Pump schedule optimisation techniques for water distribution...
176
UNIVERSITATIS OULUENSIS ACTA C TECHNICA OULU 2013 C 472 József Gergely Bene PUMP SCHEDULE OPTIMISATION TECHNIQUES FOR WATER DISTRIBUTION SYSTEMS UNIVERSITY OF OULU GRADUATE SCHOOL; UNIVERSITY OF OULU, FACULTY OF TECHNOLOGY, DEPARTMENT OF PROCESS AND ENVIRONMENTAL ENGINEERING , SYSTEMS ENGINEERING LABORATORY; PATTANTYÚS-ÁBRAHÁM GÉZA DOCTORAL SCHOOL OF MECHANICAL ENGINEERING SCIENCES; BUDAPEST UNIVERSITY OF TECHNOLOGY AND ECONOMICS, DEPARTMENT OF HYDRODYNAMIC SYSTEMS C 472 ACTA József Gergely Bene
Transcript of Pump schedule optimisation techniques for water distribution...

ABCDEFG
UNIVERSITY OF OULU P .O. B 00 F I -90014 UNIVERSITY OF OULU FINLAND
A C T A U N I V E R S I T A T I S O U L U E N S I S
S E R I E S E D I T O R S
SCIENTIAE RERUM NATURALIUM
HUMANIORA
TECHNICA
MEDICA
SCIENTIAE RERUM SOCIALIUM
SCRIPTA ACADEMICA
OECONOMICA
EDITOR IN CHIEF
PUBLICATIONS EDITOR
Professor Esa Hohtola
University Lecturer Santeri Palviainen
Postdoctoral research fellow Sanna Taskila
Professor Olli Vuolteenaho
University Lecturer Hannu Heikkinen
Director Sinikka Eskelinen
Professor Jari Juga
Professor Olli Vuolteenaho
Publications Editor Kirsti Nurkkala
ISBN 978-952-62-0265-5 (Paperback)ISBN 978-952-62-0266-2 (PDF)ISSN 0355-3213 (Print)ISSN 1796-2226 (Online)
U N I V E R S I TAT I S O U L U E N S I SACTAC
TECHNICA
U N I V E R S I TAT I S O U L U E N S I SACTAC
TECHNICA
OULU 2013
C 472
József Gergely Bene
PUMP SCHEDULE OPTIMISATION TECHNIQUES FOR WATER DISTRIBUTION SYSTEMS
UNIVERSITY OF OULU GRADUATE SCHOOL;UNIVERSITY OF OULU,FACULTY OF TECHNOLOGY,DEPARTMENT OF PROCESS AND ENVIRONMENTAL ENGINEERING ,SYSTEMS ENGINEERING LABORATORY;PATTANTYÚS-ÁBRAHÁM GÉZA DOCTORAL SCHOOL OF MECHANICAL ENGINEERING SCIENCES;BUDAPEST UNIVERSITY OF TECHNOLOGY AND ECONOMICS,DEPARTMENT OF HYDRODYNAMIC SYSTEMS
C 472
ACTA
József Gergely B
ene
C472etukansi.kesken.fm Page 1 Monday, October 14, 2013 4:04 PM


A C T A U N I V E R S I T A T I S O U L U E N S I SC Te c h n i c a 4 7 2
JÓZSEF GERGELY BENE
PUMP SCHEDULE OPTIMISATION TECHNIQUES FOR WATER DISTRIBUTION SYSTEMS
Academic dissertation to be presented with the assentof the Doctoral Training Committee of Technology andNatural Sciences of the University of Oulu for publicdefence in Building MT (entrance from Bertalan Lajosstreet)of Budapest University of Technology andEconomics on 28 November 2013, at 2:30 p.m.
UNIVERSITY OF OULU, OULU 2013

Copyright © 2013Acta Univ. Oul. C 472, 2013
Supervised byProfessor Enso IkonenDoctor Csaba János Hős
Reviewed byDocent Raimo YlinenDocent Tapio S. Katko
ISBN 978-952-62-0265-5 (Paperback)ISBN 978-952-62-0266-2 (PDF)
ISSN 0355-3213 (Printed)ISSN 1796-2226 (Online)
Cover DesignRaimo Ahonen
JUVENES PRINTTAMPERE 2013

Bene, József Gergely, Pump schedule optimisation techniques for waterdistribution systems. University of Oulu Graduate School; University of Oulu, Faculty of Technology, Department ofProcess and Environmental Engineering, Systems Engineering Laboratory; Pattantyús-ÁbrahámGéza Doctoral School of Mechanical Engineering Sciences; Budapest University of Technologyand Economics, Department of Hydrodynamic SystemsActa Univ. Oul. C 472, 2013University of Oulu, P.O. Box 8000, FI-90014 University of Oulu, Finland
Abstract
This thesis deals with the pump schedule optimisation of regional water distribution systems. Theaims and the possible applications of the presented methods differ from each other; all of them areintended to solve a particular but realistic problem.
The developed techniques use the capacity of the water reservoirs in order to find the optimalpump-schedule of the system. The optimisation task is always deterministic and discrete in time;the stochastic behaviour of the water consumptions is approximated by expected values.
A so-called neutral genetic algorithm equipped with new constraint handling is presented first.The method is able to solve the scheduling problems of real-size and complex networks, e.g. thenetwork of Budapest with coupled hydraulic simulations where both variable and fixed speedpumps are in the network. The results are compared to other ones obtained by widely used geneticalgorithms and state-of-the-art general purpose optimisation solvers.
A dynamic programming based method was also carried out which provides the globaloptimum of the so-called ’combinatorial’ pump scheduling problems. This modelling type is verycommon in the industry, which can be used if the operation points of the pumps take discretevalues. The basic idea of the method is exploiting the ’permutational invariance’ of the modelwhich results in a perfect discretisation of the state space without any loss of information.
An approximate dynamic programming technique is also presented which solves the same typeof problems as the formerly mentioned genetic algorithm does. The technique splits the waternetwork model into smaller units, namely into the so-called well fields and the main distributionsystem. The state space of the main distribution system was further decreased while the quality ofthe results does not decay. A part of the test examples is the same as in the case of the formerpresented genetic algorithm; thus, the two methods can be compared.
Finally, a small water network fed by a single variable speed pump was investigated. Thepresented methods are based on the minimisation of the specific energy consumption. The gainedresults are compared to ones obtained using a high-resolution discrete dynamic program.
Novel optimisation techniques for water distribution network pump scheduling weredeveloped in this work. A particular focus was put on the dynamics between pumping, waterreservoirs, and water use. The work shows the applicability of the approach via numerous realisticsimulation case studies.
Keywords: dynamic programming, genetic algo- rithms, pump schedule optimisation,specific energy consumption, water distribution systems


Bene, József Gergely, Pumppauksen aikataulutuksen optimointitekniikoita veden-jakelujärjestelmille. Oulun yliopiston tutkijakoulu; Oulun yliopisto, Teknillinen tiedekunta, Prosessi- jaympäristötekniikan osasto, Systeemitekniikan laboratorio; Pattantyús-Ábrahám Géza DoctoralSchool of Mechanical Engineering Sciences; Budapest University of Technology andEconomics, Department of Hydrodynamic SystemsActa Univ. Oul. C 472, 2013Oulun yliopisto, PL 8000, 90014 Oulun yliopisto
Tiivistelmä
Työ käsittelee alueellisten vedenjakelujärjestelmien pumppauksen aikataulutuksen optimointia.Esitettyjen menetelmien tavoitteet ja mahdolliset sovellukset poikkeavat toisistaan. Kaikki onkuitenkin tarkoitettu tiettyjen todellisten ongelmien ratkaisemiseen. Kehitetyt tekniikat käyttä-vät vesivarastojen kapasiteettia optimaalisen pumppausohjelman löytämiseksi. Jokainen opti-mointitehtävä on aikadiskreetti ja deterministinen, vedenkulutuksen stokastista käyttäytymistäon approksimoitu odotusarvoilla.
Ensimmäiseksi työssä esitetään ns. neutraaleja geneettisiä algoritmeja varustettuna rajoitus-ten käsittelyllä. Menetelmällä voidaan ratkaista skedulointiohjelmia reaalimittakaavaisille jamonimutkaisille verkostoille (esim. Budapestin verkosto varustettuna hydraulisilla simuloinneil-la, sekä muuttuvanopeuksisilla että vakionopeuksisilla verkoston pumpuilla). Tuloksia verrataantoisiin yleisesti käytössä olevilla geneettisillä algoritmeilla saatuihin, sekä johtavilla yleiskäyt-töisillä optimointitekniikoilla saatuihin tuloksiin.
Työssä käytettiin myös dynaamiseen ohjelmointiin pohjaavaa menetelmää, jolla saadaan glo-baali optimi ns. "kombinatoorisille" pumppauksen aikataulutusongelmille. Tällainen mallinnus-tapa on hyvin yleistä teollisuudessa. Sitä voidaan käyttää, jos pumppujen toimintapisteet saavatdiskreettejä arvoja. Menetelmän perusajatuksena on "permutationaalisen invarianssin" hyväksi-käyttäminen, josta seuraa tila-avaruuden virheetön diskretointi ilman informaation häviämistä.
Työssä esitellään myös approksimoidun dynaamisen ohjelmoinnin tekniikka, jonka avullavoidaan ratkaista samantyyppisiä ongelmia kuin yllämainituilla geneettisillä algoritmeilla. Tämätekniikka jakaa vesijohtoverkoston mallin pienempiin yksiköihin: lähdekenttiin ja pääjakeluver-kostoon. Pääjakeluverkoston tila-avaruutta voitiin edelleen pienentää ilman, että tulosten laatuheikkeni. Osa käsitellyistä esimerkkitapauksista on samoja kuin edellämainittujen geneettistenalgoritmien osalla, joten tuloksia voidaan verrata.
Lopuksi tutkittiin pienen muuttuvanopeuksisella pumpulla syötetyn vesijohtoverkoston toi-mintaa. Esitetyt menetelmät perustuvat ominaisenergiankulutuksen minimointiin. Saatuja tulok-sia verrataan korkearesoluutioisella diskreetillä dynaamisella ohjelmoinnilla saatuihin tuloksiin.
Työssä kehitettiin uusia optimointitekniikoita vedenjakelujärjestelmien pumppauksen aika-taulutuksen optimintiin. Erityisesti työssä keskityttiin pumppauksen, vesitornien ja kuluttajienkäyttäytymisen väliseen dynamiikkaan. Työssä osoitettiin tekniikoiden toimivuus realististenesimerkkisimulointien avulla.
Asiasanat: dynaaminen ohjelmointi, geneettiset algoritmit, ominaisenergiankulutus,pumppauksen aikataulun optimointi, vedenjakeluverkosto


Bene, József Gergely, Optimalizációs módszerek vízellátó hálózatok szivattyú-üzemvitelének meghatározásához. University of Oulu Graduate School; University of Oulu, Faculty of Technology, Department ofProcess and Environmental Engineering, Systems Engineering Laboratory; Pattantyús-ÁbrahámGéza Gépészeti Tudományok Doktori Iskola; Budapesti Műszaki és GazdaságtudományiEgyetem, Hidrodinamikai Rendszerek TanszékActa Univ. Oul. C 472, 2013University of Oulu, P.O. Box 8000, FI-90014 University of Oulu, Finland
Kivonat
Jelen doktori disszertáció regionális ivóvízellátó-hálózatok üzemvitel-optimalizációjávalfoglalkozik. A bemutatott módszerek alkalmazhatósági köre rendszerint eltér egymástól,mindegyik egy-egy speciális, de a való életben is előforduló problémára kíván megoldást nyújtani.
A kidolgozott módszerek a medencék tárolókapacitását kihasználva, az optimális szivattyú-menetrendet keresve kívánják megtalálni az adott vízműhálózat üzemviteloptimumát. Azoptimalizáció egy időben diszkrét, ugyanakkor determinisztikus feladat megoldását igényli, avízfogyasztások sztochasztikus viselkedését a várható értékekkel közelítettem.
Elsőként egy új mellékfeltétel-kezeléssel ellátott, ún. neutrális genetikus algoritmusbemutatása a cél. A kidolgozott módszer alkalmas nagy, valós méretű (pl. Budapest) ésbonyolultságú (kapcsolt hidraulikai szimulációk, frekvenciaváltós és direkt szivattyúk ahálózatban) ivóvízhálózatok napi üzemvitel optimalizálására. Az eredményeket más genetikusalgoritmusokkal és a világ élvonalába tartozó, de általános célú optimalizációs módszerekkelhasonlítottam össze.
Kidolgozásra került egy dinamikus programozás alapú, a valós, globális optimumot adómódszer is. Az algoritmus a gyakorlatban elterjedt, ún. "kombinációs" hálózatként modellezhetővízműhálózat típusokra alkalmazható, ahol a szivattyúk munkapontjai diszkrét értékek. Amegoldás alapját az ún. "permutációs invariancia" jelensége adja, mely lehetővé teszi az állapottérinformációveszteség nélküli, tökéletes diszkretizációját.
Egy, a korábban bemutatott genetikus algoritmuséhoz hasonló problémakört megoldó, deközelítő dinamikus programozás alapú módszer is bemutatásra kerül. Az algoritmus a hálózatkisebb részegységekre (víztermelő területekre és fő elosztó hálózatra) való felbontásával és a főelosztó hálózat állapotterének önkényes, de a megoldás jóságán jelentősen nem rontócsökkentésével éri el a program futtatásához szükséges számítási igény csökkentését. Atesztfeladatok egy része megegyezik a genetikus algoritmus tesztfeladataival, így azokközvetlenül összehasonlíthatóak.
Végül bemutatásra kerül egy kisméretű, mindössze egy darab változtatható fordulat- számúszivattyúval táplált rendszer energetikai vizsgálata. Az itt bemutatott módszerek mind a fajlagosenergiafelhasználás minimalizálásán alapulnak. Az eredményeket egy nagyfelbontású dinamikusprogramozás alapú módszerhez hasonlítottam.
Kulcsszavak: dinamikus programozás, fajlagos energiafelhasználás, genetikusalgoritmusok, szivattyú üzemvitel optimalizálás, vízellátó hálózatok


Acknowledgements
I would like to express my gratitude to all those who strengthened my spirit and helpedme develop a little bit of sisu 1 in order to complete my doctoral studies: my Mom andother members of my family, my colleagues, and my friends.
I am deeply indebted to my supervisors Csaba Hos, Ph.D. and Prof. Enso Iko-nen whose help, stimulating suggestions, and encouragement helped me during myresearch.
I would like to give my special thanks to István Selek, Ph.D. who was not officiallymy supervisor, however, without his help this thesis would not have come into exis-tence. I am very grateful to László Kullmann, Ph.D. and Prof. Tamás Szántai for theirsuggestions about improving this thesis.
Financial support provided by the Hungarian State, the E.ON Hungaria Ltd., theCentre of International Mobility, the OPUS Project of the Academy of Finland, ErkkiPaasikivi Foundation, and Neles Oy:n 30-vuotissäätiö are gratefully acknowledged.
My room-mates Bence Farkas and Csaba Bazsó have deserved respect from my sidebecause they were able to tolerate me on my bad days and to be happy together with meon my good days.
Finally, I would like to thank Fanni for her love and for her encouragement in thelast but most troublesome months of this work.
1’Sisu is a Finnish term loosely translated into English as strength of will, determination, perseverance, andacting rationally in the face of adversity.’ Source: Wikipedia.
9

10

Abbreviations
Scalars are typeset in italic and can be both uppercase (X) and lowercase (x) letters.Vectors are usually bold lowercase (x) letters, or marked by an upper arrow
(�ξ)
in caseof Greek letters. Matrices are bold uppercase (X) letters. Units and other non-variablesare written in normal letters (kg).
There are some variables in this thesis that are used as scalars and as vectors as well.These are indicated here in their scalar forms.
Control related variables
c immediate cost (cost of action)CA-B connectivity matrix of A and B, e.g. pumps-nodes connectivity matrixJ associate cost (cost of being in a particular state)P permutational sets pump operating point identifier (ID)SA set of A, A can be arbitrary e.g. pumps, pipes, etc.t time indexT maximal time indexu control vectorw disturbance vector (hardly used)x state vectorX state space�ξ pseudo state vectorΦ pseudo state spaceπ control policy
Physical variables
A pipe useful cross section, m2
Atank reservoir (water tank) surface, m2
d pipe diameter, md water consumption vector, m3 (volumes for a time period for each node)f normalised pump frequency (1 @ nominal frequency)
11

g gravity, m/s2
L pipe length, mp total pressure, Pap pump power consumption, Wp power station power consumption, WRe Reynolds number, −Δt length of time period, sq flow rate, m3/sv reservoir actual water volume, m3
η efficiency, −λ pipe friction coefficient in the Darcy-Weisbach formula, −ρ water density, kg/m3
Note that apart from these abbreviations a different notation system can be found in inTables. 13 - 14 on page 119, which clarifies the dimensionless variables used only inChapter 5.
Acronyms
ADP Approximate Dynamic ProgrammingBEP Best Efficiency PointDDP Discrete Dynamic ProgrammingDNA Genotype in case of genetic algorithms (stems from DeoxyriboNucleic
Acid)DP Dynamic ProgrammingDP-LP hybrid Dynamic Programming-Linear Programming approachFDM Fully Discretised (network Model type)FHM Full Hydraulics (network Model type)FSP Fixed Speed PumpGA Genetic AlgorithmLP Linear ProgrammingLSEP Lowest Specific Energy consumption PointMGA Micro Genetic AlgorithmNAP Number of Active PeriodsNGA Neutral Genetic AlgorithmNGAF Neutral Genetic Algorithm with Full constraint handling
12

ORD Objective value Relative DifferenceSEC Specific Energy ConsumptionSLO Series of Local OptimaSR Success RateSRM Semi-Realistic (network Model type)VSP Variable Speed PumpVWM Variable speed pumps are only in the Well fields (network Model type)WDS Water Distribution System
13

14

Contents
AbstractTiivistelmäKivonatAcknowledgements 9Abbreviations 11Contents 151 Introduction 19
1.1 Introduction to water distribution systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.2 WDS from economical, practical, industrial, infrastructural point ofview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.2.1 Historical background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
1.2.2 Types of water distribution systems. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .23
1.2.3 Modelling water distribution systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
1.2.4 Economical aspects of water network operation, renewal, andestablishment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
1.2.5 Safety and infrastructural issues . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.3 Cost representation of the optimisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.3.1 Typical objectives . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
1.3.2 Possibilities to spare electric cost . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .30
1.3.3 Other requirements on the water network operation . . . . . . . . . . . . . . . 31
1.4 Mathematical formulation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
1.4.1 Physical interpretation of the variables . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
1.4.2 Typical modelling levels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
1.4.3 On the complexity of the problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
1.5 General literature and solver overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
1.5.1 An example genetic algorithm (GA) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
1.5.2 An example forward chaining discrete dynamic programmingalgorithm (DDP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
1.5.3 State-of-the-art solvers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
1.6 Thesis overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
15

2 Genetic Algorithm based optimisation method used for a wide rangeof pump scheduling problems 512.1 The problem to be solved . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522.2 The developed method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
2.2.1 Representation of the DNA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 532.2.2 Frame algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 532.2.3 Fitness evaluation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 562.2.4 Improved constraint handling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
2.3 Tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 612.3.1 Performance measurements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 612.3.2 Case study: optimisation of the waterworks of Budapest . . . . . . . . . . . 71
2.4 Summary and criticism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 752.5 Contribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 782.6 Tézis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3 An exact dynamic programming method for finding the globaloptimum of combinatorial pump scheduling problems 813.1 The problem to be solved . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 823.2 Discrete dynamic programming difficulties . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 833.3 The developed method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
3.3.1 Dynamic programming in control domain . . . . . . . . . . . . . . . . . . . . . . . . 853.3.2 Relaxed reservoir constraint system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
3.4 Tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .893.4.1 Search space reduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 903.4.2 Problem solving in the pseudo state space . . . . . . . . . . . . . . . . . . . . . . . . 913.4.3 Numerical results and comparisons . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
3.5 Summary and criticism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 923.6 Contribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 953.7 Tézis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
4 An approximate dynamic programming technique for solving a widerange of pump scheduling problems 974.1 Discretisation of variable speed pumps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
4.1.1 Illustrative example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 984.2 Splitting the model into subsystems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
4.2.1 The developed method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1004.2.2 Tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
16

4.3 Selection of the key reservoirs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1064.3.1 The developed method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1064.3.2 Test results . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
4.4 Summary and criticism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1134.5 Contribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1144.6 Tézis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5 Minimising the specific energy consumption in order to achieve theenergy optimum of system fed by a variable speed pump 1175.1 Motivation for using the specific energy consumption as objective
function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1205.2 The simplified hydraulic system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
5.2.1 Dimensionless pump performance curves . . . . . . . . . . . . . . . . . . . . . . . 1235.2.2 The hydraulic system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
5.3 The reservoir filling problem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1255.3.1 Infinitely large reservoir - the instantaneous optimal operating
point . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1265.3.2 Finite reservoir without consumption . . . . . . . . . . . . . . . . . . . . . . . . . . . 1275.3.3 Finite reservoir with constant consumption . . . . . . . . . . . . . . . . . . . . . . 131
5.4 Optimisation over finite time interval - 24-hour pump schedule . . . . . . . . . . 1335.5 Summary and criticism . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1365.6 Contribution . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1395.7 Tézis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 139
6 Conclusions 1416.1 Discussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1416.2 Critical assessment . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1436.3 Future directions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .144
References 147Appendices 155
17

18

1 Introduction
Pumping in potable and waste water systems consumes a significant part of all gener-ated electricity. This ratio is for example 5% in the United States (Feldman 2009) andsimilarly high in the European countries. Thus, reducing power consumptions in wa-terwork systems affects notably the amount of total consumed energy of a country, andplays a big role from the point of view of sustainable development and environment-protection.
This thesis focuses on the cost and energy optimisation of potable water systems.The aim is to present novel methods which are capable of finding near-optimal (or glob-ally optimal) solutions in cases of different types of water networks. For this purpose,this chapter introduces the basic concepts and definitions, which will be used in thelatter part of this thesis, and gives a detailed overview on the modelling of the optimi-sation problems from engineering and from mathematical point of view. The typicalsimplifications of the most realistic model are also discussed. The next part gives ageneral literature overview of the optimisation problems, however, additional literaturebackground on the particular topics is provided at the beginning of the chapters. Also,the basic concepts and definitions of a heuristic and deterministic method is shown.
Finally, the chapter describes the structure of the latter part of this thesis contain-ing the newly developed methods with their contributions and it summarises my mostimportant publications.
1.1 Introduction to water distribution systems
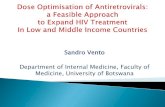
Fig. 1 depicts a model waterworks including the key elements of a real water distri-bution system. The primary objective for the control of the system is to satisfy theresidential and the industrial consumers (Mays 1999, Máttyus 1987). The building ele-ments of the system can be classified into active and passive categories (Cembrano et al.
2000). The active elements, namely pumps and valves, control the flow and pressure inthe system; and the decision variable consists of their operating states. Other elementsare used to be called as passive.
Pumps and pump groups deliver water between the nodes of the system (pressurezones). The operation of these pumps has a great influence on the overall energy
19

Constant speed pump (discrete flow rate,pump without frequency converter)
Variable speed pump (continuous flow rate,pump with frequency converter)
PowerStation
WaterReservoir
WaterSource
WaterReservoir
PowerStation
WaterReservoir
WaterReservoir
PowerStation
WaterSource
PowerStation
Waterconsumption
Water reservoir regulation valve(The valves of pumps are not depicted.)
Pipelinenode
Fig 1. A model water distribution system of minimal size but full complexity.
consumption of the system thus their operating points are the most importantvariables of the problem. They are either on/off-type pumps, which can be onlyswitched on or off; or pumps with frequency converter, where the flow rate is acontinuous variable. If two or more pumps are connected in parallel in an enginehouse, they build a pump group together.
Valves are usually used for controlling the flow of the reservoirs: they can set thereservoirs in filling, emptying, or closed state. They are mostly modelled as on/offtype valves because a half-opened valve would cause an undesirable operationthrough the significant energy loss.
Power stations: The pump groups consume electric energy, which is supplied bythe power stations. The price of the energy can change during the optimisationtime horizon and our goal is to satisfy the consumer demands with the smallestoperational cost. If the energy tariff is uniform, the cost optimisation gives also
20

the energy minimum.2 The total power of the pump groups which is connectedto the power station must not exceed a given limit.
Treated water sources: The amount of water which is fed into the network is ob-tained from water sources or wells. The exploitation of the wells must fulfilseveral technological requirements, e.g. the flow rate can be changed only fewtimes a day, and the wells have lower and upper daily exploitation volume limits.
Reservoirs: these elements represent the storage capacity of the network thus allow-ing the possibility of various controls. Also, due to e.g. fire safety issues, theyform important constraints for the problem, which are the minimal and maximalwater volumes (or sometimes formulated as water levels).
Pipelines, valves and bends serve as conveyors for the water. They cause energyloss which must be covered by the pumps.
Water demands exist in several nodes of the network and they are stochastic in thereal world (Ikonen et al. 2010, Ikonen & Bene 2010). When modelling, we canconsider this fact by defining them with any kind of distribution functions, or wecan approximate the reality by deterministic consumptions (by the expected valueof the stochastic consumption, see Bertsekas (2005).
A typical aim is to find the optimal control of the above detailed waterworks thuswe are looking for the operating points of the pumps for the next (typically) 24 hours,e.g. a series of rules telling when to switch them on and off. Since the pumps shouldnot be switched too often (because rapid starting and stopping shortens their expectedlifetime), the switching period is set to one hour, which turns the control problem intoa discrete problem in time.
If the problem is considered in its whole complexity, then we face a MIMO3 stochas-tic system. The stochastic behaviour of the system stems from the uncertainty of thewater demands; the inputs are the operating points of the pump groups, the outputs arethe water volumes (or water levels) of the reservoirs.
2The energy prices used in this work are scaled due to industrial request, however, the ratio of the cheap andexpensive periods remained the same.3Multi-Input Multi-Output
21

1.2 WDS from economical, practical, industrial, infrastructural pointof view
The cornerstone of any healthy population is access to safe drinking water (Mays 1999).Next to air, water is the most essential commodity to maintain life (Bhave & Gupta2006). One of the several words for water in Sanskrit, for instance Jeevanam, alsomeans life. In the ancient times, mankind used water only for satisfying its domesticdemands as drinking, cooking, bathing, and cleaning. Nowadays, water support is oneof the most essential public utilities also for the industry: water distribution systems arepart of the infrastructure of the cities and maintaining a water distribution system is notpossible without other partners of the infrastructure of the cities.
In this section, the importance of the water distribution systems is discussed fromeconomical, infrastructural, and safety point of view. Furthermore, a particular focusis put on the connection between these practical issues and the scheduling of waterdistribution systems.
1.2.1 Historical background
To understand the role and aim of such complex systems as water distribution network,it is always good to know about their evolvements. With this object a short historicaloverview is given; the information is mainly taken from Bhave & Gupta (2006) andMays (1999).
The water supply is coeval to the first civilisations. All antique cities and civilisa-tions were founded next to riverbanks, such as the Ganges, the Sindhu, the Tigris, theEuphrates, or the Nile. The first successful examples to control water can be foundin Mesopotamia and Egypt. 5000 years ago, in the valley of the river Sindhu, lotsof houses were equipped with their own bath through ceramic pipelines, and brickeddrainage system was established. The importance of the storage of water was alsorecognised: the first example is from India. Note that nowadays the storage capacityenables the operational optimisation in WDSs.
The ancient Rome is well-known for its well organised water supply system. Thewater, originated from more sources, was conducted in collector reservoirs from whichthe water was delivered through open channels and pressurised lead or bronze pipes.Water was available for all the citizens. The first regulation on water supply was alsoborn: in the case of thin runoff of the sources, first the houses of the citizens were
22

disconnected from the system. On drier days, the water supply of the aristocrats wasalso terminated but the baths, public fountains were still served.
Other examples for archaic water systems are e.g. Knossos and Greece, wherepressurised pipelines were found, or Turkey. The beginning of the modern water supplyis dated back to 1544 when the British Parliament expressed the right of London’sinhabitants for clear water. The first water supply systems (Boston, 1652; Shaeffer,1746) in this age still meant gravitational conduits and wooden water tanks from whichthe people were able to fill their buckets. The first pumps driven by steam-engines wereused in Bathelehem, Pennsylvania, 1764.
Water supply developed significantly during the 19th century. More complex, loopediron-cast pipeline networks were established with newly developed stop-valves, check-valves, and other controlling elements. The electrification of the pumps began in thefirst half of the 20th century. These networks were already structurally the same asnowadays, however, energy optimisation was for a long time impossible due to the poorcomputational capacity of computers.
1.2.2 Types of water distribution systems
The first discussed aspect is the type of the water sources which clearly affects thepossibilities of the water network operation. One possibility is using surface water likea river, e.g. the Danube in Budapest. Water is usually mechanically filtered by theshingly riverbank itself. Usually there are no restrictions for the amount of exploitedwater. Contrarily, in case of ground water wells, e.g. the city of Sopron in Hungary,there are strict constraints for pumping the water: the flow rate of the wells must beconstant during longer periods, and there are capacity limits as well. They must betaken into account while scheduling. The suitable disinfection process depends mainlyon the size of the pipeline: in case of smaller WDSs, a single ozone fertiliser is enough,but larger networks require protection also against re-infection: chlorine based methodsare typical.
Let us consider the structure of the network: the main types are serial, branched,or looped (Bhave 2003). Tiny waterworks usually have a serial pipeline system, whichconnects the pump and the reservoir. For bigger networks, branched (i.e. tree-shaped)topology is used. Both network types have the advantage of having a hydraulic be-haviour which is easy to model. Large WDSs usually have a looped structure. It meansthat the pipe network looks just like a net, the water can convey to a given demand point
23

through different paths depending on the hydraulic state and the control (schedule of thepumps and valves). The biggest advantage of the system type resides in the more safetyoperation: consumers (and fire service) can be supplied also when a part of the pipelineis broken. Besides, the structure helps avoid the stagnation of the water because the flowdirection in the pipelines varies. The drawbacks are the most expensive investment andmaintenance costs, moreover, the long running time of hydraulic simulations makes theoptimisation cumbersome when several thousand simulations must be performed.
Role of water reservoirs and geographical differences
The economical aspects of a water storage will be discussed later in Section 1.3.2 sincethey are the cornerstore of the shedule optimisation. Beyond their role of saving energy,water reservoirs are an essential part of water distribution systems also from technicalpoint of view.
Water distribution systems are divided into pressure zones, which are connectedwith pump groups. Flat areas have only one zone but a WDS over a hilly terrain containsmore. However, it is important to emphasise that even one pressure zone needs waterstorage in order to supply the consumes with pressurised water. Hence, the water isstored in high water towers usually built on plain areas, or in simple ’pools’ built on thetop of a hill.
The question may arise why not to supply the consumers directly through pumps.In that case, we would not need to build or maintain these huge objects called reservoirs.The answer is very logical. Aside from the economical advantages, which a reservoirprovides, it also means safety and trust on the system. A WDS must work in anycases and it must supply the domestic consumers, hospitals, and fire service. If anycatastrophe occurs, it often causes a power break while there is eager need for waterin hospitals for the newly injured people. Besides, water storage is needed in everydaysituations as well, such as during the replacement of an old pump or a broken pipeline.
In case of small consumption zones, ’towerless’ districts are also possible. Then thedemands must be satisfied through variable speed pumps (see the next part), and the fireservice must be organised by particular thoughtfulness from other zones, i.e. there mustbe a possibility to fill tank cars in the neighbourhood. Nevertheless, the bigger part of aWDS must always contain water reservoirs.
The size of the available water storage affects the operation habits of a WDS. Forexample in Tampere, Finland the storage capacity is almost half of the daily total water
24

demand (Katko & Juuti 2007). In that case, an energetically optimal, constant flow ratecan be set for the pumps (by local controllers) which satisfies the constraint that thedaily sum covers the demand. The question may arise how to define the energeticallyoptimal flow rate: it can be based e.g. on the maximisation of the efficiency or on theminimisation of the specific energy consumption. Also, the water level variation in thereservoirs can affect the optimal flow rate. This topic is further discussed in Chapter 5.
The central schedule optimisation usually means ’playing with the storage capac-ity’. There will be a detailed explanation later on how to exploit this phenomenon (seeSection 1.3.2). However, it is also important to know in case of which types of WDSswe can expect big benefits when we optimise the pump schedule centrally. If at leastone of the following requirements is fulfilled, one has to consider the optimisation:
– There are more pressure zones in the system, e.g. WDS of Sopron, see in Appendix1.2.1.
– There are several water sources in the system, e.g. WDS of Budapest, see in Ap-pendix 1.2.3.
– The useful capacity of the reservoirs are small, e.g. WDS of Szokolya, see inAp-pendix 1.2.2.
Typical examples with the above mentioned properties are Hungarian WDSs. The mostdiscussed test-networks also have similar attributes. Thus, three chapters of the disser-tation (Chapters 2-4) deal with this topic.
Role of pumps
Pumps deliver water between different pressure zones. They either fill the reservoirs orsupply the consumers with fresh water, or do both at the same time. In the past onlydirectly driven pumps were used, but variable frequency drives have been spread due totheir decreasing price in the last decades. Variable speed pumps make the control muchmore flexible, they allow to use the pumps economically even if there are big changesin the consumption habits.
Otherwise, in a huge network there is a high number of pumps. Equipping all ofthem with frequency inverter is impossible and, in addition, unnecessary. Usually morepumps run parallel within a pump group, and if one or two of them are VSP, it ensuresthe possibility of a very flexible control. Summarising the above mentioned, one can
25

conclude that mixed type WDSs (both FSPs and VSPs in the network) are the mostcommon worldwide and they will remain so for a long time.
The possible control levels of the pumps must also be discussed in a nutshell. Thetwo main possibilities are central regulation or the use of local controllers. In the firstcase one pump or an engine house with several parallel attached pumps can be con-trolled e.g. in order to keep the pressure or the flow as constant. On the other hand,central control can take into account more aspects at the same time, and it is suitablee.g. for overall operational energy optimisation.
1.2.3 Modelling water distribution systems
The hydraulic model of a WDS is an essential part of the daily operation. Waterworksneed a well-maintained model in order to
– analyse the hydraulic behaviour of the system, i.e. compute pressures, volume flowrates, chlorine concentrations, etc. and
– perform optimisation.
The computational accuracy and demand are always conflicting requirements; one hasto balance how detailed hydraulic model one should use for the given purpose.
Use of a calibrated model
Note that the calibration of the hydraulic model is crucial for accuracy. Calibrationmeans setting up the physical parameters of the system. Some of them are easy to iden-tify, e.g pipe length and diameters are known; but others, e.g. pipe roughness, valve losscoefficients need a thorough calibration process when computations and measurementsmust be compared until sufficient accuracy is reached.
A well-calibrated hydraulic model can be used for analysis and design purposes.In the case of analysis, the hydraulic behaviour of the system can be investigated. Adesign process can be traditional or optimality based (Bhave 2003). The traditionalmethod means that the designer specifies for example pipe sizes based on own expe-rience, then performs a hydraulic simulation, and checks whether the flow conditionsare suitable for supplying the consumers. In the case of recovery, a hydraulic modelcan help answer what would happen if one of the pumps were changed to a new onewith different characteristics. Optimisation methods do the same as traditional meth-
26

ods, but the parameters must be classified into two groups: some of them are fixed,which stem from model calibration or data sheets, and others can be varied, e.g. pipediameters, pump types, and mean the free parameters of the system. An objective, themeasure of goodness must also be defined, which expresses our aim, e.g. a combinationof investment and operational costs.
The modelling of water consumptions
The first aim of a WDS is supplying the water demands of domestic purposes, e.g.cooking, drinking, cleaning, bathing, air conditioning; public use, e.g. swimming pools,parks, and hospitals; commercial consumers, e.g. hotels, restaurants, car washing; andmanufacturers, Bhave & Gupta 2006.
The demands can be further classified into two groups (Máttyus 1987). Volumetric
demands arise when the consumers need a given amount of water e.g. for filling areservoir or drinking a glass of water. Another demand type is when the time of the
consumption is fixed, for example by washing hands, having a shower, etc. In this lattercase, the bigger the pressure in the network is, the bigger the consumption is. Thisphenomenon can result in significant wasting, however, it is paid by the consumers).
A water distribution system consumes a significant amount of water by itself, whichis called self-consumption. This is used mainly for cleaning purposes, e.g. washingthe reservoirs and pipelines, or consumed by the workers of the water company. Lostthrough leakage also means a remarkable amount of wasted money. Leakage is usuallypresent in a system, but their portion can be decreased by regular maintenance. Todetect leakages, a professional flow measurement system is needed, which also meansthe basis of an accurate billing system.
The forecast of these consumptions is a crucial part of any sising and schedulingprocesses. The forecast is highly challenging because of the stochastic nature of theconsumptions as they depend on plenty of circumstances: the city type (suburban or citycentre), the season, the weather, etc. Human operators need to have a great knowledgeand experience about the particular city where they work in order to satisfy all thedemands. One has to keep in mind that the presence of optimisation is just an extrapossibility after the waterworks have satisfied all of their obligations.
27

1.2.4 Economical aspects of water network operation, renewal, andestablishment
Water network optimisation often means operational optimisation. The most commonaim is to optimise the total electric cost of a system. This is the most important froman economical point of view; however, saving money can result also in saving energyand saving water. These latter aspects have at least the same importance since theyhelp not to waste the environmental resources. Maintenance costs can be also classifiedinto the group of operational costs; one can for example minimise the total runningtime of pump groups which are proportional to their service costs. It also has to bementioned that the parameter calibration, which is an essential part of any optimisation,costs money. The optimisation through operational scheduling is the main topic of thisthesis thus it will be detailed later.
Water network design and renovation are also popular research topics. In thesecases, the different planning horizons play significant roles. These are the economic life,physical life, period of analysis, and design period (Bhave 2003). Economic life meansthe time during the economic benefits of an element exceed the cost while physicallife means the period when the item is able to function. Period of analysis means theduration of the performed economic analysis while the system can supply the demandsin its design period (it needs maintenance, of course). These definitions suggest that theeconomic settlement, renewal, and operation make a coherent, complex task, which isbetter to be handled simultaneously. However, if the system is given and the waterworkshave no or limited budget, only the operational costs can be taken into account; but thisis often rather a political question and not an engineering one.
If we are in the position that we can take into account the economic aspects duringthe design or renewal phase, we have to balance between the operational and investmentcosts. A pipeline with bigger diameter costs more but the flow loss is much lowerthrough it. A more expensive pump has better efficiency and lower electric consumption.If the aim is feeding the network at various demands, a frequency converter can alsocover its investment costs within months. Building a bigger reservoir can allow us tomake more flexible pump schedules during the operation phase.
Smaller or bigger renewal of a WDS can be done for several reasons. It can be asimple replacement of an item, which cannot be repaired economically. Another optionis a planned renewal process, which is intended to make the operation of the systemmore economical. Significant change in the consumer demands also requires rebuilding
28

a system, such as the drastic decreasing of water demands in the post-socialist countrieswhen the water tariff doubled abruptly.
1.2.5 Safety and infrastructural issues
The primary aim of the pump scheduling of a WDS is satisfying all the residentialand industrial demands with high emergency reserve. If the water company could notserve potable water, it would lose its trustfulness. Moreover, the WDS must alwayssupply e.g. hospitals and the fire departments. For this reason, the water levels of thereservoirs cannot decrease below a given limit. Human operators usually keep the waterlevel much more above this limit, which has been already stated safety because they areafraid of causing emergency during their turn.
Note that not only scheduling affects the safety of a system, but bigger reservoirsmean bigger reserves as well. In the case of looped network, the consumers can besatisfied through different paths. It is also very important to understand that there isno such schedule optimisation software which can substitute human operators. Theycan use a pump scheduler as help in order to find more economic operation, but theystill have to have the possibility to act in any unexpected cases such as a broken pipe, apower break, or a pump malfunction.
One always has to keep in mind that the water suppliers are not just other compa-nies. They are one of the most significant parts of the infrastructure and their operationinfluences the economy, industry, and everyday life. Although the presence of tap waterseems natural, one must know that it is the result of a work of a finely aligned systemand people. Thus one must be careful when to do any changes in the system in order tooptimise something which is far less important than safety.
1.3 Cost representation of the optimisation
1.3.1 Typical objectives
The objective functions of a water distribution system can be various. Investments andoperational costs can be optimised in the planning or renovation phases as suggestede.g. by Clark et al. (2002) and Lauria (2004). The other possibility, which is themost common, is using only objectives of the water network, which are related to the
29

operation. Then the system is considered as it is, meaning that topological changescannot be performed.
The basic idea underlying pump (and valve) schedule optimisation is that the waterconsumptions can be satisfied by several different schedules. The electric energy usedby the pumps is the largest part of the total electricity bill of waterworks (Nitivattananonet al. 1996). Therefore, the total electric cost of the pumps over a finite time horizon isused as the most common objective function.
The number of switches of the pumps can be an alternative objective function. Itdescribes how many times the pump operating points are changed during the optimi-sation time horizon (Kullmann 2004). The total operation time of the pumps can bealso minimised (Cembrano et al. 2000). Both objective functions take into account themaintenance cost of the pumps: they are proportional to the deterioration of the pumps.
The maximum demand charge (McCormick & Powell 2003, Barán et al. 2005) isthe cost of the maximum power peak billed by the electric company. The water levelvariation in the reservoir can also be minimised (Barán et al. 2005). Water qualityproperties can also serve as objective functions (Sakarya & Mays 2000).
The objective functions can also be used simultaneously by aggregations, i.e. mul-tiplying them with weighting factors and summing them together, or by a real, multi-objective optimisation like in Barán et al. (2005).
1.3.2 Possibilities to spare electric cost
The key questions of the optimisations are how to exploit the storage capacity of thereservoirs in order to decrease the electrical expenses and how to find an optimal sched-ule within reasonable time. Computational demand and time play a significant rolesince operators need to generate new schedules in minutes in real-life circumstances.
The most obvious possibility for decreasing the workload costs is filling up thereservoirs during the time periods when electricity is less expensive and covering thewater demands from these reservoirs in the expensive tariff hours. The idea seems clear,but due to the large number of constraints (reservoir capacity, node pressure and powerlimits) and the mixed-integer type variables (constant and variable speed pumps) theproblem becomes highly challenging from mathematical point of view.
The second possibility of decreasing the expenses is reducing the power consump-tion itself. This plays a big role especially if the energy tariff is uniform, as in Hungary
30

and in Finland nowadays. In this case, the specific energy consumption of the pumps4
is a good quantity to describe the thrift of the system. Energy can be saved by using thepumps which have lower specific consumption values or using the pumps close to theirbest-efficiency points, which are determined by the revolution number and the state ofthe whole system. In these cases, the storage capacity is also essential: it allows to storethe spare water if the pumps deliver more water in their efficient operating points thanneeded.
1.3.3 Other requirements on the water network operation
Although the above mentioned rules of thumb seem obvious, determining the optimalschedule is a highly challenging task due to the constraints of the system. Some of theobjective functions can be transformed into constraints e.g. the switching number ofthe pumps, the maximum power peak of pump groups, water level variations, and waterquality properties (Cembrano et al. 2000, Máttyus 1987, Tolnai et al. 1995).
Besides, the capacity limits of the reservoirs, the exploiting limits of wells, nodalpressure limitations make the optimisation problem even more complex (Cembranoet al. 2000, Mays 1999, Mezura-Montesa & Coello 2011).
A precise description of the objective functions and constraints is given in Section1.4.1.
1.4 Mathematical formulation
First the optimisation problem is introduced from control theory point of view. Thephysical meaning of the variables are also mentioned here, but a more detailed explana-tion will be given in the next subsection.
Let us assume that we have a discrete, finite time horizon where the number of thetime periods is equal to T hence we have T +1 time instances to be distinguished. Thestate vector (e.g. water levels in the tanks), the control vector (e.g. volume flow ratesof the pumps), and the possible uncertainties (e.g. from water consumptions) are asfollows:
4The energy need for conveying a unit of fluid, kWh/m3.
31

Table 1. Index limitations for control-related variables.
Index limits
t time instance 0...T
Δt(t) length of time period 0...T −1
x(t) state vector 0...T
u(t) control vector 0...T −1
w(t) disturbance vector 0...T −1
In our cases, the initial state of the system x(0) is always known. The state evolutiondescribes the state in the next time instance:
x(t +1) = f(x(t),u(t),w(t), t) t ∈ {0,1, ...,T −1}. (1)
In case of water distribution systems, the probabilistic behaviour i.e. the presenceof the disturbance vector w(t) stems from the stochastic nature of the water consump-tions. They can be modelled explicitly by strategies like Open-Looped Feedback Con-trol (OLFC), or the randomness can be handled implicitly replacing the stochastic vari-ables by their nominal values, called Certainty Equivalent Control (CEC, Bertsekas2005). Martinez & Soares (2002) showed that the CEC approach often performs welland yields a near optimal solution hence during this thesis this modelling is used andthe disturbance vector is not needed:
x(t +1) = f(x(t),u(t), t) t ∈ {0,1, ...,T −1}. (2)
If a control action is performed, an immediate cost belongs to it:
c(x(t),u(t), t). (3)
The aim is to find the optimal control policy as a set of functions on the finite horizon:
π∗ = �π{π(x,0), ...,π(x,T −1)}, (4)
which maps the states into the controls
u(t) = π(x(t), t) ∀ t ∈ 0,1, ...,T −1 (5)
and minimises the cost function:
ob jective =T−1
∑t=0
c [x(t),π(x(t), t), t] (6)
32

with subject to the following constraints:
xmin(t)≤ x(t) ≤ xmax(t), (7)
gmin(t)≤ g(u(t),x(t)) ≤ gmax(t), (8)
where g is an arbitrary vector-vector function and the length of g, gmin and gmax are alsooptional.
1.4.1 Physical interpretation of the variables
Fig. 1 depicts a modest-sized water distribution system but it contains all the typicalelements which must be modelled in order to determine the optimal control policy. Ageneral overview of the possible modelling issues (objective functions, constraints) wasgiven in Section 1.3, here the exact mathematical formulation is introduced as used inthe latter chapters of the present thesis.
Since the pumps need significant time to reach their operating points, they are notallowed to be switched too often. Therefore, the optimisation problem is divided intoseries of time intervals; change of the control is only allowed at the beginning of theseperiods. Thus, the problem is discrete in time as it was assumed in the previous subsec-tion. A one-hour long time period is typically a good compromise between the accuracyand computational demand.
State and action space
The state space vector describes the actual water levels or the actual water volumes ofeach reservoir (Kumar et al. 2010, Cervellera et al. 2006). During Chapters 2-4 thewater volumes are used:
x(t) = v(t) (9)
while in Chapter 5 the water levels determine the state space:
x(t) = �α(t). (10)
The control space or action space refers to the status of the pump groups and valves,i.e. the active elements, (Cembrano et al. 2000)).
A pump group consists of one or more pumps which run parallel within the sameengine house. It is the smallest active element of the control which can be described by
33

Table 2. Pump group modelling. f stands for the normalised frequency, q for the flow rate,and s for the operating point identifier. n = n(i) is the possible number of (running) operatingpoints of the pump group, i is the index of the pump group.
Pump group By operating point By flow rateconsists of Modelling A Modelling B
Mixed1 single VSP u(t, i) = f (t, i) ∈ [0,1] u(t, i) = q(t, i) ∈ [0,qmax]
1 single FSP u(t, i) = s(t, i) ∈ {0,1} u(t, i) = q(t, i) ∈ {0,q1}2 or more FSPs u(t, i) = s(t, i) ∈ {0,1, ...,n} u(t, i) = q(t, i) ∈ {0,q1, ...,qn}
Pump group By operating point By flow rateconsists of Modelling C Modelling D
Discrete1 single VSP u(t, i) = s(t, i) ∈ {0,1, ...,n} u(t, i) = q(t, i) ∈ {0,q1, ...,qn}1 single FSP u(t, i) = s(t, i) ∈ {0,1} u(t, i) = q(t, i) ∈ {0,q1}2 or more pumps u(t, i) = s(t, i) ∈ {0,1, ...,n} u(t, i) = q(t, i) ∈ {0,q1, ...,qn}
its flow rate, motor frequency, or operating point identifier as shown in Table 2. In the
following, the term ’pump’ can also refer to a pump group.Valves can be classified into on/off type valves or continuous choking valves there-
fore the domain of the control variable of a particular valve can be {0,1} or [0,1]. Notethat valves are usually used to control the flows of the reservoirs and they must be in-volved in the control vector if and only if more reservoirs are connected to the samepressure zone.5 In this thesis, the control vector refers to the control of the pumps,
exceptions are always indicated.
The state evolution describes how the water volumes change in the reservoirs. Theimmediate cost is the total electrical cost of the pumps:
c(x(t),u(t), t) = P(x(t),u(t)) · r(t) ·Δt(t), (11)
which determines the objective function as well, where P denotes the consumed powerby the pump in kW and r is the electric tariff in e/kWh. An alternative immediate costis the so-called switching number (Kullmann 2004) which is equal to the number ofhow many of the operating points of the pumps have been changed compared to theprevious time period. The objective function is the total cost of the pump operation in
this thesis, exceptions are always clearly indicated.5Pressure zone means a part of the network located between the pressure side of one pump and the suctionside of another.
34

Constraints of a water distribution system
The meaning of the constraints of the state space (7) is obvious: it incorporates theminimum and maximum bounds of the reservoir volumes.
vmin(t)≤ v(t)≤ vmax(t). (12)
Note that vmin(t) and vmax(t) can vary during the optimisation horizon. The usual caseis that in the first T time period these values are constants
vmin(t) = v∗min
vmax(t) = v∗maxt ∈ {0,1, ...,T −1} (13)
and they differ only from the last, T th time instance when they must be typically in agiven range from the initial volumes (Δv− and Δv+ allowed difference):
vmin(T ) = max(v∗min,v(0)−Δv−) (14)
vmax(T ) = min(v∗max,v(0)+Δv+). (15)
The flow rates of the pumps can also be limited
qmin(t)≤ q(t)≤ qmax(t). (16)
If the control variable represents the flow rates of the pumps u(t) = q(t), this last con-stant can be easily eliminated by proper setting of the limits of the control variables. Inother cases it must be implemented as a real constraint.
For ground well pumps, additional constraints emerge due to technological reasons.The total exploited amount of water must be within given intervals:
vwellmin (i)≤
T−1
∑t=0
q(t, i) ·Δt(t)≤ vwellmax(i) ∀ i ∈ Swells (17)
and changing the control is not allowed at several prescribed time instances:
u(t, i) = u(t +1, i) if t ∈ Sno change ∀ i ∈ Swells. (18)
The power consumption of the pumps which belong to the same power station can-not exceed a given power peak.6
pmin(t)≤ Cpowp(t)≤ pmax(t), (19)
6These constraints are modelled as maximum demand charges in (McCormick & Powell 2003).
35

where pmin(t) and pmax(t) are the limits for the power stations (length: n), p(t) is theactual power consumption vector of the pumps (length: m) and Cpow is the connectivitymatrix with size of n×m.
Finally, the nodal pressures at the consumption points are regulated by local laws:
pmin ≤ p(i)≤ pmax ∀ i ∈ Sconsumption nodes. (20)
For particular example of the formulation of an optimisation problem see Appendix1.1.1.
1.4.2 Typical modelling levels
In this section typical water network models are introduced, which will be used later inthe thesis. All the models assume that the water consumptions (such as the initial watervolumes) are known, deterministic input data of the optimisation. The most complexmodel will be introduced first and the following sections contain more simplifications.
Model with full hydraulics (FHM)
At this modelling level, a coupled steady state hydraulic simulation is required for com-puting the state evolution and the immediate cost (Mays 1999, Fuzy 1991, Halász et al.
2002). Transient effects (e.g. starting process of pumps) are out of the interest due totheir small impact on the optimisation (Chaudhry 1987, Wylie et al. 1993).Step 1: Steady state hydraulic simulation
As a first step, the flow rates in each branch and the pressures in each node i.e. thesteady state solution of the network must be determined. These hydraulic models areknown as flow and pressure models, see Cembrano et al. (2000).
The starting point is always a very detailed hydraulic model of the water network,which usually contains tens of thousands or even more pipes and nodes. This modelmust always be reduced to a computationally feasible model through the process calledskeletonisation (Shamir & Salomons 2008, Jowitt & Germanopoulos 1992). The re-duced model is suitable for relatively fast steady-state simulations, an example is shownin Fig. 1.
A typical network model consists of pipes, reservoirs, pumps, pipes, and valveswhich are referred to as branches and nodes with possible water consumptions. In thebranches the flow rate and in the nodes the pressure values are unknown. Particular
36

equations can be determined for each branch and each node thus we obtain a non-linearequation system to be solved.
The so-called branch equations incorporate energy conservation: they describe theconnection between the volume flow rate and the pressure difference between the twonodes of the edge. A pump can be modelled as
pend − pstart = Aq2 +Bq+C. (21)
If the actual revolution number (nact) of the pump differs from the nominal (nnom), thecoefficients can be transformed by the well-known affinity laws (Mays 1999):
Aact = A, Bact = Bnact
nnom, Cact =C
(nact
nnom
)2
. (22)
A pipe can be modelled in several ways. Here the Darcy-Weisbach formula is shown:
pstart − pend = (hend −hstart)ρg+λLd
ρ2
q | q |A2 , (23)
where h is the geodetic height, ρ is the density, g stands for the gravitational accelera-tion, A for the cross section area, L and d are the pipe length and diameter. Note thatλ = λ (Re) is a function of the Reynolds number thus it depends on the flow rate as well.The edge equation of a valve, curve or other arbitrary element is modelled as
pstart − pend = ζρ2
q | q |A2 (24)
where ζ is a general loss coefficient. Finally, the equation of a reservoir gives theconnection between the state of the network (reservoir volumes) and the dynamics:
pstart =vactual
Atankρg+
{0 if q ≤ 0 (inflow)−ρ
2q|q|A2 if q > 0 (outflow loss)
(25)
where Atank is the surface of the tank itself while A is the cross section of the inflow oroutflow pipe.
The node equations describe the mass conservation. Since water density is consid-ered as constant, it means that the algebraic sum of the inflows and outflows equals tozero:
Ccontinuityq(t)Δt(t)−d(t) = 0, (26)
where d(t) is the consumption vector with size n. Note that the consumptions are con-sidered as volumes which expresses the fact that their flow rate is not uniform within
37

WaterReservoir
WaterReservoir
WaterReservoir
WaterReservoir
Pump (0)
Pump (1)
Hst
PipePipe
�p
q
Pipe
Pump (0) Pump (1)
H g�st
qpump(0) qpump(1)
qpump(0)qpump(1)
q pipe+ =
� �p = ppumps pipe
Mass conservation Energy conservation
Pumps Operationpoint
Fig 2. In case of small, non-looped networks, the steady state solution of the network canbe obtained graphically by the intersection of the resulting pump curve and pipe curve. Themass conservation (i.e. the volume conservation since the density is constant) and theenergy conservation can be easily observed.
a time period. q(t) contains the flow rates of the branches in a vector of length m andCcontinuity is the connectivity matrix of size n×m, where the elements are the following:
Ccontinuity(i, j) =
⎧⎪⎨⎪⎩
0 if branch j is not connected to node i
1 if branch j delivers water to node i
−1 if branch j delivers water from node i
(27)
The equation system (21-26) describes the steady-state flow conditions of a waternetwork and incorporates the mass conservation and the energy conservation as well. Insimple cases (small networks without closed loops) this equation system can be solvedanalytically or even graphically as Fig. 2 shows.
In the case of looped networks, the solution can be obtained via non-linear solverse.g. with Newton-Raphson method (Press et al. 2007). Note that during the solving pro-cess a couple of sparse linear equation systems must be solved (Salgado et al. 1988a)thus the selection of the appropriate linear solver has a significant effect on the compu-tational demand.Step 2: State space evolution
After solving the equation system, the new water volumes can be easily calculatedfor each reservoir:
v(t +1) = v(t)+q(t)Δt(t), (28)
where q(t) stands for the resultant inflows of the reservoirs.
38

Step 3: Energy consumption determination
The energy consumption of a pump can be obtained in the following form:
P =(pend − pstart)q
η, (29)
where the efficiency η at a given actual revolution number can be computed as
η = D(
nact
nnom
)2
q2 +Enact
nnomq+F, (30)
where D, E, and F are scalar constants of the particular pump.Step 4: Computing the cost and the constraint violations
At this point, all the data is available for computing the immediate cost and theconstraint violations.
Although this model is the most accurate, it has significant computational demandwhich makes its use cumbersome for optimisation processes, where several candidatesolutions must be evaluated. A typical example network is the base zone of Budapestin Appendix 1.2.3; a possible modelling of the control variable is shown in Table 2 asModelling A. Obviously, only single pumps can be modelled, pump groups must bemodelled separately as discrete pumps.
Semi-realistic model without coupled hydraulics (SRM)
If the friction loss and the water level variations in the reservoirs are negligible com-pared to the geodetic height differences, the operation points of the pumps are mostlydetermined by the latter ones. In that case the flow rate–consumed energy functions ofthe pumps can be obtained (usually measured) a priori
P = f (q) (31)
and there is no need for coupled hydraulic simulations. This model is often referredto as flow only model (see Cembrano et al. 2000). For a variable speed pump this canbe a real analytical function, for pump groups which consists of fixed speed pumps itis a set of flow rate–consumption pairs, see Fig. 3. Although this methodology givesup the computation of the nodal pressure values, the state evolution can be calculatedusing the continuity law (26) and (28), assuming that each pressure zone has only onereservoir. The control variable is directly the flow rate of the pumps
u(t) = q(t), (32)
39

0 50 100 150 2000
2
4
6
8
10
12
q [m3/h]
P [k
W]
0 50 100 150 2000
10
20
30
40
q [m3/h]
freq
uenc
y [%
]
0 20 40 60 800
2
4
6
8
10
12
frequency [%]
P [k
W]
Fig 3. Typical flow rate – power consumption pairs for a FSP group where coupled hydraulicmodelling is not needed. The diagrams show the operation points of Pump (5) measuredon the big Sopron network (Fig. 1.2.1) from 1st July to 31st July 2008. (Frequency refers tostatistical frequency.)
40

where q can contain even continuous and discrete values as it was shown in Table 2,Modelling B.
Variable speed pumps only in the well fields (VWM)
A common type of network (e.g. the waterworks of Sopron (Appendix 1.2.1) or Szokolya(Appendix 1.2.2) where the well-pumps which deliver the water from the wells to thedistribution system are variable speed pumps and the other pumps in the distributionsystems are fixed speed pumps. It is also a common assumption that the energy con-sumption of the well-pumps is negligible related to the whole system. However, theconstraints of the well field (Eqs. 17-18.) remain and therefore must be handled. Thecontrol space can be modelled as in the previous case (Table 2, Modelling B) but theabove mentioned advantageous property can be exploited by special type of optimisa-tion solvers.
Fully discretised model (FDM)
The fully discretised model is a further simplified description of the semi-realistic(SRM) model. The concept here is very easy: the flow rates of variable speed pumps andalso the consumed energy values are discretised. Then the control vector can containthe disretised flow rates themselves or just integer numbers which refer to the operatingpoints, as shown in Table 2, Modelling C and D.
This model is often referred to as combinatorial optimisation problem (Brion &Mays 1991, Cembrano et al. 2000).
1.4.3 On the complexity of the problem
As Section 1.4.2 clearly showed that the physical modelling of the water distributionsystem can be various, and so is the related optimisation problem. The introducedproblems are non-linear, heavily constrained problems, most of them are mixed-integertypes. However, there is a possibility to transform some of these problem types to apseudo-linear form.
41

Transformation of the optimisation problems into pseudo-linear form
The following methodology can be applied for the Fully discretised model (FDM) andVariable speed pumps only in the well fields (VWM) model of Section 1.4.2 withoutany further restrictions. The Semi-realistic model (SRM) can also be transformed inthis way if the connection between the flow rates and consumed powers of the pumpscan be modelled as linear.
The aim is to model the flow rate – power consumption pairs of the fixed speedpump groups with linear functions. Let us assume that the pump has n discrete oper-ating points which can be compressed in a vector as s = [s1,s2, ...,sn] and the corre-sponding volume flow rates and power consumptions are q = [q1,q2, ...,qn] and p =
[ p1, p2, ..., pn], respectively.Now make the s binary vector as control variable, which determines the current
operating point of the pump while q and p vectors are considered as constant input data.Then the linear connection between power and flow rate is the following:
qactual = sTqPactual = sTp
with subject ton
∑i=1
si = 1, where si ∈ {0,1}, (33)
which means that at the expense of having n binary variables instead of 1 discrete vari-able (with n possible values) and adding 1 additional constraint the problem turned intoa linear task. This property will be exploited in order to solve test problems with generalpurpose linear optimisation solvers on the NEOS (2012) server. However, it is importantto remember that although the mathematical description is linear, the meaning behindis non-linear.
Size of the free search space
Consider the simple network which can be found in Appendix 1.1.1 and which is thesmallest network presented in this thesis from those that do not require coupled hy-draulic simulation. Let us assume that the well flow rate is known, both pumps have3-3 operating points and the optimisation horizon is 24 × 1h. Thus, the free searchspace of the problem is (32)24 ≈ 8× 1022. If we made an unrealistic assumption thatone candidate solution can be evaluated using 103 CPU operation, then the World’scurrent fastest supercomputer (IBM Sequoia, 16.32× 1015 flop/s, source: Wikipedia)would solve the problem by an exhaustive search in approximately 150 years.
42

1.5 General literature and solver overview
Pumping of treated water represents the major fraction of the total operation cost inconventional water supply systems and even a small improvement in operational effi-ciency can cause significant cost savings to the industry. The need for optimisation istwofold: it is required either at the design stage of waterworks (Kadu et al. 2008, Alandiet al. 2005, I. Sarbû 2008, Koncsos & Balogh 2010) or more frequently the demand fo-cuses towards on operational level: having a given waterworks topology, one aims toachieve an optimal control of the active hydraulic elements (pumps, valves) satisfyingwater demand with minimal energy consumption. Sophisticated operation can result insignificant savings, even in small scale waterworks.
If sufficient storage capacity is available, the water demand can be satisfied with alarge number of pump schedules. As the energy consumption charge changes duringthe day or the specific energy consumption of the pumps7 are different, different overallenergy charges correspond to pump schedules and thus it is beneficial to find and realisethe most cost-effective one (Barán et al. 2005, Ormsbee & Lansey 1994, Coulbeck 1977,Tolnai et al. 1995, Fuzy 1991). However, human operators of water distribution systemsusually use heuristic ideas or rules of thumb to minimise costs.
Several researchers have been developing techniques for minimising the operatingcosts associated with pumping systems of water supply. A state-of-the-art overviewof the applied mathematical programming and spatial decomposition methods can befound in Mays (1999) and a detailed review is given in Ormsbee & Lansey (1994).Among these techniques, soft computing methods and metaheuristics became morepopular due to their robustness during the last decades, such as fuzzy logic (Angel et al.
1999, Vamvakeridou-Lyroudia et al. 2005), nonlinear heuristic optimisation (Ormsbee& Reddy 1995, Leon et al. 2000), genetic algorithms (Mackle et al. 1995, Savic &Walters 1997, Boulos et al. 2001, Labadie 2004, Tu et al. 2005), memetic algorithms(Zyl et al. 2004), particle swarm optimisation techniques (Baltar & Fontane 2008),colony models (Ostfeld & Tubaltzev 2008), and genealogical decision trees (Ikonenet al. 2012). Although these techniques are robust and more or less insensitive for themodelling (e.g. for non-linearities), they suffer from the lack of reliability: they can-not guarantee reliable results, one even cannot be sure whether they are able to find afeasible solution (which satisfies all the constraints) for a single run.
7The required energy for conveying a given amount of water.
43

Hence, deterministic solvers own a great fraction of the stake. Among those, dy-namic programming (DP) has long been recognised as a powerful tool and global op-timiser (Sabet & Helweg 1985). The dynamic programming itself guarantees to findthe global optimum at a given discretisation level, however, for this it requires a hugeamount of evaluations, which makes the problem computationally infeasible. Thus,the majority of the developed approaches place significant approximations in order toreduce the search space, see Chandramouli & Raman (2001), Tilmant et al. (2002), Ku-mar & Baliarsingh (2003), Mousavi et al. (2004), Cervellera et al. (2006), Kumar et al.
(2010), Darabos (1997).The modelling of the water consumptions also has a notable literature background.
Consumptions can be involved into the computations as deterministic or stochastic data.In the first case, where the water demands are modelled as deterministic from the opti-misation point of view (Certainty Equivalent Control, Bertsekas 2005), they are usuallydetermined a priori from statistics or by any forecasting approach (Bárdossy et al. 2009,Alvisi et al. 2007, Adamowski 2008). When the stochastic behaviour is taken into ac-count, the consumptions can be described by a priori determined distributions (Ikonen& Bene 2010, 2011, Cervellera et al. 2006) or the forecast model can be included intothe optimisation technique itself. In this thesis, the consumption data are known, deter-ministic data, obtained from the industry.
Further literature overview will be given on the particular topics at the beginning oflatter chapters.
1.5.1 An example genetic algorithm (GA)
For an illustrative example of soft computing methods, a basic genetic algorithm isintroduced here in a nutshell. The base idea of genetic algorithms (Holland 1975) is thesurvival of the fittest. A flow chart of the method is depicted in Fig. 4.
Coding As a first step, one should develop the coding of the individuals. One individ-ual represents one candidate solution thus it is characterised by a so-called DNAor genotype which consists of the control vectors for all the time periods:
DNA = {u(0),u(1), ...,u(T −1)}, (34)
which means that genetic algorithms look for the optimal solution over the wholecontrol domain simultaneously in each time period.
44

Evaluation
Selection
Terminate?
CrossoverMutation
No
YesInitialization Results
Replace-ment
Fig 4. Flow chart of a basic genetic algorithm.
Initialisation The first stage of run is the initialisation of the population. The pop-ulation is a set of individuals of a given number referred to as SoP (size of thepopulation). The initialisation means generating random numbers for all individ-uals’ DNAs which fit the requirements of the applied control vector. E.g. if apump can deliver 0-200m3/h) water, the random number can be generated fromthe interval [0,200]. If the algorithm is efficient, the initial population does notaffect the result of the run.
Evaluation The evaluation means that for all the members of the population the ob-jective values (i.e. the total cost) are determined.
∀ individual: ob jective =T−1
∑t=0
c(x(t),DNA(t), t) (35)
and the constraint violations, e.g. reservoir limit overfills, are calculated based onthe system dynamics (2). Using this data, the so-called fitnes-value or fenotype iscomputed, which is proportional to the goodness of the solution.
Selection Selection is responsible for choosing the parents. The fitter the individual is,the more chance it has to be chosen as a parent. A typical selection method is theso-called tournament selection. Here a given number (usually 2-3) of candidatesare chosen to compete with each other and the best will be kept for parent. Thisprocedure continues until we reach the required number of parents. Note that thetournament selection also gives the chance for individuals having lower fitnessvalues, which helps to keep the diversity of the population.
Crossover Usually 2 parents have 2 offsprings. The crossover operators can be alsovarious depending on the type of the DNA, i.e. on the type of the control vector.
45

An example of the crossover of floating point numbers is given below, where p1
and p2 are the floating point numbers from the parents’ DNA and c1 and c2 arethe corresponding values in the children’s DNA.
c1 = p1 + rnd · (p2 − p1) (36)
c2 = p1 − rnd · (p2 − p1), (37)
where rnd is a random number from the interval (0,1]. This representation gener-ates an offspring in the interval determined by the parents and another one outsideof it.
Mutation The mutation operator makes small random changes in the new individuals’DNA. Its role is to find new directions for the search. After mutation the newgeneration is born.
Replacement The replacement operator determines how the next population of indi-viduals is built from the newborn generation and the previous population. Thetwo extremes are as follows:
– The new population is exactly the newborn generation.– Only one solution is kept from the newborn generation and the other individu-
als are copied from the previous population.
An effective replacement operator depends on the solvable problem and worksbetween these extremes.
Terminating condition It is hard to say when the convergence of the algorithm isreached thus the run usually continues until a given number of individual evalua-tions.
In the latter part of this section, basic definitions of genetic algorithms are intro-duced. The parameters of the above described standard genetic algorithm can be various.The size of the population described how many individuals there are in one population,which is usually a constant number. Generations mean the populations followed byeach other during the run, and the number of generations refers to how many cyclesare finished until the termination condition. The number of evaluations is usually theproduct of the population size and the number of generations.
Each candidate solution has one or more objective values and constraint violationvalues; an operator maps them to a fitness value. The solutions which do not satisfyall of the constraints are called infeasible solutions otherwise we speak about feasible
solutions. If a single run results in finding at least one feasible solution, it is a feasible
46

EvaluationStep forward
t=T ? Filtering
No
Yes
Discretization
Results
Initialization
Fig 5. Flow chart of a basic dynamic programming algorithm.
run, otherwise infeasible run. In the case of a batch run, the success ratio is defined asfollows
SR =number of feasible runs
all runs. (38)
1.5.2 An example forward chaining discrete dynamic programmingalgorithm (DDP)
For an illustrative example, a basic dynamic programming method for finding the op-timal control of a water distribution network problem is introduced here in a nutshell.Usually a DDP method works backwards, but here the forward chaining algorithm is in-
troduced since this concept will be used in all the cases in this work. A general overviewon dynamic programming can be found in Bertsekas (2005) and in Powell (2007). Theflowchart of the algorithm is shown in Fig. 5.
A possible interpretation of the state vector x(t), control vector u(t), state evolution,and immediate cost c(x(t),u(t), t) were already introduced at the beginning of Section1.4. The associate cost J(x(t), t) gives the total cost of the schedule until time period t
if the state of the system is x(t) in period t. Dynamic programming approaches exploitgracefully the sequential property of decision making in contrast to genetic algorithms,which look for the optimal solution over the whole control domain.
Discretisation For practical use, the state space and the action space must be discre-tised if they are not discrete physically. The proper choice of the discretisationlevel is always a compromise between computational demand and accuracy.
Initialisation Initialisation means to determine the initial state of the system in con-trast to genetic algorithms where it meant to generate random candidate solutions.
47

Let us assume that the initial state of the system x0 is known with a zero associatecost: J(x(0),0) = 0.
Stepping forward During this stage, the algorithm performs all the possible controlactions for all the existing states at time t. The state evolution tells what the statesare in the next time instance t +1.
Evaluation The immediate cost must be calculated for each control action which isdone by stepping forward.
Filtering If more solutions are present in one cell of the state space at time instancet + 1, only the best one can be kept. This procedure is based on the well-knownBellman-equation, whose forward chaining form is used in this thesis:
J(x(t +1), t +1) = minu(t)
[J(x(t), t)+ c(x(t),u(t), t)] . (39)
This equation gives the principles of dynamic programming and ensures that theassociated cost for a state cell is optimal at a given discretisation level. Note thatthe classic form of the Bellman-equation works backwards but in this thesis aforward form is preferred due to the fact that the initial state is always known inthe case of WDSs. However, it must be emphasised that the algorithm must beused in exactly the same way as the original algorithm, i.e. all the states have tobe considered. All the later detailed algorithms do so.
Termination The iteration process continues until it reaches the end of the time hori-zon.
The use of the Bellman-equation significantly decreases the search space, however,this is typically too large for effective computer-codes. This phenomenon is knownas the curse of dimensionality (Powell 2007). Despite the enormous computationaldemand, the method is still very popular because it guarantees the global optimum fora given discretisation.
1.5.3 State-of-the-art solvers
The results obtained by the approaches developed during my doctoral research are com-pared to one or more solvers of the NEOS Server, NEOS (2012). This is a collection ofrecent state-of-the art, general purpose optimisation techniques which are available forfree for research use via Internet. These comparisons always stand only for illustrativeinformation because of the following reasons:
48

– We do not know anything about the performance of the NEOS server machines.– The NEOS solvers are general purpose optimisation methods for solving arbitrary
systems while the newly developed methods of this thesis are specialised for solvingwater distribution systems.
– Most of the optimisation methods can be transformed to linear problems as it wasshown in Section 1.4.3 but we should not forget that the physical meaning behind isnon-linear.
1.6 Thesis overview
The aim of the present thesis is to introduce novel techniques which are developed forsome typical models (Section 1.4.2) of water distribution schedule optimisation prob-lems. Naturally, claim for other modelling levels may arise from the water industrywhich cannot be solved by the presented methods but I believe that a large spectrum ofthe real problems are covered by them.
Table 3. My most important journal publications.
Title Reference Related to
Neutral Search Technique for Short-Term Pump Scheduleoptimisation
Bene et al. (2010) Chapter 2
Optimal (short-term) pump schedule detection for waterdistribution systems by neutral evolutionary search
Selek et al. (2012) Chapter 2
Water Network Operational optimisation: Utilising Sym-metries in Combinatorial Problems by Dynamic Program-ming
Bene & Selek (2012) Chapter 3-4
Comparison of deterministic and heuristic optimisationsolvers for water network scheduling problems
Bene et al. (2013) Chapter 4
Finding Least-Cost Pump Schedules for Reservoir Fillingwith a Variable Speed Pump
Bene & Hos (2012) Chapter 5
The next four chapters present four solving techniques: Chapter 2 is dealing witha genetic algorithm which is intended to find the near-optimal solution of ’arbitrarily’big systems, also in the cases where coupled hydraulic simulation is needed. Chapter
49

3 shows a type of dynamic programming method which provides the exact global opti-mum of combinatorial pump scheduling problem of middle-sized networks while chap-ter 4 describes approximate dynamic programming techniques for bigger networks. Inchapter 5 a technique for optimising the energy consumption of a variable speed pumpis shown. Here, the emphasis is not put on the achievement of the optimal solution butrather on understanding the optimality of the operation of a small-sized network. Ta-ble 3 summarises the most important publications related to these chapters, however, amore detailed list is given at the end of each Contribution section.
The structure of these four chapters are similar. After defining the current prob-lem and the aims, a literature overview is given on the particular topic, which clarifiesthe drawbacks of the state-of-the-art techniques. Then the developed approach is pre-sented, which is intended to reach novel scientific results. As a next part, numericaltests demonstrate the efficiency of the new approach. At the end of each chapter, thesection Summary and criticism summarises the achievements and discusses the advan-tages, drawbacks, and the limits of applicability. It is followed by the sections Con-
tribution and Tézis which are very short syntheses of the new scientific results both inEnglish and in Hungarian.
The last chapter of the thesis gives a summary and investigates the possible direc-tions of further research.
The appendices involve the test networks which were used for the investigationsand some less significant numerical results.
50

2 Genetic Algorithm based optimisationmethod used for a wide range of pumpscheduling problems
The aim of this chapter is to present a novel heuristic optimisation technique whichgives near-optimal pump schedules for real size and complex water distribution sys-tems. The only significant simplification of the method is that it considers the waterconsumptions as known, deterministic data (expected values are used). Any other ef-fect can be taken into account: mixed-type variables, non-linearity through coupled hy-draulic simulations, large variety of constraints. The chapter introduces a novel geneticalgorithm based technique and then compares it to several other methods. The effectsof the improvements are also shown. Finally, case studies on real water networks arepresented.
The evolutionary algorithms are very popular in the field of complex optimisationproblems due to their robustness against non-linearities, non-convex search spaces,large constraint systems, and mixed type variables. Often used techniques in case ofwater distribution systems are genetic algorithms (Holland 1975). The subject of thefirst pump schedule optimisation application of GAs was a serial water pipeline (Gold-berg et al. 1987) while the first optimisation problem of a complete WDS was solvedby Simpson et al. (1994). Mackle et al. (1995) was the first who used a binary GA inorder to achieve the optimal solution of pump scheduling problems. The first industrialapplication was presented by Atkinson et al. (2000) and real-time computations werereported by Rao & Salomons (2007). A critical overview on various types of watermanagement problems solved by GAs can be found in Nicklow et al. (2010).
The basic idea behind the genetic algorithms (see Section 1.5.1) is to simulate thenatural selection, the survival of the fittest (Darwin 1859). Although these algorithmsperform well on numerous problems, usually highly specialised novel methods are re-quired to avoid the most common drawbacks of genetic algorithms, such as the too earlyconvergence.
Every evolutionary method aims to find a good trade-off between the explorationand exploitation search phases in order to achieve good performance on optimisationproblems (Selek 2009). These phases can be directly linked to population diversity:
51

during the exploration phase the diversity is high and the algorithm identifies the poten-tial regions of the search space where the optimum can be located. In the exploitationphase a local search around a potential optimal solution candidate is performed result-ing a gradual decline in population diversity. Maintaining balance between these twophases is crucial to reach good performance on search problems by evolutionary algo-rithms.
In the presented method the balance is reached by applying three different theories.First, the algorithm is embedded in a micro–genetic algorithm framework (Khrisnaku-mar 1989) which helps keep the computational demand as low as possible with takinginto account the above clarified theory. Second, applying neutrality (Lehre & Haddow2005) in the objective value-fitness mapping (Selek 2009) helps keep the diversity ofthe population on a high level. Last but not least, an improved constraint handlingmethod makes the algorithm even more efficient (for a general overview on constrainthandling techniques see Mezura-Montesa & Coello 2011, Michalewitz & Schoenauer1996, Coello 2002 and Wang et al. 2008).
2.1 The problem to be solved
The method introduced below is intended to solve the general water distribution pumpscheduling problem which was described in Section 1.4. On the next pages, a solutionmethod without coupled hydraulic simulation (SRM model) will be shown, however, ina case study (Section 2.3.2) the approach will be extended in order to solve the problemin its full complexity (FHM model).
The state space represents the water volumes in the reservoirs and for modelling theaction space, Modelling A from Table 2 can be used:
x(t) = v(t)u(t) = [sT(t) fT(t)]T,
(40)
where s(t) contains the operating point identifiers of the fixed speed pumps and f(t)stands for the frequencies of the variable speed pumps which are normalised into theinterval [0,1]. The possible constraints are given in Section 1.4.1, from these the follow-ing constraints are taken into account: water reservoir volumes (12), power station peakpowers (19), well daily exploitation limits (17), and well switching limitations (18).
52

2.2 The developed method
2.2.1 Representation of the DNA
The representation (genotype) of the individuals incorporates the daily schedule of dis-crete and continuous pumps. This can be illustrated as follows:
DNA = [1,3,2, ...,6]︸ ︷︷ ︸0th time period
, ... [...],︸︷︷︸(T−1)th time period
[0.88,0.45, ...,0.95]︸ ︷︷ ︸0th time period
, ... [...],︸︷︷︸(T−1)th time period
[0.79,0.87, ...,0.65]︸ ︷︷ ︸0th switching period
, ... [...]︸︷︷︸(Nsp−1)th switching period
(41)
Genes which are located at the beginning of the chromosome contain integer numbersdescribing the operating points of discrete pumps in time periods while genes locatedon the tail of the chromosome correspond to continuous pumps having floating pointvalues normalised to interval [0, 1]. Some of the variable speed pumps are used fordelivering water from wells thus the control change is forbidden during prescribed timeperiods:
f (t, i) = f (t +1, i) if t ∈ Sno change ∀ i ∈ Swells, (42)
which is equivalent to the former introduced constraint (18). To eliminate it at therepresentation phase, in the case of well pumps the number of genes corresponds to thenumber of switching intervals. Fig 6 shows the relationship between time periods andswitching periods of the wells.
The introduced representation clearly determines the control vectors u(t) for t ∈0,1, ..,T −1.
2.2.2 Frame algorithm
As a search engine, a Micro-Genetic Algorithm (MGA) proposed by Coello & Pulido(2001) was implemented. The approach establishes connection between a static exter-nal memory, and a genetic algorithm using a small population called micro–geneticalgorithm where the population size is less than 10. In this scheme the micro–GA pro-vides the search operating with candidate solutions (individuals) while external memoryis used as the source of diversity and for storing the candidates previously found. Theflowchart of the algorithm can be seen in Fig. 7.
53

{ { {
{ { {
timeperiods:
switchingperiods:
0 1 T-1
10 N -1sp
switching is not allowed for well pumps for these time instants
Fig 6. Connection between time periods and switching periods of the wells.
When the search begins, a random8 population is generated to fill the external mem-ory, and it is evaluated. At the beginning of each micro-cycle, a fraction of micro–population is filled by randomly chosen individuals from the external memory and therest is randomly initialised. In each micro-cycle, the micro-GA uses general geneticoperators: deterministic binary tournament selection with replacement (Eiben & Smith2003), uniform or one–point crossover9, mutation, elitism, and replacement. The uni-form or one point crossover is applied only on the integer part of the chromosome whilethe floating point tail uses only extended intermediate recombination scheme (Mühlen-bein & Schlierkamp–Voosen 1993) for information exchange. Under mutation eachgene position (locus) has a certain probability to be changed. Integer value in the chro-mosome is added to ±1 while floating point encoded positions randomly change withinthe interval ±0.005 around their original values using uniform distribution. An elitismoperator keeps the best individuals in the population preventing the loss of the currentbest candidate solution(s) by the replacement operator.
Under micro cycle the population evolves until a nominal convergence (Goldberg1989) is reached which is defined as upper limit for the number of objective functionevaluations. After the micro-cycle is finished, interaction between the micro–populationand the external memory is accomplished by the memory handler. The handler receivestwo best individuals chosen from the micro population, compares them to the contentsof the external memory, and replaces old memory members with incoming new candi-date solutions if the outcome of a comparison is positive.
Two techniques are used for comparison:
8Random individuals are generated using uniform distribution over search space.9Both crossover operators have the same probability to be performed.
54

External Memory
Memory Handler
Termination criteriasatisfied?
ma
in-c
ycle
Initialization
RandomIndividuals
Individuals fromexternal memory
Randominitialization over search space
uniformly distributed
Integer / Real valueddirect representation
chromosomeencoding with
Randominitialization over search space
uniformly distributed
Generational / Dynamic Generati-onal Gapreplacement (only non elitindividuals are replaced)
Random changes(uniform) inchromosome alleles within
of their valuesa given
range
One point / uniformcrossover
Replacement
Binarywith replacement
deterministic tournamentselection
Fittest individual(s)of the populationare kept
Fixed number ofobjective functionevaluations
Fixed number ofobjective functionevaluations
Replace the /candidate solution(s) in externalmemory by micro-GA individual(s)
worst most similar
Best solution so far
Fig 7. The flowchart of micro-genetic algorithm. (Selek et al. 2012, published by permissionof Elsevier).
55

– Replace the worst candidate solution of the memory if its fitness is lower than theincoming individual’s fitness (Whitley 1989).
– Replace the most similar one in the memory if its fitness is lower (De Jong 1975).
The handler randomly decides which method (a or b) is used; each technique has50% probability to be picked.
This interaction process between external memory and micro-GA continues until afixed number of objective function evaluations is exhausted; this is used as terminationcondition. The above detailed Micro–Genetic Algorithm framework was implementedin C++ programming language.
2.2.3 Fitness evaluation
In the presented technique the constraints are separated from the cost function in sucha way that strictly ensures the superiority of feasible solutions (which satisfy all con-straints) over infeasible ones. This idea was first proposed by Powell & Skolnick (1989)and later used by Deb (2000). Following their work, the algorithm uses a heuristic rulefor processing infeasible solutions: evaluations of feasible solutions are mapped intothe interval [0, ∞) and infeasible solutions into interval (−∞, 0). Since the problem issolved by evolutionary methods, fitness for candidate solutions must be calculated
f itness(DNA) =
{1 if feasible−tv(DNA) otherwise
(43)
where tv is the total constraint violation function which is computed as follows: first, ageneral error function must be defined over a scalar variable z with respect to its lower(zmin) and upper (zmax) limit:
er(zmin,z,zmax) =
⎧⎪⎨⎪⎩
(zmin − z)β if z ≤ zmin
0 if zmin ≤ z ≤ zmax
(z− zmax)β if zmax ≤ z
(44)
where β is an arbitrary positive number. By introducing neutral theory, the error func-tion used in the developed approach is
er(zmin,z,zmax) =
⎧⎪⎨⎪⎩
1 if z ≤ zmin
0 if zmin ≤ z ≤ zmax
1 if zmax ≤ z
(45)
56

With this, the constraint violations can be formulated for reservoirs, power stations, andwells. Note that the first two are functions of time while the latter one is interpreted onthe whole optimisation horizon.
cvres(DNA(t)) = ∑i∈Sreservoirs
er [vmin(t, i),v(t, i),vmax(t, i)] (46)
cvpow(DNA(t)) = ∑i∈Spower stations
er [Pmin(t, i),P(t, i),Pmax(t, i)] (47)
cvwell(DNA) = ∑i∈Swells
er
[vwell
min (i),T−1
∑t=0
q(t, i) ·Δt(t),vwellmin (i)
]. (48)
Finally, the total constraint violation can be expressed as
tv(DNA) =T−1∑
t=0[cvres(DNA(t))+ cvpow(DNA(t))] · sc(DNA(t), t)+
+cvwell(DNA),(49)
where sc(DNA(t), t) is a scaling function which will be discussed in details later, nowconsider it to be 1, i.e. sc(DNA(t), t)≡ 1.
A short discussion on neutrality
Under the theory of neutrality fitness is assigned to the partitions of the search spaceinstead of one particular element on the search space. The individuals, which are mem-bers of the same partition are treated as equal, i.e. they have equal probability to prop-agate their encoded information through generations. In neutral theory these partitionsare called neutral sets.
Using (43) for fitness computation, an extreme neutrality is introduced on the searchspace by objective–fitness transformation. Assigning the fitness value 1.0 for feasibleindividuals makes the complete feasible set to be a neutral set having equally fit candi-date solutions.
A modified error function was used for fitness computation for the infeasible state.The interpretation of (45) is simple, the modified error function gives a boolean–typeinformation about only the constraint violation: the value is 1 if the constraint is violated(e.g. reservoir levels are out of the given boundaries), otherwise 0. This transforms thevector of constraint violations into a binary one where the number of ones equals thenumber of unsatisfied constraints. Unlike the original error function (44), which uses
57

information about the rate of constraint violation calculating how far the solution isfrom the feasible region, the modified error function does not consider the distance ofan individual from the feasible set. A similar idea was first hinted by Morales (1998)who incorporated the number of constraint violation in the fitness function using penaltyapproach.
2.2.4 Improved constraint handling
Avoiding predictable infeasibility - computing the dead storage range
So far the boundaries of the reservoir levels were fixed regardless of time which wereoriginated from the original constraints. Indeed, if one aims to achieve good perfor-mance during the constraint handling phase of the optimisation, it is necessary to findout a ’reasonable’ time–dependent constraint system for water reservoirs in order to fil-ter out solution candidates which may lead the system into dead reservoir levels (Kumar& Baliarsingh 2003, Bene & Hos 2010). If the water level of a reservoir lies in the deadzone at time t, there is no corresponding pump action to reach the feasible region of thereservoir at time t +1 although the initial state at time t is feasible.
Dead reservoir levels can form due to the fact that the reservoir level constraintsare usually stricter at the end of the optimisation period (t = T ) than before (t < T ),resulting a ’sudden jump’ in constraint system (see Fig. 8). By implementing smooth,relaxed reservoir constraints in time, the candidate solutions are not allowed to evolveinto dead storage spaces from which not all the constraints in the system can be satisfied.This ensures the avoiding of the drift of the candidate solutions towards a fix point fromwhich it is not possible to escape by any pump action while increasing the success rateof the optimisation.
Incorporating the notation used in section 1.4, the following equations were used inorder to find out a time dependent corridor as relaxed constraint system for reservoirs:
vmin(t) = max[vmin(t),vmin(t +1)−d(t)−Cinflowqmax(t)Δt(t)
], (50)
which must be computed backwards (t = T −1, . . . ,0) where qmax(t) denotes the vectorof possible maximum pump flow rates. In the cases where hydraulic simulation isneeded, this value must be an upper approximation. Cinflow is the connectivity matrixwhich considers only input flows into the reservoirs by the corresponding pumps. It canbe built similarly to (27), but the -1 values must be changed by zeros.
58

0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 242500
3000
3500
4000
4500
5000
Time [h]
Wat
er le
vel [
m3 ]
Dead storage
Initial conditionMaximumMinimumTime−dependent minimum
Fig 8. Relaxed constraint system for Water Reservoir 5 of the Sopron network, see Appendix1.2.1. (Selek et al. 2012, published by permission of Elsevier).
Since reservoir level constraints at the end of the optimisation period are constructedrelative to the initial water level, the higher the initial water level in the reservoir is, thegreater the area of the dead zone is. Fig. 8 shows a relaxed constraint system for waterreservoir 5 of the Sopron network (Appendix 1.2.1).
Notes for using the dead storage conversion
The dead storage corridor for the upper water limit of the reservoirs can be similarlyconstructed as in (50) with the only difference that there the outflows must be taken intoaccount. However, using sophisticated limits for the upper levels is usually senseless:the energy or cost optimisation itself aims to keep the reservoir limits at the last periodas low as possible; thus, the ’sudden jump’ at the last period raises only at the lowerlimit constraints.
The idea of computing the dead storage was introduced by Kumar & Baliarsingh(2003) in order to make their dynamic programming based approach more effective.However, the working principle here is different. In the case of dynamic programming,the reservoir levels are usually discretised into n cells and the number of cells is always acompromise between the computational demand and accuracy. The dead storage rangeshrinks the capacity of reservoirs to the useful capacity, which means that smaller in-terval is discretised into the same number of cells. In this manner, the size of one celldecreases which results in a more accurate discretisation while the computational effortis the same.
59

Contrarily, in the case of genetic algorithms, the dead storage is used for constrainthandling and the underlying principle is to distinguish between the following individu-als:
1. which is infeasible only according to the original constraint system in period t = k
and2. which is infeasible according to the original constraint system in period t = k and
infeasible according to the relaxed constraint system at least one period before t < k.
The difference is that both individuals are infeasible, but for individual 2 this fact canbe predicted in a former time period, i.e. the constraint violation is encoded. Numericaltests will show that this method highly helps in finding feasible solutions during theoptimisation process.
Time dependent weighting factor - a scaling function for constraint violations
In the fitness function for infeasible individuals (49) the components of the dummyobjective vector are scaled by a scaling function sc(DNA(t), t). Here a polynomialscaling in time is used to emphasise the importance of feasibility in time:
sc(t) = (T +1− t)λ . (51)
Constraints at the beginning of the optimisation period are evaluated with higher em-phasis than others using relaxed weighting on the optimisation horizon. The most sig-nificant term is the first one having a scaling factor T λ while the less significant is thelast one (T th) using a scaling factor 1.
The operation of scaling is motivated by a dominant feature of least-cost optimisa-tion problems where the optimiser uses pre-defined water demand databases to provideintra–day scheduling. However, the difference between the model and real consumingcan be significant due the stochastic nature of water demand. Usually the model givessatisfactory prediction about the state of the system for the first couple of terms of theoptimisation period but if the difference exceeds ±5%, a new scheduling must be pro-vided based on the (measured) current state of the system. Thus, the first couple ofterms of the optimisation period have greater importance over others.
Besides, using empirical validation it is recognised that the scaling function en-hances the performance of metaheuristics on the presented search problem (Bene &Hos 2010).
60

Emphasising the time dependency of constraint violations leads to the scaling ofterms whereby the priority of feasibility is decreasing by time, that is, those solutionswhich do not violate constraints at the beginning of the optimisation period are superiorto others.
2.3 Tests
The developed solver is marked to solve problems on large scale, real systems. Hence,the tests on two real networks were performed. The water distribution system of Sopron(Appendix 1.2.1) was used for highlighting the advantages of the novel method becauseits size makes it possible to carry out a huge number of test runs. Then a case studyfollows on the waterworks of Budapest which shows the applicability of the methodeven for large systems.10
2.3.1 Performance measurements
The aim of this section is highlighting the statistical differences between the proposedtechnique (neutral search) and three widely used constraint handling approaches fromliterature, namely Penalty functions (Coello 2002, Eiben & Smith 2003), Powell–Skolnickmethod (Powell & Skolnick 1989), and Deb’s approach (Deb 2000) under the presentedconstraint handling methods.
Neutral search uses the fitness function (43) whose computation was detailed in theprevious section. Note that the computation of the fitness function does not require thedetermination of the objective function itself. However, it must be computed in orderto distinguish between two feasible individuals while selecting and transferring the bestindividuals into the external memory.
In the following, the differences in computation of fitness values of the investigatedapproaches are presented. The neutral search uses the neutral error function (45) whilethe other three approaches (Penalty, Powell–Skolnick and Deb’s methods) work withthe general error function (44) where β = 2 was chosen to calculate the errors. Theother difference is in the fitness function itself: the fitness function of the neutral searchis given in (43) while penalty function approach uses
f itness(DNA) =1
tc(DNA)− k · tv(DNA). (52)
10Budapest has ca. 1.7 millions of inhabitants.
61

where tc is the objective function (total cost), tv is the penalty function (49), and k isa constant used for making the equation dimensionally correct. Powell–Skolnick andDeb’s methods utilise
f itness(DNA) =
{1
tc(DNA) if feasible
−k · tv(DNA) otherwise.(53)
Each of the above mentioned 4 approaches were investigated under 4 different con-straint handling methods:
– Full. The dead-storage corridor was computed by (50) and the time scaling (51) wasused with the scaling factor λ = 1. (Preliminary studies suggested this value, seeBene & Hos 2010).
– Only dead storage. Only the dead storage corridor was determined and the timescaling function was not used. (λ = 0).
– Only time scaling. The original limits of the reservoirs were used instead of the deadstorage ranges. The time scaling was involved in the algorithm with λ = 1.
– Nothing. Neither the dead storage corridor nor the time scaling was used.
The four base approaches and the four different constraint handling levels determinealtogether 16 algorithms to be investigated. As test application, the water distributionsystem of Sopron (Appendix 1.2.1) with different initial water level constellations (Ta-ble 25) was used. Each of the 16 approaches was run 100 times on each of the 10initial water level constellations, which required 16,000 single runs. The numericalparameters of the test runs can be found in Table 4.
It was already pointed out in section (2.2.4) that a significant difference betweenthe predicted and the actual state of the water distribution system may evolve by timeexceeding ±5% state error tolerance. When the real state is far from the estimated one,a new optimisation must be performed for the next 24 hour using the actual state asinitial condition configuration. According to the best of our knowledge optimal pumppolicy calculation is required about 2-3 times per day on average in real life. Thisexplains the reason for day based pump scheduling.
The presented micro-GA was implemented in C++. The experiments were obtainedon a conventional PC (4 GB RAM, 3 GHz CPU) running on MS Windows. One singlerun took a computational time of 2 minutes.
62

Table 4. Micro–GA setup. (Selek et al. 2012, published by permission of Elsevier).
Parameter Name Value
External memory size 50
Micro population size 6
Number of exchanged individuals (memory → micro–population) 2
Number of exchanged individuals (micro–population → memory) 2
Number of random individuals in the micro–population 4
Probability of crossover 1.00
Probability of mutation 0.01
Mutation range (integer representation) ±1
Mutation range (floating point representation) ±0.005
Termination condition: (max. objective function evaluations) 12×106
Micro–cycle termination condition: (max. obj. function eval.) 100
Tournament size (Selection) 2
Table 5. Success rates [%].
Search Constraint handling
technique Full Only dead storage Only scaling Nothing
Neutral Search 96.90 74.90 31.60 35.30Penalty 92.70 84.70 93.60 83.60Powell’s method 94.50 85.30 92.40 83.30Deb’s approach 92.90 84.00 92.90 85.20
General comparisons
Tables 5-6 contain the corresponding statistics of the genetic algorithms, more tablesabout the median, minimum, maximum values, and confidence intervals can be foundin Appendix 2.1.
Table 5 shows that the developed neutral genetic algorithm with the full constraint(NGAF in the following) handling technique gives the best success rate after 12×106
individual evaluations. Although many other methods offer similar good values, table6 clearly confirms that the NGAF is the most effective in finding feasible solutions:the average number of evaluated individuals until the first feasible is found is only 289thousands while the second effective technique needed 462 thousands evaluations.
63

Table 6. Mean values. The bold values show the objective (cost) function values in e, andthe normal typeset values are the number of evaluations until the first feasible solution isfound, in 1000 evaluations.
Search Constraint handling
technique Full Only dead storage Only scaling Nothing
Neutral Search7217 7295 7313 7342289 841 1797 1469
Penalty7248 7293 7223 7294475 678 462 709
Powell’s method7240 7309 7235 7288469 643 510 624
Deb’s approach7262 7304 7237 7281462 660 493 582
The effect of the constraint handling is clear: it helps almost all the solvers achievea better success rate value and lower number of evaluations. Surprisingly, the neutralGA definitely needs the Full constraint system handling, without using the dead storagecorridor or time scaling, it produces the worst values compared to all the other cases.
The dynamics of finding feasible solution is depicted in Fig. 9. The lines of thedifferent methods do not cross each other, they perform more or less constant comparedto the others. Six groups can be easily determined which have similar results: the bestgroup is formed by the NGAF technique, followed by the second group which consistsof the Powell, Deb, and Penalty methods with Full or Only scaling type constraintconstraint handlings.
If we take a look at the objective values, the overview is not so clear. Althoughthe best is the NGAF approach again, the other techniques provide very similar results.The convergence diagrams are shown in Fig. 10, where there are only few intersections,otherwise the lines are running next to each other. The biggest gap between NGAF andother solvers is at ∼ 3 million evaluations while close to the end of the run the benefitremains but decreases significantly. The diagrams show some upper jumps, they existsbecause the mean value was always calculated as the average of the feasible runs. Thusthis average can jump a bit when a new feasible run with lower objective value appears.
Summarising the above discussed, the neutral search technique showed the best re-sults over the investigated test cases but if and only if the constraint handling techniqueinvolves the implementation of the dead storage corridor and the time-dependent scal-ing factor. For further statistical proves see the next section.
64

02
46
81
01
2
x 1
06
20
30
40
50
60
70
80
90
10
0
Ne
utr
al S
ea
rch
+ O
nly
sca
ling
Ne
utr
al S
ea
rch
+ N
oth
ing
Ne
utr
al S
ea
rch
+ O
nly
de
ad
sto
rag
e
Po
we
ll’s m
eth
od
+ N
oth
ing
Pe
na
lty +
No
thin
g
De
b’s
ap
pro
ach
+ O
nly
de
ad
sto
rag
e
Pe
na
lty +
On
ly d
ea
d s
tora
ge
De
b’s
ap
pro
ach
+ N
oth
ing
Po
we
ll’s m
eth
od
+ O
nly
de
ad
sto
rag
e
Po
we
ll’s m
eth
od
+ O
nly
sca
ling
Pe
na
lty +
Fu
ll
De
b’s
ap
pro
ach
+ F
ull
De
b’s
ap
pro
ach
+ O
nly
sca
ling
Pe
na
lty +
On
ly s
ca
ling
Po
we
ll’s m
eth
od
+ F
ull
Ne
utr
al S
ea
rch
+ F
ull
Ind
ivid
ua
l e
va
lua
tio
ns [
-]
Succes rate [%]
Fig
9.A
vera
geco
nver
genc
eof
the
feas
ibili
ty.
65

02
46
81
01
2
x 1
06
72
00
72
50
73
00
73
50
74
00
74
50
75
00
Ne
utr
al S
ea
rch
+ F
ull
Pe
na
lty +
On
ly s
ca
ling
Po
we
ll’s m
eth
od
+ O
nly
sca
ling
De
b’s
ap
pro
ach
+ O
nly
sca
ling
Po
we
ll’s m
eth
od
+ F
ull
Pe
na
lty +
Fu
ll
De
b’s
ap
pro
ach
+ F
ull
De
b’s
ap
pro
ach
+ N
oth
ing
Po
we
ll’s m
eth
od
+ N
oth
ing
Pe
na
lty +
On
ly d
ea
d s
tora
ge
Pe
na
lty +
No
thin
g
Ne
utr
al S
ea
rch
+ O
nly
de
ad
sto
rag
e
De
b’s
ap
pro
ach
+ O
nly
de
ad
sto
rag
e
Po
we
ll’s m
eth
od
+ O
nly
de
ad
sto
rag
e
Ne
utr
al S
ea
rch
+ O
nly
sca
ling
Ne
utr
al S
ea
rch
+ N
oth
ing
Ind
ivid
ua
l e
va
lua
tio
ns [
-]
Cost [€]
Fig
10.A
vera
geco
nver
genc
eof
the
cost
.
66

Fig. 11 shows the best achieved optimal pump policy obtained by evolutionarysearch for initial water level configuration 1. (See Table 25). The corresponding oper-ational cost is 6859 e. White and grey coloured areas mark the cheap and expensive
energy charging periods, respectively. The constraints, e.g. reservoir level-, pump flowrate limitations are represented by thin continuous lines. These results show that thepumps aim to lower the energy consumption during the expensive energy terms thusfeed the reservoirs when the energy tariff is lower. Reservoirs (3-7) follow this pattern:they are filled during cheap energy periods and bled during expensive ones. However,no similar observation can be taken for reservoirs (0-2). Since these storages are fedby the well pumps whose cost is not included in the objective function, the underlyingfeeding-draining dynamics may be the opposite. One may observe the well pump oper-ational restrictions as well: switching between pump operating points is allowed onlyat charging period boundaries.
Highlighting the differences between the base methods
The effects of the improved constraint handling (Section 2.2.4) was discussed in theprevious section, however, to distinguish between the neutral search technique and theother three approaches (Deb’s, Powell–Skolnick, and Penalty method) requires a moresophisticated comparison because of the small differences.
In the current example 100 successful trials on each initial condition configurationmean (at least) 100× 10 = 1000 samples per algorithm per measurement. However,the number of trials is usually higher than 1000 since 100% success rate has never beenachieved by any algorithm so far.
The scientific claims were formulated as follows: neutral search achieves perfor-mance improvement, i.e. it has better quality (smaller mean cost), it is faster (the meanof the fitness evaluations until a feasible solution is found is lower), and it has highersuccess rate than Penalty, Powell’s, and Deb’s method. Each algorithm run equippedwith its most effective constraint handling technique. Obviously, for the neutral geneticalgorithm the Full constraint handling technique was used. The other three techniqueswere used with Only time scaling constraint system because it performed better in pointof the objective values (Fig. 10) and provided nearly the same results in finding the firstfeasible solutions as the Full technique (Fig. 9).
These claims were formulated as statistical hypotheses. The null hypotheses H :δ j
i,neutral = 0 postulate that there is difference between neutral search and other methods
67

0 6 12 18 24
200
300
400
500
Wate
r le
vel [m
3]
Water Reservoir (0)
0 6 12 18 24
0
500
1000
Wate
r le
vel [m
3]
Water Reservoir (1)
0 6 12 18 24
1000
1500
2000
Wate
r le
vel [m
3]
Water Reservoir (2)
0 6 12 18 24
1000
1200
1400
1600
1800
Wate
r le
vel [m
3]
Water Reservoir (3)
0 6 12 18 24
2000
2500
3000
3500
Wate
r le
vel [m
3]
Water Reservoir (4)
0 6 12 18 24
3000
4000
5000W
ate
r le
vel [m
3]
Water Reservoir (5)
0 6 12 18 24
1000
1500
2000
Wate
r le
vel [m
3]
Water Reservoir (6)
0 6 12 18 24
600
800
1000
1200
Wate
r le
vel [m
3]
Water Reservoir (7)
0 6 12 18 24
0
150
360
Flo
w r
ate
[m
3/h
]
Pump (0)
0 6 12 18 24
0
110
Flo
w r
ate
[m
3/h
]
Pump (1)
0 6 12 18 24
0
270
500
Flo
w r
ate
[m
3/h
]
Pump (2)
0 6 12 18 24
0
550
Flo
w r
ate
[m
3/h
]
Pump (3)
0 6 12 18 24
0
66
116
Flo
w r
ate
[m
3/h
]
Pump (4)
0 6 12 18 24
0
66
118
148
Flo
w r
ate
[m
3/h
]
Pump (5)
0 6 12 18 24
0
90
114
Flo
w r
ate
[m
3/h
]
Pump (6)
0 6 12 18 24
0
72
130
Flo
w r
ate
[m
3/h
]
Pump (7)
0 6 12 18 240
100
200
Flo
w r
ate
[m
3/h
]
Well pump (0)
0 6 12 18 240
100
200
Flo
w r
ate
[m
3/h
]
Well pump (1)
0 6 12 18 240
200
400
Flo
w r
ate
[m
3/h
]
Well pump (2)
0 6 12 18 240
50
100
150
time [h]
Pow
er
[kW
]
Power Station (0)
0 6 12 18 240
5
10
time [h]
Pow
er
[kW
]
Power Station (1)
0 6 12 18 240
200
400
time [h]
Pow
er
[kW
]
Power Station (2)
0 6 12 18 240
20
40
60
time [h]
Pow
er
[kW
]
Power Station (3)
0 6 12 18 240
20
40
60
time [h]
Pow
er
[kW
]
Power Station (4)
Fig 11. Best pump schedule found by a genetic algorithm for initial level configuration 1.(Selek et al. 2012, published by permission of Elsevier).
68

while the alternative hypotheses J : δ ji,neutral > 0 say the opposite. Namely, neutral search
has better performance considering quality and speed, where δ ji,neutral = μ j
i −μ jneutral de-
notes the differences between the means of j = {cost,speed} distributions. In notation
Null hyphoteses H ji,neutral : δ j
i,neutral = 0
Alternative hyphoteses Ji,neutral : δ ji,neutral > 0,
where i = {Penalty,Powell,Deb}. Using the obtained large samples, each null hypoth-esis can be rejected (and alternative ones accepted) under the general one tailed z–testusing 5% significance level. The obtained results reveal that neutral method achievedbetter performance. However, the outcome of a z–test is highly influenced by the sam-ple size. The same null hypothesis can be rejected on a larger trial while accepted onsmaller ones. The question may arise whether the differences are real or just due tothe experimental error. In order to achieve a clear conclusion, a bootstrap method wasused to generate the graphs for observed significance levels to depict the dependence ofstatistical type–I error
α = Pr(wrongly reject H | H is true) (54)
on sample size. Additionally, the success rate and final best costs were compared aswell to have a clear view. In the preparation of this statistical comparison the bookof Bartz-Beielstein (2006) was followed, which includes the methodology of bootstrapand hypothesis testing for comparing evolutionary algorithms.
Fig. 12 depicts the observed significance levels where ns indicates the sample sizeand δobserved denotes the observed difference between detected means. It clarifies that onaverage neutral search achieves lower cost compared to other methods (Penalty functionmethod, Powell–Skolnick approach, Deb’s method) on the pump scheduling problem,however, statistically significant cost improvement can be observed at 10% significancelevel in larger samples only (ns > 365), e.g. when the operational costs are projectedto a longer horizon, typically a year or more. This result can be interpreted as follows.Let us consider when one implements daily pump policies for the detailed water net-work obtained by the competing methods each day for a year. Achieving better dailymean cost is unlikely by neutral search compared to other methods. However, the ob-served cost reduction is only 0.22% on average which is too small to be of interest in aparticular application.
Besides, remarkable speed improvement can be detected by applied neutrality. Us-ing the former considerations one can claim that neutral search utilises less objective
69

Fig 12. Observed significance levels for cost (left) and fitness evaluation (right) distributions.(The observed differences are highlighted in legends). These figures can be interpreted asfollows (focusing on Neutral search vs. Penalty method cost distribution comparison on thetop–left): using sample size 365 (ns = 365), if the true difference of the means is (a) δ = 0, (b)δ = 10 or (c) δ = 20, then (a) H : δ = 0, (b) H : δ = 10, or (c) H : δ = 20 null hypothesis is wronglyrejected in (a) 15%, (b) 45% and (c) 70% of the cases.
function evaluations than other methods on average to find a feasible candidate solution.Here the observed speed improvement was 57% on average.
Computations on the NEOS Server
In order to have an insight on the performance of stochastic optimisation techniques ver-sus deterministic approaches on the detailed problem, the optimisation task was solvedby 8 other deterministic optimisation methods for each initial water level configuration.These are multi-purpose, commercial solvers for linear mixed–integer problems andthey are freely available for research purposes through NEOS (2012).
Table 7 compares the results obtained by deterministic solvers with the best solu-tions found by the Genetic Algorithms. The cost distributions obtained by differentconstraint handling techniques were treated under one umbrella and only the best oper-
70

Table 7. Costs (e) obtained by the NEOS Solvers and Genetic Algorithm. Horizontal line ’-’indicates that no feasible solution was found until termination. (Best costs are highlightedby bold typeset). (Selek et al. 2012, published by permission of Elsevier).
Config. NEOS Solvers Best cost Meancost
number Cbc Glpk Gurobi MOSEK scip XpressMP by GA by NGA
1 7171 7090 6990 7334 7028 6987 6872 71642 7001 7007 6975 7250 7153 7086 6895 72073 6919 6961 6862 6933 6936 6859 6862 71504 7066 6991 6948 6898 6920 6930 6918 72095 7059 - 7379 7614 7280 7007 7062 73756 7011 - 6960 7382 7300 7378 7007 73017 7071 - 6889 70188 6959 6929 6878 72208 7084 6942 6928 7103 7217 6905 6927 71619 7210 7083 7005 7043 7057 7303 6927 718310 6999 7168 6952 7102 7000 7257 6923 7200Mean Cost 7059 7034 6989 7168 7085 7064 - 7217Success Rate [%] 100 70 100 100 100 100 - 96
ational costs are highlighted in the table, regardless of which constraint handling tech-nique achieved it. Here one aims to have an insight on the capabilities of the novelstochastic search versus general purpose optimisation solvers.
Table 7 illustrates remarkable peak performance achieved by genetic algorithm ver-sus deterministic approaches. Here, a stochastic solver may occasionally achieve betterresults than a deterministic method indicating the potential of the application of stochas-tic solvers on such optimisation tasks. The comparison confirms the fact that it is hardto obtain the global optima of the scheduling problem we face, even deterministic ap-proaches fail to reach it.
By comparing the mean performances, one can conclude that the mean operationalcosts obtained by the genetic algorithms are worse by 2.5% on average than in thedeterministic case. It must be emphasised again that the deterministic solvers were usedat their default settings thus the comparison above serves only illustrative purposes.
2.3.2 Case study: optimisation of the waterworks of Budapest
Here a case study on the water distribution system of the Hungarian capital, Budapest(Appendix 1.2.3) will be shown in order to demonstrate how effective the developedmethod is on the optimisation problem of large-scale waterworks. The waterworkssupply over 1.7 million domestic and several industrial consumers. The large size of
71

the network and the hilly terrain makes this WDS unique: cities with higher populationare usually located on flat regions or their water distribution system consists of moreseparate parts with their own water source.
Due to the request of the industrial partner, a coupled hydraulic simulation was per-formed which meant to solve a large-scale non-linear equation system for each timeperiod of each candidate solution, for details see Section 1.4. This increases the compu-tational demand of the algorithm drastically thus the program needs significant acceler-ation before it can be used, namely more orders of magnitude. The possible directionswere the following:
1. Better exploitation of the hardware resources.2. Reduction of the size of the hydraulic model.3. Development of a more efficient hydraulic solver.4. Development of a more efficient optimisation solver.
The first topic was easy to implement. Since the evaluations of the members ofthe same generations are independent in case of genetic algorithms, it can be easilyparallelised by using the Open MP package. The size of the population was four thusfour threads were evaluated simultaneously which naturally caused four times higherspeed with the assumption that the CPU has at least 4 cores. The other three topics arediscussed in details in the following subsections.
Modelling the hydraulic network
Since the original central zone contained more than 50 thousands of edges the hydraulicmodel needed a significant simplification. A simplifier algorithm converts the model filefor the hydraulic solver from the Piccolo file format used by the waterwork company.After neglecting the isolated nodes of the system, which built less than 0.1% of the total,the pipelines are sorted into two groups: the ones having at least 300 mm of diameter(BD-big diameter) and the rest (SD-small diameter).11 As a next step, the nodes areorganised in a very similar way: the nodes which are connected to at least one BD-pipe are marked as BD, the others as SD. Then the existing water consumptions in theSD nodes are added to the the nearest BD node with the help of a modified Dijkstra’salgorithm (Cormen et al. 2003). After this step the SD edges can be deleted. Note thatnot all the SD nodes can be neglected; some of them remain important due to human
11There are diameters from 50 mm to 1600 mm in the network.
72

decision, and these ones are excluded from the above described algorithm. Thereafterthe simplification of the remaining pipelines begins. If two pipes are connected inseries, the consumption of the middle node is divided in between the two remainingnodes proportionally to the distance from the deleted node. The pressure loss on anarbitrary pipe was modelled as follows:
Δp =8ρπ2 Cq2 where C =
λLD5 . (55)
The resulting coefficient Ce for the contracted case is
Ce =C1 +C2. (56)
In the case of simplifying two parallel pipes the coefficient is:
Ce =1(
1√C1
+ 1√C2
)2 . (57)
After using the algorithm described above, the network was reduced to 262 edges and216 nodes. The simplified network is shown in Fig. 44. Despite the simplifications, thehydraulic behaviour of the system remained realistic, and the computational demandwas decreased by 3 orders of magnitude.
Developing the hydraulic solver
The hydraulic equations of the water network is described by the non-linear algebraicequation system (1-2) which can be solved by the Newton-Raphson (NR) method. Eachstep of the iteration results in solving the following linear equation system:
JF(zn)(zn+1 − zn) =−f(zn), (58)
where zn is the nth approximation of the variable vector, which contains the pressuresin nodes and flow rates in edges, f stands for the non-linear equations and JF is theJacobi-matrix. The model consists of 262 edge equations and 216 node equations thusthe Jacobi-matrix has a size of 478× 478. Since the edge equations describe the rela-tionship between only 3 variables (2 pressures and 1 volume flow rate) and the nodeequations typically contain maximum 4 variables ( 4 flow rates), the Jacobi-matrix isextremely sparse, it contains 3 or 4 non-zero elements per row, independently of thesystem size. For exploiting this phenomenon, a sparse matrix solver (UMFPACK pack-age) was used which accelerated the computation speed by 3 orders of magnitude. The
73

convergence speed of the Newton-Raphson method highly depends on the initialisation.Since the evaluation of one single candidate solution requires performing 24 hydraulicsimulations, one can exploit that the states of the system in the nearby periods (hours)are usually similar. In that case, the initialisation is uncertain only in the first period, inthe later periods the initial values are derived from the solution of the periods before.The number of iterations was typically few hundreds in the first period, and few tens inthe latter periods in order to achieve relative errors less than 10-5, which required ap-proximately 0.1 s per schedule, i.e. for 24 hydraulic simulations on a standard desktopPC. Note that the current solution methodology of the non-linear equation system hasthe possibility of further developments. Almássy et al. (1981) and Halász et al. (2002)solved an equation system of a size of the number of independent loops in the networkwhile Todini & Pilati (1988) and Salgado et al. (1988b) presented a method where thenumber of the equations are equal to the number of branches. Their method is widelyapplied and popular, e.g. the commercial software EPANET (2012) uses this approach.
Developing the genetic algorithm
The computational cost of the hydraulic simulation was decreased heavily through sim-plifying the model and using a most efficient hydraulic solver. However, the geneticalgorithm usually needs 105 − 106 evaluations to find a ’good’ solution which entirelysatisfies the constraints and has a ’low’ total electrical cost. Satisfying the water vol-ume capacity limits in the reservoirs seems to be the highest challenge. In order to’help’ the genetic algorithm, a rule-of-thumb algorithm was implemented which helpskeep the reservoir levels in the prescribed range. If the algorithm observes that one ofthe reservoirs would be overfilled or discharged, then one of the biggest incoming pumpor outgoing pump is switched on, respectively. This change is also set in the DNA ofthe individual, which helps the algorithm find feasible solutions also in the latter gener-ations. The method is highly network-dependent and needs significant effort of tuning(i.e. figuring out which pump is the best to turn on if the limits would be violated) butit can accelerate the convergence heavily: in case of the network of Budapest 10-12thousands of evaluations were enough to reach a satisfying convergence.
74

Results
After implementing all the developments which were described in the previous section,the new algorithm provides a feasible solution within 2 hours and can decrease theobjective value with about 10% compared to the first feasible solution in 10 hours. Thealgorithm runs on a desktop PC equipped with an IntelCore i7 3.2 GHz CPU and 12GB RAM. Because of the computational time the algorithm cannot be used for real-time applications but it is suitable for analysing various typical test cases, e.g. drysummertime days when the water consumption is extremely high. Fig. 13 and 14 showthe results of one of these test cases. One can see that the hydraulic model works well(the measured operation points and the simulation values are close to each other).
Conclusions
This section presented a case study of solving the pump-schedule optimisation problemof a large-scale regional waterwork system, which is located in Budapest, Hungary. Be-cause of the characteristics of the unique network (1.7 million consumers, hilly terrain)the neutral genetic algorithm had to be further developed and notably accelerated: thehydraulic model was simplified by a modified Dijkstra’s algorithm, the hydraulic solverwas developed in order to exploit the special features of the coefficient matrix, and theneutral genetic algorithm was completed with a ’violent’ algorithm which helps keepthe water levels in the prescribed range. These developments caused more order ofmagnitudes of acceleration which made the problem computationally feasible.
2.4 Summary and criticism
In this chapter a genetic algorithm based optimisation method was introduced whichis able to optimise the pump schedule of real-size water distribution systems at anyhydraulic modelling level. The presented algorithm is the first application of a novelneutral genetic algorithm. The potential of the developed method was illustrated bycomparing it to other types of genetic algorithms and by performing a case-study on alarge-scale WDS.
The algorithm is able to handle variable speed pumps and fixed speed pumps as well.A novel constraint-handling technique was developed in order to increase the efficiencyof the algorithm. The method applies the technique which exploits the fact that the pre-
75

0 1 2 3 4 50
0.25
0.5
0.75
1
q [1000 m3/h]
P[M
W]
Békásmegyer
0 3 6 9 12 150
0.75
1.5
2.25
3
q [1000 m3/h]
P[M
W]
Káposztásmegyer IV
0 2 4 6 8 100
0.375
0.75
1.125
1.5
q [1000 m3/h]
P[M
W]
Káposztásmegyer I-II
0 0.6 1.2 1.8 2.4 30
0.25
0.5
0.75
1
q [1000 m3/h]
P[M
W]
Budaújlak
0 0.3 0.6 0.9 1.2 1.50
0.1
0.2
0.3
0.4
q [1000 m3/h]
P[M
W]
Radnóti
2 3.2 4.4 5.6 6.8 80.5
0.875
1.25
1.625
2
q [1000 m3/h]
P[M
W]
Csepel
0 1.2 2.4 3.6 4.8 60
0.05
0.1
0.15
0.2
q [1000 m3/h]
P[M
W]
Kőbánya UFA
0 0.6 1.2 1.8 2.4 30
0.25
0.5
q [1000 m3/h]
P[M
W]
Rákosszentmihály
0 0.6 1.2 1.8 2.4 30
0.1
0.2
0.3
0.4
q [1000 m3/h]
P[M
W]
Kőbánya KEPE
0 0.3 0.6 0.9 1.2 1.50
0.1
0.2
0.3
0.4
q [1000 m3/h]
P[M
W]
Gilice tér
0 0.8 1.6 2.4 3.2 40
0.375
0.75
1.125
1.5
q [1000 m3/h]
P[M
W]
Sas-Lipót
0 0.3 0.6 0.9 1.2 1.50
0.1
0.2
0.3
0.4
q [1000 m3/h]
P[M
W]
Vári
0 0.2 0.4 0.6 0.8 10
0.25
0.5
0.75
1
q [1000 m3/h]
P[M
W]
Diána
0 0.4 0.8 1.2 1.6 20
0.1
0.2
0.3
0.4
q [1000 m3/h]
P[M
W]
Budaörs
Fig 13. Comparison of the operation points of the pump groups. Circles are measured data,crosses are simulation data.
76

Fig 14. Water level variation in the reservoirs.
scribed minimum levels at the end of the day form restrictions for the former periodsas well; thus the search space can be decreased. This method is known from dynamicprogramming methods as dead storage corridor, but there the way of the effect is differ-ent. Another change in the algorithm is that the constraint violations of the reservoirswere scaled by the time periods. Thus, the pump schedules which cannot satisfy theconstraints in the former periods, get worse fitness values than other schedules, whichviolate the constraints only in the latter periods.
The developed algorithm was compared to genetic algorithms based on Penaltymethod, Deb’s approach, and Powell–Skolnick method. It was showed that the neutralgenetic algorithm is the most efficient method in point of objective values and findingfeasible solutions as well but if and only if the above prescribed constraint handlingtechnique is used. The novel algorithm was also compared to state-of-the-art solversof the NEOS server. The obtained results suggest that the genetic algorithm could bea good alternative of these methods in the case of water distribution management prob-lems. Finally, case studies of large-scale, real water distribution systems were presented:Sopron – 120 thousand consumers, Budapest – 1.7 million consumers.
77

The most significant advantage of the developed method is that it is able to solvescheduling problems of large-scale water distribution systems. It is insensible for non-linearities, therefore it is applicable also for complex optimisation problems, wherecoupled hydraulic simulations are needed to compute the operating points of the pumps.
The main drawback of the algorithm is that it does not handle the water demanduncertainties explicitly but rather it uses expected values instead, called as certainty
equivalent control in the literature (Bertsekas 2005). Industrial experiments showed,that this approximation provides good enough schedules which can be valid for thenext 6-8 hours but after that new optimisation is required in order to satisfy the reservoirconstraints. Taking into account the stochastic nature of the water demands could serveas basis of a more reliable and robust optimisation.
Another disadvantage is the computational requirement of the algorithm in case ofcoupled hydraulic simulations. A possible future research direction could be to accel-erate the hydraulic solver. Todini & Pilati (1988) and Salgado et al. (1988b) presenteda method where the number of the equations are equal to the number of branches.Although their method is widely applied and popular, e.g. the commercial softwareEPANET (2012) uses this approach, the last results were published in the late 80’s thusa possible research gap appears in this research field. Others (Rao & Alvarruiz 2007,Jamieson et al. 2007) substitute the hydraulic solver with neural networks.
Although the above mentioned difficulties exist and thorough parameter study wasnot performed on the algorithm, the executed tests showed the potential of the approach.
2.5 Contribution
I added two novel techniques to the algorithm presented in Selek (2009) that allow theoptimisation of pump schedules in the case of complex, real-size pipe networks.
– I developed a novel DNA representation to handle variable speed pumps and fixedspeed pumps simultaneously.
– I developed a novel constraint handling technique for improving the efficiency of thealgorithm. The approach is based on the equivalent transformation of the constraintsystem and uses a time-dependent scaling factor.
– I compared this algorithm to three standard, widely used genetic algorithms. It wasfound that the current approach finds the first feasible solution with 39% less com-putational time on average than the second best method. The obtained objective is
78

also statistically lower (the average difference is 0.1% compared to the second besttechnique).
The results were obtained by a joint research project with István Selek, Ph.D. Theoriginal version of the technique (the starting point of this research) can be found inPh.D. dissertation, see Selek (2009). Having said this, I emphasise that the above resultsare the outcomes of my own work.
Related articles: Bene & Hos (2006), Bene & Hos (2009), Bene et al. (2010), Hos& Bene (2010), Bene & Hos (2010), Selek et al. (2012), Bene et al. (2012a).
2.6 Tézis
A Selek (2009) hivatkozásban közölt neutrális genetikus algoritmust továbbfejlesztet-tem úgy, hogy képes legyen valós méretu és bonyolultságú csohálózatok szivattyú-üzemvitelének költség-optimalizációjára.
– Kidolgoztam egy olyan reprezentációt, mely lehetové teszi a folytonos térfogatáramú(frekvenciaváltóval felszerelt) szivattyúk kezelését is.
– Az algoritmus hatékonyságának növelése érdekében új mellékfeltétel-kezelési eljá-rást fejlesztettem ki, mely a mellékfeltétel-rendszer ekvivalens átalakításán és annakidobeli súlyozásán alapul.
– A kifejlesztett algoritmust összevetettem három, a szakirodalomban gyakran hivatko-zott genetikus algoritmussal. Megmutattam, hogy az általam kidolgozott módszer amellékfeltételeket kielégíto elso megoldást átlagosan 39%-kal kevesebb kiértékelésalatt találja meg, mint a második legjobb módszer. Az elért célfüggvény értékek isstatisztikailag bizonyítottan alacsonyabbak (és az átlagos eltérés a második legjobbmódszerhez képest 0,1%).
(A kapott eredmények Dr. Selek Istvánnal végzett közös kutatás eredményekéntszülettek, így azoknak egy korábbi verziója szerepel az o doktori értekezésében (Selek2009). A fenti altézisekben részletezett eredmények ugyanakkor saját munkám eredmé-nyei.)
Kapcsolódó publikációim: Bene & Hos (2006), Bene & Hos (2009), Bene et al.
(2010), Hos & Bene (2010), Bene & Hos (2010), Selek et al. (2012), Bene et al.
(2012a).
79

80

3 An exact dynamic programming method forfinding the global optimum of combinatorialpump scheduling problems
The aim of the presented work in this chapter is to develop a pump schedule optimisa-tion method which is able to provide the global optimum of moderate size combinato-rial pump-scheduling problems. The benefits of such an algorithm would be twofold: itcould be directly used for the operational control of small systems and it allows to usethese problems as benchmark problems for testing other algorithms.
Combinatorial problems mean that the pumps in the network have physically dis-crete operation points, i.e. the flow rates and the corresponding power consumptionscompose well determined pairs which are not affected by the current state of the sys-tem thus they can be determined a priori. (A more precise description will be given inSection 3.1.) This is a very common simplification in case of small scale waterworks,which usually supply few small villages, the problem group was formerly introduced inSection 1.4.2 as FDM, fully discretised model.
The basic concept of dynamic programming (Section 1.5.2) offers the global op-timum, however, the solving method usually requires the discretisation of state space,and if it is not discrete from its nature, the action space as well. These methods arecalled as discrete dynamic programming methods or DDP. The discretisation processcauses information loss which results in getting only near-optimal solutions. After all,the goal is to develop a novel dynamic programming method without this drawback.
Dynamic programming methods (DP) have long been recognised as a powerful toolby other researchers as well, however, it targets mainly continuous optimal control prob-lems in the field of operational optimisation of waterwork systems (Sabet & Helweg1985, Chandramouli & Raman 2001, Tilmant et al. 2002, Kumar & Baliarsingh 2003,Mousavi et al. 2004, Cervellera et al. 2006, Kumar et al. 2010, Darabos 1997). In thecontext of dynamic programming discrete pump models are rarely used, the literaturelacks the application of DP on combinatorial problems introduced by on/off type pumpsor/and valves implemented in a water distribution system. A rare example for solvinga small scale combinatorial problem can be found in a Hungarian course-book (Halász
81

et al. 2002), however, the presented approach does not guarantee to find the globaloptimum and it is computationally feasible only for small size problems.
To decrease this research gap here, the utilisation of dynamic programming on com-binatorial problems related to operational optimisation of water distribution networksis examined keeping in mind the above mentioned scientific aims as well.
The next section defines the combinatorial optimisation problem followed by a de-tailed literature overview on solving it via dynamic programming.
3.1 The problem to be solved
As it was mentioned above, the research in this section focuses on combinatorial opti-misation problems. In a wider sense, those water management problems belong to thisgroup whose immediate cost c and the state space change depend only on the currentcontrol u(t) and the time period(t), but never on the state space x(t):
x(t +1)−x(t) = f(u(t), t) (59)
c = c(u(t), t). (60)
Since the state space describes the water volumes of the reservoirs x(t) = v(t) andthe action space corresponds to the pump flow rates u(t) = q(t) (see Section 1.4.1), thestate evolution is an inflected form of the continuity equation (26):
x(t +1) = x(t)+Cpumpsu(t)Δt(t)−d(t), (61)
which clearly satisfies the above described requirement (59) while term (60) results ina simplified, forward chaining Bellman-equation (its general form is in (39)):
J(x(t +1), t +1) = minu(t)
[J(x(t), t)+ c(u(t), t)] . (62)
In a narrower sense, the combinatorial optimisation problem has all the above men-tioned properties and the control variables can be modelled as discrete variables, i.e. thepumps have discrete flow rate – power consumption pairs, and the length of the timeperiods is constant
Δt(t) = Δt. (63)
It will be shown later that this property can be exploited very effectively by the noveltechnique.
82

We look for the control sequence
UT−1 = [ u(0) u(1) . . . u(T −1) ], (64)
which clearly determines the free search space (Eiben & Ruttkay 1997). Our aim isto find the optimal sequence on this search space subject to the following constraints:water reservoir volumes (12), power station peak powers (19), well daily exploitationlimits (17), and well switching limitations (18). The last two constraints will be fulfilledby using the well flow rates as pre-defined, constant values.
3.2 Discrete dynamic programming difficulties
In general, DDP implements the ’pulling’ model (Jensen & Bard 2003) which requiresthe state space X to be quantised beforehand, that is, the state nodes must be generatedand stored prior to initiating the computations. When no information is available aboutthe form of the cost–to–go function J(x(t), t), each state variable is uniformly quantised(Castelletti et al. 2008). However, there are dozens of more efficient discretisationmethods available in the literature (Tang 1993, Niederreiter & Xing 1995, Georgia &Chen 1995, Niederreiter & Xing 1996, Chen 2002), which may even resolve the curse
of dimensionality, i.e. the exponential growth of the number of nodes in X subject tostate space dimension (Powell 2007), on specific problem classes (Rust 1997).
Due to quantisation the value of the cost–to–go function is calculated over a finiteset of node points, which requires inverted state dynamics to obtain controls u(t) as afunction of consecutive states x(t +1), x(t). However, in deterministic problems if thespace of the possible decisions is discrete, mostly no control action exists for state pairs{x(t), x(t+1)} on a finite grid, even for water systems with simple invertible dynamics,see top of Fig.15.
To overcome the difficulties, one may use a similar approach to LP-relaxation,which is a widely applied solution technique in integer programming (Matoušek &Gärtner 2007). Relaxation allows the decision variables to have any fractional valueon a given continuous set, usually on the interval [0,1]. First, an optimal solution isgenerated allowing each decision variable to be relaxed. Then, the relaxed values aresystematically eliminated from the suboptimal solution by recursively solving subprob-lems using linear programming methods (LP). This procedure was introduced by Land& Doig (1960) and it is well known as branch and bound or tree search implementing a
83

key idea of enumerating feasible solutions ’near’ to the relaxed optimal trajectory withthe hope that the optimal integer solution is found.
In the interpretation the linear programming must be replaced by dynamic program-ming to ensure the finding of global optimum at each stage. The high number of sub-problems to be solved until the feasible solution is found makes this approach cumber-some to employ for practical problems.
Another possibility is the use of DDP by parceling the state space, i.e. introducingstate cells by partitioning instead of state nodes by sampling. At this point, the problemcan be handled as Markov Decision Process (MDP, Ikonen et al. 2010) utilising thedistribution of states over partitions. Although the evolution of the system is determin-istic, the transition between partitions is assigned by probabilities: from one state cellmore possible target cells can be reached by a given control action depending on theposition of the initial state of the system x(t) within the state cell. The transition prob-ability matrix is simple to compute e.g. by Monte Carlo simulation, however, it mayconsume remarkable CPU time even for simple systems depending on partition density.The resulting MDP problem is then solved by stochastic dynamic programming and theobtained solution is back–tested on the original deterministic problem.
The partitions can be simply treated as sink cells by keeping only the best candidatesolution within a cell at time t, and all the others are removed causing remarkableinformation loss, as it is shown in the middle of Fig.15 (Halász et al. 2002). Besidesthat, the method is simple to implement, however, it usually obtains solution far fromglobal optimum when coarse discretisation is used. Like MDP approach, the findingof global optima is guaranteed by a sufficiently dense partitioning where the numberof partitions approaches to infinity, in which case the problems grow far beyond thecapabilities of digital hardware.
Another alternative to resolve the state space discretisation problem is the forwardgeneration of the state nodes on the optimisation time horizon simply by using the statetransition function (61) and feasible decision sequences. The method generates onlythose states that can be reached from a given initial state (or set of initial states) (Jensen& Bard 2003). The state generation as well as dynamic programming algorithm (cost–to–go recursion) involve substantial computation therefore their sequential applicationis computationally inefficient.
To overcome the computational difficulties a new dynamic programming approachis introduced.
84

3.3 The developed method
3.3.1 Dynamic programming in control domain
The essential idea of the proposed technique replaces the original state space and imple-ments discrete dynamic programming in a series of pseudo states considering symme-tries. The pseudo state variable is defined over the control domain where symmetriesare introduced by the invariance of the original state x to the permutations of a controlsequence. This concept is called as permutational invariance.
The control sequence until a given time instant τ is the following:
Uτ =
⎡⎢⎢⎣
u(0,0) u(1,0) · · · u(τ,0)u(0,1) u(1,1) · · · u(τ,1)
......
. . ....
u(0,m) u(1,m) · · · u(τ,m)
⎤⎥⎥⎦= [ u(0) u(1) · · · u(τ) ] =
⎡⎢⎢⎣
�μτ (0)�μτ (1)
...�μτ (m)
⎤⎥⎥⎦ , (65)
where m is the number of pumps, u(t) is the former introduced control vector and
�μτ( j) =[
u(0, j) u(1, j) · · · u(τ , j)]
(66)
is the control sequence of the jth pump. The Pτ( j) permutational set contains all thepossible permutations of the elements of �μτ( j)
Pτ( j) = perm(�μτ( j)). (67)
Let us assume that we have two control sequences U(a)τ and U(b)
τ whose pump se-quences share the same permutational sets:
∀ j ∈ Spump :
{�μτ
(a)( j) ∈ P∗τ ( j)
�μτ(b)( j) ∈ P∗
τ ( j).(68)
The above mentioned control sequences are permutationally symmetric. If all the per-mutationally symmetric control sequence pairs lead the system into the same state withassuming same initial state x(0):
x(a)(τ +1) = x(b)(τ +1) (69)
the underlying system is called permutationally invariant.
By using the integrator form of the system dynamics (61) with the simplificationthat the length of the time periods are constant:
x(t +1) = x(0)+t
∑τ=0
Cpumpu(τ)Δt −t
∑τ=0
d(τ) (70)
85

the commutative operations applied to the control vector sequence highlight the permu-tational invariance. In other words, the water volume of a reservoir at time t dependson the total delivered water (cumulative defined using the control variable) rather thanthe schedule itself. Note that this statement is true only for feasible controls, however,neglecting the infeasible controls can be implemented very easily in the algorithm, seeAlgorithm 1.
Using permutational symmetries, let us define the pseudo state
�ξ (t) =t
∑τ=0
u(τ)Δt (71)
denoting the total delivered water by time t. By substituting the pseudo state into (70)we obtain the dynamics
x(t +1) = x(0)+Cpump�ξ (t)−t
∑τ=0
d(τ) (72)
connecting the domains of the original x ∈ X and pseudo states �ξ ∈ Φ. In combinatorialproblems Φ is essentially discrete where the nodes are defined by the permutations ofthe control sequences. By recursively computing the iterative functional equation usingpseudo states
J(�ξ (t +1), t +1) = minu(t)
[J(�ξ (t), t)+ c(u(t), t)
](73)
the above defined water network optimal control problem can be solved achieving theglobal optimum. Here the forward iteration of (73) is preferred due to the setup of theoptimisation problem: besides the initial state x(0), at the end of the optimisation periodusually a set of the achievable states (target set) is given instead of a particular targetstate x(T ).
For the recursion of (73) the ’reaching’ dynamic programming model (Jensen &Bard 2003) is applied, which generates the states and determines the optimal decisionssimultaneously. As a great benefit, the handling of permutations and the forward recur-sion can be simply managed by using basic operations (insert, find, compare, etc.) onarrays. For better understanding, the pseudo code of the algorithm is given in Algorithm1.
Beside the simple implementation, the introduced approach solves the discretisa-tion problem of the state space as well. Through dynamics (72) the discrete pseudostate space simultaneously generates a grid on X . The nodes are introduced only on theachievable subset of the original state space at time t by a non-uniform discretisation.
86

Computer resources are not waisted by introducing nodes on X beforehand which cannot be reached at time t. For each introduced node on state space there is a correspond-ing control action which can be observed as a straightforward corollary of the definitionof the pseudo state variable. A comparison of the main known dynamic programmingmethods of combinatorial problems is given in Fig.15.
Algorithm 1 Pseudo code of the exact dynamic programming method based on theexploitation of permutational symmetries
set the initial pseudo statefor t = 1 to T do
for all pseudo state dofor all discrete control action of the pumps do
compute the new pseudo state �ξ ∗
if �ξ ∗ is feasible thencompute the cost of the new trajectory ending in �ξ ∗
if other old trajectory ending in �ξ ∗ exists thenif cost of the new trajectory < cost of the old trajectory then
overwrite the new step of trajectory in �ξ ∗
end ifelse
write the new step of trajectory in �ξ ∗
end ifend if
end forend for
end forchoose the best solution
3.3.2 Relaxed reservoir constraint system
Dead reservoir levels can form due to the fact that the reservoir level constraints areusually stricter at the end of the optimisation period (t = T ) than before (t < T ) resultinga ’sudden jump’ in constraint system (see Fig. 8). The idea of using it was introducedby Kumar & Baliarsingh (2003) in order to make their dynamic programming based
87

t
x(t)
minimum
maximum
00 1
t
x(t)
minimum
maximum
00 1 2 k k+1
t
x(t)
minimum
maximum
00 1 2 k k+1
Using inverted dynamics
Parceling the state space
Using permutational symmetries
nodes
nodes
cells
k k+1
xxx
x
xx
No feasible controlbetween the nodes!No feasible controlbetween the nodes!
Information loss by keepingonly the best trajectoryending in a cell!
Automatic discretizationNo cellsNo information loss!
Fig 15. Solution strategies in case of combinatorial pump scheduling problems, where apump group delivers the water to a reservoir and consumptions exist.
approach more effective. The proper algorithm for computing the dead storage corridorswas already shown in Section 2.2.4. It was also highlighted that the mode of action isdifferent when using it for genetic algorithms.
Dead storage limits were also computed for the current algorithm, and the workingprinciple is still different than Kumar & Baliarsingh (2003) suggested. They used thecorridor in order to narrow the reasonable useful capacity of the reservoirs, which re-sults in smaller intervals but they are discretised into the same number of cells. In thismanner, the size of one cell decreases, which results in a more accurate discretisationwhile the computational effort is the same.
Using the novel algorithms, the a priori discretisation of the reservoir is not needed,as it was described in the previous subsection. However, the use of the stricter reservoir
88

limits filters the solutions of the numerical grid more effectively: the solutions whichwould lead into infeasible nodes in the latter time periods can be selected sooner. Hencethe number of feasible nodes and the computational demand is decreasing, as it will beconfirmed later by the numerical results.
3.4 Tests
As a test-network, a small scale artificial Network called Small Sopron problem (Ap-pendix 1.1.1, with fixed well flow rate) was used, defined first by Bene et al. (2010),depicted in Fig. 16. There are dozens of deterministic and stochastic approaches whichcan reach or get close to the global optimum within seconds. For informative compari-son some of those were executed on the test network; results are summarised in Section3.4.3.
PowerStation
WaterReservoir (0)
WaterSource
WaterReservoir (1)
WaterReservoir (2)
Pump (0)
Pump (1)
Node (0)
Node (2)
Node (1)
WaterDemand (0)
WaterDemand (1)
Main distribution network Well field
fixed 330 m /h3
Fig 16. The Small Sopron problem with fixed well flow rate.
By implementing this small network, the obtained optimal control problem can beefficiently solved although its search space is still too large for complete enumeration(see section 1.4.3): it would take more than 150 years for the World’s fastest supercom-puter.
Note that there is no need for further test since the algorithm provides the globaloptimum.
89

3.4.1 Search space reduction
Using the introduced dynamic programming technique the size of the problem is highlyscaled down. Fig. 17 depicts the exponential growth of the problem size, i.e. the numberof possible solutions in time. Great reduction is achieved by exploiting permutationalsymmetries resulting 18 orders of magnitude at the end of the optimisation period. Theconstraint system further decreases the size of search space, obtaining it in enumerablesize at the 24th time step, which guarantees to find the global optimum.
0 4 8 12 16 20 2410
0
105
1010
1015
1020
1025
Time period [h]
Sea
rch
spac
e ca
rdin
ality
[−]
Reservoir discretization (100 cells for each)OriginalUnder permutational symmetries (PS)PS + original constraint systemPS + extended reservoir constraint system
Fig 17. Number of states for different ’discretisation’ methods. (Bene & Selek 2012, pub-lished by permission of Periodica Polytechnica CE).
The relaxed reservoir constraints usually appear at the end of the optimisation hori-zon where the dead storage forms. In contrast to the original constraint system, it resultsin an additional reduction of 1–2 order of magnitudes, which is a significant achieve-ment even in this simple case. Note that the size of the dead storage depends on theinitial condition.
Moreover, the size of the pseudo state space Φ grows in time unlike the state spaceX . For comparison, consider that the state space is uniformly quantised using 100 cellson each dimension (i.e. on each reservoir volume), which is assumed as a sufficientdiscretisation scale.
90

3.4.2 Problem solving in the pseudo state space
The implementation of the reservoir constraints (12) in pseudo state space is accom-plished by using the state space evolution (72)
vmin(t +1)−x(0)+T
∑τ=0
d(τ)≤ Cpumps�ξ (t)≤ vmax(t +1)−x(0)+T
∑τ=0
d(τ), (74)
where the left- and right-hand side of (74) can be pre–calculated at the beginning ofthe optimisation process.
In this particular example, the reservoir constraint system represents a ’cube’ inthe 3 dimensional state space X which is transformed into a polygon lying within the2 dimensional pseudo state space Φ. This polygon is formed by a rectangle whoseedges represent the minimum and maximum limits of Reservoirs (0) and (2), which areconnected only to one pump (Pump(0) and Pump(1), respectively). The corners thatare cut off by the constraints on Reservoir(1) appear as 45 degrees rotated cutting edgesin Φ, see Figs. 18 and 19. This particular reservoir is affected by two pumps: thesigned sum of the delivered water by pump 0 and 1 located within the main distributionnetwork.
The power station constraint handling is managed simply by eliminating the candi-date solution from inventory which does not satisfy (19). Fig. 18 shows the optimaltrajectory and constraint system over the pseudo state space.
Using a constraint system ’slice’ in pseudo space at time period 23 the shape ofthe cost–to–go function is shown in Fig. 19. It is interesting to note that the cost–to–gofunction is rugged regardless of energy price peaks although the objective function (114)implements a smooth, quadratic formula. Ruggedness appears due to the combinatorialnature of the problem, namely the finite control set.
3.4.3 Numerical results and comparisons
The introduced method was implemented under C++ and executed on a computer equippedwith Intel Core 2 Duo T6600 CPU (2.2 GHz) without parallelisation. The achieved op-timal cost was 5830 e, which is obviously better than the best solution found by thegenetic algorithm (5865 e, minimum of 100 tries with the same algorithm in Chapter 2)or by a conventional DP approach (6170 e, Ikonen et al. 2010). The optimisation pro-
91

Fig 18. Optimal trajectory on the pseudo state space. The grey shaded polygons expressthe evolution of reservoir constraints in time. The projection of the trajectory can be seen onthe marginal planes. (Bene & Selek 2012, published by permission of Periodica PolytechnicaCE).
cess consumed about 0.02-0.03 second CPU time, the corresponding optimal scheduleis shown in Fig. 20.
Finally, a comparison is given in Table 8 summarising the obtained results of differ-ent optimisation approaches. The table targets to give information on how the solversrespond to the constraint system. The investigation serves only informative purposes;all the tested solvers were used with their default setup-parameters. As the capacity of awater reservoir becomes narrower, the number of the feasible solutions approaches zero.Stricter constraint system enhances the performance of DP because less nodes must beconsidered while it introduces challenges for other solvers. To implement this, threedifferent optimisation problems were introduced beyond the original task by decreasingthe useful capacity of Reservoir 0. These setups were then solved by world-leader gen-eral purpose optimisation methods as well, which are freely available on the internet atNEOS (2012).
3.5 Summary and criticism
In this chapter a novel dynamic programming based algorithm was presented which pro-vides the exact optimum of combinatorial water network scheduling problems. Combi-
92

Fig 19. Cost–to–go function at time period 23, approaching the last time instance (end ofthe optimisation horizon). Top: the original problem. Bottom: the energy tariff is uniform (1e/kWh on the optimisation horizon). Due to finite control action sets the shape of the cost–to–go function is rugged (regardless of energy pricing) even though the objective functionis a smooth, quadratic formula. (Bene & Selek 2012, published by permission of PeriodicaPolytechnica CE).
natorial network means in the practice that the pumps have discrete operational pointsor they can be modelled as discrete, and the water consumptions are considered de-terministic. The method exploits the so-called permutational invariances of the pumpschedule.
It was shown that the water delivered by the pumps in the certain time periods canbe permutated in such a way that the state of the network, namely the reservoir levelswill be the same at the end of the investigated time horizon (assuming the same initialstate and exactly 1 reservoir belongs to 1 pressure zone). In other words, the state ofthe system is invariant to the permutations of the delivered amounts of water.
Then, the optimisation problem can be solved in finite number of steps by using thedelivered water of the pumps as state variable of a dynamic programming. The method
93

0 6 12 18 240
200
400
time [h]
Flo
w r
ate
[m
3/h
]
Well pump (0)
0 6 12 18 24
0
100
420
time [h]
Flo
w r
ate
[m
3/h
]
Pump (0)
0 6 12 18 24
0
320
550
time [h]
Flo
w r
ate
[m
3/h
]
Pump (1)
0 6 12 18 240
100
200
300
time [h]
Energ
y [kW
h]
Power Station (0)
0 6 12 18 24
500
1000
1500
2000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (0)
0 6 12 18 24
1000
2000
3000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (1)
0 6 12 18 24
500
1000
1500
2000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (2)
Fig 20. Optimal schedule: 5830 e. Peak charging periods (2 e/kWh) are grey shaded whileoff–peak periods (1 e/kWh) are colourless. Thin lines represent constraints. (Bene & Selek2012, published by permission of Periodica Polytechnica CE).
Table 8. Comparison of the optimal solutions found by the NEOS solvers and the proposedDP technique on different test problems (nf. = feasible solution not found). T (Bene & Selek2012, published by permission of Periodica Polytechnica CE).
vmin(0..23,0) vmin(24,0) Cost, NEOS solvers [e] Cost [e]
[m3] [m3] Cbc Glpk Gurobi MOSEK scip XpressMP DP
100 1600 5830 5920 6215 5940 5975 5830 58301000 1600 5940 6005 5940 6120 5975 5920 59201600 1600 6370 6170 6370 6395 6135 6140 61151700 1700 nf. nf. nf. nf. nf. nf. nf.
does not need the a priori discretisation of the state space and gives the global optimum.The condition of the method is that the operation points of the pumps are physicallydiscrete or discretised values. It was also presented that the search space can be furtherdecreased by filtering the solutions by the constraints thus the computational demandof the algorithm is diminished.
The developed algorithm finds the global optimum of pump scheduling problems ifthe mentioned conditions are true (combinatorial problems, deterministically modelledwater consumptions) without any further restrictions for the constraint system and theelectricity tariff. The approach solves the curse of dimensionality (Powell 2007) on thestate space by exploiting the phenomenon of permutational invariance and using theintroduced pseudo state space instead of the original state space. However, the curse ofdimensionality on the action space still remains a significant drawback thus the methodis restricted to small and moderate sized networks.
94

The presented approach still has benefits in spite of the above mentioned restrictions.Once, it is a powerful tool for obtaining the global optima of medium size benchmarkproblems. Furthermore, it is directly applicable for the on-line pump scheduling oflocal waterwork systems on hilly terrain. These systems usually have the followingcharacteristics: there are only FSPs in the network, the operation points are determinedby the geodetic heights, and the network contains only 3-4 pump stations.
3.6 Contribution
I developed a dynamic programming based optimisation algorithm for finding the globaloptimum of combinatorial pump schedule problems (i.e., the pumps have discrete, fixedoperating points, and exactly one reservoir is connected to each pressure zone).
– I showed about combinatorial water networks that a schedule of a pump can be per-muted without changing the resulting state of the system, independently from theelectric tariff and the power peak limitations. This phenomenon is called permuta-tional invariance.
– I developed an approach that exploits the permutational invariance. As a result, thediscretisation of the state space is performed automatically without any informationloss thus the algorithm provides the global optimum.
Related publication: Bene & Selek (2012).
3.7 Tézis
Kidolgoztam egy dinamikus programozáson alapuló szivattyú-üzemvitel optimalizálóalgoritmust, mely olyan közepes méretu hálózatok esetén, ahol egy nyomászónáhozpontosan egy ellennyomó medence csatlakozik, és a szivattyú munkapontok elore is-mert, diszkrét értékekként modellezhetok, képes kiszámítani a globális költség-optimu-mot.
– Megmutattam, hogy az ilyen vízellátó hálózatokban a szivattyú menetrendek szaba-don permutálhatók anélkül, hogy a rendszer végso állapota megváltozna, függetlenüla tarifarendszertol és a lekötött teljesítmény korlátoktól. Ezt a jelenséget permutációsinvarianciának neveztem el.
95

– A permutációs invarianciát kihasználva egy olyan módszert alkottam meg, ahol amedenceszintek diszkretizálása automatikusan és információveszteség nélkül meg-történik, így a módszer globális optimumot ad.
Kapcsolódó publikációm: Bene & Selek (2012).
96

4 An approximate dynamic programmingtechnique for solving a wide range of pumpscheduling problems
The previous chapter introduced a dynamic programming approach which providesthe global optimum of certain pump schedule optimisation problems. This algorithmwas interesting from scientific point of view, however, the direct application for realnetworks is restricted to small and medium scale water network systems, which canbe modelled as combinatorial problems (the flow rate – consumed power pairs of thepumps are discrete values).
Chapter 2 described a genetic algorithm which is able to provide near-optimal solu-tions for various types of water distribution system problems. The scientific aim of thischapter is to investigate the possibilities of using dynamic programming approaches forthis purpose. The benefit of the new techniques would reside in its higher reliability,remember that even the best genetic algorithm found in Chapter 2 provided only about96% of success rate.
If one wants to solve the above mentioned problem by dynamic programming meth-ods, approximations must be performed. The present chapter introduces an approxi-mate dynamic programming approach which is based on the spatial decomposition ofthe network and aggregation technique in order to decrease the state space and makethe algorithm computationally feasible.
In the context of water systems, an aggregation method was first proposed by Hall(1970) and applied to multireservoir power systems. In Hall (1970) the whole networkwas aggregated into a single virtual reservoir unit, which is often called as equivalentreservoir, and the problem was solved by dynamic programming. The technique of stateaggregation has been utilized by several researchers for the optimal control of water dis-tribution networks (Joalland & Cohen 1980). It is also often combined with spatial de-composition at large-scale hydropower systems (Turgeon 1981, Archibald et al. 1997).The key idea is to perform aggregation in state space by adding the potential energy ofthe reservoirs together. Today it is understood that the state aggregation approaches en-counter the problem that the state aggregation introduces information loss therefore the
97

local constraints on reservoirs can not be taken into account and the obtained solutionmay not be feasible, see Turgeon (1981).
4.1 Discretisation of variable speed pumps
This approach cannot be considered as a new method but it can serve as a good basisfor latter comparisons. The idea is simple and well-known: since DDP methods workon discrete action space, the flow rates of the variable speed pumps must be discretised.The proper balance between computational accuracy and computational demand highlydepends on the applied discretisation level as it was highlighted in Section 1.5.2. De-spite of this, the technique is plausible in cases where the network consists mainly offixed speed pumps and there are only few variable pumps in the system. The advan-tage of the method is that it does not require any further restrictions for the networkmodelling.
4.1.1 Illustrative example
The Small Sopron problem (described in Appendix 1.1.1) was solved with the discreti-sation of the variable speed pump; the well pump control set configurations were as fol-lows: {0, 165, 330, 500}[m3/h], {0, 165, 330, 415, 500}[m3/h], {0, 110, 220, 330, 415,500}[m3/h], {0, 80, 160, 245, 330, 415, 500}[m3/h], {0, 55, 110, ..., 440; 500}[m3/h],{0, 30, 60, ..., 480; 500}[m3/h], {0, 10, 20, ..., 500}[m3/h] obtaining 4, 5, 6, 7, 10, 18,and 51 nodes on well pump operating range.
The following constraints are taken into account: water reservoir volume limita-tions (12), power station peak powers (19), well daily exploitation limits (17), and wellswitching limitations (18).
The solving method is the same dynamic programming method, which was intro-duced in Chapter 3, the only difference is that there the flow rate of the well pump wasfixed but here it is part of the control vector. The well switching limitations (18) wereimplemented by simply neglecting the trajectories which do not fulfil them: these con-straints are checked first when a new step is added to a trajectory because it requiresonly a comparison which is computationally the cheapest. The daily exploitation limit(17) is checked in the last period.
The method was tested on the same sample problems as it was already introducedin Chapter 3: the feasible range of the 0th reservoir was set to different values. Table 9
98

summarises the results. The conclusion is obvious: a stricter constraint system requiresfiner discretisation on the well pump operational range to get closer to the global opti-mum. The finer the discretisation is, the more flexible the operation of the well becomes.In this particular example representing the well pump control set by 18 control actionsseemed satisfactory. It can also be clearly seen that even a low level discretisation withfive gridpoints resulted in better results than the flow rate of the variable speed pump isfixed (Table 8).
Table 9. Comparison of the optimal solutions using different discretisation levels. The bestsolutions are typeset in bold numbers. (Bene & Selek 2012, published by permission ofPeriodica Polytechnica CE).
vmin(0..23,0) vmin(24,0) Cost [e], DP (Discretisation level below.) [e]
[m3] [m3] 4 5 6 7 10 18 51
100 1600 5755 5755 5755 5755 5755 5755 57551000 1600 5920 5810 5810 5810 5810 5810 58101600 1600 6115 6030 5920 5920 5920 5920 59201700 1700 failed 6295 6245 6245 6245 6085 6085
4.2 Splitting the model into subsystems
Section 1.4.2 introduced several typical modelling levels of water distribution systems.One of them is the case when the variable speed pumps deliver water from the watersources to the system and the other pumps are usually fixed speed pumps, referred toas VWM earlier. The aim in this section is to present a novel technique which canexploit the properties of modelling type VWM of waterworks in order to achieve good,near-optimal results while decreasing the computational demand.
In Halász et al. (2002) and Kullmann (1999) a spatial decomposition technique isintroduced. In their work, the well fields which consists of the wells and the next reser-voir (see Figs. 39, 41 and 42), were removed from the system, and only the remainingdistribution system was optimised first. Then they had the pump schedule of all thepumps which connect the main distribution system to the well fields. Using these pumpschedules as water consumptions of the well fields, they can be optimised separately.
99

The main drawback of this method is that feasible solution for the well fields do notalways exist since the schedule of the outgoing pump is already fixed.
4.2.1 The developed method
The basic idea of the novel method is splitting the network into smaller units in orderto reduce the state and the action space of the solvable sub-models compared to theoriginal one. The remaining sub-models are the main distribution system and the wellfields as shown in Figs. 39, 41 and 42; each well field consists of the well itself, the firstreservoir after the well, and the variable speed pump which delivers the water betweenthem.
Despite the same decomposition method which was used in Halász et al. (2002) andKullmann (1999), the algorithm works differently: it solves the optimisation tasks of themain distribution system and the well fields step-by-step together, simultaneously. Thecore of the algorithm could be any kind of dynamic programming approach: a standarddynamic programming technique which was described in Section 1.5.2 or the newlydeveloped algorithm which works on the pseudo state space, mentioned in Chapter 3.The difference is that the core algorithm works only on the main distribution system:the constraints derived from the well fields, namely the daily exploitation limits(17), theswitching limitations (18), and the corresponding well reservoir limits are not consid-ered in the first step. In contrast, the trajectories, which do not satisfy constraints of thereservoir of the main distribution system (12) or power (19) limits are removed.
Then, the constraints of the well field are checked in an embedded subroutine asfollows. For each well field a linear programming problem can be defined in period t
which consists of t +1 linear equations: ∀τ ∈ {0,1, ..., t}
vmin(τ , i)≤ v(0, i)−τ
∑ε=0
q(ε , j)+τ
∑ε=0
q(ε ,k)≤ vmax(τ , i), (75)
where i is the index of the well reservoir, j denotes the outgoing pump of the well
reservoir whose schedule is known thusτ∑
ε=0q(ε , j) is a known number and k stands
for the well pump. (75) is a linear equation system for q(τ , j), which represents thereservoir limitation constraints of the well reservoirs through the continuity equation(26). The consumptions are not present in the equation because they are very raredirectly after the well pumps, however, they can be involved if necessary without furtherrestrictions.
100

In most real-life cases the LP problem stands without any objective function due tothe fact that the power consumption of the well pumps can be neglected compared to thewhole system, see VWM model in Section 1.4.2. However, a linear objective function(the power consumption – flow rate function of the well pump) can be involved withoutany modification on the algorithm. Fig. 21 illustrates that the error of this assumptionis about 5%, which is lower than the measurement uncertainty.
The equation system can be easily completed with the daily exploitation limit con-straint (17) in the last period t = T −1:
vwellmin (k)≤
T−1
∑t=0
q(t,k)≤ vwellmax(k). (76)
Finally, the switching limitation constraints (18) must be taken into account whichallow switching the flow rates of the wells only a few times a day. Let these timeinstances be 2 a.m., 9 a.m. and 7 p.m. Then instead of using the constraint new variablesmust be introduced as follows.
q(:,k) = { z0 z0 z1 z1 z1 z1 z1 z1 z1 z2 z2 z2
z2 z2 z2 z2 z2 z2 z2 z3 z3 z3 z3 z3 }, (77)
where z0 is a fixed, initial flow rate. As an illustrative example, the linear equationsystem to be solved for period t = 4 is given as follows
vmin(0, i)≤ v(0, i) −0∑
ε=0q(ε , j)+ z0 ≤ vmax(0, i)
vmin(1, i)≤ v(0, i) −1∑
ε=0q(ε , j)+2z0 ≤ vmax(1, i)
vmin(2, i)≤ v(0, i) −2∑
ε=0q(ε , j)+2z0 + z1 ≤ vmax(2, i) (78)
vmin(3, i)≤ v(0, i) −3∑
ε=0q(ε , j)+2z0 +2z1 ≤ vmax(3, i)
vmin(4, i)≤ v(0, i) −4∑
ε=0q(ε , j)+2z0 +3z1 ≤ vmax(4, i).
If the above detailed equation system does not have any objective function, onlythe feasibility must be checked thus it is sufficient to run only the first phase of a two-phased simplex method. In other cases both phases must be performed. For the LPcomputations, the GNU Linear Programming Kit (GLPK 2012) was used. The pseudocode of the whole method is given in Algorithm 2.
101

0 0.1 0.2 0.3 0.40
20
40
60
80
100
120
q [m3/h]
H [
m],
η[%
], P
[W]
pipe head
pump head
pump efficiency
pump power
operating points
theoretical curve
0.1 0.15 0.2 0.25 0.3 0.350
5
10
15
20
25
30
35
q [m3/h]
P[W
], r
ela
tive
err
or
[%]
theoretical curve
fitted curve
relative error
0 0.1 0.2 0.3 0.40
20
40
60
80
100
120
q [m3/h]
H [
m],
η[%
], P
[W]
pipe head
pump head
pump efficiency
pump power
operating points
theoretical curve
0.1 0.15 0.2 0.25 0.3 0.350
5
10
15
20
25
30
35
q [m3/h]
P[W
], r
ela
tive
err
or
[%]
theoretical curve
fitted curve
relative error
Fig 21. The error of the power modelling when the power consumption–flow rate functionis considered as a linear function. The set revolution numbers of the pump are 85%, 92.5%,100%, 107.5%, and 115%. The nature of the pipe (or system) curve does not have a signifi-cant effect.
102

Algorithm 2 Pseudo code of the approximate dynamic program which split the probleminto subproblems
set the initial statefor t = 1 to T do
for all state of the main distribution system (MDS) dofor all possible control action of the MDS do
compute the new state of the MDSif the MDS is feasible then
solve all LP-subproblems which describe the well fields (WF)if all WF is feasible then
...check the cost and write the new solution if necessary...
end ifend if
end forend for
end forchoose the best solution
The main advantage of the algorithm is obvious: the search space of the algorithmwas significantly decreased because the well pumps and the connected reservoirs are notpart of the main system model any more, they can be handled as separate LP-problems.Since LP-problems can be solved routinely and fast, the computational demand of thedeveloped technique is lower.
The disadvantage of the method compared to the exact dynamic method presentedin Chapter 3 is that it cannot guarantee the global optimum because the equation system(75,78) to be solved ’looks back’ for all former periods t ∈ {0,1, ..., t} which clearly vio-lates the basic concept of dynamic programming where the new state and the feasibility
depends only on the previous state and the actual time and action.The developed well-handling method is referred to as DP-LP from now on.
103

Table 10. Comparison of the optimal solutions found by DP and DP-LP. The best solutionis typeset in bold numbers. (Bene & Selek 2012, published by permission of Periodica Poly-technica CE).
vmin(0..23,0)vmin(24,0) Cost [e], DP (Discretisation level below.) Cost [e]
[m3] [m3] 4 5 6 7 10 18 51 DP-LP
100 1600 5755 5755 5755 5755 5755 5755 5755 57551000 1600 5920 5810 5810 5810 5810 5810 5810 58101600 1600 6115 6030 5920 5920 5920 5920 5920 59201700 1700 failed 6295 6245 6245 6245 6085 6085 6085
Table 11. Comparison of the optimal solutions found by the NEOS solvers and DP-LP. Thebest solution is typeset in bold numbers. (Bene & Selek 2012, published by permission ofPeriodica Polytechnica CE).
vmin(0..23,0) vmin(24,0) Cost, NEOS solvers [e] Cost [e]
[m3] [m3] Cbc Glpk Gurobi MOSEK scip XpressMP DP-LP
100 1600 5830 6025 5830 5940 5755 5830 57551000 1600 5940 6190 5810 5940 6130 6100 58101600 1600 6210 6245 6085 6250 6085 5975 59201700 1700 6470 6520 6085 6305 6085 6085 6085
4.2.2 Tests
Performance tests
As a first test, the small Sopron problem was chosen which was already solved bydiscretisation of the well pump. Table 10 summarises the results. One can observe thatthe novel DP-LP method obtained the attainable optimum on each problem instances.
In contrast, Table 11 shows the achieved best solutions by NEOS solvers comparedto DP-LP. However, the DP-LP method does not ensure the finding of the global op-timum, it provides the best solutions on this particular problem. Finally, the optimalschedule corresponding to the original problem (Table 11 first row) can be seen in Fig.22.
The comparison of the obtained optimal control policies of different well handlingsetups (Fig. 22 and 20) highlight the fact that greater operational flexibility on wellfields allows better cost reduction.
104

0 6 12 18 240
200
400
time [h]
Flo
w r
ate
[m
3/h
]Well pump (0)
0 6 12 18 24
0
100
420
time [h]
Flo
w r
ate
[m
3/h
]
Pump (0)
0 6 12 18 24
0
320
550
time [h]
Flo
w r
ate
[m
3/h
]
Pump (1)
0 6 12 18 240
100
200
300
time [h]
Energ
y [kW
h]
Power Station (0)
0 6 12 18 24
500
1000
1500
2000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (0)
0 6 12 18 24
1000
2000
3000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (1)
0 6 12 18 24
500
1000
1500
2000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (2)
Fig 22. Optimal schedule gained by the DP-LP on the Small Sopron network: 5755 e. Peakcharging periods (2 e/kWh) are grey shaded while off–peak periods (1 e/kWh) are colorless.Thin lines represent constraints. (Bene & Selek 2012, published by permission of PeriodicaPolytechnica CE).
Case study: Waterworks of Szokolya
For further illustration the presented DP-LP method was applied also for a real waterdistribution system. The WDS of the villages Királyrét, Szokolya and Kóspallag is atypical moderate-sized network on hilly terrain. Although the network supplies only3400 consumers besides hotels and other tourist destinations, the capacity of the reser-voirs are also very small thus even finding a feasible solution is highly challenging. Theone-day long optimisation horizon is divided into 48 × 0.5 hour long periods in orderto extend the freedom of the algorithm.
The presented DP-LP algorithm provided 7760eas the optimal cost, the correspond-ing schedule is depicted in Fig. 23. Two runs were performed using the original exactdynamic algorithm by the discretisation of the wells: in the first case the flow ratewas discretised into {0,20, ...,80}[m3/h] and a result of 7906ewas obtained while inthe second the discretisation was {0,10, ...,80}[m3/h] and resulted in 7760eas optimalcost. The NEOS solvers Cbc, Glpk, Gurobi, MOSEK, scip, and XpressMP providedthe following optimal costs, respectively: 7874e, failed, 7872e, 7812e, failed, and7760e.
One can conclude that that the DP-LP algorithm performed well also in this partic-ular, real-life example: there was no other algorithm which provided a better objective.
105

0 6 12 18 240
20
40
60
80
Time [h]
Flo
w r
ate
[m
3/h
]
Well pump (0)
0 6 12 18 24
0
109
Time [h]
Flo
w r
ate
[m
3/h
]
Pump (0)
0 6 12 18 24
0
95
Time [h]
Flo
w r
ate
[m
3/h
]
Pump (1)
0 6 12 18 24
0
30
62
Time [h]
Flo
w r
ate
[m
3/h
]
Pump (2)
0 6 12 18 24
0
29
Time [h]
Flo
w r
ate
[m
3/h
]
Pump (3)
0 6 12 18 240
20
40
Time [h]
Energ
y [kW
h]
Power Station
0 6 12 18 24100
150
200
250
Time [h]
Wate
r volu
me [m
3]
Water Reservoir (0)
0 6 12 18 24
120
140
160
180
Time [h]
Wate
r volu
me [m
3]
Water Reservoir (1)
0 6 12 18 24
350
400
450
Time [h]
Wate
r volu
me [m
3]
Water Reservoir (2)
0 6 12 18 24
250
300
350
Time [h]
Wate
r volu
me [m
3]
Water Reservoir (3)
0 6 12 18 24
250
300
350
Time [h]
Wate
r volu
me [m
3]
Water Reservoir (4)
Fig 23. Optimal schedule gained by the DP-LP on the Szokolya network. Peak charging peri-ods are grey shaded while off–peak periods are colorless. Thin lines represent constraints.
4.3 Selection of the key reservoirs
Although the above introduced well-handling method decreases the search space signifi-cantly, it is not satisfying for solving the pump scheduling problems of medium or largescale networks such as the waterworks of Sopron (App 1.2.1). A new technique willbe introduced, which applies the novel well-handling as well but uses a different algo-rithm for solving the problem of the main distribution system instead of doing dynamicprogramming in the pseudo state space.
In the context of water distribution system, aggregation techniques are very popular.The idea of aggregation is to construct a simpler, more traceable problem based onreducing the number of states combining them together (Bertsekas 2005). However,this introduces information loss therefore the local constraints of the reservoirs cannotbe taken into account and the obtained solution may be feasible (Turgeon 1981).
4.3.1 The developed method
The idea is to diminish the state space to only a small number of reservoirs, whichare called as key reservoirs. E.g. if we choose 2 key reservoirs in the system, which
106

seemed to be a good compromise between computational accuracy and demand, theycan be indexed with k0 and k1:
x(t) = [v(t,k1) v(t,k2)]. (79)
The action space remains the same which allows computing the actual volume of all thereservoirs in order to check the constraints which overcome the difficulty of aggregationtechniques mentioned before. However, only two reservoirs are used for making acomputational grid for the dynamic programming. The pseudo code of the algorithm isgiven in Algorithm 3.
Algorithm 3 Pseudo code of the approximate dynamic program which uses the keyreservoirs for generating the state space
set the initial statefor t = 1 to T do
for all state built from the key reservoirs (KR) dofor all possible control action of the main distribution system (MDS) do
compute the new state of the KRif the MDS is feasible then
solve all LP-subproblems which describe the well fields (WF)if all WF is feasible then
...check the cost and write the new solution if necessary...
end ifend if
end forend for
end forchoose the best solution
For a better understanding of the benefits, let us make a short computation about thedimensions of the space and action space of the full Sopron network (Appendix1.2.1).The whole system consists of 8 reservoirs, 8 discrete pumps in the main distributionsystem, and 3 variable speed well pumps (Fig. 41). Hence, the size of the original
107

action space of the pumps12 is 486 000 and the size of the state space13 is 107. It isobvious that these values make the problem computationally infeasible. Even usingdynamic programming in the control domain does not help because the dimension ofthe control space is also high. As a benefit of computing the constraints of the well fieldsseparately, the state space dimension reduces to 5, while the size of the state space isonly 105 at the same discretisation level and the size of the action space decreases to3888. Using only 2 key reservoirs to describe the state of the system, the state spacesize is only r2 where r is the number of cells within one reservoir.
However, selecting the key reservoirs is a challenging task: one must ensure thatthey can describe the state of the whole system sufficiently accurately in order to achievegood solutions. Let us have a look at Fig. 41 and we can observe that the waterworkof Sopron consists of two bigger parts. Reservoirs 0-3 and pumps 0-2 gather the waterfrom the wells while reservoirs 4-7 and pumps 4-7 supply the consumers with water.Pump 3 connects these two parts and reservoirs 3 and 4 are on its suction and pressuresides, which suggests selecting them as key reservoirs.
The above described method is highly network-dependent. A more sophisticatedapproach for selecting the key reservoirs can be as suggested in the following. Eachpossible reservoir pair (7+6+5+4+3+2+1=28) must be run on several test problems; inour case they can be formed by the different initial level scenarios, see Table 25. Fig.24 shows the average objective values of the test runs. The results showed that theselection of reservoirs 3 and 4 was reasonable, however, the pairs 2-4, 3-7, and 4-7provided similarly low-cost solutions.
Finally, it must be mentioned that the dead storage corridor was also used as Kumar& Baliarsingh (2003) suggested. The dead storage range narrows the reasonable usefulcapacity of the reservoirs, which means that smaller interval is discretised into the samenumber of cells. In this manner, the size of one cell decreases which results in a moreaccurate discretisation while the computational effort is the same.
12Assuming that the flow rates of the well pumps are discretised into 5 gridpoints.13With the poor discretisation where each reservoir volume is divided into 10 cells.
108

1 2 3 4 5 6 7
0
1
2
3
4
5
6
7700 €
8000 €
8400 €
8700 €
Key reservoir k0
Key r
eserv
oir
k1
Fig 24. Average objective values in case of the discretisation of two reservoirs. The di-ameters of the circles are proportional to the objective values. Reservoirs 3 and 4 seemreasonable to be selected as key reservoirs. (Bene et al. 2013, published by permission ofIWA Publishing).
4.3.2 Test results
Performance measurements
As mentioned before, 10 different test-cases were defined for the Sopron network,which differ in the initial water volumes of the reservoirs; the objective function wasthe total cost. Each of the key reservoirs was discretised into 50 cells, which was foundto be a good compromise between the computer demand and the quality of the solu-tions. These test cases were already solved by the neutral genetic algorithm and someNEOS solvers, see Chapter 2. The ADP and the GA approach were run on a worksta-tion equipped with Intel Core i7-2600 CPU @ 3.4 GHz CPU and 8 GB RAM, for thecomputations only one single core was used.
A single computation took 2 minutes for the GA, 25 seconds for the ADP, and lessthan one second for the NEOS solvers. Note that the parameters of the NEOS serversare unknown. Table 12 summarises the results.
As the table shows, the objective values obtained by the ADP and the GA are nearlythe same and 3.5% higher than the best of the NEOS solvers. The solution of the ADP
109

Table 12. Costs (e) obtained by the NEOS Solvers, the neutral genetic algorithm and thepresented approximate dynamic programming approach. (Best costs are highlighted bybold typeset). (Bene et al. 2013, published by permission of IWA Publishing).
Config. number NEOS Solvers Meancost
Cost
Cbc Glpk Gurobi MOSEK scip XpressMP by NGA by ADP
1 7171 7090 6990 7334 7028 6987 7164 71862 7001 7007 6975 7250 7153 7086 7207 72433 6919 6961 6862 6933 6936 6859 7150 72264 7066 6991 6948 6898 6920 6930 7209 71475 7059 - 7379 7614 7280 7007 7375 73866 7011 - 6960 7382 7300 7378 7301 72957 7071 - 6889 7018 6959 6929 7220 71318 7084 6942 6928 7103 7217 6905 7161 72529 7210 7083 7005 7043 7057 7303 7183 716910 6999 7168 6952 7102 7000 7257 7200 7355Mean Cost 7059 7034 6989 7168 7085 7064 7217 7239Success Rate [%] 100 70 100 100 100 100 96 100
has the advantage of satisfying the whole constraint system in every single run whilethe GA fails in 4% of the cases. It is also clearly seen that there was no ’superior’ solverwhich would have provided the best solution in every case.
Real life use
The presented ADP method was set-up on the server machine of the waterworks ofSopron for daily use. Although the algorithm performs well, human operators foundthe switching number of the pumps still high, see Fig.25. After changing the objectivefunction to the switching number, another schedule was obtained which is depicted inFig. 26. The effect is obvious: in the first case the total cost was 7186 ewhile theswitching number 72 while in the second case the values were 8555 eand 29 switches.(Both belong to test case 1.) The linear combination of these quantities as the objectivefunction is also possible and does not need any modification in the program code.
110

0 6 12 18 24
0
100
200
300
time [h]
Flo
w r
ate
[m
3/h
] Well pump (0): 3000 m3
0 6 12 18 24
0
100
200
300
time [h]
Flo
w r
ate
[m
3/h
] Well pump (1): 1400 m3
0 6 12 18 24
0
200
400
time [h]
Flo
w r
ate
[m
3/h
] Well pump (2): 5230 m3
0 6 12 18 240
150
360
time [h]
Flo
w r
ate
[m
3/h
] Pump (0)
0 6 12 18 240
110
time [h]
Flo
w r
ate
[m
3/h
] Pump (1)
0 6 12 18 240
270
500
time [h]
Flo
w r
ate
[m
3/h
] Pump (2)
0 6 12 18 240
550
time [h]F
low
rate
[m
3/h
] Pump (3)
0 6 12 18 240
66
116
time [h]
Flo
w r
ate
[m
3/h
] Pump (4)
0 6 12 18 240
66
118148
time [h]
Flo
w r
ate
[m
3/h
] Pump (5)
0 6 12 18 240
90114
time [h]
Flo
w r
ate
[m
3/h
] Pump (6)
0 6 12 18 240
72
130
time [h]
Flo
w r
ate
[m
3/h
] Pump (7)
0 6 12 18 240
100
time [h]
Energ
y [kW
h] Power Station (0)
0 6 12 18 240
5
10
time [h]
Energ
y [kW
h] Power Station (1)
0 6 12 18 240
500
time [h]
Energ
y [kW
h] Power Station (2)
0 6 12 18 240
50
time [h]
Energ
y [kW
h] Power Station (3)
0 6 12 18 240
50
time [h]
Energ
y [kW
h] Power Station (4)
0 6 12 18 24200
400
time [h]
Wate
r volu
me [m
3]
Water Reservoir (0)
0 6 12 18 240
500
1000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (1)
0 6 12 18 241000
1500
2000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (2)
0 6 12 18 24
10001200140016001800
time [h]
Wate
r volu
me [m
3]
Water Reservoir (3)
0 6 12 18 24
2000250030003500
time [h]
Wate
r volu
me [m
3]
Water Reservoir (4)
0 6 12 18 24
3000
4000
5000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (5)
0 6 12 18 24
1000
1500
2000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (6)
0 6 12 18 24600
800
1000
1200
time [h]
Wate
r volu
me [m
3]
Water Reservoir (7)
Fig 25. Optimal pump schedule obtained by the ADP. Objective: total cost. The expensivetariff hours have grey background-colour. (Bene et al. 2013, published by permission of IWAPublishing).
111

0 6 12 18 24
0
100
200
300
time [h]
Flo
w r
ate
[m
3/h
] Well pump (0): 3130 m3
0 6 12 18 24
0
100
200
300
time [h]
Flo
w r
ate
[m
3/h
] Well pump (1): 2610 m3
0 6 12 18 24
0
200
400
time [h]
Flo
w r
ate
[m
3/h
] Well pump (2): 6040 m3
0 6 12 18 240
150
360
time [h]
Flo
w r
ate
[m
3/h
] Pump (0)
0 6 12 18 240
110
time [h]
Flo
w r
ate
[m
3/h
] Pump (1)
0 6 12 18 240
270
500
time [h]
Flo
w r
ate
[m
3/h
] Pump (2)
0 6 12 18 240
550
time [h]
Flo
w r
ate
[m
3/h
] Pump (3)
0 6 12 18 240
66
116
time [h]
Flo
w r
ate
[m
3/h
] Pump (4)
0 6 12 18 240
66
118148
time [h]
Flo
w r
ate
[m
3/h
] Pump (5)
0 6 12 18 240
90114
time [h]
Flo
w r
ate
[m
3/h
] Pump (6)
0 6 12 18 240
72
130
time [h]
Flo
w r
ate
[m
3/h
] Pump (7)
0 6 12 18 240
100
time [h]
Energ
y [kW
h] Power Station (0)
0 6 12 18 240
5
10
time [h]
Energ
y [kW
h] Power Station (1)
0 6 12 18 240
500
time [h]
Energ
y [kW
h] Power Station (2)
0 6 12 18 240
50
time [h]
Energ
y [kW
h] Power Station (3)
0 6 12 18 240
50
time [h]
Energ
y [kW
h] Power Station (4)
0 6 12 18 24200
400
time [h]
Wate
r volu
me [m
3]
Water Reservoir (0)
0 6 12 18 240
500
1000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (1)
0 6 12 18 241000
1500
2000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (2)
0 6 12 18 24
10001200140016001800
time [h]
Wate
r volu
me [m
3]
Water Reservoir (3)
0 6 12 18 24
2000250030003500
time [h]
Wate
r volu
me [m
3]
Water Reservoir (4)
0 6 12 18 24
3000
4000
5000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (5)
0 6 12 18 24
1000
1500
2000
time [h]
Wate
r volu
me [m
3]
Water Reservoir (6)
0 6 12 18 24600
800
1000
1200
time [h]
Wate
r volu
me [m
3]
Water Reservoir (7)
Fig 26. Optimal pump schedule obtained by the ADP. Objective: number of pump switches.(Bene et al. 2013, published by permission of IWA Publishing).
112

4.4 Summary and criticism
In the present chapter an approximate dynamic programming technique was introduced,which is able to solve the optimisation problems of real-sized water networks while as-suming deterministic consumptions. The base of the method is splitting the networkinto well source fields and the main distribution network. The dimension of the statespace of the main distribution system was further decreased by exploiting the phe-nomenon that the state of the network can be described with a low number of reservoirswhile the gained control remains still near-optimal. The effectiveness of the developedmethod was illustrated by comparing it to state-of-the-art optimisation methods.
In the case of large-scale systems, the search space must be significantly decreasedin order to solve the problem in finite time by dynamic programming. If the well pumps,which deliver water from the sources to the network, are equipped with a frequencyinverter and their energy consumption is negligible compared to the other pumps or thelinear function of the flow rate, then they can be separately handled as a simple linearprogramming problem by separating them from the main network with the connectedreservoir together. The sizes of the remaining problems are significantly smaller. If thevariable speed pumps cannot be modelled as it was written above, the only solution isto discretise the flow rate of the pumps. It works in every circumstances but it obviouslyincreases the action space of the system. Of course, a mixture of the above mentionedtechniques is also possible: the well-pumps can be handled as separate LP problems (ifthe conditions are satisfied) and the other variable speed pumps can be discretised.
The remaining size of the main distribution system can be still too high after split-ting out the well fields. The possibilities of using only the volumes of a few reservoirsas state variables were investigated. While creating the numerical grid for the dynamicprogramming only these reservoirs are used and only the fulfilling of the constraints arechecked for the other reservoirs.
Using this mentioned idea for the waterworks of Sopron, the experience suggestselecting 2 reservoirs as key reservoirs which is a good compromise between the com-putational demand and accuracy. Every possible pair was run on several test problemswhich helped choose the most efficient pairs. The results obtained by the implementedalgorithm were compared to the solvers of the NEOS which illustrated the effectivenessof the new method. By comparing the results to those ones that obtained by the neutralgenetic algorithm (Chapter 2), one can determine that the objective values are nearly
113

the same and on the other hand the success rate was increased to 100% and runningtime was reduced to the 1/5.
If we move towards other systems, the solver applied for the main distribution net-work can be chosen as follows. Combinatorial systems with smaller action space canbe solved by the exact dynamic programming method, which was first introduced inChapter 3, which does not require the a priori discretisation of the state space and pro-vides the global optimum. For bigger networks, a ’traditional’ dynamic programmingapproach was introduced, which requires the discretisation of the state space, but de-creases its dimensions significantly by only using a small number of key reservoirs forgenerating the computational grid.
This chapter did not show any solutions where coupled hydraulic simulation isneeded, however, the use of the key reservoirs in order to decrease the state space doesnot have any restrictions for the model thus it could also be used for this purpose. Thedisadvantageous effect which would certainly arise is the slowing down of the wholeoptimisation process. (As it was seen in Section 2.3.2 before.)
It also has to be mentioned that to cope with the stochastic nature of the waterconsumptions, the entire way of modelling has to be reconsidered. Stochastic dynamicprogramming (SDP, Stedinger et al. 1984, Cervellera et al. 2006) is a popular approachin the field of multi-reservoir system operation thus it can serve as a good basis for theoptimisation of potable water distribution systems as well. Fore more information seeSection 6.3 for the future research directions.
4.5 Contribution
I developed a novel dynamic programming based algorithm which provides near-optimalsolutions for pump schedule optimisation problems for complex, real size networks.
– The method handles the well fields, consisting of the well pumps and their pres-sure side reservoirs, as independent, but coupled linear programming problems. Themethod provided better (or equivalent) results on the test cases than the investigatedsoftwares of the NEOS (2012) server.
– I developed a novel method in order to decrease the search space. The state spaceis composed of the water volumes of the few most important reservoirs, called key-
reservoirs. However, the volume limitations of the rest of the water distribution sys-tem are also checked. I showed two possibilities for choosing the key-reservoirs.
114

– I illustrated the operation of the new method through a real-life example (the citySopron) and compared the results to the ones obtained by the genetic algorithm men-tioned in Contribution 2.5. The objective values were found to be 0.3% worse whilethe computational time was decreased by 80% and the success rate of the new methodis 100%.
Related publications: Bene et al. (2013), Bene et al. (2012b), Bene & Selek (2012).
4.6 Tézis
Kidolgoztam egy olyan dinamikus programozás alapú eljárást, mely képes valós méretués bonyolultságú csohálózatok esetén a szivattyú-üzemvitel optimalizációs problémákközelíto megoldására.
– A módszer a kútszivattyúkból és a hozzájuk kapcsolt nyomómedencékbol álló víz-bázisokra felírható mellékfeltételeket kapcsolt lineáris problémaként kezeli. A mód-szer a tesztfeladatokon rendre jobb (vagy azonos) eredményeket szolgáltatott, mint aNEOS (2012) szerver vizsgált megoldói.
– A keresési tér további csökkentése érdekében kifejlesztettem egy módszert, mely ahálózat állapotterét csak néhány, a hálózat szempontjából jelentos, ún. kulcsmedencepillanatnyi víztérfogatával írja le, a többi medence csak a mellékfeltételek ellenorzé-sénél kap szerepet. Megmutattam két lehetoséget a kulcsmedencék kiválasztására.
– Egy valós vízellátó-hálózat (Sopron) vizsgálatán keresztül bemutattam a módszermuködését. Az algoritmus által adott eredményeket összevetve a saját genetikus al-goritmus eredményeivel megállapítható, hogy a célfüggvény értékek átlagosan 0,3%-kal rosszabbak, azonban a megoldásra fordított ido 80%-kal kevesebb és az algorit-mus sikerességi rátája 100%.
Kapcsolódó publikációim: Bene et al. (2013), Bene et al. (2012b), Bene & Selek(2012).
115

116

5 Minimising the specific energy consumptionin order to achieve the energy optimum ofsystem fed by a variable speed pump
As the energy consumed by the pumps constitutes the major energy consumption ofhydraulic systems, there is an increasing demand in the industry to employ efficientpump control techniques. One possibility of setting the operating point in a smoothand economical way is to change the revolution number with the help of a frequencyconverter and use the well-known affinity laws (see e.g. Mays 1999, Halász et al. 2002).Nowadays, due to their advantages, variable speed pumps are often installed into sys-tems with significant storage capacity. In such cases, the efficiency of the frequencyinverter and of the electric motor are also to be taken into account as in Rishel (2001)and Bernier & Bourret (1999), who also examined the differences between the so calledwire-to-water efficiency and the pump efficiency.
There are numerous scientific works dealing with the problem of pump-scheduleoptimisation of water distribution systems as it was shown in Section 1.5. When deal-ing with real-life pump schedule optimisation problems, the following two challengesarise. Firstly, the solution techniques mostly rely on approximate methods (e.g. softcomputing or approximate dynamic programming) because of the complexity of pumpschedule optimisation problems (heavily constrained, non-convex, non-linear problems)therefore it is not known how ’close’ the actual solution is to the global optimum. Sec-ondly, even in the case of pump scheduling problems of moderate-size systems, it isusually not straightforward to give a transparent explanation to the industrial users howthe computed schedule saves energy. Thus, the aim of this chapter is twofold: on onehand, it provides a minimalist example of pump scheduling, which can be appropriateas a benchmark problem as the optimum can be computed in a semi-analytical way.On the other hand, due to the simplicity of the problem, the results can be interpretedand explained easily thus it can serve as a tutorial example to understand the optimal-ity of more complicated pump schedules. Moreover, I believe that due to its relativesimplicity, the presented method is directly applicable in the case of simple industrialsystems.
117

The chapter presents a simple and straightforward technique to solve the daily pumpschedule energy optimisation problem in the case of a single variable speed pump feed-ing a reservoir in the presence of consumption, at the highest modelling level, withcoupled steady state hydraulics (FHM) as it was written in Section 1.4.2. (For tran-sient hydraulic modelling, see Chaudhry 1987 and Wylie et al. 1993.) Although thehydraulic network is highly simplified and artificial performance curves are used, thepresented technique is directly applicable for real-life hydraulic systems of the sametopology. The technique is based on keeping the specific energy consumption of thepump as low as possible and uses easy-to-implement control policy.
The present chapter is organised as follows: after the first section, which gives abrief overview on the energy optimisation of pump schedules, the idea of minimisingthe specific energy consumption is presented. In the next section a simple, synthetic,yet realistic hydraulic system is presented together with its performance curves. Thenthe reservoir filling problem is discussed, i.e. the task is conveying a given amount offluid to a reservoir in arbitrary time with minimal energy consumption. Three levels ofcomplexity are investigated:
– infinitely large reservoir,– reservoir with finite surface, and– the previous case with consumptions.
Then general energy optimisation over a finite time horizon is presented. A numeri-cal illustration to the optimality of the presented technique is also given: the resultsare compared to the solutions of a simple, but high resolution dynamic programmingmethod.
Since this chapter uses several new, dimensionless variables, a separate nomencla-ture can be found in Tables 13 - 14.
118

Table 13. Dimensional and dimensionless variables.
Quantity Physical Dimensionless
Revolution number n ν = nnref
Head H h = hHref.max.
Volume flow rate Q q = QQref.max.
Efficiency η e = ηηref.max.
Specific energy consumption F f = Fρg
ηref.max.Href.max.
Static head A α = AHref.max.
Friction coefficient B β = B Q2ref.max.
Href.max.
Consumption flow rate C ϕ = cQref.max.
Average consumption flow rate φ
Surface of the reservoir S γ = SH2
ref.max.
Time t τ = t Qref.max.H3
ref.max.
Power P
Electric work W
Density ρ
Gravity acceleration g
Volume of fluid V
Table 14. Subscripts.
Explanation Abbreviation
Beginning (start) b
End (target) e
119

5.1 Motivation for using the specific energy consumption asobjective function
The base idea of this chapter was born in the laboratory of the Department of Hydro-dynamic Systems, Budapest University of Technology and Economics, Hungary. Asimple pump measurement device was used to record the characteristic curves of a cen-trifugal pump: the flow rate, total head difference, torque, and revolution number wasstored. The measurement setup is not discussed in details here because the measuredvalues and the plots gave only the idea of the new results.
The efficiency of the pump can be computed as the ratio of the outlet and inletpowers:
η =Pout
Pin=
QHρgMω
, (80)
where Q denotes the flow rate, H the total head difference, ρ the density of the waterand g is the gravitational acceleration while M stand for the torque of the shaft and ωfor the angular velocity. The H(q) and η(q) curves can be recorded by setting differentpositions of a throttle valve at a given revolution number. Other H(q) and η(q) curvesbelong to other revolution numbers, as it can be seen in Fig.27. Note that fitted curvesare depicted instead of the measurement points.
0 1 2 3 40
2
4
6
8
10
12
Q [dm3/s]
H [m
], η
[10%
]
η=0.38
η=0.36
η=0.34
H(Q) pumpη(Q) pumpH(Q) networkη = constant
Fig 27. Iso-efficiency lines over the H −Q space (shell diagram) and the best efficiency pointfor a given system curve. (Revolution numbers: 795, 1141, 1360, 1550 RPM.)
120

The picture also shows the iso-efficiency lines over the H−Q space, which is calledas shell-diagram in other languages (e.g. Muscheldiagramm in German: Bohl 1994,Raabe 1970 or kagylódiagram in Hungarian: Fuzy 1991) because of its shape. If thepump works against a given system whose H(Q) curve is also known, the best efficiencypoint is exactly where one of the iso-efficient lines, i.e. one of the shells is tangent tothe curve of the system.
Let us introduce the specific energy consumption (Wallbom-Carlson 1998, Máttyus1987) which measures the energy needed for conveying a given amount of fluid:
F =Ein
V=
Pin
Q=
Pout
ηQ=
QHρgηQ
= ρgHη. (81)
The idea behind using the specific energy consumption (SEC in the following) isthat its minimisation expresses very clearly the economical aim of the waterworks. Inthe numerator the quantity is proportional to the electrical cost and the denominator isproportional to the money which is on the water bill. Thus the specific energy consump-tion is basically the ratio of the outcomes and incomes of the waterworks.
Fig. 28 depicts the F(Q) at different revolution numbers, and also the iso-linescan be constructed over the H–Q space. At the lowest possible value of the energyconsumption, one of the isolines of SEC is tangent to the H(Q) curve of the system.
We can see that the flow rate of the best efficiency point and the lowest SEC pointare clearly different. Let us define a simple task, where the aim is to convey a givenamount of fluid at the lowest energy consumption, e.g. V = 10dm3. For the length ofthe filling period we obtain
tBEP = 10[dm3]1.95[dm3/s] = 5.13[s] (82)
tLSEP = 10[dm3]1.15[dm3/s] = 8.96[s], (83)
where BEP denotes the best efficiency point and LSEP means the lowest specific energyconsumption point. The total energy used for delivering the water at the BEP is
EBEP =ρgHV
η=
1000[kg/m3]9.81[m/s2]6.5[m]10−2[m3]
0.36= 1.77[kJ] (84)
while in the case of the LSEP:
EBEP = FV = 1.6×105[J/m3]10−2[m3] = 1.60[kJ]. (85)
The conclusion is simple: if the time of conveying a given amount of fluid is notrestricted then minimising the SEC gives lower total energy values than maximising the
121

0 1 2 3 40
2
4
6
8
10
12
Q [dm3/s]
H [m
], F
[105 J
/m3 ]
F=2.2×105 J/m3
F=1.9×105 J/m3
F=1.6×105 J/m3
H(Q) pumpF(Q) pumpH(Q) networkF = constant
Fig 28. Isolines of the specific energy consumption (SEC) over the H −Q space and thelowest SEC point for a given system curve. (Revolution numbers: 795, 1141, 1360, 1550RPM.)
efficiency of the pump. The reason for it is that the SEC takes into account the loss ofthe system through the required head as well while the efficiency is determined by onlythe loss of the pumps.
5.2 The simplified hydraulic system
In this section the simple hydraulic system under analysis is introduced, depicted in Fig.29. The system consists of an unlimited water source, a pump, a pipe network modelledby a concentrated loss, an upper reservoir, and a node into which the consumption isconcentrated. To ease the calculations, qualitatively proper but artificial performancecurves will be used. However, the presented calculations are straightforward to adoptto real-life pump performance curves. The concept of specific energy representing theenergy need for conveying a unit volume of fluid (kWh/m3) is revised as it plays acentral role henceforth.
The following assumptions and simplifications are made: the delivered fluid is in-compressible, the thermal phenomena are negligible and only the efficiency of the pumpis considered instead of the wire-to-water efficiency (Rishel 2001). The electric tariffis considered to be constant during the day. Simple pump performance curves will beused, which are qualitatively proper but give the possibility of performing exact mathe-
122

Waterreservoir
Watersource
Node
ConsumptionPipe
network
Pumpα
Fig 29. Network topology. (Bene & Hos 2012, published by permission of ASCE).
matical calculations. The physical and dimensionless variables are summarised in Table13.
5.2.1 Dimensionless pump performance curves
Let us assume that the performance curve of a pump is known at an nref referencerevolution number in the form
Href.(Qref.) = Href.max.
[1−
(Qref.
Qref.max.
)2]. (86)
It should be emphasised again that altough the above formula is highly simplified andis only qualitatively similar to real pump performance curves, the technique we shalldevelop is also suitable for real-life pumps. Due to the affinity laws, we have
Qref.
Q=
nref.
nand
Href.
H=
(nref.
n
)2. (87)
By introducing the dimensionless head h and discharge q, (86) can be rewritten as
h(q) =H
Href.max.=
(n
nref.
)2
−(
QQref.max.
)2
= ν2 −q2. (88)
The efficiency curve of the pump is also known at nref and it is assumed that the max-imum efficiency point changes linearly with n, i.e. the point Qopt/n remains constantwhile varying the revolution number. Based on the authors’ experimental experience,this is a reasonable approximation. For the sake of simplicity, the maximum value ηmax.
will also be assumed to be constant, however, we are aware that this is only true forslight revolution number changes. Moreover, the location of the best-efficiency point is
123

assumed to be Qref.max./2, hence the efficiency curve is given by the simple formula
ηref. = 4ηref.max.
(1− Qref.
Qref.max.
)Qref.
Qref.max., (89)
which, after substituting the affinity laws (87) and denoting the dimensionless effi-ciency by e, turns into
e(q) =ηref.
ηref.max.= 4
(1− q
ν
) qν. (90)
The specific energy (Wallbom-Carlson 1998) needed to convey a unit volume of fluid is
F(Q) =Pin
Q=
QρgHηQ
=Hη
ρg =he
Href.max.
ηref.max.ρg. (91)
The dimensionless specific energy is
f (q) =Fρg
ηref.max.
Href.max.=
h(q)e(q)
= ν2 q+ν4q
. (92)
A few dimensionless curves at different revolution numbers are shown in Fig.30. An-other important family of curves are the isolines of specific energy. From (92), wehave
qν , f =− ν3
ν2 −4 f, (93)
from which the dimensionless head is
hν , f = ν2 −(
ν3
ν2 −4 f
)2
. (94)
Equations (93) and (94) define the coordinates of a curve, along which the specificenergy f is constant, with the dimensionless revolution number ν as parameter. A fewisolines of f are depicted in the right panel of Fig.30 while the performance curves andthe specific energy consumption along them is shown on the left panel. Note that h andf are different physical quantities and the fact that the two curves are tangent at a pointis due only to their scaling and does not implicate any additional information.
5.2.2 The hydraulic system
Let us assume that the instantaneous system performance curve is given by
Hs(Q) = A+BQ2, (95)
124

0 0.5 1 1.50
0.5
1
1.5
q [−]
h [−
], f [
−]
h(ν=0.8)h(ν=1.0)h(ν=1.2)f(ν=0.8)f(ν=1.0)f(ν=1.2)
0 0.5 1 1.50
0.5
1
1.5
q [−]
h [−
]
f=0.50f=0.75f=1.00ν=0.8ν=1.0ν=1.2
Fig 30. Left panel: Dimensionless performance curves of a pump: head (h) and specificenergy consumption ( f ) for different revolution numbers ν, as a function of the flow rateq. Right panel: Curves of constant dimensionless specific energy for different revolutionnumbers ν, as a function of the flow rate q drawn by using (93-94).
where A is the static head that might vary in time due to water level change, and B
represents the frictional loss of the system. Substituting the dimensionless form of thehead and the flow rate we obtain
hs(q) = α +βq2, (96)
The actual flow rate and head can be computed by solving (88) and (96) simultaneouslyand the specific energy is then obtained by using (92). An example of the operatingpoint as the intersection of the performance curves of the pump and the system is shownin the left-hand side of Fig.31. On the right-hand side, the specific energy needed toconvey fluid to the system is depicted. Note that since specific energy is the ratio of thehead and efficiency, it tends to infinity both for small and large flow rates. Hence, thereexists an optimal flow rate with minimal energy consumption, which is referred to aslocal optimum. The term local emphasises the fact that the optimal flow rate varies withthe static head α and also differs from the global optimum over a time interval, whichwe shall discuss later.
5.3 The reservoir filling problem
We consider the problem of filling up a reservoir (depicted in Fig.29) with the help ofa variable speed pump. For the sake of clarity, in this section the time available forthe filling process is unbounded and our only aim is to use the least possible energy.Section 5.3.1 deals with the case when the surface of the reservoir is considered to be
125

infinitely large and thus the water level is constant. The following subsections presentthe optimisation of the filling process in the case of a finite-surface reservoir without(Section 5.3.2) and with (Section 5.3.3) water consumption.
5.3.1 Infinitely large reservoir - the instantaneous optimal operatingpoint
Let us consider the problem of conveying a given amount of fluid V into the reservoirat the lowest energy expense. It is assumed that the surface of the reservoir is largeenough to neglect the water level change and thus the operating point is constant duringthe entire filling process. If the time needed for the pumping is denoted by T , the energyneed is
W = PinT =ρgHQ
ηT =
ρgHVη
=V F(Q), (97)
where V is constant. Thus we conclude that in this case the optimum flow rate repre-senting minimal energy need coincides with the extreme value of the specific energyconsumption. Using the dimensionless form of the specific energy, we have
0 =d f (q)
dν
∣∣∣∣q=qopt
. (98)
Besides (98), another necessary condition is that at the operating point, the system headequals the pump head:
ν2 −q2 = α +βq2 → ν =√
α +(β +1)q2. (99)
After combining and solving equations (98), (99), (92) and neglecting non-reasonablee.g. negative solutions and investigating the conditions of the minimum, for the caseβ �= 0 we obtain
ν =�e
[√α +
α2(β +1)4θ
(�√
3−1)− θ4β
(−�√
3−1)
], (100)
where � is the imaginary unit and
θ =
(−α3β 2 −α3β 3 +
√−α6β 3 −2α6β 4 −α6β 5
)1/3
. (101)
In the special case of β = 0, which corresponds to frictionless pipes, the solution of theequation system is simply
q =√
α/3, f = α and ν = 2q. (102)
126

0 0.2 0.4 0.6 0.8 1 1.20
0.2
0.4
0.6
0.8
1
q [−]
h [−
]
h(q) pumph(q) systemf=const
0 0.2 0.4 0.6 0.8 1 1.20
0.2
0.4
0.6
0.8
1
q [−]
h [−
], f[−
]
h(q) systemf(q)
Fig 31. Left panel: The instantaneous optimal operating point. Right panel: The specificenergy consumption as a function of the flow rate for the given pipeline loss curve.
In the case of α → 0 (the static head goes to zero) we have ν → 0 and q → 0, meaningthat at the low values of α the optimal flow rate becomes unrealistically low. Note thatthis is due to the unbounded time available for the filling process, which will be handledin a more realistic way in the latter sections.
Note that there is a transparent graphical interpretation of the above result: a straight-forward calculation shows that at the optimal operating point the f = constant curve istangent to the system performance curve on this modelling level. An example of theoptimal operating point by a given system performance curve is given in the left panelof Fig.31, which also shows the graphical solution of the problem.
Summarising the previous computations, formulae (100)-(102) allow the direct cal-culation of the optimal flow rate if the time available for the filling process is notbounded. (However, if the reservoir is not infinitely large, during the filling processthe static head α increases. We shall analyse this problem in the next section. It wasfound that if the friction loss is slow (small β values), the operating points correspond-ing the best efficiency and least energy consumption are close to each other and at β = 0they coincide, however, as system loss rises, the difference between them increases. Fig.32 depicts the latter case graphically. It is clearly seen that the flow rate correspondingto best-efficiency (eoptimal) and least-energy ( foptimal) do not coincide.
5.3.2 Finite reservoir without consumption
Let us consider the previous problem with finite reservoir surface; i.e. one has to fill thereservoir, from its initial water level Hb(egin) to He(nd), while the revolution number canbe set only at discrete time steps Δt. The total time of filling process is T = N Δt, where
127

0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
1.2
q [−]
h [−
], e
[−],
f [−
]
h(q) systemν(q) pumpe(q)f(q)e
optimal
foptimal
Fig 32. The dimensionless specific energy consumption and efficiency curves for thenetwork at different revolution numbers of the pump. The best-efficiency point eoptimal
(q = 0.46,ν = 0.91) differs from the minimal specific energy consumption point foptimal (q =
0.27,ν = 0.74). (Bene & Hos 2012, published by permission of ASCE).
N is a free parameter but Δt is fixed, e.g. to one hour. The corresponding dimensionlessquantities are αb, αe and τ , for details see Tables 13 and 14. The objective to minimiseis
N
∑i=1
fiqiΔτ → Min!, (103)
where
fi = ν2i
qi +νi
4qi, νi =
√αi +(β +1)qi2 and αi = αi−1 +qi−1Δτ/γ . (104)
Moreover, due to the prescribed initial and final reservoir level, we have
α1 = αb and αN+1 = αe (105)
and γ is the dimensionless surface of the reservoir.Note that the model loses its validity in the vicinity of zero flow rates: by taking the
q → 0 limit of the dimensionless input power we obtain
limq→0
f q = limq→0
ν(q)2(ν(q)+q)4
=
= limq→0
(α +(β +1)q2
)(√α +(β +1)q2 +q
)4
=α 3
2
4, (106)
128

which is non-physical because the idle input power of the pump does not depend on theactual water level of the reservoir. However, this inconsistency vanishes if the q = 0case is handled as the pump is turned off, i.e. the energy consumption is zero in theperiod and the water level remains as in the previous period.
The global optimum
The optimisation problem defined by (103) - (105) can be solved numerically by e.g.using an in-house dynamic programming method. Both the state space and the actionspace is only one dimensional, the discretised dimensionless water level and the discre-tised revolution number, respectively:
x(t) = α(t)
u(t) = ν(t). (107)
Due to the low dimensional problem, the state and the action space were discretisedinto 100× 100 levels. The algorithm itself is a basic dynamic programming methodwithout any advanced properties, for details see Section 1.5.2. The physical parameterswere Qre f .max. = 3dm3/s, Hre f .max. = 10m, nre f = 1500rpm, ηre f .max. = 70%, Hb = 5m,B = 1.2× 106 s2m−5, S = 5m2, He = 8m, giving γ = 0.05, αb = 0.5, αe = 0.8, andβ = 1.08.
Table 15. Effect of the number of periods for the optimal schedule, computed with a DP.
N 1000×Ob j. q1 q2 q3 q4 q5 q6
2 16.299 1.2316 1.2653
3 12.561 0.9510 1.0071 1.0969
4 11.808 0.8724 0.9061 0.9398 0.9847
5 11.808 0.8724 OFF 0.9061 0.9398 0.9847
6 11.808 0.8724 OFF OFF 0.9061 0.9398 0.9847
Table 15 summarises the simulation results for increasing number of time intervalsN of the same length Δt = 60min (Δτ = 0.0108). It can be clearly seen that after aspecific number of N neither the objective value nor the flow rate values changes butadditional periods appear randomly, in which the pump is switched off. Based on theseruns, we conclude that the optimal schedule can be found by subsequently increasing
129

the number of time intervals until the first ’empty’ period appears. The number ofnon-empty periods is referred to as active periods from now in.
Global optimum as a series of local optima (SLO)
Formulae (100)-(102) provide an easy and straightforward way of computing the op-timum flow rate for a given reservoir water level, which suggests that if the reservoirhas finite surface and the water level changes, it might still be useful to use the sameequations step by step over finite time intervals until the target level is reached whileupdating the reservoir water level after each step. Note that this methodology results ina slight overfill in the last period. As a next step, a numerical experiment was performedto test if the series of the local optima given by (100)-(102) gives the global optimumfound by the DP in the previous section. We shall refer to these techniques as SLO (se-ries of local optima) and global search (DP), respectively. The same target levels wereprescribed for the DP which were obtained by the SLO technique.
Table 16. Comparison of the number of the active periods and the objective values in thecase of the global optimisation and the SLO technique. No water demand. NAP = Number ofactive periods.
Time step Real target NAP Objective value
Δτ αe Global (DP) SLO Global (DP) SLO
0.0108 0.8612 5 5 15.07 15.040.0054 0.8256 9 9 13.60 13.560.00108 0.8051 41 42 12.81 12.800.00018 0.8005 299 248 12.95 12.62
Table 16 compares the results for several temporal resolutions: 60 minutes (Δτ =
0.0108), 30 minutes (Δτ = 0.0054), 6 minutes (Δτ = 0.00108), and 1 minute (Δτ =
0.00018).The objective values and the number of active periods coincide apart from the finest
temporal resolution (Δτ = 0.00018). In this case the discretisation of the DP was clearlyinsufficient. On the other hand while increasing the resolution (decreasing Δτ values),the final reservoir level of the local search approaches the prescribed water level αend
from above. A thorough parameter study (see next section) proved that the series of the
130

0 0.2 0.4 0.6 0.8 1 1.20
0.2
0.4
0.6
0.8
1
1.2
q [−]
h [−
], α
[−]
pumpsystemf=const
Fig 33. Tank filling process where boxes represent reservoir level steps, circles denote theoperating points.
local optima is equivalent to the global optimum for a wide range of parameters. Thefilling process in the case Δτ = 0.0108 is shown in Fig.33.
5.3.3 Finite reservoir with constant consumption
Let us now consider the case when a constant consumption ϕ is present at the node (seeFig. 29). The formula for calculating the reservoir level change turns into
αi = αi−1 +(qi−1 −ϕ)Δτγ. (108)
The objective function has to be slightly modified. As the time span of the reservoirfilling is a free parameter, the longer the filling period becomes, the more consumptionmust be covered, hence the comparison between filling periods of different length basedon the original objective function (103) is fallacious. Instead, we minimise only theenergy need of filling the reservoir:
Ob j.=N
∑i=1
fi(qi −ϕ)Δτ → Min!. (109)
The test runs presented in this section are identical to those ones of the previous one,apart from that a consumption of 0.5 dm3/s (ϕ = 0.1667) was added. Table 17 com-pares the SLO technique with the global optimisation results obtained by the DP.
131

Table 17. Comparison of the number of the active periods and the objective values in thecase of the global optimisation and the SLO technique. Water demand: ϕ = 0.1667. NAP =Number of active periods.
Time step Real target NAP Objective value
Δτ αe Global (DP) SLO Global (DP) SLO
0.0108 0.8233 8 9 13.45 13.450.0054 0.8062 15 17 12.78 12.750.00108 0.8015 86 83 12.81 12.650.00018 0.8001 299 495 13.25 12.61
The result are very similar to the case without the consumption: both the numbersof the active periods and the objective values are very close to each other, except for thefinest resolution.
A thorough parameter study was performed to compare the local search and theglobal optimisation results for a wide range of system parameters. The time step wasfixed at Δτ = 0.00108, which corresponds to a physical time of 6 minutes. A grid wasgenerated over the whole parameter space of 10 nodes with values αb ∈ [0.1 1], αe ∈[0.1 1], and 5 nodes with values β ∈ [0 1.5], γ ∈ [0.01 0.1] and ϕ ∈ [0 0.3]. Hencethe total number of the problems was 102 × 35 = 12500, covering also cases with andwithout consumptions. The objective relative difference (ORD) is defined as
ORD =Ob j.SLO −Ob j.DP
Ob j.SLO×100%. (110)
and is used for measuring the performance of the two techniques. After neglecting thenon-physical problems, e.g. unrealistically high system loss compared to the consump-tions, αend < αbeg, or filling period longer than 12 hours, 3137 different problems wereobtained.
As it was mentioned before, the SLO technique itself is not able to set the exacttarget level of an optimisation: it sets at every time step the lowest SEC value even ifthe water level is higher than the original target level. In order to compare neutrally,there are two possibilities. The first one, which was also used before, is that the lastwater level obtained by SLO is set as the target level for DP. The other case is when theschedule of the last period of SLO is recalculated in order to reach the exact, originaltarget level. Both types of simulations were performed, they are referred to as overfill
and exact target level, respectively.
132

−10−8 −6 −4 −2 0 2 4 6 8 100
500
1000
1500
2000
2500
ORD [%]
Num
ber
of r
uns
[−]
0 20 40 60 80 100 120−7
−6
−5
−4
−3
−2
−1
0
1
SLO Filling periods [−]
OR
D [%
]
Fig 34. The relative differences of the objective values (ORD) between the SLO and globaloptimiser (DP). Aim: filling the reservoir. Slightly overfill was allowed in the last period.
Figs. 34 and 35 show the histograms of the relative differences of the objectives andits dependency on the filling periods. It is clear that in the overfill case (Fig. 34) theonly reason of the difference is the insufficient resolution of the computational grid ofthe DP. Thus one can conclude that the global optimum can be obtained as the series ofthe local optima. In the second case, when the overfill is not allowed, the results of theSLO technique are only near-optimal: the longer the optimal filling period is, the betterthe objective value of the SLO is, compared to the DP technique (Fig.35). Setting thewater level in order to reach the exact target level is always performed in the last period.If the filling process is long, this effect does not impair the objective value.
5.4 Optimisation over finite time interval - 24-hour pump schedule
We are now in the position of moving to a more realistic problem, i.e. to give the optimalpump control policy of a given time interval (typically 24 hours) for the test network(see Fig. 29). For a more realistic problem, the consumption changes during the day
133

−10−8 −6 −4 −2 0 2 4 6 8 100
500
1000
1500
ORD [%]
Num
ber
of r
uns
[−]
0 20 40 60 80 100 120−10
−5
0
5
10
15
20
25
SLO Filling periods [−]
OR
D [%
]
Fig 35. The relative differences of the objective values (ORD) between the SLO and globaloptimiser (DP). Aim: filling the reservoir. Overfill was not allowed.
in a way that reflects real-life observations, see Fig.36, the detailed consumption datacan be found in Appendix 1.1.2. The objective function is the total energy consumptiondefined by (103). An additional constraint is introduced, i.e. the reservoir level at theend of the day must be exactly the same as the initial level:
αend = αbeg. (111)
It should be noted that αbeg is considered to be a free parameter, hence a daily optimalschedule would be to keep the water level in the reservoir continuously as close to itsallowed minimum value as possible. However, this policy is discouraged in real-lifeapplications because operators usually prefer having some amount of reserved water(over the usual safety storage) at the beginning of the morning or evening peak periods.
The proposed optimal pump schedule policy is as follows:
Step 1: Discharge the reservoir. At the beginning of the optimisation period thepump is switched off to reach the lowest allowed level in order to keep the statichead as low as possible.
134

Step 2: Keep the water level close to the lowest allowed value. If the waterlevel in the reservoir is close to the minimum level and the level would fall be-neath the minimal allowed level in the next period, the pump is turned on and itsrevolution number is set to the local optimal value. Once the pump is turned on itcannot be switched off for a given number of periods in order to keep the numberof switches on a reasonably low value. In the case of the test 5 on periods givingminimum 30 minutes of continuous operation were set, during which the revolu-tion number can be adjusted to the local optimum. The pump will be turned offagain if the water level does not fall beneath the allowed value in the period.
Step 3: Filling To finish the pump schedule, the reservoir must be filled back to thesame level as in the beginning of the optimisation, which is controlled by thepreviously described SLO technique. However, to obtain a precise comparisonbetween the global optimisation, which sets the final reservoir level accurately,and the local search technique, which ends up with a slight overfill, in the lastperiod such a flow rate is set which guarantees the exact final water level insteadof the local optimum.
Note that it is not trivial when to finish step 2 and start step 3. An easy and wastefulway of overcoming this problem is to compute the filling process after each internalstep of step 2 until its end coincides with the end of the whole optimisation period.Even in this case the SLO technique requires 1-2 seconds to find the solution while onesingle run of the DP technique takes about 1 minute. Both methods were implementedin MATLAB without parallelisation and run on a PC equipped with Intel Core2DuoT6600 CPU.
A typical daily schedule is shown in Fig. 37, together with the DP solution. As itcan be seen, the result of the global optimisation policy follows the heuristic SLO policydescribed above: empty the reservoir - keep the water level close to the minimum - fillit back. The filling processes are also similar in the two cases, however, they are notexactly the same.
A thorough parameter study was performed, the parameter space was the same asin the previous case, except that αe was considered as start, as ending and as maximumlevel while αb was considered as the minimum level. The consumption values of theprevious sections were used as mean consumptions, the hourly flow rate values wereobtained by multiplying the mean value by the normalised water consumption distri-
135

0 4 8 12 16 20 2420
40
60
80
100
120
140
160
180
time [h]
cons
umpt
ion
wei
ght [
%]
Fig 36. Water consumptions in the percentages of average flow rate. For detailed data seeAppendix 1.1.2.
bution, which is shown in Fig.36, and the detailed weighting factors can be found inAppendix 1.1.2.
The rest of the numerical parameters were identical with the previous sections. Af-ter neglecting the non-reasonable tasks, e.g. too small flow rate at the nominal pointrelated to the consumptions, the filling period cannot be finished until the end of the op-timisation horizon, 3036 different problems were obtained. Comparison of the resultsis shown in Fig.38. Although the results of the SLO technique and the global optimiserDP are in the most cases close to each other, in some cases significant differences can beobserved. The SLO technique provides worse solution mainly when the filling processis relatively short. The result of the DP method is worse when the discretisation is in-sufficient. Some of these solutions were repeated at 500×500 discretisation level, boththe state and action space was discretised into 500 values. It resulted in an objectivevalue close (within 1%) to the other method.
5.5 Summary and criticism
In the present chapter a method was introduced in order to provide the optimal scheduleof a simple network, which consists of a variable speed pump, a pipeline, and a watertank by the means of minimising the specific energy consumption. It was shown that themethod resulted in lower energy consumption than in the case where efficiency of thepump is maximised. The optimality of the method was numerically proved by compar-
136

αb=0.1000 α
e=0.2000 β=0.0000 γ=0.0775 φ=0.0825
time [h]
α [−
]
0 4 8 12 16 20 240.1
0.12
0.14
0.16
0.18
0.2
SLODP
SLO total cost= 2.6928, DP total cost= 2.6974
time [h]
ν [−
]
0 4 8 12 16 20 240
0.2
0.4
0.6
0.8
SLODP
Fig 37. Comparison of the optimal schedules obtained by the two methods.
ing it to an in-house discrete dynamic programming method, which was implementedwith very fine resolution.
The water tank was first investigated by using analytical characteristic curves whichare close to the performance curves of real pumps. It was shown that the workloadof the pump is energetically better than the specific energy consumption is minimisedinstead of maximising the efficiency of the pump. It was determined that the methodstill works with real-life, measured curves.
As an extension of the first method, a new case was investigated when the waterlevel variation in the reservoir cannot be neglected and a constant, a priori known con-sumption is present at the bottom node of the reservoir. It was discovered that globaloptimum can be gained by discretising the time horizon and using the above mentionedmethod to find the optimal revolution number. In other words, the series of the localoptima (the current revolution number at the given reservoir level) gives the global op-
137

−10−8 −6 −4 −2 0 2 4 6 8 100
100
200
300
400
500
600
ORD [%]
Num
ber
of r
uns
[−]
0 30 60 90 120 150−70
−60
−50
−40
−30
−20
−10
0
10
20
SLO Filling periods [−]
OR
D [%
]
Fig 38. The relative differences of the objective values (ORD) between the SLO and globaloptimiser (DP). Aim: 24h long schedule. Overfill was not allowed.
timum (the control trajectory) for the investigated time horizon. This phenomenon wasproved by comparing the results to the DDP method.
The last step was to solve the daily scheduling problem besides a changing butdeterministic water demands. Here, the optimisation process is suggested to divideinto three phase: emptying, keeping the water level close to the bottom level, and afilling process which was introduced above. Comparisons showed again that the methodprovides near-optimal solutions.
The presented method works only on single tank filling processes and does not takeinto account the differences of the energy tariff during the optimisation horizon. How-ever, the aim of this chapter was not developing a general optimiser for waterworks butrather understanding the optimal operation of a variable speed pump from an energeticpoint of view.
138

5.6 Contribution
I developed a method for the energy optimisation of a simple network consisting of onereservoir, a pipeline, and a variable speed pump. The approach is based on minimis-ing the specific energy consumption. I performed a thorough parameter study on thetest network and the obtained results were compared to the results of a standard, highresolution discrete dynamic program.
– I investigated the tank filling process. The filling process was discretised in time andin each time period those revolution numbers were set which represented the lowestspecific energy consumption at the current water level. In other words, the fillingprocess follows the series of local optima. The method provided the same or betterresults within 4% of the running time of the DDP.
– I developed a pump scheduling policy for a finite time horizon in the presence ofdeterministic but time-dependent water consumption. The optimal schedule consistsof the following phases: emptying, keeping the water level close to the allowed min-imum, and filling as it was suggested above. The method provided the same resultson average within 2.5% of the running time of the DDP.
Related publications: Bene & Hos (2011), Bene (2011), Bene & Hos (2012).
5.7 Tézis
Kidolgoztam egy olyan módszert, mely a fajlagos energia-felhasználás minimalizálásá-val keresi meg egy egyetlen tartályból, csovezetékbol és hajtásszabályozott szivattyúbólálló rendszer optimális üzemvitelét, végtelen kútkapacitást feltételezve. A tesztfelada-tot széles paramétertartományban vizsgáltam, és nagy felbontású dinamikus programo-zással kapott eredményekhez hasonlítottam.
– Megvizsgáltam azt a feladatot, amikor a hálózatban lévo medence feltöltése a cél. Atöltési folyamatot idoben diszkretizáltam és az egyes idoszakokra az aktuális meden-ceszinthez tartozó legkisebb fajlagos energia felhasználású fordulatszámokat (lokálisoptimumokat) követtem. A módszer rendre azonos vagy jobb megoldásokat adott aDP-hez képest a számítási ido 4%-a alatt.
– Üzemeltetési stratégiát dolgoztam ki a hálózat adott idointervallumban való üzemel-tetésére idoben változó, determinisztikus fogyasztások mellett. A menetrendet háromszakaszra osztottam: ürítés, a megengedett minimumszint közelében lévo szinttartás,
139

és a tározó visszatöltése az elozo pont szerint. A tesztfuttatások eredményeképpenmegállapítható, hogy a módszer a DP-vel átlagosan azonos célfüggvény értéku me-netrendeket szolgáltat a futási ido 2,5%-a alatt.
Kapcsolódó publikációim: Bene & Hos (2011), Bene (2011), Bene & Hos (2012).
140

6 Conclusions
6.1 Discussion
The schedule optimisation of regional water distribution systems covers a huge segmentof water management problems. It means that it is almost impossible to deal withevery aspect of this research field or to develop a superior optimiser which performswell in any circumstances in every kind of waterwork system. Accordingly, the aim ofthis Ph.D. thesis was not to find the ’best schedule optimiser’ but to present improvedoptimisation algorithms for solving different problems by different solving methods. Inaddition, more sections in this thesis focus not only on determining optimal or near-optimal schedules, but also on understanding the optimality of the results. Althoughthe presented methods do not give the reader a detailed overview of the topic, I believethat they are good enough to provide an impression on how difficult and diversifiedthe discussed research field is. The presented method can possibly serve as a basisfor further methods. Besides, a relevant part of the presented techniques already haveindustrial realisations which solve everyday, real-life problems in an elegant manner.
The objectives of scheduling problems could be various. The most used objectivefunctions are obviously the total pumping energy or total pumping cost for the optimi-sation period. The total number of pump switches can serve as an alternative objectivefunction to be minimised. The methods in the thesis involve the above mentioned objec-tives on deterministic, single-objective, pump scheduling optimisation systems. Notethat in the field different objective functions are also present, including multi-objectiveaims. In the case of stochastic systems, disturbances can appear e.g. from the stochas-tic nature of the consumptions, and defining a proper objective function can also be acumbersome problem.
The advantages of a novel developed method can also be various: they can provide’better’ or ’more reliable’ results than former approaches. Its applicability can be deeperi.e. it covers a wide range of the existing problems. It can be interesting from industrialpoint of view or, obviously, from scientific point of view. The following paragraphsevaluate the presented techniques taking into account these aspects.
The thesis presents a novel genetic algorithm for solving a wide range of pumpscheduling problems. Since evolutionary methods are very popular and they are saidto be ’robust’, this method was intended to solve complex problems. The power of the
141

method is the use of the neutral theory of genetic algorithms with a suitable constrainthandling system. The developed neutral genetic algorithm provided the best resultsin pumping cost and success rate compared to other traditional genetic algorithms (e.g.Deb’s, Powell–Skolnick, and Penalty method) but if and only if the improved constrainthandling was used. The technique is directly applicable to the daily optimisation tasksof middle-sized (e.g. Sopron) and large (e.g. Budapest) systems, works well with apriori determined pump operation points and coupled hydraulic simulations as well.The robustness of the approach is also high, the measured success rate was about 96%on the test problems.
Although the genetic algorithm performed well on the test cases, a typical industrialdemand is that the algorithm must perform even more reliable than the obtained 96%success rate. Therefore the new direction of the research was focused on deterministicsolvers. First, an exact dynamic programming algorithm was developed, which guar-antees the global optimum of the so-called combinatorial optimisation problem. Thistype of optimisation problems is a special but typical set-up which means that all thepumps in the network have discrete operation points, i.e. flow rate–inlet power valuepairs. This is only valid if the pumps are direct driven pumps or discretised variablespeed pumps and their operation points are constant (i.e. not affected by the state of thesystem). The novel algorithm exploits the so called permutational symmetries of theunderlying problem, which means that more pump schedules lead the system into thesame state. The exploitation of this phenomenon allows us to discretise the state-spacewithout information loss thus the algorithm provides the global optimum. The problemdoes not solve the curse of dimensionality: the search space still grows exponentiallywith respect to the action space. However, for a middle-sized combinatorial networkwith 4-5 pumps with 2-3 fixed operational points, it provides a very elegant global so-lution of the problem. Another benefit of the method is that it gives a straightforwardgraphical interpretation of an optimal schedule (trajectory) of a small system.
As a next step, I moved towards to more realistic systems. The required higher flexi-bility, i.e. no restrictions on the pumps, and larger networks suggested developing a newapproximate dynamic programming method. The technique decomposes the networkinto well field and distribution systems which can be solved separately thus the searchspace decreases significantly. Besides, the state space of the remaining distribution net-work can be further reduced by determining the ’important’ reservoirs of the systemwhich are enough to involve in the model in order to obtain feasible, near-optimal re-sults. The test results showed that the approximate dynamic programming approach
142

provides nearly the same objective values than the former developed genetic algorithm(within 1% relative error) but it has a success rate of 100%. The test case operated witha priori determined pump operation points. The algorithm could be extended for thecases which involve coupled hydraulic simulations, however, the computational time isexpected to increase drastically.
The last topic carried out is the investigation of energetic relations of a simple net-work which consists of a water reservoir, a concentrated consumption point, a simplifiedpipe network fed by a variable speed pump. Using the specific energy consumption asobjective function, it was analytically shown that the total cost of delivering a givenamount of water to the reservoir is lower than the case where the efficiency of the pumpis maximised. A similar result was obtained in the case where the level change of thereservoir is significant and affects the operation point of the pump. A numeric proofwas given over a wide range of parameters. It confirmed that following the series ofthe local optima, i.e. the lowest specific energy consumption in each timestep results inthe global optimum. At last, a complete daily schedule of the system was determinedby the same method. Here only the good quality of the obtained objective values wereillustrated.
Using economical pump schedules plays a significant role in reducing the energyconsumption of the mankind, thus, it helps to take into account the aims of the sus-tainable development. I hope, that my Ph.D. work would contribute a little to theseaims.
6.2 Critical assessment
The benefits and drawbacks of the developed approaches have been already discussed atthe end of each chapter under Summary and criticism. In addition, it is fair to emphasisethe main disadvantage of all the above mentioned methods: they solve only particularbut realistic problems.
Accordingly, the most significant lesson that I have learnt is that there is no supe-rior pump schedule optimiser software or algorithm. I developed methods which areintended to solve complex scheduling problems. Even so, there is no reason of usingthem for such a problem where exact solution can be gained with other types of algo-rithms. The geographical differences of WDSs were highlighted in Section 1.2.2, whichalso inspired me to develop more different techniques.
143

Two chapters deal with smaller systems and they have rather scientific significancelike obtaining the global optimum of middle-sized combinatorial problems or under-standing the energy-optimality of a variable speed pump. The general solvers whichwere presented in Chapters 2 and 4 still suffer from the high computational demandof the hydraulic simulations and the lack of the proper modelled water consumptions.Hence, these topics imply the most possible future research directions as it can be readin the next section.
One has to be careful as well while explaining the obtained results by several al-gorithms. Remember that the solvers of the NEOS server were always used with theirdefault settings thus they might perform better with carefully tuned parameters. More-over, NEOS solvers beat my methods in several cases, however, each solver of NEOSis being continuously developed by large groups of engineers and mathematicians. Ac-cordingly, the aim of my techniques is not to serve as the best algorithms for solvingpump scheduling problem but showing the potential of these methods and understand-ing the optimal control if it is possible.
The control of the pumps or pump groups can be realised by local controllers or cen-tralised control system as it was already mentioned in Section 1.2.2. This dissertationdeals only with centralised optimal control. However, the main outcome of Chapter 5,namely following the local optima of the specific energy consumption could be easilyimplemented by local controllers as well.
It is worth to mention the optimisation problems of multi-reservoir systems. Theseare physically the opposite of WDSs: the aim of these systems is to generate moreenergy by the turbines which is possible while taking into account similar constraints,e.g. reservoir capacity limits. Stochastic water inputs exist instead of water demands.The optimisation task can be formulated mathematically similar to the presented WDSscheduling problems, however, they are not part of the scope of this dissertation.
6.3 Future directions
An input data of the optimisers is the water consumption of the next 24 hours, which isobviously not known a priori but only estimated with the help of statistical techniques.Whatever the forecast technique is, from the point of view of the optimiser, the waterconsumption is a set of numbers which does not include any information on its uncer-tainty or probability, which can be considered as the bottleneck of the technique. Sincethe real consumptions will obviously differ from the forecasted ones (Bárdossy et al.
144

2009, Alvisi et al. 2007), the computed optimal control will not be optimal for the realconsumptions. While following the computed optimal pump schedule, a deviation be-tween the real and predicted values (e.g. reservoir levels) will be experienced, which ismainly caused by the stochastic nature of water consumption.
To cope with this stochastic nature, the entire way of modelling has to be reconsid-ered. Stochastic dynamic programming (SDP, Stedinger et al. 1984, Cervellera et al.
2006) is a popular approach in the field of multi-reservoir system operation thus it canserve as a good basis for the optimalisation of potable water distribution systems aswell. The consumption data can be modelled as truncated Gaussian variables, whichare usually obtained by statistics. A more precise description of the real life consump-tions could be reached if a forecasting model was used to generate them. Alvisi et al.
(2007) provides a good example for a short-term water demand forecasting, however, itdeals only with the expected values of the consumptions while our approach needs thewhole distribution. It is also evident that a forecast-model increases the dimensions ofthe solvable problem, which could make it computationally infeasible.
Note that SDP usually provides a feasible alternative only when the problem di-mension is small enough. As the problem dimension increases, SDP encounters seri-ous computational issues, including excessive demand of computing time and storagerequirements. More precisely, the computational and storage requirements grow expo-nentially with respect to the state, control, and disturbance dimension. This fact is wellknown as the curse of dimensionality and represents a severe limiting factor for theapplication of the SDP.
To resolve the computational difficulties, predictive control strategies have recentlygained much interest. Under predictive control, an optimal open-loop control problem(see Bertsekas 2005) is defined and solved on a finite horizon, using non-linear program-ming techniques which are usually not subject to dimensionality issues. The open-loopoptimisation results in an optimal operating plan. As a management policy, only thefirst stage of this operating plan is actually implemented, the remaining components arediscarded, and at the next control instant a new problem is formulated and solved byshifting the time horizon, called as receding horizon principle.
Another possible future research direction is to accelerate the hydraulic simulationof the optimiser. This is crucial from the point of view of computational speed sincethe evaluation of one single candidate solution requires 24 steady state hydraulic simu-lations; each hydraulic simulation consists of solving a non-linear equation system witha dimension of the number of branches plus the number of nodes. Almássy et al. (1981)
145

solves an equation system of a size of the number of independent loops in the networkwhile Todini & Pilati (1988) and Salgado et al. (1988b) presented a method where thenumber of the equations are equal to the number of branches. Although their methodis widely applied and popular (e.g. the commercial software EPANET (2012) uses thisapproach), the last results were published in the late 80’s thus a possible research gapappears in this research field. Others (Rao & Alvarruiz 2007, Jamieson et al. 2007)substitute the hydraulic solver with neural networks but also in that case the learningprocess requires a huge amount of simulations with the original simulation solver.
146

References
Adamowski J (2008) Peak daily water demand forecast modeling using artificial neural networks.Journal of Water Resources Planning and Management 134(2): 119–128.
Alandi P, Pérez P, Álvarez J, Hidalgo M & Benito J (2005) Pumping selection and regulation forwater-distribution networks. Journal of Irrigation and Drainage Engineering 131(3): 273–281. Doi:10.1061/(ASCE)0733-9437(2005)131:3(273) (9 pages).
Almássy B, Budavári S & Vajna Z (1981) Economically computarized calculations for large sizelooped pipe-networks. Acta Technica 93: 153–168.
Alvisi S, Franchini M & Marinelli A (2007) A short-term, pattern-based model for water-demandforecasting. Journal of Hydroinformatics 9(1): 39–50.
Angel PL, Hernandez JA & Agudelo R (1999) Fuzzy expert system model for the operation ofan urban water supply system. Proc. Savic DA & Walters GA (eds) Computing and controlfor the water industry, Research Studies, Baldock, U.K., 449–457.
Archibald TW, Mckinnon KIM & Thomas LC (1997) An aggregate stochastic dynamic program-ming model of multi-reservoir systems. Water Resources Research 33(2): 333–340.
Atkinson R, van Zyl JE, Walters GA & Savic DA (2000) Genetic algorithm optimisation of level-controlled pumping station operation. Technical report, Centre for Water Systems, Exeter,U.K.
Baltar AM & Fontane DG (2008) Use of Multiobjective Particle Swarm Optimization in WaterResources Management. Journal of Water Resources Planning and Management 134(3): 257–265.
Barán B, Lücken C & Sotelo A (2005) Multi-objective pump scheduling optimisation using evo-lutionary strategies. Advances in Engineering Software 36: 39–47.
Bartz-Beielstein T (2006) Experimental Research in Evolutionary Computation. The New Exper-amentalism. Natural Computing. Springer-Verlag Berlin Heidelberg, 1st edition.
Bene J (2011) Energy optimization of a variable speed pump. Proc. 4th Annual JOPOKKI Post-Graduate Seminar, Oulu, Finland.
Bene J & Hos C (2006) Computation of cost-optimal pump scheduling for regional waterworkusing genetic algorithm. Proc. Fifth Conference on Mechanical Engineering (Gépészet 2006),Budapest, Hungary.
Bene J & Hos C (2009) Regionális vízmûhálózat üzemvitel-optimalizációja. Proc. OGÉT 2009 -XVII. Nemzetközi Gépészeti Találkozó, Gheorgeni, Romania.
Bene J & Hos C (2010) A novel constraint handling technique for genetic algorithm-based pumpschedule optimization. Proc. Seventh Conference on Mechanical Engineering (Gépészet2010), Budapest, Hungary.
Bene J & Hos C (2011) Tározó minimális energia-felhasználású töltése változtatható fordulat-számú szivattyúval. Szivattyúk, kompresszorok, vákuumszivattyúk 18(1): 25–29.
Bene J, Hos C & Farkas B (2012a) A case study on pump schedule optimization of large-scalewaterwork system. Proc. Eighth Conference on Mechanical Engineering (Gépészet 2012),Budapest, Hungary.
Bene J, Selek I & Hos C (2010) Neutral search technique for short-term pump schedule optimiza-tion. Journal of Water Resources Planning and Management 136(1): 133–137.
147

Bene JG & Hos CJ (2012) Finding least-cost pump schedules for reservoir filling with a vari-able speed pump. Journal of Water Resources Planning and Management 138. DOI:10.1061/(ASCE)WR.1943-5452.0000213.
Bene JG & Selek I (2012) Water network operational optimization: Utilizing symmetries incombinatorial problems by dynamic programming. Periodica Polytechnica Civil Engineering56(1): 1–12.
Bene JG, Selek I & Hos CJ (2013) Comparison of deterministic and heuristic optimization solversfor water network scheduling problems. Water Science and Technology: Water Supply 13.Accepted paper.
Bene JG, Selek I, Hõs C, Havas A & Varga (2012b) Comparison of deterministic and heuristicoptimization solvers for water network scheduling problems. Proc. 6th International Confer-ence for Young Water Professionals, Budapest, Hungary.
Bernier MA & Bourret B (1999) Pumping energy and variable frequency drives. ASHRAEJournal 37–40.
Bertsekas DP (2005) Dynamic Programming and Optimal Control, volume I. Athena Scientific,3rd edition.
Bhave PR (2003) Optimal Design of Water Distribution Networks. Alpha Science InternationalLtd.
Bhave PR & Gupta R (2006) Analysis of Water Distribution Networks. Alpha Science Interna-tional Ltd.
Bohl W (1994) Strömungsmaschinen 1, Aufbau und Wirkungsweise. Vogel Buchverlag. (InGerman.).
Boulos PF, Orr CH, De-Schaetzen W, Chatila JG, Moore M, Hsiung P & Thomas D (2001)Optimal Pump Operation of Water Distribution Systems Using Genetic Algorithms. Proc.AWWA Distribution System Symposium, American Water Works Assotiation, Denver.
Bárdossy G, Halász G & Winter J (2009) Prognosis of urban water consumption using hybridfuzzy algorithms. JOURNAL OF WATER SUPPLY RESEARCH AND TECHNOLOGY-AQUA 58(3): 203–211.
Brion LM & Mays LW (1991) Methodology for Optimal Operation of Pumping Stations in WaterDistribution Systems. Journal of Hydraulic Engineering 117(11): 1551–1569.
BUTE (2012) Joint degree agreement. http://www.gpk.bme.hu/PhD/images/gepeszkar/doku/doktorjelolt/nemzetkozi-megall/Egyuttmukodesi-megallapodas-Oulu-University-Bene-Jozsef.pdf.
Castelletti A, Pianosi F & Soncini-Sessa R (2008) Water reservoir control undereconomic, social and environmental constraints. Automatica 44: 1595–1607.Doi:10.1016/j.automatica.2008.03.003.
Cembrano G, Wells G, Quevedo J & ad R Argelaguet RP (2000) Optimal control of a waterdistribution network in a supervisory control system. Control Engineering Practise 8: 1177–1188.
Cervellera C, Chen VCP & Wen A (2006) Optimization of a large-scale water reservoir networkby stochastic dynamic programming with efficient state space discretization. European Jour-nal of Operational Research 171(3): 1139–1151.
Chandramouli V & Raman H (2001) Multireservoir modeling with dynamic programming andneutral networks. Journal of Water Resources Planning and Management 127(2): 89–97.Doi:10.1061/(ASCE)0733-9496(2001)127:2(89) (10 pages).
Chaudhry MH (1987) Applied hydraulic transients. Van Nostrand Reinhold.
148

Chen VCP (2002) Measuring the goodness of orthogonal array discretizations for stochastic pro-gramming and stochastic dynamic programming. Siam Journal on Optimization 12(2): 322–344. Doi:10.1137/S1052623498332403.
Clark RM, Sivaganesan M, Selvakumar A & Sethi V (2002) Cost models for water supply distri-bution systems. Journal of Water Resources Planning and Management 128(5): 312–321.
Coello CA & Pulido GT (2001) A micro-genetic algorithm for multiobjective optimization. Lec-ture Notes in Computer Science 1993: 126–140.
Coello CAC (2002) Theorethical and numerical constraint–handling techniques used with evolu-tionary algorithms: A survey of state of the art. Computer Methods in Applied Mechanicsand Engineering 191(11–12): 1245–1287.
Cormen TH, Leiserson CE, Rivest RL & Stein C (2003) Introduction To Algorithms. McGraw-Hill.
Coulbeck B (1977) Optimisation and modelling techniques in dynamic control of water distribu-tion systems. Ph.D. thesis, University of Sheffield.
Crowder H, Johnson EL & Padberg M (1983) Solving large-scale zero-one linear programmingproblems. Operations Research 31(5): 803–834.
Darabos P (1997) Software package for controlling water supply systems. Periodica PolytechnicaCivil Engineering 41(2): 135–145.
Darwin C (1859) The Origin of Species. John Murray.De Jong KA (1975) An analysis of the behavior of a class of genetic adaptive systems. Ph.D. the-
sis, University of Michigan. Dissertation Abstracts International, 36(10), 5140B, (UniversityMicrofilms No. 76-9381).
Deb K (2000) An Efficient Constraint Handling Method for Genetic Algorithms. ComputerMethods in Applied Mechanics and Engineering 186(2–4): 311–338.
Eiben AE & Ruttkay Z (1997) Constraint-satisfaction problems. In: Bäck T, Fogel DB & Michale-witz Z (eds) Handbook of Evolutionary Computation, chapter C5.7, 1–8. IOP Publishing Ltd.and Oxford University Press. ISBN 0-750-30392-1.
Eiben AE & Smith JE (2003) Introduction to Evolutionary Computing. Natural Computing.Springer–Verlag Berlin Heidelberg, 2nd edition.
EPANET (2012) Software that models the hydraulic and water quality behavior of water distribu-tion piping systems. http://www.epa.gov/nrmrl/wswrd/dw/epanet.html.
Fallside F & Perry PF (1975) Hierarchical optimisation of a water-supply network. Proc. Pro-ceedings of the IEEE, 122(2): 387–401.
Fang H, Zhang J & Gao J (2010) Optimal operation of multi-storage tank multi-source systembased on storage policy. Journal of Zheijang University - SCIENCE A 11(8): 571–578.
Feldman M (2009) Aspects of energy efficiency in water supply systems. Proc. Proceedings ofthe Fifth IWA Water Loss Reduction Specialist Conference, Morgan Kaufmann Publishers,85–89.
Fuzy O (1991) Áramlástechnikai gépek és rendszerek, 229–289. Tankönyvkiadó. (in Hungarian).Georgia VC & Chen VCP (1995) Discretizing the state space for high-dimensional continuous-
state stochastic dynamic programs. Technical report, Mathematics of Operations Research.GLPK (2012) Gnu linear programming kit. http://www.gnu.org/software/glpk/.Goldberg DE (1989) Sizing Populations for Serial and Parallel Genetic Algorithms. Proc. Schaf-
fer DJ (ed) Proceedings of the Third International Conference on Genetic Algorithms, Mor-gan Kaufmann Publishers, 70–79.
149

Goldberg DE, H C & Kuo (1987) Genetic algorithms in pipeline optimization. Journal of Com-puting in Civil Engineering 1(2): 128–141.
Goryashko A & Nemirovski A (2011) Robust energy cost optimization of water distribution sys-tem with uncertain demand. Department of Applied Mathematics, Moscow State Universityof Printing Arts .
Halász G, Kristóf G & Kullmann L (2002) Áramlas csohálózatokban. (Flow in pipe networks).Muegyetemi kiadó. (in Hungarian).
Hall WA (1970) Optimal state dynamic programming for multireservoir hydroelectric systems.Technical report, Department of Civil Engineering, Colorado State University, Fort Collins,Colorado.
Harvey I & Thompson A (1996) Through the labyrinth evolution finds a way: A silicon ridge.Proc. First International Conference on Evolvable Systems: From Biology to Hardware,Springer–Verlag, Berlin, Heidelberg, New York, 406–422.
Hos C & Bene J (2010) Szivattyúzási rendszerek üzemvitel-optimalizációja. Szivattyúk, kom-presszorok, vákuumszivattyúk 17(1): 57–60.
Holland JH (1975) Adaptation in natural and artificial systems. University of Michigan Press.I Sarbû GO (2008) Energetical optimization of water distribution systems in large urban centers.
Periodica Polytechnica Mechanical Engineering 52(2): 93–103. Doi:10.3311/pp.me.2008-2.09.
Ikonen E & Bene J (2010) Optimal control of pumps in a water distribution network under de-mand uncertainties. Proc. 51st International Conference of Scandinavian Simulation Society,Oulu, Finland.
Ikonen E & Bene J (2011) Scheduling and disturbance control of a water distribution network.Proc. 18th World Congress of the International Federation of Automatic Control (IFAC 2011),Milano, Italy.
Ikonen E, Selek I & Bene J (2012) Optimization of pumping schedules using the genealogicaldecision tree approach. Chemical Product and Process Modelling 7(1): 1–25.
Ikonen E, Selek I & Tervaskanto M (2010) Short-term pump schedule optimization using mdpand neutral ga. Proc. IFAC Conference on Control Methodologies and Technology for EnergyEfficiency (CMTEE 2010), Vilamoura, Portugal. Doi:10.3182/20100329-3-PT-3006.00057.
Jamieson DG, Shamir U, Martinez F & Franchini M (2007) Conceptual design of a generic, real–time, near–optimal control system for water–distribution networks. Journal of Hydroinfor-matics 9(1): 3–14.
Jensen PA & Bard JF (2003) Operations research: models and methods. Wiley.Doi:10.2307/2344020.
Joalland G & Cohen G (1980) Optimal control of a water distribution network by two multilevelmethods. Automatica 16(1): 83–88.
Jowitt PW & Germanopoulos G (1992) Optimal pump scheduling in water-supply networks. Jour-nal of Water Resources Planning and Management 118(4): 406–422.
Kadu M, Gupta R & Bhave P (2008) Optimal design of water networks using modified geneticalgorithm with reduction in search space. Journal of Water Resources Planning and Manage-ment 134(2): 147–160. Doi:10.1061/(ASCE)0733-9496(2008)134:2(147) (14 pages).
Katko T & Juuti S (2007) Watering the city of tampere from the mid-1800s to the 21th century.Technical report, Tampere Water and International Water History Association.
Khrisnakumar K (1989) Micro-genetic algorithms for stationary and non-stationary function op-timization. Proc. SPIE Proceedings: Intelligent Control and Adaptive Systems, 289–296.
150

Koncsos L & Balogh E (2010) A simulation-optimisation methodology for designing the op-eration of emergency reservoirs in the hungarian tisza basin. Periodica Polytechnica CivilEngineering 54(2): 101–106. 10.3311/pp.ci.2010-2.05.
Kullmann L (1999) Üzemirányító algoritmus és programcsomag az Északi víztermelo területszámára. Technical Report 1024, Budapesti Muszaki Egyetem, Vízgépek Tanszék. (in Hun-garian).
Kullmann L (2004) Üzemirányító programrendszer tervezése és megvalósítása regionálisvízmuhálózat optimális üzemeltetéséhez. Technical Report 1063, Budapesti Muszaki és Gaz-daságtudományi Egyetem, Hidrodinamikai Rendszerek Tanszék. (in Hungarian).
Kumar DN & Baliarsingh F (2003) Folded dynamic programming for optimal operation of mul-tireservoir system. Water Resources Management 17: 337–353.
Kumar DN, Baliarsingh F & Raju KS (2010) Optimal reservoir operation for flood con-trol using folded dynamic programming. Water Resources Management 24: 1045–1046.Doi:10.1007/s11269-009-9485-3.
Labadie JW (2004) Optimal operation of multireservoir systems: State–of–the–art re-view. Journal of Water Resources Planning and Management 130(2): 93–111.Doi:10.1061/(ASCE)0733-9496(2004)130:2(93) (19 pages).
Land AH & Doig AG (1960) An automatic method of solving discrete programming problems.Econometrica 28(3): 497–520.
Lauria DT (2004) Discussion of "Cost models for water supply distribution systems" by Robert M.Clark, Mano Sivaganesan, Ari Selvakumar, and Virendra Sethi. Journal of Water ResourcesPlanning and Management 130(4): 353–355.
Lehre PK & Haddow PC (2005) Accesibility between Neutral Networks in Indirect Genotype–Phenotype Mappings. Proc. IEEE Congress on Evolutionary Computation, 1: 419–426.
Leon C, Martin S, Elena JM & Luque J (2000) EXPLORE – Hybrid Expert System for WaterNetwork Management. Journal of Water Resources Planning and Management 162(2): 65–74.
López-Ibáñez M, Prasad TD & Paechter B (2011) Representations and evolutionary operators forthe scheduling of pump operations in water distribution networks. Evolutionary Computing19(3): 429–467.
Ma Z & Wang S (2009) Energy efficient control of variable speed pumps in complex buildingcentral air-conditioning systems. Energy and Buildings 41: 197–205.
Mackle G, Savic DA & Walters GA (1995) Application of genetic algorithms to pump schedul-ing for water supply. Proc. Genetic Algorithms in Engineering Systems: Innovations andApplications, GALESIA ’95, Sheffield, U.K., 400–405.
Martinez L & Soares S (2002) Comparison between closed-loop and partial open-loop feedbackcontrol policies in long-term hydrothermal scheduling. IEEE Transactions on Power Systems17(2).
Matoušek J & Gärtner B (2007) Understanding and Using Linear Programming. Springer–Verlag.ISBN:3540306978.
Mays LM (1999) Water distribution systems handbook. McGraw-Hill Handbooks.McCormick G & Powell RS (2003) Optimal Pump Scheduling in Water Supply Systems with
Maximum Demand Charges. Journal of Water Resources Planning and Management 129(5):372–379.
Mezura-Montesa E & Coello CAC (2011) Constraint-handling in nature-inspired numerical opti-mization: Past, present and future. Swarm and Evolutionary Computation 1(4): 173–194.
151

Michalewitz Z & Schoenauer M (1996) Evolutionary algorithm for constrained parameter opti-mization problems. Evolutionary Computation 4(1): 1–32.
Morales AK (1998) A Universal Eclectic Genetic Algorithm for Constrained Optimization. Proc.6th European Congress on Intelligent Techniques and Soft Computing, EUFIT’98, VerlagMainz, Aachen, Germany, 518–522.
Mousavi SJ, Karamouz M & Menhadj MB (2004) Fuzzy-state stochastic dynamic programmingfor reservoir operation. Journal of Water Resources Planning and Management 130(6): 460–470. Doi:10.1061/(ASCE)0733-9496(2004)130:6(460) (11 pages).
Máttyus S (1987) Vízellátás 3. Fovárosi Vízmuvek belso tananyag. (in Hungarian).Mühlenbein H & Schlierkamp–Voosen D (1993) Predictive Models for Breeder Genetic Algo-
rithm I. Continuous parameter optimization. Evolutionary Computation 1(1): 25–49.NEOS (2012) Server for optimization. http://www.neos-server.org/neos/.Nicklow J, Reed P & Savic D (2010) State of the art for genetic algorithms and beyond in water
resources planning and management. Journal of Water Resources Planning and Management136(4): 412–432.
Niederreiter H & Xing C (1995) Low-discrepancy sequences obtained from algebraic functionfields over finite fields. Acta Arithmetica 72(3): 281–298. Doi:10.1006/ffta.1996.0016.
Niederreiter H & Xing C (1996) Low-discrepancy sequences and global function fieldswith many rational places. Finite Fields and Their Applications 2(3): 241–273.Doi:10.1006/ffta.1996.0016.
Nitivattananon V, Sadowski EC & Quimpo RG (1996) Optimization of Water Supply SystemOperation. Journal of Water Resources Planning and Management 122(5): 374–384.
Ormsbee LE & Lansey KE (1994) Optimal control of water supply pumping systems. Journal ofWater Resources Planning and Management 120(2): 39–47.
Ormsbee LE & Reddy SL (1995) Nonlinear heuristic for pump operations. Journal of WaterResources Planning and Management 121(4): 302–309.
Ormsbee LE, Walski TM, Chase DV & Sharp WW (1989) Methodology for improving pumpoperation efficiency. Journal of Water Resources Planning and Management 115(2): 148–164.
Ostfeld A & Tubaltzev A (2008) Ant Colony Optimization of Least–Cost Design and Operationof Pumping Water Distribution Systems. Journal of Water Resources Planning and Manage-ment 134(2): 107–118.
Powell D & Skolnick MM (1989) Using genetic algorithms in engineering design optimizationwith nonlinear constraints. Proc. Forrest S (ed) Proceedings of the Fifth International Confer-ence on Genetic Algorithms, University of Illinois at Urbana-Campaign, Morgann KaufmannPublishers, 421–431.
Powell WB (2007) Approximate Dynamic Programming: Solving the Curses of Dimensionality.John Wiley and Sons.
Press WH, Teukolsky SA, Vetterling WT & Flannery BP (2007) Numerical Recipes 3rd Edition:The Art of Scientific Computing. Cambridge University Press.
Raabe J (1970) Hydraulische Maschinen und Anlagen, Teil 3, Pumpen. VDI-Verlag GmbH. (InGerman.).
Rao Z & Alvarruiz F (2007) Use of an artificial neural network to capture the domain knowledgeof a conventional hydraulic simulation model. Journal of Hydroinformatics 9(1): 15–24.
Rao Z & Salomons E (2007) Development of a real-time, nearoptimal control process for water-distribution networks. Journal of Hydroinformatics 9(1): 25–37.
152

Rishel JB (2001) Wire-to-water efficiency of pumping systems. ASHRAE Journal 40–46.Rothlauf F (2006) Representations for Genetic and Evolutionary Algorithms. Springer-Verlag
Berlin Heidelberg, second edition. ISBN-13 978 3 540 25059 3.Rust J (1997) Using randomization to break the curse of dimensionality. Econometrica 65(3):
487–516. Doi:10.2307/2171751.Sabet MH & Helweg OJ (1985) Cost effective operation of urban water supply system us-
ing dynamic programming. Water Resources Bulletin 21(1): 75–81. Doi:10.1111/j.1752-1688.1985.tb05353.x.
Sakarya A & Mays L (2000) Optimal operation of water distribution pumps considering waterquality. Journal of Water Resources Planning and Management 126(4): 210–220.
Salgado R, Todini E & O’Connel P (1988a) Computer applications in water supply, volume 1,chapter Comparison of the gradient method with some traditional methods for the analysisofwater supply distribution networks, 38–62. Research Studies Press Ltd.
Salgado R, Todini E & O’Connell PE (1988b) Comparison of the gradient method with sometraditional methods for the analysisof water supply distribution networks, volume 1, 38–62.Research Studies Press Ltd.
Savic A & Walters GA (1997) Genetic Algorithms for Least Cost Design of Water DistributionNetworks. Journal of Water Resources Planning and Management 123(2): 67–77.
Savic DA, Walters GA & Schawb M (1997) Multi-objective genetic alghorithms for pumpscheduling in water supply. Technical report, Exeter, UK, Stuttgart, Germany.
Selek I (2009) Novel evolutionary methods in engineering optimization - towards robustness andefficiency. Dissertation, University of Oulu.
Selek I, Bene JG & Hõs C (2012) Optimal (short-term) pump schedule detection for water distri-bution systems by neutral evolutionary search. Applied Soft Computing 12(8): 2336–2351.
Shamir U & Salomons E (2008) Optimal real-time operation of urban water distribution systemsusing reduced models. Journal of Water Resources Planning and Management 134(2): 181–185.
Simpson AR, Dandy GC & Murphy LJ (1994) Genetic algorithms compared to other techniquesfor pipe optimization. Journal of Water Resources Planning and Management 120(4): 423–443.
Stedinger JR, Sule BF & Loucks DP (1984) Stochastic dynamic programming models for reser-voir operation optimization. Water Resources research 20(11): 1499.
Tang B (1993) Orthogonal array-based latin hypercubes. Journal of the American StatisticalAssociation 88(424): 1392–1397. Doi:10.2307/2291282.
Tilmant A, Vanclooster M, Duckstein L & Persoons E (2002) Comparison of fuzzy and nonfuzzyoptimal reservoir operating policies. Journal of Water Resources Planning and Management128(6): 390–398. Doi:10.1061/(ASCE)0733-9496(2002)128:6(390) (9 pages).
Todini E & Pilati S (1988) A gradient algorithm for the analysis of pipe networks, volume 1,1–20. Research Studies Press Ltd.
Tolnai B et al. (1995) Vízmuvek optimális irányítása. Fovárosi Vízmuvek belso tananyag. (inHungarian).
Tu M, Tsai F & Yeh W (2005) Optimization of water distribution and water quality by hybridgenetic algorithm. Journal of Water Resources Planning and Management 131(6): 431U440.
Turgeon A (1981) A decomposition method for the long–term scheduling of reservoirs in series.Water Resources Research 17(6): 1565–1570.
153

Ulanicki B, Kahler J & See H (2007) Dynamic optimization approach for solving an optimalscheduling problem in water distribution systems. Journal of Water Resources Planning andManagement 133(1): 23–32.
Ulanicki B, Rance JP, Davis D & Chen S (1993) Computer-aided optimal pump selection forwater distribution networks. Journal of Water Resources Planning and Management 119(5):542–562.
Vamvakeridou-Lyroudia L, Walters G & Savic D (2005) Fuzzy multiobjective optimization ofwater distribution networks. Journal of Water Resources Planning and Management 131(6):467–476.
Wallbom-Carlson A (1998) Energy comparison vfd vs. on-off controlled pumping stations. Sci-entific Impeller 136(5): 29–32. ITT Flygt AB, Solna, Sweden.
Wang J, Chang T & Chen J (2009) An enhanced genetic algorithm for bi-objective pump schedul-ing in water supply. Expert Systems with Applications 36: 10249–10258.
Wang Y, Chai Z, Zhou Y & Zheng W (2008) An Adaptive Tradeoff Model for ConstrainedEvolutionary Optimization. IEEE Transactions on Evolutionary Computation 12(1): 80–92.
Whitley LD (1989) The genitor algorithm and selection pressure: Why rank-based allocationof reproductive trials is best. Proc. Schaffer DJ (ed) Proceedings of the 3rd InternationalConference on Genetic Algorithms, Morgann Kaufmann Publishers, 116–121.
Wylie EB, Streeter VL & Suo L (1993) Fluid transients in systems. Prentice Hall.Zyl JE, Savic DA & Walters GA (2004) Operational Optimization of Water Distribution Systems
Using Hybrid Genetic Algorithm. Journal of Water Resources Planning and Management130(2): 160–170.
154

Appendix 1 Test networks
1.1 Artificial networks
1.1.1 Small Sopron
The topology of the Small Sopron network is depicted in Fig. 39. This is an artificialnetwork inspired by the real Sopron network, which means that the modelling propertiesare similar but the size of the network is much smaller. The network contains twodiscrete pumps and one variable speed well pump, the energy consumption of the latteris negligible. Hydraulic simulation is not needed, the operation points are known apriori. For details about the modelling see level VWM and FDM in Section 1.4.2.
The network has two realisations. In the first case the well flow rate is set to be330m3/h fixed value and in the other case it is modelled as a floating point variablewithin the interval [0,500]m3/h. Then an additional constraint appears: the flow rate ofthe well can be changed only 4 times within a day due to technological reasons. Dueto practical considerations, these time instances were chosen the same when the energytariff is changing.
PowerStation
WaterReservoir (0)
WaterSource
WaterReservoir (1)
WaterReservoir (2)
Pump (0)
Pump (1)
Node (0)
Node (2)
Node (1)
WaterDemand (0)
WaterDemand (1)
Wellpump
Constant speed pump (discrete flow rate,pump without frequency converter)
Variable speed pump (continuous flow rate,pump with frequency converter)
Main distribution network Well field
Fig 39. Small Sopron sample network.
155

The operational data of the test network is summarised by the following tables.As an optimal control problem, the one-day (24h) optimal pumping policy of the testnetwork is investigated on an hourly basis (T = 24, Δt = 1h). The operational constrainton power station restricts the energy supply which can not exceed 300 [kWh] on theoptimisation time horizon.
The reservoir limits are constant during the day, except the last period where themaximum differences Δv−(i) and Δv+(i) from the initial water level are prescribed.
Table 18. Flow rate and consumed power values of the constant speed pumps.
operating point q0 p0 q1 p1
identifier [m3/h] [kW] [m3/h] [kW]
0 0 0 0 0
1 100 55 320 110
2 420 110 550 220
Table 19. Minimum and maximum limits of the reservoirs. (The values with * were changedfor the different optimisation tasks.)
i vmin(0...23, i) vmax(0...23, i) v(0, i) Δv−(i) Δv+(i)
(reservoir) [m3] [m3] [m3] [m3] [m3]
0 *100 2000 1700 *100 100
1 100 3600 200 100 100
2 100 2000 1800 100 100
156

Table 20. Water demand data and energy tariff.
t 0 1 2 3 4 5 6 7 8 9 10 11
d(t,0) [m3] 35 15 14 24 29 39 53 65 65 55 52 53d(t,1) [m3] 196 81 76 133 165 216 296 362 363 308 292 295r(t) [e/kWh] 1 1 1 1 1 1 1 1 2 2 2 2
t 12 13 14 15 16 17 18 19 20 21 22 23
d(t,0) [m3] 61 60 53 53 57 59 60 72 71 69 52 34d(t,1) [m3] 343 334 298 296 319 330 336 403 398 384 288 189r(t) [e/kWh] 2 2 1 1 1 1 2 2 2 1 1 1
Water network optimisation as combinatorial problem
For an illustrative example the control model of the network (when the well is fixed) isdetailed in the following. The system evolves according to
x(t +1) = x(t)+
⎛⎜⎝ −1 0
1 −10 1
⎞⎟⎠u(t)−d(t), (112)
where x(0) = (1700, 200, 1800)T , d(t) = (−330, d(t,0), d(t,1))T and
u(t) =
(u(t,0) ∈ {0,110,420}u(t,1) ∈ {0,320,550}
). (113)
The goal is to minimise the total cost of the operation
TC =23∑
t=0[ (6.40 ·10−1)u(t,0)− (9.00 ·10−4)u2(t,0)+
+ (3.16 ·10−1)u(t,1)+(8.65 ·10−5)u2(t,1)]r(t)(114)
subject to reservoir constraints
xmin(t)≤ x(t)≤ xmax(t) (115)
and energy supply limitation:
(6.40 ·10−1)u(t,0)− (9.00 ·10−4)u2(t,0)++ (3.16 ·10−1)u(t,1)+(8.65 ·10−5)u2(t,1)≤ 300.
(116)
Functions (114) and (116) were derived using second order interpolation on correspond-ing data pairs summarised by Table 18.
157

Waterreservoir
Watersource
Node
Water demandPipe
network
Pumpα
Fig 40. Sample network for reservoir filling.
1.1.2 Single tank network
This network is used exclusively for Chapter 5, the topology is depicted in Fig. 40and takes into account the full hydraulics. The network is an artificial network whichconsists of a variable speed pump, a pipe network characterised by one edge equation,and a tank for storing water or any liquid thus it can model a WDS of any small villageor the tank filling of any other industrial process. The network was investigated over ahuge parameter space which can also be found in Chapter 5.
158

Table 21. Consumption weights for the Single tank network in the case of the 24h longschedule. The numbers tell us how much percent of the daily average flow rate is set in theparticular time periods.
Time Weight Time Weight Time Weight Time Weight Time Weight
00:00 37.24 04:48 47.64 09:36 157.58 14:24 119.55 19:12 133.7700:06 36.41 04:54 49.15 09:42 157.07 14:30 118.76 19:18 134.0400:12 35.59 05:00 50.66 09:48 156.57 14:36 117.97 19:24 134.3000:18 34.77 05:06 53.62 09:54 156.06 14:42 117.18 19:30 134.5600:24 33.95 05:12 56.58 10:00 155.55 14:48 116.39 19:36 134.8200:30 33.12 05:18 59.54 10:06 154.65 14:54 115.60 19:42 135.0800:36 32.30 05:24 62.51 10:12 153.74 15:00 114.81 19:48 135.3500:42 31.48 05:30 65.47 10:18 152.83 15:06 114.62 19:54 135.6100:48 30.66 05:36 68.43 10:24 151.92 15:12 114.42 20:00 135.8700:54 29.83 05:42 71.39 10:30 151.01 15:18 114.22 20:06 133.7901:00 29.01 05:48 74.35 10:36 150.10 15:24 114.02 20:12 131.7101:06 28.78 05:54 77.32 10:42 149.19 15:30 113.83 20:18 129.6301:12 28.55 06:00 80.28 10:48 148.28 15:36 113.63 20:24 127.5501:18 28.32 06:06 84.59 10:54 147.37 15:42 113.43 20:30 125.4601:24 28.09 06:12 88.91 11:00 146.46 15:48 113.23 20:36 123.3801:30 27.86 06:18 93.22 11:06 145.98 15:54 113.04 20:42 121.3001:36 27.63 06:24 97.54 11:12 145.50 16:00 112.84 20:48 119.2201:42 27.40 06:30 101.86 11:18 145.02 16:06 112.53 20:54 117.1401:48 27.17 06:36 106.17 11:24 144.53 16:12 112.23 21:00 115.0601:54 26.94 06:42 110.49 11:30 144.05 16:18 111.92 21:06 112.0702:00 26.71 06:48 114.80 11:36 143.57 16:24 111.61 21:12 109.0802:06 26.75 06:54 119.12 11:42 143.09 16:30 111.31 21:18 106.0902:12 26.79 07:00 123.43 11:48 142.60 16:36 111.00 21:24 103.1002:18 26.82 07:06 126.48 11:54 142.12 16:42 110.70 21:30 100.1102:24 26.86 07:12 129.53 12:00 141.64 16:48 110.39 21:36 97.1202:30 26.90 07:18 132.57 12:06 140.76 16:54 110.09 21:42 94.1302:36 26.94 07:24 135.62 12:12 139.88 17:00 109.78 21:48 91.1402:42 26.98 07:30 138.67 12:18 139.00 17:06 110.61 21:54 88.1502:48 27.02 07:36 141.72 12:24 138.12 17:12 111.45 22:00 85.1602:54 27.06 07:42 144.76 12:30 137.24 17:18 112.28 22:06 81.7903:00 27.10 07:48 147.81 12:36 136.36 17:24 113.11 22:12 78.4103:06 27.94 07:54 150.86 12:42 135.48 17:30 113.95 22:18 75.0403:12 28.79 08:00 153.90 12:48 134.60 17:36 114.78 22:24 71.6603:18 29.63 08:06 154.58 12:54 133.72 17:42 115.62 22:30 68.2803:24 30.48 08:12 155.25 13:00 132.84 17:48 116.45 22:36 64.9103:30 31.33 08:18 155.92 13:06 131.83 17:54 117.28 22:42 61.5303:36 32.17 08:24 156.59 13:12 130.82 18:00 118.12 22:48 58.1603:42 33.02 08:30 157.26 13:18 129.80 18:06 119.63 22:54 54.7803:48 33.87 08:36 157.93 13:24 128.79 18:12 121.14 23:00 51.4103:54 34.71 08:42 158.60 13:30 127.78 18:18 122.66 23:06 49.9904:00 35.56 08:48 159.27 13:36 126.76 18:24 124.17 23:12 48.5704:06 37.07 08:54 159.94 13:42 125.75 18:30 125.68 23:18 47.1504:12 38.58 09:00 160.61 13:48 124.74 18:36 127.20 23:24 45.7404:18 40.09 09:06 160.10 13:54 123.72 18:42 128.71 23:30 44.3204:24 41.60 09:12 159.60 14:00 122.71 18:48 130.22 23:36 42.9004:30 43.11 09:18 159.09 14:06 121.92 18:54 131.74 23:42 41.4904:36 44.62 09:24 158.59 14:12 121.13 19:00 133.25 23:48 40.0704:42 46.13 09:30 158.08 14:18 120.34 19:06 133.51 23:54 38.65
159

1.2 Real water distribution systems
The energy prices used in this work are scaled due to industrial request, however, theratio of the cheap and expensive periods remained the same.
1.2.1 Sopron
The water distribution system of Sopron was first reported by Kullmann (2004) andsupplies 120 thousands of residential consumers (60 thousand in Sopron and the latterpart in the suburban) and several industrial partners. The network contains 7 discretepumps and 3 variable speed well pumps, the energy consumption of the latter onesare negligible. Hydraulic simulation is not needed, because the hilly terrain of Soprondetermines the operational points of the pumps which can be computed a priori. Fordetails about the modelling see level VWM in Section 1.4.2. As an optimal controlproblem, the one-day (24h) optimal pumping policy of the test network is investigatedon an hourly basis (T = 24, Δt = 1h).
On the optimisation time horizon there are two energy consumption charging peri-ods considered which are shown in Table 26. The energy charging periods determine theoperational constraints of the variable speed pumps as well. For these pumps, switchingbetween operating points is allowed only at charging period boundaries. The initial flowrates qinit must be kept until the first possibility of change. There are also exploitationlimits for the wells which are shown in Table 23.
Constant speed pump data including the operating point identifier, correspondingflow rates, and power consumptions are summarised by Table 22. The upper power lim-its for power stations can vary during the day according to the billing periods. Typicallythese limits are higher in the cheaper charging periods as Table 27 indicates.
The reservoir limits are constant during the day, except the last period when themaximum negative difference Δv−(i) from the initial water level is prescribed. Thereservoir data is given in Table 24 while the initial water levels for different scenariosare summarised in Table 25.
160

WaterReservoir (0)
Well 2
Pump (0)
Pump (1)
Pump (2)
Pump (3)
Pump (5) Pump (4)
Pump (6)
Pump (7)
Node (0)
WaterDemand
D4
PowerStation (0)
WaterReservoir (1)
WaterReservoir (2)
WaterReservoir (3)
WaterReservoir (5)
WaterReservoir (4)
WaterReservoir (6)
WaterReservoir (7)
PowerStation (4)
PowerStation (1)
PowerStation (2)
PowerStation (3)
Well 1
Well 0
Well 3W3
WaterDemand
D5
WaterDemand
D6
WaterDemand
D7
WaterDemand
D8
Node (1)
Node (2)
Node (5)
Node (4)
Node (6)
Node (7)
Node (3)
Well 4
Wellpump (1)
Wellpump (2)
Wellpump (0)
Constant speed pump(discrete flow rate,
pump withoutfrequency inverter)
Variable speed pump(c
equipped withfrequency inverter)
ontinuous flow rate,pump
Discrete flowinput / output
Well field (2)
Well field (0)
Well field (2)
Well field (1)
Main distributionsystem
Fig 41. Water distribution system of Sopron. (Bene et al. 2013, published by permission ofIWA Publishing).
161

Table 22. Pump data.
operating point q0 p0 q1 p1 q2 p2 q3 p3
identifier [m3/h] [kW] [m3/h] [kW] [m3/h] [kW] [m3/h] [kW]
0 0 0 0 0.0 0 0 0 0
1 150 50 110 5.5 270 30 550 210
2 360 125 - - 500 60 - -
3 - - - - - - - -
operating point q4 p4 q5 p5 q6 p6 q7 p7
identifier [m3/h] [kW] [m3/h] [kW] [m3/h] [kW] [m3/h] [kW]
0 0 0.0 0 0.0 0 0.0 0 0
1 66 18.7 66 3.8 90 4.8 72 24
2 116 37.5 118 7.4 114 9.2 130 46
3 - - 148 10.6 - - - -
Table 23. Well pump data.
qinit (m3/h) qmax (m3/h) vwellmin (m3) vwell
max (m3)
Well pump (0) 253 270 3000 6000
Well pump (1) 72 250 1000 3000
Well pump (2) 179 460 5000 11000
162

Table 24. Reservoir limitation data.
i vmin(0...23, i) vmax(0...23, i) Δv−(i) Δv+(i)
(reservoir) [m3] [m3] [m3] [m3]
0 200.0 500.0 50.0 ∞
1 0.0 1,000.0 30.0 ∞
2 1,008.0 2,000.0 200.0 ∞
3 983.6 1,901.6 200.0 ∞
4 1,784.0 3,766.0 300.0 ∞
5 2,500.0 4,950.0 500.0 ∞
6 930.0 2,132.0 140.0 ∞
7 620.7 1,179.0 120.0 ∞
Table 25. Initial water level configurations.
Configuration number
Reservoirs 1 2 3 4 5 6 7 8 9 10
v(0,0) 391 435 277 284 396 279 265 374 317 350v(0,1) 498 510 479 501 496 508 511 499 503 500v(0,2) 1,226 1,310 1,162 1,380 1,128 1,327 1,209 1,273 1,279 1,496v(0,3) 1,370 1,459 1,629 1,793 1,665 1,616 1,741 1,377 1,514 1,442v(0,4) 2,210 2,188 2,174 2,085 1,790 1,865 2,041 2,416 2,086 2,775v(0,5) 3,783 3,425 3,558 3,715 3,883 3,533 3,525 3,733 3,691 3,766v(0,6) 1,345 1,410 1,336 1,280 1,302 1,308 1,277 1,298 1,268 1,531v(0,7) 989 910 918 864 889 930 1,021 918 803 900
163

Table 26. Water demand data and energy tariff.
t 0 1 2 3 4 5 6 7
W3 = d(t,3) [m3] 66.0 66.0 66.0 66.0 66.0 66.0 66.0 66.0D4 = d(t,4) [m3] 31.0 30.2 9.6 17.7 47.0 23.6 38.3 51.1D5 = d(t,5) [m3] 126.8 154.7 102.0 127.1 155.1 135.3 229.5 336.3D6 = d(t,6) [m3] 136.1 164.2 70.7 82.9 65.3 138.9 217.5 141.5D7 = d(t,7) [m3] 34.0 26.1 23.2 26.3 17.3 32.9 55.1 68.2D8 = d(t,8) [m3] 30.9 23.5 19.1 20.0 25.1 32.3 51.3 77.5r(t) [e/kWh] 1 1 1 1 1 1 1 1.25
t 8 9 10 11 12 13 14 15
W3 = d(t,3) [m3] 66.0 66.0 66.0 66.0 66.0 66.0 66.0 66.0D4 = d(t,4) [m3] 71.3 49.7 52.6 61.4 62.1 71.0 42.9 41.7D5 = d(t,5) [m3] 384.8 370.4 339.5 311.3 415.2 434.7 416.5 408.1D6 = d(t,6) [m3] 139.5 129.9 127.0 104.3 76.5 122.7 104.0 156.7D7 = d(t,7) [m3] 64.2 63.3 56.1 63.3 54.0 48.5 51.5 54.2D8 = d(t,8) [m3] 117.3 132.9 126.6 117.5 109.7 99.4 89.0 80.3r(t) [e/kWh] 1.25 1.25 1.25 1.25 1.25 1 1 1
t 16 17 18 19 20 21 22 23
W3 = d(t,3) [m3] 66.0 66.0 66.0 66.0 66.0 66.0 66.0 66.0D4 = d(t,4) [m3] 42.4 86.5 55.8 63.2 54.8 50.0 26.5 42.8D5 = d(t,5) [m3] 312.2 330.0 356.4 412.2 382.7 329.3 245.7 196.9D6 = d(t,6) [m3] 141.4 78.2 121.1 110.5 101.6 112.8 137.2 49.8D7 = d(t,7) [m3] 61.5 64.4 62.1 70.4 67.1 53.4 34.8 32.3D8 = d(t,8) [m3] 86.8 83.5 95.7 106.2 100.8 90.3 69.0 45.3r(t) [e/kWh] 1 1.25 1.25 1.25 1 1 1 1
Table 27. Power limits during charging periods pmax[kW].
Power station (0) (1) (2) (3) (4)
Cheap periods 162 10 525 70 70
Expensive periods 162 10 310 35 70
164

1.2.2 Szokolya–Királyrét–Kóspallag
Szokolya, Királyrét and Kóspallag villages are situated in the Börzsöny mountains inNorthern Hungary. The total number of the inhabitants is about 3400 people, however,the region is also a very popular tourist destination. Due to the mountains, there are 4different pressure zones in the water network, and the operation points of the pumps aremainly determined by the geodetic height differences thus they are known a priori. Thenetwork contains four discrete pumps and one variable speed well pump, the energyconsumption of the latter is negligible. For details about the modelling see level VWMand FDM in Section 1.4.2.
The flow rate of the well can be changed only 3 times within a day due to techno-logical reasons: at 7 a.m., 2 p.m. and 9 p.m., and the maximum allowed flow rate to beset is 80 m3/h. The initial flow rate is 60 m3/h.
The operational data of the test network is summarised by the following tables.As an optimal control problem, the one-day (24h) optimal pumping policy of the testnetwork is investigated on a 30-minute basis (T = 48, Δt = 0.5 h). The operationalconstraint on power station restricts the energy supply which can not exceed 40 [kWh]on the optimisation time horizon.
The reservoir limits are constant during the day, except the last period, when themaximum negative differences Δv−(i) from the initial water levels are prescribed.
WaterReservoir (0)
Pump (3)
Node (4)
WaterReservoir (3)
Pump (2)
Node (3)
WaterReservoir (2)
Pump (1)
Node (2)
WaterReservoir (4)
WaterReservoir (1)
Pump (0)
Node (1)
WaterReservoir (0)
Well pmp
Node (0)
WaterSource
PowerStation
Constant speed pump (discrete flow rate,pump without frequency converter)
Variable speed pump (continuous flow rate,pump equipped with frequency converter)
WaterDemand (0)
WaterDemand (1)
WaterDemand (2)
WaterDemand (3)
Maindistribution
network
Wellfield
Fig 42. Water network of Szokolya.
165

Table 28. Flow rate and consumed power values of the constant speed pumps.
operating point q0 p0 q1 p1 q2 p2 q3 p3
identifier [m3/h] [kW] [m3/h] [kW] [m3/h] [kW] [m3/h] [kW]
0 0 0 0 0 0 0 0 0
1 109 28 95 24 30 6 29 14
2 - - - - 62 16 - -
Table 29. Minimum and maximum limits of the reservoirs.
i vmin(0...23, i) vmax(0...23, i) v(0, i) Δv−(i) Δv+(i)
(reservoir) [m3] [m3] [m3] [m3] [m3]
0 100 250 170 0 ∞
1 120 187 131 0 ∞
2 343 460 383 0 ∞
3 256 369 302 0 ∞
4 223 343 281 0 ∞
166

Table 30. Water demand data and energy tariff.
t 0 1 2 3 4 5 6 7 8 9 10 11
d(t,0) [m3] 2.13 6.01 4.06 4.11 2.85 4.29 0.00 1.95 3.13 3.50 4.05 3.58d(t,1) [m3] 3.67 3.70 4.74 2.32 5.80 0.00 6.99 5.25 3.84 3.44 5.89 8.20d(t,2) [m3] 1.14 3.22 0.00 2.17 2.89 2.64 2.85 0.00 2.49 3.30 2.94 3.88d(t,3) [m3] 1.80 0.00 3.00 0.98 5.04 3.87 0.60 2.58 2.97 3.05 2.93 3.18r(t) [e/kWh] 14 14 14 14 14 14 14 14 14 14 14 14
t 12 13 14 15 16 17 18 19 20 21 22 23
d(t,0) [m3] 3.39 4.70 8.35 5.51 6.01 4.05 3.07 3.07 3.37 4.64 3.49 3.54d(t,1) [m3] 5.84 9.35 5.92 6.45 7.30 6.78 5.68 6.32 4.95 8.28 4.72 4.33d(t,2) [m3] 3.57 3.99 3.88 3.52 4.31 4.45 4.49 4.62 1.66 2.69 4.49 0.00d(t,3) [m3] 2.58 3.05 3.15 2.87 2.55 7.20 3.88 4.34 5.21 1.93 3.45 3.54r(t) [e/kWh] 14 14 20 20 20 20 20 20 20 20 20 20
t 24 25 26 27 28 29 30 31 32 33 34 35
d(t,0) [m3] 3.70 3.78 5.20 2.74 2.30 5.51 3.37 5.66 5.05 4.36 5.80 0.00d(t,1) [m3] 10.66 4.26 5.36 7.13 2.80 7.61 3.81 3.73 3.96 2.82 5.20 7.05d(t,2) [m3] 2.53 3.43 3.78 7.01 1.63 4.89 4.25 0.00 7.09 0.00 3.06 3.05d(t,3) [m3] 2.04 3.30 2.30 3.13 1.18 3.36 3.61 1.93 1.98 3.48 3.52 4.31r(t) [e/kWh] 20 20 20 20 20 20 20 20 20 20 20 20
t 36 37 38 39 40 41 42 43 44 45 46 47
d(t,0) [m3] 6.30 3.37 4.30 3.49 4.39 3.40 4.05 3.07 3.07 0.32 6.75 3.90d(t,1) [m3] 4.11 8.68 7.89 9.91 6.45 7.30 6.78 5.68 6.32 4.89 2.51 3.44d(t,2) [m3] 2.93 3.18 2.58 3.05 0.00 11.05 7.47 5.72 3.94 3.18 0.80 6.74d(t,3) [m3] 4.45 4.49 4.62 5.03 4.03 3.80 3.69 3.31 2.73 3.24 2.52 1.93r(t) [e/kWh] 20 20 20 20 20 20 14 14 14 14 14 14
167

1.2.3 Waterworks of Budapest
The waterworks of Budapest supplies almost 2 million residential consumers and sev-eral factories all around the Hungarian capital. The waterworks consist of 8 differentpressure zones, however, those pumps consume 90% of the energy which are located inthe Central zone and the so called East-Pest zone thus only these 2 zones (called Basezone) were involved in the model.
The original number of the pipes were over 50 thousand in the Base zone. Thiswas simplified for hydraulic simulations, the final model consists of 193 pipes, 19 fixedspeed pumps, 25 variable speed pump, 13 on/off type valves, 11 reservoirs, and 216nodes. The data is not available due to the request of the industrial partner, however,the result of some simulations is depicted in Chapter 2. More details about the possiblemodelling can be found in Section 1.4.2, FHM model.
168

Fig 43. Pipe network of the Central zone of Budapest.
169

Fig 44. Simplified hydraulic network of the Central zone and the East-Pest zone of Budapest.
170

Appendix 2 Detailed results
2.1 Detailed statistics for the genetic algorithms
These tables contain the statistics of the genetic algorithms, Chapter 2. The bold valuesshow the objective (cost) function values in eand the normal typeset values are thenumber of evaluations until the 1st feasible solution was found, in 1000 evaluations.
Table 31. Median values.
Search Constraint handling
technique Full Only dead storage Only scaling Nothing
Neutral Search7172 7253 7267 7308132 254 350 340
Penalty7220 7275 7193 7268159 207 163 225
Powell’s method7205 7280 7202 7259157 208 154 212
Deb’s approach7218 7274 7195 7250155 204 162 214
Table 32. Deviation values.
Search Constraint handling
technique Full Only dead storage Only scaling Nothing
Neutral Search166 201 209 206887 1699 3016 2346
Penalty181 178 179 184
1292 1638 1286 1685
Powell’s method178 187 181 189
1382 1570 1501 1567
Deb’s approach188 190 192 189
1254 1557 1424 1459
171

Table 33. Confidence intervals at 5% significance level.
Search Constraint handling
technique Full Only dead storage Only scaling Nothing
Neutral Search[7206 7229] [7281 7308] [7299 7327] [7328 7355][ 229 349] [ 727 956] [ 1595 2000] [ 1312 1627]
Penalty[7236 7260] [7281 7305] [7211 7235] [7281 7306][ 388 562] [ 568 788] [ 376 549] [ 596 822]
Powell’s method[7228 7252] [7296 7321] [7223 7247] [7276 7301][ 376 562] [ 538 749] [ 409 611] [ 519 729]
Deb’s approach[7249 7275] [7291 7317] [7224 7250] [7268 7293][ 377 546] [ 555 765] [ 398 589] [ 483 680]
Table 34. Minimum values.
Search Constraint handling
technique Full Only dead storage Only scaling Nothing
Neutral Search6878 6954 7009 6995
23 41 33 60
Penalty6893 6916 6888 6911
41 40 34 34
Powell’s method6887 6945 6870 6876
34 44 32 39
Deb’s approach6866 6914 6874 6859
42 31 38 56
Table 35. Maximum values.
Search Constraint handling
technique Full Only dead storage Only scaling Nothing
Neutral Search8106 8102 8186 802511454 11958 11980 11599
Penalty8200 7895 8004 800211958 11888 11424 11959
Powell’s method8065 8043 8048 828511786 11955 10999 11977
Deb’s approach8017 8324 8064 800511547 11983 11426 11725
172

A C T A U N I V E R S I T A T I S O U L U E N S I S
Book orders:Granum: Virtual book storehttp://granum.uta.fi/granum/
S E R I E S C T E C H N I C A
456. Morais de Lima, Carlos Héracles (2013) Opportunistic resource and networkmanagement in autonomous packet access systems
457. Nardelli, Pedro Henrique Juliano (2013) Analysis of the spatial throughput ininterference networks
458. Ferreira, Denzil (2013) AWARE: A mobile context instrumentation middlewareto collaboratively understand human behavior
459. Ruusunen, Mika (2013) Signal correlations in biomass combustion – aninformation theoretic analysis
460. Kotelba, Adrian (2013) Theory of rational decision-making and its applications toadaptive transmission
461. Lauri, Janne (2013) Doppler optical coherence tomography in determination ofsuspension viscosity
462. Kukkola, Jarmo (2013) Gas sensors based on nanostructured tungsten oxides
463. Reiman, Arto (2013) Holistic work system design and management : — aparticipatory development approach to delivery truck drivers’ work outside thecab
464. Tammela, Simo (2013) Enhancing migration and reproduction of salmonid fishes :method development and research using physical and numerical modelling
465. Yadav, Animesh (2013) Space-time constellation and precoder design underchannel estimation errors
466. Schaberreiter, Thomas (2013) A Bayesian network based on-line risk predictionframework for interdependent critical infrastructures
467. Halonen, Niina (2013) Synthesis and applications of macroscopic well-alignedmulti-walled carbon nanotube films
468. Remes, Jukka (2013) Method evaluations in spatial exploratory analyses ofresting-state functional magnetic resonance imaging data
469. Oravisjärvi, Kati (2013) Industry and traffic related particles and their role inhuman health
470. Czajkowski, Jakub (2013) Optical coherence tomography as a characterizationmethod in printed electronics
471. Haapalainen, Mikko (2013) Dielectrophoretic mobility of a spherical particle in2D hyperbolic quadrupole electrode geometry
C472etukansi.kesken.fm Page 2 Monday, October 14, 2013 4:04 PM

ABCDEFG
UNIVERSITY OF OULU P .O. B 00 F I -90014 UNIVERSITY OF OULU FINLAND
A C T A U N I V E R S I T A T I S O U L U E N S I S
S E R I E S E D I T O R S
SCIENTIAE RERUM NATURALIUM
HUMANIORA
TECHNICA
MEDICA
SCIENTIAE RERUM SOCIALIUM
SCRIPTA ACADEMICA
OECONOMICA
EDITOR IN CHIEF
PUBLICATIONS EDITOR
Professor Esa Hohtola
University Lecturer Santeri Palviainen
Postdoctoral research fellow Sanna Taskila
Professor Olli Vuolteenaho
University Lecturer Hannu Heikkinen
Director Sinikka Eskelinen
Professor Jari Juga
Professor Olli Vuolteenaho
Publications Editor Kirsti Nurkkala
ISBN 978-952-62-0265-5 (Paperback)ISBN 978-952-62-0266-2 (PDF)ISSN 0355-3213 (Print)ISSN 1796-2226 (Online)
U N I V E R S I TAT I S O U L U E N S I SACTAC
TECHNICA
U N I V E R S I TAT I S O U L U E N S I SACTAC
TECHNICA
OULU 2013
C 472
József Gergely Bene
PUMP SCHEDULE OPTIMISATION TECHNIQUES FOR WATER DISTRIBUTION SYSTEMS
UNIVERSITY OF OULU GRADUATE SCHOOL;UNIVERSITY OF OULU,FACULTY OF TECHNOLOGY,DEPARTMENT OF PROCESS AND ENVIRONMENTAL ENGINEERING ,SYSTEMS ENGINEERING LABORATORY;PATTANTYÚS-ÁBRAHÁM GÉZA DOCTORAL SCHOOL OF MECHANICAL ENGINEERING SCIENCES;BUDAPEST UNIVERSITY OF TECHNOLOGY AND ECONOMICS,DEPARTMENT OF HYDRODYNAMIC SYSTEMS
C 472
ACTA
József Gergely B
eneC472etukansi.kesken.fm Page 1 Monday, October 14, 2013 4:04 PM