RENATO LEONI - UniFI - DiSIA - Sito...
37
RENATO LEONI Analisi semplice delle corrispondenze (Parte prima) UNIVERSITÀ DI FIRENZE DIPARTIMENTO DI STATISTICA "G. PARENTI" FIRENZE, 2007
-
Upload
truongdang -
Category
Documents
-
view
221 -
download
0
Transcript of RENATO LEONI - UniFI - DiSIA - Sito...

RENATO LEONI
Analisi semplice dellecorrispondenze( P a r t e p r i m a )
UNIVERSITÀ DI FIRENZE
DIPARTIMENTO DI STATISTICA "G. PARENTI"
FIRENZE, 2007

Questo lavoro è destinato a un uso personale e ne è vietata la
commercializzazione.
ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 3
1 PREMESSA
Essenzialmente, l'analisi semplice delle corrispondenze (ASC) ha
come obiettivo lo studio della struttura di una distribuzione doppia di
frequenze.
Della ASC esistono varie versioni. Una di queste, probabilmente la più
diffusa, è esposta in questo lavoro (1).
(1) Esempi numerici, basati sia su dati fittizi sia su dati reali, sono forniti a parte. Le nozioni dialgebra lineare, necessarie per una piena comprensione degli argomenti qui esposti, sono presentatein [14].

4 RENATO LEONI
2 I DATI DI BASE E LA LORO STRUTTURA ALGEBRICA
2.1 I DATI DI BASE
2.1.1 DISTRIBUZIONI DI FREQUENZE ASSOLUTE
Si consideri una distribuzione di frequenze assolute riferita a due carat-
teri qualitativi sconnessi A e B le cui modalità sono date, rispettivamente,
da a 1 , ... , a p e b1 , ... , bq .
La distribuzione in questione si può rappresentare nei termini del pro-
spetto seguente (tavola di contingenza)
Modalità Modalità di B Totale
di A b1 bq
a 1 n1 1 n1 q n1+
a p np 1 np q np+
Totale n+1 n+q n
in cui (i = 1, ... , p ; j = 1, ... , q)
• ni j indica la frequenza assoluta delle unità che presentano congiuntamen-
te la modalità a i di A e la modalità bj di B;
• ni+ = Σ jq n i j e n+j = Σ i
p n i j indicano le frequenze assolute marginali (2) ;
• n = Σ ip Σ j
q n i j = Σ ip n i+ = Σ j
q n +j indica la numerosità complessiva della
collettività esaminata.
La distribuzione di frequenze assolute in questione dà luogo alle p distri-
buzioni di frequenze assolute di B condizionate alle modalità di A, ciascuna
delle quali è rappresentata da
(2) Conveniamo che tali frequenze marginali siano positive.
ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 5
Modalitàdi B b1 bq Totale
Frequenzeassolute
condizionateni 1 ni q ni+
e alla distribuzione di frequenze assolute marginali di B, rappresentata da
Modalitàdi B b1 bq Totale
Frequenzeassolutemarginali
n+1 n+q n
La distribuzione di frequenze assolute di cui sopra dà luogo poi alle q
distribuzioni di frequenze assolute di A condizionate alle modalità di B, cia-
scuna delle quali è rappresentata da
Modalitàdi A a 1 a p Totale
Frequenzeassolute
condizionaten1 j np j n+j
e alla distribuzione di frequenze assolute marginali di A, rappresentata da
Modalitàdi A a 1 a p Totale
Frequenzeassolutemarginali
n1+ np+ n
2.1.2 DISTRIBUZIONI DI FREQUENZE RELATIVE
(i) Si considerino le p distribuzioni di frequenze relative di B condizionate
alle modalità di A, ciascuna delle quali è rappresentata da
6 RENATO LEONI
Modalitàdi B b1 bq Totale
Frequenzerelative
condizionate
ni 1
ni +
ni q
ni +
1
e la distribuzione di frequenze relative marginali di B, rappresentata da
Modalitàdi B b1 bq Totale
Frequenzerelative
marginali
n+1
n
n+q
n1
Riassuntivamente, tali distribuzioni di frequenze relative si possono rap-
presentare mediante il prospetto seguente
Modalità Modalità di B Totale
di A b1 bq
a 1n1 1
n1 +
n1 q
n1 +
1
a pnp 1
np +
np q
np +
1
n+1
n
n+q
n1
Ciò premesso, si consideri la matrice
X (1) =
n1 1
n1+
n1 q
n1+
np 1
np+
np q
np+
.
Posto (j = 1, ... , q)

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 7
x (1) j =
n1 j
n1+
np j
np+
e (i = 1, ... , p)
x (1) i =
n i 1
n i+
ni q
ni+
,
possiamo scrivere
X (1) = x (1) 1 x (1) q = x (1) 1'
x (1) p'
.
I q vettori x (1) 1 , ... , x (1) q sono detti genericamente variabili associate alla
matrice X (1) ; a loro volta, i p vettori x (1) 1 , ... , x (1) p , che caratterizzano le di-
stribuzioni di frequenze relative di B condizionate alle modalità di A, sono
denominati profili riga e la matrice X (1) è detta matrice dei profili riga.
Infine, il vettore
g (1) =
n+1
n
n+q
n
,
che caratterizza la distribuzione di frequenze relative marginali di B, è detto
profilo marginale di riga.
(ii) Successivamente, si considerino le q distribuzioni di frequenze relative
di A condizionate alle modalità di B, ciascuna delle quali è rappresentata da
8 RENATO LEONI
Modalitàdi A a 1 a p Totale
Frequenzerelative
condizionate
n1 j
n+j
np j
n+j
1
e la distribuzione di frequenze relative marginali di A, rappresentata da
Modalitàdi A a 1 a p Totale
Frequenzerelative
marginali
n1+
n
np+
n1
Riassuntivamente, tali distribuzioni di frequenze relative si possono rap-
presentare mediante il prospetto seguente
Modalità Modalità di B
di A b1 bq
a 1n1 1
n+1
n1 q
n+q
n1+
n
a pnp 1
n+1
np q
n+q
np+
n
Totale 1 1 1
Ciò premesso, si consideri la matrice (3)
X (2) =
n1 1
n+1
np 1
n+1
n1 q
n+q
np q
n+q
.
(3) Si ponga attenzione al fatto che nella matrice che segue le frequenze relative di A condizionatealle modalità di B compaiono nelle righe.

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 9
Posto (i = 1, ... , p)
x (2) i =
n i 1
n+1
ni q
n+q
e (j = 1, ... , q)
x (2) j =
n1 j
n+ j
np j
n+ j
,
possiamo scrivere
X (2) = x (2) 1 x (2) p = x (2) 1'
x (2) q'
.
I p vettori x (2) 1 , ... , x (2) p sono detti genericamente variabili associate alla
matrice X (2) ; a loro volta, i q vettori x (2) 1 , ... , x (2) q , che caratterizzano le di-
stribuzioni di frequenze relative di A condizionate alle modalità di B, sono
denominati profili colonna e la matrice X (2) è detta matrice dei profili
colonna.
Infine, il vettore
g (2) =
n1 +
n
np +
n
,
che caratterizza la distribuzione di frequenze relative marginali di A, è detto
profilo marginale di colonna.

10 RENATO LEONI
2.2 LA STRUTTURA ALGEBRICA
(i) Si consideri anzitutto la matrice X (1) di ordine (p , q) dei profili riga.
Riguardando x (1) 1 , ... , x (1) q e x (1) 1 , ... , x (1) p come vettori appartenenti, ri-
spettivamente, a R(1)p
e R(1)q
, in R(1)p
(spazio delle variabili associate alla
matrice X (1)) e in R(1)q
(spazio dei profili riga) si introduce una struttura di
spazio euclideo nel modo seguente.
In R(1)p
la matrice del prodotto interno − rispetto alla base naturale di R(1)p
− è data da
M (1) = diag (m(1) 1 , ... , m(1) p) = diag n1+
n, ... ,
np+
n
dove m(1) i = n i+/n (i = 1, ... , p) indica il peso attribuito all'i-esimo profilo riga.
Pertanto, poiché si può scrivere (u (1) : vettore colonna di ordine p con
elementi tutti eguali a 1)
g (1) = X (1)' M (1)u (1) ,
g (1) costituisce il baricentro dei p profili riga x (1) 1 , ... , x (1) p .
In R(1)q
la matrice del prodotto interno − rispetto alla base naturale di R(1)q
− è data da (metrica del chi-quadrato)
Q (1) = diag (q(1) 1 , ... , q(1) q) = diag
nn+1
, ... ,n
n+q
dove q(1) j = n/n+j (j = 1, ... , q) denota il reciproco del peso attribuito al j-
esimo profilo colonna.
Tale scelta richiede qualche giustificazione.
A questo proposito, si osservi anzitutto che la distanza (al quadrato) tra
due profili riga x (1) i e x (1) i*, non ponderata, è
Σ j
ni j
n i+ −
n i* j
n i*+
2
.
Ora, ciascuna componente

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 11
ni j
n i+ −
n i* j
n i*+
2
di quest'ultima sommatoria risulta ovviamente influenzata dalla frequenza
relativa marginale n+j /n.
Appare pertanto appropriato relativizzare ogni componente con tale fre-
quenza relativa marginale.
Ma ciò equivale a considerare quale distanza (al quadrato) tra due profili
riga l'espressione
Σ j
ni j
n i+ −
n i* j
n i*+
2
n+j
n = Σ j
ni j
n i+ −
n i* j
n i*+
2
n
n+j
,
ovvero a scegliere Q (1) come matrice rappresentativa del prodotto interno in
R(1)q
.
OSSERVAZIONE 1. La scelta di Q (1) quale matrice rappresentativa del pro-
dotto interno nello spazio dei profili riga − che, tra l'altro, giustifica la deno-
minazione di metrica del chi-quadrato sopra menzionata − implica la
cosiddetta proprietà della equivalenza distribuzionale.
In breve, ciò significa che, aggregando due modalità b j , b j* di B a cui
corrispondono frequenze n i j , n i j* (i = 1, ... , p) proporzionali, la distanza tra
due generici profili riga non muta.
(ii) Si consideri adesso la matrice X (2) di ordine (q , p) dei profili colonna.
Riguardando x (2) 1 , ... , x (2) p e x (2) 1 , ... , x (2) q come vettori appartenenti, ri-
spettivamente, a R(2)q
e R(2)p
, in R(2)q
(spazio delle variabili associate alla
matrice X (2)) e in R(2)p
(spazio dei profili colonna) si introduce una struttura
di spazio euclideo nel modo seguente.
In R(2)q
la matrice del prodotto interno − rispetto alla base naturale di R(2)q
− è data da
M (2) = diag (m(2) 1 , ... , m(2) q) = diag n+1
n, ... ,
n+q
n
dove m(2) j = n+j /n (j = 1, ... , q) denota il peso attribuito al j-esimo profilo

12 RENATO LEONI
colonna.
Pertanto, poiché si può scrivere (u (2) : vettore colonna di ordine q con
elementi tutti eguali a 1)
g (2) = X (2)' M (2)u (2) ,
g (2) costituisce il baricentro dei q profili colonna x (2) 1 , ... , x (2) q .
In R(2)p
la matrice del prodotto interno − rispetto alla base naturale di R(2)p
− è data da (metrica del chi-quadrato)
Q (2) = diag (q(2) 1 , ... , q(2) p) = diag
nn1+
, ... ,n
np+
dove q(2) i = n/ni+ (i = 1, ... , p) denota il reciproco del peso attribuito all'i-
esimo profilo riga.
Ovviamente, la scelta di Q (2) quale matrice rappresentativa del prodotto
interno nello spazio dei profili colonna si giustifica con un ragionamento
simile a quello svolto in precedenza a proposito di Q (1) . Vale inoltre una
considerazione analoga a quella espressa nella Osservazione 1.
OSSERVAZIONE 2. Si noti che risulta
M (1) = diag(g (2)) , Q (1) = M (2)-1 , M (2) = diag(g (1)) , Q (2) = M (1)
-1
e che, posto
X = n1 1 n1 q
np 1 np q
,
si ha
X (1) = M (1)-1 1n X , X (2) = M (2)
-1 1n X' .
OSSERVAZIONE 3. Si ponga attenzione al fatto che R(1)p
e R(2)p
, pur essendo
spazi vettoriali dello stesso ordine, sono dotati di una diversa metrica, e ciò
spiega la ragione per cui si è ritenuto di indicarli con un diverso indice.

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 13
Una annotazione analoga vale ovviamente per quanto riguarda R (1)q
e R(2)q
.
2.3 CONSIDERAZIONI ULTERIORI
(i) Si considerino i p profili riga x (1) 1 , ... , x (1) p e il profilo marginale di riga
g (1) .
Vogliamo mostrare che tali profili appartengono a una opportuna varietà
lineare di R(1)q
.
In effetti, i profili x (1) i (i = 1, ... , p) e g (1) soddisfano le condizioni
ni 1
ni+ +
n i 2
n i+ + ... +
n i q
n i+= 1 ,
n+1
n +
n+2
n + ... +
n+q
n= 1
da cui
ni 1
ni+= 1 −
n i 2
n i+− ... −
ni q
ni+ ,
n+1
n= 1 −
n+2
n− ... −
n+q
n .
Pertanto,
x (1) i =
n i 1
n i+
ni 2
ni+
ni q
ni+
=
1 − n i 2
n i+− ... −
ni q
ni+
ni 2
ni+
ni q
ni+
=
10
0
+
−11
0
ni 2
ni+ + ... +
−10
1
ni q
ni+
e
g (1) =
n+1
nn+2
n
n+q
n
=
1 − n+2
n− ... −
n+q
nn+2
n
n+q
n
=
10
0
+
−11
0
n+2
n + ... +
−10
1
n+q
n .

14 RENATO LEONI
Questo vuol dire che ciascun profilo appartiene alla varietà lineare (iper-
piano di dimensione q − 1) ottenuta mediante la traslazione
10
0
del sottospazio vettoriale di R(1)q , generato dai q − 1 vettori linearmente
indipendenti
−11
0
, ... ,
−10
1
.
Inoltre, come si verifica subito, il vettore g (1) , tale che g (1)' Q (1) g (1) = 1, è
ortogonale a quest'ultimo sottospazio vettoriale.
Ovviamente, annotazioni del tutto analoghe valgono per i q profili colonna
x (2) 1 , ... , x (2) q e il profilo marginale di colonna g (2) .
(ii) Si considerino nuovamente i p profili riga x (1) 1 , ... , x (1) p e il profilo margi-
nale di riga g (1) .
Qui sopra abbiamo posto in evidenza che tali profili appartengono a una
opportuna variatà lineare (iperpiano di dimensione q − 1).
L'argomento può essere utilmente approfondito introducendo il concetto
di simplesso e quelle a esso collegato di coordinate baricentriche.
Siano v (1) 1 , ... , v (1) q un insieme di q vettori linearmente indipendenti
appartenenti a R(1)q
.
Si chiama simplesso di vertici v (1) 1 , ... , v (1) q l'insieme
{x (1) x (1) = c(1) 1 v (1) 1 + ... + c(1) q v (1) q , c (1) j ≥ 0 (j = 1, ... , q) , Σ j c (1) j = 1} .
I coefficienti c(1) 1 , ... , c(1) q , tali che c(1) j ≥ 0 (j = 1, ... , q) e Σj c (1) j = 1, sono
detti le coordinate baricentriche di x (1) rispetto a v (1) 1 , ... , v (1) q .
Identificando v (1) 1 , ... , v (1) q con i vettori u (1) 1 , ... , u (1) q che formano la base

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 15
naturale di R(1)q , è immediato riconoscere che sia i profili riga sia il profilo
marginale di riga appartengono al simplesso di vertici u (1) 1 , ... , u (1) q , poiché
risulta
x (1) i =
n i 1
n i+
ni 2
ni+
ni q
ni+
= ni 1
ni+
10
0
+ ... + n i q
n i+
00
1
= n i 1
n i+ u (1) 1 + ... +
n i q
n i+ u (1) q
con ni j
n i+ ≥ 0 (j = 1, ... , q) , Σ j
n i j
n i+ = 1, e
g (1) =
n+1
nn+2
n
n+q
n
= n+1
n
10
0
+ ... + n+q
n
00
1
.
con n+j
n > 0 (j = 1, ... , q) , Σ j
n+j
n = 1.
Ovviamente,
ni 1
ni+ , ... ,
n i q
n i+ e
n+1
n , ... ,
n+q
n
sono le coordinate baricentriche di x (1) i e g (1) rispetto a u (1) 1 , ... , u (1) q .
Si noti esplicitamente che (Fig. 1)
• per q = 2, il simplesso di vertici u (1) 1 , u (1) 2 è un segmento, sottoinsieme di
una retta (varietà lineare di dimensione 1);
• per q = 3, il simplesso di vertici u (1) 1 , u (1) 2 , u (1) 3 è un triangolo, sotto-
insieme di un piano (varietà lineare di dimensione 2).
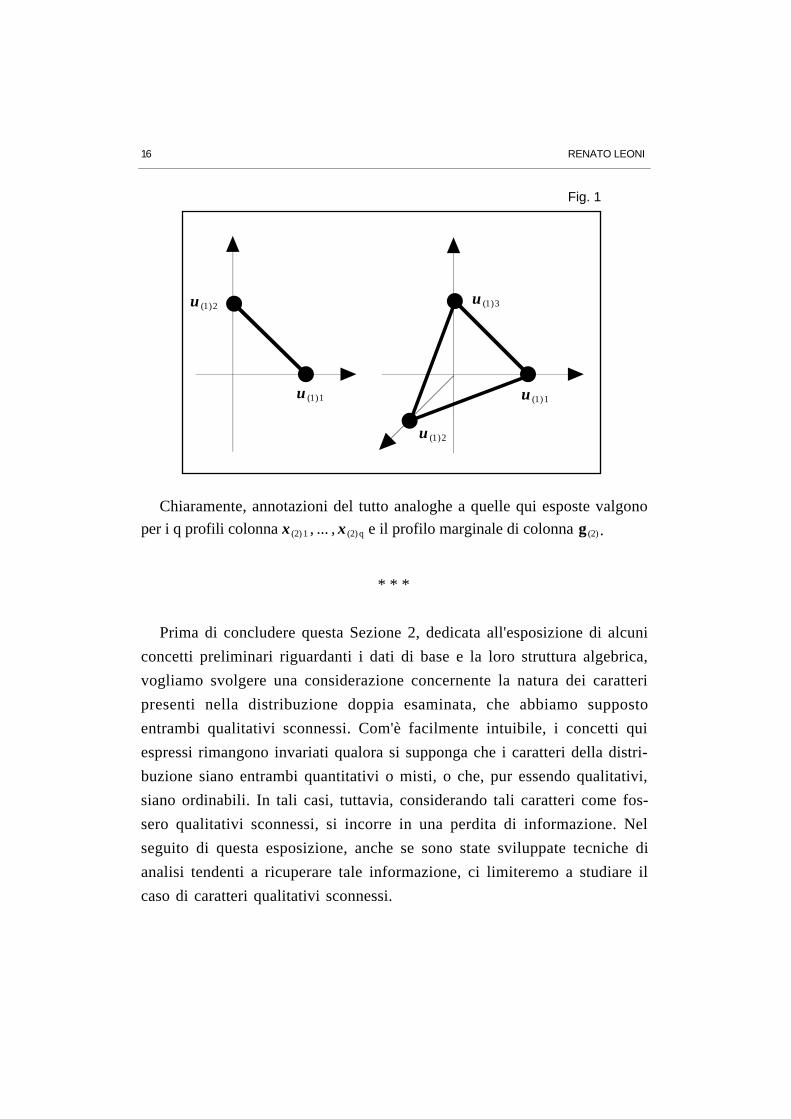
16 RENATO LEONI
u (1)1
u (1)2
u (1)1
u (1)2
u (1)3
Fig. 1
Chiaramente, annotazioni del tutto analoghe a quelle qui esposte valgono
per i q profili colonna x (2) 1 , ... , x (2) q e il profilo marginale di colonna g (2) .
* * *
Prima di concludere questa Sezione 2, dedicata all'esposizione di alcuni
concetti preliminari riguardanti i dati di base e la loro struttura algebrica,
vogliamo svolgere una considerazione concernente la natura dei caratteri
presenti nella distribuzione doppia esaminata, che abbiamo supposto
entrambi qualitativi sconnessi. Com'è facilmente intuibile, i concetti qui
espressi rimangono invariati qualora si supponga che i caratteri della distri-
buzione siano entrambi quantitativi o misti, o che, pur essendo qualitativi,
siano ordinabili. In tali casi, tuttavia, considerando tali caratteri come fos-
sero qualitativi sconnessi, si incorre in una perdita di informazione. Nel
seguito di questa esposizione, anche se sono state sviluppate tecniche di
analisi tendenti a ricuperare tale informazione, ci limiteremo a studiare il
caso di caratteri qualitativi sconnessi.

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 17
3 LA ACP DELLE MATRICI DEI PROFILI RIGA E COLONNA
Come si è accennato nella Premessa, la ASC ha come obiettivo lo studio
della struttura di una distribuzione doppia di frequenze.
Si è anche detto che della ASC esistono varie versioni. Una di queste,
alla cui esposizione è dedicato il presente lavoro, consiste nello studio delle
configurazioni assunte dai profili riga e colonna − che caratterizzano, rispet-
tivamente, le distribuzioni di frequenze relative di B condizionate alle
modalità di A e le distribuzioni di frequenze relative di A condizionate alle
modalità di B − mediante l'applicazione della analisi delle componenti prin-
cipali (ACP) (4) sia alla matrice dei profili riga (Sezione 4) sia alla matrice
dei profili colonna (Sezione 5) (5) (6).
OSSERVAZIONE 4. Si osservi che le matrici dei profili riga e colonna sono
ciascuna del tipo «individui×variabili», come accade per la matrice dei dati di
una ordinaria ACP.
Tuttavia, mentre gli individui, rappresentati nelle righe delle matrici dei
profili, hanno un significato sostanziale, le variabili, rappresentate nei
vettori colonna delle suddette matrici, assumono in questo contesto un
significato puramente formale.
(4) Le nozioni essenziali riguardanti la ACP a cui faremo riferimento sono contenute in [15].
(5) L'esposizione contenuta nella Sezione 5, che segue lo stesso schema di quella contenuta nellaSezione 4, è svolta sia per ragioni di completezza sia per un eccesso di pedanteria da parte di chiscrive.
(6) Tra i risultati delle due ACP intercorrono molteplici relazioni che saranno poste in evidenza inun secondo momento (Sezione 6).

18 RENATO LEONI
4 LA ACP DELLA MATRICE DEI PROFILI RIGA
4.1 I PRINCIPALI RISULTATI ALGEBRICI
Si consideri la matrice X (1) di ordine (p , q) dei profili riga.
A questa è possibile associare la matrice dei profili riga, centrata rispetto
al baricentro g (1) , data da
Y(1) = X (1) − u (1) g (1)' =
n1 1
n1+
n1 q
n1+
np 1
np+
np q
np+
− 1
1
n+1
n
n+q
n
=
n1 1
n1+ −
n+1
n
n1 q
n1+ −
n+q
n
np 1
np+ −
n+1
n
np q
np+ −
n+q
n
la quale − posto (j = 1, ... , q; i = 1, ... , p)
y (1) j =
n1 j
n1+ −
n+ j
n
np j
np+ −
n+ j
n
, y (1) i =
n i 1
n i+ −
n+1
n
ni q
ni+ −
n+q
n
− può essere scritta nella forma
Y(1) = y (1) 1 y (1) q =
y (1) 1'
y (1) p'
.
Considerata l'equazione fondamentale della ACP
(1) V(1)Q (1)c (1) = λ (1)c (1)
dove

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 19
V(1) = Y (1)' M (1)Y(1) = X (1)' M (1)X (1) − g (1) g (1)'
rappresenta la matrice di inerzia (di ordine (q ,q)) rispetto al baricentro g (1)
dei p profili riga x (1) 1 , ... , x (1) p, dalla (1) si ottengono
• q autovalori (reali) λ (1) 1 , ... , λ (1) q tali che
λ (1) 1 ≥ ... ≥ λ (1) q ≥ 0 ;
• q vettori principali c (1) 1 , ... , c (1) q − associati, rispettivamente, agli autova-
lori λ (1) 1 , ... , λ (1) q − tali che, posto
C (1) = [ c (1) 1 c (1) q ] ,
si abbia
C (1)' Q(1)C (1) = I q ;
• q componenti principali y (1) 1 = Y (1)Q (1)c (1) 1 , ... , y (1) q = Y (1)Q (1)c (1) q tali che,
posto
Y (1) = [ y (1) 1 y (1) q ] , D (1) = diag (λ (1) 1 , ... , λ (1) q) ,
si abbia
Y (1)' M(1)Y (1) = D (1) .
Si noti che r (1) = r(Y(1)) = r(V (1)) = r(V (1)Q(1)) = r(Y (1)) = r(D (1)) ed è
r (1) = 0 se soltanto se Y(1) = O, vale a dire, come è facile verificare, se e
soltanto se tra i caratteri A e B sussiste indipendenza statistica.
D'altra parte, è r (1) < q perché, postmoltiplicando ambo i membri di Y(1) =X (1) − u (1) g (1)' per il vettore non nullo Q (1) g (1) , si ottiene (X (1)Q (1) g (1) = u (1) ;
g (1)' Q (1) g (1) = 1)
Y(1)Q (1) g (1) = X (1)Q (1) g (1) − u (1) g (1)' Q (1) g (1) = u (1) − u (1) = 0
e, quindi, non può risultare r (1) = q.

20 RENATO LEONI
Escluso il caso banale in cui sia Y(1) = O, da quanto detto, si deduce che,
in generale, la (1) ammette r (1) (0 < r (1) ≤ q −1) autovalori positivi λ (1) 1 ,
... , λ (1) r (1) a cui sono associati i vettori principali c (1) 1 , ... , c (1) r (1)
e q − r (1)
autovalori nulli λ (1) r (1) +1 = ... = λ (1) q a cui sono associati i vettori principali
c (1) r (1) +1 , ... , c (1) q .
Tuttavia, poiché risulta V(1)Q (1) g (1) = 0, g (1) è un autovettore corrispon-
dente a un autovalore nullo.
Infine, per quanto riguarda le componenti principali, si ha (j = 1 , ... , r (1))
y (1) j = Y (1)Q (1)c (1) j ≠ 0
e (j = r (1) +1 , ... , q)
y (1) j = Y (1)Q (1)c (1) j = 0 .
La situazione che abbiamo descritto è riassunta nel quadro seguente,
dove si è identificato c (1) r (1) +1 con g (1) .
Analisi condotta sulla base della matrice centrata Y (1) (equazione (1))
Autovalori Vettori principali Componenti principali
λ (1) 1 c (1) 1 y (1) 1 = Y(1)Q (1)c (1) 1
λ (1) r (1) c (1) r (1) y (1) r (1) = Y(1)Q (1)c (1) r (1)
λ (1) r (1) +1 = 0 g (1) y (1) r (1) +1 = 0
λ (1) q = 0
c (1) q y (1) q = 0
Si osservi adesso che si ha
• per j = 1 , ... , r (1) ( g (1)' Q (1)c (1) j = 0)
{X (1)' M (1)X (1)Q (1)c (1) j − g (1) g (1)' Q (1)c (1) j = λ (1) jc (1) j}
⇔ {X (1)' M (1)X (1)Q (1)c (1) j = λ (1) jc (1) j} ;

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 21
• per j = r (1) +1 (c (1) r (1) +1 = g (1) ; g (1)' Q (1) g (1) = 1)
{X (1)' M (1)X (1)Q (1) g (1) − g (1) g (1)' Q (1) g (1) = 0}
⇔ {X (1)' M (1)X (1)Q (1) g (1) = g (1)} ;
• per j = r (1) +2 , ... , q ( g (1)' Q (1)c (1) j = 0)
{X (1)' M (1)X (1)Q (1)c (1) j − g (1) g (1)' Q (1)c (1) j = 0}
⇔ {X (1)' M (1)X (1)Q (1)c (1) j = 0} .
Ciò significa che l'equazione
(1') S (1)Q (1)c* (1) = λ * (1)c* (1) ,
dove
S (1) = X (1)' M (1)X (1)
rappresenta la matrice di inerzia (di ordine (q ,q)) rispetto all'origine dei p
profili riga x (1) 1 , ... , x (1) p , ammette gli stessi autovalori e autovettori della
equazione (1), tranne che − in luogo dell'autovalore λ (1) r (1) +1 = 0 a cui ab-
biamo associato il vettore principale c (1) r (1) +1 = g (1) − si ha l'autovalore
λ * (1) r (1) +1 = 1 a cui è associato il medesimo vettore principale g (1) .
Ovviamente, per quanto riguarda le componenti principali risulta
• per j = 1 , ... , r (1)
X (1)Q (1)c (1) j = (X (1) − u (1) g (1)' ) Q (1)c (1) j = Y (1)Q (1)c (1) j = y (1) j ≠ 0 ;
• per j = r (1) +1
X (1)Q (1) g (1) = u (1) ≠ y (1) j = 0 ;
• per j = r (1) +2 , ... , q
X (1)Q (1)c (1) j = (X (1) − u (1) g (1)' ) Q (1)c (1) j = Y (1)Q (1)c (1) j = y (1) j = 0 .
La situazione che abbiamo ora descritto è riassunta nel quadro seguente.

22 RENATO LEONI
Analisi condotta sulla base della matrice non centrata X (1) (equazione (1'))
Autovalori Vettori principali X (1)Q (1)c (1) j
λ * (1) 1 = λ (1) 1 c ∗ (1) 1 = c (1) 1 y (1) 1 ≠ 0
λ * (1) r (1) = λ (1) r (1) c * (1) r (1)
= c (1) r (1)y (1) r (1)
≠ 0
λ * (1) r (1) +1 = 1 c * (1) r (1) +1 = g (1) u (1)
λ * (1) q = 0 c * (1) q = c (1) q y (1) q = 0
Due ulteriori punti che occorre menzionare sono i seguenti.
Il primo riguarda il significato da attribuire all'inerzia rispetto al baricentro
g (1) dei p profili riga x (1) 1 , ... , x (1) p , vale a dire alla quantità
Ig (1) = tr (V (1)Q (1)) = tr (D (1)) = λ (1) 1 + ... + λ (1) r (1)
.
Ora, un semplice calcolo mostra che
tr (V (1)Q (1)) = tr ((Y (1)' M (1)Y(1))Q (1))
= tr ((X (1)' M (1)X (1) − g (1) g (1)' ) Q (1))
= tr (X (1)' M (1)X (1)Q (1)) − tr ( g (1) g (1)' Q (1))
= tr (X (1)' M (1)X (1)Q (1)) − tr ( g (1)' Q (1) g (1))
= tr (X (1)' M (1)X (1)Q (1)) − 1
= Σ i Σ j n i j
2
n i + n+ j
− 1 = ϕ 2 .
Pertanto, l'inerzia rispetto al baricentro dei p profili riga x (1) 1 , ... , x (1) p non
è altro che il noto indice di contingenza media quadratica (Pearson).
Il secondo punto riguarda la cosiddetta ricostruzione delle matrici Y(1) e
X (1) (scomposizione in valori singolari).

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 23
Nel caso di Y(1) , si ha
Y(1) = y (1) 1 c (1) 1' + ... + y (1) r (1) c (1) r (1)
'
= [ y (1) 1 y (1) r (1)0 0 ]
c (1) 1'
c (1) r (1)'
g (1)'
c (1) q'
= Y (1) C (1)' .
Nel caso di X (1) , risulta
X (1) = y (1) 1 c (1) 1' + ... + y (1) r (1) c (1) r (1)
' + u (1) g (1)'
= [ y (1) 1 y (1) r (1)u (1) 0 ]
c (1) 1'
c (1) r (1)'
g (1)'
c (1) q'
= Y* (1) C (1)' .
4.2 LA RAPPRESENTAZIONE GRAFICA DEI PROFILI RIGA
Considerati i p profili riga (misurati in termini di deviazioni dal baricentro)
y (1) 1 = x (1) 1 − g (1) , ... , y (1) p = x (1) p − g (1) , la loro rappresentazione grafica
usuale si ottiene, come in una ordinaria ACP, proiettando ortogonalmente
tali profili riga nel sottospazio generato dal vettore c (1) 1 (asse principale) o
nel sottospazio generato dai vettori c (1) 1 , c (1) 2 (piano principale).
Ora, la coordinata della proiezione ortogonale y (1) i di y (1) i nel sottospazio
generato da c (1) h (h = 1 , 2), rispetto a c (1) h , è data da (u (1) i : vettore colonna
di ordine p a elementi tutti nulli tranne l'elemento i-esimo posto eguale a 1)
c (1) h' Q (1)y (1) i = c (1) h' Q (1)Y(1)' u (1) i = y (1) h' u (1) i = y(1) h , i
dove y(1) h , i denota l'elemento i-esimo della componente principale (vettore

24 RENATO LEONI
colonna di ordine p) y (1) h .
Pertanto, le coordinate della proiezione ortogonale y (1) i di y (1) i nel piano
principale, per esempio, sono (y(1) 1 , i , y (1) 2 , i).
I criteri in base ai quali si giudica della bontà di tale rappresentazione
sono analoghi a quelli di una ordinaria ACP.
Sempre con riferimento al piano principale, la qualità globale della rappre-
sentazione di y (1) 1 , ... , y (1) p si può misurare mediante l'indice
GQRI1 = λ (1) 1 + λ (1) 2
λ (1) 1 + ... + λ (1) q
.
A sua volta, la qualità della rappresentazione di y (1) i si può misurare
attraverso l'indice
QR(i ; c (1) 1 , c (1) 2) = y (1) 1 , i
2 + y (1) 2 , i2
y (1) 1 , i2 + ... + y (1) q , i
2 .
Infine, nell'interpretare i risultati dell'analisi, dato che M (1) non è in
generale una matrice scalare, risulta importante procedere all'esame degli
indici
C(i ; c (1) 1) =
n i+
n y (1) 1 , i
2
λ (1) 1
, C(i ; c (1) 2) =
n i+
n y (1) 2 , i
2
λ (1) 2
che consentono di individuare tra y (1) 1 , ... , y (1) p quel profilo riga il cui con-
tributo all'inerzia spiegata dal sottospazio in considerazione è comparati-
vamente maggiore.
Si osservi anche che la proiezione ortogonale y (1) i di y (1) i nel sottospazio
generato da c (1) h (h = 1 , 2) è eguale alla proiezione ortogonale x (1) i di x (1) i
nel medesimo sottospazio.
In effetti, tenuto conto del fatto che c (1) h' Q (1) g (1) = 0, risulta
y (1) i = c (1) h c (1) h' Q (1)y (1) i = c (1) h c (1) h' Q (1)(x (1) i − g (1)) = c (1) h c (1) h' Q (1)x (1) i = x (1) i
e questo significa che è indifferente considerare y (1) i oppure x (1) i .

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 25
5 LA ACP DELLA MATRICE DEI PROFILI COLONNA
5.1 I PRINCIPALI RISULTATI ALGEBRICI
Si consideri la matrice X (2) di ordine (q , p) dei profili colonna.
A questa è possibile associare la matrice dei profili colonna, centrata
rispetto al baricentro g (2) , data da
Y(2) = X (2) − u (2) g (2)' =
n1 1
n+1
np 1
n+1
n1 q
n+q
np q
n+q
− 1
1
n1 +
n
np +
n
=
n1 1
n+1
− n1 +
n
np 1
n+1
− np +
n
n1 q
n+q
− n1 +
n
np q
n+q
− np +
n
la quale − posto (j = 1, ... , q; i = 1, ... , p)
y (2) i =
n i 1
n+1
− ni +
n
ni q
n+q
− ni +
n
, y (2) j =
n1 j
n+j
− n1 +
n
np j
n+j
− np +
n
− può essere scritta nella forma
Y(1) = y (1) 1 y (1) q =
y (1) 1'
y (1) p'
.
Considerata l'equazione
(2) V(2)Q (2)c (2) = λ (2)c (2)
dove

26 RENATO LEONI
V(2) = Y (2)' M (2)Y(2) = X (2)' M (2)X (2) − g (2) g (2)'
rappresenta la matrice di inerzia (di ordine (p ,p)) rispetto al baricentro g (2) ,
dei p profili colonna x (2) 1 , ... , x (2) q , dalla (2) si ottengono
• p autovalori (reali) λ (2) 1 , ... , λ (2) p tali che
λ (2) 1 ≥ ... ≥ λ (2) p ≥ 0 ;
• p vettori principali c (2) 1 , ... , c (2) p − associati, rispettivamente, agli autova-
lori λ (2) 1 , ... , λ (2) p − tali che, posto
C (2) = [ c (2) 1 c (2) p ] ,
si abbia
C (2)' Q(2)C (2) = I p ;
• p componenti principali y (2) 1 = Y (2)Q (2)c (2) 1 , ... , y (2) p = Y (2)Q (2)c (2) p tali che,
posto
Y (2) = [ y (2) 1 y (2) p ] , D (2) = diag (λ (2) 1 , ... , λ (2) p) ,
si abbia
Y (2)' M(2)Y (2) = D (2) .
Si noti che r (2) = r(Y(2)) = r(V (2)) = r(V (2)Q(2)) = r(Y (2)) = r(D (2)) ed è
r (2) = 0 se soltanto se Y(2) = O, vale a dire, come è facile verificare, se e
soltanto se tra i caratteri A e B sussiste indipendenza statistica.
D'altra parte, è r (2) < p perché, postmoltiplicando ambo i membri di Y(2) =X (2) − u (2) g (2)' per il vettore non nullo Q (2) g (2) , si ottiene (X (2)Q (2) g (2) = u (2) ;
g (2)' Q (2) g (2) = 1)
Y(2)Q (2) g (2) = X (2)Q (2) g (2) − u (2) g (2)' Q (2) g (2) = u (2) − u (2) = 0
e, quindi, non può essere r (2) = p.

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 27
Escluso il caso banale in cui sia Y(2) = O, da quanto detto, si deduce che,
in generale, la (2) ammette r (2) (0 < r (2) ≤ p −1) autovalori positivi λ (2) 1 ,
... , λ (1) r (2) a cui sono associati i vettori principali c (2) 1 , ... , c (2) r (2)
e p − r (2)
autovalori nulli λ (2) r (2) +1 = ... = λ (2) p a cui sono associati i vettori principali
c (2) r (2) +1 , ... , c (2) p .
Tuttavia, poiché risulta V(2)Q (2) g (2) = 0, g (2) è un autovettore corrispon-
dente a un autovalore nullo.
Infine, per quanto riguarda le componenti principali, si ha (i = 1 , ... , r (2))
y (2) i = Y (2)Q (2)c (2) i ≠ 0
e (i = r (2) +1 , ... , p)
y (2) i = Y (2)Q (2)c (2) i = 0 .
La situazione che abbiamo descritto è riassunta nel quadro seguente,
dove si è identificato c (2) r (2) +1 con g (2) .
Analisi condotta sulla base della matrice centrata Y(2) (equazione (2))
Autovalori Vettori principali Componenti principali
λ (2) 1 c (2) 1 y (2) 1 = Y(2)Q (2)c (2) 1
λ (2) r (2) c (2) r (2) y (2) r (2)= Y(2)Q (2)c (2) r (2)
λ (2) r (2) +1 = 0 g (2) y (2) r (2) +1 = 0
λ (2) p = 0 c (2) p y (2) p = 0
Si osservi adesso che si ha
• per i = 1 , ... , r (2) ( g (2)' Q (2)c (2) i = 0)
{X (2)' M (2)X (2)Q (2)c (2) i − g (2) g (2)' Q (2)c (2) i = λ (2) ic (2) i}
⇔ {X (2)' M (2)X (2)Q (2)c (2) i = λ (2) jc (2) i} ;
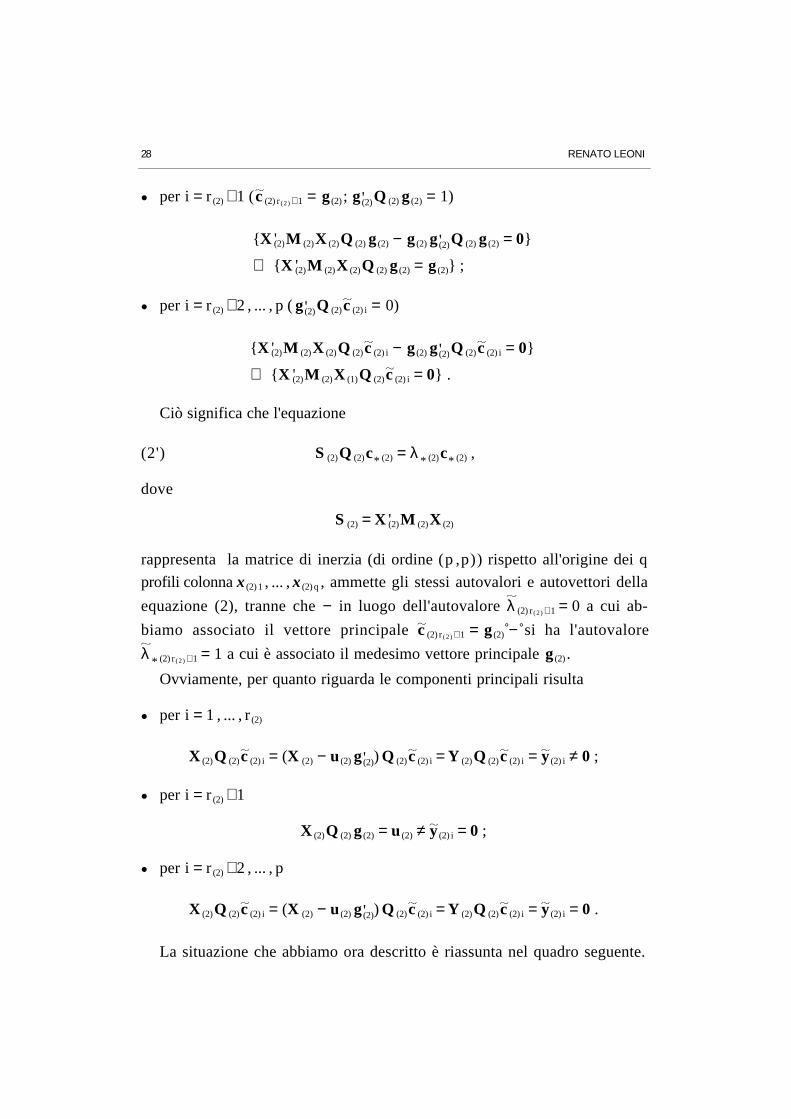
28 RENATO LEONI
• per i = r (2) +1 (c (2) r (2) +1 = g (2) ; g (2)' Q (2) g (2) = 1)
{X (2)' M (2)X (2)Q (2) g (2) − g (2) g (2)' Q (2) g (2) = 0}
⇔ {X (2)' M (2)X (2)Q (2) g (2) = g (2)} ;
• per i = r (2) +2 , ... , p ( g (2)' Q (2)c (2) i = 0)
{X (2)' M (2)X (2)Q (2)c (2) i − g (2) g (2)' Q (2)c (2) i = 0}
⇔ {X (2)' M (2)X (1)Q (2)c (2) i = 0} .
Ciò significa che l'equazione
(2') S (2)Q (2)c* (2) = λ * (2)c* (2) ,
dove
S (2) = X (2)' M (2)X (2)
rappresenta la matrice di inerzia (di ordine (p ,p)) rispetto all'origine dei q
profili colonna x (2) 1 , ... , x (2) q , ammette gli stessi autovalori e autovettori della
equazione (2), tranne che − in luogo dell'autovalore λ (2) r (2) +1 = 0 a cui ab-
biamo associato il vettore principale c (2) r (2) +1 = g (2) − si ha l'autovalore
λ * (2) r (2) +1 = 1 a cui è associato il medesimo vettore principale g (2) .
Ovviamente, per quanto riguarda le componenti principali risulta
• per i = 1 , ... , r (2)
X (2)Q (2)c (2) i = (X (2) − u (2) g (2)' ) Q (2)c (2) i = Y (2)Q (2)c (2) i = y (2) i ≠ 0 ;
• per i = r (2) +1
X (2)Q (2) g (2) = u (2) ≠ y (2) i = 0 ;
• per i = r (2) +2 , ... , p
X (2)Q (2)c (2) i = (X (2) − u (2) g (2)' ) Q (2)c (2) i = Y (2)Q (2)c (2) i = y (2) i = 0 .
La situazione che abbiamo ora descritto è riassunta nel quadro seguente.

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 29
Analisi condotta sulla base della matrice non centrata X (2) (equazione (2'))
Autovalori Vettori principali X(2)Q (2)c (2) i
λ * (2) 1 = λ (2) 1 c * (2) 1 = c (2) 1 y (2) 1 ≠ 0
λ * (2) r (2) = λ (2) r (2)
c * (2) r (2)= c (2) r (2)
y (2) r (2) ≠ 0
λ * (2) r (2) +1 = 1 c * (2) r (2) +1 = g (2) u (2)
λ * (2) p = 0 c * (2) p = c (2) p y (2) p = 0
Due ulteriori punti che occorre menzionare sono i seguenti.
Il primo riguarda il significato da attribuire all'inerzia rispetto al baricentro
dei q profili colonna x (2) 1 , ... , x (2) q , vale a dire alla quantità
Ig (2) = tr (V (2)Q (2)) = tr (D (2)) = λ (2) 1 + ... + λ (2) r (2)
.
Ora, un semplice calcolo mostra che
tr (V (2)Q (2)) = tr ((Y (2)' M (2)Y(2))Q (2))
= tr ((X (2)' M (2)X (2) − g (2) g (2)' ) Q (2))
= tr (X (2)' M (2)X (2)Q (2)) − tr ( g (2) g (2)' Q (2))
= tr (X (2)' M (2)X (2)Q (2)) − tr ( g (2)' Q (2) g (2))
= tr (X (2)' M (1)X (2)Q (2)) − 1
= Σ i Σ j n i j
2
n i + n+j − 1 = ϕ 2 .
Pertanto, l'inerzia rispetto al baricentro dei q profili colonna x (2) 1 , ... , x (2) q
non è altro che il noto indice di contingenza media quadratica (Pearson).
Ovviamente, Ig (2) = ϕ 2 = Ig ( 1 )
.
Il secondo punto riguarda la cosiddetta ricostruzione delle matrici Y(2) e
X (2) (scomposizione in valori singolari).
Nel caso di Y(2) , si ha

30 RENATO LEONI
Y(2) = y (2) 1 c (2) 1' + ... + y (2) r (2) c (2) r (2)
'
= [ y (2) 1 y (2) r (2)0 0 ]
c (2) 1'
c (2) r (2)'
g (2)'
c (2) p'
= Y (2) C (2)' .
Nel caso di X (2) , risulta
X (2) = y (2) 1 c (2) 1' + ... + y (2) r (2) c (2) r (2)
' + u (2) g (2)'
= [ y (2) 1 y (2) r (2)u (2) 0 ]
c (2) 1'
c (2) r (2)'
g (2)'
c (2) p'
= Y* (2) C (2)' .
5.2 LA RAPPRESENTAZIONE GRAFICA DEI PROFILI COLONNA
Considerati i q profili colonna (misurati in termini di deviazioni dal
baricentro) y (2) 1 = x (2) 1 − g (2) , ... , y (2) q = x (2) q − g (2) , la loro rappresentazione
grafica usuale si ottiene, come in una ordinaria ACP, proiettando
ortogonalmente tali profili colonna nel sottospazio generato dal vettore c (2) 1
(asse principale) o nel sottospazio generato dai vettori c (2) 1 , c (2) 2 (piano
principale).
Ora, la coordinata della proiezione ortogonale y (2) j di y (2) j nel sottospazio
generato da c (2) h (h = 1 , 2) è data da (u (2) j : vettore colonna di ordine q a
elementi tutti nulli tranne l'elemento j-esimo)
c (2) h' Q (2)y (2) j = c (2) h' Q (2)Y(2)' u (2) j = y (2) h' u (2) j = y(2) h , j
dove y(2) h , j denota l'elemento j-esimo della componente principale (vettore

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 31
colonna di ordine q) y (2) h .
Pertanto, le coordinate della proiezione ortogonale y (2) j di y (2) j nel piano
principale, per esempio, sono (y(2) 1 , j , y (2) 2 , j).
I criteri in base ai quali si giudica della bontà di tale rappresentazione
sono analoghi a quelli di una ordinaria ACP.
Sempre con riferimento al piano principale, la qualità globale della
rappresentazione di y (2) 1 , ... , y (2) q si può misurare mediante l'indice
GQRI2 = λ (2) 1 + λ (2) 2
λ (2) 1 + ... + λ (2) p
.
A sua volta, la qualità della rappresentazione di y (2) j si può misurare
attraverso l'indice
QR(j ; c (2) 1 , c (2) 2) = y (2) 1 , j
2 + y (2) 2 , j2
y (2) 1 , j2 + ... + y (2) p , j
2 .
Infine, nell'interpretare i risultati dell'analisi, dato che M (2) non è in
generale una matrice scalare, risulta importante esaminare gli indici
C(j ; c (2) 1) =
n+ j
n y (2) 1 , j
2
λ (2) 1
, C(j ; c (2) 2) =
n+ j
n y (2) 2 , j
2
λ (2) 2
che consentono di individuare tra y (2) 1 , ... , y (2) q quel profilo colonna il cui
contributo all'inerzia spiegata dal sottospazio in considerazione è compara-
tivamente maggiore.
Si osservi anche che la proiezione ortogonale y (2) j di y (2) j nel sottospazio
generato da c (2) h (h = 1 , 2) è eguale alla proiezione ortogonale x (2) j di x (2) j
nel medesimo sottospazio.
In effetti, tenuto conto del fatto che c (2) h' Q (2) g (2) = 0, risulta
y (2) j = c (2) h c (2) h' Q (2)y (2) j = c (2) h c (2) h' Q (2)(x (2) j − g (2)) = c (2) h c (2) h' Q (2)x (2) j = x (2) j
e questo significa che è indifferente considerare y (2) j oppure x (2) j .

32 RENATO LEONI
6 RELAZIONI TRA I RISULTATI DELLE DUE ACP
6.1 RELAZIONI ALGEBRICHE
Nelle sezioni immediatamente precedenti abbiamo indicato i principali
risultati che si ottengono da una ACP condotta sia sulla matrice dei profili
riga sia sulla matrice dei profili colonna. Vogliamo adesso porre in evidenza
le relazioni algebriche che intercorrono tra i risultati delle due ACP.
1. Si osservi anzitutto che, poiché
X (1) = M (1)-1 1n X , X (2) = M (2)
-1 1n X' ,
risulta (Q (1) = M (2)-1 , Q (2) = M (1)
-1 )
X (1)' M (1)X (1)Q (1) = X '1n M (1)
-1 M (1)M (1)-1 1
n XM (2)-1 = X '1
n M (1)-1 X 1
n M (2)-1 ,
X (2)' M (2)X (2)Q (2) = X 1n M (2)
-1 M (2)M (2)-1 1
n X'M (1)-1 = X 1
n M (2)-1 X ' 1
n M (1)-1 .
Ne consegue che le equazioni (1') e (2') − e, quindi, le (1) e (2) − ammet-
tono i medesimi autovalori λ (1) 1 = λ (2) 1 = λ 1 , ... , λ (1) r (1) = λ (2) r (2)
= λ r.
2. (Formule di transizione) Dalle relazioni (h = 1 , ... , r)
X '1n M (1)
-1 X 1n M (2)
-1 c (1) h = λ h c (1) h , X 1n M (2)
-1 X ' 1n M (1)
-1 c (2) h = λ h c (2) h ,
premoltiplicando la prima per X1n M (2)
-1 e moltiplicando per 1
λ h
, si ottiene
X1n M (2)
-1 X '1n M (1)
-1 ( 1
λ h
X 1n M (2)
-1 c (1) h) = λ h ( 1
λ h
X 1n M (2)
-1 c (1) h)
e, quindi,
c (2) h = 1
λ h
X 1n M (2)
-1 c (1) h = 1
λ h
X (2)' c (1) h .
Con un ragionamento simile, si dimostra poi che
c (1) h = 1
λ h
X ' 1n M (1)
-1 c (2) h = 1
λ h
X (1)' c (2) h .

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 33
3. (Formule di transizione) Tenuto conto che le formule di transizione di
cui al punto precedente, si verifica facilmente che risulta (h = 1 , ... , r)
y (2) h = 1
λ h
X (2)y (1) h , y (1) h = 1
λ h
X (1)y (2) h .
4. (Relazioni quasi baricentriche) Si ricordi anzitutto che, rispetto a c (1) h ,
la coordinata della proiezione ortogonale di y (1) i nel sottospazio generato da
c (1) h è data da y(1) h , i e che, analogamente, rispetto a c (2) h , la coordinata della
proiezione ortogonale di y (2) j nel sottospazio generato da c (2) h è data da
y(2) h , j (Sezioni 4.2 e 5.2).
Ma, tenuto conto di quanto detto al punto precedente, si ha che
y(1) h , i = y (1) h' u (1) i
= 1
λ h
y (2) h' X (1)' u (1) i = 1
λ h
y(2) h , 1 y(2) h , q
n1 1
n1+
np 1
np+
n1 q
n1+
np q
np+
u (1) i
= 1
λ h
y(2) h , 1 y(2) h , q
n i 1
n i+
ni q
ni+
= 1
λ h
Σ j y(2) h , j n i j
n i+ ,
ovvero che, a meno del fattore
1
λ h
,
la coordinata, rispetto a c (1) h , della proiezione ortogonale di y (1) i nel
sottospazio generato da c (1) h è il baricentro delle coordinate, rispetto a c (2) h ,
delle proiezioni ortogonali di y (2) 1 , ... , y (2) q nel sottospazio generato da c (2) h .
Con un ragionamento del tutto simile, si dimostra poi che
y(2) h , j = 1
λ h
Σ i y(1) h , i n i j
n+j
,

34 RENATO LEONI
ovvero che, a meno del fattore
1
λ h
,
la coordinata, rispetto a c (2) h , della proiezione ortogonale di y (2) j nel
sottospazio generato da c (2) h è il baricentro delle coordinate, rispetto a c (1) h ,
delle proiezioni ortogonali di y (1) 1 , ... , y (1) p nel sottospazio generato da c (1) h .
OSSERVAZIONE 5. Vogliamo mostrare che λ h ≤ 1 e, quindi, che 1 λ h ≥ 1
(coefficiente di dilatazione).
In effetti, tenuto conto di quanto detto al punto precedente, si ha anzitutto
che (j = 1, ... , q)
{ }λ h y(2) h , j ≤ maxi y(1) h , i ⇒ { }λ h maxj y(2) h , j ≤ maxi y(1) h , i
⇒ { }λ h maxj y(2) h , j ≤ λ h maxi y(1) h , i
e (i = 1, ... , p)
{ }λ h y(1) h , i ≤ maxj y(2) h , j ⇒ { }λ h maxi y(1) h , i ≤ maxj y(2) h , j .
Pertanto,
λ h maxj y(2) h , j ≤ λ h maxi y(1) h , i ≤ maxj y(2) h , j
e, quindi, λ h ≤ 1.
6.2 LA RAPPRESENTAZIONE GRAFICA SIMULTANEA USUALE
La rappresentazione grafica simultanea usuale consiste nel sovrapporre
le rappresentazioni ottenute separatamente per i profili riga e colonna.
Supposto, per esempio, di aver rappresentato i profili riga mediante le
loro proiezioni ortogonali (punti immagine) nel sottospazio generato dal
vettore c (1) 1 (asse principale) e i profili colonna mediante le loro proiezioni
ortogonali (punti immagine) nel sottospazio generato dal vettore c (2) 1 (asse
principale), questo significa portare a coincidere i due assi principali.
ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 35
Ovviamente, la prossimità tra punti immagine di uno stesso insieme,
purché ben rappresentati sul relativo asse principale, è direttamente inter-
pretabile.
Invece, una interpretazione diretta della prossimità tra punti immagine di
insiemi diversi, ancorché ben rappresentati sull'asse principale che loro com-
pete, non è possibile, in quanto si tratta di oggetti appartenenti a spazi
euclidei differenti.
Tuttavia, tenuto conto delle relazioni quasi baricentriche che pongono in
relazione un punto immagine di un insieme con tutti i punti immagine
dell'altro insieme, è possibile arguire che i punti immagine di un insieme più
prossimi a un determinato punto immagine dell'altro insieme sono quelli che
maggiormente contribuiscono a formarne il baricentro (7).
(7) Altri tipi di rappresentazione grafica simultanea saranno esaminati in un lavoro successivo,dedicato a una esposizione della tecnica del biplot.
36 RENATO LEONI
RIFERIMENTI BIBLIOGRAFICI
[1] Bolasco, S., Analisi multidimensionale dei dati, Carocci, Roma,
1999.
[2] Bertier, P., Bouroche, J.M., Analyse des données multidimension-
nelles, PUF, Paris, 1977.
[3] Bouroche, J.M., Saporta, G., L'analisi dei dati, CLU, Napoli, 1983.
[4] Cailliez, F., Pages, G.P., Introduction à l'analyse des données,
Smash, Paris, 1976.
[5] Coppi, R., Appunti di statistica metodologica: analisi lineare dei
dati, Dipartimento di Statistica, Probabilità e Statistiche Applicate,
Roma, 1986.
[6] Delvecchio, F., Analisi statistica di dati multidimensionali, Cacuc-
ci Editore, Bari, 1992.
[7] Diday, E., Lemaire, J., Pouget, J., Testu, F., Eléments d'analyse
des données, Dunod, Paris, 1982.
[8] Escofier, B., Pagès, J., Analyse factorielles simples et multiples,
Dunod, Paris, 1990.
[9] Fabbris, L., Analisi esplorativa di dati multidimensionali, cleup
editore, Padova, 1990.
[10] Greenacre, M.J., Theory and Applications of Correspondence
Analysis, Academic Press, London, 1984.
[11] Greenacre, M.J., Hastie, T., The Geometric Interpretation of
Correspondence Analysis, JASA, 1987.
[12] Lebart, L., Morineau, A., Warwick, K.M., Multivariate Descriptive
Analysis, John Wiley and Sons, New York, 1984.
[13] Leoni, R., Indici di associazione per tabelle di contingenza doppia
e tripla, Dipartimento Statistico, Firenze, 1980.

ANALISI SEMPLICE DELLE CORRISPONDENZE (Parte prima) 37
[14] Leoni, R., Algebra lineare per le applicazioni statistiche,
Dipartimento di Statistica "G. Parenti", Firenze, 2007 (sta in
<http://www.ds.unifi.it> alla voce Materiale Didattico).
[15] Leoni, R., Principal Component Analysis, Department of Statistics,
"G. Parenti", Florence, 2007.
[16] Marchetti, G., Analisi in componenti principali e approssimazioni
di matrici, Dipartimento Statistico, Firenze, 1984.
[17] Rizzi, A., Analisi dei dati, NIS, Roma, 1985.
[18] Saporta, G., Probabilités, Analyse des données et Statistique, E di-
tions Technip, Paris, 1990.
[19] Volle, M., Analyse des données, Economica, Paris, 1981.