Presentación PIC GAMA MEDIA
25
Tema 1: Microcontroladores de gama media PIC16F628A / 16F877A
-
Upload
doctolucky -
Category
Documents
-
view
57 -
download
3
description
Microcontroladores de gama media, set de instrucciones y documentacion de puertos de entrada y salida
Transcript of Presentación PIC GAMA MEDIA

Tema 1: Microcontroladores de gama
media PIC16F628A / 16F877A

COMPARACIÓN ENTRE PIC’s GAMA MEDIA

EL MICROCONTROLADORPIC16F628A

Características principales Conjunto reducido de instrucciones (RISC). Solamente 35 instrucciones
que aprender a utilizar.
Oscilador interno de 4MHz.
Las instrucciones se ejecutan en un sólo ciclo de máquina excepto los saltos (goto y call), que requieren 2 ciclos. Aquí hay que especificar que un ciclo de máquina se lleva 4 ciclos de reloj, si se utiliza el reloj interno de 4MHz, los ciclos de máquina se realizarán con una frecuencia de 1MHz, es decir que cada instrucción se ejecutará en 1uS (microsegundo)
Opera con una frecuencia de reloj de hasta 20 MHz (ciclo de máquina de 200 ns)
Memoria de programa: 2048 locaciones de 14 bits
Memoria de datos: Memoria RAM de 224 bytes (8 bits por registro)
Memoria EEPROM: 128 bytes (8 bits por registro)
Stack de 8 niveles
16 Terminales de I/O que soportan corrientes de hasta 25 mA
3 Temporizadores
Módulos de comunicación serie, comparadores, PWM
MANEJO DEL PIC 16F628A

Pines:MANEJO DEL PIC 16F628A

PORTA: RA0-RA7:
Los pines RA0-RA4 y RA6–RA7 son bidireccionales y manejan señales TTL
El pin RA5 es una entrada Schmitt Trigger que sirve también para entrar en el modo de programación cuando se aplica una tensión igual a Vpp (13,4V mínimo)
El terminal RA4/T0CKI puede configurarse como reloj de entrada para el contador TMR0
Los pines RA0-RA3 sirven de entrada para el comparador analógico
PORTB: RB0-RB7:
Los pines RB0-RB7 son bidireccionales y manejan señales TTL
Por software se pueden activar las resistencias de pull-up internas, que evitan el uso de resistencias externas en caso de que los terminales se utilicen como entrada.
El pin RB0 se puede utilizar como entrada de pulsos para provocar una interrupción externa
Los pines RB4-RB7 están diseñados para detectar una interrupción por cambio de estado.
El pin RB6/T1CKI puede configurarse como contador de pulsos externos para el TMR1.
MANEJO DEL PIC 16F628A

Otros pines VDD: Pin de alimentación positiva. De 2 a 5,5 Vcc VSS: Pin de alimentación a tierra (Ground) 0 Volt. MCLR: Master Clear (Reset). Si el nivel lógico de este
terminal es bajo (0 Vcc), el microcontrolador permanece inactivo. Este Reset se controla mediante la palabra de configuración del PIC.
OSC1/CLKIN: Entrada de oscilador externo. OSC2/CLKOUT: Salida del oscilador. El PIC 16F628A
dependiendo de cómo se configure puede proporcionar una salida de reloj por medio de este pin.
MANEJO DEL PIC 16F628A

El pic 16F628A tiene 10 fuentes de interrupción, Las fuentes de interrupción son:
Interrupción externa RB0/INT Interrupción por cambio lógico en el puerto B (pines
RB7 a RB4) Interrupción por desborde del timer 0 (TMR0) Interrupción por desborde del timer 1 (TMR1) Interrupción por comparación exitosa en TMR2 Interrupción del comparador Interrupción del transmisor del USART Interrupción del receptor del USART Interrupción del módulo CCP Interrupción del EEPROM
MANEJO DEL PIC 16F628A

MANEJO DEL PIC 16F628A


EL MICROCONTROLADORPIC16F877A

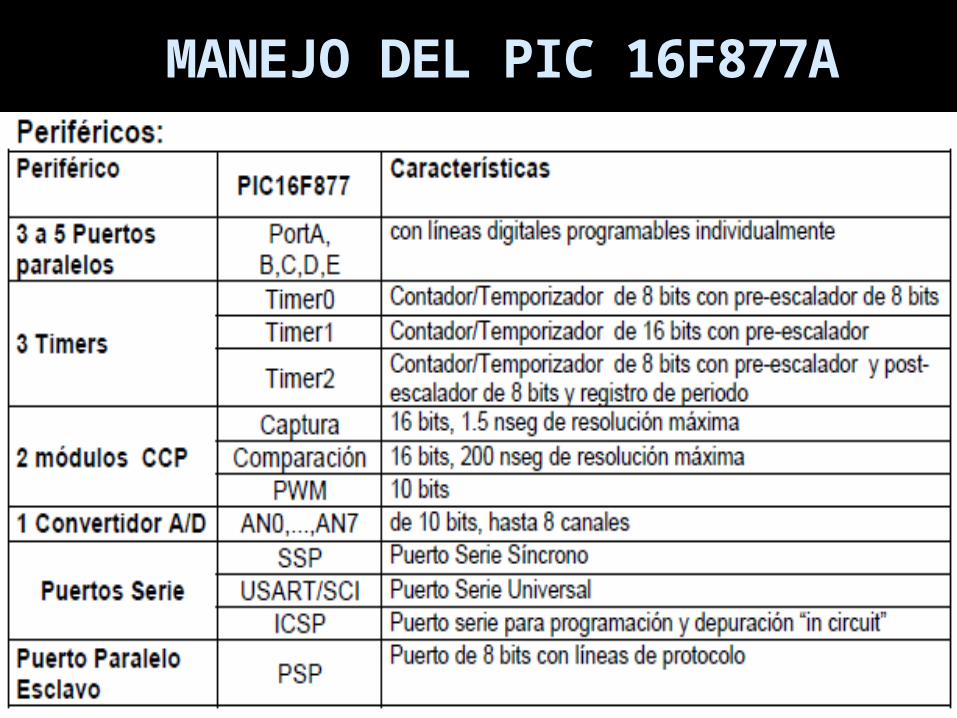
MANEJO DEL PIC 16F877A

MANEJO DEL PIC 16F877A
MANEJO DEL PIC 16F877A
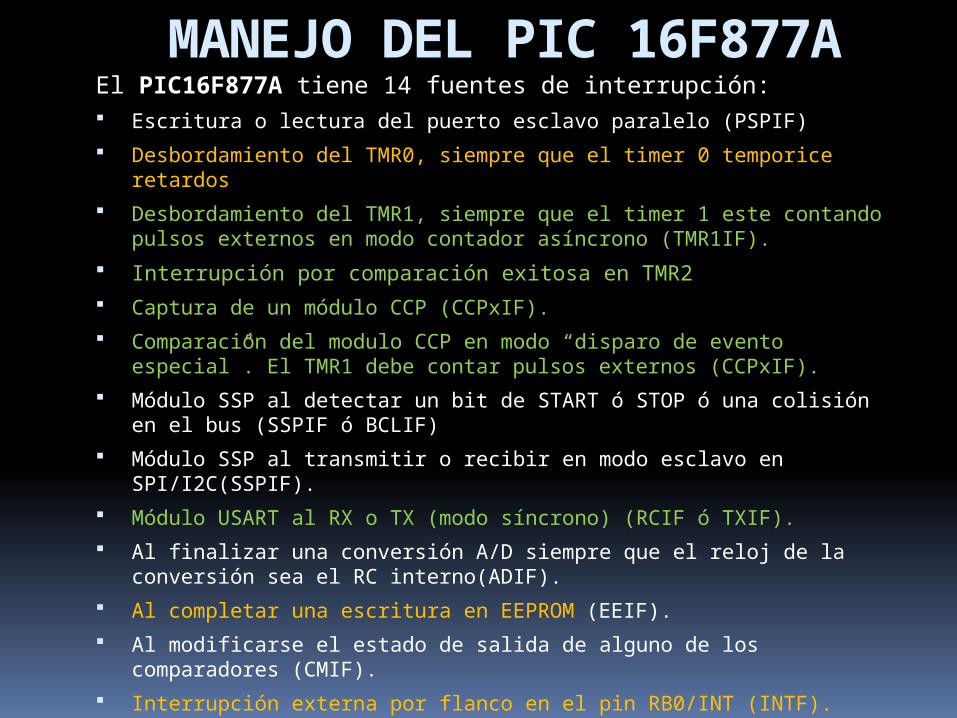
El PIC16F877A tiene 14 fuentes de interrupción: Escritura o lectura del puerto esclavo paralelo (PSPIF)
Desbordamiento del TMR0, siempre que el timer 0 temporice retardos
Desbordamiento del TMR1, siempre que el timer 1 este contando pulsos externos en modo contador asíncrono (TMR1IF).
Interrupción por comparación exitosa en TMR2
Captura de un módulo CCP (CCPxIF).
Comparación del modulo CCP en modo “disparo de evento especial”. El TMR1 debe contar pulsos externos (CCPxIF).
Módulo SSP al detectar un bit de START ó STOP ó una colisión en el bus (SSPIF ó BCLIF)
Módulo SSP al transmitir o recibir en modo esclavo en SPI/I2C(SSPIF).
Módulo USART al RX o TX (modo síncrono) (RCIF ó TXIF).
Al finalizar una conversión A/D siempre que el reloj de la conversión sea el RC interno(ADIF).
Al completar una escritura en EEPROM (EEIF).
Al modificarse el estado de salida de alguno de los comparadores (CMIF).
Interrupción externa por flanco en el pin RB0/INT (INTF).
Interrupción por cambio en los valores de los pines RB4 a RB7 del PORTB (RBIF).
MANEJO DEL PIC 16F877A

MANEJO DEL PIC 16F877A

MANEJO DEL PIC 16F877A

MANEJO DEL PIC 16F877A

MANEJO DEL PIC 16F877A

MANEJO DEL PIC 16F877A

En programación básica las instrucciones en C correspondientes al PIC: 16F84A son compatibles con las instrucciones para los PIC: 16F628A y 16F877A.
Se deben considerar algunos aspectos como el número y nombre de los puertos, número de timers, etc.
En cuanto a los módulos KBD.c y LCD.c se deben ajustar a los requerimientos y puertos disponibles de los PICs 16F628A y 16F877A.
Programación básica en C PICs 16F628A y 16F877A

Ejemplo para el PIC16F628A
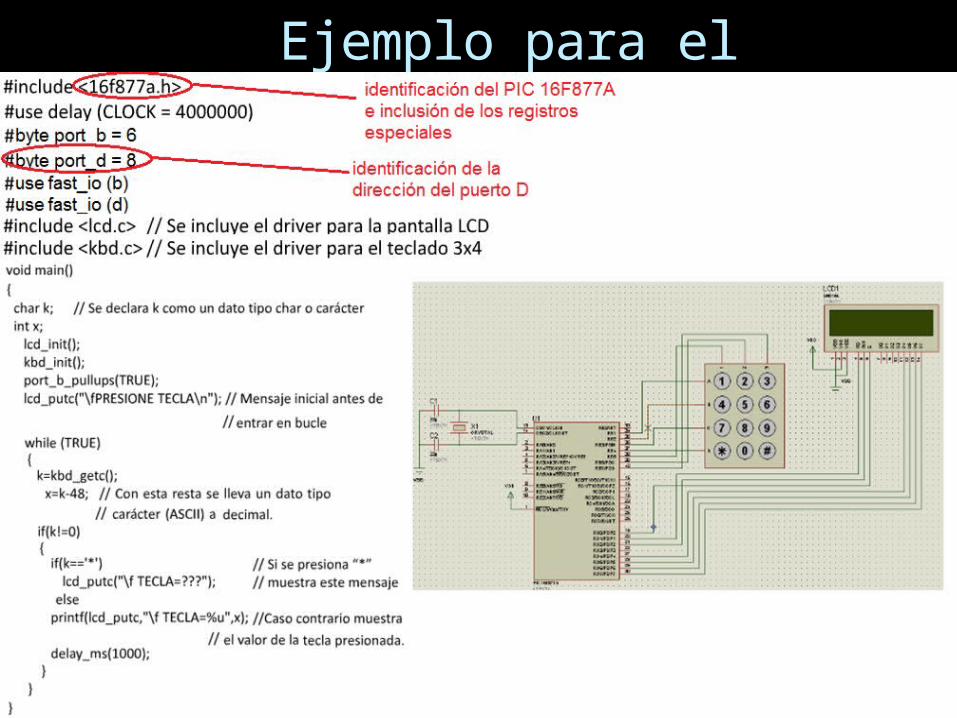
Ejemplo para el PIC16F877A

FIN DE LA PRESENTACIÓN



![La Gama Alta de Los PIC(18F452)[1]](https://static.fdocuments.net/doc/165x107/5571fb7e4979599169950623/la-gama-alta-de-los-pic18f4521.jpg)