Quantitative Risk Evaluation of Obstacle Limitation ...
18
Available online at http://docs.lib.purdue.edu/jate Journal of Aviation Technology and Engineering 5:2 (2016) 51–68 Quantitative Risk Evaluation of Obstacle Limitation Surfaces for Final Approaches at Airports Amila Silva and Alexandre G. de Barros (University of Calgary) Abstract Obstacle limitation surfaces (OLS) are the main safeguard against objects that can pose a hazard to aircraft operations at and around airports. The standard dimensions of the most of those surfaces were estimated using the pilot’s experience at the time when they were included in the standard documents. As a result, some of these standards may have been overestimated, while others may not provide an adequate level of safety. With airports moving to the Safety Management System (SMS) approach to design and operations safety, proper evaluation of the level of safety provided by OLS at specific sites becomes important to airport operators. Therefore, this study attempts to collect actual flight path data using information provided by air traffic control radars and to construct a methodology to assess the probability of aircraft deviating from their approach path. This will be helpful to estimate safe and efficient standard dimensions of the OLS and assess the risk level of objects to the aircraft operations around airports. The methodology is presented using the aircraft trajectories of approaches at Ottawa International Airport (CYOW). Estimated dimensions of Code 3 approach surfaces also are presented. Keywords: obstacle limitation surfaces, aviation safety, quantitative risk analysis About the Authors Amila Silva is a graduate student in the Department of Civil Engineering at the University of Calgary, Canada. He completed a master’s degree in transportation engineering at the University of Moratuwa in Sri Lanka. His research interests are transportation safety, airport engineering, and transportation planning. Alexandre G. de Barros is an associate professor in the Department of Civil Engineering at the University of Calgary, Canada. He received his MSc in operations research and transportation in 1994 from the Instituto Tecnolo ´gico de Aerona ´utica, Brazil, and his PhD in transportation engineering in 2001 from the University of Calgary. He has several years of experience both in academia and in industry, where he worked as a consultant in transportation planning and airport planning and engineering. He also is the former director of the Airport Infrastructure of the Brazilian National Civil Aviation Agency. He has several publications in aviation, airports, and traffic safety. His research interests are highway design and safety, airport safety, and airport design standards. http://dx.doi.org/10.7771/2159-6670.1110
Transcript of Quantitative Risk Evaluation of Obstacle Limitation ...

Available online at http://docs.lib.purdue.edu/jate
Journal of Aviation Technology and Engineering 5:2 (2016) 51–68
Quantitative Risk Evaluation of Obstacle Limitation Surfacesfor Final Approaches at Airports
Amila Silva and Alexandre G. de Barros
(University of Calgary)
Abstract
Obstacle limitation surfaces (OLS) are the main safeguard against objects that can pose a hazard to aircraft operations at and aroundairports. The standard dimensions of the most of those surfaces were estimated using the pilot’s experience at the time when they wereincluded in the standard documents. As a result, some of these standards may have been overestimated, while others may not provide anadequate level of safety. With airports moving to the Safety Management System (SMS) approach to design and operations safety, properevaluation of the level of safety provided by OLS at specific sites becomes important to airport operators. Therefore, this study attempts tocollect actual flight path data using information provided by air traffic control radars and to construct a methodology to assess theprobability of aircraft deviating from their approach path. This will be helpful to estimate safe and efficient standard dimensions of theOLS and assess the risk level of objects to the aircraft operations around airports. The methodology is presented using the aircrafttrajectories of approaches at Ottawa International Airport (CYOW). Estimated dimensions of Code 3 approach surfaces also are presented.
Keywords: obstacle limitation surfaces, aviation safety, quantitative risk analysis
About the Authors
Amila Silva is a graduate student in the Department of Civil Engineering at the University of Calgary, Canada. He completed a master’s degree intransportation engineering at the University of Moratuwa in Sri Lanka. His research interests are transportation safety, airport engineering, andtransportation planning.
Alexandre G. de Barros is an associate professor in the Department of Civil Engineering at the University of Calgary, Canada. He received his MSc inoperations research and transportation in 1994 from the Instituto Tecnologico de Aeronautica, Brazil, and his PhD in transportation engineering in 2001from the University of Calgary. He has several years of experience both in academia and in industry, where he worked as a consultant in transportationplanning and airport planning and engineering. He also is the former director of the Airport Infrastructure of the Brazilian National Civil Aviation Agency.He has several publications in aviation, airports, and traffic safety. His research interests are highway design and safety, airport safety, and airport designstandards.
http://dx.doi.org/10.7771/2159-6670.1110

Introduction
Aerodrome design standards are the main frameworkused for planning and design of airport facilities. They wereestablished over 60 years ago in order to maintain safeaircraft movements at and around aerodromes. Obstaclelimitation surfaces (OLS) are part of aerodrome standards.They are a set of imaginary surfaces defined at and aroundairports to protect airborne aircraft operations fromobstacles that can pose a hazard to their movements.Most often, those safety surfaces extend well beyond theairport property and, as a result, certain areas aroundairports are considered as integral parts of the aerodromeenvironment (ICAO, 1983). Furthermore, OLS are identi-fied as an important design standard affecting theorientation of the runway system layout.
Internationally agreed standards for airport design wereestablished as Annex 14 to the Chicago Convention onCivil Aviation (ICAO, 1999). However, each country usesits own standards for planning criteria related to aero-dromes. Although most of those national standards arebased on Annex 14, some countries may elect to developand adopt their own standards. AC 150/5300-13 in theUSA (FAA, 2004), TP 312 in Canada (Transport_Canada,1993), and CAP 168 in the United Kingdom (CAA, 2011)are examples of national standards used in differentcountries. In all those standards, shapes and dimensionsof the OLS and their objectives are defined. A carefulreview of those standards reveals that there are somedifferences in dimensions and shapes of OLS among thosedocuments. For instance, in contrast to the trapezium shapelongitudinal cross section of obstacle free zone (OFZ)prescribed by the International Civil Aviation Organization(ICAO), a rectangular section is defined in FederalAviation Administration (FAA) standards (FAA, 2004).Generally, aviation safety organizations allow deviationsfrom these standards when designing the airfields, if thedesigner can prove that an adequate of level of safety isachieved.
According to ICAO (1983), the significance of anyexisting or proposed objects to the safety of aircraftoperations within the aerodrome boundary or vicinity of theaerodrome is assessed by the use of two separate sets ofcriteria defining airspace requirements. Obstacle limitationsurfaces are the main standard defined in Annex 14 tominimize the collision risk of airborne aircraft near airports.The second set of criteria comprises obstacle assessmentsurfaces (OAS), also known as PANS-OPS surfaces(ICAO, 2006; Litesheim & Xiao, 2006). The main purposeof PANS-OPS surfaces or OAS is to provide guidance forprocedure designers to estimate the obstacle clearanceheight (OCH) in an airport and assess the risk of obstaclesnear the runways. OCH is the height at which aircraft caninitiate a missed approach in a low visibility conditionwhen it uses the instrument approach procedures. Pilots are
only allowed to descend below this level if they have clearsight that the aircraft is correctly aligned with the runwayand there are sufficient visual cues to continue theapproach.
The height of the objects that penetrate the OASsurfaces, the characteristics of aircraft, and navigationfacilities at a runway are used to calculate its OCH usingthe OAS. The OAS consists of six sloping plane surfaceswhose shape and dimensions are determined by linearequations. The coefficients and constants of those equa-tions are available in the PANS-OPS OAS softwareprovided by ICAO.
In coming years, it is expected that air transportation willexperience greater growth than what has been observedduring the last decade. With this expected traffic growth,airports will need to expand their facilities to increaseaircraft operation capacity (Hall et al., 2008). In suchsituations, it may be impractical or impossible to meet therequirements of existing OLS standards due to spacelimitations at and around airports. As a result, airports mayhave to use new dimensions for the OLS and check thelevel of safety of the modified surfaces.
A thorough review of the literature has identified veryfew studies done to justify the level of safety of existing ormodified OLS standards, plus a few studies that werecarried out to measure the level of safety of OFZs usingsimulated flight paths (Eddowes, Hancox, & MacInnes,2001; ICAO, 2005b). Recently, studies done by Fricke andThiel (2013) assessed the level of safety provided by OLSand PANS-OPS using the radar data. The methodologypresented in their studies did not consider the dependencybetween the lateral and vertical deviation data thatsignificantly affects the analysis results. Other studies havefocused on the flight path deviation analysis (Thiel &Fricke, 2010; Thiel, Seiß, Vogel, & Fricke, 2012). Marcoand Auria (2014) analyzed the flight trajectories generatedwith 6 degrees of freedom (6DoF) flight simulations anddeveloped a methodology to calculate the collision riskwith objects near airports. The analysis was based on thesimulated flight paths generated by Monte Carlo simula-tion. Cramer and Rodriguez (2013) studied the pathsteering error (PSE) effect on the calculated lateral aircraftdeviation. PSE is defined as distance from estimatedaircraft position to a beam point on the lateral computedpath. In that study, the effect of the total system error on thecalculated aircraft deviation was studied. There also arecomputer programmes such as SAT-P, PDToolKit(MITRE, 2015) available commercially to identify thehazardous obstacles with respect to the existing standards.
In the 1960s, a joint effort by the FAA’s flight standardsorganization and ICAO’s obstacle clearance panel (OCP)developed the collision risk model (CRM) for instrumentlanding system (ILS) operations. The main objective of thismodel was to determine the area that needed to be protectedwhen an aircraft is making an ILS approach. This model is
52 A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering

still being used to assess the risk of obstacles below thedecision height (DH) in ILS operation by aviationauthorities. The main shortcoming of the model is that itcan only be used to analyze the ILS approaches. Therefore,it only considers the instrumental errors of the ILS system.However, deviation due to aircraft characteristics, pilottechniques, and weather condition are ignored in the model(ICAO, 1980).
It was found that in most recent studies related to airportstandards, the dimensions of a safety standard can varywith respect to the geographical location of an airport andlocal weather condition (Eddowes et al., 2001). Therefore,it is more cost effective if an airport can estimate therequired dimensions of OLS according to their localweather and geographical conditions. The expected movein the United States and Canada to a Safety ManagementSystems (SMS) approach to airport regulation (ICAO,2012) confirms this perception. To address this rising issue,this study proposes a methodology to estimate theprobability of aircraft deviation from standard flight pathsusing actual flight trajectories. Moreover, an extension ofthe methodology can be used to estimate the dimensions ofthe OLS that provide the acceptable level of safety for air-craft operations. The analysis is presented using the aircrafttrajectories at Ottawa International Airport (CYOW). As anexample, approach surface dimensions for ICAO Code 3instrument and non-instrument were estimated and com-pared with the existing OLS and PANS-OPS surfacedimensions.
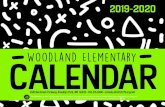
According to ICAO (1999), the objective of the approachsurface is to protect the aircraft when approaching arunway. Its dimensions depend on the aircraft code numberand the approach category. The aircraft code numbermainly represents the kinetic energy of an aircraft on finalapproach, using the aircraft’s reference field length as a
proxy. The approach category represents the type ofapproach (i.e., visual or instrument, precision or non-precision) according to weather conditions and availablenavigation instruments. The standard dimensions andgeometric shape of the approach surface are shown inTable 1 and Figure 1.
To the best of our knowledge, there are no studiespublicly available that explain the rationale for the ICAOstandards presented in Table 1. By analyzing actual aircrafttrajectories, one can estimate the probability density func-tions of deviations from the standard flight path. Theseprobability density functions can then be used to determinethe risk of a collision between an aircraft and objects—existing or hypothetical—located in the proximity of theaircraft’s path. Such analysis can then be used both todetermine the level of safety at existing airports and to setrisk-based standards for the design of new facilities. Thispaper discusses a methodology to collect data on aircrafttrajectories and evaluate these deviation probability dis-tribution functions using data collected at CYOW.
Acceptable Risk or Target Safety Level (TLS)for Aircraft Operations
The main reason for developing a safety standard is toprovide an acceptable level of safety to aircraft operations.An acceptable level of safety is defined with respect to therisk for aircraft operations. According to the Civil AviationAuthority of Sri Lanka, safety risk is defined as ‘‘theassessment, expressed in terms of predicted probability andseverity of the consequence(s) of a hazard taking asreference to the worst foreseeable situation’’ (CAASL,2010). The worst foreseeable situation can vary withrespect to the phase of the aircraft operation. For example,aircraft can collide with an object when taxiing or
Table 1.Approach surface dimensions. Source: ICAO, 1999.
Surface and dimensions
Non-instrumentcode number
Non-precision approachcode number
Precision approachcategory
1 2 3 4 1,2 3 4Cat I Cat II, III
1,2 3,4 3,4
Length of inner edge (m) 60 80 150 150 150 300 300 150 300 300Distance from threshold (m) 30 60 60 60 60 60 60 60 60 60Divergence (each side) 10% 10% 10% 10% 15% 15% 15% 15% 15% 15%First sectionLength (m) 1600 2500 3000 3000 2500 3000 3000 3000 3000 3000Slope (m) 50 40 3.330 2.50 3.330 20 20 2.50 20 20
Second sectionLength (m) NA NA NA NA NA 3600 3600 12000 3600 3600Slope (m) NA NA NA NA NA 2.5% 2.5% 3% 2.5% 2.5%Horizontal sectionLength (m) NA NA NA NA NA 8400 8400 8400 8400 8400Total length (m) NA NA NA NA NA 15000 15000 15000 15000 15000
A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering 53

approaching a runway. The severity and frequency of thesetwo situations are not equivalent.
According to ICAO, the accepted probability of this kindof incident to occur during an aircraft operation is definedas the acceptable safety level (ASL). This kind of approachto safety management recognizes that it is unrealistic toexpect a zero risk. Some risk may have to be tolerated tosecure the benefits of an activity. Risks must therefore bebalanced with the benefits, with regard to the practicabilityof achieving further risk reduction (Eddowes et al., 2001).Assigning an ASL value to a safety standard that protects aspecific phase of an aircraft operation is a complicatedprocess since it depends on the likelihood and severity ofan incident that could occur during that phase of operation.For example, the acceptable probability of a low speedaircraft wingtip collision with an object during a taxiingoperation can be higher than for a catastrophic event suchas an aircraft hitting an obstacle when on final approach.
According to ICAO (2012), the consequence or severityof an incident is classified into four categories:Catastrophic, Hazard, Major, and Minor. The likelihoodof occurrence is categorized into Extremely Improbable,Extremely Remote, Remote, Reasonably Probable, andFrequent. The combination of those categories creates aRisk Tolerability Matrix such as the one shown in Table 2.As can be seen in Table 2, only acceptable and reviewincidents are allowed to occur at airports and ASL valuesfor those incidents should be established after a cost-benefitanalysis.
In this study, the event of an aircraft hitting an object onthe ground when approaching or departing from a runway
will be considered an extremely improbable, catastrophicevent. The main objective of the OLS is to reduce thefrequency of such an event as far as reasonably practicable.According to the risk tolerability matrix, the acceptablefrequency of such an incident can be estimated by cost-benefit analysis. According to ICAO’s obstacle clearancepanel, a 10-7 probability is used for risk of collision permovement with an obstacle due to the aircraft beinglaterally off-path or beneath the approach path (Eddoweset al., 2001). The TLS value that should be used inaeronautical studies is set by ICAO (1980; 2005b).However, this value can change from country to countryor even region to region because the results of the cost-benefit analysis depend on the investment made on safetyin those countries. The estimation of the acceptable safetylevel for obstacle limitation surfaces is beyond the scope ofthis study. Therefore, we have assumed a 10-7 collision riskper approach as the acceptable safety value to estimate thedimensions of OLS recommended by ICAO and itsobstacle clearance panel (Eddowes et al., 2001). This valuewas used in most recent aeronautical studies as a TLS value(Hall et al., 2008; Wong, Pitfield, Caves, & Appleyard,2009a). However, the proposed methodology can be usedto estimate the dimensions for any given value of ASL.
Deviations from Annex 14 standards can be acceptedafter an aeronautical study. The primary objective of anaeronautical study is to assess the adequacy of protectionprovided by the existing layout for the operation of thecritical aircraft (ICAO, 2005a). Therefore, it depends onseveral factors such as weather, geographical character-istics, aircraft operational characteristics, and the flight
Table 2.Risk tolerability matrix. Source: ICAO, 2012.
Probability of Occurrence
Severity Extremely Improbable Extremely Remote Remote Reasonably Probable Frequent
Catastrophic Review Unacceptable Unacceptable Unacceptable UnacceptableHazardous Review Review Unacceptable Unacceptable UnacceptableMajor Acceptable Review Review Review ReviewMinor Acceptable Acceptable Acceptable Acceptable Review
Inner horizontal
Transitional
Inner approach
Conical
Approach Take off
Figure 1. Obstacle limitation surfaces (OLS). Source: ICAO annex 14 (2005b).
54 A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering

phase. Decision makers must consider those factors whenthey are conducting an aeronautical study in order to makemodifications to the existing standards. In most of theprevious studies (Wong et al., 2009a:Valdes, Marıa,Comendador, Gordun, & Nieto, 2011; Wong, Pitfield,Caves, & Appleyard, 2009b), quantitative risk assessmentmethod was used to carry out the aeronautical studies basedon acceptable or target level of safety.
Quantitative risk assessment criteria were used to mea-sure the level of safety of design standards by Eddowes andcolleagues (2001) in Norwegian airports. That studyidentifies the need for changes in Annex 14 standards tomaintain an adequate level of safety in Norwegian airports.The study also indicates that aerodrome standards can varywith respect to the geographical location of an airport. In2010, a study was conducted by ICAO and the FAA toassess the risk level of existing OFZ standards whenoperating the new large aircraft (NLA) (ICAO, 2005b).OFZ is a type of OLS that provides protection for balkedlandings and missed approaches. The objective of thatstudy was to verify the possibility of operating Code Faircraft in existing aerodromes that currently operate asCode E. The study used simulation flight path data toanalyze the risk level of the OFZ. As a conclusion, it wasshown that Code E autopilot OFZ surfaces are acceptablefor autopilot operations of NLA. Furthermore, it was found
that NLA that operate using a flight director (FD) canoperate at Code E Category I runways. From thesefindings, it can be argued that the current standards forOLS were not estimated properly. Therefore, further studieswill be helpful to estimate the optimal balance betweensafety and cost-effectiveness for OLS standards.
Methodology
The assessment of risk associated with aircraft deviationfrom the standard path during airborne operations is some-what more complex than the case with ground operations,because of the three-dimensional nature of flight paths. Theanalysis needs to be carried out by considering all threedirections that affect the deviation probability (i.e., lateral,vertical, and longitudinal). To achieve this, the proposedmethodology was divided into two major components: dataprocessing and analysis. These two components are describedin detail in following sections.
Flight Trajectory Data Collection and Treatment
Flight trajectory data were collected using NAVTRACKsoftware. NAVTRACK is a web-based application devel-oped by Nav Canada—the air traffic service provider inCanada—capable of collecting and saving the flight path
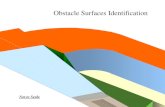
Figure 2. Observed error of flight paths.
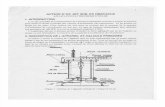
Flight path cross point
Runway cross point (C)
X direction
Y direction
Figure 3. Runway cross point and flight path cross point.
A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering 55

data that is tracked by air traffic control (ATC) secondaryradars in real time. However, the positional accuracy andmore information on the secondary radar system were notmade available to the authors. In this study, NAVTRACKwas used to collect data from August 2011 to August 2012.NAVTRACK collects the aircraft location data recordedevery five seconds, within a 20 km radius from an airport.This information can be used to display the airplanemovements on Google Earth in real time. With this data, itis possible to plot the aircraft trajectories both on take-offand final approach.
At five-second intervals, aircraft geographical position(i.e., latitude, longitude, and altitude), speed, type, ID, andorigin and destination airports are tracked and saved inKMZ format (Google Earth file). These files can be directlydownloaded from the server and used to view the historicalflight paths in Google Earth. This option helps the user toidentify the runway that was used for an aircraft operation.
The KMZ files can only be used to work with GoogleEarth applications. Therefore, KMZ files were converted toKML files in order to extract required information.MATLAB is a popular tool capable of reading the data inKML files. A MATLAB program was developed in orderto filter the relevant information such as coordinates andaircraft attributes from the KML files. Furthermore, aseparate program was developed to convert the geographi-cal coordinate system data to the Universal TransverseMercator (UTM) coordinate system. This conversion willhelp to plot the aircraft trajectories in a three-dimensionalCartesian coordinate system. The conversion equations canbe found in Synder (1987).
Truncation Error
In the data filtering process, it was observed that flightpaths are shifted to a southeast direction from the runwaywhen it was plotted on Google Earth (Figure 2). Accordingto Nav Canada, this deviation is due to the reduced numberof decimal points of tracked coordinates of aircraft.Therefore, it is a constant error in the tracked coordinatesand needs to be corrected before the analysis of aircraftdeviation. The following methodology was used to removethat truncation error from the data. It is mainly based onthe assumption that on average, aircraft should be on therunway center line when they are moving on the runway.In other words, if an airport has crossing runways, then theaircraft movements on runways should intersect at the crosspoint of the two runways. Therefore, this methodology canbe used only at airports that have crossing runways in orderto remove that truncation error from the data.
Initially, the data samples of flight paths were collected andplotted on an XY coordinate system, and coordinates of crosssection points of flight paths were calculated using Cartesiangeometry (Figure 5). According to the assumption, calculatedcross points should be at the intersection of the two runways if
there is no truncation error in the data. Therefore, the deviateddistance of X and Y directions were calculated with respect tothe point C (Figure 3). Then, the average deviation wascalculated for both X and Y directions. This process wasperformed on the large and small aircraft samples (i.e., Code1, 2, 3, and 4) in order to represent the all aircraft types, andaverage values of deviation were calculated. According to theresults, it was found that X and Y directions have 64 m and-36m average errors, respectively. Therefore, 64 m wassubtracted from every coordinate in the X direction and 36 mwas added in the Y direction to remove the truncation errorfrom the data. After this correction, all the aircraft paths wereon the runway and their deviation can be calculated withreference to the runway center line direction.
Coordinate System
To measure the deviation of a flight from its intended path,the coordinate system was defined with reference to therunway threshold. The origin was established at one of therunway thresholds of a given runway and the line connectingthe two runway thresholds taken as the Y axis. The X axis andZ axis were defined as parallel to the runway surface andperpendicular to the XY plane respectively. Figure 4 shows thediagram of the coordinate system that was used in this study.
Intended Flight Path
When aircraft is on the final approach to an airport, itneeds to follow a predefined path, which in this study isreferred to as the intended flight path. In instrument landingsystem (ILS) approaches, the intended flight path is definedby the intersection between the localizer and the glide slopeplanes (Figure 4). In non-precision and visual approaches,aircraft should follow the extended runway center linedirection, and the descent rate which is stated in approachprocedures. Therefore, in non-precision approaches andvisual approaches, it is difficult to find the vertical angle ofthe approach path because it can change with respect topoint at which it starts the final approach. Therefore, it wasdecided to measure the vertical deviation of aircraft withrespect to the runway threshold elevation and lateraldeviation with respect to the runway center line.
Categorization of Aircraft Approaches
Deviation of an aircraft from its intended path couldbe a result of one or multiple factors. For example, it can bedue to lack of pilot experience, bad weather conditionssuch as high cross winds and poor visibility, calibrationerrors of the navigation instruments that are used forinstrument approaches in airports and aircraft, and soforth. As a result, it is impossible to identify the exactreason for the deviation of an aircraft when the only dataavailable is the actual trajectories for the analysis.
56 A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering

According to ICAO (1999), the effect of some of thosefactors on OLS dimensions is represented by categorizingthe runways with respect to the approach type and codenumber (Table 1).
In this analysis, approach trajectory data of ICAO Code3 aircraft on CYOW runway 07-25 were analyzed.According to the Canada air pilot (CAP) 4 document(Nav Canada, 2012), runway 07-25 has been used for bothnon-precision and precision approach procedures (Table 3)(Nav Canada, 2012). In precision approaches (PA), thepilot get both vertical and lateral guidance, but in non-precision approaches (NPA), they only get lateral guidance.Therefore, if we are going to estimate OLS dimensionswith respect to the type of approach (i.e., precision, non-precision, visual), deviation data needs to be dividedaccording to that. In order to do that categorization, adatabase that contains aircraft approach information forCYOW is required. However, during our study, we wereunable to acquire such database for CYOW.
Therefore, it was decided to combine the non-precisionand precision approach data and analyze the aircraftapproaches with respect to the meteorological condition(i.e., instrument and visual) at the airport. Due to thatcategorization, the study is unable to show the effect ofguidance system to deviations from the intended path. How-ever, OLS is a permanent surface for a runway. Therefore, ifa runway has been used for both types of approaches, thenthat runway’s OLS should provide protection for both typesof approaches. As a result, it can be argued that thedimensions of OLS that we get from this analysis bycombining the NPA and PA will provide the adequate levelof safety for both types of instrument approaches.
To distinguish the approaches under visual meteorolo-gical conditions (VMC) and instrument meteorologicalconditions (IMC), METAR data containing weather
information for CYOW was obtained from the OntarioCentre for Climate Impacts and Adaptation Resources.According to Horonjeff and colleagues (2010), aircraftshould use instrument procedures in IMC. However, inVMC, aircraft are allowed to use instrument approachprocedures. Therefore, when we categorize the dataaccording to the meteorological condition, instrumentapproach data may be included in the VMC data.
Calculation of the Deviations From Intended Path
Aircraft deviation from its protected path was calculatedat 500 m intervals along the runway center line (Figure 4).In this calculation, it is assumed that magnitude ofdeviation does not change significantly within a given500 m interval along the intended flight path. In this study,Cartesian geometry calculations were used to estimate thedeviation distances along the extended runway center linedirection. As a first step, the Cartesian equation of therunway center line was calculated using the coordinates ofthe runway thresholds.
y~m1xzC1 ðEq:1Þ
Wherem1~
Y1{Y2
X1{X2;
C1~Y1{Y1{Y2ð Þ:X1
(X1{X2)
The equations for the cross section lines that are per-pendicular to the runway center line and at 500-m intervals are
y~m2xzC2 ðEq:2Þ
Figure 4. Runway coordinate system and intended path.
A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering 57

Where
C2~Y1{m2X1; m2~(1=m1)|({1)
and
y~m3xzCL ðEq:3Þ
where
m3~m2; CL~C1zL
cos h ; h~tan{1(m2)
Then, the equation between two tracking points ofaircraft was computed as
y~mpxzCp ðEq:4Þ
where
mp~y1{y2
x1{x2; Cp~y1{
y1{y2ð Þ:x1
(x1{x2)
In this step, we assumed that the flight path between twotracking points can be represented using a straight line.Finally, the intersection point of cross section line andflight path line was calculated.
y~CLmp{Cpm2
mp{m2ðEq:5Þ
x~CL{Cp
mp{m2ðEq:6Þ
Vertical deviation~z~z1
{(z1{z2)(x1{x2)2z(y1{y2)2f g0:5
(x1{x)2z(y1{y)2f g0:5 ðEq:7Þ
Lateral deviation (D)~ (Xc{x)2z(Yc{y)2� �0:5 ðEq:8Þ
(xi, yi, zi) 5 Tracking point coordinates of the aircraft(i 5 1,2)(Xi, Yi) 5 Runway threshold coordinates (i 5 1,2)(Xc, Yc) 5 Runway center line and cross section lineintersecting point coordinate (c 51-16).D 5 deviation distancemi 5 gradient of line; Ci 5 intercept of lineThese were used to measure the distance between the
aircraft’s center of gravity and the runway center lineextension. The diagram of a flight path and the deviations isshown in Figure 5. Both horizontal and vertical deviationsfrom the intended path were measured at each cross sectionplane. Afterward, aircraft characteristics and weathercondition were assigned to those points to filter the dataaccording to required categories.T
able
3.C
YO
Wru
nway
07-2
5ap
proa
chty
pes.
Inst
rum
ent
appr
oach
type
TD
ZE
(ft)
FA
F(k
m)
Min
imum
alti
tude
atF
AF
(ft)
Vis
ibili
ty(S
M)
Min
imum
desc
ent
alti
tude
Min
imum
desc
ent
heig
htG
lide
path
angl
eIL
SC
AT
App
roac
hty
pe
ILS
373
7.2
1500
0.5
573
200
3I
prec
isio
nL
OC
373
7.2
1500
176
038
7-
non-
prec
isio
nN
DB
373
7.2
1500
180
042
7-
non-
prec
isio
n
TD
ZE
5T
ouch
dow
nzo
neel
evat
ion;
FA
F5
Fin
alap
proa
chfi
x;S
M5
Sta
tute
mile
s;IL
SC
AT
5In
stru
men
tap
proa
chca
tego
ry.
58 A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering

Estimation of Distribution Function Parameters
The deviation probabilities for approaches in a cross sectioncan be calculated by fitting the deviation data to univariate orbivariate continuous probability density functions (PDF). Asdescribed above, maximum deviation data were used for theanalysis. The type and parameters of the deviation distribu-tions need to be estimated for each 500 m cross section
separately. Moreover, it is important to check the dependencyof the lateral and vertical deviation data before estimating thedistribution functions. If the data are dependent, it is necessaryto estimate the joint probability functions, whereas if they areindependent, two separate distribution functions can be usedfor the vertical and lateral deviations.
According to the above methodology, independent datawere fitted to the normal mixture distribution and
Figure 5. Notations for flight path deviation calculations.
A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering 59

dependent data were fitted to joint normal distribution(Equations 12 and 13). The main objective of using thenormal mixture distribution is obtaining a good fit not onlyfor the tail of the distribution, but also for the central part ofthe distribution. However, it can be argued that the resultswhich are produced using the normal distribution is notprecise when estimating the extreme probability valuessuch as 10-7. Therefore, in the future research, results needsto be compared with results obtained from using theextreme value distribution.
f xð Þ~W1 � f x,m1,s1ð ÞzW2 � f x,m2,s2ð ÞzW3 � f x,m3,s3ð Þ ðEq:12Þ
where
f x,mi,sið Þ~ 1sffiffiffiffi2pp exp {
x{mið Þ22s2
i
� �
fX ,Y x,yð Þ~ 1
2ps1s2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1{r2ð Þ
p
exp { 12 1{r2ð Þ
x{m1
s1
� �2
{2r x{m1
s1
� �y{m2
s2
� �z
y{m2
s2
� �2� �
ðEq:13Þ
s1w0,s2w0{1ƒrƒ1
Wi 5 weightsmi 5 mean of the variablesi 5 variance of the variabler5 correlation parameterxi, yi 5 aircraft deviation (lateral or vertical)
The parameters of the distributions were estimatedseparately for deviation data at every 500 m cross sectionusing the "nor1mix" package, which was built underR project. The package has functions to estimate parametersof the bivariate and univariate distribution parameters of nor-mal distribution using the expectation maximization (EM)algorithm. The EM algorithm is an iterative method forfinding maximum likelihood estimates of parametersin statistical models, where the model depends on un-observed latent variables (Maechler, 2013). Furthermore theKolmogorov-Smirnov (K-S) test was used to measure thegoodness of fit (GOF) of the distribution models. The K-Stest does not produce good estimates for large sample sizesdue to its poor assessment of fit at the tail (Eiger, Nadler, &Spiegelman, 2013). However, it is important to note herethat not only do the extreme probabilities affect thecalculation of location probabilities, but also the middle
Figure 6. Iso probability curves around the intended path.
60 A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering

part of the distribution. Therefore, measuring the fit inthe central part of the distribution curves is also essential. Forthis reason, the normal mixture distribution was used toestimate the overall goodness of fit for the entire data range,and the K-S test was used to assess the fit. However, infuture studies, it is recommended that an extreme valuedistribution be used to more accurately estimate the densityfunction’s tail.
Estimation of the Required Dimensions of theApproach Surface
As described in Section 1, the main objective of the OLSis to protect airborne aircraft from obstacles on the groundin the vicinity of an airport and reduce the likelihood ofcollisions with such obstacles. Therefore, the dimensions ofthe OLS depend on the probability of an aircraft deviatingfrom the approach path. The OLS is defined by the surfacebeyond which the probability of collision with an obstacleon the ground is below the acceptable safety level.
The estimated distribution functions can be used to findthe inverse of the cumulative probabilities or quantile valuesof the probabilities that aircraft deviate beyond a givendistance. In this study, those probability values are definedas the location probabilities of an aircraft. Equations 14 and15 can be used to estimate the quantile values of the locationprobabilities in a given cross section. The quantile values canbe estimated for 10-1 to 10-7 location probability values foreach cross section. In the next step, points that have theacceptable level of safety (i.e., 10-7) were identified andconnected to develop iso-probability curves. This was donefor each cross section, and iso-probability points wereconnected to develop the three-dimensional approach surface(Figure 6).
Dependent data
qx,z~F{1 1{Fx,z x,zð Þð Þ ðEq:14Þ
Independent data
qx,z~ F{1 pxð Þ� �
, F{1 pzð Þ� �
ðEq:15Þ
Where,
1{Fx,z x,zð Þ~px|pz~P
P 5 acceptable level of safety or given locationprobability value
F(x,z) 5 cumulative probability function
Results
In this study, two samples of 943 and 882 IMC andVMC Code 3 aircraft trajectories were analyzed, respec-tively. The categorized approach data were used to measurethe aircraft deviation from its intended path and esti-mate deviation distribution functions. Before fitting this
deviation data to distribution functions, a Pearson correla-tion test was carried out to check the independency oflateral and vertical deviation data in every cross section.The null hypothesis of the test is that the correlationcoefficient is equal to zero, and the alternative hypothesis isthat the correlation coefficient is not equal to zero.Therefore, if the p value of the test is greater than 0.05,the null hypothesis cannot be rejected.
The results of the Pearson correlation test are shown inTable 4a-b for code 3 aircraft, which are operated underVMC and IMC. According to the analysis, no significantcorrelation between lateral and vertical deviation data wasfound. All the p values of the tests were greater than 0.05.We cannot reject the null hypothesis at 95 confidence level.Therefore, two separate distribution functions were used forvertical and lateral deviations to calculate the deviationprobability on a cross section.
Table 4a.Pearson correlation test on data for Code 3 aircraft under IMC.
Section P-value Correlation coefficient
500 0.3035 0.0287100 0.8020 0.00701500 0.4452 -0.02132000 0.6139 0.01412500 0.5618 -0.01623000 0.7707 0.00813500 0.7782 0.00784000 0.5102 -0.01844500 0.5205 -0.01795000 0.3079 -0.02855500 0.6599 -0.01236000 0.1861 -0.03696500 0.1028 -0.04567000 0.7117 -0.01037500 0.9367 -0.00228000 0.4317 -0.0219
Table 4b.Pearson correlation test on data for Code 3 under VMC.
Section P-value Correlation coefficient
500 0.1275 0.0652100 0.8631 -0.00261500 0.0434 0.03092000 0.2306 -0.01832500 0.6747 0.00643000 0.2257 -0.01853500 0.1705 -0.02764000 0.0956 -0.02554500 0.7687 0.00455000 0.9432 -0.00105500 0.6005 0.00806000 0.1761 0.02076500 0.8800 -0.00237000 0.6200 -0.00757500 0.7262 0.00538000 0.9943 0.0001
A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering 61

Table 5a.Lateral deviation distribution parameters for Code 3 aircraft under IMC.
Section K-S dist P-value m1 m2 m3 s1 s2 s3 W1 W2 W3
500 0.0129 0.9820 -4 -0.50 -0.22 269 1.5 63 0.34 0.15 0.50100 0.0116 0.9949 -29 -2 27 329 214 467 0.31 0.29 0.381500 0.0101 0.9994 -26 2 31 353 286 452 0.33 0.28 0.372000 0.0161 0.8939 -19 6 32 434 342 538 0.35 0.29 0.352500 0.0146 0.9458 -19 9 41 495 302 518 0.36 0.32 0.303000 0.0096 0.9997 -21 8 38 527 293 573 0.34 0.29 0.353500 0.0089 0.9999 -20 20 43 507 355 868 0.35 0.30 0.344000 0.0097 0.9997 -14 15 48 725 606 708 0.34 0.28 0.364500 0.0172 0.8422 -17 19 51 673 519 643 0.35 0.31 0.335000 0.0110 0.9977 -18 18 49 840 487 892 0.35 0.26 0.375500 0.0116 0.9949 -19 22 65 795 523 6256 0.39 0.32 0.276000 0.0113 0.9964 -23 22 63 891 515 878 0.34 0.31 0.336500 0.0102 0.9992 -28 23 633 948 480 1256 0.38 0.24 0.377000 0.0141 0.9605 -23 15 61 1446 905 1395 0.35 0.26 0.377500 0.0094 0.9998 -31 22 68 1170 770 1468 0.34 0.28 0.368000 0.0122 0.9908 -34 27 69 1315 1150 1888 0.34 0.30 0.35
Table 5b.Vertical deviation distribution parameters Code 3 aircraft under IMC.
Section K-S dist P-value m1 m2 m3 s1 s2 s3 W1 W2 W3
500 0.0109 0.9980 152 152 172 81 26 113 0.27 0.32 0.40100 0.0129 0.9825 183 184 208 157 46 53 0.29 0.53 0.161500 0.0170 0.8529 204 213 235 161 50 87 0.21 0.62 0.152000 0.0180 0.8003 222 243 265 75 49 80 0.20 0.69 0.102500 0.0158 0.9060 252 274 274 74 36 246 0.27 0.42 0.303000 0.0096 0.9997 279 304 301 54 44 267 0.30 0.43 0.253500 0.0160 0.8949 307 333 329 49 45 215 0.36 0.34 0.294000 0.0146 0.9468 338 351 364 54 350 49 0.45 0.18 0.364500 0.0147 0.9433 361 367 389 136 33 117 0.21 0.28 0.505000 0.0119 0.9928 391 397 421 192 37 100 0.27 0.33 0.395500 0.0176 0.8187 400 425 445 52 66 151 0.08 0.45 0.456000 0.0107 0.9984 433 458 483 55 77 66 0.15 0.62 0.226500 0.0135 0.9731 463 486 498 76 51 142 0.23 0.36 0.397000 0.0120 0.9923 493 512 533 99 88 132 0.33 0.30 0.357500 0.0131 0.9803 528 548 556 232 47 197 0.46 0.25 0.288000 0.0200 0.6818 556 578 588 197 43 127 0.55 0.17 0.27
Table 5c.Lateral deviation distribution parameters Code 3 aircraft under VMC.
Section K-S dist P-value m1 m2 m3 s1 s2 s3 W1 W2 W3
500 0.0086 0.9071 -0.25 -0.35 -3.0 44 1.8 298 0.44 0.12 0.42100 0.0088 0.8948 -26 1.0 32 351 303 380 0.36 0.28 0.341500 0.0080 0.9464 -21 11 34 371 418 575 0.35 0.28 0.352000 0.0072 0.9795 -21 12 38 352 271 521 0.35 0.29 0.342500 0.0068 0.9872 -17 14 40 445 379 619 0.34 0.29 0.353000 0.0053 0.9996 -18 13 44 464 331 593 0.34 0.28 0.363500 0.0079 0.9504 -16 16 49 483 336 592 0.34 0.28 0.374000 0.0056 0.9992 -15 23 51 647 448 808 0.35 0.29 0.344500 0.0078 0.9543 -16 19 57 684 406 716 0.35 0.28 0.365000 0.0067 0.9902 -21 19 55 721 442 866 0.34 0.27 0.375500 0.0087 0.9024 -23 21 61 808 516 877 0.34 0.30 0.346000 0.0067 0.9906 -23 23 65 905 578 1037 0.34 0.30 0.356500 0.0075 0.9693 -27 21 65 880 623 1168 0.32 0.30 0.377000 0.0074 0.9709 -28 23 69 1072 873 1474 0.33 0.30 0.357500 0.0078 0.9527 -32 28 65 1032 1113 1801 0.33 0.29 0.378000 0.0086 0.9082 -34 23 64 1390 1187 2241 0.30 0.26 0.42
62 A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering

Table 5d.Vertical deviation distribution parameters Code aircraft under VMC.
Section K-S dist P-value m1 m2 m3 s1 s2 s3 W1 W2 W3
500 0.0110 0.6690 152 153 170 158 32 149 0.24 0.3 0.38100 0.0109 0.6890 180 183 194 193 34 186 0.28 0.37 0.341500 0.0125 0.5158 192 213 223 74 39 220 0.14 0.57 0.272000 0.0124 0.5212 221 243 248 71 39 268 0.24 0.49 0.262500 0.0121 0.5554 248 272 276 50 51 313 0.30 0.48 0.203000 0.0127 0.4951 277 302 298 49 54 436 0.36 0.42 0.203500 0.0095 0.8339 307 322 332 58 493 56 0.43 0.25 0.314000 0.0238 0.0153 314 335 355 76 35 261 0.06 0.32 0.604500 0.0180 0.1243 344 365 383 59 42 294 0.10 0.31 0.575000 0.0185 0.1042 372 395 411 53 38 376 0.12 0.32 0.555500 0.0154 0.2632 400 425 437 50 48 441 0.13 0.30 0.566000 0.0116 0.6112 432 456 465 64 40 502 0.20 0.25 0.536500 0.0090 0.8759 461 487 493 63 67 689 0.28 0.31 0.407000 0.0133 0.4352 488 502 521 26 355 763 0.14 0.42 0.427500 0.0167 0.1827 513 543 564 210 421 1758 0.27 0.65 0.068000 0.0165 0.1939 547 582 588 218 346 2281 0.51 0.41 0.07
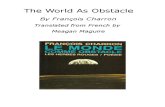
Figure 7a. 3-D view of the 10-7 estimated OLS surface for Code 3 IMC aircraft approaches with existing ICAO OLS surface. Figure 7b. Plan view of the 10-7
estimated OLS surface for Code 3 IMC aircraft approaches with existing ICAO OLS surface. Figure 7c. Profile view view of the 10-7 estimated OLS surfacefor Code 3 IMC aircraft approaches with existing ICAO OLS surface.
A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering 63

The estimated parameters of the mixture of normaldistribution and K-S goodness of fit results are shown inTable 5a-d for each meteorological condition. The esti-mated goodness of the fit test’s p values indicates that allthe models have a significant goodness of fit.
Iso-probability surfaces for IMC approaches for a 10-7
location probability are shown with the existing ILS andPANS-OPS surfaces in Figures 7 and 8, respectively.In this study, we assumed that IMC approaches representinstrument approaches. Therefore, the estimated surfacewas also compared with the PANS-OPS surface, which isspecifically designed to protect instrument approaches. Toestimate the dimensions of the PANS-OPS surface, it wasassumed that the glide path angle is 3 , the distancebetween the localizer and the runway threshold is 3,000 m,and the missed approach gradient is 2.5%. The dimensionsof the assumed surface were obtained from the examples
presented in the PANS-OPS standards document. Figure 9compares the estimated surface for VMC approaches withthe non-instrument surface. The plain color surfaces showthe existing dimensions of the OLS/PANS-OPS, and thesurfaces illustrated with multiple colors represent thisstudy’s estimated surface dimensions. The different colorsof the estimated surfaces were used to show changes in thevertical dimensions and to provide a visual comparison.The estimated lateral and vertical maximum values of thesurface for each cross section along the approach path areshown in Table 6a-b.
The results of the analysis show that the estimated lateraldimensions of the approach surfaces were smaller than boththe Annex 14 standards and PANS-OPS standards.However, the required lateral dimensions were compara-tively higher for the IMC approaches than for the VMCapproaches. Moreover, the estimated surfaces indicate that
Figure 8a. 3-D view of the 10-7 estimated OLS surface for Code 3 IMC aircraft approaches with existing ICAO PANS-OPS surface. Figure 8b. Plan view ofthe 10-7 estimated OLS surface for Code 3 IMC aircraft approaches with existing ICAO OLS surface. Figure 8c. Profile view of the 10-7 estimated OLSsurface for Code 3 IMC aircraft approaches with existing ICAO OLS surface.
64 A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering

vertical dimensions of some of the approach surfacesrequire greater clearance than the existing surfaces in IMCoperations.
It can be concluded that there has been improvement inairport navigational facilities compared with the past,which has affected the magnitude of aircraft deviationfrom its intended path. However, these results cannot beused to assess the effect of navigational facilities betweeninstrument and non-instrument approaches due to theabsence of approach type information. Therefore, toconduct a more detailed analysis, it is important to knowthe type of approach for each flight trajectory.
Furthermore the developed surface’s dimensions arepresented without considering the effect of aircraftgeometry to its dimensions. Therefore, the wingspan lengthand aircraft height must be taken into account whencalculating the critical OLS dimensions for an airport. As aresult, aircraft types that are operated at an airport alsosignificantly affect the OLS dimensions.
Conclusion
This paper summarizes the methodology that was used tocalculate the probability of aircraft deviations from theirintended path. Deviation probability functions were devel-oped using the collected aircraft approach trajectories atCYOW. The data were extracted from the NAVTRACKsoftware developed by Nav Canada. This study proposes anovel approach to assess the risk of OLS using actual flightpath data. Most of the previous studies related to theobstacle restriction standards were developed using simu-lated flight paths. Those studies are not capable to representall the factors in aircraft deviation. It is obvious that wecannot also identify all of those influence factors. However,those factors are embedded in the actual deviationsmeasured. The same methodology can be used to developthe probability models for missed approaches and take offoperations to estimate the dimensions of the take off andtransitional surfaces.
Figure 9a. 3D view of the 10-7 iso-probability curve for Code 3 aircraft approaches under VMC. Figure 9b. Plan view of the 10-7 iso-probability curve forCode 3 aircraft approaches under VMC. Figure 9c. Profile view of the 10-7 iso-probability curve for Code 3 aircraft approaches under VMC.
A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering 65

Tab
le6a
.C
ompa
riso
nof
estim
ated
Cod
e3
IMC
appr
oach
surf
ace
dim
ensi
ons
with
ICA
OIL
San
dP
AN
S-O
PS
surf
ace.
Sect
ion
(m)
Col
lisio
npr
obab
ility
per
appr
oach
Est
imat
edla
tera
ldi
men
sion
(m)
Est
imat
edve
rtic
aldi
men
sion
(m)
ICA
OIL
Ssu
rfac
eIC
AO
PA
NS-
OP
Ssu
rfac
e
Lat
eral
dim
ensi
on(m
)V
erti
cal
dim
ensi
on(m
)L
ater
aldi
men
sion
(m)
Ver
tica
ldi
men
sion
(m)
500
1E-0
777
.86
021
68.
813
022
1000
1E-0
784
.00
11.9
129
118
.821
336
.515
001E
-07
101.
8126
.12
366
28.8
296
5120
001E
-07
126.
3135
.56
441
38.8
379
65.5
2500
1E-0
714
0.27
38.3
651
648
.846
280
3000
1E-0
715
8.99
56.9
859
158
.854
594
.535
001E
-07
189.
6852
.16
666
68.8
628
109
4000
1E-0
720
8.97
68.1
274
178
.871
112
3.5
4500
1E-0
723
5.86
90.1
281
688
.879
413
850
001E
-07
260.
8510
0.56
891
98.8
877
152.
555
001E
-07
285.
8411
1.21
966
108.
896
016
760
001E
-07
310.
8312
1.44
1041
118.
810
4318
1.5
6500
1E-0
733
5.82
131.
8811
1612
8.8
1126
196
7000
1E-0
734
0.12
142.
3211
9113
8.8
1209
210.
5
66 A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering

The results of this study indicate that there is a con-siderable difference between dimensions of the existingICAO ILS and PANS-OPS approach surface, and estimatedsurfaces that were obtained using the observed flight paths.This shows that the dimensions of existing surfaces may beoverestimated as they provide higher levels of safety foraircraft operations than prescribed by ICAO. This is adesirable result at airport sites where the OLS impose nosignificant restrictions either to aircraft operations or to theland use in the airport’s vicinity. However, if there is arestriction to aircraft operations at an airport due to obstaclesthat penetrate the OLS or PANS-OPS surface prescribed bythe standards, this methodology can be used to check thelevel of safety of those operations or the risk of collisionswith said obstacles. Furthermore, the goodness of fit testresults indicate that models can produce statistically sig-nificant results, which is a good encouragement for futureworks stemming from this study. The proposed methodol-ogy will be a great help for airport expansion projectsbecause airport owners will able to manage their availablespace efficiently by assessing the level of safety of aircraftoperations. Using the proposed methodology, the risk ofcollision with objects around the airports can be calculated.This will also be helpful for real estate developers to identifythe limitations of their constructions, such as the height ofthe buildings. Moreover, this methodology can be used inthe future to develop a computer model to estimate the risklevel imposed by obstacles around the airports for bothvisual and instrument aircraft approaches.
The results of the study are based on the data collectedfrom CYOW runway 07-25. For other runways andother airports, separate analyses need to be performed fordifferent approach types to the same runway to estimate the
critical surface that should be used as the OLS. Moreover,other runways in CYOW and other airports need to bemodeled to observe the effect of approach types andgeographical condition on aircraft deviation from intendedpaths. The effect of positional error of radar tracking pointsin the analysis results is also acknowledged. Positionalerrors of tracked coordinates can impact the calculations ofaircraft deviation from its intended path. According toEquations 7 and 8, the magnitude of error in deviationvalues (i.e., D and z) is decided by the positional accuracyof the xi, yi, and zi coordinates. Therefore, it can be arguedthat the parameters of the deviation distributions also aredependent upon the positional accuracy of the trackedcoordinates. Nevertheless, if it were possible to collectmore accurate aircraft trajectories, then the effect ofpositional error to the analysis would be insignificant. Asa result, a methodology to model the positional error wouldnot be required.
Acknowledgments
The authors wish to thank Nav Canada for providing thedata on Ottawa International Airport and access to theNAVTRACK software. This research was partially fundedby a grant from the Natural Sciences and EngineeringResearch Council of Canada.
References
CAA. (2011). Licensing of aerodromes (9th ed.). Norwich: UK CivilAviation Authority.
CAASL. (2010). Safety risk assessment manual (1st ed.). Sri Lanka: CivilAviation Authority of Sri Lanka, Colombo.
Table 6b.Comparison of estimated Code 3 VMC approach surface dimensions with ICAO non-instrument surface.
Section (m) Collisionprobability per
approach
Estimated lateraldimension (m)
Estimated verticaldimension (m)
ICAO ILS surface
Lateral dimension (m) Vertical dimension (m)
500 1E-07 97.81 12.15 119 14.6521000 1E-07 99.49 50.57 169 31.3021500 1E-07 90.33 150.36 219 47.9522000 1E-07 95.23 160.23 269 64.6022500 1E-07 126.18 180.63 319 81.2523000 1E-07 135.50 185.26 369 97.9023500 1E-07 134.90 226.23 419 114.5524000 1E-07 142.98 270.56 469 131.2024500 1E-07 152.78 280.12 519 147.8525000 1E-07 162.08 312.86 569 164.5025500 1E-07 155.03 324.23 619 181.1526000 1E-07 160.35 338.89 669 197.8026500 1E-07 180.17 353.55 719 214.4527000 1E-07 199.98 368.21 769 231.1027500 1E-07 219.80 356.19 819 247.7528000 1E-07 239.61 350.14 869 264.402
A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering 67

Cramer, M., & Rodriguez, L. (2013). Analysis of aircraft lateral pathdeviation, integrated communications, navigation and surveillanceconference (ICNS). Herndon, VA: IEEE.
Eddowes, M., Hancox, J., & MacInnes, A. (2001). Final report on the riskanalysis in support of aerodrome design rules: Report for the NorwegianCivil Aviation Authority. Warrington, UK: AEA Technologies.
Eiger, A. M., Nadler, B., & Spiegelman, C. (2013). The calibratedKolmogorov-Smirnov test. Ithaca, NY: Cornell Univerity.
FAA. (2004). Airport design: Advisory circular 150/5300-13, includingchanges. Washington, DC: Federal Aviation Administration.
Fricke, H., & Thiel, C. (2013). A methodology to assess the safety ofaircraft operations when aerodrome obstacle standards cannot be met.Tenth USA/Europe Air Traffic Management Research andDevelopment Seminar, Chicago, Illinois.
Hall, J., Ayres, M., Wong, D., Appleyard, A., Eddows, M., Shirazi, H.,. . .Puzin, T. (2008). ACRP report 3: Analysis of aircraft overruns andundershoots for runway safety areas. Washington, DC: TransportResearch Board.
Horonjeff, R., McKelvey, F. X., Sproule, W. J., & Young, S. B. (2010).Planning and Design of Airports. New York: McGraw-Hill.
ICAO. (1980). Doc 9274 manual on the use of the Collision Risk Model(CRM) for ILS operations (1st ed.). Montreal: International CivilAviation Organization.
ICAO. (1983). Airport services manual Part VI: Control of obstacles(2nd ed.). Montreal: International Civil Aviation Organization.
ICAO. (1999). Aerodromes: International standards and recommendedpractices: Annex 14 to the Convention on International Civil Aviation(3rd ed.). Montreal: International Civil Aviation Organization.
ICAO. (2005a). Airport services manual Part II: Taxiway apron andholding bays (4th ed.). Montreal: International Civil AviationOrganization.
ICAO. (2005b). New larger airplanes: Infringement of the obstacle freezone: Operational measures and aeronautical study. Montreal:International Civil Aviation Organization.
ICAO. (2006). Procedures for Air Navigation Services (5th ed.).International Civil Aviation Organization, Montreal.
ICAO. (2012). Safety management manual (SMM). Montreal: InternationalCivil Aviation Organization.
Litesheim, S., & Xiao, X. (2006). Airport obstacle surfaces. Journal ofAdvanced Transportation, 43, 347–366.
Maechler, M. (2013). Normal (1-D) mixture models (S3 classes andmethods) (1.1.4 ed.). R package. [MORE INFORMATION NEEDED.WHAT KIND OF REFERENCE IS THIS?]
Marco, A. D., & Auria, J. D. (2014). Collision risk studies with 6dof flightsimulations when aerodrome obstacle standards cannot be met. 29thCongress of the International Council of the Aeronotical Science,St. Petersburg, Russia.
MITRE. (2015). About MITRE. Retrieved from http://www.mitre.org/Nav Canada. (2012). Canada air pilot (CAP 4) instrumental procedures
Nav Canada. [MORE INFORMATION NEEDED.]Snyder, J. P. (1987). Map projections: A working manual. Washington,
DC: U.S. Geological Survey.Thiel, C., & Fricke, H. (2010). Collision Risk on Final Approach—
A radar-data based evaluation method to assess safety. 4th Inter-national Conference on Research in Air Transportation (ICRAT),Budapest.
Thiel, C., Seiß, C., Vogel, M., & Fricke, H. (2012). Safety Monitoring ofnew implemented approach procedures by means of radar dataanalysis. 5th International Conference on Research in AirTransportation (ICRAT), Berkeley.
Transport Canada, 1993. Aerodrome standards and recomended practices.In, A.N.S. (Ed.), Requirements (4th ed.). Ottawa, Ontario: TransportCanada.
Valdes, A., Marıa, R., Comendador, G., Gordun, M., & Nieto, S. (2011).The development of probabilistic models to estimate accident risk(due to runway overrun and landing undershoot) applicable to thedesign and construction of runway safety areas. Safety Science, 49,633–650.
Wong, D.K. Y., Pitfield, D. E., Caves, R. E., & Appleyard, A. J. (2009a).The development of a more risk-sensitive and flexible airport safetyarea strategy: Part I. The development of an improved accidentfrequency model. Safety Science, 47, 903–912.
Wong, D. K. Y., Pitfield, D. E., Caves, R. E., & Appleyard, A. J. (2009b).The development of a more risk-sensitive and flexible airport safetyarea strategy: Part II. Accident location analysis and airport riskassessment case studies. Safety Science, 47, 913–924.
68 A. Silva & A. G. de Barros / Journal of Aviation Technology and Engineering