

Real Time Operating Systems
22
CCM4320(NETWORK SYSTEMS AND SERVICES), MIDDLESEX UNIVERSITY,LONDON PREPARED BY PAWANDEEP KAUR M00343421 Real Time Operating System (RTOS)
-
Upload
pawandeep-kaur -
Category
Technology
-
view
317 -
download
2
Transcript of Real Time Operating Systems

CCM4320(NETWORK SYSTEMS AND SERVICES),MIDDLESEX UNIVERSITY,LONDON
PREPARED BY PAWANDEEP KAUR
M00343421
Real Time Operating System(RTOS)

1)REAL TIME OPERATING SYSTEM(INTRODUCTION AND CONCEPTS)
2)DIFFERENCE BETWEEN REAL-TIME AND TRADITIONAL OPERATING SYSTEMS
3) NUCLEUS AND ITS FEATURES
4)WILL REAL TIME SYSTEMS REPLACE TRADITIONAL OS?(FUTURE OF TECHNOLOGY)
Topics Discussed

* Real-time (software) (IEEE 610.12 - 1990): Response to an external process in a timely manner when it is performed in actual time and results are used to control, monitor and respond aptly.
* It manages the hardware resources and hosts applications like GPOS, with precise timing and high degree of reliability.
What is Real-Time Systems(RTOS)?

Hard Real Time : A timeline constraint shall be satisfied or the task results in critical failure.
Example: Aircraft, Autopilot plane, and Medical critical care system etc.
Firm Real time: Missing a constraint entails unacceptable quality reductions.
Example : Multimedia applications.
Soft Real Time: Missed deadline is acceptable and it can be recovered with no impact on quality.
Example: Online Transaction System, Stock price quotation system.
Types of RTOS

Features
&Key Concepts
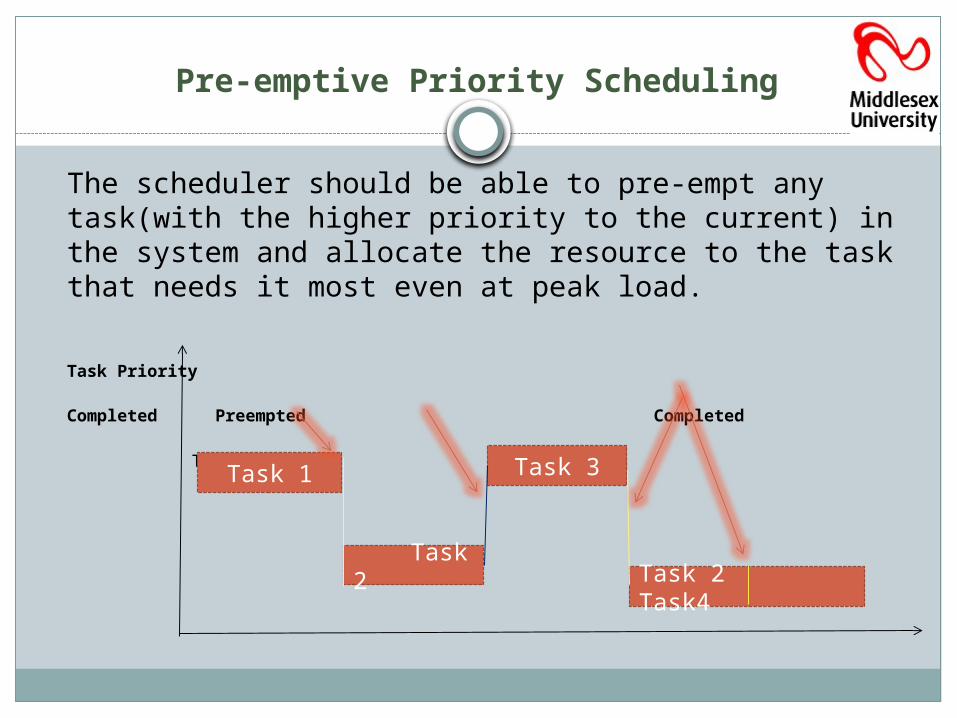
Pre-emptive Priority Scheduling
The scheduler should be able to pre-empt any task(with the higher priority to the current) in the system and allocate the resource to the task that needs it most even at peak load.
Task Priority
Completed Preempted Completed
Time
Task 1
Task 2
Task 3
Task 2 Task4

Multitasking
RTOS supports multitasking in real time applications.
Responding in a predictable way to multiple simultaneous external events (happening in an uncontrolled way).
RMS(Rate-Monotonic Scheduling) : An algorithm with a static-priority scheduling class
The static priorities are assigned on the basis of the cycle duration of the job.

Reliable and Sufficient Inter Task Communication Mechanism
For task synchronization Event Objects and Semaphore mechanism is used.
1) Event objects are used when synchronization is required without resource sharing. One or more task is kept waiting for a specified event to occur.
2)A semaphore function is a key which needs to be acquired task to obtain the resource, under resource sharing environment.
continue…….

count=0 count=1
Inter-task communication involves sharing of data among tasks through sharing of memory space, and transmission of data.
Mechanisms• Message queues• Pipes• Remote procedural calls (RPC)
Inter Task Communication
Shared Resource
Task ATask B
R1
Occupied by Task A. Task B is not
authorized until released by Task A

Priority Inheritance
Priority inheritance is a method for eliminating priority inversion problem with semaphores, by increasing the priority of the running process holding the resource to the maximum.
Increasing
High priority task
Attempts to take semaphores and blocks
Priority Enter ready state
Semaphore Takes Semaphore Medium priority task preempts Gives Semaphore low priority task Low priority task
Time

Control of Memory Management
In RTOS memory access time should be bound(predictable).
In Hard Real Time systems, static memory allocation system is used at start up.
In Soft Real Time Systems, dynamic memory allocation is used without Virtual Memory and Compaction.
The Stack Management or kernel stack is the memory management process in RTOS, where allocation of memory is done using Task Control Block
Heap Management: When a task finishes using a memory block it return memory to heap. It is used by kernel for dynamic memory allocation.

Predefined Short Latencies
RTOS have accurate and shortest timing of its system calls for the following behaviors:
• TASK SWITCH OR CONTEXT SWITCH• INTERRUPT LATENCY• INTERRUPT DISPATCH LATENCY

TIME CONSTRAINTS !PREDICTABILITY !
RT & non-RT systems?
Key Differences
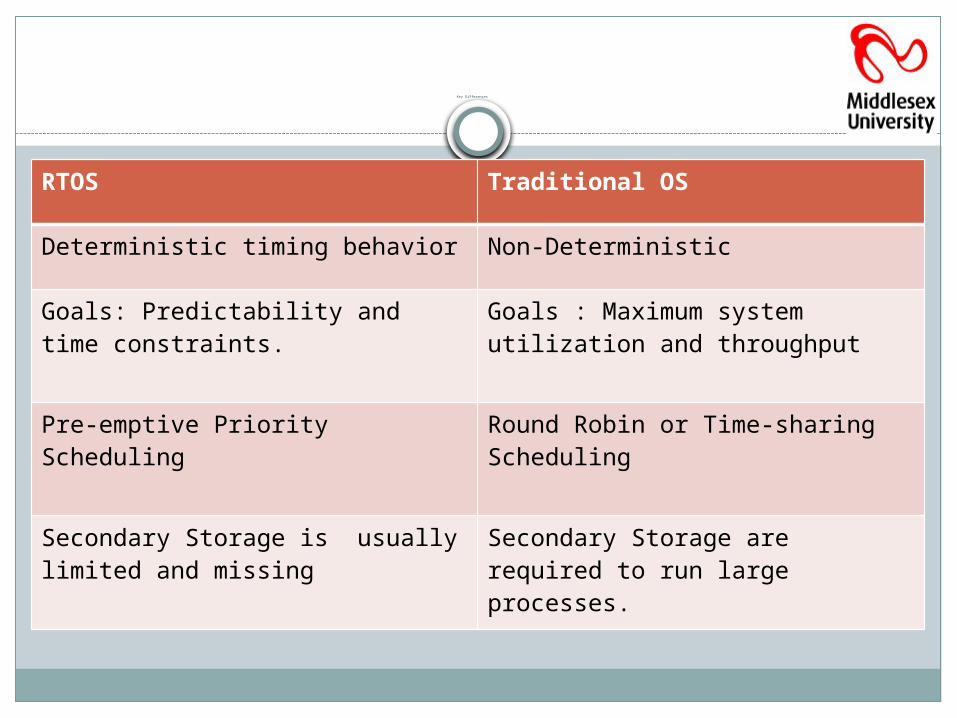
RTOS Traditional OS
Deterministic timing behavior Non-Deterministic
Goals: Predictability and time constraints.
Goals : Maximum system utilization and throughput
Pre-emptive Priority Scheduling Round Robin or Time-sharing Scheduling
Secondary Storage is usually limited and missing
Secondary Storage are required to run large processes.

few more !
Interrupt latency is bounded Interrupt latency is variant and not bounded.
Static Memory allocation Dynamic memory allocation
No Virtual Memory and Compaction
Virtual Memory and Compaction is an integral part of Memory Management
Mission critical dedicated applications and control devices
Large Database and general purpose applications

By the Embedded Systems Division of Mentor Graphics.
It is an efficient real-time operating system with1. Database management.2. USB 3. Networking4. Multimedia and advanced GUIIt has evolved into a complete OS comprised of
kernel services, extensions, and APIsSupport range of electronic products and different
types of microprocessors.
NUCLEUS RTOS

Features
*Hard/ Soft real-time performance * Dynamic task creation/deletion
* Inter-task communication and synchronization via mailboxes, queues, pipes, semaphores
* Application timers/Event flags* Full MMU support* Static/dynamic memory allocation
* Dynamic loading of code * Familiar APIs including C++, ANSI C, POSIX * Scales to any target hardware
Features

Supports a full range of OS services
Comprehensive support for networking
Multiple file formats
User Interface: Desktop-like control framework, bitmaps shapes, BSD, 3D interface engine
802.1x wireless protocols
Supports various modern input and output devices

Broad Hardware Support
Nucleus RTOS has been ported to hundreds of different processors across various architectures including however not limited to

HYBRID SOLUTIONS
(THE RTOS AND GPOS ON THE SAME MACHINE, COMMUNICATING VIA SHARED MEMORY OR
OTHER TECHNIQUES. THE HOST OS IS THE RICH GPOS AND TARGET OS IS THE DEDICATED RTOS)
Will Real Time Operating Systems replace Traditional OS
?

Basic Lacking in Today’s RTOS•Does not have all features of GPOS like source code control systems, back up tools.
•Too expensive to cover vast IT market.
•Complicated to design and harder to use.
•An overqualified RTOS on applications have negative impacts on time-to-markets.
•Increase in the usage of soft real time based applications.
• Emergence in the parallel and distributed systems


















