
RC Model Aircraft Design Analysis Notes · section on in-flight performance combining the...
33
RC Model Aircraft Design Analysis Notes Notes and Formulas Useful In Analyzing the Performance of Model Aircraft William B. Garner Rev 2, December 2018 Rev 1 Notes: Revised Aircraft Lift and Drag section, adding measurement units for metric and English systems Expanded drag equations to include fuselage and tail contributions Removed or modified most formulas containing English units Corrected several errors Rev2 Notes: There is some minor editing, clarification of some measurement units, correction of formula for Moment. Provides notes and formulas for the evaluation of model aircraft performance. Subjects included are aerodynamics, propellers and electric power systems.
Transcript of RC Model Aircraft Design Analysis Notes · section on in-flight performance combining the...
RC Model Aircraft Design Analysis Notes
Notes and Formulas Useful In Analyzing the Performance of Model Aircraft
William B. Garner
Rev 2, December 2018
Rev 1 Notes: Revised Aircraft Lift and Drag section, adding measurement units for metric and English systems Expanded drag equations to include fuselage and tail contributions Removed or modified most formulas containing English units Corrected several errors
Rev2 Notes: There is some minor editing, clarification of some measurement units, correction of formula for Moment.
Provides notes and formulas for the evaluation of model aircraft performance. Subjects included are aerodynamics, propellers and electric power systems.
1
Table of Contents Introduction .................................................................................................................................................. 2
Measurement Conversion Tables ................................................................................................................. 3
Aircraft Lift and Drag ..................................................................................................................................... 4
Wing Pitching Moment (Torque) .................................................................................................................. 5
Angle of Attack .............................................................................................................................................. 6
Reynolds Number & Drag Estimating ........................................................................................................... 6
Fuselage Drag Estimating .......................................................................................................................... 6
Climb Rate & Angle of Climb ......................................................................................................................... 7
Wing Aerodynamic Center & Mean Chord ................................................................................................... 7
Air Density, Standard Atmosphere ............................................................................................................... 8
Air Foils .......................................................................................................................................................... 9
Flight Duration ............................................................................................................................................ 11
Center of Gravity and Neutral Point ........................................................................................................... 13
Propellers .................................................................................................................................................... 14
Propeller equations ............................................................................................................................. 16
Propeller Noise .................................................................................................................................... 18
Glow Engines and Matching Propellers ...................................................................................................... 19
Electric Power Systems ............................................................................................................................... 20
Battery Resistance .................................................................................................................................. 20
Electronic Speed Controls ....................................................................................................................... 21
ESC and Electric Motor Combined .......................................................................................................... 21
Relationships ........................................................................................................................................... 23
Newton’s Method Solution ..................................................................................................................... 26
Matching motor to prop & estimating flight performance at max throttle ............................................... 27
Bending Moment ........................................................................................................................................ 30
Stress Analysis ............................................................................................................................................. 31
2
Introduction Over the years I have collected a number of programs and descriptions related to the design and performance of RC model airplanes. They are scattered in various books, notebooks, document files and computer programs, making finding some particular subject sometimes a challenge. This document attempts to remedy that condition by assembling a lot of them in one place. It is limited to a set of subjects that are of most interest to the author. Topics included are various aspects of aerodynamics, propellers and electric power systems. There is a section on in-flight performance combining the aerodynamics and electric power system to estimate flight duration as a function of power setting as well as climb performance. The subjects are mostly presented without explanations as to their use or derivations. It is assumed the reader has some understanding of these subjects and does not need further explanations. Many of the explanations can be found in the literature, but there are a few that the author developed for a specific purpose. The section on in-flight performance was developed by the author and does contain some more detailed explanations. The application of the formulas and other information requires the use of a consistent set of measurement units. Any set can be used. Tables are included giving conversions from ft-lb-sec system to the metric system. The formulas and other types of numerical information are approximations to the real world. For instance, wing profile drag coefficients change with air speed and angle of attack but it is very difficult to include these changes in any straight forward analysis. The result is that there are differences between computed results and actual results that can be quite large. It makes no sense, then, to carry out computations to 3 decimal places when the actual results may be no better than no decimal places. There are three books that were especially helpful in understanding how models work and perform. #1: Lennon, Andy, “R/C Model Aircraft Design”, Air Age, Inc., 2002. The best source for detailed explanations of just about every RC airplane subject with math models for many of them. Much of the formulae in this document came from this source. #2: Simmons, Martin; “Model Aircraft Dynamics”, Fourth Edition, Special Interest Model Books, Dorset, UK, 2002. More qualitative than quantitative, many excellent chapters on the underlying principles of aerodynamics as applied to models. There is a large appendix devoted to airfoils and one with example calculations of aerodynamic properties. #3: Smith, H.C. ‘Skip”, “The Illustrated Guide to Aerodynamics”, 2nd Edition, 1992, Tab Books (McGraw Hill), This book was written for a private pilot so is written in a more general manner than the other books. It has lots of illustrations and photos that help in understanding the descriptions. It is a good starting book.
3
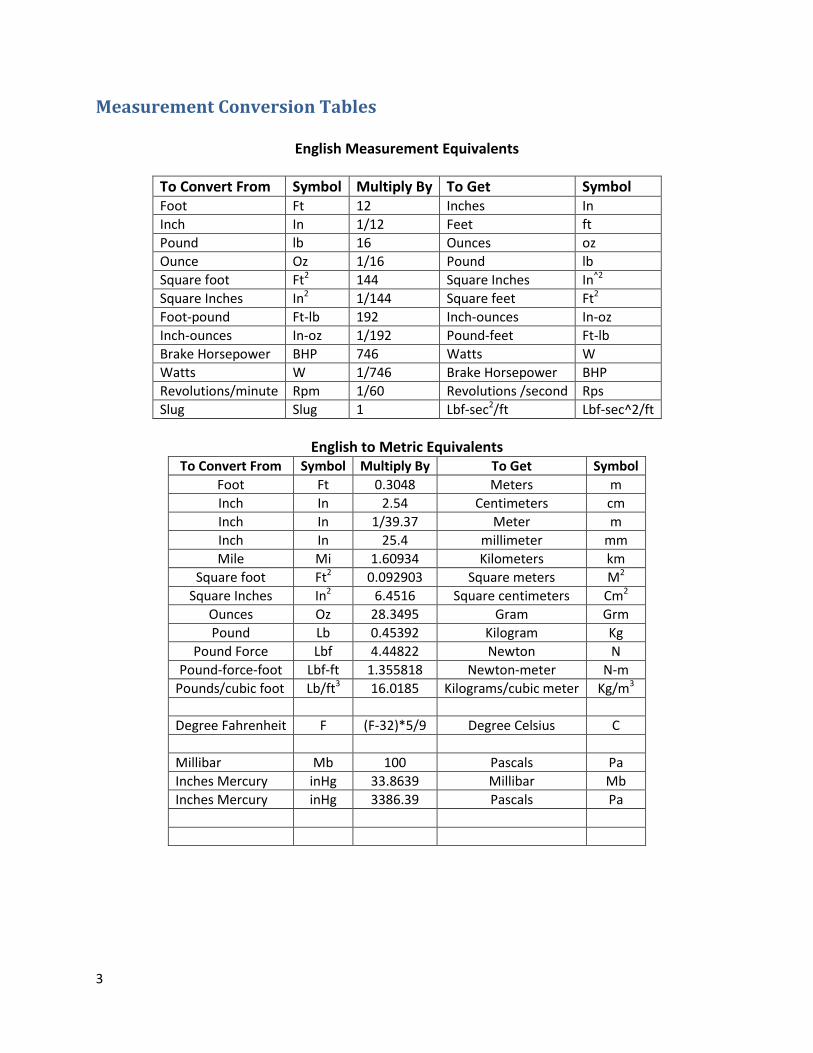
Measurement Conversion Tables
English Measurement Equivalents
To Convert From Symbol Multiply By To Get Symbol Foot Ft 12 Inches In
Inch In 1/12 Feet ft
Pound lb 16 Ounces oz
Ounce Oz 1/16 Pound lb
Square foot Ft2 144 Square Inches In^2
Square Inches In2 1/144 Square feet Ft2
Foot-pound Ft-lb 192 Inch-ounces In-oz
Inch-ounces In-oz 1/192 Pound-feet Ft-lb
Brake Horsepower BHP 746 Watts W
Watts W 1/746 Brake Horsepower BHP
Revolutions/minute Rpm 1/60 Revolutions /second Rps
Slug Slug 1 Lbf-sec2/ft Lbf-sec^2/ft
English to Metric Equivalents To Convert From Symbol Multiply By To Get Symbol
Foot Ft 0.3048 Meters m
Inch In 2.54 Centimeters cm
Inch In 1/39.37 Meter m
Inch In 25.4 millimeter mm
Mile Mi 1.60934 Kilometers km
Square foot Ft2 0.092903 Square meters M2
Square Inches In2 6.4516 Square centimeters Cm2
Ounces Oz 28.3495 Gram Grm
Pound Lb 0.45392 Kilogram Kg
Pound Force Lbf 4.44822 Newton N
Pound-force-foot Lbf-ft 1.355818 Newton-meter N-m
Pounds/cubic foot Lb/ft3 16.0185 Kilograms/cubic meter Kg/m3
Degree Fahrenheit F (F-32)*5/9 Degree Celsius C
Millibar Mb 100 Pascals Pa
Inches Mercury inHg 33.8639 Millibar Mb
Inches Mercury inHg 3386.39 Pascals Pa
4
Aircraft Lift and Drag
Symbol Description Metric Units British Units
b Wing Span m ft
Cl Lift Coefficient
Cdi Wing Induced Drag Coefficient
Cdw Wing Profile Drag Coefficient
Cdf Fuselage Drag Coefficient
Cdt Tail Drag Coefficient
g Gravity Constant 9.81 m/sec^2 32.2 ft/sec^2
h Height above sea level m ft
L Lift Force Kg-m/sec^2 Lb-ft/sec^2
Drag Drag Force Kg-m/sec^2 Lb-ft/sec^2
W Mass Kg Lb
P Power, Watts Kg-m^2/sec^3 1.356*Lb-ft^2/sec^3
V Air Speed m/sec ft/sec
Sw Wing Area m^2 ft^2
Sf Fuselage Effective Drag Area m^2 ft^2
St Tail Area m^2 ft^2
ρo Air Density at Sea Level 1.225 Kg/m^3 0.00765 Lb/ft^3
σ Air Density Correction for Height Above Sea Level
1-8.245E-05*h 1-2.519e-05*h
ρ Air Density = ρo*σ Kg/m^3 Lb/ft^3
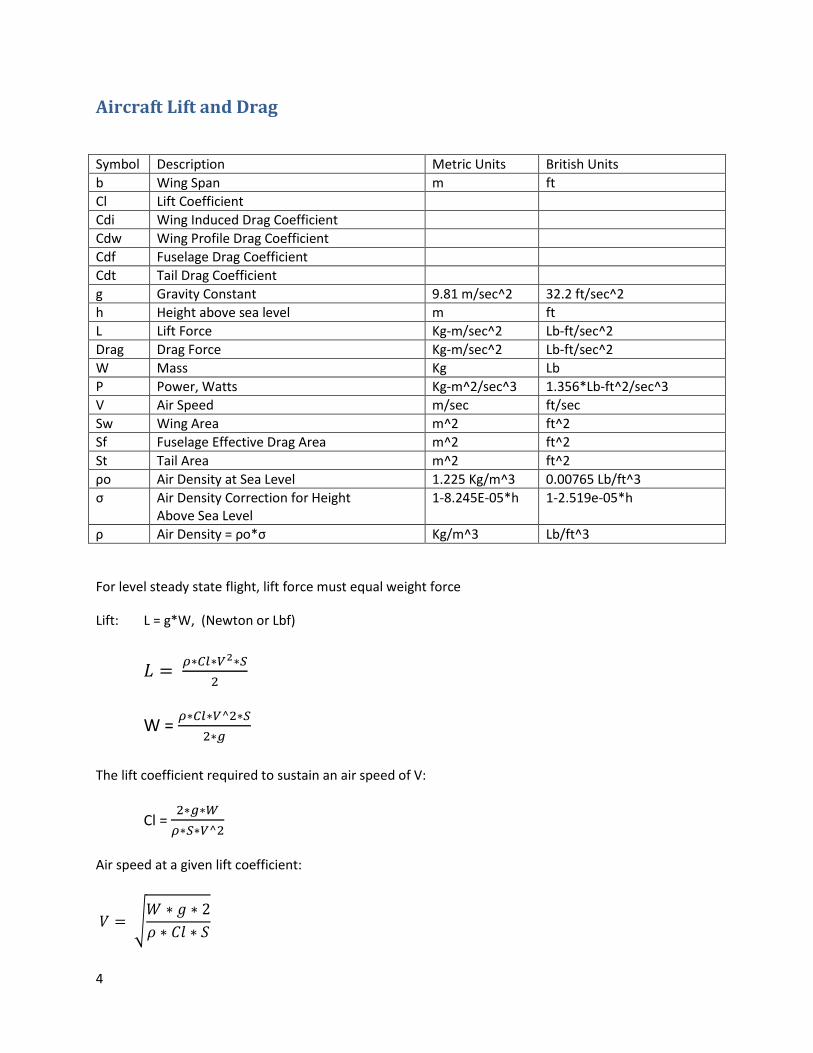
For level steady state flight, lift force must equal weight force
Lift: L = g*W, (Newton or Lbf)
W =
The lift coefficient required to sustain an air speed of V:
Cl =
Air speed at a given lift coefficient:
√
5
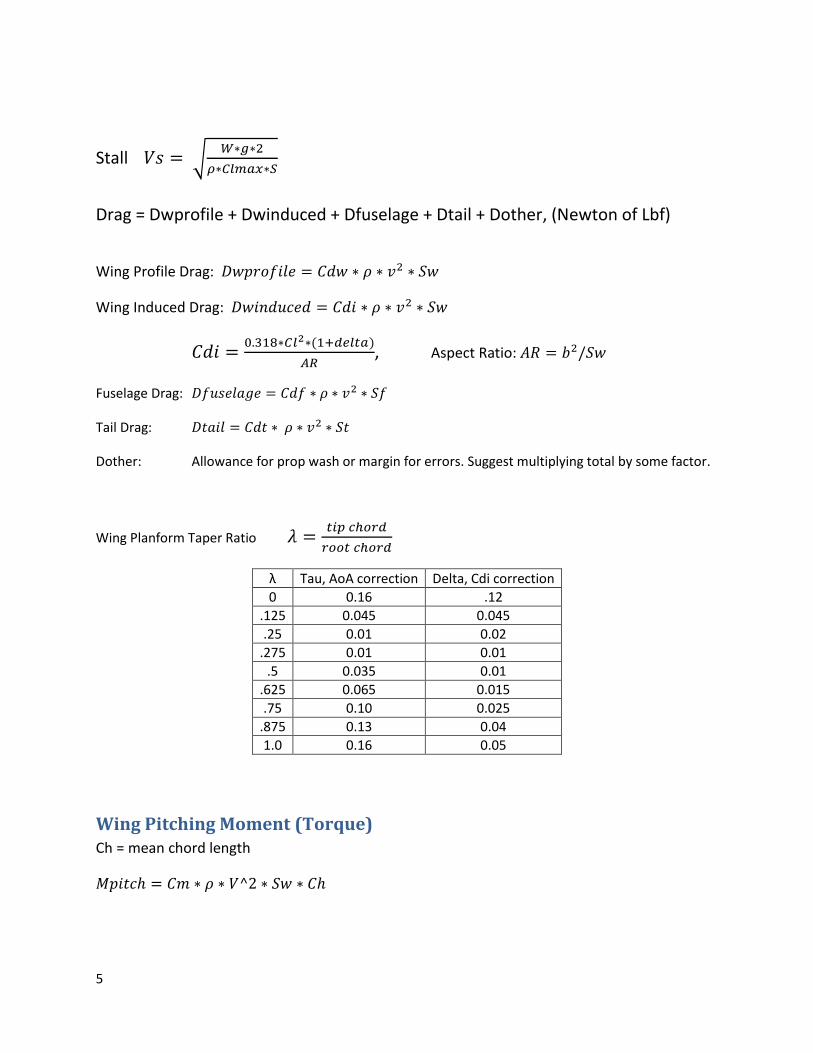
Stall √
Drag = Dwprofile + Dwinduced + Dfuselage + Dtail + Dother, (Newton of Lbf)
Wing Profile Drag:
Wing Induced Drag:
, Aspect Ratio:
Fuselage Drag:
Tail Drag:
Dother: Allowance for prop wash or margin for errors. Suggest multiplying total by some factor.
Wing Planform Taper Ratio
λ Tau, AoA correction Delta, Cdi correction
0 0.16 .12
.125 0.045 0.045
.25 0.01 0.02
.275 0.01 0.01
.5 0.035 0.01
.625 0.065 0.015
.75 0.10 0.025
.875 0.13 0.04
1.0 0.16 0.05
Wing Pitching Moment (Torque) Ch = mean chord length
6
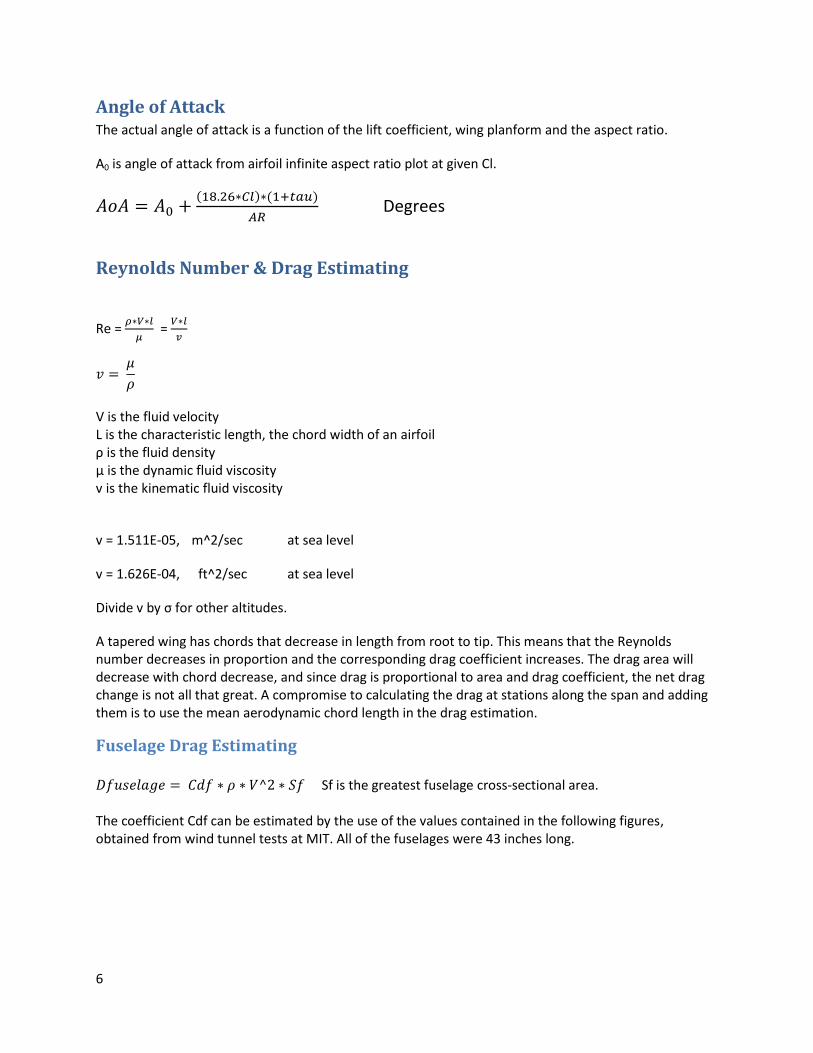
Angle of Attack The actual angle of attack is a function of the lift coefficient, wing planform and the aspect ratio.
Α0 is angle of attack from airfoil infinite aspect ratio plot at given Cl.
Degrees
Reynolds Number & Drag Estimating
Re =
=
V is the fluid velocity L is the characteristic length, the chord width of an airfoil ρ is the fluid density μ is the dynamic fluid viscosity v is the kinematic fluid viscosity
v = 1.511E-05, m^2/sec at sea level
v = 1.626E-04, ft^2/sec at sea level
Divide v by σ for other altitudes.
A tapered wing has chords that decrease in length from root to tip. This means that the Reynolds number decreases in proportion and the corresponding drag coefficient increases. The drag area will decrease with chord decrease, and since drag is proportional to area and drag coefficient, the net drag change is not all that great. A compromise to calculating the drag at stations along the span and adding them is to use the mean aerodynamic chord length in the drag estimation.
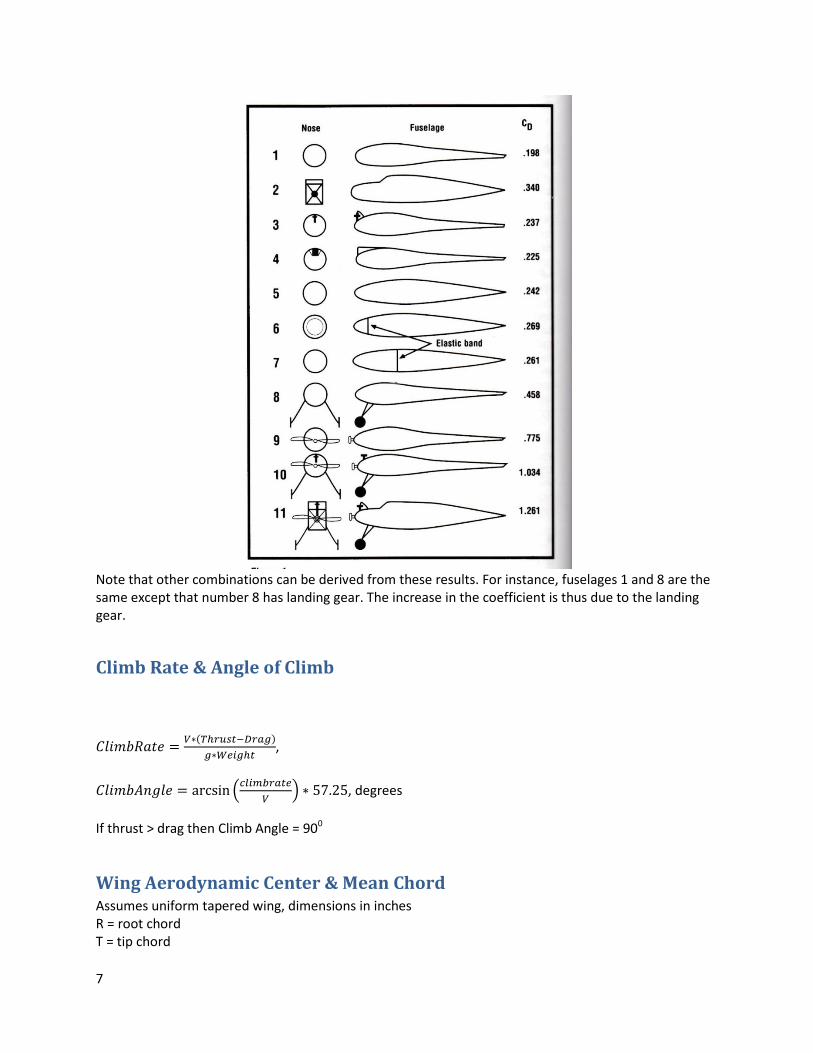
Fuselage Drag Estimating Sf is the greatest fuselage cross-sectional area. The coefficient Cdf can be estimated by the use of the values contained in the following figures, obtained from wind tunnel tests at MIT. All of the fuselages were 43 inches long.
7
Note that other combinations can be derived from these results. For instance, fuselages 1 and 8 are the same except that number 8 has landing gear. The increase in the coefficient is thus due to the landing gear.
Climb Rate & Angle of Climb
,
(
) , degrees
If thrust > drag then Climb Angle = 900
Wing Aerodynamic Center & Mean Chord Assumes uniform tapered wing, dimensions in inches R = root chord T = tip chord
8
Span = distance from root to tip (half of total wing span) Sweep = distance tip leading edge is swept back from root leading edge MAC = mean aerodynamic chord AC = aerodynamic center measured from root leading edge
(area of wing half)
Air Density, Standard Atmosphere Assumes standard temperature and pressure conditions at sea level. There is no allowance for actual
temperature or water vapor-caused variations.
po = sea level standard atmospheric pressure, 101.325 kPa
To = sea level standard temperature, 288.15 K
g = earth surface gravitational acceleration, 9.80665 m/s2
L = Temperature lapse rate, 0.0065, K/m
R = Ideal gas constant, 8.31447 J/(mol-K)
M = molar mass of dry air, 0.0289644 kg/mol
Temperature at altitude h meters above sea level:
T = To – L*h
The pressure at altitude h is given by:
(
)
Density then is found to be:
Kg/m3
9
This set of equations is essentially linear with altitude.
,Kg/m3
σ =
= 1- 8.24E-05*hmeter
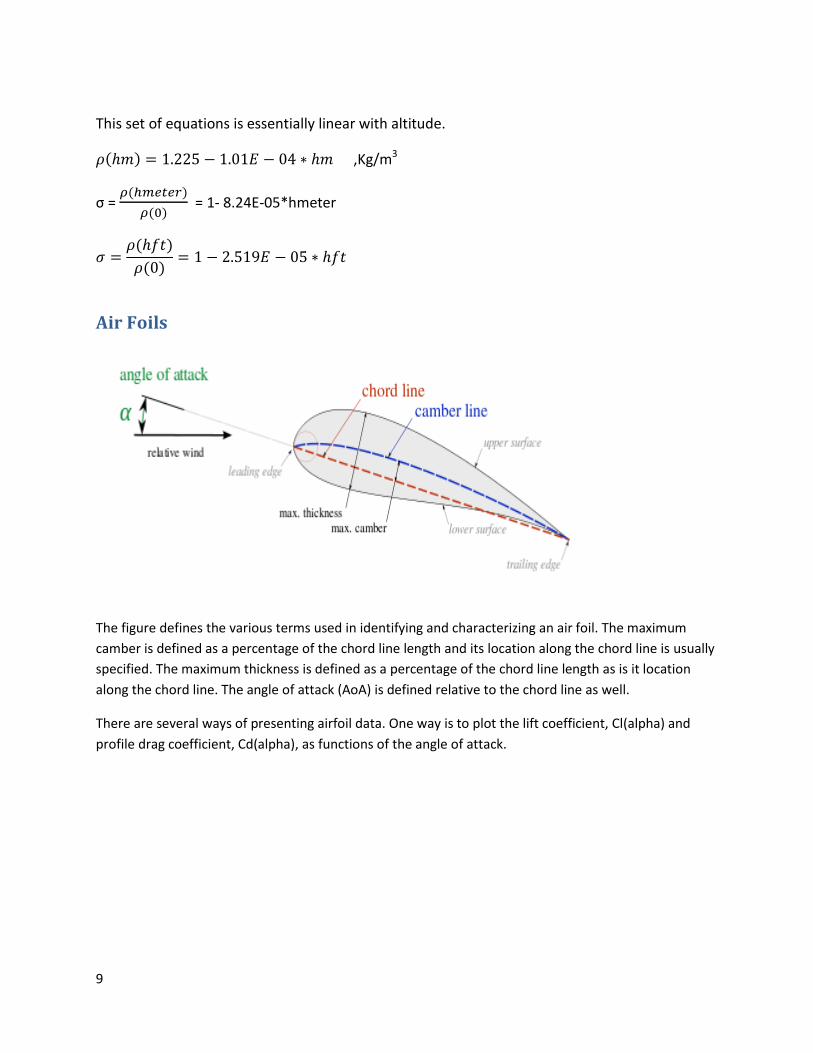
Air Foils
The figure defines the various terms used in identifying and characterizing an air foil. The maximum
camber is defined as a percentage of the chord line length and its location along the chord line is usually
specified. The maximum thickness is defined as a percentage of the chord line length as is it location
along the chord line. The angle of attack (AoA) is defined relative to the chord line as well.
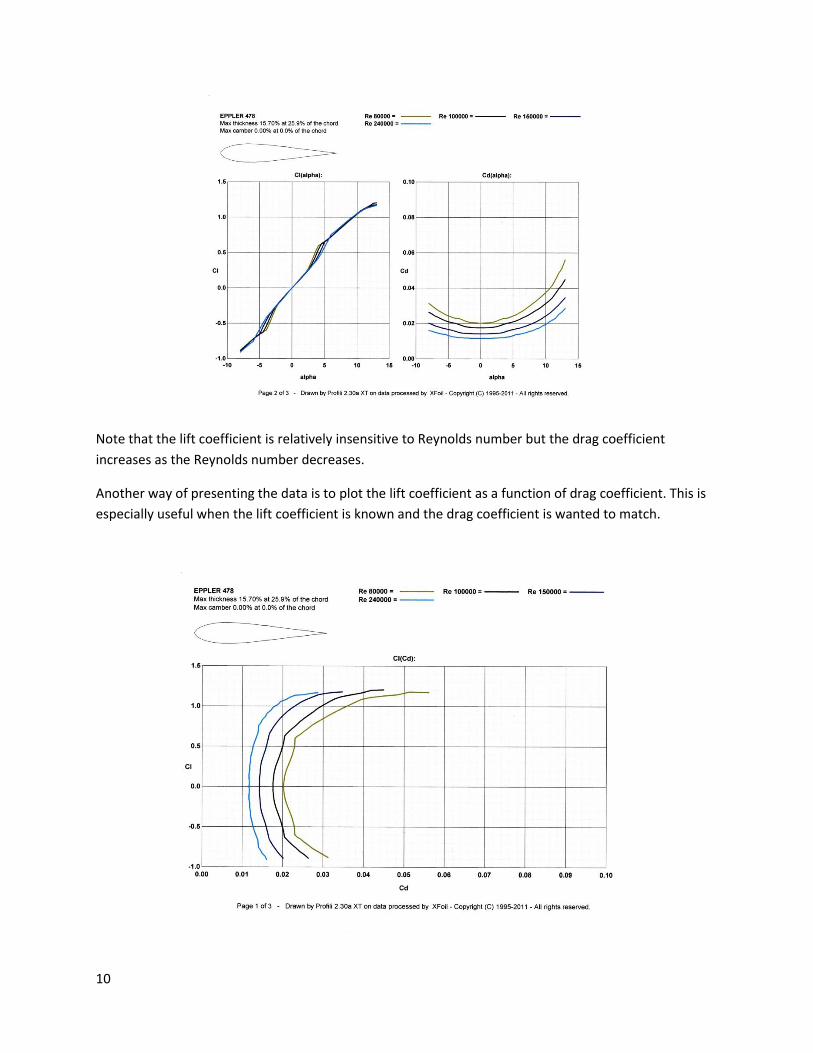
There are several ways of presenting airfoil data. One way is to plot the lift coefficient, Cl(alpha) and
profile drag coefficient, Cd(alpha), as functions of the angle of attack.
10
Note that the lift coefficient is relatively insensitive to Reynolds number but the drag coefficient
increases as the Reynolds number decreases.
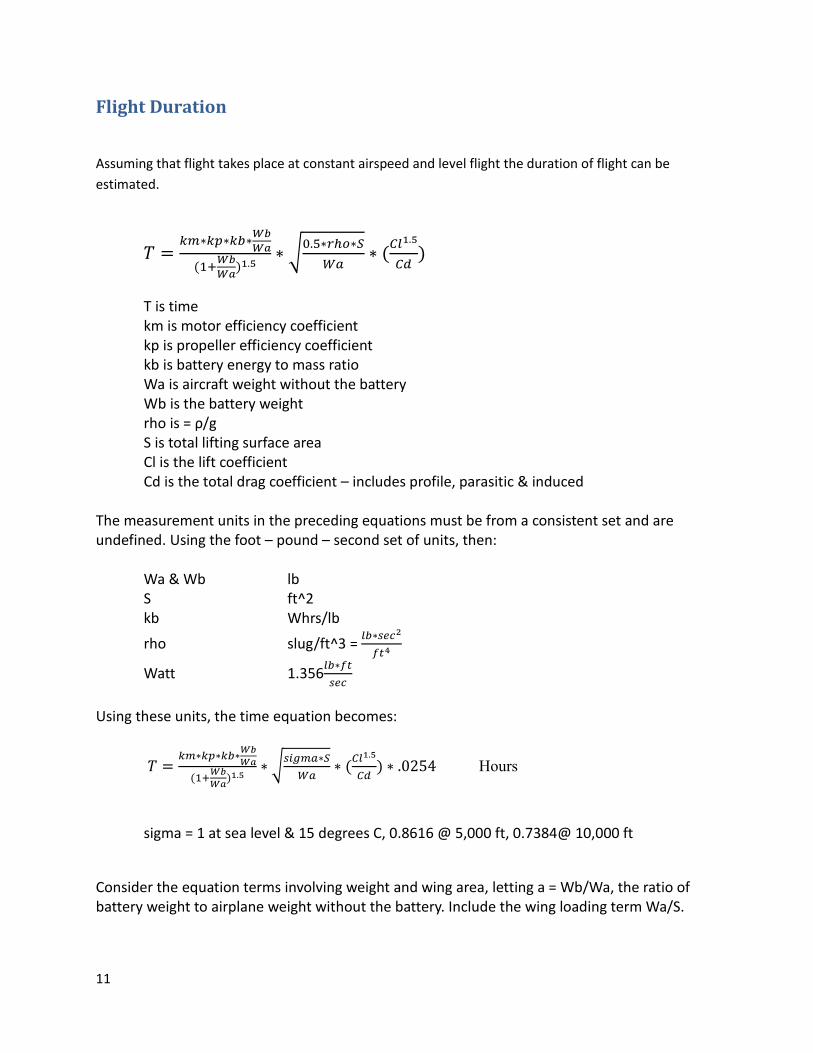
Another way of presenting the data is to plot the lift coefficient as a function of drag coefficient. This is
especially useful when the lift coefficient is known and the drag coefficient is wanted to match.
11
Flight Duration
Assuming that flight takes place at constant airspeed and level flight the duration of flight can be
estimated.
𝑘 𝑘 𝑘
𝑊𝑏
𝑊𝑎
𝑊𝑏
𝑊𝑎 1 5
√ 5
1 5
T is time km is motor efficiency coefficient kp is propeller efficiency coefficient kb is battery energy to mass ratio Wa is aircraft weight without the battery Wb is the battery weight rho is = ρ/g S is total lifting surface area Cl is the lift coefficient Cd is the total drag coefficient – includes profile, parasitic & induced The measurement units in the preceding equations must be from a consistent set and are undefined. Using the foot – pound – second set of units, then: Wa & Wb lb S ft^2 kb Whrs/lb
rho slug/ft^3 =
𝑓 4
Watt 1.356 𝑓
Using these units, the time equation becomes:
𝑘 𝑘 𝑘
𝑊𝑏
𝑊𝑎
𝑊𝑏
𝑊𝑎 1 5
√
1 5
Hours
sigma = 1 at sea level & 15 degrees C, 0.8616 @ 5,000 ft, 0.7384@ 10,000 ft
Consider the equation terms involving weight and wing area, letting a = Wb/Wa, the ratio of battery weight to airplane weight without the battery. Include the wing loading term Wa/S.
12
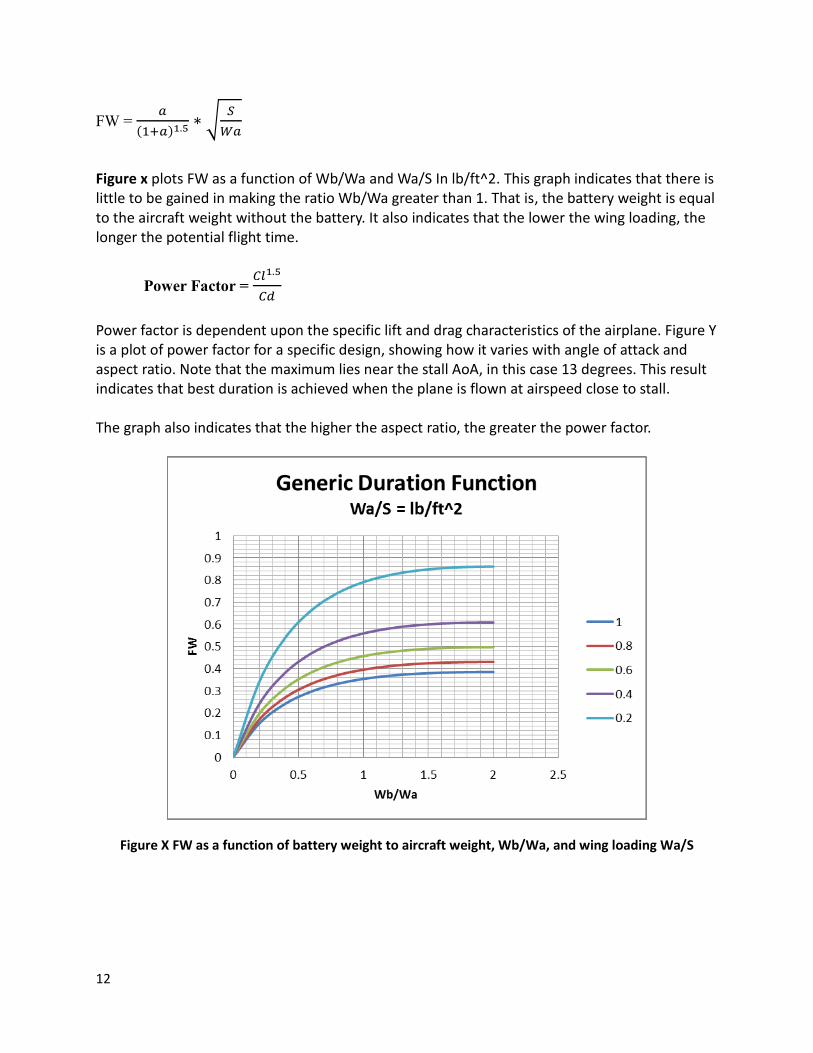
FW =
1 5 √
Figure x plots FW as a function of Wb/Wa and Wa/S In lb/ft^2. This graph indicates that there is little to be gained in making the ratio Wb/Wa greater than 1. That is, the battery weight is equal to the aircraft weight without the battery. It also indicates that the lower the wing loading, the longer the potential flight time.
Power Factor = 1 5
Power factor is dependent upon the specific lift and drag characteristics of the airplane. Figure Y is a plot of power factor for a specific design, showing how it varies with angle of attack and aspect ratio. Note that the maximum lies near the stall AoA, in this case 13 degrees. This result indicates that best duration is achieved when the plane is flown at airspeed close to stall. The graph also indicates that the higher the aspect ratio, the greater the power factor.
Figure X FW as a function of battery weight to aircraft weight, Wb/Wa, and wing loading Wa/S

13
Figure Y Power factor example
Center of Gravity and Neutral Point
14
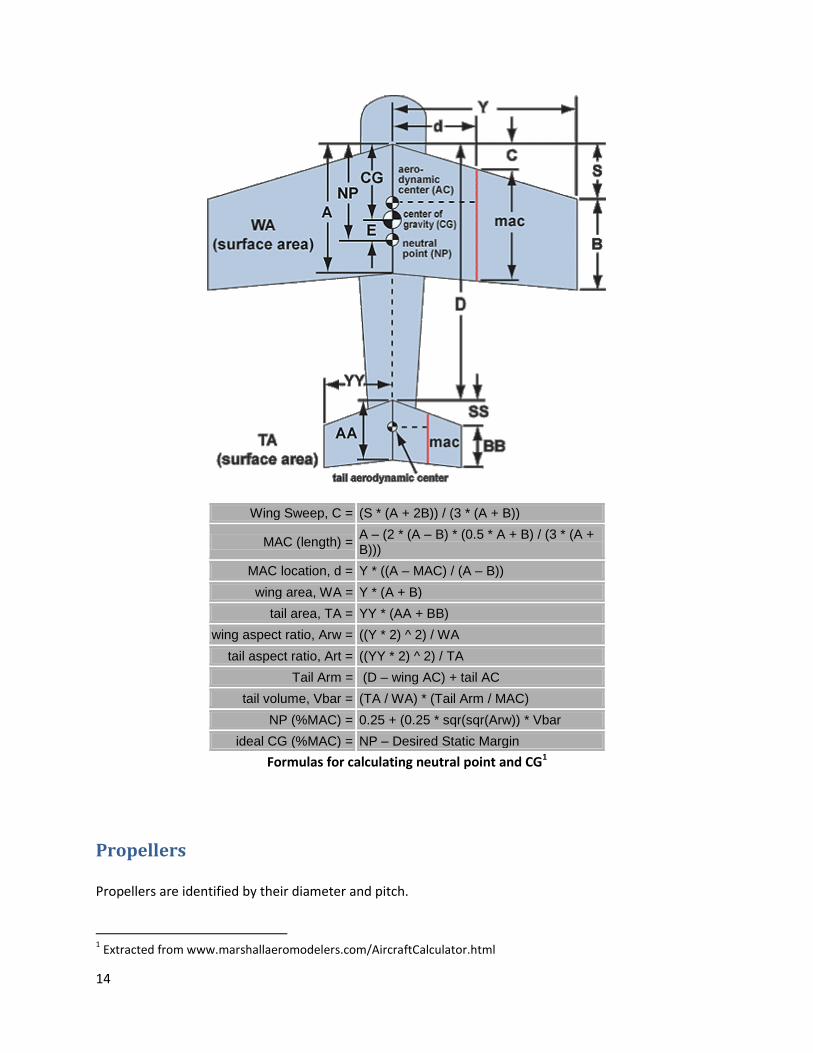
Wing Sweep, C = (S * (A + 2B)) / (3 * (A + B))
MAC (length) = A – (2 * (A – B) * (0.5 * A + B) / (3 * (A + B)))
MAC location, d = Y * ((A – MAC) / (A – B))
wing area, WA = Y * (A + B)
tail area, TA = YY * (AA + BB)
wing aspect ratio, Arw = ((Y * 2) ^ 2) / WA
tail aspect ratio, Art = ((YY * 2) ^ 2) / TA
Tail Arm = (D – wing AC) + tail AC
tail volume, Vbar = (TA / WA) * (Tail Arm / MAC)
NP (%MAC) = 0.25 + (0.25 * sqr(sqr(Arw)) * Vbar
ideal CG (%MAC) = NP – Desired Static Margin
Formulas for calculating neutral point and CG1
Propellers Propellers are identified by their diameter and pitch.
1 Extracted from www.marshallaeromodelers.com/AircraftCalculator.html
15
Pitch is the hypothetical distance forward a propeller would advance in one revolution if there were no
slippage.
Pitch is measured relative to the chord line, normally at 70 to 75% of the blade radius.
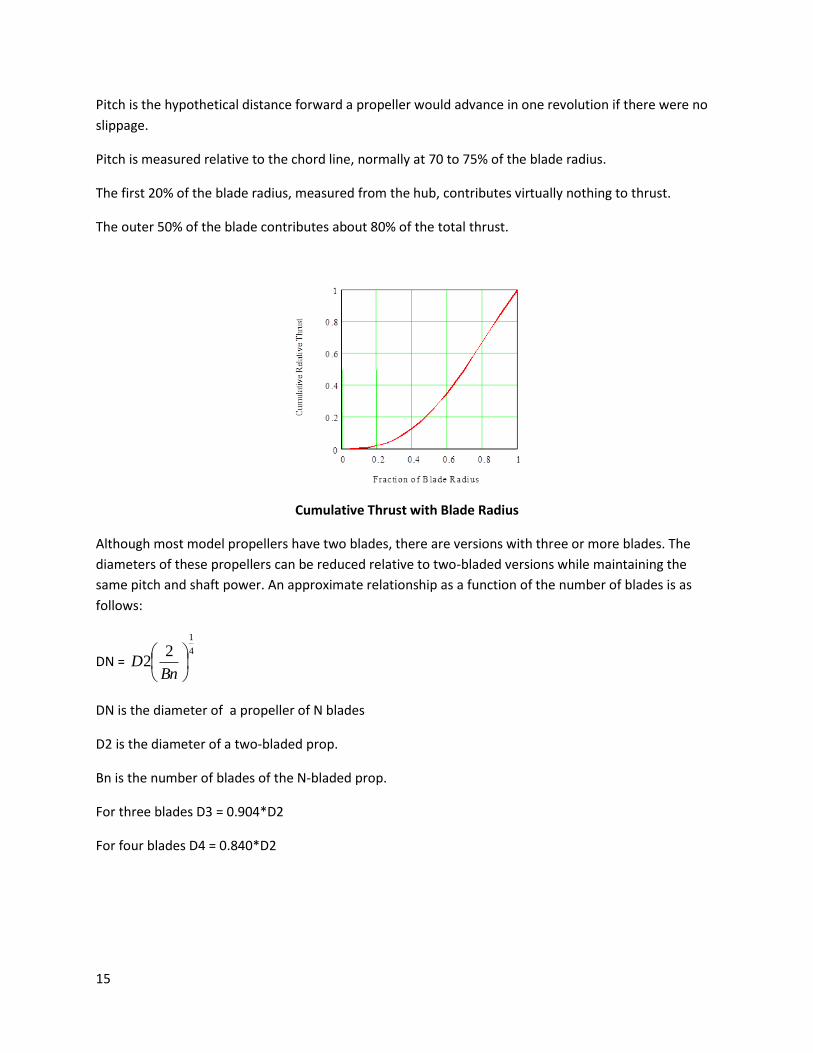
The first 20% of the blade radius, measured from the hub, contributes virtually nothing to thrust.
The outer 50% of the blade contributes about 80% of the total thrust.
Cumulative Thrust with Blade Radius
Although most model propellers have two blades, there are versions with three or more blades. The
diameters of these propellers can be reduced relative to two-bladed versions while maintaining the
same pitch and shaft power. An approximate relationship as a function of the number of blades is as
follows:
DN = 4
1
22
BnD
DN is the diameter of a propeller of N blades
D2 is the diameter of a two-bladed prop.
Bn is the number of blades of the N-bladed prop.
For three blades D3 = 0.904*D2
For four blades D4 = 0.840*D2
16
Propeller equations
Advance Ratio JnD
V
Where V is the axial or forward velocity of the propeller, n is the revolution rate D is the diameter. A consistent set of units such as ft/sec, rev/sec and ft are required. J is dimensionless. J is an indirect
measure of the angle at the blade tip.
Thrust: T= 42 DnCt
is air density
n is the revolution rate in rps D is the diameter Ct is the thrust coefficient. It is a function of pitch, diameter, rpm, forward velocity, and blade shape.
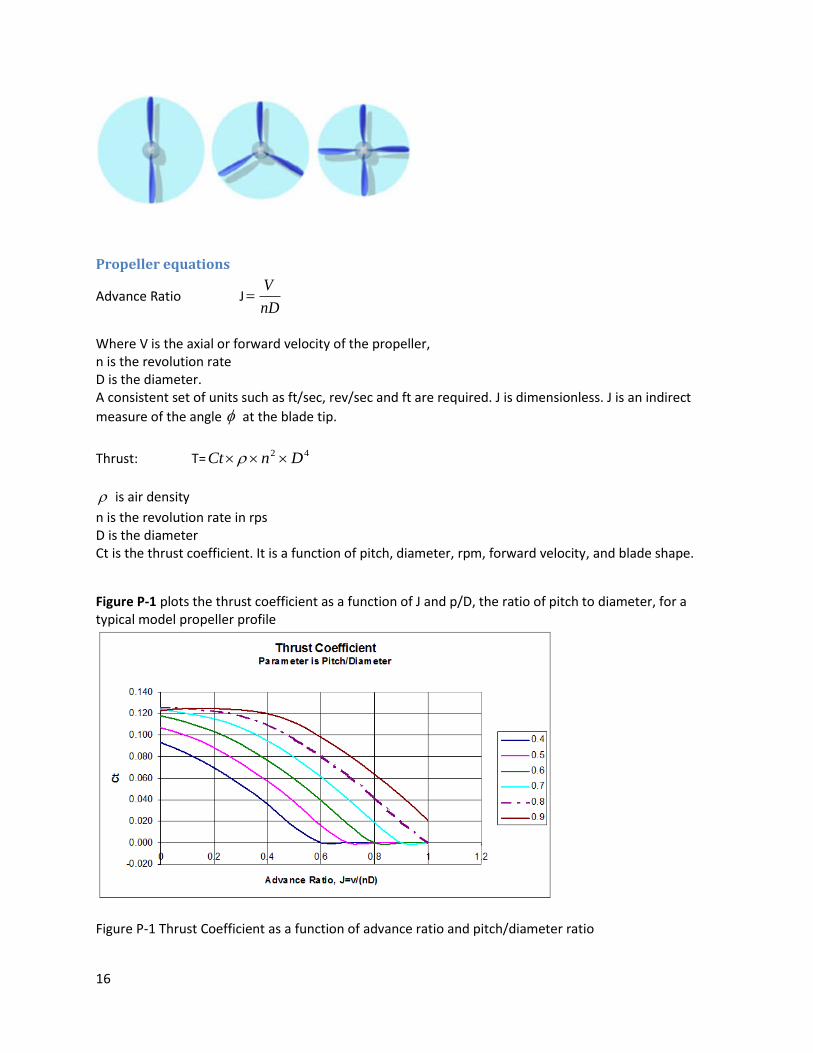
Figure P-1 plots the thrust coefficient as a function of J and p/D, the ratio of pitch to diameter, for a typical model propeller profile
Figure P-1 Thrust Coefficient as a function of advance ratio and pitch/diameter ratio
17
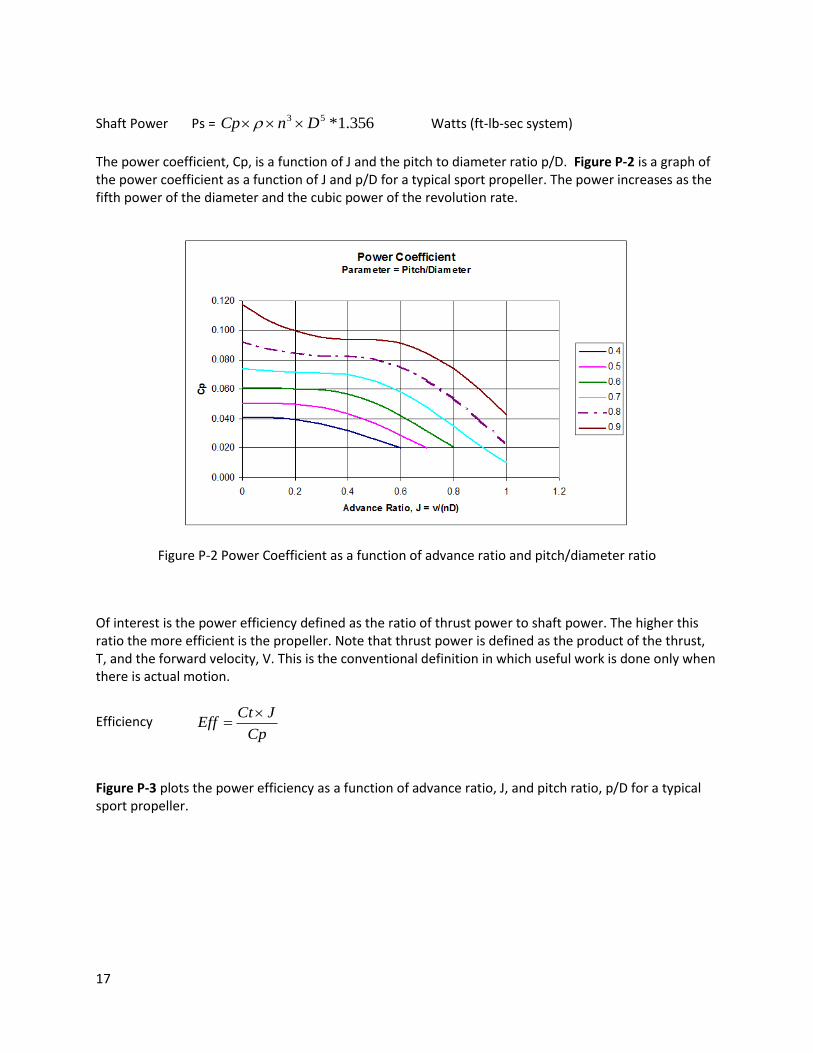
Shaft Power Ps = 356.1*53 DnCp Watts (ft-lb-sec system)
The power coefficient, Cp, is a function of J and the pitch to diameter ratio p/D. Figure P-2 is a graph of the power coefficient as a function of J and p/D for a typical sport propeller. The power increases as the fifth power of the diameter and the cubic power of the revolution rate.
Figure P-2 Power Coefficient as a function of advance ratio and pitch/diameter ratio
Of interest is the power efficiency defined as the ratio of thrust power to shaft power. The higher this ratio the more efficient is the propeller. Note that thrust power is defined as the product of the thrust, T, and the forward velocity, V. This is the conventional definition in which useful work is done only when there is actual motion.
Efficiency Cp
JCtEff
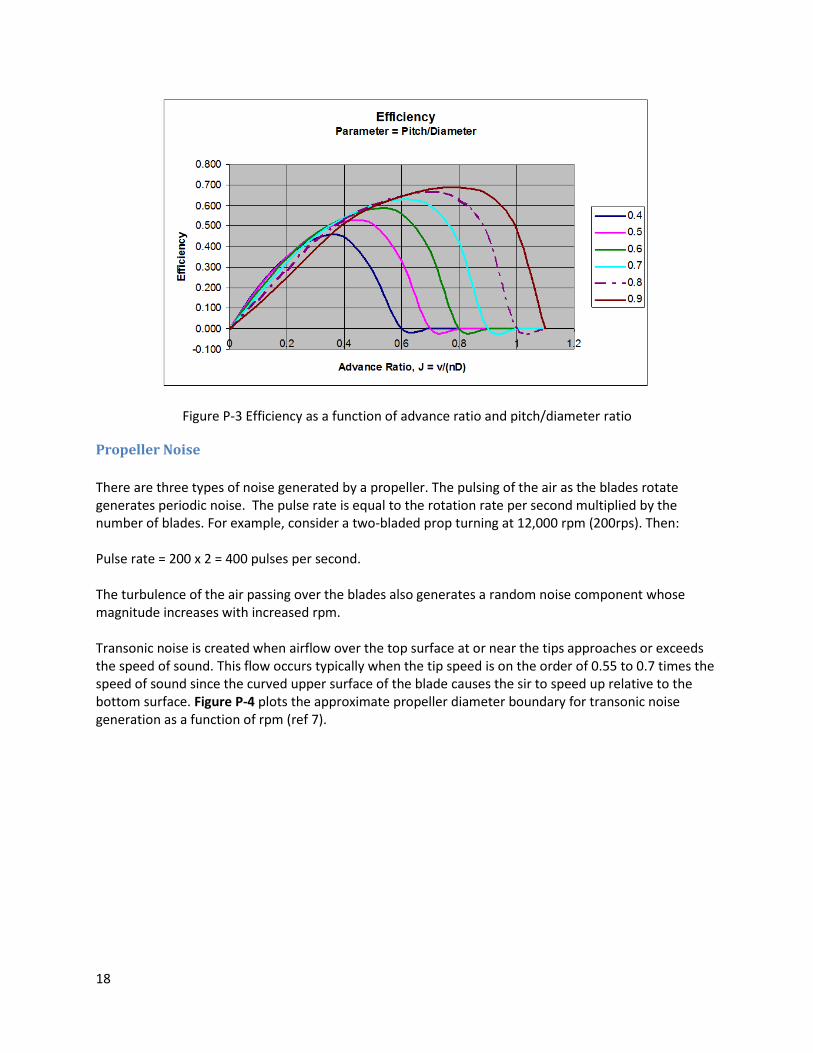
Figure P-3 plots the power efficiency as a function of advance ratio, J, and pitch ratio, p/D for a typical sport propeller.
18
Figure P-3 Efficiency as a function of advance ratio and pitch/diameter ratio
Propeller Noise
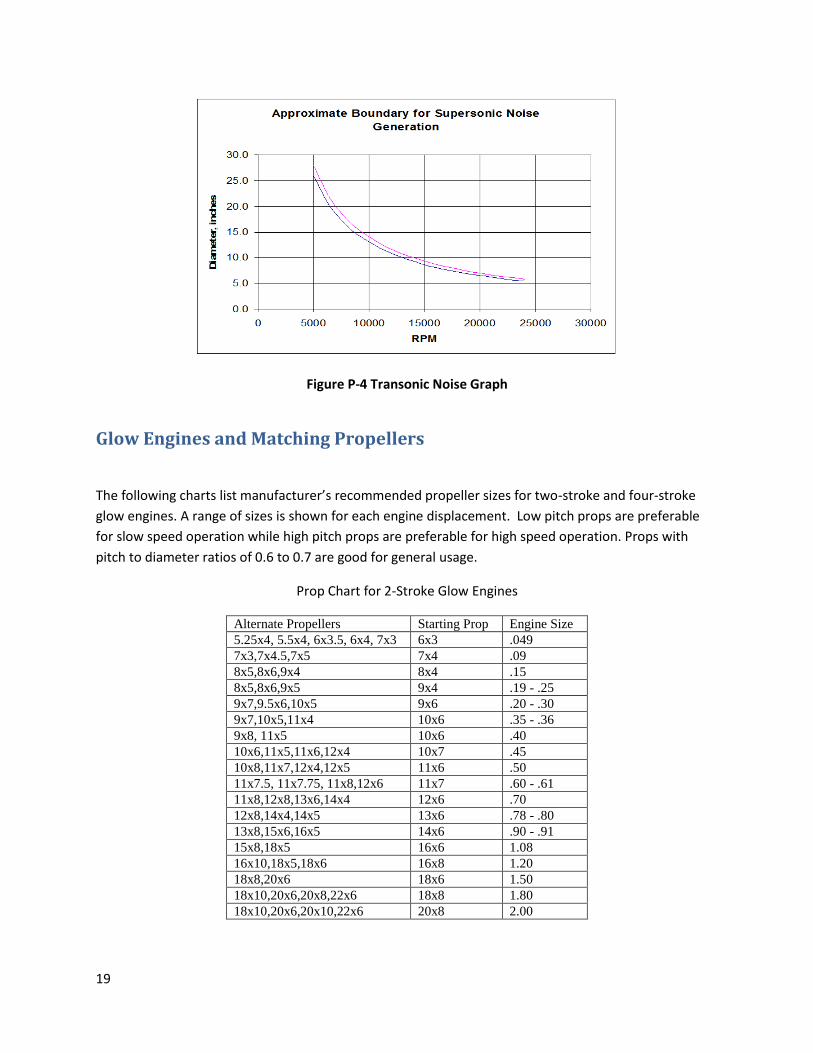
There are three types of noise generated by a propeller. The pulsing of the air as the blades rotate generates periodic noise. The pulse rate is equal to the rotation rate per second multiplied by the number of blades. For example, consider a two-bladed prop turning at 12,000 rpm (200rps). Then: Pulse rate = 200 x 2 = 400 pulses per second. The turbulence of the air passing over the blades also generates a random noise component whose magnitude increases with increased rpm. Transonic noise is created when airflow over the top surface at or near the tips approaches or exceeds the speed of sound. This flow occurs typically when the tip speed is on the order of 0.55 to 0.7 times the speed of sound since the curved upper surface of the blade causes the sir to speed up relative to the bottom surface. Figure P-4 plots the approximate propeller diameter boundary for transonic noise generation as a function of rpm (ref 7).
19
Figure P-4 Transonic Noise Graph
Glow Engines and Matching Propellers
The following charts list manufacturer’s recommended propeller sizes for two-stroke and four-stroke
glow engines. A range of sizes is shown for each engine displacement. Low pitch props are preferable
for slow speed operation while high pitch props are preferable for high speed operation. Props with
pitch to diameter ratios of 0.6 to 0.7 are good for general usage.
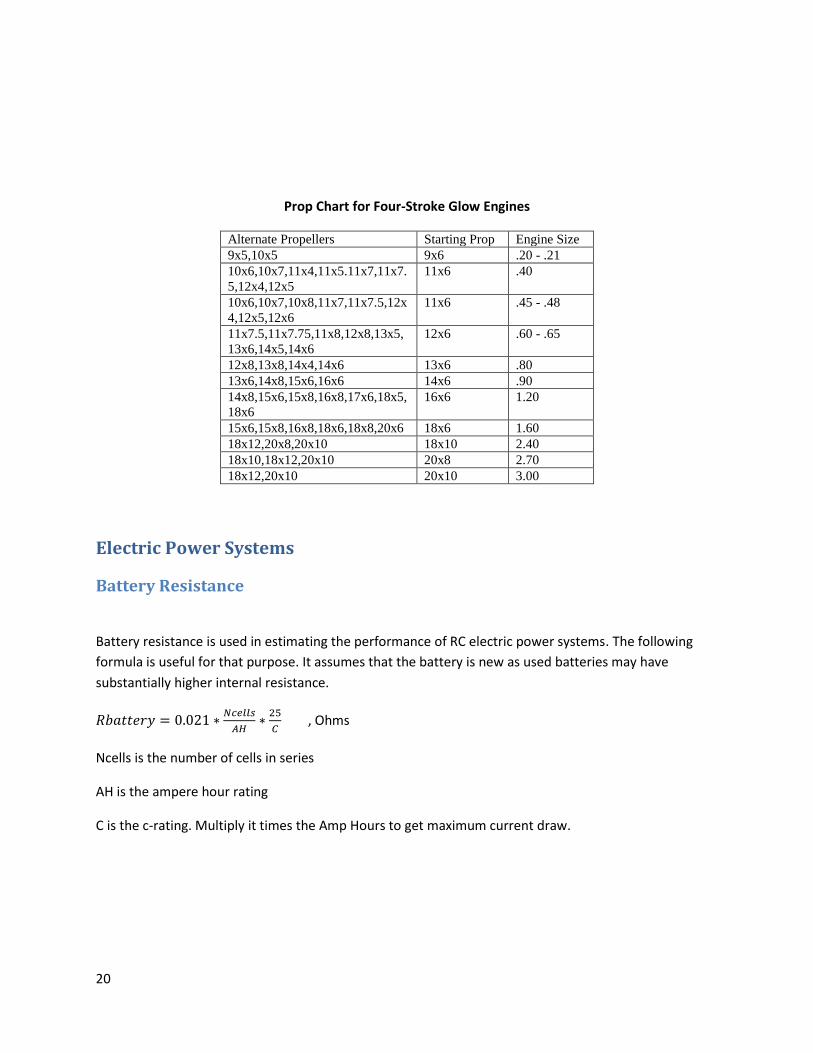
Prop Chart for 2-Stroke Glow Engines
Alternate Propellers Starting Prop Engine Size
5.25x4, 5.5x4, 6x3.5, 6x4, 7x3 6x3 .049
7x3,7x4.5,7x5 7x4 .09
8x5,8x6,9x4 8x4 .15
8x5,8x6,9x5 9x4 .19 - .25
9x7,9.5x6,10x5 9x6 .20 - .30
9x7,10x5,11x4 10x6 .35 - .36
9x8, 11x5 10x6 .40
10x6,11x5,11x6,12x4 10x7 .45
10x8,11x7,12x4,12x5 11x6 .50
11x7.5, 11x7.75, 11x8,12x6 11x7 .60 - .61
11x8,12x8,13x6,14x4 12x6 .70
12x8,14x4,14x5 13x6 .78 - .80
13x8,15x6,16x5 14x6 .90 - .91
15x8,18x5 16x6 1.08
16x10,18x5,18x6 16x8 1.20
18x8,20x6 18x6 1.50
18x10,20x6,20x8,22x6 18x8 1.80
18x10,20x6,20x10,22x6 20x8 2.00
20
Prop Chart for Four-Stroke Glow Engines
Alternate Propellers Starting Prop Engine Size
9x5,10x5 9x6 .20 - .21
10x6,10x7,11x4,11x5.11x7,11x7.
5,12x4,12x5
11x6 .40
10x6,10x7,10x8,11x7,11x7.5,12x
4,12x5,12x6
11x6 .45 - .48
11x7.5,11x7.75,11x8,12x8,13x5,
13x6,14x5,14x6
12x6 .60 - .65
12x8,13x8,14x4,14x6 13x6 .80
13x6,14x8,15x6,16x6 14x6 .90
14x8,15x6,15x8,16x8,17x6,18x5,
18x6
16x6 1.20
15x6,15x8,16x8,18x6,18x8,20x6 18x6 1.60
18x12,20x8,20x10 18x10 2.40
18x10,18x12,20x10 20x8 2.70
18x12,20x10 20x10 3.00
Electric Power Systems
Battery Resistance
Battery resistance is used in estimating the performance of RC electric power systems. The following
formula is useful for that purpose. It assumes that the battery is new as used batteries may have
substantially higher internal resistance.
5
, Ohms
Ncells is the number of cells in series
AH is the ampere hour rating
C is the c-rating. Multiply it times the Amp Hours to get maximum current draw.
21
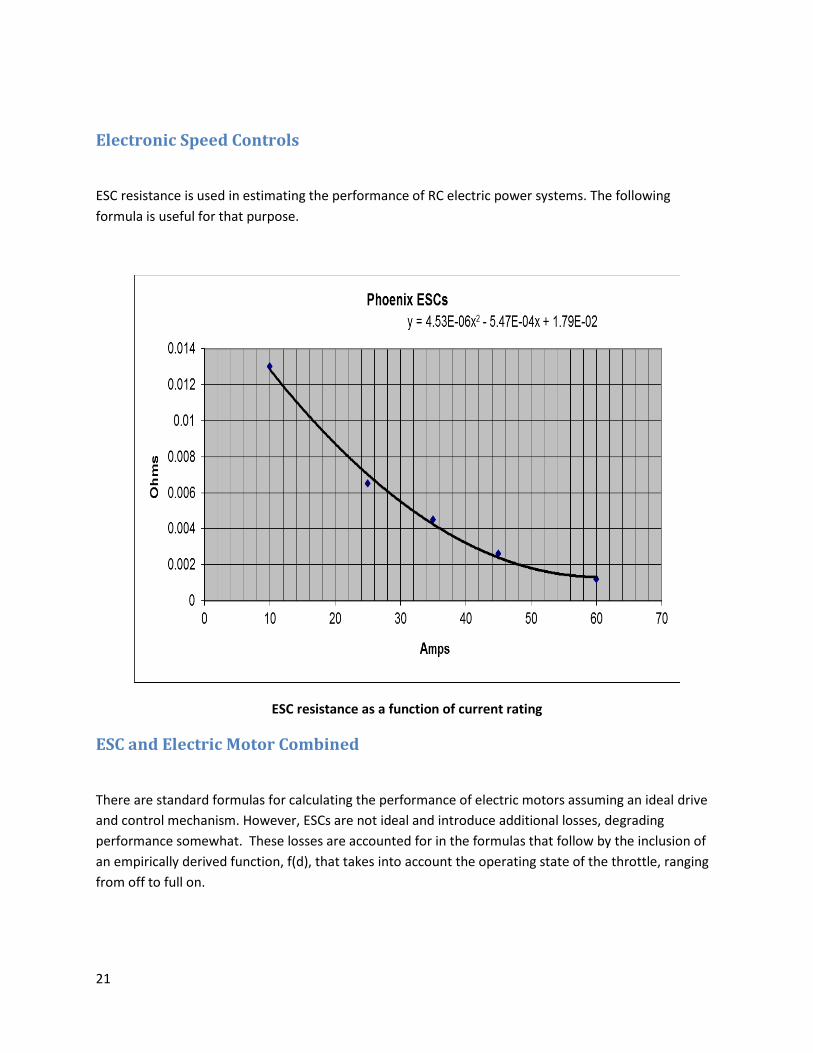
Electronic Speed Controls
ESC resistance is used in estimating the performance of RC electric power systems. The following
formula is useful for that purpose.
ESC resistance as a function of current rating
ESC and Electric Motor Combined
There are standard formulas for calculating the performance of electric motors assuming an ideal drive
and control mechanism. However, ESCs are not ideal and introduce additional losses, degrading
performance somewhat. These losses are accounted for in the formulas that follow by the inclusion of
an empirically derived function, f(d), that takes into account the operating state of the throttle, ranging
from off to full on.
22
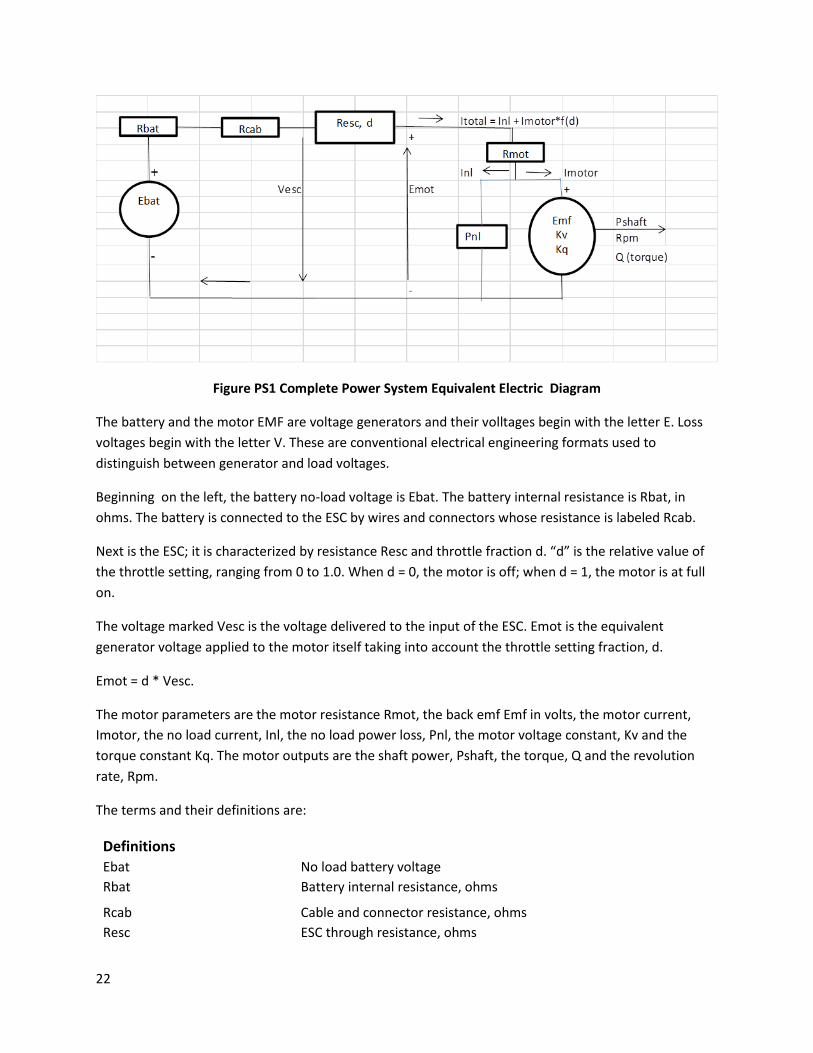
Figure PS1 Complete Power System Equivalent Electric Diagram
The battery and the motor EMF are voltage generators and their volltages begin with the letter E. Loss
voltages begin with the letter V. These are conventional electrical engineering formats used to
distinguish between generator and load voltages.
Beginning on the left, the battery no-load voltage is Ebat. The battery internal resistance is Rbat, in
ohms. The battery is connected to the ESC by wires and connectors whose resistance is labeled Rcab.
Next is the ESC; it is characterized by resistance Resc and throttle fraction d. “d” is the relative value of
the throttle setting, ranging from 0 to 1.0. When d = 0, the motor is off; when d = 1, the motor is at full
on.
The voltage marked Vesc is the voltage delivered to the input of the ESC. Emot is the equivalent
generator voltage applied to the motor itself taking into account the throttle setting fraction, d.
Emot = d * Vesc.
The motor parameters are the motor resistance Rmot, the back emf Emf in volts, the motor current,
Imotor, the no load current, Inl, the no load power loss, Pnl, the motor voltage constant, Kv and the
torque constant Kq. The motor outputs are the shaft power, Pshaft, the torque, Q and the revolution
rate, Rpm.
The terms and their definitions are:
Definitions Ebat
No load battery voltage
Rbat
Battery internal resistance, ohms
Rcab Cable and connector resistance, ohms
Resc
ESC through resistance, ohms
23
Rmot
Motor internal resistance, ohms
Pnl
Motor power loss due to internal non resistive causes
Emf
Motor back EMF, opposed to the battery voltage, volts
Pshaft
Power output through the motor shaft
Kv
Motor rpm per volt
Io
no load reference current at Vo
Vo
no load reference voltage
Inl
Motor no load current, Amps
Imot
Motor current transferring power to the output shaft, Amps
d Fraction of full throttle setting, range 0 to 1.0
Emot
The source voltage driving the motor from the ESC, Volts
Relationships
There are some relationships that are common to all working formulas that follow.
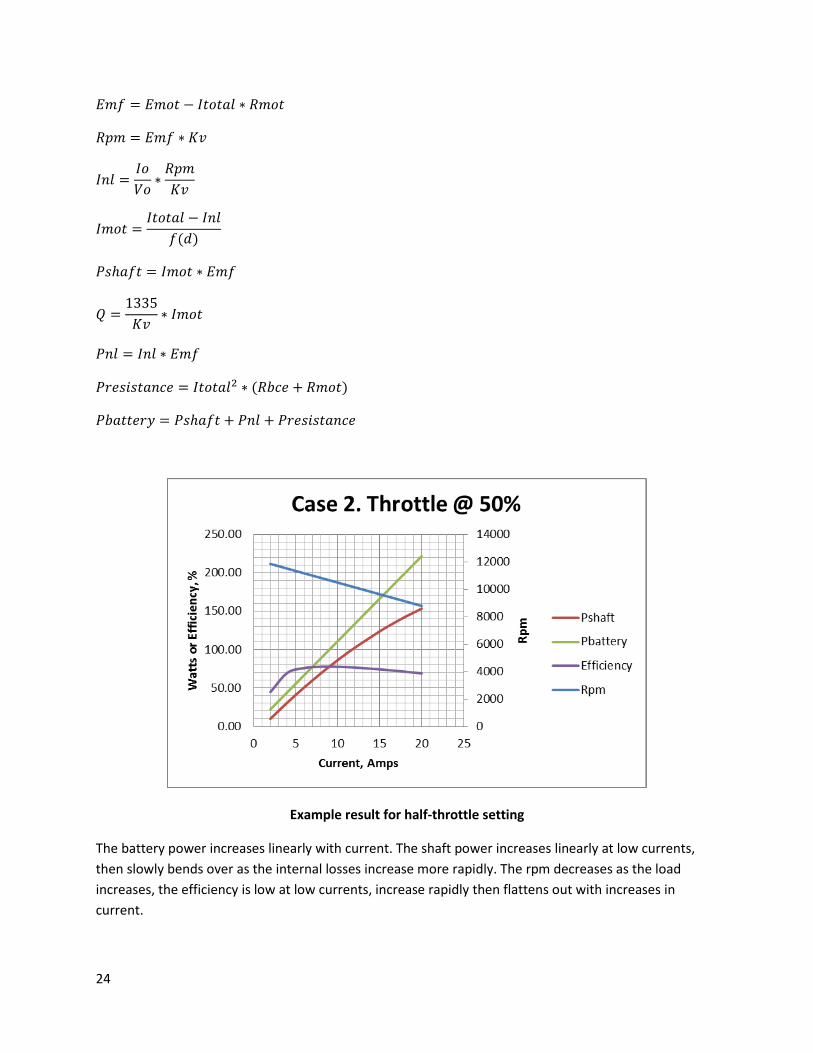
f(d) = 1+d*(1-d) ESC loss factor, multiplied by the motor current. Vesc = Ebat –Itotal*(Rbat + Rcab + Resc) Voltage into ESC Emotor= d*Vesc Voltage out of ESC to motor, viewed as a generator Inl = (Io/Vo)*Emf No load current, Amps Pnl = Inl*Emf No load power, Watts Itotal = Inl + Imot*f(d) Total current, Amps Emf = Kv * Rpm Motor back voltage, Volts Kq = 1353/Kv Torque constant, in-oz. /Amp Q = Kq*Imot Torque, in-oz. Pshaft = Imot* Emf Shaft power, Watts Case1: Assume that the throttle is at its full position and the motor is stalled such that the rpm is zero. Under these conditions the full battery voltage is applied to the motor and only the resistances impede the flow of current. As an example, assume that the battery voltage is 11 Volts and the total resistance is 0.15 ohms in a small motor rated 20 Amps and 1000 Kv. The current is then 11V/.15Ohms = 73 Amps, enough to severely damage the ESC, motor or battery. The torque would be 73*1353/1000 = 98 in- oz. If a finger or piece of clothing were the cause of the stalled condition, the torque would be such that real damage could occur. Case 2: A second case is to estimate the torque, rpm, shaft power and battery power by varying the current. This approach is fairly common in displaying the characteristics of a specific motor.
24
Example result for half-throttle setting
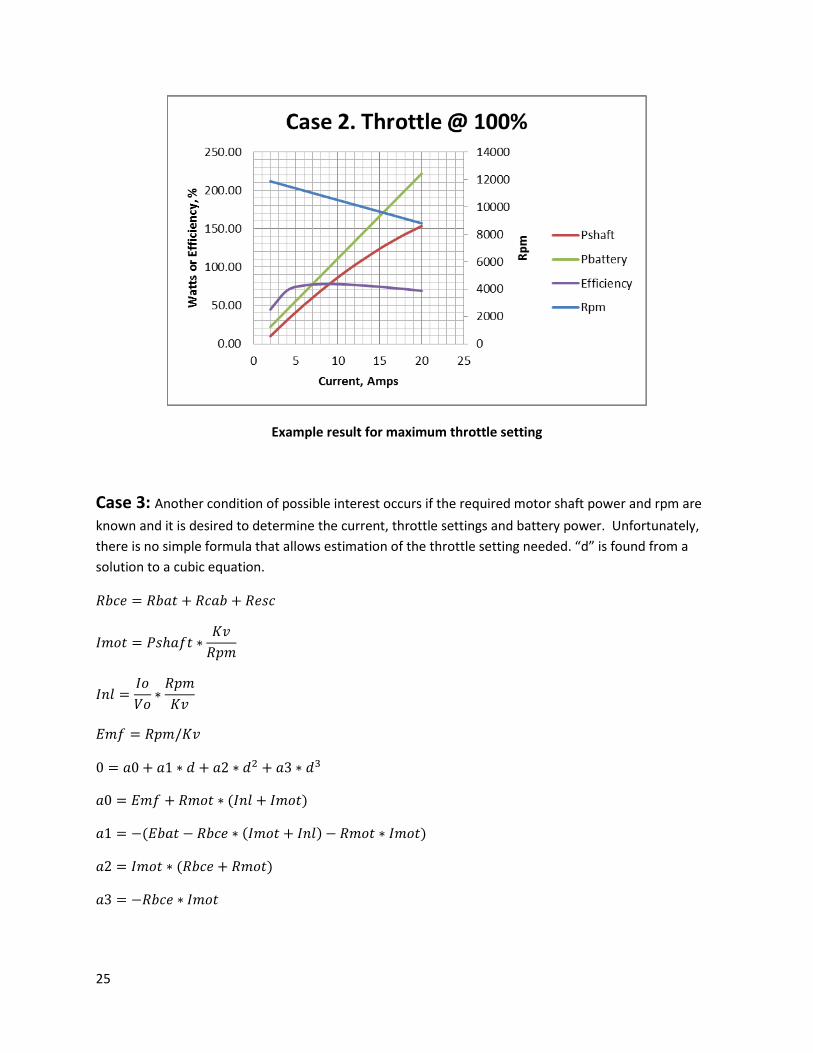
The battery power increases linearly with current. The shaft power increases linearly at low currents,
then slowly bends over as the internal losses increase more rapidly. The rpm decreases as the load
increases, the efficiency is low at low currents, increase rapidly then flattens out with increases in
current.
25
Example result for maximum throttle setting
Case 3: Another condition of possible interest occurs if the required motor shaft power and rpm are
known and it is desired to determine the current, throttle settings and battery power. Unfortunately,
there is no simple formula that allows estimation of the throttle setting needed. “d” is found from a
solution to a cubic equation.
26
It is possible to analyze the cubic equation directly by finding its roots, but it is a messy process. The
solution can also be found by using a convergence algorithm such as that described by Newton.
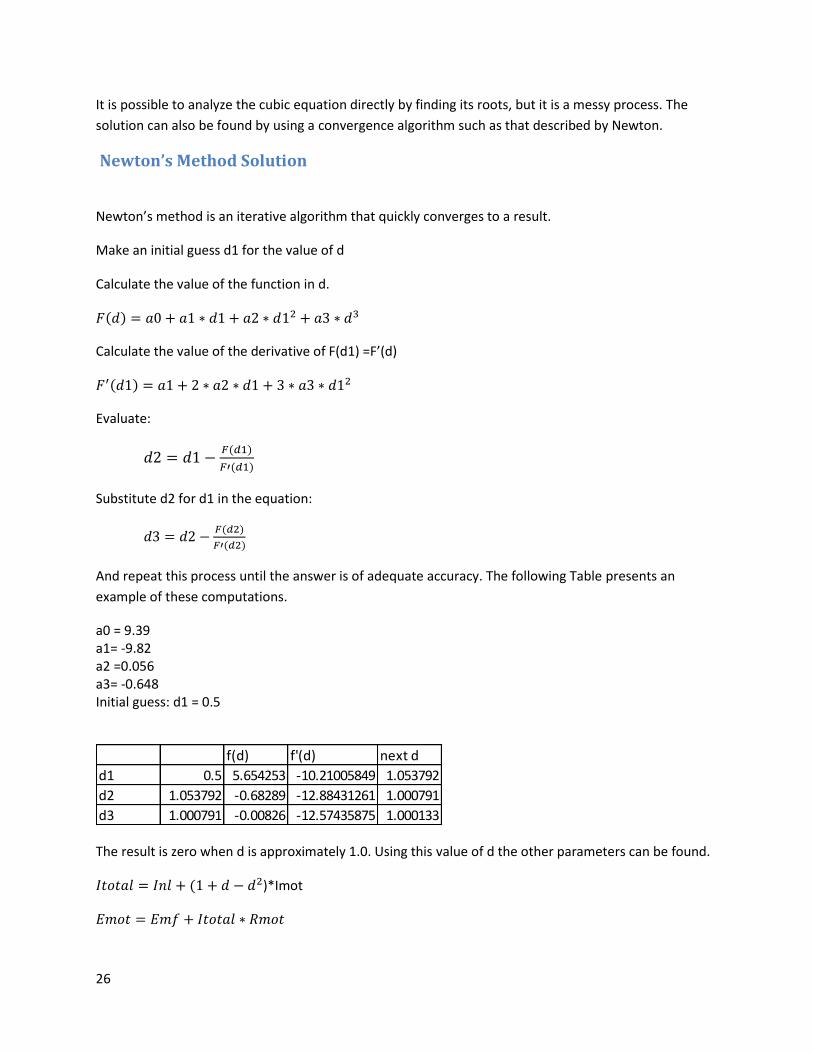
Newton’s Method Solution
Newton’s method is an iterative algorithm that quickly converges to a result.
Make an initial guess d1 for the value of d
Calculate the value of the function in d.
Calculate the value of the derivative of F(d1) =F’(d)
Evaluate:
Substitute d2 for d1 in the equation:
And repeat this process until the answer is of adequate accuracy. The following Table presents an
example of these computations.
a0 = 9.39 a1= -9.82 a2 =0.056 a3= -0.648 Initial guess: d1 = 0.5
The result is zero when d is approximately 1.0. Using this value of d the other parameters can be found.
)*Imot
f(d) f'(d) next d
d1 0.5 5.654253 -10.21005849 1.053792
d2 1.053792 -0.68289 -12.88431261 1.000791
d3 1.000791 -0.00826 -12.57435875 1.000133
27
Case 4: Testing of propellers can be done using electric motors calibrated to the task. It is possible to
test the thrust characteristics of a propeller on a homemade test stand. The measurable quantities are
the thrust, the motor rpm, the total current and the throttle setting. The known parameters are the
resistances of the power system, the source voltage (best if done using a regulated power supply), the
idle current parameters and the motor Kv rating. What is not easy to measure is the actual shaft output
power, or the propeller absorbed power as it is sometimes known. However, it is possible to get a
reasonable estimate of this power using the measured data and the formulas presented before.
Watts
The value of d can be estimated by running the propeller at maximum throttle and recording the
resulting Rpm as d =1. Any other value of d can be estimated by scaling to the measured value of Rpm to
the maximum observed value.
Matching motor to prop & estimating flight performance at max throttle
Assemble input parameters for aircraft, battery, ESC, motor and propeller
Aircraft: Weight, wing span, wing area, fuselage area, tail area, wing Cd as a function of Cl, altitude
Battery: Voltage, AH rating, C rating, Rcables, calculate Rbat
ESC: Maximum continuous current, calculate Resc
Motor: Kv, Rm, Io @ Vo,
Propeller: Diameter, pitch
The following analysis uses Imperial units of measure.
Length in inches, area in square inches, airspeed in mph, weight in ounces unless otherwise noted.
28
Select initial airspeed; stall is suggested √ 5
(ft-lb-sec system)
Compute Cl needed for level flight 5
Compute Wing;
Profile drag using Cl –Cdo graph or formula:
5
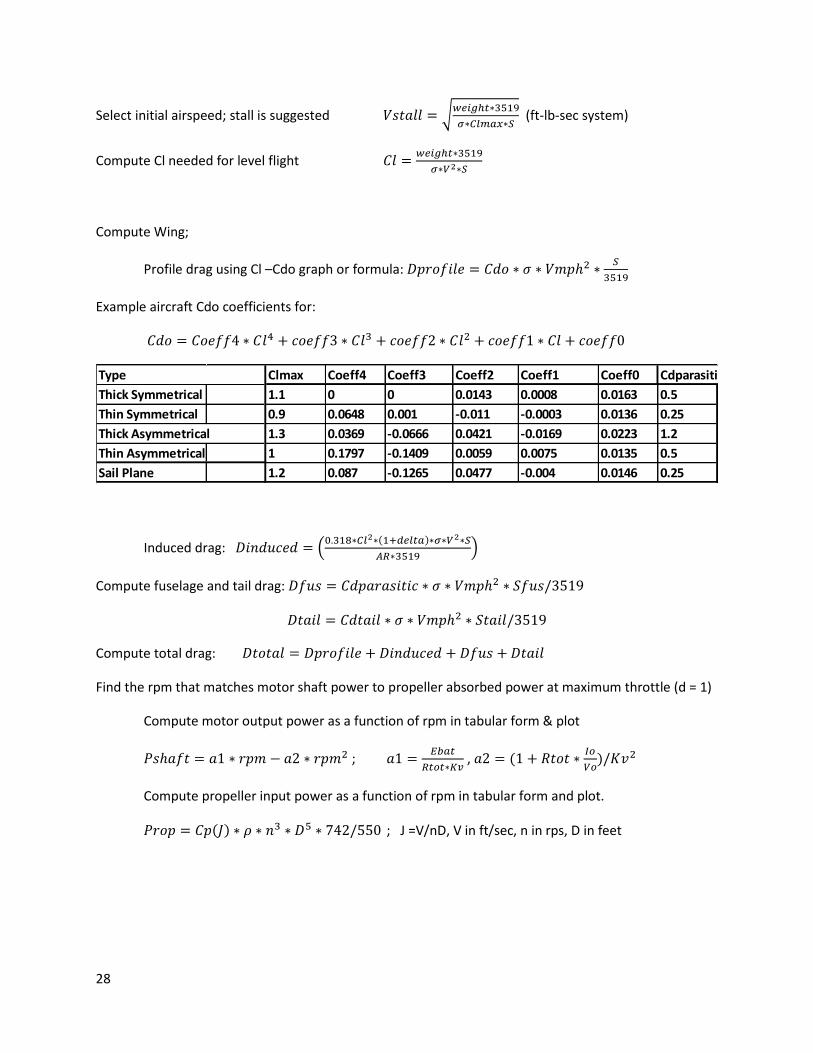
Example aircraft Cdo coefficients for:
Induced drag: (
5 )
Compute fuselage and tail drag:
Compute total drag:
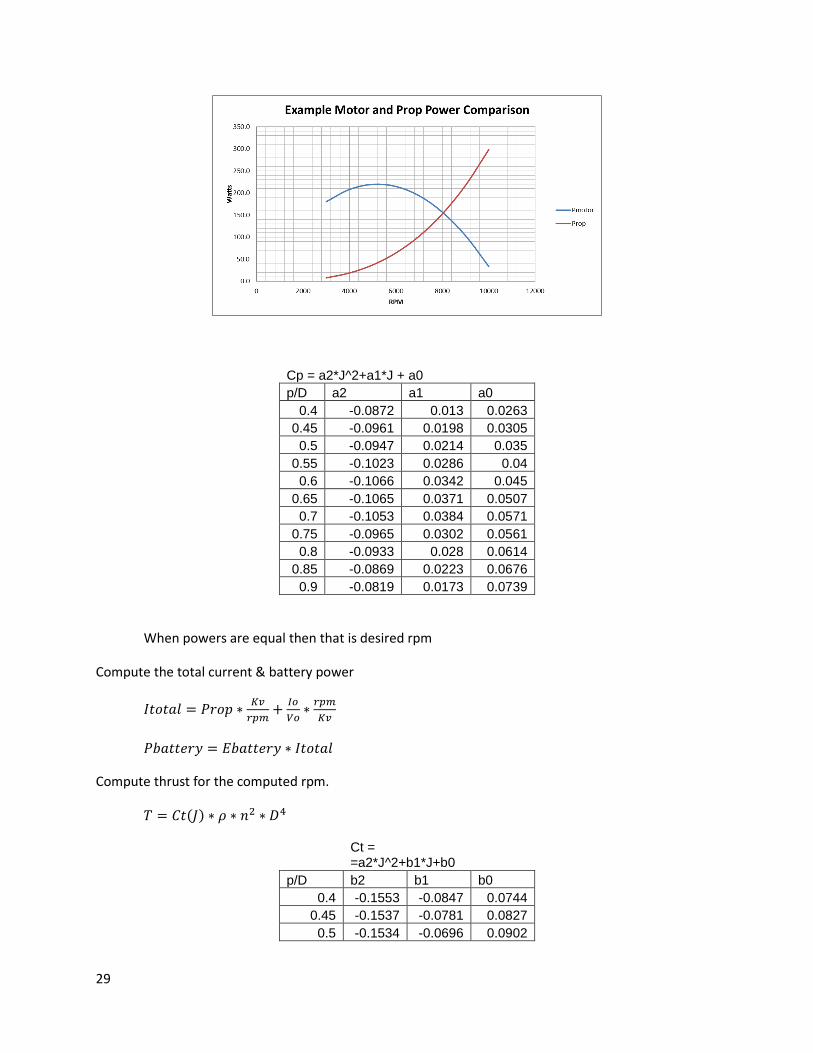
Find the rpm that matches motor shaft power to propeller absorbed power at maximum throttle (d = 1)
Compute motor output power as a function of rpm in tabular form & plot
;
,
Compute propeller input power as a function of rpm in tabular form and plot.
5 ; J =V/nD, V in ft/sec, n in rps, D in feet
Clmax Coeff4 Coeff3 Coeff2 Coeff1 Coeff0 Cdparasitic
Thick Symmetrical 1.1 0 0 0.0143 0.0008 0.0163 0.5
Thin Symmetrical 0.9 0.0648 0.001 -0.011 -0.0003 0.0136 0.25
Thick Asymmetrical 1.3 0.0369 -0.0666 0.0421 -0.0169 0.0223 1.2
Thin Asymmetrical 1 0.1797 -0.1409 0.0059 0.0075 0.0135 0.5
Sail Plane 1.2 0.087 -0.1265 0.0477 -0.004 0.0146 0.25
Type
29
Cp = a2*J^2+a1*J + a0 p/D a2 a1 a0
0.4 -0.0872 0.013 0.0263
0.45 -0.0961 0.0198 0.0305
0.5 -0.0947 0.0214 0.035
0.55 -0.1023 0.0286 0.04
0.6 -0.1066 0.0342 0.045
0.65 -0.1065 0.0371 0.0507
0.7 -0.1053 0.0384 0.0571
0.75 -0.0965 0.0302 0.0561
0.8 -0.0933 0.028 0.0614
0.85 -0.0869 0.0223 0.0676
0.9 -0.0819 0.0173 0.0739
When powers are equal then that is desired rpm
Compute the total current & battery power
Compute thrust for the computed rpm.
Ct = =a2*J^2+b1*J+b0
p/D b2 b1 b0
0.4 -0.1553 -0.0847 0.0744
0.45 -0.1537 -0.0781 0.0827
0.5 -0.1534 -0.0696 0.0902
30
0.55 -0.1534 -0.0599 0.097
0.6 -0.153 -0.0494 0.1029
0.65 -0.1545 -0.0366 0.1077
0.7 -0.1541 -0.0243 0.1116
0.75 -0.1543 -0.03 0.1082
0.8 -0.1541 -0.0243 0.1116
0.85 -0.1551 -0.0122 0.1116
0.9 -0.1562 -0.0027 0.1125
Compute the climb rate and climb angle using the computed thrust and drag difference, Thrust – Drag
Increment the airspeed and repeat until (T – D) =< 0
Bending Moment
Wings are subject to distributed lifting loads along the wing span. They also support the rest of the
aircraft weight at the attachment points.
The loads and stresses reach maximum at the root and decrease toward the tips, becoming zero at the tip. This implies that spars and other components may be made lighter (less strong) the farther they are toward the tip. The load factor, n, takes into account stressful maneuvers where the airplane is at some airspeed and is suddenly pulled up to its maximum lift condition (maximum Cl). It is the ratio of lift to total weight, expressed in Gs. The safety factor 'j' is a multiplier to account for the potential uncertainties in materials, construction and operation. Any taper is assumed to be uniform from root to tip. The computed loads are for the wing only. They do not include the load distribution or stresses associated with the wing to body attachment method. If a single point attachment is used then the loads pass through that point. If there are two attachment points as is common in many designs, the loads are distributed in some fashion between them. Since the highest loads are near the leading edge, attachments here need to be strong.
The lowest stress transfer occurs when the attachment is distributed all the way along the root chord
from one end to the other. Passing the wing through the fuselage with firm support on top and bottom
chords accomplishes this.
Definitions
span Total wing span

31
cr Wing root chord
ct Wing tip chord
Qw Wing weight
Qt Total aircraft weight
Clmax Maximum wing lift coefficient
Vmax Maximum airspeed
J Safety factor
Bending Moment Equations
Wing semi-span
,
Semi-span area
,
Load Factor
Gs
Semi-span load
Tip load intensity
,
Root load intensity
,
Root Moment
,
Root vertical load
,
Stress Analysis
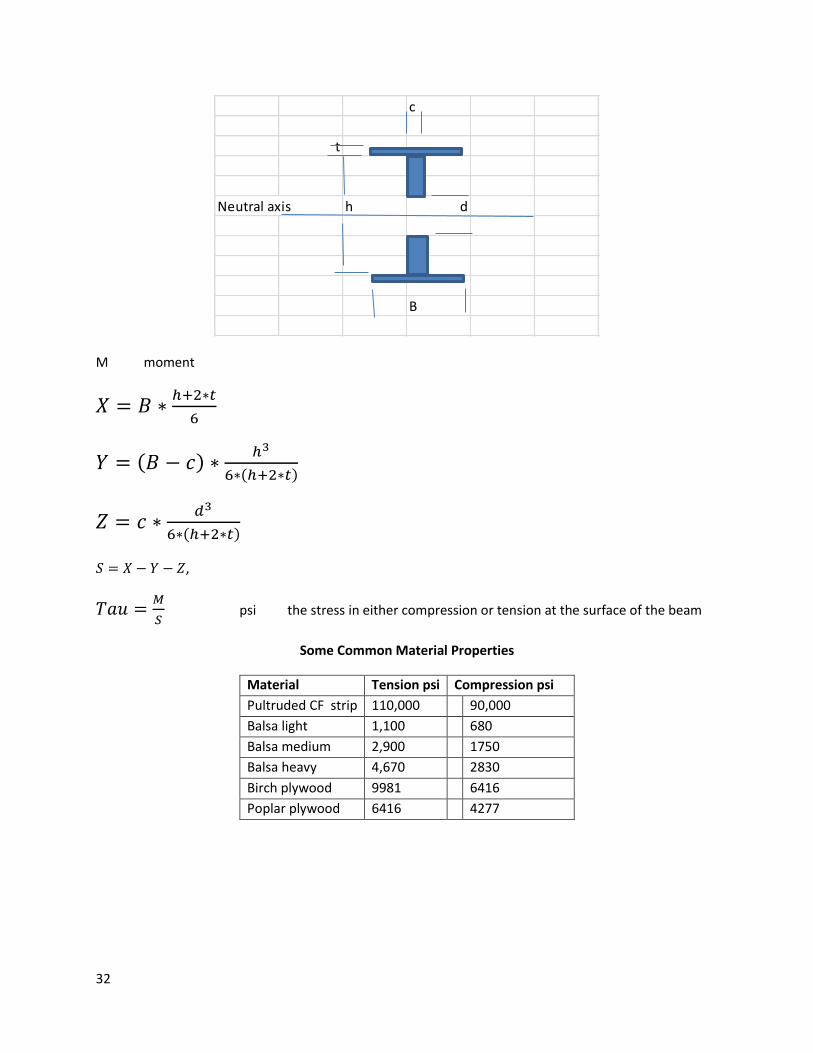
I-Beam Compression and Tension Maxima
32
M moment
,
psi the stress in either compression or tension at the surface of the beam
Some Common Material Properties
Material Tension psi Compression psi
Pultruded CF strip 110,000 90,000
Balsa light 1,100 680
Balsa medium 2,900 1750
Balsa heavy 4,670 2830
Birch plywood 9981 6416
Poplar plywood 6416 4277
c
t
Neutral axis h d
B


















