
Reporte Proyecto Final Instrumentacion
40
INSTITUTO TECNOLÓGICO DE LEÓN. Túnel de Viento. Reporte Final De Proyecto. Ortega Aguilar Juan Francisco. Mena Guzmán Nicolás Rafael. Ramírez Ortega José De Jesús.
-
Upload
deathcore-ortega -
Category
Documents
-
view
56 -
download
2
Transcript of Reporte Proyecto Final Instrumentacion
INSTITUTO TECNOLÓGICO DE LEÓN.
Reporte Final De Proyecto.
Ortega Aguilar Juan Francisco. Mena Guzmán Nicolás Rafael. Ramírez Ortega José De Jesús.
10 de diciembre de 2012

Introducción.
En ingeniería, un túnel de viento o túnel aerodinámico es una herramienta de investigación desarrollada para ayudar en el estudio de los efectos del movimiento del aire alrededor de objetos sólidos. Con esta herramienta se simulan las condiciones que experimentará el objeto de la investigación en una situación real.En un túnel de viento, el objeto o modelo, permanece estacionario mientras se propulsa el paso de aire o gas alrededor de él. Se utiliza para estudiar los fenómenos que se manifiestan cuando el aire baña objetos como aviones, naves espaciales, misiles, automóviles, edificios o puentes.
El presente proyecto se orienta al desarrollo y diseño de un túnel de viento con un sistema de medición de fuerzas en 2 dimensiones, realizando estas mediciones mediante el uso en conjunto de software de programación de alto nivel y hardware de código abierto, en este caso usamos MATLAB en conjunto con la tarjeta arduino uno.
El diseño del circuito y la fase de control se realizo tomando en base las compatibilidades de ambos lenguajes de programación, así como los requisitos que se necesitaban cumplir para poder ofrecer un prototipo funcional, barato y útil.
Objetivos.
Aplicar los conocimientos obtenidos en la materia de instrumentación para implementar un sensor de fuerzas dentro de la cámara de pruebas de un túnel de viento.
Justificación.
El presente proyecto se realizo con el fin de proponer un nuevo instrumento de medición útil para pruebas dentro de la cámara de pruebas de un túnel de viento, basados en los conocimientos de instrumentación e instrumentación virtual adquiridos durante el curso.

Marco Teórico
Túnel de viento.
Un túnel de viento es una herramienta de investigación desarrollada para ayudar en el estudio de los efectos del movimiento del aire alrededor de objetos sólidos, dentro de la cámara de pruebas de este, se simulan las condiciones reales a las cuales están sujetas estos, en un túnel de viento, el objeto o modelo permanece en un estado estacionario, mientras pasa aire o gas alrededor de este, por lo general se utiliza para estudiar fenómenos en los cuales están inmersos el flujo constante de aire sobre un perfil liso, estos pueden ser aviones, automóviles, edificios, etcétera.
¿Cómo funciona un túnel de viento?
El aire es soplado o aspirado a través de un conducto equipado con rejillas estabilizadoras al comienzo para garantizar que el flujo se comporte de manera laminar o con obstáculos u otros objetos si se desea que se comporte de forma turbulenta. Los modelos se montan para su estudio en un equipo llamado balanza a la cual están adosados los sensores que brindan la información necesaria para calcular los coeficientes de sustentación y resistencia, necesarios para conocer si es factible o no emplear el modelo en la vida real. Además son empleados otros dispositivos para registrar la diferencia de presiones en la superficie del modelo en cuestión. Los resultados prácticos deben ser comparados con los resultados teóricos, teniendo fundamentalmente en cuenta el Número de Reynolds y el Número Mach que constituyen los criterios de validación en las pruebas con modelos a escala.
Otras pruebas realizadas en túneles de viento
Pueden unirse hebras a la superficie de estudio para detectar la dirección del flujo de aire y su velocidad relativa.
Pueden inyectarse tintes o humo en el flujo de aire para observar el movimiento de las partículas, o sea, como se turbulizan al pasar por la superficie.
Pueden insertarse sondas en puntos específicos del flujo de aire para medir la presión estática y dinámica del aire.
Teoría de empleo de los túneles de viento
Todos los equipos y sistemas inventados por el hombre se rigen por leyes físicas fundamentales que permiten su utilidad en la sociedad. Para un túnel aerodinámico el principio fundamental que se pone de manifiesto es el de reversibilidad del movimiento. De acuerdo a éste, en lugar de observar el movimiento de un cuerpo en su medio inmóvil, podemos observar el movimiento del medio con relación al cuerpo inmóvil. En este caso, la velocidad del flujo no perturbado en un medio reversible será igual a la velocidad del mismo cuerpo cuando el aire está inmóvil.
La posibilidad de reversibilidad del movimiento es debido a que las fuerzas aerodinámicas dependen solo del movimiento relativo del cuerpo y el aire. Cuando se proyecta cualquier tipo de avión surgen gran cantidad de problemas técnicos a resolver de forma experimental. Las aeronaves cada vez son más complejas, sus dimensiones también aumentan por lo que dificulta su experimentación a escala natural.
Todo esto, más el costo de los medios para realizar tales experimentos hace que en la aerodinámica sea muy empleado el método de modelación y simulación para la experimentación en condiciones de laboratorios, los cuales por lo general están muy lejos de las condiciones reales. Los experimentos deben simular el fenómeno de tal forma, que después sea menos complejo al proceso de modelación el cual nos permitió obtener los resultados con buen grado de aproximación a las condiciones naturales. Para lograr un proceso de modelado y simulación óptimo respecto a las condiciones reales de trabajo del objeto deben cumplirse las condiciones planteadas en la Teoría de las semejanzas.
Es necesario aclarar que para aplicaciones limitadas, la Dinámica de Fluidos Computacional (CFD, según sus siglas en inglés) puede mejorar y posiblemente reemplazar el uso de túneles de viento. Sin embargo, debe notarse que, para situaciones dónde el flujo turbulento externo está presente, el CFD no es práctico en la mayoría de los casos. Por ejemplo, las áreas que todavía son demasiado complejas para el uso de CFD están determinadas por los efectos de flujo que se observan delante y alrededor de las estructuras, puentes, terreno, etc.
La manera más eficaz de simular al flujo turbulento es mediante el uso de un túnel aerodinámico de capa límite. Los túneles aerodinámicos de capa límite son el método por excelencia de probar el flujo externo y la mayoría de los expertos están de acuerdo que esto se sostendrá hasta el futuro previsible.
Estos túneles además de ser empleados por la industria aeronáutica, son los empleados para comprobar cómo se comportarán edificaciones, puentes y todo tipo de estructuras que puedan recibir la influencia peligrosa de ráfagas de viento turbulentas.
Aunque hay muchos tipos de túneles aerodinámicos, en general pueden definirse como conductos que llevan en alguna parte de su trayectoria un ventilador accionado por un motor, que se encarga de que el aire fluya de manera constante. Usualmente las palas del ventilador son diseñadas según el tipo de túnel que se construirá, de manera similar a como se hacen las de los aviones. El túnel posee una entrada convergente y una salida divergente. La parte de más interés para la experimentación es la sección de prueba o garganta, que debe, generalmente, ser transparente, para permitir la observación e incluso la filmación; en ella se instala el modelo y diferentes elementos que permiten la medición de las fuerzas que experimenta este y las condiciones del aire que atraviesa esa sección. Resulta de interés que la sección de prueba sea la de menor área, ya que, debido a la ley de conservación de la masa, genera una mayor velocidad cerca del modelo; ahorrando energía en el ventilador, ya que será capaz de generar el mismo efecto

en la sección de prueba para potencias menores, además de que reduce las pérdidas por fricción en las paredes y codos del túnel.
Clasificación de los túneles de viento.
Los túneles de viento se clasifican en función de varios aspectos los cuales son:
Por la circulación del aire en su interior
Abierto: se toma el aire directamente de la atmósfera y después de hacerlo pasar por la cámara de ensayo se devuelve nuevamente a ella.
Cerrado: el aire circula varias veces por la cámara, recuperando por medio de un difusor su energía fluida, antes de llegar de nuevo a la zona donde se encuentra instalado el difusor.
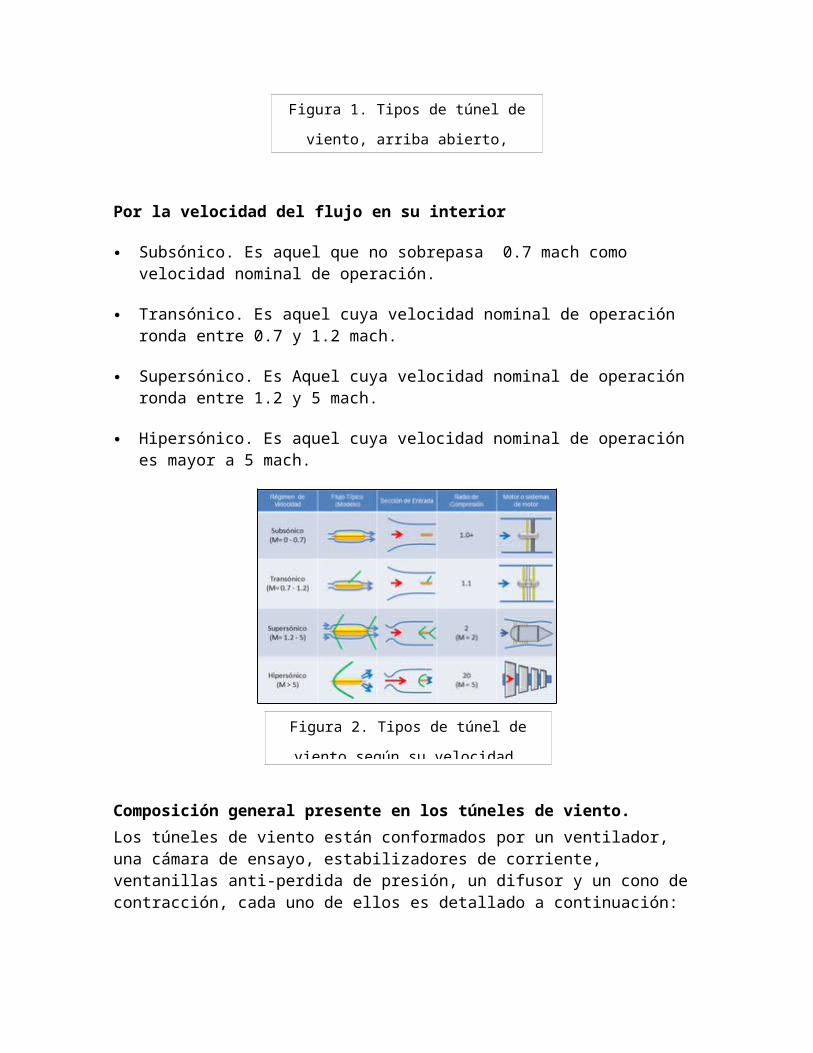
Por la velocidad del flujo en su interior
Subsónico. Es aquel que no sobrepasa 0.7 mach como velocidad nominal de operación.
Transónico. Es aquel cuya velocidad nominal de operación ronda entre 0.7 y 1.2 mach.
Supersónico. Es Aquel cuya velocidad nominal de operación ronda entre 1.2 y 5 mach.
Hipersónico. Es aquel cuya velocidad nominal de operación es mayor a 5 mach.
Figura 1. Tipos de túnel de viento, arriba
abierto, abajo cerrado.

Composición general presente en los túneles de viento.
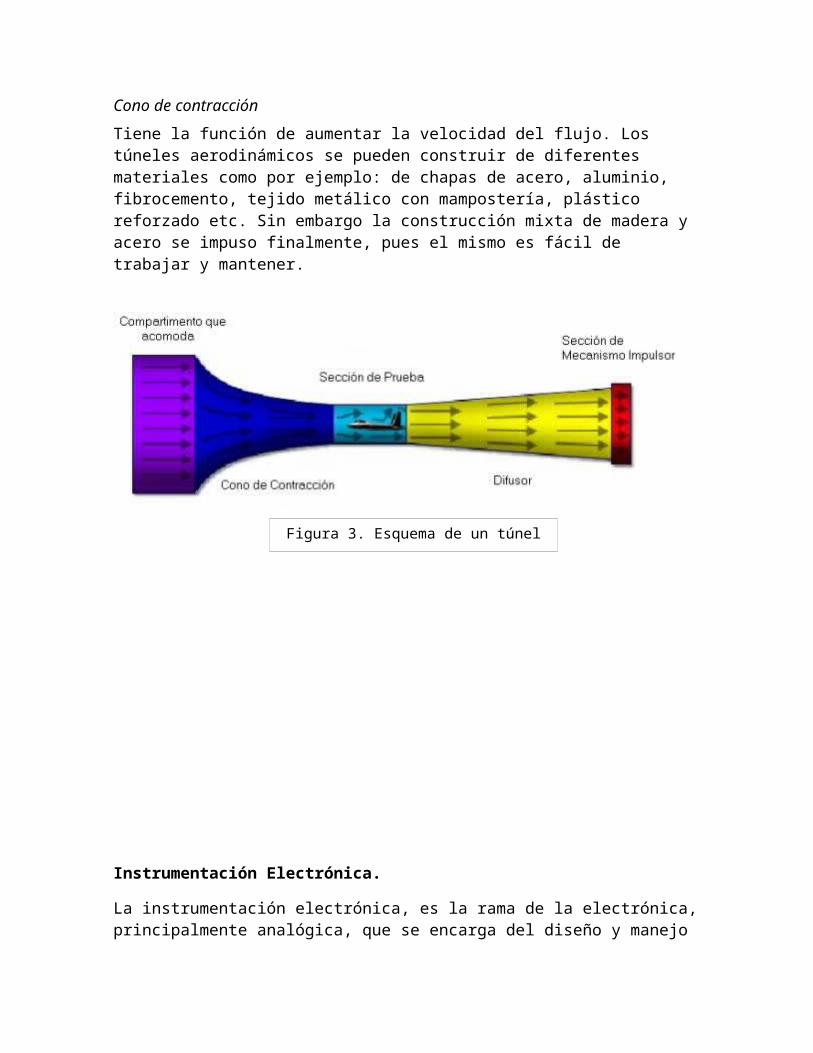
Los túneles de viento están conformados por un ventilador, una cámara de ensayo, estabilizadores de corriente, ventanillas anti-perdida de presión, un difusor y un cono de contracción, cada uno de ellos es detallado a continuación:
Ventilador
Produce la corriente de aire del circuito en el que se desarrolla la circulación de aire.
Cámara de ensayos
En la que se sitúa el modelo experimental a probar. El tamaño de la cámara de ensayo es una de las características más importante de un túnel, ya que una de grandes dimensiones permite probar modelos sin gran reducción de escala con respecto al original, lo que permite mantener el índice de semejanza del número de Reynolds.
Estabilizadores de corriente tras el ventilador
Con el fin de que quede anulada la rotación comunicada por el ventilador.
Ventanillas anti-perdida de presión.
Ventanillas o rejillas que permiten el equilibrio de las presiones y evitan las oscilaciones críticas de las mismas.
Figura 2. Tipos de túnel de viento según su
velocidad.
Difusor
Con el objetivo de reducir la velocidad expandiendo el fluido y recuperando la presión estática, el difusor está dividido en dos partes por el ventilador. Los difusores son muy sensibles a errores de diseño, pueden crear separación de la capa límite de manera intermitente o estable que es difícil de detectar y pueden crear vibraciones en el túnel, oscilación en el ventilador y variación en la velocidad de la sección de prueba. Hay que tener en cuenta que el aire que llega al difusor no es laminar, el aire que sale de la sección de prueba no es uniforme lo que hace cada vez más difícil el trabajo del difusor.
Cono de contracción
Tiene la función de aumentar la velocidad del flujo. Los túneles aerodinámicos se pueden construir de diferentes materiales como por ejemplo: de chapas de acero, aluminio, fibrocemento, tejido metálico con mampostería, plástico reforzado etc. Sin embargo la construcción mixta de madera y acero se impuso finalmente, pues el mismo es fácil de trabajar y mantener.
Figura 3. Esquema de un túnel de viento.

Instrumentación Electrónica.
La instrumentación electrónica, es la rama de la electrónica, principalmente analógica, que se encarga del diseño y manejo de aparatos electrónicos y eléctricos para su uso en mediciones. La instrumentación electrónica se aplica en el censado y procesamiento de información proveniente de variables físicas y químicas, a partir de las cuales se realiza el monitoreo y control de procesos, empleado para esto dispositivos y tecnologías electrónicas.
Sensores.
Un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, movimiento o pH. Una magnitud eléctrica puede ser una resistencia eléctrica, una capacidad eléctrica, una Tensión eléctrica, una corriente eléctrica entre otras.
Un sensor se diferencia de un transductor en que el sensor está siempre en contacto con la variable de instrumentación con lo que puede decirse también que es un dispositivo que aprovecha una de sus propiedades con el fin de adaptar la señal que mide para que la pueda interpretar otro dispositivo.
Características De Un Sensor.
Rango de medida: dominio en la magnitud medida en el que puede aplicarse el sensor.
Precisión: es el error de medida máximo esperado. Offset o desviación de cero: valor de la variable de salida cuando la variable de
entrada es nula. Si el rango de medida no llega a valores nulos de la variable de entrada, habitualmente se establece otro punto de referencia para definir el offset.
Linealidad o correlación lineal. Sensibilidad de un sensor: suponiendo que es de entrada a salida y la
variación de la magnitud de entrada. Resolución: mínima variación de la magnitud de entrada que puede apreciarse
a la salida. Rapidez de respuesta: puede ser un tiempo fijo o depender de cuánto varíe la
magnitud a medir. Depende de la capacidad del sistema para seguir las variaciones de la magnitud de entrada.
Derivas: son otras magnitudes, aparte de la medida como magnitud de entrada, que influyen en la variable de salida. Por ejemplo, pueden ser condiciones ambientales, como la humedad, la temperatura u otras como el envejecimiento (oxidación, desgaste, etc.) del sensor.
Repetitividad: error esperado al repetir varias veces la misma medida.
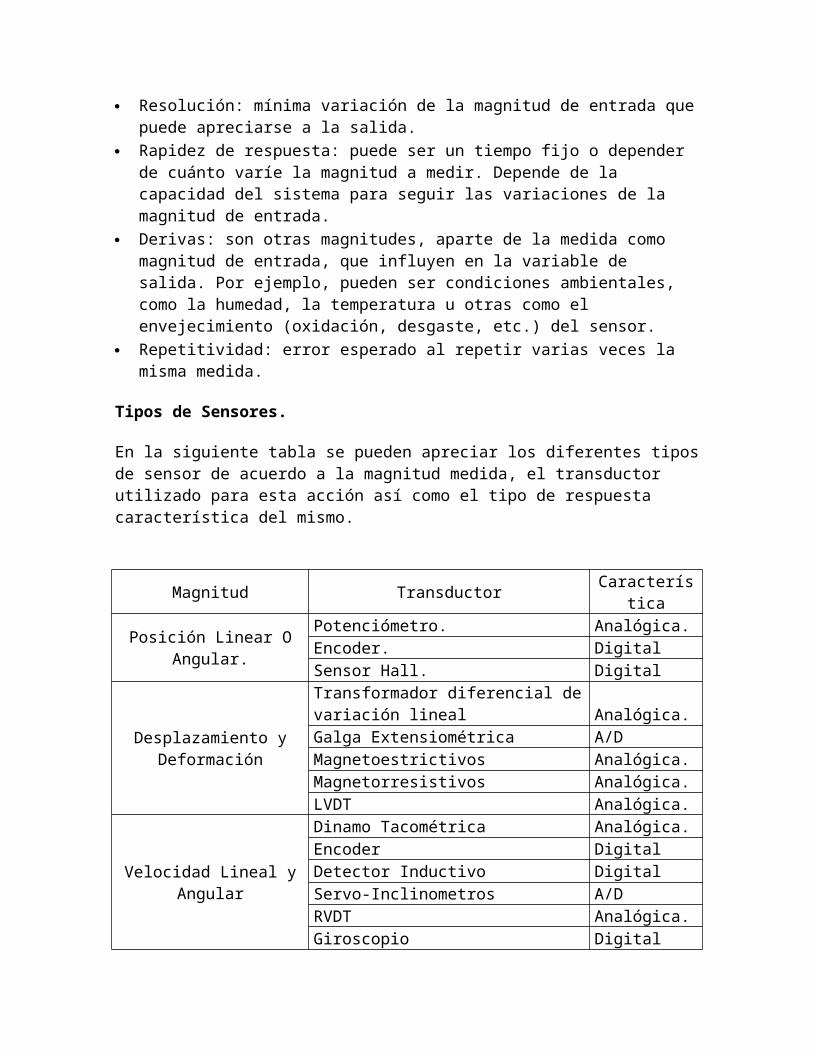
Tipos de Sensores.
En la siguiente tabla se pueden apreciar los diferentes tipos de sensor de acuerdo a la magnitud medida, el transductor utilizado para esta acción así como el tipo de respuesta característica del mismo.
Magnitud Transductor Característica
Posición Linear O Angular.
Potenciómetro. Analógica.Encoder. DigitalSensor Hall. Digital
Desplazamiento y Deformación
Transformador diferencial de variación lineal Analógica.Galga Extensiométrica A/DMagnetoestrictivos Analógica.Magnetorresistivos Analógica.LVDT Analógica.
Velocidad Lineal y Angular
Dinamo Tacométrica Analógica.Encoder DigitalDetector Inductivo DigitalServo-Inclinometros A/DRVDT Analógica.Giroscopio Digital
AceleraciónAcelerómetro Analógica.Servo-Acelerómetros
Fuerza y par.Galga Extensiométrica Analógica.Triaxiales A/D
PresiónMembranas Analógica.Piezoeléctricos Analógica.Manómetros Digitales Digital
CaudalTurbina Analógica.Magnético Analógica.
Temperatura
Termopar Analógica.RTD Analógica.Termistor NTC Analógica.Termistor PTC Analógica.Bimetal/Termostato I/O
Sensores De Presencia
Inductivos I/OCapacitivos I/O
ÓpticosI/O y Analógica
Sensores De LuzFotodiodo Analógica.Fotorresistencia Analógica.Fototransistor Analógica.
Célula Fotoeléctrica Analógica.
Sensores de Proximidad
Final de carrera Inductivos Analógica.Capacitivos Analógica.Fotoeléctrico Analógica.
Sensor Acústico Micrófono Analógica.
Sensores TáctilesMatriz de contacto I/OPiel Artificial Analógica.
Visión Artificial.Cámaras De Video
Procesamiento
Cámaras CCD o CMOSProcesamiento
Algunas de las magnitudes pueden calcularse mediante la medición y calculo de otras, un ejemplo, la velocidad de un móvil puede calcularse a partir de la integración de manera numérica de su aceleración, o la masa de un objeto puede obtenerse a partir de la fuerza gravitatoria que se ejerce sobre él, en comparación con la fuerza gravitatoria ejercida sobre un patrón.
Acondicionadores.
La señal de salida de un sensor no suele ser válida para su procesado. Por lo general requiere de una amplificación para adaptar sus niveles a los del resto de la circuitería. Un ejemplo de amplificador es el amplificador de instrumentación, que es muy inmune a cierto tipo de ruido.
No sólo hay que adaptar niveles, también puede que la salida del sensor no sea lineal o incluso que ésta dependa de las condiciones de funcionamiento, por lo que hay que linealizar el sensor y compensar sus variaciones. La compensación puede ser hardware o software, en este último caso ya no es parte del acondicionador.
Otras veces la información de la señal no está en su nivel de tensión, puede que esté en su frecuencia, su corriente o en algún otro parámetro, por lo que también se pueden necesitar de moduladores, filtros o convertidores corriente-tensión. Un ejemplo de cuando la información no está en el nivel de tensión puede ser un sensor capacitivo, en el que se necesita que tenga una señal variable en el tiempo.
Un ejemplo clásico de acondicionador es el puente de Wheatstone, en el que se sustituyen una o varias impedancias del puente por sensores. A continuación típicamente se coloca un amplificador.
Por último, entre el acondicionador y el siguiente paso en el proceso de la señal puede haber una cierta distancia o un alto nivel de ruido, por lo que una señal de tensión no es adecuada al verse muy afectada por estos dos factores. En este
caso se debe adecuar la señal para su transporte, por ejemplo transmitiendo la información en la frecuencia o en la corriente (por ejemplo el bucle de 4-20mA).
Para un procesado de la señal eficaz hay que convertir la señal en digital. La instrumentación también estudia la conversión analógica-digital, así como la conversión digital-analógica. Por otra parte también pueden usarse técnicas de multiplexación de señales en el caso que haya más de una para medir.

Instrumentación Virtual.
De acuerdo al sentido común, un dispositivo virtual es un objeto que posee la capacidad de producir un efecto, sin estar presente físicamente. Es por esto que la denominada Instrumentación Virtual ha revolucionado el mercado de la Instrumentación principalmente porque no es necesario disponer físicamente de los Instrumentos para realizar aplicaciones.
Desde principios de la década de los 80’s, y siguiendo la tendencia de la Tecnología y del Mercado, varias compañías comenzaron a desarrollar sistemas para implementar aplicaciones basadas en Instrumentación Virtual, esto debido principalmente a la eficiencia y beneficios de esta nueva tecnología, permitiendo de esta forma que el usuario configure y genere sus propios sistemas logrando de esta forma: alto desempeño del sistema, Flexibilidad, Reutilización y Reconfiguración. A la par con estos beneficios se logra una notoria disminución de costos de desarrollo, costos de mantenimiento, etc.
Instrumentación Virtual Contra Instrumentación Tradicional.
En la instrumentación Tradicional, el instrumento actúa totalmente aislado, con capacidades predefinidas por el fabricante, conjunto de entradas y salidas fijas, interfaz con el usuario basada en botones, perillas, led y display que permiten controlar o cambiar algunas de las características del instrumento que en el fondo es un dispositivo electrónico que contiene Amplificadores de Instrumentación, Filtros, Conversores A/D, Microprocesadores, Memorias y Buses de comunicación para poder convertir y representar una señal eléctrica en forma numérica o a través de un display o un gráfico, es por esto que el Instrumento Tradicional representa una arquitectura cerrada, impidiendo realizar algún cambio en su funcionalidad, debido a que necesariamente cualquier modificación pasa por realizar cambios en la circuitería interna del equipo, lo que evidentemente es muy poco factible.
La Instrumentación Virtual por otra parte aprovecha el bajo costo de los PC o estaciones de trabajo y su alto grado de rendimiento en procesos de análisis para implementar Hardware y Software que permiten al usuario incrementar la funcionalidad del instrumento tradicional. Sin embargo, la importancia fundamental de esta herramienta, es que permite al usuario establecer las características del instrumento y de esta forma sus potencialidades y limitaciones. Por medio de la instrumentación Virtual se pueden emular una gran cantidad de instrumentos tales como Multímetros, Osciloscopios, Analizadores de señal, agregando además características tales como: Análisis numérico, Visualización, Almacenamiento y Procesamiento de datos, entre otras.
Tal vez el principal inconveniente es la inversión inicial que involucra adquirir Software y Hardware, pero debido a que estos son completamente Reutilizables se traduce en beneficios a mediano y largo plazo.
Componentes De Un Sistema Basado En Instrumentación Virtual
Los sistemas basados en PC que permiten desarrollar aplicaciones con Instrumentación Virtual, tienen una estructura que se puede dividir en tres componentes fundamentales:
Hardware de Adquisición de Datos y Acondicionamiento de Señal Computador Personal Software.
Sin embargo, en cualquier aplicación con estos sistemas surgen otros elementos tales como:
Transductores Bloques Terminales Cables conectores
La función de cada uno de estos componentes es fundamental para el desarrollo de aplicaciones en Instrumentación Virtual, es por esto que se definirán brevemente las características de cada uno de estos elementos.
Transductores.
Son los elementos que tienen la capacidad de transformar una señal en una de naturaleza distinta. Es así como se tienen transductores que pueden censar un fenómeno físico, entregando una señal eléctrica con la información necesaria para interpretarlo y otros que pueden actuar sobre un fenómeno determinado mediante la generación de señales. Las señales provenientes de ciertos transductores son ingresadas al sistema de adquisición de datos en forma de Voltaje o Corriente, dependiendo esto último exclusivamente del Transductor y de la Tarjeta Adquisidora. Los diferentes tipos de transductores, así como sus respuestas se pueden apreciar en el apartado Instrumentación Electrónica de este trabajo.
Bloques Terminales.
Estos elementos constituyen la interfaz de conexión entre los transductores y los Sistemas de adquisición y acondicionamiento de señal. Son simplemente bloques similares a las borneras, pero presentan características adicionales que los hacen muy útiles, como por ejemplo algunos incluyen RTD conectados a un canal de adquisición dedicado para realizar la compensación de cero cuando se mide temperatura con termopares. Otros Bloques tienen conjuntos de resistencias de precisión para realizar lectura de señales de corriente.
Hardware de Acondicionamiento de Señal.
Las señales eléctricas generadas por los Transductores deben ser acondicionadas para poder ser adquiridas por el Hardware. Los accesorios de acondicionamiento permiten Amplificar, Aislar y Filtrar para realizar mediciones más exactas y además, Multiplexar y Excitar Transductores como Strain Gauges y RTD. Además permiten aumentar el número de canales para aplicaciones que así lo requieran.

Hardware de Adquisición de Datos.
Estos dispositivos son fundamentales para implementar cualquier aplicación en Instrumentación Virtual, ya que permiten relacionar en forma directa el concepto Virtual desarrollado en el computador y el concepto Instrumentación que se desarrolla en terreno, ahí donde están los Sensores y Actuadores, transformándose así en una interfaz absolutamente necesaria.
Cables de Conexión.
La necesidad de conectar equipos entre sí es evidente, más aún cuando se trata de dispositivos de naturaleza distinta, por ejemplo PC y Hardware de Adquisición. Es por esto que cada etapa de la aplicación deberá ser cableada con un tipo de cable conector apropiado y que cumpla las condiciones mínimas de compatibilidad para asegurar un correcto funcionamiento.
Los cables conectores típicos son los que presentan aislación permitiendo tener mayor inmunidad al ruido y una conexión robusta y tos cables planos que por lo general son de muy bajo costo, flexibles y menos robustos siendo de esta forma, más propensos al ruido.
Computadora.
La Computadora, ya sea PC o Portátil puede afectar drásticamente el desempeño de un sistema, principalmente porque puede potenciar o limitar las aplicaciones de Software y de Adquisición de Datos. Hoy en día la Tecnología basada en procesadores Pentium y PowerPc, y agregando el alto desempeño de la arquitectura de los buses PCI, USB, y el tradicional bus
ISA/EISA y Machintosh NuBus, entregan una herramienta poderosa, sobre todo, en velocidad.
Además con la posibilidad de utilizar PCMCIA para PC portátiles, permiten desarrollar aplicaciones que entregan una mayor flexibilidad y movilidad. El desarrollo que ha tenido la transferencia de datos DMA en algunas arquitecturas de Computador, permite incrementar la tasa de transferencia y así la velocidad del sistema. De acuerdo a la arquitectura del computador y las características del Hardware se debe escoger el sistema operativo y el Software de aplicación que entreguen mayores beneficios a la hora de establecer aplicaciones.
Software.
El Software transforma al PC, Hardware de Adquisición y Acondicionamiento de señales en un sistema completo de adquisición y generación de señales, análisis, procesamiento y visualización de datos, es decir, es el último y tal vez uno de los más importantes ingredientes para realizar una aplicación de Instrumentación Virtual. A la hora de elegir el Software adecuado se debe considerar entre otras cosas:
Compatibilidad con el Hardware de Adquisición y Acondicionamiento.

Funcionalidad expresada en Drivers para manejar un determinado Hardware.
Sistema operativo bajo el cual opera. Potencialidad y Flexibilidad. Dificultad y complejidad en la programación.
Arduino.
¿Qué es Arduino?
Figura 4. Diagrama de bloques de un sistema de instrumentación virtual.

Arduino es una herramienta para hacer que los ordenadores puedan sentir y controlar el mundo físico a través de tu ordenador personal. Es una plataforma de desarrollo de computación física (physical computing) de código abierto, basada en una placa con un sencillo microcontrolador y un entorno de desarrollo para crear software para la placa.
Se puede usar Arduino para crear objetos interactivos, leyendo datos de una gran variedad de interruptores y sensores y controlar multitud de tipos de luces, motores y otros actuadores físicos. Los proyectos de Arduino pueden ser autónomos o comunicarse con un programa que se ejecute en una computadora (ej. Flash, Processing, MaxMSP). La placa se puede montar o comprarla ya lista para usar, y el software de desarrollo es abierto y se puede descargar gratis.
El lenguaje de programación de Arduino es una implementación de Wiring, una plataforma de computación física parecida, que a su vez se basa en Processing, un entorno de programación multimedia.
¿Por qué usar arduino?
Hay muchos otros microcontroladores y plataformas con microcontroladores disponibles para la computación física. Parallax Basic Stamp, BX-24 de Netmedia, Phidgets, Handyboard del MIT, y muchos otros ofrecen funcionalidades similares. Todas estas herramientas organizan el complicado trabajo de programar un microcontrolador en paquetes fáciles de usar. Arduino, además de simplificar el proceso de trabajar con microcontroladores, ofrece algunas ventajas respecto a otros sistemas a profesores, estudiantes y amateurs:
Accesible: Las placas Arduino son más accesibles comparadas con otras plataformas de microcontroladores. La versión más cara de un modulo de Arduino puede ser montada a mano, e incluso ya montada cuesta bastante menos de 2000 pesos.
Multi-Plataforma: El software de Arduino funciona en los sistemas operativos Windows, Macintosh OSX y Linux. La mayoría de los entornos para microcontroladores están limitados a Windows.
Entorno de programación simple y directo: El entorno de programación de Arduino es fácil de usar para principiantes y lo suficientemente flexible para los usuarios avanzados. Pensando en los profesores, Arduino está basado en el entorno de programación de Procesing con lo que el estudiante que aprenda a programar en este entorno se sentirá familiarizado con el entorno de desarrollo Arduino.
Software ampliable y de código abierto: El software Arduino esta publicado bajo una licencia libre y preparado para ser ampliado por programadores experimentados. El lenguaje puede ampliarse a través de librerías de C++, y si se está interesado en profundizar en los detalles técnicos, se puede dar el salto a la programación en el lenguaje AVR C en el que está basado. De igual modo se puede añadir directamente código en AVR C en tus programas si así lo deseas.
Hardware ampliable y de Código abierto: Arduino está basado en los microcontroladores ATMEGA168, ATMEGA328 y ATMEGA1280. Los planos de los módulos están publicados bajo licencia Creative Commons, por lo que diseñadores de circuitos con experiencia pueden hacer su propia versión del módulo, ampliándolo u optimizándolo. Incluso usuarios relativamente inexpertos pueden construir la versión para placa de desarrollo para entender cómo funciona y ahorrar algo de dinero.
Arduino Uno, La tarjeta Elegida.
El Arduino uno es la tarjeta mas económica de la línea disponible en el mercado, esta incorpora 14 pines de entrada/salida digital, de las cuales 6 pueden ser utilizadas para salidas de PWM (Pulse Width Modulation), para controlar motores. Asimismo cuenta con 6 entradas analógicas, un puerto USB y un Jack para alimentación externa, con lo cual es una muy buena opción para proyectos de pequeña escala, sin descuidar el rendimiento necesario para cualquier proyecto.
Especificaciones Técnicas.
Microcontrolador ATmega328
Voltaje De Operación 5V
Voltaje de entrada recomendado 7-12V
Voltaje de entrada máximo. 6-20V
Pines I/O Digitales 14 (6 Salida PWM)
Pines entrada Análogos 6
Amperaje por pin I/O 40 mA
Amperaje Para Pin de 3.3V 50 mA
Memoria Flash 32 KB (ATmega328), 0.5 usados por Bootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Velocidad de Reloj. 16 MHz
Figura 5. Vista Frontal y Trasera de la tarjeta Arduino Uno.
Figura 6. Diagrama Esquemático De Conexiones de la Arduino UNO.

Matlab.
MATLAB (abreviatura de MATrix LABoratory, "laboratorio de matrices") es un software matemático que ofrece un entorno de desarrollo integrado(IDE) con un lenguaje de programación propio (lenguaje M). Está disponible para las plataformas Unix, Windows y Mac OS X.
Entre sus prestaciones básicas se hallan: la manipulación de matrices, la representación de datos y funciones, la implementación de algoritmos, la creación de interfaces de usuario (GUI) y la comunicación con programas en otros lenguajes y con otros dispositivos hardware. El paquete MATLAB dispone de dos herramientas adicionales que expanden sus prestaciones, a saber, Simulink (plataforma de simulación multidominio) y GUIDE (editor de interfaces de usuario - GUI). Además, se pueden ampliar las capacidades de MATLAB con las cajas de herramientas (toolboxes); y las de Simulink con los paquetes de bloques (blocksets).
Es un software muy usado en universidades y centros de investigación y desarrollo. En los últimos años ha aumentado el número de prestaciones, como la de programar directamente procesadores digitales de señal o crear código VHDL.
Breve Historia Del Desarrollo De Matlab.
Matlab fue creado por Cleve Moler en 1984, surgiendo la primera versión con la idea de emplear paquetes de subrutinas escritas en Fortran en los cursos de álgebra lineal y análisis numérico, sin necesidad de escribir programas en dicho lenguaje. El lenguaje de programación M fue creado en 1970para proporcionar un sencillo acceso al software de matrices LINPACK y EISPACK sin tener que usar Fortran.
Características Principales.
Lenguaje de alto nivel para el cálculo numérico, la visualización y el desarrollo de aplicaciones.
Entorno interactivo para la iterativa exploración, el diseño y la solución de problemas.
Funciones matemáticas para álgebra lineal, estadística, análisis de Fourier, filtrado, optimización, integración numérica y resolución de ecuaciones diferenciales ordinarias.
Gráficos integrados para visualizar datos y herramientas para crear gráficos personalizados.
Herramientas de desarrollo para mejorar la calidad y el mantenimiento del código, así como para maximizar el rendimiento.
Herramientas para crear aplicaciones con interfaces gráficas personalizadas.
Funciones para integrar algoritmos basados en MATLAB con aplicaciones y lenguajes externos tales como C, Java, .NET y Microsoft® Excel®.
Utilidades de Matlab.
Calculo Numérico.
MATLAB proporciona una serie de métodos de cálculo numérico para analizar datos, desarrollar algoritmos y crear modelos. El lenguaje de MATLAB incluye funciones matemáticas que permiten las operaciones científicas y de ingeniería habituales. Las funciones matemáticas principales utilizan librerías optimizadas por procesador a fin de permitir una ejecución rápida de los cálculos de vectores y matrices.Entre los métodos disponibles se encuentran:
Interpolación y regresión
Diferenciación e integración
Sistemas lineales de ecuaciones
Análisis de Fourier
Valores propios y valores singulares
Figura 7 Análisis de datos mediante MATLAB

Ecuaciones diferenciales ordinarias (EDO)
Matrices dispersas
Los productos complementarios de MATLAB proporcionan funciones para áreas especializadas tales como estadística, optimización, análisis de señales y aprendizaje automático.
Análisis, Visualización y Adquisición De Datos.
MATLAB ofrece herramientas para adquirir, analizar y visualizar datos, lo que permite profundizar en los datos en una fracción del tiempo que se tardaría con el uso de hojas de cálculo o lenguajes de programación tradicionales. También es posible documentar y compartir los resultados mediante gráficos e informes, o bien a través de la publicación de código de MATLAB.
Adquisición de datos
MATLAB permite acceder a datos de archivos, otras aplicaciones, bases de datos y dispositivos externos. Es posible leer datos con formatos populares como el de Microsoft Excel, archivos de texto o binarios, archivos de imagen, sonido y vídeo o archivos científicos tales como netCDF y HDF. Las funciones de E/S de archivos permiten trabajar con archivos de datos de cualquier formato.
Gracias al uso de MATLAB con productos complementarios, podrá adquirir datos desde dispositivos de hardware, como el puerto serie o la tarjeta de sonido del ordenador, o bien recurrir al streaming de los datos dinámicos medidos directamente a MATLAB para su análisis y visualización. También es posible comunicarse con instrumentos tales como osciloscopios, generadores de funciones y analizadores de señales.
Análisis de datos
MATLAB permite gestionar, filtrar y pre procesar los datos. Es posible realizar análisis de datos exploratorios a fin de descubrir tendencias, probar suposiciones y elaborar modelos descriptivos. MATLAB proporciona funciones para filtrado y suavizado, interpolación, convolución y transformadas rápidas de Fourier (FFT). Los productos complementarios proporcionan capacidades para ajuste de curvas o de superficies, estadística multivariante, análisis espectral, análisis de imágenes, identificación de sistemas y otras tareas de análisis.
Visualización de datos
MATLAB proporciona funciones integradas para la creación de gráficos en 2-D y 3-D, así como funciones de visualización de volumen. Estas funciones permiten visualizar y comprender los datos, además de comunicar los resultados. Los gráficos se pueden personalizar de forma interactiva o mediante programación.
Herramientas de desarrollo
MATLAB incluye una serie de herramientas para desarrollar algoritmos de forma eficiente, entre las que se cuentan:
Ventana de comandos: permite introducir datos, ejecutar comandos o programas y mostrar los resultados de forma interactiva.
MATLAB Editor: ofrece características de edición y depuración, tales como establecer puntos de interrupción y avanzar paso a paso por líneas de código individuales.
Analizador de código: comprueba el código automáticamente en busca de problemas y recomienda modificaciones para maximizar el rendimiento y el mantenimiento.
MATLAB Profiler: mide el rendimiento de los programas de MATLAB e identifica áreas de código que se pueden modificar para mejorarlas.Otras herramientas adicionales comparan código y archivos de datos, además de proporcionar informes que muestran las dependencias de archivo, los recordatorios anotados y la cobertura del código.
Integración con otros lenguajes y aplicaciones
Las aplicaciones de MATLAB se pueden integrar con aplicaciones escritas en otros lenguajes. Desde MATLAB, es posible invocar directamente código escrito en C, C++, Java y .NET. Mediante el motor de librerías de MATLAB, se puede invocar código de MATLAB desde aplicaciones escritas en C, C++ o Fortran.
Rendimiento
MATLAB emplea librerías optimizadas por procesador para la rápida ejecución de cálculos de matrices y vectores. En el caso de los cálculos escalares multipropósito, MATLAB utiliza tecnología de compilación JIT (just-in-time) para proporcionar velocidades de ejecución que rivalizan con las de los lenguajes de programación tradicionales.
A fin de sacar partido de los ordenadores multinúcleo y multiprocesador, MATLAB ofrece gran cantidad de funciones multithread, tanto numéricas como de álgebra lineal. Estas funciones se ejecutan automáticamente en varios threads computacionales en una única sesión de MATLAB, lo que permite una ejecución más rápida en ordenadores multinúcleo.
Se puede sacar aún más partido de los equipos multinúcleo y otros recursos de computación de alto rendimiento tales como GPUs y clusters con productos complementarios de cálculo paralelo. Estos productos proporcionan constructos de alto nivel que permiten ejecutar las aplicaciones en paralelo con cambios menores en el código de MATLAB.

Desarrollo y distribución de aplicaciones
Las herramientas y los productos complementarios de MATLAB proporcionan una serie de opciones para desarrollar y distribuir aplicaciones. Es posible compartir algoritmos y aplicaciones individuales con otros usuarios de MATLAB o distribuirlos libremente entre otras personas que no disponen de MATLAB.
Diseño de interfaces gráficas de usuario
Mediante GUIDE (entorno de desarrollo de interfaces gráficas de usuario), es posible crear, diseñar y editar interfaces gráficas de usuario. Se pueden incluir controles habituales como cuadros de lista, menús desplegables y botones, además de gráficos de MATLAB. También es posible crear interfaces gráficas de usuario mediante programación utilizando las funciones de MATLAB.
Distribución de aplicaciones
Para distribuir una aplicación directamente entre otros usuarios de MATLAB, se puede empaquetar a modo de aplicación, lo cual genera un archivo único para la distribución. Las aplicaciones se instalan automáticamente en la galería de aplicaciones de MATLAB para que resulte fácil acceder a ellas.Si desea compartir aplicaciones con personas que no disponen de MATLAB, puede utilizar productos de distribución de aplicaciones. Estos productos complementarios generan de forma automática aplicaciones autónomas, librerías compartidas y componentes de software para su integración en entornos de C, C++, Java, .NET y Excel. Los ejecutables y los componentes se pueden distribuir de forma gratuita.MATLAB Production Server permite ejecutar programas de MATLAB empaquetados con MATLAB Compiler dentro de sus sistemas de producción, lo cual hace posible la incorporación de análisis numéricos en aplicaciones web, de bases de datos y de empresa.Generación de código C
MATLAB Coder se puede emplear para generar código C independiente a partir del código de MATLAB. MATLAB Coder admite un subconjunto del lenguaje de MATLAB que suelen emplear los ingenieros de diseño para desarrollar algoritmos a modo de componentes de sistemas más amplios. Este código se puede utilizar para la ejecución autónoma, para la integración con otras aplicaciones de software o como parte de una aplicación embebida.

Metodología.
Tomando como base los conocimientos de comportamiento de elementos de variación analógico con una entrada mecánica, como lo es en este caso un joystick, que es meramente un potenciómetro bidimensional.Se decidió diseñar un sensor en base a este, para así poder realizar una cuantificación de fuerzas ejercidas en la probeta de prueba, debido al flujo constante de aire. El valor analógico entregado por la variación de posición del par de potenciómetros, es llevado a la interfaz de la DAQ usada, en este caso el arduino, y es convertido a una señal digital la cual puede ser leída por el software diseñado en MATLAB para realizar la adquisición de datos, para posteriormente mostrarlos en tiempo real en un display grafico dentro del GUI de MATLAB. De igual manera se implemento un anemómetro, basado en un ventilador de computadora implementado de manera inversa, estableciendo relación voltaje-velocidad del viento.
Diseño Del Transductor.
Se diseño el transductor, de acuerdo a la magnitud que se debía medir, en este caso un desplazamiento provocado por la aplicación de una fuerza, para esto se decidió utilizar un joystick, es decir un dispositivo con dos resistencias variables una localizada en el eje x y otro en el eje y, el cual nos brinda una señal análoga de voltaje en cada uno de los ejes, el diagrama esquemático de conexiones es el siguiente:
Donde el accionamiento mecánico del joystick es el responsable de la variación de voltaje en cada uno de los potenciómetros. La salida variable de estos, pasan directo a la etapa de adquisición de datos, la cual analizaremos más adelante.
Figura 8. Diagrama Esquemático Transductor.
Diseño Del Anemómetro.
Se propuso el uso de un ventilador de enfriamiento de una computadora, ya que este al usarse como generador nos brinda un voltaje dependiendo de la velocidad de giro del eje, debido a que el voltaje que nos entrega el ventilador es de carácter alterno, ya que varia con respecto al tiempo, tuvimos que rectificarlo con un puente de diodos, antes de la etapa de adquisición de datos, el diagrama esquemático es el siguiente:
Cabe señalar que los buses, son las salidas del puente rectificador hacia la tarjeta de adquisición de datos, (Arduino), lo cual trataremos más adelante.
Diseño del GUI.
Para poder diseñar una interfaz amigable para el usuario, se utilizo la utilidad de diseño GUIDE incluida en la interfaz de MATLAB.
Para el diseño total de la interfaz utilizada, insertamos 1 componente axes, 5 Static Text y 3 Edit Text. Editando cada uno de los componentes nos quedara la ventana como la vemos a continuación:
Figura 9. Diagrama esquemático
Anemómetro.

Guardamos el archivo con extensión .fig y nos generara un archivo con
extensión .m que contiene toda la rutina de inicialización de la interfaz, debido a
que esta es generada automáticamente por Matlab, no entraremos en detalle.
Una vez que tenemos la ventana diseñada, pasamos a la edición del código para
la adquisición de datos, para esto añadiremos algunas líneas al código generado,
después de la línea 59, cuyo comentario dice que es la actualización de la
estructura de la interfaz, añadiremos las siguientes líneas:
En estas líneas limpiamos todas las variables y figuras que pudiesen estar
almacenadas en la memoria, con los comandos clc y clear all, establecemos como
variables globales rs y a, esta ultima la asignamos a la tarjeta Arduino
Figura 10. Interfaz Diseñada en GUIDE
clcclear allglobal a rs;a=arduino('com30');rs=0;

especificando el puerto en el cual está conectado, cabe aclarar que este puerto
depende de cada una de las computadoras.
Continuando con el desarrollo de la interfaz, pasamos a la graficacion de los datos
obtenidos mediante el Arduino, para esto utilizaremos el objeto axes que
habíamos insertado en el GUI de manera anterior, para esto haremos toda la
adquisición y graficacion, añadiendo las siguientes líneas de código en la siguiente
sección inmediata del código generado por Matlab.
Añadiremos las siguientes líneas de código inmediatamente después de la línea
77 del código, y debe de quedar como vemos a continuación:
% Get default command line output from handles structureglobal a rsrs1=a.analogRead(1);rs2=a.analogRead(2);for i=1:100000 for j=1:5 if rs==50 rs=0 endrs=rs+1 val1=a.analogRead(1);val2=a.analogRead(2);pause(.1)velo(1,j)=a.analogRead(3);vz=mean(velo)t(1,rs)=rs;res1(1,rs)=(val1-rs1)*.1;res2(1,rs)=(val2-rs2)*.1;set(handles.Fy,'String',fix((val2-rs2)*.1));set(handles.fx,'String',fix((val1-rs1)*.1));set(handles.vel,'String',fix((vz)*.1));plot (t,res1,'r',t,res2,'b')title ('\bfFuerzas de Reaccion');xlabel ('\bfTiempo (ds)');ylabel ('\bfFuerza(Nick)');grid onendend
Declaramos de nueva cuenta las 2 variables globales a y rs, para posteriormente
seleccionar 2 de las entradas analógicas de la tarjeta Arduino como pines de
adquisición de datos de fuerzas, y un tercer pin como adquisición de velocidad del
anemómetro, después declaramos 2 ciclos para que nos muestre continuamente
los resultados obtenidos para así se obtener una grafica continua en tiempo real
de los datos obtenidos, posteriormente para mostrar un valor numérico en los
objetos Edit Text usaremos el comando set(handles.var1.’string’.fix(var)) donde
var1 es la etiqueta de manejo del objeto y var es el valor numérico que se tendrá
que mostrar. Para realizar la graficacion se utiliza el comando plot, agregando un
titulo a la grafica así como etiquetas a ambos ejes de la misma. Al terminar de
agregar estas líneas al código generado, ya se puede dar inicio a la prueba con la
tarjeta Arduino, obteniendo lo siguiente:
Figura 11. GUI Terminado.
Resultados.
Al término de la investigación y desarrollo se obtuvieron un gran número de datos,
los cuales, considerando que no se realizo un proceso de calibración, son
adimencionales, ya que no se compararon las medidas obtenidas por el sistema
con alguna medida real. En el caso especifico del presente proyecto, no contamos
con un anemómetro, para poder calibrar de manera integra el túnel de viento.
En el aspecto de instrumentación virtual, pudimos proponer un sistema de
mediciones de fuerzas de manera exitosa, al conjuntar el lenguaje de alto nivel,
como lo es el Matlab, con la facilidad de control del hardware libre, como lo es el
Arduino. Este sistema tiene bastante futuro, ya que históricamente no se cuenta
con un sistema similar al propuesto por el presente. Cabe aclarar que la eficiencia
de trabajo del sistema, depende mucho de la velocidad del procesador del
computador servidor, ya que al ser instrumentación virtual, depende
principalmente de este factor.
El diseño de la interfaz grafica, fue muy bueno, ya que es amigable con el usuario,
muestra de manera dinámica y apta los resultaos y es fácil de leer. En la figura 11
podemos observar el funcionamiento del sistema propuesto, mostrando las
fuerzas en ambos ejes, la velocidad del viento y la grafica de comportamiento del
sistema
Figura 11. Funcionamiento Del GUI

Bibliografía.
[1]Arduino-Home Page www.arduino.cc
[2] Matlab-www.mathworks.com/products/matlab/
[3] Túnel de viento IMFIA http://www.fing.edu.uy/imfia/eolodinamica/tunel.html
[4] Instrumentación Industrial- Creus Solé Antonio.
[5] Aprenda Matlab 7.0 Como si estuviera en primero- Javier García de Jalón, José
Ignacio Rodríguez, Jesús Vidal.


















