RealTime Ethernet

of 20
Transcript of RealTime Ethernet
-
8/13/2019 RealTime Ethernet
1/20
[3 pages
3096 words]
Introduction
Real-time electronic distributed control systems are an important development of the
technological evolution. Electronics are employed to control and monitor the most safety-critical
applications from flight decks to hospital operating rooms. As these real-time systems become
increasingly prevalent and advanced, so does the demand to physically distribute the control instrict real-time. Thus there is a need for control network protocols that can support the
application's stringent real-time requirements. Real-time networks must provide a guarantee of
service so that they will consistently operate deterministically and correctly.
Ethernet, as defined in IEEE 802.3, is non-deterministic and thus it is unsuitable for hard real-
time applications. The media access control protocol, CSMA/CD with its truncated binaryexponential backoff algorithm, does not allow the network to support hard real-time
communication as it incorporates random delays and allows for the possibility of transmission
failure.
Decreasing costs and increasing demand for a single network type, from boardroom to plant-
floor, have led to the development of Industrial Ethernet. The desire to incorporate a real-time
element into this increasingly popular single-network solution has led to the development ofdifferent real-time Industrial Ethernet solutions. Fieldbus networking standards have failed to
deliver an integrated solution. Typically the emerging real-time Industrial Ethernet solutions
complement the fieldbus standards, for example by using common user layers. This course
covers an introduction to real-time systems along with a study of Ethernet with emphasis on itssuitability as a real-time network. Module 402 provides a study of the real-time Industrial
Ethernet solutions available today.
Real-Time Introduction
Real-Time (RT) systems are becoming increasingly important, as industries focus on distributed
computing in automation, see Figure 1. As computing costs decrease, and computing power
increases, industry has become more dependent on distributed computers to deliver efficiencyand increased yield to the production lines. Real-Time does not automatically mean faster
execution but rather that a process is dependent on the progression of time for valid execution.
-
8/13/2019 RealTime Ethernet
2/20
Figure 1Distributed Real-Time Processing
RT systems are those whose correct execution depends not solely on the logical validity of data
but also on its timeliness. A correct RT system will guarantee the successful operation of a
systemso far as its timely execution is concerned. RT systems are generally broken into twomain sub-categories: hard and soft.
Hard Real-Time (HRT) systems are those in which incorrect operation can lead to catastrophicevents. Errors in HRT systems can cause accidents or even death. Such systems are typically
found in flight control or train control systems, where an error could potentially incur loss of life.
Soft Real-Time (SRT) systems, on the other hand, are not as brittle. An error in a SRT system,while not encouraged or appreciated, will not cause loss of property or life. SRT systems are not
as safety-critical as HRT systems, and should not be employed in a safety-critical situation.
Examples of SRT systems would be online reservation systems, or streaming multimediaapplications where slight occasional delays might cause small inconvenience but will not have
serious impact.
Jobs are the real-time system's building blocks. Each real-time job has certain temporalquantities (Figure 2) associated with them:
1. Release Time,
2. Ready Time,
3. ExecutionTime,
4. ResponseTime,
5. Deadline.
-
8/13/2019 RealTime Ethernet
3/20
Figure 2
The Release Time of a job is when the job becomes available to the system. The ExecutionTime is the time it takes for a job to be completely processed. The Response Time is the interval
between the release time and the completion of the execution. The Ready Time is the earliest
time the job can start executing (always greater or equal to the Release Time). The Deadline isthe time by which execution must be finished. If execution is not complete by the deadline, the
job is late. A job's deadline can be either hard or soft, indicating the job's temporal dependence.
As mentioned earlier, a missed hard deadline can have serious consequences for correct systemoperation. All real time systems have a certain level of jitter. Jitter is a variance on the actual
timing of the above times. In a real-time system, jitter should be measurable within a +/interval
so that the system performance can still be guaranteed. For textbook information on real-time
systems, refer to [1].
To develop a real-time distributed system, where computers are interconnected, it is vital to
employ a network that can provide communication between the various distributed computers in
a reliable and timely fashion. Distributed processors running real-time applications must be ableto inter-communicate via a real-time protocol, otherwise the temporal quality of their work is
lost. Real-Time Communication networks are like any real-time system. They can be hard or
soft, depending on the system requirements and their 'jobs' include message transmission,propagation, and reception. There are a number of real-time control networks available and
employed in industry, but none have the popularity or bandwidth capabilities of Ethernet. In the
following section, we will discuss the demand for a real-time Ethernet solution.
The Demand for Real-Time Ethernet
The demand for Ethernet as a real-time control network is increasing (see Figure 3) as manufacturersrealise the benefits of employing a single network technology from the boardroom to the plant floor.
Decreased product costs coupled with the possibility of overlapping training and maintenance costs forinformation, field level, control and possibly device networks would greatly reduce the expense to themanufacturers.
Figure 3Predicted Sales of Industrial Ethernet nodes
Ethernet offers many benefits at the real-time control level over existing solutions. As a control network,10 Gbps Ethernet offers bandwidth that is almost 1000x faster than today's comparable fieldbus networks
-
8/13/2019 RealTime Ethernet
4/20
(such as the 12 kbps of PROFIbus) and can also support real-time communication. Distributedapplications in control environments require tight synchronisation so that the delivery of control messagescan be guaranteed within defined message cycle times. Typical cycle times for control applications arelisted in Table 1. Traditional Ethernet and fieldbus systems are not capable of meeting cycle timerequirements below a few milliseconds, but the emerging real-time Industrial Ethernet solutions allowcycle times as low as a few microseconds.
Typical Cycle Times for Control Applications
Control Application Typical Cycle Time
Low speed sensors (e.g. temp. pressure) Tens of milliseconds
Drive control systems Milliseconds
Motion control (e.g. robotics) Hundreds of microseconds
Precision motion control Tens of microseconds
High speed devices Microseconds
Electronic ranging (e.g. fault detection) Hundreds of nanoseconds
Table 1
Along with the increased bandwidth and tight synchronisation, real-time Ethernet gives manufacturers thesecurity of using a physical and data-link layer technology that has been standardised by both the IEEEand the ISO. Ethernet can provide reduced complexity with all the attributes required of a field, control ordevice network - in operations having up to 30 different networks installed at this level [2]. Furthermore,Ethernet devices can also support TCP/IP stacks so that Ethernet can easily gate to the Internet. Thisfeature is attractive to users since it allows remote diagnostics, control, and observation of their plantnetwork from any Internet-connected device around the world with a license-free web browser. AlthoughEthernet does introduce overhead through its minimum message data size (46 bytes), which is large incomparison to existing control network standards, its increased bandwidth, standardisation andintegration with existing plant technology should generate good reasons to consider Ethernet as a control
network solution.
Ethernet and CSMA/CD
Ethernet, as defined in IEEE 802.3, is unsuitable for strict real-time industrial applications because itscommunication is non-deterministic. This is due to the definition of the network's media access control(MAC) protocol, which is based on Carrier Sense Multiple Access/ Collision Detection (CSMA/CD), seeFigure 4. The implementation described in the standard uses a truncated binary exponential backoffalgorithm.
-
8/13/2019 RealTime Ethernet
5/20
Figure 4IEEE 802.3 CSMA/CD withTruncated Binary Exponential Algorithm Flow Chart
With CSMA/CD, each node can detect if another node is transmitting on the medium (Carrier Sense).When a node's Carrier Sense is on, it will defer transmission until it determines that the medium is free. Iftwo nodes transmit simultaneously (Multiple Access), the network experiences a collision and all framesare destroyed. Nodes can detect collisions (Collision Detection) by monitoring the collisionDetect signal
provided by the physical layer. When a collision occurs, the node transmits a jam sequence.
When a node begins transmission on the medium there is a certain time interval, called the CollisionWindow, during which a collision can occur. This window is large enough to allow the signal to propagatearound the entire network/segment. When this time window is over, all (functioning) nodes should havetheir Carrier Sense on, and so would not attempt to commence transmission.
When a collision occurs, the truncated binary exponential backoff algorithm is employed at each 'colliding'node. The algorithm works as follows:
-
8/13/2019 RealTime Ethernet
6/20
Initially: n:=0, k:=0, r:=0.
When a collision occurs, the node enters the algorithm:
It increments n, the Transmit Counter, which counts the number of sequential collisions experiencedby a node.
If n> 16, (16 unsuccessful successive transmission attempts), transmission fails and the higherlayers should be informed.If n
-
8/13/2019 RealTime Ethernet
7/20
Figure 5Half-Duplex vs. Full-Duplex
Since full duplex links can host a maximum of two nodes per link, such technology is not viable as anindustrial real-time solution without the use of fast, intelligent switches capable of connectinglinks/segments as a network with single collision domains for each node i.e. Switched Ethernet.
Full Duplex, Switched Ethernet
With shared Ethernet, nodes compete for access to the media in their shared collision domains. The useof a destructive non-deterministic bus access scheme, such as CSMA/CD, makes shared Ethernetunviable as a real-time network solution. The most popular method of collision-avoidance, whichproduces a deterministic Ethernet, is to introduce single collision domains for each node because thisguarantees the node exclusive use of the medium, thereby eliminating access contention. This isachieved by implementing full duplex links as well as hardware devices such as switches and bridges.These devices have the ability to isolate collision domains through the segmentation of the networkbecause each device port is configured as a single collision domain, see Figure 6. Although, bothswitches and bridges can provide this segmentation, switches are more flexible because they can caterfor more segments.
Switches
Switches are data-link layer hardware devices that enable the creation of single-collision domains throughnetwork segmentation. While a bridge operates like a switch, it only contains two ports. In contrast,switches contain more than two ports, where each port is connected to a segment (collision domain).Switches can operate in half duplex or full duplex mode. When full duplex switches are used along withfull duplex capable nodes, there will be no collisions on any segment. Today's switches are moreintelligent and faster than previously and with careful design and implementation could be used toachieve a hard real-time communication network using IEEE 802.3.
-
8/13/2019 RealTime Ethernet
8/20
Figure 6Switched Full Duplex vs. Shared Ethernet
Although switches are data-link layer devices, today's switches are also capable of performing switchingfunctions based on data from layers 3 and 4. Layer 3 switches can operate on information provided by IPsuch as IP version, source/destination address or type of service. Layer 4 devices can switchdepending on the source/destination port or even information from the higher-level application.
Further refinements to the IEEE 802 standards, specifically for switch operations, are 802.1p and802.1Q. IEEE 802.1p, which was incorporated into the IEEE 802.1D [3] standard brings Quality ofService (QoS) to the MAC level and also defines how these switches should deal with prioritisation -priority determination, queue management etc. This is achieved through the introduction of a 3-bit priorityfield into the MAC header, which gives 8 (07) different priority levels decoded and upheld by switches orhubs. As defined, 802.1p can support priorities on topologies that are compatible with its prioritisationservice, but to implement prioritisation on Ethernet, which does not include a prioritisation field in its frameformat, it uses 802.1Q.
IEEE 802.1Q[4] defines an architecture for virtual bridged LANs, the services provided in virtual bridgedLANs, and the protocols and algorithms involved in the provision of those services. 802.1Q allowsEthernet frames to support VLANs (Virtual Local Area Networks) limiting broadcast domains and thereby
reducing broadcast traffic on the entire LAN. This is achieved by the insertion of 4 bytes between thesource address field and the length/type field in the Ethernet frame's header, which among otheridentifiers, includes the identifier of the originating VLAN. Also included is a 3-bit prioritisation fieldrequired for 802.1p to implement prioritisation on Ethernet, see Figure 7.
-
8/13/2019 RealTime Ethernet
9/20
Figure 7Extended Frame Format for IEEE 802.1Q
For a real-time Industrial Ethernet application, an 802.1p/Q implementation has certain advantages: itintroduces standardised prioritisation on Ethernet, allowing control engineers to implement up to eight
different user-defined priority levels for their traffic. But these standards also have drawbacks includingthe extra hardware costs associated with the increased Ethernet frame length (1522 bytes), whichintroduces compatibility issues with legacy Ethernet networks. A real-time implementation using 802.1p/Q would require full duplex, switched Ethernet. IEEE 802.1p/Q are acceptable for certain applications ofreal-time Ethernet in industry when switch 'through' time is predictable and an overload situation will notresult in hard deadlines being missed.
Although switches can certainly provide real-time deterministic communication on Ethernet and are thebackbone of the Industrial Ethernet solutions available today, they have drawbacks. They are costly amajor influence on cost-conscious industries. They are powered devices capable of failure (an influentialmajor factor for hard real-time control operations). And sometimes the operational predictability is notguaranteed by the manufacturer. A study on switches for real-time applications is available at [5].
TCP/UDP/IP for Real-Time Ethernet
With industrial Ethernet, the trend is to define an application layer environment along with the TCP/IPprotocol, to realise an industrial automation networking solution. Although some real-time Ethernetsolutions e.g. EtherNet/IP perform all their communication, real-time included, through the TCP/UDP/IPstack, most solutions although they provide compatibility with TCP/IP, do not employ this protocol for real-time communication. In a system like EtherNet/IP, TCP is used for initialisation and configuration (explicit)messages while UDP, with its reduced overhead, is used for real-time I/O (implicit messaging).
Typically, for real-time Industrial Ethernet applications it is sufficient that the solution be compatible withTCP/IP and the protocol suite is bypassed for all real-time communication. The ability of a real-timeEthernet solution to intercommunicate with an office-based system is paramount to achieve the Ethernet-technology plant of the future.
Conclusion
This module has covered a broad introduction to Ethernet for real-time. It has described concepts that willbe developed upon in the follow-up module: Real-Time Ethernet II. The follow-up module will providedetail on existing real-time Ethernet solutions such as PROFInet V3, ETHERNET Powerlink andEtherNet/IP along with an important supporting technology for clock synchronisation: IEEE 1588.
-
8/13/2019 RealTime Ethernet
10/20
References
[1] Liu, J. Real-time Systems; Prentice Hall Inc., 2000; ISBN: 0130996513.
[2] Crockett, N. "Industrial Ethernet is ready to revolutionise the factory Connecting the factoryfloor", Manufacturing Engineer, Volume: 82, Issue: 3, June 2003, pages 4144.
[3] ISO/IEC 15802-3: 1998, ANSI/IEEE Std 802.1D, 1998 Edition. Information technology telecommunications and information exchange between systems local and metropolitan area networkscommon specifications. Part 3: Media Access Control (MAC) bridges.
[4] IEEE Std 802.1Q-1998 IEEE standards for local and metropolitan area networks Virtual bridged localarea networks.
[5] Georges, J.-P.; Rondeau, E.; Divoux, T "Evaluation of switched Ethernet in an industrial context byusing the Network Calculus", Factory Communication Systems, 2002. 4th IEEE International Workshopon 2830 Aug. 2002, pages 1926.
[ 6 pages 3,023 words]
INTRODUCTION
In "Real-Time Ethernet I," Module 401, we introduced the basic concepts of Ethernet's capacity todeliver a real-time communication system. "Real-Time Ethernet II," Module 402, introduces some ofthe real-time solutions available to industry today: EtherNet/IP, PROFInet, EtherCAT andETHERNET Powerlink. This module also provides an introduction to a single standard, IEEE 1588,that is growing in popularity amongst real-time Ethernet developers to provide sub-microsecondsynchronization accuracy of distributed clocks over Ethernet. .
-
8/13/2019 RealTime Ethernet
11/20
What is Ethernet/IP?
EtherNet/IP (EIP, where the IP stands for Industrial Protocol) is an open application-layer protocoldeveloped and maintained by CI (ControlNet International), ODVA (Open DeviceNet VendorsAssociation) and IEA (Industrial Ethernet Association). It is built on the existing IEEE 802.3 physical/data
layers and TCP/UDP/IPgiving it optimal interoperability with most information-level networks. EIP offersa real-time (RT) solution when using strict guidelines, but is not deterministic. It uses the open object-oriented CIP (Control and Information Protocol) as its application layerthe same layers 57 as bothDeviceNet and ControlNetyielding full interoperability with them (Figure 1).
Figure 1Ethernet/IP Stack
CIP [1] is a flexible and scalable automation protocol well-suited to distributed systems with propertiessuch as: object-orientation, Electronic Data Sheets and device profiles. EIP with CIP is not an RTprotocol. To achieve RT for EIP, CIPSync (a high-speed CIP synchronization solution) is employed.CIPSync is based on IEEE 1588. Using 100 Mbps Switched Ethernet, CIPSync can deliversynchronization accuracy of better than 500 nanoseconds between devices [2] although jitter introduced
by the protocol stack will still be an issue.
EIP uses both TCP and UDP with IP for communication. When a connection-oriented exchange ispreferred, e.g. at initialization, TCP is used (Explicit Messaging). Explicit Messaging contains protocolinformation and service information but does not have strict timing requirements; therefore, it is sufficientto use the slower, yet guaranteed TCP protocol. For RT traffic, EIP uses the unicast and multicastcapabilities of UDP to implement the producer/consumer model of communicationpopular with controlapplications. Implicit messages contain no commands, only data. The meaning of this data is configuredat initialization, reducing run-time processing in the nodes. [PD1] Typical traffic on an EIP network is
-
8/13/2019 RealTime Ethernet
12/20
cyclic (although CIP also specifies polled, change-of-state and strobed traffic). Network collisions areavoided by switches, and EIP is generally implemented in a star topology.
Unlike other RT solutions, EIP uses UDP/IP for RT communication, adding jitter and non-determinism. Ifthis jitter is quantifiable and does not infract on the system model, the system can still be RT but will beunsuitable for fast and hard RT systems like motion control. Specific advice relating to implementing an
RT version of EIP is offered in [3], and although EIP with CIP is not an RT protocol, the currentlyachievable end-to-end response time in an EIP control system of eight producers and one consumer wasdetermined to be 7 mswhen implemented with the recommendations in the following paragraph.
One recommendation in [3] introduces VLANs and locates all devices sharing time-critical data in thesame VLAN so RT multicast EIP traffic will not need to exit the VLAN. Another recommendation is to usethe routing functionality of Layer 3 switches and set the TTL of IP multicasts to 1. This keeps RT EIPtraffic in its subnet and keeps normal traffic out. Hence, according to [3], it is possible to achieve RTperformance between EIP devices (using CIP) if the following guidelines are met:
1. Devices sharing RT information must co-exist in the same subnet.2. The EIP segment must be isolated from the main network multicast traffic.
EIP use of CIP with commercial off-the-shelf components, including TCP/UDP/IP, for all devices willbenefit certain customers while an EIP solution using CIPSync will be more beneficial to those requiringsub-microsecond synchronization accuracy.
EIP can cater for many RT systems where the device count is limited, device synchronization is in theorder of microseconds and determinism is not required.
(No part of this article may be reproduced without the written consent of the Industrial Ethernet University.)
-
8/13/2019 RealTime Ethernet
13/20
EtherCAT
EtherCAT (Ethernet for Control Automation Technology) is the motion-control RT solution from Beckhoff.It can process 1000 I/Os in 30 s [4], but requires full-duplex. It can use copper or fiber-optic cables.EtherCAT is based on the master/slave principal and can interoperate with normal TCP/IP-based
networks and other Ethernet-based solutions such as EIP or PROFInet. It also supports any Ethernettopology, including the bus.
The EtherCAT master processes RT data via dedicated hardware and software (Beckhoff currently usetheir PC-based TwinCAT OS and TwinCAT Y driver). In the future, further variations will be introducedthat will also provide the same guarantees. The master prioritizes EtherCAT frames over normal Ethernettraffic, which is transmitted in gaps. The master controls traffic by initiating all transmissions.
The telegrams are standard Ethernet, and the data field encapsulates the EtherCAT frame (an EtherCATheader and one or more EtherCAT commands). Each command contains a header, data and WorkingCounter (WC) field. Each Ethernet telegram can contain many EtherCAT commandsrealizing a higherbandwidth and more efficient use of the large Ethernet data field size and header (see Figure 2). Thestandard Ethernet CRC is used to verify message correctness.
Figure 2EtherCAT Encapsulation
The EtherCAT master fully controls its slaves. Its commands only elicit responses; slaves do not initiatetransmissions. The two EtherCAT communication methods used are "Ether Type" or UDP/IPencapsulation.
The "Ether Type" uses the type field (defined in Ethernet II), which is more commonly known as the lengthfield in IEEE 802.3. The Ether Type implementation does not use IP, thus limiting EtherCAT traffic to the
originating subnet. Encapsulating commands using UDP/IP allows EtherCAT frames to traverse subnets,but has drawbacks. The UDP/IP header adds 28 (20: IP, 8: UDP) bytes to the Ethernet frame andundermines RT performance through its non-deterministic stack.
EtherCAT slaves range from intelligent nodes to 2-bit I/O modules and are networked via 100Base-TX,fibre optic cable or E-bus (depending on distance requirements). E-bus is an EtherCAT physical layer forEthernet offering a LVDS (Low Voltage Differential Signal) scheme. Slaves are hot pluggable in anytopology of branches or stubs. Multiple "slave rings" can exist on a single network if connected by aswitch, (see Figure 3).
-
8/13/2019 RealTime Ethernet
14/20
Figure 3Sample EtherCAT Implementation
EtherCAT slaves have integrated memory from 2 bits to 64 Kbytes. They appear to the Ethernet as asingle device though actually comprising up to 65,535 devices. They are configured in an open-ringtopology, with the Ethernet interface at the open end. Masters transmit commands to the MAC address ofthe first device. When the signal reaches the Ethernet/slave interface, it is converted to E-bus
specifications (if E-bus is employed) and forwarded.
A slave receives a telegram, processes it (in hardware) then forwards it to the next slave on the ring. Thisprocessing delays the telegram by an order of nanoseconds. The last slave returns the completedtelegram, via the ring, to the master. On the return route, each slave amplifies and regenerates the signal.Each slave has two Tx & Rx interfaces, so bi- directional communication occurs without contention.
In each EtherCAT command, the WC increments when a slave processes a command addressed to it,allowing the master to determine if each addressed slave is exchanging data, although correct data is notguaranteed.
The FMMU (Field Memory Management Unit) of each configurable slave converts a logical address to a
physical one, and that information is available to the master at initialisation. Thus, each slave needs aspecial ASIC (Application-Specific Integrated Circuit). On telegram reception, a slave determines if it isaddressed, and then passes data to/from the telegram, incurring a delay of some nanoseconds.EtherCAT is also internally synchronized by a distributed clock algorithm (a simplified version of IEEE1588) although external synchronization is achievable with IEEE 1588.
EtherCAT is a fast RT Ethernet solution and deterministic if not used with UDP/IP or intermediateswitches or routers between master and slaves.
-
8/13/2019 RealTime Ethernet
15/20
ETHERNET Powerlink (EPL)
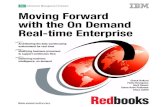
EPL is a hard RT protocol based on Fast Ethernet. Like EtherCAT, it uses the Ethernet II Frame typefield. EPL devices use standard Ethernet hardware with no special ASICs. EPL can deliver a cycle time of200 s with jitter under 1 s. Its frame is encapsulated as illustrated in Figure 4.
Figure 4Powerlink Encapsulation
EPL uses cyclic communication with time-slot division and the master/slave model. One master(manager) is allowed per network. The master schedules all transmissions and is the only active stationslaves transmitting on request.
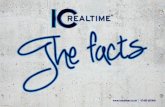
The four EPL cycle subdivisions are illustrated in Figure 5.
Figure 5Powerlink Cycle
During the Start Period, the EPL master broadcasts the "Start-of-Cyclic" (SoC) frame which synchronizesthe slaves. The timing of this frame provides the only time base for the network synchronisation: all otherframes are purely event-driven.
After transmitting the SoC frame, the Cyclic Period occurs as the manager polls each station with a "PollRequest" frame. Only then does the slave respond with a "Poll Response" frame containing datahence,
collisions are avoided. The slave broadcasts its response to all devicesthus, inter-slave communicationcan occur.
After successful polling of all slaves, the master broadcasts the "End-of-Cyclic" (EoC) frame, informingeach slave that the cyclic traffic progressed correctly.
The Asynchronous Period allows non- cyclic data transfers under master control. To transmit during thisperiod, a slave must have informed the master in its "Poll Response" during the Cyclic Period. The master
-
8/13/2019 RealTime Ethernet
16/20
builds a list of waiting slaves and employs a scheduler to guarantee that no send request will be delayedindefinitely. During the Asynchronous Period, standard IP datagrams can be transferred.
Unlike PROFInet, EPL does not employ switches to avoid collisions or to provide the networksynchronization; the master controls this. EPL networks can be built with standard hubs, and it isproposed that each device incorporate a hub for ease of bus implementation. Switches, although not
prohibited, are not recommended for EPL because they add jitter and reduce determinism. Since the EPLnetwork avoids collisions via time-controlled bus access, up to 10 hubs can be cascaded (an allowableexception to the 5-4-3 Ethernet rule).
Currently, EPL devices demanding RT communication cannot co-exist on the same segment as non-RTEthernet devices. However, EPL devices can operate as normal Ethernet devices. In Protected Mode, theRT segment must be separated from normal traffic by a bridge or router. In Open Mode, RT traffic sharesthe segment with normal traffic, but RT communication is compromised. In the next Powerlink version(V3), IEEE 1588 will be used to synchronize traffic across multiple RT segmentsproviding a moredistributed EPL implementation, but true RT segments will still contain only EPL devices. UnlikePROFInet where normal Ethernet and RT devices can co-exist and not affect RT traffic, EPL must beprotected from non-RT communication through bridges or routers. Unlike PROFInet or EtherCAT, whichneed special ASICs, EPL employs standard Ethernet hardware.
PROFInet
PROFInet is a plant-wide fieldbus standard for distributed automation systems. It uses object-orientationand available IT standards (TCP/IP, Ethernet, XML, COM). PROFInet is also built on IEEE 802.3 and isinteroperable with TCP/IPallowing it to be implemented on existing Ethernets. It is compatible withPROFIBUS-DP.
PROFInet V1, has a response time of 10-100 ms. PROFInet-SRT (Soft Real-Time) allowed PROFInet towork with a factory automation cycle time of 5-10 ms, achieving RT solely in software. It uses TCP/IP anda dedicated software channel for RT communications. PROFInet-IRT brings a hard-RT element to thePROFInet protocols. The three PROFInet protocols allow differing degrees of RT. PROFInet for hard RTis PROFInet-IRT.
PROFInet-IRT
PROFInet IRT (Isochronous RT) was developed for systems requiring sub-microsecond synchronization,typically high- performance motion control systems. The benchmark for such a system is 1 ms cycle time,1 s jitter accuracy, and guaranteed determinism [6]which IRT fulfils.
Since software introduces jitter above 1 s, IRT (unlike SRT) is a hardware solution with highlysynchronized Ethernet nodes. Using full-duplex switched Fast Ethernet, it divides the communicationcycle into a standard TCP/IP open channel and a deterministic RT channel (see Figure 6). The channelratio is system-dependent and is chosen by the system engineer.
-
8/13/2019 RealTime Ethernet
17/20
Figure 6PROFInet-IRT Channel Division
Each PROFInet-IRT device has a special ASIC for handling node synchronisation and cycle subdivisionand incorporates an intelligent 2- or 4-port switch.
The PROFInet switch in every node is highly synchronized, contains a schedule of bus access and candeal with RT and non-RT traffic. It prioritizes RT traffic and provides full-duplex links for all ports.Contemporary switches (even cut-through) add jitter that would impact on determinism. PROFInetswitches minimize jitter to where it has a negligible effect. The PROFInet communication model allowsboth RT and non-RT traffic to co-exist on one network without additional precautions.
By 2005, PROFInet-IRT and SRT will incorporate PROFISafe, the PROFIbus safety solution formanufacturing and processing industries.
PROFInet, of all the solutions discussed here, offers the greatest determinismand since this is built intothe PROFInet-IRT device, the systems engineer is spared from the burden of configuration to guaranteeRT communication.
IEEE 1588
IEEE 1588 [7] specifies "A protocol to synchronize independent clocks running on separate nodes of adistributed measurement or control system to a high accuracy and precision". IEEE 1588 is, or will be,incorporated into EIP, EPL, EtherCAT and PROFInetmaking it a popular standard for delivering RTover Ethernet.
In IEEE 1588, all network nodes down to the transducer level contain an IEEE 1588 clock, synchronizedwith all network peers (see Figure 7) using Precision Time Protocol (PTP). At device level, sensors cantimestamp their data locally and actuators can operate at a precise time, avoiding stack and applicationdelays between transducer and controller. The accuracy of the system depends on the synchronization oflocal RT clocks.
-
8/13/2019 RealTime Ethernet
18/20
Figure 7
IEEE 1588 Configuration
IEEE 1588 defines two separate types of clocks: ordinary and boundary. Boundary clocks (BC) areemployed in devices such as hubs or switcheswhere more than one PTP communication path (port)exists. Ordinary clocks exist in devices having a single porte.g., normal network devices. Each BC portcan act as a master or ordinary clock in its own segment.
PTP is for networks that support multicasting but keep multicasts within a subnet and where each localclock fulfils exacting requirements. The grandmaster clock (GMC) is the best clock in the systemwiththe best inherent stability, accuracy, resolution, etc. defined by the standard [8]. The Best Master ClockAlgorithm (BMC), run by every live node, determines clock quality. Within each subnet, the BMCdetermines the master clock; in a single- subnet system the master is the GMC.
The GMC determines system synchronization; system clocks synchronize their subnet clocks to thesystem. There is only one GMC per system, and only one master clock per subnet.
IEEE 1588 (continued)
Synchronization is performed as follows. All masters periodically broadcast "Sync" messages containingan estimate of the time the message will physically leave the master. The precise receipt time of thesemessages is noted at the slaves. The precise sending time of the message is noted at the grandmaster.
-
8/13/2019 RealTime Ethernet
19/20
All precise timing measurements are performed as close to the physical layer as possibleto eliminatethe delays from the network stack and operating system while the estimated times are calculated by theIEEE 1588 code at the Application Layer (see Figure 8). Following the Sync message, the mastertransmits a related "Follow_Up" message containing the precise sending time of the Sync message. Aslave uses the transmission and reception times to calculate its offset and can initiate synchronizationwith the delay measurement, which is not periodic and not performed as often as the protocolsynchronization. Sync messages do not propagate beyond their originating subnet.
Figure 8IEEE 1588 Node Timing
The resolution of the system clock is the resolution of the GMC. If required, the GMC can besynchronized to an external source such as GPS.
IEEE 1588 is a highly precise system for synchronizing distributed nodes for applications such as motioncontrol and robotics. It was designed for multicasting networks but with the popularity of IndustrialEthernet, Annex D was included for an Ethernet implementation of PTP. Although IEEE 1588 does notalter Ethernet or make it more deterministic or reliable, it does provide a method for other protocols to doso. A highly synchronized system of distributed nodescoupled with an application for handlingresolution and controlling trafficcould deliver hard, deterministic RT over Ethernet.
Real-Time Ethernet is a fast- growing, exciting development of the Ethernet protocol. The ability to haveRT control segments running on the same network as office applications brings many new possibilities for
industrial applications. With different protocols offering different levels of RT service, it is vital tounderstand the RT requirement of the system before choosing a solution. Sub-microsecondsynchronization accuracy, with IEEE 1588, along with an RT protocol can provide an Ethernet capable ofdelivering hard, fast and deterministic RT for applications such as motion control, while other solutionscater for softer applications. Therefore, when choosing RT-Ethernet, it is vital to consider the real- time,interoperability and flexibility requirements of your system along with all possible solutions before makinga commitment.
-
8/13/2019 RealTime Ethernet
20/20
References
1.Schiffer, V.; "The CIP Family of Fieldbus Protocols and its Newest MemberEthernet/IP," EmergingTechnologies and Factory Automation, 2001. Proceedings. 2001 8th IEEE International Conference on,1518 Oct. 2001, Pages: 377-384 Volume 1.
2."ODVA Adds Time Synchronization Services for Real-Time Control to EtherNet/IP and DeviceNetavailable athttp://www.odva.org/index.htm .
3.Moldovansky, A., "Utilization of Modern Switching Technology in EtherNet/IP Networks," Proc. 1stInternational Workshop on Real-Time LANs in the Internet Age (RTLIA'2002) in conjunction with the 14thEuromicro Conference on Real-Time Systems, Vienna, Austria, June 18, 2002.
4.Beckhoff EtherCAT available atwww.beckhoff.com/english/default.htm?ethercat/default.htm
5.Popp, M.; Wenzel, P. "PROFInet-linking Worlds", Emerging Technologies and Factory Automation,2001. Proceedings. 2001 8th IEEE International Conference, Volume: 2 , 15-18 Oct. 2001, Page(s): 519-
522 Vol.2.
6.Baumann, G. "Solving the Compatible Real-Time Ethernet Conundrum", The OnLine IndustrialEthernet Book, Issue 16, September 2003.
7.IEEE Std. 1588 -2002, "IEEE Standard for a Precision Clock Synchronization Protocol for NetworkedMeasurement and Control Systems."
8.Eidson, J. et al. "Synchronizing Measurement and Control Systems." Sensors, November 2002.
http://www.odva.org/index.htmhttp://www.odva.org/index.htmhttp://www.odva.org/index.htmhttp://www.beckhoff.com/english/default.htm?ethercat/default.htmhttp://www.beckhoff.com/english/default.htm?ethercat/default.htmhttp://www.beckhoff.com/english/default.htm?ethercat/default.htmhttp://www.beckhoff.com/english/default.htm?ethercat/default.htmhttp://www.odva.org/index.htm