
Real-time Scheduling Review Venkita Subramonian [email protected] Research Seminar on Software...
35
Real-time Scheduling Review Venkita Subramonian [email protected] Research Seminar on Software Systems February 2, 2004
-
Upload
horace-rolf-warren -
Category
Documents
-
view
214 -
download
0
Transcript of Real-time Scheduling Review Venkita Subramonian [email protected] Research Seminar on Software...

Real-time Scheduling Review
Venkita Subramonian
Research Seminar on Software Systems
February 2, 2004

Main Topics for Discussion
Single Processor Scheduling
End-to-end Scheduling
Holistic Scheduling

What is a Real-time System?
Real-time systems have been defined as: “those systems in which the correctness of the system depends not only on the logical result of the computation, but also on the time at which the results are produced"; J. Stankovic, "Misconceptions About Real-Time
Computing," IEEE Computer, 21(10), October 1988.
Real-time does not necessarily mean “Real fast”.
Predictability is key in real-time systems
“There was a man who drowned crossing a stream with an average depth of six inches” – J. Stankovic
Real-time Scheduling
Job (Jij): Unit of work, scheduled and executed by system. Jobs repeated at regular or semi-regular intervals modeled as periodic
Task (Ti): Set of related jobs.
Jobs scheduled and allocated resources based on a set of scheduling algorithms and access control protocols.
Scheduler: Module implementing scheduling algorithms
Schedule: assignment of all jobs to available processors, produced by scheduler.
Valid schedule: All jobs meet their deadline
Clock-driven scheduling vs Event(priority)-driven scheduling
Fixed Priority vs Dynamic Priority assignment

Scheduling Periodic Tasks
In hard real-time systems, set of tasks are known apriori
Task Ti is a series of periodic Jobs Jij. Each task has the following parameters
pi - period, minimum interrelease interval between jobs in Task Ti.
ei - maximum execution time for jobs in task Ti.
rij - release time of the jth Job in Task i (Jij in Ti).
i - phase of Task Ti, equal to ri1.
ui - utilization of Task Ti = ei / pi
In addition the following parameters apply to a set of tasks
H - Hyperperiod = Least Common Multiple of pi for all i: H = lcm(pi), for all i.
U - Total utilization = Sum over all ui.
Schedulable utilization of an algorithm Us
If U < Us the set of tasks can be guaranteed to be scheduled

Fixed Priority Algorithms
Rate Monotonic scheduling Priority assignment based on rates of tasks Higher rate task assigned higher priority Schedulable utilization = 0.693 (Liu and Leyland) If U < 0.693, schedulability is guaranteed Tasks may be schedulable even if U > 0.693
Deadline Monotonic scheduling Priority assignment based on relative deadlines of tasks Shorter the relative deadline, higher the priority Useful when relative deadline ≠ period
Both of the above usually done off-line since fixed priority assigned at task level
Online dispatcher enforces the schedule by dispatching higher priority jobs before lower priority jobs

Dynamic Priority Algorithms
Online scheduler assigns priorities for jobs released
Dispatcher dispatches the highest priority job
Suitable for scheduling aperiodic as well as periodic tasks
Earliest Deadline First (EDF) Priority assignment based on absolute deadline of jobs Job with closest deadline assigned highest priority Schedulable utilization = 1
Least Laxity First (LLF) Laxity = Absolute Deadline – Worst case computation time Priority assignment based on laxity of jobs Job with minimum laxity assigned highest priority Schedulable utilization = 1
Dynamic Priority algorithms provide better processor utilization than Fixed Priority algorithms

Hybrid algorithms
Not all algorithms are robust in overload situations
To improve predictability for critical tasks, use a combination of fixed and dynamic priority algorithms
Tasks divided based on criticality – critical and non-critical
Critical tasks scheduled using fixed priority assignment
Non-critical tasks scheduled based on dynamic priority assignment
Examples - Maximum Urgency First, RM + MLF

Blocking factors
Sometimes a higher priority job cannot run because Currently running lower priority job is non-preemptive (priority-
inversion) E.g., non-preemptable system call
Self-suspension E.g., i/o operations, remote calls
Above blocking delays need to be taken into account while doing schedulability analysis
Blocking delay should include Maximum blocking time due to non-preemptability of lower
priority tasks Maximum own self suspension time and maximum self-
suspension time of all higher priority tasks Context switches
ORB endsystem example (1/2)
Client ServerC
Reactor
3 wait
Re
acto
r
Servant
Deadlock here
Callback
1 2 4
5
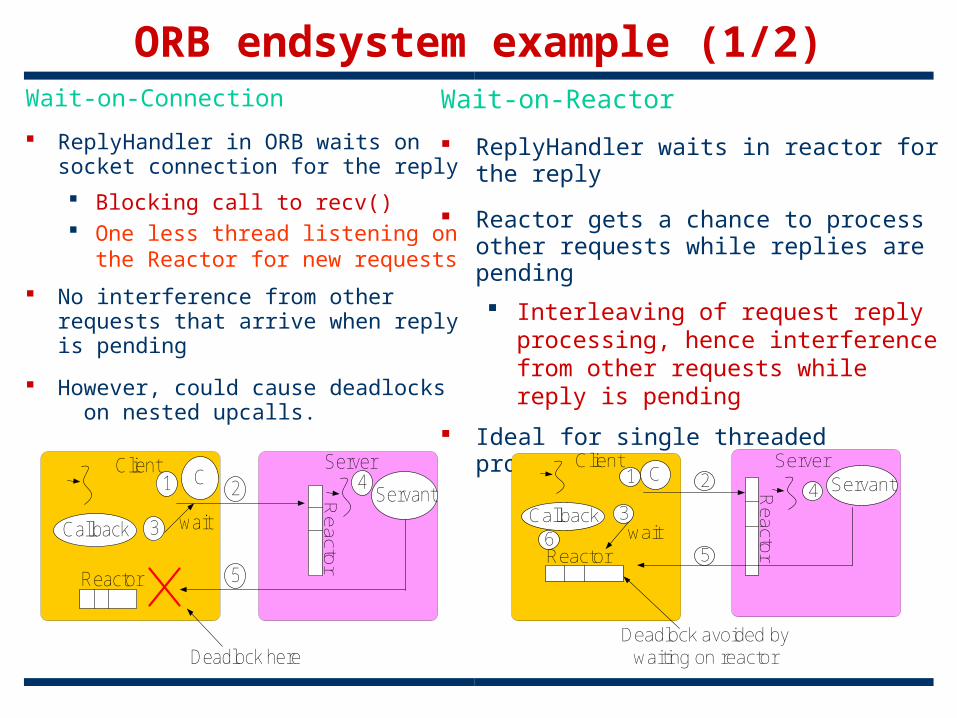
Wait-on-Connection
ReplyHandler in ORB waits on socket connection for the reply
Blocking call to recv() One less thread listening on
the Reactor for new requests
No interference from other requests that arrive when reply is pending
However, could cause deadlocks on nested upcalls.
Wait-on-Reactor
ReplyHandler waits in reactor for the reply
Reactor gets a chance to process other requests while replies are pending
Interleaving of request reply processing, hence interference from other requests while reply is pending
Ideal for single threaded processing
Client ServerC
Reactorwait
Re
acto
r
Servant
Callback6
Deadlock avoided bywaiting on reactor
1
342
5

ORB endsystem example (2/2)
f1 f4
f7 f2 f5
f8 f3 f6
P
Wait-on-Reactor strategy could cause interleaved request/reply processing
Blocking factor could be bounded or unbounded Based on the upcall duration And number of intervening upcalls
Blocking factors may affect real-time properties of other end-systems Call-chains can have
a cascading blocking effect
f2f5
f3f6
f5 replyqueued
f3 returns
f5 replyprocessed
f2 returns
Blocking factor for f2

Algorithm selection
Periodic RMS/MUF/DM
Periodic, Blocking RMS/MUF/DM with Priority Ceiling
Periodic?, Predictable Overload behavior
MUF, RM+MLF
Maximum Utilization EDF,MLF
Single Processor
End to End Scheduling

End-to-end task model
A task is composed of multiple subtasks running on multiple processors Remote method invocation Non-local event Messages
Subtasks are subject to precedence constraints Task = a chain of subtasks
A task is subject to an end-to-end deadline Does not care about the response time of a particular subtask
End-to-End scheduling should address Task allocation : bind tasks to processors Synchronization protocols : to enforce precedence constraints Subdeadline assignment Schedulability analysis
Thanks to Dr. Lu for permitting to use material from CS520 slides
Task Allocation
Strategies Offline, static allocation Allocate a task when it arrives Re-allocate (migrate) a task after it starts
NP-hard: heuristics needed
Bin-Packing formulation Pack subtasks to bins (processors) with limited capacity
“Size” of a subtask Ti,j: ui,j = ei,j/pi “Capacity” of each bin is its utilization bound, e.g., 0.69 (RMS) or 1
(EDF) under ideal assumptions Goal: minimize the number of bins subject to the capacity
constraints
Thanks to Dr. Lu for permitting to use material from CS520 slides

The Synchronization Problem
Given that Priorities are assigned to subtasks in a task chain using some fixed
priority assignment algorithm
How do we coordinate the release of subtasks in a task chain so that Precedence constraints among subtasks are satisfied subtask deadlines are met end-to-end deadlines are met
Synchronization Protocols
Direct Synchronization (DS) Protocol Simple and straightforward
Phase Modification (PM) Protocol Proposed by Bettati Extension called Modified Phase Modification (MPM) Protocol
Release Guard Protocol Proposed by Sun

Synchronization Protocol - Example
P1 P2
(4,2)T1
(6,2)T2,1
(6,2)T2,2
(6,3)T3
Ti,j – jth subtask of task Ti
(period,execution time)
Period = relative deadline of parent task
Task T3 has a phase of 4 time units

Direct Synchronization Protocol
Greedy strategy
On completion of subtask A synchronization signal sent to the next processor Successor subtask competes with other tasks/subtasks on the
next processor

Direct Synchronization Illustrated
On P1
On P2
T1
T2,1
T2,2
T3
2 4 6 8 10 12
2 4 6 8 10 12
2 4 6 8 10 12
2 4 6 8 10 12
Phase of T3
T3 misses
deadline
P1 P2
(4,2)T1
(6,2)T2,1
(6,2)T2,2
(6,3)T3
Phase Modification Protocol
Proposed by Bettati
Release subtasks periodically According to the periods of their parent tasks
Each subtask given its own phase
Phase determined by subtask precedence constraints

Phase Modification Protocol Illustrated (1/2)
T1,1
T1,2
T1,3
T1,1 T1,2 T1,3
Actual response time
Estimated worst case response time
Phase of T1,2 Phase
of T1,3
p1
p1
p1

Phase Modification Protocol Illustrated (2/2)
On P1
On P2
T1
T2,1
T2,2
T3
2 4 6 8 10 12
2 4 6 8 10 12
2 4 6 8 10 12
2 4 6 8 10 12
Phase of T3
P1 P2
(4,2)T1
(6,2)T2,1
(6,2)T2,2
(6,3)T3
Phase of T2,2

Phase Modification Protocol - Analysis
Periodic Timer interrupt to release subtasks
Centralized clock or strict clock synchronization
Task overruns could cause Precedence constraint violations

Modified PM Protocol Illustrated (1/2)
T1,1
T1,2
T1,1 T1,2 T1,3
Actual response time
Estimated worst case response time
p1
Overrun ∆
p1 + ∆
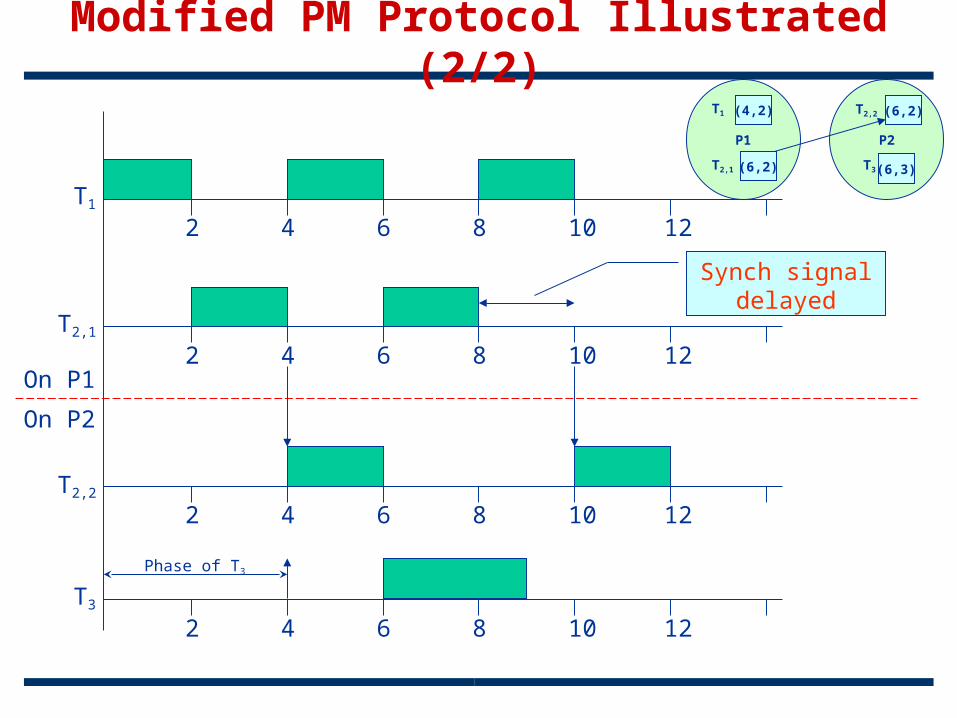
Modified PM Protocol Illustrated (2/2)
On P1
On P2
T1
T2,1
T2,2
T3
2 4 6 8 10 12
2 4 6 8 10 12
2 4 6 8 10 12
2 4 6 8 10 12
Phase of T3
P1 P2
(4,2)T1
(6,2)T2,1
(6,2)T2,2
(6,3)T3
Synch signal delayed

Modified PM Protocol - Analysis
MPM protocol behavior the same as PM under ideal conditions Ideal conditions – Clocks synchronized, no overrun
MPM protocol does not need clock synchronization
Precedence constraints preserved even in the case of overruns
Upper bound on End-to-End Response time of task Ti
Ri,k is the response time of the kth subtask of Ti
ni is the number of subtasks for the task Ti
Lower bound on End-to-End Response time of task Ti
1
1,
in
kkiR
in
kkiR
1,
+ Actual Response time of nith subtask
Lower bound high, hence high average EER time, but low output jitter
Release Guard Protocol
Proposed by Sun
A guard variable – release guard - associated with each subtask
Release guard used to control release of each subtask Contains next release time of subtask
Synchronization signals just like MPM
Release guard updated On getting synchronization signal During idle time

Release Guard Protocol Illustrated
On P1
On P2
T1
T2,1
T2,2
T3
2 4 6 8 10 12
2 4 6 8 10 12
2 4 6 8 10 12
2 4 6 8 10 12
Phase of T3
P1 P2
(4,2)T1
(6,2)T2,1
(6,2)T2,2
(6,3)T3
g1,2 = 4+6=10 g1,2 = 9
Idle time detected

Release Guard Protocol - Analysis
Shares the same advantages as MPM
Upper bound on EER still the same as MPM Since upper bound on release time enforced by release guard
Ri,k is the response time of the kth subtask of Ti
ni is the number of subtasks for the task Ti
in
kkiR
1,
Lower bound on EER less than that of MPM If there are idle times Results in lower average EER
Subdeadline Assignment
Subdeadline -> priorities under EDF & DM
Optimal subdeadline assignment is NP-hard Offline: heuristic search algorithms Online: simpler heuristics
Effective Deadline (ED): Work backwards from the end-to-end deadline
Slack assignment Assign all slack to 1st subtask Assign slack proportionally to execution time Assign more slack to subtasks on busier processors
Thanks to Dr. Lu for permitting to use material from CS520 slides

Holistic Scheduling
Combine processor scheduling with communication bus scheduling to provide an integrated schedulability analysis
Calculate bounds on end-to-end delays in distributed systems including communication delays
Typically used in hard real-time systems to calculate the worst case end-to-end response time of tasks

Algorithm selection
Use MPMP or RG if Information about all tasks are available a priori System has global clock sync
Otherwise only RG can be used
Use MPMP for low jitter and RG for lower average EER
References
Synchronization Protocols in Distributed Real-Time Systems, ICDCS 96 Jun Sun, Jane Liu
Real-time Systems Jane Liu
Holistic Schedulability for Distributed Hard Real-time Systems, Microprocessing and Microprogramming - Euromicro Journal 1994 (Special Issue on Parallel Embedded Real-Time Systems) Ken Tindell, John Clark
VEST: An Aspect-Based Composition Tool for Real-Time Systems, RTAS 2003 Stankovic, Lu, et.al

DM with phase offset
Distributed Task - conceptual Period=P1
T1
Actual Distributed Scheduling ProblemProc 1
Proc 2
Proc 3
D11 Phase Offset
D11 where D11 < P1 => DM
= Communication delayD12 Phase Offset D13
T11
T12
T13
Distributed Task - conceptual Period=P1
T1
Actual Distributed Scheduling ProblemProc 1
Proc 2
Proc 3
D11 Phase Offset
D11 where D11 < P1 => DM
= Communication delayD12 Phase Offset D13
T11
T12
T13












![SUPREME COURT OF INDIA · the state of kerala and ors. venkita subramoniam t.r[r-3], arpit shukla[r-6] [to be taken up after item no. 28] ia no. 12083/2021 - exemption from filing](https://static.fdocuments.net/doc/165x107/611a4629f0430b53754ea842/supreme-court-of-india-the-state-of-kerala-and-ors-venkita-subramoniam-trr-3.jpg)





