practica de dinamica - cristiancastrop.files.wordpress.com · universidad nacional de san...
16
UNIVERSIDAD NACIONAL DE SAN CRISTÓBAL DE HUAMANGA __________________________________ FACULTAD DE INGENIERÍA DE MINAS, GEOLOGÍA Y CIVIL ESCUELA DE FORMACION PROFESIONAL DE INGENIERIA CIVIL EJERCICIOS RESUELTOS DE “CINEMÁTICA, DE PARTICULAS Y CUERPO RIGIDO”, DE AUGUSTO VASQUEZ VERA CURSO : DINAMICA ALUMNOS : IRCAÑAUPA HUARCAYA, Wilmer : JANAMPA QUISPE, Juan Carlos : QUISPE MENESES, Linda Estrella : SANTANA ARRIETA, Hebber DOCENTE : Ing. CRISTIAN CASTRO PEREZ FECHA DE ENTREGA : 08/04/2013 AYACUCHO – PERÚ
Transcript of practica de dinamica - cristiancastrop.files.wordpress.com · universidad nacional de san...

UNIVERSIDAD NACIONAL DE SAN CRISTÓBAL DE HUAMANGA
__________________________________ FACULTAD DE INGENIERÍA DE MINAS, GEOLOGÍA Y
CIVIL
ESCUELA DE FORMACION PROFESIONAL DE INGENIERIA CIVIL
EJERCICIOS RESUELTOS DE “CINEMÁTICA, DE PARTICULAS Y CUERPO RIGIDO”, DE AUGUSTO VASQUEZ VERA
CURSO : DINAMICA ALUMNOS : IRCAÑAUPA HUARCAYA, Wilmer
: JANAMPA QUISPE, Juan Carlos : QUISPE MENESES, Linda Estrella : SANTANA ARRIETA, Hebber
DOCENTE : Ing. CRISTIAN CASTRO PEREZ FECHA DE ENTREGA : 08/04/2013
AYACUCHO – PERÚ

1.4. Dos móviles comienzan simultáneamente sus movimientos partiendo del
punto A, con una velocidad de V0 =90 Km/h. Uno de los móviles recorre el diámetro AB=20m =2r con movimiento uniforme retardado. El otro recorre el semiperimetro de la circunferencia con una aceleración tangencial del mismo modulo que la desaceleración del anterior. Ambos móviles llegan a B en el mismo instante, calcular:
1. El tiempo de los recorridos 2. El modulo de la desaceleración 3. Las componentes intrínsecas de la aceleración total del segundo móvil en el
punto B y el ángulo que forma con la velocidad en el mismo punto.
1. e = 2r; e = r e = V − 2r = V − 12
2r = V − A 2r B V = 90 / = 25 / = − − − −− C = = + − − − −
SUMANDO MIEMBRO A MIENBRO (A) y (B) ( + 2) = 50 = ( + ) = ( + )
2. T EN A 2 = 25 ( + 2)50 − 12 ( ( + 2)50 ) 2 = ( + 2)2 − 12 ( + 2)2500 ( + 2) − 4 = ( + 2)2500 ( + 2)2500 = ( + 2) − 4 = − 2 = ( − )( + ) = ( − )( + ) − − − −

3. COORDENADAS INTRINSECAS a = V = V + V = 25 + 4 25 4( − 2)( + 2)
= − = ( − )
PARA 2r=20m r=10m ; ( ) a = 2500( − 2)10( + 2)
= ( − )( + ) tan θ = a a θ = arctg a a θ = 55.50673.70 = . ° 1.10 El vector posicion de una particula que se mueve a lo largo de una curva en el espacio, esta dado por: = √ − + ̂ + Para el intervalo 0 1 Usaremos la siguiente relación para la transformación de coordenadas rectangulares a cilíndricas. Como: ̅ = + ̂ + = cos ∅= sin ∅=
Solución: = 5 1 − = 5 = 3 Además: = +

= 5 1 − + (5 ) = 5 Luego: = cos ∅ = sin ∅ 5 √1 − = 5 cos ∅ 5 = 5 sin ∅ cos ∅ = √1 − sin ∅ = Derivando:cos ∅ = √1 − cos ∅∅ = 1 ∅ = 1√1 − Describiendo el movimiento en coordenadas cilíndricas: ( , ∅, ) = 5 ∅ = = 3 = 10 ∅ = 1√1 −
= 6
= 10 ∅ = √1 −− 2 + 1 = 6
Luego tenemos en coordenadas cilíndricas:Analizando el movimiento para: =
Posición: ̅ = ̂ + ̂ ̅ = 5 ̂ + 3 ̂ ̅ = 5 ̂ + 3 ̂ ̅ = 1.25 ̂ + 0.75 ̂ Velocidad: ̅ = ̂ + ∅ ̂∅ + ̂ ̅ = 10 ̂ + 5 √ ̂∅ + 6 ̂ ̅ = 10 ̂ + 5 ̂∅ + 6 ̂ ̅ = 5 ̂ + 1.443 ̂∅ + 3 ̂
Aceleración: = ( − ∅ ) ̂ + ( ∅ + 2 ∅) ̂∅ + ̂ = (10 − ) ̂ + ( √ ( ) + √ ) ̂∅ + 6 ̂

= (10 − ) ̂ + + ̂∅ + 6 ̂ = ( ) ̂ + ( √ ( ) + √ ) ̂∅ + 6 ̂
= 8.333 ̂ + 12.509 ̂∅ + 6 ̂ 1.11 El vector posición de una partícula que se mueve a lo largo de una curva en el espacio, está dado por: = 5 cos ∅ ̂ + 5 sin ∅ ̂ + 3 ( ) Donde: ∅ = Describir el movimiento en coordenadas cilíndricas cuando la velocidad axial es de 36 / Cuál es el movimiento cuando la componente transversal de la aceleración es de 45∅ / Solución: Como: ̅ = + ̂ + = cos ∅= sin ∅=
Comparando: = 5 cos ∅ = 5 sin ∅ = 3 Donde: = 5 = 5 ∅ = = 3 = 10 ∅ = 2
= 9 = 10 ∅ = 2 = 18
Cuando la velocidad axial es: 36 = = 9 Hallamos: 36 = 9 donde: = 2 Posición:̅ = ̂ + ̂ ̅ = 5 ̂ + 3 ̂ ̅ = 5(2) ̂ + 3(2) ̂ ̅ = 20 ̂ + 24 ̂ Velocidad: ̅ = ̂ + ∅ ̂∅ + ̂ ̅ = 10 ̂ + 5 (2 ) ̂∅ + 9 ̂ ̅ = 10(2) ̂ + 5(2) (2(2) ) ̂∅ + 9(2) ̂ ̅ = 20 ̂ + 80 ̂∅ + 36 ̂ ̅ = 20 ̂ + 251.327 ̂∅ + 36 ̂

Aceleración: = ( − ∅ ) ̂ + ( ∅ + 2 ∅) ̂∅ + ̂ = (10 − 5 (2 ) ) ̂ + (5 (2 ) + 2(10 )2 ) ̂∅ + 18 ̂ = (10 − 5(2) 2 (2) ) ̂ + (5(2) (2 ) + 2(10(2))2 (2)) ̂∅ + 18(2) ̂ = (10 − 320 ) ̂ + (200 ) ̂∅ + 36 ̂ = −3148.273 ̂ + 628.319 ̂∅ + 36 ̂ Cuál es el movimiento cuando la componente transversal de la aceleración es de 45∅ / Componente transversal de la aceleración es: 450 = ∅ = (5 (2 ) + 2(10 )2 ) Hallemos el valor de : 450 = (5 (2 ) + 2(10 )2 ) 450 = 10 + 40 450 = 50 = 3 Cuando la componente transversal de la aceleración es 45∅ / esto se da para un = 3 Reemplazando. Posición: ̅ = ̂ + ̂ ̅ = 5 ̂ + 3 ̂ ̅ = 5(3) ̂ + 3(3) ̂ ̅ = 45 ̂ + 81 ̂ Velocidad: ̅ = ̂ + ∅ ̂∅ + ̂ ̅ = 10 ̂ + 5 (2 ) ̂∅ + 9 ̂ ̅ = 10(3) ̂ + 5(3) (2(3) ) ̂∅ + 9(3) ̂ ̅ = 30 ̂ + 270 ̂∅ + 81 ̂ Aceleración: = ( − ∅ ) ̂ + ( ∅ + 2 ∅) ̂∅ + ̂ = (10 − 5 (2 ) ) ̂ + (5 (2 ) + 2(10 )2 ) ̂∅ + 18 ̂ = (10 − 5(3) 2 (3) ) ̂ + (5(3) (2 ) + 2(10(3))2 (3)) ̂∅ + 18(3) ̂ = (10 − 1620 ) ̂ + 450 ̂∅ + 54 ̂

1.15. La velocidad de una partícula que tiene movimiento rectilíneo a lo largo del eje Z está dada por V = KZ K= cte. Para t=0 y Z=5 .Encontrar el desplazamiento , la velocidad y la aceleración de la partícula como funciones del tiempo.
V=KZ ; para t=0 z=5
V=dzdt
vdt= dz integrando
dz kdtz
Ln z =kt+c
*kt c kt cz e e e ………(1) Según la condición para t=o ,z =5
* 5 1* 5kt c c cz e e e e
* Luego el desplazamiento 5 .ktz e Rpta
*La velocidad 5 .ktv kz v ke Rpta
*Aceleracion a=5 ktk e
25 .kta k e Rpta 1.23 La barra AB mostrada en la figura tiene una rotación angular constante de / y está avanzando hacia arriba a lo largo del eje del perno a una velocidad constante de / Exprese la velocidad y aceleración del punto A situado sobre la barra en términos de la componentes cilíndricas.
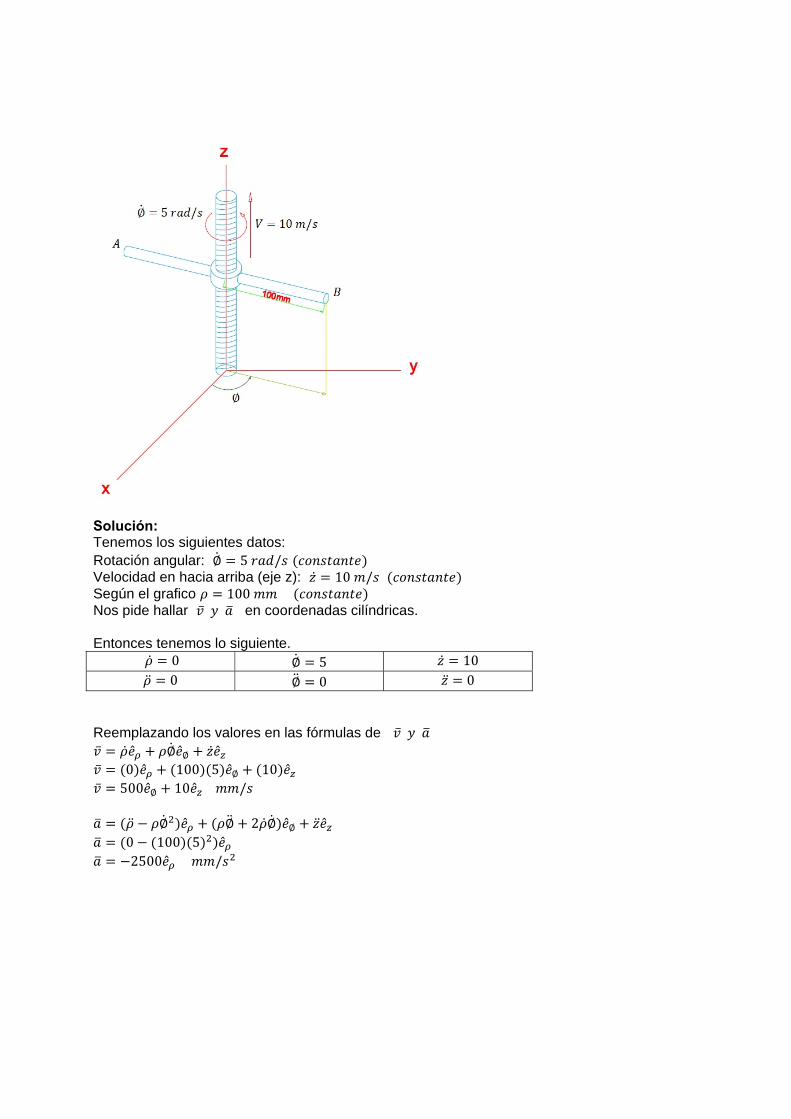
Solución: Tenemos los siguientes datos: Rotación angular: ∅ = 5 / ( ) Velocidad en hacia arriba (eje z): = 10 / ( ) Según el grafico = 100 ( ) Nos pide hallar ̅ en coordenadas cilíndricas. Entonces tenemos lo siguiente. = 0 ∅ = 5 = 10 = 0 ∅ = 0 = 0 Reemplazando los valores en las fórmulas de ̅ ̅ = ̂ + ∅ ̂∅ + ̂ ̅ = (0) ̂ + (100)(5) ̂∅ + (10) ̂ ̅ = 500 ̂∅ + 10 ̂ / = ( − ∅ ) ̂ + ( ∅ + 2 ∅) ̂∅ + ̂ = (0 − (100)(5) ) ̂ = −2500 ̂ /

1.27. Una partícula se mueve con una velocidad relativa constante V0 a lo largo de la periferia de un tubo de forma elíptica siendo a y b los semiejes mayor y menor respectivamente, mientras el tubo esta girando con una velocidad angular constante (∩) alrededor del eje menor, como se indica en la fig. determinar la velocidad y la aceleración de la partícula en la posición indicada.
USANDO LA FORMULA DE LA VELOCIDAD = + × −−− − DONDE δ = ̂ =∩ ̂δ = X ̂ + Y ̂ W× δ =∩ ̂ × (X ̂ + Y ̂) = − ∩× HALLANDO UNITARIO ∪ SE PARAMETRIZA LA ELIPSE EN FUNCION DE T = (acosT, bsenT) X = acosT; Y = bsenT cosT = Xa ; senT = Yb = (− , ) = (− , ̂) ∪ = (− aYb , bXa ̂)Yb + b Xa − − −
∪=∪= (− + ̂)( + )
REMPLAZANDO EN LA FORMULA (1) = V (−a Y + X ̂)(a Y + ) −∩×
= + × + × − − − −( )

IDENTIFICAR CADA TERMINO δ = − ∩ ̂ W =∩ ̂δ = X ̂ + Y ̂ = ∪= (− + ̂)( + )
REMPLAZANDO EN LA FROMULA (2) = δ + × δ + 2 × δ = − ∩ × ̂ +∩ ̂(∩ ̂ × (X ̂ + Y ̂)) + 2 ∩ ̂ × V (−a Y + X ̂)(a Y + )
= − ∩ × ̂ +∩ ̂(− ∩ ) + 2 ∩ V a Y(a Y + )
= − ∩ × ̂ −∩ ̂ + 2 ∩ V a Y (a Y + )
= − ∩ ̂ + ∩ ( + )
3.5. Hallar la velocidad angular de BC para la posición que se muestra . La velocidad angular de la volante es de 170s
/ 20 70A Or j w w
/* A OA O OAV V W r

70 * 1400OAAV k r i
/ 105 ;B A ABr i w k
/* B AB A ABV V w r
1400 105B ABV i w j
1400 *105B ABV i w i
…………………………(1)
/ 15 20 ;C B BCBCr i j w w k
/* C BC B BCV V w r
*(15 20 )B BCV w i j
15 20B BC BCV w j w i
……………………(2)
Igualando 1 y 2 1
1
1
1400 20 70
105 15 10
70 .
BCBC
AB BC AB
BC
i w w ksw w w ks
w ks Rpta
3.7. El cono de la figura rueda en el plano XZ, manteniendo su vértice en el eje de coordenadas; designando por W, la velocidad angular constante del eje OB del cono
alrededor de Y. Calcular: a) La velocidad angular de rotación del cono alrededor del eje OB (spin) b) La velocidad anular total del cono. c) La aceleración angular del cono.
Solución: En el plano XY: = . = . . ̂ + . ̂= . ( . . ̂ + . ̂) = . ( . . ̂ + . ̂)

a). Del gráfico vemos que: = . = . = . = . Derivando ambas expresiones con respecto al tiempo: ( . ) = ( . ) = = =
b). Luego, para la velocidad angular del sistema: = + = +
= +
= +
= (1 + ) = 1 +
= 1 +
Para la aceleración angular:
=
Derivamos otra vez con respecto al tiempo: ( ) = = =
Sabemos que: = → = 0 → = 0
Por tanto, = + = 0
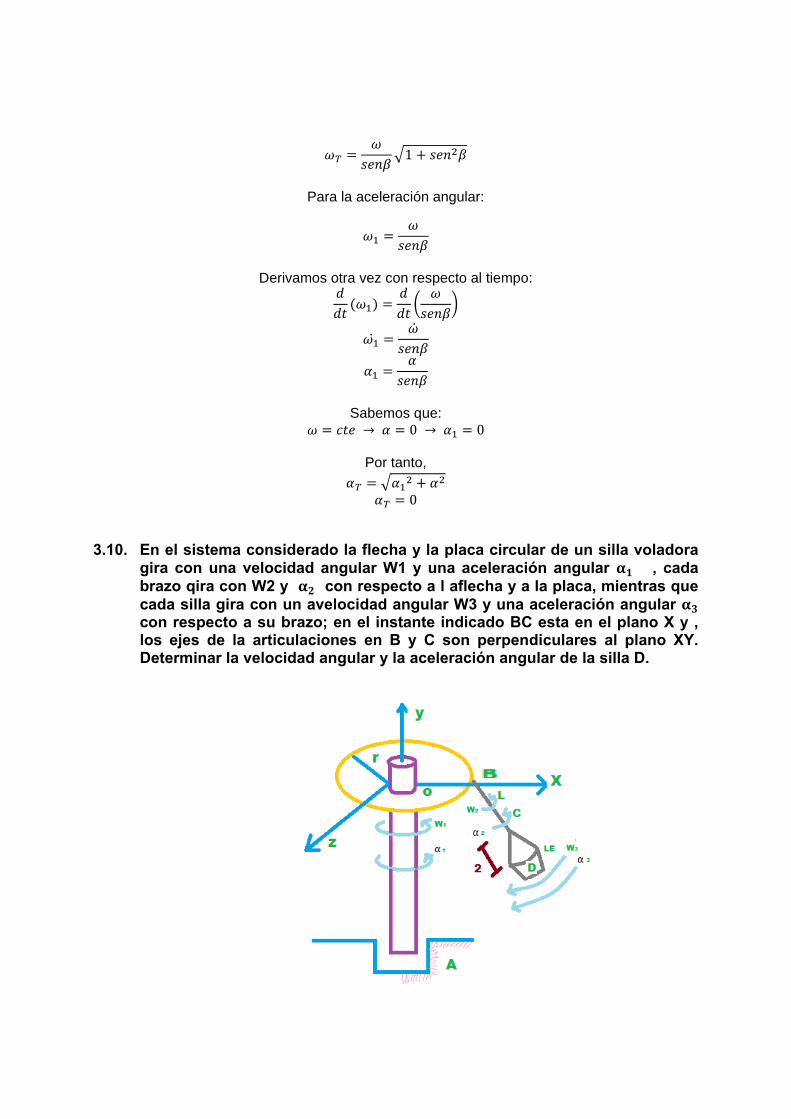
3.10. En el sistema considerado la flecha y la placa circular de un silla voladora
gira con una velocidad angular W1 y una aceleración angular , cada brazo qira con W2 y con respecto a l aflecha y a la placa, mientras que cada silla gira con un avelocidad angular W3 y una aceleración angular con respecto a su brazo; en el instante indicado BC esta en el plano X y , los ejes de la articulaciones en B y C son perpendiculares al plano XY. Determinar la velocidad angular y la aceleración angular de la silla D.

= + − = ̂ + − = ̂ + ( − ) ACELERACION: UTILIZANDO LA FORMULA ( ) : ( ) +∩× ( ) : Representaladireccion respectoalsistemafijo ( ) : Representalaaceleracionangularrespectoalsistemamovilrotatorio ∩× ∶ 0 . = + − +∩× ∩∶ α = α ̂ + α − α + (W ̂) × (W − ) α = α ̂ + (α − α ) +W W ̂ −W ̂= ̂ + ( − ) + ( − ) ̂ 3.15. Cuando el mecanismo biela-manivela se halla en la posición indicada la corredera C tiene una velocidad hacia debajo de 4.8 m/s. determine la velocidad del punto medio M de la barra BC y la velocidad angular de AB.
Solución: Hallamos la velocidad de B, respecto al sistema móvil A y al sistema fijo también A: V = V + ω xρ V = ω xρ V = (ω . k)x(0.6cosφ. ı̂ − 0.6senφ. ȷ)̂

V = 0.6ω cosφ kxı̂ − 0.6ω senφ kxȷ̂ V = 0.6ω cosφȷ̂ + 0.6ω senφı̂ V = (0.6ω cosφ) + (0.6ω senφ) V = 0.6ω …… (1) Luego hallamos la velocidad de C, respecto al sistema móvil B y sistema fijo A: V = V + ω xρ V = V + (ω . k)x(−1.2ı̂ − 0.9ȷ)̂ V = V − 1.2ω kxı̂ − 0.9ω kxȷ̂ V = V − 1.2ω ȷ̂ + 0.9ω ı̂ Despejando V y reemplazando con V = −4.8ȷ ̂ V = −4.8ȷ̂ + 1.2ω ȷ̂ − 0.9ω ı̂ V = −0.9ω ı̂ + (1.2ω − 4.8)ȷ ̂…… (2) Veamos en el gráfico, en la barra BC, se sabe que: V = R .ω V = 1.5ω 4.81.5 = ω ω = 3.2 …… (3) Reemplazamos (3) en (2): V = −0.9ω ı̂ + (1.2ω − 4.8)ȷ ̂V = −0.9(3.2)ı̂ + (1.2(3.2) − 4.8)ȷ ̂V = −2.88ı̂ − 0.96ȷ ̂V = (−2.88) + (−0.96) V = 3.0357m/s …… (4)
Finalmente reemplazamos (4) en (1): V = 0.6ω 3.0357 = 0.6ω ω = 5.0595rad/s ω ≈ 5rad/s Ahora, para V , tomamos como sistema fijo a A y sistema móvil a M, para el punto C: V = V + ω xρ V = V + (ω . k)x(−0.6ı̂ − 0.45ȷ)̂ V = V + −0.6ω kxı̂ − 0.45ω (kxȷ)̂ V = V + −0.6ω . ȷ̂ + 0.45ω . ı̂
Despejamos V y reemplazamos el valor de V = −4.8ȷ:̂ V = −4.8ȷ̂ + 0.6ω . ȷ̂ − 0.45ω . ı̂ V = (−0.45ω )ı̂ + (0.6ω − 4.8)ȷ ̂V = (−0.45ω ) + (0.6ω − 4.8) V = (−0.45ω ) + (0.6ω − 4.8) …… (5) Se sabe que: ω = ω , ω = ω ω = Vd ω = 3.03571.5 ω = 2.0238 …… (6) Finalmente, reemplazamos (6) en (5): V = (−0.45ω ) + (0.6ω − 4.8) V = (−0.45(2.0238)) + (0.6(2.0238) − 4.8) V = 3.699 V ≈ 3.7m/s