

Ready - European Space Agencyrobotics.estec.esa.int/ASTRA/Astra2013/Presentations/Bhagat... ·...
29
Ready
Transcript of Ready - European Space Agencyrobotics.estec.esa.int/ASTRA/Astra2013/Presentations/Bhagat... ·...

Ready

DESIGN, SIMULATION AND TESTING OF SHRIMP ROVER USING RECURDYN
Shivesh Kumar, Raghavendra S, Mihir R Bhagat, Gangadharan K V,Department of Mechanical Engineering
12th Symposium on Advance Space Technologies in Robotics and Automation,ESA / ESTEC, Noordwijk, The Nethelands
NATIONAL INSTITUTE OFTECHNOLOGY KARNATAKA
Surathkal, INDIA

CONTENT
• Introduction- Shrimp
- RecurDyn
• Work in RecurDyn- Modeling of Shrimp
- Dynamic simulation on various terrain profiles
• Shrimp: Manufacturing• Experimental Validation• Results & Discussions• Conclusions
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

INTRODUCTION
• Rovers: Most suitable for planetary exploration
• Over 300 design concepts developed already
• Shifting trends: Long-term, reusable rovers
• Fewer solo-missions. Regular inclusion of a greater bigger objective.
Rover deliverables increase:
• Long range• Greater mobility• Low power consumption• High modularity• Ease of control
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

SHRIMP ROVER
• Innovative 6 wheeled rover
• Design at the Swiss Federal Institute of Technology (EPFL), Lausanne
• Design objective: Long-range mission for Martian exploration
• Fully functional prototype was demonstrated at ESTEC (2000)
Image: EPFL
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

SHRIMP ROVER: KEY FEATURES
• 6 motorized wheels
• 2 parallel bogies, front and rear forks
• Passive control
• Excellent mobility:
- Obstacle climbing - 2 x wheel dia.
- Topple resistance - Upto 40 degrees
- Pure steering possible
Image: EPFL
(a)
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands
RECURDYN
• Multi-body dynamics software
• Advantages over other softwares:
- No more excessive simplification
- High solving efficiency
- Good solving stability
• Equations of motion theory in recursive formation
• High precision, fast solving.
!!"#$%&'()! *+! ,)! "##$%&'"%(! -%./*012(! '(),3*$+! 0,+#2!4567+18/9,&#! 188#&*):! +/,/#7187/;#7,&/! -<'! $,=,0*.*/*#+!9*/;!,)! *)/#:&,/#2!=19#&8%.!,)2!%)*>%#!)1)7.*)#,&!?6-!#@/#)+*1)A! ! /&%#! )*+,-! 3#$;,)*$,.! +(+/#3!+*3%.,/*1)! &#/%&)+!31&#!=&#$*+#!2(),3*$!31/*1)! &#+%./+!*)$.%2*):!+/&#++!,),.(+*+! *)!1)#!+*):.#!+*3%.,/*1)!+/#=A! B/!,.+1! 8#,/%&#+! 8.#@*0.#! 012(! $1)/,$/+! ,)2! )1)7.*)#,&!2#81&3,/*1)+A!
"#$%&'()C41D*)EF! ,)! *)/#:&,/#2! +*:),.! 8.19! 1&*#)/#2!$1)/&1.! 2#+*:)! /11.F! 1=#)+! /;#! 211&! /1! ,)! 1887.*)#!+*3%.,/*1)!18!3#$;,/&1)*$!+(+/#3+F!:1*):!8,&!0#(1)2!/;#!$.,++*$,.! 417G*3%.,/*1)! ,==&1,$;A! <(! %+*):! ,! 2#/,*.#2!"#$%&'()!?6-<'!=.,)/!312#.! /;#!%+#&! $,)! +*:)*8*$,)/.(!%$#!/;#!)%30#&!18!.11=+!2%&*):!/;#!H*&/%,.!$1)/&1..#&!=,&,3#/#&!1=/*3*I,/*1)!=&1$#++A!
J;#! %)*>%#! !"#$%&'("! )*+,-'#&! +1.H#&! /#$;)1.1:(!&#=&#+#)/+!1)#!18!/;#!31+/!#88*$*#)/!9,(+!*)!+1.H*):!-<'!#>%,/*1)! 18!31/*1)+! /12,(F! =&1H*2*):! ;*:;7&,/#2! +1.H#&!&10%+/)#++! ,)2! &#.*,0*.*/(! ,/! /;#! +,3#! /*3#A! 5..! /;*+!./'/0(! $0"(#'(1! /#$;)1.1:(! *+! #30#22#2! *)! ,! 312#&)!KLB!9*/;!,! $.#,&! 81$%+!1)! ! 81..19*):!+/,)2,&2!+18/9,&#!;,)2.*):!&%.#+A!!
.! 23&4&54(! +/&%$/%&#! ,..19+! ,! +/#=70(7+/#=!
,==&1,$;!0(! +/,&/*):! 8&13! $.,++*$,.!-<'!3#/;12+F! 0%/!)#H#&! .#,2+! *)/1! ,! 2#,27#)2! &1,2! *8! */! $13#+! /1! #H#)!)1)7.*)#,&!?65!,)2!$1)/&1.!+/&%$/%&#!312#.!*)#3#)/+A!
"#$%&'()CM&1$#++N#/! .#/+!/;#!%+#&!&1&6'!,)2! *)/#:&,/#!?6-<'!$,=,0*.*/*#+!/1!,)(!4567=&1$#++A!<(!%+*):!4O!/;#!%+#&! ;,+! ,$$#++! /1! /;#! 8%..! =19#&! 18! ,! +/,)2,&2*I#2!=&1:&,33*):! .,):%,:#! )1/! 0#*):! /&,==#2! 0(! /;#!&#+/&*$/*1)+!18!,!=&1=&*#/,&(!.,):%,:#A!
P,&*1%+!&664"3&'"$#!$0"(#'(1! .*0&,&*#+! 81$%+! #@,$/.(!1)!/;#!+=#$*8*$!+*3%.,/*1)!/,+E+!18!/;#!$%+/13#&+A!
!
!.B/! *+! ,! +,(*):! *)! /;#! 456! $133%)*/(! /;,/! ,! +18/9,&#! *+!1).(!,+!:112!,+!/;#!2/66$0'!0#;*)2!*/A!J;*+!*+!#H#)!31&#!/&%#! ,+! +18/9,&#! 8%)$/*1),.*/(! ,)2! 312#.! $13=.#@*/(! *+!+/#,2*.(! *)$&#,+*):A! Q).(! ,)! #@=#&*#)$#2! /#,3! 9;*$;! *+!,.+1!*)H1.H#2!*)!&#,.!91&.2!$1)+%./*):!=&1R#$/+!$,)!188#&!,!7$041!34&22!2(0%"3(!/;#!$%+/13#&!*+!=,(*):!81&A!!!
8##$%&'"%(!!./'/0(!$0"(#'(1!'(39#$4$:;!
<3&4&54(=!&1&6'"%(!!&664"3&'"$#!$0"(#'(1!
>$041!34&22!2(0%"3(!!2/66$0'!
?*&+/7&,/#2! *)/#&,$/*H#! ,)2! =,&,3#/&*$!312#.*):! #)H*&1)3#)/! =&1H*2*):! 45'.*E#! +%0+(+/#3! /#$;)*>%#+A! G%==1&/+! ,..!$1331)!45'72,/,!#@$;,):#!81&3,/+A!
413=.#/#! +/,/# 18 /;#7,&/! -%./*012(!'(),3*$+!$13=1)#)/!.*0&,&(A!
52H,)$#2!:#)#&,.!S' $1)/,$/+!*)$.%2*):!,),.(/*$,.! $1)/,$/+! 81&! ,! 9*2#! &,):#! 18!&#:%.,&!+;,=#+A!
M,&/! 8.#@*0*.*/(!%+*):!312,.! %$/*1)!1&!%)*>%#!)1)7.*)#,&!?67+/&%$/%&#+!*)$.%2*):!$1)/,$/!,),.(+*+!,)2!.,&:#!2#81&3,/*1)+A!
G%==1&/+! 3%./*2*+$*=.*),&(! 312#.+! 9*/;!/;#! *)/#:&,/#2! $1)/&1.! 2#+*:)! =,$E,:#!"'C41D*)E! 1&! H*,! 1=#)! 417G*3%.,/*1)!*)/#&8,$#!!T#A:A!-5JD5<CG*3%.*)EF!53#G*3U!
D,/#+/!+1.H#&!:#)#&,/*1)!9*/;!&10%+/!,)2!&#.*,0.#! B-K5DMV5! +*):.#7+/#=! ,)2!'5GGD! 3%./*7+/#=! 3#/;12+F! 8#,/%&*):!%)*>%#! V(0&*27G1.%/*1)! /#$;)1.1:(! 81&!.,&:#!312#.+A!
'%#!/1!,!312%.,&!$1)$#=/!"#$%&'()!$,)!:&19! =,&,..#.! /1! /;#! ! #@=#&*#)$#!%)2!8%)$/*1),.!+18/9,&#!2#3,)2+A!
"'CM&1$#++N#/F!,!=&18#++*1),.!4O!0,+#2!,==.*$,/*1)!=&1:&,33*):!*)/#&8,$#!T5MBUF!.#/+! ,)(! %+#&! ,%/13,/#F! ,2,=/! ,)2!#@/#)2! "#$%&'()! 8%)$/*1),.*/(! /1! ;*+!+=#$*8*$!)##2+A!
5==.*$,/*1)! 1&*#)/#2! /11.E*/+! 8#,/%&#!=&18#++*1),.! 0%*.27*)! E)197;19! 8&13!*)2%+/&*,.!2#H#.1=3#)/!=,&/)#&+A!!
?%)$/*1)<,(! 188#&+! =&18#++*1),.! +#&H*$#+!*)!,..!,&#,+!18!3#$;,)*$,.!+*3%.,/*1)A!
J;#! "#$%&'()! ;1/.*)#! *+! +#&H#2! 0(!#@=#&*#)$#2! $1)+%./*):! #):*)##&+! /1!:%,&,)/##! ;*:;! .#H#.! $%+/13#&!+,/*+8,$/*1)A!
52H,)$#2!!!!!!!6):*)##&*):!!G1.%/*1)+!
W!XYZZ!?%)$/*1)<,(!K30V!
A product of
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

MODELING OF SHRIMP
• Initial design based on SHRIMP III by BlueBotics (www.bluebotics.com)
• Design made in CATIA V5
• Imported to RecurDyn and joints defined
Type of JointType of Joint No. of Joints
Type of Actuation
Revolute joints
Between body and wheels
6 Active
Revolute joints
In front fork 4+1 4 Passive, 1 Active
Revolute joints In rear fork 1 Active
Revolute joints
In right parallel bogie
6 Passive
Revolute joints
In left parallel bogie
6 Passive
Other parameters defined as well:
• Wheel speed: 30 rpm
• Friction: μstatic = 0.5 μdynamic = 0.3
• Tire and road surface properties:
• Spring coeff. = 1000 N.mm
• Damping coeff. = 1
• Damping friction coefficient = 0.9
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands
DYNAMIC SIMULATION
• Kinematic and Dynamic simulation done using the multi-body dynamics solver of RecurDyn
• Simulation time and time steps chosen suitably
• The rover capabilities are tested on 3 types of terrains:
- Ability to climb steps
- Ability to climb a inclined surface
- Ability to adapt passively with concave/convex terrains
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

CLIMBING STEPS
• Obstacle: Step
• Step size: 200 mm
• Under review: Torque requirements of the wheels
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands
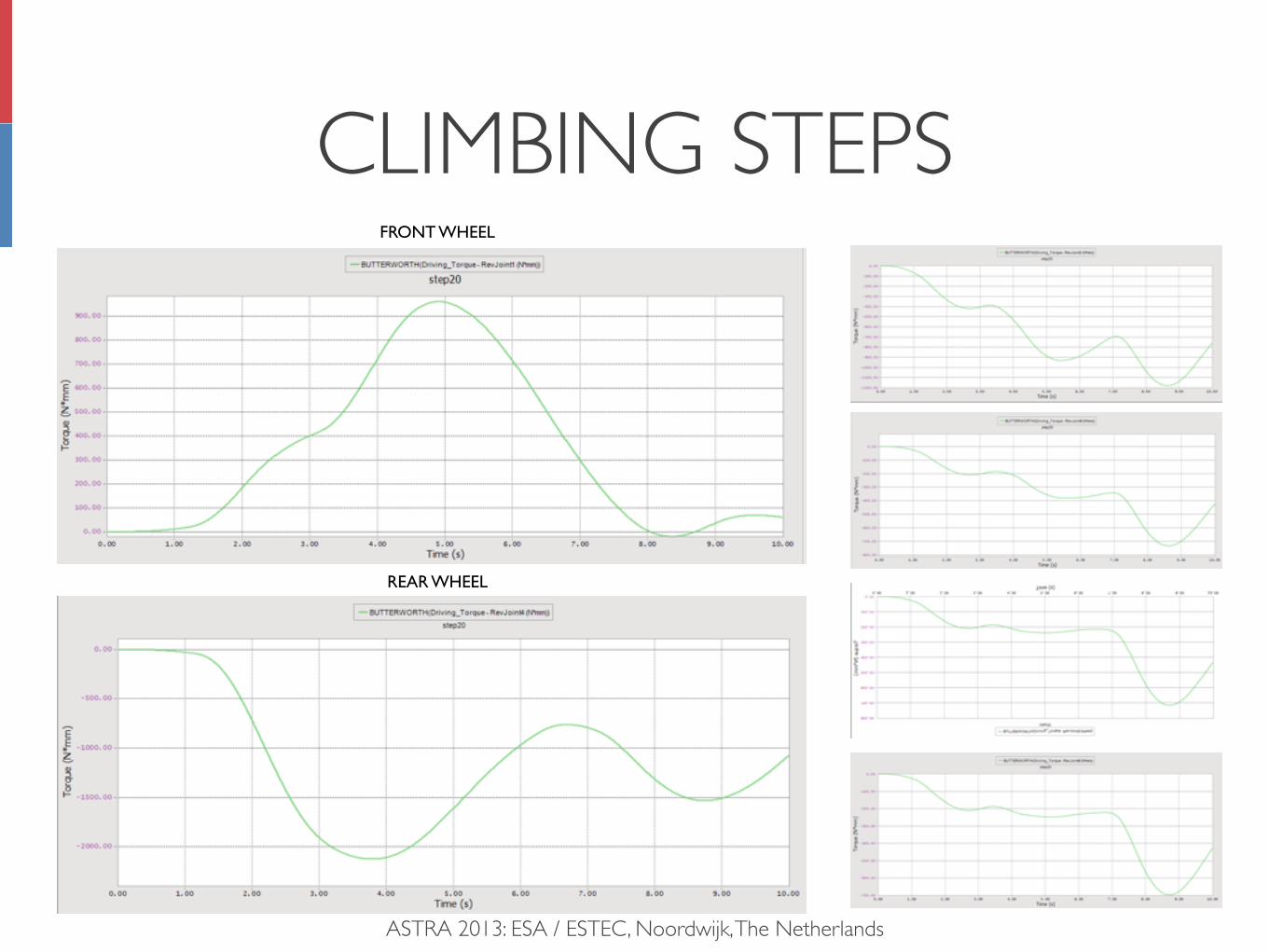
CLIMBING STEPSFRONT WHEEL
REAR WHEEL
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

CLIMBING INCLINATION
• Obstacle: Slope
• Slope inclination: 40 degree
• Under review: Torque requirements of the wheels
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

CLIMBING INCLINATIONFRONT WHEEL
REAR WHEEL
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

CURVED SURFACE ADAPTABILITY
• Shrimp makes use of a passive suspension system
• Its is tested to check its adaptability to curved surfaces.
• Ex.: Concave
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

TORQUE ANALYSIS
Wheel-Bogie Joint Position Max Torque (Kg-cm)
Front Fork 32.1
Right Front 7.5
Right Rear 7.4
Left Front 7.0
Left Rear 6.8
Rear Fork 16.3
• Maximum torque required is close to 32.1 kg-cm
• Factor of Safety: 1.25
• Hence, Torque requirement becomes 40.1 kg-cm
• Available option: 45 kg-cm motors.
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

SHRIMP: MANUFACTURING
• Major Parts
- Main body
- Parallel bogies
- Front & Rear fork
- Electronics sub-system
• Built in-house at NITK
• Undergraduate project: Resources and facilities greatly constrained.
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

MAIN BODY
• Twin Alumnium pentagons form the base
• Supporting aluminium blocks:
- To join the two plates
- Support the load
- Mounting point for revolute joints
• Bearings used for revolute joints
• Similar setup for the front fork
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

PARALLEL BOGIE
• Aluminium bogies mounted on either side of the rover
• Frames of C-section links that form a couple
• Mounted on freely rotating central pivot
• NOTE: Left and right bogie should be greatly identical to avoid mismatch in travel
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

FRONT & REAR FORKS
• Wheel mounted at the forks
• Front fork is similar to a 4 bar mechanism; wheel made to travel upward when it encounters obstacle
• Steering is achieved using servos whose axis is perpendicular to the ground and the axis of wheels
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

ELECTRONICSKey Features
• 2 parts: Base station & On-board control system
• Completely wireless control and data transmission using Xbee module
• Wireless video feed
• 2 ATMEGA16 processors in master slave configuration
• Light and portable LiPo battery along with battery protection circuit
• Interactive GUI using Matlab
User
MATLAB based GUI
Intel Core 2 DuoProcessor (2.4 GHz)
based PC
Sensor DataLive Video feed
Rover Control Commands
Wireless Xbee Module (Transmitter)
USB TV
Tuner
RFReceiver
A/V feed FTDI based USB - UART bridge
Wireless Xbee Module (Receiver)
Atmega 16 based developer board (AVRiboard2.0)
RFTransmitter
AVR-iboard
2.0
Master Controller Slave Controller
3 units of:8-28 V, 5A dual DC motor
drivers with current sensing
Right Bogie
Left Bogie
Front & Rear Fork
Front & Rear Fork’sServo for Steering
Servo Pod2 servos
SHARP IR Range Sensor
Wireless Video Camera
BASE STATION
ON-BOARD CONTROL SYSTEM
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

EXPERIMENTAL VALIDATION
Process
• Make the rover traverse obstacle paths to prove capabilities
• Measure armature current drawn by the motors and thus, estimate the driving torque requirements
• Compare Driving Torque v/s Time graphs with those of RecurDyn
Obstacles
• Step Test:8cm height
• Slope Test:30 degree inclination
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

MEASURING THE TORQUEHow to calculate torque?
τ = Kt × I
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands
THE EXPERIMENTS

VALIDATION RESULTS
• Step Test
• Front Wheel
• Mean Absolute Percentage Error (MAPE) = 35.62%
• Slope Test
• Rear Wheel
• Mean Absolute Percentage Error (MAPE) = 42.87%
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands
JUSTIFICATION FOR ERRORS
MAPE typically varied between 35 - 45 % for all cases.
• Effects of electrical DC drive model not included in our simulation. Non-linearities like BEMF voltage, friction between bearings, etc affect the system
• Incorrect data / estimation used in modeling: friction in revolute joints, contact friction, etc
• Mismatch between modeled and actual mass-inertia properties
• Simplified model: Nuts, bolts, clamps, etc not modeled
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

CONCLUSIONS
• Modeling & dynamic simulation of Shrimp through RecurDyn
• Virtual testing of rover on different terrains
• RecurDyn helped in selecting actuators for given payload requirements
• Experimental validation gave satisfactory results
• RecurDyn can be further exploited by better handling of problem at hand
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands

ACKNOWLEDGEMENTS
Mr. B Sridhar, Director of Function Dynamics India Pvt. Ltd.
for issuing provisional licenses of RecurDyn for our project.
NITK Alumni Associationfor providing a soft loan to attend this conference.
ASTRA 2013: ESA / ESTEC, Noordwijk, The Netherlands


















