
Rendering: Shading and Lighting. In the last lecture we saw how to model objects and represent them...
77
Rendering: Shading and Lighting
-
Upload
christal-cox -
Category
Documents
-
view
214 -
download
0
Transcript of Rendering: Shading and Lighting. In the last lecture we saw how to model objects and represent them...

Rendering: Shadingand Lighting

In the last lecture we saw how to model objects and represent them as wireframe models. Wire frame models depict the outer hull of the object but do not convey a realistic image of the model.
The next step in our quest for visual realism is to paint our models so we can render realistic images. This process is called rendering.

In this lecture you will learn all about the components of rendering:
Hidden surface removal The CG reflectance model Surface materials (including texture
mapping) Lights Shading algorithms

Rendering 3D images is a multi-step process. First, we need to identify which component surfaces (usually polygons) of the model are viewable from the current viewpoint.
This process involves back-face culling as well as identifying surfaces obstructed by surfaces in front of them.
Once visible surfaces have been identified, we can simply assign a color to them and paint them.

In most cases, however, we do not want surfaces to be colored with just one color. Surfaces should appear shaded based on the amount of light that they receive, as is the case in real life.
Figure. A sphere rendered with:a) a single color,b) each polygon rendered with a single color, c) shaded smoothly

To be able to simulate this effect, we need to define material properties of the surface: not only its color but also how it responds to light. This process is called shading.
We need to define light sources to light up the scene, which enable us to view it-a process called lighting.
Once the shading and lighting of a scene has been established, shading algorithms are then used to finally render the images.

Rendering is a complex process and can be very time consuming.
For example, a typical image in the film Toy Story took anywhere between an hour and 72 hours to render on a workstation! Different shading algorithms use different methods and tricks to simulate the behavior of light and surfaces.

Obviously, which algorithm you use is based on your precise needs. An interactive game needs shaders whose output may not be very sophisticated but can be rendered quickly, whereas a blockbuster movie production can afford to use complex shaders that can take days to render images but produces spectacular results.
We shall employ some simple shading algorithms in this book and shall introduce you to some more complex ones.

We learned how to eliminate the back-facing polygonal surfaces of our model using a technique called back-face culling.
A sphere obstructing a cone: back-face culling is on
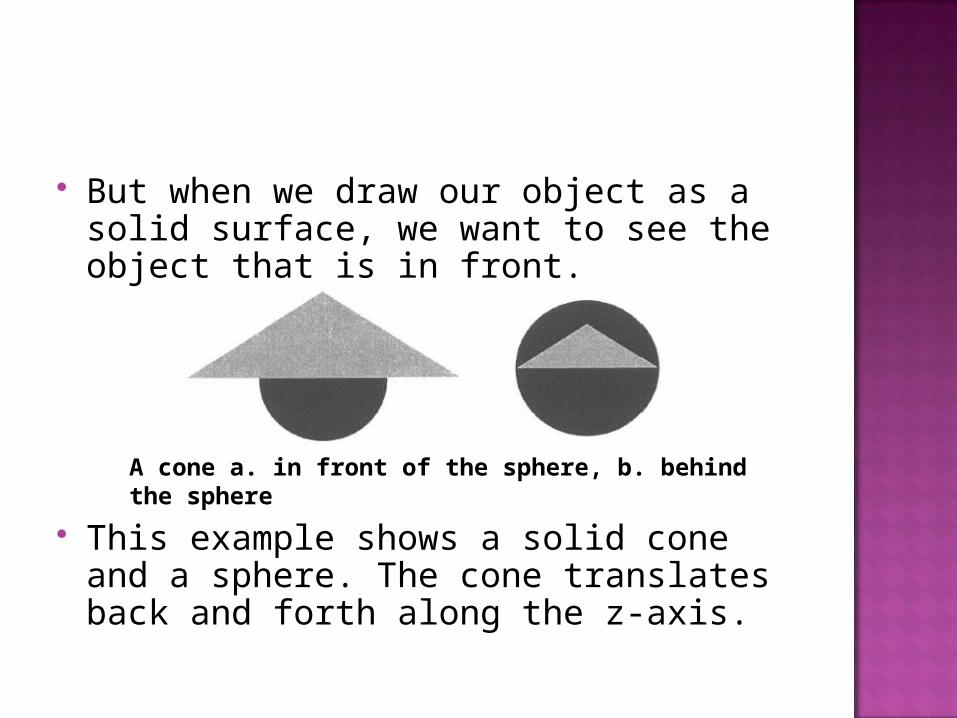
But when we draw our object as a solid surface, we want to see the object that is in front.
This example shows a solid cone and a sphere. The cone translates back and forth along the z-axis.
A cone a. in front of the sphere, b. behind the sphere

Even when the cone is behind the sphere, we still see it being drawn in front! We want not only the back surfaces of the sphere and cone to be hidden from view, but also the portion of the cone being obstructed from view by the sphere.
The process to remove these surfaces is called hidden surface removal.
Back-face culling is part of this removal process.
One of the simplest techniques to accomplish hidden surface removal is known as z-buffering or depth buffering.
In this process, a buffer in memory called the z-buffer is used to keep track of the surface that is closest to the eye for any given pixel.
The closest object finally gets drawn onto the screen.

Note that for solid closed objects, this process will automatically remove back-facing surfaces also.
OpenGL provides z-buffering by way of a depth buffer. To use it, you need to first enable depth buffering.
You can do this by initializing the display mode to use the depth buffer

and then enabling the depth-buffering test
Before drawing the scene, you need to clear the depth buffer and then draw the objects in the scene.
Open GL will perform all the calculations to store the closest surface information in its depth buffer and draw the scene accordingly.

Imagine entering a dark room with no lights in it. If the dark room is perfectly insulated from any kind of light, you will not be able to see anything in the room even though there are objects in it.
Imagine now that we switch on a bulb in the room. Immediately, we shall start seeing the objects in the room.
How brightly we see them will depend on the wattage and color of the bulb as well as on the material that the objects are made of.

We are able to see because light bounces off (reflects) from objects and eventually reaches our eyes.
Light rays entering the eye enable sight

Once light reaches our eyes, signals are sent to our brain, and our brain deciphers the information in order to detect the appearance and location of the objects we are seeing.
The light sources directly or indirectly define the incident light rays.
The surface properties of the objects in the room, also called the surface material, determine how the incoming light is reflected.
Let us explore the way light is reflected in further detail.
Light is usually modeled as light rays (which can be thought of as vectors!).
Many rays traveling together are referred to as a beam of light. Light rays behave in a very predictable manner. If a ray of light could be observed approaching and reflecting off a flat mirror, then the behavior of the light as it reflects would follow the law of reflection

As shown in figure, a ray of light, I, approaches the mirror and is called the incident ray.
Law of reflection

The ray of light, R, that leaves the mirror, is known as the reflected ray.
At the point of incidence where the ray strikes the mirror, we can define a normal, N, to the surface of the mirror.
The normal is perpendicular to the surface at the point of incidence and divides the angle between the incident ray and the reflected ray into two equal angles. The angle between the incident ray and the normal is known as the angle of incidence.

The law of reflection states that when a ray of light reflects off a surface, the angle of incidence is equal to the angle of reflection.
Whether the surface being observed is microscopically rough or smooth has a tremendous impact upon the subsequent reflection of a beam of light.

Reflection off smooth and rough surfaces

In CG we try to emulate the above-defined reflectance model to approximate the way lights and surface materials. Mathematical equations that approximate this behavior govern the final color of each pixel in the image.
The most popular CG reflectance model is the one proposed by Phong.

The Phong reflectance model is also the model employed by OpenGL.
In this reflectance model, we break reflectance into four components:
1.Ambient Reflectance: This is a hack introduced in CG. It is used
to avoid CG scenes from going completely black. Ambient light has no direction; it impinges equally on all surfaces from all directions and is reflected by a constant multiple, resulting in flat-looking surfaces.

2. Diffuse Reflectance: Surfaces with diffuse reflectance
scatter light equally in all directions, but the intensity of the reflection varies based on the angle of incidence.
3. Specular Reflectance: Specular reflections can be observed on
any shiny surface, causing a dull grey or white highlight on the surface.

4. Emission: The emission component of a surface is
again a hack. It is used to simulate luminous objects that seem to glow from their own light, such as a light bulb.
Within our CG scene, we define surface materials with reflection coefficients for each of the four components.
The reflection coefficients are defined as RGB triplets, and have a value between 0 and 1 - 1 being maximum reflection.

Many people refer to these reflectance coefficients as the color of the material, since it will be the color of the light it will reflect.
This material is then assigned to models in the scene.

Four components of Phong reflectance model

CG lights are defined to illuminate the scene. These lights are again modeled with RGB colors for the ambient, diffuse, and specular components. The red, green and blue components have a value between 0 and 1.
Some software packages further define an intensity to the light: the intensity is simply a scale factor for the color of the light: the actual color of the light is the product of its color and its intensity.

When incoming light strikes an object, each of these four components is calculated to determine its individual contribution to the reflected light.
All four components then added together to attain the final color of the outgoing light
Let us look into each of these components and how they are calculated.

Ambient reflectance is actually just an approximation to the fact that there is never a perfect dark room in this world. Some amount of light always seeps in, enabling vision.
This kind of illumination enables us to see faint traces of objects with flat shades of surface colors and is referred to as ambient lighting.

When light with an ambient component (ambient light) strikes a surface with ambient reflectance, it is scattered equally in all directions with a constant multiple, causing the surface to look flat as shown in figure.
Ambient Reflectance

Mathematically, if the incident light has a an ambient color of (Ri, Gi, Bi) and the object it hits has a material with ambient reflectance of (Ra, Ga, Ba) then the reflected light due to ambient reflection will have a color defined as:
(Rra, Gra, Bra) = (Ri*Ra, Gi*Ga, Bi*Ba).

Surfaces with diffuse reflectance scatter light equally in all directions. The amount of light reflected is directly proportional to the angle of incidence of the incoming beam of light.
Diffuse reflectance can be observed on dull objects such as cloth or paper.

Diffuse reflectance

The exact math to calculate diffuse reflection was proposed by Lambert and
so this reflectance is often referred to as Lambert reflectance.
If we assume the light to have a diffuse color of (Rid, Gid, Bid) and the surface to have a diffuse reflection coefficient of (Rd, Gd, Bd). then the diffuse color component of the reflected light can be calculated as
where θ is the angle between the incident ray (direction of light source) and the normal to the surface at the point of incidence.
So if θ is 0 (the light hits the surface straight on) then the diffuse reflection is the brightest, but light incident on the surface at more than 90 degrees (cos(>90) <= 0) causes no light to be reflected, and the corresponding area appears black.

The diffuse color component of a light essentially models the color of the light as we perceive it.
θ used in the diffuse reflection calculation

Spherical surface with diffuse reflectance

Specular reflection produces shiny highlights often seen on shiny objects like glass or metal.
Specular reflection, unlike ambient and diffuse reflection depends on both the direction of the incident light as well as the direction that the surface is being viewed from.
The reflection is brightest when the viewing direction is parallel to the reflected light.

The equations to define specular reflectance have been proposed by many mathematicians. Each formula simulates the specular reflectance slightly differently.
However, in general, specular reflection depends on three components:
1.surface orientation, N2.direction of light source, I3. viewing direction, V

Assuming a function specular that depends on the above three factors, the specular reflection color can be defined as:
Specular reflectance

Phong proposed that this function can be approximated to be where is as shown in last figure, and n is the specular exponent that determines the size of the highlight.
Other equations have been proposed by Blinn and others to model specular reflections as well. Each equation output shiny highlights, but the softness of the highlight differs.
n)cos(

Specular reflection

Snowy with diffuse and specular reflection

The emissive color of a surface adds intensity to the object, but is unaffected by any light sources.
Since most real-world objects (except lights) don't emit light, you'll probably use this feature mostly to simulate lamps and other light sources in a scene.
Emissive component of reflectance
Flat Shading Model: In this technique, each surface is
assumed to have one normal vector (usually the average of its vertex normals) as shown in Figure.
This normal vector is used in the lighting calculations, and the resultant color is assigned to the entire surface.

Notice how flat shading causes a sudden transition in color from polygon to polygon. This is because every polygon is rendered using a normal vector that changes abruptly across neighboring polygons.
Flat shading is fast to render, and is used to preview rendering effects or on objects that are very small.

Flat shading: one normal per polygon

Gourad shading is used when smooth shading effects are needed. In this process, each vertex defines a normal vector. This normal value is used to calculate the color at every vertex of the surface.
The resulting colors are averaged into the interior of the surface to achieve a smooth render. Since polygons share vertices (and hence the same normal value), the polygon edges blend together to produce a smooth look.
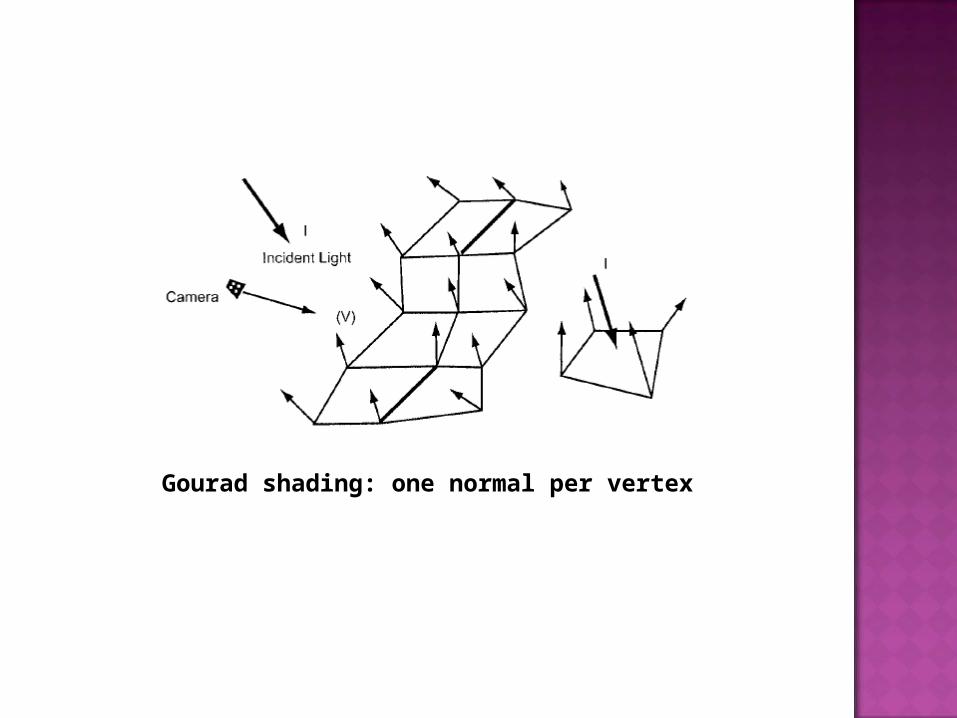
Gourad shading: one normal per vertex

Gourad shading produces smooth renders but takes longer to complete than flat shading.
Even more complicated rendering techniques exist, such as ray tracing, radiosity and volume rendering.

Texture mapping can dramatically alter the surface characteristics of an object.
It adds vitality to models and can provide great visual cues for even simple models. For example, if we map a wood grain image to a model of a chair, the chair will look like it is made out of fine wood grain.
Texture mapping an image of a brick wall onto a single polygon would give the impression that the polygon had been modeled with many individual bricks, as shown in Figure.

Texture mapping is a crucial element in today's games and graphic-oriented programs.
Without texture mapping, the models that are rendered would be far from aesthetically pleasing.
Texture mapping a polygon

Because texture mapping is so useful, it is being provided as a standard rendering technique both in graphics software interfaces and in computer graphics hardware.

When mapping an image onto an object, the color of the object at each pixel is modified by a corresponding color from the image.
The image is called a texture map and its individual elements (pixels) are called texels.
The texture map resides in its own texture coordinate space, often referred to as (s,t) space.
Typically (s, t) range from 0 to 1, defining the lower and upper bounds of the image rectangle.

The simplest version of texture mapping can be accomplished as described.
The corner points of the surface element (in world coordinates) is mapped onto the texture coordinate space using a predetermined mapping scheme.
The four points in the (s,t) space defines a quadrilateral.
The color value for the surface element is calculated by the weighted average of the texels that lie within the quadrilateral.
For polygonal surfaces, texture coordinates are calculated at the vertices of the defining polygons.
The texture coordinate values within the polygon are linearly averaged across the vertices.

Texture mapping: from texels to pixels

The texture space is defined to be from 0 to 1.
For texture coordinates outside the range [0,1] you can have the texture data either clamp or repeat over (s,t) as shown in Figure.

A texture image, repeated along t and clamped along s

After being mapped to a polygon or surface and transformed into screen coordinates, the individual texels of a texture rarely correspond to individual pixels of the final screen image.
Depending on the transformations used and the texture mapping applied, a single pixel on the screen can correspond to anything from a tiny portion of a texel (magnification) to a large collection of texels (minification), as shown in Figure.

Filtering operations are used to determine which texel values should be used and how they should be averaged or interpolated.
Magnification and Minification of texels
There are a number of generalizations to this basic texture-mapping scheme.
The texture image to be mapped need not be two-dimensional:
the sampling and filtering techniques may also be applied for both one- and three-dimensional images.

In fact 1D texture mapping is a specialized version of 2D mapping. The texture may not be stored as an array but may be procedurally generated.
Finally, the texture may not represent color at all but may instead describe transparency or other surface properties to be used in lighting or shading calculations.
The question in (2D) texture mapping is how to map the two dimensional texture image onto an object.
In other words, for each polygonal vertex (or some other surface facet) in an object, we encounter the question, "Where do I have to look in the texture map to find its color?"

Typically, basic shapes are used to define the mapping from world space to texture space. Depending on the mapping situation, we project the object‘s coordinates onto the geometry of a basic shape such as a plane, a cube, or a sphere.
It's useful to transform the bounding geometry so that it's coordinates range from zero to one and use this value as the (s,t) coordinates into the texture coordinate space.

Planar Texture mapping: mapping an image to a vase.

For example, for a map shape that is planar, we take the (x,y,z) value from the object and throw away (project) one of the components, which leaves us with its two-dimensional (planar) coordinates.
We normalize the coordinates by the maximum extents of the object to attain coordinate values between 0 and 1. This value is then used as the (s,t) value into the texture map. The last figure shows such a mapping.
If you look around your room you may realize that many objects reflect their surroundings. A bottle of water, a mobile phone, a CD cover, a picture frame, etc. are only a few examples of reflecting objects that could be found in any 3D scene.
To make the 3D world more realistic, objects should show reflections of their environment. This reflection is often achieved by a texture-mapping method called environment mapping.
The goal of environment mapping is to render an object as if it were reflective, so that the colors on its surface are those reflected from its surroundings.
In other words, if you were to look at a perfectly polished, perfectly reflective silver object in a room, you would see the walls, floor, and other objects in the room reflected off the object.

(A classic example of using environment mapping is the evil, morphing Cyborg in the film Terminator 2.) The objects whose reflections you see depend on the position of your eye and on the position and surface angles of the silver object.
Of course, objects are not usually completely reflective, so the color of the reflection is modulated with the object's actual color for a realistic look.

Ray tracing is a very expensive option and is usually not necessary for most cases. More often, certain tricks are used to achieve reflective effects.
A method often employed is called cube environment mapping. The idea behind cube environment mapping is very simple.

From an object with a reflective surface you first generate six images of the environment in each direction (front, back, up, down, left, right).
That is, imagine placing a camera at the center of the object and taking the size photographs of the world around it in the directions specified.
Based on the normal vector of the vertex in consideration, the appropriate image is selected.

This image is then projected using planar mapping onto the object as shown in Figure.
Cube Mapping

The resultant object looks like it is reflecting its environment! Mathematically, the cube face is identified by using the normal vectors (nx, ny, nz) on the surface of the object.
The greatest component is used to identify where the surface should be "looking"; and hence the cube face and the texture image to be used.
The other two coordinates are used to select the texel from the texture by a simple 3D to 2D projection.

If, say, ny was the highest value component then we divide the other components by ny (nx/ny,nz/ny).
These coordinates are normalized to give the (s,t) values into the texture map.


















