
RAPPORT DE PROJET -...
32
1 RAPPORT DE PROJET Chargeur de Batterie par Panneaux Solaires Année 2009 - 2010 MARTINETTI Sébastien PELVILLAIN Cyril Licence SDI EEA Ingénierie Electrique
Transcript of RAPPORT DE PROJET -...
1
RAPPORT DE PROJET
Chargeur de Batterie par
Panneaux Solaires
Année 2009 - 2010
MARTINETTI Sébastien PELVILLAIN Cyril Licence SDI EEA Ingénierie Electrique

2
SOMMAIRE
1) INTRODUCTION ............................................................................................................ 3 2) CAHIER DES CHARGES .............................................................................................. 4 3) ETUDE : ............................................................................................................................ 5
3.1) Conversion de l’énergie .................................................................................................. 5 3.1.1) Fonctionnement du panneaux solaire photovoltaïque .............................................. 5 3.1.2) Recherche du point de puissance maximum du panneau ......................................... 6
3.2) Hacheur ........................................................................................................................... 7 3.2.1) Structure du Hacheur : ............................................................................................. 7
3.3) Batterie ............................................................................................................................ 8 3.3.1) Structure de la batterie : ........................................................................................... 8 3.3.2) Fonctionnement de la batterie stationnaire : ............................................................ 8
3.4) Synoptique : .................................................................................................................... 9 4) MISE EN ŒUVRE DU CHARGEUR SOLAIRE ....................................................... 10
4.1) Electronique de puissance et électronique analogique :................................................ 10 4.2) Choix des composants du hacheur série : ..................................................................... 10
4.2.1) Choix du transistor : ............................................................................................... 10 4.2.2) Choix de la diode : ................................................................................................. 11 4.2.3) Choix des radiateurs thermique : ........................................................................... 11 4.2.4) Dimensionnement du condensateur d’entrée : ....................................................... 12 4.2.5) Dimensionnement du condensateur de sortie : ...................................................... 12 4.2.6) Conception de l’inductance de lissage : ................................................................. 13 4.2.7) Choix de la commande du transistor : .................................................................... 15
5) ESSAI DU SYSTEME A L’AIDE D’UN GBF ............................................................ 16 6) CHOIX DES COMPOSANTS PARTIE COMMANDE ............................................ 18
6.1) Amplification par deux du signal de sortie du PIC16F876 :......................................... 18 6.2) Informations arrivant sur le microcontrôleur PIC16F876 : .......................................... 21
7) PROGRAMMATION : .................................................................................................. 24 7.1) Le microcontrôleur PIC16F876 : .................................................................................. 24 7.2) Le PICFLASH : ............................................................................................................ 25 7.3) Le programme : ............................................................................................................. 26
8) TEST FINAL : ................................................................................................................ 27 9) CONCLUSION ............................................................................................................... 30 10) ANNEXES ....................................................................................................................... 31

3
1) INTRODUCTION De nos jours, les énergies renouvelables sont en plein essor malgré une lente
émergence au début. Le soleil, le vent, l’eau et les autres produits végétaux sont des ressources naturelles capables de produire de l’énergie grâce aux technologies développées par les hommes. Les énergies renouvelables sont des sources d’énergie inépuisables, contrairement aux énergies fossiles que nous utilisons et dont leurs quantités diminuent de jour en jour (exemple : Le pétrole, le charbon). De plus, les énergies fossiles émettent des gaz à effets de serre. Dans notre projet, nous avons utilisés des panneaux photovoltaïques. Dans ce cas la nous avons utilisés l’énergie solaire. Le but de ce projet est de concevoir un chargeur de batterie avec un panneau photovoltaïque. Dans ce rapport nous verrons tout d’abord l’étude du passage de l’énergie solaire en une énergie électrique, ainsi que les divers fonctions de notre chargeur de batterie. Enfin, nous discernerons les étapes de la conception de notre projet.

4
2) CAHIER DES CHARGES L’objectif du projet est de construire un chargeur de batterie de puissance 100W alimenté par des panneaux solaire. Nous devons contrôler la charge de la batterie, puis la recherche du point maximal de fonctionnement du panneau solaire et enfin le contrôle du niveau de la charge de la batterie. Dans ce projet, nous mettons en jeu différent domaine scientifique qui sont les suivants : -L’électronique de puissance avec le hacheur -L’électronique analogique avec le comparateur -La programmation avec le microcontrôleur

5
3) ETUDE : 3.1) Conversion de l’énergie Les panneaux solaires photovoltaïques permettent de capter le rayonnement du soleil, qui est alors transformé en électricité. Pour convertir l’énergie solaire en une énergie électrique nous avons utilisé des panneaux solaires photovoltaïques situés sur le toit du bâtiment.
3.1.1) Fonctionnement du panneaux solaire photovoltaïque
Les panneaux solaires photovoltaïques, parfois appelés photoélectrique, transforme la lumière (rayonnement du soleil) en électricité. Les panneaux sont un assemblage de cellules photovoltaïque, chacune d’elles délivrant une tension de0.5V à 0.6V. Elles sont donc assemblées pour créer des modules photovoltaïques de tension normalisée comme par exemple un module de 12V. La cellule photovoltaïque est fabriquée à partir de deux couches de Silicium (matériaux semi-conducteur) : - Une couche dopée avec du bore qui possède moins d’électron que le Silicium, cette zone est donc dopée positivement (Zone P) - Une couche dopée avec du phosphore qui possède plus d’électrons que le Silicium, cette zone est donc dopée négativement (Zone N) Lorsqu’un photon de lumière arrive, son énergie crée une rupture entre un atome de silicium et un électron, modifiant les charges électriques. C’est ce qu’on appelle l’effet photovoltaïque. Les atomes, chargés positivement, vont alors dans la zone P et les électrons, chargés négativement, vont dans la zone N. Une différence de potentiel électrique, c'est-à-dire une tension électrique, est ainsi crée.

6
3.1.2) Recherche du point de puissance maximum du panneau
Un panneau solaire photovoltaïque produit une puissance, celle-ci varie en fonction de l’ensoleillement. Le rayonnement du soleil se mesure en lumen, et le flux lumineux en lux. La relation qu’i y a entre l’éclairement et la puissance et la suivante : 1 lux = 1lm/m² 1lm = 1.6*10-3 W
1 lux = 1.6*10-3 W/m² Pour réaliser les essais nous avons utilisé la méthode voltampèremétrique, comme ça nous pouvions avoir les valeurs des courants et des tensions. De plus, la formule pour la puissance d’un panneaux est la suivante : P = U*I. Le panneau solaire utilisé dans cet essai est de la marque photowatt. Cet essai nous permettra d’avoir la puissance maximal du panneau. Schéma de montage :
Panneau Récepteurs solaire Suite a nos relevés nos avons tracés la caractéristique I = f(U) (voir annexe1). La configuration du panneau est la suivante, l’inclinaison est de 30° et direction sud. La température relevé ce jour là était de 16.3°C. Pour un éclairement de 687500 lux (soit une puissance par m² de 1100), la puissance maximale délivrée par le panneau est de 69.6 W. Si l’éclairement varie de celui du jour ou la mesure a été effectuée lors la puissance maximal va varie aussi.
(+) (-)
A
v

7
Tableau de relevé :
Tension en V Courant en A Puissance en W 20,25 0,15 3,0375 20,154 0,25 5,0385 20,062 0,35 7,0217 19,953 0,45 8,97885 19,814 0,55 10,8977 19,671 0,65 12,78615 19,58 0,75 14,685 19,54 0,85 16,609 19,272 1 19,272 18,935 1,25 23,66875 18,66 1,5 27,99 18,363 1,75 32,13525 18,06 2 36,12 17,796 2,25 40,041 17,502 2,5 43,755 17,222 2,75 47,3605 16,93 3 50,79 16,61 3,25 53,9825 16,3 3,5 57,05 16 3,75 60 15,66 4 62,64 14,99 4,5 67,455 13,92 5 69,6 11 6,2 68,2 10 6,3 63 8 6,4 51,2 6 6,5 39 4 6,5 26 2 6,5 13 0 6,5 0
3.2) Hacheur
3.2.1) Structure du Hacheur : Un hacheur est un convertisseur continu/continu, il permet d'obtenir à partir d'une tension continue fixe, une tension continue réglable. Il existe trois de hacheur , qui sont les suivantes :
- Le hacheur série ou survolteur : - Le hacheur parallèle au dévolteur : - Le hacheur quatre cadrant :
Nous avons choisis un hacheur série car nous n’avons pas besoin de réversibilité en courant ou en tension

8
3.3) Batterie
3.3.1) Structure de la batterie :
Une batterie électrique est un composant électrochimique, elle comporte des électrodes positives et négatives composées d’alliages dissemblables plongées dans un électrolyte (acide). L’ensemble est encapsulé dans un bac scellé ou muni d’un bouchon de remplissage et d’un évent. Les réactions d’oxydoréduction qui gouvernent le fonctionnement d’une batterie sont réversibles, dans la mesure où celle ci n’a pas été longtemps ni complètement déchargée ni trop surchargée. Un fonctionnement prolongé dans l’un ou l’autre de ces états aboutirait à la destruction définitive de la batterie.
3.3.2) Fonctionnement de la batterie stationnaire : La plupart des systèmes photovoltaïques comportent des batteries spéciales (batteries stationnaires à alliages de Plomb) qui emmagasinent l’énergie générée par les panneaux photovoltaïques en prévision des périodes où il n’y a pas de soleil. Ces batteries sont conçues pour restituer un courant stable pendant de longues périodes en conservant leurs aptitudes à la recharge, et ceci à un grand nombre de reprises (cycles). La batterie passe par différente phase qui sont la décharge et la charge de celle-ci.

9
3.4) Synoptique : Voici, le synoptique du montage, cela nous permet devoir le fonctionnement du système. Panneau solaire
Sur ce synoptique, nous pouvons voir que la conversion de tension (continu-continu) est réalisée par le hacheur série. Ensuite le microcontrôleur permet d’effectuer la recherche du point maximum de la puissance de travaille du système (MPPT : Maximum Power Point Tracking), donc il réalise la commande du hacheur. Il relève la tension, le rapport cyclique et transfère les informations sur l’écran LCD. En contrôlant ces paramètres il gère la charge de la batterie.
Hacheur série
Commande du hacheur
Micrcontrôleur
Afficheur LCD
Marche ou arrêt de la charge
Batterie

10
4) MISE EN ŒUVRE DU CHARGEUR SOLAIRE 4.1) Electronique de puissance et électronique analogique : Voici le schéma électrique de la partie puissance du système. Par la suite nous allons déterminer les composants qui le constituent.
4.2) Choix des composants du hacheur série :
4.2.1) Choix du transistor :
Nous avons choisi un transistor de type MOSFET. C’est un transistor utilisé dans le montage de forte puissance crée pour supporter des tensions élevées. Il est employé dans des système comme le notre c'est-à-dire dans de la régulation. Nous avons choisi le transistor suivant IRF530. Caractéristique du transistor :
Tension de sortie : VDS = 100V Courant de sortie : ID = 16A Temps de réponse (TF(on)) : TF(on) = 16 ns
La tension de sortie du panneau est inférieur à celle du transistor, puis le courant du transistor est supérieur a celui de la batterie. Enfin le temps de réponse est suffisant pour notre montage car nous effectuons une mesure toute les 20 ms.

11
4.2.2) Choix de la diode : Nous avons choisi une diode de type shottky pour c’est caractéristique principal comme la rapidité de commutation, tension maximum. Cette diode nous permet d’effectuer la phase de roue libre du hacheur. Cette phase est dû a l’inductance de lissage. La référence de la dioder shottky est BYW81PI-200. Caractéristique de la diode : Tension maximum en inverse : VRRM = 1000V Courant maximum en inverse : IF (RMS) = 25A Nous avons réalisé les mesures sur le panneau (voir le tableau de relevé), on peut constater que les caractéristiques de la diode sont supérieur au valeur mesurer. Lors de nos mesure la tension maximal était de 20V et le courant maximum était 6.5A.
4.2.3) Choix des radiateurs thermique : Pour le transistor :
La méthode utilisée a été tirée d’un ouvrage (le guide de l’électrotechnicien)
Calcul des pertes en commutation : PCOM = (E.I.(TF.TR)/ (2.f) E : Tension en entrée du transistor (au point de puissance maximum Upanneau=13.92V) I : Courant en entrée du transistor (au point de puissance maximum Ipanneau=5A) TF : Temps de réponse TF = 16 ns TR : Temps de réponse (TOFF) TR = 15 ns F : Fréquence de la commande du hacheur f = 50Khz PCOM = 13.92*5*(((15+16).10-9)/2)*50000 PCOM = 0.054 mW Calcul des pertes en conduction : Pcond=ID*V DS
Pour Tc = 175° et ID= Ipanneau = 5A VDS=0.7V Pcond= 4*0.7 Pcond= 2.8W PD = Pcond + PCOM PD = 2.8 + 0.054 PD = 2.854 W

12
Calcul de la résistance thermique : Φa : Résistance thermique Φjc : Résistance thermique entre la jonction et le boitier Φjc : 0.5°C/W Φcs : Résistance thermique entre le boîtier et le dissipateur Φcs : 1°C/W Tj : Température de jonction Tj :175°C Ta : température ambiante Ta : 40°C Φa= (Tj - Ta)/ Pcond - (Φjc + Φcs) Φa=(175-40)/2.854 – (0.5 + 1) Φa= 45.8W Pour la diode : Résistance thermique de la diode : Rth= 4°C/W
4.2.4) Dimensionnement du condensateur d’entrée :
On rajoute un condensateur de découplage entre les panneaux photovoltaïque et le hacheur, car la longueur des câbles amméne de l’inductance. Pour un métre de câble on a un inductance de 1µH. Donc pour définir la valeur exact du condensateur il faut effectuer les tests avec les panneaux solaire. Comme ça on pourra mesurer la valeur de l’inductance, puis définir la longueur des câble. Dans notre cas on a estimer la longueur des câbles entre notre source d’alimentation et le montage a 1 métre, puis on a estimé la valeur de notre condensateur à 100nF. Pour déterminer la valeur du condensateur d’entrée est la même que pour le condensateur de sortie.
4.2.5) Dimensionnement du condensateur de sortie : Pour la fréquence du système, on a choisit une fréquence de 50KHz. On a choisit 50 KHz car plus on monte dans les fréquences plus on diminue la taille des éléments du circuit. En revanche, on évite de travailler dans la plage de fréquence de 10KHz à 20 KHz car cela crée un bruit. La formule pour déterminer la valeur d’un condensateur est la suivante :
ω0=1/ C=1/(l * (ω0)
2) ω0= 2πfo
la pulsation (ω0) est la pulsation de résonnance du système, elle est équivalent a un dixième de la fréquence. Alors dans notre cas la valeur de la fréquence fo est de 5 KHz. C=1/(1.4*10-3*(2π*5000)2) C= 723 nF Pour la valeur du condensateur nous prenons la valeur normalisé la plus proche au dessus de notre dimensionnement, c'est-à-dire que nous prenons un condensateur de 1 µF.

13
4.2.6) Conception de l’inductance de lissage : Pour concevoir cette bobine, nous avons utilisés la documentation du site suivant : www.techniques-ingénieur.fr Nous devons alimenter une batterie (Sonnenschein) 12V, 6.6AH. Pour avoir l’ondulation maximum, il faut que alpha soit égal 0.5 Imax Imin T/2 T La charge d’une batterie s’effectue à 10% de décharge de sa valeur final. Dans notre cas la charge de la batterie sera 5.94AH, soit une décharge de 0.66AH. ∆Imax=(ET)/(4L) E : tension en volt T : période du signal L : Inductance en Henry ∆Imax : Variation maximal du courant La fréquence du hacheur est de 50 KHz. T= 1/f T=1/50000 T=20 µs L= (ET)/(4 ∆Imax ) L=(20*20*10-3) L= 1.4 mH Construction de la bobine : Wmax= 1/2LIbatteriemax
2 Wmax= ½*(1.4*10-3)*0.662 Wmax=0.0003J Φmax=L Imax

14
Φmax=1.4*10-3*0.66 Φmax= 0.92mWb Choix du circuit magnétique : Ae*Sb αL(Ibatteriemax)
2/(J*Bmax) Ae: Section du circuit magnétique Sb: Surface du bobinage ( aire de la fenêtre du circuit magnétique) Le produit Ae*Sb doit être déterminé pour le circuit magnétique choisi Alpha (α) : Coefficient de foisonnement (α : 2.5) J : Densité du conducteur (4A/mm2) Bmax : Induction maximum (Bmax =200mT( B=f(H))) Ae*Sb α*(LI max
2)/(J* Bmax ) Ae*Sb 2.5*(1.4*10-3*0.662)/(0.2*4*10-6) Ae*Sb 0.19*10-8
Section du conducteur : S= Imax/J S=0.66/4 S=0.165mm2 A après avoir calculer le produit (Ae*Sb) et choisi le matériaux, on en déduit à partir de l’inégalité précédente. La valeur du produit pour une structure RM8 : Ae*Sb*=40*10-6*52*10-6 Ae*Sb*=0.2*10-8
La structure convient car le produit est supérieur à celui dont nous avons besoin qui est de Ae*Sb 0.19*10-8
N= (LImax)/( Ae* Bmax ) N=(1.4*10-3*0.66)/( 40*10-6*0.2) N=116 spires Même si cette struture est compatible avec notre système, le nombre de spires que l’on doit effectuer est trop importante par rapport aux dimensions du composant. Alors on n’a prit la structure équivalent mais avec des dimensions plus grandes. C’est la structure RM10. Donc la valeur du produit est la suivante : Ae*Sb*=66*10-6*83*10-6 Ae*Sb*=0.5*10-8
N= (LImax)/( Ae* Bmax ) N=(1.4*10-3*0.66)/( 66*10-6*0.2) N=70 spires Avec la structure RM10 on a un bon compromit entre le matériaux utilisé et la taille du composant Calcul de l’entrefer : µ0 = perméabilité de l’aire (4π*10-7) E=(µ0*N
2 * A e)/L E=(4π*10-7*702*6610-6 )/(1.4*10-3 ) E=0.29mm

15
4.2.7) Choix de la commande du transistor : Pour commander le transistor utilisé (IRF 530), nous utiliserons un driver IR2125. On a mit en place ce driver parce que l’on ne peut pas piloter la gâchette du transistor avec le microcontrôleur, car celui-ci fonctionne entre 0 et 5V. Tandis que la commande de la gâchette fonctionne entre 0 et 10V. Schéma de câblage du driver IR2125
Câblage des entrées/sorties :
N°
de
bro
che
Désignation Fonction
1 VCC tension d'alimentation du circuit logique ( V=15V)
2 IN Signal de commande d'entrée (signal carré PWM) pour le blocage et l'amorçage du transistor
3 ERR NC
4 COM Masse du driver
5 Vs référence des masses
6 CS NC
7 HO Signal de commande de sortie (signal carré PWM) pour le blocage et l'amorçage du transistor
8 Vb Tension de sortie qui alimente le condensateur C

16
Les composants du montage du driver, nous avons dû les dimensionner. Pour le condensateur sur la broche numéro 5, on a utiliser la formule suivant :
Désignation Fonction Valeur
Qg Charge total sur la grille du transistor 32nC
Iqbs=Idss Courant de fuite entre le drain et la source 10μA
Icbs=Igss Courant de fuite entre la grille et la source 100nA
qls Niveau de charge requis par cycle 5nC
f Fréquence des opérations 50KHz
VCC Tension d'alimentation de l'IR2125 15V
Vf Chute de tension dans la diode 0,4V
Vls Chute de tension dans le transistor 0,5V
Vmin=Vgs(th) seuil de tension sur la grille 2V
Le résultat du calcul précédent est de 11.4 nF. Cette valeur n’est pas normalisée, nous avons choisi un condensateur de 33 nF.
5) ESSAI DU SYSTEME A L’AIDE D’UN GBF

17
Schéma du montage : Les alimentations du driver et du hacheur ont été réalisés par des alimantations continues respectivement de valeur 15V et 20V. GBF => signal TTL d’amplitude 10V et de fréquence 50kHz. Relevés effectués : Relevé pour un α de 30%
Relevé pour un α de 70%
GBF
Gachette du
Thyristor

18
Grâce a cet nous avons pu vérifier le bon fonctionnement du système, comme par exemple la variation du alpha.
6) CHOIX DES COMPOSANTS PARTIE COMMANDE 6.1) Amplification par deux du signal de sortie du PIC16F876 : Pour cela nous avons 2 solutions : La première fut d’utiliser un comparateur LM311N car sa technologie à collecteur ouvert permet avec une alimentation 0-10V de transformer le signal de sortie du microcontrôleur. On impose une tension de référence égale à la moitié de l’amplitude du signal de sortie soit: Vref = 5/2 =2.5V Pour obtenir ce résultat nous avons utilisé un pont diviseur de tension :

19
Vµc=5V
Vref
R1
R2
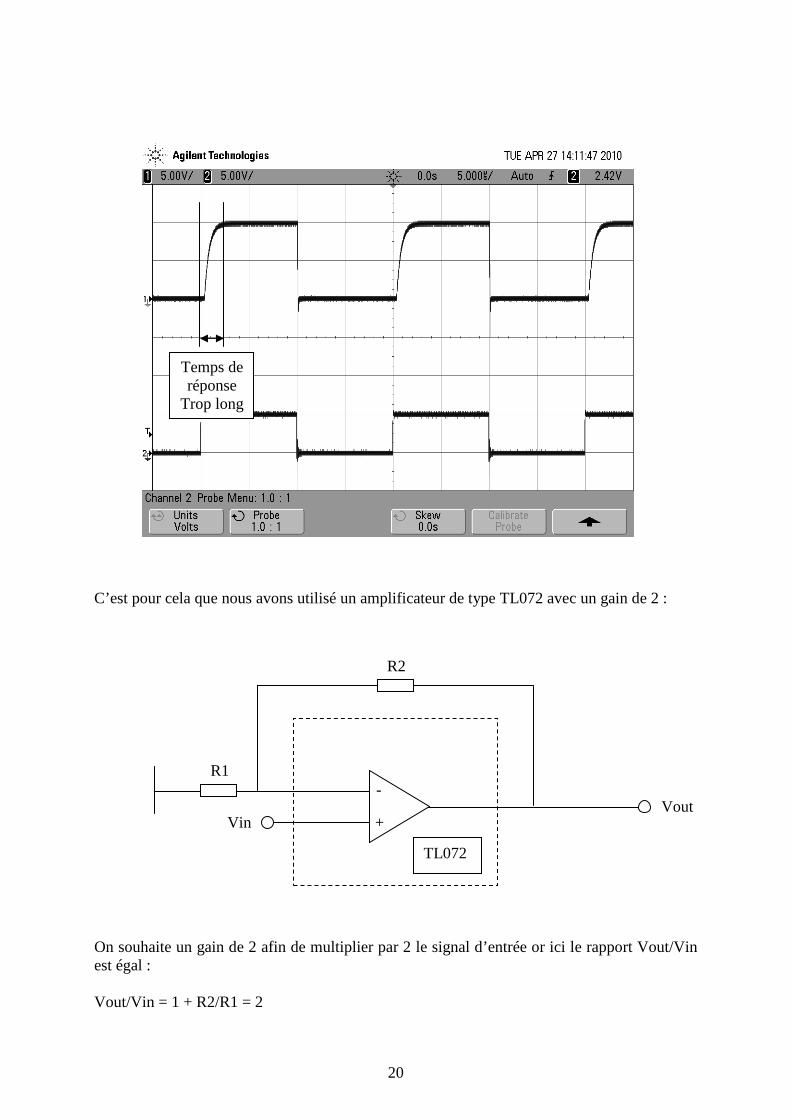
Soit, Vref = (R2/ (R1+R2))* Vµc Ici on a donc, d’où R1=R2. Pour limiter les effets du courant on prendra deux grandes valeurs de résistance soit : R1=R2=3.3kΩ On obtient le schéma suivant : Calcul de R3 : Elle se calcule partir des données constructeur : Le constructeur nous donne l’information suivante Output Leakage Current = 3mA Soit R3=V/I= 10/ (3*10-3) = 3.3 kΩ Malheureusement, cette solution est impossible car le système répond trop lentement au signal 50kHz envoyé par le microcontrôleur comme le prouve le relevé suivant :
R2
R1 + R2 = 1/2
+
-
Vref
Vin Vout
LM311N R3
+10V
20
Temps de réponse
Trop long
C’est pour cela que nous avons utilisé un amplificateur de type TL072 avec un gain de 2 : On souhaite un gain de 2 afin de multiplier par 2 le signal d’entrée or ici le rapport Vout/Vin est égal : Vout/Vin = 1 + R2/R1 = 2
+
-
TL072
Vin
R2
R1
Vout

21
Soit R2/R1 = 1 ce qui implique que R1 est égal à R2. Pour limiter les effets du courant on prendra deux grandes valeurs de résistance soit : R1=R2=3.3kΩ Câblage des entrées/sorties :
N°
de
bro
che
Désignation Fonction
1 Offset null 1 Signal de commande de sortie (signal carré PWM) pour le blocage et l'amorçage du transistor
2 Inverting input 1 Masse avec le gain de deux
3 Non-inverting input 1 Signal de commande d'entrée (signal carré PWM) pour le blocage et l'amorçage du transistor
4 Vcc- tension d'alimentation du circuit logique ( V=-15V)
5 Non-inverting input 2 NC
6 Inverting input 2 NC
7 Output 2 NC
8 Vcc+ tension d'alimentation du circuit logique ( V=+15V)
Nous avons utilisé cette solution car le temps de réponse convient beaucoup mieux au circuit. Traitons maintenant des informations en courant et en tension arrivant sur le PIC16F876.
6.2) Informations arrivant sur le microcontrôleur PIC16F876 :
Temps de réponse plus faible à 50kHz

22
V=20V Tension provenant de la batterie
V0
R3
R4
Information en tension : Pour avoir une information en tension de la part du circuit, nous avons mis en place un pont diviseur de tension afin d’adapter la tension arrivant sur la batterie pour qu’elle soit exploitable par le microcontrôleur. Nous obtenons le schéma suivant : Le microcontrôleur ne supporte que des tensions comprises entre 0 et 5V d’où : V0= (R4 (R3+R4))*V Ici on a donc, d’où R3=330kΩ et R4= 100kΩ. La tension obtenue est ensuite renvoyée sur la borne AN0 (voir schéma) du microcontrôleur. Cette borne correspond à l’entrée du CAN du PIC16F876. Information en courant : En ce qui concerne l’information en courant nous avons utilisé un circuit imprimé nommé MAX 471 pour la mesure du courant. Cette mesure est effectuée par l’intermédiaire d’une résistance interne dans le circuit qui permet de récupérer une tension proportionnelle au courant.
R4
R3 + R4 = 5/20 = 1/4

23
En ce qui concerne la résistance de sortie Rout (voir page précédente), elle est élaborée à l’aide d’un calcul que donne le constructeur : Rout = Vout / (ILoad * 500µA/A) = 400Ω Or d’après le datasheet du MAX 471, le constructeur nous préconise de prendre une résistance Rout de 2kΩ. Cependant dans notre cas le choix de la résistance fut quelque peu différent. En effet sachant que nous utilisons cette information sur le microcontrôleur, nous avons mis en place un autre pont diviseur pour ne pas dépasser les 5V autorisés. De plus, en testant une première fois le circuit nous nous sommes rendus compte que le signal observé n’était pas du tout stable, c’est pour cela, grâce aux informations données par le constructeur, que nous avons mis un condensateur en parallèle dans le circuit du CI (voir schéma) afin de lisser la tension provenant du MAX 471. Cette information est ensuite renvoyée vers la borne AN1 (voir schéma) du microcontrôleur. Cette borne est également une entrée du CAN du PIC16F876. Maintenant nous avons nos deux informations provenant du circuit de puissance nous pouvons à présent passer à la partie programmation du projet.
Résistance de sortie

24
7) PROGRAMMATION : 7.1) Le microcontrôleur PIC16F876 : Un microcontrôleur est une unité de traitement de l'information de type microprocesseur à laquelle on a ajouté des périphériques internes permettant de réaliser des montages sans nécessiter l’ajout de composants annexes. Un microcontrôleur peut donc fonctionner de façon autonome après programmation. Le microcontrôleur que nous avons utilisé fonctionne à l’aide du logiciel MikroC, ce logiciel est gratuit et permet de programmer simplement le PIC16F876.
La société Microship, qui développe le PIC16F876, est un fabricant de semi-conducteurs fondé en 1989, à partir d'une division de General Instruments.
Microchip produit les microcontrôleurs PIC, des composants KEELOQ, des composants radiofréquences, des composants de gestion des batteries, des interfaces, des composants analogiques, etc.
Câblage des différentes entrés/sorties du PIC16F876 :

25
N° d
e br
oche
Désignation Fonction
1 MCLR/VPP Information venant du PICFLASH 2 RA0/AN0 Information en tension 3 RA1/AN1 Information en courant 4 RA2/AN2/VREFRA3/ NC 5 AN3/VREF+ NC 6 RA4/T0CKI NC 7 RA5/AN4/SS NC 8 VSS NC 9 OSC1/CLKIN Entrée du Quartz 4MHz 10 OSC2/CLKOUT Sortie du Quartz 4MHz 11 RC0/T1OSO/T1CKI NC 12 RC1/T1OSI/CCP2 NC 13 RC2/CCP1 Sortie du PIC(programme) signal 50kHz à rapport cyclique variable 14 RC3/SCK/SCL NC 15 RC4/SDI/SDA NC 16 RC5/SDO NC 17 RC6/TX/CK NC 18 RC7/RX/DT NC 19 VSS Relié à la masse 20 VDD +5V 21 RB0/INT Relié à la broche RS du LCD 22 RB1 Relié à la broche E du LCD 23 RB2 Relié à la broche DB4 du LCD 24 RB3/PGM Relié à la broche DB5 du LCD 25 RB4 Relié à la broche DB6 du LCD 26 RB5 Relié à la broche DB7 du LCD 27 RB6/PGC Programme venant du PICFLASH 28 RB7/PGD Programme venant du PICFLASH
7.2) Le PICFLASH :

26
Comme nous l’avons mentionné précédemment le programme fut réalisé à l’aide du logiciel MikroC de MikroElektronika qui développe également le PICFLASH. Ce dernier permet de faire la communication entre l’ordinateur et le microcontrôleur :
7.3) Le programme : Le but du programme était en tout premier lieu de réaliser un asservissement du circuit à puissance maximale. En effet, en récupérant une information en courant et en tension on obtient une puissance. A l’aide du programme on pouvait par la suite diminuer ou augmenter un rapport cyclique afin de conservé la plus grande puissance possible. Cependant, nous avons pris quelques retard avec le projet ce qui nous partiellement bloqué pour la réalisation du programme. Néanmoins, nous avons proposé une solution qui est d’effectuer un asservissement cette fois ci à tension constante. En effet, nous avons fixé dans le programme une valeur de tension et ensuite si la charge vient se modifier, le programme va augmenter ou diminuer le rapport cyclique afin d’augmenter ou de diminuer la tension dans la charge. Le programme suivant comporte tous les commentaires et information nécessaire à la compréhension du programme. Remarque : Le microcontrôleur possède un CAN de 10 bits, le quantum de ce CAN se calcule de la manière suivante. Q = PE/ (2n-1) Q = 5000/1023 Avec PE = pleine échelle = 5V => 5000 Q = quantum 2n-1 = 210-1 = 1023
Asservissement de tension et génération d’un signal 50kHz avec rapport cyclique variable

27
void main () long Umes; // declaration de Umes en long long Imes; // declaration de Imes en long char Usv[16]; // declaration d'un tableau pour stocker la valeur de la tension char Psv[16]; // declaration d'un tableau pour stocker la valeur de la puissance char Isv[16]; // declaration d'un tableau pour stocker la valeur du courant long Ic; long Uc; long Pc; long rap; // declaration du rapport cyclique qui servira ensuite dans l'asservissement Pwm_Init(50000); // Réglage de la fréquence du signal PORTc = 0; //initialisation du port c TRISc = 0; // port c en sortie TRISB = 0; // port b en sortie TRISA = 0xff; //port a en entrée lcd_config(&portb,0,1,wr,5,4,3,2); //confiqure les sorties lcd_cmd(lcd_clear); //initialise l'afficheur lcd lcd_cmd(lcd_cursor_off); //l'afficheur lcd est éteint rap=5; Pwm_Start(); // charge la fonction PWM pour la génération du signal while(1) Umes=adc_read(0); //lie la valeur en tension de l'entrée AN0 Imes=adc_read(1); //lie la valeur en courant de l'entrée AN1 Ic=Imes*10000/6650; // multiplie cette valeur au quantum Uc=Umes*5000/1023; // multiplie cette valeur au quantum Pc=Uc*Ic*43/10000; // on effectue le produit U*I LongToStr(Uc*43/10,Usv); //passage de la valeur de long dans le tableau LongToStr(Pc,Psv); //passage de la valeur de long dans le tableau lcd_out(1, 1, Usv); // charge le texte dans l'afficheur et affiche la tension lcd_out(1, 13, "mV"); // affiche l'unité lcd_out(2, 1, Psv); // affiche la puissance lcd_out(2, 13, "mW"); // affiche l'unité if(Uc<1395) // 1395 valeur de la tension que l'on fixe soit 6V => 6/4.3=1.395 rap=rap+2; // on incrémente le rapport cyclique de 2 si Uc<6V else if(Uc>1395) rap=rap-2; // on décrémente le rapport cyclique de 2 si Uc>6V else rap=rap; Pwm_Change_Duty(rap); // on intègre le nouveau rapport cyclique dans la fonction PWM PORTc= ~PORTc; // Programme de la LED DELAY_ms(1000); // effectue le programme toutes les secondes
8) TEST FINAL :

28
Pour ce test final, nous vous proposons une photo de système complet avec partie puissance et partie commande ainsi que des relevés du signal en sortie de l’IR2125 (tension sur la gâchette) et de la tension aux bornes de la charge avec des indications sur le courant. Relevé pour une tension de 6.3V et un courant de 0.216A :

29
Relevé pour une tension de 6.3V et un courant de 0.4A : Relevé pour une tension de 6.3V et un courant de 0.8A :

30
Avec ces différents relevés effectués nous pouvons constater qu’avec une augmentation de la charge (soit une augmentation du courant) le programme fait varier le rapport cyclique pour que la tension aux bornes de la charge reste à 6.3V.
9) CONCLUSION

31
Ce projet fût très instructif, car il nous a permis de nous familliariser avec les énergies renouvelable. En effet, malgré que nous n’ayons pas pu le tester sur les panneaux solaires dans des conditions réelles, notre système est adapté aux energies renouvenables.
Cependant, nous avons apporté quelques modifications au cahier des charges en ce qui concerne la programmation. En effet, au départ on souhaitait faire l’asservissement du sytème à puissance maximale et finalement on a trouvé un compromis en réalisant l’asservissement à tension const ante.
A travers ce projet, nous avons pu mettre en pratique toutes les connaissances en electronique, en electrotechnique et en automatique aquises au cours de l’année. De plus ce projet nous a permis d’aquerir de plus amples connaissances qu’il s’agit de la programmation ou du dimmensionnement des différents composants.
Nous regrettons cependant de ne pas avoir mis en place ce projet sur les panneaux
solaires car cela nous aurais permis d’apporter quelques modification afin d’optimiser le système comme par exemple un affichage des différentes valeurs disponible comme le courant, le rapport cyclique en %, et peut-être mçme insérer une barre de chargement de la batterie mais nous pensons que tout système a ses limites. Ainsi, l’énergie solaire offre des possibilités infinies qu’on commence à retrouver seulement dans certains portables et autres systèmes.
10) ANNEXES

32
Caractéristiques Courant/Tension et Puissance/Tension
Diode BYT 12PI-1000
Thyristor IRF530
AOP TL072
Driver IR2125
Capteur de courant MAX471


















