
Precise Point Positioning (PPP) Technique versus Network …€¦ · · 2016-05-27Precise Point...
31
Precise Point Positioning (PPP) Technique versus Network-RTK GNSS Reha M. Alkan 1,2 , İ.M. Ozulu 1 and V. İlçi 1 1 Hitit University, Çorum, Turkey 2 Istanbul Technical University, Istanbul, Turkey
Transcript of Precise Point Positioning (PPP) Technique versus Network …€¦ · · 2016-05-27Precise Point...
Precise Point Positioning
(PPP) Technique versus
Network-RTK GNSS
Reha M. Alkan1,2, İ.M. Ozulu1 and V. İlçi1
1 Hitit University, Çorum, Turkey2 Istanbul Technical University, Istanbul, Turkey

Introduction
Motivation
Aplication - Kinematic Test
Evaluation of the Measurements
Conclusion

Major developments in the world of informatics have led to the
development of different solutions with various algorithms, and
major changes in numerous professional fields as well as in
satellite-based positioning.
Introduction

Although; in the 1990’s, it was necessary to obtain
positioning with Global Positioning Systems (GPS) using at
least two receivers; nowadays an accuracy of within a
centimetre level of positioning has become possible using a
single receiver data with advanced techniques.

One of which is Network-RTK used extensively in the world,
producing economical and rapid solutions for the users
7/24/365.

According to the results obtained the Network-RTK has been
used quite widely all over the world due to it many advantages
like;
- accurate and fast positioning,
- easily be used by one person,
- cost-effective.

On the other hand, it has some restrictions and this limits its
usage in some cases and remote places.
The most important restriction is; this technique, similar to
all of the differential techniques, needs additional data, i.e.
correction, from at least one reference station and the
distance between the rover and its reference station is not un-
limited (should be about 50-100 km).

TUSAGA-AKTIF Reference Stations in TURKEY
The network consists of 146
reference stations with an average
spacing of 70-100 km covering the
entire country.
provides few cm-level of accuracy even
in a couple of seconds, fast, easy and
cost-effectively, 365/24/7 in real-time.

Over the past decade, researchers have made studies to
develop more economical, convenient, reliable, and worldwide
precise positioning solutions, which do not have the
disadvantages that exist in the conventional differential
GNSS techniques, including CORS-like.
In this frame, one of the commonly used methods is Precise
Point Positioning (PPP).

PPP provides positioning without the need for a reference station
using a stand-alone GNSS receiver by using precise satellite
orbit and clock corrections.
With this method, it
has become possible
to reach a cm to dm
level of positional
accuracy in the static
or kinematic mode.

The user of this method can obtain his/her position;
within a global reference frame,
anywhere in the world easily,
economically,
without any need of a base station data
offers great operational flexibility.

The use of PPP has been increased, but it has some drawbacks
including necessity of long occupation time for converge and
unavailability of PPP processing mode in common commercial
GPS processing software.
Especially long convergence time is limited its use in many
situations where rapid GPS surveying is required and surveying
efficiency is concerned.

There is a number of software packages to estimate PPP-
derived coordinates, i.e.,
- individuals at universities or research organizations,
- scientific GPS processing software and,
- in recent years, web-based on-line processing
services.

The use of the processing services has become widely popular
because of their ease of use, being free of charge (or requiring low
cost fee) and no requirement of a license and knowledge of a GPS
processing software.
In these services, users can
upload/send their GPS
observation file(s) which will
be processed automatically
and estimate the coordinates (or trajectory).

In this study Canadian Spatial Reference System-Precise
Point Positioning Service (CSRS-PPP) operated by Geodetic
Survey Division of Natural Resources Canada (NRCan) online
service was used to obtain PPP-derived coordinates.
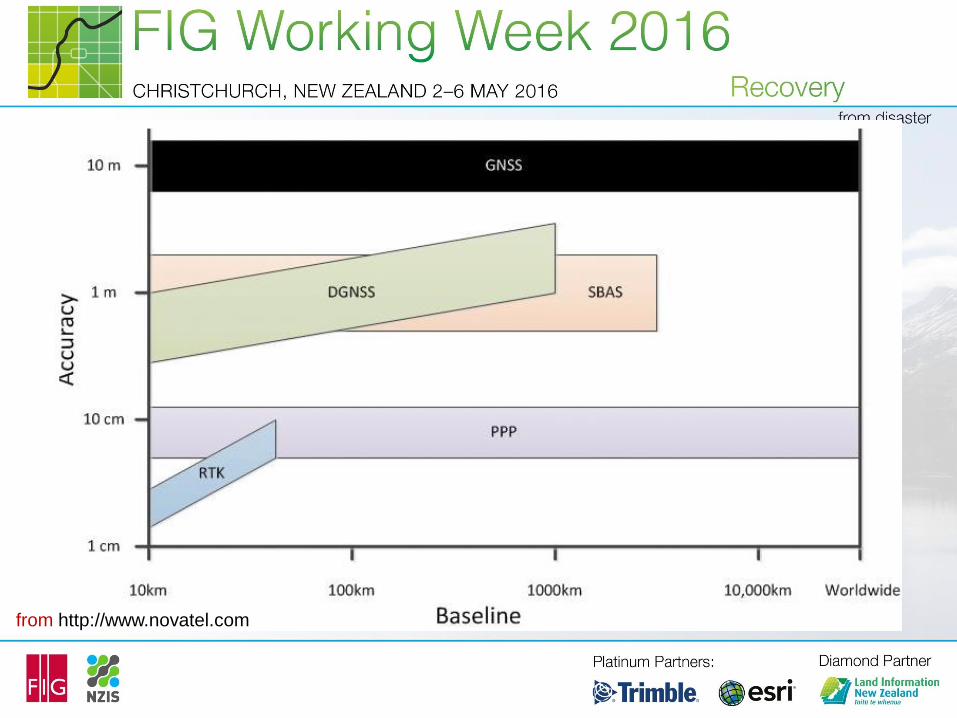
from http://www.novatel.com

In this study, we aim to make an accuracy comparison of
the Network-RTK and the PPP techniques in a dynamic
environment.

Aplication - Kinematic Test
In order to compare the TUSAGA-Aktif Service and PPP
technique in terms of accuracy in a dynamic environment, a
kinematic test was conducted at the Obruk Lake Dam, in
Çorum, Turkey in October of 2015.
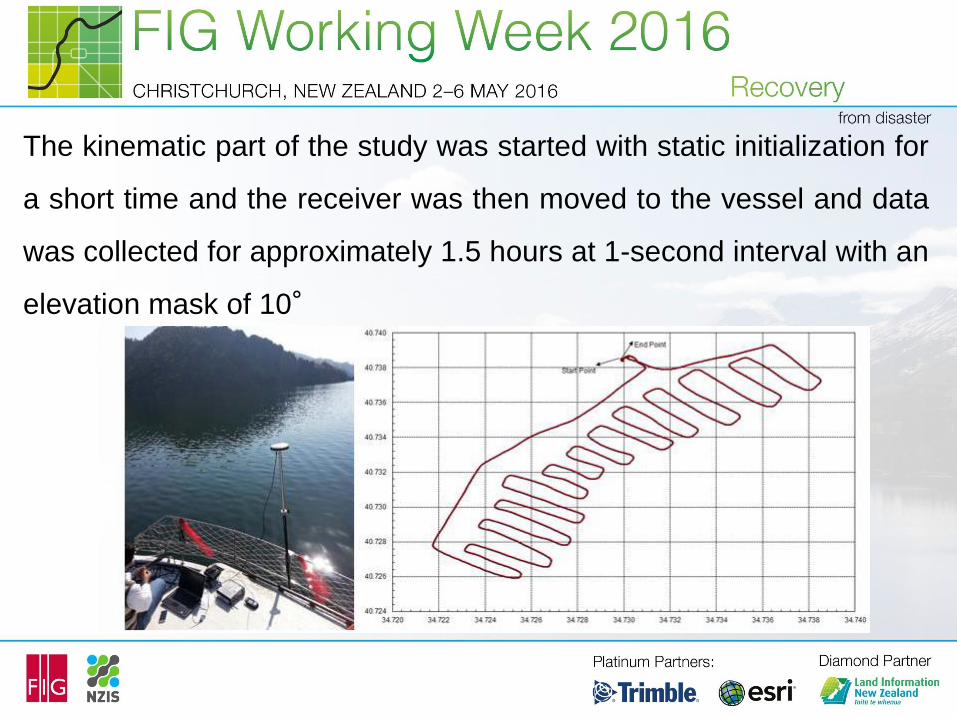
The kinematic part of the study was started with static initialization for
a short time and the receiver was then moved to the vessel and data
was collected for approximately 1.5 hours at 1-second interval with an
elevation mask of 10°

While the kinematic test was lasting, another receiver was
occupied on a known point at the shore and GPS data was
collected in static mode.
The precise coordinates (or reference trajectory) of the
vessel for each epoch with the differential (relative) GNSS
method using both the GNSS data collected to the vessel
and at the reference station on the shore.

In this test study, ProFlex 500 GNSS receivers with
geodetic–grade antenna was used.
ProFlex 500 is a 75 channel (GPS L1 C/A L1/L2 P-code,
L2C, L1/L2; GLONASS L1 C/A, L2 C/A code, L1/L2) receiver
with having up to 20 Hz of raw data and position output.

While the kinematic measurement was lasting, the Network-
RTK coordinates were recorded simultaneously for each
measurement epoch in real-time from the nearest TUSAGA-
Aktif Network’s point.

The collected data from the vessel was sent to the CSRS-
PPP service the day after the data collection date, using the
service’s interactive web page by choosing the kinematic
processing option.
The kinematic PPP coordinates for each measurement epoch
with solution reports were retrieved a short time later via e-
mail from the service.
Evaluation of the Measurements

The coordinates of the vessel determined with the TUSAGA-
Aktif Network and NRCan’s CSRS-PPP online service were
compared with those of differential solution of the LGO
software, i.e. to the reference coordinates, epoch-by-epoch.

Differences between Known-coordinates (Differential Solution) and NRCan’s CSRS-PPP &
TUSAGA-Aktif Network
blue line; CSRS-PPP, red line: CORS or TUSAGA-Aktif Network

Statistical Comparison of the Results

The results of the test measurement show that,
the Network-RTK provides a cm level of accuracy when the
solution can be fixed. Otherwise, the accuracy decreases
dramatically to even a meter-level of accuracy if the
float/DGPS solution occurs due to problems in the
communication link, outside the coverage area of the GSM
network or where the absence of data transmission is poor.
Conclusions and Results

Concerning the PPP technique, the kinematic test results
showed that the PPP-derived coordinates converge to the
relative solutions with a couple of cm-level of accuracy. This
accuracy has allowed the technique to be a viable
alternative to conventional differential GNSS techniques in
terms of accuracy, easy-use and cost-effectiveness while
reducing labour and equipment costs.
Conclusions and Results

Although Network-RTK offers many advantages over
conventional differential GNSS techniques, PPP techniques
needs a single receiver and this removes the necessity for
the base (reference) station(s) or data from the CORS-like
networks. Thus PPP is still useful in areas that are not
covered by CORS infrastructure due to low population
density, economic reasons, or operational constrains.
Conclusions and Results

Hoping to see you in İstanbul for FIG 2018

Thank you very much for your
interest and attention…
Contributions, Questions???
Prof.Dr. Reha Metin ALKAN
Hitit University, Corum, Turkey & Istanbul Technical University, Istanbul, Turkey


















