preliminary researchon single human motor adaptation behaviour in specifictasks for example in object moving tasks human tends toexert force along the direction where the stiffness amplitudeis relatively larger in [29] Inspired by human mechanicalimpedance adaptivity to various environments [30] humanmotor skill extractions via EMG and biomimetic learningcontroller [31 32] are developed to achieve more naturaland efficient performance as they directly reflect impedancevariation without disturbing motor control during the taskEMG signals represent muscle activation regulated by centralneutral system (CNS) and can be used to estimate limb
stiffness for compliant demonstration though the preciseestimation is still a challenge due to muscle fatigue noiseperturbation and estimation model error and so forth [33ndash35] In [26] sEMG based human-machine interface wasdesigned for teleimpedance control though without forcefeedback or autonomous controller after transferring humanimpedance regulations to robot Furthermore human canchange arm posture to adapt stiffness as well
AugmentedHRC can be exploited by human armmotion[36] and stiffness profile recognition and imitation Accord-ing to different hardware equipment employed in humanmotion recognition human motion extraction methods canbe divided into two categories (i) contact methods byemployingwearable sensors In [37 38] InertialMeasurementUnits (IMU) are used to collect human motion angles forhumanmotion recognition and interaction with robot whilesuch methods require humans to wear specific deviceswhich may induce inconvenience in HRC (ii) Noncontacttechnology Date et al [39] proposed a vision-based inversekinematics approach to estimate full-body motion of humanmodel which has 23 DOFs via visual cues Noncontactmethods do not need to put any physical devices on humansand provide a natural way to capture human motion thoughit may bring occlusion In addition human gesture also playsa significant role in human-robot interaction
Gesture information acquisition is similar to humanmotion extraction It can be divided into vision-based andwearable sensors-based methods Starner et al [40] andShanableh et al [41] achieved American and Arab sign lan-guage recognition respectively based on vision informationLiang and Ouhyoung [42] and Starner and Pentland [43]and Kim et al [44] recognized their sign languages usingdata collected by Data Glove Although Data Glove has highprecision its high price and cumbersome-wearing preventits extensive usability As for the human motion analysismost researchers employ inverse kinematics method Seven-DOF human arm is a redundant manipulator so whengiven the hand position and attitude there are infinitesolutions for the inverse kinematics Moradi and Lee [45]defined a redundancy circle and used a position as theredundancy parameter to solve this problem Fang and Ding[46] proposed a three-level task-motion planning frameworkand used a human arm triangle space to solve the motionplan of human arm Based on the description of the humanarms posture [47] we proposed a novel approach geometryvector method which can calculate each joint angle of a 7-DOF human arm by just using the 3D points of each jointWe used Kinect sensor [48] (version 20) to get the 3Dcoordinates of each joint Kinect is a depth camera developedby Microsoft Company and can be rapidly used in actiontracking and gesture recognition Furthermore comparedwith other sensors Kinect is a humanized device and it needsno touch with humans
In this paper a virtual Baxter robot setup is employedwith one Baxter robot arm used as slave arm (see Fig-ure 2) Motion estimation from Kinect is utilised to estimatedemonstratorrsquos limb postural stiffness Instead of estimatingabsolute human endpoint stiffness and motion discrete-timestiffness estimation and motion extraction are employed to
Discrete Dynamics in Nature and Society 3
Arm joint state
Robot dynamics
Stiffness index
Biomimeticcontroller
Jacobian
minus
+
Robot joint state
Figure 2 Profile of HRC in discrete-time Human arm endpoint stiffness forward kinematic and postural stiffness are estimated in discrete-time and transfer to Baxter robot via biomimetic controller
eliminate signal drift and the residual errors In Section 2methods are depicted for human arm postural stiffnessestimation and motion extraction as well as discrete-timebiomimetic controller design In Section 3 experimentalsetup is presented Results are revealed in Section 4 followedby conclusion in Section 5
2 Methods
21 Human Arm Postural Stiffness Modelling Relevant re-search work indicates that limb impedance represents human
skill performance [49] Therefore extraction of impedanceregulations from human is a potential way to transfer humanexperienced skills to robots compared to conventional math-ematical modelling Generally human upper limb endpointstiffness is mainly determined by muscle cocontraction andgeometry poseThis means we can adapt our arm stiffness bymuscle cocontraction as well as arm pose change while inthis paper we mainly investigate the effect of arm pose oninteracting with external forces According to [50] humanendpoint stiffness in Cartesian space can be denoted bymuscle stiffness and postural stiffness in
119870119888(119894) =
119869+119879
ℎ(119902(119894minus1)
) 119870119869(119894) minus
[119869+119879
ℎ(119902(119894)) minus 119869+119879
ℎ(119902(119894minus1)
)] 119891ex(119894)
119902(119894)minus 119902(119894minus1)
119869+119879
ℎ(119902(119894)) + 120590 (119894) if 119902
(119894)= 119902(119894minus1)
119870119888(119894 minus 1) if 119902
(119894)= 119902(119894minus1)
(1)
119894 is time constant 119902 isin 1198777 is a vector of 7 joint angles of arm119869ℎ(119902) isin 119877
6times7 is arm Jacobianmatrix119870119888isin 1198776times6 is the endpoint
orCartesian stiffness119870119869isin 1198777times7 is joint stiffness and119891ex isin 119877
6
is the external force applied to endpoint Obviously humanendpoint stiffness mainly depends on Jacobian (posture)joint stiffness gravity and motion The arm joint angles 119902of human will be estimated by Kinect consequently theJacobian matrix 119869(119902) can be calculated using human armjoint angles and skeleton link length According to [51 52]we assume that joint stiffness 119870
119869can be represented as
multiplication of an intrinsic constant stiffness 120582 so 119870119869= 120582
120590(119894 minus 1) is the gravity contribution to the human endpointstiffness
119870119888(119894) = 119869
+119879
ℎ(119902(119894minus1)
) 120582119869+119879
ℎ(119902(119894minus1)
) + 120590 (119894 minus 1)
120582 = 119875 (119894 minus 1) 120576 (119894 minus 1)
(2)
where 120582 isin 1198777times7 and 120576 isin 119877
7times7 are stiffness coefficientsrespectively Here the stiffness index 120582 can be adaptedaccording to different scenarios In this paper we employhand posture 119875 in discrete-time to indicate 120582 variationsFor example fist usually suggests that humans increase armstiffness to keep arm stable against external disturbance oroutput strong force Thus we can employ hand gesture tocontrol robot stiffness index based on empirically identifiedhuman arm stiffness
22 Human Arm Jacobian Estimation Figure 3 shows thereference and link coordinate systems of the 7-DOF humanarm using Denavit-Hartenberg (D-H) method The D-Hparameters of the kinematic model of the human arm arelisted in Table 1 where 119889
3 1198895 and 119897
7are the lengths of upper
arm forearm and palm respectively According to the D-H
4 Discrete Dynamics in Nature and Society
Shoulder Elbow Wrist
Base
Hand
C DE F
x1x0
x2
x3
x4
z0
z1
z2
z3
z4
z5
z6z7
d3 d5 l7
x5
x6
x7
y7
Figure 3 Human arm model and its primary D-H coordinate system and the initial position of each joint angle
Table 1 D-H parameters of the human arm
Joint 120579119894
119889119894
119897119894
120572119894
1 1199021(0∘) 0 0 90
∘
2 1199022(90∘) 0 0 90
∘
3 1199023(minus90∘) 119889
30 90
∘
4 1199024(180∘) 0 0 90
∘
5 1199025(90∘) 119889
50 90
∘
6 1199026(minus90∘) 0 0 90
∘
7 1199027(180∘) 0 119897
70∘
method the description of the coordination transformationfrom frame 119894 to frame 119894 minus 1 is shown in
119894minus1
119879119894
=
[[[[[
[
cos 120579119894minus cos120572
119894sin 120579119894
sin120572119894sin 120579119894119897119894cos 120579119894
sin 120579119894
cos120572119894cos 120579119894minus sin120572
119894cos 120579119894119897119894sin 120579119894
0 sin120572119894
cos120572119894
119889119894
0 0 0 1
]]]]]
]
(3)
Human arm Jacobian matrix 119869ℎ(119902) is related to each angle of
human arm joints and is shown in
119879
119869ℎ(119902) = [
119879
1198691
119879
1198692
119879
1198693
119879
1198694
119879
1198695
119879
1198696
119879
1198697] (4)
where 119879119869119894can be calculated from (5) and (6) and 119894119879
7is the
coordination transformation from frame 119894 to the end-effectorframe and it can be deviated from (7) Consider
119879
119869119894=
[[[[[[[[[[[
[
minus119899119909119901119910+ 119899119910119901119909
minus119900119909119901119910+ 119900119910119901119909
minus119886119909119901119910+ 119886119910119901119909
119899119911
119900119911
119886119911
]]]]]]]]]]]
]
(5)
119894
1198797=
[[[[[
[
119899119909119900119909119886119909119901119909
119899119910119900119910119886119910119901119910
119899119911119900119911119886119911119901119911
0 0 0 1
]]]]]
]
(6)
119894
1198797=119894
119879119894+1sdot119894+1
119879119894+2sdot sdot sdot sdot sdot6
1198797 (7)
Now the problem of getting Jacobian matrix is equalto calculating all of the 7 joint angles By using Kinectsensor we can have the skeleton data of human body directlywhich include 25 joints 3D positions relative to the cameracoordinate as shown in the left of Figure 4 Then thegeometrymodel of human left arm is built as seen in the rightof Figure 4 we take the point HipLeft as the origin of the basecoordinate while119909-axis is in the same direction of vector997888997888rarr119860119874And119910-axis is alongwith vector997888997888rarr119874119862 It is easy to get the normalvector of each axis of the base coordinate997888rarr119883
0997888rarr1198840 and
997888rarr1198850(note
that 997888rarr119883119894is the normal vector of 119909-axis in coordinate 119894)
997888rarr1198830=
997888997888rarr119860119874
100381610038161003816100381610038161003816
997888997888rarr119860119874
100381610038161003816100381610038161003816
997888rarr1198840=
997888997888rarr119874119862
100381610038161003816100381610038161003816
997888997888rarr119874119862
100381610038161003816100381610038161003816
997888rarr1198850=997888rarr1198830times997888rarr1198840
(8)
In order to calculate all of the joint angles correctly twoconditions should exist (i) human should stand straight andkeep the body vertical to the ground as far as possible and(ii) the thumb must be in the same plane with the palmduring their motion because we need the plane consistingof points of thumb wrist and hand to calculate some otherjoint angles These seven angles are all in the joint space andtheir initial positions are displayed in Figure 3The geometryvectormethodweproposed is based on the principle of cosinevalue of two vectors shown in (9) What is more the anglebetween two planes can be got by using their normal vector
Discrete Dynamics in Nature and Society 5
OA
B C
D
E
F
GH
HipLeft
ShoulderLeft
ShoulderRight
HipRight
ElbowLeft
WristLeft
HandLeft
ThumbLeftHandTipLeft
I
J
1205931
12059321205933
1205934
x
z
y 1205935
1205937
D998400
Figure 4 Body skeleton map consisting of 25 joints captured by Kinect and Human arm motion model in joint space
As we all know the scope of the angle between two anglesis from 0 to 120587 thus this should be taken into considerationupon solving the 7 joint angles
cos⟨997888rarr1198811997888rarr1198812⟩ =
997888rarr1198811sdot997888rarr1198812
100381610038161003816100381610038161003816
997888rarr1198811
100381610038161003816100381610038161003816
100381610038161003816100381610038161003816
997888rarr1198812
100381610038161003816100381610038161003816
(9)
As shown in Figure 4 1205931is the shoulder yaw angle It is
simple to find that 1205931is the supplement of the angle between
planes COD and 119909119874119910 1205932is the shoulder pitch angle so it is
the angle between 119910-axis and vector 997888997888rarr119862119863 1205933and 120593
5are the
angles of shoulder roll and elbow roll upon considering theorigin position which is showed in Figure 3 120593
3can be seen
as the angle of planes COD and CDE Upon using the samemethod of solving120593
31205935can be regarded as the angle between
planeCDE and planeDEH 1205934is the angle between upper and
lower arm and it is the angle between vectors 997888997888rarr119863119862 and 997888997888rarr119863119864 1205936
is the angle of lower arm and hand so it is equal to the anglebetween vector 997888997888rarr119864119863 and plane EFH
But computing 1205937 the yaw angle of wrist is challenge
work but here 1205937can be viewed as the angle between 997888rarr119883
5and
997888rarr1198847 where
997888rarr1198847=997888rarr1198857times997888rarr1198837
997888rarr1198837=
997888rarr119864119865
100381610038161003816100381610038161003816
997888rarr119864119865100381610038161003816100381610038161003816
997888rarr1198857=
997888997888rarr119864119867 times
997888rarr119864119865
100381610038161003816100381610038161003816
997888997888rarr119864119867 times
997888rarr119864119865100381610038161003816100381610038161003816
(10)
So now the problem becomes solving 997888rarr1198835 We know that 997888rarr119883
5
must be in the plane ofEFH what ismore997888rarr1198835is perpendicular
to 997888997888rarr119863119864 Thus we suppose that997888rarr1198835= 1198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867 (11)
There are
(1198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867) sdot
997888997888rarr119863119864 = 0
1003816100381610038161003816100381610038161198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867
100381610038161003816100381610038161003816= 1
(12)
Therefore
1205937= ⟨
997888rarr1198835997888rarr1198837⟩ (13)
Up to now all of the 7 joint angles are calculatedThoughthe geometry vector approach we used can meet the demandof most cases there are still some situations where it cannot work well for example the plane consisting of pointsShoulderLeft ElbowLfet and WristLeft does not exist
Then two kinds of experiments have been implementedto verify the performance of the approach The experimentenvironment is an indoor and adequate illumination envi-ronment Only one person stands forward to Kinect in thedistance about 2 meters The first one is the static positionexperiment shown in Figure 5 There is no doubt aboutobversing that the curves of 120593
1 1205932 1205933 1205934 1205936 and 120593
7are in an
accurate and correct variation They are smoothing and thefluctuation is so tiny that can be ignored But the fluctuationof 1205935is obvious The reason is that in this situation the
plane CDE consisting of points ShoulderLeft ElbowLeft andWristLeft is not stable because the positions captured byKinect of these three points are almost collinear therefore thenormal vector of the plane will jitter in the precision scope ofthe sensor Although there are indeed some fluctuations of
6 Discrete Dynamics in Nature and Society
Value of seven angles at initial position
Valu
e of a
ngle
s
0
05
1
15
2
25
3
35
50 100 150 200 250 3000Frames
120593112059321205933
120593512059361205937
1205934
Figure 5The initial positions of all joint angles Operator stands statically in front of Kinect and keeps his upper and lower arm in a line andhorizontal just as showed in the left picture The right picture presents the variation of 7 joint angles in successive frames
the curves their overall trends are correct and acceptablewhich demonstrates that the approach to get the values ofthese 7 joint angles works well in static action situation
Figures 6 and 7 are the two dynamic actions which repre-sent the variation of the upper arm and forearm respectivelynamely the joint angles 120593
3and 120593
5 It is evident to find
that angles 1205933and 120593
5have a periodic and regular variation
with the rotation of upper and lower arm from Figures 6and 7 These trajectories are consistent with the expectationindicating that our method is in good performance
In the end a simulation experiment was carried out toillustrate the real time performance of our approach in realenvironment The simulation platform used in this paper isBaxter robot model Baxter robot has two anthropomorphicarms that are all with 7 DOFs The experiment flow diagramcan be seen in Figure 8 From the results of this experimentwe observed that all of these 7 angles of the robot armswere changed smoothly along with variation of the operatorrsquosarm and the motions of both are similar but not identicalbecause of the different size of them which shows thatthe approach we proposed is feasible and effective On theother hand through the coordinate transformation betweenhuman coordinate and Baxter coordinate and the trial datawe can get the transformation matrix 119879 and offset matrix 119861from human coordinate system to robot coordinate That is
120579Robot = 119879120579Human + 119861 (14)
where
119879 =
[[[[[[[[[[[[[[
[
1 0 0 0 0 0 0
0 minus1 0 0 0 0 0
0 0 1 0 0 0 0
0 0 0 minus1 0 0 0
0 0 0 0 1 0 0
0 0 0 0 0 1 0
0 0 0 0 0 0 1
]]]]]]]]]]]]]]
]
119861 =
[[[[[[[[[[[[[[
[
minus246
120587
2
minus120587
120587
minus089
minus120587
0
]]]]]]]]]]]]]]
]
(15)
23 Discrete-Time Biomimetic Controller In this section adiscrete-time biomimetic controller with visual feedback ispresented for human and robot interaction Flash and Hogan[53] conducted several experiments aiming atmathematicallyrepresenting the kinematic part of the model They foundthat for a movement starting and ending with zero velocity(to and from end positions) the velocity profile of the handin a Cartesian coordinate system typically followed a bellcurve distributionThis velocity curve once integrated givesthe general kinematic representation of the trajectory of thehuman hand during a typical pushing task This relation isgiven by
119901 (119896) = 1198750+ Δ119875 (6119896
5
minus 151198964
+ 101198963
)
0 le 119896 =119905119894
119879le 1
(16)
where Δ119875 is the displacement performed in the trajectory 119896is the time constant 119875
0is the initial position vector and 119879 is
the total time required to perform the trajectoryPrevious researches [54ndash56] demonstrated the capability
of impedance control to be used as a reactive model to followthis kinematic model for human-robot collaboration (HRC)Three impedance parameters can be applied to this modelnamely mass damping and stiffness Kosuge and Kazamura
Discrete Dynamics in Nature and Society 7
50 100 150 200 250 3000Frames
Valu
e of a
ngle
0
05
1
15
2
25
3Value variation of 1205933 in successive frames
Figure 6 The operator keeps his body still and only rotates his arm circularly constantly and with a low and smooth speed from the originposition to limiting position
Value variation of 1205935 in successive frames
Valu
e of a
ngle
0
05
1
15
2
25
3
50 100 150 200 2500Frames
Figure 7The operator keeps his body still and only rotates his elbow circularly constantly and with a low and smooth speed from the originposition to limiting position
Host computer LinuxROS
Joint point Cartesian positions
Joint angles and hand posture
UDP sending data
Joint angles and stiffness variations
Torque control
Visual feedback
Figure 8 The simulation experiment flow diagram
8 Discrete Dynamics in Nature and Society
Feedforward
Impedance
Robotdynamics
Plannedmovement
++
+
Actualmovement
P(k)
p p p
p pr pr
minus
Ff
Fb
Figure 9 Scheme of HRC control model The feedforward 119865119891
corresponds to the force of human and 119865119887is force feedback based
on PD impedance controller which is employed to regulate robotjoint or endpoint impedance
[54] demonstrated experimentally that the effect of stiffnessparameters is negligible Hence this model can be expressedas
119865119891= 119898 + 119888 (17)
where 119865119891is a force vector between the human and robot119898 is
a virtual mass parameter 119888 is a virtual damping parameterand are respectively the velocity and accelerationvectors which can be derived from (16)
The torque input to the slave arm is produced by PDcontroller defined below in (18) which also employs a gravitycompensator 119865
119892 Consider
119865119887= 119863119887Δ + 119870
119887Δ119883 + 119865
119892 (18)
where 119863119887 119870119887are slave arm endpoint damping and stiffness
respectively The stiffness 119870119887is set in real time according to
the estimated stiffness at endpoint of the human operatorrsquoslimb and119863
119887is set proportional to119870
119887with a fixed ratio to be
specified by the designerThe endpoint force 119865
119887in Cartesian space needs to be
transformed to joint space by (19) in order to be implementedon the robot arm joint torque controller Consider
120591 = 119869119879
119865119887 (19)
where 120591 denotes robot joint torques 119865119887denotes robot end-
point force in Cartesian space and 119869 represents robot armJacobian Therefore the stiffness in joint space of the slaverobot can be derived from the stiffness in Cartesian spaceaccording to
119870119902
119903asymp 119869119879
119870ℎ119869 (20)
where 119870119902119903denotes robot joint stiffness and 119870
ℎis human arm
endpoint stiffness The model (shown in Figure 9) of forceand impedance enables simulation of a movement of the armor leg along a planned trajectory 119902(119896) in an environmentcharacterized by force and impedance First the torque iscomputed using (19) and (18) then impedance is used tocompute the effect of the feedback control item on human-robot interactions
3 Experimental Setup
The experimental platform is a dual-arm Baxter robot whichconsists of a torso 2-degree-of-freedom (2-DOF) head dualarms with 7 DOFs integrated cameras sonar torque sensorsencoders and direct programming access via Robot Operat-ing System (ROS) interface Each joint of Baxter robot arm isdriven by 7 serial elastic actuators (SEA) with intrinsic safetyMoreover joint stiffness and damping can be modified underBaxter robot torque control mode which is simplified as PDimpedance control law in this paper
To verify the efficiency of proposed HRC methodhuman-robot telemanipulation for moving objects (shown inFigure 10) is implemented with comparative tests under twodifferent scenarios that is low stiffness mode and humanoperated mode The robot left arm serves as slave armwhich is guided by human operatorrsquos limb endpoint Thehuman left arm serves as master arm As for the Baxterrobot simulator setup first Baxter simulator is launchedaccording to Baxter robot wiki guideline [57] Then inserta book shelf from gazebo environment library and 4 brickswhich are configured as shown in Figure 10 Human operatormoves Baxter left arm via visual feedback and adapts armpose to move the bricks to enable Baxter robot to imitatehuman motor adaptive behaviours by means of UDP com-munications between host computer and Baxter simulator Inaddition Baxter robot initial stiffness is set with a small value(Left S0 30 Left S1 30 Left E0 30 Left E1 20 Left W0 20Left W1 15 Left W2 10 unit Nmsdotrad)
4 Results
As indicated in Section 3 the experiment is based on twoscenarios as shown in Figure 11 Baxter motion is regulatedby human operator in real time The human operatorrsquos armis simplified as 7-DOF manipulator corresponding to Baxterrobot joints Meanwhile human hand posture is captured byKinect to control Baxter robot stiffness adaptations whichvary according to time of posture maintenance
Test I Human operator teleoperates Baxter robot usingKinect which extracts humanmotion regulations in real timeFirst the human operator guides Baxter to the book shelf andmake a precise positioning and calibration by visual feedbackSecond humanoperator employs pose 1 shown in Figure 11(a)to move the object but the object does not move at allNaturally human operator changes his arm configuration topose 2 and moves the object again and still cannot movethe object As indicated in Figure 13 Baxter robot can adaptits stiffness using different pose as well however the initialstiffness set on Baxter robot is too small to move the objectwith two poses
Test II As shown in Figure 13(b) human operator interactswith Baxter robot with human motion intention detectionbased on Kinect Human operator hand gesture is employedto control Baxter robot stiffness variations as shown inFigure 12 Generally fist means human operator strengthensmuscles to increase force to fulfil a specific task Thumb-up
Discrete Dynamics in Nature and Society 9
Brick5kg
Figure 10 Experimental setup for human and Baxter robot collaboration intuitively and compliantly in teleoperation scenario The virtualBaxter robot environment is based on ROS and gazebo [58] Four bricks are put on the shelf and their total weights are modified to 5 kgBaxter robot is supposed to move the four bricks with different arm configurations
(a) Object moving with pose 1 (b) Object moving with pose 2
Figure 11 Scheme of Baxter robot moving an object by two different poses The red arrows denote the force directions of the two posesrespectively
t
Stiff
ness
inde
x
0
1
Figure 12 Baxter robot stiffness control by human hand gestures fist increasing stiffness with a threshold thumb-up holding currentstiffness and finger spread decreasing stiffness
10 Discrete Dynamics in Nature and Society
02
minus02
06
1
5
10
15
20
40
60
Endp
oint
stiff
ness
(Nm
)En
dpoi
nt d
ispla
cem
ent (
m)
Start Pose 1 Pose 2 End
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(a) Object moving test I
Endp
oint
stiff
ness
(Nm
)
02
minus02
06
1
Endp
oint
disp
lace
men
t (m
)
Pose 1 Pose 2
5
15
25
35
45
40
80
120
EndStart
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(b) Object moving test II
Figure 13 Object moving test results (a) object moving without human postural stiffness index transfer (b) object moving with humanpostural stiffness transfer Both the two tests are composed of four steps start to move Baxter robot endpoint to the target move objects usingpose 1 and move objects with pose 2 and finally finish moving objects The predominated Baxter robot joint S0 is selected to track the torquevariations during the tests
denotes that the Baxter robot stiffness is sufficient to completetasks for example moving objects in this test We utilisefinger spread pose to present that Baxter robot needs todecrease stiffness to return compliant In this way Baxter canunderstand human motion intention simply but stably andefficiently
In this test human operator replicates motion that hasbeen done in test I During the first pose inmoving the objectBaxter can not complete the task while human operatorincreases Baxter stiffness via hand gesture However Baxter
can not make it as well In the second pose in moving objecthuman uses the same way to control Baxter motion andstiffness as well and Baxter can finish the task easily Whenthe task is completed human operator spreads fingers tomake Baxter robot return compliant
5 Conclusion
In this paper we have developed a natural interface indiscrete-time for human-robot collaboration by making
Discrete Dynamics in Nature and Society 11
robot understand human motion intention especially forstiffness adaptation instead of using EMG signals which needto be detected by adhering electrodes on the skin In additionwe used a geometry vector approach to extract human arm7-DOF Jacobian for stiffness transformation from Cartesianspace to joint space in real time A biomimetic controller isemployed for human and robot motion regulation transferExperiment validated that the proposed approach to HRCwas intuitive compliant and efficient It may have additionalapplications in various HRC scenarios
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported in part by State Key Laboratoryof Robotics and System (HIT) Grant SKLRS-2014-MS-05SKLRS201405B National Natural Science Foundation ofChina (NSFC) Grant 61273339 Heilongjiang Provincial Nat-ural Science Foundation of China Grants QC2014C072 andF2015010 The authors would like to acknowledge supportfromMr Chao Wang in the experiment implementation
References
[1] S A GreenM Billinghurst X Chen and J G Chase ldquoHuman-robot collaboration a literature review and augmented realityapproach in designrdquo International Journal of Advanced RoboticSystems vol 5 no 1 pp 1ndash18 2008
[2] B Chandrasekaran and J M Conrad ldquoHuman-robot collabo-ration a surveyrdquo in Proceedings of the IEEE SoutheastCon 2015pp 1ndash8 April 2015
[3] J-M Lu and Y-L Hsu ldquoTelepresence robots for medicaland homecare applicationsrdquo in Contemporary Issues in SystemsScience and Engineering M Zhou H-X Li and M WeijnenEds chapter 21 pp 725ndash735 JohnWiley amp Sons Hoboken NJUSA 2015
[4] T Arai R Kato and M Fujita ldquoAssessment of operator stressinduced by robot collaboration in assemblyrdquo CIRP AnnalsmdashManufacturing Technology vol 59 no 1 pp 5ndash8 2010
[5] A Bechar and Y Edan ldquoHuman-robot collaboration forimproved target recognition of agricultural robotsrdquo IndustrialRobot vol 30 no 5 pp 432ndash436 2003
[6] Top 10 emerging technologies of 2015 httpsagendaweforumorg
[7] B Matthias S Kock H Jerregard M Kallman and I Lund-berg ldquoSafety of collaborative industrial robots certificationpossibilities for a collaborative assembly robot conceptrdquo inProceedings of the IEEE International Symposium on Assemblyand Manufacturing (ISAM rsquo11) pp 1ndash6 Tampere Finland May2011
[8] V Morabito ldquoBig data driven business modelsrdquo in Big Data andAnalytics pp 65ndash80 Springer 2015
[9] B Scassellati and K M Tsui ldquoCo-robots humans and robotsoperating as partnersrdquo in Handbook of Science and TechnologyConvergence pp 1ndash10 Springer 2015
[10] W He A O David Z Yin and C Sun ldquoNeural networkcontrol of a robotic manipulator with input deadzone and
output constraintrdquo IEEE Transactions on Systems Man andCybernetics Systems 2015
[11] W He Y Chen and Z Yin ldquoAdaptive neural network controlof an uncertain robot with full-state constraintsrdquo IEEE Transac-tions on Cybernetics vol 46 no 3 pp 620ndash629 2016
[12] C Reardon H Tan B Kannan and L DeRose ldquoTowardssafe robot-human collaboration systems using human posedetectionrdquo in Proceedings of the IEEE International Conferenceon Technologies for Practical robot Applications (TePRA rsquo15) pp1ndash6 Woburn Mass USA May 2015
[13] W He Y Dong and C Sun ldquoAdaptive neural impedancecontrol of a robotic manipulator with input saturationrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 46no 3 pp 334ndash344 2016
[14] K Kronander and A Billard ldquoLearning compliant manipula-tion through kinesthetic and tactile human-robot interactionrdquoIEEE Transactions on Haptics vol 7 no 3 pp 367ndash380 2014
[15] L Peternel T Petric E Oztop and J Babic ldquoTeaching robots tocooperate with humans in dynamic manipulation tasks basedon multi-modal human-in-the-loop approachrdquo AutonomousRobots vol 36 no 1-2 pp 123ndash136 2014
[16] L D Rozo S Calinon D Caldwell P Jimenez and C TorrasldquoLearning collaborative impedance-based robot behaviorsrdquo inProceedings of the 27th AAAI Conference on Artificial Intelli-gence Bellevue Wash USA July 2013
[17] Kuka lbr robot profile March 2015 httpwwwkuka-roboticscomenproductsindustrial robotssensitiv
[18] Barrett wam arm profile 2015 httpwwwbarrettcomrobotproducts-armhtm
[19] A Jafari N G Tsagarakis and D G Caldwell ldquoAwAS-II a newactuator with adjustable stiffness based on the novel principle ofadaptable pivot point and variable lever ratiordquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo11) pp 4638ndash4643 Shanghai China May 2011
[20] M Grebenstein A Albu-Schaffer T Bahls et al ldquoThe DLRhand arm systemrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 3175ndash3182 Shanghai China May 2011
[21] S P Chan and H C Liaw ldquoGeneralized impedance controlof robot for assembly tasks requiring compliant manipulationrdquoIEEE Transactions on Industrial Electronics vol 43 no 4 pp453ndash461 1996
[22] J Buchli F Stulp E Theodorou and S Schaal ldquoLearningvariable impedance controlrdquo International Journal of RoboticsResearch vol 30 no 7 pp 820ndash833 2011
[23] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 Phuket Thailand December 2011
[24] A Ajoudani M Gabiccini N Tsagarakis A Albu-Schafferand A Bicchi ldquoTeleImpedance Exploring the role of common-mode and configuration- dependant stiffnessrdquo in Proceedingsof the 12th IEEE-RAS International Conference on HumanoidRobots Humanoids 2012 pp 363ndash369 Osaka Japan December2012
[25] N Hogan ldquoImpedance control an approach to manipulationpart IImdashimplementationrdquo Journal of Dynamic Systems Mea-surement and Control vol 107 no 1 pp 8ndash16 1985
[26] A Ajoudani N Tsagarakis and A Bicchi ldquoTele-impedanceteleoperation with impedance regulation using a body-machine
12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Discrete Dynamics in Nature and Society
Figure 1 Typical human-robot safe collaboration system
and robot workspace and applicable areas On the other handas the new generation of robots namely collaborative robots(eg Figure 1) are expected to share the sameworkspace withhumans safety is a key for collaborative robotics [7] whichis often achieved through complex control systems [10] butrobots are rarely designed to be safe The economic way isto make robot arm human-like and as compliant as humanlimb and impedance of the robots can be adapted to dynamicenvironment [11] Thus the studies on compliant controlhave received increasing attentions [12 13] in the tasksinvolving uncertain and dynamic environment for examplephysical human-robot cooperation [14ndash16] Most existingrelevant research work can be generally classified into threecategories (i) design of compliant mechanism by using active(eg KUKA LBR [17] and Barrett WAM Arm [18]) passive(eg AWAS [19]) or hybrid (eg DLR hand-arm system[20]) robot joints with intrinsic compliance to provide a safeand user friendly interface for implementation of telecontrolby adapting robot joint impedance (ii) online optimisationof impedance regulations for specific tasks in constructedenvironment whereas the impedance tuning algorithms relyon an accurate robot-environmental interaction model [21](iii) biomimetic control instead of automatic control robotcan imitate human compliance and adaptivity by learninghuman stiffness regulation [22ndash24] Therefore telimpedancecontrol which enables a target relation between force anddisplacement [25] is ideal for robots to perform tasks withhuman and environment in a safer and more natural way[26 27]
For an effective HRC with safety compliance and stabil-ity it is crucial to enable the robots to be capable of integratinginteractive cognition andmanipulation with humans similarto the mechanisms involved in human-human interaction[28] while in this paper we carry on a preliminary researchon single human motor adaptation behaviour in specifictasks for example in object moving tasks human tends toexert force along the direction where the stiffness amplitudeis relatively larger in [29] Inspired by human mechanicalimpedance adaptivity to various environments [30] humanmotor skill extractions via EMG and biomimetic learningcontroller [31 32] are developed to achieve more naturaland efficient performance as they directly reflect impedancevariation without disturbing motor control during the taskEMG signals represent muscle activation regulated by centralneutral system (CNS) and can be used to estimate limb
stiffness for compliant demonstration though the preciseestimation is still a challenge due to muscle fatigue noiseperturbation and estimation model error and so forth [33ndash35] In [26] sEMG based human-machine interface wasdesigned for teleimpedance control though without forcefeedback or autonomous controller after transferring humanimpedance regulations to robot Furthermore human canchange arm posture to adapt stiffness as well
AugmentedHRC can be exploited by human armmotion[36] and stiffness profile recognition and imitation Accord-ing to different hardware equipment employed in humanmotion recognition human motion extraction methods canbe divided into two categories (i) contact methods byemployingwearable sensors In [37 38] InertialMeasurementUnits (IMU) are used to collect human motion angles forhumanmotion recognition and interaction with robot whilesuch methods require humans to wear specific deviceswhich may induce inconvenience in HRC (ii) Noncontacttechnology Date et al [39] proposed a vision-based inversekinematics approach to estimate full-body motion of humanmodel which has 23 DOFs via visual cues Noncontactmethods do not need to put any physical devices on humansand provide a natural way to capture human motion thoughit may bring occlusion In addition human gesture also playsa significant role in human-robot interaction
Gesture information acquisition is similar to humanmotion extraction It can be divided into vision-based andwearable sensors-based methods Starner et al [40] andShanableh et al [41] achieved American and Arab sign lan-guage recognition respectively based on vision informationLiang and Ouhyoung [42] and Starner and Pentland [43]and Kim et al [44] recognized their sign languages usingdata collected by Data Glove Although Data Glove has highprecision its high price and cumbersome-wearing preventits extensive usability As for the human motion analysismost researchers employ inverse kinematics method Seven-DOF human arm is a redundant manipulator so whengiven the hand position and attitude there are infinitesolutions for the inverse kinematics Moradi and Lee [45]defined a redundancy circle and used a position as theredundancy parameter to solve this problem Fang and Ding[46] proposed a three-level task-motion planning frameworkand used a human arm triangle space to solve the motionplan of human arm Based on the description of the humanarms posture [47] we proposed a novel approach geometryvector method which can calculate each joint angle of a 7-DOF human arm by just using the 3D points of each jointWe used Kinect sensor [48] (version 20) to get the 3Dcoordinates of each joint Kinect is a depth camera developedby Microsoft Company and can be rapidly used in actiontracking and gesture recognition Furthermore comparedwith other sensors Kinect is a humanized device and it needsno touch with humans
In this paper a virtual Baxter robot setup is employedwith one Baxter robot arm used as slave arm (see Fig-ure 2) Motion estimation from Kinect is utilised to estimatedemonstratorrsquos limb postural stiffness Instead of estimatingabsolute human endpoint stiffness and motion discrete-timestiffness estimation and motion extraction are employed to
Discrete Dynamics in Nature and Society 3
Arm joint state
Robot dynamics
Stiffness index
Biomimeticcontroller
Jacobian
minus
+
Robot joint state
Figure 2 Profile of HRC in discrete-time Human arm endpoint stiffness forward kinematic and postural stiffness are estimated in discrete-time and transfer to Baxter robot via biomimetic controller
eliminate signal drift and the residual errors In Section 2methods are depicted for human arm postural stiffnessestimation and motion extraction as well as discrete-timebiomimetic controller design In Section 3 experimentalsetup is presented Results are revealed in Section 4 followedby conclusion in Section 5
2 Methods
21 Human Arm Postural Stiffness Modelling Relevant re-search work indicates that limb impedance represents human
skill performance [49] Therefore extraction of impedanceregulations from human is a potential way to transfer humanexperienced skills to robots compared to conventional math-ematical modelling Generally human upper limb endpointstiffness is mainly determined by muscle cocontraction andgeometry poseThis means we can adapt our arm stiffness bymuscle cocontraction as well as arm pose change while inthis paper we mainly investigate the effect of arm pose oninteracting with external forces According to [50] humanendpoint stiffness in Cartesian space can be denoted bymuscle stiffness and postural stiffness in
119870119888(119894) =
119869+119879
ℎ(119902(119894minus1)
) 119870119869(119894) minus
[119869+119879
ℎ(119902(119894)) minus 119869+119879
ℎ(119902(119894minus1)
)] 119891ex(119894)
119902(119894)minus 119902(119894minus1)
119869+119879
ℎ(119902(119894)) + 120590 (119894) if 119902
(119894)= 119902(119894minus1)
119870119888(119894 minus 1) if 119902
(119894)= 119902(119894minus1)
(1)
119894 is time constant 119902 isin 1198777 is a vector of 7 joint angles of arm119869ℎ(119902) isin 119877
6times7 is arm Jacobianmatrix119870119888isin 1198776times6 is the endpoint
orCartesian stiffness119870119869isin 1198777times7 is joint stiffness and119891ex isin 119877
6
is the external force applied to endpoint Obviously humanendpoint stiffness mainly depends on Jacobian (posture)joint stiffness gravity and motion The arm joint angles 119902of human will be estimated by Kinect consequently theJacobian matrix 119869(119902) can be calculated using human armjoint angles and skeleton link length According to [51 52]we assume that joint stiffness 119870
119869can be represented as
multiplication of an intrinsic constant stiffness 120582 so 119870119869= 120582
120590(119894 minus 1) is the gravity contribution to the human endpointstiffness
119870119888(119894) = 119869
+119879
ℎ(119902(119894minus1)
) 120582119869+119879
ℎ(119902(119894minus1)
) + 120590 (119894 minus 1)
120582 = 119875 (119894 minus 1) 120576 (119894 minus 1)
(2)
where 120582 isin 1198777times7 and 120576 isin 119877
7times7 are stiffness coefficientsrespectively Here the stiffness index 120582 can be adaptedaccording to different scenarios In this paper we employhand posture 119875 in discrete-time to indicate 120582 variationsFor example fist usually suggests that humans increase armstiffness to keep arm stable against external disturbance oroutput strong force Thus we can employ hand gesture tocontrol robot stiffness index based on empirically identifiedhuman arm stiffness
22 Human Arm Jacobian Estimation Figure 3 shows thereference and link coordinate systems of the 7-DOF humanarm using Denavit-Hartenberg (D-H) method The D-Hparameters of the kinematic model of the human arm arelisted in Table 1 where 119889
3 1198895 and 119897
7are the lengths of upper
arm forearm and palm respectively According to the D-H
4 Discrete Dynamics in Nature and Society
Shoulder Elbow Wrist
Base
Hand
C DE F
x1x0
x2
x3
x4
z0
z1
z2
z3
z4
z5
z6z7
d3 d5 l7
x5
x6
x7
y7
Figure 3 Human arm model and its primary D-H coordinate system and the initial position of each joint angle
Table 1 D-H parameters of the human arm
Joint 120579119894
119889119894
119897119894
120572119894
1 1199021(0∘) 0 0 90
∘
2 1199022(90∘) 0 0 90
∘
3 1199023(minus90∘) 119889
30 90
∘
4 1199024(180∘) 0 0 90
∘
5 1199025(90∘) 119889
50 90
∘
6 1199026(minus90∘) 0 0 90
∘
7 1199027(180∘) 0 119897
70∘
method the description of the coordination transformationfrom frame 119894 to frame 119894 minus 1 is shown in
119894minus1
119879119894
=
[[[[[
[
cos 120579119894minus cos120572
119894sin 120579119894
sin120572119894sin 120579119894119897119894cos 120579119894
sin 120579119894
cos120572119894cos 120579119894minus sin120572
119894cos 120579119894119897119894sin 120579119894
0 sin120572119894
cos120572119894
119889119894
0 0 0 1
]]]]]
]
(3)
Human arm Jacobian matrix 119869ℎ(119902) is related to each angle of
human arm joints and is shown in
119879
119869ℎ(119902) = [
119879
1198691
119879
1198692
119879
1198693
119879
1198694
119879
1198695
119879
1198696
119879
1198697] (4)
where 119879119869119894can be calculated from (5) and (6) and 119894119879
7is the
coordination transformation from frame 119894 to the end-effectorframe and it can be deviated from (7) Consider
119879
119869119894=
[[[[[[[[[[[
[
minus119899119909119901119910+ 119899119910119901119909
minus119900119909119901119910+ 119900119910119901119909
minus119886119909119901119910+ 119886119910119901119909
119899119911
119900119911
119886119911
]]]]]]]]]]]
]
(5)
119894
1198797=
[[[[[
[
119899119909119900119909119886119909119901119909
119899119910119900119910119886119910119901119910
119899119911119900119911119886119911119901119911
0 0 0 1
]]]]]
]
(6)
119894
1198797=119894
119879119894+1sdot119894+1
119879119894+2sdot sdot sdot sdot sdot6
1198797 (7)
Now the problem of getting Jacobian matrix is equalto calculating all of the 7 joint angles By using Kinectsensor we can have the skeleton data of human body directlywhich include 25 joints 3D positions relative to the cameracoordinate as shown in the left of Figure 4 Then thegeometrymodel of human left arm is built as seen in the rightof Figure 4 we take the point HipLeft as the origin of the basecoordinate while119909-axis is in the same direction of vector997888997888rarr119860119874And119910-axis is alongwith vector997888997888rarr119874119862 It is easy to get the normalvector of each axis of the base coordinate997888rarr119883
0997888rarr1198840 and
997888rarr1198850(note
that 997888rarr119883119894is the normal vector of 119909-axis in coordinate 119894)
997888rarr1198830=
997888997888rarr119860119874
100381610038161003816100381610038161003816
997888997888rarr119860119874
100381610038161003816100381610038161003816
997888rarr1198840=
997888997888rarr119874119862
100381610038161003816100381610038161003816
997888997888rarr119874119862
100381610038161003816100381610038161003816
997888rarr1198850=997888rarr1198830times997888rarr1198840
(8)
In order to calculate all of the joint angles correctly twoconditions should exist (i) human should stand straight andkeep the body vertical to the ground as far as possible and(ii) the thumb must be in the same plane with the palmduring their motion because we need the plane consistingof points of thumb wrist and hand to calculate some otherjoint angles These seven angles are all in the joint space andtheir initial positions are displayed in Figure 3The geometryvectormethodweproposed is based on the principle of cosinevalue of two vectors shown in (9) What is more the anglebetween two planes can be got by using their normal vector
Discrete Dynamics in Nature and Society 5
OA
B C
D
E
F
GH
HipLeft
ShoulderLeft
ShoulderRight
HipRight
ElbowLeft
WristLeft
HandLeft
ThumbLeftHandTipLeft
I
J
1205931
12059321205933
1205934
x
z
y 1205935
1205937
D998400
Figure 4 Body skeleton map consisting of 25 joints captured by Kinect and Human arm motion model in joint space
As we all know the scope of the angle between two anglesis from 0 to 120587 thus this should be taken into considerationupon solving the 7 joint angles
cos⟨997888rarr1198811997888rarr1198812⟩ =
997888rarr1198811sdot997888rarr1198812
100381610038161003816100381610038161003816
997888rarr1198811
100381610038161003816100381610038161003816
100381610038161003816100381610038161003816
997888rarr1198812
100381610038161003816100381610038161003816
(9)
As shown in Figure 4 1205931is the shoulder yaw angle It is
simple to find that 1205931is the supplement of the angle between
planes COD and 119909119874119910 1205932is the shoulder pitch angle so it is
the angle between 119910-axis and vector 997888997888rarr119862119863 1205933and 120593
5are the
angles of shoulder roll and elbow roll upon considering theorigin position which is showed in Figure 3 120593
3can be seen
as the angle of planes COD and CDE Upon using the samemethod of solving120593
31205935can be regarded as the angle between
planeCDE and planeDEH 1205934is the angle between upper and
lower arm and it is the angle between vectors 997888997888rarr119863119862 and 997888997888rarr119863119864 1205936
is the angle of lower arm and hand so it is equal to the anglebetween vector 997888997888rarr119864119863 and plane EFH
But computing 1205937 the yaw angle of wrist is challenge
work but here 1205937can be viewed as the angle between 997888rarr119883
5and
997888rarr1198847 where
997888rarr1198847=997888rarr1198857times997888rarr1198837
997888rarr1198837=
997888rarr119864119865
100381610038161003816100381610038161003816
997888rarr119864119865100381610038161003816100381610038161003816
997888rarr1198857=
997888997888rarr119864119867 times
997888rarr119864119865
100381610038161003816100381610038161003816
997888997888rarr119864119867 times
997888rarr119864119865100381610038161003816100381610038161003816
(10)
So now the problem becomes solving 997888rarr1198835 We know that 997888rarr119883
5
must be in the plane ofEFH what ismore997888rarr1198835is perpendicular
to 997888997888rarr119863119864 Thus we suppose that997888rarr1198835= 1198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867 (11)
There are
(1198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867) sdot
997888997888rarr119863119864 = 0
1003816100381610038161003816100381610038161198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867
100381610038161003816100381610038161003816= 1
(12)
Therefore
1205937= ⟨
997888rarr1198835997888rarr1198837⟩ (13)
Up to now all of the 7 joint angles are calculatedThoughthe geometry vector approach we used can meet the demandof most cases there are still some situations where it cannot work well for example the plane consisting of pointsShoulderLeft ElbowLfet and WristLeft does not exist
Then two kinds of experiments have been implementedto verify the performance of the approach The experimentenvironment is an indoor and adequate illumination envi-ronment Only one person stands forward to Kinect in thedistance about 2 meters The first one is the static positionexperiment shown in Figure 5 There is no doubt aboutobversing that the curves of 120593
1 1205932 1205933 1205934 1205936 and 120593
7are in an
accurate and correct variation They are smoothing and thefluctuation is so tiny that can be ignored But the fluctuationof 1205935is obvious The reason is that in this situation the
plane CDE consisting of points ShoulderLeft ElbowLeft andWristLeft is not stable because the positions captured byKinect of these three points are almost collinear therefore thenormal vector of the plane will jitter in the precision scope ofthe sensor Although there are indeed some fluctuations of
6 Discrete Dynamics in Nature and Society
Value of seven angles at initial position
Valu
e of a
ngle
s
0
05
1
15
2
25
3
35
50 100 150 200 250 3000Frames
120593112059321205933
120593512059361205937
1205934
Figure 5The initial positions of all joint angles Operator stands statically in front of Kinect and keeps his upper and lower arm in a line andhorizontal just as showed in the left picture The right picture presents the variation of 7 joint angles in successive frames
the curves their overall trends are correct and acceptablewhich demonstrates that the approach to get the values ofthese 7 joint angles works well in static action situation
Figures 6 and 7 are the two dynamic actions which repre-sent the variation of the upper arm and forearm respectivelynamely the joint angles 120593
3and 120593
5 It is evident to find
that angles 1205933and 120593
5have a periodic and regular variation
with the rotation of upper and lower arm from Figures 6and 7 These trajectories are consistent with the expectationindicating that our method is in good performance
In the end a simulation experiment was carried out toillustrate the real time performance of our approach in realenvironment The simulation platform used in this paper isBaxter robot model Baxter robot has two anthropomorphicarms that are all with 7 DOFs The experiment flow diagramcan be seen in Figure 8 From the results of this experimentwe observed that all of these 7 angles of the robot armswere changed smoothly along with variation of the operatorrsquosarm and the motions of both are similar but not identicalbecause of the different size of them which shows thatthe approach we proposed is feasible and effective On theother hand through the coordinate transformation betweenhuman coordinate and Baxter coordinate and the trial datawe can get the transformation matrix 119879 and offset matrix 119861from human coordinate system to robot coordinate That is
120579Robot = 119879120579Human + 119861 (14)
where
119879 =
[[[[[[[[[[[[[[
[
1 0 0 0 0 0 0
0 minus1 0 0 0 0 0
0 0 1 0 0 0 0
0 0 0 minus1 0 0 0
0 0 0 0 1 0 0
0 0 0 0 0 1 0
0 0 0 0 0 0 1
]]]]]]]]]]]]]]
]
119861 =
[[[[[[[[[[[[[[
[
minus246
120587
2
minus120587
120587
minus089
minus120587
0
]]]]]]]]]]]]]]
]
(15)
23 Discrete-Time Biomimetic Controller In this section adiscrete-time biomimetic controller with visual feedback ispresented for human and robot interaction Flash and Hogan[53] conducted several experiments aiming atmathematicallyrepresenting the kinematic part of the model They foundthat for a movement starting and ending with zero velocity(to and from end positions) the velocity profile of the handin a Cartesian coordinate system typically followed a bellcurve distributionThis velocity curve once integrated givesthe general kinematic representation of the trajectory of thehuman hand during a typical pushing task This relation isgiven by
119901 (119896) = 1198750+ Δ119875 (6119896
5
minus 151198964
+ 101198963
)
0 le 119896 =119905119894
119879le 1
(16)
where Δ119875 is the displacement performed in the trajectory 119896is the time constant 119875
0is the initial position vector and 119879 is
the total time required to perform the trajectoryPrevious researches [54ndash56] demonstrated the capability
of impedance control to be used as a reactive model to followthis kinematic model for human-robot collaboration (HRC)Three impedance parameters can be applied to this modelnamely mass damping and stiffness Kosuge and Kazamura
Discrete Dynamics in Nature and Society 7
50 100 150 200 250 3000Frames
Valu
e of a
ngle
0
05
1
15
2
25
3Value variation of 1205933 in successive frames
Figure 6 The operator keeps his body still and only rotates his arm circularly constantly and with a low and smooth speed from the originposition to limiting position
Value variation of 1205935 in successive frames
Valu
e of a
ngle
0
05
1
15
2
25
3
50 100 150 200 2500Frames
Figure 7The operator keeps his body still and only rotates his elbow circularly constantly and with a low and smooth speed from the originposition to limiting position
Host computer LinuxROS
Joint point Cartesian positions
Joint angles and hand posture
UDP sending data
Joint angles and stiffness variations
Torque control
Visual feedback
Figure 8 The simulation experiment flow diagram
8 Discrete Dynamics in Nature and Society
Feedforward
Impedance
Robotdynamics
Plannedmovement
++
+
Actualmovement
P(k)
p p p
p pr pr
minus
Ff
Fb
Figure 9 Scheme of HRC control model The feedforward 119865119891
corresponds to the force of human and 119865119887is force feedback based
on PD impedance controller which is employed to regulate robotjoint or endpoint impedance
[54] demonstrated experimentally that the effect of stiffnessparameters is negligible Hence this model can be expressedas
119865119891= 119898 + 119888 (17)
where 119865119891is a force vector between the human and robot119898 is
a virtual mass parameter 119888 is a virtual damping parameterand are respectively the velocity and accelerationvectors which can be derived from (16)
The torque input to the slave arm is produced by PDcontroller defined below in (18) which also employs a gravitycompensator 119865
119892 Consider
119865119887= 119863119887Δ + 119870
119887Δ119883 + 119865
119892 (18)
where 119863119887 119870119887are slave arm endpoint damping and stiffness
respectively The stiffness 119870119887is set in real time according to
the estimated stiffness at endpoint of the human operatorrsquoslimb and119863
119887is set proportional to119870
119887with a fixed ratio to be
specified by the designerThe endpoint force 119865
119887in Cartesian space needs to be
transformed to joint space by (19) in order to be implementedon the robot arm joint torque controller Consider
120591 = 119869119879
119865119887 (19)
where 120591 denotes robot joint torques 119865119887denotes robot end-
point force in Cartesian space and 119869 represents robot armJacobian Therefore the stiffness in joint space of the slaverobot can be derived from the stiffness in Cartesian spaceaccording to
119870119902
119903asymp 119869119879
119870ℎ119869 (20)
where 119870119902119903denotes robot joint stiffness and 119870
ℎis human arm
endpoint stiffness The model (shown in Figure 9) of forceand impedance enables simulation of a movement of the armor leg along a planned trajectory 119902(119896) in an environmentcharacterized by force and impedance First the torque iscomputed using (19) and (18) then impedance is used tocompute the effect of the feedback control item on human-robot interactions
3 Experimental Setup
The experimental platform is a dual-arm Baxter robot whichconsists of a torso 2-degree-of-freedom (2-DOF) head dualarms with 7 DOFs integrated cameras sonar torque sensorsencoders and direct programming access via Robot Operat-ing System (ROS) interface Each joint of Baxter robot arm isdriven by 7 serial elastic actuators (SEA) with intrinsic safetyMoreover joint stiffness and damping can be modified underBaxter robot torque control mode which is simplified as PDimpedance control law in this paper
To verify the efficiency of proposed HRC methodhuman-robot telemanipulation for moving objects (shown inFigure 10) is implemented with comparative tests under twodifferent scenarios that is low stiffness mode and humanoperated mode The robot left arm serves as slave armwhich is guided by human operatorrsquos limb endpoint Thehuman left arm serves as master arm As for the Baxterrobot simulator setup first Baxter simulator is launchedaccording to Baxter robot wiki guideline [57] Then inserta book shelf from gazebo environment library and 4 brickswhich are configured as shown in Figure 10 Human operatormoves Baxter left arm via visual feedback and adapts armpose to move the bricks to enable Baxter robot to imitatehuman motor adaptive behaviours by means of UDP com-munications between host computer and Baxter simulator Inaddition Baxter robot initial stiffness is set with a small value(Left S0 30 Left S1 30 Left E0 30 Left E1 20 Left W0 20Left W1 15 Left W2 10 unit Nmsdotrad)
4 Results
As indicated in Section 3 the experiment is based on twoscenarios as shown in Figure 11 Baxter motion is regulatedby human operator in real time The human operatorrsquos armis simplified as 7-DOF manipulator corresponding to Baxterrobot joints Meanwhile human hand posture is captured byKinect to control Baxter robot stiffness adaptations whichvary according to time of posture maintenance
Test I Human operator teleoperates Baxter robot usingKinect which extracts humanmotion regulations in real timeFirst the human operator guides Baxter to the book shelf andmake a precise positioning and calibration by visual feedbackSecond humanoperator employs pose 1 shown in Figure 11(a)to move the object but the object does not move at allNaturally human operator changes his arm configuration topose 2 and moves the object again and still cannot movethe object As indicated in Figure 13 Baxter robot can adaptits stiffness using different pose as well however the initialstiffness set on Baxter robot is too small to move the objectwith two poses
Test II As shown in Figure 13(b) human operator interactswith Baxter robot with human motion intention detectionbased on Kinect Human operator hand gesture is employedto control Baxter robot stiffness variations as shown inFigure 12 Generally fist means human operator strengthensmuscles to increase force to fulfil a specific task Thumb-up
Discrete Dynamics in Nature and Society 9
Brick5kg
Figure 10 Experimental setup for human and Baxter robot collaboration intuitively and compliantly in teleoperation scenario The virtualBaxter robot environment is based on ROS and gazebo [58] Four bricks are put on the shelf and their total weights are modified to 5 kgBaxter robot is supposed to move the four bricks with different arm configurations
(a) Object moving with pose 1 (b) Object moving with pose 2
Figure 11 Scheme of Baxter robot moving an object by two different poses The red arrows denote the force directions of the two posesrespectively
t
Stiff
ness
inde
x
0
1
Figure 12 Baxter robot stiffness control by human hand gestures fist increasing stiffness with a threshold thumb-up holding currentstiffness and finger spread decreasing stiffness
10 Discrete Dynamics in Nature and Society
02
minus02
06
1
5
10
15
20
40
60
Endp
oint
stiff
ness
(Nm
)En
dpoi
nt d
ispla
cem
ent (
m)
Start Pose 1 Pose 2 End
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(a) Object moving test I
Endp
oint
stiff
ness
(Nm
)
02
minus02
06
1
Endp
oint
disp
lace
men
t (m
)
Pose 1 Pose 2
5
15
25
35
45
40
80
120
EndStart
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(b) Object moving test II
Figure 13 Object moving test results (a) object moving without human postural stiffness index transfer (b) object moving with humanpostural stiffness transfer Both the two tests are composed of four steps start to move Baxter robot endpoint to the target move objects usingpose 1 and move objects with pose 2 and finally finish moving objects The predominated Baxter robot joint S0 is selected to track the torquevariations during the tests
denotes that the Baxter robot stiffness is sufficient to completetasks for example moving objects in this test We utilisefinger spread pose to present that Baxter robot needs todecrease stiffness to return compliant In this way Baxter canunderstand human motion intention simply but stably andefficiently
In this test human operator replicates motion that hasbeen done in test I During the first pose inmoving the objectBaxter can not complete the task while human operatorincreases Baxter stiffness via hand gesture However Baxter
can not make it as well In the second pose in moving objecthuman uses the same way to control Baxter motion andstiffness as well and Baxter can finish the task easily Whenthe task is completed human operator spreads fingers tomake Baxter robot return compliant
5 Conclusion
In this paper we have developed a natural interface indiscrete-time for human-robot collaboration by making
Discrete Dynamics in Nature and Society 11
robot understand human motion intention especially forstiffness adaptation instead of using EMG signals which needto be detected by adhering electrodes on the skin In additionwe used a geometry vector approach to extract human arm7-DOF Jacobian for stiffness transformation from Cartesianspace to joint space in real time A biomimetic controller isemployed for human and robot motion regulation transferExperiment validated that the proposed approach to HRCwas intuitive compliant and efficient It may have additionalapplications in various HRC scenarios
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported in part by State Key Laboratoryof Robotics and System (HIT) Grant SKLRS-2014-MS-05SKLRS201405B National Natural Science Foundation ofChina (NSFC) Grant 61273339 Heilongjiang Provincial Nat-ural Science Foundation of China Grants QC2014C072 andF2015010 The authors would like to acknowledge supportfromMr Chao Wang in the experiment implementation
References
[1] S A GreenM Billinghurst X Chen and J G Chase ldquoHuman-robot collaboration a literature review and augmented realityapproach in designrdquo International Journal of Advanced RoboticSystems vol 5 no 1 pp 1ndash18 2008
[2] B Chandrasekaran and J M Conrad ldquoHuman-robot collabo-ration a surveyrdquo in Proceedings of the IEEE SoutheastCon 2015pp 1ndash8 April 2015
[3] J-M Lu and Y-L Hsu ldquoTelepresence robots for medicaland homecare applicationsrdquo in Contemporary Issues in SystemsScience and Engineering M Zhou H-X Li and M WeijnenEds chapter 21 pp 725ndash735 JohnWiley amp Sons Hoboken NJUSA 2015
[4] T Arai R Kato and M Fujita ldquoAssessment of operator stressinduced by robot collaboration in assemblyrdquo CIRP AnnalsmdashManufacturing Technology vol 59 no 1 pp 5ndash8 2010
[5] A Bechar and Y Edan ldquoHuman-robot collaboration forimproved target recognition of agricultural robotsrdquo IndustrialRobot vol 30 no 5 pp 432ndash436 2003
[6] Top 10 emerging technologies of 2015 httpsagendaweforumorg
[7] B Matthias S Kock H Jerregard M Kallman and I Lund-berg ldquoSafety of collaborative industrial robots certificationpossibilities for a collaborative assembly robot conceptrdquo inProceedings of the IEEE International Symposium on Assemblyand Manufacturing (ISAM rsquo11) pp 1ndash6 Tampere Finland May2011
[8] V Morabito ldquoBig data driven business modelsrdquo in Big Data andAnalytics pp 65ndash80 Springer 2015
[9] B Scassellati and K M Tsui ldquoCo-robots humans and robotsoperating as partnersrdquo in Handbook of Science and TechnologyConvergence pp 1ndash10 Springer 2015
[10] W He A O David Z Yin and C Sun ldquoNeural networkcontrol of a robotic manipulator with input deadzone and
output constraintrdquo IEEE Transactions on Systems Man andCybernetics Systems 2015
[11] W He Y Chen and Z Yin ldquoAdaptive neural network controlof an uncertain robot with full-state constraintsrdquo IEEE Transac-tions on Cybernetics vol 46 no 3 pp 620ndash629 2016
[12] C Reardon H Tan B Kannan and L DeRose ldquoTowardssafe robot-human collaboration systems using human posedetectionrdquo in Proceedings of the IEEE International Conferenceon Technologies for Practical robot Applications (TePRA rsquo15) pp1ndash6 Woburn Mass USA May 2015
[13] W He Y Dong and C Sun ldquoAdaptive neural impedancecontrol of a robotic manipulator with input saturationrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 46no 3 pp 334ndash344 2016
[14] K Kronander and A Billard ldquoLearning compliant manipula-tion through kinesthetic and tactile human-robot interactionrdquoIEEE Transactions on Haptics vol 7 no 3 pp 367ndash380 2014
[15] L Peternel T Petric E Oztop and J Babic ldquoTeaching robots tocooperate with humans in dynamic manipulation tasks basedon multi-modal human-in-the-loop approachrdquo AutonomousRobots vol 36 no 1-2 pp 123ndash136 2014
[16] L D Rozo S Calinon D Caldwell P Jimenez and C TorrasldquoLearning collaborative impedance-based robot behaviorsrdquo inProceedings of the 27th AAAI Conference on Artificial Intelli-gence Bellevue Wash USA July 2013
[17] Kuka lbr robot profile March 2015 httpwwwkuka-roboticscomenproductsindustrial robotssensitiv
[18] Barrett wam arm profile 2015 httpwwwbarrettcomrobotproducts-armhtm
[19] A Jafari N G Tsagarakis and D G Caldwell ldquoAwAS-II a newactuator with adjustable stiffness based on the novel principle ofadaptable pivot point and variable lever ratiordquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo11) pp 4638ndash4643 Shanghai China May 2011
[20] M Grebenstein A Albu-Schaffer T Bahls et al ldquoThe DLRhand arm systemrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 3175ndash3182 Shanghai China May 2011
[21] S P Chan and H C Liaw ldquoGeneralized impedance controlof robot for assembly tasks requiring compliant manipulationrdquoIEEE Transactions on Industrial Electronics vol 43 no 4 pp453ndash461 1996
[22] J Buchli F Stulp E Theodorou and S Schaal ldquoLearningvariable impedance controlrdquo International Journal of RoboticsResearch vol 30 no 7 pp 820ndash833 2011
[23] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 Phuket Thailand December 2011
[24] A Ajoudani M Gabiccini N Tsagarakis A Albu-Schafferand A Bicchi ldquoTeleImpedance Exploring the role of common-mode and configuration- dependant stiffnessrdquo in Proceedingsof the 12th IEEE-RAS International Conference on HumanoidRobots Humanoids 2012 pp 363ndash369 Osaka Japan December2012
[25] N Hogan ldquoImpedance control an approach to manipulationpart IImdashimplementationrdquo Journal of Dynamic Systems Mea-surement and Control vol 107 no 1 pp 8ndash16 1985
[26] A Ajoudani N Tsagarakis and A Bicchi ldquoTele-impedanceteleoperation with impedance regulation using a body-machine
12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 3
Arm joint state
Robot dynamics
Stiffness index
Biomimeticcontroller
Jacobian
minus
+
Robot joint state
Figure 2 Profile of HRC in discrete-time Human arm endpoint stiffness forward kinematic and postural stiffness are estimated in discrete-time and transfer to Baxter robot via biomimetic controller
eliminate signal drift and the residual errors In Section 2methods are depicted for human arm postural stiffnessestimation and motion extraction as well as discrete-timebiomimetic controller design In Section 3 experimentalsetup is presented Results are revealed in Section 4 followedby conclusion in Section 5
2 Methods
21 Human Arm Postural Stiffness Modelling Relevant re-search work indicates that limb impedance represents human
skill performance [49] Therefore extraction of impedanceregulations from human is a potential way to transfer humanexperienced skills to robots compared to conventional math-ematical modelling Generally human upper limb endpointstiffness is mainly determined by muscle cocontraction andgeometry poseThis means we can adapt our arm stiffness bymuscle cocontraction as well as arm pose change while inthis paper we mainly investigate the effect of arm pose oninteracting with external forces According to [50] humanendpoint stiffness in Cartesian space can be denoted bymuscle stiffness and postural stiffness in
119870119888(119894) =
119869+119879
ℎ(119902(119894minus1)
) 119870119869(119894) minus
[119869+119879
ℎ(119902(119894)) minus 119869+119879
ℎ(119902(119894minus1)
)] 119891ex(119894)
119902(119894)minus 119902(119894minus1)
119869+119879
ℎ(119902(119894)) + 120590 (119894) if 119902
(119894)= 119902(119894minus1)
119870119888(119894 minus 1) if 119902
(119894)= 119902(119894minus1)
(1)
119894 is time constant 119902 isin 1198777 is a vector of 7 joint angles of arm119869ℎ(119902) isin 119877
6times7 is arm Jacobianmatrix119870119888isin 1198776times6 is the endpoint
orCartesian stiffness119870119869isin 1198777times7 is joint stiffness and119891ex isin 119877
6
is the external force applied to endpoint Obviously humanendpoint stiffness mainly depends on Jacobian (posture)joint stiffness gravity and motion The arm joint angles 119902of human will be estimated by Kinect consequently theJacobian matrix 119869(119902) can be calculated using human armjoint angles and skeleton link length According to [51 52]we assume that joint stiffness 119870
119869can be represented as
multiplication of an intrinsic constant stiffness 120582 so 119870119869= 120582
120590(119894 minus 1) is the gravity contribution to the human endpointstiffness
119870119888(119894) = 119869
+119879
ℎ(119902(119894minus1)
) 120582119869+119879
ℎ(119902(119894minus1)
) + 120590 (119894 minus 1)
120582 = 119875 (119894 minus 1) 120576 (119894 minus 1)
(2)
where 120582 isin 1198777times7 and 120576 isin 119877
7times7 are stiffness coefficientsrespectively Here the stiffness index 120582 can be adaptedaccording to different scenarios In this paper we employhand posture 119875 in discrete-time to indicate 120582 variationsFor example fist usually suggests that humans increase armstiffness to keep arm stable against external disturbance oroutput strong force Thus we can employ hand gesture tocontrol robot stiffness index based on empirically identifiedhuman arm stiffness
22 Human Arm Jacobian Estimation Figure 3 shows thereference and link coordinate systems of the 7-DOF humanarm using Denavit-Hartenberg (D-H) method The D-Hparameters of the kinematic model of the human arm arelisted in Table 1 where 119889
3 1198895 and 119897
7are the lengths of upper
arm forearm and palm respectively According to the D-H
4 Discrete Dynamics in Nature and Society
Shoulder Elbow Wrist
Base
Hand
C DE F
x1x0
x2
x3
x4
z0
z1
z2
z3
z4
z5
z6z7
d3 d5 l7
x5
x6
x7
y7
Figure 3 Human arm model and its primary D-H coordinate system and the initial position of each joint angle
Table 1 D-H parameters of the human arm
Joint 120579119894
119889119894
119897119894
120572119894
1 1199021(0∘) 0 0 90
∘
2 1199022(90∘) 0 0 90
∘
3 1199023(minus90∘) 119889
30 90
∘
4 1199024(180∘) 0 0 90
∘
5 1199025(90∘) 119889
50 90
∘
6 1199026(minus90∘) 0 0 90
∘
7 1199027(180∘) 0 119897
70∘
method the description of the coordination transformationfrom frame 119894 to frame 119894 minus 1 is shown in
119894minus1
119879119894
=
[[[[[
[
cos 120579119894minus cos120572
119894sin 120579119894
sin120572119894sin 120579119894119897119894cos 120579119894
sin 120579119894
cos120572119894cos 120579119894minus sin120572
119894cos 120579119894119897119894sin 120579119894
0 sin120572119894
cos120572119894
119889119894
0 0 0 1
]]]]]
]
(3)
Human arm Jacobian matrix 119869ℎ(119902) is related to each angle of
human arm joints and is shown in
119879
119869ℎ(119902) = [
119879
1198691
119879
1198692
119879
1198693
119879
1198694
119879
1198695
119879
1198696
119879
1198697] (4)
where 119879119869119894can be calculated from (5) and (6) and 119894119879
7is the
coordination transformation from frame 119894 to the end-effectorframe and it can be deviated from (7) Consider
119879
119869119894=
[[[[[[[[[[[
[
minus119899119909119901119910+ 119899119910119901119909
minus119900119909119901119910+ 119900119910119901119909
minus119886119909119901119910+ 119886119910119901119909
119899119911
119900119911
119886119911
]]]]]]]]]]]
]
(5)
119894
1198797=
[[[[[
[
119899119909119900119909119886119909119901119909
119899119910119900119910119886119910119901119910
119899119911119900119911119886119911119901119911
0 0 0 1
]]]]]
]
(6)
119894
1198797=119894
119879119894+1sdot119894+1
119879119894+2sdot sdot sdot sdot sdot6
1198797 (7)
Now the problem of getting Jacobian matrix is equalto calculating all of the 7 joint angles By using Kinectsensor we can have the skeleton data of human body directlywhich include 25 joints 3D positions relative to the cameracoordinate as shown in the left of Figure 4 Then thegeometrymodel of human left arm is built as seen in the rightof Figure 4 we take the point HipLeft as the origin of the basecoordinate while119909-axis is in the same direction of vector997888997888rarr119860119874And119910-axis is alongwith vector997888997888rarr119874119862 It is easy to get the normalvector of each axis of the base coordinate997888rarr119883
0997888rarr1198840 and
997888rarr1198850(note
that 997888rarr119883119894is the normal vector of 119909-axis in coordinate 119894)
997888rarr1198830=
997888997888rarr119860119874
100381610038161003816100381610038161003816
997888997888rarr119860119874
100381610038161003816100381610038161003816
997888rarr1198840=
997888997888rarr119874119862
100381610038161003816100381610038161003816
997888997888rarr119874119862
100381610038161003816100381610038161003816
997888rarr1198850=997888rarr1198830times997888rarr1198840
(8)
In order to calculate all of the joint angles correctly twoconditions should exist (i) human should stand straight andkeep the body vertical to the ground as far as possible and(ii) the thumb must be in the same plane with the palmduring their motion because we need the plane consistingof points of thumb wrist and hand to calculate some otherjoint angles These seven angles are all in the joint space andtheir initial positions are displayed in Figure 3The geometryvectormethodweproposed is based on the principle of cosinevalue of two vectors shown in (9) What is more the anglebetween two planes can be got by using their normal vector
Discrete Dynamics in Nature and Society 5
OA
B C
D
E
F
GH
HipLeft
ShoulderLeft
ShoulderRight
HipRight
ElbowLeft
WristLeft
HandLeft
ThumbLeftHandTipLeft
I
J
1205931
12059321205933
1205934
x
z
y 1205935
1205937
D998400
Figure 4 Body skeleton map consisting of 25 joints captured by Kinect and Human arm motion model in joint space
As we all know the scope of the angle between two anglesis from 0 to 120587 thus this should be taken into considerationupon solving the 7 joint angles
cos⟨997888rarr1198811997888rarr1198812⟩ =
997888rarr1198811sdot997888rarr1198812
100381610038161003816100381610038161003816
997888rarr1198811
100381610038161003816100381610038161003816
100381610038161003816100381610038161003816
997888rarr1198812
100381610038161003816100381610038161003816
(9)
As shown in Figure 4 1205931is the shoulder yaw angle It is
simple to find that 1205931is the supplement of the angle between
planes COD and 119909119874119910 1205932is the shoulder pitch angle so it is
the angle between 119910-axis and vector 997888997888rarr119862119863 1205933and 120593
5are the
angles of shoulder roll and elbow roll upon considering theorigin position which is showed in Figure 3 120593
3can be seen
as the angle of planes COD and CDE Upon using the samemethod of solving120593
31205935can be regarded as the angle between
planeCDE and planeDEH 1205934is the angle between upper and
lower arm and it is the angle between vectors 997888997888rarr119863119862 and 997888997888rarr119863119864 1205936
is the angle of lower arm and hand so it is equal to the anglebetween vector 997888997888rarr119864119863 and plane EFH
But computing 1205937 the yaw angle of wrist is challenge
work but here 1205937can be viewed as the angle between 997888rarr119883
5and
997888rarr1198847 where
997888rarr1198847=997888rarr1198857times997888rarr1198837
997888rarr1198837=
997888rarr119864119865
100381610038161003816100381610038161003816
997888rarr119864119865100381610038161003816100381610038161003816
997888rarr1198857=
997888997888rarr119864119867 times
997888rarr119864119865
100381610038161003816100381610038161003816
997888997888rarr119864119867 times
997888rarr119864119865100381610038161003816100381610038161003816
(10)
So now the problem becomes solving 997888rarr1198835 We know that 997888rarr119883
5
must be in the plane ofEFH what ismore997888rarr1198835is perpendicular
to 997888997888rarr119863119864 Thus we suppose that997888rarr1198835= 1198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867 (11)
There are
(1198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867) sdot
997888997888rarr119863119864 = 0
1003816100381610038161003816100381610038161198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867
100381610038161003816100381610038161003816= 1
(12)
Therefore
1205937= ⟨
997888rarr1198835997888rarr1198837⟩ (13)
Up to now all of the 7 joint angles are calculatedThoughthe geometry vector approach we used can meet the demandof most cases there are still some situations where it cannot work well for example the plane consisting of pointsShoulderLeft ElbowLfet and WristLeft does not exist
Then two kinds of experiments have been implementedto verify the performance of the approach The experimentenvironment is an indoor and adequate illumination envi-ronment Only one person stands forward to Kinect in thedistance about 2 meters The first one is the static positionexperiment shown in Figure 5 There is no doubt aboutobversing that the curves of 120593
1 1205932 1205933 1205934 1205936 and 120593
7are in an
accurate and correct variation They are smoothing and thefluctuation is so tiny that can be ignored But the fluctuationof 1205935is obvious The reason is that in this situation the
plane CDE consisting of points ShoulderLeft ElbowLeft andWristLeft is not stable because the positions captured byKinect of these three points are almost collinear therefore thenormal vector of the plane will jitter in the precision scope ofthe sensor Although there are indeed some fluctuations of
6 Discrete Dynamics in Nature and Society
Value of seven angles at initial position
Valu
e of a
ngle
s
0
05
1
15
2
25
3
35
50 100 150 200 250 3000Frames
120593112059321205933
120593512059361205937
1205934
Figure 5The initial positions of all joint angles Operator stands statically in front of Kinect and keeps his upper and lower arm in a line andhorizontal just as showed in the left picture The right picture presents the variation of 7 joint angles in successive frames
the curves their overall trends are correct and acceptablewhich demonstrates that the approach to get the values ofthese 7 joint angles works well in static action situation
Figures 6 and 7 are the two dynamic actions which repre-sent the variation of the upper arm and forearm respectivelynamely the joint angles 120593
3and 120593
5 It is evident to find
that angles 1205933and 120593
5have a periodic and regular variation
with the rotation of upper and lower arm from Figures 6and 7 These trajectories are consistent with the expectationindicating that our method is in good performance
In the end a simulation experiment was carried out toillustrate the real time performance of our approach in realenvironment The simulation platform used in this paper isBaxter robot model Baxter robot has two anthropomorphicarms that are all with 7 DOFs The experiment flow diagramcan be seen in Figure 8 From the results of this experimentwe observed that all of these 7 angles of the robot armswere changed smoothly along with variation of the operatorrsquosarm and the motions of both are similar but not identicalbecause of the different size of them which shows thatthe approach we proposed is feasible and effective On theother hand through the coordinate transformation betweenhuman coordinate and Baxter coordinate and the trial datawe can get the transformation matrix 119879 and offset matrix 119861from human coordinate system to robot coordinate That is
120579Robot = 119879120579Human + 119861 (14)
where
119879 =
[[[[[[[[[[[[[[
[
1 0 0 0 0 0 0
0 minus1 0 0 0 0 0
0 0 1 0 0 0 0
0 0 0 minus1 0 0 0
0 0 0 0 1 0 0
0 0 0 0 0 1 0
0 0 0 0 0 0 1
]]]]]]]]]]]]]]
]
119861 =
[[[[[[[[[[[[[[
[
minus246
120587
2
minus120587
120587
minus089
minus120587
0
]]]]]]]]]]]]]]
]
(15)
23 Discrete-Time Biomimetic Controller In this section adiscrete-time biomimetic controller with visual feedback ispresented for human and robot interaction Flash and Hogan[53] conducted several experiments aiming atmathematicallyrepresenting the kinematic part of the model They foundthat for a movement starting and ending with zero velocity(to and from end positions) the velocity profile of the handin a Cartesian coordinate system typically followed a bellcurve distributionThis velocity curve once integrated givesthe general kinematic representation of the trajectory of thehuman hand during a typical pushing task This relation isgiven by
119901 (119896) = 1198750+ Δ119875 (6119896
5
minus 151198964
+ 101198963
)
0 le 119896 =119905119894
119879le 1
(16)
where Δ119875 is the displacement performed in the trajectory 119896is the time constant 119875
0is the initial position vector and 119879 is
the total time required to perform the trajectoryPrevious researches [54ndash56] demonstrated the capability
of impedance control to be used as a reactive model to followthis kinematic model for human-robot collaboration (HRC)Three impedance parameters can be applied to this modelnamely mass damping and stiffness Kosuge and Kazamura
Discrete Dynamics in Nature and Society 7
50 100 150 200 250 3000Frames
Valu
e of a
ngle
0
05
1
15
2
25
3Value variation of 1205933 in successive frames
Figure 6 The operator keeps his body still and only rotates his arm circularly constantly and with a low and smooth speed from the originposition to limiting position
Value variation of 1205935 in successive frames
Valu
e of a
ngle
0
05
1
15
2
25
3
50 100 150 200 2500Frames
Figure 7The operator keeps his body still and only rotates his elbow circularly constantly and with a low and smooth speed from the originposition to limiting position
Host computer LinuxROS
Joint point Cartesian positions
Joint angles and hand posture
UDP sending data
Joint angles and stiffness variations
Torque control
Visual feedback
Figure 8 The simulation experiment flow diagram
8 Discrete Dynamics in Nature and Society
Feedforward
Impedance
Robotdynamics
Plannedmovement
++
+
Actualmovement
P(k)
p p p
p pr pr
minus
Ff
Fb
Figure 9 Scheme of HRC control model The feedforward 119865119891
corresponds to the force of human and 119865119887is force feedback based
on PD impedance controller which is employed to regulate robotjoint or endpoint impedance
[54] demonstrated experimentally that the effect of stiffnessparameters is negligible Hence this model can be expressedas
119865119891= 119898 + 119888 (17)
where 119865119891is a force vector between the human and robot119898 is
a virtual mass parameter 119888 is a virtual damping parameterand are respectively the velocity and accelerationvectors which can be derived from (16)
The torque input to the slave arm is produced by PDcontroller defined below in (18) which also employs a gravitycompensator 119865
119892 Consider
119865119887= 119863119887Δ + 119870
119887Δ119883 + 119865
119892 (18)
where 119863119887 119870119887are slave arm endpoint damping and stiffness
respectively The stiffness 119870119887is set in real time according to
the estimated stiffness at endpoint of the human operatorrsquoslimb and119863
119887is set proportional to119870
119887with a fixed ratio to be
specified by the designerThe endpoint force 119865
119887in Cartesian space needs to be
transformed to joint space by (19) in order to be implementedon the robot arm joint torque controller Consider
120591 = 119869119879
119865119887 (19)
where 120591 denotes robot joint torques 119865119887denotes robot end-
point force in Cartesian space and 119869 represents robot armJacobian Therefore the stiffness in joint space of the slaverobot can be derived from the stiffness in Cartesian spaceaccording to
119870119902
119903asymp 119869119879
119870ℎ119869 (20)
where 119870119902119903denotes robot joint stiffness and 119870
ℎis human arm
endpoint stiffness The model (shown in Figure 9) of forceand impedance enables simulation of a movement of the armor leg along a planned trajectory 119902(119896) in an environmentcharacterized by force and impedance First the torque iscomputed using (19) and (18) then impedance is used tocompute the effect of the feedback control item on human-robot interactions
3 Experimental Setup
The experimental platform is a dual-arm Baxter robot whichconsists of a torso 2-degree-of-freedom (2-DOF) head dualarms with 7 DOFs integrated cameras sonar torque sensorsencoders and direct programming access via Robot Operat-ing System (ROS) interface Each joint of Baxter robot arm isdriven by 7 serial elastic actuators (SEA) with intrinsic safetyMoreover joint stiffness and damping can be modified underBaxter robot torque control mode which is simplified as PDimpedance control law in this paper
To verify the efficiency of proposed HRC methodhuman-robot telemanipulation for moving objects (shown inFigure 10) is implemented with comparative tests under twodifferent scenarios that is low stiffness mode and humanoperated mode The robot left arm serves as slave armwhich is guided by human operatorrsquos limb endpoint Thehuman left arm serves as master arm As for the Baxterrobot simulator setup first Baxter simulator is launchedaccording to Baxter robot wiki guideline [57] Then inserta book shelf from gazebo environment library and 4 brickswhich are configured as shown in Figure 10 Human operatormoves Baxter left arm via visual feedback and adapts armpose to move the bricks to enable Baxter robot to imitatehuman motor adaptive behaviours by means of UDP com-munications between host computer and Baxter simulator Inaddition Baxter robot initial stiffness is set with a small value(Left S0 30 Left S1 30 Left E0 30 Left E1 20 Left W0 20Left W1 15 Left W2 10 unit Nmsdotrad)
4 Results
As indicated in Section 3 the experiment is based on twoscenarios as shown in Figure 11 Baxter motion is regulatedby human operator in real time The human operatorrsquos armis simplified as 7-DOF manipulator corresponding to Baxterrobot joints Meanwhile human hand posture is captured byKinect to control Baxter robot stiffness adaptations whichvary according to time of posture maintenance
Test I Human operator teleoperates Baxter robot usingKinect which extracts humanmotion regulations in real timeFirst the human operator guides Baxter to the book shelf andmake a precise positioning and calibration by visual feedbackSecond humanoperator employs pose 1 shown in Figure 11(a)to move the object but the object does not move at allNaturally human operator changes his arm configuration topose 2 and moves the object again and still cannot movethe object As indicated in Figure 13 Baxter robot can adaptits stiffness using different pose as well however the initialstiffness set on Baxter robot is too small to move the objectwith two poses
Test II As shown in Figure 13(b) human operator interactswith Baxter robot with human motion intention detectionbased on Kinect Human operator hand gesture is employedto control Baxter robot stiffness variations as shown inFigure 12 Generally fist means human operator strengthensmuscles to increase force to fulfil a specific task Thumb-up
Discrete Dynamics in Nature and Society 9
Brick5kg
Figure 10 Experimental setup for human and Baxter robot collaboration intuitively and compliantly in teleoperation scenario The virtualBaxter robot environment is based on ROS and gazebo [58] Four bricks are put on the shelf and their total weights are modified to 5 kgBaxter robot is supposed to move the four bricks with different arm configurations
(a) Object moving with pose 1 (b) Object moving with pose 2
Figure 11 Scheme of Baxter robot moving an object by two different poses The red arrows denote the force directions of the two posesrespectively
t
Stiff
ness
inde
x
0
1
Figure 12 Baxter robot stiffness control by human hand gestures fist increasing stiffness with a threshold thumb-up holding currentstiffness and finger spread decreasing stiffness
10 Discrete Dynamics in Nature and Society
02
minus02
06
1
5
10
15
20
40
60
Endp
oint
stiff
ness
(Nm
)En
dpoi
nt d
ispla
cem
ent (
m)
Start Pose 1 Pose 2 End
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(a) Object moving test I
Endp
oint
stiff
ness
(Nm
)
02
minus02
06
1
Endp
oint
disp
lace
men
t (m
)
Pose 1 Pose 2
5
15
25
35
45
40
80
120
EndStart
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(b) Object moving test II
Figure 13 Object moving test results (a) object moving without human postural stiffness index transfer (b) object moving with humanpostural stiffness transfer Both the two tests are composed of four steps start to move Baxter robot endpoint to the target move objects usingpose 1 and move objects with pose 2 and finally finish moving objects The predominated Baxter robot joint S0 is selected to track the torquevariations during the tests
denotes that the Baxter robot stiffness is sufficient to completetasks for example moving objects in this test We utilisefinger spread pose to present that Baxter robot needs todecrease stiffness to return compliant In this way Baxter canunderstand human motion intention simply but stably andefficiently
In this test human operator replicates motion that hasbeen done in test I During the first pose inmoving the objectBaxter can not complete the task while human operatorincreases Baxter stiffness via hand gesture However Baxter
can not make it as well In the second pose in moving objecthuman uses the same way to control Baxter motion andstiffness as well and Baxter can finish the task easily Whenthe task is completed human operator spreads fingers tomake Baxter robot return compliant
5 Conclusion
In this paper we have developed a natural interface indiscrete-time for human-robot collaboration by making
Discrete Dynamics in Nature and Society 11
robot understand human motion intention especially forstiffness adaptation instead of using EMG signals which needto be detected by adhering electrodes on the skin In additionwe used a geometry vector approach to extract human arm7-DOF Jacobian for stiffness transformation from Cartesianspace to joint space in real time A biomimetic controller isemployed for human and robot motion regulation transferExperiment validated that the proposed approach to HRCwas intuitive compliant and efficient It may have additionalapplications in various HRC scenarios
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported in part by State Key Laboratoryof Robotics and System (HIT) Grant SKLRS-2014-MS-05SKLRS201405B National Natural Science Foundation ofChina (NSFC) Grant 61273339 Heilongjiang Provincial Nat-ural Science Foundation of China Grants QC2014C072 andF2015010 The authors would like to acknowledge supportfromMr Chao Wang in the experiment implementation
References
[1] S A GreenM Billinghurst X Chen and J G Chase ldquoHuman-robot collaboration a literature review and augmented realityapproach in designrdquo International Journal of Advanced RoboticSystems vol 5 no 1 pp 1ndash18 2008
[2] B Chandrasekaran and J M Conrad ldquoHuman-robot collabo-ration a surveyrdquo in Proceedings of the IEEE SoutheastCon 2015pp 1ndash8 April 2015
[3] J-M Lu and Y-L Hsu ldquoTelepresence robots for medicaland homecare applicationsrdquo in Contemporary Issues in SystemsScience and Engineering M Zhou H-X Li and M WeijnenEds chapter 21 pp 725ndash735 JohnWiley amp Sons Hoboken NJUSA 2015
[4] T Arai R Kato and M Fujita ldquoAssessment of operator stressinduced by robot collaboration in assemblyrdquo CIRP AnnalsmdashManufacturing Technology vol 59 no 1 pp 5ndash8 2010
[5] A Bechar and Y Edan ldquoHuman-robot collaboration forimproved target recognition of agricultural robotsrdquo IndustrialRobot vol 30 no 5 pp 432ndash436 2003
[6] Top 10 emerging technologies of 2015 httpsagendaweforumorg
[7] B Matthias S Kock H Jerregard M Kallman and I Lund-berg ldquoSafety of collaborative industrial robots certificationpossibilities for a collaborative assembly robot conceptrdquo inProceedings of the IEEE International Symposium on Assemblyand Manufacturing (ISAM rsquo11) pp 1ndash6 Tampere Finland May2011
[8] V Morabito ldquoBig data driven business modelsrdquo in Big Data andAnalytics pp 65ndash80 Springer 2015
[9] B Scassellati and K M Tsui ldquoCo-robots humans and robotsoperating as partnersrdquo in Handbook of Science and TechnologyConvergence pp 1ndash10 Springer 2015
[10] W He A O David Z Yin and C Sun ldquoNeural networkcontrol of a robotic manipulator with input deadzone and
output constraintrdquo IEEE Transactions on Systems Man andCybernetics Systems 2015
[11] W He Y Chen and Z Yin ldquoAdaptive neural network controlof an uncertain robot with full-state constraintsrdquo IEEE Transac-tions on Cybernetics vol 46 no 3 pp 620ndash629 2016
[12] C Reardon H Tan B Kannan and L DeRose ldquoTowardssafe robot-human collaboration systems using human posedetectionrdquo in Proceedings of the IEEE International Conferenceon Technologies for Practical robot Applications (TePRA rsquo15) pp1ndash6 Woburn Mass USA May 2015
[13] W He Y Dong and C Sun ldquoAdaptive neural impedancecontrol of a robotic manipulator with input saturationrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 46no 3 pp 334ndash344 2016
[14] K Kronander and A Billard ldquoLearning compliant manipula-tion through kinesthetic and tactile human-robot interactionrdquoIEEE Transactions on Haptics vol 7 no 3 pp 367ndash380 2014
[15] L Peternel T Petric E Oztop and J Babic ldquoTeaching robots tocooperate with humans in dynamic manipulation tasks basedon multi-modal human-in-the-loop approachrdquo AutonomousRobots vol 36 no 1-2 pp 123ndash136 2014
[16] L D Rozo S Calinon D Caldwell P Jimenez and C TorrasldquoLearning collaborative impedance-based robot behaviorsrdquo inProceedings of the 27th AAAI Conference on Artificial Intelli-gence Bellevue Wash USA July 2013
[17] Kuka lbr robot profile March 2015 httpwwwkuka-roboticscomenproductsindustrial robotssensitiv
[18] Barrett wam arm profile 2015 httpwwwbarrettcomrobotproducts-armhtm
[19] A Jafari N G Tsagarakis and D G Caldwell ldquoAwAS-II a newactuator with adjustable stiffness based on the novel principle ofadaptable pivot point and variable lever ratiordquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo11) pp 4638ndash4643 Shanghai China May 2011
[20] M Grebenstein A Albu-Schaffer T Bahls et al ldquoThe DLRhand arm systemrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 3175ndash3182 Shanghai China May 2011
[21] S P Chan and H C Liaw ldquoGeneralized impedance controlof robot for assembly tasks requiring compliant manipulationrdquoIEEE Transactions on Industrial Electronics vol 43 no 4 pp453ndash461 1996
[22] J Buchli F Stulp E Theodorou and S Schaal ldquoLearningvariable impedance controlrdquo International Journal of RoboticsResearch vol 30 no 7 pp 820ndash833 2011
[23] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 Phuket Thailand December 2011
[24] A Ajoudani M Gabiccini N Tsagarakis A Albu-Schafferand A Bicchi ldquoTeleImpedance Exploring the role of common-mode and configuration- dependant stiffnessrdquo in Proceedingsof the 12th IEEE-RAS International Conference on HumanoidRobots Humanoids 2012 pp 363ndash369 Osaka Japan December2012
[25] N Hogan ldquoImpedance control an approach to manipulationpart IImdashimplementationrdquo Journal of Dynamic Systems Mea-surement and Control vol 107 no 1 pp 8ndash16 1985
[26] A Ajoudani N Tsagarakis and A Bicchi ldquoTele-impedanceteleoperation with impedance regulation using a body-machine
12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Discrete Dynamics in Nature and Society
Shoulder Elbow Wrist
Base
Hand
C DE F
x1x0
x2
x3
x4
z0
z1
z2
z3
z4
z5
z6z7
d3 d5 l7
x5
x6
x7
y7
Figure 3 Human arm model and its primary D-H coordinate system and the initial position of each joint angle
Table 1 D-H parameters of the human arm
Joint 120579119894
119889119894
119897119894
120572119894
1 1199021(0∘) 0 0 90
∘
2 1199022(90∘) 0 0 90
∘
3 1199023(minus90∘) 119889
30 90
∘
4 1199024(180∘) 0 0 90
∘
5 1199025(90∘) 119889
50 90
∘
6 1199026(minus90∘) 0 0 90
∘
7 1199027(180∘) 0 119897
70∘
method the description of the coordination transformationfrom frame 119894 to frame 119894 minus 1 is shown in
119894minus1
119879119894
=
[[[[[
[
cos 120579119894minus cos120572
119894sin 120579119894
sin120572119894sin 120579119894119897119894cos 120579119894
sin 120579119894
cos120572119894cos 120579119894minus sin120572
119894cos 120579119894119897119894sin 120579119894
0 sin120572119894
cos120572119894
119889119894
0 0 0 1
]]]]]
]
(3)
Human arm Jacobian matrix 119869ℎ(119902) is related to each angle of
human arm joints and is shown in
119879
119869ℎ(119902) = [
119879
1198691
119879
1198692
119879
1198693
119879
1198694
119879
1198695
119879
1198696
119879
1198697] (4)
where 119879119869119894can be calculated from (5) and (6) and 119894119879
7is the
coordination transformation from frame 119894 to the end-effectorframe and it can be deviated from (7) Consider
119879
119869119894=
[[[[[[[[[[[
[
minus119899119909119901119910+ 119899119910119901119909
minus119900119909119901119910+ 119900119910119901119909
minus119886119909119901119910+ 119886119910119901119909
119899119911
119900119911
119886119911
]]]]]]]]]]]
]
(5)
119894
1198797=
[[[[[
[
119899119909119900119909119886119909119901119909
119899119910119900119910119886119910119901119910
119899119911119900119911119886119911119901119911
0 0 0 1
]]]]]
]
(6)
119894
1198797=119894
119879119894+1sdot119894+1
119879119894+2sdot sdot sdot sdot sdot6
1198797 (7)
Now the problem of getting Jacobian matrix is equalto calculating all of the 7 joint angles By using Kinectsensor we can have the skeleton data of human body directlywhich include 25 joints 3D positions relative to the cameracoordinate as shown in the left of Figure 4 Then thegeometrymodel of human left arm is built as seen in the rightof Figure 4 we take the point HipLeft as the origin of the basecoordinate while119909-axis is in the same direction of vector997888997888rarr119860119874And119910-axis is alongwith vector997888997888rarr119874119862 It is easy to get the normalvector of each axis of the base coordinate997888rarr119883
0997888rarr1198840 and
997888rarr1198850(note
that 997888rarr119883119894is the normal vector of 119909-axis in coordinate 119894)
997888rarr1198830=
997888997888rarr119860119874
100381610038161003816100381610038161003816
997888997888rarr119860119874
100381610038161003816100381610038161003816
997888rarr1198840=
997888997888rarr119874119862
100381610038161003816100381610038161003816
997888997888rarr119874119862
100381610038161003816100381610038161003816
997888rarr1198850=997888rarr1198830times997888rarr1198840
(8)
In order to calculate all of the joint angles correctly twoconditions should exist (i) human should stand straight andkeep the body vertical to the ground as far as possible and(ii) the thumb must be in the same plane with the palmduring their motion because we need the plane consistingof points of thumb wrist and hand to calculate some otherjoint angles These seven angles are all in the joint space andtheir initial positions are displayed in Figure 3The geometryvectormethodweproposed is based on the principle of cosinevalue of two vectors shown in (9) What is more the anglebetween two planes can be got by using their normal vector
Discrete Dynamics in Nature and Society 5
OA
B C
D
E
F
GH
HipLeft
ShoulderLeft
ShoulderRight
HipRight
ElbowLeft
WristLeft
HandLeft
ThumbLeftHandTipLeft
I
J
1205931
12059321205933
1205934
x
z
y 1205935
1205937
D998400
Figure 4 Body skeleton map consisting of 25 joints captured by Kinect and Human arm motion model in joint space
As we all know the scope of the angle between two anglesis from 0 to 120587 thus this should be taken into considerationupon solving the 7 joint angles
cos⟨997888rarr1198811997888rarr1198812⟩ =
997888rarr1198811sdot997888rarr1198812
100381610038161003816100381610038161003816
997888rarr1198811
100381610038161003816100381610038161003816
100381610038161003816100381610038161003816
997888rarr1198812
100381610038161003816100381610038161003816
(9)
As shown in Figure 4 1205931is the shoulder yaw angle It is
simple to find that 1205931is the supplement of the angle between
planes COD and 119909119874119910 1205932is the shoulder pitch angle so it is
the angle between 119910-axis and vector 997888997888rarr119862119863 1205933and 120593
5are the
angles of shoulder roll and elbow roll upon considering theorigin position which is showed in Figure 3 120593
3can be seen
as the angle of planes COD and CDE Upon using the samemethod of solving120593
31205935can be regarded as the angle between
planeCDE and planeDEH 1205934is the angle between upper and
lower arm and it is the angle between vectors 997888997888rarr119863119862 and 997888997888rarr119863119864 1205936
is the angle of lower arm and hand so it is equal to the anglebetween vector 997888997888rarr119864119863 and plane EFH
But computing 1205937 the yaw angle of wrist is challenge
work but here 1205937can be viewed as the angle between 997888rarr119883
5and
997888rarr1198847 where
997888rarr1198847=997888rarr1198857times997888rarr1198837
997888rarr1198837=
997888rarr119864119865
100381610038161003816100381610038161003816
997888rarr119864119865100381610038161003816100381610038161003816
997888rarr1198857=
997888997888rarr119864119867 times
997888rarr119864119865
100381610038161003816100381610038161003816
997888997888rarr119864119867 times
997888rarr119864119865100381610038161003816100381610038161003816
(10)
So now the problem becomes solving 997888rarr1198835 We know that 997888rarr119883
5
must be in the plane ofEFH what ismore997888rarr1198835is perpendicular
to 997888997888rarr119863119864 Thus we suppose that997888rarr1198835= 1198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867 (11)
There are
(1198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867) sdot
997888997888rarr119863119864 = 0
1003816100381610038161003816100381610038161198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867
100381610038161003816100381610038161003816= 1
(12)
Therefore
1205937= ⟨
997888rarr1198835997888rarr1198837⟩ (13)
Up to now all of the 7 joint angles are calculatedThoughthe geometry vector approach we used can meet the demandof most cases there are still some situations where it cannot work well for example the plane consisting of pointsShoulderLeft ElbowLfet and WristLeft does not exist
Then two kinds of experiments have been implementedto verify the performance of the approach The experimentenvironment is an indoor and adequate illumination envi-ronment Only one person stands forward to Kinect in thedistance about 2 meters The first one is the static positionexperiment shown in Figure 5 There is no doubt aboutobversing that the curves of 120593
1 1205932 1205933 1205934 1205936 and 120593
7are in an
accurate and correct variation They are smoothing and thefluctuation is so tiny that can be ignored But the fluctuationof 1205935is obvious The reason is that in this situation the
plane CDE consisting of points ShoulderLeft ElbowLeft andWristLeft is not stable because the positions captured byKinect of these three points are almost collinear therefore thenormal vector of the plane will jitter in the precision scope ofthe sensor Although there are indeed some fluctuations of
6 Discrete Dynamics in Nature and Society
Value of seven angles at initial position
Valu
e of a
ngle
s
0
05
1
15
2
25
3
35
50 100 150 200 250 3000Frames
120593112059321205933
120593512059361205937
1205934
Figure 5The initial positions of all joint angles Operator stands statically in front of Kinect and keeps his upper and lower arm in a line andhorizontal just as showed in the left picture The right picture presents the variation of 7 joint angles in successive frames
the curves their overall trends are correct and acceptablewhich demonstrates that the approach to get the values ofthese 7 joint angles works well in static action situation
Figures 6 and 7 are the two dynamic actions which repre-sent the variation of the upper arm and forearm respectivelynamely the joint angles 120593
3and 120593
5 It is evident to find
that angles 1205933and 120593
5have a periodic and regular variation
with the rotation of upper and lower arm from Figures 6and 7 These trajectories are consistent with the expectationindicating that our method is in good performance
In the end a simulation experiment was carried out toillustrate the real time performance of our approach in realenvironment The simulation platform used in this paper isBaxter robot model Baxter robot has two anthropomorphicarms that are all with 7 DOFs The experiment flow diagramcan be seen in Figure 8 From the results of this experimentwe observed that all of these 7 angles of the robot armswere changed smoothly along with variation of the operatorrsquosarm and the motions of both are similar but not identicalbecause of the different size of them which shows thatthe approach we proposed is feasible and effective On theother hand through the coordinate transformation betweenhuman coordinate and Baxter coordinate and the trial datawe can get the transformation matrix 119879 and offset matrix 119861from human coordinate system to robot coordinate That is
120579Robot = 119879120579Human + 119861 (14)
where
119879 =
[[[[[[[[[[[[[[
[
1 0 0 0 0 0 0
0 minus1 0 0 0 0 0
0 0 1 0 0 0 0
0 0 0 minus1 0 0 0
0 0 0 0 1 0 0
0 0 0 0 0 1 0
0 0 0 0 0 0 1
]]]]]]]]]]]]]]
]
119861 =
[[[[[[[[[[[[[[
[
minus246
120587
2
minus120587
120587
minus089
minus120587
0
]]]]]]]]]]]]]]
]
(15)
23 Discrete-Time Biomimetic Controller In this section adiscrete-time biomimetic controller with visual feedback ispresented for human and robot interaction Flash and Hogan[53] conducted several experiments aiming atmathematicallyrepresenting the kinematic part of the model They foundthat for a movement starting and ending with zero velocity(to and from end positions) the velocity profile of the handin a Cartesian coordinate system typically followed a bellcurve distributionThis velocity curve once integrated givesthe general kinematic representation of the trajectory of thehuman hand during a typical pushing task This relation isgiven by
119901 (119896) = 1198750+ Δ119875 (6119896
5
minus 151198964
+ 101198963
)
0 le 119896 =119905119894
119879le 1
(16)
where Δ119875 is the displacement performed in the trajectory 119896is the time constant 119875
0is the initial position vector and 119879 is
the total time required to perform the trajectoryPrevious researches [54ndash56] demonstrated the capability
of impedance control to be used as a reactive model to followthis kinematic model for human-robot collaboration (HRC)Three impedance parameters can be applied to this modelnamely mass damping and stiffness Kosuge and Kazamura
Discrete Dynamics in Nature and Society 7
50 100 150 200 250 3000Frames
Valu
e of a
ngle
0
05
1
15
2
25
3Value variation of 1205933 in successive frames
Figure 6 The operator keeps his body still and only rotates his arm circularly constantly and with a low and smooth speed from the originposition to limiting position
Value variation of 1205935 in successive frames
Valu
e of a
ngle
0
05
1
15
2
25
3
50 100 150 200 2500Frames
Figure 7The operator keeps his body still and only rotates his elbow circularly constantly and with a low and smooth speed from the originposition to limiting position
Host computer LinuxROS
Joint point Cartesian positions
Joint angles and hand posture
UDP sending data
Joint angles and stiffness variations
Torque control
Visual feedback
Figure 8 The simulation experiment flow diagram
8 Discrete Dynamics in Nature and Society
Feedforward
Impedance
Robotdynamics
Plannedmovement
++
+
Actualmovement
P(k)
p p p
p pr pr
minus
Ff
Fb
Figure 9 Scheme of HRC control model The feedforward 119865119891
corresponds to the force of human and 119865119887is force feedback based
on PD impedance controller which is employed to regulate robotjoint or endpoint impedance
[54] demonstrated experimentally that the effect of stiffnessparameters is negligible Hence this model can be expressedas
119865119891= 119898 + 119888 (17)
where 119865119891is a force vector between the human and robot119898 is
a virtual mass parameter 119888 is a virtual damping parameterand are respectively the velocity and accelerationvectors which can be derived from (16)
The torque input to the slave arm is produced by PDcontroller defined below in (18) which also employs a gravitycompensator 119865
119892 Consider
119865119887= 119863119887Δ + 119870
119887Δ119883 + 119865
119892 (18)
where 119863119887 119870119887are slave arm endpoint damping and stiffness
respectively The stiffness 119870119887is set in real time according to
the estimated stiffness at endpoint of the human operatorrsquoslimb and119863
119887is set proportional to119870
119887with a fixed ratio to be
specified by the designerThe endpoint force 119865
119887in Cartesian space needs to be
transformed to joint space by (19) in order to be implementedon the robot arm joint torque controller Consider
120591 = 119869119879
119865119887 (19)
where 120591 denotes robot joint torques 119865119887denotes robot end-
point force in Cartesian space and 119869 represents robot armJacobian Therefore the stiffness in joint space of the slaverobot can be derived from the stiffness in Cartesian spaceaccording to
119870119902
119903asymp 119869119879
119870ℎ119869 (20)
where 119870119902119903denotes robot joint stiffness and 119870
ℎis human arm
endpoint stiffness The model (shown in Figure 9) of forceand impedance enables simulation of a movement of the armor leg along a planned trajectory 119902(119896) in an environmentcharacterized by force and impedance First the torque iscomputed using (19) and (18) then impedance is used tocompute the effect of the feedback control item on human-robot interactions
3 Experimental Setup
The experimental platform is a dual-arm Baxter robot whichconsists of a torso 2-degree-of-freedom (2-DOF) head dualarms with 7 DOFs integrated cameras sonar torque sensorsencoders and direct programming access via Robot Operat-ing System (ROS) interface Each joint of Baxter robot arm isdriven by 7 serial elastic actuators (SEA) with intrinsic safetyMoreover joint stiffness and damping can be modified underBaxter robot torque control mode which is simplified as PDimpedance control law in this paper
To verify the efficiency of proposed HRC methodhuman-robot telemanipulation for moving objects (shown inFigure 10) is implemented with comparative tests under twodifferent scenarios that is low stiffness mode and humanoperated mode The robot left arm serves as slave armwhich is guided by human operatorrsquos limb endpoint Thehuman left arm serves as master arm As for the Baxterrobot simulator setup first Baxter simulator is launchedaccording to Baxter robot wiki guideline [57] Then inserta book shelf from gazebo environment library and 4 brickswhich are configured as shown in Figure 10 Human operatormoves Baxter left arm via visual feedback and adapts armpose to move the bricks to enable Baxter robot to imitatehuman motor adaptive behaviours by means of UDP com-munications between host computer and Baxter simulator Inaddition Baxter robot initial stiffness is set with a small value(Left S0 30 Left S1 30 Left E0 30 Left E1 20 Left W0 20Left W1 15 Left W2 10 unit Nmsdotrad)
4 Results
As indicated in Section 3 the experiment is based on twoscenarios as shown in Figure 11 Baxter motion is regulatedby human operator in real time The human operatorrsquos armis simplified as 7-DOF manipulator corresponding to Baxterrobot joints Meanwhile human hand posture is captured byKinect to control Baxter robot stiffness adaptations whichvary according to time of posture maintenance
Test I Human operator teleoperates Baxter robot usingKinect which extracts humanmotion regulations in real timeFirst the human operator guides Baxter to the book shelf andmake a precise positioning and calibration by visual feedbackSecond humanoperator employs pose 1 shown in Figure 11(a)to move the object but the object does not move at allNaturally human operator changes his arm configuration topose 2 and moves the object again and still cannot movethe object As indicated in Figure 13 Baxter robot can adaptits stiffness using different pose as well however the initialstiffness set on Baxter robot is too small to move the objectwith two poses
Test II As shown in Figure 13(b) human operator interactswith Baxter robot with human motion intention detectionbased on Kinect Human operator hand gesture is employedto control Baxter robot stiffness variations as shown inFigure 12 Generally fist means human operator strengthensmuscles to increase force to fulfil a specific task Thumb-up
Discrete Dynamics in Nature and Society 9
Brick5kg
Figure 10 Experimental setup for human and Baxter robot collaboration intuitively and compliantly in teleoperation scenario The virtualBaxter robot environment is based on ROS and gazebo [58] Four bricks are put on the shelf and their total weights are modified to 5 kgBaxter robot is supposed to move the four bricks with different arm configurations
(a) Object moving with pose 1 (b) Object moving with pose 2
Figure 11 Scheme of Baxter robot moving an object by two different poses The red arrows denote the force directions of the two posesrespectively
t
Stiff
ness
inde
x
0
1
Figure 12 Baxter robot stiffness control by human hand gestures fist increasing stiffness with a threshold thumb-up holding currentstiffness and finger spread decreasing stiffness
10 Discrete Dynamics in Nature and Society
02
minus02
06
1
5
10
15
20
40
60
Endp
oint
stiff
ness
(Nm
)En
dpoi
nt d
ispla
cem
ent (
m)
Start Pose 1 Pose 2 End
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(a) Object moving test I
Endp
oint
stiff
ness
(Nm
)
02
minus02
06
1
Endp
oint
disp
lace
men
t (m
)
Pose 1 Pose 2
5
15
25
35
45
40
80
120
EndStart
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(b) Object moving test II
Figure 13 Object moving test results (a) object moving without human postural stiffness index transfer (b) object moving with humanpostural stiffness transfer Both the two tests are composed of four steps start to move Baxter robot endpoint to the target move objects usingpose 1 and move objects with pose 2 and finally finish moving objects The predominated Baxter robot joint S0 is selected to track the torquevariations during the tests
denotes that the Baxter robot stiffness is sufficient to completetasks for example moving objects in this test We utilisefinger spread pose to present that Baxter robot needs todecrease stiffness to return compliant In this way Baxter canunderstand human motion intention simply but stably andefficiently
In this test human operator replicates motion that hasbeen done in test I During the first pose inmoving the objectBaxter can not complete the task while human operatorincreases Baxter stiffness via hand gesture However Baxter
can not make it as well In the second pose in moving objecthuman uses the same way to control Baxter motion andstiffness as well and Baxter can finish the task easily Whenthe task is completed human operator spreads fingers tomake Baxter robot return compliant
5 Conclusion
In this paper we have developed a natural interface indiscrete-time for human-robot collaboration by making
Discrete Dynamics in Nature and Society 11
robot understand human motion intention especially forstiffness adaptation instead of using EMG signals which needto be detected by adhering electrodes on the skin In additionwe used a geometry vector approach to extract human arm7-DOF Jacobian for stiffness transformation from Cartesianspace to joint space in real time A biomimetic controller isemployed for human and robot motion regulation transferExperiment validated that the proposed approach to HRCwas intuitive compliant and efficient It may have additionalapplications in various HRC scenarios
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported in part by State Key Laboratoryof Robotics and System (HIT) Grant SKLRS-2014-MS-05SKLRS201405B National Natural Science Foundation ofChina (NSFC) Grant 61273339 Heilongjiang Provincial Nat-ural Science Foundation of China Grants QC2014C072 andF2015010 The authors would like to acknowledge supportfromMr Chao Wang in the experiment implementation
References
[1] S A GreenM Billinghurst X Chen and J G Chase ldquoHuman-robot collaboration a literature review and augmented realityapproach in designrdquo International Journal of Advanced RoboticSystems vol 5 no 1 pp 1ndash18 2008
[2] B Chandrasekaran and J M Conrad ldquoHuman-robot collabo-ration a surveyrdquo in Proceedings of the IEEE SoutheastCon 2015pp 1ndash8 April 2015
[3] J-M Lu and Y-L Hsu ldquoTelepresence robots for medicaland homecare applicationsrdquo in Contemporary Issues in SystemsScience and Engineering M Zhou H-X Li and M WeijnenEds chapter 21 pp 725ndash735 JohnWiley amp Sons Hoboken NJUSA 2015
[4] T Arai R Kato and M Fujita ldquoAssessment of operator stressinduced by robot collaboration in assemblyrdquo CIRP AnnalsmdashManufacturing Technology vol 59 no 1 pp 5ndash8 2010
[5] A Bechar and Y Edan ldquoHuman-robot collaboration forimproved target recognition of agricultural robotsrdquo IndustrialRobot vol 30 no 5 pp 432ndash436 2003
[6] Top 10 emerging technologies of 2015 httpsagendaweforumorg
[7] B Matthias S Kock H Jerregard M Kallman and I Lund-berg ldquoSafety of collaborative industrial robots certificationpossibilities for a collaborative assembly robot conceptrdquo inProceedings of the IEEE International Symposium on Assemblyand Manufacturing (ISAM rsquo11) pp 1ndash6 Tampere Finland May2011
[8] V Morabito ldquoBig data driven business modelsrdquo in Big Data andAnalytics pp 65ndash80 Springer 2015
[9] B Scassellati and K M Tsui ldquoCo-robots humans and robotsoperating as partnersrdquo in Handbook of Science and TechnologyConvergence pp 1ndash10 Springer 2015
[10] W He A O David Z Yin and C Sun ldquoNeural networkcontrol of a robotic manipulator with input deadzone and
output constraintrdquo IEEE Transactions on Systems Man andCybernetics Systems 2015
[11] W He Y Chen and Z Yin ldquoAdaptive neural network controlof an uncertain robot with full-state constraintsrdquo IEEE Transac-tions on Cybernetics vol 46 no 3 pp 620ndash629 2016
[12] C Reardon H Tan B Kannan and L DeRose ldquoTowardssafe robot-human collaboration systems using human posedetectionrdquo in Proceedings of the IEEE International Conferenceon Technologies for Practical robot Applications (TePRA rsquo15) pp1ndash6 Woburn Mass USA May 2015
[13] W He Y Dong and C Sun ldquoAdaptive neural impedancecontrol of a robotic manipulator with input saturationrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 46no 3 pp 334ndash344 2016
[14] K Kronander and A Billard ldquoLearning compliant manipula-tion through kinesthetic and tactile human-robot interactionrdquoIEEE Transactions on Haptics vol 7 no 3 pp 367ndash380 2014
[15] L Peternel T Petric E Oztop and J Babic ldquoTeaching robots tocooperate with humans in dynamic manipulation tasks basedon multi-modal human-in-the-loop approachrdquo AutonomousRobots vol 36 no 1-2 pp 123ndash136 2014
[16] L D Rozo S Calinon D Caldwell P Jimenez and C TorrasldquoLearning collaborative impedance-based robot behaviorsrdquo inProceedings of the 27th AAAI Conference on Artificial Intelli-gence Bellevue Wash USA July 2013
[17] Kuka lbr robot profile March 2015 httpwwwkuka-roboticscomenproductsindustrial robotssensitiv
[18] Barrett wam arm profile 2015 httpwwwbarrettcomrobotproducts-armhtm
[19] A Jafari N G Tsagarakis and D G Caldwell ldquoAwAS-II a newactuator with adjustable stiffness based on the novel principle ofadaptable pivot point and variable lever ratiordquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo11) pp 4638ndash4643 Shanghai China May 2011
[20] M Grebenstein A Albu-Schaffer T Bahls et al ldquoThe DLRhand arm systemrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 3175ndash3182 Shanghai China May 2011
[21] S P Chan and H C Liaw ldquoGeneralized impedance controlof robot for assembly tasks requiring compliant manipulationrdquoIEEE Transactions on Industrial Electronics vol 43 no 4 pp453ndash461 1996
[22] J Buchli F Stulp E Theodorou and S Schaal ldquoLearningvariable impedance controlrdquo International Journal of RoboticsResearch vol 30 no 7 pp 820ndash833 2011
[23] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 Phuket Thailand December 2011
[24] A Ajoudani M Gabiccini N Tsagarakis A Albu-Schafferand A Bicchi ldquoTeleImpedance Exploring the role of common-mode and configuration- dependant stiffnessrdquo in Proceedingsof the 12th IEEE-RAS International Conference on HumanoidRobots Humanoids 2012 pp 363ndash369 Osaka Japan December2012
[25] N Hogan ldquoImpedance control an approach to manipulationpart IImdashimplementationrdquo Journal of Dynamic Systems Mea-surement and Control vol 107 no 1 pp 8ndash16 1985
[26] A Ajoudani N Tsagarakis and A Bicchi ldquoTele-impedanceteleoperation with impedance regulation using a body-machine
12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
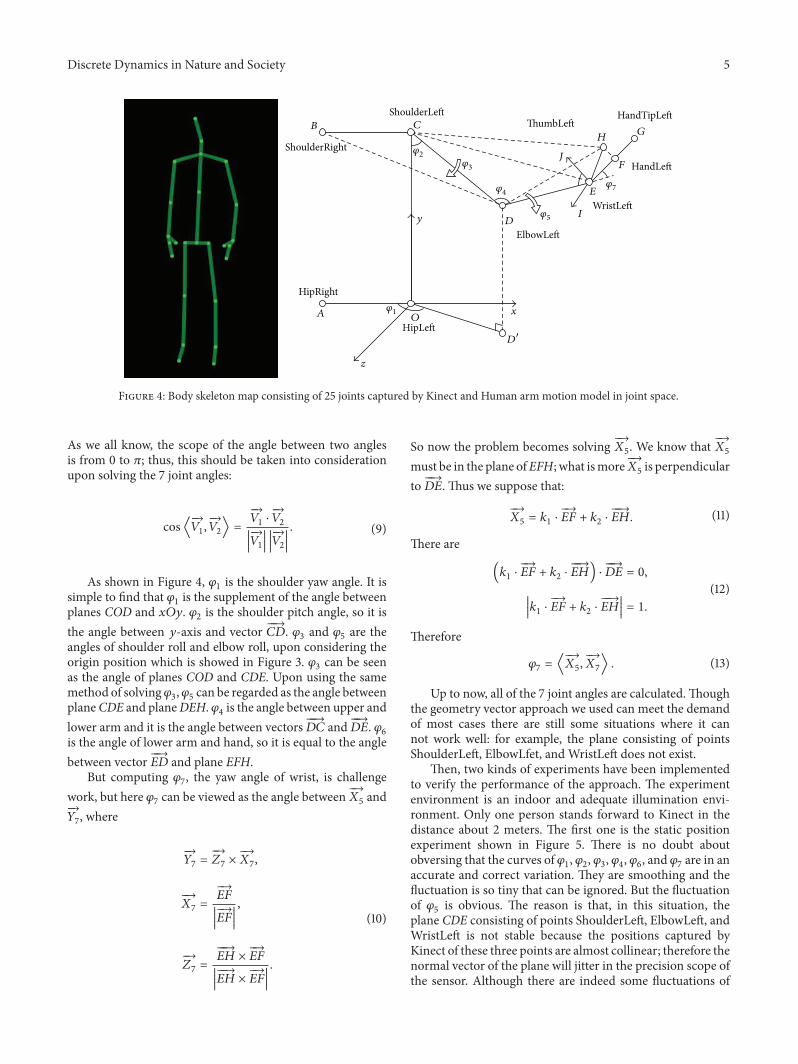
Discrete Dynamics in Nature and Society 5
OA
B C
D
E
F
GH
HipLeft
ShoulderLeft
ShoulderRight
HipRight
ElbowLeft
WristLeft
HandLeft
ThumbLeftHandTipLeft
I
J
1205931
12059321205933
1205934
x
z
y 1205935
1205937
D998400
Figure 4 Body skeleton map consisting of 25 joints captured by Kinect and Human arm motion model in joint space
As we all know the scope of the angle between two anglesis from 0 to 120587 thus this should be taken into considerationupon solving the 7 joint angles
cos⟨997888rarr1198811997888rarr1198812⟩ =
997888rarr1198811sdot997888rarr1198812
100381610038161003816100381610038161003816
997888rarr1198811
100381610038161003816100381610038161003816
100381610038161003816100381610038161003816
997888rarr1198812
100381610038161003816100381610038161003816
(9)
As shown in Figure 4 1205931is the shoulder yaw angle It is
simple to find that 1205931is the supplement of the angle between
planes COD and 119909119874119910 1205932is the shoulder pitch angle so it is
the angle between 119910-axis and vector 997888997888rarr119862119863 1205933and 120593
5are the
angles of shoulder roll and elbow roll upon considering theorigin position which is showed in Figure 3 120593
3can be seen
as the angle of planes COD and CDE Upon using the samemethod of solving120593
31205935can be regarded as the angle between
planeCDE and planeDEH 1205934is the angle between upper and
lower arm and it is the angle between vectors 997888997888rarr119863119862 and 997888997888rarr119863119864 1205936
is the angle of lower arm and hand so it is equal to the anglebetween vector 997888997888rarr119864119863 and plane EFH
But computing 1205937 the yaw angle of wrist is challenge
work but here 1205937can be viewed as the angle between 997888rarr119883
5and
997888rarr1198847 where
997888rarr1198847=997888rarr1198857times997888rarr1198837
997888rarr1198837=
997888rarr119864119865
100381610038161003816100381610038161003816
997888rarr119864119865100381610038161003816100381610038161003816
997888rarr1198857=
997888997888rarr119864119867 times
997888rarr119864119865
100381610038161003816100381610038161003816
997888997888rarr119864119867 times
997888rarr119864119865100381610038161003816100381610038161003816
(10)
So now the problem becomes solving 997888rarr1198835 We know that 997888rarr119883
5
must be in the plane ofEFH what ismore997888rarr1198835is perpendicular
to 997888997888rarr119863119864 Thus we suppose that997888rarr1198835= 1198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867 (11)
There are
(1198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867) sdot
997888997888rarr119863119864 = 0
1003816100381610038161003816100381610038161198961sdot997888rarr119864119865 + 119896
2sdot997888997888rarr119864119867
100381610038161003816100381610038161003816= 1
(12)
Therefore
1205937= ⟨
997888rarr1198835997888rarr1198837⟩ (13)
Up to now all of the 7 joint angles are calculatedThoughthe geometry vector approach we used can meet the demandof most cases there are still some situations where it cannot work well for example the plane consisting of pointsShoulderLeft ElbowLfet and WristLeft does not exist
Then two kinds of experiments have been implementedto verify the performance of the approach The experimentenvironment is an indoor and adequate illumination envi-ronment Only one person stands forward to Kinect in thedistance about 2 meters The first one is the static positionexperiment shown in Figure 5 There is no doubt aboutobversing that the curves of 120593
1 1205932 1205933 1205934 1205936 and 120593
7are in an
accurate and correct variation They are smoothing and thefluctuation is so tiny that can be ignored But the fluctuationof 1205935is obvious The reason is that in this situation the
plane CDE consisting of points ShoulderLeft ElbowLeft andWristLeft is not stable because the positions captured byKinect of these three points are almost collinear therefore thenormal vector of the plane will jitter in the precision scope ofthe sensor Although there are indeed some fluctuations of
6 Discrete Dynamics in Nature and Society
Value of seven angles at initial position
Valu
e of a
ngle
s
0
05
1
15
2
25
3
35
50 100 150 200 250 3000Frames
120593112059321205933
120593512059361205937
1205934
Figure 5The initial positions of all joint angles Operator stands statically in front of Kinect and keeps his upper and lower arm in a line andhorizontal just as showed in the left picture The right picture presents the variation of 7 joint angles in successive frames
the curves their overall trends are correct and acceptablewhich demonstrates that the approach to get the values ofthese 7 joint angles works well in static action situation
Figures 6 and 7 are the two dynamic actions which repre-sent the variation of the upper arm and forearm respectivelynamely the joint angles 120593
3and 120593
5 It is evident to find
that angles 1205933and 120593
5have a periodic and regular variation
with the rotation of upper and lower arm from Figures 6and 7 These trajectories are consistent with the expectationindicating that our method is in good performance
In the end a simulation experiment was carried out toillustrate the real time performance of our approach in realenvironment The simulation platform used in this paper isBaxter robot model Baxter robot has two anthropomorphicarms that are all with 7 DOFs The experiment flow diagramcan be seen in Figure 8 From the results of this experimentwe observed that all of these 7 angles of the robot armswere changed smoothly along with variation of the operatorrsquosarm and the motions of both are similar but not identicalbecause of the different size of them which shows thatthe approach we proposed is feasible and effective On theother hand through the coordinate transformation betweenhuman coordinate and Baxter coordinate and the trial datawe can get the transformation matrix 119879 and offset matrix 119861from human coordinate system to robot coordinate That is
120579Robot = 119879120579Human + 119861 (14)
where
119879 =
[[[[[[[[[[[[[[
[
1 0 0 0 0 0 0
0 minus1 0 0 0 0 0
0 0 1 0 0 0 0
0 0 0 minus1 0 0 0
0 0 0 0 1 0 0
0 0 0 0 0 1 0
0 0 0 0 0 0 1
]]]]]]]]]]]]]]
]
119861 =
[[[[[[[[[[[[[[
[
minus246
120587
2
minus120587
120587
minus089
minus120587
0
]]]]]]]]]]]]]]
]
(15)
23 Discrete-Time Biomimetic Controller In this section adiscrete-time biomimetic controller with visual feedback ispresented for human and robot interaction Flash and Hogan[53] conducted several experiments aiming atmathematicallyrepresenting the kinematic part of the model They foundthat for a movement starting and ending with zero velocity(to and from end positions) the velocity profile of the handin a Cartesian coordinate system typically followed a bellcurve distributionThis velocity curve once integrated givesthe general kinematic representation of the trajectory of thehuman hand during a typical pushing task This relation isgiven by
119901 (119896) = 1198750+ Δ119875 (6119896
5
minus 151198964
+ 101198963
)
0 le 119896 =119905119894
119879le 1
(16)
where Δ119875 is the displacement performed in the trajectory 119896is the time constant 119875
0is the initial position vector and 119879 is
the total time required to perform the trajectoryPrevious researches [54ndash56] demonstrated the capability
of impedance control to be used as a reactive model to followthis kinematic model for human-robot collaboration (HRC)Three impedance parameters can be applied to this modelnamely mass damping and stiffness Kosuge and Kazamura
Discrete Dynamics in Nature and Society 7
50 100 150 200 250 3000Frames
Valu
e of a
ngle
0
05
1
15
2
25
3Value variation of 1205933 in successive frames
Figure 6 The operator keeps his body still and only rotates his arm circularly constantly and with a low and smooth speed from the originposition to limiting position
Value variation of 1205935 in successive frames
Valu
e of a
ngle
0
05
1
15
2
25
3
50 100 150 200 2500Frames
Figure 7The operator keeps his body still and only rotates his elbow circularly constantly and with a low and smooth speed from the originposition to limiting position
Host computer LinuxROS
Joint point Cartesian positions
Joint angles and hand posture
UDP sending data
Joint angles and stiffness variations
Torque control
Visual feedback
Figure 8 The simulation experiment flow diagram
8 Discrete Dynamics in Nature and Society
Feedforward
Impedance
Robotdynamics
Plannedmovement
++
+
Actualmovement
P(k)
p p p
p pr pr
minus
Ff
Fb
Figure 9 Scheme of HRC control model The feedforward 119865119891
corresponds to the force of human and 119865119887is force feedback based
on PD impedance controller which is employed to regulate robotjoint or endpoint impedance
[54] demonstrated experimentally that the effect of stiffnessparameters is negligible Hence this model can be expressedas
119865119891= 119898 + 119888 (17)
where 119865119891is a force vector between the human and robot119898 is
a virtual mass parameter 119888 is a virtual damping parameterand are respectively the velocity and accelerationvectors which can be derived from (16)
The torque input to the slave arm is produced by PDcontroller defined below in (18) which also employs a gravitycompensator 119865
119892 Consider
119865119887= 119863119887Δ + 119870
119887Δ119883 + 119865
119892 (18)
where 119863119887 119870119887are slave arm endpoint damping and stiffness
respectively The stiffness 119870119887is set in real time according to
the estimated stiffness at endpoint of the human operatorrsquoslimb and119863
119887is set proportional to119870
119887with a fixed ratio to be
specified by the designerThe endpoint force 119865
119887in Cartesian space needs to be
transformed to joint space by (19) in order to be implementedon the robot arm joint torque controller Consider
120591 = 119869119879
119865119887 (19)
where 120591 denotes robot joint torques 119865119887denotes robot end-
point force in Cartesian space and 119869 represents robot armJacobian Therefore the stiffness in joint space of the slaverobot can be derived from the stiffness in Cartesian spaceaccording to
119870119902
119903asymp 119869119879
119870ℎ119869 (20)
where 119870119902119903denotes robot joint stiffness and 119870
ℎis human arm
endpoint stiffness The model (shown in Figure 9) of forceand impedance enables simulation of a movement of the armor leg along a planned trajectory 119902(119896) in an environmentcharacterized by force and impedance First the torque iscomputed using (19) and (18) then impedance is used tocompute the effect of the feedback control item on human-robot interactions
3 Experimental Setup
The experimental platform is a dual-arm Baxter robot whichconsists of a torso 2-degree-of-freedom (2-DOF) head dualarms with 7 DOFs integrated cameras sonar torque sensorsencoders and direct programming access via Robot Operat-ing System (ROS) interface Each joint of Baxter robot arm isdriven by 7 serial elastic actuators (SEA) with intrinsic safetyMoreover joint stiffness and damping can be modified underBaxter robot torque control mode which is simplified as PDimpedance control law in this paper
To verify the efficiency of proposed HRC methodhuman-robot telemanipulation for moving objects (shown inFigure 10) is implemented with comparative tests under twodifferent scenarios that is low stiffness mode and humanoperated mode The robot left arm serves as slave armwhich is guided by human operatorrsquos limb endpoint Thehuman left arm serves as master arm As for the Baxterrobot simulator setup first Baxter simulator is launchedaccording to Baxter robot wiki guideline [57] Then inserta book shelf from gazebo environment library and 4 brickswhich are configured as shown in Figure 10 Human operatormoves Baxter left arm via visual feedback and adapts armpose to move the bricks to enable Baxter robot to imitatehuman motor adaptive behaviours by means of UDP com-munications between host computer and Baxter simulator Inaddition Baxter robot initial stiffness is set with a small value(Left S0 30 Left S1 30 Left E0 30 Left E1 20 Left W0 20Left W1 15 Left W2 10 unit Nmsdotrad)
4 Results
As indicated in Section 3 the experiment is based on twoscenarios as shown in Figure 11 Baxter motion is regulatedby human operator in real time The human operatorrsquos armis simplified as 7-DOF manipulator corresponding to Baxterrobot joints Meanwhile human hand posture is captured byKinect to control Baxter robot stiffness adaptations whichvary according to time of posture maintenance
Test I Human operator teleoperates Baxter robot usingKinect which extracts humanmotion regulations in real timeFirst the human operator guides Baxter to the book shelf andmake a precise positioning and calibration by visual feedbackSecond humanoperator employs pose 1 shown in Figure 11(a)to move the object but the object does not move at allNaturally human operator changes his arm configuration topose 2 and moves the object again and still cannot movethe object As indicated in Figure 13 Baxter robot can adaptits stiffness using different pose as well however the initialstiffness set on Baxter robot is too small to move the objectwith two poses
Test II As shown in Figure 13(b) human operator interactswith Baxter robot with human motion intention detectionbased on Kinect Human operator hand gesture is employedto control Baxter robot stiffness variations as shown inFigure 12 Generally fist means human operator strengthensmuscles to increase force to fulfil a specific task Thumb-up
Discrete Dynamics in Nature and Society 9
Brick5kg
Figure 10 Experimental setup for human and Baxter robot collaboration intuitively and compliantly in teleoperation scenario The virtualBaxter robot environment is based on ROS and gazebo [58] Four bricks are put on the shelf and their total weights are modified to 5 kgBaxter robot is supposed to move the four bricks with different arm configurations
(a) Object moving with pose 1 (b) Object moving with pose 2
Figure 11 Scheme of Baxter robot moving an object by two different poses The red arrows denote the force directions of the two posesrespectively
t
Stiff
ness
inde
x
0
1
Figure 12 Baxter robot stiffness control by human hand gestures fist increasing stiffness with a threshold thumb-up holding currentstiffness and finger spread decreasing stiffness
10 Discrete Dynamics in Nature and Society
02
minus02
06
1
5
10
15
20
40
60
Endp
oint
stiff
ness
(Nm
)En
dpoi
nt d
ispla
cem
ent (
m)
Start Pose 1 Pose 2 End
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(a) Object moving test I
Endp
oint
stiff
ness
(Nm
)
02
minus02
06
1
Endp
oint
disp
lace
men
t (m
)
Pose 1 Pose 2
5
15
25
35
45
40
80
120
EndStart
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(b) Object moving test II
Figure 13 Object moving test results (a) object moving without human postural stiffness index transfer (b) object moving with humanpostural stiffness transfer Both the two tests are composed of four steps start to move Baxter robot endpoint to the target move objects usingpose 1 and move objects with pose 2 and finally finish moving objects The predominated Baxter robot joint S0 is selected to track the torquevariations during the tests
denotes that the Baxter robot stiffness is sufficient to completetasks for example moving objects in this test We utilisefinger spread pose to present that Baxter robot needs todecrease stiffness to return compliant In this way Baxter canunderstand human motion intention simply but stably andefficiently
In this test human operator replicates motion that hasbeen done in test I During the first pose inmoving the objectBaxter can not complete the task while human operatorincreases Baxter stiffness via hand gesture However Baxter
can not make it as well In the second pose in moving objecthuman uses the same way to control Baxter motion andstiffness as well and Baxter can finish the task easily Whenthe task is completed human operator spreads fingers tomake Baxter robot return compliant
5 Conclusion
In this paper we have developed a natural interface indiscrete-time for human-robot collaboration by making
Discrete Dynamics in Nature and Society 11
robot understand human motion intention especially forstiffness adaptation instead of using EMG signals which needto be detected by adhering electrodes on the skin In additionwe used a geometry vector approach to extract human arm7-DOF Jacobian for stiffness transformation from Cartesianspace to joint space in real time A biomimetic controller isemployed for human and robot motion regulation transferExperiment validated that the proposed approach to HRCwas intuitive compliant and efficient It may have additionalapplications in various HRC scenarios
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported in part by State Key Laboratoryof Robotics and System (HIT) Grant SKLRS-2014-MS-05SKLRS201405B National Natural Science Foundation ofChina (NSFC) Grant 61273339 Heilongjiang Provincial Nat-ural Science Foundation of China Grants QC2014C072 andF2015010 The authors would like to acknowledge supportfromMr Chao Wang in the experiment implementation
References
[1] S A GreenM Billinghurst X Chen and J G Chase ldquoHuman-robot collaboration a literature review and augmented realityapproach in designrdquo International Journal of Advanced RoboticSystems vol 5 no 1 pp 1ndash18 2008
[2] B Chandrasekaran and J M Conrad ldquoHuman-robot collabo-ration a surveyrdquo in Proceedings of the IEEE SoutheastCon 2015pp 1ndash8 April 2015
[3] J-M Lu and Y-L Hsu ldquoTelepresence robots for medicaland homecare applicationsrdquo in Contemporary Issues in SystemsScience and Engineering M Zhou H-X Li and M WeijnenEds chapter 21 pp 725ndash735 JohnWiley amp Sons Hoboken NJUSA 2015
[4] T Arai R Kato and M Fujita ldquoAssessment of operator stressinduced by robot collaboration in assemblyrdquo CIRP AnnalsmdashManufacturing Technology vol 59 no 1 pp 5ndash8 2010
[5] A Bechar and Y Edan ldquoHuman-robot collaboration forimproved target recognition of agricultural robotsrdquo IndustrialRobot vol 30 no 5 pp 432ndash436 2003
[6] Top 10 emerging technologies of 2015 httpsagendaweforumorg
[7] B Matthias S Kock H Jerregard M Kallman and I Lund-berg ldquoSafety of collaborative industrial robots certificationpossibilities for a collaborative assembly robot conceptrdquo inProceedings of the IEEE International Symposium on Assemblyand Manufacturing (ISAM rsquo11) pp 1ndash6 Tampere Finland May2011
[8] V Morabito ldquoBig data driven business modelsrdquo in Big Data andAnalytics pp 65ndash80 Springer 2015
[9] B Scassellati and K M Tsui ldquoCo-robots humans and robotsoperating as partnersrdquo in Handbook of Science and TechnologyConvergence pp 1ndash10 Springer 2015
[10] W He A O David Z Yin and C Sun ldquoNeural networkcontrol of a robotic manipulator with input deadzone and
output constraintrdquo IEEE Transactions on Systems Man andCybernetics Systems 2015
[11] W He Y Chen and Z Yin ldquoAdaptive neural network controlof an uncertain robot with full-state constraintsrdquo IEEE Transac-tions on Cybernetics vol 46 no 3 pp 620ndash629 2016
[12] C Reardon H Tan B Kannan and L DeRose ldquoTowardssafe robot-human collaboration systems using human posedetectionrdquo in Proceedings of the IEEE International Conferenceon Technologies for Practical robot Applications (TePRA rsquo15) pp1ndash6 Woburn Mass USA May 2015
[13] W He Y Dong and C Sun ldquoAdaptive neural impedancecontrol of a robotic manipulator with input saturationrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 46no 3 pp 334ndash344 2016
[14] K Kronander and A Billard ldquoLearning compliant manipula-tion through kinesthetic and tactile human-robot interactionrdquoIEEE Transactions on Haptics vol 7 no 3 pp 367ndash380 2014
[15] L Peternel T Petric E Oztop and J Babic ldquoTeaching robots tocooperate with humans in dynamic manipulation tasks basedon multi-modal human-in-the-loop approachrdquo AutonomousRobots vol 36 no 1-2 pp 123ndash136 2014
[16] L D Rozo S Calinon D Caldwell P Jimenez and C TorrasldquoLearning collaborative impedance-based robot behaviorsrdquo inProceedings of the 27th AAAI Conference on Artificial Intelli-gence Bellevue Wash USA July 2013
[17] Kuka lbr robot profile March 2015 httpwwwkuka-roboticscomenproductsindustrial robotssensitiv
[18] Barrett wam arm profile 2015 httpwwwbarrettcomrobotproducts-armhtm
[19] A Jafari N G Tsagarakis and D G Caldwell ldquoAwAS-II a newactuator with adjustable stiffness based on the novel principle ofadaptable pivot point and variable lever ratiordquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo11) pp 4638ndash4643 Shanghai China May 2011
[20] M Grebenstein A Albu-Schaffer T Bahls et al ldquoThe DLRhand arm systemrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 3175ndash3182 Shanghai China May 2011
[21] S P Chan and H C Liaw ldquoGeneralized impedance controlof robot for assembly tasks requiring compliant manipulationrdquoIEEE Transactions on Industrial Electronics vol 43 no 4 pp453ndash461 1996
[22] J Buchli F Stulp E Theodorou and S Schaal ldquoLearningvariable impedance controlrdquo International Journal of RoboticsResearch vol 30 no 7 pp 820ndash833 2011
[23] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 Phuket Thailand December 2011
[24] A Ajoudani M Gabiccini N Tsagarakis A Albu-Schafferand A Bicchi ldquoTeleImpedance Exploring the role of common-mode and configuration- dependant stiffnessrdquo in Proceedingsof the 12th IEEE-RAS International Conference on HumanoidRobots Humanoids 2012 pp 363ndash369 Osaka Japan December2012
[25] N Hogan ldquoImpedance control an approach to manipulationpart IImdashimplementationrdquo Journal of Dynamic Systems Mea-surement and Control vol 107 no 1 pp 8ndash16 1985
[26] A Ajoudani N Tsagarakis and A Bicchi ldquoTele-impedanceteleoperation with impedance regulation using a body-machine
12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Discrete Dynamics in Nature and Society
Value of seven angles at initial position
Valu
e of a
ngle
s
0
05
1
15
2
25
3
35
50 100 150 200 250 3000Frames
120593112059321205933
120593512059361205937
1205934
Figure 5The initial positions of all joint angles Operator stands statically in front of Kinect and keeps his upper and lower arm in a line andhorizontal just as showed in the left picture The right picture presents the variation of 7 joint angles in successive frames
the curves their overall trends are correct and acceptablewhich demonstrates that the approach to get the values ofthese 7 joint angles works well in static action situation
Figures 6 and 7 are the two dynamic actions which repre-sent the variation of the upper arm and forearm respectivelynamely the joint angles 120593
3and 120593
5 It is evident to find
that angles 1205933and 120593
5have a periodic and regular variation
with the rotation of upper and lower arm from Figures 6and 7 These trajectories are consistent with the expectationindicating that our method is in good performance
In the end a simulation experiment was carried out toillustrate the real time performance of our approach in realenvironment The simulation platform used in this paper isBaxter robot model Baxter robot has two anthropomorphicarms that are all with 7 DOFs The experiment flow diagramcan be seen in Figure 8 From the results of this experimentwe observed that all of these 7 angles of the robot armswere changed smoothly along with variation of the operatorrsquosarm and the motions of both are similar but not identicalbecause of the different size of them which shows thatthe approach we proposed is feasible and effective On theother hand through the coordinate transformation betweenhuman coordinate and Baxter coordinate and the trial datawe can get the transformation matrix 119879 and offset matrix 119861from human coordinate system to robot coordinate That is
120579Robot = 119879120579Human + 119861 (14)
where
119879 =
[[[[[[[[[[[[[[
[
1 0 0 0 0 0 0
0 minus1 0 0 0 0 0
0 0 1 0 0 0 0
0 0 0 minus1 0 0 0
0 0 0 0 1 0 0
0 0 0 0 0 1 0
0 0 0 0 0 0 1
]]]]]]]]]]]]]]
]
119861 =
[[[[[[[[[[[[[[
[
minus246
120587
2
minus120587
120587
minus089
minus120587
0
]]]]]]]]]]]]]]
]
(15)
23 Discrete-Time Biomimetic Controller In this section adiscrete-time biomimetic controller with visual feedback ispresented for human and robot interaction Flash and Hogan[53] conducted several experiments aiming atmathematicallyrepresenting the kinematic part of the model They foundthat for a movement starting and ending with zero velocity(to and from end positions) the velocity profile of the handin a Cartesian coordinate system typically followed a bellcurve distributionThis velocity curve once integrated givesthe general kinematic representation of the trajectory of thehuman hand during a typical pushing task This relation isgiven by
119901 (119896) = 1198750+ Δ119875 (6119896
5
minus 151198964
+ 101198963
)
0 le 119896 =119905119894
119879le 1
(16)
where Δ119875 is the displacement performed in the trajectory 119896is the time constant 119875
0is the initial position vector and 119879 is
the total time required to perform the trajectoryPrevious researches [54ndash56] demonstrated the capability
of impedance control to be used as a reactive model to followthis kinematic model for human-robot collaboration (HRC)Three impedance parameters can be applied to this modelnamely mass damping and stiffness Kosuge and Kazamura
Discrete Dynamics in Nature and Society 7
50 100 150 200 250 3000Frames
Valu
e of a
ngle
0
05
1
15
2
25
3Value variation of 1205933 in successive frames
Figure 6 The operator keeps his body still and only rotates his arm circularly constantly and with a low and smooth speed from the originposition to limiting position
Value variation of 1205935 in successive frames
Valu
e of a
ngle
0
05
1
15
2
25
3
50 100 150 200 2500Frames
Figure 7The operator keeps his body still and only rotates his elbow circularly constantly and with a low and smooth speed from the originposition to limiting position
Host computer LinuxROS
Joint point Cartesian positions
Joint angles and hand posture
UDP sending data
Joint angles and stiffness variations
Torque control
Visual feedback
Figure 8 The simulation experiment flow diagram
8 Discrete Dynamics in Nature and Society
Feedforward
Impedance
Robotdynamics
Plannedmovement
++
+
Actualmovement
P(k)
p p p
p pr pr
minus
Ff
Fb
Figure 9 Scheme of HRC control model The feedforward 119865119891
corresponds to the force of human and 119865119887is force feedback based
on PD impedance controller which is employed to regulate robotjoint or endpoint impedance
[54] demonstrated experimentally that the effect of stiffnessparameters is negligible Hence this model can be expressedas
119865119891= 119898 + 119888 (17)
where 119865119891is a force vector between the human and robot119898 is
a virtual mass parameter 119888 is a virtual damping parameterand are respectively the velocity and accelerationvectors which can be derived from (16)
The torque input to the slave arm is produced by PDcontroller defined below in (18) which also employs a gravitycompensator 119865
119892 Consider
119865119887= 119863119887Δ + 119870
119887Δ119883 + 119865
119892 (18)
where 119863119887 119870119887are slave arm endpoint damping and stiffness
respectively The stiffness 119870119887is set in real time according to
the estimated stiffness at endpoint of the human operatorrsquoslimb and119863
119887is set proportional to119870
119887with a fixed ratio to be
specified by the designerThe endpoint force 119865
119887in Cartesian space needs to be
transformed to joint space by (19) in order to be implementedon the robot arm joint torque controller Consider
120591 = 119869119879
119865119887 (19)
where 120591 denotes robot joint torques 119865119887denotes robot end-
point force in Cartesian space and 119869 represents robot armJacobian Therefore the stiffness in joint space of the slaverobot can be derived from the stiffness in Cartesian spaceaccording to
119870119902
119903asymp 119869119879
119870ℎ119869 (20)
where 119870119902119903denotes robot joint stiffness and 119870
ℎis human arm
endpoint stiffness The model (shown in Figure 9) of forceand impedance enables simulation of a movement of the armor leg along a planned trajectory 119902(119896) in an environmentcharacterized by force and impedance First the torque iscomputed using (19) and (18) then impedance is used tocompute the effect of the feedback control item on human-robot interactions
3 Experimental Setup
The experimental platform is a dual-arm Baxter robot whichconsists of a torso 2-degree-of-freedom (2-DOF) head dualarms with 7 DOFs integrated cameras sonar torque sensorsencoders and direct programming access via Robot Operat-ing System (ROS) interface Each joint of Baxter robot arm isdriven by 7 serial elastic actuators (SEA) with intrinsic safetyMoreover joint stiffness and damping can be modified underBaxter robot torque control mode which is simplified as PDimpedance control law in this paper
To verify the efficiency of proposed HRC methodhuman-robot telemanipulation for moving objects (shown inFigure 10) is implemented with comparative tests under twodifferent scenarios that is low stiffness mode and humanoperated mode The robot left arm serves as slave armwhich is guided by human operatorrsquos limb endpoint Thehuman left arm serves as master arm As for the Baxterrobot simulator setup first Baxter simulator is launchedaccording to Baxter robot wiki guideline [57] Then inserta book shelf from gazebo environment library and 4 brickswhich are configured as shown in Figure 10 Human operatormoves Baxter left arm via visual feedback and adapts armpose to move the bricks to enable Baxter robot to imitatehuman motor adaptive behaviours by means of UDP com-munications between host computer and Baxter simulator Inaddition Baxter robot initial stiffness is set with a small value(Left S0 30 Left S1 30 Left E0 30 Left E1 20 Left W0 20Left W1 15 Left W2 10 unit Nmsdotrad)
4 Results
As indicated in Section 3 the experiment is based on twoscenarios as shown in Figure 11 Baxter motion is regulatedby human operator in real time The human operatorrsquos armis simplified as 7-DOF manipulator corresponding to Baxterrobot joints Meanwhile human hand posture is captured byKinect to control Baxter robot stiffness adaptations whichvary according to time of posture maintenance
Test I Human operator teleoperates Baxter robot usingKinect which extracts humanmotion regulations in real timeFirst the human operator guides Baxter to the book shelf andmake a precise positioning and calibration by visual feedbackSecond humanoperator employs pose 1 shown in Figure 11(a)to move the object but the object does not move at allNaturally human operator changes his arm configuration topose 2 and moves the object again and still cannot movethe object As indicated in Figure 13 Baxter robot can adaptits stiffness using different pose as well however the initialstiffness set on Baxter robot is too small to move the objectwith two poses
Test II As shown in Figure 13(b) human operator interactswith Baxter robot with human motion intention detectionbased on Kinect Human operator hand gesture is employedto control Baxter robot stiffness variations as shown inFigure 12 Generally fist means human operator strengthensmuscles to increase force to fulfil a specific task Thumb-up
Discrete Dynamics in Nature and Society 9
Brick5kg
Figure 10 Experimental setup for human and Baxter robot collaboration intuitively and compliantly in teleoperation scenario The virtualBaxter robot environment is based on ROS and gazebo [58] Four bricks are put on the shelf and their total weights are modified to 5 kgBaxter robot is supposed to move the four bricks with different arm configurations
(a) Object moving with pose 1 (b) Object moving with pose 2
Figure 11 Scheme of Baxter robot moving an object by two different poses The red arrows denote the force directions of the two posesrespectively
t
Stiff
ness
inde
x
0
1
Figure 12 Baxter robot stiffness control by human hand gestures fist increasing stiffness with a threshold thumb-up holding currentstiffness and finger spread decreasing stiffness
10 Discrete Dynamics in Nature and Society
02
minus02
06
1
5
10
15
20
40
60
Endp
oint
stiff
ness
(Nm
)En
dpoi
nt d
ispla
cem
ent (
m)
Start Pose 1 Pose 2 End
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(a) Object moving test I
Endp
oint
stiff
ness
(Nm
)
02
minus02
06
1
Endp
oint
disp
lace
men
t (m
)
Pose 1 Pose 2
5
15
25
35
45
40
80
120
EndStart
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(b) Object moving test II
Figure 13 Object moving test results (a) object moving without human postural stiffness index transfer (b) object moving with humanpostural stiffness transfer Both the two tests are composed of four steps start to move Baxter robot endpoint to the target move objects usingpose 1 and move objects with pose 2 and finally finish moving objects The predominated Baxter robot joint S0 is selected to track the torquevariations during the tests
denotes that the Baxter robot stiffness is sufficient to completetasks for example moving objects in this test We utilisefinger spread pose to present that Baxter robot needs todecrease stiffness to return compliant In this way Baxter canunderstand human motion intention simply but stably andefficiently
In this test human operator replicates motion that hasbeen done in test I During the first pose inmoving the objectBaxter can not complete the task while human operatorincreases Baxter stiffness via hand gesture However Baxter
can not make it as well In the second pose in moving objecthuman uses the same way to control Baxter motion andstiffness as well and Baxter can finish the task easily Whenthe task is completed human operator spreads fingers tomake Baxter robot return compliant
5 Conclusion
In this paper we have developed a natural interface indiscrete-time for human-robot collaboration by making
Discrete Dynamics in Nature and Society 11
robot understand human motion intention especially forstiffness adaptation instead of using EMG signals which needto be detected by adhering electrodes on the skin In additionwe used a geometry vector approach to extract human arm7-DOF Jacobian for stiffness transformation from Cartesianspace to joint space in real time A biomimetic controller isemployed for human and robot motion regulation transferExperiment validated that the proposed approach to HRCwas intuitive compliant and efficient It may have additionalapplications in various HRC scenarios
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported in part by State Key Laboratoryof Robotics and System (HIT) Grant SKLRS-2014-MS-05SKLRS201405B National Natural Science Foundation ofChina (NSFC) Grant 61273339 Heilongjiang Provincial Nat-ural Science Foundation of China Grants QC2014C072 andF2015010 The authors would like to acknowledge supportfromMr Chao Wang in the experiment implementation
References
[1] S A GreenM Billinghurst X Chen and J G Chase ldquoHuman-robot collaboration a literature review and augmented realityapproach in designrdquo International Journal of Advanced RoboticSystems vol 5 no 1 pp 1ndash18 2008
[2] B Chandrasekaran and J M Conrad ldquoHuman-robot collabo-ration a surveyrdquo in Proceedings of the IEEE SoutheastCon 2015pp 1ndash8 April 2015
[3] J-M Lu and Y-L Hsu ldquoTelepresence robots for medicaland homecare applicationsrdquo in Contemporary Issues in SystemsScience and Engineering M Zhou H-X Li and M WeijnenEds chapter 21 pp 725ndash735 JohnWiley amp Sons Hoboken NJUSA 2015
[4] T Arai R Kato and M Fujita ldquoAssessment of operator stressinduced by robot collaboration in assemblyrdquo CIRP AnnalsmdashManufacturing Technology vol 59 no 1 pp 5ndash8 2010
[5] A Bechar and Y Edan ldquoHuman-robot collaboration forimproved target recognition of agricultural robotsrdquo IndustrialRobot vol 30 no 5 pp 432ndash436 2003
[6] Top 10 emerging technologies of 2015 httpsagendaweforumorg
[7] B Matthias S Kock H Jerregard M Kallman and I Lund-berg ldquoSafety of collaborative industrial robots certificationpossibilities for a collaborative assembly robot conceptrdquo inProceedings of the IEEE International Symposium on Assemblyand Manufacturing (ISAM rsquo11) pp 1ndash6 Tampere Finland May2011
[8] V Morabito ldquoBig data driven business modelsrdquo in Big Data andAnalytics pp 65ndash80 Springer 2015
[9] B Scassellati and K M Tsui ldquoCo-robots humans and robotsoperating as partnersrdquo in Handbook of Science and TechnologyConvergence pp 1ndash10 Springer 2015
[10] W He A O David Z Yin and C Sun ldquoNeural networkcontrol of a robotic manipulator with input deadzone and
output constraintrdquo IEEE Transactions on Systems Man andCybernetics Systems 2015
[11] W He Y Chen and Z Yin ldquoAdaptive neural network controlof an uncertain robot with full-state constraintsrdquo IEEE Transac-tions on Cybernetics vol 46 no 3 pp 620ndash629 2016
[12] C Reardon H Tan B Kannan and L DeRose ldquoTowardssafe robot-human collaboration systems using human posedetectionrdquo in Proceedings of the IEEE International Conferenceon Technologies for Practical robot Applications (TePRA rsquo15) pp1ndash6 Woburn Mass USA May 2015
[13] W He Y Dong and C Sun ldquoAdaptive neural impedancecontrol of a robotic manipulator with input saturationrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 46no 3 pp 334ndash344 2016
[14] K Kronander and A Billard ldquoLearning compliant manipula-tion through kinesthetic and tactile human-robot interactionrdquoIEEE Transactions on Haptics vol 7 no 3 pp 367ndash380 2014
[15] L Peternel T Petric E Oztop and J Babic ldquoTeaching robots tocooperate with humans in dynamic manipulation tasks basedon multi-modal human-in-the-loop approachrdquo AutonomousRobots vol 36 no 1-2 pp 123ndash136 2014
[16] L D Rozo S Calinon D Caldwell P Jimenez and C TorrasldquoLearning collaborative impedance-based robot behaviorsrdquo inProceedings of the 27th AAAI Conference on Artificial Intelli-gence Bellevue Wash USA July 2013
[17] Kuka lbr robot profile March 2015 httpwwwkuka-roboticscomenproductsindustrial robotssensitiv
[18] Barrett wam arm profile 2015 httpwwwbarrettcomrobotproducts-armhtm
[19] A Jafari N G Tsagarakis and D G Caldwell ldquoAwAS-II a newactuator with adjustable stiffness based on the novel principle ofadaptable pivot point and variable lever ratiordquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo11) pp 4638ndash4643 Shanghai China May 2011
[20] M Grebenstein A Albu-Schaffer T Bahls et al ldquoThe DLRhand arm systemrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 3175ndash3182 Shanghai China May 2011
[21] S P Chan and H C Liaw ldquoGeneralized impedance controlof robot for assembly tasks requiring compliant manipulationrdquoIEEE Transactions on Industrial Electronics vol 43 no 4 pp453ndash461 1996
[22] J Buchli F Stulp E Theodorou and S Schaal ldquoLearningvariable impedance controlrdquo International Journal of RoboticsResearch vol 30 no 7 pp 820ndash833 2011
[23] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 Phuket Thailand December 2011
[24] A Ajoudani M Gabiccini N Tsagarakis A Albu-Schafferand A Bicchi ldquoTeleImpedance Exploring the role of common-mode and configuration- dependant stiffnessrdquo in Proceedingsof the 12th IEEE-RAS International Conference on HumanoidRobots Humanoids 2012 pp 363ndash369 Osaka Japan December2012
[25] N Hogan ldquoImpedance control an approach to manipulationpart IImdashimplementationrdquo Journal of Dynamic Systems Mea-surement and Control vol 107 no 1 pp 8ndash16 1985
[26] A Ajoudani N Tsagarakis and A Bicchi ldquoTele-impedanceteleoperation with impedance regulation using a body-machine
12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
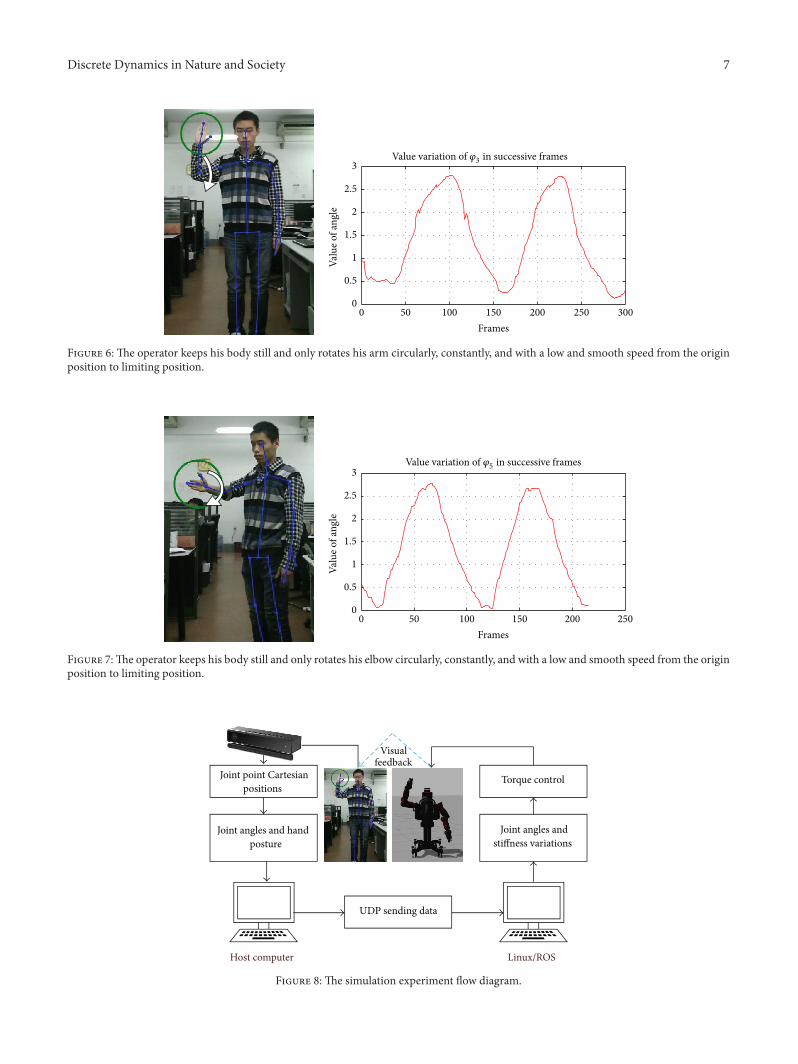
Discrete Dynamics in Nature and Society 7
50 100 150 200 250 3000Frames
Valu
e of a
ngle
0
05
1
15
2
25
3Value variation of 1205933 in successive frames
Figure 6 The operator keeps his body still and only rotates his arm circularly constantly and with a low and smooth speed from the originposition to limiting position
Value variation of 1205935 in successive frames
Valu
e of a
ngle
0
05
1
15
2
25
3
50 100 150 200 2500Frames
Figure 7The operator keeps his body still and only rotates his elbow circularly constantly and with a low and smooth speed from the originposition to limiting position
Host computer LinuxROS
Joint point Cartesian positions
Joint angles and hand posture
UDP sending data
Joint angles and stiffness variations
Torque control
Visual feedback
Figure 8 The simulation experiment flow diagram
8 Discrete Dynamics in Nature and Society
Feedforward
Impedance
Robotdynamics
Plannedmovement
++
+
Actualmovement
P(k)
p p p
p pr pr
minus
Ff
Fb
Figure 9 Scheme of HRC control model The feedforward 119865119891
corresponds to the force of human and 119865119887is force feedback based
on PD impedance controller which is employed to regulate robotjoint or endpoint impedance
[54] demonstrated experimentally that the effect of stiffnessparameters is negligible Hence this model can be expressedas
119865119891= 119898 + 119888 (17)
where 119865119891is a force vector between the human and robot119898 is
a virtual mass parameter 119888 is a virtual damping parameterand are respectively the velocity and accelerationvectors which can be derived from (16)
The torque input to the slave arm is produced by PDcontroller defined below in (18) which also employs a gravitycompensator 119865
119892 Consider
119865119887= 119863119887Δ + 119870
119887Δ119883 + 119865
119892 (18)
where 119863119887 119870119887are slave arm endpoint damping and stiffness
respectively The stiffness 119870119887is set in real time according to
the estimated stiffness at endpoint of the human operatorrsquoslimb and119863
119887is set proportional to119870
119887with a fixed ratio to be
specified by the designerThe endpoint force 119865
119887in Cartesian space needs to be
transformed to joint space by (19) in order to be implementedon the robot arm joint torque controller Consider
120591 = 119869119879
119865119887 (19)
where 120591 denotes robot joint torques 119865119887denotes robot end-
point force in Cartesian space and 119869 represents robot armJacobian Therefore the stiffness in joint space of the slaverobot can be derived from the stiffness in Cartesian spaceaccording to
119870119902
119903asymp 119869119879
119870ℎ119869 (20)
where 119870119902119903denotes robot joint stiffness and 119870
ℎis human arm
endpoint stiffness The model (shown in Figure 9) of forceand impedance enables simulation of a movement of the armor leg along a planned trajectory 119902(119896) in an environmentcharacterized by force and impedance First the torque iscomputed using (19) and (18) then impedance is used tocompute the effect of the feedback control item on human-robot interactions
3 Experimental Setup
The experimental platform is a dual-arm Baxter robot whichconsists of a torso 2-degree-of-freedom (2-DOF) head dualarms with 7 DOFs integrated cameras sonar torque sensorsencoders and direct programming access via Robot Operat-ing System (ROS) interface Each joint of Baxter robot arm isdriven by 7 serial elastic actuators (SEA) with intrinsic safetyMoreover joint stiffness and damping can be modified underBaxter robot torque control mode which is simplified as PDimpedance control law in this paper
To verify the efficiency of proposed HRC methodhuman-robot telemanipulation for moving objects (shown inFigure 10) is implemented with comparative tests under twodifferent scenarios that is low stiffness mode and humanoperated mode The robot left arm serves as slave armwhich is guided by human operatorrsquos limb endpoint Thehuman left arm serves as master arm As for the Baxterrobot simulator setup first Baxter simulator is launchedaccording to Baxter robot wiki guideline [57] Then inserta book shelf from gazebo environment library and 4 brickswhich are configured as shown in Figure 10 Human operatormoves Baxter left arm via visual feedback and adapts armpose to move the bricks to enable Baxter robot to imitatehuman motor adaptive behaviours by means of UDP com-munications between host computer and Baxter simulator Inaddition Baxter robot initial stiffness is set with a small value(Left S0 30 Left S1 30 Left E0 30 Left E1 20 Left W0 20Left W1 15 Left W2 10 unit Nmsdotrad)
4 Results
As indicated in Section 3 the experiment is based on twoscenarios as shown in Figure 11 Baxter motion is regulatedby human operator in real time The human operatorrsquos armis simplified as 7-DOF manipulator corresponding to Baxterrobot joints Meanwhile human hand posture is captured byKinect to control Baxter robot stiffness adaptations whichvary according to time of posture maintenance
Test I Human operator teleoperates Baxter robot usingKinect which extracts humanmotion regulations in real timeFirst the human operator guides Baxter to the book shelf andmake a precise positioning and calibration by visual feedbackSecond humanoperator employs pose 1 shown in Figure 11(a)to move the object but the object does not move at allNaturally human operator changes his arm configuration topose 2 and moves the object again and still cannot movethe object As indicated in Figure 13 Baxter robot can adaptits stiffness using different pose as well however the initialstiffness set on Baxter robot is too small to move the objectwith two poses
Test II As shown in Figure 13(b) human operator interactswith Baxter robot with human motion intention detectionbased on Kinect Human operator hand gesture is employedto control Baxter robot stiffness variations as shown inFigure 12 Generally fist means human operator strengthensmuscles to increase force to fulfil a specific task Thumb-up
Discrete Dynamics in Nature and Society 9
Brick5kg
Figure 10 Experimental setup for human and Baxter robot collaboration intuitively and compliantly in teleoperation scenario The virtualBaxter robot environment is based on ROS and gazebo [58] Four bricks are put on the shelf and their total weights are modified to 5 kgBaxter robot is supposed to move the four bricks with different arm configurations
(a) Object moving with pose 1 (b) Object moving with pose 2
Figure 11 Scheme of Baxter robot moving an object by two different poses The red arrows denote the force directions of the two posesrespectively
t
Stiff
ness
inde
x
0
1
Figure 12 Baxter robot stiffness control by human hand gestures fist increasing stiffness with a threshold thumb-up holding currentstiffness and finger spread decreasing stiffness
10 Discrete Dynamics in Nature and Society
02
minus02
06
1
5
10
15
20
40
60
Endp
oint
stiff
ness
(Nm
)En
dpoi
nt d
ispla
cem
ent (
m)
Start Pose 1 Pose 2 End
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(a) Object moving test I
Endp
oint
stiff
ness
(Nm
)
02
minus02
06
1
Endp
oint
disp
lace
men
t (m
)
Pose 1 Pose 2
5
15
25
35
45
40
80
120
EndStart
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(b) Object moving test II
Figure 13 Object moving test results (a) object moving without human postural stiffness index transfer (b) object moving with humanpostural stiffness transfer Both the two tests are composed of four steps start to move Baxter robot endpoint to the target move objects usingpose 1 and move objects with pose 2 and finally finish moving objects The predominated Baxter robot joint S0 is selected to track the torquevariations during the tests
denotes that the Baxter robot stiffness is sufficient to completetasks for example moving objects in this test We utilisefinger spread pose to present that Baxter robot needs todecrease stiffness to return compliant In this way Baxter canunderstand human motion intention simply but stably andefficiently
In this test human operator replicates motion that hasbeen done in test I During the first pose inmoving the objectBaxter can not complete the task while human operatorincreases Baxter stiffness via hand gesture However Baxter
can not make it as well In the second pose in moving objecthuman uses the same way to control Baxter motion andstiffness as well and Baxter can finish the task easily Whenthe task is completed human operator spreads fingers tomake Baxter robot return compliant
5 Conclusion
In this paper we have developed a natural interface indiscrete-time for human-robot collaboration by making
Discrete Dynamics in Nature and Society 11
robot understand human motion intention especially forstiffness adaptation instead of using EMG signals which needto be detected by adhering electrodes on the skin In additionwe used a geometry vector approach to extract human arm7-DOF Jacobian for stiffness transformation from Cartesianspace to joint space in real time A biomimetic controller isemployed for human and robot motion regulation transferExperiment validated that the proposed approach to HRCwas intuitive compliant and efficient It may have additionalapplications in various HRC scenarios
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported in part by State Key Laboratoryof Robotics and System (HIT) Grant SKLRS-2014-MS-05SKLRS201405B National Natural Science Foundation ofChina (NSFC) Grant 61273339 Heilongjiang Provincial Nat-ural Science Foundation of China Grants QC2014C072 andF2015010 The authors would like to acknowledge supportfromMr Chao Wang in the experiment implementation
References
[1] S A GreenM Billinghurst X Chen and J G Chase ldquoHuman-robot collaboration a literature review and augmented realityapproach in designrdquo International Journal of Advanced RoboticSystems vol 5 no 1 pp 1ndash18 2008
[2] B Chandrasekaran and J M Conrad ldquoHuman-robot collabo-ration a surveyrdquo in Proceedings of the IEEE SoutheastCon 2015pp 1ndash8 April 2015
[3] J-M Lu and Y-L Hsu ldquoTelepresence robots for medicaland homecare applicationsrdquo in Contemporary Issues in SystemsScience and Engineering M Zhou H-X Li and M WeijnenEds chapter 21 pp 725ndash735 JohnWiley amp Sons Hoboken NJUSA 2015
[4] T Arai R Kato and M Fujita ldquoAssessment of operator stressinduced by robot collaboration in assemblyrdquo CIRP AnnalsmdashManufacturing Technology vol 59 no 1 pp 5ndash8 2010
[5] A Bechar and Y Edan ldquoHuman-robot collaboration forimproved target recognition of agricultural robotsrdquo IndustrialRobot vol 30 no 5 pp 432ndash436 2003
[6] Top 10 emerging technologies of 2015 httpsagendaweforumorg
[7] B Matthias S Kock H Jerregard M Kallman and I Lund-berg ldquoSafety of collaborative industrial robots certificationpossibilities for a collaborative assembly robot conceptrdquo inProceedings of the IEEE International Symposium on Assemblyand Manufacturing (ISAM rsquo11) pp 1ndash6 Tampere Finland May2011
[8] V Morabito ldquoBig data driven business modelsrdquo in Big Data andAnalytics pp 65ndash80 Springer 2015
[9] B Scassellati and K M Tsui ldquoCo-robots humans and robotsoperating as partnersrdquo in Handbook of Science and TechnologyConvergence pp 1ndash10 Springer 2015
[10] W He A O David Z Yin and C Sun ldquoNeural networkcontrol of a robotic manipulator with input deadzone and
output constraintrdquo IEEE Transactions on Systems Man andCybernetics Systems 2015
[11] W He Y Chen and Z Yin ldquoAdaptive neural network controlof an uncertain robot with full-state constraintsrdquo IEEE Transac-tions on Cybernetics vol 46 no 3 pp 620ndash629 2016
[12] C Reardon H Tan B Kannan and L DeRose ldquoTowardssafe robot-human collaboration systems using human posedetectionrdquo in Proceedings of the IEEE International Conferenceon Technologies for Practical robot Applications (TePRA rsquo15) pp1ndash6 Woburn Mass USA May 2015
[13] W He Y Dong and C Sun ldquoAdaptive neural impedancecontrol of a robotic manipulator with input saturationrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 46no 3 pp 334ndash344 2016
[14] K Kronander and A Billard ldquoLearning compliant manipula-tion through kinesthetic and tactile human-robot interactionrdquoIEEE Transactions on Haptics vol 7 no 3 pp 367ndash380 2014
[15] L Peternel T Petric E Oztop and J Babic ldquoTeaching robots tocooperate with humans in dynamic manipulation tasks basedon multi-modal human-in-the-loop approachrdquo AutonomousRobots vol 36 no 1-2 pp 123ndash136 2014
[16] L D Rozo S Calinon D Caldwell P Jimenez and C TorrasldquoLearning collaborative impedance-based robot behaviorsrdquo inProceedings of the 27th AAAI Conference on Artificial Intelli-gence Bellevue Wash USA July 2013
[17] Kuka lbr robot profile March 2015 httpwwwkuka-roboticscomenproductsindustrial robotssensitiv
[18] Barrett wam arm profile 2015 httpwwwbarrettcomrobotproducts-armhtm
[19] A Jafari N G Tsagarakis and D G Caldwell ldquoAwAS-II a newactuator with adjustable stiffness based on the novel principle ofadaptable pivot point and variable lever ratiordquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo11) pp 4638ndash4643 Shanghai China May 2011
[20] M Grebenstein A Albu-Schaffer T Bahls et al ldquoThe DLRhand arm systemrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 3175ndash3182 Shanghai China May 2011
[21] S P Chan and H C Liaw ldquoGeneralized impedance controlof robot for assembly tasks requiring compliant manipulationrdquoIEEE Transactions on Industrial Electronics vol 43 no 4 pp453ndash461 1996
[22] J Buchli F Stulp E Theodorou and S Schaal ldquoLearningvariable impedance controlrdquo International Journal of RoboticsResearch vol 30 no 7 pp 820ndash833 2011
[23] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 Phuket Thailand December 2011
[24] A Ajoudani M Gabiccini N Tsagarakis A Albu-Schafferand A Bicchi ldquoTeleImpedance Exploring the role of common-mode and configuration- dependant stiffnessrdquo in Proceedingsof the 12th IEEE-RAS International Conference on HumanoidRobots Humanoids 2012 pp 363ndash369 Osaka Japan December2012
[25] N Hogan ldquoImpedance control an approach to manipulationpart IImdashimplementationrdquo Journal of Dynamic Systems Mea-surement and Control vol 107 no 1 pp 8ndash16 1985
[26] A Ajoudani N Tsagarakis and A Bicchi ldquoTele-impedanceteleoperation with impedance regulation using a body-machine
12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Discrete Dynamics in Nature and Society
Feedforward
Impedance
Robotdynamics
Plannedmovement
++
+
Actualmovement
P(k)
p p p
p pr pr
minus
Ff
Fb
Figure 9 Scheme of HRC control model The feedforward 119865119891
corresponds to the force of human and 119865119887is force feedback based
on PD impedance controller which is employed to regulate robotjoint or endpoint impedance
[54] demonstrated experimentally that the effect of stiffnessparameters is negligible Hence this model can be expressedas
119865119891= 119898 + 119888 (17)
where 119865119891is a force vector between the human and robot119898 is
a virtual mass parameter 119888 is a virtual damping parameterand are respectively the velocity and accelerationvectors which can be derived from (16)
The torque input to the slave arm is produced by PDcontroller defined below in (18) which also employs a gravitycompensator 119865
119892 Consider
119865119887= 119863119887Δ + 119870
119887Δ119883 + 119865
119892 (18)
where 119863119887 119870119887are slave arm endpoint damping and stiffness
respectively The stiffness 119870119887is set in real time according to
the estimated stiffness at endpoint of the human operatorrsquoslimb and119863
119887is set proportional to119870
119887with a fixed ratio to be
specified by the designerThe endpoint force 119865
119887in Cartesian space needs to be
transformed to joint space by (19) in order to be implementedon the robot arm joint torque controller Consider
120591 = 119869119879
119865119887 (19)
where 120591 denotes robot joint torques 119865119887denotes robot end-
point force in Cartesian space and 119869 represents robot armJacobian Therefore the stiffness in joint space of the slaverobot can be derived from the stiffness in Cartesian spaceaccording to
119870119902
119903asymp 119869119879
119870ℎ119869 (20)
where 119870119902119903denotes robot joint stiffness and 119870
ℎis human arm
endpoint stiffness The model (shown in Figure 9) of forceand impedance enables simulation of a movement of the armor leg along a planned trajectory 119902(119896) in an environmentcharacterized by force and impedance First the torque iscomputed using (19) and (18) then impedance is used tocompute the effect of the feedback control item on human-robot interactions
3 Experimental Setup
The experimental platform is a dual-arm Baxter robot whichconsists of a torso 2-degree-of-freedom (2-DOF) head dualarms with 7 DOFs integrated cameras sonar torque sensorsencoders and direct programming access via Robot Operat-ing System (ROS) interface Each joint of Baxter robot arm isdriven by 7 serial elastic actuators (SEA) with intrinsic safetyMoreover joint stiffness and damping can be modified underBaxter robot torque control mode which is simplified as PDimpedance control law in this paper
To verify the efficiency of proposed HRC methodhuman-robot telemanipulation for moving objects (shown inFigure 10) is implemented with comparative tests under twodifferent scenarios that is low stiffness mode and humanoperated mode The robot left arm serves as slave armwhich is guided by human operatorrsquos limb endpoint Thehuman left arm serves as master arm As for the Baxterrobot simulator setup first Baxter simulator is launchedaccording to Baxter robot wiki guideline [57] Then inserta book shelf from gazebo environment library and 4 brickswhich are configured as shown in Figure 10 Human operatormoves Baxter left arm via visual feedback and adapts armpose to move the bricks to enable Baxter robot to imitatehuman motor adaptive behaviours by means of UDP com-munications between host computer and Baxter simulator Inaddition Baxter robot initial stiffness is set with a small value(Left S0 30 Left S1 30 Left E0 30 Left E1 20 Left W0 20Left W1 15 Left W2 10 unit Nmsdotrad)
4 Results
As indicated in Section 3 the experiment is based on twoscenarios as shown in Figure 11 Baxter motion is regulatedby human operator in real time The human operatorrsquos armis simplified as 7-DOF manipulator corresponding to Baxterrobot joints Meanwhile human hand posture is captured byKinect to control Baxter robot stiffness adaptations whichvary according to time of posture maintenance
Test I Human operator teleoperates Baxter robot usingKinect which extracts humanmotion regulations in real timeFirst the human operator guides Baxter to the book shelf andmake a precise positioning and calibration by visual feedbackSecond humanoperator employs pose 1 shown in Figure 11(a)to move the object but the object does not move at allNaturally human operator changes his arm configuration topose 2 and moves the object again and still cannot movethe object As indicated in Figure 13 Baxter robot can adaptits stiffness using different pose as well however the initialstiffness set on Baxter robot is too small to move the objectwith two poses
Test II As shown in Figure 13(b) human operator interactswith Baxter robot with human motion intention detectionbased on Kinect Human operator hand gesture is employedto control Baxter robot stiffness variations as shown inFigure 12 Generally fist means human operator strengthensmuscles to increase force to fulfil a specific task Thumb-up
Discrete Dynamics in Nature and Society 9
Brick5kg
Figure 10 Experimental setup for human and Baxter robot collaboration intuitively and compliantly in teleoperation scenario The virtualBaxter robot environment is based on ROS and gazebo [58] Four bricks are put on the shelf and their total weights are modified to 5 kgBaxter robot is supposed to move the four bricks with different arm configurations
(a) Object moving with pose 1 (b) Object moving with pose 2
Figure 11 Scheme of Baxter robot moving an object by two different poses The red arrows denote the force directions of the two posesrespectively
t
Stiff
ness
inde
x
0
1
Figure 12 Baxter robot stiffness control by human hand gestures fist increasing stiffness with a threshold thumb-up holding currentstiffness and finger spread decreasing stiffness
10 Discrete Dynamics in Nature and Society
02
minus02
06
1
5
10
15
20
40
60
Endp
oint
stiff
ness
(Nm
)En
dpoi
nt d
ispla
cem
ent (
m)
Start Pose 1 Pose 2 End
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(a) Object moving test I
Endp
oint
stiff
ness
(Nm
)
02
minus02
06
1
Endp
oint
disp
lace
men
t (m
)
Pose 1 Pose 2
5
15
25
35
45
40
80
120
EndStart
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(b) Object moving test II
Figure 13 Object moving test results (a) object moving without human postural stiffness index transfer (b) object moving with humanpostural stiffness transfer Both the two tests are composed of four steps start to move Baxter robot endpoint to the target move objects usingpose 1 and move objects with pose 2 and finally finish moving objects The predominated Baxter robot joint S0 is selected to track the torquevariations during the tests
denotes that the Baxter robot stiffness is sufficient to completetasks for example moving objects in this test We utilisefinger spread pose to present that Baxter robot needs todecrease stiffness to return compliant In this way Baxter canunderstand human motion intention simply but stably andefficiently
In this test human operator replicates motion that hasbeen done in test I During the first pose inmoving the objectBaxter can not complete the task while human operatorincreases Baxter stiffness via hand gesture However Baxter
can not make it as well In the second pose in moving objecthuman uses the same way to control Baxter motion andstiffness as well and Baxter can finish the task easily Whenthe task is completed human operator spreads fingers tomake Baxter robot return compliant
5 Conclusion
In this paper we have developed a natural interface indiscrete-time for human-robot collaboration by making
Discrete Dynamics in Nature and Society 11
robot understand human motion intention especially forstiffness adaptation instead of using EMG signals which needto be detected by adhering electrodes on the skin In additionwe used a geometry vector approach to extract human arm7-DOF Jacobian for stiffness transformation from Cartesianspace to joint space in real time A biomimetic controller isemployed for human and robot motion regulation transferExperiment validated that the proposed approach to HRCwas intuitive compliant and efficient It may have additionalapplications in various HRC scenarios
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported in part by State Key Laboratoryof Robotics and System (HIT) Grant SKLRS-2014-MS-05SKLRS201405B National Natural Science Foundation ofChina (NSFC) Grant 61273339 Heilongjiang Provincial Nat-ural Science Foundation of China Grants QC2014C072 andF2015010 The authors would like to acknowledge supportfromMr Chao Wang in the experiment implementation
References
[1] S A GreenM Billinghurst X Chen and J G Chase ldquoHuman-robot collaboration a literature review and augmented realityapproach in designrdquo International Journal of Advanced RoboticSystems vol 5 no 1 pp 1ndash18 2008
[2] B Chandrasekaran and J M Conrad ldquoHuman-robot collabo-ration a surveyrdquo in Proceedings of the IEEE SoutheastCon 2015pp 1ndash8 April 2015
[3] J-M Lu and Y-L Hsu ldquoTelepresence robots for medicaland homecare applicationsrdquo in Contemporary Issues in SystemsScience and Engineering M Zhou H-X Li and M WeijnenEds chapter 21 pp 725ndash735 JohnWiley amp Sons Hoboken NJUSA 2015
[4] T Arai R Kato and M Fujita ldquoAssessment of operator stressinduced by robot collaboration in assemblyrdquo CIRP AnnalsmdashManufacturing Technology vol 59 no 1 pp 5ndash8 2010
[5] A Bechar and Y Edan ldquoHuman-robot collaboration forimproved target recognition of agricultural robotsrdquo IndustrialRobot vol 30 no 5 pp 432ndash436 2003
[6] Top 10 emerging technologies of 2015 httpsagendaweforumorg
[7] B Matthias S Kock H Jerregard M Kallman and I Lund-berg ldquoSafety of collaborative industrial robots certificationpossibilities for a collaborative assembly robot conceptrdquo inProceedings of the IEEE International Symposium on Assemblyand Manufacturing (ISAM rsquo11) pp 1ndash6 Tampere Finland May2011
[8] V Morabito ldquoBig data driven business modelsrdquo in Big Data andAnalytics pp 65ndash80 Springer 2015
[9] B Scassellati and K M Tsui ldquoCo-robots humans and robotsoperating as partnersrdquo in Handbook of Science and TechnologyConvergence pp 1ndash10 Springer 2015
[10] W He A O David Z Yin and C Sun ldquoNeural networkcontrol of a robotic manipulator with input deadzone and
output constraintrdquo IEEE Transactions on Systems Man andCybernetics Systems 2015
[11] W He Y Chen and Z Yin ldquoAdaptive neural network controlof an uncertain robot with full-state constraintsrdquo IEEE Transac-tions on Cybernetics vol 46 no 3 pp 620ndash629 2016
[12] C Reardon H Tan B Kannan and L DeRose ldquoTowardssafe robot-human collaboration systems using human posedetectionrdquo in Proceedings of the IEEE International Conferenceon Technologies for Practical robot Applications (TePRA rsquo15) pp1ndash6 Woburn Mass USA May 2015
[13] W He Y Dong and C Sun ldquoAdaptive neural impedancecontrol of a robotic manipulator with input saturationrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 46no 3 pp 334ndash344 2016
[14] K Kronander and A Billard ldquoLearning compliant manipula-tion through kinesthetic and tactile human-robot interactionrdquoIEEE Transactions on Haptics vol 7 no 3 pp 367ndash380 2014
[15] L Peternel T Petric E Oztop and J Babic ldquoTeaching robots tocooperate with humans in dynamic manipulation tasks basedon multi-modal human-in-the-loop approachrdquo AutonomousRobots vol 36 no 1-2 pp 123ndash136 2014
[16] L D Rozo S Calinon D Caldwell P Jimenez and C TorrasldquoLearning collaborative impedance-based robot behaviorsrdquo inProceedings of the 27th AAAI Conference on Artificial Intelli-gence Bellevue Wash USA July 2013
[17] Kuka lbr robot profile March 2015 httpwwwkuka-roboticscomenproductsindustrial robotssensitiv
[18] Barrett wam arm profile 2015 httpwwwbarrettcomrobotproducts-armhtm
[19] A Jafari N G Tsagarakis and D G Caldwell ldquoAwAS-II a newactuator with adjustable stiffness based on the novel principle ofadaptable pivot point and variable lever ratiordquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo11) pp 4638ndash4643 Shanghai China May 2011
[20] M Grebenstein A Albu-Schaffer T Bahls et al ldquoThe DLRhand arm systemrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 3175ndash3182 Shanghai China May 2011
[21] S P Chan and H C Liaw ldquoGeneralized impedance controlof robot for assembly tasks requiring compliant manipulationrdquoIEEE Transactions on Industrial Electronics vol 43 no 4 pp453ndash461 1996
[22] J Buchli F Stulp E Theodorou and S Schaal ldquoLearningvariable impedance controlrdquo International Journal of RoboticsResearch vol 30 no 7 pp 820ndash833 2011
[23] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 Phuket Thailand December 2011
[24] A Ajoudani M Gabiccini N Tsagarakis A Albu-Schafferand A Bicchi ldquoTeleImpedance Exploring the role of common-mode and configuration- dependant stiffnessrdquo in Proceedingsof the 12th IEEE-RAS International Conference on HumanoidRobots Humanoids 2012 pp 363ndash369 Osaka Japan December2012
[25] N Hogan ldquoImpedance control an approach to manipulationpart IImdashimplementationrdquo Journal of Dynamic Systems Mea-surement and Control vol 107 no 1 pp 8ndash16 1985
[26] A Ajoudani N Tsagarakis and A Bicchi ldquoTele-impedanceteleoperation with impedance regulation using a body-machine
12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 9
Brick5kg
Figure 10 Experimental setup for human and Baxter robot collaboration intuitively and compliantly in teleoperation scenario The virtualBaxter robot environment is based on ROS and gazebo [58] Four bricks are put on the shelf and their total weights are modified to 5 kgBaxter robot is supposed to move the four bricks with different arm configurations
(a) Object moving with pose 1 (b) Object moving with pose 2
Figure 11 Scheme of Baxter robot moving an object by two different poses The red arrows denote the force directions of the two posesrespectively
t
Stiff
ness
inde
x
0
1
Figure 12 Baxter robot stiffness control by human hand gestures fist increasing stiffness with a threshold thumb-up holding currentstiffness and finger spread decreasing stiffness
10 Discrete Dynamics in Nature and Society
02
minus02
06
1
5
10
15
20
40
60
Endp
oint
stiff
ness
(Nm
)En
dpoi
nt d
ispla
cem
ent (
m)
Start Pose 1 Pose 2 End
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(a) Object moving test I
Endp
oint
stiff
ness
(Nm
)
02
minus02
06
1
Endp
oint
disp
lace
men
t (m
)
Pose 1 Pose 2
5
15
25
35
45
40
80
120
EndStart
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(b) Object moving test II
Figure 13 Object moving test results (a) object moving without human postural stiffness index transfer (b) object moving with humanpostural stiffness transfer Both the two tests are composed of four steps start to move Baxter robot endpoint to the target move objects usingpose 1 and move objects with pose 2 and finally finish moving objects The predominated Baxter robot joint S0 is selected to track the torquevariations during the tests
denotes that the Baxter robot stiffness is sufficient to completetasks for example moving objects in this test We utilisefinger spread pose to present that Baxter robot needs todecrease stiffness to return compliant In this way Baxter canunderstand human motion intention simply but stably andefficiently
In this test human operator replicates motion that hasbeen done in test I During the first pose inmoving the objectBaxter can not complete the task while human operatorincreases Baxter stiffness via hand gesture However Baxter
can not make it as well In the second pose in moving objecthuman uses the same way to control Baxter motion andstiffness as well and Baxter can finish the task easily Whenthe task is completed human operator spreads fingers tomake Baxter robot return compliant
5 Conclusion
In this paper we have developed a natural interface indiscrete-time for human-robot collaboration by making
Discrete Dynamics in Nature and Society 11
robot understand human motion intention especially forstiffness adaptation instead of using EMG signals which needto be detected by adhering electrodes on the skin In additionwe used a geometry vector approach to extract human arm7-DOF Jacobian for stiffness transformation from Cartesianspace to joint space in real time A biomimetic controller isemployed for human and robot motion regulation transferExperiment validated that the proposed approach to HRCwas intuitive compliant and efficient It may have additionalapplications in various HRC scenarios
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported in part by State Key Laboratoryof Robotics and System (HIT) Grant SKLRS-2014-MS-05SKLRS201405B National Natural Science Foundation ofChina (NSFC) Grant 61273339 Heilongjiang Provincial Nat-ural Science Foundation of China Grants QC2014C072 andF2015010 The authors would like to acknowledge supportfromMr Chao Wang in the experiment implementation
References
[1] S A GreenM Billinghurst X Chen and J G Chase ldquoHuman-robot collaboration a literature review and augmented realityapproach in designrdquo International Journal of Advanced RoboticSystems vol 5 no 1 pp 1ndash18 2008
[2] B Chandrasekaran and J M Conrad ldquoHuman-robot collabo-ration a surveyrdquo in Proceedings of the IEEE SoutheastCon 2015pp 1ndash8 April 2015
[3] J-M Lu and Y-L Hsu ldquoTelepresence robots for medicaland homecare applicationsrdquo in Contemporary Issues in SystemsScience and Engineering M Zhou H-X Li and M WeijnenEds chapter 21 pp 725ndash735 JohnWiley amp Sons Hoboken NJUSA 2015
[4] T Arai R Kato and M Fujita ldquoAssessment of operator stressinduced by robot collaboration in assemblyrdquo CIRP AnnalsmdashManufacturing Technology vol 59 no 1 pp 5ndash8 2010
[5] A Bechar and Y Edan ldquoHuman-robot collaboration forimproved target recognition of agricultural robotsrdquo IndustrialRobot vol 30 no 5 pp 432ndash436 2003
[6] Top 10 emerging technologies of 2015 httpsagendaweforumorg
[7] B Matthias S Kock H Jerregard M Kallman and I Lund-berg ldquoSafety of collaborative industrial robots certificationpossibilities for a collaborative assembly robot conceptrdquo inProceedings of the IEEE International Symposium on Assemblyand Manufacturing (ISAM rsquo11) pp 1ndash6 Tampere Finland May2011
[8] V Morabito ldquoBig data driven business modelsrdquo in Big Data andAnalytics pp 65ndash80 Springer 2015
[9] B Scassellati and K M Tsui ldquoCo-robots humans and robotsoperating as partnersrdquo in Handbook of Science and TechnologyConvergence pp 1ndash10 Springer 2015
[10] W He A O David Z Yin and C Sun ldquoNeural networkcontrol of a robotic manipulator with input deadzone and
output constraintrdquo IEEE Transactions on Systems Man andCybernetics Systems 2015
[11] W He Y Chen and Z Yin ldquoAdaptive neural network controlof an uncertain robot with full-state constraintsrdquo IEEE Transac-tions on Cybernetics vol 46 no 3 pp 620ndash629 2016
[12] C Reardon H Tan B Kannan and L DeRose ldquoTowardssafe robot-human collaboration systems using human posedetectionrdquo in Proceedings of the IEEE International Conferenceon Technologies for Practical robot Applications (TePRA rsquo15) pp1ndash6 Woburn Mass USA May 2015
[13] W He Y Dong and C Sun ldquoAdaptive neural impedancecontrol of a robotic manipulator with input saturationrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 46no 3 pp 334ndash344 2016
[14] K Kronander and A Billard ldquoLearning compliant manipula-tion through kinesthetic and tactile human-robot interactionrdquoIEEE Transactions on Haptics vol 7 no 3 pp 367ndash380 2014
[15] L Peternel T Petric E Oztop and J Babic ldquoTeaching robots tocooperate with humans in dynamic manipulation tasks basedon multi-modal human-in-the-loop approachrdquo AutonomousRobots vol 36 no 1-2 pp 123ndash136 2014
[16] L D Rozo S Calinon D Caldwell P Jimenez and C TorrasldquoLearning collaborative impedance-based robot behaviorsrdquo inProceedings of the 27th AAAI Conference on Artificial Intelli-gence Bellevue Wash USA July 2013
[17] Kuka lbr robot profile March 2015 httpwwwkuka-roboticscomenproductsindustrial robotssensitiv
[18] Barrett wam arm profile 2015 httpwwwbarrettcomrobotproducts-armhtm
[19] A Jafari N G Tsagarakis and D G Caldwell ldquoAwAS-II a newactuator with adjustable stiffness based on the novel principle ofadaptable pivot point and variable lever ratiordquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo11) pp 4638ndash4643 Shanghai China May 2011
[20] M Grebenstein A Albu-Schaffer T Bahls et al ldquoThe DLRhand arm systemrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 3175ndash3182 Shanghai China May 2011
[21] S P Chan and H C Liaw ldquoGeneralized impedance controlof robot for assembly tasks requiring compliant manipulationrdquoIEEE Transactions on Industrial Electronics vol 43 no 4 pp453ndash461 1996
[22] J Buchli F Stulp E Theodorou and S Schaal ldquoLearningvariable impedance controlrdquo International Journal of RoboticsResearch vol 30 no 7 pp 820ndash833 2011
[23] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 Phuket Thailand December 2011
[24] A Ajoudani M Gabiccini N Tsagarakis A Albu-Schafferand A Bicchi ldquoTeleImpedance Exploring the role of common-mode and configuration- dependant stiffnessrdquo in Proceedingsof the 12th IEEE-RAS International Conference on HumanoidRobots Humanoids 2012 pp 363ndash369 Osaka Japan December2012
[25] N Hogan ldquoImpedance control an approach to manipulationpart IImdashimplementationrdquo Journal of Dynamic Systems Mea-surement and Control vol 107 no 1 pp 8ndash16 1985
[26] A Ajoudani N Tsagarakis and A Bicchi ldquoTele-impedanceteleoperation with impedance regulation using a body-machine
12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Discrete Dynamics in Nature and Society
02
minus02
06
1
5
10
15
20
40
60
Endp
oint
stiff
ness
(Nm
)En
dpoi
nt d
ispla
cem
ent (
m)
Start Pose 1 Pose 2 End
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(a) Object moving test I
Endp
oint
stiff
ness
(Nm
)
02
minus02
06
1
Endp
oint
disp
lace
men
t (m
)
Pose 1 Pose 2
5
15
25
35
45
40
80
120
EndStart
X
Y
Z
5 10 15 20 250t (s)
Join
t S0
torq
ue (N
middotm)
(b) Object moving test II
Figure 13 Object moving test results (a) object moving without human postural stiffness index transfer (b) object moving with humanpostural stiffness transfer Both the two tests are composed of four steps start to move Baxter robot endpoint to the target move objects usingpose 1 and move objects with pose 2 and finally finish moving objects The predominated Baxter robot joint S0 is selected to track the torquevariations during the tests
denotes that the Baxter robot stiffness is sufficient to completetasks for example moving objects in this test We utilisefinger spread pose to present that Baxter robot needs todecrease stiffness to return compliant In this way Baxter canunderstand human motion intention simply but stably andefficiently
In this test human operator replicates motion that hasbeen done in test I During the first pose inmoving the objectBaxter can not complete the task while human operatorincreases Baxter stiffness via hand gesture However Baxter
can not make it as well In the second pose in moving objecthuman uses the same way to control Baxter motion andstiffness as well and Baxter can finish the task easily Whenthe task is completed human operator spreads fingers tomake Baxter robot return compliant
5 Conclusion
In this paper we have developed a natural interface indiscrete-time for human-robot collaboration by making
Discrete Dynamics in Nature and Society 11
robot understand human motion intention especially forstiffness adaptation instead of using EMG signals which needto be detected by adhering electrodes on the skin In additionwe used a geometry vector approach to extract human arm7-DOF Jacobian for stiffness transformation from Cartesianspace to joint space in real time A biomimetic controller isemployed for human and robot motion regulation transferExperiment validated that the proposed approach to HRCwas intuitive compliant and efficient It may have additionalapplications in various HRC scenarios
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported in part by State Key Laboratoryof Robotics and System (HIT) Grant SKLRS-2014-MS-05SKLRS201405B National Natural Science Foundation ofChina (NSFC) Grant 61273339 Heilongjiang Provincial Nat-ural Science Foundation of China Grants QC2014C072 andF2015010 The authors would like to acknowledge supportfromMr Chao Wang in the experiment implementation
References
[1] S A GreenM Billinghurst X Chen and J G Chase ldquoHuman-robot collaboration a literature review and augmented realityapproach in designrdquo International Journal of Advanced RoboticSystems vol 5 no 1 pp 1ndash18 2008
[2] B Chandrasekaran and J M Conrad ldquoHuman-robot collabo-ration a surveyrdquo in Proceedings of the IEEE SoutheastCon 2015pp 1ndash8 April 2015
[3] J-M Lu and Y-L Hsu ldquoTelepresence robots for medicaland homecare applicationsrdquo in Contemporary Issues in SystemsScience and Engineering M Zhou H-X Li and M WeijnenEds chapter 21 pp 725ndash735 JohnWiley amp Sons Hoboken NJUSA 2015
[4] T Arai R Kato and M Fujita ldquoAssessment of operator stressinduced by robot collaboration in assemblyrdquo CIRP AnnalsmdashManufacturing Technology vol 59 no 1 pp 5ndash8 2010
[5] A Bechar and Y Edan ldquoHuman-robot collaboration forimproved target recognition of agricultural robotsrdquo IndustrialRobot vol 30 no 5 pp 432ndash436 2003
[6] Top 10 emerging technologies of 2015 httpsagendaweforumorg
[7] B Matthias S Kock H Jerregard M Kallman and I Lund-berg ldquoSafety of collaborative industrial robots certificationpossibilities for a collaborative assembly robot conceptrdquo inProceedings of the IEEE International Symposium on Assemblyand Manufacturing (ISAM rsquo11) pp 1ndash6 Tampere Finland May2011
[8] V Morabito ldquoBig data driven business modelsrdquo in Big Data andAnalytics pp 65ndash80 Springer 2015
[9] B Scassellati and K M Tsui ldquoCo-robots humans and robotsoperating as partnersrdquo in Handbook of Science and TechnologyConvergence pp 1ndash10 Springer 2015
[10] W He A O David Z Yin and C Sun ldquoNeural networkcontrol of a robotic manipulator with input deadzone and
output constraintrdquo IEEE Transactions on Systems Man andCybernetics Systems 2015
[11] W He Y Chen and Z Yin ldquoAdaptive neural network controlof an uncertain robot with full-state constraintsrdquo IEEE Transac-tions on Cybernetics vol 46 no 3 pp 620ndash629 2016
[12] C Reardon H Tan B Kannan and L DeRose ldquoTowardssafe robot-human collaboration systems using human posedetectionrdquo in Proceedings of the IEEE International Conferenceon Technologies for Practical robot Applications (TePRA rsquo15) pp1ndash6 Woburn Mass USA May 2015
[13] W He Y Dong and C Sun ldquoAdaptive neural impedancecontrol of a robotic manipulator with input saturationrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 46no 3 pp 334ndash344 2016
[14] K Kronander and A Billard ldquoLearning compliant manipula-tion through kinesthetic and tactile human-robot interactionrdquoIEEE Transactions on Haptics vol 7 no 3 pp 367ndash380 2014
[15] L Peternel T Petric E Oztop and J Babic ldquoTeaching robots tocooperate with humans in dynamic manipulation tasks basedon multi-modal human-in-the-loop approachrdquo AutonomousRobots vol 36 no 1-2 pp 123ndash136 2014
[16] L D Rozo S Calinon D Caldwell P Jimenez and C TorrasldquoLearning collaborative impedance-based robot behaviorsrdquo inProceedings of the 27th AAAI Conference on Artificial Intelli-gence Bellevue Wash USA July 2013
[17] Kuka lbr robot profile March 2015 httpwwwkuka-roboticscomenproductsindustrial robotssensitiv
[18] Barrett wam arm profile 2015 httpwwwbarrettcomrobotproducts-armhtm
[19] A Jafari N G Tsagarakis and D G Caldwell ldquoAwAS-II a newactuator with adjustable stiffness based on the novel principle ofadaptable pivot point and variable lever ratiordquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo11) pp 4638ndash4643 Shanghai China May 2011
[20] M Grebenstein A Albu-Schaffer T Bahls et al ldquoThe DLRhand arm systemrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 3175ndash3182 Shanghai China May 2011
[21] S P Chan and H C Liaw ldquoGeneralized impedance controlof robot for assembly tasks requiring compliant manipulationrdquoIEEE Transactions on Industrial Electronics vol 43 no 4 pp453ndash461 1996
[22] J Buchli F Stulp E Theodorou and S Schaal ldquoLearningvariable impedance controlrdquo International Journal of RoboticsResearch vol 30 no 7 pp 820ndash833 2011
[23] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 Phuket Thailand December 2011
[24] A Ajoudani M Gabiccini N Tsagarakis A Albu-Schafferand A Bicchi ldquoTeleImpedance Exploring the role of common-mode and configuration- dependant stiffnessrdquo in Proceedingsof the 12th IEEE-RAS International Conference on HumanoidRobots Humanoids 2012 pp 363ndash369 Osaka Japan December2012
[25] N Hogan ldquoImpedance control an approach to manipulationpart IImdashimplementationrdquo Journal of Dynamic Systems Mea-surement and Control vol 107 no 1 pp 8ndash16 1985
[26] A Ajoudani N Tsagarakis and A Bicchi ldquoTele-impedanceteleoperation with impedance regulation using a body-machine
12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 11
robot understand human motion intention especially forstiffness adaptation instead of using EMG signals which needto be detected by adhering electrodes on the skin In additionwe used a geometry vector approach to extract human arm7-DOF Jacobian for stiffness transformation from Cartesianspace to joint space in real time A biomimetic controller isemployed for human and robot motion regulation transferExperiment validated that the proposed approach to HRCwas intuitive compliant and efficient It may have additionalapplications in various HRC scenarios
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work is supported in part by State Key Laboratoryof Robotics and System (HIT) Grant SKLRS-2014-MS-05SKLRS201405B National Natural Science Foundation ofChina (NSFC) Grant 61273339 Heilongjiang Provincial Nat-ural Science Foundation of China Grants QC2014C072 andF2015010 The authors would like to acknowledge supportfromMr Chao Wang in the experiment implementation
References
[1] S A GreenM Billinghurst X Chen and J G Chase ldquoHuman-robot collaboration a literature review and augmented realityapproach in designrdquo International Journal of Advanced RoboticSystems vol 5 no 1 pp 1ndash18 2008
[2] B Chandrasekaran and J M Conrad ldquoHuman-robot collabo-ration a surveyrdquo in Proceedings of the IEEE SoutheastCon 2015pp 1ndash8 April 2015
[3] J-M Lu and Y-L Hsu ldquoTelepresence robots for medicaland homecare applicationsrdquo in Contemporary Issues in SystemsScience and Engineering M Zhou H-X Li and M WeijnenEds chapter 21 pp 725ndash735 JohnWiley amp Sons Hoboken NJUSA 2015
[4] T Arai R Kato and M Fujita ldquoAssessment of operator stressinduced by robot collaboration in assemblyrdquo CIRP AnnalsmdashManufacturing Technology vol 59 no 1 pp 5ndash8 2010
[5] A Bechar and Y Edan ldquoHuman-robot collaboration forimproved target recognition of agricultural robotsrdquo IndustrialRobot vol 30 no 5 pp 432ndash436 2003
[6] Top 10 emerging technologies of 2015 httpsagendaweforumorg
[7] B Matthias S Kock H Jerregard M Kallman and I Lund-berg ldquoSafety of collaborative industrial robots certificationpossibilities for a collaborative assembly robot conceptrdquo inProceedings of the IEEE International Symposium on Assemblyand Manufacturing (ISAM rsquo11) pp 1ndash6 Tampere Finland May2011
[8] V Morabito ldquoBig data driven business modelsrdquo in Big Data andAnalytics pp 65ndash80 Springer 2015
[9] B Scassellati and K M Tsui ldquoCo-robots humans and robotsoperating as partnersrdquo in Handbook of Science and TechnologyConvergence pp 1ndash10 Springer 2015
[10] W He A O David Z Yin and C Sun ldquoNeural networkcontrol of a robotic manipulator with input deadzone and
output constraintrdquo IEEE Transactions on Systems Man andCybernetics Systems 2015
[11] W He Y Chen and Z Yin ldquoAdaptive neural network controlof an uncertain robot with full-state constraintsrdquo IEEE Transac-tions on Cybernetics vol 46 no 3 pp 620ndash629 2016
[12] C Reardon H Tan B Kannan and L DeRose ldquoTowardssafe robot-human collaboration systems using human posedetectionrdquo in Proceedings of the IEEE International Conferenceon Technologies for Practical robot Applications (TePRA rsquo15) pp1ndash6 Woburn Mass USA May 2015
[13] W He Y Dong and C Sun ldquoAdaptive neural impedancecontrol of a robotic manipulator with input saturationrdquo IEEETransactions on Systems Man and Cybernetics Systems vol 46no 3 pp 334ndash344 2016
[14] K Kronander and A Billard ldquoLearning compliant manipula-tion through kinesthetic and tactile human-robot interactionrdquoIEEE Transactions on Haptics vol 7 no 3 pp 367ndash380 2014
[15] L Peternel T Petric E Oztop and J Babic ldquoTeaching robots tocooperate with humans in dynamic manipulation tasks basedon multi-modal human-in-the-loop approachrdquo AutonomousRobots vol 36 no 1-2 pp 123ndash136 2014
[16] L D Rozo S Calinon D Caldwell P Jimenez and C TorrasldquoLearning collaborative impedance-based robot behaviorsrdquo inProceedings of the 27th AAAI Conference on Artificial Intelli-gence Bellevue Wash USA July 2013
[17] Kuka lbr robot profile March 2015 httpwwwkuka-roboticscomenproductsindustrial robotssensitiv
[18] Barrett wam arm profile 2015 httpwwwbarrettcomrobotproducts-armhtm
[19] A Jafari N G Tsagarakis and D G Caldwell ldquoAwAS-II a newactuator with adjustable stiffness based on the novel principle ofadaptable pivot point and variable lever ratiordquo in Proceedings ofthe IEEE International Conference on Robotics and Automation(ICRA rsquo11) pp 4638ndash4643 Shanghai China May 2011
[20] M Grebenstein A Albu-Schaffer T Bahls et al ldquoThe DLRhand arm systemrdquo in Proceedings of the IEEE InternationalConference on Robotics and Automation (ICRA rsquo11) pp 3175ndash3182 Shanghai China May 2011
[21] S P Chan and H C Liaw ldquoGeneralized impedance controlof robot for assembly tasks requiring compliant manipulationrdquoIEEE Transactions on Industrial Electronics vol 43 no 4 pp453ndash461 1996
[22] J Buchli F Stulp E Theodorou and S Schaal ldquoLearningvariable impedance controlrdquo International Journal of RoboticsResearch vol 30 no 7 pp 820ndash833 2011
[23] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 Phuket Thailand December 2011
[24] A Ajoudani M Gabiccini N Tsagarakis A Albu-Schafferand A Bicchi ldquoTeleImpedance Exploring the role of common-mode and configuration- dependant stiffnessrdquo in Proceedingsof the 12th IEEE-RAS International Conference on HumanoidRobots Humanoids 2012 pp 363ndash369 Osaka Japan December2012
[25] N Hogan ldquoImpedance control an approach to manipulationpart IImdashimplementationrdquo Journal of Dynamic Systems Mea-surement and Control vol 107 no 1 pp 8ndash16 1985
[26] A Ajoudani N Tsagarakis and A Bicchi ldquoTele-impedanceteleoperation with impedance regulation using a body-machine
12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Discrete Dynamics in Nature and Society
interfacerdquoThe International Journal of Robotics Research vol 31no 13 pp 1642ndash1655 2012
[27] A Ajoudani S B Godfrey M Bianchi et al ldquoExploringteleimpedance and tactile feedback for intuitive control of thePisaIIT SoftHandrdquo IEEE Transactions on Haptics vol 7 no 2pp 203ndash215 2014
[28] G Ganesh A Takagi R Osu T Yoshioka M Kawato and EBurdet ldquoTwo is better than one physical interactions improvemotor performance in humansrdquo Scientific Reports vol 4 article3824 2014
[29] T E Milner ldquoContribution of geometry and joint stiffness tomechanical stability of the human armrdquo Experimental BrainResearch vol 143 no 4 pp 515ndash519 2002
[30] E Burdet R Osu D W Franklin T E Milner and M KawatoldquoThe central nervous system stabilizes unstable dynamics bylearning optimal impedancerdquo Nature vol 414 no 6862 pp446ndash449 2001
[31] E Burdet G Ganesh C Yang and A Albu-Schaffer ldquoInter-action force impedance and trajectory adaptation by humansfor robotsrdquo in Experimental Robotics vol 79 of Springer Tractsin Advanced Robotics pp 331ndash345 Springer Berlin Germany2014
[32] C Yang G Ganesh S Haddadin S Parusel A Albu-Schaefferand E Burdet ldquoHuman-like adaptation of force and impedancein stable and unstable interactionsrdquo IEEE Transactions onRobotics vol 27 no 5 pp 918ndash930 2011
[33] A Ajoudani N G Tsagarakis and A Bicchi ldquoTele-impedancepreliminary results on measuring and replicating human armimpedance in tele operated robotsrdquo in Proceedings of the IEEEInternational Conference on Robotics and Biomimetics (ROBIOrsquo11) pp 216ndash222 IEEE Phuket Thailand December 2011
[34] D Gradolewski P M Tojza J Jaworski D Ambroziak GRedlarski andM Krawczuk ldquoArm EMGwavelet-based denois-ing systemrdquo inMechatronicsmdashIdeas for Industrial Application JAwrejcewicz R Szewczyk M Trojnacki and M KaliczynskaEds vol 317 of Advances in Intelligent Systems and Computingpp 289ndash296 Springer 2015
[35] MWehnerMan to Machine Applications in ElectromyographyInTech 2012
[36] A D Dragan S Bauman J Forlizzi and S S Srinivasa ldquoEffectsof robot motion on human-robot collaborationrdquo in Proceedingsof the 10th Annual ACMIEEE International Conference onHuman-Robot Interaction (HRI rsquo15) pp 51ndash58 ACM March2015
[37] K Saktaweekulkit and T Maneewarn ldquoMotion classificationusing IMU for human-robot interactionrdquo in Proceedings of theInternational Conference on Control Automation and Systems(ICCAS rsquo10) pp 2295ndash2299 IEEE Gyeonggi-do Republic ofKorea October 2010
[38] G Shi Y Zou W J Li Y Jin and P Guan ldquoTowards multi-classification of human motions using micro IMU and SVMtraining processrdquo in Advanced Materials Research vol 60 pp189ndash193 Trans Tech Publications 2009
[39] N Date H Yoshimoto D Arita and R-I Taniguchi ldquoReal-time human motion sensing based on vision-based inversekinematics for interactive applicationsrdquo in Proceedings of the17th International Conference on Pattern Recognition (ICPR rsquo04)vol 3 pp 318ndash321 IEEE Cambridge UK August 2004
[40] T Starner JWeaver and A Pentland ldquoReal-time american signlanguage recognition using desk and wearable computer basedvideordquo IEEE Transactions on Pattern Analysis and MachineIntelligence vol 20 no 12 pp 1371ndash1375 1998
[41] T Shanableh K Assaleh and M Al-Rousan ldquoSpatio-temporalfeature-extraction techniques for isolated gesture recognition inArabic sign languagerdquo IEEE Transactions on Systems Man andCybernetics Part B Cybernetics vol 37 no 3 pp 641ndash650 2007
[42] R Liang and M Ouhyoung ldquoA sign language recognitionsystem using hidden markov model and context sensitivesearchrdquo inProceedings of the ACMSymposium onVirtual RealitySoftware and Technology (VRST rsquo96) vol 96 pp 59ndash66 HongKong June 1996
[43] T Starner and A Pentland ldquoReal-time American sign languagerecognition from video using hidden Markov modelsrdquo inMotion-Based Recognition vol 9 of Computational Imaging andVision pp 227ndash243 Springer Amsterdam The Netherlands1997
[44] J Kim S Mastnik and E Andre ldquoEmg-based hand gesturerecognition for realtime biosignal interfacingrdquo in Proceedingsof the ACM 13th International Conference on Intelligent UserInterfaces (IUI rsquo08) pp 30ndash39 Canary Islands Spain January2008
[45] HMoradi and S Lee ldquoJoint limit analysis and elbowmovementminimization for redundant manipulators using closed formmethodrdquo in Advances in Intelligent Computing pp 423ndash432Springer Berlin Germany 2005
[46] C Fang and X Ding ldquoA set of basic movement primitives foranthropomorphic armsrdquo inProceedings of the 10th IEEE Interna-tional Conference on Mechatronics and Automation (ICMA rsquo13)pp 639ndash644 IEEE Takamatsu Japan August 2013
[47] H Reddivari C Yang Z Ju P Liang Z Li and B XuldquoTeleoperation control of Baxter robot using body motiontrackingrdquo in Proceedings of the International Conference onMultisensor Fusion and Information Integration for IntelligentSystems (MFI rsquo14) pp 1ndash6 Beijing China September 2014
[48] Z Zhang ldquoMicrosoft kinect sensor and its effectrdquo IEEE Multi-media vol 19 no 2 pp 4ndash10 2012
[49] M S Erden and A Billard ldquoEnd-point impedance measure-ments at human hand during interactive manual welding withrobotrdquo in Proceedings of the IEEE International Conference onRobotics and Automation (ICRA rsquo14) pp 126ndash133 IEEE HongKong June 2014
[50] A Ajoudani N G Tsagarakis and A Bicchi ldquoOn the roleof robot configuration in Cartesian stiffness controlrdquo in Pro-ceedings of the IEEE International Conference on Robotics andAutomation (ICRA rsquo15) pp 1010ndash1016 Seattle Wash USA May2015
[51] R Osu D W Franklin H Kato et al ldquoShort- and long-termchanges in joint co-contraction associated with motor learningas revealed from surface EMGrdquo Journal of Neurophysiology vol88 no 2 pp 991ndash1004 2002
[52] A Ajoudani C Fang N G Tsagarakis and A Bicchi ldquoAreduced-complexity description of arm endpoint stiffness withapplications to teleimpedance controlrdquo in Proceedings of theIEEERSJ International Conference on Intelligent Robots and Sys-tems (IROS rsquo15) pp 1017ndash1023 Hamburg Germany September2015
[53] T Flash and N Hogan ldquoThe coordination of arm movementsan experimentally confirmedmathematical modelrdquoThe Journalof Neuroscience vol 5 no 7 pp 1688ndash1703 1985
[54] K Kosuge and N Kazamura ldquoControl of a robot handlingan object in cooperation with a humanrdquo in Proceedings of the1997 6th IEEE International Workshop on Robot and HumanCommunication (RO-MAN rsquo97) pp 142ndash147 October 1997
Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 13
[55] R Ikeura H Monden and H Inooka ldquoCooperative motioncontrol of a robot and a humanrdquo in Proceedings of the 3rd IEEEInternational Workshop on Robot and Human Communication(RO-MAN rsquo94) pp 112ndash117 IEEE Nagoya Japan July 1994
[56] M M Rahman R Ikeura and K Mizutani ldquoInvestigatingthe impedance characteristic of human arm for developmentof robots to co-operate with human operatorsrdquo in Proceedingsof the IEEE International Conference on Systems Man andCybernetics (SMC rsquo99) vol 2 pp 676ndash681 Tokyo JapanOctober 1999
[57] Baxter simulator profileMarch 2015 httpsdkrethinkroboticscomwikiMain Page
[58] ROS Ros httpwikirosorg
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of


















