Prepared by: Long Di Dept. of Electrical and Computer Engineering Utah State University E:...
21
Prepared by: Long Di Dept. of Electrical and Computer Engineering Utah State University E: [email protected] ; T: (435)754-6787 ECE5320 Mechatronics Assignment#01: Literature Survey on Sensors and Actuators Topic: Infrared Sensor 3/10/2010 ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
-
Upload
ambrose-burke -
Category
Documents
-
view
214 -
download
0
Transcript of Prepared by: Long Di Dept. of Electrical and Computer Engineering Utah State University E:...
Prepared by: Long Di
Dept. of Electrical and Computer Engineering
Utah State UniversityE: [email protected] ; T:
(435)754-6787
ECE5320 MechatronicsAssignment#01: Literature Survey on Sensors and Actuators
Topic: Infrared Sensor
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
2
Outline– Reference list– To Explore Further– Major Applications– Basic Working Principle– Typical Sample Configuration in Application– Major Specifications– Advantages– Limitations– Places to Buy– Conclusion
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-2
3
Reference list• “FMA Direct IR Sensor,” URL http://www.revolectrix.com/pic/Co-Pilot
• G. Egan and B. Taylor, “The Use of Infrared Sensors for Absolute Attitude Determination of Unmanned Aerial Vehicles,” Tech.
Rep. MECSE-22-2006, Monash University, Australia, 2006.
• L. Di, H. Chao, and Y. Q. Chen, “A Two-stage Calibration Method for Low-cost UAV Attitude Estimation Using Infrared Sensor”, submitted to 2010 IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications, July 15-17, 2010, Qingdao, ShanDong, China
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-3

4
Reference list• Paparazzi Autopilot_Infrared Sensors URL http://paparazzi.enac.fr/wiki/Infrared_Sensors
• “The Electromagnetic Spectrum,” URL http://science.hq.nasa.gov/kids/imagers/ems/infrared.html.
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-4
5
To Explore Further (survival pointers of web references etc) • http://en.wikipedia.org/wiki/Passive_infrared_sensor • http://trace.wisc.edu/docs/ir_intro/ir_intro.htm• http://www.glolab.com/pirparts/infrared.html• http://kitsrus.com/pdf/k30.pdf • http://www.acroname.com/robotics/info/articles/sharp/
sharp.html
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-5

6
Major applications • Attitude estimation devices (Focus in this assignment)• Augmentative communication devices • Car locking systems • Computers• Emergency response systems • Environmental control systems• Home security systems • Telephones • TVs, VCRs, CD players, stereos • Toys
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-6
7
Major applications Infrared Home Security SystemInstead of being triggered by any motion, the system detects infrared energy. This energy must register as a certain profile in order for the alarm to trigger. That profile of course is one of a human rather than an animal. This enables the infrared system to lower the amount of false alarms while still being triggered before the door or window is damaged.
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-7
8
Major applications Automotive : Body Systems : Window Condensation (Fogging) Sensing and Prediction
In combination with a humidity sensor and Melexis IR sensors, mounted behind the windscreen, can be used to predict the occurrence of a fogging condition prior to fog forming on the glass.
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-8

9
Major applications Distance measurement (Sharp IR sensor) A pulse of IR light is emitted by the emitter. This light travels out in the field of view and either hits an object or just keeps on going. In the case of no object, the light is never reflected and the reading shows no object. If the light reflects off an object, it returns to the detector and creates a triangle between the point of reflection, the emitter, and the detector. The angles in this triangle vary based on the distance to the object. The receiver portion of these new detectors is actually a precision lens that transmits the reflected light onto various portions of the enclosed linear CCD array based on the angle of the triangle described above. The CCD array can then determine what angle the reflected light came back at and therefore, it can calculate the distance to the object.
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-9

10
Basic Working Principle(1) Infrared radiation exists in the electromagnetic spectrum at a wavelength that is longer than visible light. It cannot be seen but it can be detected. Objects that generate heat also generate infrared radiation and those objects include animals and the human body whose radiation is strongest at a wavelength of 9.4um. Infrared in this range will not pass through many types of material that pass visible light such as ordinary window glass and plastic. However it will pass through, with some attenuation, material that is opaque to visible light such as germanium and silicon. An unprocessed silicon wafer makes a good IR window in a weatherproof enclosure for outdoor use. It also provides additional filtering for light in the visible range.
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-10

11
Basic Working Principle (2) Most IR sensors consist of two to four pixels of equal areas made by photosensitive material. It measures the infrared radiation of objects based on their temperature from its field of view.
Sensor FOV +/- Do
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-11

12
Basic Working Principle (3) Then the radiation goes into the front of the sensor faces and through the photoelectric effect, the nature of the photosensitive material gets changed. This directly changes the current or voltage in the internal sensor circuit.
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-12

13
Typical Sample Configuration in Application (1)
• Attitude estimation of unmanned aerial vehicles (UAVs)• The paparazzi autopilot uses infrared thermopiles for primary attitude
sensing.
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-13
14
Typical Sample Configuration in Application (2)
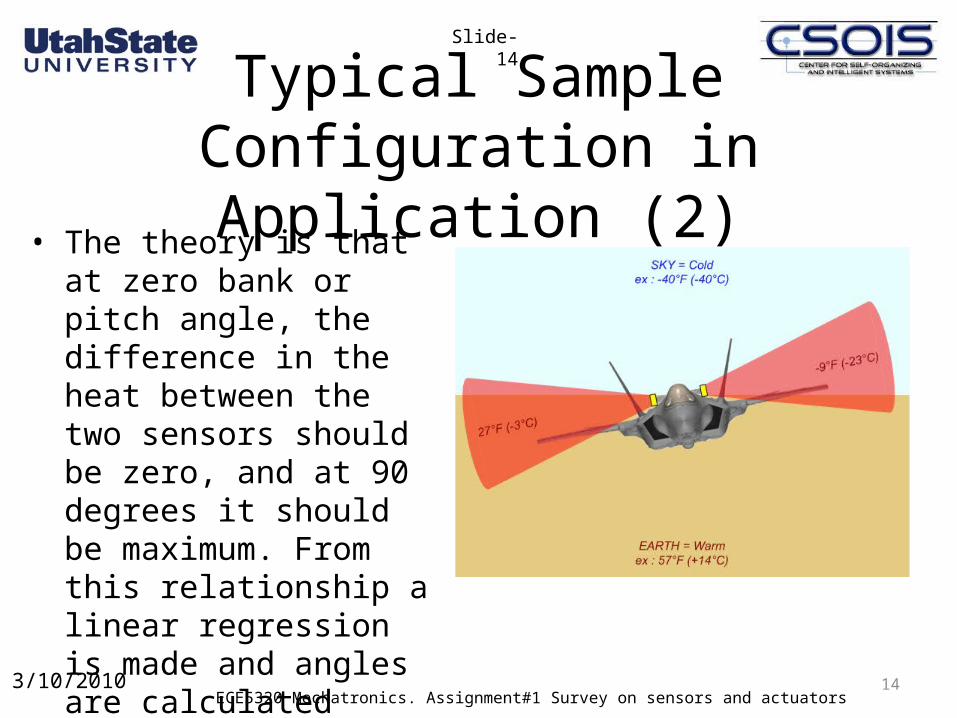
• The theory is that at zero bank or pitch angle, the difference in the heat between the two sensors should be zero, and at 90 degrees it should be maximum. From this relationship a linear regression is made and angles are calculated during flight.
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-14

15
Typical Sample Configuration in Application (3)
• Each pair of sensors measures one axis, a minimum of 2 pairs must be used to measure pitch and roll but best results are obtained thru the use of a 3rd pair on the vertical axis. Since the output signal from each sensor pair is proportional to both the attitude and the weather/terrain, systems with only x-y sensors require a ground calibration and may not provide accurate angle calculations as the aircraft travels over terrain with different IR radiation.
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-15
16
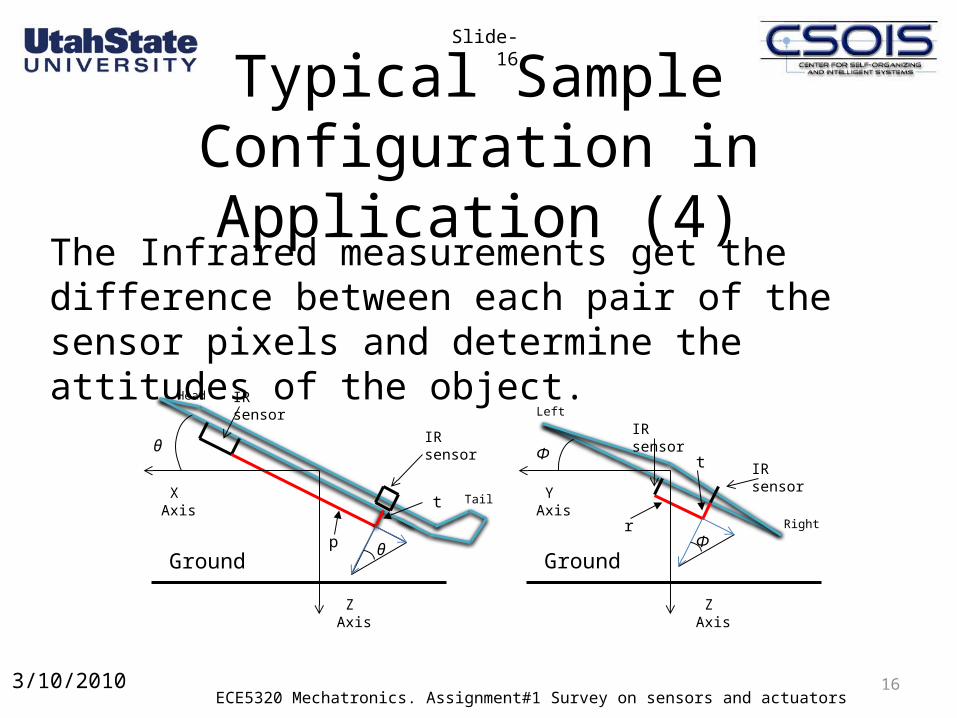
The Infrared measurements get the difference between each pair of the sensor pixels and determine the attitudes of the object.
Groundp
t
IR sensor
IR sensor
θ
Z Axis
X Axis
θ
Left
Right
IR sensor
IR sensor
Z Axis
Y Axis
Φ
Φ
t
r
Ground
Head
Tail
Typical Sample Configuration in Application (4)
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-16

17
Major Specifications
Specification Parameters
Weight 0.39oz
Vibration 200G max
Operating Current <10 milliamps
Operating Voltage +3 to +9 volts DC
Sensing Element photosensitive material
Updating Frequency 60 Hz
Power Consumption 30 mW
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-17
18
Advantages • Low power requirements: therefore ideal for laptops,
telephones, personal digital assistants • Low circuitry costs• Simple circuitry: no special or proprietary hardware is required,
can be incorporated into the integrated circuit of a product • Higher security: directionality of the beam helps ensure that
data isn't leaked or spilled to nearby devices as it's transmitted • Portable • Few international regulatory constraints: IrDA (Infrared Data
Association) functional devices will ideally be usable by international travelers, no matter where they may be
• High noise immunity: not as likely to have interference from signals from other devices
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-18

19
Limitations • Line of sight: transmitters and receivers must be
almost directly aligned (i.e. able to see each other) to communicate
• Blocked by common materials: people, walls, plants, etc. can block transmission
• Short range: performance drops off with longer distances
• Light, weather sensitive: direct sunlight, rain, fog, dust, pollution can affect transmission
• Speed: data rate transmission is lower than typical wired transmission
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-19
20
Places to Buy
• http://www.fmadirect.com/detail.htm?item=1778§ion=20
• http://www.melexis.com/Sensor_ICs_Infrared_and_Optical/Infrared_Thermometers/Infrared_Sensor_IC_19.aspx Piezocryst -
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-20
21
Conclusion
Infrared Sensors have some many advantages (small size, low power consumption, etc.) They also have several limitations(temperature, line of sight, etc.) They have been widely used on unmanned aerial vehicle (UAVs) related project for attitude estimations for their low cost and acceptable accuracy features.
3/10/2010ECE5320 Mechatronics. Assignment#1 Survey on sensors and actuators
Slide-21