
Pozicija – zasuk (kot) - lrtme.fe.uni-lj.silrtme.fe.uni-lj.si/lrtme/slo/UNIVSS/meri_pret/seminar...
20
Pozicija – zasuk (kot) Inkrementalni dajalniki Seminarska naloga pri predmetu Merilni pretvorniki Študent: Samir Bajrić Mentor: doc. dr. Peter Zajec Ljubljana, maj 2011
-
Upload
truongtuyen -
Category
Documents
-
view
225 -
download
1
Transcript of Pozicija – zasuk (kot) - lrtme.fe.uni-lj.silrtme.fe.uni-lj.si/lrtme/slo/UNIVSS/meri_pret/seminar...
Pozicija – zasuk (kot)
Inkrementalni dajalniki
Seminarska naloga pri predmetu Merilni pretvorniki
Študent: Samir Bajrić
Mentor: doc. dr. Peter Zajec
Ljubljana, maj 2011

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
2
Kazalo:
stran:
1. UVOD……………………………………………………………………………………………………………… 2
2. DELOVANJE INKREMENTALNEGA DAJALNIKA……………………………………………….. 4 2.1 PRIMER UPORABE INKREMENTALNEGA DAJALNIKA………………………………….. 9
3. MOIREJEV VZOREC………………………………………………………………………………………… 10
4. OPTIČNI DAJALNIK…………………………………………………………………………………………. 14 4.1 MERILNE LETVE OPTIČNIH DAJALNIKOV……………………………………………………….. 15
5. MAGNETNI DAJALNIK……………………………………………………………………………………. 17 5.1 LASNTOSTI OBROČASTEGA DAJALNIKA………………………………………………………… 18
6. PRIMERJAVA INKREMENTALNEGA IN ABSOLUTNEGA DAJALNIKA………………. 19
7. LITERATURA…………………………………………………………………………………………………… 20

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
3
1. Uvod
Dajalnik položaja je naprava, ki zazna fizikalno spremembo, ki se pojavi pri premiku ali zasuku, ter jo prevede v analogni ali digitalni električni signal. Delimo jih na dajalnike pomika ali linearne dajalnike in dajalnike zasuka ali rotacijske dajalnike. Možna delitev rotacijskih dajalnikov je tudi na eno-obratne in več-obratne. Eno-obratni rotacijski dajalniki podajo položaj znotraj enega obrata, medtem ko več-obratni štejejo tudi število polnih obratov. Dajalnike položaja delimo tudi glede na uporabljeni princip zaznavanja fizikalne spremembe, torej glede na uporabljeno tehnologijo. Poznamo magnetne, optične, induktivne in druge. Dajalniki se razlikujejo tudi glede na izhodne signale, in sicer poznamo inkrementalne in absolutne. Inkrementalni dajalniki, ki se jih včasih imenuje tudi relativni dajalniki, podajo relativno spremembo pozicije, ter smer premikanja, medtem ko absolutni dajalniki podajo absolutno pozicijo. Principi zaznavanja pri dajalnikih so:
• Optični
• Magnetni
• Induktivni
• Princip z vrtinčnimi tokovi Izbira tehnologije za naš razvoj se nagiba pretežno k optičnim in magnetnim linearnim dajalnikom, katera bosta v nadaljevanju seminarske naloge deležna večje pozornosti kot pa slednja dva.
Slika 1: Dajalnik položaja

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
4
Uporablja se najpogosteje v industriji obdelovalnih strojev CNC (computer numerical control), robotskih napravah, transportih, računalniških vhodnih napravah (optična miš, sledilne krogle), rotirajočih radarjih, merilnih in kontrolnih napravah, pri raznih pozicioniranjih, ipd.
2. Delovanje inkrementalnega dajalnika

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
5
Inkrementalni rotacijski dajalnik, znan tudi kot relativni rotacijski dajalnik se uporablja za spremljanje gibanja, za ugotavljanje pozicije (kota zasuka) in hitrosti. Inkrementalni dajalnik je elektromehanska naprava, uporabljena za zagotavljanje povratnih signalov iz gibajoče kontrolne aplikacije. Povratne signale, lahko uporabimo za različno vrsto informacij o rotacijskem oz linearnem mehanizmu. Lahko mu določimo pozicijo, smer rotacije in hitrost. Merimo disk, kateri je pritrjen na gred in nameščen med svetlobnim virom in senzorjem. Ko se skupaj zarotirata, pulzi oddajnika svetlobe trčijo v senzor, vsakič, ko je reža na disku usklajena oz vzporedna z senzorjem in oddajnikom svetlobe. Vsak svetlobni impulz je pretvorjen v električni impulz iz signalne naprave. Temu rečemo inkrementalni dajalnik, zato, ker se proizvedeni impulzi, štejejo naenkrat.
Slika 2: Shema inkrementalnega dajalnika

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
6
Slika 3: Eno – izhodni disk inkrementalnega dajalnika
V tem simplističnem primeru ima dajalnik eno progo rež, natančno nameščene okoli diska. Če bi bile reže za 1 stopinjo narazen, bi dajalnik proizvedel 360 impulzov, vsakič ko bi naredil en krog. Eno – progasti dajalniki se tipično uporabljajo za rotacijske naprave v avtomobilski industriji kot merilni števci, Tahometri (RPM (obrati na minuto)). Meritev hitrosti določimo na dva dela:
• Z meritvijo časovnega intervala med impulzi
• Z štetjem impulzov v časovnem obdobju
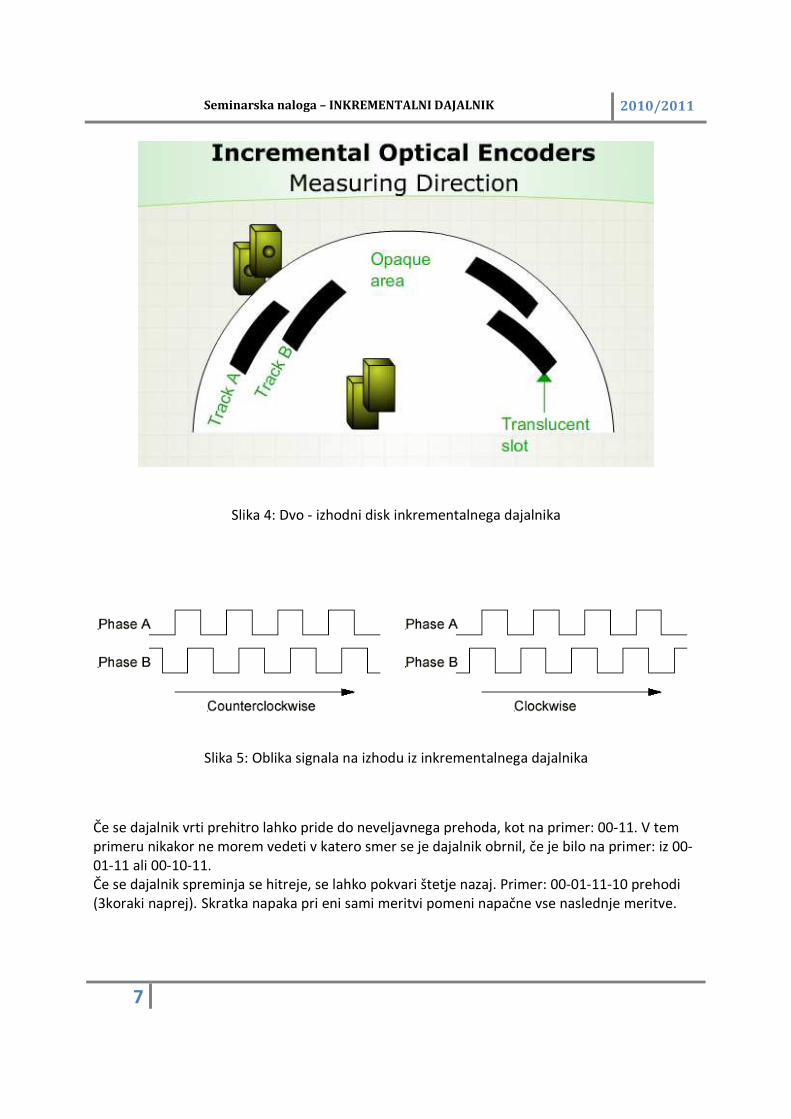
Slabost eno – progastega dajalnika je, da ne moremo določiti smeri vrtenja. Če želimo določiti tudi smer, moram dodati še eno progo. Sedaj, ko imamo dve progi, označeni
A in B, proizvedeta impulz vlakov, ki označujeta premik. Vsaka proga vsebuje svoj svetlobni vir in senzor. Progi sta v kvadraturnem položaju, kar pomeni, da sta zamaknjena za 90 stopinj. Rezultat je, da dva ponavljajoča se kvadrata, valovita 90 stopinj od faze, katera sta vsaka proizvedena, kadar se vrti dajalnik. A in B kanal uporabljamo za določanje smeri rotacije z oceno kateri kanal vodi pred drugim. Če je proga B, zaznana pred progo A, bo vezje dajalnika kazal, da se bo disk vrtel v smeri urinega kazalca. Če pa je proga A, zaznana pred progo B, bo vezje dajalnika kazalo, da se disk vrti v nasprotni smeri urinega kazalca.
Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
7
Slika 4: Dvo - izhodni disk inkrementalnega dajalnika
Slika 5: Oblika signala na izhodu iz inkrementalnega dajalnika
Če se dajalnik vrti prehitro lahko pride do neveljavnega prehoda, kot na primer: 00-11. V tem primeru nikakor ne morem vedeti v katero smer se je dajalnik obrnil, če je bilo na primer: iz 00-01-11 ali 00-10-11. Če se dajalnik spreminja se hitreje, se lahko pokvari štetje nazaj. Primer: 00-01-11-10 prehodi (3koraki naprej). Skratka napaka pri eni sami meritvi pomeni napačne vse naslednje meritve.
Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
8
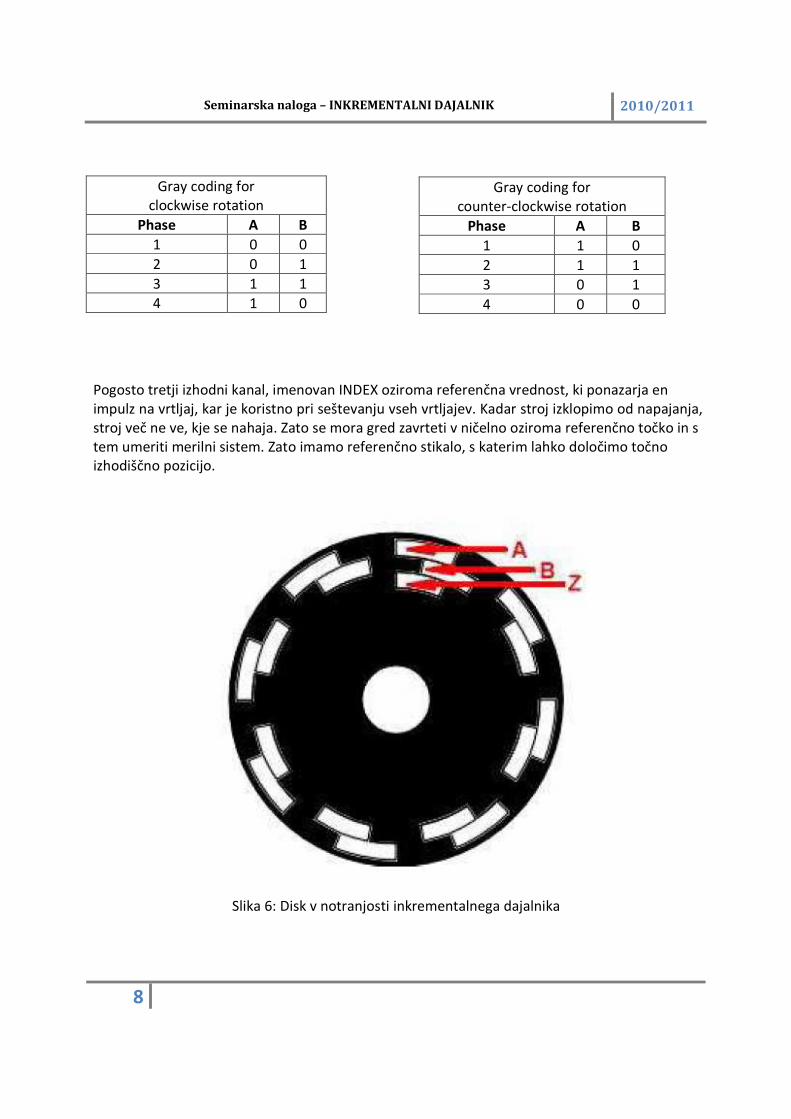
Pogosto tretji izhodni kanal, imenovan INDEX oziroma referenčna vrednost, ki ponazarja en impulz na vrtljaj, kar je koristno pri seštevanju vseh vrtljajev. Kadar stroj izklopimo od napajanja, stroj več ne ve, kje se nahaja. Zato se mora gred zavrteti v ničelno oziroma referenčno točko in s tem umeriti merilni sistem. Zato imamo referenčno stikalo, s katerim lahko določimo točno izhodiščno pozicijo.
Slika 6: Disk v notranjosti inkrementalnega dajalnika
Gray coding for clockwise rotation
Phase A B
1 0 0
2 0 1
3 1 1
4 1 0
Gray coding for counter-clockwise rotation
Phase A B
1 1 0
2 1 1
3 0 1
4 0 0

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
9
Slika 7: Vzorci prog inkrementalnega diska
2.1. Primer uporabe inkrementalnega dajalnika
Inkrementalni dajalniki so izjemno pomembni in razširjeni merilniki pomikov. Temeljijo na štetju
rastrskih razdelkov, to štetje pa je izvedeno s pomočjo Moirejevega vzorca.

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
10
3. Moirejev vzorec
Za nastanek moirejevega vzorca se uporabljata dve uklonski mrežici, ki sta postavljeni ena pred drugo. Ena od uklonskih mrežic je pritrjena na merilni objekt in se imenuje merilna mrežica, druga pa je fiksna in se imenuje referenčna mrežica. Osnova tega vzorca je uporaba dveh različnih rešetk (P1 in P2), ki jih fizično oziroma optično prekrijemo, s čimer nastane Moirejev vzorec. Moirejev vzorec nastane kot posledica prekrivanja dveh rešetk, ki pa imata različni periodi. Torej se razdalja med dvema rastroma razlikuje za majhno vrednost. To prikazuje slika 8, kjer vidimo, da ima mrežica P1 večjo period kot mrežica P2 saj ima mrežica P2 na enaki razdalji več rastrov.
Slika 8: Uklonski mrežici z različnima periodama
Kadar se periodi merilne in referenčne mrežice razlikujeta za majhno vrednost in ti dve mrežici superproniramo eno preko druge dobimo Moirejev vzorec. To prikazuje slika 8.
Slika 9: Pojav Moirejevega vzorca pri superproniranju mrežic z različnima periodama

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
11
Če se periodi mrežic razlikujeta za majhno vrednost se bodo po dolžini območja superproniranja mrežic pojavljala območja, v katerih bo svetloba prehajala skozi obe mrežici nemoteno, hkrati pa bodo po dolžini območja prekrivanja nastala tudi območja, kjer se mrežici prekrijeta tako, da ne prepuščata svetlobe. Gre za tako imenovana območja oslabitve in ojačitve. Svetla področja posamezne rešetke prepuščajo svetlobo in tam je prepustnost enaka 1, temna področja pa blokirajo svetlobo, zato je tam prepustnost svetlobe enaka 0. Ko svetlo področje ene rešetke sovpade s temnim področjem druge rešetke, je prepustnost svetlobe enaka 0, kar ustreza temnemu Moirejevemu kolobarju, ki ga predstavlja slika 10. Kadar pa svetlo področje ene rešetke sovpada s svetlim področjem druge rešetke pa je povprečna prepustnost svetlobe enaka 0,5, kar ponazarja slika 11. Občutljivost Moireieve metode je tako odvisna od periode rešetke. Manjša kot je perioda, večja je občutljivost. Kadar svetlo in temno področje sovpadata, govorimo o temnem Moirejevem kolobarju, kar pomeni, da je prepustnost svetlobe na določenih mestih enaka 0.
Slika 10: Temen Moirejev kolobar
Svetel Moirejev kolobar oziroma svetla področja rešetk sovpadajo in prepustnost svetlobe je na določenih mestih 0,5.
Slika 11: Svetel Moirejev kolobar
Svetlobni tok, ki ga izmerimo v neki točki vzdolž območja prekrivanja se tako ob premikanju merilne mrežice sinusno spreminja. Svetlobni tok se spremeni iz neke maksimalne vrednosti na

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
12
minimalno in nazaj na maksimalno, za vsak premik mrežice, ki ustreza njeni periodi. Če postavimo dva detektorja na ustrezno medsebojno razdaljo kot prikazuje slika 12, lahko dobimo dva signala, ki sta med seboj zamaknjena za želeni fazni kot (običajno za 90°). To prikazuje slika 13. Prepustnost se spreminja tudi, če spreminjamo periodo merilne mrežice. Prepustnost svetlobe merimo s pomočjo svetlobnega vira in fotodetektorjev. Običajno uporabimo par detektorje za zamaknjenih ½ periode, da lahko določimo smer premika (oblika sinusa).
Slika 12: Položaj fotodetektorjev
Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
13
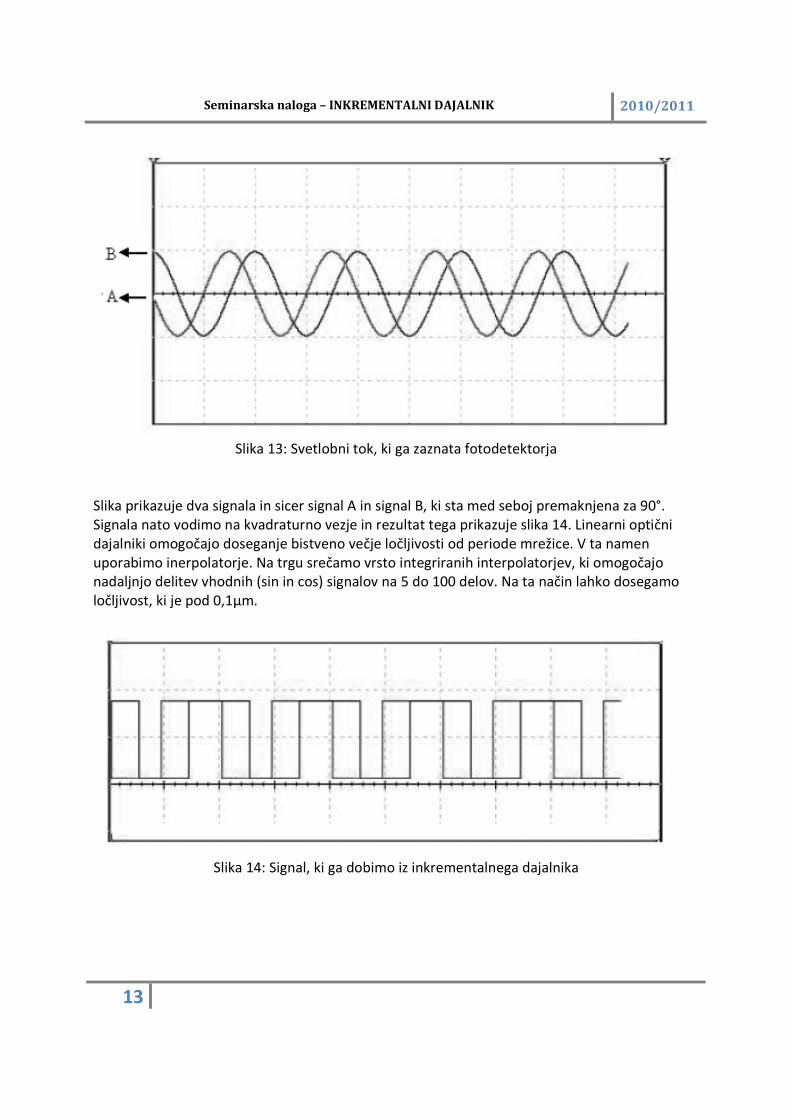
Slika 13: Svetlobni tok, ki ga zaznata fotodetektorja
Slika prikazuje dva signala in sicer signal A in signal B, ki sta med seboj premaknjena za 90°. Signala nato vodimo na kvadraturno vezje in rezultat tega prikazuje slika 14. Linearni optični dajalniki omogočajo doseganje bistveno večje ločljivosti od periode mrežice. V ta namen uporabimo inerpolatorje. Na trgu srečamo vrsto integriranih interpolatorjev, ki omogočajo nadaljnjo delitev vhodnih (sin in cos) signalov na 5 do 100 delov. Na ta način lahko dosegamo ločljivost, ki je pod 0,1µm.
Slika 14: Signal, ki ga dobimo iz inkrementalnega dajalnika

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
14
4. Optični inkrementalni dajalnik Najbolj znani so optični dajalniki. Temeljijo na presvetlitvi ali odboju svetlobe od
merilne letve ali merilnega obroča z določenim rastrom in zaznavi ter procesiranju tako dobljenih optičnih signalov. Za svetlobni vir se večinoma uporablja infrardeče LED diode in fotodetektorje infrardeče svetlobe. Valovna dolžina infrardeče svetlobe je daljša od valovne dolžine vidne svetlobe, zato je senzor skorajda neobčutljiv na vidno svetlobo iz okolice, ki bi drugače predstavljala izvor šuma, za odpravo katerega bi morali uporabiti dodatno filtriranje. Pri presvetlitveni metodi se svetlobni vir nahaja nad fotodetektorjem, vmes pa se postavi merilno letev oziroma obroč (izraz za oba lahko poenotimo v merilni trak), kar je prikazano na sliki 15. Raster merilnega traku je sestavljen iz transparentnih in netransparentnih razdelb, kjer prve prepuščajo svetlobo, druge pa ne. Pred fotodetektorjem se nahaja še zaslonka, ki ima ravno tako transparentne in netransparentne razdelbe enakega rastra kot merilni trak. Merilna glava, sestavljena iz svetlobnega vira, zaslonke in fotodetektorja, se premika vzdolž merilnega traku. Svetloba lahko prehaja samo čez transparentne razdelbe. Jakost detektirane svetlobe je najmočnejša, ko raster zaslonke natančno sovpada z rastrom merilnega traku, torej ko so transparentne razdelbe zaslonke točno nad transparentnimi razdelbami merilnega traku. Ko sta rastra zamaknjena za dolžino celotne razdelbe, svetloba ne prehaja. Pri vmesnih stanjih je jakost svetlobe odvisna od medsebojnega prekrivanja rastra. Fotodetektor zaznava spremembe jakosti svetlobe in jih pretvarja v električni signal.
Slika 15: Presvetlitvena metoda
Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
15
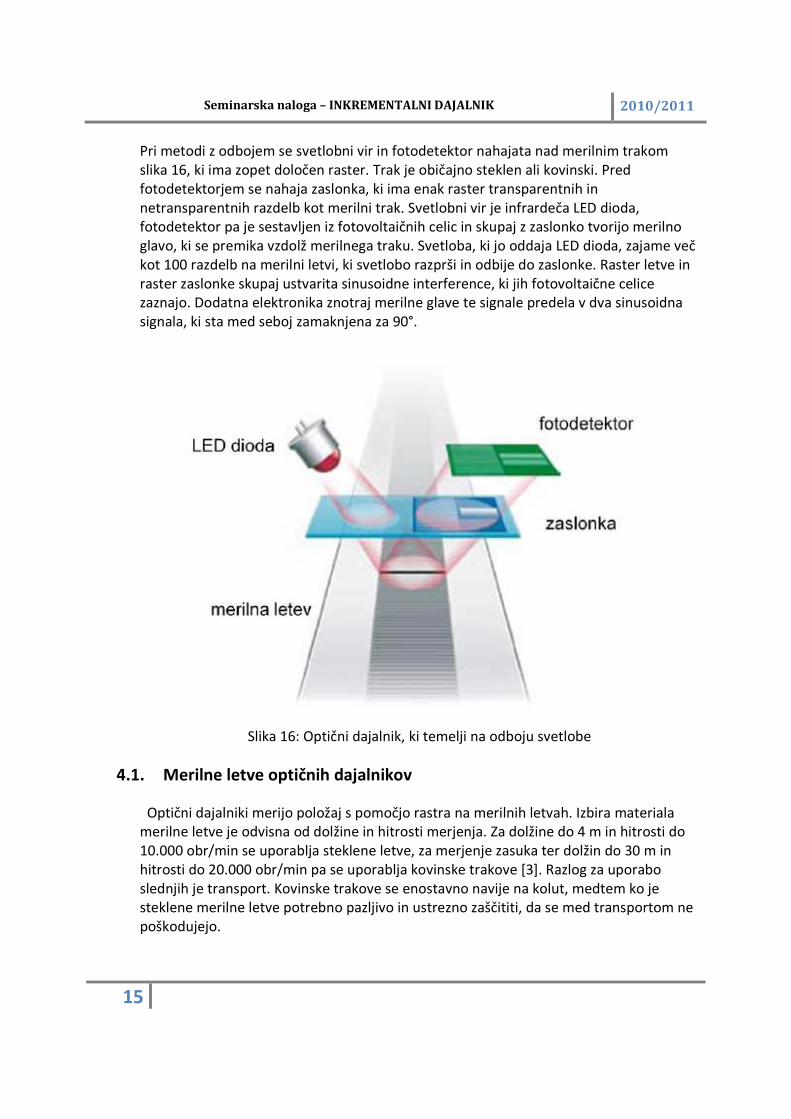
Pri metodi z odbojem se svetlobni vir in fotodetektor nahajata nad merilnim trakom slika 16, ki ima zopet določen raster. Trak je običajno steklen ali kovinski. Pred fotodetektorjem se nahaja zaslonka, ki ima enak raster transparentnih in netransparentnih razdelb kot merilni trak. Svetlobni vir je infrardeča LED dioda, fotodetektor pa je sestavljen iz fotovoltaičnih celic in skupaj z zaslonko tvorijo merilno glavo, ki se premika vzdolž merilnega traku. Svetloba, ki jo oddaja LED dioda, zajame več kot 100 razdelb na merilni letvi, ki svetlobo razprši in odbije do zaslonke. Raster letve in raster zaslonke skupaj ustvarita sinusoidne interference, ki jih fotovoltaične celice zaznajo. Dodatna elektronika znotraj merilne glave te signale predela v dva sinusoidna signala, ki sta med seboj zamaknjena za 90°.
Slika 16: Optični dajalnik, ki temelji na odboju svetlobe
4.1. Merilne letve optičnih dajalnikov
Optični dajalniki merijo položaj s pomočjo rastra na merilnih letvah. Izbira materiala merilne letve je odvisna od dolžine in hitrosti merjenja. Za dolžine do 4 m in hitrosti do 10.000 obr/min se uporablja steklene letve, za merjenje zasuka ter dolžin do 30 m in hitrosti do 20.000 obr/min pa se uporablja kovinske trakove [3]. Razlog za uporabo slednjih je transport. Kovinske trakove se enostavno navije na kolut, medtem ko je steklene merilne letve potrebno pazljivo in ustrezno zaščititi, da se med transportom ne poškodujejo.

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
16
Slika 17, prikazuje merilni letvi iz invarja (zlitine niklja in železa z majhnim razteznim koeficientom) in merilne obroče iz nerjavečega jekla, ki so primerni za dajalnike, ki temeljijo na odboju svetlobe.
Slika 17: Primeri merilnih letev in obročev za optične dajalnike
Optični dajalniki so torej primerni za aplikacije, kjer potrebujemo veliko natančnost merjenja pozicije. Fotolitografski postopki so precej dragi, saj zahtevajo izjemno čisto okolje proizvodnje, zato so posledično drage tudi merilne letve in merilni obroči. Zaradi uporabljenih materialov so merilne letve precej občutljive in jih je potrebno zavarovati pred zunanjimi vplivi. Onesnaženje zaradi prahu, vlage, prstnih odtisov, olja ali drugih sredstev lahko povzroči izpad funkcije merjenja ali poslabšanje merilnih lastnosti – natančnosti, hitrosti odziva… Lahko pride tudi do poškodovanja površine merilne letve, kjer se pojavijo razne praske. V industrijskem okolju (v obdelovalnih strojih, stružnicah in podobno) se zato uporablja zaprte sisteme, kjer je merilna letev zaprta v aluminijastem ohišju, ki jo ščiti pred zunanjimi vplivi. V čistih okoljih (v merilnih strojih, v polprevodniški industriji) pa lahko uporabljamo odprte sisteme, kjer merilna letev ni zaščitena. Optični princip je najboljša izbira za natančne in čiste aplikacije.
Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
17
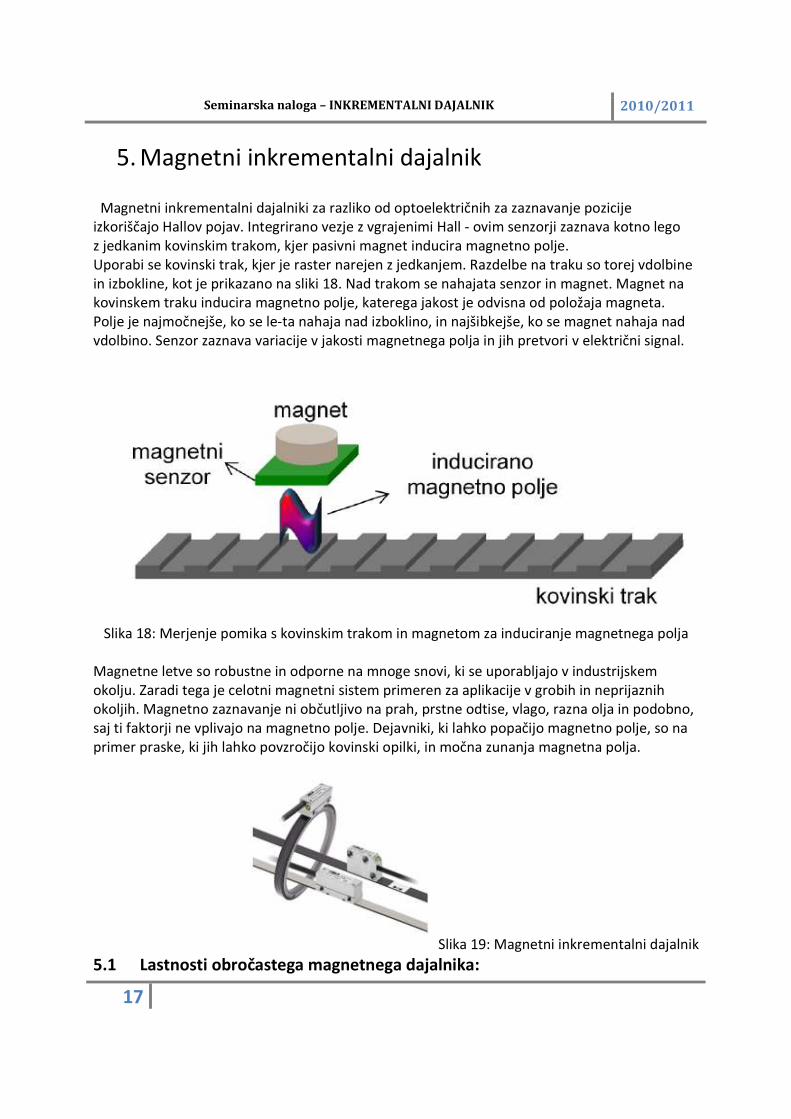
5. Magnetni inkrementalni dajalnik Magnetni inkrementalni dajalniki za razliko od optoelektričnih za zaznavanje pozicije izkoriščajo Hallov pojav. Integrirano vezje z vgrajenimi Hall - ovim senzorji zaznava kotno lego z jedkanim kovinskim trakom, kjer pasivni magnet inducira magnetno polje. Uporabi se kovinski trak, kjer je raster narejen z jedkanjem. Razdelbe na traku so torej vdolbine in izbokline, kot je prikazano na sliki 18. Nad trakom se nahajata senzor in magnet. Magnet na kovinskem traku inducira magnetno polje, katerega jakost je odvisna od položaja magneta. Polje je najmočnejše, ko se le-ta nahaja nad izboklino, in najšibkejše, ko se magnet nahaja nad vdolbino. Senzor zaznava variacije v jakosti magnetnega polja in jih pretvori v električni signal.
Slika 18: Merjenje pomika s kovinskim trakom in magnetom za induciranje magnetnega polja
Magnetne letve so robustne in odporne na mnoge snovi, ki se uporabljajo v industrijskem okolju. Zaradi tega je celotni magnetni sistem primeren za aplikacije v grobih in neprijaznih okoljih. Magnetno zaznavanje ni občutljivo na prah, prstne odtise, vlago, razna olja in podobno, saj ti faktorji ne vplivajo na magnetno polje. Dejavniki, ki lahko popačijo magnetno polje, so na primer praske, ki jih lahko povzročijo kovinski opilki, in močna zunanja magnetna polja.
Slika 19: Magnetni inkrementalni dajalnik
5.1 Lastnosti obročastega magnetnega dajalnika:

Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
18
• Ločljivost do 13 bitov (8192 položajev na obrat)
• Delovanje pri visokih hitrostih, do 60000 obr/min
• Brezkontaktna izvedba
• Odlična zaščita pred okoljskimi vplivi
• Obratovalna temperatura od -40 °C do +125 °C
• Industrijsko standardizirani absolutni, inkrementalni in analogni izhodi
• Natančnost do ±0,2 kotne stopinje
• Preprosta vgradnja
6. Primerjava absolutnega in inkrementalnega dajalnika
Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
19
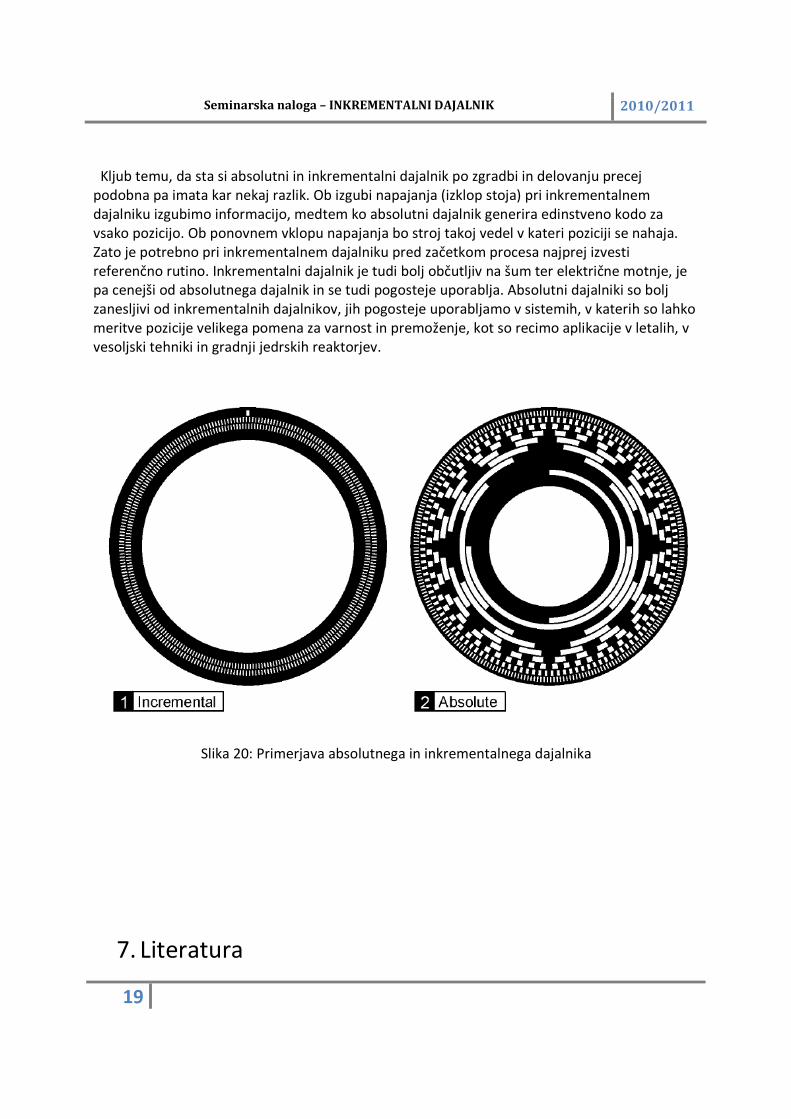
Kljub temu, da sta si absolutni in inkrementalni dajalnik po zgradbi in delovanju precej podobna pa imata kar nekaj razlik. Ob izgubi napajanja (izklop stoja) pri inkrementalnem dajalniku izgubimo informacijo, medtem ko absolutni dajalnik generira edinstveno kodo za vsako pozicijo. Ob ponovnem vklopu napajanja bo stroj takoj vedel v kateri poziciji se nahaja. Zato je potrebno pri inkrementalnem dajalniku pred začetkom procesa najprej izvesti referenčno rutino. Inkrementalni dajalnik je tudi bolj občutljiv na šum ter električne motnje, je pa cenejši od absolutnega dajalnik in se tudi pogosteje uporablja. Absolutni dajalniki so bolj zanesljivi od inkrementalnih dajalnikov, jih pogosteje uporabljamo v sistemih, v katerih so lahko meritve pozicije velikega pomena za varnost in premoženje, kot so recimo aplikacije v letalih, v vesoljski tehniki in gradnji jedrskih reaktorjev.
Slika 20: Primerjava absolutnega in inkrementalnega dajalnika
7. Literatura
Seminarska naloga – INKREMENTALNI DAJALNIK 2010/2011
20
[1] http://lie.fe.uni-lj.si/diplome/PDF/2008/Diploma_BarbaraKiller.pdf [2] http://en.wikipedia.org/wiki/Rotary_encoder [3] http://www.wisc-online.com/objects/viewobject.aspx?id=iau8407 [4] http://www.pc-control.co.uk/incremental_encoders.htm [5] http://www.ro.feri.uni-mb.si/predmeti/seminar_1/porocila/p2005/babic_boldizar_haladeja.pdf [6] http://www.ig33k.com/Predogled/126 - Naprava za preverjanje pravilnosti delovanja optičnih inkrementalnih dajalnikov, Matija Šprinčnik, 2009 [7] http://www.educa.fmf.uni-lj.si/izodel/sola/2000/di/Postrak/zgradba_racunalnika/miska.htm [8] http://www.renishaw.si/sl/magnetni-dajalniki-pomika-in-magnetni-obrocasti-dajalniki--9802 [9] ftp://ftp.scv.si/vss/.../Senzorji%20%20v%20avtomatizaciji%20procesov.ppt


















