
Presentacion fundamentos de control automatico. limer gomez
12
Fundamentos de Control Automático REPÚBLICA BOLIVARIANA DE VENEZUELA. MINISTERIO DEL PODER POPULAR PARA LA EDUCACION SUPERIOR. I.U.S.M POLITECNICO SANTIAGO MARIÑO MATURIN EDO. MONAGAS Autor: Limer Gómez # 19.746.357 Profesora: Mariangela Pollonais Maturín , Julio del 2015
-
Upload
daniel-bastaardoo -
Category
Documents
-
view
21 -
download
2
Transcript of Presentacion fundamentos de control automatico. limer gomez

Fundamentos de Control
Automático
REPÚBLICA BOLIVARIANA DE VENEZUELA. MINISTERIO DEL PODER POPULAR PARA LA EDUCACION
SUPERIOR.I.U.S.M POLITECNICO SANTIAGO MARIÑO
MATURIN EDO. MONAGAS
Autor: Limer Gómez # 19.746.357
Profesora: Mariangela Pollonais
Maturín , Julio del 2015
El control automático a intervenido de manera vital en el progreso de la ingeniería y ciencia, por tal motivo es una pieza clave para contribuir con nuestra sociedad siendo de gran alcance en aéreas industriales de petróleo, gas, generación de energía eléctrica, automovilística, alimentaria, entre otras, mediante el cual es el controlador de diversos mecanismos que regulan variables inherentes al producto tope.
Así mismo es importante tener en cuenta el conocimiento de la teoría y practica de control automático ya que ofrecen medios para obtener el funcionamiento optimo de sistema dinámicos, optimizar la calidad, valorar el costo del producto final mejorándolo y agilizando.
El sistema de control es un conjunto de dispositivos interconectados entre si capaces de regular su conducta o la de otros sistemas para obtener resultados. La ingeniería de control se refiere al estudio del o regulación de sistema físicos
INTRODUCCION

HISTORIA DE LA INGENIERIA DE CONTROL
Las primeras adaptaciones de control con realimentación se basan en los mecanismo de regulados con flotador desarrollados en Grecia el periodo de o 300 a.c. El reloj de agua de ktesibios usaba un reloj con flotador. Una lámpara de aceite inventada por Pilón en el año 250 a.c., usaban un regulador con flotador para mantener un nivel constante de aceite El primer sistema de retroalimentación inventado en la Europa moderna, fue el regulado de temperatura de Cornelis Drebbel (1572-1633) de Holanda. El primer regulador de para calderas de vapor lo invento Dennis Papin( 1647-1633) en 1681 . El regulador de presion de vapor fue semejante a la válvula de una olla de presion
En 1769, el primer regulador con retroalimentación automática usado en un proceso industrial fue el regulados de James Watt desarrollado para controlar la velocidad de una maquina de vapor.
En 1893 Oliver Heaviside publico “On operators in mathematical physisc” trabajo donde desarrollo teorías de calculo operacional permitiendo analizar la ecuación diferencial lineal como una ecuación algebraica, técnica que fue justificada en 1917 por Carson y Bromwich viendo que las ideas de Heaviside se fomentaban en los trabajos de laplace siendo denominada este método “transformada de laplace”
HISTORIA DE LA INGENIERIA DE CONTROL
En 1868 se caracterizo por el desarrollo de los sistemas de control automático inventados intuitivamente por J.C maxwell publicando “On Governors” articulo donde propuso la solución al problema de los reguladores centrífugos, formulando así mismo una ecuación diferencial y analizando un sistema de estabilidad.
En 1922, Minorcky trabajo en controladores automáticos de dirección de barcos y mostrò como se podría determinar la estabilidad por las ecuaciones diferenciales
En 1932, Nyquist desarrollo un procesamiento simple para determinar la estabilidad de los sistemas de lazo cerrado sobre la base de la respuesta de lazo abierta con excitación sinusoidal en régimen permanente.

Durante la II guerra mundial fue necesario diseñar y construir pilotos automáticos para aeroplanos, sistema de dirección y antenas de radar. Fomentando el interés en los sistemas de control y el desarrollo de nuevos métodos e ideas.
HISTORIA DE LA INGENIERIA DE CONTROL
No obstante, el avance de esta ciencia fue unido con el desarrollo de la electrónica. Antes de 1940, el diseño era un arte comprendido en el procedimiento de ensayo y error, incrementando en 1950 el numero y utilidad de los métodos matemáticos y analíticos, llegando a ser una disciplina completa siendo posible la utilización de los ordenadores analógicos y digitales como componentes de control, proporcionando capacidad de calcular con rapidez y exactitud, que no existían antes para un ingeniero de control
La ingeniería de control esta interesada en el análisis y diseño de sistemas dirigidos hacia un objetivo. La teoría moderna de control esta interesada en sistemas con cualidades de auto-organización, de adaptación y aprendizaje. No cabe duda que en la actualidad, las técnicas de Inteligencia Artificial son las que mas atención están acaparando en el mundo de la Ingeniería en Control. Continúan hoy en día incorporando métodos que se aplican a nuevas ramas del saber “Ingeniería de Sistemas y la Robótica Industrial”

COMPONENTES BASICOS DE UN SISTEMA DE CONTROL
Los componentes básicos de un Sistema de control se puedes denominar:
Objetivos de control Componentes de Sistema de Control Resultados o Salidas
El objetivo de Sistema de Control es controlar las salidas en alguna forma preestablecida mediantes las entradas atreves de los elementos del sistema de control. Un buen sistema debe ser rigurosa la variación de los variantes de los parámetros, pero sensibles a los comandos de entradas
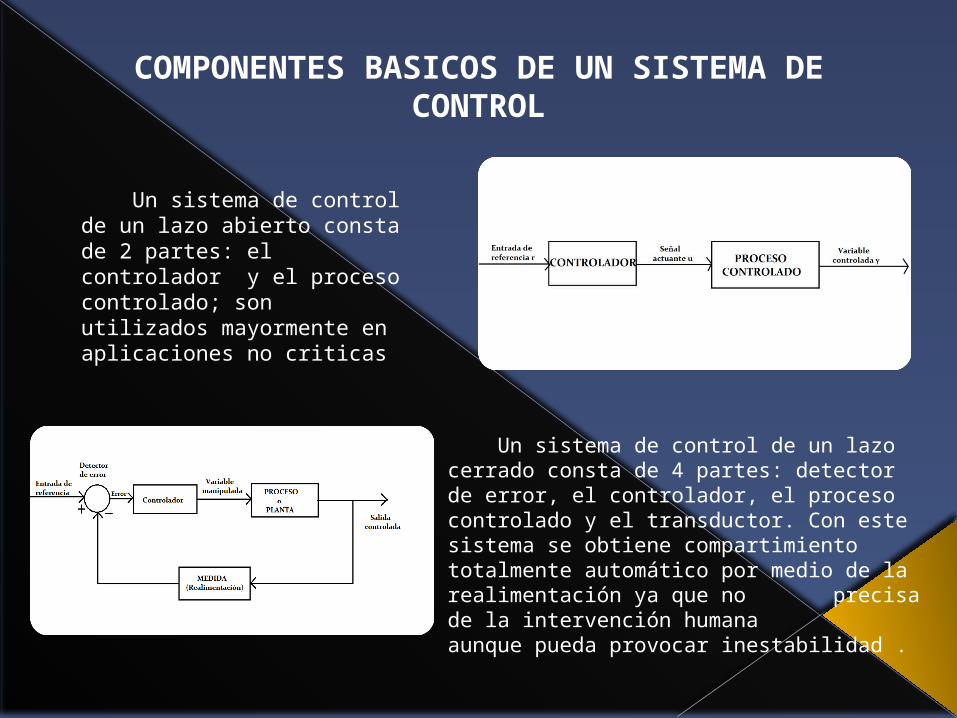
Un sistema de control de un lazo abierto consta de 2 partes: el controlador y el proceso controlado; son utilizados mayormente en aplicaciones no criticas
COMPONENTES BASICOS DE UN SISTEMA DE CONTROL
Un sistema de control de un lazo cerrado consta de 4 partes: detector de error, el controlador, el proceso controlado y el transductor. Con este sistema se obtiene compartimiento totalmente automático por medio de la realimentación ya que no precisa de la intervención humana aunque pueda provocar inestabilidad .
COMPONENTES BASICOS DE UN SISTEMA DE CONTROL
En este sistema existe la realimentación negativa (aquella en la que la señal muestreadas en la salida se resta o compara con la de entrada) y la realimentación positiva en la que la señal realimentada se suma a la de entrada.
•La realimentación puede incrementar la ganancia del sistema en un intervalo de la frecuencia, pero reducirla en otro.
•La estabilidad es una noción que describe si un sistema es capaz de seguir el comando de entrada, o en general, si dicho sistema es útil. En forma rigorosa, un sistema se dice inestable si sus salidas salen de control.
•Con la realimentación se puede estabilizar un sistema inicialmente inestable o puede ser perjudicial sino se aplica adecuadamente.
•La sensibilidad de un sistema puede ser mejorada o perjudicada mediante la realimentación.

TIPOS DE SISTEMAS DE CONTROL
Lo sistemas de control pueden clasificarse de muy distintas maneras según su criterio.
Lazo abierto y lazo cerrado
• Para compara o no, la entrada y salida de un sistema, para controlar esta ultima, el sistema se denomina;
•Sistema de lazo abierto cuando la salida para ser controlada , no se compara con el vapor de la señal de entrada o señal de referencia
•Sistema de lazo cerrado es cuando la salida para ser controlada, se compara con la señal de la frecuencia
La señal de salida que es llevada junto a la señal de entrada, para ser comparada, se denomina señal de feedback o de retroalimentación.

TIPOS DE SISTEMAS DE CONTROL
Si las señales que procesa el sistema están definidas en un intervalo continuo de tiempo (aunque no necesariamente sean funciones continua en el tiempo) el sistema se denomina Sistema en tiempo continuo. Un sistema a tiempo discreto viene caracterizado por magnitudes que varían solo en instantes especifico de tiempo.
Control Continuo y Discreto
Según la ecuación que define este sistema, se denomina:
• lineal, no existen en la practica, por presentar en su mayoría cierto grado de alinealidad en algún punto de su función. Son modelos ideales para simplificar el análisis y diseño.
•No lineales, son mas complejos con respecto a su parte matemática y no existe técnicas generales para resolverlos si no que parte del sistema lineal para simplificar su resultado.
Sistema Lineales y no Lineales
TIPOS DE SISTEMAS DE CONTROL
Sistemas Variantes e Invariantes con el Tiempo
Un sistema es invariante en el tiempo cuando sus parámetros de sistemas de control son estáticos con el tiempo mediante la operación del sistema, mientras que en sistema variante dichos parametros de control fluctuan. En la practica todos los sistemas son variantes en el tiempo.
Aunque un sistema variante en el tiempo sin no linealidades es aun un sistema lineal, el analice y diseño de esta clase de sistemas mucho mas complejo que el de los lineales invariantes con el tiempo

Muchas Gracias..!


















