
Profesor aparicio sobre contornos
16
UNIVERSIDAD DE PANAMÁ FACULTAD DE CIENCIAS NATURALES, EXACTAS Y TECNOLOGÍA DEPARTAMENTO DE MATEMÁTICA Por: [email protected]
-
Upload
edisflores -
Category
Documents
-
view
144 -
download
1
Transcript of Profesor aparicio sobre contornos
UNIVERSIDAD DE PANAMÁ
FACULTAD DE CIENCIAS NATURALES, EXACTAS Y TECNOLOGÍA
DEPARTAMENTO DE MATEMÁTICA
Por:

INTRODUCCIÓN
Un modelo matemático, es una traducción de la realidad de un sistema
natural, en términos matemático.
Una vez planteado el problema natural mediante un modelo matemático,
podemos aplicar el álgebra, el cálculo y otras herramientas
matemáticas para resolver el problema y posteriormente analizar el
comportamiento del sistema que se estudia. Esto lo plantearemos en el
siguiente diagrama:
Fenómeno natural
Modelo matemático
Solución del modelo
Predicciones
cualitativas y
cuantitativas del
sistema
Análisis del
comportamiento del
sistema

Un procedimiento adecuado en la resolución de un problema natural
debe estar sustentado en el entendimiento y modelado del
problema.
Luego resulta indispensable la correcta formulación del problema
natural y las condiciones complementarias que señalaremos
posteriormente.
En este trabajo pretendemos establecer las condiciones necesarias para
que un problema natural esté planteado correctamente.
Un problema de contorno está estructurado por el modelo
matemático que rige el fenómeno natural, las condiciones iniciales y las
condiciones de frontera o de borde.

Problema de contorno
Modelo matemático
Condiciones
iniciales
Condiciones
de frontera
Partiremos del supuesto de que «todo fenómeno no autónomo, debe
caracterizarse mediante funciones que dependan en forma
continua de los valores iniciales.»
De lo contrario, el fenómeno no se puede considerar bien determinado por
las condiciones iniciales.

Si la solución de un problema matemático cumple con el supuesto
anterior, entonces diremos que «el problema es estable.»
Diremos que un problema matemático está correctamente planteado si:
Existe la solución del problema.
La solución del problema es única.
La solución del problema es estable.
Si el modelo matemático son sistemas de ecuaciones diferenciales
ordinarias, entonces la existencia y unicidad quedan resueltas
satisfactoriamente mediante el uso del Teorema de Picard – Lindelöf.
Primero nos plantearemos el Problema de Cauchy (PC), que establece
lo siguiente: Dado el problema de valor inicial
𝑑𝑦
𝑑𝑥= 𝑓(𝑥, 𝑦)
𝑦 𝑥0 = 𝑦0
PC 𝑥0, 𝑦0 ∈ 𝒟𝑓

Una función diferenciable 𝜙 ∃ → (PC) si:
𝑑𝑦
𝑑𝑥= 𝑓 𝑥, 𝜙 𝑥 .
𝜙 𝑥0 = 𝑦0.
Teorema: Sea 𝑓: → ℝ𝑛, ⊆ ℝ × ℝ𝑛
i) 𝑓 continua.
ii) 𝑓 localmente Lipschitziana respecto a 𝑥. Entonces, dado
𝑥0, 𝑦0 ∈ podemos encontrar un cerrado
𝐼𝛼 = 𝑥0 − 𝛼, 𝑥0 + 𝛼 ⊂ ℝ donde existe solución única de (PC)
Este teorema garantiza la existencia y unicidad local de la solución de una
ecuación diferencial ordinaria dentro del intervalo 𝐼𝛼 .
Es importante señalar que la condición (i) de continuidad de 𝑓 únicamente
asegura la existencia de soluciones.

Para garantizar la unicidad de las soluciones, es necesaria la condición de
que 𝑓 sea Lipschitziana.
Es importante señalar que para las ecuaciones diferenciales parciales, el
problema de existencia y unicidad no ha sido resuelto completamente,
aunque el Teorema de Cauchy – Kovalevskaya establece que una ecuación
diferencial parcial (EDP) analítica en la función incógnita y sus derivadas,
tiene una solución analítica única.
Más adelante, presentaremos ejemplos de EDP cuya solución existe y es
única pero su comportamiento o propiedades son inaceptables, es decir,
que el problema es inestable.
La solución 𝑢(𝑥, 𝑡) de una EDP es estable si:
∃ 𝛿 휀, 𝑡0 > 0: 𝑢1 𝑥, 𝑡 − 𝑢2 𝑥, 𝑡 < 휀
siempre que:
𝑖) 𝜑1 𝑥 − 𝜑2(𝑥) < 𝛿
𝑖𝑖) Ψ1 𝑥 − Ψ2 < 𝛿 ∀ 𝑡 ∈ [0, 𝑡0]
∀ 휀 > 0

Esto quiere decir que para cualquier intervalo de tiempo [0, 𝑡0] y
cualquier grado de exactitud , existe un 𝛿(휀, 𝑡0) tal que dos soluciones
cualesquiera de una EDP 𝑢1(𝑥, 𝑡) y 𝑢2(𝑥, 𝑡) se diferenciarán durante el
intervalo de tiempo en menos que , siempre que los valores iniciales
𝑢1 𝑥, 0 = 𝜑1(𝑥)
𝜕𝑢1
𝜕𝑡 𝑡=0
= Ψ1(𝑥)
𝑢2 𝑥, 0 = 𝜑2(𝑥)
𝜕𝑢2
𝜕𝑡 𝑡=0
= Ψ2(𝑥)
se diferencian en menos que .
Con el propósito de dilucidar cuándo un problema está o no
correctamente planteado, veremos ejemplos de casos muy conocidos.
(Pc)

Ejemplo 01: Demuestre que el problema de contorno dado está
correctamente planteado.
Solución:
La solución del problema de contorno viene dada por la fórmula de
D’Alambert
𝑢 𝑥, 𝑡 =1
2𝜑 𝑥 + 𝑐𝑡 + 𝜑(𝑥 − 𝑐𝑡) +
1
2𝑐 Ψ 𝜉 𝑑𝜉
𝑥+𝑐𝑡
𝑥−𝑐𝑡
𝜕2𝑢
𝜕𝑡2 − 𝑐2𝜕2𝑢
𝜕𝑡2 = 0; 𝑢 𝑥, 0 = 𝜑(𝑥); 𝜕𝑢
𝜕𝑡 𝑡=0
= Ψ(𝑥) (Pc)
Mediante las transformaciones 𝑣 = 𝑥 + 𝑐𝑡, 𝑧 = 𝑥 − 𝑐𝑡 la función 𝑢 se
transforma en una función de 𝑣 y 𝑧, es decir, 𝑢 𝑥, 𝑡 = 𝑢 𝑣, 𝑧 . Luego
aplicando la regla de la cadena se tiene que

𝜕𝑢
𝜕𝑥=
𝜕𝑢
𝜕𝑣∙𝜕𝑣
𝜕𝑥+
𝜕𝑢
𝜕𝑧∙𝜕𝑧
𝜕𝑥=
𝜕𝑢
𝜕𝑣+
𝜕𝑢
𝜕𝑧
𝜕2𝑢
𝜕𝑥2 =𝜕
𝜕𝑣
𝜕𝑢
𝜕𝑣+
𝜕𝑢
𝜕𝑧
𝜕𝑣
𝜕𝑥+
𝜕
𝜕𝑧
𝜕𝑢
𝜕𝑣+
𝜕𝑢
𝜕𝑧
𝜕𝑧
𝜕𝑥
𝜕2𝑢
𝜕𝑥2 =𝜕2𝑢
𝜕𝑣2 + 2𝜕2𝑢
𝜕𝑣𝜕𝑧+
𝜕2𝑢
𝜕𝑧2 (1)
De igual manera
𝜕𝑢
𝜕𝑡=
𝜕𝑢
𝜕𝑣∙𝜕𝑣
𝜕𝑡+
𝜕𝑢
𝜕𝑧∙𝜕𝑧
𝜕𝑡
𝜕𝑢
𝜕𝑡= 𝑐
𝜕𝑢
𝜕𝑣−
𝜕𝑢
𝜕𝑧
𝜕2𝑢
𝜕𝑡2 = 𝑐𝜕
𝜕𝑣
𝜕𝑢
𝜕𝑣−
𝜕𝑢
𝜕𝑧
𝜕𝑣
𝜕𝑡+
𝜕
𝜕𝑧
𝜕𝑢
𝜕𝑣−
𝜕𝑢
𝜕𝑧
𝜕𝑧
𝜕𝑡

𝜕2𝑢
𝜕𝑥2= 𝑐2
𝜕2𝑢
𝜕𝑣2− 2
𝜕2𝑢
𝜕𝑣𝜕𝑧+
𝜕2𝑢
𝜕𝑧2 (2)
Sustituyendo (1) y (2) en la EDP de (Pc), se tiene:
𝜕2𝑢
𝜕𝑣𝜕𝑧= 0
Integrando parcialmente respecto a 𝑧 se tiene
𝜕𝑢
𝜕𝑣= ℎ(𝑣) de donde
𝑢 𝑣, 𝑧 = ℎ 𝑣 𝜕𝑣 + 𝑓2(𝑧)= 𝑓1 𝑣 + 𝑓2 𝑧
𝑢 𝑥, 𝑡 = 𝑓1 𝑥 + 𝑐𝑡 + 𝑓2(𝑥 − 𝑐𝑡)
𝑢 𝑥, 𝑡 = 𝑓1 𝑥 + 𝑐𝑡 + 𝑓2(𝑥 − 𝑐𝑡) (3)
Por consiguiente

de donde
Determinemos las funciones 𝑓1 y 𝑓2 tales que se cumplan las condiciones
iniciales:
𝑢 𝑥, 𝑡 = 𝑓1 𝑥 + 𝑓2 𝑥 = 𝜑 𝑥 (𝟒𝒂)
𝜕𝑢
𝜕𝑡 𝑡=0
= 𝑐 𝑓1′ 𝑥 − 𝑐 𝑓2
′ 𝑥 = Ψ 𝑥 (𝟒𝒃)
Integrando (4b) se tiene
𝑓1 𝑥 − 𝑓2 𝑥 =1
𝑐 Ψ 𝜉 𝑑𝜉 + 𝐾
𝑥
𝑥0
Luego obtenemos el sistema
𝑓1 𝑥 + 𝑓2 𝑥 = 𝜑(𝑥)
𝑓1 𝑥 − 𝑓2 𝑥 =1
2𝑐 Ψ 𝜉 𝑑𝜉 + 𝐾
𝑥
𝑥0
𝑓1 𝑥 =1
2𝜑 𝑥 +
1
2𝑐 Ψ 𝜉 𝑑𝜉 +
𝐾
2
𝑥
𝑥0
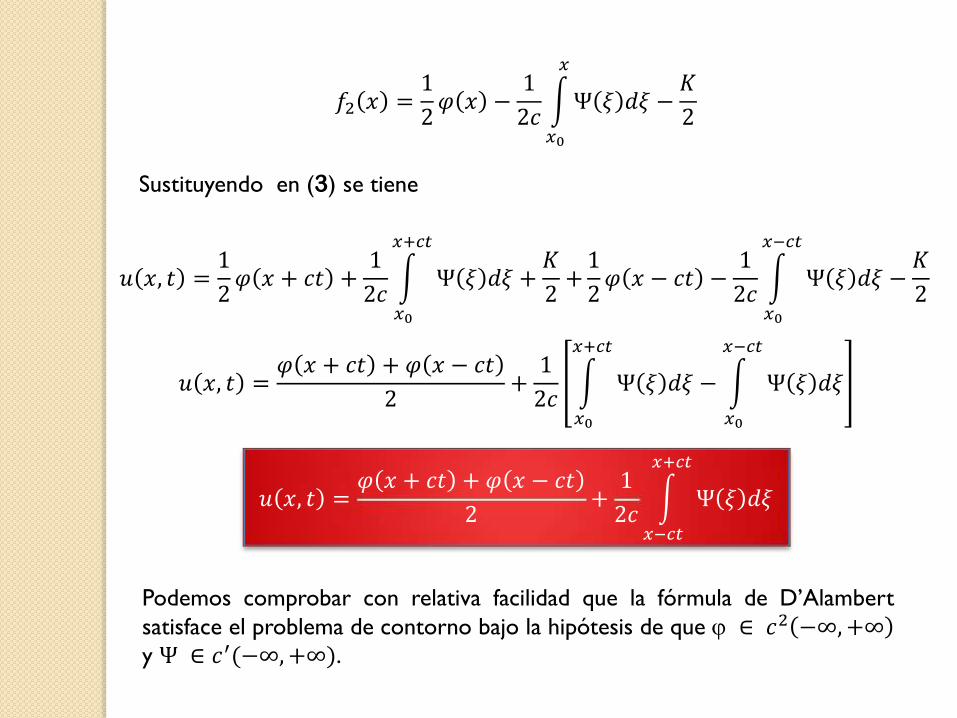
Podemos comprobar con relativa facilidad que la fórmula de D’Alambert
satisface el problema de contorno bajo la hipótesis de que ∈ 𝑐2 −∞, +∞
y Ψ ∈ 𝑐′(−∞, +∞).
𝑓2 𝑥 =1
2𝜑 𝑥 −
1
2𝑐 Ψ 𝜉 𝑑𝜉 −
𝐾
2
𝑥
𝑥0
Sustituyendo en (3) se tiene
𝑢 𝑥, 𝑡 =1
2𝜑 𝑥 + 𝑐𝑡 +
1
2𝑐 Ψ 𝜉 𝑑𝜉 +
𝐾
2+
𝑥+𝑐𝑡
𝑥0
1
2𝜑 𝑥 − 𝑐𝑡 −
1
2𝑐 Ψ 𝜉 𝑑𝜉 −
𝐾
2
𝑥−𝑐𝑡
𝑥0
𝑢 𝑥, 𝑡 =𝜑 𝑥 + 𝑐𝑡 + 𝜑 𝑥 − 𝑐𝑡
2+
1
2𝑐 Ψ 𝜉 𝑑𝜉
𝑥+𝑐𝑡
𝑥0
− Ψ 𝜉 𝑑𝜉
𝑥−𝑐𝑡
𝑥0
𝑢 𝑥, 𝑡 =𝜑 𝑥 + 𝑐𝑡 + 𝜑 𝑥 − 𝑐𝑡
2+
1
2𝑐 Ψ 𝜉 𝑑𝜉
𝑥+𝑐𝑡
𝑥−𝑐𝑡

Podemos demostrar la unicidad de la solución, teniendo presente que si
existiera una segunda solución del problema ésta sería exactamente la
fórmula de D’Alambert.
Analicemos ahora la estabilidad de la solución, es decir, investiguemos si
la solución varía en forma continua conforme las condiciones iniciales
varían en forma continua. En efecto, sean 𝑢1(𝑥, 𝑡) y 𝑢2(𝑥, 𝑡)tales que
Entonces
𝑢1 𝑥, 𝑡 − 𝑢2(𝑥, 𝑡) ≤1
2φ1 𝑥 + 𝑐𝑡 − φ2 𝑥 + 𝑐𝑡 +
+1
2φ1 𝑥 − 𝑐𝑡 − φ2 𝑥 − 𝑐𝑡 +
1
2𝑐 Ψ1 𝜉 − Ψ2 𝜉 𝑑𝜉
𝑥+𝑐𝑡
𝑥−𝑐𝑡
de donde se obtiene que
𝑢1 𝑥, 𝑡 − 𝑢2(𝑥, 𝑡) ≤𝛿
2+
𝛿
2+
1
2𝑐(2δ𝑐𝑡0)
≤ 𝛿 + 𝛿𝑡0
≤ 𝛿(1 + 𝑡0)
𝑢1 𝑥, 𝑡 ∃ (𝑃𝑐) 𝑢2 𝑥, 𝑡 ∃ (𝑃𝑐)

Luego
𝑢1 𝑥, 𝑡 − 𝑢2(𝑥, 𝑡) ≤ 휀 siempre que 𝛿 =휀
1 + 𝑡0
En consecuencia, el problema de contorno (Pc) está planteado
correctamente.
Ejemplo 02: Demuestre que el problema de contorno dado está formulado
incorrectamente.
𝜕2𝑢
𝜕𝑥2 +𝜕2𝑢
𝜕𝑦2 = 0; 𝑢1 𝑥, 0 = 𝜑1 𝑥 = 0;
𝜕𝑢1
𝜕𝑦 𝑦=0
= Ψ1 = 0;
Solución:
𝑢2 𝑥, 0 = 𝜑2 𝑥 =sin 𝑛𝑥
𝑛; 𝑛 ∈ ℤ
𝜕𝑢2
𝜕𝑦 𝑦=0
= Ψ2 = 0; (Pc)
Podemos demostrar que:
𝑢1 𝑥, 𝑡 ≡ 0 ∃ (𝑃𝑐); 𝑢2 𝑥, 𝑡 =sin 𝑛𝑥 ∙ (𝑐ℎ𝑛𝑦)
𝑛 ∃ (𝑃𝑐)

𝑢1 𝑥, 𝑡 − 𝑢2(𝑥, 𝑡) = 0 −sin 𝑛𝑥 ∙ (𝑐ℎ𝑛𝑦)
𝑛
0 −sin 𝑛𝑥 ∙ (𝑐ℎ𝑛𝑦)
𝑛 𝑛→∞∞ 𝑦 fijo
mientras que
Ψ1 − Ψ2 = 0 −sin 𝑛𝑥
𝑛 𝑛→∞0
Luego la situación no varía en forma continua conforme a las
condiciones iniciales. En consecuencia, el problema de contorno está
mal propuesto.
Estos problemas mal definidos, no son en general satisfactorios para
aplicaciones física.
Muchas gracias…


















