
Progetto Aerodinamico di un velivolo a decollo verticale ... · A comporre la squadra di progetto...
114
Progetto aerodinamico delle ventole intubate di un velivolo a decollo verticale Laboratorio Progettuale MA. VOLA. – Macchina Volante Tutor universitario: Prof. Pierangelo Masarati Tutor di progetto: Ing. Marco Morandini Adelmo Cristiano Innocenza Malossi matr. 652964 Anno Accademico 2003/04
Transcript of Progetto Aerodinamico di un velivolo a decollo verticale ... · A comporre la squadra di progetto...

Progetto aerodinamico delle ventole intubate di
un velivolo a decollo verticale
Laboratorio Progettuale
MA. VOLA. – Macchina Volante
Tutor universitario: Prof. Pierangelo Masarati Tutor di progetto: Ing. Marco Morandini
Adelmo Cristiano Innocenza Malossi matr. 652964
Anno Accademico 2003/04

Indice
Capitolo 1 Introduzione pag. 3 Specifiche di progetto “ 6 Capitolo 2 Progetto della parte interna del
condotto della ventola pag. 7
Stima della potenza necessaria per il volo a punto fisso
“ 8
Progetto preliminare del convergente “ 14 Progetto preliminare del rotore “ 16 Progetto preliminare del divergente “ 17 Calcolo del parametro σ e della
potenza necessaria “ 19
Capitolo 3 Stima delle prestazioni
aerodinamiche in volo avanzato pag. 22
Stima delle forze aerodinamiche generate dai condotti dei fan
“ 23
Stima delle forze aerodinamiche generate dal velivolo parziale: ala-fusoliera
“ 32
Calcolo della polare del velivolo completo trimmato
“ 33
Capitolo 4 Progetto degli elementi interni al
condotto dei fan pag. 37
Calcolo di velocità e pressione in ogni sezione del condotto
“ 38
Progetto del bulbo “ 45 Stima del numero di giri minimo e
massimo delle ventole “ 46
Modello a vortice libero “free vortex flow”
“ 48
Calcolo del coefficiente di swirl “ 50 Calcolo delle forze prodotte
dall’elemento di pala “ 51
Coefficienti di perdita di carico del rotore KR e dello statore Ks
“ 55
Progetto dello statore “ 56
1

Scelta del profilo aerodinamico delle pale della ventola
pag. 63
Progetto delle pale delle ventole “ 65 Capitolo 5 Analisi delle prestazioni dei fan in
funzione del passo pag. 71
Analisi dello stallo delle pale “ 74 Calcolo del passo e dei coefficienti di
trazione e di coppia della ventola “ 75
Andamento dei coefficienti caratteristici in diverse configurazioni di volo a quota zero
“ 76
Andamento dei coefficienti caratteristici in diverse configurazioni di volo a 2000 m di quota
“ 83
Andamento dei coefficienti caratteristici in diverse configurazioni di volo a 4000 m di quota
“ 90
Capitolo 6 Conclusioni pag. 98 Appendice A1 Progetti alternativi del divergente
del fan pag. 101
Vantaggi e difficoltà progettuali delle soluzioni alternative proposte
“ 106
Appendice A2 Istruzioni per il calcolo della polare
ala-fusoliera pag. 112
Bibliografia pag. 113
2

Capitolo 1
Introduzione
Il laboratorio progettuale MA. VOLA. prevede la realizzazione del progetto
preliminare di un velivolo a decollo verticale dotato di quattro ventole
intubate. Il velivolo in questione è ispirato al “Bell X-22” (fig. 1-1) un
velivolo sperimentale della U.S. Navy realizzato nel 1966 che rappresenta
uno dei pochi esemplari esistenti e soprattutto volanti di velivoli di questo
tipo. Si tratta di un V/STOL (Vertical Short Take Off and Landing), ovvero
un velivolo a decollo e atterraggio verticale in grado di mantenere per un
prolungato lasso di tempo la condizione di volo a punto fisso. Si è cercato
quindi di seguire, in linea di massima, la forma e la struttura di questo
unico esempio, progettando un velivolo che segue le soluzioni
aerodinamiche e strutturali adottate da questo esemplare con alcune
modifiche.
Fig. 1-1 – Bell X-22.
3

A comporre la squadra di progetto sono undici persone, divise in quattro
gruppi di lavoro relativi a differenti aspetti del velivolo: aerodinamica,
meccanica del volo, struttura e impiantistica. Il gruppo aerodinamico è
composto da tre persone che si sono trovate a lavorare a volte in
collaborazione su problematiche comuni, altre volte separatamente sulle
rispettive parti del progetto.
In questa tesi si esporrà, in prevalenza, il progetto delle quattro ventole
intubate, cercando di dimostrare l’effettivo vantaggio fornito dalla
costruzione di un condotto attorno alla ventola, soprattutto nel volo a
punto fisso, dove se opportunamente progettato garantisce un notevole
incremento di trazione. In particolare si vuole studiare il comportamento
di una ventola intubata nelle condizioni di volo a punto fisso e di volo
avanzato.
Essendo il velivolo in esame a decollo verticale, tra le principali manovre
che lo caratterizzano è compresa la conversione, nella quale esso passa
dalla condizione di volo a punto fisso, con le ventole che generano una
trazione diretta verticalmente, alla condizione di volo avanzato, nella quale
le ventole generano una trazione necessaria solo ed esclusivamente a
vincere la resistenza aerodinamica del velivolo. Il velivolo in questa fase di
volo sarà studiato solo in prima approssimazione e con un approccio
stazionario.
Durante lo sviluppo delle diverse fasi progettuali si sono incontrate
numerose difficoltà nel reperire fonti attendibili, soprattutto in campo
aerodinamico, essendo relativamente pochi i velivoli esistenti caratterizzati
da geometrie simili a quelle adottate. Per questo motivo in alcuni passaggi
si è dovuto ricorrere a delle semplificazioni, soprattutto per quanto
riguarda lo studio della resistenza aerodinamica del velivolo.
Le specifiche del progetto prevedono la realizzazione di un velivolo avente
peso massimo di 4000 kg, in grado di volare a punto fisso fino alla quota
4

di 4000 m e di raggiungere una velocità massima almeno pari a 500
km/h. Il velivolo è classificato come un velivolo passeggeri ed è in grado di
trasportare sei passeggeri con relativo bagaglio, più due piloti. Il peso del
carburante stivato a bordo è di 675 kg e consente di raggiungere
un’autonomia oraria di 220 minuti ed un’autonomia chilometrica di 800
km. Il velivolo dispone di due propulsori del tipo Makila 2A1 in grado si
produrre più di 1800 hp ciascuno.
Le dimensioni caratteristiche del velivolo in sede di progetto sono riportate
in figura 1-2.
Fig. 1-2 – Viste del velivolo.
1 Per tutte le specifiche visitare il sito internet: http://www.turbomeca.com/public/en/societe/turbines_detail.php?gamme=makila
5

Specifiche di progetto
Nelle fasi progettuali che contraddistinguono il velivolo in questione si sono
utilizzate diverse condizioni di progetto a seconda delle differenti specifiche
da soddisfare e dal grado d’avanzamento del progetto stesso. E’ necessario
precisare che la scelta della condizione di progetto è ricaduta sempre sul
volo a punto fisso in quanto esso rappresenta la fase di volo più pericolosa,
oltre che la più onerosa dal punto di vista della trazione. Nel volo a punto
fisso tutte le superfici aerodinamiche sono scariche e non contribuiscono
in alcun modo alla stabilità ed al sostentamento del velivolo. E’ quindi
necessario che gli unici organi in grado di controllare il velivolo mentre
esso vola a punto fisso, ovvero i fan, siano progettati al fine di garantire la
massima efficienza proprio in questa condizione di volo. Le specifiche delle
varie fasi di progetto sono riassunte schematicamente in tabella 1-1.
Tabella 1-1 – Specifiche e relative condizioni di progetto.
Fase progettuale: Specifiche: Condizione di progetto: Capitolo 2: Progetto del condotto del fan.
Garantire la permanenza in volo a punto fisso fino alla quota di 4000 m, per il velivolo a pieno carico in condizioni di sicurezza.
Quota di volo: 4000 m. Velocità di volo: 0 km/h.
Capitolo 3: Stima della resistenza aerodinamica del velivolo completo.
Ottenere una stima attendibile (al più pessimistica) della resistenza aerodinamica del velivolo nella condizione di volo avanzato.
Quota di volo: varie. Velocità di volo: varie. Configurazione del velivolo: velivolo trimmato in volo rettilineo, orizzontale, uniforme, avente i condotti allineati con la corrente asintotica.
Capitolo 4: Progetto della ventola e dello statore.
Ottimizzare le prestazioni delle pale delle ventole per la condizione di volo a punto fisso a quota zero. Ottimizzare le prestazioni dello statore per il completo recupero del più grande coefficiente di swirl. Dimensionare lo statore in modo tale da consentire di alloggiare all’interno di uno dei suoi elementi l’albero di trasmissione diretto alla ventola.
Quota di volo: 0 m. Velocità di volo: 0 km/h. Profilo aerodinamico posto all’incidenza di miglior efficienza.
Capitolo 5: Verifica delle prestazioni.
Verificare che il velivolo sia in grado di raggiungere in volo avanzato la velocità di 500 km/h e che sia in grado di volare a punto fisso fino ad almeno 4000 m di quota.
6

Capitolo 2
Progetto della parte interna del condotto della
ventola
La prima fase progettuale da affrontare riguarda il dimensionamento del
condotto delle ventole intubate. Esse dovranno essere in grado di generare
una spinta sufficiente a far decollare il velivolo verticalmente, mantenerlo
in hover (volo a punto fisso) per un intervallo prolungato ed a permettergli
di raggiungere una velocità di crociera in volo avanzato sufficientemente
elevata. Di tutte queste operazioni la più onerosa, dal punto di vista della
trazione, è senza alcun dubbio quella del decollo verticale e della
conseguente permanenza in hover, ad una distanza sufficiente dal terreno
al fine di evitare l’effetto suolo. Questa condizione, che prende il nome di
OGE (Out of Ground Effect), è la più gravosa e risulta adatta ad un
dimensionamento preliminare del condotto del fan.
Come già accennato nell’introduzione, il vantaggio di costruire un
condotto attorno all’elica è quello di essere in grado di generare una spinta
maggiore, a parità di dimensioni dell’elica rispetto ad un'elica non
intubata, in condizioni di volo a punto fisso. Ciò si ottiene grazie al
controllo della velocità d’efflusso del getto, attraverso l’imposizione
dell’area d’uscita del divergente. Il condotto riduce l’accelerazione del
flusso a valle della ventola rispetto a caso dell’elica libera, diminuendo la
potenza indotta perduta a pari variazione di quantità di moto. È quindi
fondamentale, per il corretto dimensionamento del condotto e
conseguentemente del rotore interno, esprimere la potenza necessaria per
la permanenza in hover del velivolo, in funzione di un parametro
caratteristico della geometria del condotto. Tale parametro, indicato con σ,
7

è il rapporto tra l’area d’efflusso del condotto, Aeff, e l’area del condotto
nella sezione nella quale è posizionata la ventola, Aven.
eff
ven
AA
σ = (2.1)
Risulta quindi conveniente esprimere le potenze in gioco in funzione di tale
parametro, al fine di semplificare il dimensionamento del condotto.
Stima della potenza necessaria per il volo a punto fisso
La potenza necessaria per il volo a punto fisso, a quota fissata e con
velocità di salita nulla, può essere stimata considerando ed applicando la
teoria del disco attuatore.
Fig. 2-1 – Schema condotto.
Preso come riferimento lo schema in figura 2-1, dove d2 e d4 risultano
essere rispettivamente i diametri della sezione del rotore e della sezione
d’efflusso, e V2 e V4 le rispettive velocità, la trazione T è data dal prodotto
della portata in massa e della velocità d’efflusso al termine del divergente.
4T mV= (2.2)
Per poter considerare la potenza necessaria reale, occorre introdurre un
parametro che esprima la non idealità del condotto e consenta di tener
8

conto degli effetti della viscosità, dell’efficienza delle pale della ventola e
della non uniformità del carico su disco. Tale parametro è “l’indice di
merito”, M, definito nella (2.3) come il rapporto tra la potenza necessaria
ideale, Pi e quella reale, P.
iPMP
= (2.3)
L’indice di merito generalmente varia tra 0.70 e 0.80 [Rif. V], tuttavia per
una corretta stima preliminare delle potenze in gioco, al fine di non
sottostimare alcuna grandezza, risulta conveniente utilizzare il più piccolo
valore di quest’intervallo.
La potenza necessaria ideale, per la condizione di volo a punto fisso nella
quale la velocità di volo V0 è nulla, può essere scritta come nella (2.4).
2
4
2iVP m= (2.4)
Dall’equazione di continuità, nell’ipotesi di densità costante ed
introducendo il rapporto tra le aree σ, riscritto nella (2.5) riferendosi alla
figura 2-1, si può ricavare l’espressione (2.6).
4
2
AA
σ = (2.5)
22 2 4 4 4
VA V A V Vσ
= ⇒ = (2.6)
La portata in massa risulta essere espressa dalla (2.7).
2 2m A Vρ= (2.7)
9

Dalla (2.2) si può ora scrivere una nuova espressione per la trazione.
(2.8) 24 4T mV A Vρ= = 4
Dalla (2.9) si ricava la velocità al punto 4 del condotto in funzione della
trazione.
( )4 /V T A2ρ σ= (2.9)
Considerando il rapporto tra la (2.4) e la (2.8) si ricava la potenza
necessaria.
4
2 2i
iP V VPT= ⇒ = 4 T (2.10)
Infine sostituendo la (2.9) in quest’ultima si ottiene l’espressione finale per
la potenza necessaria ideale.
3/ 2
22iTP
Aσρ= (2.11)
Essa esprime la potenza necessaria ideale in funzione della trazione e del
parametro σ, caratteristico della geometria del condotto e consente quindi
di analizzare l’andamento qualitativo delle potenze necessarie richieste dal
velivolo, in relazione alle grandezze geometriche fondamentali del
condotto.
L’espressione della potenza necessaria reale deve quindi essere riscritta
come nella (2.12).
3/ 2
2
12
TPMAσρ
= ⋅ (2.12)
10

Ricavata una comoda espressione della potenza necessaria per il volo a
punto fisso, occorre definire le altre grandezze necessarie al
dimensionamento e le condizioni di progetto per il condotto.
Per determinare la massima trazione necessaria alla permanenza in hover
del velivolo, è necessario fare alcune considerazioni sulla posizione del
baricentro rispetto ai fan nelle diverse configurazioni di carico del
velivolo1. Da essa dipende, infatti, la diversa trazione che devono generare
i fan anteriori e posteriori per mantenere in equilibrio il velivolo nel volo a
punto fisso.
Rispetto alla prua del velivolo, i fan anteriori e quelli posteriori sono
posizionati rispettivamente a 3.25 m e 7.25 m. La configurazione di ottimo
è quindi quella nella quale il baricentro del velivolo si trovi esattamente a
5.25 m dalla prua, punto di mezzeria tra i fan. Le stime dei pesi2 nelle
varie configurazioni e la relativa posizione del baricentro del velivolo
rispetto alla prua sono riportate nella tabella 2-1.
Da questi valori emerge come in ogni configurazione il baricentro risulti
collocato oltre il punto di mezzeria e quindi i fan posteriori debbano
generare sempre maggior trazione rispetto ai fan anteriori.
Utilizzando i valori riportati nella tabella 2-1, e applicando semplici
considerazioni d’equilibrio attorno al baricentro del velivolo, al fine di
garantire la stabilità in condizioni di volo a punto fisso, si ottiene il
massimo valore della trazione da generare relativa ad i fan posteriori. In
figura 2-2 sono riportati i valori della trazione necessaria per i fan
posteriori, in funzione del peso del velivolo nelle varie configurazioni di
carico. Si nota come la massima trazione necessaria al fine di mantenere
stabile il velivolo in volo a punto fisso è di 10220N, valore sul quale si
dovranno basare i successivi calcoli. 1 Esse sono funzione della quantità di combustibile a bordo e della posizione del carico pagante. 2 Stime operate dagli altri gruppi di lavoro del laboratorio progettuale.
11

Tabella 2-1 - Configurazioni del velivolo e posizione del baricentro rispetto alla prua.
Posizione del baricentro [m] Peso del velivolo [kg] 5.3692 3933 5.3220 3733 5.3756 3733 5.4291 3733 5.4393 3533 5.3827 3533 5.3261 3533 5.3906 3333 5.3928 3283 5.3372 3083 5.4020 3083 5.4669 3083 5.4820 2883 5.4126 2883 5.3432 2883 5.4247 2683
Stabilito il valore di trazione di progetto, è ora necessario scegliere il valore
delle altre variabili che compaiono nella (2.12) e aggiungere alcune rilevanti
considerazioni.
Le specifiche del progetto prevedono che in volo avanzato il velivolo possa
raggiungere la quota di 4000 m. Per il volo in hover, in via del tutto
precauzionale, assumiamo come densità la stessa della massima quota in
volo, che risulta essere pari a 0.819 kg/m3.
Va inoltre considerato che l’area effettiva è inferiore a quella complessiva
del condotto, in quanto nella zona centrale bisogna tener conto della
presenza del bulbo del rotore che può essere preliminarmente
dimensionato con un diametro pari al 20% del diametro del condotto nella
sezione 23.
La potenza necessaria così stimata è quella di sostentamento in hover a
velocità nulla. In realtà è necessario che vi sia un margine di potenza da
utilizzare per le manovre, così da rendere possibile la transizione dal volo
a punto fisso al volo avanzato. Per questo motivo si considera la potenza
necessaria calcolata con la (2.12), come il 90% della potenza a disposizione
del velivolo; il rimanente 10% viene utilizzato per effettuare le manovre. 3 Nel successivo studio dell’elemento di pala tale valore sarà rivisto e modificato in quanto risulterà opportuno scegliere un diametro del bulbo maggiore.
12

2600 2800 3000 3200 3400 3600 3800 40007000
7500
8000
8500
9000
9500
10000
10500
11000
Peso del velivolo [Kg]
Traz
ione
nec
essa
ria [N
]
Fig. 2-2 – Valori di trazione necessaria in hover per i fan posteriori in diverse configurazioni di carico.
La figura 2-3 rappresenta l’andamento delle potenze necessarie, in
funzione del parametro d’espansione del divergente σ e del diametro del
rotore. E’ evidente che è conveniente utilizzare diametri alla ventola ridotti
solo nel caso in cui si riescano ad ottenere elevati valori del parametro σ;
mentre è necessario impiegare condotti d’elevato diametro per rapporti
d’espansione di poco superiori all’unità.
Prima di poter scegliere il diametro della sezione 2 del condotto è quindi
necessario comprendere quale sia il massimo valore di σ realizzabile,
compatibilmente con le specifiche del progetto riguardanti le dimensioni
del condotto ed in particolare la lunghezza dello stesso.
13

0 0.5 1 1.5 2 2.5 30
200
400
600
800
1000
1200
1400
Sigma
Pot
enza
nec
essa
ria a
ll'al
bero
[Hp]
Diametro della ventola
1.4 m1.5 m1.6 m1.7 m1.8 m1.9 m 2 m
Fig. 2-3 – Diagramma della potenza necessaria in volo a punto fisso, per una singola ventola intubata in funzione del parametro σ alla quota di 4000 m.
Con riferimento alla figura 2-1, è possibile suddividere il condotto della
ventola intubata in tre zone caratteristiche: convergente, rotore e
divergente.
Progetto preliminare del convergente
La prima zona, chiamata convergente, è la parte del condotto necessaria
per la corretta aspirazione dell’aria. Essa deve essere strutturata e
dimensionata affinché al rotore arrivi la portata d’aria richiesta per il suo
corretto funzionamento. E’ importante progettare il convergente in modo
tale che il fluido non separi prima di raggiungere il rotore (in particolare
nella condizione di volo a punto fisso dove il flusso d’aria viene aspirato
anche lateralmente); se ciò dovesse avvenire si avrebbe una riduzione
dell’efficienza di tutto il fan, con un conseguente calo delle prestazioni. Un
condotto progettato con un corretto raggio di curvatura all’imbocco (fig. 2-
14
4) consente di limitare, se non annullare completamente, i distacchi di
vena fluida e garantisce quindi una corretta portata d’aria al rotore.
Fig. 2-4 – Imbocco con convergente.
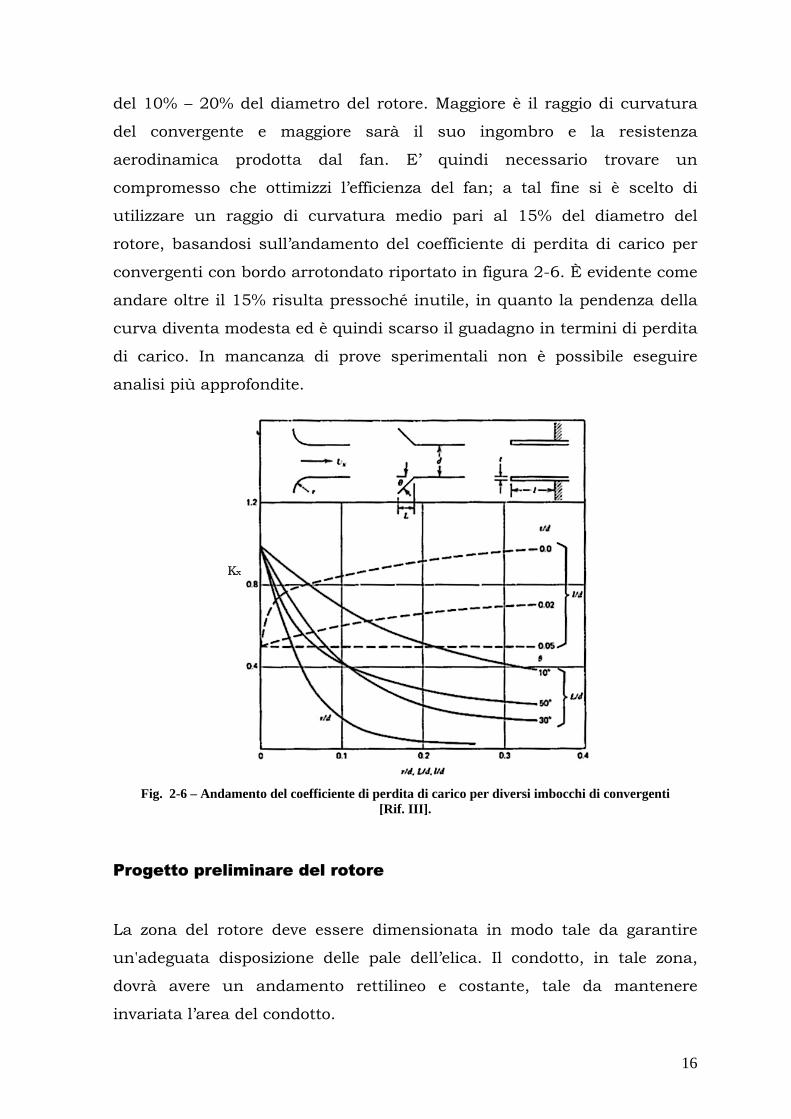
Nel volo a punto fisso le condizioni d’aspirazione cambiano ulteriormente e
parte dell’aria viene aspirata lateralmente dal condotto. In queste
condizioni è necessario che il convergente garantisca una perfetta
aderenza della vena fluida alla parete del condotto, affinché l’effettiva area
d’aspirazione al rotore non diminuisca riducendone le prestazioni (fig. 2-
5). E’ possibile verificare sperimentalmente [Rif. VI] che il distacco del
fluido, su pareti con piccoli raggi di curvatura (ad esempio sul bordo
d’attacco di un convergente), avviene nelle zone in cui la forza centrifuga
diventa maggiore del gradiente di pressione statica verso la parete e risulta
indipendente dalla viscosità del fluido e dallo strato limite.
Fig. 2-5 – Schema della vena fluida in condizioni di volo a punto fisso.
Per soddisfare queste esigenze è quindi necessario che il convergente
abbia un raggio di curvatura medio sufficientemente elevato, dell’ordine
15
del 10% – 20% del diametro del rotore. Maggiore è il raggio di curvatura
del convergente e maggiore sarà il suo ingombro e la resistenza
aerodinamica prodotta dal fan. E’ quindi necessario trovare un
compromesso che ottimizzi l’efficienza del fan; a tal fine si è scelto di
utilizzare un raggio di curvatura medio pari al 15% del diametro del
rotore, basandosi sull’andamento del coefficiente di perdita di carico per
convergenti con bordo arrotondato riportato in figura 2-6. È evidente come
andare oltre il 15% risulta pressoché inutile, in quanto la pendenza della
curva diventa modesta ed è quindi scarso il guadagno in termini di perdita
di carico. In mancanza di prove sperimentali non è possibile eseguire
analisi più approfondite.
Fig. 2-6 – Andamento del coefficiente di perdita di carico per diversi imbocchi di convergenti
[Rif. III].
Progetto preliminare del rotore
La zona del rotore deve essere dimensionata in modo tale da garantire
un'adeguata disposizione delle pale dell’elica. Il condotto, in tale zona,
dovrà avere un andamento rettilineo e costante, tale da mantenere
invariata l’area del condotto.
16

In questa fase del progetto non si è in grado di stabilire quale sarà
l’ingombro dell’elica, in quanto non è stato condotto ancora alcuno studio
sull’elemento di pala e non si è quindi in grado di definire una corda
massima delle pale ed il numero delle stesse. Si può quindi solamente
eseguire una stima a priori di quanto sarà l’ingombro massimo del rotore.
E’ ragionevole pensare che tale zona non occuperà più di 0.2 m in quanto
per incrementare la spinta non bisogna necessariamente aumentare la
corda delle pale, ma si può più comodamente aumentare il numero delle
pale stesse o la loro incidenza. Solo nel caso in cui queste soluzioni non
siano sufficienti, sarà realmente necessario un aumento della zona del
rotore.
Progetto preliminare del divergente
Nella zona del divergente, a valle del rotore, avviene l’espansione del fluido,
dovuta ad una diminuzione di velocità ed ad un conseguente incremento di
pressione statica e di spinta. A seconda di quanto si riesce ad incrementare
l’area d’efflusso rispetto all’area di partenza (che coincide con l’area nella
zona del rotore), varia il parametro σ definito dalla (2.5).
Il progetto seguito in questa sede prevede un divergente a geometria
costante circolare. L’espansione avviene quindi sfruttando un graduale
aumento del diametro della sezione seguendo la lunghezza del condotto.
Esistono tuttavia delle alternative a questo tipo di divergente, alternative
caratterizzate da geometrie più complicate in grado di migliorare
sensibilmente il rapporto d’espansione σ. Tali alternative non sono state
adottate per la notevole difficoltà progettuale che le contraddistingue e per
l’impossibilità di eseguire misure sperimentali. In appendice A1 saranno
evidenziati alcuni aspetti di queste alternative ed alcuni progetti
preliminari alternativi del condotto.
Concentrandosi quindi su una geometria circolare, al fine di massimizzare
il valore di σ, bisogna individuare l’angolo di divergenza ottimale da
17

utilizzare. Tale angolo dovrà essere sufficientemente grande da garantire
un’adeguata espansione e da ridurre al minimo gli effetti d’attrito a parete
al fine di non avere eccessive perdite di carico. Tuttavia esso dovrà anche
essere tale da garantire l’aderenza del fluido alla parete del condotto, in
quanto eventuali distacchi di vena comprometterebbero le prestazioni,
riducendo l’area d’efflusso effettiva, creando zone di ricircolo e generando
notevoli perdite di carico.
Sperimentalmente si può verificare come l’angolo ottimale da utilizzare sia
funzione del rapporto tra la lunghezza del divergente e il raggio del
condotto all’inizio dello stesso; in particolare, all’aumentare della lunghezza
del divergente diminuisce il valore dell’angolo di divergenza ottimale. Per
un condotto conico l’andamento è riportato in figura 2-7 [Rif. III].
Nell’intorno di tale angolo le perdite di carico risultano minime e costanti.
Volendo ottenere una discreta espansione mantenendo limitata la
lunghezza del condotto per ridurre il più possibile gli ingombri e la
resistenza aerodinamica si è scelto di utilizzare un angolo di divergenza
pari a 8° che consente di adottare un rapporto tra lunghezza del divergente
e raggio della ventola pari a 0.773. Come si vedrà in seguito (fig. 2-9),
anche se si potesse aumentare la lunghezza del divergente a piacere
mantenendo lo stesso angolo di divergenza, non si otterrebbero rilevanti
guadagni in termini di potenza necessaria.
Fig. 2-7 – Andamento dell’angolo di divergenza ottimale per diffusori conici [Rif. III].
18

Calcolo del parametro σ e della potenza necessaria
Definite le dimensioni e le caratteristiche delle tre diverse zone del fan, è
ora possibile diagrammare l’andamento del rapporto σ (fig. 2-8) e della
potenza necessaria (fig. 2-9), in funzione del diametro della ventola e della
lunghezza totale del condotto per il volo a punto fisso. Nei calcoli che
hanno portato ai seguenti diagrammi si è utilizzato un angolo di divergenza
costante pari a 8° variando a piacere la lunghezza del divergente e
allontanandosi quindi, in alcune configurazioni, dalla condizione di ottimo.
Si vuole mostrare come la semplice geometria del divergente adottata renda
inutile qualsiasi tentativo di migliorare sensibilmente le prestazioni
attraverso un aumento della lunghezza del divergente stesso e come sia
effettivamente necessario trovare delle soluzioni alternative per ottenere
evidenti miglioramenti nelle prestazioni. Con una geometria a divergente
conico è quindi necessario adottare un diametro della ventola elevato per
diminuire la potenza necessaria al volo, mentre allungare il condotto
risulta pressoché inutile.
0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.61
1.1
1.2
1.3
1.4
1.5
1.6
1.7
Lunghezza totale del fan [m]
Sig
ma
Diametro della ventola
8°
1.4 m1.5 m1.6 m1.7 m1.8 m1.9 m 2 m
Fig. 2-8 – Diagramma del rapporto d’espansione σ con angolo di divergenza pari a 8°, in funzione del diametro della ventola e della lunghezza totale del fan (la linea tratteggiata indica il valore per cui si
ottiene un divergente con rapporto lunghezza su raggio ventola ottimale per tale angolo di divergenza).
19

0.6 0.7 0.8 0.9 1 1.1 1.2 1.3 1.4 1.5 1.60
200
400
600
800
1000
1200
1400
Lunghezza totale del fan [m]
Pot
enza
nec
essa
ria a
ll'al
bero
[Hp]
Diametro della ventola
8°
1.4 m1.5 m1.6 m1.7 m1.8 m1.9 m 2 m
Fig. 2-9 – Diagramma della potenza necessaria per il volo a punto fisso a 4000 m, con angolo di
divergenza pari a 8°, in funzione del diametro della ventola e della lunghezza totale del fan (la linea tratteggiata indica il valore per cui si ottiene un divergente con rapporto lunghezza su raggio ventola
ottimale per l’angolo di divergenza adottato).
Disponendo di due propulsori in grado di erogare complessivamente 3600
hp, la potenza necessaria massima non deve superare i 900 hp per ogni
ventola. Volendo, in ogni caso, minimizzare la potenza necessaria
massima senza accontentarsi di un valore di poco inferiore ai 900 hp per
ogni ventola intubata e volendo inoltre rispettare il rapporto tra la
lunghezza del divergente e il diametro della ventola per un angolo di
divergenza pari a 8°, attraverso successive analisi di diverse configurazioni
mediante i grafici in precedenza esposti, si è scelto di utilizzare un
diametro della ventola pari a 1.85, il quale porta al seguente
dimensionamento del condotto i cui dati caratteristici sono riportati nella
tabella 2-2.
20
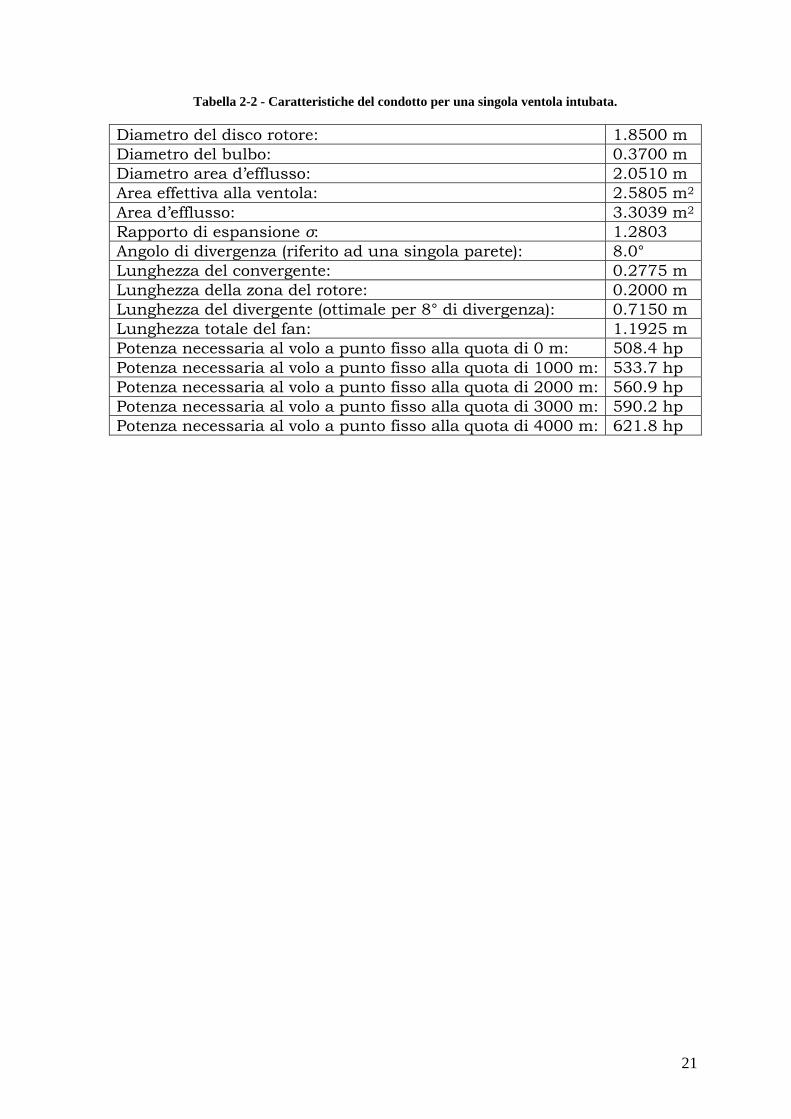
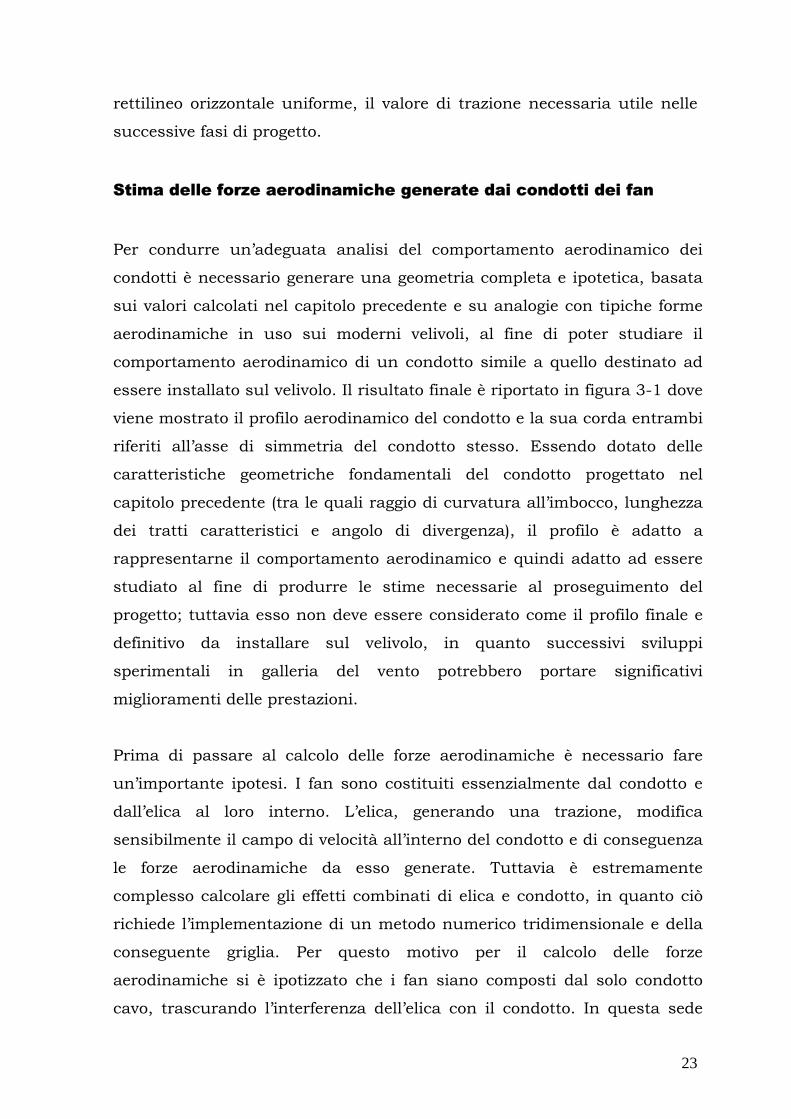
Tabella 2-2 - Caratteristiche del condotto per una singola ventola intubata.
Diametro del disco rotore: 1.8500 m Diametro del bulbo: 0.3700 m Diametro area d’efflusso: 2.0510 m Area effettiva alla ventola: 2.5805 m2
Area d’efflusso: 3.3039 m2
Rapporto di espansione σ: 1.2803 Angolo di divergenza (riferito ad una singola parete): 8.0° Lunghezza del convergente: 0.2775 m Lunghezza della zona del rotore: 0.2000 m Lunghezza del divergente (ottimale per 8° di divergenza): 0.7150 m Lunghezza totale del fan: 1.1925 m Potenza necessaria al volo a punto fisso alla quota di 0 m: 508.4 hp Potenza necessaria al volo a punto fisso alla quota di 1000 m: 533.7 hp Potenza necessaria al volo a punto fisso alla quota di 2000 m: 560.9 hp Potenza necessaria al volo a punto fisso alla quota di 3000 m: 590.2 hp Potenza necessaria al volo a punto fisso alla quota di 4000 m: 621.8 hp
21

Capitolo 3
Stima delle prestazioni aerodinamiche in volo
avanzato
Prima di procedere con l’analisi dell’elemento di pala e di progettare nel
dettaglio gli elementi interni al condotto dei fan, è necessario conoscere le
prestazioni aerodinamiche del velivolo, al fine di disporre dei valori di
portanza e di resistenza sviluppati nelle diverse condizioni di volo.
Bisogna precisare che in questa sede si produrranno solo stime delle forze
aerodinamiche generate dal velivolo, in quanto non si è in grado, senza
opportune prove sperimentali e senza conoscere nel dettaglio la geometria
di ogni singolo componente del velivolo, di sapere l’esatto valore delle forze
aerodinamiche generate. In particolare, il velivolo in esame è composto da
alcuni componenti non presenti nella maggior parte dei velivoli classici e
per i quali è risultato quindi molto difficile trovare fonti attendibili in grado
di fornire una procedura per il calcolo delle forze aerodinamiche. E’ il caso
dei condotti dei fan dei quali, dal capitolo precedente, risulta nota la
geometria interna e la lunghezza dei vari tratti.
Le stime che si otterranno nelle seguenti pagine sono frutto di molteplici
approssimazioni, ma non per questo esse risultano inutili o superflue, in
quanto si possono considerare come le migliori possibili per l’attuale livello
preliminare del progetto e possono essere utilizzate come un ottimo punto
di partenza per eventuali sviluppi futuri del progetto.
L’obbiettivo che ci si propone di raggiungere è la polare dell’intero velivolo
trimmato, al fine di essere in grado di calcolare, in ogni condizione di volo
22
rettilineo orizzontale uniforme, il valore di trazione necessaria utile nelle
successive fasi di progetto.
Stima delle forze aerodinamiche generate dai condotti dei fan
Per condurre un’adeguata analisi del comportamento aerodinamico dei
condotti è necessario generare una geometria completa e ipotetica, basata
sui valori calcolati nel capitolo precedente e su analogie con tipiche forme
aerodinamiche in uso sui moderni velivoli, al fine di poter studiare il
comportamento aerodinamico di un condotto simile a quello destinato ad
essere installato sul velivolo. Il risultato finale è riportato in figura 3-1 dove
viene mostrato il profilo aerodinamico del condotto e la sua corda entrambi
riferiti all’asse di simmetria del condotto stesso. Essendo dotato delle
caratteristiche geometriche fondamentali del condotto progettato nel
capitolo precedente (tra le quali raggio di curvatura all’imbocco, lunghezza
dei tratti caratteristici e angolo di divergenza), il profilo è adatto a
rappresentarne il comportamento aerodinamico e quindi adatto ad essere
studiato al fine di produrre le stime necessarie al proseguimento del
progetto; tuttavia esso non deve essere considerato come il profilo finale e
definitivo da installare sul velivolo, in quanto successivi sviluppi
sperimentali in galleria del vento potrebbero portare significativi
miglioramenti delle prestazioni.
Prima di passare al calcolo delle forze aerodinamiche è necessario fare
un’importante ipotesi. I fan sono costituiti essenzialmente dal condotto e
dall’elica al loro interno. L’elica, generando una trazione, modifica
sensibilmente il campo di velocità all’interno del condotto e di conseguenza
le forze aerodinamiche da esso generate. Tuttavia è estremamente
complesso calcolare gli effetti combinati di elica e condotto, in quanto ciò
richiede l’implementazione di un metodo numerico tridimensionale e della
conseguente griglia. Per questo motivo per il calcolo delle forze
aerodinamiche si è ipotizzato che i fan siano composti dal solo condotto
cavo, trascurando l’interferenza dell’elica con il condotto. In questa sede
23

tale ipotesi è accettabile in quanto l’obbiettivo che ci si è proposti di
raggiungere è il conseguimento di una stima delle forze aerodinamiche del
velivolo e non del loro esatto valore.
-0.2 0 0.2 0.4 0.6 0.8 1 1.2-0.2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
X [m]
Y [m
]
Profilo del condottoCordaAsse di simmetria
Fig. 3-1 – Profilo aerodinamico del fan con corda e asse di simmetria del condotto.
Nota l’esatta geometria del condotto si è ora in grado di effettuare una
stima delle forze aerodinamiche. In particolare si è interessati a stimare la
portanza generata dai condotti e la loro resistenza aerodinamica. I metodi
semplificati che sono nel seguito descritti e utilizzati sono confortati dai
rilievi sperimentali.
Per la stima della portanza generata dalle gondole si considera il condotto
come un’ala circolare. Dai rilievi sperimentali risulta che la portanza
generata da un’ala circolare è il doppio di quella generata da un’ala con
distribuzione di portanza ellittica, avente corda media pari alla corda
dell’ala circolare e apertura alare pari al diametro dell’ala circolare [Rif. I].
24

Per un’ala ellittica l’allungamento alare è definito dalla (3.1).
2 4b
S cλ d
π= = (3.1)
Considerando il coefficiente di portanza dell’ala circolare basato sulla
proiezione in piano della superficie dell’anello, ovvero pari al prodotto di
corda e diametro, la pendenza della curva del coefficiente di portanza del
condotto viene riscritta come nell’equazione (3.2).
24
L
ala circolare ala ellittica
dC dCdcdcd d
πα
⎛ ⎞ ⎛ ⎞⋅ = ⋅⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
L
α (3.2)
Dalla (3.2) si ricava l’espressione della pendenza della curva del coefficiente
di portanza riportato nella (3.3).
2
L L
ala circolare ala ellittica
dC dCd d
πα α
⎛ ⎞ ⎛ ⎞=⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(3.3)
Per esprimere la pendenza del coefficiente di portanza di un’ala ellittica si
può ricorrere alle ipotesi di De Young il quale applica la teoria
approssimata di Weissinger1 ad un’ala con distribuzione ellittica di
portanza, aggiungendo l’ulteriore ipotesi che l’angolo d’incidenza indotto
sia costante lungo la linea passante per i tre quarti della corda e pari
all’angolo d’incidenza dell’ala. Grazie a questo modello, poiché il
coefficiente di portanza risulta costante lungo l’ala, si può calcolare
l’andamento della curva CL/ in funzione dell’allungamento alare
considerando solo il segmento centrale dell’ala.
1 Teoria per la quale si considera un vortice portante posto al 25% della corda (o del tratto di corda nel caso di discretizzazione in pannelli) ed un punto di controllo posto al 75% della corda (o del pannello), in corrispondenza del quale si soddisfa la condizione di flusso normale nullo. La velocità indotta nel punto di controllo sarà somma di quelle dovute ai vortici di scia ed a quella del vortice portante dell’ala.
25

Integrando quindi il contributo dei vortici solo lungo il segmento centrale
dell’ala, si perviene all’espressione della pendenza della curva del
coefficiente di portanza riportata dall’equazione (3.4).
2422
L
ala ellittica
dCd
πλλα λλ
⎛ ⎞ =⎜ ⎟ +⎛ ⎞⎝ ⎠ + ⎜ ⎟+⎝ ⎠
(3.4)
Considerando il profilo riportato in figura 3-1, si può schematizzare il
condotto con un diametro medio pari a 2.10 m e una corda pari alla
lunghezza del condotto e quindi a 1.1925 m. Utilizzando questi dati si
ricava una pendenza della curva del coefficiente di portanza pari a:
( )4.2679 1/L
condotto
dC raddα
⎛ ⎞ =⎜ ⎟⎝ ⎠
(3.5)
Nota la curva del coefficiente di portanza è possibile calcolare la portanza
dei soli condotti ai diversi angoli d’incidenza e velocità di volo attraverso la
(3.6).
212
L
condotto
dCL V dcd
ρ αα
⎛ ⎞= ⋅ ⋅⎜ ⎟⎝ ⎠
(3.6)
L’andamento della portanza di ogni condotto a diverse incidenze per le
quote di 0 m, 2000 m e 4000 m, è riportato rispettivamente nelle figure 3-
2, 3-3, 3-4. Si può notare come già a velocità non molto elevate, inferiori a
200 km/h, si possono ottenere valori di portanza decisamente influenti
sull’assetto del velivolo2 e quindi utili soprattutto per la conversione, dove
il contributo di portanza delle ali non è ancora sufficiente ad equilibrare il
peso del velivolo. A velocità maggiori il contributo di portanza raggiunge
valori davvero elevati, soprattutto a grandi incidenze. Tuttavia a tali
2 A 200 km/h a quota zero, con 10° di inclinazione dei fan si genera complessivamente una portanza 14200 N in grado di sollevare circa 1500 kg.
26

velocità non è più necessario generare una così grande portanza, in
quanto le ali sono sufficienti ad equilibrare il peso del velivolo in ogni
assetto. Inoltre, come si vedrà in seguito, i fan generano già ad incidenza
nulla una grande resistenza aerodinamica che pesa notevolmente sulle
prestazioni del velivolo; mantenere elevati angoli d’incidenza per i fan ad
alte velocità di volo significa incrementare notevolmente questo già elevato
valore di resistenza. Inoltre esistono anche dei limiti strutturali che
impediscono al velivolo di sopportare carichi eccessivi alle estremità alari,
dove sono posti i fan posteriori.
Noto il contributo di portanza generato dai condotti alle diverse incidenze,
rimane da calcolare il contributo di resistenza degli stessi. Se già per la
stima della portanza dei condotti si è dovuto ricorrere a notevoli
semplificazioni per la stima della loro resistenza, le semplificazioni da
introdurre sono ancora maggiori.
0 50 100 150 200 250 300 350 400 450 5000
0.5
1
1.5
2
2.5x 10
4
Velocità di volo [Km/h]
Por
tanz
a ge
nera
ta d
a un
sin
golo
con
dotto
[N]
Angolo d'incidenza della gondola
0° 2° 4° 6° 8°10°
Fig. 3-2 – Portanza generata da un singolo condotto a diversi angoli di incidenza alla quota di 0 m.
27

0 50 100 150 200 250 300 350 400 450 5000
0.5
1
1.5
2
2.5x 10
4
Velocità di volo [Km/h]
Por
tanz
a ge
nera
ta d
a un
sin
golo
con
dotto
[N]
Angolo d'incidenza della gondola
0° 2° 4° 6° 8°10°
Fig. 3-3 – Portanza generata da un singolo condotto a diversi angoli di incidenza alla quota di 2000 m.
0 50 100 150 200 250 300 350 400 450 5000
0.5
1
1.5
2
2.5x 10
4
Velocità di volo [Km/h]
Por
tanz
a ge
nera
ta d
a un
sin
golo
con
dotto
[N]
Angolo d'incidenza della gondola
0° 2° 4° 6° 8°10°
Fig. 3-4 – Portanza generata da un singolo condotto a diversi angoli di incidenza alla quota di 4000 m.
28

Nel calcolo della portanza si è formulata l’ipotesi che il condotto sia cavo,
ipotesi che ha permesso di semplificare notevolmente i conti. Per quanto
riguarda la resistenza vi sono delle nuove considerazioni da effettuare, in
quanto risulterebbe molto riduttivo trascurare completamente il
contributo di resistenza dovuto agli elementi all’interno del fan.
La resistenza complessiva generata dal fan può essere vista come somma
della resistenza del condotto, della resistenza degli elementi interni (in
particolare dell’elica che oltre a generare una trazione produce anche una
resistenza) e della resistenza di scia, nella quale sono compresi tutti gli
effetti d’interferenza tra condotto e ventola. In questa sede si otterrà una
stima della sola resistenza del condotto, mentre il contributo di resistenza
degli elementi interni al fan è visto come una riduzione della trazione
generata dallo stesso e se ne terrà conto quando sarà trattato l’elemento di
pala nel capitolo 4. Per quanto riguarda la resistenza di scia non si è in
grado di ottenere una stima del suo effetto, in quanto la sua influenza si
potrebbe evidenziare solo con l’aiuto di prove sperimentali o di un modello
numerico tridimensionale.
Per eseguire la stima della resistenza del condotto è necessario seguire un
procedimento simile a quello utilizzato per la stima della portanza dello
stesso. Si può immaginare che la resistenza del condotto sia pari a quella
di un’ala con profilo aerodinamico simile a quello del condotto riportato in
figura 3-1, avente corda pari alla lunghezza del condotto e apertura alare
pari alla lunghezza della circonferenza esterna del condotto.
Per determinare il coefficiente di resistenza dell’ala così ottenuta è
necessario studiare il comportamento aerodinamico del profilo del
condotto. Ciò può essere effettuato attraverso il calcolo di una soluzione in
un modello a potenziale, mediante un qualsiasi metodo a pannelli,
corretta con opportune equazioni in grado di tener conto degli effetti della
presenza dello strato limite e della viscosità del fluido. Per eseguire questo
29

calcolo si è utilizzato Xfoil3, in grado, tra l’altro, di calcolare il coefficiente
di resistenza di un qualsiasi profilo aerodinamico. Il calcolo è stato
eseguito a diversi numeri di Reynolds ed in seguito, attraverso
interpolazione, si è ottenuto un andamento continuo del coefficiente di
resistenza. Viste le numerose semplificazioni sin qui operate, risulta
opportuno aggiungere un coefficiente correttivo di sicurezza alla stima di
resistenza dei condotti sin qui calcolata. Si considera quindi un
coefficiente di resistenza per le gondole pari al 120% di quello calcolato
attraverso il procedimento sin qui descritto. L’andamento del coefficiente
di resistenza ottenuto è riportato in figura 3-5.
0 2 4 6 8 10 12
x 106
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
0.018
0.02
Numero di Reynolds
Coe
ffici
ente
di r
esis
tenz
a pa
ssiv
a di
un
sing
olo
cond
otto
CD0 interpolatoCD0 Xfoil
Fig. 3-5 – Andamento del coefficiente di resistenza passiva del condotto a diversi numeri di Reynolds incrementato al 120%.
Per quanto riguarda la resistenza indotta ai diversi angoli d’incidenza, non
è possibile eseguire una stima attendibile, in quanto non è garantito che
per una geometria così complessa valgano le considerazioni che la
meccanica del volo applica alle ali dei comuni velivoli. Per questo motivo si
considera come unica configurazione nello studio delle caratteristiche
3 Un programma di Mark Drela e Harold Youngren disponibile gratuitamente in rete.
30

aerodinamiche del fan quella ad incidenza nulla, configurazione nella
quale la portanza del condotto risulta essere nulla e quindi la resistenza
indotta minima e trascurabile.
Dalle considerazioni appena formulate e dall’equazione (3.7) si è in grado
di ricavare l’andamento della resistenza del condotto ad incidenza nulla in
funzione di quota e velocità di volo.
( )(21 1.22 DD V dc Cρ π= )⋅ (3.7)
L’andamento della resistenza per un singolo condotto è riportato in figura
3-6. Da esso emerge che il contributo di resistenza dei condotti ad alte
velocità è elevato4 ed è quindi notevolmente influente sulle prestazioni del
velivolo.
0 50 100 150 200 250 300 350 400 450 5000
100
200
300
400
500
600
700
800
Velocità di volo [Km/h]
Res
iste
nza
gene
rata
da
un s
ingo
lo c
ondo
tto a
d in
cide
nza
nulla
[N]
Quota di volo
0 m1000 m2000 m3000 m4000 m
Fig. 3-6 – Andamento della resistenza di un singolo condotto ad incidenza nulla in funzione di velocità e quota di volo.
4 In particolare alla velocità di 500 km/h a quota zero la resistenza complessivamente generata dai 4 condotti è pari a circa 2900 N, mentre per la stessa velocità a 4000 m di quota scende a circa 1950 N.
31

Stima delle forze aerodinamiche generate dal velivolo parziale:
ala-fusoliera
Stimate le forze aerodinamiche generate dai condotti dei fan, restano da
calcolare le forze aerodinamiche prodotte dal resto del velivolo. L’analisi
del comportamento dell’ala e della fusoliera può essere fatto
contemporaneamente, così da tener in considerazione gli effetti indotti
sull’ala da parte della fusoliera. Va tuttavia precisato che in questa sede
non si tiene conto degli effetti indotti dalla presenza dei quattro condotti
sul resto del velivolo, in quanto essi per essere studiati necessitano di
prove e rilievi sperimentali, dato che non esiste alcun metodo analitico per
determinare l’influenza che una geometria così particolare provoca sul
resto del velivolo.
Per lo studio del comportamento aerodinamico del velivolo parziale, ala-
fusoliera, ci si è avvalsi dell’uso di un programma ESDU5 in grado di
calcolare la polare di un velivolo convenzionale in regime subsonico, a
diversi numeri di Reynolds note alcune dimensioni caratteristiche. Il
programma è progettato per il calcolo di diverse geometrie alari che
possono essere quindi caratterizzate da rastremazione, svergolamento e
angolo diedro. In particolare le ali del velivolo in esame sono planari e
caratterizzate da un rapporto di rastremazione pari a 0.69, mentre lo
svergolamento è negativo e pari a 3.5° (per i dettagli relativi al progetto
delle ali si consultino gli altri lavori di tesi relativi all’aerodinamica del
velivolo). Per quanto riguarda le limitazioni e l’applicabilità del
programma, si è verificato che la geometria del velivolo in esame fosse
compatibile con i limiti entro i quali il calcolo risulta accurato. In
appendice A2 è riportato il file di testo contenente i parametri necessari al
programma per eseguire il calcolo. In figura 3-7 è possibile osservare i
risultati prodotti dal programma ESDU a diversi numeri di Reynolds.
5 ESDU numero 96025b, “Drag due to lift for non-planar swept wings up to high angles of attack at subsonic speeds”.
32

0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
CD velivolo parziale
CL v
eliv
olo
parz
iale
Numero di Reynolds2000000500000012000000
Fig. 3-7 – Polare del velivolo parziale ala-fusoliera.
Calcolo della polare del velivolo completo trimmato
Noti i valori di portanza e resistenza dell’intero velivolo, si può infine
calcolare la polare del velivolo completo trimmato, ovvero nella condizione
in cui il velivolo mantiene assetto costante e quindi i momenti prodotti da
tutte le forze aerodinamiche rispetto al baricentro si bilanciano
perfettamente. Per fare ciò è necessario conoscere alcune caratteristiche
geometriche e aerodinamiche del velivolo in esame. Tali caratteristiche
sono riportate in tabella 3-1.
Per imporre l’equilibrio al momento attorno all’asse di beccheggio e
calcolare il coefficiente di portanza del piano di coda orizzontale, affinché il
velivolo risulti essere trimmato, è sufficiente scrivere l’espressione (3.8) in
cui con CLN si indica il coefficiente di portanza dei condotti dei fan6.
6 La ‘n’ nel pedice riprende il termine inglese “nacelle”.
33

Tabella 3-1 – Caratteristiche geometriche e aerodinamiche necessarie al calcolo della polare del velivolo trimmato (tra parentesi la sigla con cui saranno in seguito indicate).
Centro aerodinamico del velivolo parziale ala-fusoliera (XACwb): 5.654 m Centro aerodinamico del piano di coda (XACt): 9.250 m Superficie alare (Sw): 14.500 m2
Superficie orizzontale del piano di coda (Sth): 2.044 m2
Superficie orizzontale mobile del piano di coda: 1.000 m2
Superficie orizzontale fissa del piano di coda: 1.044 m2
Superficie verticale del piano di coda (Stv): 3.500 m2
Coefficiente di resistenza passiva piano di coda (CD0PC): 0.005 Pendenza della curva CL/ della parte fissa del piano di coda: 0.09 Pendenza della curva CL/ della parte mobile del piano di coda: 0.078
( ) ( )( )4T TH WB WB Nth AC CG L w AC CG L LS X X C S X X C C− + − + ⋅ 0= (3.8)
Rielaborando l’equazione (3.8) si ricava il coefficiente di portanza del piano
di coda orizzontale riportato nell’espressione (3.9).
( )( ) (
4WB
TH WB N
T
AC CGwL
th AC CG
X XSC CS X X
−= − + ⋅
−)L LC (3.9)
E’ quindi possibile calcolare i coefficienti di portanza e di resistenza del
velivolo completo riferiti alla superficie alare, le cui espressioni sono
riportate rispettivamente nelle equazioni (3.10) e (3.11).
4tot WB N TH
nL L L L
w w
SC C C CS S
= + ⋅ + hS (3.10)
2
04 TH
tot WB N TH TV
Ln thD D D D D
w th w
CS SC C C C CS Sπλ
⎛ ⎞= + ⋅ + + +⎜ ⎟⎜ ⎟
⎝ ⎠0
tv
w
SS
(3.11)
Prima di calcolare la polare del velivolo completo trimmato è necessario
fare alcune considerazioni, la prima delle quali riguarda i condotti. Come
si è potuto osservare in precedenza, non si è in grado in alcun modo di
stimare la resistenza dei condotti, quando essi sono ad incidenza non
34

nulla rispetto alla corrente asintotica. Osservando inoltre che, a causa del
già elevato valore di resistenza dei condotti ad incidenza nulla, è oltremodo
sconveniente mantenere i condotti inclinati in volo avanzato, si è deciso
calcolare la polare del velivolo completo trimmato in condizione
d’incidenza nulla dei fan rispetto alla corrente asintotica.
Per quanto riguarda la posizione del baricentro, essendo essa funzione
della distribuzione del carico pagante, non è costante. Per questo motivo la
polare del velivolo trimmato varia in funzione del peso del velivolo, della
quantità di combustibile a bordo e della distribuzione del carico pagante
all’interno. A livello progettuale, dovendo garantire le prestazioni del
velivolo in ogni condizione di carico ed, in particolare, nella condizione di
massimo carico, si considera la polare del velivolo riferita alla posizione del
baricentro in condizioni di pieno carico7.
Si è finalmente in grado di riportare in figura 3-8 la polare del velivolo
completo trimmato a diversi numeri di Reynolds.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
CD
CL
Numero di Reynolds
200000050000009000000
Fig. 3-8 – Polare del velivolo completo trimmato in configurazione di massimo carico pagante a diversi numeri di Reynolds.
7 Tale configurazione è stata indicata dal gruppo di colleghi della meccanica del volo come la più critica per quanto riguarda la manovrabilità e la stabilità del velivolo.
35

E’ infine possibile calcolare l’andamento della resistenza complessiva del
velivolo (fig. 3-9) in volo rettilineo orizzontale uniforme, con i fan ad
incidenza nulla ed in funzione della velocità di volo e della quota; in esso
si è tenuto conto della variazione della curva polare in funzione del
numero di Reynolds.
0 100 200 300 400 500 600 700 800 9005000
6000
7000
8000
9000
10000
11000
12000
13000
Velocità di volo [Km/h]
Res
iste
nza
del v
eliv
olo
com
plet
o [N
]
Quota di volo
0 m1000 m2000 m3000 m4000 m
Fig. 3-9 – Andamento della resistenza del velivolo completo in volo rettilineo orizzontale uniforme in funzione di velocità e quota di volo.
36

Capitolo 4
Progetto degli elementi interni al condotto dei fan
Dopo aver dimensionato il condotto dei fan ed aver calcolato le
caratteristiche aerodinamiche del velivolo in volo avanzato, si è finalmente
in grado di progettare nel dettaglio la struttura degli organi interni dei
propulsori.
Nella prima parte di questo capitolo si vedranno le nozioni teoriche alla
base del progetto, le ipotesi fondamentali e lo schema di calcolo seguito. A
seguire verranno esposti e commentati tutti i risultati. E’ necessario
precisare che il procedimento seguito ha portato ad un risultato definitivo
solo dopo numerose iterazioni. Per la determinazione di alcuni coefficienti
correttivi, ad esempio, è stato necessario effettuare un primo calcolo con
coefficienti stimati, per poi ottenere i coefficienti corretti solo dopo
un’analisi dei primi risultati.
L’interno di ogni condotto dei fan è caratterizzato principalmente da un
bulbo, una ventola ed uno statore. E’ inoltre presente anche un’aletta
aerodinamica1 posta nella sezione d’uscita del condotto, avente lo scopo di
garantire la manovrabilità del velivolo senza necessariamente dover
ruotare uno o più fan. Il progetto di tale aletta aerodinamica è riportato in
un lavoro di tesi collegato a questo e non verrà quindi trattato in questa
sede, tuttavia, come si vedrà in seguito, la sua presenza influenza il
1 Una sorta di alettone in grado di sfruttare il getto d’aria che esce dal condotto e di deviarlo al fine di manovrare in tempi rapidi il velivolo; va infatti ricordato che la rotazione dei fan è garantita da attuatori rotativi in grado di ruotare i fan di oltre 90°, ma in tempi decisamente troppo lunghi per poter essere utilizzati nelle manovre di volo e, in particolare, nel volo a punto fisso dove è necessario garantire controllo e stabilità. Sono quindi necessari degli alettoni posti all’uscita dei condotti dei fan in grado di sfruttare la trazione generata dagli stessi per manovrare il velivolo senza attendere la rotazione dei condotti.
37

progetto di alcuni elementi all’interno del condotto ed è quindi necessario
tenerla in considerazione.
Per progettare gli organi interni del fan è per prima cosa necessario
scegliere la condizione di progetto. Dallo studio effettuato nel capitolo 2
riguardante il progetto del condotto, è emerso come la miglior condizione
di progetto sia quella del volo a punto fisso. Essa risulta ottimale anche
per il progetto degli organi interni al fan, in quanto rappresenta una fase
di volo fondamentale per il velivolo in esame essendo la più pericolosa2 ed
allo stesso tempo la più onerosa dal punto di vista della trazione da
sviluppare. E’ quindi necessario che il progetto della ventola e di tutti gli
altri componenti sia ottimizzato per la condizione di volo a punto fisso. Dal
capitolo 2 risulta noto il valore della trazione necessaria al volo a punto
fisso, pari a 10220 N. La quota di progetto scelta è quella del livello del
mare, in quanto essa risulta essere la tipica quota di decollo e atterraggio
ed inoltre il velivolo in esame raramente si troverà nella condizione di
volare a punto fisso a quote molto maggiori di questa3.
Prima di passare al progetto vero e proprio va precisato che nei paragrafi
seguenti si è seguito un progetto per una condizione di volo generica, dove
quindi comparirà anche il termine della velocità di volo, questo per
ottenere delle formule generali che saranno utili in seguito.
Calcolo di velocità e pressione in ogni sezione del condotto
Si consideri il condotto schematizzato in figura 4-1. Come si può notare,
l’area della sezione d’ingresso indicata col pedice 1 è differente
dall’effettiva area di cattura del getto indicata col pedice 0; in particolare
2 Perdere il controllo del velivolo, anche solo per qualche secondo, per un malfunzionamento di qualche organo ed in particolare dei fan nel volo a punto fisso, significa quasi sicuramente schiantarsi al suolo, essendo tutte le superfici aerodinamiche scariche. 3 Tuttavia come si vedrà in seguito, nel capitolo 5, esso è in grado di volare a punto fisso senza problemi anche alla quota di 4000 m.
38

bisogna precisare che l’area di cattura a seconda della condizione di volo
può essere minore, maggiore o uguale all’area d’ingresso, ciò in funzione
della portata in massa necessaria a generare la trazione richiesta. Inoltre,
vengono indicate con il pedice 2 e 3 rispettivamente le condizioni subito a
monte e subito a valle della ventola. E’ quindi evidente che le velocità V2 e
V3 sono uguali, così come i diametri delle sezioni 2 e 3.
Fig. 4-1 – Schema condotto dei fan con indicate le sezioni caratteristiche.
Vi è un’ulteriore ipotesi da formulare. Le velocità all’interno del condotto
non variano solo da sezione a sezione ma anche all’interno della sezione
stessa. In particolare tendono ad annullarsi in prossimità delle pareti,
mentre sono massime lontano da esse. Essendo la geometria del condotto
estremamente complicata, non è possibile studiare con precisione
l’andamento delle velocità all’interno di ogni sezioni. Ci si riferirà quindi a
delle velocità di sezione intese come velocità medie attraverso le sezioni
stesse.
Per calcolare la portata in massa d’aria attraverso il fan, le velocità e le
pressioni nelle varie sezioni, note le geometrie caratteristiche del condotto,
è necessario applicare alcuni teoremi caratteristici tra cui il teorema di
Bernoulli e il teorema di continuità. Poiché il velivolo in questione è
progettato per raggiungere al massimo i 500 km/h, è possibile ritenere il
campo di moto completamente subsonico e considerare quindi nulli gli
39

effetti di comprimibilità. La densità può essere quindi ritenuta costante e
dipendente esclusivamente dalla quota di volo.
Com’è ben noto la trazione sviluppata da un fan può essere espressa dalla
(4.1).
( )4 0T m V V= − (4.1)
Applicando il teorema della conservazione della massa tra la sezione
d’efflusso, indicata con il pedice 4, e la sezione della ventola, indicata con
il pedice 2, e risolvendo il sistema (4.2) si è in grado di calcolare la velocità
V4 e la portata in massa.
( )
24 4 2 2 4 0 0
44 0
4 4
1 42
Tm A V A V V V VA
T m V Vm A V
ρ ρρ
ρ
⎧ ⎛ ⎞= =⎧ = + +⎪ ⎜⎪ ⎜⇒⎨ ⎨ ⎝= −⎪⎩ ⎪ =⎩
⎟⎟⎠ (4.2)
Noto il valore della portata in massa ed essendo nulli gli effetti di
comprimibilità, è possibile calcolare le velocità in tutte le sezioni del
condotto grazie al teorema di continuità.
4 4 2 2 1 1m V A V A V Aρ= = = (4.3)
E’ inoltre possibile calcolare l’area di cattura del condotto, A0 per ogni
velocità di volo, V0 e trazione.
00
1mAVρ
= (4.4)
Nelle condizioni di progetto le velocità nelle varie sezioni del condotto e la
portata in massa sono riportate nella (4.5).
40
0
1
2
4
0 km/h165.84 km/h244.34 km/h180.9 km/h203.37 kg/s
VVVVm
=====
(4.5)
Note le velocità in ogni sezione del condotto e la portata in massa in
funzione della trazione e della velocità di volo, è possibile calcolare
l’incremento di pressione da generare nella zona del rotore mediante la
ventola per sviluppare la trazione richiesta. Ipotizzando che l’ugello sia
completamente adattato, ovvero che la pressione nella sezione d’efflusso,
p4 sia uguale alla pressione ambiente, p0, è possibile, attraverso il teorema
di Bernoulli, calcolare le pressioni sia a monte che a valle della ventola e
nella sezione d’ingresso, come riportato nell’espressione (4.6).
( )
( )
( )
2 21 0 0 1
2 22 1 1 2
2 23 0 4 2
2
2
2
p p V V
p p V V
p p V V
ρ
ρ
ρ
⎧ = + −⎪⎪⎪ = + −⎨⎪⎪ = + −⎪⎩
(4.6)
Tuttavia tali espressioni risultano valide solo a livello teorico, in quanto la
sola presenza del condotto comporta delle perdite di carico, perdite che
aumentano il salto di pressione da generare attraverso la ventola.
Si consideri l’imbocco. Nel capitolo 2 durante il dimensionamento del
convergente si è scelto un raggio di curvatura dell’imbocco tale per cui
fossero ridotte al minimo le perdite di carico. Analizzando la figura 2-6
[Rif. III] si può osservare come, per un convergente con bordo d’entrata
arrotondato avente rapporto tra raggio di curvatura e diametro della
ventola pari a 0.15, il coefficiente di perdita di carico, KXconv sia pari a
0.075.
41

Attraverso la (4.7) è possibile calcolare la variazione di pressione totale
dovuta alla perdita di carico.
21
12conv convXH V Kρ∆ = ⋅ X (4.7)
L’espressione del teorema di Bernoulli per il convergente viene quindi
modificata come riportato nell’equazione (4.8).
( )2 22 1 1 22 convXp p V V Hρ= + − −∆ (4.8)
Per quanto riguarda il divergente nel capitolo 2 si è seguito un progetto
tale per cui l’angolo di divergenza scelto garantisse la minor presenza di
perdite di carico. Ovviamente esistono diversi fattori che possono
influenzare le perdite di carico del divergente, come ad esempio la rugosità
delle pareti o gli effetti di swirl. E’ tuttavia difficile calcolare gli effetti di
questi fattori sulle perdite di carico.
Per esprimere le perdite di carico del divergente si definisce l’efficienza del
divergente, ηD come il rapporto tra il coefficiente di pressione reale, Cp e
quello ideale, Cpi le cui espressioni riferite alla velocità d’efflusso sono
riportate nella (4.9).
2
4
2 22 22 24 4
12
1 1
p
pD
pi
pi
PCV C
CA VCA V
ρη
∆ ⎫= ⎪⎪⇒ =⎬
⎪= − = − ⎪
⎭
(4.9)
Ricavando il salto di pressione, ∆P, si ottiene l’espressione (4.10) che
esprime l’andamento della differenza di pressione in funzione del
rendimento del divergente.
42

( )2 24 2
12 DP V Vρ η∆ = − ⋅ (4.10)
Grazie a quest’ultima espressione si può riscrivere la pressione a valle
della ventola come riportato nella (4.11).
( )2 23 0 4 22 Dp p V Vρ η= + − ⋅ (4.11)
Il valore del rendimento del divergente può essere solamente stimato in
sede di progetto preliminare. Avendo cercato di dimensionare il divergente
in maniera tale da rendere minime le perdite di carico, si può garantire un
rendimento alto e pari a 0.98.
E’ quindi possibile, nota la geometria del condotto, i coefficienti di perdita
di carico, la trazione da generare, la densità e la velocità di volo, ricavare
le pressioni in ogni sezione del condotto. Nella condizione di progetto esse
sono riportate nella (4.12).
(4.12) 0 3
1 4
2
101325 Pa 100075 Pa100025 Pa 101325 Pa98406 Pa
p pp pp
= == ==
Si è quindi in grado di calcolare il salto di pressione da generare tra la
sezione 2 e la sezione 3 del condotto attraverso la ventola. Esso tuttavia
necessita di un’ulteriore correzione, in quanto per il suo calcolo si è tenuto
conto solamente delle perdite di carico dovute al condotto (convergente e
divergente), trascurando le perdite di carico e la resistenza generata dalla
presenza dello statore e delle pale della ventola.
Indicando con KT il coefficiente di salto di pressione reale e con Kth il
coefficiente di salto di pressione ideale, corrispondenti entrambi al salto di
43

pressione attraverso la ventola, è possibile esprimere l’efficienza degli
organi interni al condotto attraverso il parametro ηT.
TT
th
KK
η = (4.13)
Il coefficiente del salto di pressione reale può essere riscritto nella (4.14)
esplicitando i termini relativi allo statore, KS, al rotore, KR ed agli effetti di
swirl, Kswirl.
T th R S swiK K K K K rl= − − − (4.14)
Nel caso in esame la presenza di uno statore progettato per annullare gli
effetti di swirl permette di considerare nullo il contributo del termine Kswirl.
La (4.13) può essere riscritta come la (4.15).
1 RT
th
K KK
η S+= − (4.15)
Il salto di pressione totale, che è quindi necessario generare alla ventola, è
pari a quello calcolato precedentemente moltiplicato per l’efficienza degli
organi interni, che può essere a sua volta ricavata dalla (4.15).
1TOT
T
P Pη
∆ = ∆ ⋅ (4.16)
Si è quindi in grado di calcolare la potenza necessaria a sviluppare la
trazione richiesta espressa dalla (4.17).
2 2nec TOTP P A V= ∆ (4.17)
Si vedrà in seguito come calcolare i coefficienti KS e KR necessari per il
calcolo del salto di pressione totale.
44
Progetto del bulbo
Prima di continuare con l’analisi del progetto del fan ed entrare nel
dettaglio dei calcoli delle forze aerodinamiche prodotte dall’elemento di
pala, è necessario fare alcune considerazioni sulle dimensioni e sulla
geometria del bulbo. In sede preliminare, nel capitolo 2, si è scelto di
dimensionare il diametro del bulbo come il 20% del diametro della ventola.
Tale soluzione tuttavia comporta alcuni svantaggi e va quindi rivista prima
di proseguire.
In particolare analizzando i tratti di pala più vicini al bulbo e quindi più
vicini all’asse di rotazione, si nota che, poiché la velocità angolare è
costante per tutta la pala e la velocità assiale è ipoteticamente costante in
tutta la sezione della ventola, gli elementi di pala più vicini al bulbo si
trovano ad avere velocità relative rispetto al flusso d’aria notevolmente più
basse di quelle degli elementi di pala lontani dal bulbo4. Per generare una
trazione pari, o quantomeno vicina, a quella prodotta dagli elementi più
esterni, sarebbe quindi necessario avere corde notevolmente più grandi ed
incidenze di profilo più alte vicino al bulbo. Questo risulta impossibile per
una serie di ragioni. La prima riguarda lo spazio a disposizione vicino al
bulbo. Più il bulbo è piccolo e più la sua circonferenza è corta, riducendo
di conseguenza lo spazio necessario per aumentare la corda dei profili
delle pale, che proprio vicino al bulbo hanno angoli di calettamento
maggiori rispetto all’asse di rotazione. Aumentare eccessivamente
l’incidenza significa avvicinarsi sempre più alla zona di stallo, situazione
dalla quale è conveniente stare lontano, almeno nelle condizioni di
progetto che, va ricordato, sono quelle del volo a punto fisso a quota zero.
Senza poter quindi aumentare più di tanto né l’incidenza né la corda delle
4 Questo a causa delle notevoli dimensioni del fan. Basti pensare che la punta delle pale dista 0.925 m dall’asse di rotazione mentre con un bulbo di diametro pari al 20% del diametro del fan l’elemento di pala più vicino al bulbo dista appena 0.185 dall’asse di rotazione.
45

pale, gli elementi adiacenti ad un bulbo piccolo diventano pressoché
inutili.
E’ quindi conveniente incrementare le dimensioni del diametro del bulbo e
portarle al 30% del diametro della ventola. Come si vedrà in seguito,
questo incremento porta ad ottenere sufficiente spazio per disporre
correttamente le pale e consentire quindi di avere una corda
sufficientemente grande da rendere efficaci anche i tratti di pala vicini al
bulbo. Inoltre non sarà necessario incrementare di molto l’incidenza dei
profili adiacenti al bulbo.
Si consideri ora la parte frontale del bulbo. Essa deve essere progettata in
modo da accompagnare il flusso d’aria entrante nel convergente verso la
zona della ventola, senza introdurre perdite di carico. Non si è in grado di
studiare una geometria completa senza l’ausilio di prove sperimentali,
tuttavia esistono delle indicazioni riguardanti le dimensioni principali che
consentono di definire delle dimensioni di base a cui riferirsi.
Per avere un corretto flusso d’aria attorno al bulbo è consigliato [Rif. III]
avere una lunghezza della zona frontale5 di quest’ultimo pari ai ¾ di
quella del diametro del bulbo. Poiché il diametro è noto, la lunghezza
risulta essere pari a quella calcolata nella (4.18).
3 0.4164B BL d= ⋅ = (4.18)
Da questo valore emerge come la parte frontale del bulbo sporgerà
anteriormente fuori dal condotto di 4 cm.
Stima del numero di giri minimo e massimo delle ventole
5 Con il termine “zona frontale del bulbo” si intende la parte che va dalla punta più esterna del bulbo fino a circa metà della zona del rotore, dove il diametro del bulbo assume valore pressoché costante. In particolare, a circa metà della zona del rotore il bulbo cessa di incrementare il suo diametro e comincia lentamente a diminuirlo.
46

Il progetto dei fan prevede delle ventole intubate a passo variabile, in grado
cioè di ruotare le proprie pale al fine di variarne l’incidenza e generare più o
meno trazione. Tuttavia è molto comodo, per un velivolo a decollo verticale,
aver la possibilità di variare anche la velocità di rotazione delle ventole.
Nella fase di decollo verticale, infatti, la trazione da generare è addirittura
maggiore del peso del velivolo ed un elevato numero di giri migliora
sensibilmente la capacità di generare trazione.
Le pale della ventola intubata ruotano attorno ad un asse e, di
conseguenza, la zona che si trova ad aver velocità maggiore è l’estremità di
ogni pala. Volendo mantenere lungo tutta l’apertura delle pale un regime di
velocità subsonico, è necessario imporre una condizione sul numero di
mach. Un numero di mach massimo di 0.7 garantisce il regime subsonico
richiesto.
Per imporre la condizione sul numero di mach e calcolare il numero di giri
massimo, è sufficiente scrivere la (4.19), dove a numeratore la velocità
risulta essere composta dalla velocità angolare e dalla velocità assiale.
( )22
2
0
tipV RM
pγρ
+ Ω= (4.19)
Ricavando la velocità angolare si ottiene il numero di giri massimo,
mantenendo il valore di mach 0.7 sulla punta delle pale. Il numero di giri
massimo decresce al crescere della quota ed al crescere della velocità di
volo. Per calcolare il numero di giri minimo6, è necessario utilizzare la
quota di volo massima prevista, 4000 m, e la velocità di volo massima
prevista, 500 km/h. Per conoscere il valore della velocità assiale è 6 Che corrisponde al numero di giri massimo (mach=0.7 sulla punta delle pale) nelle condizioni di volo nelle quali questo numero è più piccolo, ovvero quota e velocità di volo massime. Così facendo si ottiene un numero di giri minimo che garantisca di volare alla massima quota e velocità di volo. Il numero di giri massimo sarà utilizzato a quote e velocità inferiori ed in particolare per il volo a punto fisso.
47

necessario seguire il procedimento di calcolo del paragrafo precedente,
ricavando la V2 basandosi su una trazione di 1568N, pari ad un quarto
della resistenza del velivolo completo (fig. 3-8) a quella quota e velocità di
volo. Si ottiene un numero di giri minimo pari a 1236 rpm.
Per calcolare il numero di giri massimo si suppone che i motori installati a
bordo siano in grado di variare il proprio numero di giri di un intervallo
pari al 20% del numero di giri massimo7. Si ottiene quindi un numero di
giri massimo pari a 1545 rpm.
Modello a vortice libero “free vortex flow”
Prima di passare all’analisi dell’elemento di pala è necessario introdurre
un modello di vortice in grado di descrivere correttamente l’andamento del
flusso vorticoso generato dalla ventola intubata. Supponiamo di avere un
vortice riferito al suo asse di rotazione. Se il fluido ha una componente di
velocità diretta come l’asse attorno al quale ruota il vortice, le particelle
descriveranno una traiettoria elicoidale. Quando questa traiettoria
possiede un raggio costante esiste una condizione di equilibrio radiale, che
si traduce nell’equilibrio tra la forza centrifuga e le forze di pressione
agenti sulla particella. E’ questa la condizione necessaria e sufficiente per
il modello a vortice libero.
Si consideri la figura 4-2. La forza centrifuga e la forza di pressione agenti
sull’elemento sono date rispettivamente dalla (4.20) e dalla (4.21).
( )2
C
rF s dr
rω
ρ= ⋅ ⋅ (4.20)
PF dp s= ⋅ (4.21)
7 I dati relativi al tipo di propulsore scelto per essere installato sul velivolo in esame non sono completi di questo dato e si può quindi solo fare un’ipotesi plausibile riguardo al massimo intervallo del numero di giri.
48

Fig. 4-2 – Schematizzazione dell’elemento infinitesimo in rotazione.
Eguagliando le due forze si ottiene la (4.22) che esprime il requisito di
equilibrio radiale.
2dp rdr
ρω= (4.22)
La pressione totale di una particella in equilibrio è data dalla (4.23), dove
VA e ωr rappresentano rispettivamente la velocità assiale e la velocità
tangenziale.
( )221 12 2AH p V rρ ρ ω= + + (4.23)
Derivando rispetto ad r si ottiene la (4.24).
( )221 12 2
A d rdVdH dpdr dr dr dr
ωρ ρ= + + (4.24)
E poiché la pressione totale e la velocità assiale sono costanti lungo r, la
(4.24) si semplifica e diventa la (4.25).
49
( )212
d rdpdr dr
ωρ= − (4.25)
Combinando la (4.22) e la (4.25) si ottiene l’equazione (4.26).
2 1costrr
ω ωr= ⇒ ∝ (4.26)
Essa mostra come ωr sia inversamente proporzionale al raggio. Questo
legame è alla base della successiva modellazione del flusso all’interno del
condotto e rappresenta un efficace strumento per rappresentare gli effetti
di swirl.
Calcolo del coefficiente di swirl
Si consideri la ventola all’interno del condotto. Il lavoro compiuto dal
rotore può essere espresso come nella (4.27).
2out TOT AL P rdrVπ= ∆ ⋅ (4.27)
Il lavoro entrante nella ventola è invece espresso dalla (4.28), dove con dC
si indica l’elemento di coppia torcente, mentre con Vθs si indica la velocità
di swirl indotta dalle pale della ventola e diretta come la velocità angolare
delle pale.
2sin AL dC V rdrV rϑρ π= Ω =Ω⋅ (4.28)
Eguagliando la (4.27) con la (4.28), e semplificando i termini comuni ad
entrambi i membri si perviene alla (4.29).
sTOTP rVϑρ∆ = Ω (4.29)
50

Si può notare come la Vθs sia effettivamente inversamente proporzionale al
raggio, il che soddisfa la condizione necessaria per la validità del modello a
vortice libero. Introducendo il coefficiente di flusso riportato nella (4.30), la
(4.29) può essere riscritta come la (4.31).
AVr
λ =Ω
(4.30)
2 sth
A
VK
Vϑ
λ= (4.31)
Infine esprimendo il coefficiente di swirl come il rapporto tra la velocità di
swirl e la velocità assiale si perviene all’espressione (4.32).
2
s ths
A
V KVϑ λε ⋅
= = (4.32)
Calcolo delle forze prodotte dall’elemento di pala
Si supponga di sezionare una generica pala appartenente alle ventole in
numerosi tratti infinitesimi. Si consideri uno qualsiasi di questi tratti di
pala che prendono il nome di elementi di pala. Dalla conservazione della
quantità di moto è possibile esprimere la forza assiale e la forza
tangenziale agenti sull’elemento di pala considerato.
(4.33)
2 22 3 2 3
0
30
s
s s
s
T sdrV drV dy p sdr p drdy
Y drV V dyϑ
ρ ρ
ρ
⎡ ⎤ ⎡= − − −⎢ ⎥ ⎢⎣ ⎦ ⎣
= −
∫ ∫
∫
0
⎤⎥⎦
Il termine s esprime la distanza che intercorre tra due generici elementi di
pala e può essere calcolato mediante la (4.34), dove con NB si indica il
51

numero di pale della ventola ed r è la distanza radiale media dell’elemento
di pala dall’asse di rotazione della ventola.
2
B
rsNπ
= (4.34)
Poiché le sezioni 2 e 3 del condotto hanno la stessa area, si può affermare
che anche le rispettive velocità sono uguali e, di conseguenza, risolvendo
gli integrali si perviene a due espressioni semplificate che consentono di
esprimere la forza tangenziale e quella normale agenti sull’elemento di
pala.
( )3 2
2 s
T p p sdrY V V sdrϑρ
= −
= (4.35)
La (4.35) può essere rivista e ulteriormente rielaborata attraverso la (4.32).
Integrando lungo l’apertura dalla pala si perviene all’espressione (4.36), che
consente di calcolare la forza tangenziale e quella assiale, corrispondente
alla trazione, agenti sulla pala. Questo schema di calcolo permette di
progettare la pala in modo tale da ottenere nelle condizioni di progetto una
completa uniformità radiale nello sviluppo del salto di pressione, ovvero
ogni elemento di pala genera lo stesso ∆P di tutti gli altri elementi
garantendo una completa uniformità del carico su disco nella condizione
di progetto.
(4.36) 2
2
tip
hub
tip
hub
R
TOTR
R
sR
T P s
Y V sρ ε
= ∆
=
∫
∫
dr
dr
Considerando nuovamente il generico elemento di pala, nella figura 4-3
sono riportate le forze agenti, gli angoli caratteristici ed i vettori velocità
52

fondamentali. Poiché la componente di velocità tangenziale è espressa
dalla (4.37)8, l’angolo βm può essere calcolato grazie alla (4.38).
12 stV r Vϑ= Ω − (4.37)
2
11 12tan
2s
m
r V
V
ϑ
sβ ελ
Ω −= = − (4.38)
Fig. 4-3 – Rappresentazione vettoriale delle forze agenti sulla pala e delle velocità relative.
La velocità Vm risulta quindi espressa dalla (4.39).
8 Si considera solo metà della velocità Vθs in quanto essa rappresenta la velocità di swirl dopo la zona della ventola, mentre in questa sede è necessario considerare la velocità di swirl alla ventola che può essere approssimata come la media tra la velocità di swirl prima della ventola (che è nulla) e la velocità di swirl dopo la ventola, pari appunto a Vθs.
53

( )
2
cosmm
VVβ
= (4.39)
Per calcolare la portanza e la resistenza sviluppate è sufficiente scomporre
le componenti di forza dirette assialmente e tangenzialmente rispetto al
fan in direzione della velocità relativa vista dal profilo dell’elemento di
pala.
cos sinsin cos
m
m m
L Y TD Y T
mβ ββ β
= += −
(4.40)
E’ quindi possibile risalire al coefficiente di portanza necessario affinché
l’elemento di pala sia in grado di generare una portanza sufficiente a
produrre la trazione richiesta.
2
2
12
12
L
m
D
m
LCV cdr
DCV cdr
ρ
ρ
=
= (4.41)
Noto il coefficiente di portanza, conoscendo le caratteristiche
aerodinamiche del profilo, è possibile risalire all’angolo d’incidenza
necessario. Dalla somma dell’angolo d’incidenza del profilo della pala, , e
dell’angolo della velocità del vento relativo al profilo, si ottiene l’angolo di
calettamento complessivo della pala rispetto al piano di rotazione indicato
con β.
2 mπβ α β⎛= + −⎜⎝ ⎠
⎞⎟ (4.42)
54

Coefficienti di perdita di carico del rotore KR e dello statore Ks
La determinazione dei coefficienti di perdita di carico relativi alla presenza
del rotore e dello statore risulta decisamente complessa in via teorica, in
quanto essa dipende non solo dalle caratteristiche fluidodinamiche
all’interno del condotto, quali ad esempio velocità e pressione, bensì anche
dalla geometria degli elementi interni al condotto e dalle loro
caratteristiche aerodinamiche, nel caso dei profili delle pale della ventola,
e inoltre dalla loro interazione.
Per un completo studio di questi coefficienti è quindi necessaria
un’accurata analisi sperimentale. Esistono tuttavia dei modelli in grado di
predire l’andamento di tali coefficienti in funzione delle caratteristiche del
fan e delle componenti in esso contenute.
E’ possibile esprimere l’andamento del coefficiente KR riferito alla sezione
media della pala indicata con ‘MS’ attraverso la (4.43) [Rif. III].
2cosR D
th L mR MS
K CK C
λβ
⎛ ⎞⎛ ⎞= ⋅⎜⎜ ⎟⎝ ⎠ ⎝ ⎠
⎟ (4.43)
In essa tra gli altri parametri compaiono anche il coefficiente di portanza e
di resistenza della pala e il parametro di flusso.
Il coefficiente di resistenza della pala può essere scomposto in due parti: la
prima, indicata con CDp, relativa al coefficiente di resistenza di profilo, la
seconda correttiva, indicata con CDs, relativa all’iterazione tra le pale e alle
turbolenze caratterizzanti il fluido posteriormente alla ventola.
p sD DC C CD= + (4.44)
55

Il coefficiente CDs, può essere stimato attraverso la (4.45) [Rif. III], dove
compare il coefficiente di portanza del profilo ed un coefficiente correttivo
relativo a fan caratterizzati da regimi di velocità subsonici.
20.018sD LC C= ⋅ (4.45)
Analogamente è possibile stimare il coefficiente di perdita di carico relativo
alla presenza dello statore, KS, attraverso la (4.46) [Rif. III].
2cosS D
th L mS MS
K CK C
λβ
⎛ ⎞⎛ ⎞= ⋅⎜⎜ ⎟⎝ ⎠ ⎝ ⎠
⎟ (4.46)
Tutti i termini della (4.46) sono relativi alle condizioni del flusso d’aria nella
zona dello statore. Anche in questo caso il coefficiente di resistenza può
essere scomposto come nella (4.44). Sempre per un regime di
funzionamento subsonico è consigliato [Rif. III] assegnare i seguenti valori
alle due componenti del coefficiente di resistenza.
2
0.016
0.018p
s
D
D L
C
C C
=
= ⋅ (4.47)
E’ così possibile calcolare i coefficienti di perdita di carico mancanti per il
raggiungimento del valore del salto di pressione complessivo da generare
attraverso la ventola. La determinazione del coefficiente di portanza dei
profili dello statore verrà effettuata nel paragrafo seguente relativo al
progetto dello statore.
Progetto dello statore
Il progetto dello statore viene anch’esso compiuto nelle condizioni di volo a
punto fisso a quota zero. Esso risulta essere funzione solo ed
esclusivamente dell’andamento del coefficiente di swirl, parametro che
56

rappresenta la velocità di swirl all’interno del condotto dopo la ventola.
Poiché il coefficiente di swirl risulta essere definito dalla (4.32), si è in
grado di verificare che esso assume valori massimi proprio in
corrispondenza della condizione di volo a punto fisso, ovvero quando la
trazione da generare è massima ed è quindi massimo anche il coefficiente
del salto di pressione alla ventola Kth. Non essendo ancora definito il valore
dei coefficienti di perdita di carico, in quanto non sono ancora noti alcuni
parametri dipendenti proprio dal profilo dello statore, si stima in prima
approssimazione che il valore dell’efficienza degli organi interni al
condotto, ηT, sia pari a 0.9. Noto il salto di pressione totale da generare
alla ventola, è possibile, attraverso le equazioni introdotte nei paragrafi
precedenti, calcolare l’andamento del coefficiente di swirl dopo la ventola
in funzione della distanza dall’asse di simmetria del condotto, il cui
andamento è riportato in figura 4-4.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Distanza dall'asse di rotazione della ventola [m]
Coe
ffici
ente
di s
wirl
Fig. 4-4 – Andamento del coefficiente di swirl in funzione della distanza dall’asse di rotazione della ventola.
Le specifiche del progetto impongono che all’interno del fan debba passare
il condotto contenente la trasmissione grazie alla quale è possibile mettere
57

in rotazione le ventole. Il condotto delle trasmissioni è circolare ed ha un
diametro esterno di 5.5 cm. Al fine di evitare ulteriori perdite di carico si è
pensato di far passare il condotto della trasmissione all’interno di uno dei
profili dello statore. Se per i profili dello statore si sceglie un rapporto
spessore su corda pari a 0.12, la corda necessaria per contenere la
trasmissione risulta pari a 0.5 m e costante in apertura. Tale lunghezza è
compatibile con le dimensioni del divergente, lungo 0.715 m.
Per quanto riguarda la geometria dello statore si sono utilizzati quattro
elementi uguali tra loro, disposti a croce ed in grado quindi di generare un
flusso perfettamente simmetrico all’uscita del condotto. Non è stato
necessario utilizzare più di quattro elementi, poiché la corda di ogni
elemento risulta già di per sé sufficientemente lunga da garantire un
completo recupero dello swirl prima dell’uscita dal condotto.
Per progettare gli elementi dello statore si consideri la figura 4-5.
Fig. 4-5 – Caratteristiche geometriche degli elementi appartenenti allo statore.
58

Come evidenziato in figura l’angolo di curvatura dell’elemento risulta
essere definito dalla (4.48), dove con β1 e β2 si indicano gli angoli della
velocità del flusso d’aria rispetto all’asse di rotazione prima e dopo lo
statore, con i si indica l’angolo di incidenza locale del bordo d’attacco e con
si indica l’angolo di deviazione al bordo d’uscita.
( ) ( )1 2 iϑ β β δ= − + − (4.48)
L’angolo di deviazione al bordo d’uscita dipende sia da fenomeni di natura
viscosa che da fenomeni di natura non viscosa. Il suo effetto si traduce in
una diminuzione della pendenza della curva del coefficiente di portanza.
Una stima dell’andamento di tale angolo è stata effettuata da Carter [Rif.
VII] dove l’andamento di m funzione di ξ è riportato in figura 4-6.
smc
δ ϑ= (4.49)
0 10 20 30 40 50 60 70 80 900
0.1
0.2
0.3
0.4
0.5
0.6
Stagger Angle [gradi]
m
Fig. 4-6 – Andamento del coefficiente m in funzione dell’angolo ξ.
59

Il valore di ξ che prende il nome di “stagger angle”, può essere ricavato
dalla (4.50).
( )1 2i ϑξ β= − − (4.50)
Dalla combinazione della (4.48) con la (4.49) si ricava la (4.51).
( )1 2
1i
m s cβ β
ϑ− −
=−
(4.51)
Il calcolo dell’angolo θ viene effettuato attraverso due iterazioni. Nella
prima si pone nullo l’angolo d’incidenza locale del bordo d’attacco dello
statore e si assume il coefficiente m pari a 0.26. Tali scelte sono
consigliate da Carter come punto di partenza per il progetto dello statore
[Rif. VIII]. Volendo ottenere un completo recupero degli effetti di swirl è
inoltre necessario imporre che l’angolo β2 sia nullo.
Si perviene quindi alla (4.52).
1
1 0.26 s cβϑ =
− (4.52)
Per il calcolo di β1 si utilizza il coefficiente di swirl calcolato nella zona del
rotore.
( )1 arctan sβ ε= (4.53)
Calcolati i primi valori di θ e ξ si è in grado di iterare il procedimento
risalendo ai valori corretti di m, attraverso la figura 4-6, e di i, attraverso
la figura 4-7 che riporta l’andamento dell’angolo d’incidenza locale
ottimale (definito da Carter come l’angolo per cui è massimo il rapporto tra
la portanza e la resistenza dell’elemento dello statore), del bordo d’attacco
60

in funzione dell’angolo θ che prende il nome di “camber angle”. Anche
questo andamento è stato ricavato in via sperimentale da Carter [Rif. VIII].
Si è quindi in grado attraverso la (4.51) e la (4.50) di calcolare i valori
definitivi di θ e di ξ, riportati rispettivamente nelle figure 4-8 e 4-9. Come
si può notare entrambi gli angoli raggiungono valori massimi in prossimità
del bulbo, dove il coefficiente di swirl assume valori maggiori. Progettando
gli elementi dello statore secondo questi angoli si ottiene un completo
recupero dello swirl e, com’è stato già detto, è possibile trascurare ogni
perdita relativa a questo fenomeno. Resta da determinare il coefficiente di
portanza degli elementi dello statore a metà dell’apertura degli elementi
dello stesso, al fine di poter calcolare il coefficiente di perdita di carico
dello statore KS. Sempre grazie agli studi di Carter si è in grado di
calcolare il coefficiente di portanza in funzione del coefficiente di swirl. Si
ottiene per un coefficiente di swirl pari a circa 0.224 ed un coefficiente di
portanza pari a 0.95 [Rif. VIII].
0 5 10 15 20 25 30 35 40-20
-15
-10
-5
0
5
10
Camber Angle [gradi]
Ang
olo
di in
cide
nza
loca
le o
ttim
ale
del b
ordo
d'a
ttacc
o [g
radi
]
c/s
0.30.60.91.21.5
Fig. 4-7 – Andamento dell’angolo d’incidenza ottimale locale del bordo d’attacco dello statore in funzione dell’angolo θ.
61

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
5
10
15
20
25
30
35
40
Distanza dall'asse di rotazione della ventola [m]
Cam
ber A
ngle
[gra
di]
Fig. 4-8 – Andamento dell’angolo θ in funzione della distanza dall’asse di simmetria del fan.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4
5
6
7
8
9
10
Distanza dall'asse di rotazione della ventola [m]
Sta
gger
Ang
le [g
radi
]
Fig. 4-9 – Andamento dell’angolo ξ in funzione della distanza dall’asse di simmetria del fan.
62

Scelta del profilo aerodinamico delle pale della ventola
La scelta del profilo aerodinamico delle pale deve soddisfare alcuni
requisiti. In particolare è necessario che il profilo aerodinamico sia in
grado di sviluppare elevati coefficienti di portanza, al fine di poter
soddisfare i requisiti di trazione più elevati mantenendosi il più lontano
possibile dalle incidenze di stallo. Il profilo scelto per essere installato
all’interno della ventola intubata è il Clark Y con un rapporto spessore su
corda pari a 0.1. Il Clark Y fa parte dei profili aventi ventre piatto e nei
quali il massimo dello spessore si trova al 30% della corda a partire dal
bordo d’attacco. La pendenza della curva del coefficiente di portanza è 5.7
per ogni radiante di incidenza. A questa stessa categoria di profili
appartengono i RAF 6 e i Göttingen, ma a parità di coefficiente di portanza
entrambe queste categorie di profili sviluppano una maggiore resistenza
aerodinamica avendo un coefficiente di resistenza più alto.
In figura 4-10 è riportato il profilo Clark Y con rapporto spessore su corda
pari a 10%, mentre nelle figure 4-11 e 4-12 sono riportati rispettivamente
gli andamenti delle curve del coefficiente di portanza e del coefficiente di
resistenza.
Fig. 4-10 – Profilo Clark Y avente rapporto t/c pari a 10%.
Dall’analisi dell’andamento dei coefficienti di portanza e resistenza del
profilo Clark Y emerge che l’incidenza alla quale l’efficienza del profilo è
massima è a 5.375°, dove il coefficiente di portanza è pari a 0.9515,
mentre il coefficiente di resistenza è pari a 0.0103.
63

-20 -15 -10 -5 0 5 10 15 20-1
-0.5
0
0.5
1
1.5
2
Angolo di incidenza [gradi]
CL
CL/alphaRilievi sperimentali
Fig. 4-11 – Andamento del coefficiente di portanza del profilo Clark Y in funzione dell’angolo di incidenza.
-20 -15 -10 -5 0 5 10 15 200
0.05
0.1
Angolo di incidenza [gradi]
CD
CD/alphaRilievi sperimentali
Fig. 4-12 – Andamento del coefficiente di resistenza del profilo Clark Y in funzione dell’angolo di incidenza.
64

Progetto delle pale delle ventole
Dopo aver dimensionato il condotto, il bulbo e lo statore ed aver scelto il
profilo aerodinamico da utilizzare, si è finalmente in grado di progettare le
pale delle ventole intubate. La condizione di progetto, come è stato già
detto in precedenza, è quella del volo a punto fisso a quota zero ed ad una
distanza sufficiente dal terreno da annullare completamente l’effetto suolo.
Questa condizione di volo, risulta essere la più onerosa dal punto di vista
della trazione e oltretutto la più pericolosa, in quanto tutte le superfici
aerodinamiche sono inefficaci nel momento in cui la velocità di volo è
nulla e quindi tutta la portanza necessaria al sostentamento del velivolo
deve essere prodotta dai fan. E’ quindi opportuno dimensionare le pale
della ventola, al fine di ottimizzare il funzionamento dei fan in questa
condizione ed il modo migliore di fare ciò è progettare le pale del velivolo in
modo tale da garantire che, nelle condizioni di progetto, l’incidenza dei
profili aerodinamici della ventola sia quella di miglior efficienza, che nel
paragrafo precedente risulta essere pari a 5.375°.
Il primo passo da compiere è il calcolo definitivo del salto di pressione
totale da generare alla ventola nelle condizioni di progetto. Per fare ciò è
necessario calcolare l’efficienza degli elementi interni al condotto ηT
attraverso la (4.15). Il valore dei coefficienti KR e KS si ottiene mediante la
(4.43) e la (4.46). Dopo aver scelto di progettare le pale in modo tale da
garantire il funzionamento dei profili aerodinamici all’incidenza di
massima efficienza, tutti i parametri necessari al calcolo dei coefficienti KR
e KS risultano noti e vengono riportati nella tabella 4-1.
Tabella 4-1 – Coefficienti di calcolo del rendimento degli elementi interni.
KR KS
CDp 0.0103 0.0163
CDs 0.016 0.0162
CL 0.9515 0.9500
65

I coefficienti KR/Kth, KS/Kth e ηT sono riportati nella (4.54).
0.05339
0.02399
0.92261
R
th
S
th
T
KKKKη
=
=
=
(4.54)
Dalla (4.13) il coefficiente del salto di pressione Kth nelle condizioni di
progetto risulta essere pari a 0.6414. Noto il coefficiente del salto di
pressione, restano da determinare il numero delle pale e la geometria delle
stesse, in particolare la corda e lo svergolamento. Il procedimento che ha
portato al raggiungimento dei risultati che verranno esposti qui di seguito
è stato lungo e iterativo e, proprio per questo motivo, viene riportata solo il
progetto finale con tutte le motivazioni che hanno portato alle scelte
principali.
Per prima cosa si consideri il numero delle pale di ogni ventola. La
lunghezza della zona delle ventole, come già detto nel capitolo 2, è pari a
0.2 m. Per riuscire a contenere le pale in questo spazio è necessario che
ognuna di esse abbia una corda massima, che si trova in prossimità del
bulbo, non superiore ai 20 cm, in modo tale da riuscire a restare
all’interno di questa zona anche nelle condizioni più estreme nelle quali
l’angolo tra la pala e l’asse di rotazione della ventola è nullo. Per
mantenere il valore della corda massima delle pale entro questo limite è
necessario aumentarne il numero in ogni ventola. Si è quindi adottata una
soluzione con 8 pale per ogni ventola. Considerando ora il bulbo, che nel
progetto attuale risulta essere dimensionato con un diametro pari al 30%
del diametro della ventola, si osserva che questa soluzione porta ad avere
una circonferenza del bulbo pari a 1.744 m. Avendo deciso di utilizzare 8
pale, lo spazio riservato ad ogni pala in prossimità del bulbo è al massimo
di 0.218m, misura sicuramente compatibile con la precedente scelta di
dimensionare le pale della ventola con una corda massima di 20 cm. Al
66

fine di garantire una distanza minima tra le pale al bulbo, si è scelto un
valore di corda massima pari a 0.1918 m.
Si consideri la geometria della pala. Il valore della corda al bulbo,
corrispondente con la corda massima, è stato appena definito. Restano da
definire l’andamento della corda in funzione della distanza radiale
dall’asse di rotazione della ventola e lo svergolamento. Il metodo di calcolo
descritto nei paragrafi precedenti prevede di partire da una distribuzione
di corda nota e di calcolare il conseguente svergolamento della pala
attraverso il calcolo dell’angolo d’incidenza da mantenere in ogni sezione
della pala. Poiché l’obbiettivo è progettare le ventole al fine di ottenere
nelle condizioni di progetto un funzionamento dei profili delle pale
all’angolo di miglior efficienza, l’andamento della corda viene ricercato
proprio per soddisfare al meglio questa specifica. Bisogna tuttavia tener
presente alcune limitazioni costruttive. Risulta infatti molto complesso
realizzare una pala avente svergolamento e rastremazione non lineari. Per
questo motivo si è scelto di adottare una rastremazione lineare della pala,
mentre lo svergolamento viene calcolato di conseguenza e risulta non
lineare. Adottando una legge lineare si ricava che con un rapporto di
rastremazione pari a 0.578 si riesce ad avvicinare su tutta l’estensione
della pala l’angolo d’incidenza di efficienza massima (si osservino le figure
4-14 e 4-15 riportate e commentate poco più avanti). La geometria in
piano della pala non svergolata è riportata in figura 4-13. La pala risulta
quindi caratterizzata da una corda massima al bulbo pari a 0.1918 m e
una corda minima all’estremità pari a 0.1109 m. Inoltre la geometria
riportata in figura 4-13 mostra come i profili aerodinamici della pala siano
stati allineati ad ¼ della corda. Questo tipo di allineamento garantisce una
più facile fabbricazione della pala stessa, soprattutto quando essa
possiede uno svergolamento non lineare [Rif. II].
67

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
Distanza dall'asse di rotazione della ventola [m]
Cor
da [m
]
Profilo 2D della pala1/4 della corda
Fig. 4-13 – Andamento della corda di una pala della ventola non svergolata in funzione della distanza dall’asse di rotazione della ventola.
Seguendo il procedimento descritto in questo capitolo si perviene quindi
all’andamento del coefficiente di portanza di ogni sezione della pala (fig. 4-
14) ed al conseguente angolo d’incidenza dei profili delle pale della ventola
(fig. 4-15). Come evidenziato da entrambe le figure, non si riesce ad
ottenere con una rastremazione lineare e mantenendo uniforme il salto di
pressione generato da ogni elemento di pala, una perfetta sovrapposizione
tra la linea dell’efficienza massima del Clark Y e l’effettivo angolo di
incidenza del profilo aerodinamico della pala. Tuttavia, dalla figura 4-15,
emerge che la distanza massima tra l’angolo d’incidenza ottimale e quello
ricavato è di circa 1.5° e quindi lungo tutta l’apertura della pala si rimane
in un intorno molto stretto della condizione ottimale. Questo risultato è
quindi decisamente in accordo con le specifiche del progetto e quindi
accettabile.
68

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
Distanza dall'asse di rotazione della ventola [m]
CL
CL palaCL Effmax profilo
Fig. 4-14 – Andamento del coefficiente di portanza delle pale delle ventole in funzione della distanza
dall’asse di rotazione delle ventole.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4
5
6
7
8
9
10
Distanza dall'asse di rotazione della ventola [m]
Ang
olo
d'in
cide
nza
della
pal
a [g
radi
]
Angolo palaAngolo Effmax profilo
Fig. 4-15 – Andamento dell’angolo d’incidenza dei profili aerodinamici delle pale delle ventole intubate in funzione della distanza dall’asse di rotazione delle ventole.
69

In figura 4-16 è riportato infine l’andamento dell’angolo della velocità del
vento relativo e dell’angolo complessivo della pala (frutto della somma
dell’angolo della velocità del vento relativo rispetto al piano di rotazione e
dell’angolo di incidenza del profilo delle pale), rispetto al piano di rotazione
della ventola.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
10
20
30
40
50
60
70
80
90
100
Distanza dall'asse di rotazione della ventola [m]
Ang
olo
di c
alet
tam
ento
risp
etto
al p
iano
di r
otaz
ione
del
la v
ento
la [g
radi
]
Angolo velocità del vento relativoAngolo complessivo
Fig. 4-16 – Andamento dell’angolo della velocità del vento relativo e dell’angolo complessivo della pala, rispetto al piano di rotazione della ventola.
70

Capitolo 5
Analisi delle prestazioni dei fan in funzione del
passo
Dopo aver progettato tutti gli elementi interni del fan, nelle condizioni di
progetto, con valori di trazione, quota e velocità di volo ben definiti, si è
finalmente in grado di studiarne il comportamento in tutte le altre
condizioni di volo. Essendo il velivolo in esame a passo variabile, lo studio
delle diverse condizioni di volo implica una variazione del passo delle pale
delle ventole. E’ quindi possibile studiare per ogni condizione di volo
l’andamento della trazione in funzione del passo.
Per calcolare il passo delle pale relativo a diversi livelli di trazione ed in
ogni condizione di volo, si utilizzano le stesse equazioni viste nel capitolo 4
inserite in un opportuno ciclo iterativo e con qualche modifica.
Il primo passo del procedimento prevede la scelta di una condizione di volo
caratterizzata da quota, velocità di volo e trazione richiesta. Con un
procedimento del tutto analogo a quello seguito nel secondo paragrafo del
capitolo 4, si è in grado di calcolare pressione e velocità in ogni sezione del
condotto, oltre alla portata in massa complessiva richiesta. E’ quindi noto,
a meno dell’efficienza degli organi interni, il salto di pressione complessivo
da generare. Essendo impossibile calcolare l’efficienza degli organi interni
senza conoscere il coefficiente di swirl necessario per il calcolo dell’angolo
βm, è necessario per il primo ciclo iterativo effettuare una stima attendibile
dell’efficienza ηT, ponendola arbitrariamente pari a 0.9. Per i cicli
successivi il valore di ηT sarà calcolato attraverso i valori del coefficiente di
swirl del ciclo precedente. Questa approssimazione non produce gravi
71

errori, in quanto le variazioni di ηT ad ogni ciclo sono minime e lo scarto di
un ciclo tra un calcolo e il successivo non influenza i risultati ottenuti.
Noto il salto di pressione complessivo da generare e di conseguenza il
coefficiente Kth, è possibile calcolare il coefficiente di swirl e l’angolo della
velocità del vento relativo rispetto alle pale.
E’ a questo punto necessario scegliere la condizione di partenza da
utilizzare al primo ciclo, ovvero il calettamento delle pale iniziale. Lo
svergolamento della pala è noto dal progetto del capitolo precedente. Un
buon criterio consiste nel considerare la sezione intermedia della pala,
indicata nel capitolo 4 con ‘MS’, e calettare la pala in tale sezione
esattamente come la velocità del vento relativo in quel tratto (in questo
modo l’angolo d’incidenza delle pale in quel tratto sarà nullo). Così facendo
si parte sempre da una condizione intermedia e le iterazioni necessarie a
raggiungere il calettamento finale diminuiscono notevolmente.
Da questo punto in poi si segue un procedimento inverso rispetto a quello
del capitolo 4. Il coefficiente di swirl ed i parametri βm, Vm e λ risultano
noti dalle equazioni (4.32), (4.38), (4.39) e (4.30). Dall’andamento dello
svergolamento confrontato con il calettamento scelto e con l’angolo βm è
possibile ricavare l’angolo d’incidenza di ogni elemento di pala, dal quale si
può risalire al relativo coefficiente di portanza.
Per il calcolo del coefficiente di resistenza si consideri la (4.40). Esprimendo
i termini Y e T si ricava la (5.1).
( ) ( )22 sin coss m TOTD s V dr s P dr mρ ε β β= − ∆ (5.1)
Dividendo per ½ρV2cdr si ottiene il coefficiente di resistenza.
( ) ( )2
22 22 sin cosTOT
D s mm m
PVsCc V V
ε β βρ
⎛ ⎞∆= −⎜
⎝ ⎠m ⎟ (5.2)
72

Sostituendo nella (5.2) la (4.39) ed esprimendo il salto di pressione totale in
funzione del coefficiente Kth si ottiene la (5.3).
( ) ( ) ( )22 cos sin cos2th
D s m mKsC
cε β β β⎛ ⎞= −⎜ ⎟⎝ ⎠
3m (5.3)
Si perviene infine alla (5.4), che permette di calcolare il coefficiente di
resistenza in funzione di parametri noti.
( ) ( )(3cos 2 tan )D m s m tsCc
β ε β= ⋅ − hK (5.4)
Noti i coefficienti di portanza e resistenza è possibile risalire alla portanza
e alla resistenza di ogni elemento di pala. Invertendo la (4.40), è possibile
calcolare la trazione T.
Attraverso la (5.5), è quindi possibile calcolare il salto di pressione
complessivo prodotto da tutti gli elementi di pala aventi la medesima
distanza radiale dall’asse di rotazione.
TOTTP
sdr∆ = (5.5)
Per calcolare il salto di pressione complessivo prodotto da tutta la ventola
è necessario eseguire la media tra tutti i salti di pressione prodotti in ogni
anello1.
Noto il salto di pressione della ventola si confronta il salto di pressione
calcolato con il salto di pressione necessario a produrre la trazione
richiesta. A seconda che esso sia maggiore o minore si varia il
1 L’anello è una sottosezione della sezione della ventola nel quale sono compresi tutti gli elementi di pala aventi la medesima distanza radiale dall’asse di rotazione. Esso ha uno spessore infinitesimo con una circonferenza minore interna di raggio r e una circonferenza maggiore esterna di raggio r+dr.
73

calettamento della pala e si reitera il calcolo. Il ciclo iterativo termina
quando la differenza tra il salto di pressione calcolato e il salto di
pressione necessario è inferiore ai 5 Pa.
Analisi dello stallo delle pale
Nel procedimento descritto nel paragrafo precedente non si è accennato al
caso nel quale le pale superino l’incidenza di stallo, con una conseguente
riduzione delle prestazioni aerodinamiche della ventola. Al fine di tener in
considerazione la presenza dei fenomeni di stallo ad ogni ciclo iterativo si
verifica se uno o più elementi di pala superino le incidenze di stallo. Per il
profilo Clark Y, la cui curva di portanza è riportata in figura 4-11, si
verifica che lo stallo ad incidenza positiva avviene a 14°, mentre lo stallo
ad incidenza negativa è a -8°. Finché le pale restano in questo intervallo
d’incidenze non vi sono correzioni da effettuare. Nel momento in cui uno o
più elementi di pala escono da questo intervallo le prestazioni
aerodinamiche dei profili si riducono rapidamente.
Al fine di non effettuare stime eccessivamente pessimistiche si è scelto di
considerare ancora portante (o deportante) l’elemento di pala, se esso non
supera di più di 2° l’intervallo d’incidenze nelle quali il profilo non stalla.
In questo piccolo intervallo, per quanto riguarda i coefficienti di portanza e
di resistenza dell’elemento di pala, si sono seguite le curve riportate in
figura 4-11 e 4-12. In questo modo il calo di prestazioni viene
correttamente rappresentato dal calo del coefficiente di portanza (nel caso
di profilo portante, mentre per un profilo deportante si ha un aumento del
coefficiente di portanza) e dall’aumento della resistenza.
Nel caso in cui il profilo si trovi a superare anche questo ridotto margine
di 2° si è invece scelto di considerare nullo il salto di pressione prodotto
dall’elemento di pala corrispondente.
74

Calcolo del passo e dei coefficienti di trazione e di coppia della
ventola
Al termine del ciclo iterativo è possibile calcolare per ogni condizione di
volo il passo delle pale da adottare. Il passo è definito dalla (5.6) dove β è
definito dalla (4.42).
( )75% 75%2 tanp rπ β= (5.6)
Con il pedice 75% si indica la sezione della pala nella quale
convenzionalmente si usa calcolare il passo.
Assieme al passo è possibile calcolare il coefficiente di trazione, CT, e il
corrispondente coefficiente di coppia, CC, definiti nella (5.7) dove con ΩMAX
si intende la velocità angolare riferita al numero di giri massimo stabilito
nel capitolo 4.
( )
( )
2 2
2 3
12
12
T
MAX tip tip
C
MAX tip tip
TCR R
CCR R
ρ π
ρ π
=Ω
=Ω
(5.7)
Si è finalmente in grado di analizzare l’andamento dei diversi coefficienti in
funzione della velocità di volo, della quota e del passo.
75

Andamento dei coefficienti caratteristici in diverse configurazioni
di volo a quota zero
A quota zero gli andamenti del coefficiente di coppia in funzione del
coefficiente di trazione sono riportati nelle figure 5-1 e 5-2. La differenza
tra i due grafici è che nel primo si considera il coefficiente di trazione
sviluppato dal solo rotore, senza tener in considerazione il contributo
derivante dal condotto, mentre nel secondo si considera il coefficiente di
trazione complessivo del fan che tiene in considerazione gli effetti dovuti
alla presenza sia del condotto che della ventola.
Si può notare come la presenza del condotto induca un notevole
incremento della trazione prodotta a basse velocità, mentre ad alte velocità
l’incremento di trazione si riduce notevolmente. Questo prova l’effettivo
vantaggio di costruire il condotto attorno alla ventola per un velivolo
destinato a volare prevalentemente a basse velocità ed a punto fisso.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.05
0.1
0.15
0.2
0.25
Coefficiente di coppia
Coe
ffici
ente
di t
razi
one
svilu
ppat
o da
l sol
o ro
tore
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-1 – Andamento del coefficiente di trazione della sola ventola in funzione del coefficiente di coppia a quota zero.
76

0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Coefficiente di coppia
Coe
ffici
ente
di t
razi
one
com
ples
sivo
del
fan
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-2 – Andamento del coefficiente di trazione complessivo del fan in funzione del coefficiente di
coppia a quota zero.
In figura 5-3 è riportato l’andamento della potenza richiesta ai propulsori
in funzione della trazione complessiva prodotta dal fan. Il grafico è riferito
ad un singolo fan. La linea orizzontale tratteggiata si riferisce al limite di
potenza disponibile massimo per ogni fan. Al di sopra di questa linea il
volo risulta impossibile per mancanza di potenza e sarebbe praticabile solo
se si disponesse di propulsori più potenti.
Analizzando l’andamento delle curve si può notare come nel volo a punto
fisso la trazione che si è in grado di sviluppare con ogni fan è molto
maggiore dei 10220 N di progetto e raggiunge quasi i 18000 N.
Confrontando l’andamento della resistenza aerodinamica del velivolo
riportato in figura 3-8 con l’andamento della trazione in funzione della
potenza necessaria, si nota come la trazione prodotta dai fan è sufficiente
a superare i 400 km/h ma non a raggiungere i 500 km/h.
77

0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
0
500
1000
1500
2000
2500
Trazione [N]
Pot
enza
nec
essa
ria [H
p]
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-3 – Andamento della potenza necessaria in funzione della trazione prodotta a quota zero.
Nelle figure 5-4 e 5-5 sono riportati in funzione del passo, rispettivamente
gli andamenti della trazione e del coefficiente di trazione.
Nelle figure 5-6 5-7 e 5-8 vengono riportati gli andamenti rispettivamente
del coefficiente di coppia e della coppia torcente in funzione del passo e
dell’efficienza degli organi interni in funzione della trazione prodotta. Per
quanto riguarda quest’ultimo si nota come l’efficienza oscilli
prevalentemente tra 0.8 e 0.93, raggiungendo un picco proprio vicino alla
trazione di progetto pari a 10220 N. Inoltre al crescere della velocità di
volo, l’efficienza degli organi interni tende a diminuire anche se in misura
relativamente piccola.
78

0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 10
4
Passo [m]
Traz
ione
[N]
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-4 – Andamento della trazione prodotta da un singolo fan in funzione del passo delle pale a quota zero.
0 2 4 6 8 10 12 14 16 18 200
0.1
0.2
0.3
0.4
0.5
Passo [m]
Coe
ffici
ente
di t
razi
one
com
ples
sivo
del
fan
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-5 – Andamento del coefficiente di trazione complessivo prodotto da un singolo fan in funzione del passo delle pale a quota zero.
79

0 2 4 6 8 10 12 14 16 18 200
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Passo [m]
Coe
ffici
ente
di c
oppi
a
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-6 – Andamento del coefficiente di coppia in funzione del passo della ventola a quota zero.
0 2 4 6 8 10 12 14 16 18 200
2000
4000
6000
8000
10000
12000
Passo [m]
Cop
pia
torc
ente
[N x
m]
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-7 – Andamento della coppia torcente in funzione del passo della ventola a quota zero.
80

0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Trazione [N]
Effi
cien
za d
egli
orga
ni in
tern
i (st
ator
e,ro
tore
)
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-8 – Andamento dell’efficienza degli organi interni in funzione della trazione prodotta a quota zero.
Per quanto riguarda lo stallo, nel volo a punto fisso esso si verifica
solamente a trazioni molto basse inferiori ai 1000 N o a trazioni
elevatissime e superiori ai 19000 N e quindi ininfluenti dal punto di vista
delle prestazioni, come si può osservare dalla figura 5-9 dove per ogni
trazione viene evidenziato se le pale o alcune parti di esse si trovano in
condizione di stallo.
Per quanto riguarda velocità di volo superiori (fig. 5-10 e 5-11) lo stallo
comincia a presentarsi a 300 km/h, ma a trazioni nettamente superiori a
quelle necessarie al volo in quelle condizioni, trazioni che anche per
limitazioni di potenza risultano irraggiungibili.
Per questo motivo si può affermare che il velivolo a quota zero è in grado di
raggiungere e superare senza problemi di alcun tipo i 400 km/h e solo le
limitazioni di potenza gli impediscono di raggiungere i 500 km/h.
81
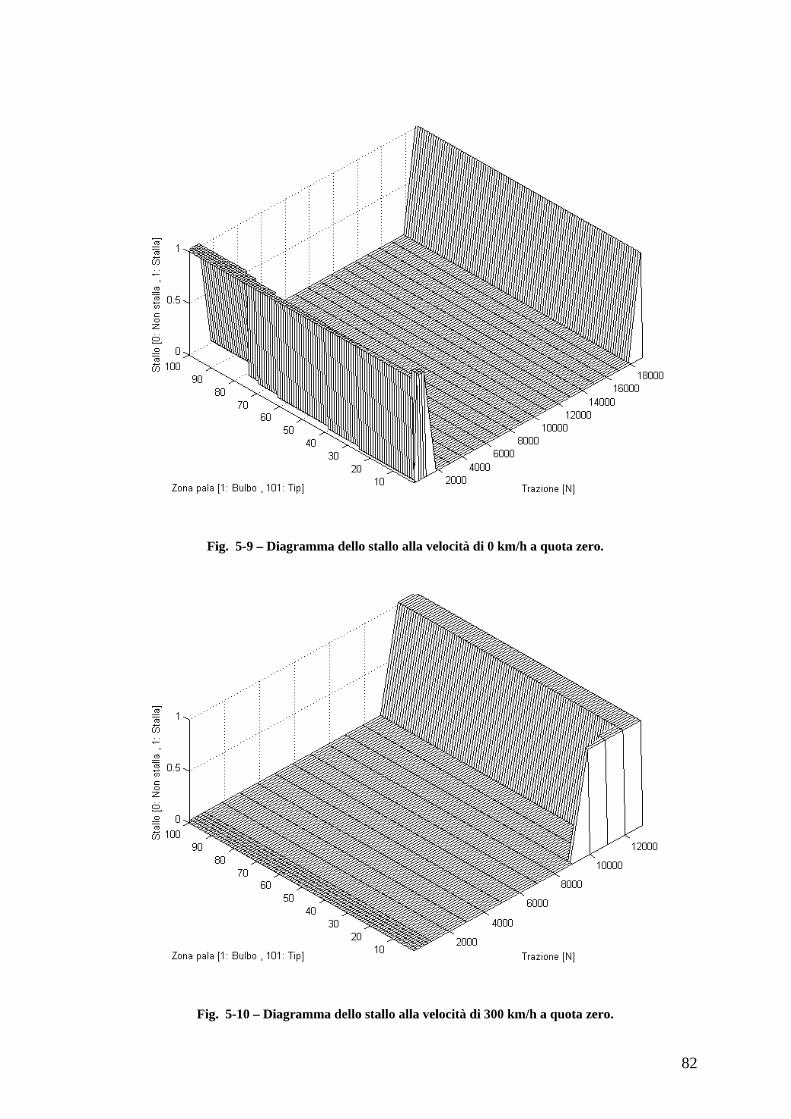
Fig. 5-9 – Diagramma dello stallo alla velocità di 0 km/h a quota zero.
Fig. 5-10 – Diagramma dello stallo alla velocità di 300 km/h a quota zero.
82

Fig. 5-11 – Diagramma dello stallo alla velocità di 400 km/h a quota zero.
Andamento dei coefficienti caratteristici in diverse configurazioni
di volo a 2000 m di quota
Salendo a 2000 m di quota, che per il velivolo in esame rappresenta la
quota di crociera, l’andamento del coefficiente di trazione in funzione del
coefficiente di coppia varia come riportato nelle figure 5-12 e 5-13. In
realtà le curve assomigliano molto a quelle a quota zero, anche se si può
notare un leggero calo del coefficiente di coppia a parità di coefficiente di
trazione.
In figura 5-14 è riportato l’andamento della potenza necessaria dai
propulsori in funzione della trazione prodotta. Si può notare come, per il
volo a punto fisso, la massima trazione prodotta sia calata fino a
raggiungere circa i 15000 N, comunque ancora sufficienti per sollevare il
velivolo a pieno carico. In generale, per tutte le condizioni di volo, i picchi
83

di trazione prodotta sono scesi ma è scesa anche e soprattutto la potenza
necessaria per produrre una stessa trazione. Questo permette al velivolo
di raggiungere velocità di volo superiori ma tuttavia ancora di poco
inferiori ai 500 km/h.
Le figure 5-15, 5-16, 5-17 e 5-18 rappresentano gli andamenti, in funzione
del passo, rispettivamente della trazione, del coefficiente di trazione, della
coppia torcente e del coefficiente di coppia torcente. Infine in figura 5-19 è
riportato l’andamento dell’efficienza degli organi interni in funzione della
trazione prodotta, andamento che assomiglia molto a quello relativo a
quota zero.
Per quanto riguarda lo stallo dalla figura 5-20 si può osservare che, per il
volo a punto fisso, esso si verifica solamente sotto i 1000 N o oltre i 16000
N e quindi non compromette in alcun modo le prestazioni a punto fisso del
velivolo. Aumentando la velocità di volo si può osservare come un stallo
parziale della pala vicino al bulbo compaia solo dai 300 km/h (fig. 5-21)
aumentando progressivamente quando si raggiungono i 400 km/h (fig. 5-
22).
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.05
0.1
0.15
0.2
0.25
Coefficiente di coppia
Coe
ffici
ente
di t
razi
one
svilu
ppat
o da
l sol
o ro
tore
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-12 – Andamento del coefficiente di trazione della sola ventola in funzione del coefficiente di coppia alla quota di 2000 m.
84

0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Coefficiente di coppia
Coe
ffici
ente
di t
razi
one
com
ples
sivo
del
fan
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-13 – Andamento del coefficiente di trazione complessivo del fan in funzione del coefficiente di
coppia a 2000 metri di quota.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
0
500
1000
1500
2000
2500
Trazione [N]
Pot
enza
nec
essa
ria [H
p]
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-14 – Andamento della potenza necessaria in funzione della trazione prodotta alla quota di 2000 m.
85

0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 10
4
Passo [m]
Traz
ione
[N]
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-15 – Andamento della trazione prodotta da un singolo fan in funzione del passo delle pale alla
quota di 2000 m.
0 2 4 6 8 10 12 14 16 18 200
0.1
0.2
0.3
0.4
0.5
Passo [m]
Coe
ffici
ente
di t
razi
one
com
ples
sivo
del
fan
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-16 – Andamento del coefficiente di trazione complessivo prodotto da un singolo fan in funzione del passo delle pale alla quota di 2000 m.
86

0 2 4 6 8 10 12 14 16 18 200
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Passo [m]
Coe
ffici
ente
di c
oppi
a
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-17 – Andamento del coefficiente di coppia in funzione del passo della ventola alla quota di 2000 m.
0 2 4 6 8 10 12 14 16 18 200
2000
4000
6000
8000
10000
12000
Passo [m]
Cop
pia
torc
ente
[N x
m]
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-18 – Andamento della coppia torcente in funzione del passo della ventola alla quota di 2000 m.
87
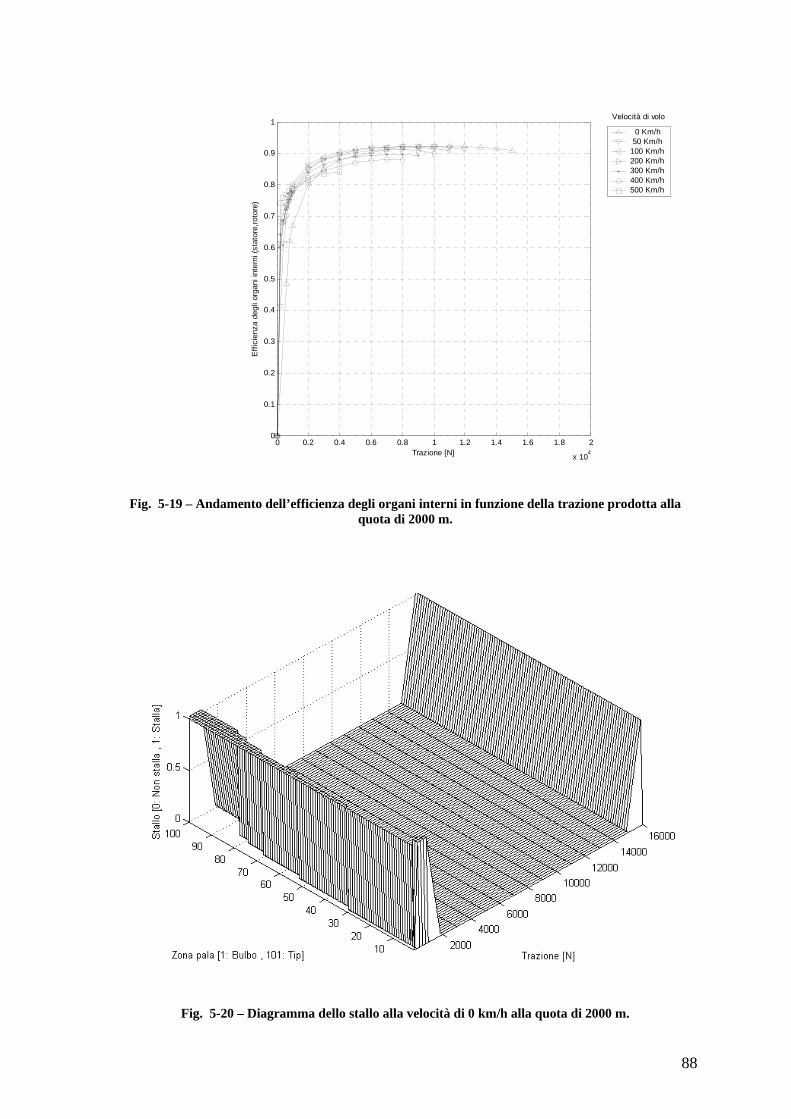
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Trazione [N]
Effi
cien
za d
egli
orga
ni in
tern
i (st
ator
e,ro
tore
)
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-19 – Andamento dell’efficienza degli organi interni in funzione della trazione prodotta alla quota di 2000 m.
Fig. 5-20 – Diagramma dello stallo alla velocità di 0 km/h alla quota di 2000 m.
88

Fig. 5-21 – Diagramma dello stallo alla velocità di 300 km/h alla quota di 2000 m.
Fig. 5-22 – Diagramma dello stallo alla velocità di 400 km/h alla quota di 2000 m.
89

Andamento dei coefficienti caratteristici in diverse configurazioni
di volo a 4000 m di quota
Raggiungendo i 4000 m di quota, che per il velivolo in esame
rappresentano la massima quota di volo prevista2, l’andamento del
coefficiente di trazione in funzione del coefficiente di coppia varia come
riportato nelle figure 5-23 e 5-24. Anche in questo caso le curve
assomigliano molto a quelle a quota zero e 2000 m e persiste l’andamento
decrescente del coefficiente di coppia in funzione di quello di trazione
all’aumentare della quota.
In figura 5-25 è riportato l’andamento della potenza necessaria dai
propulsori in funzione della trazione prodotta. Si può notare come, per il
volo a punto fisso, la massima trazione prodotta sia calata fino a
raggiungere circa i 12000 N, comunque ancora sufficienti per sostentare il
velivolo a pieno carico. Per tutte le condizioni di volo i picchi di trazione
prodotta sono scesi, ma è scesa anche e soprattutto la potenza necessaria
per produrre una stessa trazione. A questa quota si riesce finalmente a
raggiungere la velocità di 500 km/h in quanto la resistenza aerodinamica
prodotta è pari a circa 6200 N, mentre la trazione massima è di 6800 N
complessivamente prodotta dalle 4 ventole intubate. Risulta quindi
soddisfatta la specifica che prevede di raggiungere in quota una velocità di
volo di almeno 500 km/h.
Le figure 5-26, 5-27, 5-28 e 5-29 rappresentano gli andamenti, in funzione
del passo, rispettivamente della trazione, del coefficiente di trazione, della
coppia torcente e del coefficiente di coppia torcente. Infine in figura 5-30 è
riportato l’andamento dell’efficienza degli organi interni in funzione della
trazione prodotta, andamento che assomiglia molto a quello delle quote
inferiori.
Per quanto riguarda lo stallo, analogamente alle quote precedenti, dalla
figura 5-31 si può osservare che per il volo a punto fisso esso si verifica 2 La quota di tangenza teorica è superiore ai 4000 m, ma per motivi di diversa natura quali, ad esempio, la mancanza di pressurizzazione all’interno del velivolo ed il numero di giri minimo imposto alla ventola necessario a rispettare un regime subsonico, la quota di tangenza pratica risulta essere questa.
90

solamente sotto i 1000 N o oltre i 12000 N e quindi non compromette in
alcun modo le prestazioni a punto fisso del velivolo. E’ stata quindi
soddisfatta un’altra importante specifica del progetto che prevede il volo a
punto fisso fino ai 4000 m.
Aumentando la velocità di volo si può osservare come un stallo parziale
della pala vicino al bulbo compaia, analogamente ai 2000 m, solo dai 300
km/h (fig. 5-32) aumentando progressivamente quando si raggiungono i
400 km/h (fig. 5-33) ed i 500 km/h (fig. 5-34). A quest’ultima velocità di
volo si può notare come uno stallo parziale sia sempre presente, anche se
esso non compromette le prestazioni del velivolo, che quindi riesce a
sviluppare fino a 2000 N per ogni fan senza problemi.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.05
0.1
0.15
0.2
0.25
Coefficiente di coppia
Coe
ffici
ente
di t
razi
one
svilu
ppat
o da
l sol
o ro
tore
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-23 – Andamento del coefficiente di trazione della sola ventola in funzione del coefficiente di coppia alla quota di 4000 m.
91

0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Coefficiente di coppia
Coe
ffici
ente
di t
razi
one
com
ples
sivo
del
fan
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-24 – Andamento del coefficiente di trazione complessivo del fan in funzione del coefficiente di coppia a 4000 metri di quota.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
0
500
1000
1500
2000
2500
Trazione [N]
Pot
enza
nec
essa
ria [H
p]
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-25 – Andamento della potenza necessaria in funzione della trazione prodotta alla quota di
4000 m.
92

0 2 4 6 8 10 12 14 16 18 200
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2x 10
4
Passo [m]
Traz
ione
[N]
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-26 – Andamento della trazione prodotta da un singolo fan in funzione del passo delle pale alla quota di 4000 m.
0 2 4 6 8 10 12 14 16 18 200
0.1
0.2
0.3
0.4
0.5
Passo [m]
Coe
ffici
ente
di t
razi
one
com
ples
sivo
del
fan
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-27 – Andamento del coefficiente di trazione complessivo prodotto da un singolo fan in funzione del passo delle pale alla quota di 4000 m.
93

0 2 4 6 8 10 12 14 16 18 200
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Passo [m]
Coe
ffici
ente
di c
oppi
a
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-28 – Andamento del coefficiente di coppia in funzione del passo della ventola alla quota di 4000 m.
0 2 4 6 8 10 12 14 16 18 200
2000
4000
6000
8000
10000
12000
Passo [m]
Cop
pia
torc
ente
[N x
m]
Velocità di volo 0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-29 – Andamento della coppia torcente in funzione del passo della ventola alla quota di 4000 m.
94

0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
x 104
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Trazione [N]
Effi
cien
za d
egli
orga
ni in
tern
i (st
ator
e,ro
tore
)
Velocità di volo
0 Km/h 50 Km/h100 Km/h200 Km/h300 Km/h400 Km/h500 Km/h
Fig. 5-30 – Andamento dell’efficienza degli organi interni in funzione della trazione prodotta alla quota di 4000 m.
Fig. 5-31 – Diagramma dello stallo alla velocità di 0 km/h alla quota di 4000 m.
95

Fig. 5-32 – Diagramma dello stallo alla velocità di 300 km/h alla quota di 4000 m.
Fig. 5-33 – Diagramma dello stallo alla velocità di 400 km/h alla quota di 4000 m.
96

Fig. 5-34 – Diagramma dello stallo alla velocità di 500 km/h alla quota di 4000 m.
97

Capitolo 6
Conclusioni
Il progetto preliminare compiuto nei capitoli precedenti, porta alla
realizzazione di quattro fan, che in via teorica sono in grado di soddisfare
tutte le specifiche desiderate. Prima di trarre qualsiasi conclusione è
necessario ricordare che le stime prodotte in alcune fasi del progetto sono
frutto di semplificazioni, modellazioni e approssimazioni, che per quanto
derivanti da ragionamenti e considerazioni corrette potrebbero differire dai
valori reali, misurabili solo sperimentalmente (in particolare per quanto
riguarda la stima della resistenza del velivolo completo).
Grazie alle caratteristiche alle quattro ventole intubate progettate il
velivolo è in grado di volare, in sicurezza, a punto fisso fino ad almeno
4000 m di quota in condizione di pieno carico, che corrisponde ad un peso
complessivo di 4000 kg. In hover la trazione massima sviluppabile dai
quattro fan a quota zero è pari a circa 70000 N, mentre a 4000 m essa si
riduce a 46000 N, comunque sufficienti a volare in tranquillità con un
margine di sicurezza. L’esubero di trazione rende inoltre possibile la
conversione dal volo a punto fisso al volo avanzato e viceversa.
Il progetto delle pale è stato compiuto al fine di ottimizzare le prestazioni
delle ventole nel volo a punto fisso a quota zero, condizione nella quale le
pale si trovano lungo tutta la loro apertura in prossimità dell’incidenza di
miglior efficienza (fig. 4-15), che per il profilo scelto, un Clark Y con
spessore massimo pari al 10% della corda, corrisponde a 5.375°.
Per quanto riguarda lo statore esso è stato progettato per essere in grado
di recuperare completamente gli effetti di swirl in ogni condizione di volo
ed in particolare nella condizione di volo a punto fisso dove il coefficiente
98

di swirl è maggiore rispetto ad ogni altra condizione di volo. Lo statore
risulta composto da quattro elementi aventi corda costante e pari a 0.5 m
e spessore massimo pari al 12% della lunghezza della corda. Questo
consente di alloggiare all’interno di uno di essi l’organo di trasmissione
diretto alla ventola, senza che esso penalizzi in alcun modo le prestazioni
aerodinamiche all’interno del condotto.
Riguardo al volo avanzato il velivolo è in grado di raggiungere e superare i
500 km/h solo alla quota di 4000 m (che si ricorda essere la massima
quota di volo prevista per il velivolo in questione) ed in regime di massima
potenza; in tale condizione va tuttavia evidenziato che si verifica lo stallo
di una porzione di pala pari a meno del 5% della lunghezza della pala
stessa, stallo che, seppur incrementando la resistenza prodotta in
prossimità della ventola, non compromette in alcun modo il volo del
velivolo e le sue prestazioni. Va inoltre ricordato che per un’analisi
completa del comportamento delle pale ad alte incidenze sono necessarie
prove sperimentali che confortino gli andamenti riportati nelle figure 4-11
e 4-12, sui quali sono basati i calcoli effettuati. A quote inferiori il velivolo
raggiunge e supera agevolmente i 400 km/h; alla quota di crociera,
corrispondente a 2000 m, il velivolo raggiunge e supera anche i 450 km/h.
I condotti sono caratterizzati da una lunghezza pari a 1.1925 m, mentre il
diametro della sezione nella quale è alloggiata la ventola è pari a 1.85 m.
Il diametro massimo del bulbo, situato in prossimità del rotore, è pari al
30% del diametro del condotto in tale sezione; esso consente di alloggiare
al suo interno tutti gli organi necessari al corretto funzionamento della
ventola.
Inoltre i fan anteriori sono posizionati in prossimità della fusoliera, mentre
quelli posteriori sono posti alle estremità alari, questo per ridurre al
minimo l’interferenza di scia tra di essi ed evitare che le prestazioni dei fan
posteriori siano negativamente condizionate da disturbi dovuti alla
presenza dei fan anteriori.
99

Va infine sottolineato come il progetto dei quattro fan sia unico e non vi
sia quindi alcuna differenza strutturale tra i fan anteriori e quelli
posteriori; questo fattore facilita la realizzazione delle componenti
necessarie in sede costruttiva.
Le quattro ventole intubate sono quindi dimensionate e progettate
compatibilmente con tutte le specifiche del progetto preliminare e
consentono al velivolo di compiere agevolmente tutte le fasi di volo che lo
caratterizzano.
100

Appendice A1
Progetti alternativi del divergente del fan
Nel capitolo 2 si è già accennato all’esistenza di alcune alternative al
progetto corrente che prevede un divergente di forma semplicemente
circolare. Tali alternative consentono di ottenere rapporti d’espansione del
parametro σ decisamente più elevati a parità di dimensioni della sezione
della ventola. Nel progetto attuale, dovendo soddisfare la specifica di
mantenere le potenze necessarie inferiori ai 900 hp per ogni ventola, si è
dovuti ricorrere ad un diametro del disco rotore di 1.85 m, che comporta
ingombri notevoli, sia dal punto di vista strutturale, che dal punto di vista
aerodinamico, in quanto in volo avanzato (ma anche in transizione dal
volo a punto fisso al volo avanzato) si ha a che fare con un’enorme
resistenza aerodinamica dei condotti, che limita le prestazioni del velivolo.
Se si riuscisse ad ottenere una geometria sviluppata in lunghezza e non in
larghezza, riducendo quindi il diametro della ventola e allungando il
condotto, si ridurrebbe notevolmente la resistenza aerodinamica di
avanzamento del velivolo, migliorandone sensibilmente le prestazioni.
Come si è potuto constatare nel capitolo 2 (in particolare in figura 2-9),
con una geometria a divergente semplicemente circolare allungare il fan
porta a scarsi miglioramenti dal punto di vista della potenza necessaria,
senza considerare il fatto che a parità di angolo di divergenza ci si
allontana progressivamente dal rapporto ottimale tra la lunghezza del
divergente e il diametro della ventola.
Per ridurre le dimensioni del condotto e quindi del rotore, mantenendo
entro certi limiti il valore di potenza necessaria, è essenziale aumentare il
parametro d’espansione σ, che si ricorda essere definito dalla (2.1). Ciò è
possibile aumentando l’area d’efflusso del divergente, il che equivale a
101

cambiare sostanzialmente la geometria del divergente stesso. L’obbiettivo
che ci si pone è quindi quello di aumentare il rapporto d’espansione al fine
di avere valori di potenza necessaria accettabili, ma con dimensioni
contenute del diametro della ventola in modo tale da ridurre la resistenza
aerodinamica dei fan.
Per l’analisi si consideri per ora la sola zona del divergente. S’immagini in
prima approssimazione di avere un divergente circolare a sezione costante
(angolo di divergenza nullo). Supponendo di sezionare il condotto a 22.5°,
angolo per il quale si è in grado di generare una spinta diretta a 45°
rispetto all’asse passante per la ventola1, si ottiene la geometria riportata
in figura A1-1 dove D2 e D4 sono rispettivamente il diametro nella sezione
del rotore e l’asse maggiore dell’ellisse nella sezione d’efflusso.
Fig. A1-1 – Divergente semplice a sezione circolare costante con ugello sezionato a 45°.
Con questa soluzione molto semplice, l’area d’efflusso aumenta e si ottiene
un rapporto d’espansione, σ, maggiore di uno, anche se tuttavia
decisamente ridotto come si può osservare dal calcolo riportato qui di
seguito.
2
22
2
1.0823cos(22.5 )
rr
πσπ
= =°
1 Supponendo di avere una forza e di volerla deviare di 45°, disegnando i due vettori si nota come per effettuare ciò sia necessario applicare una forza diretta a 22.5° e quindi i deviatori di flusso devono essere allineati a 22.5°.
102

Per migliorare ulteriormente il rapporto d’espansione, σ, si supponga di
aggiungere al divergente prima dell’ugello a 22.5° una zona d’espansione
conica, con angolo di divergenza pari a quello assunto nel progetto del
capitolo 2, ovvero 8° (fig. A1-2).
Fig. A1-2 – Divergente a sezione circolare con zona di espansione conica e ugello sezionato a 45°.
Questa soluzione porta ad un notevole incremento del parametro
d’espansione, σ, che diventa funzione, oltre che del diametro all’inizio del
divergente, anche della lunghezza della zona d’espansione conica, come si
può osservare in figura A1-3.
Mantenendo tutte le considerazioni effettuate nel capitolo 2 riguardanti il
diametro del bulbo, il raggio di curvatura del convergente e la lunghezza
della zona del rotore, si è in grado di esprimere l’andamento del parametro
d’espansione, σ, in funzione della lunghezza complessiva del fan e del
diametro della ventola riportato in figura A1-4.
Si può osservare come il parametro d’espansione, σ, risulta crescere
notevolmente in funzione della lunghezza totale del fan e ciò consente di
ottenere valori di potenza necessaria contenuti anche con dimensioni
inferiori del diametro della ventola.
103

0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 21
1.2
1.4
1.6
1.8
2
2.2
2.4
2.6
2.8
3
Lunghezza della zona di espansione conica a 8° [m]
Sig
ma
Diametro della ventola
1.15 m 1.2 m1.25 m 1.3 m1.35 m 1.4 m1.45 m 1.5 m1.55 m 1.6 m
Fig. A1-3 – Andamento del parametro d’espansione in funzione della lunghezza della zona d’espansione conica a 8° e del diametro della ventola.
1.8 2 2.2 2.4 2.6 2.8 3 3.21
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
Lunghezza totale del fan [m]
Sig
ma
Diametro della ventola
1.15 m 1.2 m1.25 m 1.3 m1.35 m 1.4 m1.45 m 1.5 m1.55 m 1.6 m
Fig. A1-4 – Andamento del parametro di espansione in funzione della lunghezza totale del fan e del diametro della ventola.
104

In figura A1-5 è riportato l’andamento della potenza necessaria per il volo
a punto fisso alla quota di 4000 m ed a pieno carico. È evidente come si
riescano a mantenere potenze necessarie inferiori agli 800 hp anche con
diametri inferiori a 1.4 m. Va detto inoltre che la lunghezza totale a cui si
riferiscono i grafici è riferita alla dimensione massima del condotto, ovvero
quella della zona superiore dello stesso dove è presente il prolungamento
dovuto al fatto che l’area d’efflusso è sezionata a 22.5°. Nella zona inferiore
il condotto risulta notevolmente più corto.
1.8 2 2.2 2.4 2.6 2.8 3 3.2500
600
700
800
900
1000
1100
Lunghezza totale del fan [m]
Pot
enza
nec
essa
ria a
ll'al
bero
[Hp]
Diametro della ventola
1.15 m 1.2 m1.25 m 1.3 m1.35 m 1.4 m1.45 m 1.5 m1.55 m 1.6 m
Fig. A1-5 – Andamento della potenza necessaria per il volo a punto fisso alla quota di 4000 m ed a pieno carico in funzione della lunghezza totale del fan e del diametro della ventola.
Per diminuire ulteriormente le dimensioni dei condotti dei fan,
riducendone sia l’ingombro sia la resistenza aerodinamica, è possibile
apportare un’ulteriore modifica alla geometria dell’area d’efflusso dei
condotti. Introducendo nella zona d’espansione conica dei fan anche un
cambio di geometria (fig. A1-6) da circolare a quadrato con angoli
ampiamente smussati, si ottiene una riduzione considerevole delle
dimensioni in altezza e larghezza dei condotti, aumentando di appena 7 hp
105

la potenza necessaria per ogni configurazione rispetto al grafico riportato
in figura A1-5.
L’area d’efflusso complessiva risulta espressa dalla seguente equazione
dove con θ si indica l’angolo dello smusso, mentre con r si indica il raggio
della circonferenza.
( )2 14 sin cos
2 2 4 / 2 coseffA r π ϑ π ϑ π ϑπ π
⎛ ⎞− −⎛ ⎞ ⎛ ⎞ ⎛ ⎞= +⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎝ ⎠ / 2
⋅
Fig. A1-6 – Geometria quadrata con angoli ampiamente smussati (45°).
Vantaggi e difficoltà progettuali delle soluzioni alternative
proposte
Le differenti geometrie aerodinamiche proposte per il progetto dei condotti
dei fan portano ad avere notevoli vantaggi aerodinamici, in particolare dal
punto di vista delle prestazioni. Tuttavia esse inducono nuove difficoltà
progettuali e complicazioni che hanno portato alla scelta di non utilizzarle
nel progetto preliminare attuale, bensì di lasciarle come possibile
alternativa o sviluppo futuro dello stesso.
106

Per queste analisi ci si riferirà all’ultima configurazione proposta, ovvero
quella avente un divergente dotato di una prima zona d’espansione e
cambio di geometria ed una seconda zona caratterizzata da un ugello
sezionato a 22.5°.
In prima analisi si può constatare come, con la nuova geometria proposta,
cambino gli assetti del velivolo in decollo verticale e volo a punto fisso oltre
che in volo avanzato. Poiché l’aria mentre attraversa il condotto, oltre ad
esser accelerata viene anche deviata e cambia la sua direzione, nelle prime
due configurazioni citate la sezione d’ingresso non avrà l’asse diretto
verticalmente, ma inclinato di 45° (fig. A1-7), al fine di ottenere un getto
verticale nella sezione d’efflusso. Questo non influisce in alcun modo sulle
prestazioni del velivolo, in quanto in tali configurazioni esso al più si
sposta con bassissime velocità e quindi risulta ininfluente l’orientamento
della sezione d’aspirazione.
Fig. A1-7 – Assetto del fan in volo a punto fisso o in decollo/atterraggio verticale.
In volo avanzato rettilineo orizzontale uniforme (fig. A1-8) l’area d’ingresso
risulta invece orientata nella direzione della corrente asintotica e, di
conseguenza, la trazione prodotta non è diretta orizzontalmente al velivolo
ma a 45° e quindi scomponibile in due contributi; il primo rappresenta
107

l’effettiva trazione orizzontale, mentre il secondo un contributo di portanza
da aggiungere a quello prodotto dalle ali. Poiché questo contributo di
portanza è sempre presente in volo avanzato, le dimensioni delle ali
possono essere ridotte diminuendo di conseguenza l’ingombro del velivolo.
Questo risulta essere sia un vantaggio aerodinamico, poiché è minore la
resistenza del velivolo, sia soprattutto un vantaggio in termini di peso, in
quanto si può eliminare un consistente tratto d’ala.
Fig. A1-8 – Assetto del fan in volo avanzato rettilineo orizzontale uniforme.
Durante la conversione, si può inoltre constatare come l’inclinazione
naturale dell’imbocco a 45°, derivante dalla configurazione in volo a punto
fisso, facilita le operazioni di transizione verso il volo avanzato, poiché nel
momento in cui si cominciano a ruotare i fan la sezione d’ingresso risulta
già posizionata favorevolmente alla corrente asintotica, facilitando
l’ingresso dell’aria all’interno del condotto.
Un altro grande vantaggio, frutto di questa configurazione, è che
riuscendo a contenere le dimensioni del diametro dei condotti si riducono
notevolmente anche i valori di resistenza aerodinamica delle gondole, le
quali, come si è potuto constatare nel capitolo 3, pesano notevolmente sul
complessivo valore di resistenza del velivolo; la nuova geometria del
condotto risulta essere sviluppata in lunghezza e non in larghezza,
riducendo l’area d’impatto del fan in volo avanzato. La diminuzione della
resistenza aerodinamica del velivolo permette di ottenere migliori
prestazioni aerodinamiche, oltre a ridurre il consumo di carburante, in
108

quanto è minore la trazione necessaria a vincere la resistenza
aerodinamica.
E’ quindi evidente come una soluzione di questo tipo presenta numerosi
vantaggi, tra cui spiccano la riduzione della resistenza aerodinamica
complessiva, una geometria più compatta, grazie alla diminuzione del
diametro dei fan e della lunghezza delle ali e, di conseguenza, un peso
inferiore.
Tuttavia tale soluzione presenta anche delle complicazioni progettuali. Si è
infatti fin qui ipotizzato di riuscire a deviare di 45° il flusso d’aria passante
all’interno del fan senza né perdite, né difficoltà. In realtà per effettuare ciò
è necessario progettare un complicato sistema di deviatori di flusso da
disporre lungo la sezione d’uscita dei condotti. Essi devono essere in grado
di deviare il flusso passante all’interno del condotto in ogni condizione di
assetto e spinta, senza incorrere in problemi di stallo; in caso contrario
l’area d’efflusso risulterebbe ridotta rispetto a quella effettiva ed il flusso in
uscita diretto con angoli diversi dai 45° di progetto. Questo causerebbe
valori di spinta inferiori a quelli teorici con ovvie ripercussioni sulle
prestazioni. E’ quindi necessario studiare la disposizione ed il numero
delle alette in modo che esse siano in grado di funzionare correttamente in
ogni assetto ed ad ogni valore di spinta.
Va anche ricordato che la presenza delle alette comporta di per sé la
nascita di un’ulteriore resistenza aerodinamica che può essere vista come
una diminuzione della trazione generata dai fan. Inoltre le alette per
deviare il flusso a 45° dovranno uscire per un breve tratto dal condotto,
tratto nel quale non avranno più alcun vincolo che le mantenga fisse al
bordo del condotto ed è quindi possibile che incorrano in oscillazioni che
in alcuni casi potrebbero portare anche alla rottura delle stesse.
Un altro motivo per cui le prestazioni reali potrebbero essere inferiori da
quelle teoriche è il particolare comportamento del flusso aerodinamico
109

nell’estremità superiore dell’ugello. E’ infatti possibile che il flusso si
stacchi dalla parete del condotto prima di giungere alla sezione d’uscita
(fig. A1-9) a causa dell’asimmetria dell’ultimo tratto dello stesso. Per
evitare questo fenomeno è necessario progettare un sistema di guide
interne al divergente in grado di mantenere uniforme la distribuzione di
flusso all’interno dello stesso e mantenere quindi il flusso d’aria attaccato
alla parete fino alla sezione d’uscita.
Fig. A1-9 – Distacco di vena nella zona superiore del tratto finale del divergente.
Ulteriore complicazione risulta essere la realizzazione della struttura del
fan. Infatti, in sede costruttiva, un condotto avente una zona di
transizione della sezione da circolare a quadrata, risulta essere
notevolmente più complesso da realizzare rispetto ad un condotto
semplicemente circolare. Inoltre anche la realizzazione di deflettori di
flusso posti nella sezione d’uscita risulta complicata, in quanto i deflettori
centrali risultano di lunghezza diversa rispetto ai deflettori posti nelle
estremità superiore ed inferiore del condotto.
Tutte queste complicazioni richiedono studi approfonditi e adeguate
sperimentazioni per essere risolte. Seguendo questa strada la “Moller
International” ha progettato e costruito la “M400 Skycar” (fig. A1-10), un
velivolo a decollo verticale dotato di quattro ventole intubate. La forma dei
condotti di quest’innovativo velivolo ricalca quella appena descritta in
questa appendice, naturalmente con notevoli sviluppi. In particolare la
Moller ha brevettato un ugello sezionato non a 22.5° bensì a 45°, il che gli
110

consente di aumentare decisamente il parametro d’espansione, σ, e
conseguentemente le prestazioni dei fan. Inoltre i quattro fan sono
caratterizzati ciascuno da un sistema di due ventole contro-rotanti in
grado di generare maggiore spinta ed i propulsori si trovano direttamente
all’interno del bulbo, così da annullare in pratica il peso delle trasmissioni
meccaniche. Inoltre la presenza di due ventole contro-rotanti elimina la
necessità di installare uno statore. I deviatori di flusso brevettati dalla
Moller sono inoltre in grado di ruotare a piacere al fine di direzionare il
flusso uscente sempre in maniera ottimale in ogni condizione di volo.
Il progetto della Moller risulta certamente innovativo e può essere
considerato come un notevole passo avanti per quanto riguarda i velivoli a
decollo verticale dotati di ventole intubate.
Fig. A1-10 – Moller M400 Skycar.
111

Appendice A2
Istruzioni per il calcolo della polare ala-fusoliera
Vengono qui di seguito riportate le istruzioni necessarie per il calcolo della
polare ala-fusoliera mediante il programma ESDU 96025b.
TEXT1 ITEM No.96025 TEXT2 Example 1 TEXT3 Con profilo 632-415 0.0065 1 0.1 4.0E6 20 -7 -6 -5 -4 -3 -2 -1 0 1 2 3 4 5 6 7 8 9 10 11 12 1 0 4.41 0.75 9.6 0.5 2 0.0 0.1501 0.05 0.30 18 0 0 0 0.0125 0.0334 -0.0154 0.0250 0.0444 -0.0225 0.0500 0.0598 -0.0304 0.0750 0.0690 -0.0361 0.1000 0.0764 -0.0409 0.1500 0.0852 -0.0484 0.2000 0.0892 -0.0541 0.2500 0.0908 -0.0578 0.3000 0.0905 -0.0596 0.4000 0.0859 -0.0592 0.5000 0.0774 -0.0550 0.6000 0.0661 -0.0481 0.7000 0.0525 -0.0391 0.8000 0.0373 -0.0283 0.9000 0.0204 -0.0159 0.9500 0.0112 -0.0090 1.0000 0.0000 0.0000 1.0 0.15 0.05 0.30
18 0 0 0 0.0125 0.0334 -0.0154 0.0250 0.0444 -0.0225 0.0500 0.0598 -0.0304 0.0750 0.0690 -0.0361 0.1000 0.0764 -0.0409 0.1500 0.0852 -0.0484 0.2000 0.0892 -0.0541 0.2500 0.0908 -0.0578 0.3000 0.0905 -0.0596 0.4000 0.0859 -0.0592 0.5000 0.0774 -0.0550 0.6000 0.0661 -0.0481 0.7000 0.0525 -0.0391
0.8000 0.0373 -0.0283 0.9000 0.0204 -0.0159 0.9500 0.0112 -0.0090 1.0000 0.0000 0.0000 2 0. 0 1 0 0.0143 0.224 0.897 1.226 .25 3 0.16 1.0
112

Bibliografia
II.. Barnes W. McCormick Jr, “Aerodynamics of V/STOL Flight”,
Academic Press, New York 1967
IIII.. F. Marc de Piolenc & George E. Wright Jr, “Ducted Fan Design
Volume 1”, Millenial year, California November 2001
IIIIII.. Wallis R. A. “Axial Flow Fans & Ducts”, Wiley, London 1993
IIVV.. Bruno Eck, “FANS”, Oxford 1973
VV.. Martin Hollamann, “Modern Propellers and Duct Design”, Aircraft
design, California 1993
VVII.. Raspet paper number 60-AV-11, “The ducted propeller for STOL
airplanes”, Mississipi University 1960
VVIIII.. A. D. S. Carter, “The low speed performance of related airfoils in
cascades”, Great Britain Aero Research Council, ARC CP 29, 1950
VVIIIIII.. A. D. S. Carter, “The calculation of optimum incidence for
aerofoils”, Great Britain Aero Research Council, ARC CP 646, 1961
113


















