Problem Solving as State Space Search · Problem Solving as State Space Search • Formulate Goal...
34
1 Brian Williams, Spring 03 1 Problem Solving as State Space Search Brian C. Williams 16.410-13 Sep 15 th , 2003 Slides adapted from: 6.034 Tomas Lozano Perez, Russell and Norvig AIMA Brian Williams, Spring 03 2 Complex missions must carefully: • Plan complex sequences of actions • Schedule tight resources • Monitor and diagnose behavior • Repair or reconfigure hardware. Most AI problems, like these, may be formulated as state space search. Courtesy of NASA/JPL-Caltech. http://www.jpl.nasa.gov.
Transcript of Problem Solving as State Space Search · Problem Solving as State Space Search • Formulate Goal...
1
Brian Williams, Spring 03 1
Problem Solving as State Space Search
Brian C. Williams
16.410-13
Sep 15th, 2003Slides adapted from:6.034 Tomas Lozano Perez,Russell and Norvig AIMA
Brian Williams, Spring 03 2
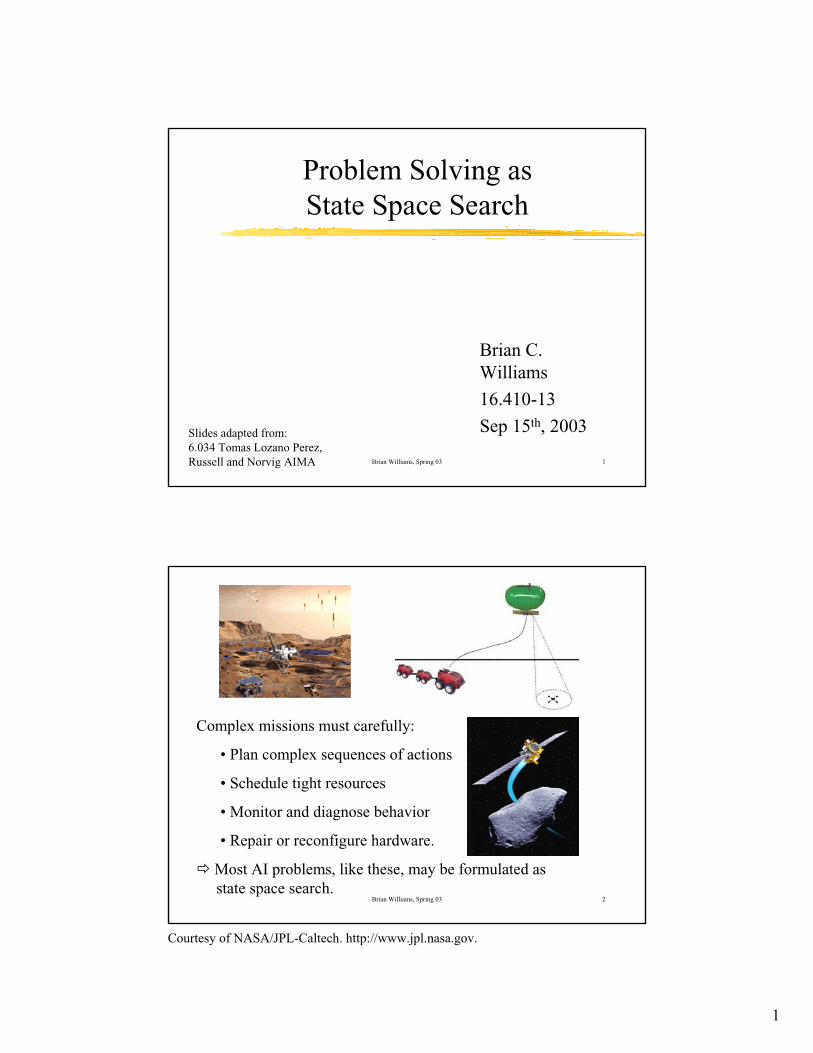
Complex missions must carefully:
• Plan complex sequences of actions
• Schedule tight resources
• Monitor and diagnose behavior
• Repair or reconfigure hardware.
Most AI problems, like these, may be formulated as state space search.
Courtesy of NASA/JPL-Caltech. http://www.jpl.nasa.gov.
2
Brian Williams, Spring 03 3
Assignments
• Remember: Problem set #1: Rules and Scheme due todaySeptember 15th, 2003.
• Reading: – Solving problems by searching: AIMA Ch. 3
• Homework for this lecture:– Problem set #2 due Monday, Sept. 22
Brian Williams, Spring 03 4
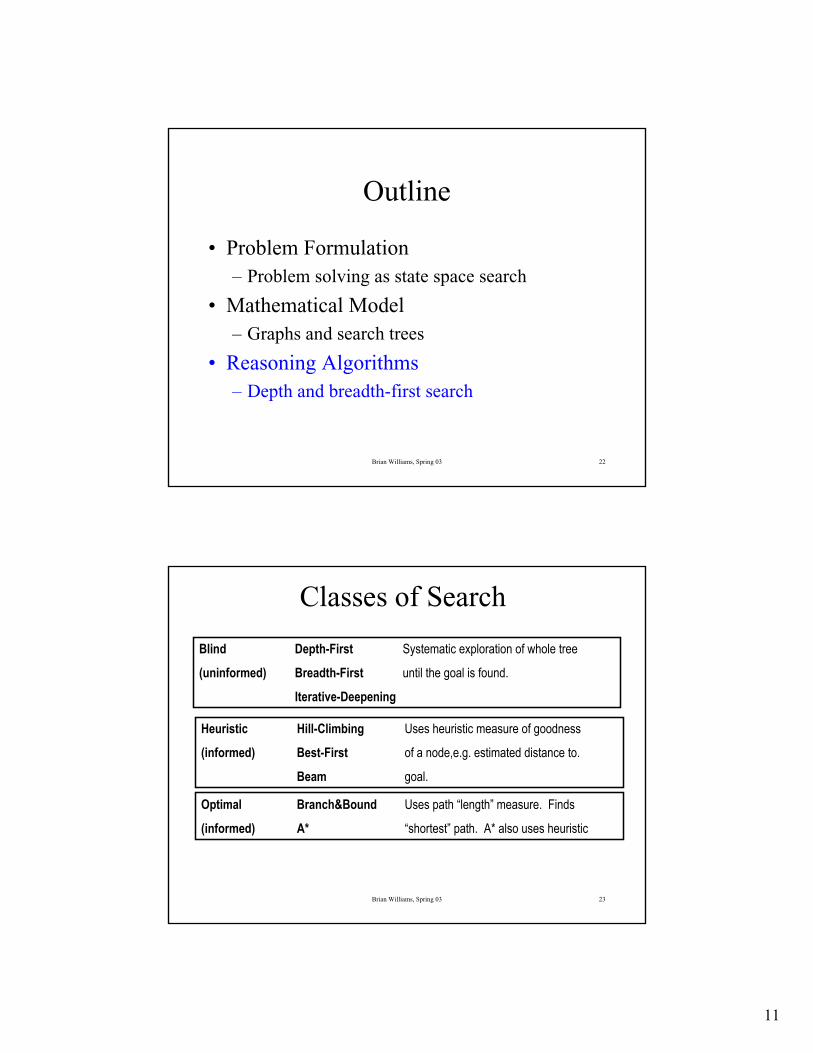
Outline
• Problem Formulation– Problem solving as state space search
• Mathematical Model– Graphs and search trees
• Reasoning Algorithms– Depth and breadth-first search
3
Brian Williams, Spring 03 5
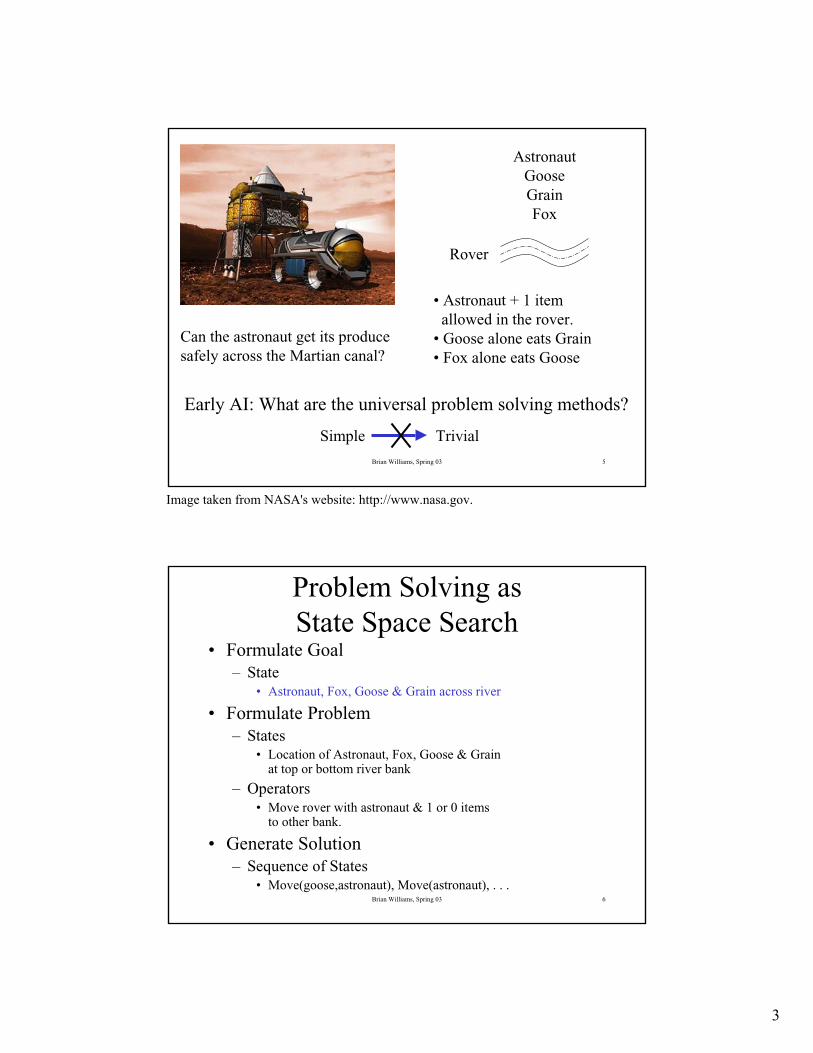
Early AI: What are the universal problem solving methods?
AstronautGooseGrainFox
Rover
Can the astronaut get its produce safely across the Martian canal?
• Astronaut + 1 item allowed in the rover.
• Goose alone eats Grain• Fox alone eats Goose
Simple Trivial
Brian Williams, Spring 03 6
Problem Solving as State Space Search
• Formulate Goal– State
• Astronaut, Fox, Goose & Grain across river
• Formulate Problem– States
• Location of Astronaut, Fox, Goose & Grain at top or bottom river bank
– Operators• Move rover with astronaut & 1 or 0 items
to other bank.
• Generate Solution– Sequence of States
• Move(goose,astronaut), Move(astronaut), . . .
Image taken from NASA's website: http://www.nasa.gov.
4
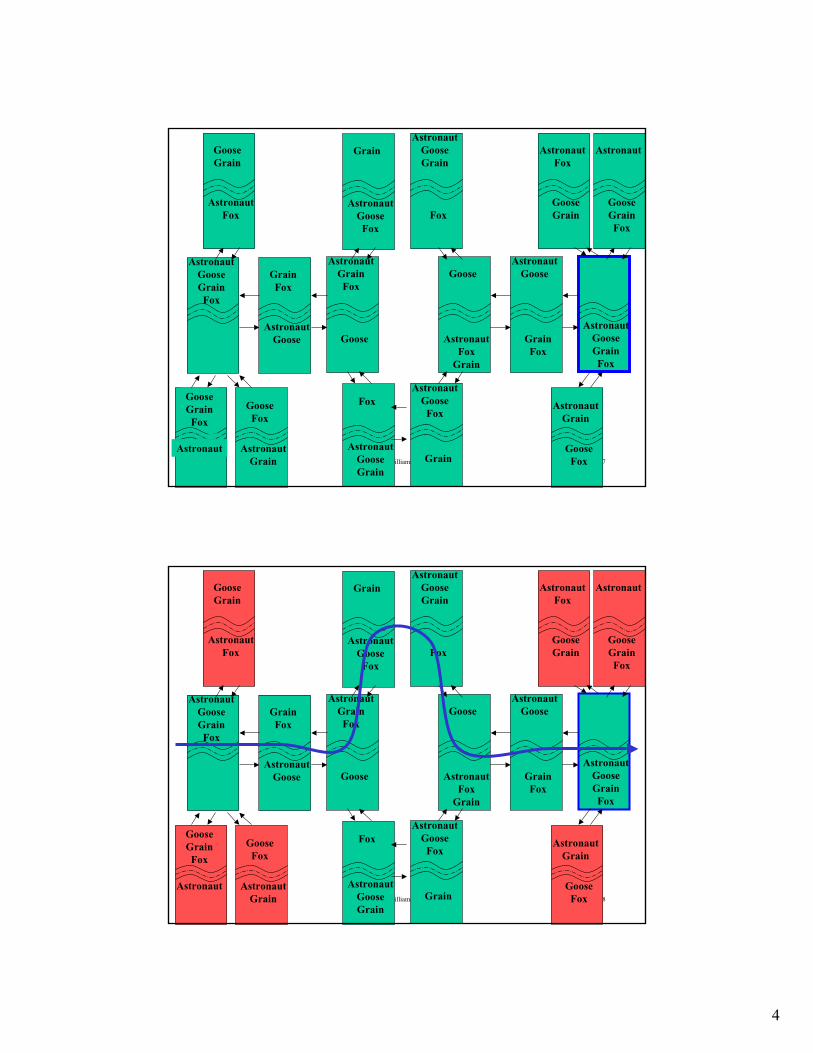
Brian Williams, Spring 03 7
AstronautGooseGrainFox
GrainFox
AstronautGoose
AstronautGrainFox
Goose
Goose
AstronautFox
Grain
AstronautGoose
GrainFox
AstronautGooseGrainFox
Grain
AstronautGooseFox
AstronautGooseGrain
Fox
Fox
AstronautGooseGrain
AstronautGoose
Fox
Grain
GooseFox
AstronautGrain
GooseGrain
AstronautFox
AstronautGrain
GooseFox
AstronautFox
GooseGrain
GooseGrainFox
Astronaut
Astronaut
GooseGrainFox
Brian Williams, Spring 03 8
AstronautGooseGrainFox
GrainFox
AstronautGoose
AstronautGrainFox
Goose
Goose
AstronautFox
Grain
AstronautGoose
GrainFox
AstronautGooseGrainFox
Grain
AstronautGooseFox
AstronautGooseGrain
Fox
Fox
AstronautGooseGrain
AstronautGoose
Fox
Grain
GooseFox
AstronautGrain
GooseGrain
AstronautFox
AstronautGrain
GooseFox
AstronautFox
GooseGrain
GooseGrainFox
Astronaut
Astronaut
GooseGrainFox
5
Brian Williams, Spring 03 9
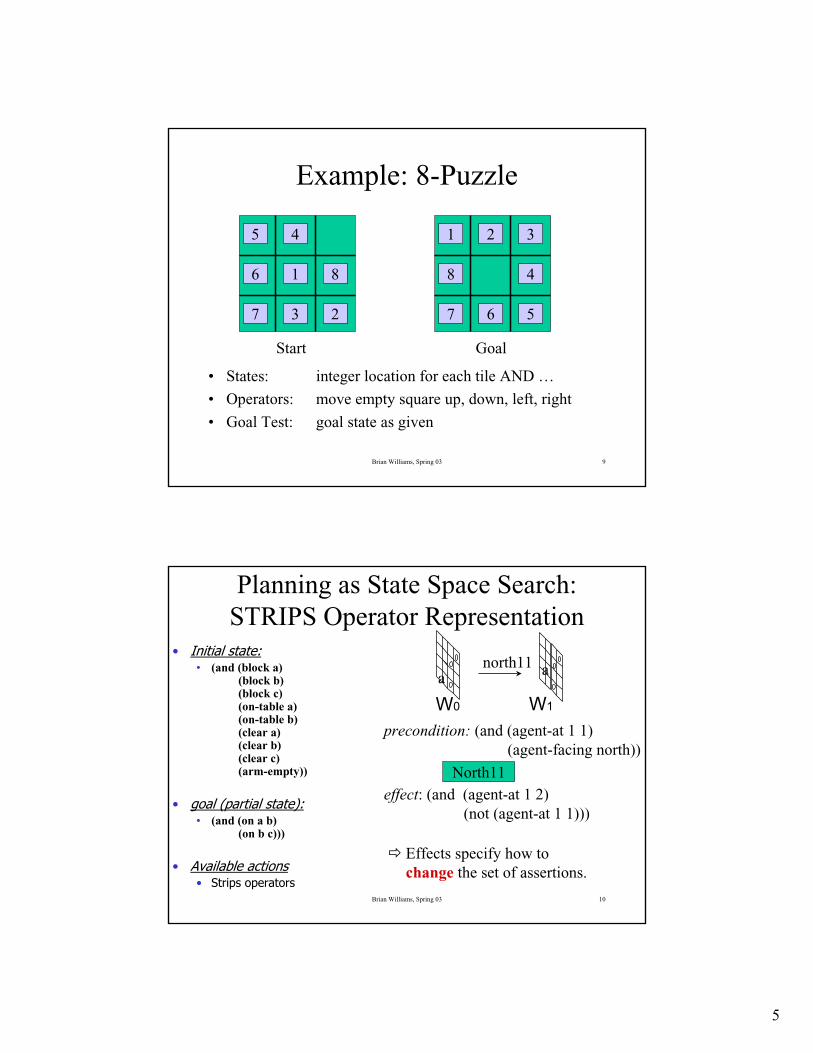
Example: 8-Puzzle
• States:
• Operators:
• Goal Test:
5 4
6 1
7 3
8
2
1 2
8
3
7 6
4
5
Start Goal
integer location for each tile AND …
move empty square up, down, left, right
goal state as given
Brian Williams, Spring 03 10
Planning as State Space Search:STRIPS Operator Representation
Effects specify how to change the set of assertions.
a anorth11
W0 W1
• Initial state:• (and (block a)
(block b)(block c) (on-table a) (on-table b) (clear a) (clear b) (clear c) (arm-empty))
• goal (partial state):• (and (on a b)
(on b c)))
• Available actions• Strips operators
precondition: (and (agent-at 1 1)(agent-facing north))
effect: (and (agent-at 1 2)(not (agent-at 1 1)))
North11
6
Brian Williams, Spring 03 11
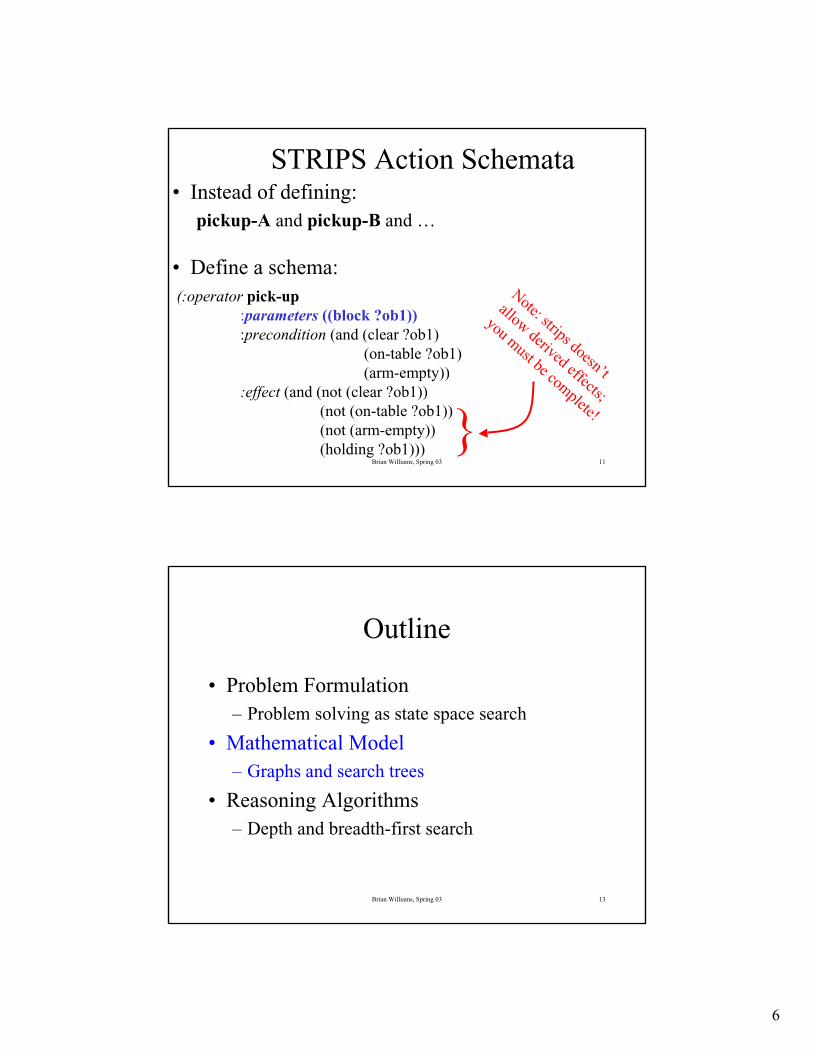
STRIPS Action Schemata
(:operator pick-up:parameters ((block ?ob1)):precondition (and (clear ?ob1)
(on-table ?ob1) (arm-empty))
:effect (and (not (clear ?ob1))(not (on-table ?ob1))(not (arm-empty))(holding ?ob1)))
• Instead of defining: pickup-A and pickup-B and …
• Define a schema:Note: strips doesn’t
allowderived effects;
you must be complete!}
Brian Williams, Spring 03 13
Outline
• Problem Formulation– Problem solving as state space search
• Mathematical Model– Graphs and search trees
• Reasoning Algorithms– Depth and breadth-first search
7
Brian Williams, Spring 03 14
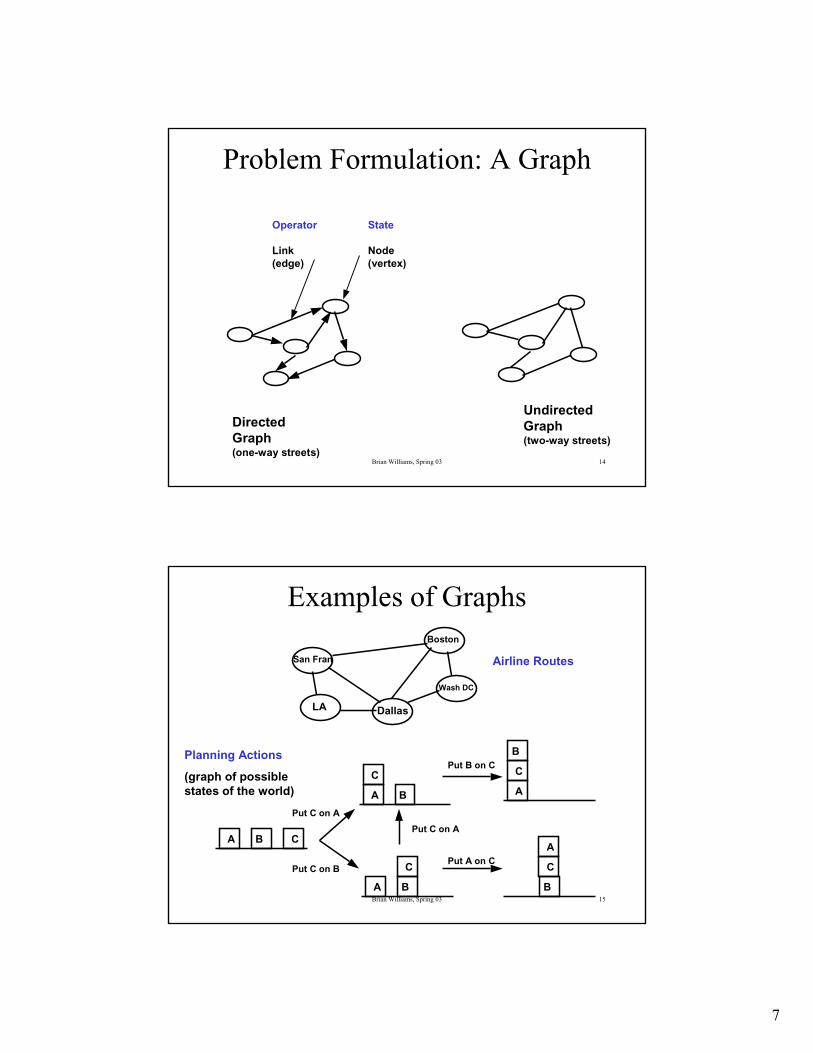
Problem Formulation: A Graph
Operator
Link(edge)
State
Node(vertex)
DirectedGraph(one-way streets)
UndirectedGraph(two-way streets)
Brian Williams, Spring 03 15
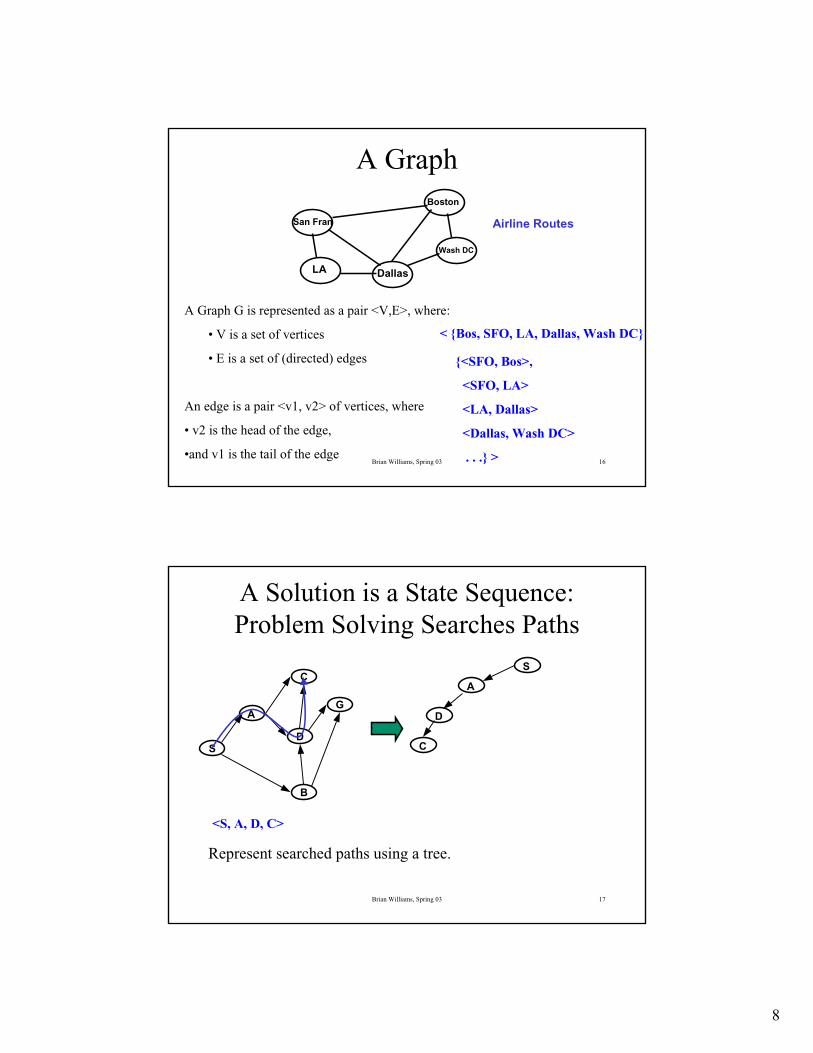
Examples of Graphs
San Fran
Boston
LA Dallas
Wash DC
Airline Routes
A B C
A B
C
A B
C
A
B
C
Put C on B
Put C on A
Put B on C
Put C on A
A
B
CPut A on C
Planning Actions
(graph of possible states of the world)
8
Brian Williams, Spring 03 16
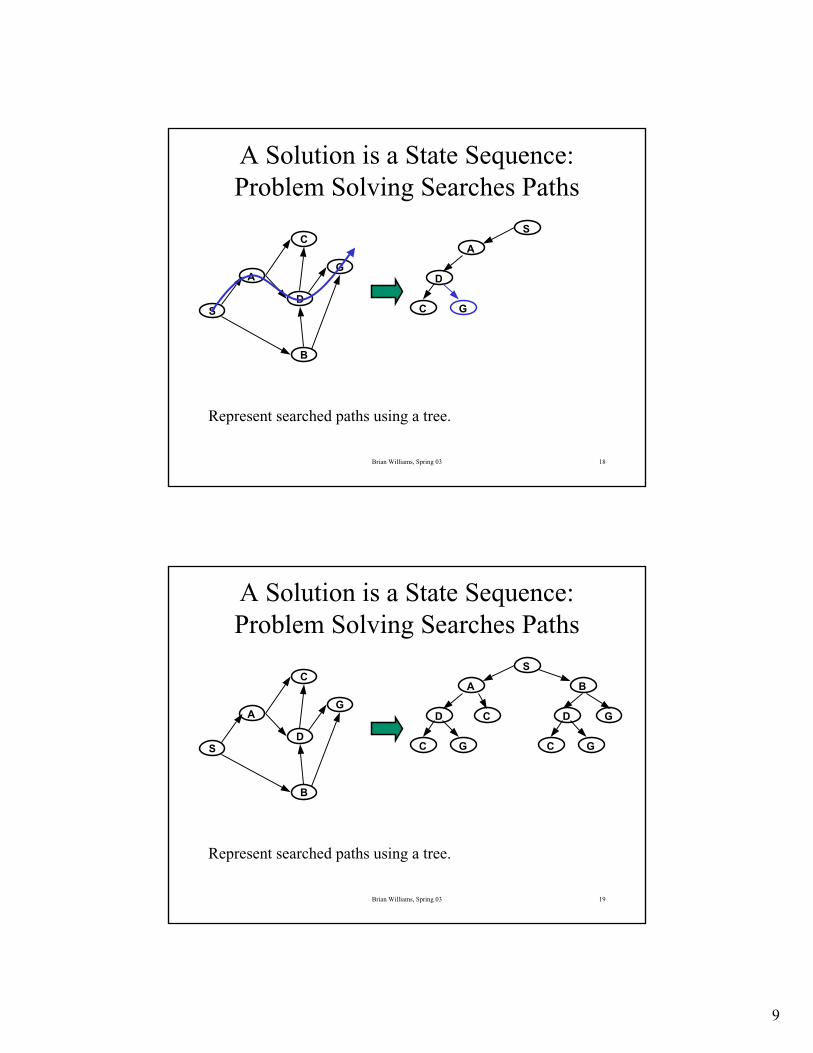
A Graph
San Fran
Boston
LA Dallas
Wash DC
Airline Routes
A Graph G is represented as a pair <V,E>, where:
• V is a set of vertices
• E is a set of (directed) edges
An edge is a pair <v1, v2> of vertices, where
• v2 is the head of the edge,
•and v1 is the tail of the edge
< {Bos, SFO, LA, Dallas, Wash DC}
{<SFO, Bos>,
<SFO, LA>
<LA, Dallas>
<Dallas, Wash DC>
. . .} >
Brian Williams, Spring 03 17
A Solution is a State Sequence:Problem Solving Searches Paths
C
S
B
GA
D
S
D
A
C
Represent searched paths using a tree.
<S, A, D, C>
9
Brian Williams, Spring 03 18
A Solution is a State Sequence:Problem Solving Searches Paths
C
S
B
GA
D
S
D
A
C G
Represent searched paths using a tree.
Brian Williams, Spring 03 19
A Solution is a State Sequence:Problem Solving Searches Paths
C
S
B
GA
D
S
D
BA
C G
C G
D
C G
Represent searched paths using a tree.
10
Brian Williams, Spring 03 20
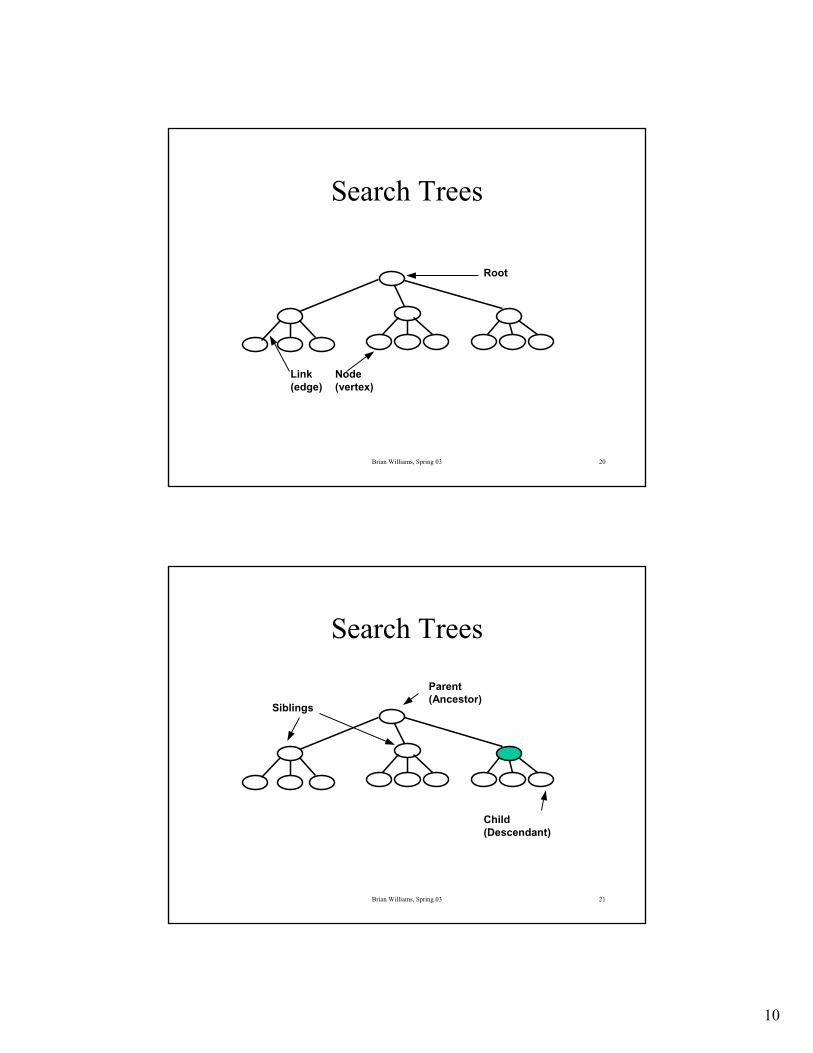
Search Trees
Root
Link(edge)
Node(vertex)
Brian Williams, Spring 03 21
Search Trees
Parent(Ancestor)
Child(Descendant)
Siblings
11
Brian Williams, Spring 03 22
Outline
• Problem Formulation– Problem solving as state space search
• Mathematical Model– Graphs and search trees
• Reasoning Algorithms– Depth and breadth-first search
Brian Williams, Spring 03 23
Classes of Search
Blind Depth-First Systematic exploration of whole tree
(uninformed) Breadth-First until the goal is found.
Iterative-Deepening
Heuristic Hill-Climbing Uses heuristic measure of goodness
(informed) Best-First of a node,e.g. estimated distance to.
Beam goal.
Optimal Branch&Bound Uses path “length” measure. Finds
(informed) A* “shortest” path. A* also uses heuristic
12
Brian Williams, Spring 03 24
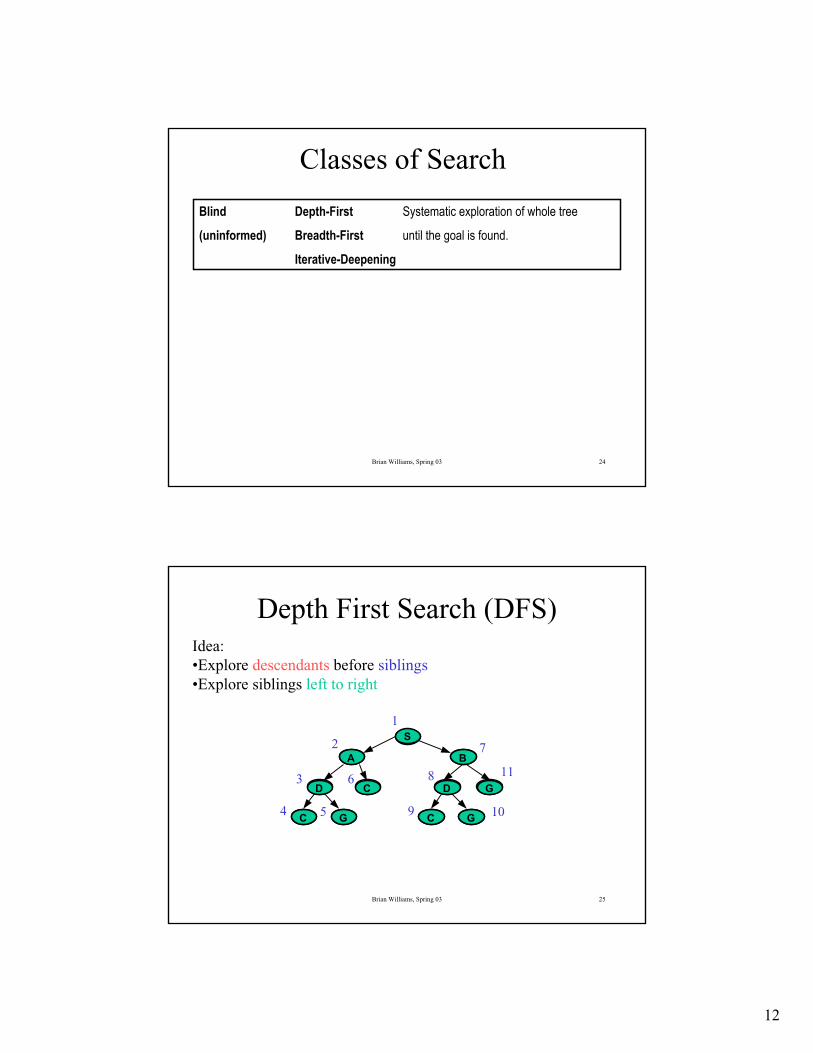
Classes of Search
Blind Depth-First Systematic exploration of whole tree
(uninformed) Breadth-First until the goal is found.
Iterative-Deepening
Brian Williams, Spring 03 25
Depth First Search (DFS)
S
D
BA
C G
C G
D
C G
Idea: •Explore descendants before siblings•Explore siblings left to right
1
2
3
4 5
6
7
8
9 10
11
S
A
D
C G
C
B
D
C G
G
13
Brian Williams, Spring 03 26
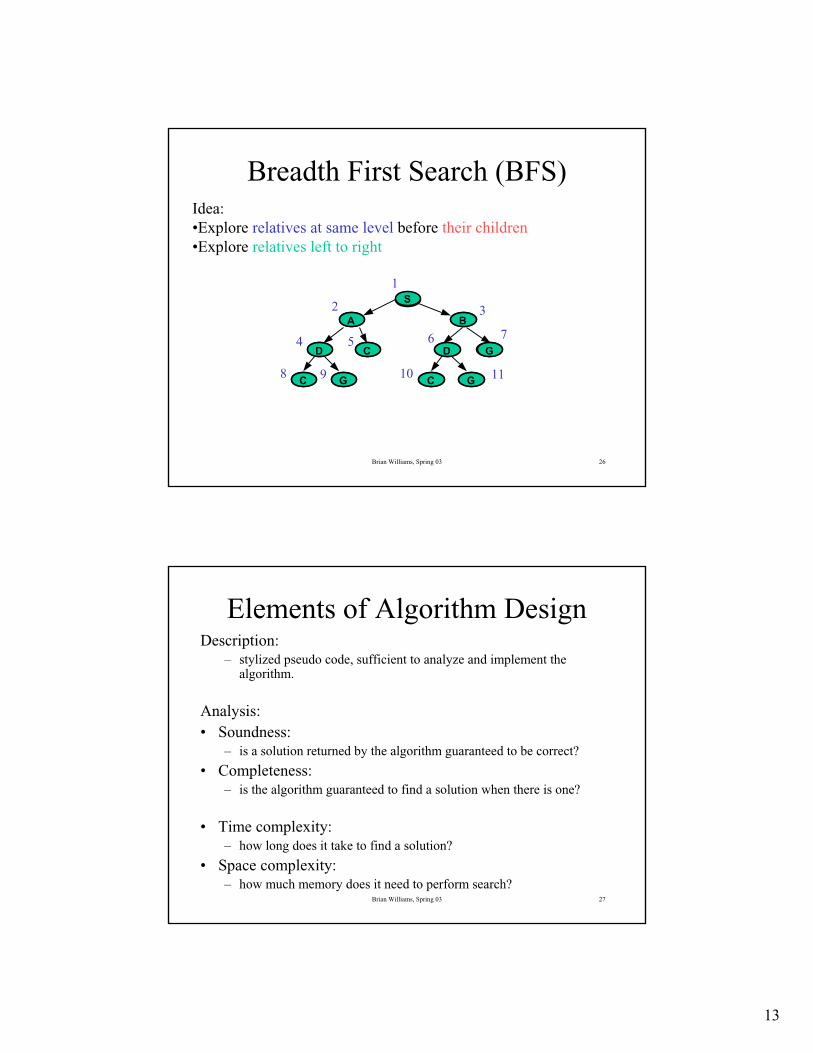
Breadth First Search (BFS)
S
D
BA
C G
C G
D
C G
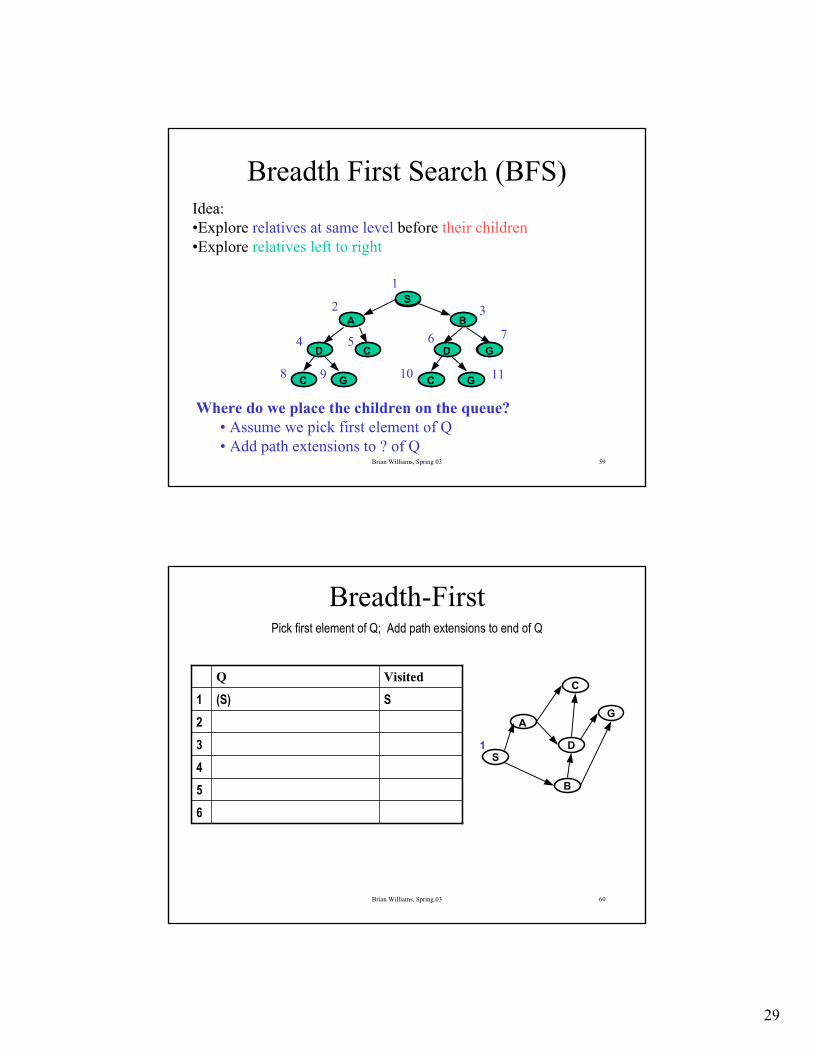
Idea: •Explore relatives at same level before their children•Explore relatives left to right
1
2
4
8 9
5
3
6
10 11
7
S
A
D
C G
C
B
D
C G
G
Brian Williams, Spring 03 27
Elements of Algorithm DesignDescription:
– stylized pseudo code, sufficient to analyze and implement the algorithm.
Analysis:• Soundness:
– is a solution returned by the algorithm guaranteed to be correct?
• Completeness: – is the algorithm guaranteed to find a solution when there is one?
• Time complexity: – how long does it take to find a solution?
• Space complexity: – how much memory does it need to perform search?
14
Brian Williams, Spring 03 28
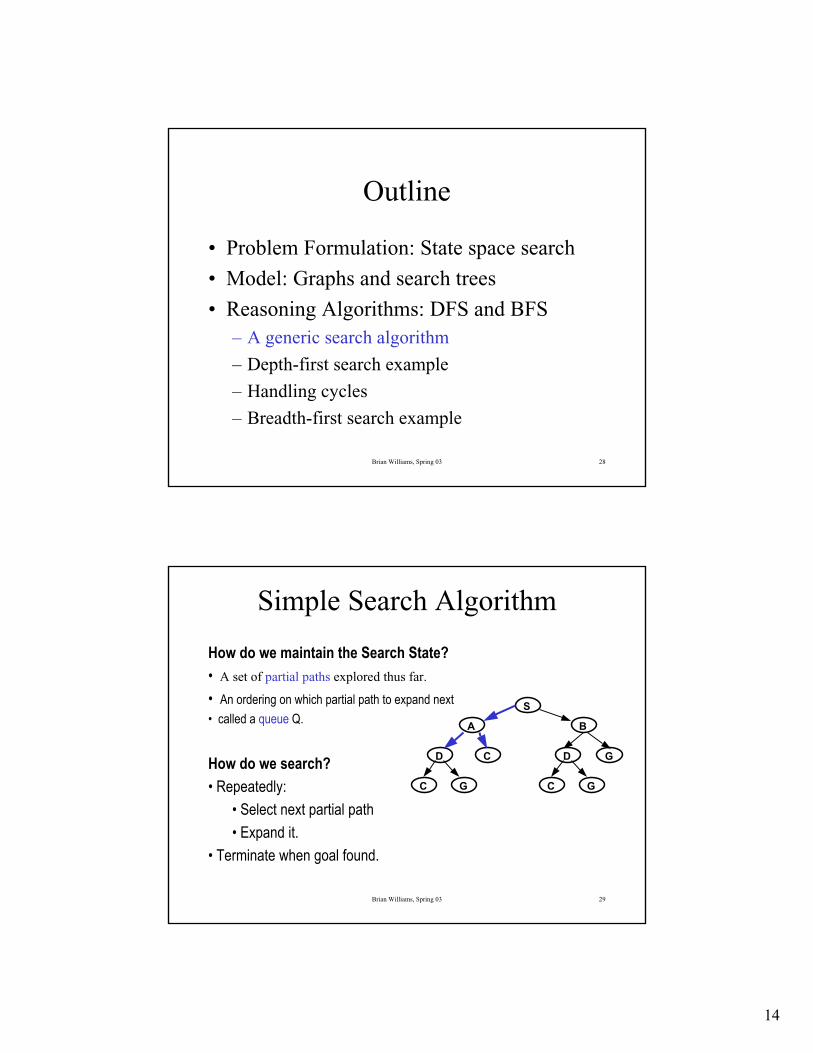
Outline
• Problem Formulation: State space search
• Model: Graphs and search trees
• Reasoning Algorithms: DFS and BFS– A generic search algorithm
– Depth-first search example
– Handling cycles
– Breadth-first search example
Brian Williams, Spring 03 29
Simple Search Algorithm
How do we maintain the Search State?• A set of partial paths explored thus far.
• An ordering on which partial path to expand next • called a queue Q.
How do we search? • Repeatedly:
• Select next partial path • Expand it.
• Terminate when goal found.
S
D
BA
C G
C G
D
C G
15
Brian Williams, Spring 03 30
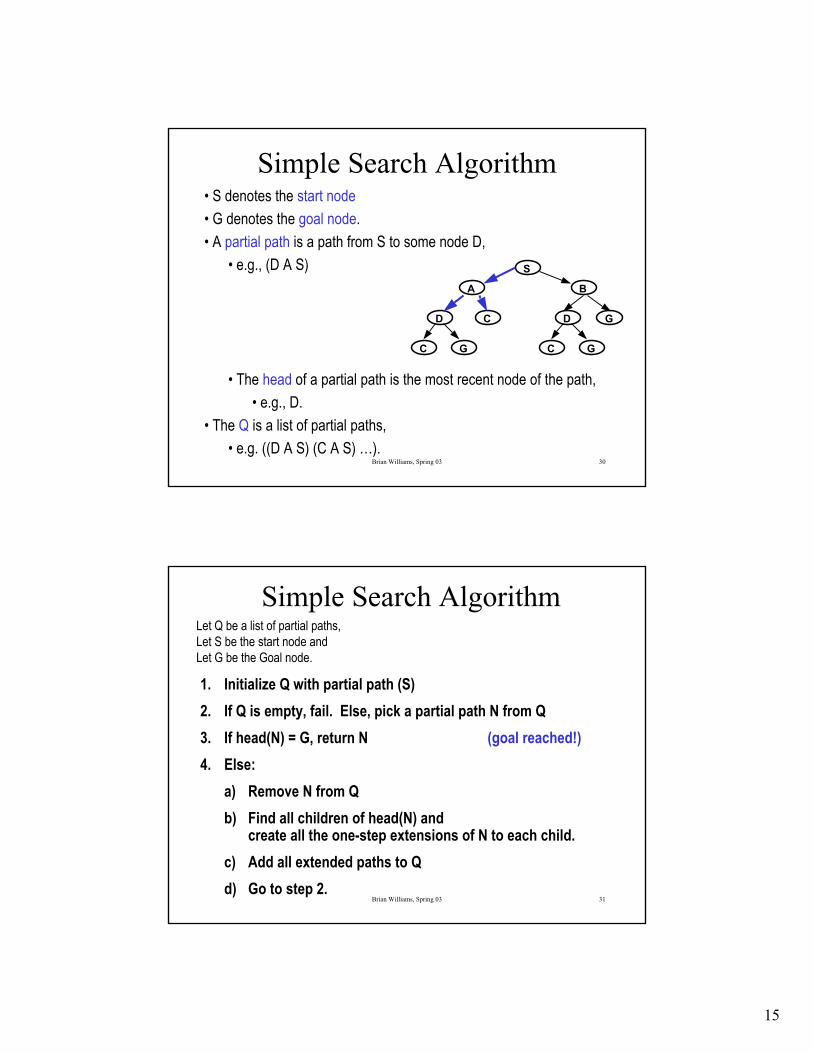
Simple Search Algorithm• S denotes the start node• G denotes the goal node.• A partial path is a path from S to some node D,
• e.g., (D A S)
• The head of a partial path is the most recent node of the path, • e.g., D.
• The Q is a list of partial paths, • e.g. ((D A S) (C A S) …).
S
D
BA
C G
C G
D
C G
Brian Williams, Spring 03 31
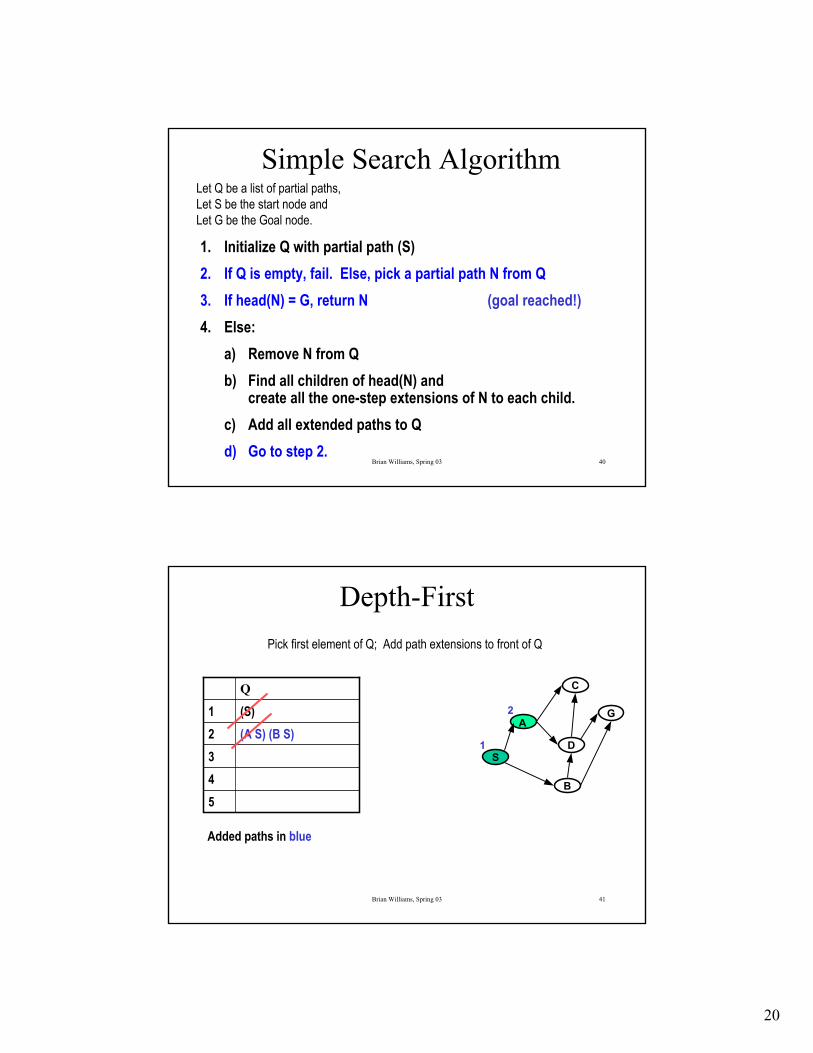
Simple Search AlgorithmLet Q be a list of partial paths, Let S be the start node and Let G be the Goal node.
1. Initialize Q with partial path (S)2. If Q is empty, fail. Else, pick a partial path N from Q3. If head(N) = G, return N (goal reached!)4. Else:
a) Remove N from Qb) Find all children of head(N) and
create all the one-step extensions of N to each child.c) Add all extended paths to Qd) Go to step 2.

16
Brian Williams, Spring 03 32
Outline
• Problem Formulation: State space search
• Model: Graphs and search trees
• Reasoning Algorithms: DFS and BFS– A generic search algorithm
– Depth-first search example
– Handling cycles
– Breadth-first search example
Brian Williams, Spring 03 33
Depth First Search (DFS)
S
D
BA
C G
C G
D
C G
Idea: •Explore descendants before siblings•Explore siblings left to right
1
2
3
4 5
6
7
8
9 10
11
S
A
D
C G
C
B
D
C G
G
Where do we place the children on the queue?• Assume we pick first element of Q• Add path extensions to ? of Q
17
Brian Williams, Spring 03 34
Simple Search AlgorithmLet Q be a list of partial paths, Let S be the start node and Let G be the Goal node.
1. Initialize Q with partial path (S)2. If Q is empty, fail. Else, pick a partial path N from Q3. If head(N) = G, return N (goal reached!)4. Else:
a) Remove N from Qb) Find all children of head(N) and
create all the one-step extensions of N to each child.c) Add all extended paths to Qd) Go to step 2.
Brian Williams, Spring 03 35
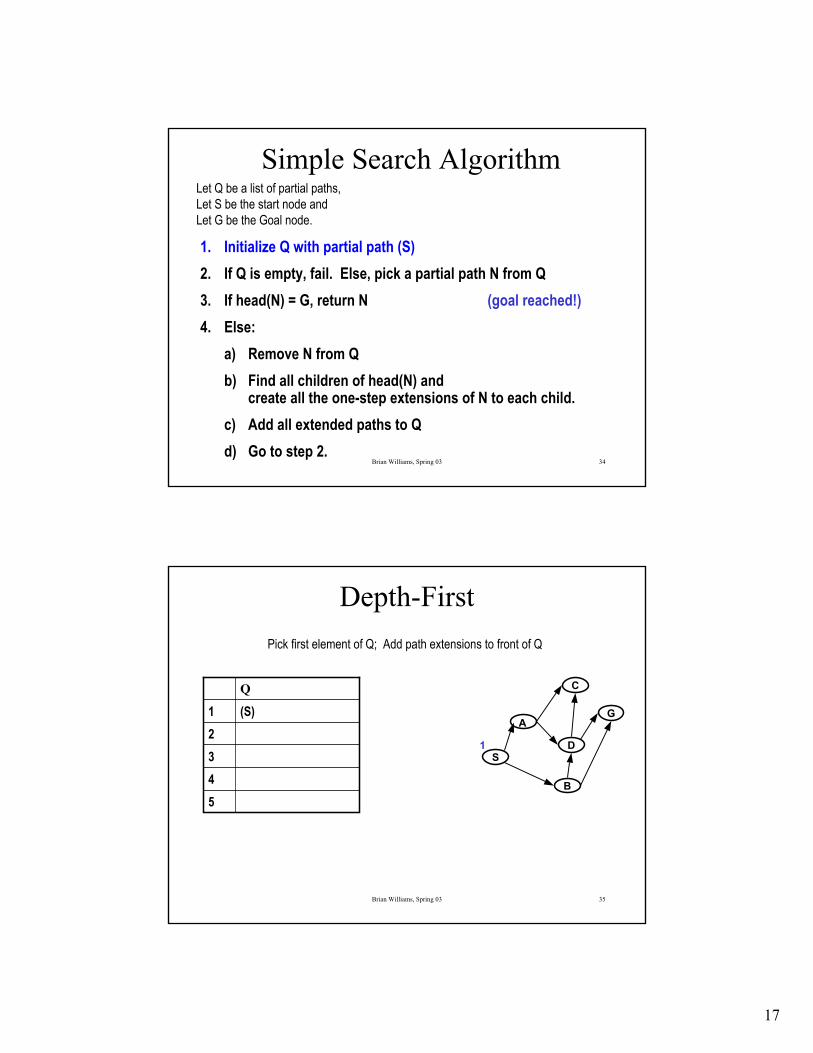
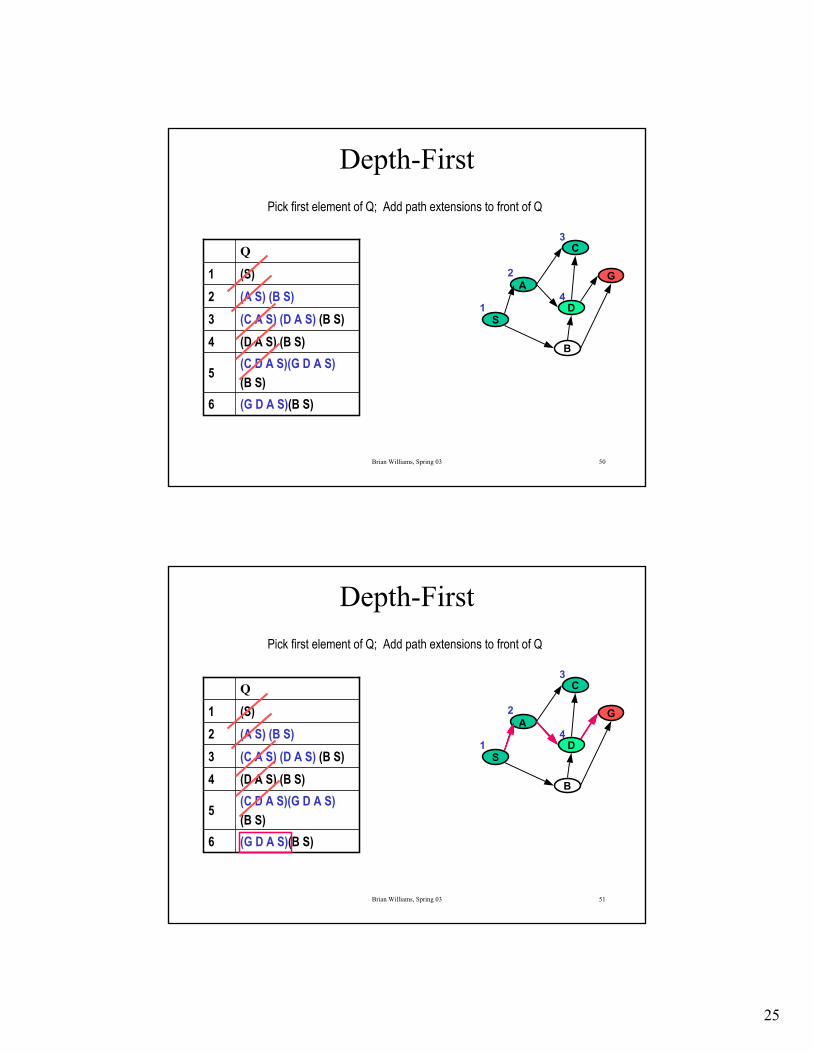
Depth-First
Pick first element of Q; Add path extensions to front of Q
C
S
B
GA
D
Q
54321 (S)
1
18
Brian Williams, Spring 03 36
Simple Search AlgorithmLet Q be a list of partial paths, Let S be the start node and Let G be the Goal node.
1. Initialize Q with partial path (S)2. If Q is empty, fail. Else, pick a partial path N from Q3. If head(N) = G, return N (goal reached!)4. Else:
a) Remove N from Qb) Find all children of head(N) and
create all the one-step extensions of N to each child.c) Add all extended paths to Qd) Go to step 2.
Brian Williams, Spring 03 37
C
S
B
GA
D
Q
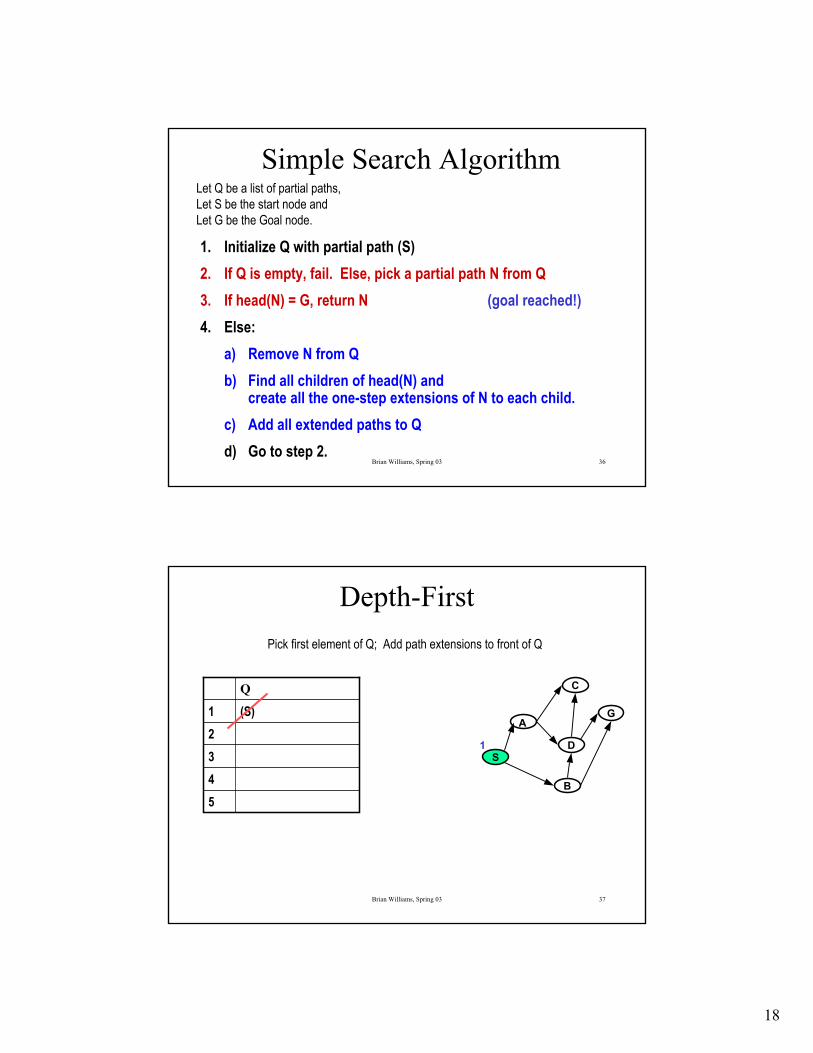
54321 (S)
1
Depth-First
Pick first element of Q; Add path extensions to front of Q
19
Brian Williams, Spring 03 38
C
S
B
GA
D
Q
54321
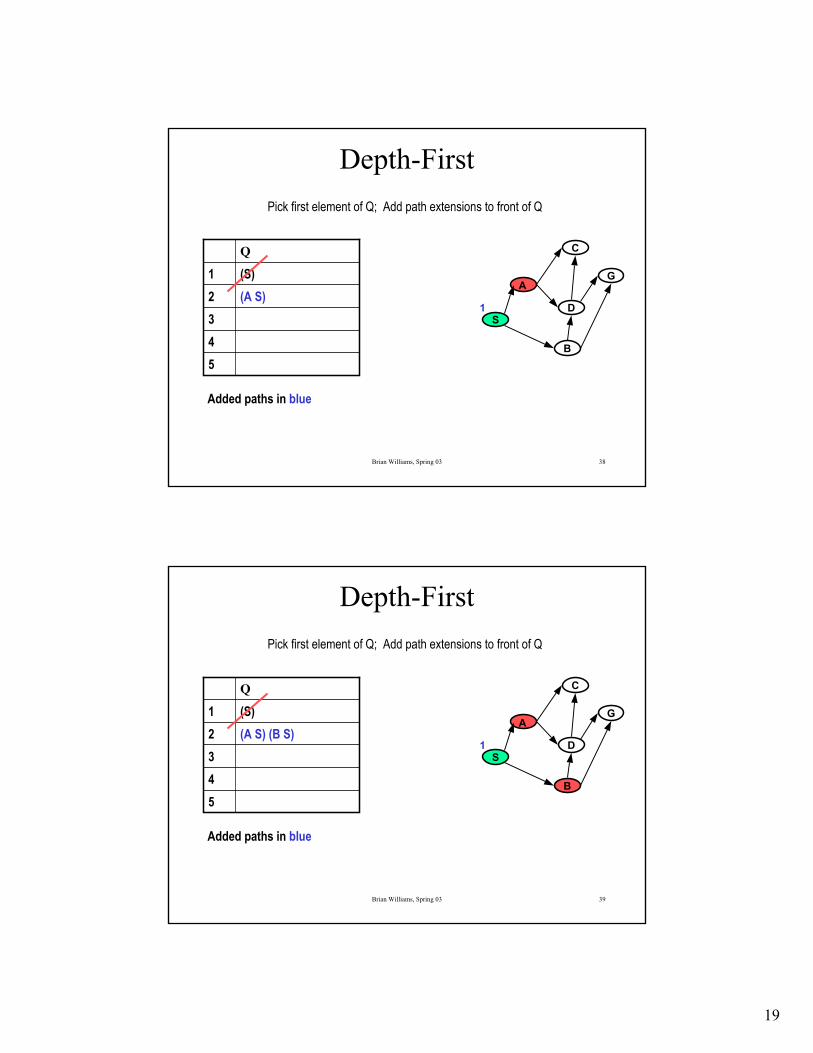
(A S)(S)
1
Added paths in blue
Depth-First
Pick first element of Q; Add path extensions to front of Q
Brian Williams, Spring 03 39
C
S
B
GA
D
Q
54321
(A S) (B S)(S)
1
Added paths in blue
Depth-First
Pick first element of Q; Add path extensions to front of Q
20
Brian Williams, Spring 03 40
Simple Search AlgorithmLet Q be a list of partial paths, Let S be the start node and Let G be the Goal node.
1. Initialize Q with partial path (S)2. If Q is empty, fail. Else, pick a partial path N from Q3. If head(N) = G, return N (goal reached!)4. Else:
a) Remove N from Qb) Find all children of head(N) and
create all the one-step extensions of N to each child.c) Add all extended paths to Qd) Go to step 2.
Brian Williams, Spring 03 41
C
S
B
GA
D
Q
54321
(A S) (B S)(S)
1
Added paths in blue
2
Depth-First
Pick first element of Q; Add path extensions to front of Q
21
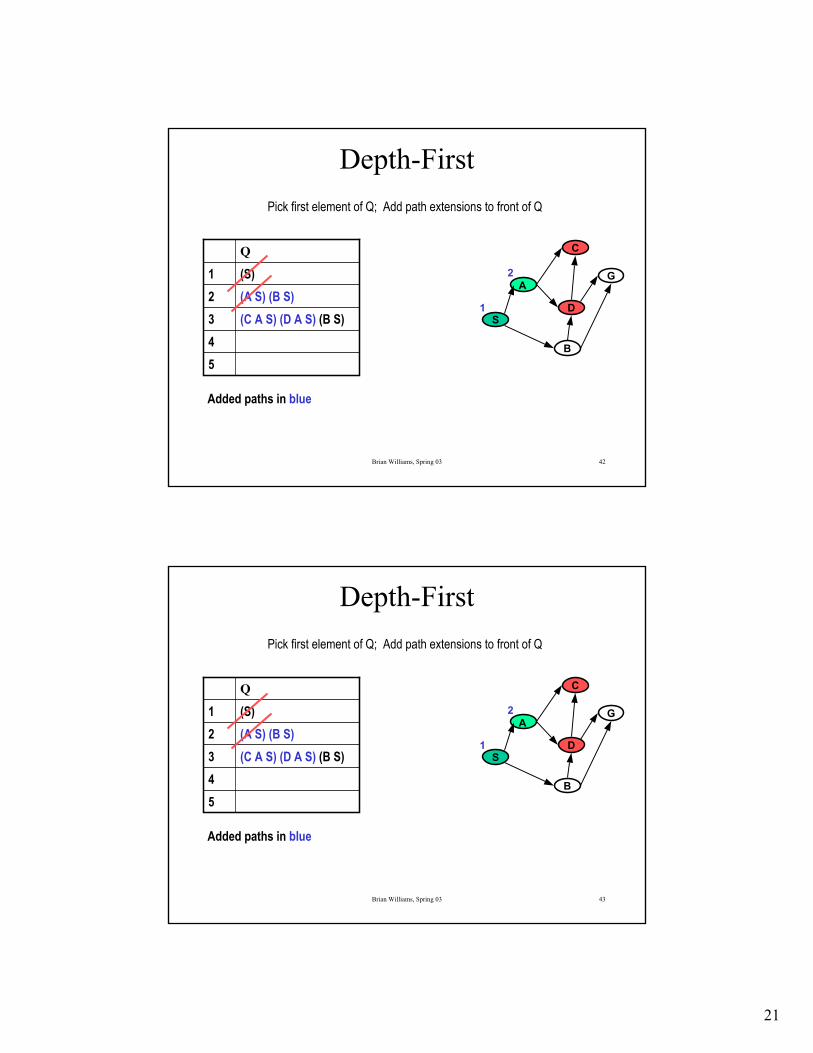
Brian Williams, Spring 03 42
C
S
B
GA
D
Q
54321
(C A S) (D A S) (B S)(A S) (B S)(S)
1
2
Depth-First
Pick first element of Q; Add path extensions to front of Q
Added paths in blue
Brian Williams, Spring 03 43
C
S
B
GA
D
Q
54321
(C A S) (D A S) (B S)(A S) (B S)(S)
1
2
Depth-First
Pick first element of Q; Add path extensions to front of Q
Added paths in blue

22
Brian Williams, Spring 03 44
C
S
B
GA
D
Q
54321
(C A S) (D A S) (B S)(A S) (B S)(S)
1
2
3
Depth-First
Pick first element of Q; Add path extensions to front of Q
Added paths in blue
Brian Williams, Spring 03 45
C
S
B
GA
D
Q
54321
(D A S) (B S)(C A S) (D A S) (B S)(A S) (B S)(S)
1
2
3
Depth-First
Pick first element of Q; Add path extensions to front of Q
Added paths in blue
23
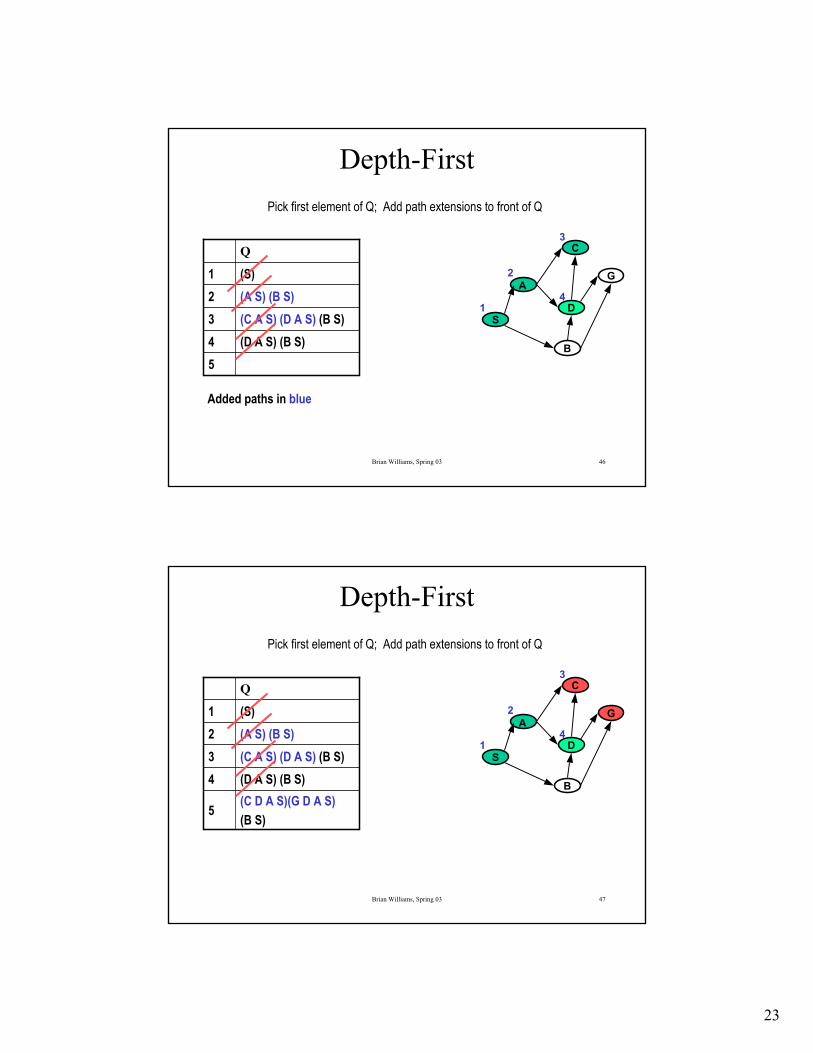
Brian Williams, Spring 03 46
C
S
B
GA
D
Q
54321
(D A S) (B S)(C A S) (D A S) (B S)(A S) (B S)(S)
1
2
3
4
Depth-First
Pick first element of Q; Add path extensions to front of Q
Added paths in blue
Brian Williams, Spring 03 47
C
S
B
GA
D
Q
5
4321
(C D A S)(G D A S)(B S)
(D A S) (B S)(C A S) (D A S) (B S)(A S) (B S)(S)
1
2
3
4
Depth-First
Pick first element of Q; Add path extensions to front of Q
24
Brian Williams, Spring 03 48
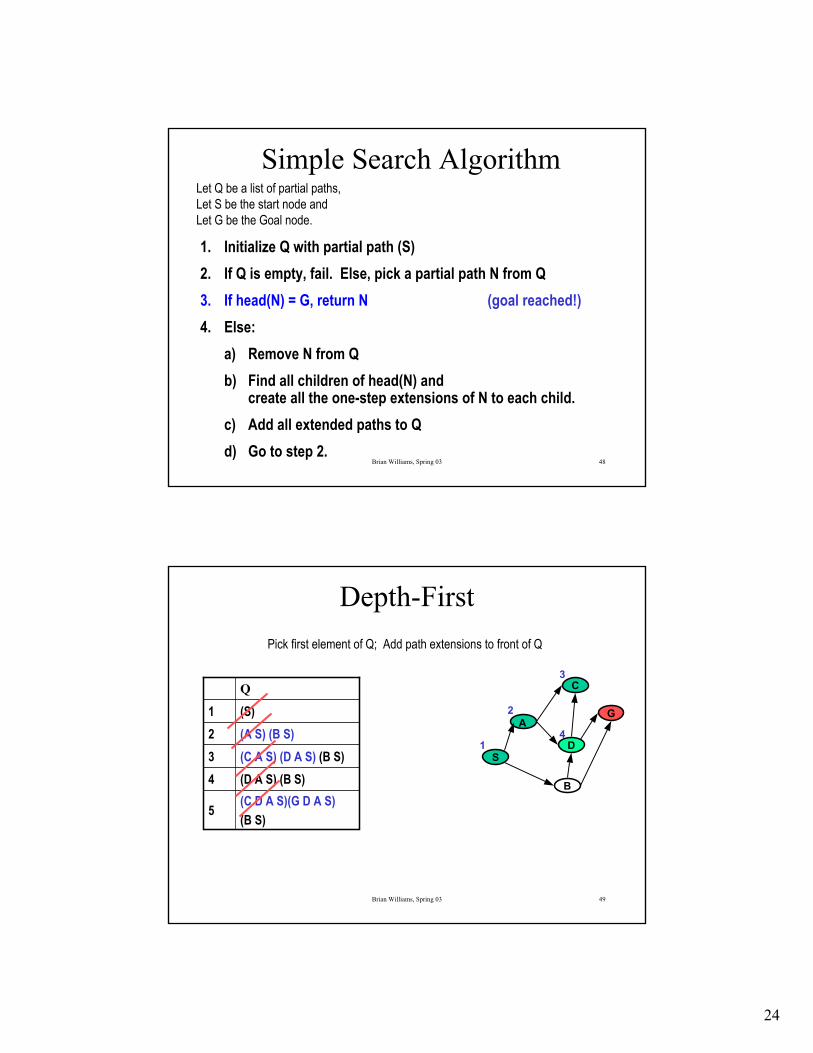
Simple Search AlgorithmLet Q be a list of partial paths, Let S be the start node and Let G be the Goal node.
1. Initialize Q with partial path (S)2. If Q is empty, fail. Else, pick a partial path N from Q3. If head(N) = G, return N (goal reached!)4. Else:
a) Remove N from Qb) Find all children of head(N) and
create all the one-step extensions of N to each child.c) Add all extended paths to Qd) Go to step 2.
Brian Williams, Spring 03 49
C
S
B
GA
D
Q
5
4321
(C D A S)(G D A S)(B S)
(D A S) (B S)(C A S) (D A S) (B S)(A S) (B S)(S)
1
2
3
4
Depth-First
Pick first element of Q; Add path extensions to front of Q
25
Brian Williams, Spring 03 50
C
S
B
GA
D
(G D A S)(B S)6
Q
5
4321
(C D A S)(G D A S)(B S)
(D A S) (B S)(C A S) (D A S) (B S)(A S) (B S)(S)
1
2
3
4
Depth-First
Pick first element of Q; Add path extensions to front of Q
Brian Williams, Spring 03 51
C
S
B
GA
D
(G D A S)(B S)6
Q
5
4321
(C D A S)(G D A S)(B S)
(D A S) (B S)(C A S) (D A S) (B S)(A S) (B S)(S)
1
2
3
4
Depth-First
Pick first element of Q; Add path extensions to front of Q
26
Brian Williams, Spring 03 52
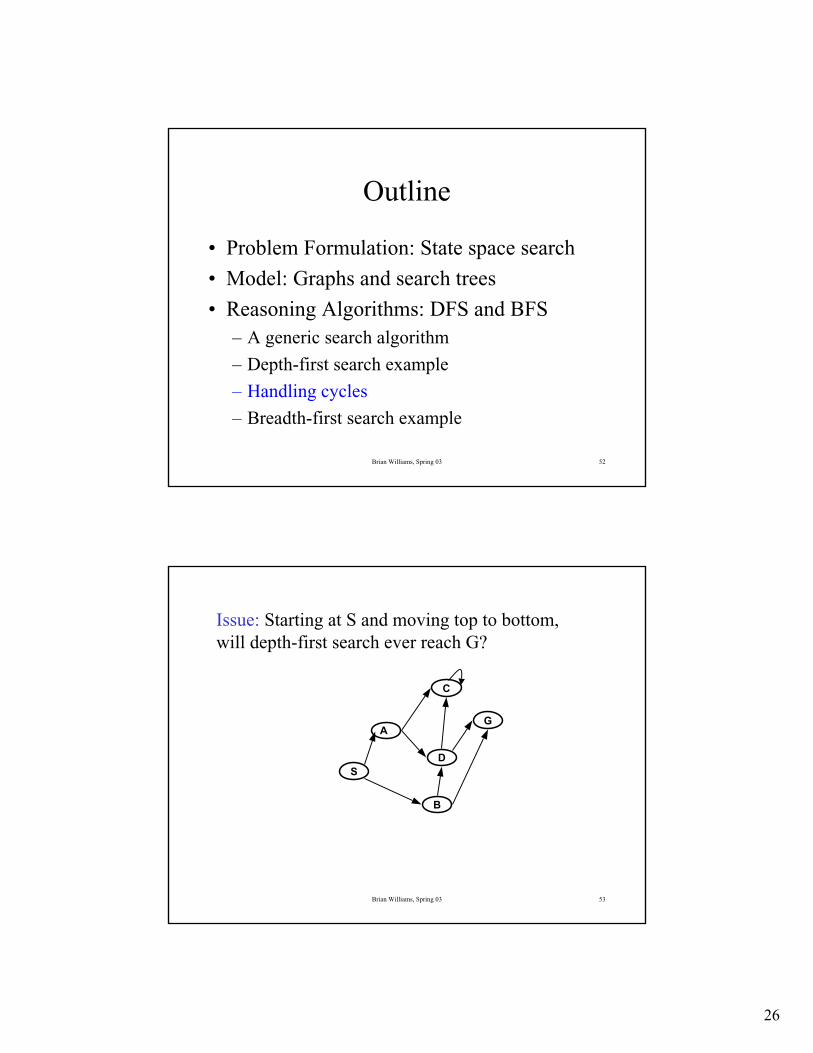
Outline
• Problem Formulation: State space search
• Model: Graphs and search trees
• Reasoning Algorithms: DFS and BFS– A generic search algorithm
– Depth-first search example
– Handling cycles
– Breadth-first search example
Brian Williams, Spring 03 53
C
S
B
GA
D
Issue: Starting at S and moving top to bottom, will depth-first search ever reach G?
27
Brian Williams, Spring 03 54
C
S
B
GA
D
(G D A S)(B S)6
Q
5
4321
(C D A S)(G D A S)(B S)
(D A S) (B S)(C A S) (D A S) (B S)(A S) (B S)(S)
1
2
3
4
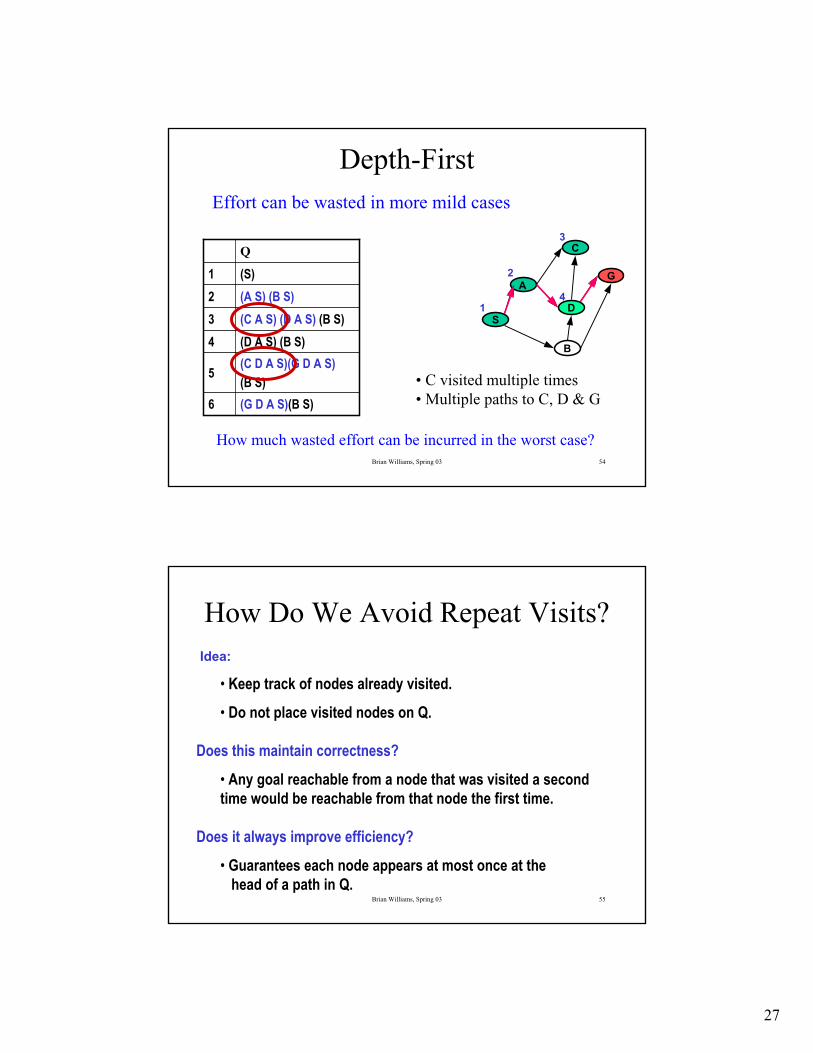
Depth-First
• C visited multiple times• Multiple paths to C, D & G
How much wasted effort can be incurred in the worst case?
Effort can be wasted in more mild cases
Brian Williams, Spring 03 55
How Do We Avoid Repeat Visits?Idea:
• Keep track of nodes already visited.
• Do not place visited nodes on Q.
Does this maintain correctness?
• Any goal reachable from a node that was visited a second time would be reachable from that node the first time.
Does it always improve efficiency?
• Guarantees each node appears at most once at the head of a path in Q.
28
Brian Williams, Spring 03 56
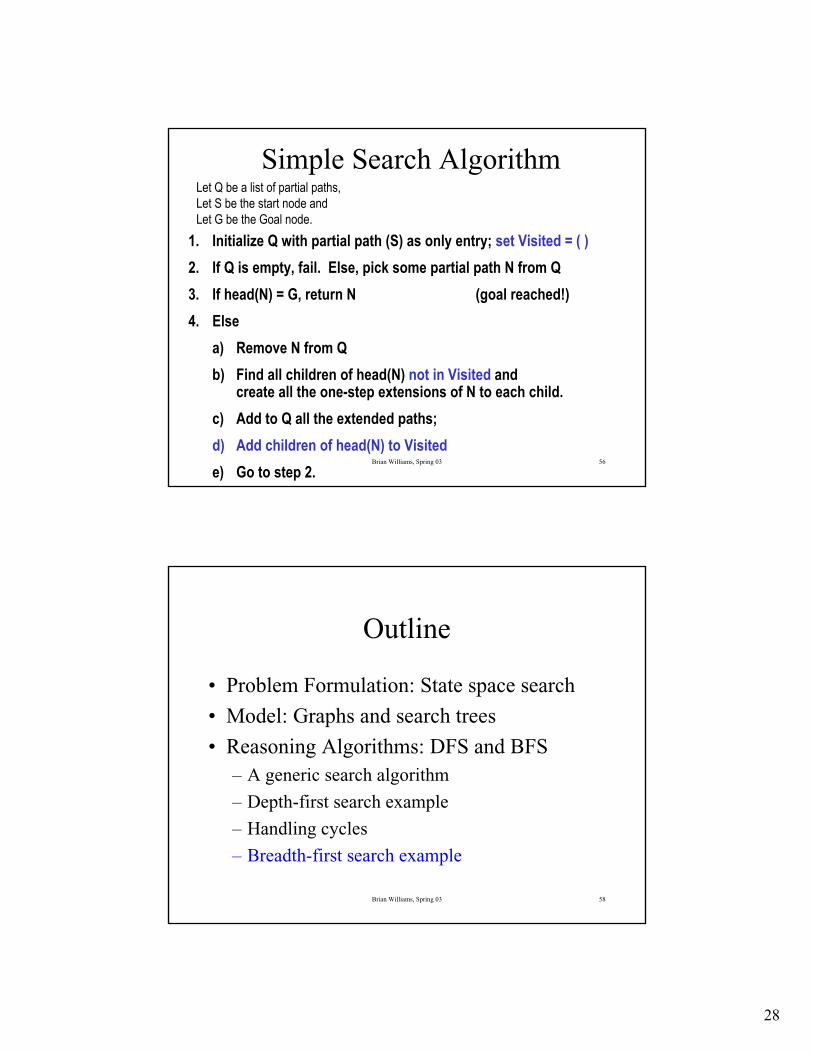
Simple Search AlgorithmLet Q be a list of partial paths, Let S be the start node and Let G be the Goal node.
1. Initialize Q with partial path (S) as only entry; set Visited = ( )2. If Q is empty, fail. Else, pick some partial path N from Q3. If head(N) = G, return N (goal reached!)4. Else
a) Remove N from Qb) Find all children of head(N) not in Visited and
create all the one-step extensions of N to each child.c) Add to Q all the extended paths; d) Add children of head(N) to Visitede) Go to step 2.
Brian Williams, Spring 03 58
Outline
• Problem Formulation: State space search
• Model: Graphs and search trees
• Reasoning Algorithms: DFS and BFS– A generic search algorithm
– Depth-first search example
– Handling cycles
– Breadth-first search example
29
Brian Williams, Spring 03 59
Breadth First Search (BFS)
S
D
BA
C G
C G
D
C G
Idea: •Explore relatives at same level before their children•Explore relatives left to right
1
2
4
8 9
5
3
6
10 11
7
S
A
D
C G
C
B
D
C G
G
Where do we place the children on the queue?• Assume we pick first element of Q• Add path extensions to ? of Q
Brian Williams, Spring 03 60
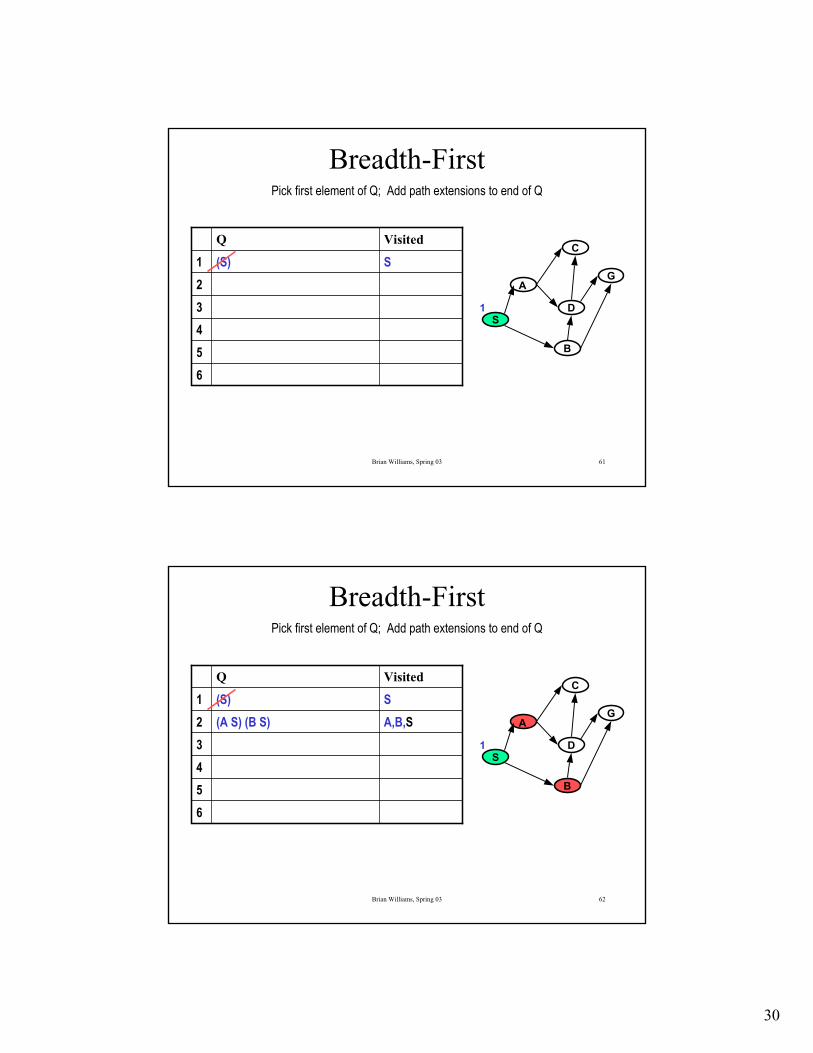
Breadth-FirstPick first element of Q; Add path extensions to end of Q
C
S
B
GA
D
6
VisitedQ
54321 S(S)
1
30
Brian Williams, Spring 03 61
Breadth-FirstPick first element of Q; Add path extensions to end of Q
C
S
B
GA
D
6
VisitedQ
54321 S(S)
1
Brian Williams, Spring 03 62
Breadth-FirstPick first element of Q; Add path extensions to end of Q
C
S
B
GA
D
6
VisitedQ
54321
A,B,S(A S) (B S)S(S)
1
31
Brian Williams, Spring 03 63
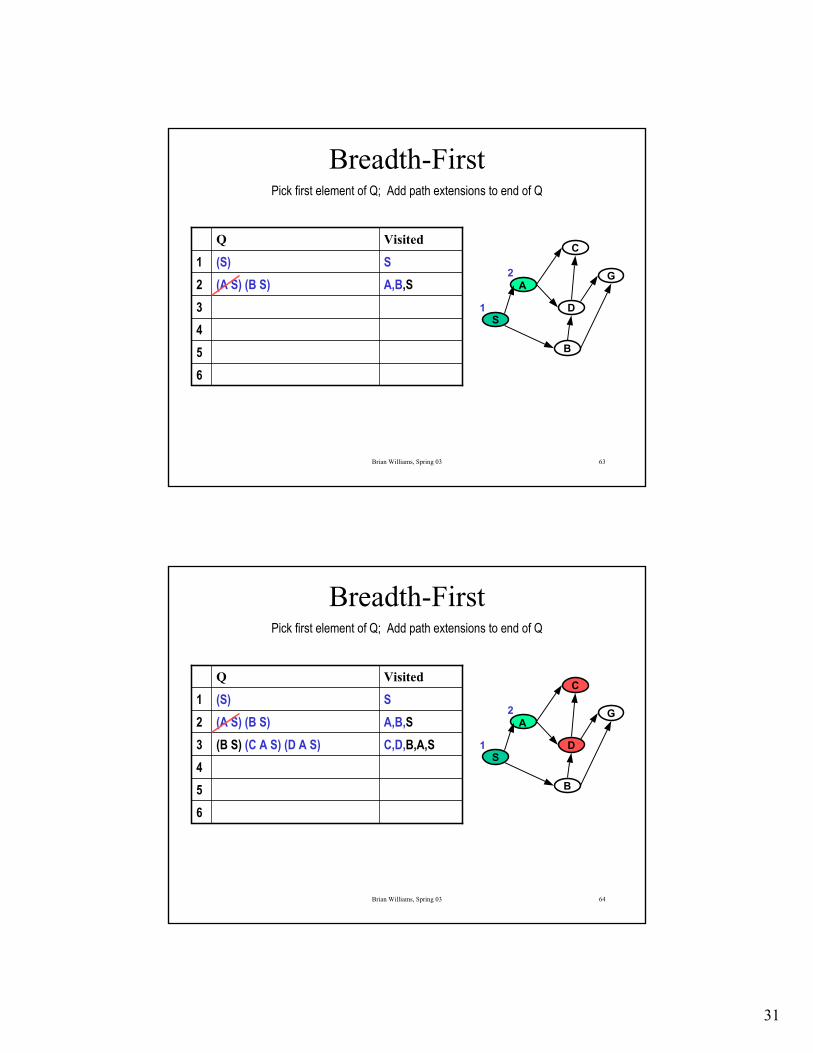
Breadth-FirstPick first element of Q; Add path extensions to end of Q
C
S
B
GA
D
6
VisitedQ
54321
A,B,S(A S) (B S)S(S)
1
2
Brian Williams, Spring 03 64
Breadth-FirstPick first element of Q; Add path extensions to end of Q
C
S
B
GA
D
6
VisitedQ
54321
C,D,B,A,S(B S) (C A S) (D A S)A,B,S(A S) (B S)S(S)
1
2
32
Brian Williams, Spring 03 65
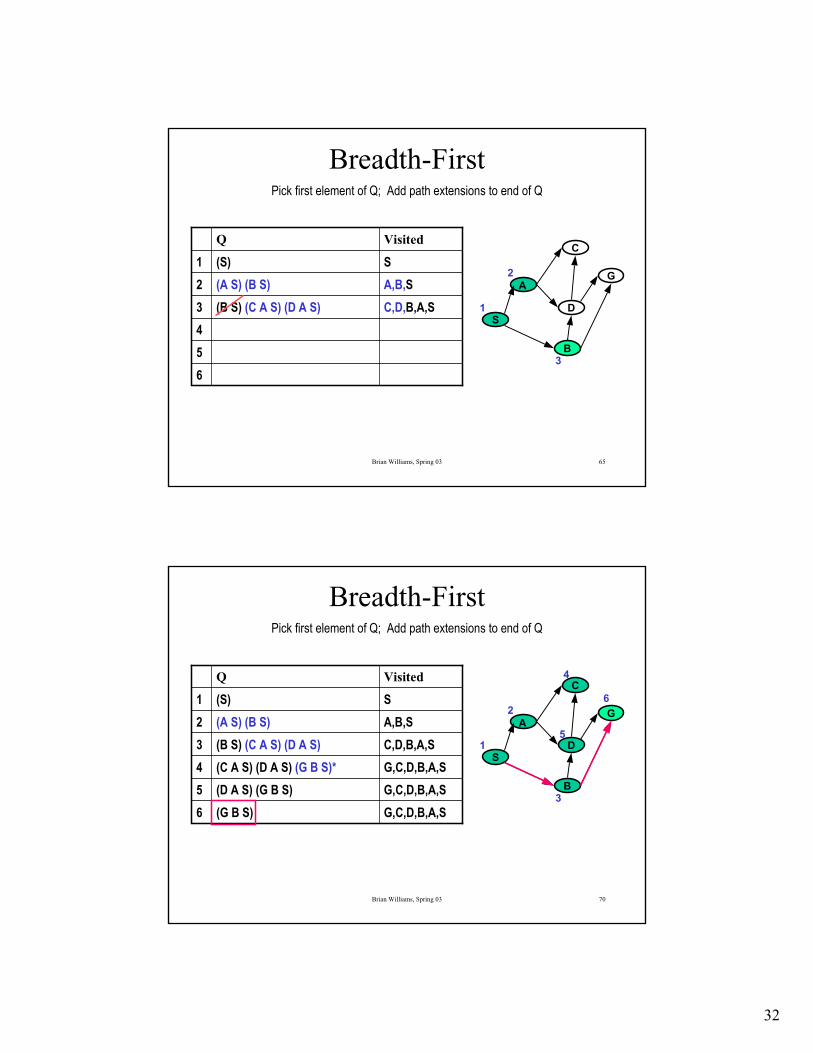
Breadth-FirstPick first element of Q; Add path extensions to end of Q
C
S
B
GA
D
6
VisitedQ
54321
C,D,B,A,S(B S) (C A S) (D A S)A,B,S(A S) (B S)S(S)
1
2
3
Brian Williams, Spring 03 70
Breadth-FirstPick first element of Q; Add path extensions to end of Q
C
S
B
GA
D
G,C,D,B,A,S(G B S)6
VisitedQ
54321
G,C,D,B,A,S(D A S) (G B S)G,C,D,B,A,S(C A S) (D A S) (G B S)*C,D,B,A,S(B S) (C A S) (D A S)A,B,S(A S) (B S)S(S)
1
2
3
4
5
6

33
Brian Williams, Spring 03 72
Depth First Search (DFS)S
D
BA
C G
C G
D
C G
S
D
BA
C G
C G
D
C G
Breadth First Search (BFS)
For each search type, where do we place the children on the queue?
Depth-first:
Add path extensions to front of Q
Pick first element of Q
Breadth-first:
Add path extensions to back of Q
Pick first element of Q
Brian Williams, Spring 03 73
Summary• Most problem solving tasks may be
formulated as state space search.• Mathematical representations for search are
graphs and search trees.• Depth-first and breadth-first search may be
framed, among others, as instances of a generic search strategy.
• Cycle detection is required to achieve efficiency and completeness.
34
Brian Williams, Spring 03 74
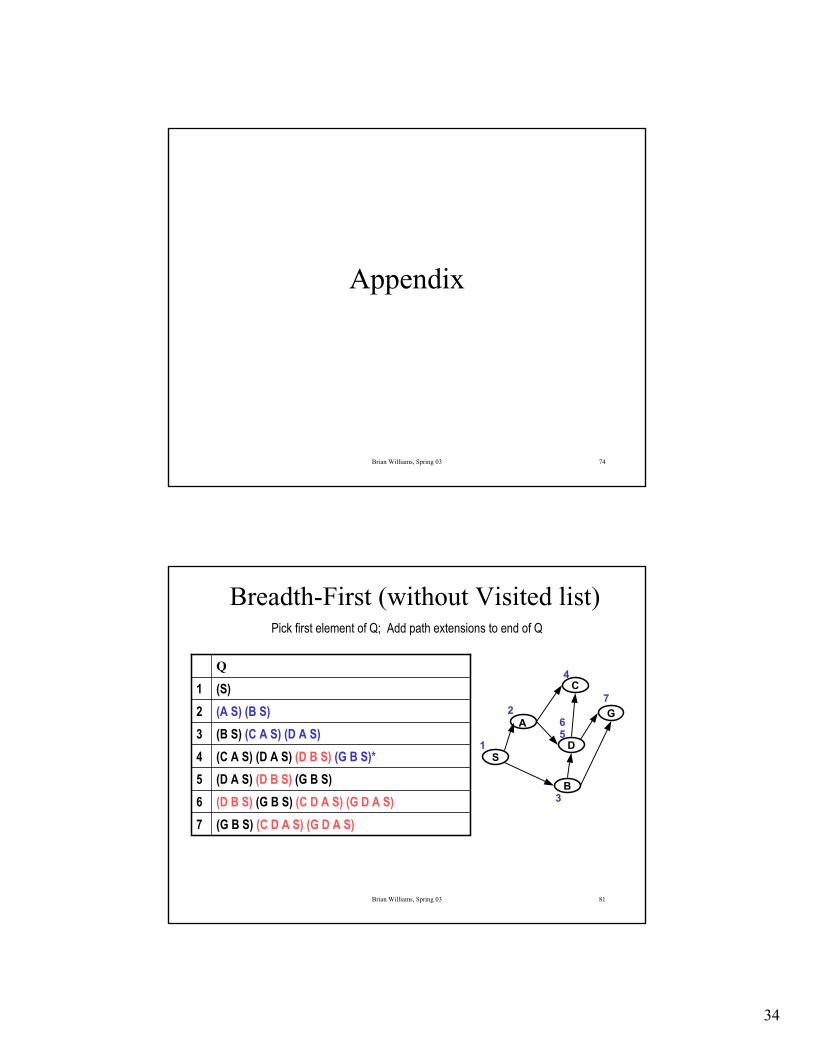
Appendix
Brian Williams, Spring 03 81
Breadth-First (without Visited list)Pick first element of Q; Add path extensions to end of Q
C
S
B
GA
D
(G B S) (C D A S) (G D A S)7(D B S) (G B S) (C D A S) (G D A S)6
Q
54321
(D A S) (D B S) (G B S)(C A S) (D A S) (D B S) (G B S)*(B S) (C A S) (D A S)(A S) (B S)(S)
1
2
3
4
56
7


![A Game-Theoretic Approach for Power Systems Defense ... · problem for system protection is discussed in [27]. In [28], the authors formulate the problem as a minmax non-cooperative](https://static.fdocuments.net/doc/165x107/60151569e89e76431a239b72/a-game-theoretic-approach-for-power-systems-defense-problem-for-system-protection.jpg)