Range Compression and Waveform Optimization for MIMO Radar … · 2007. 5. 22. · Range...
30
Range Compression and Waveform Optimization for MIMO Radar: A Cram´ er-Rao Bound Based Study 1 Jian Li 2 Luzhou Xu 2 Petre Stoica 3 Keith W. Forsythe 4 and Daniel W. Bliss 4 Abstract A MIMO (multi-input multi-output) radar system, unlike standard phased-array radar, can transmit via its antennas multiple probing signals that may be correlated or uncorrelated with each other. This waveform diversity offered by MIMO radar enables superior capabilities com- pared with a standard phased-array radar. One of the common practices in radar has been range compression. We first address the question of “to compress or not to compress” by considering both the Cram´ er-Rao bound (CRB) and the sufficient statistic for parameter estimation. Next, we consider MIMO radar waveform optimization for parameter estimation for the general case of multiple targets in the presence of spatially colored interference and noise. We optimize the probing signal vector of a MIMO radar system by considering several design criteria, including minimizing the trace, determinant, and the largest eigenvalue of the CRB matrix. We also con- sider waveform optimization by minimizing the CRB of one of the target angles only or one of the target amplitudes only. Numerical examples are provided to demonstrate the effectiveness of the approaches we consider herein. IEEE Transactions on Signal Processing Revised in January 2007 1 This work was supported in part by the Defense Advanced Research Projects Agency under Air Force contract FA8721-05-C-0002 and under Grant No. HR0011-06-1-0031 and by the Office of Naval Research under Grant No. N000140710293. Opinions, interpretations, conclusions, and recommendations are those of the authors and are not necessarily endorsed by the United States Government. The first author performed part of this work while a Visiting Scientist at the MIT Lincoln Laboratory. 2 Jian Li and Luzhou Xu are with the Department of Electrical and Computer Engineering, P.O. Box 116130, University of Florida, Gainesville, FL 32611-6130, USA. Email: {li, xuluzhou}@dsp.ufl.edu. Please address all correspondence to Jian Li; Phone: (352) 392-2642; Fax: (352) 392-0044. 3 Petre Stoica is with the Department of Information Technology, Uppsala University, Uppsala, Sweden. Email: [email protected]. 4 Keith W. Forsythe and Daniel W. Bliss are with the MIT Lincoln Laboratory, Lexington, MA 02420, USA. Email: {forsythe, bliss}@ll.mit.edu.
Transcript of Range Compression and Waveform Optimization for MIMO Radar … · 2007. 5. 22. · Range...

Range Compression and Waveform Optimization for MIMO Radar:A Cramer-Rao Bound Based Study1
Jian Li2 Luzhou Xu2 Petre Stoica3 Keith W. Forsythe4 and Daniel W. Bliss4
AbstractA MIMO (multi-input multi-output) radar system, unlike standard phased-array radar, can
transmit via its antennas multiple probing signals that may be correlated or uncorrelated witheach other. This waveform diversity offered by MIMO radar enables superior capabilities com-pared with a standard phased-array radar. One of the common practices in radar has been rangecompression. We first address the question of “to compress or not to compress” by consideringboth the Cramer-Rao bound (CRB) and the sufficient statistic for parameter estimation. Next,we consider MIMO radar waveform optimization for parameter estimation for the general caseof multiple targets in the presence of spatially colored interference and noise. We optimize theprobing signal vector of a MIMO radar system by considering several design criteria, includingminimizing the trace, determinant, and the largest eigenvalue of the CRB matrix. We also con-sider waveform optimization by minimizing the CRB of one of the target angles only or one ofthe target amplitudes only. Numerical examples are provided to demonstrate the effectivenessof the approaches we consider herein.
IEEE Transactions on Signal ProcessingRevised in January 2007
1This work was supported in part by the Defense Advanced Research Projects Agency under Air Force contractFA8721-05-C-0002 and under Grant No. HR0011-06-1-0031 and by the Office of Naval Research under Grant No.N000140710293. Opinions, interpretations, conclusions, and recommendations are those of the authors and arenot necessarily endorsed by the United States Government. The first author performed part of this work while aVisiting Scientist at the MIT Lincoln Laboratory.
2Jian Li and Luzhou Xu are with the Department of Electrical and Computer Engineering, P.O. Box 116130,University of Florida, Gainesville, FL 32611-6130, USA. Email: {li, xuluzhou}@dsp.ufl.edu. Please address allcorrespondence to Jian Li; Phone: (352) 392-2642; Fax: (352) 392-0044.
3Petre Stoica is with the Department of Information Technology, Uppsala University, Uppsala, Sweden. Email:[email protected].
4Keith W. Forsythe and Daniel W. Bliss are with the MIT Lincoln Laboratory, Lexington, MA 02420, USA.Email: {forsythe, bliss}@ll.mit.edu.

MIMO Transmit Array
MIMO Receive Array
Targets
Transmit Phased-Array
Receive Phased-Array
Targets
(a) (b)
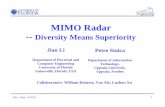
Fig. 1. (a) MIMO radar vs. (b) phased-array radar.
I. Introduction
MIMO (multi-input multi-output) radar is an emerging technology that is attracting the atten-
tion of researchers and practitioners alike. Unlike a standard phased-array radar, which transmits
scaled versions of a single waveform, a MIMO radar system can transmit via its antennas mul-
tiple probing signals that may be quite different from each other (see Figure 1). This waveform
diversity offered by MIMO radar enables superior capabilities compared with a standard phased-
array radar; see, e.g., [1] - [19]. For co-located transmit and receive antennas, for example, MIMO
radar has been shown to offer higher resolution (see, e.g., [1], [3]) and sensitivity (to detecting
slowly moving targets) [6], better parameter identifiability [12], [19], and direct applicability of
adaptive array techniques [12], [14].
One of the most interesting research topics on MIMO radar is the optimization of its multiple
transmitted waveforms or, more precisely, the optimization of the covariance matrix of these
waveforms. Waveform optimization has been used to achieve flexible transmit beampattern
designs for MIMO radar (see, e.g., [7], [17]). Waveform optimization has also been used for
MIMO radar imaging and parameter estimation [10].
In this paper, we consider MIMO radar waveform optimization for parameter estimation for
the general case of multiple targets in the presence of spatially colored interference and noise.
Some of our results can be seen as significant extensions of those presented in [10], where the
parameter estimation of a single target in the presence of spatially and temporally white noise
is considered. One of the common practices in radar has been range compression. We first
1

address the question of “to compress or not to compress” by considering both the Cramer-
Rao bound (CRB) and the sufficient statistic for parameter estimation. We then optimize the
probing signal vector of a MIMO radar system by considering several design criteria, namely
minimizing the trace, determinant, and the largest eigenvalue of the CRB matrix. We also
consider waveform optimization by minimizing the CRB of one of the target angles only or one
of the target amplitudes only since, for example, only the angle of the target of interest may
be of importance in some applications. Numerical examples are provided to demonstrate the
effectiveness of the approaches we propose herein.
II. Problem Formulation
Consider a MIMO radar equipped with co-located antennas (e.g., half-wavelength inter-element
spacing). Let N and M , respectively, denote the numbers of transmit and receive antennas. The
data matrix received by such a MIMO radar can be written as (see, for example, [12], [14], [19]):
X =K∑
k=1
a(θk)bkvT (θk)Φ + Z, (1)
where the columns of X ∈ CM×L are the received data vectors, with L being the snapshot
number; {θk}Kk=1 are the locations of the targets with K being the number of targets at a
particular range bin of interest; a(θ) ∈ CM×1 and v(θ) ∈ CN×1 are the steering vectors for
the receiving and transmitting arrays, respectively; {bk}Kk=1 are the target complex amplitudes,
which are proportional to the radar-cross-sections (RCS) of the targets; the rows of Φ ∈ CN×L
are the transmitted waveforms, which are known and deterministic; Z is the interference and
noise term, which includes the responses due to targets at other range bins, i.e., target echoes
arriving earlier or later than the echoes due to the aforementioned K targets in the range bin of
interest; and (·)T denotes the transpose. We make the simplifying assumption that the columns
of Z are independent and identically distributed circularly symmetric complex Gaussian random
vectors with mean zero and an unknown covariance matrix Q. In practice, this assumption may
be quite accurate for properly designed transmit waveforms.
For notational simplicity, (1) can be rewritten as:
X = A(θ)BVT (θ)Φ + Z, (2)
2

where
A = [a(θ1) · · · a(θK)], V = [v(θ1) · · · v(θK)], (3)
θ = [θ1 · · · θK ]T , b = [b1 · · · bK ]T , B = diag(b), (4)
with diag(b) denoting a diagonal matrix with b being its diagonal.
The problem of main interest herein is to optimize the (sample) covariance matrix of the
transmitted waveforms in Φ by considering several optimization criteria based on the CRB
matrix of the target parameters {θk}Kk=1 and {bk}K
k=1. However, before addressing this problem,
we will discuss first the question of “to compress or not to compress” from both a CRB and a
sufficient statistic perspective. While this question is somewhat separate from that of optimizing
the transmitted waveforms, both of them can be addressed using the same tool, viz. the CRB of
the target parameters, and this is the reason why we consider both questions in the same paper.
III. To Compress Or Not To Compress
One of the common practices in radar has been range compression first. Is this really nec-
essary? In this section, we address this question of “to compress or not to compress.” We use
ΦH(ΦΦH)−12 , instead of ΦH , for range compression, to keep the interference and noise term
temporally white after range compression; hereafter, (·)−1/2 denotes the inverse of the Hermitian
square root of a matrix and (·)H indicates the Hermitian transpose. The range-compressed signal
can be written as
Y , XΦH(ΦΦH)−12 = A(θ)BVT (θ)(ΦΦH)
12 + Z, (5)
where
Z = ZΦH(ΦΦH)−12 . (6)
The covariance matrix of vec(Z) has the form:
E[vec(Z)vecH(Z)] = E{
[(ΦH(ΦΦH)−12 )T ⊗ I]vec(Z)vecH(Z)[(ΦH(ΦΦH)−
12 )T ⊗ I]H
}(7)
= [(ΦH(ΦΦH)−12 )T ⊗ I] [I⊗Q] [(ΦH(ΦΦH)−
12 )∗ ⊗ I] (8)
= I⊗Q, (9)
where (·)∗, ⊗ and vec(·) denote the complex conjugate, Kronecker matrix product and the
vectorization operator (stacking the columns of a matrix on top of each other), respectively.
3

Hence, Z has the same statistical properties as Z, i.e., the columns of Z are also independent
and identically distributed circularly symmetric complex Gaussian random vectors with mean
zero and unknown covariance Q.
Therefore, (5) has the same form and properties as (2) with the only difference being that the
waveform matrix is now (ΦΦH)12 instead of Φ. Note that Φ and (ΦΦH)
12 have the same energy
(as opposed to power), but that in general the latter contains a smaller number of columns or
“snapshots” than the former. Hence, range compression is in essence a “waveform compression”
operation, i.e., Φ is compressed to (ΦΦH)12 .
We now consider the Cramer-Rao bound (CRB) of the unknown target parameters θ and b,
which represents the best performance of any unbiased estimators. The CRB matrix is derived in
Appendix A. The Fisher information matrix (FIM) with respect to θ, and the real and imaginary
parts of b in (1) can be written as:
F = 2
Re(F11) Re(F12) − Im(F12)
ReT (F12) Re(F22) − Im(F22)
− ImT (F12) − ImT (F22) Re(F22)
, (10)
where
F11 = L(AHQ−1A)¯ (B∗VHR∗ΦVB) + L(AHQ−1A)¯ (B∗VHR∗
ΦVB)
+ L(AHQ−1A)¯ (B∗VHR∗ΦVB) + L(AHQ−1A)¯ (B∗VHR∗
ΦVB),, (11)
F12 =L(AHQ−1A)¯ (B∗VHR∗ΦV) + L(AHQ−1A)¯ (B∗VHR∗
ΦV)., (12)
F22 = L(AHQ−1A)¯ (VHR∗ΦV), (13)
A =[∂a(θ1)
∂θ1· · · ∂a(θK)
∂θK
], (14)
V =[∂v(θ1)
∂θ1· · · ∂v(θK)
∂θK
], (15)
and
RΦ , 1L
ΦΦH , (16)
with ¯ and Re(·) (Im(·)), respectively, denoting the Hadamard (element-wise) matrix product
and the real (imaginary) part of a complex-valued matrix. Then, the corresponding CRB matrix
is:
C = F−1. (17)
4

Note that the CRB matrix of b and θ depends only on LRΦ, which contains the total transmit
energies via each antenna and the correlations between transmit waveforms. Therefore, once
LRΦ is given, the CRB matrix is fixed no matter what the snapshot number is. This means
that the CRB matrices associated with the data models in (1) and (5) are the same, i.e., range
compression does not change the CRB matrix of the target parameters. This is a somewhat
remarkable fact, as range compression is not a one-to-one operation: we can get (5) from (1),
but not vice versa.
Now, the CRB is achievable only asymptotically and hence it does not predict the accuracy
of the target parameter estimates when the snapshot number is finite. To theoretically address
the question of “to compress or not to compress” when the number of snapshots is finite, a
“sufficient statistic” analysis of the received data under various conditions is given in Appendix
B. It is shown that in the case of an unknown interference and noise covariance matrix Q, the
range-compressed data Y is not a sufficient statistic for b and θ, but it, along with the sample
covariance matrix RX = 1LXXH , forms a sufficient statistic for all unknowns. This conclusion is
based on the assumption that the columns of Z are i.i.d. circularly symmetric complex Gaussian
random vectors. When, for example, Z is temporally correlated, Y and RX will no longer form
a sufficient statistic for b and θ, because, intuitively, they do not contain the temporal statistical
information of Z.
IV. Waveform Optimization
The MIMO radar waveforms, or more precisely, the (sample) covariance matrix RΦ of the
waveforms, can be optimized, based on the CRB matrix, under either a total power constraint,
i.e.,
tr (RΦ) = P, (18)
or an elemental power constraint, i.e., each diagonal element of RΦ is P/N , where P denotes the
total transmitted power. Like in [10], we focus below on the total power constraint. Next, we first
present several waveform optimization criteria and their numerical solutions, and then derive a
structure of the optimal waveform covariance matrix and two closed-form optimal solutions for
the single-target case.
5

A. Waveform Optimization Criteria and Numerical Solutions
The CRB matrix can be calculated approximately, as a function of the waveform covariance
matrix RΦ, using estimated target parameters as well as an estimated covariance matrix of
the interference and noise obtained during an initial probing with uncorrelated waveforms. We
consider below the waveform optimization for the targets in a particular range bin of interest.
Note from (10) that the FIM of the target parameters is a linear function of the covariance matrix
RΦ of the MIMO radar waveforms. Hence minimizing the trace, the determinant, or the largest
eigenvalue of the CRB matrix in (17) with respect to RΦ, subject to the constraints that RΦ ≥ 0
and either tr (RΦ) = P or (RΦ)nn = P/N , n = 1, · · · , N , is a convex optimization problem that
can be solved efficiently (in polynomial time) using interior point methods [20]. In the following,
we will consider all said optimization criteria since it is not a priori obvious which criterion gives
the “best performance” and is also robust to initial parameter estimation errors.
First, consider minimizing the trace of the CRB matrix, which is referred to as the Trace-Opt
criterion:
minRΦ
tr (C)
s.t. RΦ ≥ 0,
tr (RΦ) = P. (19)
The waveform optimization based on the Trace-Opt criterion can be readily cast as a semidefinite
program (SDP) [20]. Note that in certain practical applications, we may wish to place more
emphasis on some target parameters, or perhaps to compensate for the unit selection (such as
degrees versus radians for the target angles), or to balance the units used for different target
parameters (such as angles versus complex amplitudes). With this in mind, we generalize the
Trace-Opt criterion to the following SDP:
min{tk}3K
k=1,RΦ
3K∑
k=1
µktk
s.t.
F ek
eTk tk
≥ 0, k = 1, · · · , 3K,
RΦ ≥ 0,
tr (RΦ) = P, (20)
6

where {tk} are auxiliary variables, ek denotes the kth column of the identity matrix (of dimension
3K above), F is the FIM given in (10), which is a linear function of RΦ, and µk, k = 1, · · · , 3K,
is the kth weighting factor. The original Trace-Opt criterion in (19) corresponds to µk = 1,
k = 1, · · · , 3K. Note that the constraints in the above SDP are either linear matrix inequalities
(LMIs) or linear equalities in the elements of the waveform covariance matrix RΦ.
The above generalized Trace-Opt criterion can be further extended. Let J denote a possibly
rectangular (tall) matrix. Consider now minimizing the trace of JHCJ = JHF−1J. Note that
the formulation in (20) becomes a special case corresponding to a diagonal matrix J with {µ1/2k }
on its diagonal. The minimization of tr(JHF−1J) can also be cast as a SDP as follows:
minC,RΦ
tr(C)
s.t.
C JH
J F
≥ 0,
RΦ ≥ 0,
tr (RΦ) = P. (21)
Note that, for fixed RΦ, the minimization of tr(C) with respect to C under the first LMI
constraint above yields C = JHF−1J as described.
Second, we consider minimizing the determinant of the CRB matrix, which is referred to as the
Det-Opt criterion. Since the CRB matrix is the inverse of the FIM, minimizing |C| is equivalent
to maximizing |F|:
maxRΦ
|F|
s.t. RΦ ≥ 0,
tr (RΦ) = P. (22)
The above max-det problem is a convex optimization problem that can be solved efficiently using
public-domain software packages, see [21] [22] [23].
The Det-Opt criterion can also be generalized. Specifically, consider the problem of minimizing
the determinant of JHCJ = JHF−1J. Note that, for some matrices of appropriate dimensions,
the inequality Γ−1 ≥ JHF−1J is equivalent to Γ ≥ ΓJHF−1JΓ. Then the generalized Det-Opt
7

criterion can be cast as the following max-det problem:
maxΓ,RΦ
|Γ|
s.t.
Γ ΓJH
JΓ F
≥ 0,
RΦ ≥ 0,
tr (RΦ) = P, (23)
which, similarly to (22), can be solved efficiently. In particular, to minimize the determinant of
the CRB block associated with the first target only, for example, J can be chosen as a 3K × 3
matrix, with its 1st, (K + 1)st, and (2K + 1)st rows, respectively, being the 1st, 2nd, and 3rd
rows of the identity matrix of dimension 3, and all the other rows are set to zero.
Third, consider minimizing the largest eigenvalue of the CRB matrix, which is referred to as the
Eigen-Opt criterion. Since minimizing the largest eigenvalue of the CRB matrix C is equivalent
to maximizing the smallest eigenvalue of the FIM F, the waveform optimization under the Eigen-
Opt criterion can be readily cast as a SDP [20]:
mint,RΦ
−t
s.t. F ≥ tI,
RΦ ≥ 0,
tr (RΦ) = P, (24)
where t is an auxiliary variable and I denotes the identity matrix (here of dimension 3K).
Likewise, the Eigen-Opt criterion can also be generalized. Similarly to what we have done
above for the other criteria, consider minimizing the maximum eigenvalue of JHCJ = JHF−1J.
This generalized Eigen-Opt problem can be readily cast as a SDP as follows:
mint,RΦ
t
s.t.
tI JH
J F
≥ 0,
RΦ ≥ 0,
tr (RΦ) = P. (25)
8

Using this generalization, we can for example minimize the maximum eigenvalue of the CRB
block corresponding to the target of interest only.
In addition to the above design problem, we also consider specifically the problem of minimizing
the CRB of one of the target angles only, which we refer to as the Angle-only criterion. Note that
this criterion was considered in [10] under the spatially and temporally white noise assumption on
Z in (1) and in the single-target case. Without loss of generality, assume that we are interested
in the angle of the first target. Then the Angle-only criterion is simply a special case of the
generalized Trace-Opt criterion in (20) with µ1 = 1 and µk = 0, k = 2, · · · , 3K.
Finally, note as a counterpart to the angle-only criterion, the Amplitude-only criterion, which
consists of minimizing the CRB of one of the target amplitudes only. Without loss of generality,
assume that we are interested in the complex amplitude of the first target. Then the Amplitude-
only criterion is again a special case of the generalized Trace-Opt criterion in (20) with µK+1 =
µ2K+1 = 1 and µk = 0 for all other k. Since angle is of more importance in many practical
applications, the Amplitude-only criterion will not be considered any further.
B. Structure of the Optimal Waveform Covariance Matrix
We show in Appendix C that for all of the aforementioned optimization criteria and for the total
power constraint, the optimized transmitted covariance matrix R∗Φ has a maximum rank of 2K
(assuming 2K ≤ N). Moreover, its dominant eigenvectors (i.e., the eigenvectors corresponding
to its non-zero eigenvalues) belong to the subspace spanned by the columns of V and V, i.e., the
optimal R∗Φ can be written in the form as
R∗Φ = UΛUH , (26)
where Λ is a 2K × 2K positive semi-definite matrix (see (62)), and
U = [V(VHV)−12 V(VHV)−
12 ]. (27)
In the numerical example section, we will optimize the CRB based criteria with respect to Λ
instead of R∗Φ since the dimension of Λ is usually much smaller than that of R∗
Φ, and since the
FIM is also a linear function of Λ. Consequently, the computational complexity is reduced from
O(N6.5) to O(N2.5) for N À K [24].
9

C. Two Closed-Form Optimal Solutions in the Single-Target Case
We present two closed-form optimal waveforms in a single-target case to obtain further insights
into the waveform optimization problem. Like in [10], we assume that the transmit array is linear
and that we choose the reference point for the array so that vH v = 0. When the array is uniform
and linear, for example, the center of the array should be chosen as the reference point in order
to satisfy vH v = 0. Let
Λ =
λ11 λ12
λ∗12 λ22
. (28)
We get (see (11), (12), and (13)):
F11 = L |b|2 [(aHQ−1a) ‖ v ‖2 λ11 + (aHQ−1a) ‖ v ‖‖ v ‖ λ12
+(aHQ−1a) ‖ v ‖‖ v ‖ λ∗12 + (aHQ−1a) ‖ v ‖2 λ22
],
(29)
F12 = Lb∗ ‖ v ‖ [(aHQ−1a) ‖ v ‖ λ11 + (aHQ−1a) ‖ v ‖ λ∗12
], (30)
and
F22 = L (aHQ−1a) ‖ v ‖2 λ11, (31)
where ‖ · ‖ denotes the Euclidean vector norm.
C.1 Angle-Only Criterion
We first consider the Angle-only optimization criterion, as in [10]. We show in Appendix D
that the angle-only optimization problem in the single-target case can be simplified as:
maxλ11,λ22
αλ11 + βλ22 s.t. λ11 + λ22 = P, λ11 > 0, λ22 ≥ 0, (32)
where
α = L|b|2 ‖ v ‖2
[aHQ−1a− |aHQ−1a|2
aHQ−1a
], (33)
and
β = L|b|2 ‖ v ‖2 (aHQ−1a). (34)
This optimization problem can be solved readily when α ≥ β. Indeed, for α > β, the optimal
solution is
λ11 = P, λ22 = 0, (35)
10

which implies that the optimal R∗Φ is given by
R∗Φ =
P
‖ v ‖2vvH . (36)
When α = β, the solution is not unique. In fact, for any 0 < ζ ≤ 1,
R∗Φ =
ζP
‖ v ‖2vvH +
(1− ζ)P‖ v ‖2
vvH (37)
is the optimal solution when α = β. The two terms in (37) represent the so-called sum-beam
and difference-beam components [10]. When α < β, however, the problem is ill-behaved: we can
approach the maximum possible value βP of (32) by using λ11 = ζ and λ22 = P − ζ, where ζ
is small but positive (due to the requirement that λ11 > 0), but we cannot achieve it exactly.
Hence for α < β, the design in (37) with a very small ζ > 0 can get arbitrarily close to the
un-achievable “optimum”.
In [10], a special case is considered, which assumes that the interference and noise covariance
matrix Q = I, ‖ v ‖=‖ a ‖ (i.e., the same number of elements is assumed for both the transmit
and receive arrays), and aHa = 0 (i.e., the receive array is also linear and shares the desired
reference point with the transmit array). For this special case,
α ≥ β ⇐⇒ ‖ a ‖≥‖ v ‖, (38)
and the closed-form solution given above is identical to the one given in [10].
Several observations on the Angle-only criterion for the single-target case are in order. When
α > β, the optimal array transmit beampattern, which is vH(θ)RΦv(θ) as a function of θ, is
basically a delay-and-sum beampattern pointed at the target angle, which is referred to as the
sum-beam in [10]. When α < β, however, the optimum design does not exist, and an “almost
optimal” design puts little energy at the target angle. Putting almost zero energy at the target
is, of course, not practical, resulting in a very large CRB for the amplitude estimate. More
importantly, the angle-only criterion is sensitive to initial angle estimation errors, as will be
shown in Section VI.
11

C.2 Det-Opt Criterion
In the single-target case, we have a closed-form solution for the Det-Opt criterion as follows
(see Appendix E for the detailed derivation):
R∗Φ = P
‖v‖2 vvH , if β ≤ 3α
R∗Φ = 2β
3(β−α)P‖v‖2 vvH + β−3α
3(β−α)P‖v‖2 vvH , if β ≥ 3α.
(39)
Interestingly, the so-obtained optimal waveform covariance matrix R∗Φ is also a linear combination
of the sum-beam and difference-beam components.
V. Numerical Examples
We present several numerical examples demonstrating the effects of range compression in an
angle-range imaging exercise that is tailored to an application of ground moving target indication
(GMTI) via post-Doppler STAP. We also examine the extent to which the optimized MIMO
waveforms improve the CRB of target parameters. Both the transmit and receive arrays are
assumed to be uniform and linear with N = M = 10 antennas. We consider the following
three MIMO radar systems with various antenna configurations: MIMO Radar A(5, 0.5), MIMO
Radar B(0.5, 0.5), and MIMO Radar C(0.5, 5), where the parameters specifying each radar
system are the inter-element spacings (in units of wavelengths) of the transmit and receive arrays,
respectively. We assume a unit complex amplitude for the target of interest. We define the Array
Signal-to-Noise Ratio (ASNR) as PMN/σ2, where P denotes the total transmitted power, M and
N are the numbers of receive and transmit antennas, respectively, and σ2 denotes the variance
of the additive white thermal noise. We use an ASNR = 40 dB in the numerical examples
below. Besides the thermal noise, there is a strong jammer at −5◦ with an array interference-to-
noise ratio (AINR), defined as the incident interference power times M divided by the thermal
noise variance, equal to 100 dB. The jammer waveform is assumed to be uncorrelated with the
waveforms transmitted by the MIMO radar.
To generate uncorrelated MIMO radar waveforms, we employ Hadamard codes [25] with L =
256 samples for each transmitted pulse. The Hadamard codes are orthogonal to each other.
To achieve high range-resolution, the Hadamard codes are scrambled before transmission by a
pseudo-noise (PN) code [25] of length 256.
12

A. Angle-Range Imaging
We present here a numerical example demonstrating the angle-range imaging performance of
MIMO Radar A(5, 0.5) with and without range compression. We simulate a scenario of GMTI
via post-Doppler STAP, i.e., we focus on post-Doppler processing to form angle-range images in
a particular Doppler bin. Consider a scattering field with 64 range bins comprising 10 moving
targets distributed uniformly within the scattering field (the true locations of the moving targets
are indicated by circles in Fig. 2). Each moving target is assumed to have a unit complex
amplitude. The ground return is simulated as “clutter patches” in every range bin, with each
“clutter patch” having complex amplitude 20 and angle −10◦. Hence the clutter due to the
ground is 26 dB stronger than the moving targets. Note that due to the different Doppler
shifts between the moving targets and the stationary ground, each moving target appears at a
different angle from that of the corresponding “clutter patch” simulating the stationary ground
at a particular range-Doppler bin. The closer in angle a moving target is relative to the “clutter
patch” at the same range bin, the slower its velocity.
We assume that there is no secondary data information. We show the angle-range image
formed by the least-squares (LS) approach [14], [16] in Fig. 2(a), which works the same with
or without range compression. Note that the (data-independent) LS approach fails to provide a
clean image due to the presence of the strong jammer and clutter. Figs. 2(c)-2(f) show the angle-
range images formed by using the Capon [26], [14], [16], the Amplitude and Phase EStimation
(APES) [27], [14], [16], the generalized likelihood-ratio test (GLRT) [28], [16], and the refined
Capon and APES (CAPES) [14], [16] methods. All these methods are directly applied to data
without any range-compression. Note that with range-compression, the number of “snapshots”
is reduced from L = 256 to N = 10 in this example. Both APES and GLRT require that
the data snapshot number be larger than the receiving antenna number. Hence APES and
GLRT cannot be directly applied to the data after range-compression (see (5)). Also, Capon
suffers from severe performance degradations due to the very limited sample size after range
compression. Therefore, instead of the Capon method, we use the robust Capon beamforming
(RCB) algorithm [29] for the range-compressed data. Fig. 2(b) shows the image formed by RCB
with a spherical uncertainty parameter ε = 0.1 [29]. Note that RCB performs much better than
13

LS but worse than Capon and APES. The false peak line at θ = −5◦ is due to the presence of the
strong jammer. Despite the fact that the jammer waveform is uncorrelated with the waveforms
transmitted by the MIMO radar, a false peak still exists at every range bin since the jammer
is much stronger than the signals reflected by the moving targets and the snapshot number is
finite. We see from Fig. 2(e) that as expected, we get high GLRT values at the target locations
and low GLRT values at other locations including the jammer location. Note that basically the
GLRT computes the ratio between the estimated power of the desired signal and the estimated
power of the noise and interference in a given direction. Since the strong clutter due to the
ground is distributed in all range bins, its returned echoes overlap significantly. For a particular
range bin, the ground returns from other range bins behave as a strong interference, and hence
we get a small GLRT value at the ground clutter direction. Based on the GLRT values, we
can readily and correctly estimate the number of targets to be 10. To reap the benefits of both
Capon (which has high resolution) and APES (which gives accurate amplitude estimates), the
CAPES method was proposed in [30], which first estimates the peak locations using the Capon
estimator and then refines the amplitude estimates at these locations using the APES estimator.
Showing the result of CAPES only at the locations where the corresponding GLRT values are
above a given threshold (0.2 in our example), we obtain the refined CAPES image in Fig. 2(f),
which provides an accurate description of the moving target scenario.
B. Waveform Optimization
In this sub-section, we consider waveform optimization for the targets in a particular range-
Doppler bin. Both one- and two-target cases are considered.
B.1 Single-Target Case
We first consider a single-target case for a particular range-Doppler bin in the presence of
the same strong jammer as before. We assume that the target is at θ = −16.5◦ and it has a
unit complex amplitude. Figs. 3(a) - 3(d) show the optimized transmit beampatterns obtained
using the Angle-only, Eigen-Opt, Trace-Opt, and Det-Opt criteria for MIMO Radar A(5, 0.5) in
the absence of initial angle estimation error (i.e., the optimization was based on the exact CRB
matrix). Note that for MIMO Radar A(5, 0.5), the Angle-only criterion (using a small ζ in (37))
14

results in a transmit beampattern with a notch at the target angle, while the other criteria place
a peak at the target angle. Note that the peak around the jammer location is actually one of the
grating lobes of the peak at the target angle due to the sparse transmit array. For MIMO Radars
B(0.5, 0.5) and C(0.5, 5), the optimized beampattern (not shown here) is the sum-beam. Hence
the optimal MIMO Radars B(0.5, 0.5) and C(0.5, 5) are identical to the traditional phased-array
radar that transmits a single waveform times the steering vector v(θ).
Our optimization criteria are based on the CRB matrix, which is a function of the target as
well as the noise and interference parameters. In practice, the CRB matrix has to be estimated
using initial parameter estimates. We consider the effect of initial angle estimation errors on the
performance of the waveform optimization for MIMO radar. (All other parameters are assumed
to be exact.) Figs. 4(a) - 4(f) show the root CRB (RCRB) of θ and b as functions of the
error of the initial angle estimate. For comparison purposes, we also show the RCRB when
uncorrelated waveforms are transmitted (i.e., RΦ = (P/N)I), and when the sum-beam (i.e.,
RΦ = (P/N)v∗(θ)vT (θ)) is used for transmission. Note that for MIMO Radar A(5, 0.5), the
sum-beam yields a higher RCRB than the uncorrelated waveforms. This is because for MIMO
Radar A(5, 0.5), the virtual receive array [19], whose steering vector is the Kronecker product
of the receive and transmit steering vectors, is a 100-element filled uniform linear array when
uncorrelated waveforms are transmitted [1], [12], [19]. This virtual receive array aperture is much
larger than that of the 10-element filled uniform linear array for receiving as a result of sum-beam
probing. Although sum-beam probing places more energy on the target, the waveform diversity
(i.e., with different transmit antennas transmitting different waveforms) apparently played a more
important role (due to yielding a much larger virtual receive aperture) in the RCRB for MIMO
Radar A(5, 0.5). In summary, the advantages of MIMO Radar A(5, 0.5) with uncorrelated
waveforms over phased-array radar with sum-beam probing are: much larger coverage area due
to the omni-directional transmit beampattern and much better accuracy for target parameter
estimation.
For MIMO Radar C(0.5, 5), the virtual receive array is also a 100-element filled uniform linear
array when uncorrelated waveforms are transmitted [1], [12], [19], but it does not have much larger
aperture than the 10-element sparse uniform linear array for receiving as a result of sum-beam
probing. In this case, the sum-beam probing is in effect the optimal strategy for all waveform
15

optimization criteria considered. However, using a sparse array for receiving has the problem
that jamming could impinge on the array from an angle close to one of the ambiguous angles of
the target, which leads to a higher RCRB (with or without waveform optimization), compared
to that of MIMO Radar A(5, 0.5), due to the presence of the jammer at −5◦. However, when
the jammer angle is close to the target angle, due to the larger receive aperture of MIMO Radar
C(0.5, 5), as compared to that of MIMO Radar A(5, 0.5), the former is expected to perform
better than the latter. (Due to space limitations, numerical examples corresponding to this case
will not be shown.) If the jammer arrival angle is uniformly distributed across all possible angles,
then the probabilities of severe performance degradation caused by the jammer to MIMO Radars
A and C are about the same, since the former is more sensitive in a broader main-beam area
centered at the target angle and the latter is more sensitive in multiple narrower grating lobe
areas of the target.
For MIMO Radar B(0.5, 0.5), the virtual receive array is a 20-element filled and tapered
uniform linear array when uncorrelated waveforms are transmitted [1], [12], [19], which is not
much larger than the 10-element filled uniform linear array for receiving as a result of sum-beam
probing. The sum-beam probing yields a lower CRB than uncorrelated waveforms.
We next examine more closely the various CRB based waveform optimization results for MIMO
Radars A and B. Note that when the initial angle estimate is accurate, the Angle-only criterion
results in the smallest RCRB, which provides around 10 dB improvement compared to the
uncorrelated waveforms. However, the approach is very sensitive to the error of the initial angle
estimate. Moreover, since this method results in no illumination of the target (see Fig. 3(a)),
the corresponding amplitude RCRB is very high. It appears that the Trace-Opt design gives
the best overall performance and best robustness for all MIMO radar systems considered in this
example, where the target angle units are degrees and the target complex amplitude is 1.
B.2 Two-Target Case
Consider now the two-target case for a particular range-Doppler bin in the presence of the same
strong jammer as before. First, we assume that θ1 = −16.5◦, θ2 = −10◦, b1 = 1 and b2 = 20.
The first target is the target of interest and the second target simulates the ground clutter in the
range-Doppler bin under consideration. We study the performance of waveform optimization in
16

the presence of angle estimation errors for the first target. (All the other parameters are assumed
to be exact.) We found out that the Angle-only criterion is, as before, rather problematic and
sensitive to the initial angle estimation error. We have tried to optimize using the Trace-Opt,
Eigen-Opt, and Det-Opt criteria based on the entire CRB matrix for the two target parameters.
We have also tried to use the generalized criteria to optimize based on the CRB block of the
target of interest only. We found out that waveform optimization based on the entire CRB
matrix gives slightly worse performance than that based only on the CRB block of the target
of interest. Again, the Trace-Opt design appeared to provide the best overall performance in
terms of accuracy and robustness. Consequently, in what follows, we show the Trace-Opt results
obtained by minimizing the trace of the CRB of the target of interest only.
Fig. 5 shows the transmit beampatterns for MIMO Radars A and B, obtained using the
Trace-Opt criterion, in the absence of initial angle estimation error. Fig. 6 shows the RCRB
curves for the parameters of the target of interest, i.e., for θ1 and b1, for MIMO Radars A
and B. For comparison purposes, we also show the RCRB when uncorrelated waveforms are
transmitted (i.e., RΦ = (P/N)I), and when the sum-beam (i.e., RΦ = (P/N)v∗(θ1)vT (θ1)) is
used for transmission. Note that the optimized waveforms give an approximately 6 dB lower
CRB for the parameters of the target of interest than the uncorrelated waveforms. Note also
that for both MIMO Radars A and B, using the sum-beam gives worse (much worse for MIMO
Radar A(5, 0.5)) performance than using uncorrelated waveforms. Hence for this case of multiple
targets, compared to the previous single-target case, the effect of waveform diversity plays an
even more important role than the effect of increased power at the targets provided by the
sum-beam transmission.
Finally, we assume that the first target angle is θ1 = −(10 + ∆θ)◦, while all other parameters
are the same as in the previous example. Fig. 7 shows the CRB improvement obtained using the
Trace-Opt design, as compared to using the uncorrelated waveforms, as a function of the angle
separation ∆θ between the two targets, in the absence of initial angle estimation errors. We
note that for MIMO Radar A(5, 0.5) and for very small ∆θ, the uncorrelated waveforms give the
same CRB as the optimal waveforms. However, for the other cases shown in Fig. 7, the optimal
waveforms provide a gain over the uncorrelated waveforms that ranges from 4 dB to 7.5 dB.
17

VI. Conclusions
We have considered the question of “to compress or not to compress” for MIMO radar from
both Cramer-Rao Bound (CRB) and sufficient statistic perspectives. We have shown that under
our assumptions, the CRB matrix does not change either way, but the range compressed data
matrix does not form a sufficient statistic for the unknown target parameters. We have also
investigated MIMO radar waveform optimization using several criteria based on the CRB matrix.
We have found that minimizing the trace of the CRB of the target parameters of interest appears
to give a good overall performance in terms of lowering the CRB for the said target as well as
possessing robustness against initial parameter estimation errors. Numerical examples have been
provided to demonstrate the effectiveness of the proposed optimization approaches.
Appendix A. Cramer-Rao Bound
Consider the data model in (1) or (2). Let
bR = Re(b) and bI = Im(b). (40)
We can readily verify that the Fisher information matrix (FIM) associated with (1) is a block-
diagonal matrix with respect to the unknowns in Q, on one hand, and those in θ and b, on the
other. Therefore, because our main interest is in the target parameters, we need to calculate the
Fisher information matrix only with respect to θ, bR, and bI . (We consider one-dimensional
target angles for the sake of discussion simplicity.) Note that (see, e.g., [31]):
F (θi, θj) = 2Re tr[∂(ABVTΦ)H
∂θiQ−1 ∂(ABVTΦ)
∂θj
], (41)
and that∂(ABVTΦ)
∂θi= AeieT
i BVTΦ + ABeieTi VTΦ, (42)
where ei denotes the ith column of the identity matrix, tr(·) denotes the trace of a matrix, and
A and V are defined in (14) and (15), respectively. Then
F (θi, θj) = 2 Re tr[(
AeieTi BVTΦ + ABeieT
i VTΦ)H
Q−1(AejeT
j BVTΦ + ABejeTj VTΦ
)].
(43)
18

Next note that
tr[(
AeieTi BVTΦ
)HQ−1
(AejeT
j BVTΦ)]
= eTi
(AHQ−1A
)ejeT
j
(BVTΦΦHV∗BH
)ei
= L(AHQ−1A
)ij
(B∗VHR∗
ΦVB)ij
, (44)
where Xij denotes the (i, j)th element of X, and we have used the facts that tr(ABC) =
tr(BCA), that B is a diagonal matrix, and that RΦ is Hermitian symmetric. The other three
matrix product terms in (43) have similar forms. Hence,
F (θi, θj) = 2Re[F11]ij , i.e., F(θ, θ) = 2Re(F11), (45)
with F11 given in (11).
Similarly, we have∂(ABVTΦ)
∂bRi
= AeieTi VTΦ, (46)
and∂(ABVTΦ)
∂bIi
= jAeieTi VTΦ. (47)
Hence
F(θ,bR) = FT (bR, θ) = 2Re(F12), (48)
and
F(θ,bI) = FT (bI , θ) = −2 Im(F12), (49)
where F12 is given in (12).
We also have
F(bR,bR) = F(bI ,bI) = 2 Re(F22), (50)
and
F(bR,bI) = FT (bI ,bR) = −2 Im(F22), (51)
with F22 given in (13).
From (45), (48) - (51), Equation (10) follows immediately.
19

Appendix B. Sufficient Statistic
Roughly speaking, Y in (5) is a sufficient statistic for X in (2) if Y contains all the information
in the observed sample X regarding the unknown target parameters b and θ [32], [33].
Consider first the case where the interference and noise covariance matrix Q is known a priori.
In such a case, the probability density function (pdf) of X has the form:
f(X|θ,b) =1
πML|Q|L exp{− tr
[Q−1(X−ABVTΦ)(X−ABVTΦ)H
]}(52)
=1
πML|Q|L exp{−L tr[Q−1RX ]
} · (53)
exp{
2 Re tr(Q−1ABVT(ΦΦH
)1/2YH)− L tr[Q−1ABVTRΦV∗BHAH ]
},(54)
where RX = 1LXXH and | · | denotes the determinant of a matrix. Note that (53) does not
contain b and θ, and (54) does not contain any other statistic besides Y. Hence, based on
the Factorization Theorem [33], Y is a sufficient statistic for X regarding the unknown target
parameters b and θ.
Consider next the case where the interference and noise covariance matrix Q is unknown.
From (53) and (54), we see that the pdf of X can be written as a product of a constant and a
function of RX and Y as well as the unknown target parameters. Hence, Y and RX form a
sufficient statistic for b, θ, and Q in this case.
Several remarks are now in order:
• Note that in (54) Y, b and θ are coupled with the unknown Q, and in (53) Q is coupled with
RX . Therefore, apparently, we cannot write the pdf of X as a product of a function containing
only Y, b and θ (but not Q), and a function not containing θ and b. Hence, Y is not a sufficient
statistic for b and θ when Q is unknown.
• In the space-time adaptive processing (STAP) based ground moving target indication (GMTI)
applications [34] [35] [36], the covariance matrix of the interference (including the ground clutter)
and noise may be estimated from secondary range bins. If this estimate is considered to be
accurate enough for the primary range bin, then Y is a sufficient statistic for θ and b. However,
in general, Y is not a sufficient statistic for θ and b since the covariance matrix of the interference
and noise cannot be estimated accurately.
• We can also readily show that when the interference and noise covariance matrix is known to
20

be a scaled identity matrix with the scaling factor being unknown, Y is also a sufficient statistic
for θ and b. However, in practice, the case where the covariance matrix of the interference and
noise is known to be spatially and temporally white rarely occurs, if at all.
• It is interesting to note that almost all estimators considered in [16], viz. Capon, APES, GLRT,
MUSIC, and maximum likelihood, depend on the sufficient statistic Y and RX .
Appendix C. Structure of the Optimal Waveform Covariance Matrix
Let
R∗Φ = ∆∆H . (55)
Decompose ∆ additively as
∆ = PU∆ + P⊥U∆, (56)
where PU denotes the orthogonal projection onto the subspace spanned by the columns of U
in (27), or the columns of V and V, and P⊥U = I − PU , with I denoting the identity matrix.
Therefore, we can decompose R∗Φ as a sum of the following four components:
R∗Φ = PU∆∆HPU + RΦ, (57)
where
RΦ = P⊥U∆∆HP⊥
U + PU∆∆HP⊥U + P⊥
U∆∆HPU . (58)
It can be readily verified that
VHRΦV = VHRΦV = VHRΦV = VHRΦV = 0. (59)
Substituting (57) into (11), (12), and (13), and observing (59), show that the FIM does not
depend on RΦ.
Next note that
tr(RΦ) = tr(P⊥
U∆∆HP⊥U + PU∆∆HP⊥
U + P⊥U∆∆HPU
)
= tr(P⊥U∆∆HP⊥
U )
= ‖ ∆HP⊥U ‖2
F
≥ 0, (60)
21

where ‖ · ‖F denotes the Frobenius matrix norm. The equality in (60) holds if and only if
∆HP⊥U = 0, which implies RΦ = 0 (see (58)).
Hence, we have proved that, while the CRB does not depend on trRΦ, an RΦ 6= 0 will
increase tr(RΦ) compared with the case of RΦ = 0. The conclusion is that under the total power
constraint, i.e., tr (RΦ) = P , we necessarily must have tr(RΦ) = 0, i.e., RΦ = 0. Hence,
R∗Φ = PU∆∆HPU , UΛUH , (61)
where
Λ = (UHU)−1UH∆∆HU(UHU)−1. (62)
Appendix D.Closed-Form Optimal Solutions for the Angle-Only Criterion
For the single-target case, we have
CRB(θ) = 0.5F−111.2, (63)
where
F11.2 , F11 − F12F−122 F ∗
12. (64)
Substituting (29) - (31) into (64) yields:
F11.2 = L|b|2 ‖ v ‖2
[aHQ−1a− |aHQ−1a|2
aHQ−1a
]λ11
+L|b|2 ‖ v ‖2
[(aHQ−1a)λ22 − (aHQ−1a)
|λ12|2λ11
](65)
≤ αλ11 + βλ22, (66)
where α and β are defined in (33) and (34), respectively. The equality in (66) holds if and only
if λ12 = 0. After some straightforward manipulations, (32) follows immediately.
Appendix E. Closed-Form Optimal Solutions for the Det-Opt Criterion
The determinant of the FIM is given by:
|FIM| = F11.2
∣∣∣∣∣∣
Re(F22) − Im(F22)
Im(F22) Re(F22)
∣∣∣∣∣∣(67)
= L2F11.2 (aHQ−1a)2 ‖ v ‖4 λ211 (68)
≤ η(αλ11 + βλ22)λ211, (69)
22

where η is a positive constant, and the equality holds if and only if λ12 = 0. Thus the optimization
problem under the Det-Opt criterion can be written as:
maxλ11,λ22
(αλ11 + βλ22)λ211 s.t. λ11 + λ22 = P, λ11 > 0, λ22 ≥ 0, (70)
which is equivalent to:
maxλ11
[(α− β)λ11 + βP ] λ211 s.t. 0 < λ11 ≤ P. (71)
When β ≤ 3α, the cost function in (71) is a monotonically increasing function of λ11 for λ11
in (0, P ] and hence the optimal solution is λ11 = P . Otherwise, λ11 = 2βP3(β−α) is the optimal
solution. Therefore, we have the closed-form solution in (39).
References
[1] D. W. Bliss and K. W. Forsythe, “Multiple-input multiple-output (MIMO) radar and imaging: degrees offreedom and resolution,” 37th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA,vol. 1, pp. 54–59, November 2003.
[2] D. J. Rabideau and P. Parker, “Ubiquitous MIMO multifunction digital array radar,” 37th Asilomar Confer-ence on Signals, Systems and Computers, Pacific Grove, CA, November 2003.
[3] I. Bekkerman and J. Tabrikian, “Spatially coded signal model for active arrays,” The 2004 IEEE InternationalConference on Acoustics, Speech, and Signal Processing, Montreal, Quebec, Canada, vol. 2, pp. ii/209–ii/212,March 2004.
[4] E. Fishler, A. Haimovich, R. Blum, D. Chizhik, L. Cimini, and R. Valenzuela, “MIMO radar: an idea whosetime has come,” Proceedings of the IEEE Radar Conference, pp. 71–78, April 2004.
[5] E. Fishler, A. Haimovich, R. Blum, L. Cimini, D. Chizhik, and R. Valenzuela, “Performance of MIMO radarsystems: advantages of angular diversity,” 38th Asilomar Conference on Signals, Systems and Computers,Pacific Grove, CA, vol. 1, pp. 305–309, November 2004.
[6] K. Forsythe, D. Bliss, and G. Fawcett, “Multiple-input multiple-output (MIMO) radar: performance is-sues,” 38th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, vol. 1, pp. 310–315,November 2004.
[7] D. R. Fuhrmann and G. S. Antonio, “Transmit beamforming for MIMO radar systems using partial sig-nal correlation,” 38th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, vol. 1,pp. 295–299, November 2004.
[8] F. C. Robey, S. Coutts, D. D. Weikle, J. C. McHarg, and K. Cuomo, “MIMO radar theory and experimentalresults,” 38th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, vol. 1, pp. 300–304, November 2004.
[9] J. Tabrikian and I. Bekkerman, “Transmission diversity smoothing for multi-target localization,” The 2005IEEE International Conference on Acoustics, Speech, and Signal Processing, Philadelphia, PA, vol. 4,pp. iv/1041–iv/1044, March 2005.
[10] K. W. Forsythe and D. W. Bliss, “Waveform correlation and optimization issues for MIMO radar,” 39thAsilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, pp. 1306–1310, November2005.
[11] E. Fishler, A. Haimovich, R. Blum, L. Cimini, D. Chizhik, and R. Valenzuela, “Spatial diversity in radars- models and detection performance,” IEEE Transactions on Signal Processing, vol. 54, pp. 823–838, March2006.
[12] J. Li and P. Stoica, “MIMO radar – diversity means superiority,” The Fourteenth Annual Workshop onAdaptive Sensor Array Processing, MIT Lincoln Laboratory, Lexington, MA, June 2006.
[13] J. Tabrikian, “Barankin bounds for target localization by MIMO radars,” 4th IEEE Workshop on SensorArray and Multi-channel Processing, Waltham, MA, July 2006.
[14] L. Xu, J. Li, and P. Stoica, “Adaptive techniques for MIMO radar,” 4th IEEE Workshop on Sensor Arrayand Multi-channel Processing, Waltham, MA, July 2006.
23

[15] V. F. Mecca, D. Ramakrishnan, and J. L. Krolik, “MIMO radar space-time adaptive processing for multipathclutter mitigation,” 4th IEEE Workshop on Sensor Array and Multi-channel Processing, Waltham, MA, July2006.
[16] L. Xu, J. Li, and P. Stoica, “Radar imaging via adaptive MIMO techniques,” 14th European Sig-nal Processing Conference, (invited), Florence, Italy, September 2006. (available on the website:ftp://www.sal.ufl.edu/xuluzhou/EUSIPCO2006.pdf).
[17] J. Li, P. Stoica, and Y. Xie, “On probing signal design for MIMO radar,” 40th Asilomar Conference onSignals, Systems and Computers (invited), Pacific Grove, CA, October 2006.
[18] I. Bekkerman and J. Tabrikian, “Space-time coding for active arrays,” IEEE Transactions on Signal Process-ing, 2006, to appear.
[19] J. Li, P. Stoica, L. Xu, and W. Roberts, “On parameter identifiability of MIMO radar,” IEEE Signal Pro-cessing Letters, to appear.
[20] L. Vandenberghe, S. Boyd, and S. P. Wu, “Determinant maximization with linear matrix inequality con-straints,” SIAM Journal on Matrix Analysis and Applications, vol. 19, pp. 499–533, April 1998.
[21] S. P. Wu, L. Vandenberghe, and S. Boyd, Software for Determinant Maximization Problems. User’s Guide,Alpha Version. Stanford University, Stanford, CA, 1996.
[22] J. F. Sturm, “Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric cones,”Optimization Methods and Software Online, vol. 11-12, pp. 625–653, Oct. 1999. Available:http://www2.unimaas.nl/ sturm/software/sedumi.html.
[23] J. Lofberg, “YALMIP : A toolbox for modeling and optimization in MATLAB,” The 2004 IEEE InternationalSymposium on Computer Aided Control Systems Design, Taipei, Taiwan, pp. 284–289, September 2004.Available from http://control.ee.ethz.ch/~joloef/yalmip.php.
[24] Y. Labit, D. Peaucelle, and D. Henrion, “SEDUMI interface 1.02 - A tool for solving LMI problems withSEDUMI,” IEEE International Symposium on Computer, Glasgow, U.K., pp. 272–277, September 2002.
[25] J. G. Proakis, Digital Communications. Fourth Edition, McGraw Hill, 2001.[26] J. Capon, “High resolution frequency-wavenumber spectrum analysis,” Proceedings of the IEEE, vol. 57,
pp. 1408–1418, August 1969.[27] J. Li and P. Stoica, “An adaptive filtering approach to spectral estimation and SAR imaging,” IEEE Trans-
actions on Signal Processing, vol. 44, pp. 1469–1484, June 1996.[28] E. J. Kelly, “Finite-sum expressions for signal detection probabilities,” Technical Report 566, Lincoln Labo-
ratory, M.I.T, May 1981.[29] J. Li, P. Stoica, and Z. Wang, “On robust Capon beamforming and diagonal loading,” IEEE Transactions on
Signal Processing, vol. 51, pp. 1702–1715, July 2003.[30] A. Jakobsson and P. Stoica, “Combining Capon and APES for estimation of spectral lines,” Circuits, Systems,
and Signal Processing, vol. 19, no. 2, pp. 159–169, 2000.[31] P. Stoica and R. L. Moses, Spectral Analysis of Signals. Upper Saddle River, NJ: Prentice-Hall, 2005.[32] S. M. Kay, Fundamentals of Statistical Signal Processing: Estimation Theory. Upper Saddle River, New
Jersey: Prentice Hall, 1993.[33] G. Casella and R. L. Berger, Statistical Inference (2nd Edition). Thomson Learning, Inc., 2002.[34] J. Ward, “Space-time adaptive processing for airborne radar,” Technical Report 1015, MIT Lincoln Labora-
tory, December 1994.[35] R. Klemm, Principles of Space-Time Adaptive Processing. London, U.K.: IEE Press, 2002.[36] J. R. Guerci, Space-Time Adaptive Processing for Radar. Norwood, MA: Artech House, 2003.
24

Angle (deg)
Ran
ge
−30 −20 −10 0 10 20 30
10
20
30
40
50
60
−50
−45
−40
−35
−30
−25
−20
−15
−10
−5
0
Angle (deg)
Ran
ge
−30 −20 −10 0 10 20 30
10
20
30
40
50
60
−50
−45
−40
−35
−30
−25
−20
−15
−10
−5
0
(a) (b)
Angle (deg)
Ran
ge
−30 −20 −10 0 10 20 30
10
20
30
40
50
60
−50
−45
−40
−35
−30
−25
−20
−15
−10
−5
0
Angle (deg)
Ran
ge
−30 −20 −10 0 10 20 30
10
20
30
40
50
60
−50
−45
−40
−35
−30
−25
−20
−15
−10
−5
0
(c) (d)
Angle (deg)
Ran
ge
−30 −20 −10 0 10 20 30
10
20
30
40
50
600.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Angle (deg)
Ran
ge
−30 −20 −10 0 10 20 30
10
20
30
40
50
60
−50
−45
−40
−35
−30
−25
−20
−15
−10
−5
0
(e) (f)
Fig. 2. Angle-range images formed with MIMO Radar A(5, 0.5) via using uncorrelated waveforms and(a) LS, (b) RCB with range compression and ε = 0.1, (c) Capon, (d) APES, (e) GLRT, and (f) refinedCAPES. The images in (c)-(f) are obtained without range compression.
25

−20 −15 −10 −5 0−30
−25
−20
−15
−10
−5
0
Angle (deg)
Bea
mpa
ttern
(dB
)
−20 −15 −10 −5 0−30
−25
−20
−15
−10
−5
0
Angle (deg)
Bea
mpa
ttern
(dB
)
(a) (b)
−20 −15 −10 −5 0−30
−25
−20
−15
−10
−5
0
Angle (deg)
Bea
mpa
ttern
(dB
)
−20 −15 −10 −5 0−30
−25
−20
−15
−10
−5
0
Angle (deg)
Bea
mpa
ttern
(dB
)
(c) (d)
Fig. 3. Optimal transmit Beampatterns for MIMO Radar A(5, 0.5) in the single-target case, whenθ = −16.5◦ and b = 1, formed by (a) Angle-Only, (b) Eigen-Opt, (c) Trace-Opt, and (d) Det-Opt.
26

−3 −2 −1 0 1 2 310
−3
10−2
10−1
100
Error of Initial Angle Estimate (deg)
Roo
t CR
B o
f Ang
le (
deg)
Uncorrelated WaveformsSum−BeamAngle−onlyEigen−OptTrace−OptDet−Opt
−3 −2 −1 0 1 2 310
−2
10−1
100
101
Error of Initial Angle Estimate (deg)
Roo
t CR
B o
f Am
plitu
de
Uncorrelated WaveformsSum−BeamAngle−onlyEigen−OptTrace−OptDet−Opt
(a) (b)
−3 −2 −1 0 1 2 310
−3
10−2
10−1
100
Error of Initial Angle Estimate (deg)
Roo
t CR
B o
f Ang
le (
deg)
Uncorrelated WaveformsSum−BeamAngle−onlyEigen−OptTrace−OptDet−Opt
−3 −2 −1 0 1 2 310
−2
10−1
100
101
Error of Initial Angle Estimate (deg)
Roo
t CR
B o
f Am
plitu
de
Uncorrelated WaveformsSum−BeamAngle−onlyEigen−OptTrace−OptDet−Opt
(c) (d)
−3 −2 −1 0 1 2 310
−3
10−2
10−1
100
Error of Initial Angle Estimate (deg)
Roo
t CR
B o
f Ang
le (
deg)
Uncorrelated WaveformsSum−BeamAngle−onlyEigen−OptTrace−OptDet−Opt
−3 −2 −1 0 1 2 310
−2
10−1
100
101
Error of Initial Angle Estimate (deg)
Roo
t CR
B o
f Am
plitu
de
Uncorrelated WaveformsSum−BeamAngle−onlyEigen−OptTrace−OptDet−Opt
(e) (f)
Fig. 4. The root Cramer-Rao bound versus initial angle estimate error for the single-target case whenθ = −16.5◦ and b = 1. (a) Root CRB of θ for MIMO Radar A(5, 0.5), (b) root CRB of b for MIMO RadarA(5, 0.5), (c) root CRB of θ for MIMO Radar B(0.5, 0.5), (d) root CRB of b for MIMO Radar B(0.5,0.5), (e) root CRB of θ for MIMO Radar C(0.5, 5), and (f) root CRB of b for MIMO Radar C(0.5, 5).
27

−20 −15 −10 −5 0−30
−25
−20
−15
−10
−5
0
Angle (deg)
Bea
mpa
ttern
(dB
)
−20 −15 −10 −5 0−30
−25
−20
−15
−10
−5
0
Angle (deg)
Bea
mpa
ttern
(dB
)
(a) (b)
Fig. 5. Optimal transmit Beampatterns for the two-target case, when θ1 = −16.5◦, θ2 = −10◦, b1 = 1,and b2 = 20, formed by Trace-Opt for (a) MIMO Radar A(5, 0.5) and (b) MIMO Radar B(0.5, 0.5).
−3 −2 −1 0 1 2 310
−3
10−2
10−1
100
101
Error of Initial Angle Estimate (deg)
Roo
t CR
B o
f Ang
le (
deg)
Uncorrelated WaveformsSum−BeamTrace−Opt
−3 −2 −1 0 1 2 310
−2
10−1
100
101
Error of Initial Angle Estimate (deg)
Roo
t CR
B o
f Am
plitu
de
Uncorrelated WaveformsSum−BeamTrace−Opt
(a) (b)
−3 −2 −1 0 1 2 310
−3
10−2
10−1
100
101
Error of Initial Angle Estimate (deg)
Roo
t CR
B o
f Ang
le (
deg)
Uncorrelated WaveformsSum−BeamTrace−Opt
−3 −2 −1 0 1 2 310
−2
10−1
100
101
Error of Initial Angle Estimate (deg)
Roo
t CR
B o
f Am
plitu
de
Uncorrelated WaveformsSum−BeamTrace−Opt
(c) (d)
Fig. 6. The root Cramer-Rao bound versus initial angle estimate errors in θ1 for the two-target case,when θ1 = −16.5◦, θ2 = −10◦, b1 = 1, and b2 = 20. (a) Root CRB of θ1 for MIMO Radar A(5, 0.5), (b)root CRB of b1 for MIMO Radar A(5, 0.5), (c) root CRB of θ1 for MIMO Radar B(0.5, 0.5), and (d) rootCRB of b1 for MIMO Radar B(0.5, 0.5).
28

0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
Angle Separation (deg)
CR
B Im
prov
emen
t (dB
)
0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
Angle Separation (deg)
CR
B Im
prov
emen
t (dB
)
(a) (b)
0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
Angle Separation (deg)
CR
B Im
prov
emen
t (dB
)
0 2 4 6 8 100
1
2
3
4
5
6
7
8
9
10
Angle Separation (deg)
CR
B Im
prov
emen
t (dB
)
(c) (d)
Fig. 7. Cramer-Rao bound improvement corresponding to optimized waveforms obtained using the Trace-Opt criterion, compared with the case of uncorrelated waveforms, as a function of the angle separationbetween the two targets for (a) θ1 for MIMO Radar A(5, 0.5), (b) b1 for MIMO Radar A(5, 0.5), (c) θ1
for MIMO Radar B(0.5, 0.5), and (d) b1 for MIMO Radar B(0.5, 0.5).
29