PY 105 Section: Name: BU ID: . Partner: Name: BU ID: . Lab ... · position of the cart. You need to...
9
PY105 Lab VIII 1 PY 105 Section: Name: BU ID: . Partner: Name: BU ID: . Lab 8: Oscillations Part I In this part you will be investigating kinematic and dynamic properties of a simple harmonic motion (SHM). A picture on the right shows different views of the apparatus. There is a cart with a force sensor mounted on it. One spring is attached to the force sensor. Another spring is attached to another end of the cart, where also a large sail is attached, so the motion sensor can measure instantaneous position of the cart. You need to use file PY105_lab8.cmbl. 1. With the cart resting between two springs in equilibrium position zero all the sensors (click Zero button, check both sensors, click OK) After zeroing the sensors, click Collect, let the software collect data for 2 – 3 seconds and give a cart a light hit; if your graphs start from almost zero, and the position graph is relatively smooth, you are ready for the experiment, otherwise, try to zero each sensor independently, if that does not help, call a TF. Collect the data for the resting cart; all the graphs should show zero values for all the variables. If you observe too much fluctuations try to adjust the motion sensor so it would be aiming directly at the sail (check if the beam is horizontal, maybe put the sensor on a bar). Now your setup is equivalent to a simple situation shown below. An object with mass, m, is attached to a spring with an effective spring constant, k, the origin is set at the location of the object when the spring is at its natural length. If you shift the cart, it is not in equilibrium anymore (the force acting on it is not zero). When you release the cart it starts making oscillations. Since there is some friction in the system, the cart eventually stops. In this lab we neglect the influence of friction (so, do not worry when you see that the amplitude of the oscillations decreases and use the first period of the motion for your data). Move the cart about 8 – 10 cm away from its equilibrium position, hit to start collecting the data (wait for about a second) and release the cart (the software stops automatically in 5 seconds). On the screen you will see four graphs showing the X-component of the net force acting on the cart, as well as the position, velocity, and acceleration of the cart as a functions of time.
Transcript of PY 105 Section: Name: BU ID: . Partner: Name: BU ID: . Lab ... · position of the cart. You need to...

PY105LabVIII
1
PY 105
Section: Name: BU ID: .
Partner: Name: BU ID: .
Lab 8: Oscillations
Part I
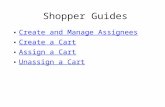
In this part you will be investigating kinematic and dynamic properties of a simple harmonic motion (SHM). A picture on the right shows different views of the apparatus. There is a cart with a force sensor mounted on it. One spring is attached to the force sensor. Another spring is attached to another end of the cart, where also a large sail is attached, so the motion sensor can measure instantaneous position of the cart. You need to use file PY105_lab8.cmbl.
1. With the cart resting between two springs in equilibrium position zero all the sensors (click Zero button, check both sensors, click OK) After zeroing the sensors, click Collect, let the software collect data for 2 – 3 seconds and give a cart a light hit; if your graphs start from almost zero, and the position graph is relatively smooth, you are ready for the experiment, otherwise, try to zero each sensor independently, if that does not help, call a TF. Collect the data for the resting cart; all the graphs should show zero values for all the variables. If you observe too much fluctuations try to adjust the motion sensor so it would be aiming directly at the sail (check if the beam is horizontal, maybe put the sensor on a bar).
Now your setup is equivalent to a simple situation shown below. An object with mass, m, is attached to a spring with an effective spring constant, k, the origin is set at the location of the object when the spring is at its natural length.
If you shift the cart, it is not in equilibrium anymore (the force acting on it is not zero). When you release the cart it starts making oscillations. Since there is some friction in the system, the cart eventually stops. In this lab we neglect the influence of friction (so, do not worry when you see that the amplitude of the oscillations decreases and use the first period of the motion for your data).
Move the cart about 8 – 10 cm away from its equilibrium position, hit to start collecting the data (wait for about a second) and release
the cart (the software stops automatically in 5 seconds).
On the screen you will see four graphs showing the X-component of the net force acting on the cart, as well as the position, velocity, and acceleration of the cart as a functions of time.

PY105LabVIII
2
If you click on a graph of your interest and then hit button you see the readings in a little box (it might be more convenient than reading the table). Use the graphs to answer questions below.
1. What is the amplitude of the oscillations? (Click on graph x(t), then click button, then move the cursor back into x(t) window)
A = _____________
2. What is the value for the maximum velocity (use the graph for velocity)?
Vmax = ___________
3. What is the period of the motion (indicate which graph did you use)?
Graph _______________________ T = _______________
4. On the graph for position as a function of time x(t) select the region slightly larger than one full period and make sin fit (when using Curve Fit scroll down the list of the functions, check Asin(Bt + C) + D and hit Try Fit button, then OK, if fitting stops working, save the file, close the program and reopen the file).
Which of coefficients A, B, C, or D gives you the value for angular frequency w? Write the value of w
w = ___________
5. Now calculate the value for angular frequency using your previous values for A and Vmax from questions 1 and 2: w = ___________ Now calculate the value for angular frequency using your value for T from question 3. w = ___________
Compare all 3 values (to compare two numbers you can calculate the relative difference | n1 − n2 |n1
*100% ).
_______________________________________ Comment on any differences. 6. Measure and compare the periods provided by the graphs x(t), v(t) and a(t). Comment on any differences. 7. Which two graphs should you use to directly estimate the effective mass of the system (“directly” means that you can extract from your graphs only 2 numbers and use them to find the effective mass)? Make the estimation (show your work – write the equation you want to use). m = _______________

PY105LabVIII
3
8. What can you say about the velocity of the cart when the cart reaches its maximum displacement from the equilibrium position? [ ] velocity also reaches its maximum value [ ] velocity is equal to zero [ ] magnitude of the velocity is between zero and Vmax 9. What can you say about the force (and acceleration) of the cart when the cart reaches its maximum displacement from the equilibrium position? __________________________________________________________ __________________________________________________________ 10. How many quarters of one period do you see in the picture on the right? [ ] 1 [ ] 2 [ ] 3 [ ] 4 11. In the box on the right sketch a graph for acceleration as a function of time matching the graphs x(t) and v(t) above. Write equations for all three graphs on the right (use your values for amplitudes and angular frequencies). 12. In terms of the period of the motion how much time (the minimum amount) does it take for the cart to travel from the equilibrium position to the zero velocity position? (you can use the graphs on the right) [ ] T [ ] T/2 [ ] T/3 [ ] T/4 [ ] T/5 [ ] T/6 [ ] T/7 [ ] T/8 Use your experimental data/graphs to answer questions 13 – 17 below (but if you are not sure, you can always find the answer algebraically). 13. How much time does it take to travel from x = A to x = A/2 (traveling the shortest possible distance)? [ ] exactly T/8 [ ] less than T/8 [ ] greater than T/8 but less than T/4

PY105LabVIII
4
14. If at t = 0 the cart is released from rest, hence at t = T/8 [ ] x = A/2 [ ] A/2 < x < A [ ] 0 < x < A/2 15. How much time does it take to reach the maximum velocity from rest (indicate the minimum amount of time)? [ ] T [ ] T/2 [ ] T/3 [ ] T/4 [ ] T/5 [ ] T/6 [ ] T/7 [ ] T/8 16. How much time does it take to travel from position with v = 0 to position with |v| = Vmax/2 (traveling the shortest possible distance)? [ ] exactly T/8 [ ] less than T/8 [ ] greater than T/8 but less than T/4 17. If at t = 0 the cart is released from rest, hence at t = T/8 [ ] |v| = Vmax/2 [ ] Vmax /2 < |v| < Vmax [ ] 0 < |v| < Vmax /2 18. For your equivalent system you can use equation x = Acos(wt) = Acos(2pt/T). Use it to calculate the first instant (in terms of period T) when x = A/2. Compare this answer with your answer to question 13. 19. For your equivalent system you can use equation v = -Vmaxsin(wt) = -Vmax sin(2pt/T). Use it to calculate the first instant (in terms of period T) when v = -Vmax/2. Compare this answer with your answer to question 16. Now change the page in your file from Page 1 to Page 2. This page gives you a different set of graphs. 20. Which one graph should you use to make a direct estimation for the effective spring constant of the system? Make the estimation (show your work). k = _______________

PY105LabVIII
5
21. Why does graph F(x) look like it looks? What does it show - the absolute value of the elastic force, or its x- component? 22. If the experiment would not have any errors, graph F(x) would be represented by one straight line. Write an equation for the linear function for the errorless graph F(x) (use your experimental value for the spring constant). F = 23. How does the period for the potential energy of the cart compare to the period of the oscillations? 24. In an empty box on the right sketch a graph for the kinetic energy of the cart as a function of time (remember, we neglect friction). 25. What is the period for kinetic energy of the cart in your experiment? TKE = ______________ Compare with the period of the motion. 26. In another box on the right sketch the graph for the total energy of the cart as a function of time (neglecting friction!). 27. Estimate the total energy of the cart using your data (show your work). Etotal =

PY105LabVIII
6
28. In general, what is the exact relationship between the maximum potential energy and the maximum kinetic energy of the cart (neglecting friction)? 29. Write the expression for kinetic energy of the cart, Ekinetic, (neglecting friction) as a function of position x (your expression might have some constants, too, but not time). Sketch a graph for Ekinetic as a function of position x. Part II: A simple pendulum. Go to the following link: http://physics.bu.edu/ulab/prelabs/prelab_SHM_new.html (the copy of the link is available in file py105Labweblinks) The simulation shows a simple pendulum making oscillations. You can change the length of the pendulum seven times. With the means of the applet you have to study how the period of the oscillations depend on the length.
1. Start the simulation and use it for measuring the period for each pendulum and then use the data to fill in the rest of the table (this part seems long, but it resembles the most of experiments in physics).
2. Does period change linearly with length? Comment [ ] yes [ ] no [ ] my results are inconclusive
l (m) 0.8 0.12 0.16 0.20 0.24 0.28 0.32 T (s)
�
l T2 T/l T2/l
T/
�
l

PY105LabVIII
7
3. Using your “experimental” data, write the mathematical relationship between period T and
�
l ; for that select only one row with the most clear data. 4. Using your “law” from the previous question, calculate the period of a simple pendulum with its length of 1 m.
5. Calculate the value of
�
2πg
(g is the free fall acceleration on the Earth) and compare to the value
�
T / l .
What conclusion can you make from this comparison?

PY105LabVIII
8
Equipment
Lab8:Oscillatingcartapparatus,balances,acomputer.
Unit layout L8: 180 minutes;
Part I: 100 minutes; Part II: 50 minutes; PE8: 30 minutes; Breaks when needed

PY105LabVIII
9
Practice Exercise 8 (30 minutes):
When suspended to a vertical stand, a massless spring is 20 cm long. If you attach to it a 100 g weight, it becomes 25 cm long (when in equilibrium). If now you pull on the weight so the spring becomes 30 cm long, and release the weight, the weight starts oscillating (up and down). Draw a picture, in the picture clearly show your choice for the positive direction of the axis and of the origin (choose vertical axis y pointing up, and the origin at the equilibrium position of the weight). Write the actual motion equation for the weight (i.e. the equation y(t)); in your equation the only variables you can have are y and t (the rest should be numbers!). Sketch the graph for position, y, as a function of time, t. Use your equation and calculate the location of the weight at t = T/8 (T is the period of the motion). Use your equation and find at least one time when the weight is at y = 2.5 cm. Sketch the graphs for velocity, vy, and acceleration, ay, as a function of time, t.