Power System Stability and Control - P. Kundur - 1994 - McGraw-Hill - ISBN9780070359581 (2).pdf
1196
Click here to load reader
-
Upload
angel-ramos -
Category
Documents
-
view
347 -
download
76
Transcript of Power System Stability and Control - P. Kundur - 1994 - McGraw-Hill - ISBN9780070359581 (2).pdf
-
P O W ER S Y S T EM S T A B ILIT Y
A N D C O N T R O L
P . K U N D U R
V ice-president, Pow er Engineering
Pow ertech Labs I nc . , S urreY, B ritish C olum bia
Form erlv M anag erA nalvtical M ethods and Sp ecialized S tudies D ep artm en t
Po w er S vstem Plannlhg D ivision, O n tario H vdro, Toron to
and
Adjunct ProfessorD epartm ent of Electricaland C om puter Engineering
U niversity of T oronto, T oronto, O ntario
Edited by
N ealJ . B alu
M ark G . Lauby
Pow er System Planning and O perations ProgramElectricalS ystem s D ivision
Electric Pow er R esearch lnst'Itte34 12 il illl/itl h/v A venuePalo A lto, C alifornia
*
k
M cG raw -H il1, lnc.N ew Y ork San Francisco W ashington,
M adridD .C . A uckland B ogot
Caracas Lisbon London M exico Ci+ M ilanM ontreal N ew D elhi San Juan SingaporeSydney Tokyo T oronto
N
-
C o ntents
FO R EW O R D xix
PREFA C E xxi
PA RT IG EN ERA L BA C K G R O U N D
1 G EN ERA L C HA RA CTERISYIC S O F M O D ERN PO W ER SY STEM S 3
1.1 Evolution of electric PoW er system s 31.2 Structure of the PoW er system 5
1.3 Pow er system
and
control 8
1.4 D ejign operating criteria for stability 13R eferences 16
2 IN TRO D U CTIO N TO TH E PO W ER SY STEM STA BILITY PRO BLEM 17
2.1 B asic concepts and *dzsnitions 17
2.1.1 ltotor angle stabilit)r 182.1.2 V oltage stability and voltage cllapse 272.1.3 M id-term and long-term stability 33
2.2 C lassiscation of stability 342.3 H istorical review of stability PrOblenzs 37R eferences 40
* *
V l l
-
* * @
V I I l C o ntents
PA RT 11 EQ U IPM EN T C H A RA C T ER IS T IC S A N D M O D ELLIN G
3 SY N C H R O N O U S M A C H IN E T H EO RY A N D M O D ELLIN G 4 5
3.1 Physical description 46
3.1.1 A rm ature and f eld structure 463.1.2 h4achines Al?itll llllTltillle pole @Palrs
$
49
3.1.3 M M F Nvavefornls 49
3.1.4 D irect and quadratureption
aXCS 53
3.2 M athem atical descri of a synchronous m achine 543.2.1 R eview of m agnetic circuit equations 56
3.2.2 B asic equations of a synchronous m achine 59
3.3 The dq0 transform ation 673.4 Per unit representation
Per unit
75
3.4.1 system for the stator quantities 753.4.2 Per unit stator voltage equations 763.4.3 Per unit rotor voltage equations 773.4.4 Stator fux linkage equations 783.4.5 Itotor f ux linkage equations 783.4.6 Per unit system for the rotor 79
3.4.7 Per unit POW er and torque 833.4.8 A lternative Per ult system s and transform ations 833.4.9 Sum m ary of Per unit equations 84
3.5 E quivalent circuits for direct and Quadrature aXCS 883.6 Steady-state analysis 93
3.6.1 V oltage, current, and ;ux linkage relationships 93
3.6.2 Phasor representation 95
3.6.3 Itotor angle 98
3.6.4 Steady-state
Procedure
equivalent circuit 993.6.5 for com puting steady-state values 100
3.7 E lectrical transient perform ance characteristics 105
3.7.1 Short-circuit current @111 a sim ple R L circuit 1053.7.2 T hree-phase short-circuit at the ternAinals of
a synchronous
llilzlillttit)lzm achine 107
3.7.3 of dc offset @111 short-circuit current 1083.8 M agnetic saturation 110
3.8.1 O pen-circuit and short-circuit characteristics 1103.8.2 R epresentation
lm provedof saturation @111 stability studies 112
3.8.3 m odelling of saturation 1173.9 E quations of m otion 128
-
C ontents i)t
3.9.1 R eview of m echanics of m otion 1283.9.2 Sw ing
M echanical
equation l28
3.9.3 starting tim e 132
3.9.4 C alculation of inertia constant 1323.9.5 R epresentation *111 system studies 135
R eferences l36
4 SY N C H R O N O U S M A C H IN E PA RA M ET ERS 13 9
4.1 O perational
Standard
paranleters 139
4.2 paranleters 144
4.3 Frequency-response
D eterm ination
characteristics 159
4.4 of synchTonous m achine paranleters 161R eferences 166
5 S Y N C H R O N O U S M A C H IN E R EPR ES EN TA T IO N
I,I S TA B ILITY S T U D IES 16 9
5.1 Sim plif cations essential for large-scale studies 1695.1.1 N eglect
N eglectingof stator A V ternAs 170
/ 5. 1.2 the effect of speed variations On stator voltages 174
5.2 Sim plis ed m odel Ahritlz am ortisseurs neglected 1795.3 C onstant tlux linkage m odel 184
5.3.1 C lassical m odel 184
5.3.2 C onstant tlux linkage m odel including the effects ofsubtransient circuits 188
5.3.3 Sum m ary
capabilityof sim plelim its
m odels for different tim e fram es 1905.4 R eactive 19l
5.4.1 R eactive capability*
and
CUCVCS 191
5.4.2 F curves com pounding Curves 196R eferences 198
6 A C T RA N S M IS S IO N 19 9
6.1 Transm ission lines 200
6.1.1 E lectrical characteristics 2006.1.2 Perform ance equations 2016.1.3 N atural br Surge im pedance loading 2056.1.4 E quivalent
Typicalcircuit of a transm ission line 206
6.1.5 paranleters 209
-
X C ontents
6.1.6 Perform ance requirem ents of POW er transm ission lines 211
6.1.7 V oltag and current prof le under no-load 211
6.1.8 V oltage-pow er characteristics 216
6.1.9 Pow er transfer and stability considerations 221
6.1.10 Effectof line loss On V-P and Q-P characteristics 2256. 1 . 1 1 Therm al lim its 2266.1.12 L oadabilit)r characteristics 228
6.2 T ransfornAers 231
6.2.1 R epresentation of tw o-w inding transfornAers 2326.2.2 R epresentation of three-w inding transfornzers 2406.2.3 Phase-shifting transfornAers 245
6.3 Transfer of POW CC
analysis
betw een active SOurCeS 2506.4 Pow er-f ow 255
6.4.1 N etw ork equations 2576.4.2 G auss-seidel m ethod 259
6.4.3 N ewton-Raphson (N-R)m ethod 260(9.21.21 Fastdecoupled load-fow (FDLF)
; ow
m ethods 2646.4.5 C om parison
Sparsity-orientedof the P0W r- solution m ethods 267
6.4.6 triangular factorization 268
6.4.7 N etw ork reduction 268R eferences 269
7 PO W ER SY ST EM LO A D S 27 1
7.1 B asic load-m odelling concepts 2717.1.1 Static load m odels 2727.1.2 D ynam ic load m odels 274
7.2 M odelling of induction nlotors 2797.2.1 E quations of an induction m achine 2797.2.2 Steady-ssate
A lternativecharacteristics 287
7.2.3 rotor constructions 293:7.:!.21 R epresentation
Per unit
of saturation 2967.2.5 representation 297
7.2.6 R epresentation @111 stability studies 3007.37.4 z '
-
C ontents xi
8 EX C ITA T IO N SY ST EM S 3 15
8.1 Excitation system requirem ents 3158.2 E lem ents of an excitation system 3178.3 T ypes of excitation system s 3 18
8.3.1 D C excitation system s 3198.3.2 A C excitation system s 320
8.3.3 Static excitation system s 323
8.3.4 R ecent developm ents and future trends 3268.4 D ynam ic perform ance nleasures 327
8.4.1 L arge-signal
Sm all-signal
perform ance
perform ance
nleasures 327
8 4 2@ * nAeasures 330
8.5 C ontrol and protective functions 3338.5.1 A C and D C regulators 333
8.5.2 E xcitation system stabilizing circuits 334
8.5.3 Power system stabilizer (PSS) 3358.5.4 L oad com pensation 3358.5.5 U nderexcitation lim iter 337
8.5.6 O verexcitation lim iter 3378.5.7 V olts-per-hertz lim iter and protection 3398.5.8 Field-shorting circuits 340
8.6 M odelling8.6.1
of excitation system s 341
Per unit system 3428.6.2 M odelling
M odelling
of excitation system com ponents 347
8.6.3 of com plete excitation system s 362
8.6.4 Field testing for m odel developm ent and verif cation 372R eferences * 373
9 P R IM E M O V ERS A N D EN ERG Y S U PPLY SY S T EM S 3 7 7
9.1 H ydraulic turbines and governing system s 377
9.1.1 H ydraulic turbine transfer function 379
9.1.2 N onlinear turbine m odel assum ing
turbinesinelastic w ater colum n 387
9.1.3 G overnors for hydraulic 3949.1.4 D etailed hydraulic system m odel 4049.1.5 G uidelines for m odelling hydraulic turbines 417
9.2 Steam turbines and governing
of steam
system s 4 18
9.2.1 M odelling turbines 4229.2.2 Steam turbine controls 4329.2.3 Steam turbine off-frequency capability 444
-
rF >
X I I C o ntents
9.3 T herm al energy
Fossil-fuelledsystem s 449
9.3.1 energy system s 449
9.3.2 N uclear-based energy system s 455
9.3.3 M odelling of therm al energy system s 459R eferences 460
10 H IG H -V O LTA G E D IR EC T -C U R R EN T T RA N S M IS S IO N 4 6 3
10.1 H V D C system conf gurations and com ponents
links464
1 0. 1 . 1 C lassis cation of H V D C 46410.1.2 C om ponents of H V D C transm ission system 467
10.2 C onverter theory and perform ance equations 46810.g . j V alve characteristics 46910.2.2 C onverter circuits 470
10.2.3 C onverter transform er rating 49210.2.4 M ultiple-bridge converters 493
10.3 A bnorm al operation 498
10.3.1 Arc-back (backsre) 49810.3.2 C om m utation failure 499
10.4 C ontrol of H V D C system s 500
10.4.1 B asic principles of control 50010.4.2 C ontrol im plem entation 51410.4.3 C onverter ring-control system s 51610.4.4 V alve blocking and bypassing 52010.4.5 Starting,
C ontrols
stopping,
for
and POW er-tlow reversal 521
10.4.6 eO ancem ent of c system perform ance 52310.5 H arm onics and f lters 524
10.5.1 A C side harm onics 52410.5.2 D C side harm onics 527
10.6 lniuence of ac system strength on ac/dc system interaction 52810.6.1 Short-circuit ratio 52810.6.2 R eactive >PoW er
Ahritlland aC system strength 529
10.6.3 Problem s 1()A,;E SC R system s 53010.6.4 Solutions to Pr0blenzs associated Ahritll w eak system s 53110.6.5 E ffective inertia constant 532
10.6.6 Forced com m utation 53210.7 R esponses
10.7.1
to dc and aC system faults 533
D C line faults 53410.7.2 C onverter faults 535
10.7.3 A C system faults 535
-
C ontents III
10.8 M ultiterm inal H V D C system s 538
10.8.1 M TD C netw ork con gurations 53910.8.2 C ontrol of M T D C system s 540
10.9 M odelling of H V D C system s 54410.9.1 R epresentation for P0W er-
dc
*
S ow solution 54410.9.2 Per unit system for quantities 56410.9.3 R epresentation for stability studies 566
R eferences 577
11 C O N T R O L O F A C T IV E PO W ER A N D R EA C T IV E PO W ER 58 1
1 1 . 1 A ctive PoW er and frequency control 581
1 1 . 1 . 1 Fundam entals of speed governing 5821 1.1.2 C ontrol of generating unit POW er output 592
1 1.1.3 C om posite regulating characteristic of POW er system s 5951 1.1.4 R esponse
Fupdam entals
rates of turbine-governing system s 59811.1.5 of autom atic generation control 601
1 1.1.6 lm plem entation
U nderfrequency
of A G C 617
1 1.1.7 load shedding 6231 1.2 R eactive PoW er and voltage control 627
1 1.2.1 Production and absorption of reactive PoW er 6271 1.2.2 M ethods of voltage control 6281 1.2.3 Shunt kreactors 629
11.2.4 Shunt capacitorscapacitors
631
11.2.5 Series 633
l 1.2.6 SynchTonous condensers 638
l 1.2.7 Static Var system s 63911.2.8 Principles of transm ission system com pensation 654
1 1.2.9 M odelling
A pplication
of reactive com pensating devices 672
11.2.10 of tap-changing transfornlers to
transm ission system s 678
l 1.2.1 1 D istribution system voltage regulation 67911.2.12 M odelling of transform er U L T C control system s 684
11.3 Pow er-i ow analysis procedures 687%1 1.3.1 Prefault PoW er floW s 687
11.3.2 Postfault PoW er G ow s 688R eferences 691
-
xiv C ontents
PA R T III S Y S T EM S T A B ILIT Y : physical aspects, analysis,and ir:lprovem ent
12 S M A LL-S IG N A L S TA BILITY 6 9 9
12.1 Fundam ental concepts of stability of dynam ic system s 70012.1.1 State-space representation 700
12.1.2 Stability of a dynam ic system 702
12.1.3 L inearization 70312.1.4 A nalysis of stability 706
12.2 E igenproperties12.2.1
of the state m atrix 707E igenvalues 707
12.2.2 E igenvectorsM odal
707
12.2.3 m atrices 708
12.2.4 Free m otion of a dynam ic
sensitivity,
system 709
12.2.5 s4ode shape, and participation factor 71412.2.6 C ontrollability and observability 71612.2.7 T he concept of com plex
betw een
frequency 717
12.2.8 R elationship
C om putation
eigenproperties and transfer functions 719
12.2.9 of eigenvaluesof a
726
12.3 Sm all-signal12.3.1
stability single-m achine infnite bus system 727G enerator represented by the classical m odel 728
12.3.2 E ffects of synchronous m achine S eld circuit dynam ics 73712.4 E ffects of excitation system 75812.5 Pow er system stabilizer 76612.6 System
Sm all-signalstate m atrix w ith am ortisseurs 782
12.7 stability of m ultim achine system s
large
792
12.8 Special techniques for analysis of Very system s 79912.9 C haracteristics of sm all-signal stability PrOblenAs 817R eferences 822
13 T RA N S IEN T S TA B ILITY 8 2 7
13.1 A n elenlentary view of transient stability 82713.2 N um erical integration m ethods 836
13.2.1 Euler m ethod 836
13.2.2 M odi ed E uler m ethod 838
13.2.3 Runge-Kutta (It-lC)m ethods 83813.2.4 N um erical stability of explicit
m ethodsintegration m ethods 841
13.2.5 lm plicit integration 842
-
C ontents XV
13.3 Sim ulation of PoW er system dynam i'c reSPOnSe 848
13.3.1 Structure of the PoW er system m odel 848
13.3.2 SynchTonous
E xcitation
m achine representation 849
13.3.3 syytem representation 855
13.3.4 Transm ission netw ork and load representation 85813.3.5 O verall system equations 85913.3.6 Solution of overall system equations 861
13.4 A nalysis of unbalanced faults 87213.4.1 lntroduction to sym m etrical com ponents 87213.4.2 Sequence
Sequence
Sequence
13.4.3
im pedances
inApedances
of synchronous nAachines 877of transm isyion lines 884
13.4.4 im pedances of transform ers 884
13.4.5 Sim ulation of different types of faults 885
13.4.6 R epresentation of open-conductor conditions 89813.5 Perform ance of protective relaying
protection
903
13.5.1 Transm ission line 90313.5.2 Fault-claring tim es 91113.5.3 R elaying quantities during sw ings 914
13.5.4 Evaluation pf distance relayduring
perform ance during sw ings 91913.5.5 Prevention of tripping transient conditions 92013.5.6 A utom atic line reclosihg 92213.5.7 G enerator out-of-step protection 92313.5.8 L oss-of-excitation protection 927
13.6 C ase study of transient stability of a large system 934
13.7 D irect m ethod of transient stability analysis 94113.7.1 D escription of the transint energy function approach 94113.7.2 A nalysis
L im itations
of practical PoW er system s 94513.7.3 of the direct m ethods 954
R eferences 954
14 V O LTA G E STA QILITY 959
14.1 Basic concepts related to voltag stability 96014.1.1 Transm issiqn system characteristics 96014.1.2 G enerator characteristics 967
14.1.3 L oad characteristics 968
14.1.4 C haracteristics of reactive com pensating devices 96914.2 V oltage collapse
T ypical973
14.2.1 scenario of voltage collapse 97414.2.2 G eneral characterization based On actual incidents 975
-
xv i C ontents
14.2.3 C lassif cation of voltage stability 97614.3 V oltage stability analysis 977
14.3.1 M odelling
D ynam ic
Static
14.3.2
requirem ents 978
analysis 97814.3.3 analysis 99014.3.4 D eterm ination of shortest distance to instability 100714.3.5 The continuation P0W er-; ow analysis 1012
14.4 Prevention of voltage collapse 1019
14.4.1 System
System -operating
design n3easures 101914.4.2 nleasures 1021
R eferences 1022
15 SU BSY NCHRO NO US O :CILLA TIO NS 1025
15.1 Turbine-generator
15.1.1
torsional characteristics 1026ShaR system m odel 1026
15- 1.2 T orsional natural frequencies and m ode shapes 1034
15.2 T orsional interaction w ith PoW er system controls 1041
15.2.1 lnteraction Ahritll generator
speed
excitation controls 1041
15.2.2 lnteraction AAritll governors 1047
15.2.3 lnteraction shritll nearby dc converters 104715.3 SubsynchTonous resonance 1050
15.3.1 C haracteristics of series capacitor-com pensatedtransm ission system s 1050
15.3.2 Self-excitation due ttl induction generator effect 105215.3.3 T orsional interaction resulting @111 SSR 1053
15.3.4 A nalytical m ethods 1053
15.3.5 C ounterm easures to SSR PrOblenls 1060
15.4 lm pact
T orsionalof netw ork-sw itching disturbances 1061
15.5 interaction betw een closely coupled units 1065
15.6 H ydro generator torsional characteristics 1067R eferences 1068
16 M ID -T ER M A N D LO N G -T ER M S T A BILIT Y 10 73
16.1 N ature of system reSPOnSe to Severe upsets 1073
16.2 D istinction betw een m id-term and long-term stability 107816.3 Pow er plant reSPOnSe during Severe upsets 1079
16.3.1 T herm al POW er plants 1079
16.3.2 H ydro PoW er plants 1081
-
C ontents xvii
16.4 Sim ulation of long-term dynam ic rdsponse 108516.4.1 Purpose
M odellingof long-term dynam ic sim ulations 1085
16.4.2 requirem entsintegration
1085
16.4.3 N um erical teclm iques 108716.5 C ase studies of severe system upsets 1088
16.5.1 C ase study
study
involving
involvingan overgenerated
undergeneratedisland 1088
16.5.2 C ase an island 1092R eferences 1099
17 M ET H O D S O F IM PR O V IN G S TA BILITY 1 10 3
17.1 Transient stability enhancem ent 110417.1.1 H igh-speed
R eduction
fault clearing 1104
17.1.2 of transm ission system reactance 1104
17.1.3 R egulated, shunt com pensation 110517.1.4 D ynam ic braking 110617.1.5 R eactor sw itching 1106
17.1.6 lndependent-pole
Single-pole
Steam
17.1.7
operation of circuit breakers 1107sw itching 1107
17.1.8 turbine fast-valving 111017.1.9 G enerator tripping 1118
17.1.10 C ontrolled system
excittionseparation and load shedding 1120
17.1.11 H igh-speedD ijcontinuous
system s 1121
17.1.12 excitation control 1124
17.1.13 C ontrol of H V D C transm ission links 112517.2 Sm all-signal stability enhancenaent 1127
17.2.1 Pow er system stabilizers 1128
17.2.2 Supplem entary
Supplem entary
control of static Var com pensators 114217.2.3 control of H V D C transm ission links 1 1 5 1
R eferences 1161
IN D EX 1 16 7
-
Forew ord
T o paraphrase
interconnected
the renow ned electrical engineer, C harles Steinnxetz,the N orthA m erican pow er system is the largest and m ost com plex m achine everdevised by Eqan. lt @IS truly am azing that such a system has operated w ith a highdegree of reliability
T he robustness
for Over a century.
of a POW er system is m easured by the ability of the system tooperate in a state of equilibrium under notm al
stability
and perturbed conditions.Pow er systemdeals w ith the study of the behavior of pow er system s under conditions such
aS sudden changes ill load Or generation Or short circuits On transm ission lines@ A
POW ef system @IS said to be stable if the intercom lected generating units rem ain *111
synchronism .The ability of a POW CC system to m aintain stability depends to a large extent
On the controls available On the system to dam p the electrom echanical oscillations.
H ence, the study and design of controls are Very im portant.
O f a11 the com plex phenom ena on pow er system s,POW CC system stability is them ost intricate to understand and challenging ttlanalyze. E lectric pow er system s of the21st century Ahrill present an even DAOFC form idable challenge aS they are forced to
operate closer to their stability
of a
lilr its.
l cannot tllilllc DIOCC qualif ed Person than I7r.Prabha K undur to w rite a
book On POW er system stability and control. D r. K undur @IS an internationallyrecognized authority On PoW er system stability.H is expertise and practicalexperience
in developing solutions to stability PrOblenAs issecond to none.I7r.Kundurnot onlyhas a thorough grasp of the fund@m ental concepts but also has vvorked On solvingelectric tltilit)r system stability PrOblenls w orldw ide. H e has taught rnany COurSeS,m ade excellent presentations at professional society and industry com m ittee m eetings,
(
x ix
-
XX Forew ord
and has w ritten num efous technical Papers On POW er system stallilit)r and control.lt gives m e great pleasure
be of
to w rite the Foresvord for this tim ely
students
book, w hich1 am con dent Ahrill great value to practicing engineers and in the f eldof PoW er engineering.
D r.N eal 5.B alu
Program 4anager
Pow er System Planning and O perationsE lectrical System s D ivision
E lectric Pow er Itesearch lnstitute
-
Preface
This book @IS concerned w ith understanding, m odelling, analyzing, andm itigating pow er system stability and control problem s.Such problem s constitute Veryim portant considerations @11l the planning, design, and operation of m odern POW er
of thesystem s.
grow th
and
The com plexity of POW CF system s is continually increasing becausein interconnections and uSe of new technologies. A t the SanAe tim e, fnancial
regulatory constraints have forced utilities to operate the system s
stability
nearly at
stability lilnits. These tANrtl factors have created nCW types of Pr0blem s.G reater reliance *1S, therefore, being placed On the use of special control aids to
enhance system security,facilitate econom ic design,and provideteclm olo
greater flellillilit)rofsystem operation.l11 addition, advances *111 com puter gy, hum erical analysis,control theory, and equipm ent m odelling have contributed to th developm ent ofim provedm otivation
analyticalfor w riting
tools and better system -design procedures. The prim arythis book has been to describe these neW deyelopm ents and to
provide a conaprehensive treatm ent of the b'ectSu J .
The text presented @111 this book draNvs together m aterial Onl POW er
taughtsystem
stability and control from m any
1979,
Sources : graduate COurSeS 1 have at theU niversity of T oronto since several E PR IL
--
* 997)research projects (RP1208,
have
r 2447,
> 3040, RP 31415- r 4000, r 849, and Ahritll w hich 1 been closelyassociated, and a vast nui ber of technical Papers published by the IE E E , IE E , andC lG R E .
This book is 'lntended to m eet the needs of practicingindustry
engineers associated w iththe electric lltilit)r aS w ell aS those of gradate students and researchers.
Bookson this subjectare at least15 yeafsold;Sorne well-known booksare 30 to 40years old.ln the absence of a com prehensive text, COurSeS On PoW er system stallilit)r
xx i
-
xxii Preface
often tend to addressnarrow aspectsof the subject with em phasison special anlyticaltechniques. M oreover, both the teaching staff and students do not have ready aCCCSS
ttlinform ation on the practicalaspects.Sincethesubject requiresentering
an understanding of
a wide range ofareas,practicing engineers just thisfeld are faced with theform idable task of gathering the necessary inform ation from w idely scattered SOurCeS.
This book attem pts to 5 1l the gaP by providing the necessary fundam entals,explaining
developm ents
the practical aspects, and givingand
an integrated treatm ent of the latest*
111 m odelling teclm iques analyticalinform ation
tools. lt @IS divided into three
parts. Pa= I provides general
of
background *111 tANrtl chapters. C hapter 1
describes the structure m odern POW er system s and identif es different levels ofcontrol. C hapter 2 introduces the stability PrOblenA and provides basic concepts,
defnitions, and classis cation.Pa= 11 of the book, com prising C hapters 3 to 1 1, *IS devoted ttl equipm ent
characteristics and m odelling. System stability *IS affected by the characteristics of
every m ajor elem entof thepower system .A knowledge of the physicalcharacteristicsof the individual elem ents and their capabilities is essential for the understanding of
system
m athem aticalstability. The representation
@
IS
of these elem ents by DAeans of appropriatem odels critical to the analysis of stability. C hapters 3 to 10 arC
devoted to generators, excitation system s,prim e m overs, aC and dc transm ission, and
system loads.C hapter 11 describes the principles of active POW CC and reactive POW CCcontrol and develops m odels for the control equipm ent.
Part 111, com prising
stability.C hapters
is placed
12 to 17,considers different categories ofPoW er
of thesystem
stabilityEm phasis on physical understanding
Ahritll
of DRany facets
phenom ena. M ethods of analysis along control nAeasures for m itigationof stability PrOblenls are described @111 detail.
The notions of PoW er system stability and POW er system control are closelyrelated.The overallcontrols ill Jtpow er system are highly distributed in a hierarchical
structure. System
each
stability @IS strongly infuenced by these controls.ln chapter, the theory @IS developed from sim ple beginnings
situations.and *IS
gradually evolved SO that it Can be applied to com plex practical This *ISsupplem ented by a large num ber of illustrative exam ples. W herever appropriate,historical perspectives and past experiences are highlighted.
Because this @ISthe firstedition,it*ISlikely thatSonAe aspects ofthe subjectm ay nOt be adequately covered. It @IS also likely that there m ay be SonAe errors,typographicalfor
or otherw ise.l w elcom e feedback on such Crrors as w ellaS suggestionsim provem ents in the event that a second edition should be published.
1 am indebted to m any people w ho assisted m e in the preparation of this book.B aofu G ao and Sainath M oorty helped m e shritlz riany of the calculations and
com puter
C hisim ulations included in the book.K ip M orison,Solom on Y irga,M eir K lein,
T ang, and D eepa K undur also helped m e A'ritll SonAe of the results presented.
-
Preface ***XXIII
A tef M orched, K ip M orison, E rnie N eudorf, G raham R ogers, D avid W Ong,
H am id H am adanizadeh, B ehnam D anai, Saeed A rabi, and Lew R ubino review edvarious chapters of the book and provided valuabl com m ents.
D avid L ee review ed C hapters 8 and 9 and provided valuable com m ents and
suggestions.
num ber
'
J.have w orked Very closely sAritll M r. L ee for the last 22 years On aof com plex POW er system stability-related problem s', the results of our 'ointJ
effort arC reiected *111various pad / of the book.C arson T aylor review ed the m anuscript and providd m any helpful suggestions
for im proving the text.ln addition,nAany stillllllttilljM r.
discussions 1 have had AhritllM r.
Taylor,D r.C harles C oncordia, and w ith Y akout s4ansour helpedstability
m e develop a
better perspective
Patti
of current and future needs of POW er system analysis.
Scott and C hristine H ebscher edited the frst draft of the m anuscript.Janet
K ibblew hite edited the snal draft and suggested nAany im provem ents.l anx deeply indebted to L ei W ang and his Avife, X iaolu h4eng, for their
outstanding vvork in the preparation of the m anuscript,gratitude
including the illustrations.l w ish to take this opportunity $0 express m y to M r.PaulL . D andeno
for the encouragenAent he gave D C and the condence he show ed *111 m e during theearly part of m y career at O ntario
tltilit)pHydro.lt is because of him that Ijoiqed the electric
industry and then ventured illttl the DAany areas of PoW er system dynam ic
perform ance covered *111this book.l am grateful to the E lectric Pow er R esearch Institute for sponsoring this book.
ln particular,
and
l am thankful to D r. N ealB alu and M r.M ark L auby for their inspirationsupport. M ark L auby also review ed the m anuscript and provided nAany helpful
suggestions.
l w ish to CXPreSS m y appreciation to L iz D oherty and Patty Jones for helpingm e AAritll the correspondence and other business m atters related to this book.
Finally, l w ish to thank m y w ife,G eetha K undur,for her unfailing suppol and
patience during the DAany m onths l vvorkd On this book.
P rabha Shankar K undur
-
PA R T
G EN ER A LBA C K G R O U N D
-
eyr.m.eAi:rA.'.'vyevld. '1:.r.e*.4>..*4'#Y '*.Y#.x>v',*4'**yY#*',*+Y.##..#.*:.#ew.#.4es.,1.,#,*#*,#ew.4.#,A..#,#,e..e*e,e.#4,4,4*..A:4e,..#wy .#e.#1.:.e*44.,.e...4#.4#.1*#..e 4:.$: *.#i;. *..,4*:41-1. A. *4-4.+*.:y.p-*.:).y4 .4t.b.bi. :p1#,4..'iz4 *.:.:*.+1.4-, 1,+k). .*11*4..* .4+.#...*, *..y..:l#4!t* .4t. .1174,.4. .:-81, %.n$i'......)L).#4*:#.###-F#.#.#A#*'4e*#'# .b''6. 11aNz4..#>h#:1.+#.*.
.
'.!.*,.
#:*.
*4*,.
'.i:.
%4.+.*..,.... +w . .. 4-.'v3v.v.....vv. -#,*#:s:-i-..ry.... ,*-*-.z.-;.-;.*Ai-,$*
.
1.,.- - v.-4nw.4-..b....,$%....,.%v-.n%-v.. ..:.;.z,KA41...Ay#....zu...-..x ., .-. .. !4. *:is4#+#x#x..-*.-. ,k:.4&yAk-.
.v..4-.&..*.#1#1, ..-.4.'#,'.#....*A
.
#.
:#..
'..
-
:r.# ..: .*-. ...:..i. , -.. . . . .#.'i,-. .-.#*':'* * C hapter 1 exh.tuvwl ++%..+..+. z#.< - . w .*V.w#v. +%w . .>. . .. .
G eneral C haracteristicsof M odern Pow er S Ystenns
The PurPOSe of this introductory chapter is to provide a general description ofelectric pow ercharacteristics
system s beginningand
w ith a historical sketch of their evolution.The basicstructure of m odern POW er system s are then identifed. The
perform ance requirem ents of a properly designed pow er system and the various levelsof controls used to m eet these requirem ents are also described.
This chapter, together w ith the next, provides general background inform ationand lays the groundw ork for the rem ainder of the book.
1 1* EV O LU T IO N O F ELEC T R IC PO W ER S Y S T EM S
The com m ercial use of electricity began in th.
e late 1870s w hen arc lam ps w ereused for lighthouse illlzlllilllttit)ll and street lijlltillj.
Thefrstcomplete electric POWersystem (comprisingE dison
a generator, cable,fuse,m eter,
N ewand loads)
C ityW aS lltlilt by Thom as the historic Pearl Street Station @111
hrork w hich began operation @111 Septem ber 1882. This W aS a dc systemconsistingw ithin an
of aare a
steam -engine-drivenroughly 1.5 km in
generator supplying pow er to 59 custom ersradius. The load, w hich consisted entirely ofdc
incandescent lam ps, W aS supplied at 110 V through*h?itllill a few years sim ilar system s svere *111 Operatlon
an underground cable system .in m ost large cities throughoutSpraguethe developm ent of m otors by
w ere added to such system s. This w @s the begilm ingof the largest industries in the w orld.
w orld.W ith the Frank 41' ?-1l11884,nAotor loadsof w hat F ould
f
develop into One
pedro carvajalNota adhesivaesbozo
pedro carvajalNota adhesivasatisfacer
-
4 G eneralC haracteristics of M odern Pow er System s C ha p . 1
111 spite of the illititl w idespread uSe of dc system s,lim itations of dc
they SVCCC alm ostsuperseded by ac system s. B y 1886, the system s w ere
lncreasingly apparent. They could deliver pow er only a short distance from2 d voltage drops tothe generators
. To keep transm ission power losses (RI ) anacceptable levels, voltage levels had to be high for long-distance pow er transm ission.Such high voltages w ere not acceptable for generation and consum ption of pow er;therefore, a convenient m eans for voltage transform ation becam e a necessity.
The developm ent of the transform er and ac transm ission by L. G aulard andJ.D . G ibbs of Paris, France, 1ed to ac electric pow er system s. G eorge W estinghousesecured rights to these developm ents in the U nited States. ln 1886, W illiam Stanley,an associate of W estinghouse, developed and tested a com m ercially practicaltransform er and ac distribution system for 150 lam ps at G reat B arrington,M assachusetts.
com pletelybecom ing '
111 1889,the srst aC transm ission line in N orth A m erica w asoperation in O regontransm itting
betw een W illam ette Falls and Portland.lt w asput into
a single-phase line
POW erthe
at 4,000 V OVer a distance of 2 1 km .sritll developm ent of polyphase
B y
system s by N ikola T esla, the aC systemm otors,becam e Cven nAore attractive. 1888, T esla held several patents On aC
generators, transform ers, and transm issionttl these early inventions,
1890s,should
111and they
system s.
form ed the basisW estinghouse bought the patentsof the present-day aC system s.
the there W aS considerable controversy OVer w hether the electrictltilit)rbetw een
industry be standardized on dc or aC.There svere passionate argum entsE dison,w ho advocated dc,
hadand W estinghouse, w ho favoured aC.B y the turn
of the century, the aC system W On Out OVer the dc system for the follow ingrC a SO n S :
@ V oltageflellillilit)r
@
levels Can be easilydifferent
transform ed @111 aC system s, thus providing* @
thefor uSe of voltages for generation, transm lsslon, and
consum ptlon.
* A C generators are m uch sim pler than dc generators.
@ A C nlotors are m uch sim pler and cheaper than dc m otors.
T he rst2,300N iagara
V , 12
three-phase line inkm line in southern
N od h A m erica w ent illttl operation @111 1893 aC alifornia. A round this tim e, aC W aS chosen at
Falls because dc W aS n0t practical for transm itting POW Cr to B uffalo, about30 aW ay.This decision ended the ac versus dc controversy and established victoryfor the aC system .
In the early period of ac4anyproblem for interconnection.A m erica, although m any other
pow er transm ission, frequencyw ere in use: 25, 50, 60, 125, and
W aS not standardized.different frequencies 133 llz. This posed a
E ventually 60countries use
H z W aS adopted aS standard @111 N od h50 llz.
Thedistances
increasing needcreated an incentive
for transm itting larger am ounts of pow er over longerto use progressively higher voltage levels. The early ac Z
k
pedro carvajalResaltadoa pesar de
pedro carvajalResaltadoextendido
pedro carvajalResaltadoreemplazado
pedro carvajalResaltadollevar
pedro carvajalResaltadolleva a cabo o mantiene
pedro carvajalResaltados
pedro carvajalResaltadodefenda
pedro carvajalResaltadoal final de
pedro carvajalResaltadoen inicios del
pedro carvajalResaltadoaunque
pedro carvajalResaltadopor consiguiente, por lo tanto
pedro carvajalResaltadoasegur, obtuvo
pedro carvajalResaltadode la actualidad , de hoy, del presente
-
Sec. 1.2 Structure ofthe Pow erSystem 5
system skv in 1923, 287 kv inenergized its frst 735 kv
used 12,44,and V (RM S line-to-line). This1935, 330 kv in 1953, and 50060 k rose to 165 kv @111 1922,220
kv *111 1965.@
111 1966, and 765 kv W aS introduced @111Hydro Quebec
the U nited States*111 1969.
T o avoid the proliferation of an unlim ited num ber of voltages,the industry hasstandardized voltage levels.The standards are 1 15,
for the138, 161 and 230 kv for the5 high
classvoltage
f1,2J.developm ent of m ercury arc valves in the early 1950s, high voltage
dc (HVDC) transm ission system s becam e econom ical in special situations. The HVDCtransm ission is attractive for transm ission of large blocks of pow er over longdistances. The cross-over point beyond w hich dc transm ission m ay becom e acom petitive alternative to ac transm ission is around 500 km for overhead lines and 50km for underground or subm arine cables. H V D C transm ission also provides anasynchronous link betw een system s w here ac interconnection w ould be im practicalbecause of system stability considerations or because nom inal frequencies of thesystem s are different. The rst m odern com m ercial application of H V D C transm issionoccurred in 1954 w hen the Sw edish m ainland and the island of G otland w ere
and(HV)class,and 345,500 765 kv extra-high voltage (EHV)
W ith the
intercoM ected by a 96 subm arine cable.shritlz the advent of thyristor valve converters, H V D C transm ission becam e
Cven nXore attractive. The srst application of an H V D C system using thyristor valvesW aS at E el R iver @111 1972betw een the POW er system s
- a back-to-back schem e providing an
of Quebec and N ew Brunswick. W ithasynchronousthe
tiecost and size
of conversionsteady increase
equipm ent decreasing and its reliabilityin the use of H V D C transm ission.
increasing, there has been a
lnterconnection of neighbouring*
lltllitie s usually*
leads ttl im proved systemsecurity and econor;y of operatlon.
Cm ergencythe
assistance that the utilitiesIm proved securlty results from the m utualcan provide. Im proved econom y results from
need for less generating reserve capacity On each system .transfers
ln addition, theintercoM ection perm its the utilities to naake Cconom y and thus takeadvantagerecognizedtltilitie s
of the m ost econom ical SOurCeS of POW er.*
These benests have beenfrom the beginning and interconnections contlnue
kN
to grosv.A lm ost a11 thein the U nited States and C anada are nOw part of one interconnected system .
suchThe result is a Very largeoperation
system of enorm ous com plexity. The design of asystem and its Secure are indeed challenging PrOblem s.
1.2 S T R U C T U R E O F T H E PO W ER S Y S T EM
E lectrica11have the
pow er system s varysam e basic characteristics'.
in size and structural com ponents.H ow ever,they
@ A re com prised of three-phase aC system s operating essentiallythree-phase
at con stant
voltage. G eneration and transm ission facilities uSe equipm ent.
pedro carvajalResaltadoelevarse subir
pedro carvajalResaltadopara evitar
pedro carvajalResaltadomas all de
pedro carvajalResaltado
pedro carvajalResaltadovlvula compuerta
pedro carvajalResaltadode hecho verdaderamente
pedro carvajalResaltadodesafiante
pedro carvajalResaltadosin embargo
pedro carvajalResaltadocomprendido
pedro carvajalResaltadofirme continuo sostenido
pedro carvajalResaltadofiabilida, confiabilidad
pedro carvajalResaltadocasi
-
6 G eneralC haracteristics of M odern Pow er System s C ha P . 1
Industrial loads are invariably three-phase; single-phase residential andcom m ercial loads are distributed equally am ong the phases so as to effectivelyform a balanced three-phase system .
@ U se synchronous@
Prlm ary
nAachines for generation of electricity. Prim e m overs conved
the SOUrCCS ofenergy (fossil,nuclear,to
and hydraulic) to m echanicalenergygenerators.
that *1S, @111 turn, convel ed electrical energy by synchronous
@ Transm it pow er over signis cant distancesarea. This requires a transm ission systemdifferent
to Consum ers spread OVer a w idecom prising subsystem s operating at
voltage levels.
Figureis produced
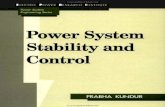
1.1 illustrates the basic elem ents of a m odern POW CF system . E lectric
PoW era com plex
at generating stationsnetw ork of individual
(GS)and transm itted to Consum erscom ponents, including transm ission
throughlines,
transform ers, and sw itching@
devices.It is com m on practlce to classify the transm ission netw ork illttl the follow ing
subsystem s:
1. Transm ission system
2. Subtransm ission system
3. D istribution system
The transm ission system intercoM ects a11 *m alorof theload centres in the system .It form s the backbone
generating stations and m ainintegrated pow er system and
Operatesvoltages aretransm ission
theat highestvoltage levels (typically,230 kv and above).The generatorusuallyvoltage
@
111 the range of 11 to 35 kV . These arClevel,and PoW er is transm itted to transm ission
stepped up to thesubstations w here
the voltages
kV).Theare stepped dow n to the
generation and transm issionsubtransm ission level(typically,69 kv to 138subsystem s are often referred to aS the bulk
# OW er system .The subtransm ission system transm its
transm ission substations to the distributionpow er
substations.
*
111 sm aller quantities@
from theLarge industrlal custom ers are
com m only supplied directly from the subtransm issionis no clear dem arcation betw een subtransm ission and
system .ln son:e system s,theretransm ission circuits. A s the
system
older transm issionexpands and higher voltage
oftenlevels beconae nCCCSSarY for transm ission, the
lines are relegated to subtransm ission function.The distribution system represents the snal stage *111 the transfer of PoW er to
the individualand 34.5
custom ers. The prim ary distribution voltage is typically betw eenkV . Sm all industrial custom ers are supplied by prim ary feeders
4.0 kVat this
voltageG level.The secondary distribution feeders supply residential and conlnlercialcustom ers at 120/240 V .
pedro carvajalResaltadoexpandirse, extenderse
pedro carvajalResaltadoa travs
pedro carvajalResaltadomayor, ms grande
pedro carvajalResaltadocolumna vertebral
pedro carvajalResaltado
pedro carvajalResaltadoelevar
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltadobajar, reducir
pedro carvajalResaltadoparte principal, volumen
pedro carvajalResaltadorelegado
pedro carvajalResaltadopara
pedro carvajalResaltadoa su vez
pedro carvajalResaltadocomprendiendo
pedro carvajalResaltadointerruptor
-
Sec. 1.2 Structure of the Pow er System 7
G S
22 W
500 W 500 kv a?p kv
G S G S
20 kv 24 kv
T ie line toneighbouringsystem i
I j jonI Transm ssTransm ission system (230 kV)
system T ie line500 kV) 230 kv l( .
! 345 kv
500 kvTransm ission To subtransm ission and dlkstributionbsttion Y ulkSu
PoW er System115 kv
Subtransm ission Subtransm issionand
distributionlndustrial systemstom er lndustrialcu
custom er115 kv
D istributionsubstation
12.47 kv 3-phase prim alfeder
D istributiontransform erS
m all ja;/a4; vG S Si
ngle-phaseC om m ercial secondry feeder
R esidential
F igute 1.1 B asic ele> ents of a PoW er system
pedro carvajalResaltado
-
8 G eneralC haracteristics of M odern Pow er System s C haP . 1
Sm all generating plants located near the load are often coM ected to thesubtransm ission Or distribution
lnterconnections tosystem
neighbouringdirectly.
PoW er system s are usually form ed at thetransm ission system level.
The overall system thus consistslayers of transm issionthat enables
netw orks.of m ultiple generating
This provides a high degree ofSOUCCCS and several
structural redundancythe system to w ithstand unusual contingencies w ithout service disruption
to the Consum ers.
1.3 PO W ER S Y S T EM C O N T R O L
The function of an electricnaturallyconsum ption.
available fornls to thepow erelectrical
system is to convel energy from one of theform and to transport it to the points
@
IS
ofEnergy *IS seldom consunaed @111 the electrical form but rather
to as energy. advantageof the electrical form of energy is that it can be transported and controlled w ithrelative ease and w ith a high degree of eff ciency and reliability. A properly designedand
convel ed other fornls such heat,light, and m echanical The
operated PoW er system should, therefore, m eet the follow ing fundam entalrequirem ents..
1. The system m ust be able to m eet the continually changing load dem and foractive and reactive POW er.U nlike other types
quantities.of energy, electricity
adequatecannot be
conveniently stored @111 sufs cient Therefore,bereserve of active and reactive PoW er should m aintained and
Etspinning''appropriately
controlled at a11 *tlm es.
2. The system should supply energy at m inim um cost and Ahritll m inim umecological lm pact.
3. The
-
>eC. 1.3 Pow er System C ontrol
G eneratorFrequency T ie Gow s pow er
System G eneration C ontrolSchedule L oad frequency control w ith
econom ic allocation
Supplem entarycontrol
j-- jG enerating jl prjm e j
=I U nit C ontrolsI m Over l XQI and lI j I .Tcontro
I aIl I > a! shaft j x a1
pow er l .: :I l % oI l : ol E
xcitation l x =l F ield l Ox 2: system o eserator l
.QI and cua en l t ool I
ll control l o 4,l I
l V oltagoe Speed ll I
I s eedmower II pE lectricalpow er
T ransm ission C ontrolsR eactiv pow er and voltage control,
H V D C transm ission and associated controls
Frequency T ie G eneratorGow s pow er
F igure 1.2 Subsystem s of a POW er system and associated ontrols
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
-
10 G eneralC haracteristics of M odern Pow er System s C ha p . 1
excitation control is to regulate generator voltage and reactive pow er output. Thedesired M W outputs of the individual generating units are determ ined by the system -generation control.
The prim ary PurPOSe of the system -generation control @IS to balance the totalsystem against system load and losses so that the
power interchange with neighbouring system s (tie fows) isThe transm ission controls include pow er and voltage
static
generation desired frequency andm aintaind.control devices, such as
var com pensators, synchronous condensers, sw itched capacitorstap-changing transform ers, phase-shifting transform ers, and H V D Ccontrols.
and reactors,transm ission
The controls described above contribute to the satisfactoryfrequency
operation of the
PoW ervariables
system by m aintaining system voltages and and other systemNhritllirl their acceptable @ @llm lts. They
of the PoW er systemalso hve a profound effect on theand on its ability to cope w ithdynam ic perform ance
disturbances.The control
system .
possiblecondition
U nderobjectives are
norm al conditions,voltages
dependent On Operating State Of the pow er
Objective is to Operate as effciently asthe
the controlNh?itll anddevelops, neW
frequency close to nom inal values.
objectives must be m et to restore theW hen an abnorm alsystem to norm al
operation.
M ajorsystem failuresare rarely the resultof asingle catastrophic disturbancecausingabout by a com bination
collapse of an apparentlyof circum stances
Secure system . Such failures are usually broughtthat stress the netw ork beyond its capability.
Severe natural disturbances (such aS a tornado,inadequate
Severe storm , Or freezingto
rain),equipm entpow er system and eventually lead tooutages that m ust be contained w ithinis to be prevented.
m alfunction, hum an error,and designThis
com bine w eaken the'
x
its breakdow n. m ay result @111 cascadinga sm allPa= of the system if a *m alof blackout
Operating states of a powtr system and controlstrategies JZ V
For PUCPOSCS of analyzing PoW er system security and designing appropriatecontrol system s, it is helpful to conceptually
norm al,classifyi'l
theillttl lve states : alert, em ergency, extrem is,
w hich
system -operatingand restorative.
conditionsFigureplace
1.3depicts these operating states and the W ays *111 transition Can take fromOne state ttl another.
ln the norm al state, all systemThe
variables are Al?itllill the norm al range and noequipm entto
is beinga contingency
overloaded. system operates @11l a Secure m alm er and is. ablew ithstand violating
The system enters the alert state if thew ithout any
securityof the constraints.
level falls below a certain lim itof adequacy, Or if the possibility of a disturbance increases because of adversew eather conditions such aS the approach
acceptableyveakened
variablesof SCVCCC storm s. l11 this state, a11 system
are still An?itllill the range and a1l constraints are satisf ed.H ow ever, the system has been to a level w here a contingency m ay Cause
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltadocapacidad de hacer frente
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltadocae
pedro carvajalResaltadoha sido debilitado a
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltadobring about: efectuar, causar, lograr,
pedro carvajalResaltadosuficiencia
-
Sec. 1.3 Pow er System C ontrol 11j
N orm al
R estorative A lert
In extrem is E m ergency
F igure 1.3 Pow er system operating states
an overloading of equipm ent that places the systemextrem e
@
111 an enAergency state. If thedisturbance *IS Very
theSevere,the i'3extremis (or em ergency) state m ay result
directly from alert state.Preventive action, such aS generation sllifting
the(security dispatch)
lf theOr increased
re serv e y
docan be taken to restore the system to norm al state. restorative steps
n0t succeed,The
the systementers
rem ains @111 the alert state.system the em ergency state if a sufs ciently Severe disturbance
OCCUFS w hen the system @IS *111the alert state.In this state,voltages*
at m any buses are1()AA?and/or equipm ent loadings exceed short-term Cm ergency ratlngs.The system *IS
m ay be restored to the alert state by theactions: fault clearing, excitation control, fast-valving,run-back, H V D C m odulation, and load curtailm ent.
stillintact and initiating of em ergency* @ @
controlgeneratlon trlpplng,generation
lf the above DACaSUrCS are not applied Or are ineffective, the system @IS
extremis; result is cascading outages and possibly a shut-down of a m ajor portionof the system . C ontrol actions, such as load shedding and controlled systemseparation, are aim ed at saving as m uch of the system as pojsible from a w idespreadblackout.
the
The restorative statetaken to recoM ect a11 the
represents afacilities and
condition @111 w hich control action *ISto restore system load. The system
beingtransits
from this state to either the alert state Or the norm al state, depending on the systemconditions.
C haracterization of the system conditions irlttl the f ve states aS describedabove provides a fram ew ork in w hich control strategiesactions identifed to deal effectively w ith each state.
can be developed and operator
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltadoAll system variables are within the normal range and no equipment is being overloaded.The system operates in a secure manner and is able to withstand a contingency without violating any of the constraints
pedro carvajalResaltadoThe system enters the alert state if the security levels falls below a certain limit of adequacy, or if the possibility of a disturbance increases because of adverse weather conditions such as the approach of several storms. In this state, all system variables are still within the acceptable range and all constraints are satisfied. However, the system has been weakened to a level where a contingency may cause an overloading of equipment that places the system in emergency state.If the disturbance is very severe, the in extremis (or extreme emergency) state may result directly from alert state.
Preventive action, such as generation shifting the (security dispatch) or increased reserve, can be taken to restore the system to norm al state. If the restorative steps do not succeed, the system remains in the alert state
pedro carvajalResaltadoThe system enters the emergency state if a sufficiently severe disturbance occurs when the system is in the alert state. In this state, voltages at many buses are low and/or equipment loadings exceed short-term emergency ratings. The system is still intact and may be restored to the alert state by the initiating of emergency control actions: fault clearing, excitation control, fast-valving, generatlon tripping, generation run-back, HVDC modulation, and load curtailment
pedro carvajalResaltado
If the above measures are not applied or are ineffective, the system is in extremis; the result is cascading outages and possibly a shut-down of a major portion of the system. Control actions, such as load shedding and controlled system separation, are aimed at saving as much of the system as possible from a widespread blackout.
pedro carvajalResaltadoThe restorative state represents a condition in which control action is being taken to reconnect all the facilities and to restore system load. The system transits from this state to either the alert state or the normal state, depending on the system conditions.
pedro carvajalResaltadoextendido.
pedro carvajalResaltado
pedro carvajalResaltadoarmazn, esqueleto,
pedro carvajalResaltadoparos, apagones
pedro carvajalResaltadocada
pedro carvajalResaltadorechazo
pedro carvajalResaltadodirigi, encarar
pedro carvajalResaltadotanto como sea posible el sistema
pedro carvajalResaltadocualquier, o, ambos, cualquiera de los dos,
pedro carvajalResaltadoto deal with: tratar con, tratar de, ocuparse en,
-
12 G eneralC haracteristics of M odern Pow er System s C hap . 1
For a system that has been disturbed and that has entered a degraded operatingstate, POW CC
lf thesystem
disturbancecontrols assist the Operator *111 returning the system to a norm al
state.
to achieve this task.sm all, pow er system
H ow ever, if the disturbance
*
IS controls@
IS
by them selves m ayit is possible that
be able
actions such aS generation rescheduling Or elem entlarge,sw itching
Operatorm ay be required for a
return ttlthe norm al state.The philosophy
@
that has evolved to COPe AAritll the diverse requirem ents ofsystem control COm Pr1SeS a hierarchial structure aS shou @111 Figure 1.4. ln thisstructure,
as excitation system s, prim e m overs, boilers, transform er tap changers, and dcconverters. There is usually som e form of overall plant controller that coordinates thecontrols of closely linked elem ents. The plant controllers are in turn supervised bysystem controllers at the operating centre. The system -controller actions are
there are controllers operating directly on individual system elem ents such7
coordinated by pool-level m aster controllers. The overall control system is thus highlydistributed, and relies on m any different types of telem etering and control signals.
Supervisory Control and Data Acquisition (SCADA) system s provide inform ation toindicate the system status. State estim ation program s data and providean accurate picture of the system 's condition. The hum an operator is an im portant link
slter m onitored
at various levels @111 this controlprim ary function of the
hierarchyoperator is toeconom ic
and at keysystem
locations On the system .and
Them onitor perform ance DAanage
qualityresources SO aS to ensure operation w hile m aintaining the required
Pool control centre
To other system s system control centre Y 0 Other system s
Transm ission plant Pow er plant
D istribution centres G enerating units
F igure 1.4 Pow er system control hierarchy
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltadocubrir
-
Sec. 1.4 D esign and O eratin.h
9 C riteria f o r Stability 13
and reliability ofPOW er supply.role by
*
coordinating*
relatedcorrectlve strategles ttl restore
D uring systel em ergencies, the operator plays a keyinform ation from diverse sources and developingthe system to a m ore secure state of operation
.
1.4 D ES IG N A N D O PERA T IN G C R IT ER IA FO R S TA B ILIT Y
For reliable service, a bulk electricity system m ust rem ain intact and becapablethe system be designed and operated so that the m ore probable contingencies can be
sustained with no loss of load (except that connected to the faulted elem ent) and sothat the m ost adverse possible contingencies do not result in uncontrolled
, w idespread
and cascading pow er interruptions.The N ovem ber 1965 blackout in the northeastern part of the U nited States and
O ntario had a profound im pact on the electric utility industry, particularly in N orth
A m erica. M any questions w ere raised relating to design concepts and planningcriteria. These 1ed to the form ation of the N ational E lectric R eliability C ouncil in1968. The nam e w as later changed to the N orth A m erican E lectric R eliability C ouncil
(NERC). 1ts purpose is to augm ent the reliability and adequacy of bulk power supplyin the electricity system s of N orth A m erica. N ER C is com posed of nine regionalreliability councils and encom passes virtually a11 the pow er system s in the U nitedStates and C anada. R eliability criteria for system design and operation have beenestablished by each regional council. Since differences exist in geography
, load
pattern, and power sources, criteria for the various regions differ to som e extent g5).Design and operating criteria play an essential role in prevenying m ajor system
dijturbances follow ing severe contingencies. The use of criteria ensures that, for all
frequently occurring contingencies, the system w ill, at w orst, transit from the norm al
of w ithstanding a w ide variety of disturbances. Therefore, it is essential that
state to the alert state,tather than to a nAore Severe state such aS the em ergency stateOr the extrem is state. W hen the alert state *IS entered follow ing a contingency
,
Operators Can take actions to return the system to the norm al state.
The follow ing exam ple of design and operating criteria related to system
Coordinating Council (NPCC) g6).lt does not attem pt to provide an exact reproduction of the N PC C criteria but givesan indication of the types of contingencies considered for stability assessm ent
.
stallilit)r is based on those of the N ortheast Pow er
N orm al design contingencies
'>
The criteria require that the stability of the bulkduringto reclosingsigniscant
and after the m ost Severe of the contingenciespow er
specif edsystem be m aintainedbelow ,basis
w ith due regardthatfacilities. These contingencies
*
are selected on the they
com prisinghave a
probabilitysystem .
norm al
theof occurrence glven the large num ber of elem ents
PoW erThe design contingencies include the follow ing'
.
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltadoen vez de a un
pedro carvajalResaltadosin menoscabo de
-
14 G eneralC haracteristics of M odern Pow er System s C ha p . 1
(a) A perm anent three-phasetransform er or bus section,reclosing
fault Onw ith norm al
any generator,fault clearing and
transm ission circuit,w ith due regard to
facilities.
(b) Sim ultaneousperm anent phase-to-groundtransm ission circuits on
faults on different phases of eacha m ultiple-circuit tow er, cleared
of
two adjacentnorm al tim e.
@
111
(c) A perm anent phase-to-ground fault on any transm ission circuit, transform er,or bus section w ith delayed clearing because of m alfunction of circuit breakers,relay, Or signal channel.
(d) Lossofany elem entwithouta fault.
(e) A perm anent phase-to-ground fault On a circuit breaker,cleared *111norm altim e.
(f) Simultaneous perm anentlossof both polesof a dcbipolarfacility.
The criteria rzquire that, follow ing any of the above contingencies, the stability of thesystem
applicablebe m aintained,
lim its.and voltages and line and equipm ent loadings be Ahritllirl
These requirem ents apply to the follow ing tAA?tl basic conditions'.
(1) A11facilities @111service.
(2) A critical generator, transm ission circuit,and
Or transform er Out of service,
betweenassum ing that the area generation POWer Pows are adjustedoutages by uSe of ten m inute CCSCrVC.
E xtrem e contingency assessnlent
The extrem e
PoW ercontingencies.
system Can
contingency
be subjectedobjective is to
in order to
assessm ent recognizesto events that exceed in
that the interconnected bulkseverity the norm al design
The determ ine the effects of extrem e contingenciesstrengththough
perform anceO n
system
determ ineobtain an indication of system and to
the extent of a yvidespread1()A4?contingencies
assessnAent
do have Verycontingencies,
system
probabilities ofdisturbance Cven extrem eOCCurrCnCe. A ftir an analylis
appropriatrcand
of extrem e nxeasures are to be utilized, w hereto reduce the frequency of OCCurrenCC of such contingencies Or to m itigate theConsequences that are indicated aS a result of sim ulating
the follow ing:for such contingencies.
The extrem e contingencies include
(a) Loss of the entire capability of a generating station.
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltadoimposicin
pedro carvajalResaltadomagnitud
pedro carvajalResaltadoextenso, esparcido
pedro carvajalResaltado
pedro carvajalResaltadoan cuando
-
Sec. 1.4 D esign and O Peratin9 C riteria for Stability 15
(b) Loss of a1llines em anating from a generating station,switching station Orsubstation.
(c) Loss of a11transm ission circuits On a COnUnOn right-of-way.
(d) A perm anent three-phase fault On any generator, transm ission circuit,transform er,reclosing
or bus section,w ith delayed fault clearing and w ith due regard ttlfacilities.
(e) The sudden dropping of a large-load 0rm ajor-load centre.
(f) The effectof severePOWerswingsarising from disturbances outside the NPCCinterconnected system s.
(g) Failure or m isoperation of arejection, load rejection, or special protection system , such astransm ission cross-tripping schem e.
a generation
System design for stabilip
The design*
of a large interconnectedm inim um cost ls a very com plex prbblem .The
system to ensure operation ateconom ic gains to be realized through
stable
the solution to this problem*
Very
are enorm ous. Frona a control theoryoperating
point@
f vi'ewO , the
pow erchanging
system@
is a hlgh-orderB ecause
m ultivariableenvlronm ent. of the high
PrOCCSS,dim ensionalityassum ptionssystem
isand
ln a constantlycom plexity of the
system , it essential to naake
PrOgood graspindividual
blenAs using the rightcharacteristics
degreesim plifyingof detail of
to analyze specis crepresentation. This requires a
and
of the of the overall system aS w ell aS of those of itselem ents.
The PoW er@
IS iniuenced bySystem
system
a w ide
@
IS a highly nonlineararray of devices
system
w ithw hose dynam ic perform ance
different reSPOnSe rates andcharacteristics. stability m ust be view edterm s of its different aspects.The next chapter
not as a single problem , but rather indescribes the different form s of pow er
system stabilityC haracteristics
blem s.PrO
effect On systemof virtually every m ajor elem ent of the power
stability. A know ledge of thege characteristics issystem have anessential for the
understandingcharacteristicsaspectsspecialpresented
of varlous
andand
study ofm odelling w ill
pow er systembe discussed in Part
stability. Therefore, equipm entII.Intricacies of the physical
analysis, andnAeasurs
categoris of the system stability, m ethods of theirfor enhancing stability perform ance of the pow er system111.
w ill bein Part
pedro carvajalResaltado
pedro carvajalResaltadosalen, brotan
pedro carvajalResaltadoderecho de paso o va,
pedro carvajalResaltadosurgidas, levantndose
pedro carvajalResaltadoerror de operacin
pedro carvajalResaltadosino
pedro carvajalResaltadomejorar
pedro carvajalResaltadocomplejidades
-
16 G eneralC haracteristics of M odern Pow er System s C haP . 1
R EFER EN C ES
(1) H .M .Rustebakke (editor),Electric Utility Systems and Practices,Jolm W iley& Sons, 1983.
(21 C.A .Gross,Power System Analysis, Second Edition, John W iley & Sons,1986.
(31 L.H . Fink and K . Carlsen,M arch
(to perating under Stress and Strain '' IE E ESp ectrum , PP.48-53, 1978.
g41 EPRI Report EL 6360-L, ttDynam ics of lnterconnected PowerT utorial for System D ispatchers and Plant O perators,
lnc.,
55 FinalSystem s: A
Report of Project2473-15,prepared by Pow er T echnologies M ay 1989.
(51 IEEE Special Publication 77 CH 1221-1-PW R, Symposium On ReliabilityCriteria for System Dynamic Performance, 1977.
(61 Northeast Power Coordinating Council, (tgasjc Criteria forO peration of lntercoM ected Pow er System s,55 O ctober 26, 1990
D esign andrevision.
-
+ v ygp +' wTwr ' v F4tw'+Y *' * ' v ' kw'r '%* ' Y' +' *+* * *' * ' 4T v v ' v 'v v v '* Yi * +' * v' Ykw' +' + .w6+' *' *' ' + *' '* ' * *=* * * * *' *' * ' '+ ' '+ ' 6+ v , ' ' ' # '+' '+ += +'' *' + Y' ' Y' *'' *' 'v v' v +' '- -,evw-A1'.',..-w>4##,....*.4.v##'..
,+#+,Aw.,#..
.
.
*.h:!#1#..+*.
.
wN.
.
:.y>.,.1;.#.L*.#D* 424&.Vx#.2......wez'>...v.*?.p..4..*.
. .
.it.-i..
447!44'...-;.*
.
-.- .-i-
A$'..
.
:. 4 -.1t. ... !l
-
ki###. ., ... .4.
, . ;ti. t;.
, -,. u . 1 .
.
. . . 111.. liz . . 1*!.!.....1.
#i;k.#.,
)t#.$..i.
.
. tll''.'.* . .. ..##:... 4.e. .
.y.,..,.-.
.
x..-...
.,:;*#..
z.x..,:.1i.-.-. . ..:.-
j,k.:i- ..-..*.4-. . 141.; ..'qv4%.. .. . -. -.:: . -i .4 . . . .'*% % .%'v w ,.
4...,4 .. . .
, , . .., . . . . . . . .
...,.,w,v . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .%%%x ew .w ,..* , .> + C hapter 2 j#!e *#v+v' f***'*'v'#r%TeTf*4%* Nv v%%% x , wA##, Av. *#e4ow.ss*r..m*#>**X+.*.*2+##.+.>,e*-* *.*-*=* -*' WW
Introd uctio n to thePow er S Ystenn S tability Problem
This chapter presents a general introduction to the POW CC systemof related
stabilityproblemA nalysis of elem entaryillustrates som e of the
including physical concepts, classis cation,conf gurations
and denition ternls.POW er system by nAeans of idealized m odels
stability proped ies of pow er system s. ln addition,a historical review of the em ergence of different form s of stability problem s as pow ersystem s evolved and of the developm ents in the associated m ethods of analysis is
presented. The objective is to provide an overview of the power system stabilityphenom ena and to 1ay a foundation based on relatively sim ple physical reasoning.
This will help prepare for a detailed treatm ent of the various aspects of the subject insubsequent
fundam ental
chapters.
2 .1 BA S IC C O N C EPT S A N D D EFIN IT IO N S
P ow er
system
operating
subjected
thatsystem
enables itstabilisto
conditions and
m ay as property pow errem ain in a state of operating equilibrium under norm alto regain an acceptable state of equilibrium after being
be broadly defned that of a
to a disturbance.Instability in a pow er system m ay
depending on the system cons guration andproblem has been One of m aintaining
m any w aysoperating m ode. Traditionally, the stability
synck onous operation. Since pow er system s
be m anifested @111 different
17
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltadoampliamente,
pedro carvajalResaltadohabilita
pedro carvajalResaltadorecuperar
pedro carvajalResaltadoya que, desde que, puesto que
-
18 lntrod uction to the Pow er System Stabil.ity Problem C haP . 2
rely on synchronous m achines for generation of electrical pow er, a necessarycondition for satisfactory system operation is that a11 synchronous m achines rem ainin synchronism or, colloquially, GEin step.'' This aspect of stability is infuenced by thedynam ics generator rotor pow er-angle
Instability m ay also be encountered w ithout lossof angles and relationships.
a system
throughvoltage.
consisting ofa transm ission
a synchronous generatorof synchronism . For exam ple,
feeding an induction m otor loadline Can beconae unstable because of the collapse
@
of loadM aintenance of synchronism @IS nOt an issue ill this instance; lnstead, the
Concern @IS stability@loads Coverlng an
and control of voltage. This form of instabilityextensive area supplied by a large system .
Can also OCCUF *111
In the evaluation of stabilit)rthe Concern is the behaviour of the PoW er systemw henSm all
subjecteddisturbances
fO a transient disturbance. The disturbance m ay be sm all Or large.form of load changes take place continually, and the system
adjusts itself to the changing conditions. The system m ust be able to operatesatisfactorily under these conditions and successfully supply the m axim um am ount ofload. lt m ust also be capable of surviving num erous disturbances of a severe nature,such as a short-circuit on a transm ission line, loss of a large generator or load, or lossof a tie betw een tw o subsystem s. The system response to a disturbance involves m uchof the
in the
equipm ent. For exam ple,relays
a short-circuit On a critical elem ent follow ed by itsisolation by protective
busAhrill CaUSC variations *111POW Cr
*
transfers, m achine rotorspeeds, andtransm ission
voltages; the voltage variations A,;11l actuate both genertor@
andsystem voltag regulators;the speed variations Alrillactuate Prlm e m over
governors; generation controls; the changesin voltage and frequency w ill affect loads on the system in varying degrees dependingon their individual characteristics. In addition, devices used to protect individualequipm entperform ance.
the change in tie line loadings m ay actuate
m ay respondany given
to variations @111 system variables and thus affect the system111 situation,how ever,the CCSPOnSCS
@
of only a lim ited am ountof equipm ent m ay be signis cant. Therefore,sim plify the problem and to focus on factorsproblem .classi cation
T he
m any assum ptlons areiniuencing the specif c
usually naade to
*
IS greatlytype
facilitatedof stability
understanding of stability problem sof stability into various categories.
by the
The follow ing sections w ill explore different form s of pow er system instabilityand associated concepts by considering, w here appropriate, sim ple pow er systemconf gurations. A nalysis of such system s using idealized m odels w ill help identify
X
fundam ental properties of each form of stability problem .
2 .1.1 R otor A ngle Stability
R otor
a PoW erof the electrom echanical
angle stability is the ability of interconnected synchronoussystem to rem ain in synchronism . The stability problem involves
naachines of .the study
factoroscillations inherent *111PoW er system s.A fundam ental*
111 this problemas their
@
IS the m anner @111 w hich
Varycharacteristics
rotors oscillate. Apow er
brief . discussionthe outputs of synchronous nAachines
of synchTonous m achine*
IS helpful aS a first step in developing the related basic concepts.
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltado
pedro carvajalResaltadocontar con
pedro carvajalResaltadoencontrada
pedro carvajalResaltadoproblema
pedro carvajalResaltadoen cambio
pedro carvajalResaltadopreocupacin, inters
pedro carvajalResaltado
-
Sec. 2 .1 Basic C oncepts and D efinitions 19
Synchronous m achine characteristics
The characteristics and m odelling of synchronous rnachines w ill be covered @111considerablecharacteristics
A synchronous m achine has tw o essential elem ents: the f eld and the arm ature.N orm ally, the feld is on the rotor and the arm ature is on the stator. The feld w inding
is excited by direct current. W hen the rotor is driven by a prim e m over (turbine), therotating m agnetic feld of the seld w inding induces alternating voltages in the three-phase arm ature w indings of the stator. The frequency of the induced alternatingvoltages and of the resulting currents that ;ow in the stator w indings w hen a load isconnected depends on the speed of the rotor. The frequency of the stator electricalquantities is thus synchronized w ith the rotor m echanical speed: hence the designation(dsynchronous m achine.''
W hen tw o or m ore synchronous m achines are interconnected, the statorvoltages and currents of a11 the m achines m ust have the sam e frequency and the rotorm echanical speed of each is synchronized to this frequency. Therefore, the rotors ofa11 interconnected synck onous m achines m ust be in synchronism .
The physical arrangem ent (spatial distribution) of the stator arm ature windingsis such that the tim e-varying alternatiqg currents i ow ing in the three-phase w indingsproduce a rotating m agnetic feld that, under steady-state operation, rotates at the sam e
speed as the rotor (see Chapter 3, Section 3.1.3). The stator and rotor selds react with
detail @111 C hapters 7=n 4, and 5.llere discussion @IS lim ited to the basicassociated w ith synchronous operation.
an torque tw oto align them selves. In a generator, this electrom agnetic torque opposes rotation of therotor, so that m echanical torque m ust be applied by the prim e m over to sustain
rotation. The electrical torque (or power) output of the generator is changed pnly bychanging the m echanical torque input by the prim e m over. The effect of inzreasingthe m echanical torque input is to advance the rotor to a new position relative to therevolving m agnetic Seld of the stator. C onversely, a reduction of m echanical torqueor pow er input w ill retard the rotor position. U nder steady-state operating conditions,the rotor eld and the revolving Seld of the stator have the sam e speed
. H ow ever,
there is an angular separation between them depending on the electrical torque (orpower)
each other and electrom agnetic results from the tendency of the S elds
outputln
of the generator.a synchronous m otor, the roles of electrical and m echanical torques are
reversedrotation
com pared to thosew hile m echanical
*
11l a generator. The electrom agnetic torque sustainsload OPPOSCS
@
rotation. The effect ofm echanical load *IS to retard the rotor posltion w ith respect to the
increasingrevolving f eld
theof
the stator.
ln the above discussion, the ternls torque and # OW er have been usedinterchangeably. This is com m on practice in the pow er systemsince the average rotational velocity of the m achines is constant
stabilit)?though
literature,Cven there
m ayunit values
be sm all nAonlentary excursions above and below synchronous speed. The Per
of torque and POW er are, *111 factj Very nearly equal.
-
20 Introduction to the Pow er System Stability Problem C ha P . 2
Power lvrsllf angle relationsh
A n im pod antrelationship betw een
characteristic that has a bearingand
On PoW er system stabilitythe
is theinterchange POW er angular positions of rotors of
synchronousconsider the
m achines. This relationshipshow n
*
IS highly nonlinear. T o illustrate this 1et USsim ple system
byand
naachines
@
111
connected a transm issionFigure 2.1(a).line having
It consists of tw o synchronousan inductive reactance X z but
negligiblegenerator
resistance capacitance. L et US aSSUDAC that m achine 1 represents afeeding PoW er
transferredto a synchronous
from thenAotor represented by
*
m achine 2.The POW er
() betweengenerator to the m otor ls a function of angular
separationto
the rotors of the tw o m achines.three com ponents: generator
f eldinternalangle c (angle
This angularby w hich the
separation is duegenerator rotor
leads the revolvingvoltagesleads that of the
of the generator
m otorl;
angular difference betw een the term inal
and m otor (angle by which the stator feld of the generatorand the internal angle of the m otor (angle by which the rotorfeld).
of the statorl;
lags revolving statorbe used to determ ine the
the Figure 2.1(b)shows a m odelof the system thatCanPOW Cr Versus angle relationship.A sim ple m odel com prising
an internal voltage behind an effective reactance is used to represent each synchronousm achine. The value of the m achine reactance used depends on the purpose of thestudy. For analysis of steady-state perform ance, it is appropriate to use thesynchronous reactancebasis for such a m odel
w ith the internal voltage@ @ '
equalassociated
theto excitation voltage.presented
Theand the approxlm atlons w ith it are *111
C hapter 3.A phasor diagranA identifying the relationships betw een generator
theand nAotor
voltages *ISshown @111Figure 2.1(c).The PoWertransferred from generator to thenzotor *IS given by
# X EMsin (2. 1)X v
w here
X v X +X +XG L M
The correspondingsom ew hat
PoW er Versus angle relationship @IS plotted in Figurethe idealized m odels used synchronous
2.1(d). W ithm achines, the
PoW eraccurate
varies aS a sine of thefor representing the
angle: a highly nonlinear relationship. s?itll nlorem achine m odels including
anglethe effects of autom atic voltage regulators, the
variation *111 PoW erhow ever,
w ith w ould deviaterelationship; the general form w ould be
signif cantly from thesim ilar. W hen the angle
sinusoidal@
IS Z ero , n O
POW er*
m a x lm u m .
*
IS transferred. A s the angle *IS increased, theA fter a certain angle,nom inally 90O5
pow era further '
transfer increases UP to alncrease @111 angle results *1T1
a decrease @111PoW er transferred.There is thus a m axim um steady-stateof the
PoW er@
that canbe transm itted betw een the tAArtl m achines. The m agnitude m axlm um POW CC @IS
pedro carvajalResaltado
pedro carvajalResaltado
-
Sec.2 .1 Basic C oncepts and D efinitions 2 1
M achine 1 M achine 2
L ine
G M (a)Single-line diagranA
X G X o X M
f s E I ET1 D EM (b)Idealized m odel
E o
IX o
E v1
s IXL
s E n
Iv
IX u
E u
(c)Phasor diagranl
6 = + 6 + 6G L M
P
(d)Power-angle Curve
Figure 2.1 Pow er transfer characteristicsystem
ofa tw o-m achine
-
2 2 Introduction to the Pow er System Stability Problem C hap . 2
directly proportional to the m achinereactance betw een the voltages,
internal voltages and inversely proportional to thew hich includes reactance of the transm ission line
coM ecting the rnachines and the reactances of the m achines.W hen there are nAore than tsA?tl m achines,
sim ilartheir relative angular displacem ents
affect the interchange of POW ef @111 a m aM er. H ow ever, lilllitirlj values ofpow erdistribution.
transfers and angularM angular
separation are a com plexseparation of 90O betw een
function of generation and load
any two m achines (the nom inallilzxitilljvalue fora two-m achine system ) in itself hasnO particular signiscance.
The stability p henom ena
Stability *IS a condition of equilibrium betw een opposing forces. Them echanism by w hichw ith One another *IS
synchronous m achines m aintain synchronismtk ough restoring forces, w hich act w henever there are forcesor decelerate one or m ore m achines w ith respect to other
interconnected
tending to acceleratem achines. U nder steady-state conditions, there is equilibrium betw een the inputm echanical torque and the output electrical torque of each m achine, and the speedrem ains constant. If the system is pel urbed this equilibrium is upset, resulting inacceleration or deceleration of the rotors of the m achines according to the law s ofm otion of a rotating body. If one generator tem porarily runs faster than another, theangularresulting
position of its rotor relative to that of the slow er m achine Ahrill advance. Theangular@
difference transfers pa= of the load from the slow m achine to thefast m achlne, depending On the pow er-angle relationship. This tends to reduce thespeed difference anddiscussed above, isseparationseparationsystem
result
hence angular separation. The pow er-angle relationship, asnonlinear. B eyond a certain lim it, an increase in angularthe
highly@
IS accom paniedfurther
by-'a decrease in pow er transfer; this increases the angularand leads to instability. For any given situation, the stability of the
depends On w hether Or not the deviations @11l angular positions of the rotors*
111 sufs cient restoring torques.m achinesvhen a synhronous
theloses synchronism falls out of step''or w ith the
rest of system , its rotor runs at a higher Or loqver speed than that requiredstator
to
generate
(correspondingin the m achine
voltages at system frequency. The i i j * 55S IP betw een rotating@
111
f eld
to system frequency) and the rotorfeld results largeprotection
iuctuationsPOW er output,
m achinecurrent, and voltage;this Causes the system
to isolate the unstable from the system .betw eenL oss of synck onism Can OCCUF One m achine and the rest of the
system
m aintainedOr betw een grOuPS of m achines. 111 the latter CaSC synchronism m ay be
Alritlzill each groupoperation
after its separation from the others.The synck onous of interconnected
W aysother
to several Cars speedingbands.
synchronous m achines is in som e
around a circular track while joined to eachanalogousby elastic links Or rubber The
rotors and the rubber bands are analogous@ *
cars representto transm ission lines.
synchronous% en a11 the
the m achineC ars ru n
side by side,the rubber bands rem aln lntact.lf force applied to one of the cars Causesit to speed UP tem porarily, the rubber bands coM ecting it to the other Cars AArill
pedro carvajalResaltado
-
Sec. 2 .1 Basic C oncepts and D ef i n itions 23
tretch;sreactionof the
this tends to slow dow n the faster Car and speed UP the other Cars.A chainresults lzlltil al1 the Cars run at the Sanle speed OnCC @agaln.If the pull On One
rubber bands exceeds its strength, it Alrill break and One Or m OrC Cars sArill pullaW ay from the other Cars.
slJitll electric POW erperturbation
system s,the change in electrical torquecom ponents:
of a synchronous
m achine follow ing Can be resolved illttltAA?tl
16 T L6 +FpAY (2.2)
w here
Tsh &perturbation
*
IS the com ponent of torque changethe
@
111 phase Ahritll the rotor angleA and @IS referred to aS synchronizing torque com ponent; Ts
*
IS the synck onizing torque coeff cient.
FoA @
IS
@
IS the com ponent of torque @111 phasecom ponent;
w ith the speed*
deviation A andreferred to aS the damp ing torque TD IS the dam ping torque
coef cient.
System depnds onthe synchronous m achines.instability throughsuff cient dam ping
stability the existence of bothL ack of suff cient
com ponentssynchronizing
of torque for each oftorque results @111
an aperiodic drift*
111
ill rotor angle.instability.
On the other hand, lack oftorque results oscillatqry
andFor convenience @111 analysis for gaining useful insight illttl the nature ofstability problem s, it is usual to characterize the rotor angle stability phenonaena @111ternls of the follow ing tw o categories:
(a) Small-signal (or small-disturbance) stability is the ability of the power systemto m aintain synchronism under sm all disturbances. Such distgrbances occurcontinually on the system because of sm all variations in loads and generation.The disturbances are considered sufsciently sm all for linearization of systemequationscan be
to be pernlissible forPUCPOSCSincrease
of analysis.in rotor
lnstability that m ay result
of
![Transient Stability Analysis of VSC-HVDC Systems...- Control flexibility can bring better stability in power electronic based power systems Conclusions [1] P. Kundur, Power System](https://static.fdocuments.net/doc/165x107/5e844bdb6c7ae9575773d7e4/transient-stability-analysis-of-vsc-hvdc-systems-control-flexibility-can-bring.jpg)