
Remote Object Query for Ad-hoc Computing Environment
22
Remote Object Query for Ad-hoc Computing Environment CS851 Biologically Inspired Computing Presented By Qing Cao Computer Science Department UVA April 2003
description
Remote Object Query for Ad-hoc Computing Environment. CS851 Biologically Inspired Computing Presented By Qing Cao Computer Science Department UVA April 2003. Smart Sensor Node. Smart Sensor Node. Smart Sensor Node. Smart Sensor Node. Smart Sensor Node. - PowerPoint PPT Presentation
Transcript of Remote Object Query for Ad-hoc Computing Environment

Remote Object Query for Ad-hoc Computing Environment
CS851 Biologically Inspired Computing
Presented By Qing Cao
Computer Science Department UVA
April 2003
Background & Motivation
Large Ad-hoc Computing Environment such as Sensor Network, etc, has to be effectively controlled.
Challenge: How to know where are the Targets and Control them?
SmartSensorNode
SmartSensorNode
SmartSensorNode
TargetSmartSensorNode
SmartSensorNode
Target
Target

Overview of this research work
A quantitative approach and analysis of the design and deployment of sensor network, with Guiding Parameters and Results.
A novel, biologically inspired control mechanism for sensor networks event query based on the results.
Result: A service-client Control structure for Sensor networks, especially suitable for security. Research results have been simulated and evaluated and a prototype will be implemented on MICA2 motes.

Story Begins:
You are a tourist. You are now in a forest. Now the forest is caught on FIRE!
So what kinds of tools can you use to escape? Helicopters? Call for help? (cell phone) And now , A single mote.

The complete Scenario
The forest can be monitored. The motes detect fire and deposit results. The mote in your hand is used to retrieve
the results. You use the results to find path out
of the forest.
Main Challenge:
The query of the event in the network. Problem: How to find the position of the
events in a real time manner?

Inspiration from the biological world
Termites send out pheromone to notify other termites of its current location.
Such information is sent uniformly.
Directed Information Sending might help.

Inspiration from the biological world
Animals leave trails as the presence of
themselves, such as bees or mice.
Can we import this idea in large colony of
computing units?

My Method of such simulation
FireInformation
V ArmBasic Info.
FireInformation
V ArmBasic Info.
H ArmLocation
Time Type Basic Info.
FireInformation
H ArmBasic Info.
No Sensor
H ArmLocation
Time Type Basic Info.
H ArmLocation
Time Type Basic Info.
H ArmLocation
Time Type Basic Info.
H ArmLocation
Time Type Basic Info.
H Arm
FireInformation
V ArmBasic Info.
FireInformation
V ArmBasic Info.
FireInformation
V ArmBasic Info.
No Sensor
H ArmLocation
Time Type Basic Info.
No Sensor
H ArmLocation
Time Type Basic Info.Intersect
H ArmLocation
Time Type Basic Info.
No Sensor
No Sensor
FireInformation
V ArmBasic Info.
FireInformation
V ArmBasic Info.
FireInformation
V ArmBasic Info.Intersect!
No Sensor
No Sensor
No Sensor
QueryStation
Fire!Time, Type,Location, etc
FireInformation
Context GridV Arm
Basic Info.
No Sensor
H Arm
H ArmLocation
Time Type Basic Info.
FireInformation
V ArmBasic Info.
FireInformation
V ArmBasic Info.
H ArmLocation
Time Type Basic Info.

Idea
Assumption: The communication range is larger than sensing range.
How this idea works… Two different Algorithms.
Single Node Relay.
Lower possibility, less messages
Multiple Node Relay
Higher possibility, more messages

Simulation Results
The density of motes to ensure coverage
Comm Range Percentage Eff ect
0
0. 1
0. 2
0. 3
0. 4
0. 5
0. 6
0. 7
0. 8
0. 9
1
10 50 90 130 170 210 250 290 330 370 410 450 490 530 570 610
Number of nodes
Possibility of Full Coverage
Comm 0. 1 Comm 0. 25 Comm 0. 15

Simulation Results
Conclusion :Communication range percentage is the only reason that determines how many nodes we need.
Nodes Vs Percentage
3150
2100
1450
1000750 600 500 410 390 280 270 230 200 190 170 160 125 120 110 100 85
0
500
1000
1500
2000
2500
3000
3500
0. 05 0. 06 0. 07 0. 08 0. 09 0. 1 0. 11 0. 12 0. 13 0. 14 0. 15 0. 16 0. 17 0. 18 0. 19 0. 2 0. 21 0. 22 0. 23 0. 24 0. 25
Range Percentage
Number of Nodes
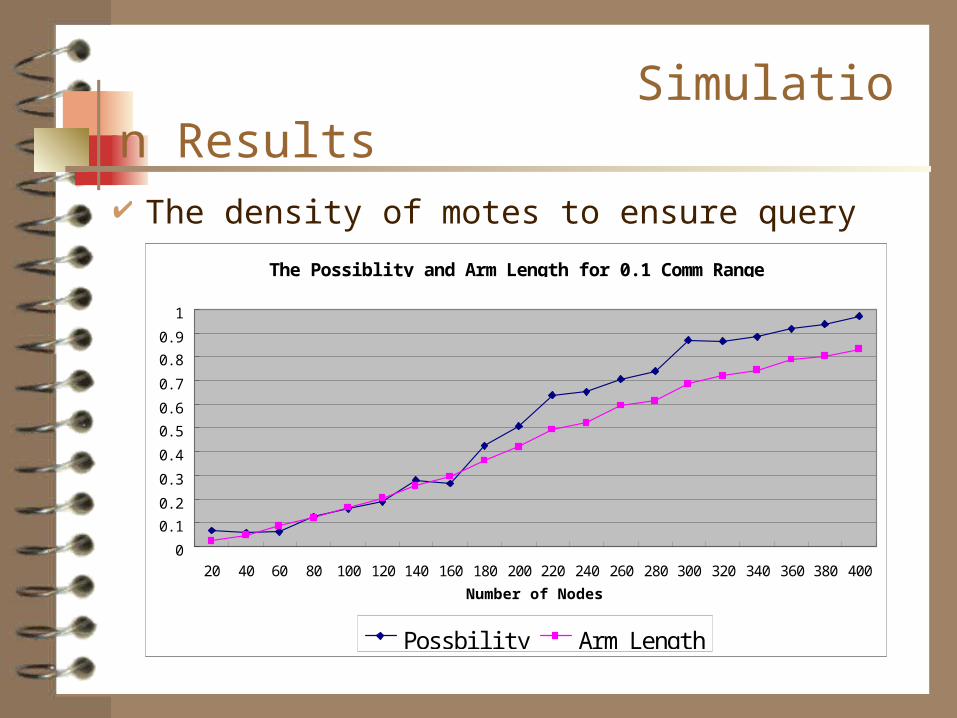
Simulation Results
The density of motes to ensure queryThe Possi bl i ty and Arm Length for 0. 1 Comm Range
0
0. 1
0. 2
0. 3
0. 4
0. 5
0. 6
0. 7
0. 8
0. 9
1
20 40 60 80 100 120 140 160 180 200 220 240 260 280 300 320 340 360 380 400
Number of Nodes
Possbi l i ty Arm Length

Simulation Results
The density of motes to ensure query (cont.)
The eff ect of the comm range
- 0. 1
0. 1
0. 3
0. 5
0. 7
0. 9
1. 1
10 28 46 64 82 100 118 136 154 172 190 208 226 244 262 280 298 316 334 352 370 388 406
Number of Nodes
Possiblity
0. 25 0. 15 0. 1

Simulation Results
The effect of Arm Width
The eff ect of Arm wi dth
00. 10. 20. 30. 40. 50. 60. 70. 80. 9
1
10 34 58 82 106 130 154 178 202 226 250 274 298 322 346 370 394 418 442 466 490 514 538 562 586
Node Number
0. 33 0. 5 1

So how do motes intersect with each other?
Lemma: If a query arm meets with a service arm and both arms keep unbroken, then at least one node in the query arm is bound to be able to communicate with at least one node in the service arm. (Proof omitted here)
As a result of this lemma, there are two kinds of intersections:
Direct Intersection and Indirect Intersection

Direct Vs Indirect
0
0. 1
0. 2
0. 3
0. 4
0. 5
0. 6
0. 7
0. 8
0. 9
1
10 43 76 109 142 175 208 241 274 307 340 373 406 439 472 505 538 571 604 637
Di rect I ndi rect

System Overview
Client Node
Client Node
Buildup of theservice arms in
advanceClient Node
SensorNetworkServiceLayer
Request andReceive
UserSecurity
Query Armsetup
everytime

System Advantages
This is a secure system
Since C/S Architecture is used, the user
must be authenticated to use the service.
Traditional Security methods, such as
RSA can be used to defeat any possible
attack.

System Advantages
The structure is simple. It is application independent. It provides basic functions ,
such as query, count, etc, inherently.
Now how you escape from the forest?
You have a mote with your user private key. You send out the message which requests current
fire locations. Your request is authenticated by the sensor
network, which is nearby, but you don’t need to know where they are.
The sensor system now monitoring the forest gives you the fire information.
The information is displayed on your PDA. RUN, FOREST, RUN! … from the movie Forrest Gump
End of Show For CS851 University of Virginia
Qing Cao Presents


















