Research Article Adaptive Chaos Synchronization Control of...
11
Research Article Adaptive Chaos Synchronization Control of Nonlinear PMSM System Using Extended State Observer Zijing Cheng, 1 Guangyue Xue, 1 Chong Wang, 1 and Qiang Chen 2 1 Beijing Institute of Satellite Information Engineering, Beijing 100000, China 2 College of Information Engineering, Zhejiang University of Technology, Hangzhou 310023, China Correspondence should be addressed to Qiang Chen; [email protected] Received 12 July 2016; Revised 9 October 2016; Accepted 19 October 2016 Academic Editor: Uchechukwu E. Vincent Copyright © 2016 Zijing Cheng et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. is paper proposes an adaptive chaos synchronization control scheme for nonlinear permanent magnet synchronous motor (PMSM) systems by using extended state observer (ESO). Frist of all, a chaotic PMSM system is built through an affine transformation and a time scale transformation of the mathematical PMSM model. en, an adaptive sliding mode controller is developed based on the extended state observer to achieve the synchronization performance of two chaotic PMSM systems. Moreover, an adaptive parameter law of the control gain is designed to reduce the chattering problem existing in the traditional sliding mode control. Finally, the effectiveness of the proposed method is verified by simulation results. 1. Introduction e research on chaos control and synchronization has been widely studied since the chaos phenomenon was discovered [1–4]. As far as we know, chaos problem has been proved to exist in various practical systems. In the engineering field, chaos may cause irregular operation and affect the stability of the motors. Consequently, how to deal with the chaos problem in motors is still a significant problem. Lots of control and synchronization schemes have been represented since the discovery of chaotic impact on the motor control performance, such as finite-time control [5, 6], unidirectional correlation control [7], sliding mode control [8–11], linear control [12], dynamic surface control [13, 14], optimal control [15], and neural network control [16]. In [5], an adaptive finite-time control method is proposed for PMSM system to suppress the chaos behavior with parameter uncertainties. e uncertain parameters which are caused by external factors can be solved and the chaos in motor can be effectively stabilized. Reference [14] presents a dynamic surface control method based on neural network (NN) for PMSM system. e NN is adopted to approximate the system nonlinearities like disturbance and unknown parameters, and the control performance is guaranteed by using the designed control method. Most of the methods mentioned above can effectively eliminate the influence of chaos in PMSM, but the robustness of the system may be not guaranteed when the system has different initial conditions or disturbances. Due to the strong robustness and antidisturbance ability, sliding mode control (SMC) has been widely applied to the chaotic control in PMSM systems. In [8], a sliding mode control based on fuzzy neural network is investigated for the chaotic PMSM to suppress the chaos and improve the tracking control performance. Reference [9] proposes a high robust controller based on the traditional sliding mode control for PMSM with interference and uncertainties. e system has a good control performance and robustness by using the proposed method. But unfortunately, the robustness of SMC usually has a strong dependence on the control gain, and the control performance may become worse when the disturbance or uncertainties of the system are beyond of the control range. Consequently, in this paper, an adaptive law of the control gain is designed to solve this problem, and the extended state observer is employed to estimate the system uncertainties and unknown parameters. For the dual-motor cooperative control system Hindawi Publishing Corporation Mathematical Problems in Engineering Volume 2016, Article ID 3976586, 10 pages http://dx.doi.org/10.1155/2016/3976586
Transcript of Research Article Adaptive Chaos Synchronization Control of...

Research ArticleAdaptive Chaos Synchronization Control ofNonlinear PMSM System Using Extended State Observer
Zijing Cheng1 Guangyue Xue1 Chong Wang1 and Qiang Chen2
1Beijing Institute of Satellite Information Engineering Beijing 100000 China2College of Information Engineering Zhejiang University of Technology Hangzhou 310023 China
Correspondence should be addressed to Qiang Chen sdnjchqzjuteducn
Received 12 July 2016 Revised 9 October 2016 Accepted 19 October 2016
Academic Editor Uchechukwu E Vincent
Copyright copy 2016 Zijing Cheng et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper proposes an adaptive chaos synchronization control scheme for nonlinear permanent magnet synchronous motor(PMSM) systems by using extended state observer (ESO) Frist of all a chaotic PMSM system is built through an affinetransformation and a time scale transformation of the mathematical PMSM model Then an adaptive sliding mode controlleris developed based on the extended state observer to achieve the synchronization performance of two chaotic PMSM systemsMoreover an adaptive parameter law of the control gain is designed to reduce the chattering problem existing in the traditionalsliding mode control Finally the effectiveness of the proposed method is verified by simulation results
1 Introduction
The research on chaos control and synchronization has beenwidely studied since the chaos phenomenon was discovered[1ndash4] As far as we know chaos problem has been proved toexist in various practical systems In the engineering fieldchaos may cause irregular operation and affect the stabilityof the motors Consequently how to deal with the chaosproblem in motors is still a significant problem
Lots of control and synchronization schemes have beenrepresented since the discovery of chaotic impact on themotor control performance such as finite-time control [5 6]unidirectional correlation control [7] sliding mode control[8ndash11] linear control [12] dynamic surface control [13 14]optimal control [15] and neural network control [16] In[5] an adaptive finite-time control method is proposed forPMSM system to suppress the chaos behavior with parameteruncertainties The uncertain parameters which are caused byexternal factors can be solved and the chaos in motor canbe effectively stabilized Reference [14] presents a dynamicsurface control method based on neural network (NN) forPMSM systemTheNN is adopted to approximate the systemnonlinearities like disturbance andunknownparameters and
the control performance is guaranteed by using the designedcontrol method
Most of the methods mentioned above can effectivelyeliminate the influence of chaos in PMSM but the robustnessof the system may be not guaranteed when the system hasdifferent initial conditions or disturbances Due to the strongrobustness and antidisturbance ability sliding mode control(SMC) has been widely applied to the chaotic control inPMSM systems In [8] a sliding mode control based onfuzzy neural network is investigated for the chaotic PMSMto suppress the chaos and improve the tracking controlperformance Reference [9] proposes a high robust controllerbased on the traditional slidingmode control for PMSMwithinterference and uncertaintiesThe system has a good controlperformance and robustness by using the proposed methodBut unfortunately the robustness of SMCusually has a strongdependence on the control gain and the control performancemay become worse when the disturbance or uncertainties ofthe system are beyond of the control range Consequently inthis paper an adaptive law of the control gain is designedto solve this problem and the extended state observer isemployed to estimate the system uncertainties and unknownparameters For the dual-motor cooperative control system
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2016 Article ID 3976586 10 pageshttpdxdoiorg10115520163976586
2 Mathematical Problems in Engineering
with chaos the adaptive sliding mode control is investigatedto guarantee the synchronization control performance andthe chattering problem in traditional sliding mode control isalso improved
The rest of this paper is organized as follows The chaoticPMSMmodel and the extended state observer are derived inSections 2 and 3 respectively In Section 4 an adaptive slidingmode control scheme is developed for chaotic PMSM systemand the system analysis is provided Section 5 provides thesimulation results and the conclusion is given by Section 6
2 System Description
The mathematical model of a nonlinear PMSM system isexpressed as
119889119894119889119889119905 =(minus119877119904119894119889 + 119899119901119871119902120596119898119894119902 + 119906119889)
119871119889119889119894119902119889119905 =
(minus119877119904119894119902 minus 119899119901119871119889120596119898119894119889 minus 119899119901120595119891120596119898 + 119906119902)119871119902
119889120596119898119889119905 = 119899119901 [120595119891119894119902 + (119871119889 minus 119871119902) 119894119889119894119902] minus 119879119871 minus 119861120596119898119869
(1)
where 119894119889 119894119902 are the components of stator current in 119889-axisand 119902-axis 119906119889 119906119902 are the components of stator voltage in119889-axis and 119902-axis 119871119889 119871119902 are the equivalent inductances ofstator windings in 119889-axis and 119902-axis 120595119891 is the flux whichis generated by the permanent magnet 119877119904 is the statorresistance 119879119871 denotes the load torque 119869 is the rotary inertia119861 is the coefficient of friction 119899119901 represents the pole pairs ofmotor 120596119898 is the mechanical angular velocity of rotor
Define
119909 = [119894119889 119894119902 120596119898] = [119894119889 119902 119898] 119887 = 119871119902119871119889
119896 = 120573(119899119901120591120595119891)
120591 = 119871119889119877119904
120582 = [[[
120582119889 0 00 120582119902 00 0 120582120596
]]]= [[[[[
119887119896 0 00 119896 00 0 1
120591
]]]]]
(2)
and choose the affine transformation 119909 = 120582 and timescale transformation 119905 = 120591 for system (1) then (1) can betransformed into
119889119894119889119889119905 = minus119894119889 + 119898 119902 + 119889119889119894119902119889119905 = minus119894119902 minus 119898 119889 + 120574119898 + 119902
119889119898119889119905 = 120590 (119894119902 minus 119898) + 120576119894119889 119902 minus 119871
(3)
where 120574 = minus120595119891119896119871119902 120590 = 120573120591119869 120576 = (11989911990111988712059121198962(119871119889 minus 119871119902))119869119889 = (1119896119877)119906119889 119902 = (1119896119877)119906119902 and 119871 = (1205912119869)119879119871Since the conversion is linear transformation it does notchange the characteristics of the system The purpose of thetransformation is to simplify system (1) and to obtain thecorresponding chaotic model For the uniform air gap wehave 119871119889 = 119871119902 = 119871 and then (3) can be rewritten as
119889119894119889119889119905 = minus119894119889 + 119898 119902 + 119889119889119894119902119889119905 = minus119894119902 minus 119898 119889 + 120574119898 + 119902
119889119898119889119905 = 120590 (119894119902 minus 119898) minus 119871
(4)
where 119889 119902 and 119898 are the state variables which representthe stator currents of direct axis and quadrature axis and theangular frequency of rotor respectively 119889 and 119902 denotethe stator voltages of the direct axis and quadrature axisrespectively 119871 is the external torque 120590 120574 are the constantparameters The external torque is set as 119871 = 0 when 119889 = 0and 119902 = 0 Then we can obtain the following chaotic PMSMmodel
119889119894119889119889119905 = minus119894119889 + 119898 119902119889119894119902119889119905 = minus119894119902 minus 119898 119889 + 120574119898
119889119898119889119905 = 120590 (119894119902 minus 119898)
(5)
Define 1199091 = 119898 1199092 = 119902 and 1199093 = 119889 and from (5) wehave
1 = 120590 (1199092 minus 1199091)2 = 1205741199091 minus 11990911199093 minus 11990923 = 11990911199092 minus 1199093
(6)
Mathematical Problems in Engineering 3
where 1199091 1199092 and 1199093 are the states The PMSM system (6) isregarded as the active system and the corresponding passivePMSM system is given by
1 = 120590 (1199102 minus 1199101)2 = 1205741199101 minus 11991011199103 minus 1199102 + 1199063 = 11991011199102 minus 1199103
(7)
where 1199101 1199102 and 1199103 are the states and 119906 is the systemcontroller
The objective of this paper is to design the controller 119906such that the synchronization performance of the states 119909119894and 119910119894 119894 = 1 2 3 between chaotic systems (6) and (7) areachieved
3 Extend State Observer Design
Define the synchronization errors as 1198901 = 1199101minus1199091 1198902 = 1199102minus1199092and 1198903 = 1199103minus1199093 andwe can obtain the following error system
1198901 = 120590 (1198902 minus 1198901)1198902 = 1205741198901 minus 11991011199103 + 11990911199093 minus 1198902 + 1199061198903 = 11991011199102 minus 11990911199092 minus 1198903
(8)
In (8) we have the following fact
11991011199103 minus 11990911199093 = minus11989011198903 + 11989011199103 + 1198903119910111991011199102 minus 11990911199092 = minus11989011198902 + 11989011199102 + 11989021199101 (9)
Substituting (9) into (8) yields
1198901 = 120590 (1198902 minus 1198901)1198902 = 1205741198901 + 11989011198903 minus 11989011199103 minus 11989031199101 minus 1198902 + 1199061198903 = minus11989011198902 + 11989011199102 + 11989021199101 minus 1198903
(10)
Then error system (10) can be divided into the followingtwo subsystems
1198901 = 120590 (1198902 minus 1198901)1198902 = 1205741198901 + 11989011198903 minus 11989011199103 minus 11989031199101 minus 1198902 + 119906 (11)
1198903 = minus11989011198902 + 11989011199102 + 11989021199101 minus 1198903 (12)
Remark 1 From (12) it can be easily concluded that 1198903 = minus1198903when 1198901 and 1198902 converge to zero which leads 1198903 to convergeto zero finally That means the error 1198903 acts as the interiordynamics of whole system (10) Therefore the control task istransferred to design the controller 119906 for subsystem (11) andguarantee the convergence of 1198901 and 1198902
Define 1198921 = 1198901 1198922 = 120590(1198902 minus 1198901) and then subsystem (11)can be transformed into the following Brunovsky form
1 = 11989222 = 119886 (119890) + 119887119906 (13)
where 119886(119890) = 120590[1205741198901 + 11989011198903 minus 11989031199101 minus 11989011199103 minus 1198902 minus 120590(1198902 minus 1198901)]119887 = 120590In order to facilitate the design of controller 119906 the system
uncertainty 119886(119890) and unknown parameter 119887 in (13) should bemeasured by designing an observer Define 1198860 = 119886(119890) + Δ119887119906Δ119887 = 119887 minus 1198870 where 1198870 is the estimation of 119887 and can be givenby the prior experience directlyThen designing an extendedstate 1198923 = 1198860 system (13) can be transformed into
1 = 11989222 = 1198923 + 11988701199063 = 0
(14)
Define 119911119894 119894 = 1 2 3 as the observation values of the states119892119894 in (14) and the corresponding observer errors are given as1198900119894 = 119911119894 minus 119892119894 then the nonlinear extended state observer isexpressed as
1 = 1199112 minus 1205731119890012 = 1199113 minus 1205732fal (11989001 1205721 120575) + 11988701199063 = minus1205733fal (11989001 1205722 120575)
(15)
where 1205731 1205732 1205733 gt 0 are the observer tuning gains fal(sdot) is anonlinear continuous function with the following form
fal (11989001 120572119894 120575) = 119890011205751minus120572119894 1003816100381610038161003816119890011003816100381610038161003816 le 1205751003816100381610038161003816119890011003816100381610038161003816120572119894 sign (11989001) 1003816100381610038161003816119890011003816100381610038161003816 gt 120575
(16)
where 120575 gt 0 denotes the interval length of the linear segment0 lt 120572119894 lt 1 is a constant
4 Controller Design and Stability Analysis
41 Controller Design In order to stabilize the system track-ing errors 1198901 and 1198902 to the zero an adaptive controller 119906 isdesigned in this subsection based on the slidingmode controltechnique
The sliding mode surface is designed as
119904 = 1198922 + 12058211198921 (17)
Differentiate 119904 and we can obtain
119904 = 2 + 12058211 = 1198923 + 1198870119906 + 12058211198922 (18)
where 1205821 gt 0 is the control parameter
4 Mathematical Problems in Engineering
x1
y1 (SMC + ESO)y1 (ASMC + ESO)
5 10 150Time
minus10
minus5
0
5Sy
stem
stat
e
(a) Synchronization of 1199091 1199101 for SMC + ESO and ASMC + ESO
x2
y2 (SMC + ESO)y2 (ASMC + ESO)
5 10 150Time
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Syste
m st
ate
(b) Synchronization of 1199092 1199102 for SMC + ESO and ASMC + ESO
x3
y3 (SMC + ESO)y3 (ASMC + ESO)
5 10 150Time
minus5
0
5
10
15
20
Syste
m st
ate
(c) Synchronization of 1199093 1199103 for SMC + ESO and ASMC + ESO
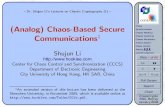
Figure 1 Synchronization performance of the system states in Case 1
According to (15) and (18) the traditional sliding modecontroller using extended state observer (SMC + ESO)depicted in [17] is given by
119906lowast = 11198870 (minus1199113 minus 12058211199112 minus 119896
lowast sign (119904)) (19)
where 119896lowast gt 0 is a constant satisfying the condition that119896lowast ge 1198893 + 12058211198892 in which 1198892 and 1198893 are the upper boundsof estimation error
Unfortunately the control gain 119896lowast cannot be obtainedaccurately since the upper bounds 1198892 and 1198893 are difficultto be measured This may lead to a negative influence
on the system control performance To solve the probleman adaptive sliding mode controller using extended stateobserver (ASMC + ESO) is developed with the followingexpression
119906 = 11198870 (minus1199113 minus 12058211199112 minus 119896 sign (119904)) (20)
where 119896 = 119896(119905) is the adaptive control parameter designed as
= 119896119898 |119904| sign (|119904| minus 120598) 119896 gt 120583120583 119896 le 120583 (21)
Mathematical Problems in Engineering 5
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus20
0
20
40
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 2 Observer errors of ESO in Case 1
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus5
0
5
10Sy
nchr
oniz
atio
n er
ror
minus20
0
20
40
Sync
hron
izat
ion
erro
r
Figure 3 Synchronization errors in Case 1
with 119896119898 120598 and 120583 being small positive constants and used toguarantee 119896 gt 042 Stability Analysis Before the system stability analysisthe following two lemmas are introduced
Lemma 2 (see [18]) The parameter 119896(119905) has an upper boundin the nonlinear uncertain system (13) with the sliding modesurface (17) namely there exists a desired value 119896lowast gt 0 whichcan guarantee that 119896(119905) le 119896lowast forall119905 gt 0Lemma 3 (see [19]) Suppose there is a continuous positivedefinite function 119881(119905) which satisfies the following differentialfunction
(119905) le minus120572119881120578 (119905) forall119905 gt 0 119881 (1199050) gt 0 (22)
where 120572 gt 0 and 0 lt 120578 lt 1 are constants Then there existsa finite-time 1199051 for the given time 1199050 and we have the followinginequality and equality relationships
1198811minus120578 (119905) le 1198811minus120578 (1199050) minus 120572 (1 minus 120578) (119905 minus 1199050) 1199050 le 119905 le 1199051119881 (119905) equiv 0 forall119905 ge 1199051 (23)
where 1199051 = 1199050 + 1198811minus120578(1199050)120572(1 minus 120578)Theorem4 Considering the uncertain PMSM subsystem (13)the sliding mode surface (17) the controller (20) and theparameter adaptive law (21) the sliding surface 119904 can convergeto zero within a finite time
6 Mathematical Problems in Engineering
u (SMC + ESO)u (ASMC + ESO)
minus20
minus15
minus10
minus5
0u
5
10
15
20
25
5 10 150Time
Figure 4 Control signals in Case 1
5 10 150Time (sec)
0
1
2
3
4k
5
6
7
8
9
Figure 5 Adaptive parameter 119896(119905) in Case 1
Proof Define a Lyapunov function for system (13)
119881 = 121199042 +12120573 2 (24)
where = 119896 minus 119896lowastDifferentiating 119881 we have = 119904 119904 + 1120573 119896 = 119904 (1198923 + 1198870119906 + 12058211198922) +
1120573 (119896 minus 119896lowast) (25)
Substitute (20) into (25) and we can obtain
= 119904 [(1198923 minus 1199113) + 1205821 (1198922 minus 1199112) minus 119896 sign (119904)]+ 1120573 (119896 minus 119896lowast)
le |119904| (10038161003816100381610038161198923 minus 11991131003816100381610038161003816 + 1205821 10038161003816100381610038161198922 minus 11991121003816100381610038161003816) minus 119896 |119904| + 119896lowast |119904|minus 119896lowast |119904| + 1120573 (119896 minus 119896lowast)
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) |119904|+ 1120573 (119896 minus 119896lowast)
= minus [119896lowast minus (1198893 + 12058211198892)] |119904| + (119896 minus 119896lowast) ( 1120573 minus |119904|) (26)
Introducing a new parameter 120572119896 gt 0 (26) can be writtenas
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) (|119904| minus 1120573 )+ 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816
(27)
According to Lemma 2 and (27) it can be concluded that
le minus120572119889 |119904| minus 120585 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816= minusradic2120572119889 |119904|radic2 minus radic2120573120572119896
1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816radic2120573 minus 120585le minus12057211989811988112 minus 120585
(28)
where 120572119889 = 119896lowastminus(1198893+12058211198892) gt 0 120585 = ((1120573)minus|119904|minus120572119896)|119896minus119896lowast|and 120572119898 = minradic2120572119889 radic2120573120572119896
Since 120583 and 120576 are both small constants without loss ofgenerality we only discuss the situation for 119896 gt 120583 When 119896 gt120583 two different cases are discussed according to relationshipbetween |119904| and 120598
(a) When |119904| gt 120598 (21) can be rewritten as = 119896119898|119904| 120585 =((1120573)119896119898|119904| minus |119904| minus 120572119896)|119896 minus 119896lowast| Choosing 120573 lt 119896119898120598(120572119896 + 120598) wecan conclude 120585 gt 0
(b)When |119904| le 120598 we have = minus119896119898|119904| it can be concludedthat 120585 lt 0 lt 0 and 119896 is gradually decreasing Thus wecan obtain 119904 gt 0 when 119896 is reduced to 0 le 119896 le 1198893 + 12058211198892Consequently sliding mode 119904will increase and achieve to therange of |119904| gt 120598
Similarly we can guarantee 120585 gt 0 by choosing theappropriate parameter 120573 when 119896 gt 120583 Then from (28) andthe above discussion we have le minus12057211989811988112 According toLemma 3 there exists a finite-time 1199051 satisfying 119881(119905) equiv 0 as119905 ge 1199051 This can ensure the convergence of the sliding mode 119904within a finite time
Theorem5 Thestate variables 1198901 1198902 1198903 in error system (8)willconverge to zerowhen the states1198921 1198922 in system (13) achieve thesliding surface 119904 = 0Proof System (13) have invariant characteristics when thestates 1198921 1198922 achieve 119904 = 0 and from (14) and (17) we have1 + 12058211198921 = 0 Then solving the first-order differentialfunction we can obtain 1198921 = 119890minus1205821119905 which means that the
Mathematical Problems in Engineering 7
5 10 150Time
x1
y1 (SMC + ESO)y1 (ASMC + ESO)
minus10
minus8
minus6
minus4
minus2
0
2
4
6Sy
stem
stat
e
14835
1484
14845
126995 12712699
(a) Synchronization of 1199091 1199101 for SMC + ESO and ASMC + ESO
5 10 150Time
x2
y2 (SMC + ESO)y2 (ASMC + ESO)
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
6
8
Syste
m st
ate
131132133134
1253 12541252
(b) Synchronization of 1199092 1199102 for SMC + ESO and ASMC + ESO
5 10 150Time
minus5
0
5
10
15
20
Syste
m st
ate
x3
y3 (SMC + ESO)y3 (ASMC + ESO)
113275 1132811327
6276
6277
6278
(c) Synchronization of 1199093 1199103 for SMC + ESO and ASMC + ESO
Figure 6 Synchronization performance of the system states in Case 2
state 1198921 can converge to zero when time tends to infinityAlso according to (17) we have the similar result that 1198922 willconverge to zero when time tends to infinity
Consequently the state variables 1198901 1198902 1198903 in error system(8) have the following relationship according to (11) and (12)1198901 1198902 converge to zero and 1198903 = minus1198903 when time tends to infin-ity Thus we can conclude that 1198901 1198902 1198903 will asymptoticallystabilized to zero This completes the proof
5 Simulation
In order to verify the effectiveness of the proposed methoda traditional sliding mode control based on extended stateobserver (SMC + ESO) is adopted to compare with the
proposed adaptive control method (ASMC + ESO) Theinitial conditions and parameters in the simulations are setthe same for a fair comparison that is the sampling timeis set as 119879119904 = 001 the initial conditions are given as(1199091(0) 1199092(0) 1199093(0)) = (minus5 1 minus3) (1199101(0) 1199102(0) 1199103(0)) =minus1 001 20 the parameters of sliding mode control andextended state observer are chosen as 1205821 = 10 1198870 = 51205731 = 60 1205732 = 200 1205733 = 001 1205721 = 05 1205722 = 025 1205723 = 0125120575 = 001 and 120590 = 546 the control parameter in SMC + ESOis given by 119896lowast = 12 the control parameters in ASMC + ESOare set as 119896119898 = 015 120598 = 001 and 120583 = 00001Case 1 (the controller 119906 works at initial time 119905 = 0) Thesimulation results are shown in Figures 1ndash5 Figure 1 provides
8 Mathematical Problems in Engineering
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus50
0
50
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 7 Observer errors of ESO in Case 2
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus20
0
20
40
Sync
hron
izat
ion
erro
r
minus10
0
10
20
Sync
hron
izat
ion
erro
r
Figure 8 Synchronization errors in Case 2
the synchronization performance of the system states Theobserver errors of ESO and synchronization errors are shownin Figures 2 and 3 respectively The control signal is givenby Figure 4 As shown in Figures 1ndash3 the compared twocontrol methods that is SMC + ESO and ASMC + ESOcan both achieve satisfactory chaos synchronization controlperformance the observer errors of ESO and system synchro-nization errors can rabidly converge to zero However fromFigure 4 we can see that the amplitude of ASMC + ESO issmaller than SMC + ESO and the chattering phenomenonof control signal in ASMC + ESO is also smaller when thesystem is stable The adaptation curve of the parameter 119896(119905)is shown in Figure 5 As can be seen from Figure 5 theparameter 119896(119905) converges to 82 which is slightly less than theparameter 119896lowast in SMC + ESO
Case 2 (the controller 119906 works at 119905 = 2119904) The parametersand initial conditions are all the same as those in Case 1for fair comparison The synchronization performance ofthe system states observer errors of ESO synchronizationerrors control signals and the adaptive parameter 119896(119905) areshown in Figures 6ndash10 respectively As can be seen fromFigures 6ndash8 the control input is delayed to be working by2 seconds and the error system is not well controlled byusing SMC + ESO however the ASMC + ESO can stillhave a good chaos synchronization control performance aftera slight chattering From Figure 9 we can clearly see thatthe chattering phenomenon of the control signal in SMC +ESO is significantly larger than that of ASMC + ESO Thereason is that for the fixed parameter 119896 in SMC + ESO thecondition that 119896lowast ge 1198893 +12058211198892 may not be always satisfied any
Mathematical Problems in Engineering 9
u (SMC + ESO)u (ASMC + ESO)
u
5 10 150Time
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
Figure 9 Control signals in Case 2
k
5 10 150Time (sec)
0
5
10
15
20
25
30
35
40
45
Figure 10 Adaptive parameter 119896(119905) in Case 2
more but the control parameter 119896(119905) in ASMC + ESO is anadaptive parameter which can always satisfy the conditionFrom Figure 10 it can be seen that the parameter 119896(119905) willconverge to 42 which is much larger than the setting value119896lowast = 12 in SMC + ESO
6 Conclusion
In this paper an adaptive sliding mode control methodusing extended state observer is presented to guarantee thesynchronization control performance for two chaotic PMSMsystems An adaptive parameter is designed for the controlgain to improve the suitability for different control situationand reduce the chattering in the control signal and theextended state observer is adopted to estimate the systemuncertainties The simulation results indicate that the system
can achieve a good synchronization control performance fordifferent initial conditions
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported by the Major Research Plan ofthe National Natural Science Foundation of China (Grantsnos 91438117 and 91538202) and National Natural ScienceFoundation of China (Grant no 61403343)
References
[1] I Ahmad A Bin Saaban A B Ibrahim and M ShahzadldquoGlobal chaos synchronization of new chaotic system usinglinear active controlrdquo Complexity vol 21 no 1 pp 379ndash3862015
[2] Q Chen X M Ren and J Na ldquoRobust finite-time chaossynchronization of uncertain permanent magnet synchronousmotorsrdquo ISA Transactions vol 58 no 1 pp 262ndash269 2015
[3] W L Ditto and S Sinha ldquoExploiting chaos for applicationsrdquoChaos vol 25 no 9 Article ID 097615 2015
[4] J Guan ldquoAdaptive modified generalized function projectionsynchronization between integer-order and fractional-orderchaotic systemsrdquo Optik vol 127 no 10 pp 4211ndash4216 2016
[5] J K Wang X Q Chen and J K Fu ldquoAdaptive finite-timecontrol of chaos in permanent magnet synchronousmotor withuncertain parametersrdquo Nonlinear Dynamics vol 78 no 2 pp1321ndash1328 2014
[6] Y-YHou ldquoFinite-time chaos suppression of permanentmagnetsynchronous motor systemsrdquo Entropy vol 16 no 4 pp 2234ndash2243 2014
[7] K L Su and C L Li ldquoChaos control of permanent magnetsynchronous motors via unidirectional correlationrdquo Optik vol125 no 14 pp 3693ndash3696 2014
[8] T-B-TNguyen T-L Liao and J-J Yan ldquoAdaptive slidingmodecontrol of chaos in permanent magnet synchronous motor viafuzzy neural networksrdquoMathematical Problems in Engineeringvol 2014 Article ID 868415 11 pages 2014
[9] X H Yang X P Liu L L Hu et al ldquoRobust sliding modevariable structure synchronization control of chaos in perma-nent magnet synchronous motorrdquo Modular Machine Tool andAutomatic Manufacturing Technique vol 1 no 8 pp 93ndash982012
[10] Q Chen Y-R Nan H-H Zheng and X-M Ren ldquoFull-orderslidingmode control of uncertain chaos in a permanentmagnetsynchronous motor based on a fuzzy extended state observerrdquoChinese Physics B vol 24 no 11 Article ID 110504 2015
[11] XHYang X P LiuH S Liu et al ldquoFuzzy sliding-mode controlin permanent magnet synchronous motorrdquo International Jour-nal of Digital Content Technology and its Applications vol 7 no1 pp 526ndash535 2013
[12] A Loria ldquoRobust linear control of (chaotic) permanent-magnetsynchronous motors with uncertaintiesrdquo IEEE Transactions onCircuits and Systems I Regular Papers vol 56 no 9 pp 2109ndash2122 2009
10 Mathematical Problems in Engineering
[13] S H Luo ldquoAdaptive fuzzy dynamic surface control for thechaotic permanent magnet synchronous motor using Nuss-baum gainrdquo Chaos vol 24 no 3 Article ID 033135 pp 5880ndash5885 2014
[14] S Luo ldquoNonlinear dynamic surface control of chaos in per-manent magnet synchronous motor based on the minimumweights of RBF neural networkrdquo Abstract and Applied Analysisvol 2014 Article ID 609340 9 pages 2014
[15] Q Wei X-Y Wang and X-P Hu ldquoOptimal control forpermanent magnet synchronous motorrdquo Journal of Vibrationand Control vol 20 no 8 pp 1176ndash1184 2014
[16] J Na Q Chen X M Ren and Y Guo ldquoAdaptive prescribedperformancemotion control of servomechanisms with frictioncompensationrdquo IEEE Transactions on Industrial Electronics vol61 no 1 pp 486ndash494 2014
[17] S Li M Zhou and X Yu ldquoDesign and implementationof terminal sliding mode control method for PMSM speedregulation systemrdquo IEEE Transactions on Industrial Informaticsvol 9 no 4 pp 1879ndash1891 2013
[18] S Yu X H Yu B Shirinzadeh and ZMan ldquoContinuous finite-time control for robotic manipulators with terminal slidingmoderdquo Automatica vol 41 no 11 pp 1957ndash1964 2005
[19] Q Chen L Yu and Y Nan ldquoFinite-time tracking control formotor servo systems with unknown dead-zonesrdquo Journal ofSystems Science amp Complexity vol 26 no 6 pp 940ndash956 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
with chaos the adaptive sliding mode control is investigatedto guarantee the synchronization control performance andthe chattering problem in traditional sliding mode control isalso improved
The rest of this paper is organized as follows The chaoticPMSMmodel and the extended state observer are derived inSections 2 and 3 respectively In Section 4 an adaptive slidingmode control scheme is developed for chaotic PMSM systemand the system analysis is provided Section 5 provides thesimulation results and the conclusion is given by Section 6
2 System Description
The mathematical model of a nonlinear PMSM system isexpressed as
119889119894119889119889119905 =(minus119877119904119894119889 + 119899119901119871119902120596119898119894119902 + 119906119889)
119871119889119889119894119902119889119905 =
(minus119877119904119894119902 minus 119899119901119871119889120596119898119894119889 minus 119899119901120595119891120596119898 + 119906119902)119871119902
119889120596119898119889119905 = 119899119901 [120595119891119894119902 + (119871119889 minus 119871119902) 119894119889119894119902] minus 119879119871 minus 119861120596119898119869
(1)
where 119894119889 119894119902 are the components of stator current in 119889-axisand 119902-axis 119906119889 119906119902 are the components of stator voltage in119889-axis and 119902-axis 119871119889 119871119902 are the equivalent inductances ofstator windings in 119889-axis and 119902-axis 120595119891 is the flux whichis generated by the permanent magnet 119877119904 is the statorresistance 119879119871 denotes the load torque 119869 is the rotary inertia119861 is the coefficient of friction 119899119901 represents the pole pairs ofmotor 120596119898 is the mechanical angular velocity of rotor
Define
119909 = [119894119889 119894119902 120596119898] = [119894119889 119902 119898] 119887 = 119871119902119871119889
119896 = 120573(119899119901120591120595119891)
120591 = 119871119889119877119904
120582 = [[[
120582119889 0 00 120582119902 00 0 120582120596
]]]= [[[[[
119887119896 0 00 119896 00 0 1
120591
]]]]]
(2)
and choose the affine transformation 119909 = 120582 and timescale transformation 119905 = 120591 for system (1) then (1) can betransformed into
119889119894119889119889119905 = minus119894119889 + 119898 119902 + 119889119889119894119902119889119905 = minus119894119902 minus 119898 119889 + 120574119898 + 119902
119889119898119889119905 = 120590 (119894119902 minus 119898) + 120576119894119889 119902 minus 119871
(3)
where 120574 = minus120595119891119896119871119902 120590 = 120573120591119869 120576 = (11989911990111988712059121198962(119871119889 minus 119871119902))119869119889 = (1119896119877)119906119889 119902 = (1119896119877)119906119902 and 119871 = (1205912119869)119879119871Since the conversion is linear transformation it does notchange the characteristics of the system The purpose of thetransformation is to simplify system (1) and to obtain thecorresponding chaotic model For the uniform air gap wehave 119871119889 = 119871119902 = 119871 and then (3) can be rewritten as
119889119894119889119889119905 = minus119894119889 + 119898 119902 + 119889119889119894119902119889119905 = minus119894119902 minus 119898 119889 + 120574119898 + 119902
119889119898119889119905 = 120590 (119894119902 minus 119898) minus 119871
(4)
where 119889 119902 and 119898 are the state variables which representthe stator currents of direct axis and quadrature axis and theangular frequency of rotor respectively 119889 and 119902 denotethe stator voltages of the direct axis and quadrature axisrespectively 119871 is the external torque 120590 120574 are the constantparameters The external torque is set as 119871 = 0 when 119889 = 0and 119902 = 0 Then we can obtain the following chaotic PMSMmodel
119889119894119889119889119905 = minus119894119889 + 119898 119902119889119894119902119889119905 = minus119894119902 minus 119898 119889 + 120574119898
119889119898119889119905 = 120590 (119894119902 minus 119898)
(5)
Define 1199091 = 119898 1199092 = 119902 and 1199093 = 119889 and from (5) wehave
1 = 120590 (1199092 minus 1199091)2 = 1205741199091 minus 11990911199093 minus 11990923 = 11990911199092 minus 1199093
(6)
Mathematical Problems in Engineering 3
where 1199091 1199092 and 1199093 are the states The PMSM system (6) isregarded as the active system and the corresponding passivePMSM system is given by
1 = 120590 (1199102 minus 1199101)2 = 1205741199101 minus 11991011199103 minus 1199102 + 1199063 = 11991011199102 minus 1199103
(7)
where 1199101 1199102 and 1199103 are the states and 119906 is the systemcontroller
The objective of this paper is to design the controller 119906such that the synchronization performance of the states 119909119894and 119910119894 119894 = 1 2 3 between chaotic systems (6) and (7) areachieved
3 Extend State Observer Design
Define the synchronization errors as 1198901 = 1199101minus1199091 1198902 = 1199102minus1199092and 1198903 = 1199103minus1199093 andwe can obtain the following error system
1198901 = 120590 (1198902 minus 1198901)1198902 = 1205741198901 minus 11991011199103 + 11990911199093 minus 1198902 + 1199061198903 = 11991011199102 minus 11990911199092 minus 1198903
(8)
In (8) we have the following fact
11991011199103 minus 11990911199093 = minus11989011198903 + 11989011199103 + 1198903119910111991011199102 minus 11990911199092 = minus11989011198902 + 11989011199102 + 11989021199101 (9)
Substituting (9) into (8) yields
1198901 = 120590 (1198902 minus 1198901)1198902 = 1205741198901 + 11989011198903 minus 11989011199103 minus 11989031199101 minus 1198902 + 1199061198903 = minus11989011198902 + 11989011199102 + 11989021199101 minus 1198903
(10)
Then error system (10) can be divided into the followingtwo subsystems
1198901 = 120590 (1198902 minus 1198901)1198902 = 1205741198901 + 11989011198903 minus 11989011199103 minus 11989031199101 minus 1198902 + 119906 (11)
1198903 = minus11989011198902 + 11989011199102 + 11989021199101 minus 1198903 (12)
Remark 1 From (12) it can be easily concluded that 1198903 = minus1198903when 1198901 and 1198902 converge to zero which leads 1198903 to convergeto zero finally That means the error 1198903 acts as the interiordynamics of whole system (10) Therefore the control task istransferred to design the controller 119906 for subsystem (11) andguarantee the convergence of 1198901 and 1198902
Define 1198921 = 1198901 1198922 = 120590(1198902 minus 1198901) and then subsystem (11)can be transformed into the following Brunovsky form
1 = 11989222 = 119886 (119890) + 119887119906 (13)
where 119886(119890) = 120590[1205741198901 + 11989011198903 minus 11989031199101 minus 11989011199103 minus 1198902 minus 120590(1198902 minus 1198901)]119887 = 120590In order to facilitate the design of controller 119906 the system
uncertainty 119886(119890) and unknown parameter 119887 in (13) should bemeasured by designing an observer Define 1198860 = 119886(119890) + Δ119887119906Δ119887 = 119887 minus 1198870 where 1198870 is the estimation of 119887 and can be givenby the prior experience directlyThen designing an extendedstate 1198923 = 1198860 system (13) can be transformed into
1 = 11989222 = 1198923 + 11988701199063 = 0
(14)
Define 119911119894 119894 = 1 2 3 as the observation values of the states119892119894 in (14) and the corresponding observer errors are given as1198900119894 = 119911119894 minus 119892119894 then the nonlinear extended state observer isexpressed as
1 = 1199112 minus 1205731119890012 = 1199113 minus 1205732fal (11989001 1205721 120575) + 11988701199063 = minus1205733fal (11989001 1205722 120575)
(15)
where 1205731 1205732 1205733 gt 0 are the observer tuning gains fal(sdot) is anonlinear continuous function with the following form
fal (11989001 120572119894 120575) = 119890011205751minus120572119894 1003816100381610038161003816119890011003816100381610038161003816 le 1205751003816100381610038161003816119890011003816100381610038161003816120572119894 sign (11989001) 1003816100381610038161003816119890011003816100381610038161003816 gt 120575
(16)
where 120575 gt 0 denotes the interval length of the linear segment0 lt 120572119894 lt 1 is a constant
4 Controller Design and Stability Analysis
41 Controller Design In order to stabilize the system track-ing errors 1198901 and 1198902 to the zero an adaptive controller 119906 isdesigned in this subsection based on the slidingmode controltechnique
The sliding mode surface is designed as
119904 = 1198922 + 12058211198921 (17)
Differentiate 119904 and we can obtain
119904 = 2 + 12058211 = 1198923 + 1198870119906 + 12058211198922 (18)
where 1205821 gt 0 is the control parameter
4 Mathematical Problems in Engineering
x1
y1 (SMC + ESO)y1 (ASMC + ESO)
5 10 150Time
minus10
minus5
0
5Sy
stem
stat
e
(a) Synchronization of 1199091 1199101 for SMC + ESO and ASMC + ESO
x2
y2 (SMC + ESO)y2 (ASMC + ESO)
5 10 150Time
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Syste
m st
ate
(b) Synchronization of 1199092 1199102 for SMC + ESO and ASMC + ESO
x3
y3 (SMC + ESO)y3 (ASMC + ESO)
5 10 150Time
minus5
0
5
10
15
20
Syste
m st
ate
(c) Synchronization of 1199093 1199103 for SMC + ESO and ASMC + ESO
Figure 1 Synchronization performance of the system states in Case 1
According to (15) and (18) the traditional sliding modecontroller using extended state observer (SMC + ESO)depicted in [17] is given by
119906lowast = 11198870 (minus1199113 minus 12058211199112 minus 119896
lowast sign (119904)) (19)
where 119896lowast gt 0 is a constant satisfying the condition that119896lowast ge 1198893 + 12058211198892 in which 1198892 and 1198893 are the upper boundsof estimation error
Unfortunately the control gain 119896lowast cannot be obtainedaccurately since the upper bounds 1198892 and 1198893 are difficultto be measured This may lead to a negative influence
on the system control performance To solve the probleman adaptive sliding mode controller using extended stateobserver (ASMC + ESO) is developed with the followingexpression
119906 = 11198870 (minus1199113 minus 12058211199112 minus 119896 sign (119904)) (20)
where 119896 = 119896(119905) is the adaptive control parameter designed as
= 119896119898 |119904| sign (|119904| minus 120598) 119896 gt 120583120583 119896 le 120583 (21)
Mathematical Problems in Engineering 5
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus20
0
20
40
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 2 Observer errors of ESO in Case 1
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus5
0
5
10Sy
nchr
oniz
atio
n er
ror
minus20
0
20
40
Sync
hron
izat
ion
erro
r
Figure 3 Synchronization errors in Case 1
with 119896119898 120598 and 120583 being small positive constants and used toguarantee 119896 gt 042 Stability Analysis Before the system stability analysisthe following two lemmas are introduced
Lemma 2 (see [18]) The parameter 119896(119905) has an upper boundin the nonlinear uncertain system (13) with the sliding modesurface (17) namely there exists a desired value 119896lowast gt 0 whichcan guarantee that 119896(119905) le 119896lowast forall119905 gt 0Lemma 3 (see [19]) Suppose there is a continuous positivedefinite function 119881(119905) which satisfies the following differentialfunction
(119905) le minus120572119881120578 (119905) forall119905 gt 0 119881 (1199050) gt 0 (22)
where 120572 gt 0 and 0 lt 120578 lt 1 are constants Then there existsa finite-time 1199051 for the given time 1199050 and we have the followinginequality and equality relationships
1198811minus120578 (119905) le 1198811minus120578 (1199050) minus 120572 (1 minus 120578) (119905 minus 1199050) 1199050 le 119905 le 1199051119881 (119905) equiv 0 forall119905 ge 1199051 (23)
where 1199051 = 1199050 + 1198811minus120578(1199050)120572(1 minus 120578)Theorem4 Considering the uncertain PMSM subsystem (13)the sliding mode surface (17) the controller (20) and theparameter adaptive law (21) the sliding surface 119904 can convergeto zero within a finite time
6 Mathematical Problems in Engineering
u (SMC + ESO)u (ASMC + ESO)
minus20
minus15
minus10
minus5
0u
5
10
15
20
25
5 10 150Time
Figure 4 Control signals in Case 1
5 10 150Time (sec)
0
1
2
3
4k
5
6
7
8
9
Figure 5 Adaptive parameter 119896(119905) in Case 1
Proof Define a Lyapunov function for system (13)
119881 = 121199042 +12120573 2 (24)
where = 119896 minus 119896lowastDifferentiating 119881 we have = 119904 119904 + 1120573 119896 = 119904 (1198923 + 1198870119906 + 12058211198922) +
1120573 (119896 minus 119896lowast) (25)
Substitute (20) into (25) and we can obtain
= 119904 [(1198923 minus 1199113) + 1205821 (1198922 minus 1199112) minus 119896 sign (119904)]+ 1120573 (119896 minus 119896lowast)
le |119904| (10038161003816100381610038161198923 minus 11991131003816100381610038161003816 + 1205821 10038161003816100381610038161198922 minus 11991121003816100381610038161003816) minus 119896 |119904| + 119896lowast |119904|minus 119896lowast |119904| + 1120573 (119896 minus 119896lowast)
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) |119904|+ 1120573 (119896 minus 119896lowast)
= minus [119896lowast minus (1198893 + 12058211198892)] |119904| + (119896 minus 119896lowast) ( 1120573 minus |119904|) (26)
Introducing a new parameter 120572119896 gt 0 (26) can be writtenas
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) (|119904| minus 1120573 )+ 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816
(27)
According to Lemma 2 and (27) it can be concluded that
le minus120572119889 |119904| minus 120585 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816= minusradic2120572119889 |119904|radic2 minus radic2120573120572119896
1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816radic2120573 minus 120585le minus12057211989811988112 minus 120585
(28)
where 120572119889 = 119896lowastminus(1198893+12058211198892) gt 0 120585 = ((1120573)minus|119904|minus120572119896)|119896minus119896lowast|and 120572119898 = minradic2120572119889 radic2120573120572119896
Since 120583 and 120576 are both small constants without loss ofgenerality we only discuss the situation for 119896 gt 120583 When 119896 gt120583 two different cases are discussed according to relationshipbetween |119904| and 120598
(a) When |119904| gt 120598 (21) can be rewritten as = 119896119898|119904| 120585 =((1120573)119896119898|119904| minus |119904| minus 120572119896)|119896 minus 119896lowast| Choosing 120573 lt 119896119898120598(120572119896 + 120598) wecan conclude 120585 gt 0
(b)When |119904| le 120598 we have = minus119896119898|119904| it can be concludedthat 120585 lt 0 lt 0 and 119896 is gradually decreasing Thus wecan obtain 119904 gt 0 when 119896 is reduced to 0 le 119896 le 1198893 + 12058211198892Consequently sliding mode 119904will increase and achieve to therange of |119904| gt 120598
Similarly we can guarantee 120585 gt 0 by choosing theappropriate parameter 120573 when 119896 gt 120583 Then from (28) andthe above discussion we have le minus12057211989811988112 According toLemma 3 there exists a finite-time 1199051 satisfying 119881(119905) equiv 0 as119905 ge 1199051 This can ensure the convergence of the sliding mode 119904within a finite time
Theorem5 Thestate variables 1198901 1198902 1198903 in error system (8)willconverge to zerowhen the states1198921 1198922 in system (13) achieve thesliding surface 119904 = 0Proof System (13) have invariant characteristics when thestates 1198921 1198922 achieve 119904 = 0 and from (14) and (17) we have1 + 12058211198921 = 0 Then solving the first-order differentialfunction we can obtain 1198921 = 119890minus1205821119905 which means that the
Mathematical Problems in Engineering 7
5 10 150Time
x1
y1 (SMC + ESO)y1 (ASMC + ESO)
minus10
minus8
minus6
minus4
minus2
0
2
4
6Sy
stem
stat
e
14835
1484
14845
126995 12712699
(a) Synchronization of 1199091 1199101 for SMC + ESO and ASMC + ESO
5 10 150Time
x2
y2 (SMC + ESO)y2 (ASMC + ESO)
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
6
8
Syste
m st
ate
131132133134
1253 12541252
(b) Synchronization of 1199092 1199102 for SMC + ESO and ASMC + ESO
5 10 150Time
minus5
0
5
10
15
20
Syste
m st
ate
x3
y3 (SMC + ESO)y3 (ASMC + ESO)
113275 1132811327
6276
6277
6278
(c) Synchronization of 1199093 1199103 for SMC + ESO and ASMC + ESO
Figure 6 Synchronization performance of the system states in Case 2
state 1198921 can converge to zero when time tends to infinityAlso according to (17) we have the similar result that 1198922 willconverge to zero when time tends to infinity
Consequently the state variables 1198901 1198902 1198903 in error system(8) have the following relationship according to (11) and (12)1198901 1198902 converge to zero and 1198903 = minus1198903 when time tends to infin-ity Thus we can conclude that 1198901 1198902 1198903 will asymptoticallystabilized to zero This completes the proof
5 Simulation
In order to verify the effectiveness of the proposed methoda traditional sliding mode control based on extended stateobserver (SMC + ESO) is adopted to compare with the
proposed adaptive control method (ASMC + ESO) Theinitial conditions and parameters in the simulations are setthe same for a fair comparison that is the sampling timeis set as 119879119904 = 001 the initial conditions are given as(1199091(0) 1199092(0) 1199093(0)) = (minus5 1 minus3) (1199101(0) 1199102(0) 1199103(0)) =minus1 001 20 the parameters of sliding mode control andextended state observer are chosen as 1205821 = 10 1198870 = 51205731 = 60 1205732 = 200 1205733 = 001 1205721 = 05 1205722 = 025 1205723 = 0125120575 = 001 and 120590 = 546 the control parameter in SMC + ESOis given by 119896lowast = 12 the control parameters in ASMC + ESOare set as 119896119898 = 015 120598 = 001 and 120583 = 00001Case 1 (the controller 119906 works at initial time 119905 = 0) Thesimulation results are shown in Figures 1ndash5 Figure 1 provides
8 Mathematical Problems in Engineering
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus50
0
50
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 7 Observer errors of ESO in Case 2
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus20
0
20
40
Sync
hron
izat
ion
erro
r
minus10
0
10
20
Sync
hron
izat
ion
erro
r
Figure 8 Synchronization errors in Case 2
the synchronization performance of the system states Theobserver errors of ESO and synchronization errors are shownin Figures 2 and 3 respectively The control signal is givenby Figure 4 As shown in Figures 1ndash3 the compared twocontrol methods that is SMC + ESO and ASMC + ESOcan both achieve satisfactory chaos synchronization controlperformance the observer errors of ESO and system synchro-nization errors can rabidly converge to zero However fromFigure 4 we can see that the amplitude of ASMC + ESO issmaller than SMC + ESO and the chattering phenomenonof control signal in ASMC + ESO is also smaller when thesystem is stable The adaptation curve of the parameter 119896(119905)is shown in Figure 5 As can be seen from Figure 5 theparameter 119896(119905) converges to 82 which is slightly less than theparameter 119896lowast in SMC + ESO
Case 2 (the controller 119906 works at 119905 = 2119904) The parametersand initial conditions are all the same as those in Case 1for fair comparison The synchronization performance ofthe system states observer errors of ESO synchronizationerrors control signals and the adaptive parameter 119896(119905) areshown in Figures 6ndash10 respectively As can be seen fromFigures 6ndash8 the control input is delayed to be working by2 seconds and the error system is not well controlled byusing SMC + ESO however the ASMC + ESO can stillhave a good chaos synchronization control performance aftera slight chattering From Figure 9 we can clearly see thatthe chattering phenomenon of the control signal in SMC +ESO is significantly larger than that of ASMC + ESO Thereason is that for the fixed parameter 119896 in SMC + ESO thecondition that 119896lowast ge 1198893 +12058211198892 may not be always satisfied any
Mathematical Problems in Engineering 9
u (SMC + ESO)u (ASMC + ESO)
u
5 10 150Time
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
Figure 9 Control signals in Case 2
k
5 10 150Time (sec)
0
5
10
15
20
25
30
35
40
45
Figure 10 Adaptive parameter 119896(119905) in Case 2
more but the control parameter 119896(119905) in ASMC + ESO is anadaptive parameter which can always satisfy the conditionFrom Figure 10 it can be seen that the parameter 119896(119905) willconverge to 42 which is much larger than the setting value119896lowast = 12 in SMC + ESO
6 Conclusion
In this paper an adaptive sliding mode control methodusing extended state observer is presented to guarantee thesynchronization control performance for two chaotic PMSMsystems An adaptive parameter is designed for the controlgain to improve the suitability for different control situationand reduce the chattering in the control signal and theextended state observer is adopted to estimate the systemuncertainties The simulation results indicate that the system
can achieve a good synchronization control performance fordifferent initial conditions
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported by the Major Research Plan ofthe National Natural Science Foundation of China (Grantsnos 91438117 and 91538202) and National Natural ScienceFoundation of China (Grant no 61403343)
References
[1] I Ahmad A Bin Saaban A B Ibrahim and M ShahzadldquoGlobal chaos synchronization of new chaotic system usinglinear active controlrdquo Complexity vol 21 no 1 pp 379ndash3862015
[2] Q Chen X M Ren and J Na ldquoRobust finite-time chaossynchronization of uncertain permanent magnet synchronousmotorsrdquo ISA Transactions vol 58 no 1 pp 262ndash269 2015
[3] W L Ditto and S Sinha ldquoExploiting chaos for applicationsrdquoChaos vol 25 no 9 Article ID 097615 2015
[4] J Guan ldquoAdaptive modified generalized function projectionsynchronization between integer-order and fractional-orderchaotic systemsrdquo Optik vol 127 no 10 pp 4211ndash4216 2016
[5] J K Wang X Q Chen and J K Fu ldquoAdaptive finite-timecontrol of chaos in permanent magnet synchronousmotor withuncertain parametersrdquo Nonlinear Dynamics vol 78 no 2 pp1321ndash1328 2014
[6] Y-YHou ldquoFinite-time chaos suppression of permanentmagnetsynchronous motor systemsrdquo Entropy vol 16 no 4 pp 2234ndash2243 2014
[7] K L Su and C L Li ldquoChaos control of permanent magnetsynchronous motors via unidirectional correlationrdquo Optik vol125 no 14 pp 3693ndash3696 2014
[8] T-B-TNguyen T-L Liao and J-J Yan ldquoAdaptive slidingmodecontrol of chaos in permanent magnet synchronous motor viafuzzy neural networksrdquoMathematical Problems in Engineeringvol 2014 Article ID 868415 11 pages 2014
[9] X H Yang X P Liu L L Hu et al ldquoRobust sliding modevariable structure synchronization control of chaos in perma-nent magnet synchronous motorrdquo Modular Machine Tool andAutomatic Manufacturing Technique vol 1 no 8 pp 93ndash982012
[10] Q Chen Y-R Nan H-H Zheng and X-M Ren ldquoFull-orderslidingmode control of uncertain chaos in a permanentmagnetsynchronous motor based on a fuzzy extended state observerrdquoChinese Physics B vol 24 no 11 Article ID 110504 2015
[11] XHYang X P LiuH S Liu et al ldquoFuzzy sliding-mode controlin permanent magnet synchronous motorrdquo International Jour-nal of Digital Content Technology and its Applications vol 7 no1 pp 526ndash535 2013
[12] A Loria ldquoRobust linear control of (chaotic) permanent-magnetsynchronous motors with uncertaintiesrdquo IEEE Transactions onCircuits and Systems I Regular Papers vol 56 no 9 pp 2109ndash2122 2009
10 Mathematical Problems in Engineering
[13] S H Luo ldquoAdaptive fuzzy dynamic surface control for thechaotic permanent magnet synchronous motor using Nuss-baum gainrdquo Chaos vol 24 no 3 Article ID 033135 pp 5880ndash5885 2014
[14] S Luo ldquoNonlinear dynamic surface control of chaos in per-manent magnet synchronous motor based on the minimumweights of RBF neural networkrdquo Abstract and Applied Analysisvol 2014 Article ID 609340 9 pages 2014
[15] Q Wei X-Y Wang and X-P Hu ldquoOptimal control forpermanent magnet synchronous motorrdquo Journal of Vibrationand Control vol 20 no 8 pp 1176ndash1184 2014
[16] J Na Q Chen X M Ren and Y Guo ldquoAdaptive prescribedperformancemotion control of servomechanisms with frictioncompensationrdquo IEEE Transactions on Industrial Electronics vol61 no 1 pp 486ndash494 2014
[17] S Li M Zhou and X Yu ldquoDesign and implementationof terminal sliding mode control method for PMSM speedregulation systemrdquo IEEE Transactions on Industrial Informaticsvol 9 no 4 pp 1879ndash1891 2013
[18] S Yu X H Yu B Shirinzadeh and ZMan ldquoContinuous finite-time control for robotic manipulators with terminal slidingmoderdquo Automatica vol 41 no 11 pp 1957ndash1964 2005
[19] Q Chen L Yu and Y Nan ldquoFinite-time tracking control formotor servo systems with unknown dead-zonesrdquo Journal ofSystems Science amp Complexity vol 26 no 6 pp 940ndash956 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
where 1199091 1199092 and 1199093 are the states The PMSM system (6) isregarded as the active system and the corresponding passivePMSM system is given by
1 = 120590 (1199102 minus 1199101)2 = 1205741199101 minus 11991011199103 minus 1199102 + 1199063 = 11991011199102 minus 1199103
(7)
where 1199101 1199102 and 1199103 are the states and 119906 is the systemcontroller
The objective of this paper is to design the controller 119906such that the synchronization performance of the states 119909119894and 119910119894 119894 = 1 2 3 between chaotic systems (6) and (7) areachieved
3 Extend State Observer Design
Define the synchronization errors as 1198901 = 1199101minus1199091 1198902 = 1199102minus1199092and 1198903 = 1199103minus1199093 andwe can obtain the following error system
1198901 = 120590 (1198902 minus 1198901)1198902 = 1205741198901 minus 11991011199103 + 11990911199093 minus 1198902 + 1199061198903 = 11991011199102 minus 11990911199092 minus 1198903
(8)
In (8) we have the following fact
11991011199103 minus 11990911199093 = minus11989011198903 + 11989011199103 + 1198903119910111991011199102 minus 11990911199092 = minus11989011198902 + 11989011199102 + 11989021199101 (9)
Substituting (9) into (8) yields
1198901 = 120590 (1198902 minus 1198901)1198902 = 1205741198901 + 11989011198903 minus 11989011199103 minus 11989031199101 minus 1198902 + 1199061198903 = minus11989011198902 + 11989011199102 + 11989021199101 minus 1198903
(10)
Then error system (10) can be divided into the followingtwo subsystems
1198901 = 120590 (1198902 minus 1198901)1198902 = 1205741198901 + 11989011198903 minus 11989011199103 minus 11989031199101 minus 1198902 + 119906 (11)
1198903 = minus11989011198902 + 11989011199102 + 11989021199101 minus 1198903 (12)
Remark 1 From (12) it can be easily concluded that 1198903 = minus1198903when 1198901 and 1198902 converge to zero which leads 1198903 to convergeto zero finally That means the error 1198903 acts as the interiordynamics of whole system (10) Therefore the control task istransferred to design the controller 119906 for subsystem (11) andguarantee the convergence of 1198901 and 1198902
Define 1198921 = 1198901 1198922 = 120590(1198902 minus 1198901) and then subsystem (11)can be transformed into the following Brunovsky form
1 = 11989222 = 119886 (119890) + 119887119906 (13)
where 119886(119890) = 120590[1205741198901 + 11989011198903 minus 11989031199101 minus 11989011199103 minus 1198902 minus 120590(1198902 minus 1198901)]119887 = 120590In order to facilitate the design of controller 119906 the system
uncertainty 119886(119890) and unknown parameter 119887 in (13) should bemeasured by designing an observer Define 1198860 = 119886(119890) + Δ119887119906Δ119887 = 119887 minus 1198870 where 1198870 is the estimation of 119887 and can be givenby the prior experience directlyThen designing an extendedstate 1198923 = 1198860 system (13) can be transformed into
1 = 11989222 = 1198923 + 11988701199063 = 0
(14)
Define 119911119894 119894 = 1 2 3 as the observation values of the states119892119894 in (14) and the corresponding observer errors are given as1198900119894 = 119911119894 minus 119892119894 then the nonlinear extended state observer isexpressed as
1 = 1199112 minus 1205731119890012 = 1199113 minus 1205732fal (11989001 1205721 120575) + 11988701199063 = minus1205733fal (11989001 1205722 120575)
(15)
where 1205731 1205732 1205733 gt 0 are the observer tuning gains fal(sdot) is anonlinear continuous function with the following form
fal (11989001 120572119894 120575) = 119890011205751minus120572119894 1003816100381610038161003816119890011003816100381610038161003816 le 1205751003816100381610038161003816119890011003816100381610038161003816120572119894 sign (11989001) 1003816100381610038161003816119890011003816100381610038161003816 gt 120575
(16)
where 120575 gt 0 denotes the interval length of the linear segment0 lt 120572119894 lt 1 is a constant
4 Controller Design and Stability Analysis
41 Controller Design In order to stabilize the system track-ing errors 1198901 and 1198902 to the zero an adaptive controller 119906 isdesigned in this subsection based on the slidingmode controltechnique
The sliding mode surface is designed as
119904 = 1198922 + 12058211198921 (17)
Differentiate 119904 and we can obtain
119904 = 2 + 12058211 = 1198923 + 1198870119906 + 12058211198922 (18)
where 1205821 gt 0 is the control parameter
4 Mathematical Problems in Engineering
x1
y1 (SMC + ESO)y1 (ASMC + ESO)
5 10 150Time
minus10
minus5
0
5Sy
stem
stat
e
(a) Synchronization of 1199091 1199101 for SMC + ESO and ASMC + ESO
x2
y2 (SMC + ESO)y2 (ASMC + ESO)
5 10 150Time
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Syste
m st
ate
(b) Synchronization of 1199092 1199102 for SMC + ESO and ASMC + ESO
x3
y3 (SMC + ESO)y3 (ASMC + ESO)
5 10 150Time
minus5
0
5
10
15
20
Syste
m st
ate
(c) Synchronization of 1199093 1199103 for SMC + ESO and ASMC + ESO
Figure 1 Synchronization performance of the system states in Case 1
According to (15) and (18) the traditional sliding modecontroller using extended state observer (SMC + ESO)depicted in [17] is given by
119906lowast = 11198870 (minus1199113 minus 12058211199112 minus 119896
lowast sign (119904)) (19)
where 119896lowast gt 0 is a constant satisfying the condition that119896lowast ge 1198893 + 12058211198892 in which 1198892 and 1198893 are the upper boundsof estimation error
Unfortunately the control gain 119896lowast cannot be obtainedaccurately since the upper bounds 1198892 and 1198893 are difficultto be measured This may lead to a negative influence
on the system control performance To solve the probleman adaptive sliding mode controller using extended stateobserver (ASMC + ESO) is developed with the followingexpression
119906 = 11198870 (minus1199113 minus 12058211199112 minus 119896 sign (119904)) (20)
where 119896 = 119896(119905) is the adaptive control parameter designed as
= 119896119898 |119904| sign (|119904| minus 120598) 119896 gt 120583120583 119896 le 120583 (21)
Mathematical Problems in Engineering 5
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus20
0
20
40
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 2 Observer errors of ESO in Case 1
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus5
0
5
10Sy
nchr
oniz
atio
n er
ror
minus20
0
20
40
Sync
hron
izat
ion
erro
r
Figure 3 Synchronization errors in Case 1
with 119896119898 120598 and 120583 being small positive constants and used toguarantee 119896 gt 042 Stability Analysis Before the system stability analysisthe following two lemmas are introduced
Lemma 2 (see [18]) The parameter 119896(119905) has an upper boundin the nonlinear uncertain system (13) with the sliding modesurface (17) namely there exists a desired value 119896lowast gt 0 whichcan guarantee that 119896(119905) le 119896lowast forall119905 gt 0Lemma 3 (see [19]) Suppose there is a continuous positivedefinite function 119881(119905) which satisfies the following differentialfunction
(119905) le minus120572119881120578 (119905) forall119905 gt 0 119881 (1199050) gt 0 (22)
where 120572 gt 0 and 0 lt 120578 lt 1 are constants Then there existsa finite-time 1199051 for the given time 1199050 and we have the followinginequality and equality relationships
1198811minus120578 (119905) le 1198811minus120578 (1199050) minus 120572 (1 minus 120578) (119905 minus 1199050) 1199050 le 119905 le 1199051119881 (119905) equiv 0 forall119905 ge 1199051 (23)
where 1199051 = 1199050 + 1198811minus120578(1199050)120572(1 minus 120578)Theorem4 Considering the uncertain PMSM subsystem (13)the sliding mode surface (17) the controller (20) and theparameter adaptive law (21) the sliding surface 119904 can convergeto zero within a finite time
6 Mathematical Problems in Engineering
u (SMC + ESO)u (ASMC + ESO)
minus20
minus15
minus10
minus5
0u
5
10
15
20
25
5 10 150Time
Figure 4 Control signals in Case 1
5 10 150Time (sec)
0
1
2
3
4k
5
6
7
8
9
Figure 5 Adaptive parameter 119896(119905) in Case 1
Proof Define a Lyapunov function for system (13)
119881 = 121199042 +12120573 2 (24)
where = 119896 minus 119896lowastDifferentiating 119881 we have = 119904 119904 + 1120573 119896 = 119904 (1198923 + 1198870119906 + 12058211198922) +
1120573 (119896 minus 119896lowast) (25)
Substitute (20) into (25) and we can obtain
= 119904 [(1198923 minus 1199113) + 1205821 (1198922 minus 1199112) minus 119896 sign (119904)]+ 1120573 (119896 minus 119896lowast)
le |119904| (10038161003816100381610038161198923 minus 11991131003816100381610038161003816 + 1205821 10038161003816100381610038161198922 minus 11991121003816100381610038161003816) minus 119896 |119904| + 119896lowast |119904|minus 119896lowast |119904| + 1120573 (119896 minus 119896lowast)
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) |119904|+ 1120573 (119896 minus 119896lowast)
= minus [119896lowast minus (1198893 + 12058211198892)] |119904| + (119896 minus 119896lowast) ( 1120573 minus |119904|) (26)
Introducing a new parameter 120572119896 gt 0 (26) can be writtenas
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) (|119904| minus 1120573 )+ 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816
(27)
According to Lemma 2 and (27) it can be concluded that
le minus120572119889 |119904| minus 120585 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816= minusradic2120572119889 |119904|radic2 minus radic2120573120572119896
1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816radic2120573 minus 120585le minus12057211989811988112 minus 120585
(28)
where 120572119889 = 119896lowastminus(1198893+12058211198892) gt 0 120585 = ((1120573)minus|119904|minus120572119896)|119896minus119896lowast|and 120572119898 = minradic2120572119889 radic2120573120572119896
Since 120583 and 120576 are both small constants without loss ofgenerality we only discuss the situation for 119896 gt 120583 When 119896 gt120583 two different cases are discussed according to relationshipbetween |119904| and 120598
(a) When |119904| gt 120598 (21) can be rewritten as = 119896119898|119904| 120585 =((1120573)119896119898|119904| minus |119904| minus 120572119896)|119896 minus 119896lowast| Choosing 120573 lt 119896119898120598(120572119896 + 120598) wecan conclude 120585 gt 0
(b)When |119904| le 120598 we have = minus119896119898|119904| it can be concludedthat 120585 lt 0 lt 0 and 119896 is gradually decreasing Thus wecan obtain 119904 gt 0 when 119896 is reduced to 0 le 119896 le 1198893 + 12058211198892Consequently sliding mode 119904will increase and achieve to therange of |119904| gt 120598
Similarly we can guarantee 120585 gt 0 by choosing theappropriate parameter 120573 when 119896 gt 120583 Then from (28) andthe above discussion we have le minus12057211989811988112 According toLemma 3 there exists a finite-time 1199051 satisfying 119881(119905) equiv 0 as119905 ge 1199051 This can ensure the convergence of the sliding mode 119904within a finite time
Theorem5 Thestate variables 1198901 1198902 1198903 in error system (8)willconverge to zerowhen the states1198921 1198922 in system (13) achieve thesliding surface 119904 = 0Proof System (13) have invariant characteristics when thestates 1198921 1198922 achieve 119904 = 0 and from (14) and (17) we have1 + 12058211198921 = 0 Then solving the first-order differentialfunction we can obtain 1198921 = 119890minus1205821119905 which means that the
Mathematical Problems in Engineering 7
5 10 150Time
x1
y1 (SMC + ESO)y1 (ASMC + ESO)
minus10
minus8
minus6
minus4
minus2
0
2
4
6Sy
stem
stat
e
14835
1484
14845
126995 12712699
(a) Synchronization of 1199091 1199101 for SMC + ESO and ASMC + ESO
5 10 150Time
x2
y2 (SMC + ESO)y2 (ASMC + ESO)
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
6
8
Syste
m st
ate
131132133134
1253 12541252
(b) Synchronization of 1199092 1199102 for SMC + ESO and ASMC + ESO
5 10 150Time
minus5
0
5
10
15
20
Syste
m st
ate
x3
y3 (SMC + ESO)y3 (ASMC + ESO)
113275 1132811327
6276
6277
6278
(c) Synchronization of 1199093 1199103 for SMC + ESO and ASMC + ESO
Figure 6 Synchronization performance of the system states in Case 2
state 1198921 can converge to zero when time tends to infinityAlso according to (17) we have the similar result that 1198922 willconverge to zero when time tends to infinity
Consequently the state variables 1198901 1198902 1198903 in error system(8) have the following relationship according to (11) and (12)1198901 1198902 converge to zero and 1198903 = minus1198903 when time tends to infin-ity Thus we can conclude that 1198901 1198902 1198903 will asymptoticallystabilized to zero This completes the proof
5 Simulation
In order to verify the effectiveness of the proposed methoda traditional sliding mode control based on extended stateobserver (SMC + ESO) is adopted to compare with the
proposed adaptive control method (ASMC + ESO) Theinitial conditions and parameters in the simulations are setthe same for a fair comparison that is the sampling timeis set as 119879119904 = 001 the initial conditions are given as(1199091(0) 1199092(0) 1199093(0)) = (minus5 1 minus3) (1199101(0) 1199102(0) 1199103(0)) =minus1 001 20 the parameters of sliding mode control andextended state observer are chosen as 1205821 = 10 1198870 = 51205731 = 60 1205732 = 200 1205733 = 001 1205721 = 05 1205722 = 025 1205723 = 0125120575 = 001 and 120590 = 546 the control parameter in SMC + ESOis given by 119896lowast = 12 the control parameters in ASMC + ESOare set as 119896119898 = 015 120598 = 001 and 120583 = 00001Case 1 (the controller 119906 works at initial time 119905 = 0) Thesimulation results are shown in Figures 1ndash5 Figure 1 provides
8 Mathematical Problems in Engineering
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus50
0
50
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 7 Observer errors of ESO in Case 2
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus20
0
20
40
Sync
hron
izat
ion
erro
r
minus10
0
10
20
Sync
hron
izat
ion
erro
r
Figure 8 Synchronization errors in Case 2
the synchronization performance of the system states Theobserver errors of ESO and synchronization errors are shownin Figures 2 and 3 respectively The control signal is givenby Figure 4 As shown in Figures 1ndash3 the compared twocontrol methods that is SMC + ESO and ASMC + ESOcan both achieve satisfactory chaos synchronization controlperformance the observer errors of ESO and system synchro-nization errors can rabidly converge to zero However fromFigure 4 we can see that the amplitude of ASMC + ESO issmaller than SMC + ESO and the chattering phenomenonof control signal in ASMC + ESO is also smaller when thesystem is stable The adaptation curve of the parameter 119896(119905)is shown in Figure 5 As can be seen from Figure 5 theparameter 119896(119905) converges to 82 which is slightly less than theparameter 119896lowast in SMC + ESO
Case 2 (the controller 119906 works at 119905 = 2119904) The parametersand initial conditions are all the same as those in Case 1for fair comparison The synchronization performance ofthe system states observer errors of ESO synchronizationerrors control signals and the adaptive parameter 119896(119905) areshown in Figures 6ndash10 respectively As can be seen fromFigures 6ndash8 the control input is delayed to be working by2 seconds and the error system is not well controlled byusing SMC + ESO however the ASMC + ESO can stillhave a good chaos synchronization control performance aftera slight chattering From Figure 9 we can clearly see thatthe chattering phenomenon of the control signal in SMC +ESO is significantly larger than that of ASMC + ESO Thereason is that for the fixed parameter 119896 in SMC + ESO thecondition that 119896lowast ge 1198893 +12058211198892 may not be always satisfied any
Mathematical Problems in Engineering 9
u (SMC + ESO)u (ASMC + ESO)
u
5 10 150Time
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
Figure 9 Control signals in Case 2
k
5 10 150Time (sec)
0
5
10
15
20
25
30
35
40
45
Figure 10 Adaptive parameter 119896(119905) in Case 2
more but the control parameter 119896(119905) in ASMC + ESO is anadaptive parameter which can always satisfy the conditionFrom Figure 10 it can be seen that the parameter 119896(119905) willconverge to 42 which is much larger than the setting value119896lowast = 12 in SMC + ESO
6 Conclusion
In this paper an adaptive sliding mode control methodusing extended state observer is presented to guarantee thesynchronization control performance for two chaotic PMSMsystems An adaptive parameter is designed for the controlgain to improve the suitability for different control situationand reduce the chattering in the control signal and theextended state observer is adopted to estimate the systemuncertainties The simulation results indicate that the system
can achieve a good synchronization control performance fordifferent initial conditions
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported by the Major Research Plan ofthe National Natural Science Foundation of China (Grantsnos 91438117 and 91538202) and National Natural ScienceFoundation of China (Grant no 61403343)
References
[1] I Ahmad A Bin Saaban A B Ibrahim and M ShahzadldquoGlobal chaos synchronization of new chaotic system usinglinear active controlrdquo Complexity vol 21 no 1 pp 379ndash3862015
[2] Q Chen X M Ren and J Na ldquoRobust finite-time chaossynchronization of uncertain permanent magnet synchronousmotorsrdquo ISA Transactions vol 58 no 1 pp 262ndash269 2015
[3] W L Ditto and S Sinha ldquoExploiting chaos for applicationsrdquoChaos vol 25 no 9 Article ID 097615 2015
[4] J Guan ldquoAdaptive modified generalized function projectionsynchronization between integer-order and fractional-orderchaotic systemsrdquo Optik vol 127 no 10 pp 4211ndash4216 2016
[5] J K Wang X Q Chen and J K Fu ldquoAdaptive finite-timecontrol of chaos in permanent magnet synchronousmotor withuncertain parametersrdquo Nonlinear Dynamics vol 78 no 2 pp1321ndash1328 2014
[6] Y-YHou ldquoFinite-time chaos suppression of permanentmagnetsynchronous motor systemsrdquo Entropy vol 16 no 4 pp 2234ndash2243 2014
[7] K L Su and C L Li ldquoChaos control of permanent magnetsynchronous motors via unidirectional correlationrdquo Optik vol125 no 14 pp 3693ndash3696 2014
[8] T-B-TNguyen T-L Liao and J-J Yan ldquoAdaptive slidingmodecontrol of chaos in permanent magnet synchronous motor viafuzzy neural networksrdquoMathematical Problems in Engineeringvol 2014 Article ID 868415 11 pages 2014
[9] X H Yang X P Liu L L Hu et al ldquoRobust sliding modevariable structure synchronization control of chaos in perma-nent magnet synchronous motorrdquo Modular Machine Tool andAutomatic Manufacturing Technique vol 1 no 8 pp 93ndash982012
[10] Q Chen Y-R Nan H-H Zheng and X-M Ren ldquoFull-orderslidingmode control of uncertain chaos in a permanentmagnetsynchronous motor based on a fuzzy extended state observerrdquoChinese Physics B vol 24 no 11 Article ID 110504 2015
[11] XHYang X P LiuH S Liu et al ldquoFuzzy sliding-mode controlin permanent magnet synchronous motorrdquo International Jour-nal of Digital Content Technology and its Applications vol 7 no1 pp 526ndash535 2013
[12] A Loria ldquoRobust linear control of (chaotic) permanent-magnetsynchronous motors with uncertaintiesrdquo IEEE Transactions onCircuits and Systems I Regular Papers vol 56 no 9 pp 2109ndash2122 2009
10 Mathematical Problems in Engineering
[13] S H Luo ldquoAdaptive fuzzy dynamic surface control for thechaotic permanent magnet synchronous motor using Nuss-baum gainrdquo Chaos vol 24 no 3 Article ID 033135 pp 5880ndash5885 2014
[14] S Luo ldquoNonlinear dynamic surface control of chaos in per-manent magnet synchronous motor based on the minimumweights of RBF neural networkrdquo Abstract and Applied Analysisvol 2014 Article ID 609340 9 pages 2014
[15] Q Wei X-Y Wang and X-P Hu ldquoOptimal control forpermanent magnet synchronous motorrdquo Journal of Vibrationand Control vol 20 no 8 pp 1176ndash1184 2014
[16] J Na Q Chen X M Ren and Y Guo ldquoAdaptive prescribedperformancemotion control of servomechanisms with frictioncompensationrdquo IEEE Transactions on Industrial Electronics vol61 no 1 pp 486ndash494 2014
[17] S Li M Zhou and X Yu ldquoDesign and implementationof terminal sliding mode control method for PMSM speedregulation systemrdquo IEEE Transactions on Industrial Informaticsvol 9 no 4 pp 1879ndash1891 2013
[18] S Yu X H Yu B Shirinzadeh and ZMan ldquoContinuous finite-time control for robotic manipulators with terminal slidingmoderdquo Automatica vol 41 no 11 pp 1957ndash1964 2005
[19] Q Chen L Yu and Y Nan ldquoFinite-time tracking control formotor servo systems with unknown dead-zonesrdquo Journal ofSystems Science amp Complexity vol 26 no 6 pp 940ndash956 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
x1
y1 (SMC + ESO)y1 (ASMC + ESO)
5 10 150Time
minus10
minus5
0
5Sy
stem
stat
e
(a) Synchronization of 1199091 1199101 for SMC + ESO and ASMC + ESO
x2
y2 (SMC + ESO)y2 (ASMC + ESO)
5 10 150Time
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
6
Syste
m st
ate
(b) Synchronization of 1199092 1199102 for SMC + ESO and ASMC + ESO
x3
y3 (SMC + ESO)y3 (ASMC + ESO)
5 10 150Time
minus5
0
5
10
15
20
Syste
m st
ate
(c) Synchronization of 1199093 1199103 for SMC + ESO and ASMC + ESO
Figure 1 Synchronization performance of the system states in Case 1
According to (15) and (18) the traditional sliding modecontroller using extended state observer (SMC + ESO)depicted in [17] is given by
119906lowast = 11198870 (minus1199113 minus 12058211199112 minus 119896
lowast sign (119904)) (19)
where 119896lowast gt 0 is a constant satisfying the condition that119896lowast ge 1198893 + 12058211198892 in which 1198892 and 1198893 are the upper boundsof estimation error
Unfortunately the control gain 119896lowast cannot be obtainedaccurately since the upper bounds 1198892 and 1198893 are difficultto be measured This may lead to a negative influence
on the system control performance To solve the probleman adaptive sliding mode controller using extended stateobserver (ASMC + ESO) is developed with the followingexpression
119906 = 11198870 (minus1199113 minus 12058211199112 minus 119896 sign (119904)) (20)
where 119896 = 119896(119905) is the adaptive control parameter designed as
= 119896119898 |119904| sign (|119904| minus 120598) 119896 gt 120583120583 119896 le 120583 (21)
Mathematical Problems in Engineering 5
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus20
0
20
40
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 2 Observer errors of ESO in Case 1
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus5
0
5
10Sy
nchr
oniz
atio
n er
ror
minus20
0
20
40
Sync
hron
izat
ion
erro
r
Figure 3 Synchronization errors in Case 1
with 119896119898 120598 and 120583 being small positive constants and used toguarantee 119896 gt 042 Stability Analysis Before the system stability analysisthe following two lemmas are introduced
Lemma 2 (see [18]) The parameter 119896(119905) has an upper boundin the nonlinear uncertain system (13) with the sliding modesurface (17) namely there exists a desired value 119896lowast gt 0 whichcan guarantee that 119896(119905) le 119896lowast forall119905 gt 0Lemma 3 (see [19]) Suppose there is a continuous positivedefinite function 119881(119905) which satisfies the following differentialfunction
(119905) le minus120572119881120578 (119905) forall119905 gt 0 119881 (1199050) gt 0 (22)
where 120572 gt 0 and 0 lt 120578 lt 1 are constants Then there existsa finite-time 1199051 for the given time 1199050 and we have the followinginequality and equality relationships
1198811minus120578 (119905) le 1198811minus120578 (1199050) minus 120572 (1 minus 120578) (119905 minus 1199050) 1199050 le 119905 le 1199051119881 (119905) equiv 0 forall119905 ge 1199051 (23)
where 1199051 = 1199050 + 1198811minus120578(1199050)120572(1 minus 120578)Theorem4 Considering the uncertain PMSM subsystem (13)the sliding mode surface (17) the controller (20) and theparameter adaptive law (21) the sliding surface 119904 can convergeto zero within a finite time
6 Mathematical Problems in Engineering
u (SMC + ESO)u (ASMC + ESO)
minus20
minus15
minus10
minus5
0u
5
10
15
20
25
5 10 150Time
Figure 4 Control signals in Case 1
5 10 150Time (sec)
0
1
2
3
4k
5
6
7
8
9
Figure 5 Adaptive parameter 119896(119905) in Case 1
Proof Define a Lyapunov function for system (13)
119881 = 121199042 +12120573 2 (24)
where = 119896 minus 119896lowastDifferentiating 119881 we have = 119904 119904 + 1120573 119896 = 119904 (1198923 + 1198870119906 + 12058211198922) +
1120573 (119896 minus 119896lowast) (25)
Substitute (20) into (25) and we can obtain
= 119904 [(1198923 minus 1199113) + 1205821 (1198922 minus 1199112) minus 119896 sign (119904)]+ 1120573 (119896 minus 119896lowast)
le |119904| (10038161003816100381610038161198923 minus 11991131003816100381610038161003816 + 1205821 10038161003816100381610038161198922 minus 11991121003816100381610038161003816) minus 119896 |119904| + 119896lowast |119904|minus 119896lowast |119904| + 1120573 (119896 minus 119896lowast)
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) |119904|+ 1120573 (119896 minus 119896lowast)
= minus [119896lowast minus (1198893 + 12058211198892)] |119904| + (119896 minus 119896lowast) ( 1120573 minus |119904|) (26)
Introducing a new parameter 120572119896 gt 0 (26) can be writtenas
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) (|119904| minus 1120573 )+ 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816
(27)
According to Lemma 2 and (27) it can be concluded that
le minus120572119889 |119904| minus 120585 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816= minusradic2120572119889 |119904|radic2 minus radic2120573120572119896
1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816radic2120573 minus 120585le minus12057211989811988112 minus 120585
(28)
where 120572119889 = 119896lowastminus(1198893+12058211198892) gt 0 120585 = ((1120573)minus|119904|minus120572119896)|119896minus119896lowast|and 120572119898 = minradic2120572119889 radic2120573120572119896
Since 120583 and 120576 are both small constants without loss ofgenerality we only discuss the situation for 119896 gt 120583 When 119896 gt120583 two different cases are discussed according to relationshipbetween |119904| and 120598
(a) When |119904| gt 120598 (21) can be rewritten as = 119896119898|119904| 120585 =((1120573)119896119898|119904| minus |119904| minus 120572119896)|119896 minus 119896lowast| Choosing 120573 lt 119896119898120598(120572119896 + 120598) wecan conclude 120585 gt 0
(b)When |119904| le 120598 we have = minus119896119898|119904| it can be concludedthat 120585 lt 0 lt 0 and 119896 is gradually decreasing Thus wecan obtain 119904 gt 0 when 119896 is reduced to 0 le 119896 le 1198893 + 12058211198892Consequently sliding mode 119904will increase and achieve to therange of |119904| gt 120598
Similarly we can guarantee 120585 gt 0 by choosing theappropriate parameter 120573 when 119896 gt 120583 Then from (28) andthe above discussion we have le minus12057211989811988112 According toLemma 3 there exists a finite-time 1199051 satisfying 119881(119905) equiv 0 as119905 ge 1199051 This can ensure the convergence of the sliding mode 119904within a finite time
Theorem5 Thestate variables 1198901 1198902 1198903 in error system (8)willconverge to zerowhen the states1198921 1198922 in system (13) achieve thesliding surface 119904 = 0Proof System (13) have invariant characteristics when thestates 1198921 1198922 achieve 119904 = 0 and from (14) and (17) we have1 + 12058211198921 = 0 Then solving the first-order differentialfunction we can obtain 1198921 = 119890minus1205821119905 which means that the
Mathematical Problems in Engineering 7
5 10 150Time
x1
y1 (SMC + ESO)y1 (ASMC + ESO)
minus10
minus8
minus6
minus4
minus2
0
2
4
6Sy
stem
stat
e
14835
1484
14845
126995 12712699
(a) Synchronization of 1199091 1199101 for SMC + ESO and ASMC + ESO
5 10 150Time
x2
y2 (SMC + ESO)y2 (ASMC + ESO)
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
6
8
Syste
m st
ate
131132133134
1253 12541252
(b) Synchronization of 1199092 1199102 for SMC + ESO and ASMC + ESO
5 10 150Time
minus5
0
5
10
15
20
Syste
m st
ate
x3
y3 (SMC + ESO)y3 (ASMC + ESO)
113275 1132811327
6276
6277
6278
(c) Synchronization of 1199093 1199103 for SMC + ESO and ASMC + ESO
Figure 6 Synchronization performance of the system states in Case 2
state 1198921 can converge to zero when time tends to infinityAlso according to (17) we have the similar result that 1198922 willconverge to zero when time tends to infinity
Consequently the state variables 1198901 1198902 1198903 in error system(8) have the following relationship according to (11) and (12)1198901 1198902 converge to zero and 1198903 = minus1198903 when time tends to infin-ity Thus we can conclude that 1198901 1198902 1198903 will asymptoticallystabilized to zero This completes the proof
5 Simulation
In order to verify the effectiveness of the proposed methoda traditional sliding mode control based on extended stateobserver (SMC + ESO) is adopted to compare with the
proposed adaptive control method (ASMC + ESO) Theinitial conditions and parameters in the simulations are setthe same for a fair comparison that is the sampling timeis set as 119879119904 = 001 the initial conditions are given as(1199091(0) 1199092(0) 1199093(0)) = (minus5 1 minus3) (1199101(0) 1199102(0) 1199103(0)) =minus1 001 20 the parameters of sliding mode control andextended state observer are chosen as 1205821 = 10 1198870 = 51205731 = 60 1205732 = 200 1205733 = 001 1205721 = 05 1205722 = 025 1205723 = 0125120575 = 001 and 120590 = 546 the control parameter in SMC + ESOis given by 119896lowast = 12 the control parameters in ASMC + ESOare set as 119896119898 = 015 120598 = 001 and 120583 = 00001Case 1 (the controller 119906 works at initial time 119905 = 0) Thesimulation results are shown in Figures 1ndash5 Figure 1 provides
8 Mathematical Problems in Engineering
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus50
0
50
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 7 Observer errors of ESO in Case 2
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus20
0
20
40
Sync
hron
izat
ion
erro
r
minus10
0
10
20
Sync
hron
izat
ion
erro
r
Figure 8 Synchronization errors in Case 2
the synchronization performance of the system states Theobserver errors of ESO and synchronization errors are shownin Figures 2 and 3 respectively The control signal is givenby Figure 4 As shown in Figures 1ndash3 the compared twocontrol methods that is SMC + ESO and ASMC + ESOcan both achieve satisfactory chaos synchronization controlperformance the observer errors of ESO and system synchro-nization errors can rabidly converge to zero However fromFigure 4 we can see that the amplitude of ASMC + ESO issmaller than SMC + ESO and the chattering phenomenonof control signal in ASMC + ESO is also smaller when thesystem is stable The adaptation curve of the parameter 119896(119905)is shown in Figure 5 As can be seen from Figure 5 theparameter 119896(119905) converges to 82 which is slightly less than theparameter 119896lowast in SMC + ESO
Case 2 (the controller 119906 works at 119905 = 2119904) The parametersand initial conditions are all the same as those in Case 1for fair comparison The synchronization performance ofthe system states observer errors of ESO synchronizationerrors control signals and the adaptive parameter 119896(119905) areshown in Figures 6ndash10 respectively As can be seen fromFigures 6ndash8 the control input is delayed to be working by2 seconds and the error system is not well controlled byusing SMC + ESO however the ASMC + ESO can stillhave a good chaos synchronization control performance aftera slight chattering From Figure 9 we can clearly see thatthe chattering phenomenon of the control signal in SMC +ESO is significantly larger than that of ASMC + ESO Thereason is that for the fixed parameter 119896 in SMC + ESO thecondition that 119896lowast ge 1198893 +12058211198892 may not be always satisfied any
Mathematical Problems in Engineering 9
u (SMC + ESO)u (ASMC + ESO)
u
5 10 150Time
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
Figure 9 Control signals in Case 2
k
5 10 150Time (sec)
0
5
10
15
20
25
30
35
40
45
Figure 10 Adaptive parameter 119896(119905) in Case 2
more but the control parameter 119896(119905) in ASMC + ESO is anadaptive parameter which can always satisfy the conditionFrom Figure 10 it can be seen that the parameter 119896(119905) willconverge to 42 which is much larger than the setting value119896lowast = 12 in SMC + ESO
6 Conclusion
In this paper an adaptive sliding mode control methodusing extended state observer is presented to guarantee thesynchronization control performance for two chaotic PMSMsystems An adaptive parameter is designed for the controlgain to improve the suitability for different control situationand reduce the chattering in the control signal and theextended state observer is adopted to estimate the systemuncertainties The simulation results indicate that the system
can achieve a good synchronization control performance fordifferent initial conditions
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported by the Major Research Plan ofthe National Natural Science Foundation of China (Grantsnos 91438117 and 91538202) and National Natural ScienceFoundation of China (Grant no 61403343)
References
[1] I Ahmad A Bin Saaban A B Ibrahim and M ShahzadldquoGlobal chaos synchronization of new chaotic system usinglinear active controlrdquo Complexity vol 21 no 1 pp 379ndash3862015
[2] Q Chen X M Ren and J Na ldquoRobust finite-time chaossynchronization of uncertain permanent magnet synchronousmotorsrdquo ISA Transactions vol 58 no 1 pp 262ndash269 2015
[3] W L Ditto and S Sinha ldquoExploiting chaos for applicationsrdquoChaos vol 25 no 9 Article ID 097615 2015
[4] J Guan ldquoAdaptive modified generalized function projectionsynchronization between integer-order and fractional-orderchaotic systemsrdquo Optik vol 127 no 10 pp 4211ndash4216 2016
[5] J K Wang X Q Chen and J K Fu ldquoAdaptive finite-timecontrol of chaos in permanent magnet synchronousmotor withuncertain parametersrdquo Nonlinear Dynamics vol 78 no 2 pp1321ndash1328 2014
[6] Y-YHou ldquoFinite-time chaos suppression of permanentmagnetsynchronous motor systemsrdquo Entropy vol 16 no 4 pp 2234ndash2243 2014
[7] K L Su and C L Li ldquoChaos control of permanent magnetsynchronous motors via unidirectional correlationrdquo Optik vol125 no 14 pp 3693ndash3696 2014
[8] T-B-TNguyen T-L Liao and J-J Yan ldquoAdaptive slidingmodecontrol of chaos in permanent magnet synchronous motor viafuzzy neural networksrdquoMathematical Problems in Engineeringvol 2014 Article ID 868415 11 pages 2014
[9] X H Yang X P Liu L L Hu et al ldquoRobust sliding modevariable structure synchronization control of chaos in perma-nent magnet synchronous motorrdquo Modular Machine Tool andAutomatic Manufacturing Technique vol 1 no 8 pp 93ndash982012
[10] Q Chen Y-R Nan H-H Zheng and X-M Ren ldquoFull-orderslidingmode control of uncertain chaos in a permanentmagnetsynchronous motor based on a fuzzy extended state observerrdquoChinese Physics B vol 24 no 11 Article ID 110504 2015
[11] XHYang X P LiuH S Liu et al ldquoFuzzy sliding-mode controlin permanent magnet synchronous motorrdquo International Jour-nal of Digital Content Technology and its Applications vol 7 no1 pp 526ndash535 2013
[12] A Loria ldquoRobust linear control of (chaotic) permanent-magnetsynchronous motors with uncertaintiesrdquo IEEE Transactions onCircuits and Systems I Regular Papers vol 56 no 9 pp 2109ndash2122 2009
10 Mathematical Problems in Engineering
[13] S H Luo ldquoAdaptive fuzzy dynamic surface control for thechaotic permanent magnet synchronous motor using Nuss-baum gainrdquo Chaos vol 24 no 3 Article ID 033135 pp 5880ndash5885 2014
[14] S Luo ldquoNonlinear dynamic surface control of chaos in per-manent magnet synchronous motor based on the minimumweights of RBF neural networkrdquo Abstract and Applied Analysisvol 2014 Article ID 609340 9 pages 2014
[15] Q Wei X-Y Wang and X-P Hu ldquoOptimal control forpermanent magnet synchronous motorrdquo Journal of Vibrationand Control vol 20 no 8 pp 1176ndash1184 2014
[16] J Na Q Chen X M Ren and Y Guo ldquoAdaptive prescribedperformancemotion control of servomechanisms with frictioncompensationrdquo IEEE Transactions on Industrial Electronics vol61 no 1 pp 486ndash494 2014
[17] S Li M Zhou and X Yu ldquoDesign and implementationof terminal sliding mode control method for PMSM speedregulation systemrdquo IEEE Transactions on Industrial Informaticsvol 9 no 4 pp 1879ndash1891 2013
[18] S Yu X H Yu B Shirinzadeh and ZMan ldquoContinuous finite-time control for robotic manipulators with terminal slidingmoderdquo Automatica vol 41 no 11 pp 1957ndash1964 2005
[19] Q Chen L Yu and Y Nan ldquoFinite-time tracking control formotor servo systems with unknown dead-zonesrdquo Journal ofSystems Science amp Complexity vol 26 no 6 pp 940ndash956 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus20
0
20
40
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 2 Observer errors of ESO in Case 1
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus5
0
5
10Sy
nchr
oniz
atio
n er
ror
minus20
0
20
40
Sync
hron
izat
ion
erro
r
Figure 3 Synchronization errors in Case 1
with 119896119898 120598 and 120583 being small positive constants and used toguarantee 119896 gt 042 Stability Analysis Before the system stability analysisthe following two lemmas are introduced
Lemma 2 (see [18]) The parameter 119896(119905) has an upper boundin the nonlinear uncertain system (13) with the sliding modesurface (17) namely there exists a desired value 119896lowast gt 0 whichcan guarantee that 119896(119905) le 119896lowast forall119905 gt 0Lemma 3 (see [19]) Suppose there is a continuous positivedefinite function 119881(119905) which satisfies the following differentialfunction
(119905) le minus120572119881120578 (119905) forall119905 gt 0 119881 (1199050) gt 0 (22)
where 120572 gt 0 and 0 lt 120578 lt 1 are constants Then there existsa finite-time 1199051 for the given time 1199050 and we have the followinginequality and equality relationships
1198811minus120578 (119905) le 1198811minus120578 (1199050) minus 120572 (1 minus 120578) (119905 minus 1199050) 1199050 le 119905 le 1199051119881 (119905) equiv 0 forall119905 ge 1199051 (23)
where 1199051 = 1199050 + 1198811minus120578(1199050)120572(1 minus 120578)Theorem4 Considering the uncertain PMSM subsystem (13)the sliding mode surface (17) the controller (20) and theparameter adaptive law (21) the sliding surface 119904 can convergeto zero within a finite time
6 Mathematical Problems in Engineering
u (SMC + ESO)u (ASMC + ESO)
minus20
minus15
minus10
minus5
0u
5
10
15
20
25
5 10 150Time
Figure 4 Control signals in Case 1
5 10 150Time (sec)
0
1
2
3
4k
5
6
7
8
9
Figure 5 Adaptive parameter 119896(119905) in Case 1
Proof Define a Lyapunov function for system (13)
119881 = 121199042 +12120573 2 (24)
where = 119896 minus 119896lowastDifferentiating 119881 we have = 119904 119904 + 1120573 119896 = 119904 (1198923 + 1198870119906 + 12058211198922) +
1120573 (119896 minus 119896lowast) (25)
Substitute (20) into (25) and we can obtain
= 119904 [(1198923 minus 1199113) + 1205821 (1198922 minus 1199112) minus 119896 sign (119904)]+ 1120573 (119896 minus 119896lowast)
le |119904| (10038161003816100381610038161198923 minus 11991131003816100381610038161003816 + 1205821 10038161003816100381610038161198922 minus 11991121003816100381610038161003816) minus 119896 |119904| + 119896lowast |119904|minus 119896lowast |119904| + 1120573 (119896 minus 119896lowast)
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) |119904|+ 1120573 (119896 minus 119896lowast)
= minus [119896lowast minus (1198893 + 12058211198892)] |119904| + (119896 minus 119896lowast) ( 1120573 minus |119904|) (26)
Introducing a new parameter 120572119896 gt 0 (26) can be writtenas
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) (|119904| minus 1120573 )+ 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816
(27)
According to Lemma 2 and (27) it can be concluded that
le minus120572119889 |119904| minus 120585 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816= minusradic2120572119889 |119904|radic2 minus radic2120573120572119896
1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816radic2120573 minus 120585le minus12057211989811988112 minus 120585
(28)
where 120572119889 = 119896lowastminus(1198893+12058211198892) gt 0 120585 = ((1120573)minus|119904|minus120572119896)|119896minus119896lowast|and 120572119898 = minradic2120572119889 radic2120573120572119896
Since 120583 and 120576 are both small constants without loss ofgenerality we only discuss the situation for 119896 gt 120583 When 119896 gt120583 two different cases are discussed according to relationshipbetween |119904| and 120598
(a) When |119904| gt 120598 (21) can be rewritten as = 119896119898|119904| 120585 =((1120573)119896119898|119904| minus |119904| minus 120572119896)|119896 minus 119896lowast| Choosing 120573 lt 119896119898120598(120572119896 + 120598) wecan conclude 120585 gt 0
(b)When |119904| le 120598 we have = minus119896119898|119904| it can be concludedthat 120585 lt 0 lt 0 and 119896 is gradually decreasing Thus wecan obtain 119904 gt 0 when 119896 is reduced to 0 le 119896 le 1198893 + 12058211198892Consequently sliding mode 119904will increase and achieve to therange of |119904| gt 120598
Similarly we can guarantee 120585 gt 0 by choosing theappropriate parameter 120573 when 119896 gt 120583 Then from (28) andthe above discussion we have le minus12057211989811988112 According toLemma 3 there exists a finite-time 1199051 satisfying 119881(119905) equiv 0 as119905 ge 1199051 This can ensure the convergence of the sliding mode 119904within a finite time
Theorem5 Thestate variables 1198901 1198902 1198903 in error system (8)willconverge to zerowhen the states1198921 1198922 in system (13) achieve thesliding surface 119904 = 0Proof System (13) have invariant characteristics when thestates 1198921 1198922 achieve 119904 = 0 and from (14) and (17) we have1 + 12058211198921 = 0 Then solving the first-order differentialfunction we can obtain 1198921 = 119890minus1205821119905 which means that the
Mathematical Problems in Engineering 7
5 10 150Time
x1
y1 (SMC + ESO)y1 (ASMC + ESO)
minus10
minus8
minus6
minus4
minus2
0
2
4
6Sy
stem
stat
e
14835
1484
14845
126995 12712699
(a) Synchronization of 1199091 1199101 for SMC + ESO and ASMC + ESO
5 10 150Time
x2
y2 (SMC + ESO)y2 (ASMC + ESO)
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
6
8
Syste
m st
ate
131132133134
1253 12541252
(b) Synchronization of 1199092 1199102 for SMC + ESO and ASMC + ESO
5 10 150Time
minus5
0
5
10
15
20
Syste
m st
ate
x3
y3 (SMC + ESO)y3 (ASMC + ESO)
113275 1132811327
6276
6277
6278
(c) Synchronization of 1199093 1199103 for SMC + ESO and ASMC + ESO
Figure 6 Synchronization performance of the system states in Case 2
state 1198921 can converge to zero when time tends to infinityAlso according to (17) we have the similar result that 1198922 willconverge to zero when time tends to infinity
Consequently the state variables 1198901 1198902 1198903 in error system(8) have the following relationship according to (11) and (12)1198901 1198902 converge to zero and 1198903 = minus1198903 when time tends to infin-ity Thus we can conclude that 1198901 1198902 1198903 will asymptoticallystabilized to zero This completes the proof
5 Simulation
In order to verify the effectiveness of the proposed methoda traditional sliding mode control based on extended stateobserver (SMC + ESO) is adopted to compare with the
proposed adaptive control method (ASMC + ESO) Theinitial conditions and parameters in the simulations are setthe same for a fair comparison that is the sampling timeis set as 119879119904 = 001 the initial conditions are given as(1199091(0) 1199092(0) 1199093(0)) = (minus5 1 minus3) (1199101(0) 1199102(0) 1199103(0)) =minus1 001 20 the parameters of sliding mode control andextended state observer are chosen as 1205821 = 10 1198870 = 51205731 = 60 1205732 = 200 1205733 = 001 1205721 = 05 1205722 = 025 1205723 = 0125120575 = 001 and 120590 = 546 the control parameter in SMC + ESOis given by 119896lowast = 12 the control parameters in ASMC + ESOare set as 119896119898 = 015 120598 = 001 and 120583 = 00001Case 1 (the controller 119906 works at initial time 119905 = 0) Thesimulation results are shown in Figures 1ndash5 Figure 1 provides
8 Mathematical Problems in Engineering
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus50
0
50
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 7 Observer errors of ESO in Case 2
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus20
0
20
40
Sync
hron
izat
ion
erro
r
minus10
0
10
20
Sync
hron
izat
ion
erro
r
Figure 8 Synchronization errors in Case 2
the synchronization performance of the system states Theobserver errors of ESO and synchronization errors are shownin Figures 2 and 3 respectively The control signal is givenby Figure 4 As shown in Figures 1ndash3 the compared twocontrol methods that is SMC + ESO and ASMC + ESOcan both achieve satisfactory chaos synchronization controlperformance the observer errors of ESO and system synchro-nization errors can rabidly converge to zero However fromFigure 4 we can see that the amplitude of ASMC + ESO issmaller than SMC + ESO and the chattering phenomenonof control signal in ASMC + ESO is also smaller when thesystem is stable The adaptation curve of the parameter 119896(119905)is shown in Figure 5 As can be seen from Figure 5 theparameter 119896(119905) converges to 82 which is slightly less than theparameter 119896lowast in SMC + ESO
Case 2 (the controller 119906 works at 119905 = 2119904) The parametersand initial conditions are all the same as those in Case 1for fair comparison The synchronization performance ofthe system states observer errors of ESO synchronizationerrors control signals and the adaptive parameter 119896(119905) areshown in Figures 6ndash10 respectively As can be seen fromFigures 6ndash8 the control input is delayed to be working by2 seconds and the error system is not well controlled byusing SMC + ESO however the ASMC + ESO can stillhave a good chaos synchronization control performance aftera slight chattering From Figure 9 we can clearly see thatthe chattering phenomenon of the control signal in SMC +ESO is significantly larger than that of ASMC + ESO Thereason is that for the fixed parameter 119896 in SMC + ESO thecondition that 119896lowast ge 1198893 +12058211198892 may not be always satisfied any
Mathematical Problems in Engineering 9
u (SMC + ESO)u (ASMC + ESO)
u
5 10 150Time
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
Figure 9 Control signals in Case 2
k
5 10 150Time (sec)
0
5
10
15
20
25
30
35
40
45
Figure 10 Adaptive parameter 119896(119905) in Case 2
more but the control parameter 119896(119905) in ASMC + ESO is anadaptive parameter which can always satisfy the conditionFrom Figure 10 it can be seen that the parameter 119896(119905) willconverge to 42 which is much larger than the setting value119896lowast = 12 in SMC + ESO
6 Conclusion
In this paper an adaptive sliding mode control methodusing extended state observer is presented to guarantee thesynchronization control performance for two chaotic PMSMsystems An adaptive parameter is designed for the controlgain to improve the suitability for different control situationand reduce the chattering in the control signal and theextended state observer is adopted to estimate the systemuncertainties The simulation results indicate that the system
can achieve a good synchronization control performance fordifferent initial conditions
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported by the Major Research Plan ofthe National Natural Science Foundation of China (Grantsnos 91438117 and 91538202) and National Natural ScienceFoundation of China (Grant no 61403343)
References
[1] I Ahmad A Bin Saaban A B Ibrahim and M ShahzadldquoGlobal chaos synchronization of new chaotic system usinglinear active controlrdquo Complexity vol 21 no 1 pp 379ndash3862015
[2] Q Chen X M Ren and J Na ldquoRobust finite-time chaossynchronization of uncertain permanent magnet synchronousmotorsrdquo ISA Transactions vol 58 no 1 pp 262ndash269 2015
[3] W L Ditto and S Sinha ldquoExploiting chaos for applicationsrdquoChaos vol 25 no 9 Article ID 097615 2015
[4] J Guan ldquoAdaptive modified generalized function projectionsynchronization between integer-order and fractional-orderchaotic systemsrdquo Optik vol 127 no 10 pp 4211ndash4216 2016
[5] J K Wang X Q Chen and J K Fu ldquoAdaptive finite-timecontrol of chaos in permanent magnet synchronousmotor withuncertain parametersrdquo Nonlinear Dynamics vol 78 no 2 pp1321ndash1328 2014
[6] Y-YHou ldquoFinite-time chaos suppression of permanentmagnetsynchronous motor systemsrdquo Entropy vol 16 no 4 pp 2234ndash2243 2014
[7] K L Su and C L Li ldquoChaos control of permanent magnetsynchronous motors via unidirectional correlationrdquo Optik vol125 no 14 pp 3693ndash3696 2014
[8] T-B-TNguyen T-L Liao and J-J Yan ldquoAdaptive slidingmodecontrol of chaos in permanent magnet synchronous motor viafuzzy neural networksrdquoMathematical Problems in Engineeringvol 2014 Article ID 868415 11 pages 2014
[9] X H Yang X P Liu L L Hu et al ldquoRobust sliding modevariable structure synchronization control of chaos in perma-nent magnet synchronous motorrdquo Modular Machine Tool andAutomatic Manufacturing Technique vol 1 no 8 pp 93ndash982012
[10] Q Chen Y-R Nan H-H Zheng and X-M Ren ldquoFull-orderslidingmode control of uncertain chaos in a permanentmagnetsynchronous motor based on a fuzzy extended state observerrdquoChinese Physics B vol 24 no 11 Article ID 110504 2015
[11] XHYang X P LiuH S Liu et al ldquoFuzzy sliding-mode controlin permanent magnet synchronous motorrdquo International Jour-nal of Digital Content Technology and its Applications vol 7 no1 pp 526ndash535 2013
[12] A Loria ldquoRobust linear control of (chaotic) permanent-magnetsynchronous motors with uncertaintiesrdquo IEEE Transactions onCircuits and Systems I Regular Papers vol 56 no 9 pp 2109ndash2122 2009
10 Mathematical Problems in Engineering
[13] S H Luo ldquoAdaptive fuzzy dynamic surface control for thechaotic permanent magnet synchronous motor using Nuss-baum gainrdquo Chaos vol 24 no 3 Article ID 033135 pp 5880ndash5885 2014
[14] S Luo ldquoNonlinear dynamic surface control of chaos in per-manent magnet synchronous motor based on the minimumweights of RBF neural networkrdquo Abstract and Applied Analysisvol 2014 Article ID 609340 9 pages 2014
[15] Q Wei X-Y Wang and X-P Hu ldquoOptimal control forpermanent magnet synchronous motorrdquo Journal of Vibrationand Control vol 20 no 8 pp 1176ndash1184 2014
[16] J Na Q Chen X M Ren and Y Guo ldquoAdaptive prescribedperformancemotion control of servomechanisms with frictioncompensationrdquo IEEE Transactions on Industrial Electronics vol61 no 1 pp 486ndash494 2014
[17] S Li M Zhou and X Yu ldquoDesign and implementationof terminal sliding mode control method for PMSM speedregulation systemrdquo IEEE Transactions on Industrial Informaticsvol 9 no 4 pp 1879ndash1891 2013
[18] S Yu X H Yu B Shirinzadeh and ZMan ldquoContinuous finite-time control for robotic manipulators with terminal slidingmoderdquo Automatica vol 41 no 11 pp 1957ndash1964 2005
[19] Q Chen L Yu and Y Nan ldquoFinite-time tracking control formotor servo systems with unknown dead-zonesrdquo Journal ofSystems Science amp Complexity vol 26 no 6 pp 940ndash956 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
u (SMC + ESO)u (ASMC + ESO)
minus20
minus15
minus10
minus5
0u
5
10
15
20
25
5 10 150Time
Figure 4 Control signals in Case 1
5 10 150Time (sec)
0
1
2
3
4k
5
6
7
8
9
Figure 5 Adaptive parameter 119896(119905) in Case 1
Proof Define a Lyapunov function for system (13)
119881 = 121199042 +12120573 2 (24)
where = 119896 minus 119896lowastDifferentiating 119881 we have = 119904 119904 + 1120573 119896 = 119904 (1198923 + 1198870119906 + 12058211198922) +
1120573 (119896 minus 119896lowast) (25)
Substitute (20) into (25) and we can obtain
= 119904 [(1198923 minus 1199113) + 1205821 (1198922 minus 1199112) minus 119896 sign (119904)]+ 1120573 (119896 minus 119896lowast)
le |119904| (10038161003816100381610038161198923 minus 11991131003816100381610038161003816 + 1205821 10038161003816100381610038161198922 minus 11991121003816100381610038161003816) minus 119896 |119904| + 119896lowast |119904|minus 119896lowast |119904| + 1120573 (119896 minus 119896lowast)
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) |119904|+ 1120573 (119896 minus 119896lowast)
= minus [119896lowast minus (1198893 + 12058211198892)] |119904| + (119896 minus 119896lowast) ( 1120573 minus |119904|) (26)
Introducing a new parameter 120572119896 gt 0 (26) can be writtenas
le minus [119896lowast minus (1198893 + 12058211198892)] |119904| minus (119896 minus 119896lowast) (|119904| minus 1120573 )+ 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816
(27)
According to Lemma 2 and (27) it can be concluded that
le minus120572119889 |119904| minus 120585 minus 120572119896 1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816= minusradic2120572119889 |119904|radic2 minus radic2120573120572119896
1003816100381610038161003816119896 minus 119896lowast1003816100381610038161003816radic2120573 minus 120585le minus12057211989811988112 minus 120585
(28)
where 120572119889 = 119896lowastminus(1198893+12058211198892) gt 0 120585 = ((1120573)minus|119904|minus120572119896)|119896minus119896lowast|and 120572119898 = minradic2120572119889 radic2120573120572119896
Since 120583 and 120576 are both small constants without loss ofgenerality we only discuss the situation for 119896 gt 120583 When 119896 gt120583 two different cases are discussed according to relationshipbetween |119904| and 120598
(a) When |119904| gt 120598 (21) can be rewritten as = 119896119898|119904| 120585 =((1120573)119896119898|119904| minus |119904| minus 120572119896)|119896 minus 119896lowast| Choosing 120573 lt 119896119898120598(120572119896 + 120598) wecan conclude 120585 gt 0
(b)When |119904| le 120598 we have = minus119896119898|119904| it can be concludedthat 120585 lt 0 lt 0 and 119896 is gradually decreasing Thus wecan obtain 119904 gt 0 when 119896 is reduced to 0 le 119896 le 1198893 + 12058211198892Consequently sliding mode 119904will increase and achieve to therange of |119904| gt 120598
Similarly we can guarantee 120585 gt 0 by choosing theappropriate parameter 120573 when 119896 gt 120583 Then from (28) andthe above discussion we have le minus12057211989811988112 According toLemma 3 there exists a finite-time 1199051 satisfying 119881(119905) equiv 0 as119905 ge 1199051 This can ensure the convergence of the sliding mode 119904within a finite time
Theorem5 Thestate variables 1198901 1198902 1198903 in error system (8)willconverge to zerowhen the states1198921 1198922 in system (13) achieve thesliding surface 119904 = 0Proof System (13) have invariant characteristics when thestates 1198921 1198922 achieve 119904 = 0 and from (14) and (17) we have1 + 12058211198921 = 0 Then solving the first-order differentialfunction we can obtain 1198921 = 119890minus1205821119905 which means that the
Mathematical Problems in Engineering 7
5 10 150Time
x1
y1 (SMC + ESO)y1 (ASMC + ESO)
minus10
minus8
minus6
minus4
minus2
0
2
4
6Sy
stem
stat
e
14835
1484
14845
126995 12712699
(a) Synchronization of 1199091 1199101 for SMC + ESO and ASMC + ESO
5 10 150Time
x2
y2 (SMC + ESO)y2 (ASMC + ESO)
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
6
8
Syste
m st
ate
131132133134
1253 12541252
(b) Synchronization of 1199092 1199102 for SMC + ESO and ASMC + ESO
5 10 150Time
minus5
0
5
10
15
20
Syste
m st
ate
x3
y3 (SMC + ESO)y3 (ASMC + ESO)
113275 1132811327
6276
6277
6278
(c) Synchronization of 1199093 1199103 for SMC + ESO and ASMC + ESO
Figure 6 Synchronization performance of the system states in Case 2
state 1198921 can converge to zero when time tends to infinityAlso according to (17) we have the similar result that 1198922 willconverge to zero when time tends to infinity
Consequently the state variables 1198901 1198902 1198903 in error system(8) have the following relationship according to (11) and (12)1198901 1198902 converge to zero and 1198903 = minus1198903 when time tends to infin-ity Thus we can conclude that 1198901 1198902 1198903 will asymptoticallystabilized to zero This completes the proof
5 Simulation
In order to verify the effectiveness of the proposed methoda traditional sliding mode control based on extended stateobserver (SMC + ESO) is adopted to compare with the
proposed adaptive control method (ASMC + ESO) Theinitial conditions and parameters in the simulations are setthe same for a fair comparison that is the sampling timeis set as 119879119904 = 001 the initial conditions are given as(1199091(0) 1199092(0) 1199093(0)) = (minus5 1 minus3) (1199101(0) 1199102(0) 1199103(0)) =minus1 001 20 the parameters of sliding mode control andextended state observer are chosen as 1205821 = 10 1198870 = 51205731 = 60 1205732 = 200 1205733 = 001 1205721 = 05 1205722 = 025 1205723 = 0125120575 = 001 and 120590 = 546 the control parameter in SMC + ESOis given by 119896lowast = 12 the control parameters in ASMC + ESOare set as 119896119898 = 015 120598 = 001 and 120583 = 00001Case 1 (the controller 119906 works at initial time 119905 = 0) Thesimulation results are shown in Figures 1ndash5 Figure 1 provides
8 Mathematical Problems in Engineering
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus50
0
50
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 7 Observer errors of ESO in Case 2
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus20
0
20
40
Sync
hron
izat
ion
erro
r
minus10
0
10
20
Sync
hron
izat
ion
erro
r
Figure 8 Synchronization errors in Case 2
the synchronization performance of the system states Theobserver errors of ESO and synchronization errors are shownin Figures 2 and 3 respectively The control signal is givenby Figure 4 As shown in Figures 1ndash3 the compared twocontrol methods that is SMC + ESO and ASMC + ESOcan both achieve satisfactory chaos synchronization controlperformance the observer errors of ESO and system synchro-nization errors can rabidly converge to zero However fromFigure 4 we can see that the amplitude of ASMC + ESO issmaller than SMC + ESO and the chattering phenomenonof control signal in ASMC + ESO is also smaller when thesystem is stable The adaptation curve of the parameter 119896(119905)is shown in Figure 5 As can be seen from Figure 5 theparameter 119896(119905) converges to 82 which is slightly less than theparameter 119896lowast in SMC + ESO
Case 2 (the controller 119906 works at 119905 = 2119904) The parametersand initial conditions are all the same as those in Case 1for fair comparison The synchronization performance ofthe system states observer errors of ESO synchronizationerrors control signals and the adaptive parameter 119896(119905) areshown in Figures 6ndash10 respectively As can be seen fromFigures 6ndash8 the control input is delayed to be working by2 seconds and the error system is not well controlled byusing SMC + ESO however the ASMC + ESO can stillhave a good chaos synchronization control performance aftera slight chattering From Figure 9 we can clearly see thatthe chattering phenomenon of the control signal in SMC +ESO is significantly larger than that of ASMC + ESO Thereason is that for the fixed parameter 119896 in SMC + ESO thecondition that 119896lowast ge 1198893 +12058211198892 may not be always satisfied any
Mathematical Problems in Engineering 9
u (SMC + ESO)u (ASMC + ESO)
u
5 10 150Time
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
Figure 9 Control signals in Case 2
k
5 10 150Time (sec)
0
5
10
15
20
25
30
35
40
45
Figure 10 Adaptive parameter 119896(119905) in Case 2
more but the control parameter 119896(119905) in ASMC + ESO is anadaptive parameter which can always satisfy the conditionFrom Figure 10 it can be seen that the parameter 119896(119905) willconverge to 42 which is much larger than the setting value119896lowast = 12 in SMC + ESO
6 Conclusion
In this paper an adaptive sliding mode control methodusing extended state observer is presented to guarantee thesynchronization control performance for two chaotic PMSMsystems An adaptive parameter is designed for the controlgain to improve the suitability for different control situationand reduce the chattering in the control signal and theextended state observer is adopted to estimate the systemuncertainties The simulation results indicate that the system
can achieve a good synchronization control performance fordifferent initial conditions
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported by the Major Research Plan ofthe National Natural Science Foundation of China (Grantsnos 91438117 and 91538202) and National Natural ScienceFoundation of China (Grant no 61403343)
References
[1] I Ahmad A Bin Saaban A B Ibrahim and M ShahzadldquoGlobal chaos synchronization of new chaotic system usinglinear active controlrdquo Complexity vol 21 no 1 pp 379ndash3862015
[2] Q Chen X M Ren and J Na ldquoRobust finite-time chaossynchronization of uncertain permanent magnet synchronousmotorsrdquo ISA Transactions vol 58 no 1 pp 262ndash269 2015
[3] W L Ditto and S Sinha ldquoExploiting chaos for applicationsrdquoChaos vol 25 no 9 Article ID 097615 2015
[4] J Guan ldquoAdaptive modified generalized function projectionsynchronization between integer-order and fractional-orderchaotic systemsrdquo Optik vol 127 no 10 pp 4211ndash4216 2016
[5] J K Wang X Q Chen and J K Fu ldquoAdaptive finite-timecontrol of chaos in permanent magnet synchronousmotor withuncertain parametersrdquo Nonlinear Dynamics vol 78 no 2 pp1321ndash1328 2014
[6] Y-YHou ldquoFinite-time chaos suppression of permanentmagnetsynchronous motor systemsrdquo Entropy vol 16 no 4 pp 2234ndash2243 2014
[7] K L Su and C L Li ldquoChaos control of permanent magnetsynchronous motors via unidirectional correlationrdquo Optik vol125 no 14 pp 3693ndash3696 2014
[8] T-B-TNguyen T-L Liao and J-J Yan ldquoAdaptive slidingmodecontrol of chaos in permanent magnet synchronous motor viafuzzy neural networksrdquoMathematical Problems in Engineeringvol 2014 Article ID 868415 11 pages 2014
[9] X H Yang X P Liu L L Hu et al ldquoRobust sliding modevariable structure synchronization control of chaos in perma-nent magnet synchronous motorrdquo Modular Machine Tool andAutomatic Manufacturing Technique vol 1 no 8 pp 93ndash982012
[10] Q Chen Y-R Nan H-H Zheng and X-M Ren ldquoFull-orderslidingmode control of uncertain chaos in a permanentmagnetsynchronous motor based on a fuzzy extended state observerrdquoChinese Physics B vol 24 no 11 Article ID 110504 2015
[11] XHYang X P LiuH S Liu et al ldquoFuzzy sliding-mode controlin permanent magnet synchronous motorrdquo International Jour-nal of Digital Content Technology and its Applications vol 7 no1 pp 526ndash535 2013
[12] A Loria ldquoRobust linear control of (chaotic) permanent-magnetsynchronous motors with uncertaintiesrdquo IEEE Transactions onCircuits and Systems I Regular Papers vol 56 no 9 pp 2109ndash2122 2009
10 Mathematical Problems in Engineering
[13] S H Luo ldquoAdaptive fuzzy dynamic surface control for thechaotic permanent magnet synchronous motor using Nuss-baum gainrdquo Chaos vol 24 no 3 Article ID 033135 pp 5880ndash5885 2014
[14] S Luo ldquoNonlinear dynamic surface control of chaos in per-manent magnet synchronous motor based on the minimumweights of RBF neural networkrdquo Abstract and Applied Analysisvol 2014 Article ID 609340 9 pages 2014
[15] Q Wei X-Y Wang and X-P Hu ldquoOptimal control forpermanent magnet synchronous motorrdquo Journal of Vibrationand Control vol 20 no 8 pp 1176ndash1184 2014
[16] J Na Q Chen X M Ren and Y Guo ldquoAdaptive prescribedperformancemotion control of servomechanisms with frictioncompensationrdquo IEEE Transactions on Industrial Electronics vol61 no 1 pp 486ndash494 2014
[17] S Li M Zhou and X Yu ldquoDesign and implementationof terminal sliding mode control method for PMSM speedregulation systemrdquo IEEE Transactions on Industrial Informaticsvol 9 no 4 pp 1879ndash1891 2013
[18] S Yu X H Yu B Shirinzadeh and ZMan ldquoContinuous finite-time control for robotic manipulators with terminal slidingmoderdquo Automatica vol 41 no 11 pp 1957ndash1964 2005
[19] Q Chen L Yu and Y Nan ldquoFinite-time tracking control formotor servo systems with unknown dead-zonesrdquo Journal ofSystems Science amp Complexity vol 26 no 6 pp 940ndash956 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
5 10 150Time
x1
y1 (SMC + ESO)y1 (ASMC + ESO)
minus10
minus8
minus6
minus4
minus2
0
2
4
6Sy
stem
stat
e
14835
1484
14845
126995 12712699
(a) Synchronization of 1199091 1199101 for SMC + ESO and ASMC + ESO
5 10 150Time
x2
y2 (SMC + ESO)y2 (ASMC + ESO)
minus12
minus10
minus8
minus6
minus4
minus2
0
2
4
6
8
Syste
m st
ate
131132133134
1253 12541252
(b) Synchronization of 1199092 1199102 for SMC + ESO and ASMC + ESO
5 10 150Time
minus5
0
5
10
15
20
Syste
m st
ate
x3
y3 (SMC + ESO)y3 (ASMC + ESO)
113275 1132811327
6276
6277
6278
(c) Synchronization of 1199093 1199103 for SMC + ESO and ASMC + ESO
Figure 6 Synchronization performance of the system states in Case 2
state 1198921 can converge to zero when time tends to infinityAlso according to (17) we have the similar result that 1198922 willconverge to zero when time tends to infinity
Consequently the state variables 1198901 1198902 1198903 in error system(8) have the following relationship according to (11) and (12)1198901 1198902 converge to zero and 1198903 = minus1198903 when time tends to infin-ity Thus we can conclude that 1198901 1198902 1198903 will asymptoticallystabilized to zero This completes the proof
5 Simulation
In order to verify the effectiveness of the proposed methoda traditional sliding mode control based on extended stateobserver (SMC + ESO) is adopted to compare with the
proposed adaptive control method (ASMC + ESO) Theinitial conditions and parameters in the simulations are setthe same for a fair comparison that is the sampling timeis set as 119879119904 = 001 the initial conditions are given as(1199091(0) 1199092(0) 1199093(0)) = (minus5 1 minus3) (1199101(0) 1199102(0) 1199103(0)) =minus1 001 20 the parameters of sliding mode control andextended state observer are chosen as 1205821 = 10 1198870 = 51205731 = 60 1205732 = 200 1205733 = 001 1205721 = 05 1205722 = 025 1205723 = 0125120575 = 001 and 120590 = 546 the control parameter in SMC + ESOis given by 119896lowast = 12 the control parameters in ASMC + ESOare set as 119896119898 = 015 120598 = 001 and 120583 = 00001Case 1 (the controller 119906 works at initial time 119905 = 0) Thesimulation results are shown in Figures 1ndash5 Figure 1 provides
8 Mathematical Problems in Engineering
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus50
0
50
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 7 Observer errors of ESO in Case 2
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus20
0
20
40
Sync
hron
izat
ion
erro
r
minus10
0
10
20
Sync
hron
izat
ion
erro
r
Figure 8 Synchronization errors in Case 2
the synchronization performance of the system states Theobserver errors of ESO and synchronization errors are shownin Figures 2 and 3 respectively The control signal is givenby Figure 4 As shown in Figures 1ndash3 the compared twocontrol methods that is SMC + ESO and ASMC + ESOcan both achieve satisfactory chaos synchronization controlperformance the observer errors of ESO and system synchro-nization errors can rabidly converge to zero However fromFigure 4 we can see that the amplitude of ASMC + ESO issmaller than SMC + ESO and the chattering phenomenonof control signal in ASMC + ESO is also smaller when thesystem is stable The adaptation curve of the parameter 119896(119905)is shown in Figure 5 As can be seen from Figure 5 theparameter 119896(119905) converges to 82 which is slightly less than theparameter 119896lowast in SMC + ESO
Case 2 (the controller 119906 works at 119905 = 2119904) The parametersand initial conditions are all the same as those in Case 1for fair comparison The synchronization performance ofthe system states observer errors of ESO synchronizationerrors control signals and the adaptive parameter 119896(119905) areshown in Figures 6ndash10 respectively As can be seen fromFigures 6ndash8 the control input is delayed to be working by2 seconds and the error system is not well controlled byusing SMC + ESO however the ASMC + ESO can stillhave a good chaos synchronization control performance aftera slight chattering From Figure 9 we can clearly see thatthe chattering phenomenon of the control signal in SMC +ESO is significantly larger than that of ASMC + ESO Thereason is that for the fixed parameter 119896 in SMC + ESO thecondition that 119896lowast ge 1198893 +12058211198892 may not be always satisfied any
Mathematical Problems in Engineering 9
u (SMC + ESO)u (ASMC + ESO)
u
5 10 150Time
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
Figure 9 Control signals in Case 2
k
5 10 150Time (sec)
0
5
10
15
20
25
30
35
40
45
Figure 10 Adaptive parameter 119896(119905) in Case 2
more but the control parameter 119896(119905) in ASMC + ESO is anadaptive parameter which can always satisfy the conditionFrom Figure 10 it can be seen that the parameter 119896(119905) willconverge to 42 which is much larger than the setting value119896lowast = 12 in SMC + ESO
6 Conclusion
In this paper an adaptive sliding mode control methodusing extended state observer is presented to guarantee thesynchronization control performance for two chaotic PMSMsystems An adaptive parameter is designed for the controlgain to improve the suitability for different control situationand reduce the chattering in the control signal and theextended state observer is adopted to estimate the systemuncertainties The simulation results indicate that the system
can achieve a good synchronization control performance fordifferent initial conditions
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported by the Major Research Plan ofthe National Natural Science Foundation of China (Grantsnos 91438117 and 91538202) and National Natural ScienceFoundation of China (Grant no 61403343)
References
[1] I Ahmad A Bin Saaban A B Ibrahim and M ShahzadldquoGlobal chaos synchronization of new chaotic system usinglinear active controlrdquo Complexity vol 21 no 1 pp 379ndash3862015
[2] Q Chen X M Ren and J Na ldquoRobust finite-time chaossynchronization of uncertain permanent magnet synchronousmotorsrdquo ISA Transactions vol 58 no 1 pp 262ndash269 2015
[3] W L Ditto and S Sinha ldquoExploiting chaos for applicationsrdquoChaos vol 25 no 9 Article ID 097615 2015
[4] J Guan ldquoAdaptive modified generalized function projectionsynchronization between integer-order and fractional-orderchaotic systemsrdquo Optik vol 127 no 10 pp 4211ndash4216 2016
[5] J K Wang X Q Chen and J K Fu ldquoAdaptive finite-timecontrol of chaos in permanent magnet synchronousmotor withuncertain parametersrdquo Nonlinear Dynamics vol 78 no 2 pp1321ndash1328 2014
[6] Y-YHou ldquoFinite-time chaos suppression of permanentmagnetsynchronous motor systemsrdquo Entropy vol 16 no 4 pp 2234ndash2243 2014
[7] K L Su and C L Li ldquoChaos control of permanent magnetsynchronous motors via unidirectional correlationrdquo Optik vol125 no 14 pp 3693ndash3696 2014
[8] T-B-TNguyen T-L Liao and J-J Yan ldquoAdaptive slidingmodecontrol of chaos in permanent magnet synchronous motor viafuzzy neural networksrdquoMathematical Problems in Engineeringvol 2014 Article ID 868415 11 pages 2014
[9] X H Yang X P Liu L L Hu et al ldquoRobust sliding modevariable structure synchronization control of chaos in perma-nent magnet synchronous motorrdquo Modular Machine Tool andAutomatic Manufacturing Technique vol 1 no 8 pp 93ndash982012
[10] Q Chen Y-R Nan H-H Zheng and X-M Ren ldquoFull-orderslidingmode control of uncertain chaos in a permanentmagnetsynchronous motor based on a fuzzy extended state observerrdquoChinese Physics B vol 24 no 11 Article ID 110504 2015
[11] XHYang X P LiuH S Liu et al ldquoFuzzy sliding-mode controlin permanent magnet synchronous motorrdquo International Jour-nal of Digital Content Technology and its Applications vol 7 no1 pp 526ndash535 2013
[12] A Loria ldquoRobust linear control of (chaotic) permanent-magnetsynchronous motors with uncertaintiesrdquo IEEE Transactions onCircuits and Systems I Regular Papers vol 56 no 9 pp 2109ndash2122 2009
10 Mathematical Problems in Engineering
[13] S H Luo ldquoAdaptive fuzzy dynamic surface control for thechaotic permanent magnet synchronous motor using Nuss-baum gainrdquo Chaos vol 24 no 3 Article ID 033135 pp 5880ndash5885 2014
[14] S Luo ldquoNonlinear dynamic surface control of chaos in per-manent magnet synchronous motor based on the minimumweights of RBF neural networkrdquo Abstract and Applied Analysisvol 2014 Article ID 609340 9 pages 2014
[15] Q Wei X-Y Wang and X-P Hu ldquoOptimal control forpermanent magnet synchronous motorrdquo Journal of Vibrationand Control vol 20 no 8 pp 1176ndash1184 2014
[16] J Na Q Chen X M Ren and Y Guo ldquoAdaptive prescribedperformancemotion control of servomechanisms with frictioncompensationrdquo IEEE Transactions on Industrial Electronics vol61 no 1 pp 486ndash494 2014
[17] S Li M Zhou and X Yu ldquoDesign and implementationof terminal sliding mode control method for PMSM speedregulation systemrdquo IEEE Transactions on Industrial Informaticsvol 9 no 4 pp 1879ndash1891 2013
[18] S Yu X H Yu B Shirinzadeh and ZMan ldquoContinuous finite-time control for robotic manipulators with terminal slidingmoderdquo Automatica vol 41 no 11 pp 1957ndash1964 2005
[19] Q Chen L Yu and Y Nan ldquoFinite-time tracking control formotor servo systems with unknown dead-zonesrdquo Journal ofSystems Science amp Complexity vol 26 no 6 pp 940ndash956 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
E01 (SMC + ESO)E01 (ASMC + ESO)
E02 (SMC + ESO)E02 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus4
minus2
0
2O
bser
ver e
rror
E03 (SMC + ESO)E03 (ASMC + ESO)
5 10 150Time
minus50
0
50
Obs
erve
r err
or
minus1000
minus500
0
500O
bser
ver e
rror
Figure 7 Observer errors of ESO in Case 2
e1 (SMC + ESO)e1 (ASMC + ESO)
e02 (SMC + ESO)e02 (ASMC + ESO)
5 10 150Time
e3 (SMC + ESO)e3 (ASMC + ESO)
5 10 150Time
5 10 150Time
minus5
0
5
10
Sync
hron
izat
ion
erro
r
minus20
0
20
40
Sync
hron
izat
ion
erro
r
minus10
0
10
20
Sync
hron
izat
ion
erro
r
Figure 8 Synchronization errors in Case 2
the synchronization performance of the system states Theobserver errors of ESO and synchronization errors are shownin Figures 2 and 3 respectively The control signal is givenby Figure 4 As shown in Figures 1ndash3 the compared twocontrol methods that is SMC + ESO and ASMC + ESOcan both achieve satisfactory chaos synchronization controlperformance the observer errors of ESO and system synchro-nization errors can rabidly converge to zero However fromFigure 4 we can see that the amplitude of ASMC + ESO issmaller than SMC + ESO and the chattering phenomenonof control signal in ASMC + ESO is also smaller when thesystem is stable The adaptation curve of the parameter 119896(119905)is shown in Figure 5 As can be seen from Figure 5 theparameter 119896(119905) converges to 82 which is slightly less than theparameter 119896lowast in SMC + ESO
Case 2 (the controller 119906 works at 119905 = 2119904) The parametersand initial conditions are all the same as those in Case 1for fair comparison The synchronization performance ofthe system states observer errors of ESO synchronizationerrors control signals and the adaptive parameter 119896(119905) areshown in Figures 6ndash10 respectively As can be seen fromFigures 6ndash8 the control input is delayed to be working by2 seconds and the error system is not well controlled byusing SMC + ESO however the ASMC + ESO can stillhave a good chaos synchronization control performance aftera slight chattering From Figure 9 we can clearly see thatthe chattering phenomenon of the control signal in SMC +ESO is significantly larger than that of ASMC + ESO Thereason is that for the fixed parameter 119896 in SMC + ESO thecondition that 119896lowast ge 1198893 +12058211198892 may not be always satisfied any
Mathematical Problems in Engineering 9
u (SMC + ESO)u (ASMC + ESO)
u
5 10 150Time
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
Figure 9 Control signals in Case 2
k
5 10 150Time (sec)
0
5
10
15
20
25
30
35
40
45
Figure 10 Adaptive parameter 119896(119905) in Case 2
more but the control parameter 119896(119905) in ASMC + ESO is anadaptive parameter which can always satisfy the conditionFrom Figure 10 it can be seen that the parameter 119896(119905) willconverge to 42 which is much larger than the setting value119896lowast = 12 in SMC + ESO
6 Conclusion
In this paper an adaptive sliding mode control methodusing extended state observer is presented to guarantee thesynchronization control performance for two chaotic PMSMsystems An adaptive parameter is designed for the controlgain to improve the suitability for different control situationand reduce the chattering in the control signal and theextended state observer is adopted to estimate the systemuncertainties The simulation results indicate that the system
can achieve a good synchronization control performance fordifferent initial conditions
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported by the Major Research Plan ofthe National Natural Science Foundation of China (Grantsnos 91438117 and 91538202) and National Natural ScienceFoundation of China (Grant no 61403343)
References
[1] I Ahmad A Bin Saaban A B Ibrahim and M ShahzadldquoGlobal chaos synchronization of new chaotic system usinglinear active controlrdquo Complexity vol 21 no 1 pp 379ndash3862015
[2] Q Chen X M Ren and J Na ldquoRobust finite-time chaossynchronization of uncertain permanent magnet synchronousmotorsrdquo ISA Transactions vol 58 no 1 pp 262ndash269 2015
[3] W L Ditto and S Sinha ldquoExploiting chaos for applicationsrdquoChaos vol 25 no 9 Article ID 097615 2015
[4] J Guan ldquoAdaptive modified generalized function projectionsynchronization between integer-order and fractional-orderchaotic systemsrdquo Optik vol 127 no 10 pp 4211ndash4216 2016
[5] J K Wang X Q Chen and J K Fu ldquoAdaptive finite-timecontrol of chaos in permanent magnet synchronousmotor withuncertain parametersrdquo Nonlinear Dynamics vol 78 no 2 pp1321ndash1328 2014
[6] Y-YHou ldquoFinite-time chaos suppression of permanentmagnetsynchronous motor systemsrdquo Entropy vol 16 no 4 pp 2234ndash2243 2014
[7] K L Su and C L Li ldquoChaos control of permanent magnetsynchronous motors via unidirectional correlationrdquo Optik vol125 no 14 pp 3693ndash3696 2014
[8] T-B-TNguyen T-L Liao and J-J Yan ldquoAdaptive slidingmodecontrol of chaos in permanent magnet synchronous motor viafuzzy neural networksrdquoMathematical Problems in Engineeringvol 2014 Article ID 868415 11 pages 2014
[9] X H Yang X P Liu L L Hu et al ldquoRobust sliding modevariable structure synchronization control of chaos in perma-nent magnet synchronous motorrdquo Modular Machine Tool andAutomatic Manufacturing Technique vol 1 no 8 pp 93ndash982012
[10] Q Chen Y-R Nan H-H Zheng and X-M Ren ldquoFull-orderslidingmode control of uncertain chaos in a permanentmagnetsynchronous motor based on a fuzzy extended state observerrdquoChinese Physics B vol 24 no 11 Article ID 110504 2015
[11] XHYang X P LiuH S Liu et al ldquoFuzzy sliding-mode controlin permanent magnet synchronous motorrdquo International Jour-nal of Digital Content Technology and its Applications vol 7 no1 pp 526ndash535 2013
[12] A Loria ldquoRobust linear control of (chaotic) permanent-magnetsynchronous motors with uncertaintiesrdquo IEEE Transactions onCircuits and Systems I Regular Papers vol 56 no 9 pp 2109ndash2122 2009
10 Mathematical Problems in Engineering
[13] S H Luo ldquoAdaptive fuzzy dynamic surface control for thechaotic permanent magnet synchronous motor using Nuss-baum gainrdquo Chaos vol 24 no 3 Article ID 033135 pp 5880ndash5885 2014
[14] S Luo ldquoNonlinear dynamic surface control of chaos in per-manent magnet synchronous motor based on the minimumweights of RBF neural networkrdquo Abstract and Applied Analysisvol 2014 Article ID 609340 9 pages 2014
[15] Q Wei X-Y Wang and X-P Hu ldquoOptimal control forpermanent magnet synchronous motorrdquo Journal of Vibrationand Control vol 20 no 8 pp 1176ndash1184 2014
[16] J Na Q Chen X M Ren and Y Guo ldquoAdaptive prescribedperformancemotion control of servomechanisms with frictioncompensationrdquo IEEE Transactions on Industrial Electronics vol61 no 1 pp 486ndash494 2014
[17] S Li M Zhou and X Yu ldquoDesign and implementationof terminal sliding mode control method for PMSM speedregulation systemrdquo IEEE Transactions on Industrial Informaticsvol 9 no 4 pp 1879ndash1891 2013
[18] S Yu X H Yu B Shirinzadeh and ZMan ldquoContinuous finite-time control for robotic manipulators with terminal slidingmoderdquo Automatica vol 41 no 11 pp 1957ndash1964 2005
[19] Q Chen L Yu and Y Nan ldquoFinite-time tracking control formotor servo systems with unknown dead-zonesrdquo Journal ofSystems Science amp Complexity vol 26 no 6 pp 940ndash956 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
u (SMC + ESO)u (ASMC + ESO)
u
5 10 150Time
minus5
minus4
minus3
minus2
minus1
0
1
2
3
4
5
Figure 9 Control signals in Case 2
k
5 10 150Time (sec)
0
5
10
15
20
25
30
35
40
45
Figure 10 Adaptive parameter 119896(119905) in Case 2
more but the control parameter 119896(119905) in ASMC + ESO is anadaptive parameter which can always satisfy the conditionFrom Figure 10 it can be seen that the parameter 119896(119905) willconverge to 42 which is much larger than the setting value119896lowast = 12 in SMC + ESO
6 Conclusion
In this paper an adaptive sliding mode control methodusing extended state observer is presented to guarantee thesynchronization control performance for two chaotic PMSMsystems An adaptive parameter is designed for the controlgain to improve the suitability for different control situationand reduce the chattering in the control signal and theextended state observer is adopted to estimate the systemuncertainties The simulation results indicate that the system
can achieve a good synchronization control performance fordifferent initial conditions
Competing Interests
The authors declare that they have no competing interests
Acknowledgments
This work was supported by the Major Research Plan ofthe National Natural Science Foundation of China (Grantsnos 91438117 and 91538202) and National Natural ScienceFoundation of China (Grant no 61403343)
References
[1] I Ahmad A Bin Saaban A B Ibrahim and M ShahzadldquoGlobal chaos synchronization of new chaotic system usinglinear active controlrdquo Complexity vol 21 no 1 pp 379ndash3862015
[2] Q Chen X M Ren and J Na ldquoRobust finite-time chaossynchronization of uncertain permanent magnet synchronousmotorsrdquo ISA Transactions vol 58 no 1 pp 262ndash269 2015
[3] W L Ditto and S Sinha ldquoExploiting chaos for applicationsrdquoChaos vol 25 no 9 Article ID 097615 2015
[4] J Guan ldquoAdaptive modified generalized function projectionsynchronization between integer-order and fractional-orderchaotic systemsrdquo Optik vol 127 no 10 pp 4211ndash4216 2016
[5] J K Wang X Q Chen and J K Fu ldquoAdaptive finite-timecontrol of chaos in permanent magnet synchronousmotor withuncertain parametersrdquo Nonlinear Dynamics vol 78 no 2 pp1321ndash1328 2014
[6] Y-YHou ldquoFinite-time chaos suppression of permanentmagnetsynchronous motor systemsrdquo Entropy vol 16 no 4 pp 2234ndash2243 2014
[7] K L Su and C L Li ldquoChaos control of permanent magnetsynchronous motors via unidirectional correlationrdquo Optik vol125 no 14 pp 3693ndash3696 2014
[8] T-B-TNguyen T-L Liao and J-J Yan ldquoAdaptive slidingmodecontrol of chaos in permanent magnet synchronous motor viafuzzy neural networksrdquoMathematical Problems in Engineeringvol 2014 Article ID 868415 11 pages 2014
[9] X H Yang X P Liu L L Hu et al ldquoRobust sliding modevariable structure synchronization control of chaos in perma-nent magnet synchronous motorrdquo Modular Machine Tool andAutomatic Manufacturing Technique vol 1 no 8 pp 93ndash982012
[10] Q Chen Y-R Nan H-H Zheng and X-M Ren ldquoFull-orderslidingmode control of uncertain chaos in a permanentmagnetsynchronous motor based on a fuzzy extended state observerrdquoChinese Physics B vol 24 no 11 Article ID 110504 2015
[11] XHYang X P LiuH S Liu et al ldquoFuzzy sliding-mode controlin permanent magnet synchronous motorrdquo International Jour-nal of Digital Content Technology and its Applications vol 7 no1 pp 526ndash535 2013
[12] A Loria ldquoRobust linear control of (chaotic) permanent-magnetsynchronous motors with uncertaintiesrdquo IEEE Transactions onCircuits and Systems I Regular Papers vol 56 no 9 pp 2109ndash2122 2009
10 Mathematical Problems in Engineering
[13] S H Luo ldquoAdaptive fuzzy dynamic surface control for thechaotic permanent magnet synchronous motor using Nuss-baum gainrdquo Chaos vol 24 no 3 Article ID 033135 pp 5880ndash5885 2014
[14] S Luo ldquoNonlinear dynamic surface control of chaos in per-manent magnet synchronous motor based on the minimumweights of RBF neural networkrdquo Abstract and Applied Analysisvol 2014 Article ID 609340 9 pages 2014
[15] Q Wei X-Y Wang and X-P Hu ldquoOptimal control forpermanent magnet synchronous motorrdquo Journal of Vibrationand Control vol 20 no 8 pp 1176ndash1184 2014
[16] J Na Q Chen X M Ren and Y Guo ldquoAdaptive prescribedperformancemotion control of servomechanisms with frictioncompensationrdquo IEEE Transactions on Industrial Electronics vol61 no 1 pp 486ndash494 2014
[17] S Li M Zhou and X Yu ldquoDesign and implementationof terminal sliding mode control method for PMSM speedregulation systemrdquo IEEE Transactions on Industrial Informaticsvol 9 no 4 pp 1879ndash1891 2013
[18] S Yu X H Yu B Shirinzadeh and ZMan ldquoContinuous finite-time control for robotic manipulators with terminal slidingmoderdquo Automatica vol 41 no 11 pp 1957ndash1964 2005
[19] Q Chen L Yu and Y Nan ldquoFinite-time tracking control formotor servo systems with unknown dead-zonesrdquo Journal ofSystems Science amp Complexity vol 26 no 6 pp 940ndash956 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
[13] S H Luo ldquoAdaptive fuzzy dynamic surface control for thechaotic permanent magnet synchronous motor using Nuss-baum gainrdquo Chaos vol 24 no 3 Article ID 033135 pp 5880ndash5885 2014
[14] S Luo ldquoNonlinear dynamic surface control of chaos in per-manent magnet synchronous motor based on the minimumweights of RBF neural networkrdquo Abstract and Applied Analysisvol 2014 Article ID 609340 9 pages 2014
[15] Q Wei X-Y Wang and X-P Hu ldquoOptimal control forpermanent magnet synchronous motorrdquo Journal of Vibrationand Control vol 20 no 8 pp 1176ndash1184 2014
[16] J Na Q Chen X M Ren and Y Guo ldquoAdaptive prescribedperformancemotion control of servomechanisms with frictioncompensationrdquo IEEE Transactions on Industrial Electronics vol61 no 1 pp 486ndash494 2014
[17] S Li M Zhou and X Yu ldquoDesign and implementationof terminal sliding mode control method for PMSM speedregulation systemrdquo IEEE Transactions on Industrial Informaticsvol 9 no 4 pp 1879ndash1891 2013
[18] S Yu X H Yu B Shirinzadeh and ZMan ldquoContinuous finite-time control for robotic manipulators with terminal slidingmoderdquo Automatica vol 41 no 11 pp 1957ndash1964 2005
[19] Q Chen L Yu and Y Nan ldquoFinite-time tracking control formotor servo systems with unknown dead-zonesrdquo Journal ofSystems Science amp Complexity vol 26 no 6 pp 940ndash956 2013
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of