Public PhD defence
59
1 1 Esmaeil Jahanshahi | Control Solutions for Multiphase Flow Public PhD defence Control Solutions for Multiphase Flow Linear and nonlinear approaches to anti- slug control PhD candidate: Esmaeil Jahanshahi Supervisors: Professor Sigurd Skogestad Professor Ole Jørgen Nydal PhD Defence – October 18 th 2013, NTNU, Trondheim
-
Upload
tanisha-wilkinson -
Category
Documents
-
view
44 -
download
1
description
Public PhD defence Control Solutions for Multiphase Flow Linear and nonlinear approaches to anti-slug control PhD candidate: Esmaeil Jahanshahi Supervisors: Professor Sigurd Skogestad Professor Ole Jørgen Nydal. PhD Defence – October 18 th 2013, NTNU, Trondheim. Outline. Modeling - PowerPoint PPT Presentation
Transcript of Public PhD defence

1
1
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Public PhD defence
Control Solutions for Multiphase FlowLinear and nonlinear approaches to anti-slug control
PhD candidate: Esmaeil JahanshahiSupervisors: Professor Sigurd Skogestad Professor Ole Jørgen Nydal
PhD Defence – October 18th 2013, NTNU, Trondheim

2
2
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Outline
• Modeling
• Control structure design- Controlled variable selection
- Manipulated variable selection
• Linear control solutions- H∞ mixed-sensitivity design
- H∞ loop-shaping design
- IMC control (PIDF) based on identified model
- PI Control
• Nonlinear control solutions- State estimation & state feedback
- Feedback linearization
- Adaptive PI tuning
- Gain-scheduling IMC

3
3
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Introduction
* figure from Statoil

4
4
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Slug cycle (stable limit cycle)
Experiments performed by the Multiphase Laboratory, NTNU

5
5
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Introduction Anti-slug solutions• Conventional Solutions:
– Choking (reduces the production)
– Design change (costly) : Full separation, Slug catcher
• Automatic control: The aim is non-oscillatory flow regime together with the maximum possible choke opening to have the maximum production

6
6
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Modeling

7
7
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Modeling: Pipeline-riser case study
OLGA sample case:4300 m pipeline300 m riser100 m horizontal pipe9 kg/s inflow rate

8
8
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Modeling: Simplified 4-state model
State equations (mass conservations law):
θ
h
L2
hc
wmix,out
x1, P1,VG1, ρG1, HL1
x3, P2,VG2, ρG2 , HLT P0
Choke valve with opening Z
x4
h>hc
wG,lp=0
wL,lp
L3
wL,in
wG,in
w x2
L1
1 , ,G G in G lpm w w
1 , ,L L in L lpm w w
2 , ,G G lp G outm w w
2 , ,L L lp L outm w w
1 : mass of gas in the pipelineGm
1 : mass of liquid in the pipelineLm
2 : mass of gas in the riserGm
2 : mass of liquid in the riserLm

9
9
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Simple model compared to OLGA

10
10
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Experimental rig
Pump
BufferTank
WaterReservoir
Seperator
Air to atm.
Mixing Point
safety valveP1
Pipeline
Riser
Subsea Valve
Top-sideValve
Water Recycle
FT water
FT air
P3
P4
P2
3m

11
11
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Simple model compared to experiments
Top pressure Subsea pressure
Experiment

12
12
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Modeling: Well-pipeline-riser system
OLGA sample case:3000 m vertical well320 bar reservoir pressure4300 m pipeline300 m riser100 m horizontal pipe

13
13
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Modeling: 6-state simplified model
, ,Gp G in G lpm w w
, ,Lp L in L lpm w w
, ,Gr G lp G outm w w
, ,Lr L lp L outm w w
,1( )gor
Gw r G ingorm w w
1,1
( )Lw r L ingorm w w
Pwh
Pbh
Pin
Prt , m,rt , L,rt
win
wout
Qout
Prb
Z1
Z2
Two new states:mGw: mass of gas in wellmLw: mass of liquid in well

14
14
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Model fitting using bifurcation diagrams
simplified modelolga simulations

15
15
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Control Structure Design

16
16
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Control Structure What to control? using which valve?
Pin
P2
Prb
WQ
L
m
Pwh
Pbh
Win
• Candidate Manipulated Variables (MV): 1. Z1 : Wellhead choke valve2. Z2 : Riser-base choke valve3. Z3 : Topside choke valve
• Candidate Controlled Variables (CVs):1. Pbh: Pressure at bottom-hole2. Pwh: Pressure at well-head3. Win: Inlet flow rate to pipeline4. Pin: Pressure at inlet of the pipeline5. Pt: Pressure at top of the riser6. Prb: Pressure at base of the riser7. Pr: Pressure drop over the riser8. Q: Outlet Volumetric flow rate9. W: Outlet mass flow rate10. m: Density of two-phase mixture 11. L: Liquid volume fraction
• Disturbances (DVs):– WGin: Inlet gas flow (10% around nominal)– WLin: Inlet liquid flow (10% around nominal)

17
17
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Control Structure Design: Method
SimplifiedModel
ControllabilityAnalysis
Simulations withLinearized Model
Simulations withNonlinear Model
Input-output pairs
Experiment
Robust input-output pairing
ComparingResults
good
bad
bad
bad
good
good
ComparingResults
Experiment or detailed model
Model fitting

18
18
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Controllability Analysis
• The state controllability is not considered in this work. We use the input-output controllability concept as explained by Skogestad and Postlethwaite (2005)
• Chapter 5, Chapter 6

19
19
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Minimum achievable peaks of S and T
,min ,min1
p
i
Ni
S T zpi i
z pM M M
z p
�0.01 0 0.01 0.02 0.03 0.04 0.05�0.03
�0.02
�0.01
0
0.01
0.02
0.03
Real axis
Imag
inar
y ax
is
Z=1.5%
Z=2%
Z=3%
Z=3.33% Z=5%
Z=1.5%
Z=2%
Z=3%
Z=4%Z=30%
Z=5%
Z=10%Z=15%
Z=20%
Z=21.8% Z=24% Z=30%
Z=5%
Z=10%Z=15%
Z=20%
Z=24%Z=30%
RHP �ZerosRHP �poles
Top pressure:Fundamentallydifficult to controlWith large valve opening

20
20
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Control Structure: Suitable CVs
• Good CVs – Bottom-hole pressure or subsea pressures
– Outlet flow rate
– Top-side pressure combined with flow-rate or density (Cascade)
• Bad CVs– Top-side pressure
– Liquid volume fraction

21
21
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Control Structure: Suitable MVsUsing top-side valveUsing riser-base valve
Wellhead valvecannot stabilizethe system
Experiment

22
22
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Nonlinearity of system
Process gain = slope
Experiment

23
23
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Linear Control Solutions

24
24
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
y1
y2
K (s)
G (s)
W P
W u
W Ty
GENERALIZED PLANT P (s)
eu1
u2
+_
CONTROLLER
u
min ( ) ,u
TK
P
W KS
N K N W T
W S
1
1
1
( ( )) ( ( ))
( ( )) ( ( ))
( ( )) ( ( ))
u
T
P
KS j W j
T j W j
S j W j
Small γ means a better controller, but it depends on design specifications Wu, WT and WP
WP: PerformanceWT: RobustnessWu: Input usage
Solution 1: H∞ control based on mechanistic modelmixed-sensitivity design

25
25
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Solution 1: H∞ control based on mechanistic modelmixed-sensitivity design
10-2
10-1
100
101
0
20
40
60
80
Mag
[-]
10-2
10-1
100
101
100
150
200
250
Phas
e [d
eg]
[Rad/s]
10-2
10-1
100
101
10-2
100
102
|S|
Sensitivity transfer function
|S| |/WP|
10-2
10-1
100
101
10-2
100
102
|T|
Complementary sensitivity transfer function
|T| |/WT|
10-2
10-1
100
101
100
101
102
103
Input usage
[Rad/s]
|KS |
|KS| |/Wu|
Controller:

26
26
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
0 2 4 6 8 10 12 14 16 18 2015
20
25
30
35
40
open-loop stable
open-loop unstable
inlet pressure (controlled variable)P
in [k
pa]
t [min]
0 2 4 6 8 10 12 14 16 18 200
20
40
60
80
Controller Off Controller On Controller Off
open-loop stable
open-loop unstable
Zm
[%]
t [min]
actual valve position (manipulated variable)
Experiment
Solution 1: H∞ control based on mechanistic modelExperiment, mixed-sensitivity design

27
27
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Controller:
10-2
10-1
100
101
0
20
40
60
80
Mag
[-]
IMC H Mixed-sensitivity H Loop-shaping
10-2
10-1
100
101
50
100
150
200
250
Phas
e [d
eg]
[Rad/s]
IMC H Mixed-sensitivity H Loop-shaping
10-2
10-1
100
101
10-2
10-1
100
101
102
|S|
Sensitivity transfer function
IMC H Mixed-sensitivity H Loop-shaping
10-2
10-1
100
101
10-2
10-1
100
101
102
|T|
Complementary sensitivity transfer function
IMC H Mixed-sensitivity H Loop-shaping
10-2
10-1
100
101
10-2
100
102
104
Input usage
[Rad/s]
|KS |
IMC H Mixed-sensitivity H Loop-shaping
Solution 2: H∞ control based on mechanistic modelloop-shaping design

28
28
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
0 5 10 15 20
15
20
25
30
35 open-loop stable
open-loop unstable
inlet pressure (controlled variable)P
in [k
pa]
t [min]
0 5 10 15 200
20
40
60
80
Controller OffController On
Controller Off
open-loop stable
open-loop unstable
Zm
[%]
t [min]
actual valve position (manipulated variable)
Experiment
Solution 2: H∞ control based on mechanistic modelExperiment - loop-shaping design

29
29
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Solution 3: IMC based on identified modelModel identification
First-order model is not a good choice
First-order unstable with time delay:
Closed-loop stability:
Steady-state gain:

30
30
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Solution 3: IMC based on identified modelModel identification
Fourth-order mechanistic model:
Hankel Singular Values:
Model reduction:
4 parameters need to be estimated

31
31
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Solution 3: IMC based on identified modelIMC design
Bock diagram for Internal Model Control system
IMC for unstable systems:
y u e r + _ Plant( )C s
Model:
IMC controller:

32
32
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Solution 3: IMC based on identified modelPID and PI tuning based on IMC
IMC controller can be implemented as a PID-F controller
PI tuning from asymptotes of IMC controller
0
20
40
60
80
Mag
nitu
de (
dB)
10-4
10-3
10-2
10-1
100
101
90
135
180
225
Pha
se (
deg)
Bode Diagram
Frequency (rad/s)
---- IMC/PID-F
---- PI

33
33
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Solution 3: IMC based on identified modelExperiment
0 20 40 60 80 100 120 14023
24
25
26
27
Pin
[kpa
]
t [sec]
data set-point filtered identified
Closed-loop stable:
Open-loop unstable:
IMC controller:
Experiment

34
34
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Solution 3: IMC based on identified modelExperiment
PID-F controller:
PI controller:
0 2 4 6 8 10 12 14 16 18 2015
20
25
30
35
40
open-loop stable
open-loop unstable
inlet pressure (controlled variable)
Pin
[kpa
]
t [min]
0 2 4 6 8 10 12 14 16 18 200
20
40
60
80
Controller OffController On
Controller Off
open-loop stable
open-loop unstable
Zm
[%]
t [min]
actual valve position (manipulated variable)
0 2 4 6 8 10 12 14 16 18 2015
20
25
30
35
40
open-loop stable
open-loop unstable
inlet pressure (controlled variable)
Pin
[kpa
]
t [min]
0 2 4 6 8 10 12 14 16 18 200
20
40
60
80
Controller OffController On
Controller Off
open-loop stable
open-loop unstable
Zm
[%]
t [min]
actual valve position (manipulated variable)
Experiment

35
35
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Comparing linear controllers
• IMC controller does not need any mechanistic model• IMC controller is easier to tune using the filter time constant
• H ∞ loop-shaping controller results in a faster controller that stabilizes the system up to a larger valve opening

36
36
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Experiments on medium-scale S-riser
Open-loop unstable:
IMC controller:

37
37
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
PID-F controller:
PI controller:
Experiment
Experiments on medium-scale S-riser

38
38
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Nonlinear Control Solutions

39
39
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
PTNonlinear observer K
Statevariables
uc
uc
Pt
Solution 1: observer & state feedback

40
40
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
High-Gain Observer
1 1
2 2
3 3
4 4
ˆ ˆ( )
ˆ ˆ( )
1ˆ ˆˆ( ) ( )
ˆ ˆ( )
m
z f z
z f z
z f z y y
z f z
1 : mass of gas in the pipeline ( )gpz m
2 : mass of liquid in the pipeline ( )lpz m
3 ,: pressure at top of the riser ( )r tz P
4 : mass of liquid in the riser ( )lrz m
,
( )
g r
LrG r
rr t
l
RT
mM
m
VP

41
41
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
State Feedback
0
ˆˆ( ) ( ( ) ) ( ( ) )t
c ss i inu t K x t x K P r d
Kc : a linear optimal controller calculated by solving Riccati equationKi : a small integral gain (e.g. Ki = 10−3)

42
42
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
0 50 100 150 200 250 3002.75
2.8
2.85
x 104
Pbh
[kPa]
0 50 100 150 200 250 3006600
680070007200
740076007800
Pwh
[kPa]
0 50 100 150 200 250 300
9
10
11
12
win [kg/s]
0 50 100 150 200 250 3005000
5200
5400
5600
Pr,t
[kPa]
0 50 100 150 200 250 3000
10
20
30
time [min]
wout
[kg/s]
0 50 100 150 200 250 3000
0.05
0.1
0.15
0.2
Z (valve opening)
0 50 100 150 200 250 300-0.5
0
0.5
1
time [min]
K1
K2
K3
K4
K5
Control signal
Nonlinear observer and state feedbackOLGA Simulation

43
43
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
High-gain observer – top pressure
measurement: topside pressurevalve opening: 20 %
Experiment
0 5 10 15 20 25 30 35
20
30
40
time [min]
P1 [k
pa g
auge
]
subsea pressure (estimated by observer)
Open-Loop Stable
Open-Loop Unstable
actualobserverset-point
0 5 10 15 20 25 30 350
5
10
15
time [min]
P2 [k
pa g
auge
]
top-side pressure (measurement used by observer)
Open-Loop Stable
Open-Loop Unstable
actualobserver
0 5 10 15 20 25 30 350
20
40
60
ControllerOff
Controller On Controller Off
Open-Loop Stable
Open-Loop Unstable
time [min]
Zm
[%]
top-side valve actual position

44
44
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Fundamental limitation – top pressure
,min1
pNi
Si i
z pM
z p
Z = 20% Z = 40%
Ms,min 2.1 7.0
Measuring topside pressure we can stabilize the system only in a limited range
RHP-zero dynamics of top pressure
-0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
Real axis
Imag
inar
y ax
is
Z=5% Z=95%Z=5% Z=95%
Z=15%
Z=20%
Z=30%
Z=45%
Z=60% Z=95%
Z=15%
Z=20%
Z=30%
Z=45%
Z=60%Z=95%
RHP-Zeros
RHP-poles

45
45
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
High-gain observer – subsea pressure
measurement: subsea pressurevalve opening: 20 %
Experiment
0 2 4 6 8 10
20
30
40 Open-Loop Stable
Open-Loop Unstable
time [min]
P1 [k
pa g
auge
]
subsea pressure (measurement used by observer)
actualobserver
0 2 4 6 8 100
5
10
15 Open-Loop Stable
Open-Loop Unstable
time [min]
P2 [k
pa g
auge
]
top-side pressure (estimated by observer)
actualobserver
0 2 4 6 8 100
20
40
60
Controller Off
Open-Loop Stable
Open-Loop Unstable
time [min]
Zm
[%]
top-side valve actual position Not working ??!

46
46
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Chain of Integrators
• Fast nonlinear observer using subsea pressure: Not Working??!• Fast nonlinear observer (High-gain) acts like a differentiator• Pipeline-riser system is a chain of integrator• Measuring top pressure and estimating subsea pressure is differentiating• Measuring subsea pressure and estimating top pressure is integrating
2 ( )f x1( )f xrtP
inP

47
47
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
• Anti-slug control with top-pressure is possible using fast nonlinear observers
• The operating range of top pressure is still less than subsea pressure• Surprisingly, nonlinear observer is not working with subsea pressure,
but a (simpler) linear observer works very fine.
Method \ CV Subsea pressure Top Pressure
Nonlinear Observer Not Working !? Working
Linear Observer Working Not Working
PI Control Working Not Working
Max. Valve 60% 20%
Nonlinear observer and state feedbackSummary

48
48
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
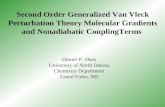
Solution 2: feedback linearization
PT
PT
Nonlinear controller
ucPrt

49
49
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Solution 2: feedback linearizationCascade system

50
50
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Output-linearizing controllerStabilizing controller for riser subsystem
System in normal form:
Linearizing controller:
Control signal to valve:
dynamics bounded
: riser-base pressure : top pressure

51
51
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
0 5 10 15 2010
20
30
40
t [min]
Prb
[kP
a]
riser-base pressure (controlled variable)
open-loop stable
open-loop unstable
set-point
measurement
0 5 10 15 200
5
10
15 open-loop stable
open-loop unstable
topside pressure (measurement used by controller)
t [min]
Prt [
kPa]
0 5 10 15 200
50
100Controller Off Controller On Controller Off
open-loop stableopen-loop unstable
t [min]
Zm
[%
]
actual valve position (manipulated variable)
Experiment
0 10 20 30 40 50 60 70 80 90 10010
20
30
40
50
Z1 [%]
Pin
[kpa
]
min & max steady-state
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
Z1 [%]
Prt [k
pa]
min & max steady-state
Gain:
CV: riser-base pressure (y1), Z=60%

52
52
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
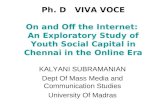
0 5 10 15 20
20
30
40
open-loop stable
open-loop unstable
riser-base pressure (measurement used by controller)
t [min]
Prb
[kP
a]
0 5 10 15 200
5
10
15
t [min]
Prt [
kPa]
topside pressure (controlled variable)
open-loop stable
open-loop unstable
set-point
measurement
0 5 10 15 200
50
100
Controller Off Controller On Controller Off
open-loop stable
open-loop unstable
t [min]
Zm
[%
]
actual valve position (manipulated variable)
Experiment
CV: topside pressure (y2), Z=20%
y2 is non-minimum phase

53
53
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Solution 3: Adaptive PI Tuning
0 10 20 30 40 50 60 70 80 90 10010
20
30
40
50
Z1 [%]
Pin
[kpa
]
min & max steady-state
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
Z1 [%]
Prt [k
pa]
min & max steady-state
Static gain:
Linear valve:
PI Tuning:
slope = gain

54
54
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Experiment
Solution 3: Adaptive PI TuningExperiment
0 5 10 15 20 25 3015
20
25
30
35
40
open-loop stable
open-loop unstable
inlet pressure (controlled variable)
Pin
[kpa
]
t [min]
0 5 10 15 20 25 300
20
40
60
80
open-loop stable
open-loop unstable
Zm
[%]
t [min]
actual valve position (manipulated variable)
0 5 10 15 20 25 30-100
-50
0 open-loop stable
Kc [-
]
t [min]
proportional gain
0 5 10 15 20 25 30
200
400
600
I [se
c]
t [min]
integral time

55
55
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Solution 4: Gain-Scheduling IMC
Three identified model from step tests:
Z=20%:
Z=30%:
Z=40%:
Three IMC controllers:

56
56
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Solution 4: Gain-Scheduling IMCExperiment
0 5 10 15 2015
20
25
30
35
40
open-loop stable
open-loop unstable
inlet pressure (controlled variable)
t [min]
Pin
[kP
a]
0 5 10 15 200
5
10
15 open-loop stable
open-loop unstable
topside pressure
t [min]
Prt [
kPa]
0 5 10 15 200
50
100
open-loop stable
open-loop unstable
t [min]
Zm
[%
]
actual valve position (manipulated variable)
Experiment

57
57
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Comparison of Nonlinear Controllers
• Gain-scheduling IMC is the most robust solution• Gain-scheduling IMC does not need any mechanistic model• Adaptive PI controller is the second controller, and it is based on a
simple model for static gain• Controllability remarks:
– Fundamental limitation control: gain of the system goes to zero for fully open valve – Additional limitation top-side pressure: Inverse response (non-minimum-phase)

58
58
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Conclusions
• A new simplified model verified by OLGA simulations and experiments• Suitable CVs and MVs for stabilizing control were identified• Anti-slug control using a subsea valve close to riser-base• Online PID and PI tuning rules for anti-slug control• New linear and nonlinear control solutions were developed and tested
experimentally• We showed that …
– Simple methods work better for process control
– Fundamental controllability limitations are idependant from control design

59
59
Esmaeil Jahanshahi | Control Solutions for Multiphase Flow
Acknowledgements
Thank you!
• SIEMENS: Funding of the project• Master students: Anette Helgesen, Knut Åge Meland, Mats Lieungh,
Henrik Hansen, Terese Syre, Mahnaz Esmaeilpour and Anne Sofie Nilsen.