Pont de (fin), des mesures des jauges dans le pont€¦ · Sujets couverts • Pont de Wheatstone...
59
Chap. 2.6 (fin), 2.7, 2.8, 2.9, 2.5, Chap. 3 Pont de Wheatstone (fin), Dépouillement des mesures (rosettes) Disposition des jauges dans le pont MEC6405‐Analyse Expérimentale des contraintes COURS #3 et #4 (début) Automne 2011 Dép. de Génie Mécanique MEC6405 - Automne 2011
Transcript of Pont de (fin), des mesures des jauges dans le pont€¦ · Sujets couverts • Pont de Wheatstone...
Chap. 2.6 (fin), 2.7, 2.8, 2.9, 2.5, Chap. 3
Pont de Wheatstone (fin),Dépouillement des mesures (rosettes)Disposition des jauges dans le pont
MEC6405‐Analyse Expérimentale des contraintes
COURS #3 et #4 (début)
Automne 2011
Dép. de Génie Mécanique MEC6405 - Automne 2011
Sujets couvertsSujets couverts
• Pont de Wheatstone – Effet des longs fils résistifs (fin)
• Chaîne de mesure, scrutateurs, etc.
• Dépouillement des mesures par jauges (rosettes) avec exemple de calcul
• Choix des jaugesChoix des jauges
• Disposition des jauges dans le pont
• Capteurs à base de jauges (Chap. 3)p j g ( p )
Dép. de Génie Mécanique MEC6405 - Automne 2011
2.6 PROBLÈMES RELIÉS AUX CIRCUITS AVEC PONT DE WHEATSTONEWHEATSTONE
• Non‐linéarité de la réponse du pont
• Effets thermiques
• Effet des longs fils de liaison
Dép. de Génie Mécanique MEC6405 - Automne 2011
2.6.3 EFFETS DES LONGS FILS (RÉSISTIFS)( )
La présence de longs fils résistifs dans le pont deLa présence de longs fils résistifs dans le pont de Wheatstone cause les erreurs suivantes:
1. La résistance des fils varie avec la température. C'est un effet parasite non contrôlé (On peut isoler les filseffet parasite non contrôlé (On peut isoler les fils thermiquement afin de réduire ce problème)
2. Les fils de liaison sont des résistances montées en sérieavec le circuit de la jauge ce qui a pour effet de:
• désensibiliser le pont (output moins grand)
rendre difficile voire impossible l'équilibrage initial du• rendre difficile voire impossible l'équilibrage initial du pont
• générer une erreur dans l'étalonnage électrique
Dép. de Génie Mécanique MEC6405 - Automne 2011
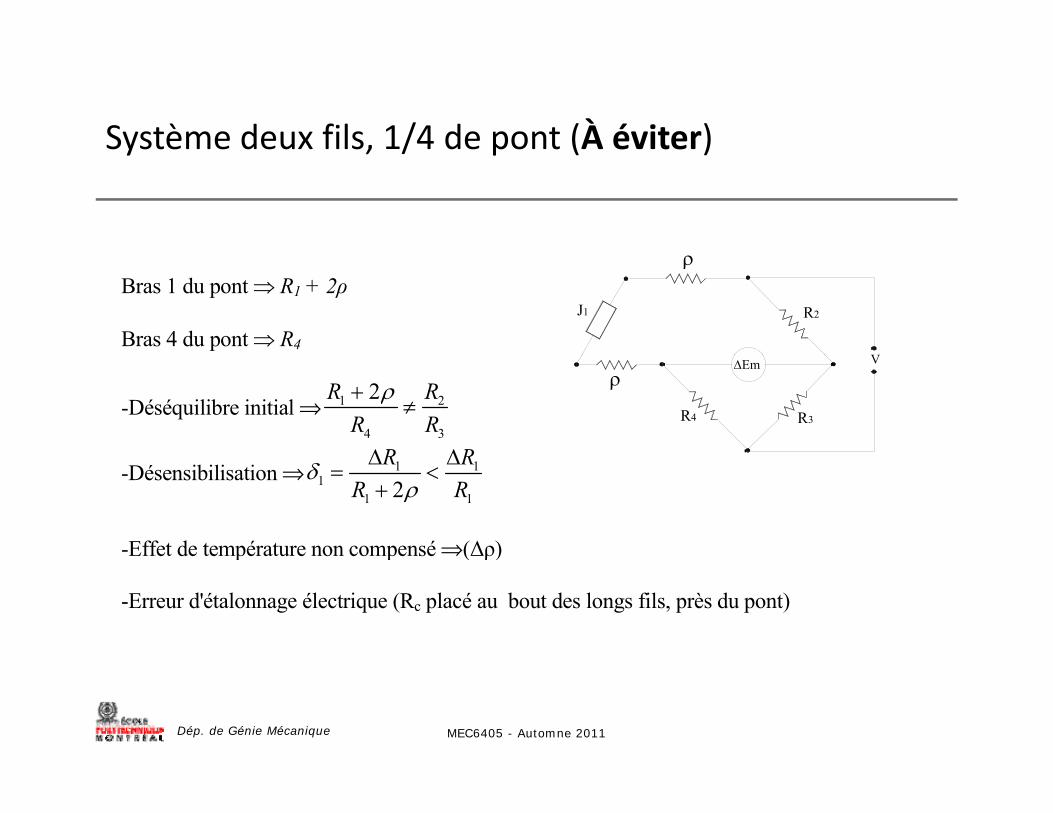
Système deux fils, 1/4 de pont (À éviter)y , / p ( )
J1 R2
V
Bras 1 du pont R1 + 2ρ Bras 4 du pont R4
R4
Em
R3
V
-Déséquilibre initial 1 2
4 3
2R RR R
R R -Désensibilisation 1 1
11 12
R RR R
-Effet de température non compensé (Δρ)p p ( ρ) -Erreur d'étalonnage électrique (Rc placé au bout des longs fils, près du pont)
Dép. de Génie Mécanique MEC6405 - Automne 2011
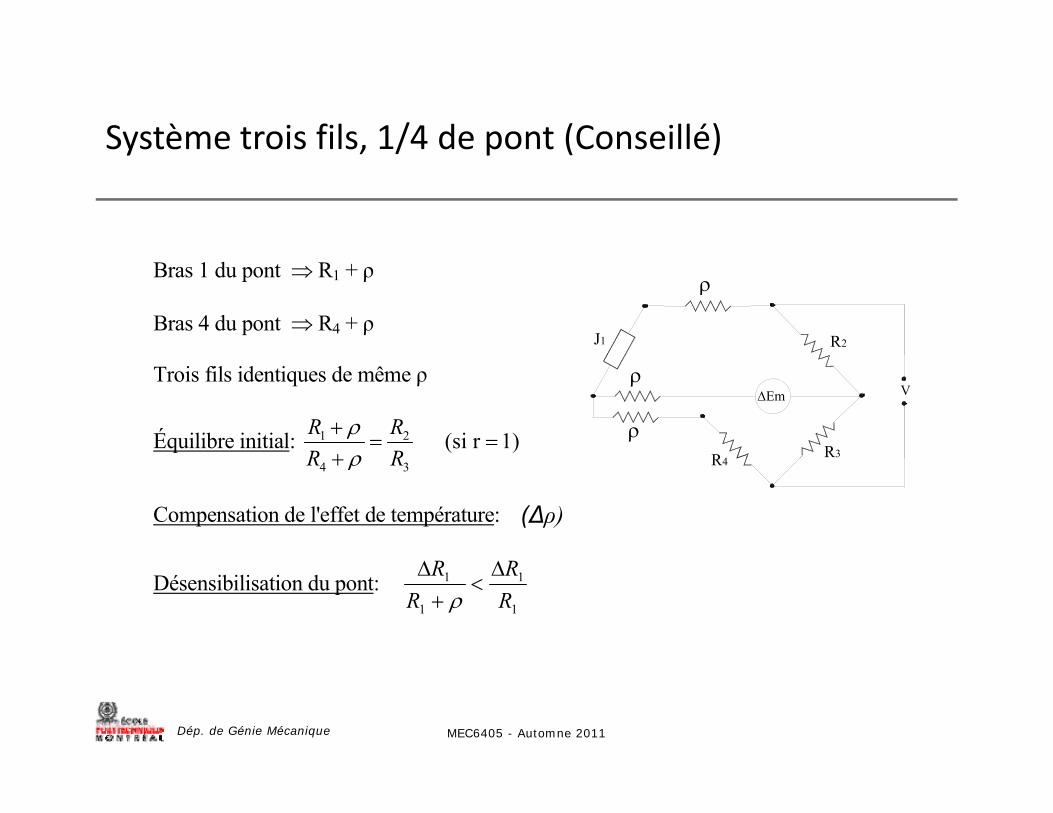
Système trois fils, 1/4 de pont (Conseillé)y , / p ( )
Bras 1 du pont R1 + ρ Bras 4 du pont R4 + ρ
J1 R2
Trois fils identiques de même ρ
Équilibre initial: 1 2 (si r 1)R RR R
R4
Em
R3
V
4 3R R Compensation de l'effet de température:
R4
(Δρ)
Désensibilisation du pont: 1
1
1
1
RR
RR
Dép. de Génie Mécanique MEC6405 - Automne 2011
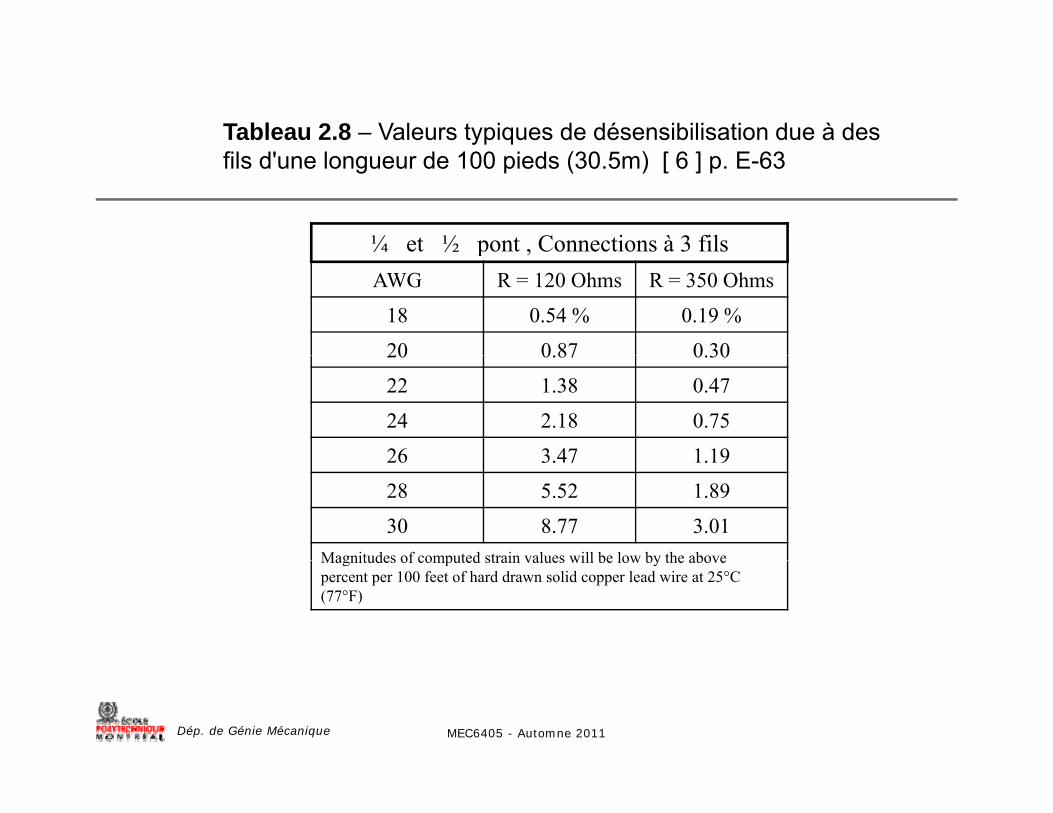
Tableau 2.8 – Valeurs typiques de désensibilisation due à des fils d'une longueur de 100 pieds (30.5m) [ 6 ] p. E-63
¼ et ½ pont , Connections à 3 filsp ,AWG R = 120 Ohms R = 350 Ohms
18 0.54 % 0.19 %
20 0.87 0.3020 0.87 0.30
22 1.38 0.47
24 2.18 0.75
26 3 47 1 1926 3.47 1.19
28 5.52 1.89
30 8.77 3.01Magnitudes of computed strain values will be low by the aboveMagnitudes of computed strain values will be low by the above percent per 100 feet of hard drawn solid copper lead wire at 25°C (77°F)
Dép. de Génie Mécanique MEC6405 - Automne 2011
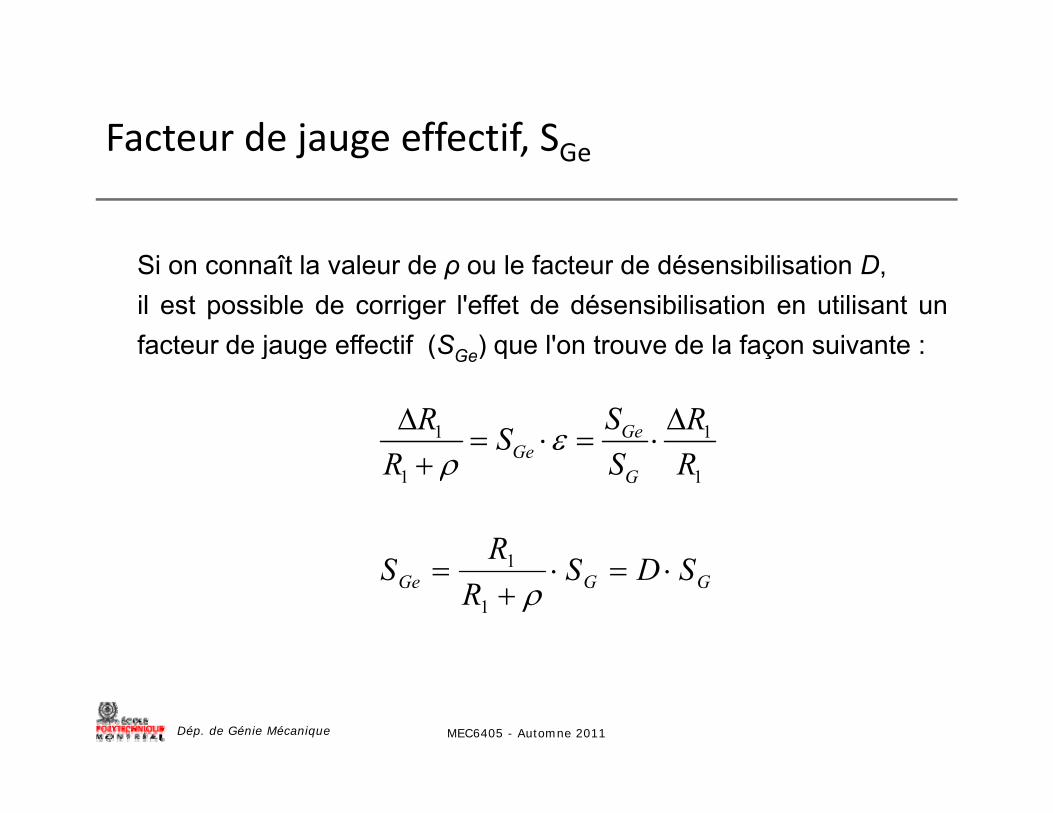
Facteur de jauge effectif, SGeFacteur de jauge effectif, SGe
Si on connaît la valeur de ρ ou le facteur de désensibilisation D,il est possible de corriger l'effet de désensibilisation en utilisant unfacteur de jauge effectif (SGe) que l'on trouve de la façon suivante :
1 1GeGe
SR RSR S R
j g ( Ge) q ç
1 1G
GR S R
SDSR
S 1GGGe SDS
RS
1
1
Dép. de Génie Mécanique MEC6405 - Automne 2011
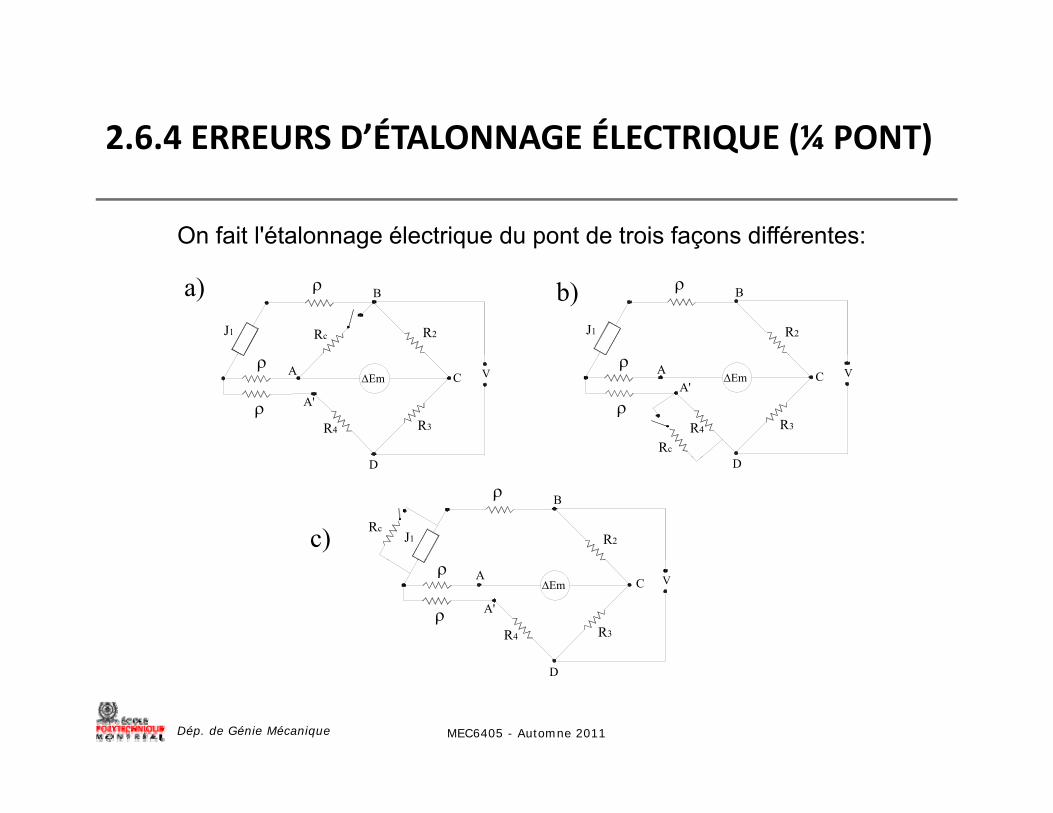
2.6.4 ERREURS D’ÉTALONNAGE ÉLECTRIQUE (¼ PONT)Q ( )
On fait l'étalonnage électrique du pont de trois façons différentes:
J1
R2
a) b)Rc
B
J1
B
R2
Em
R4 R3
V
A
A'
A
R4
A'
Rc
VEm
R3
C C
c) J1
Rc
B
R2
D D
A
R4
A'
VEm
R3
C
Dép. de Génie Mécanique MEC6405 - Automne 2011
D
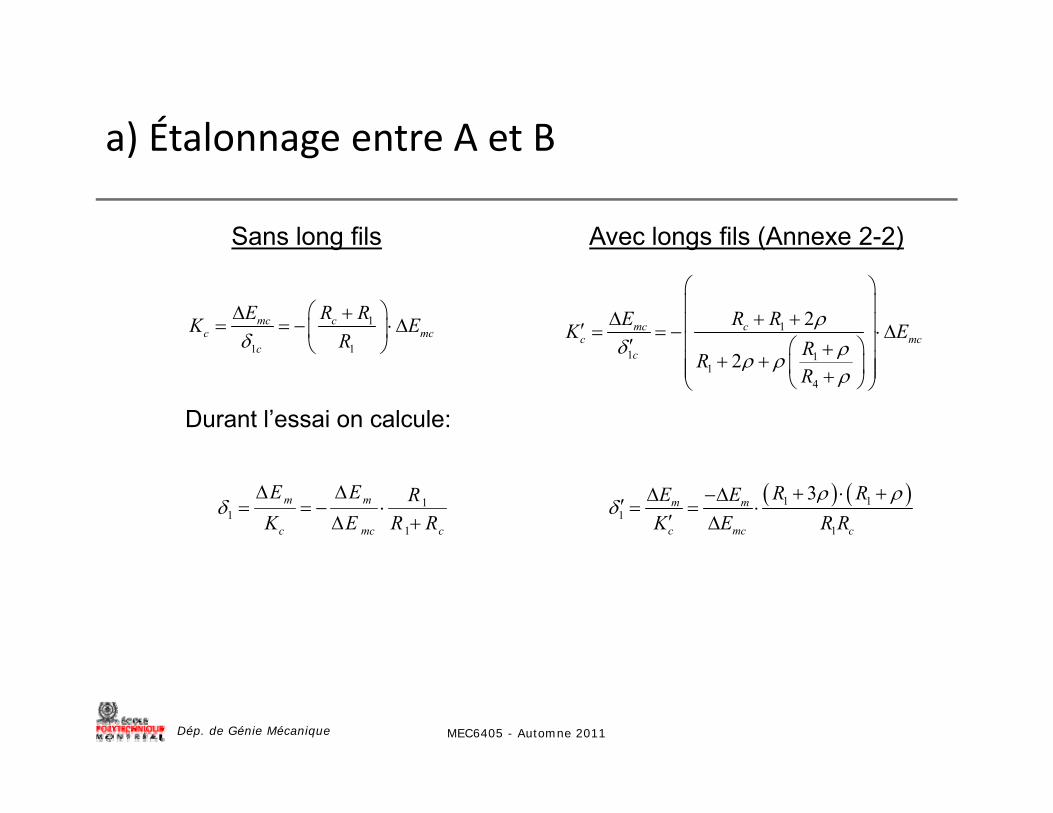
a) Étalonnage entre A et Ba) Étalonnage entre A et B
Sans long fils Avec longs fils (Annexe 2-2)
1
1 1
mc cc mc
c
E R RK ER
1
1 1
2
2
mc cc mc
c
E R RK ERR
1 11
4
2c RR
Durant l’essai on calcule:
11
1
m m
c mc c
E E RK E R R
1 11
1
3m m
c mc c
R RE EK E R R
Dép. de Génie Mécanique MEC6405 - Automne 2011
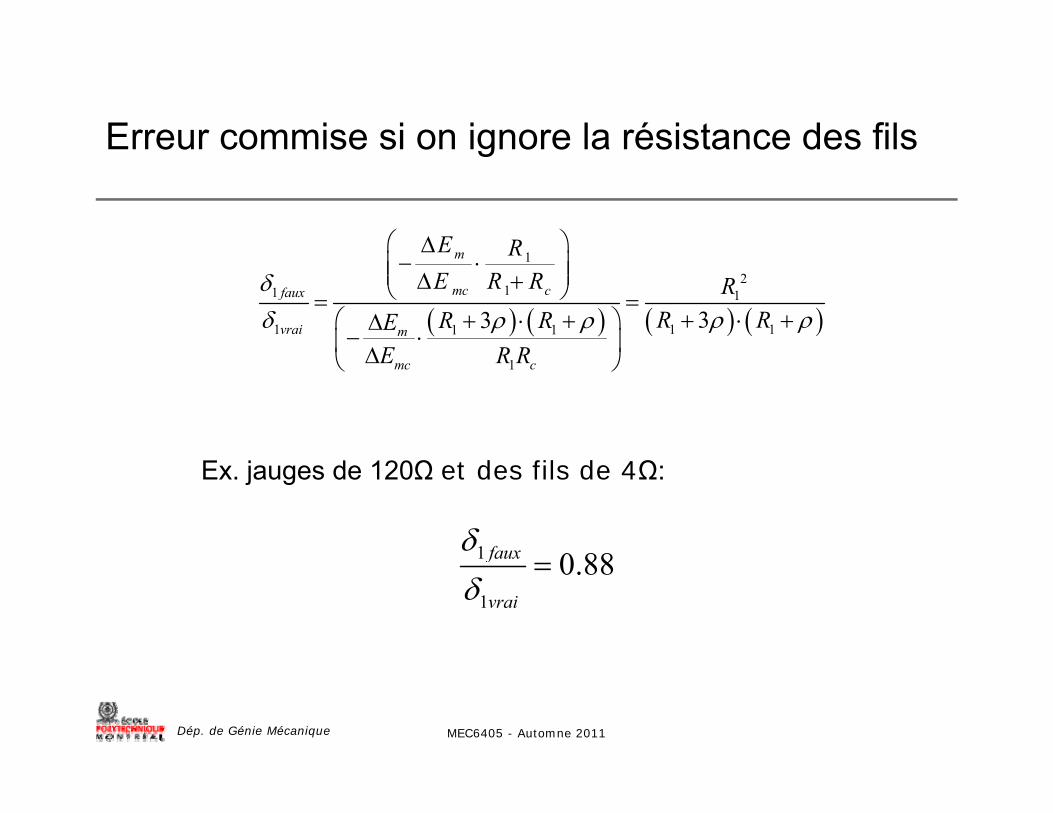
Erreur commise si on ignore la résistance des filsg
1mE R
12
11 1
1 1 11 1 33
m
mc cfaux
vrai m
RE R R R
R RR REE R R
1mc cE R R
Ex. jauges de 120Ω et des fils de 4Ω:
1 0 88faux
1
0.88f
vrai
Dép. de Génie Mécanique MEC6405 - Automne 2011
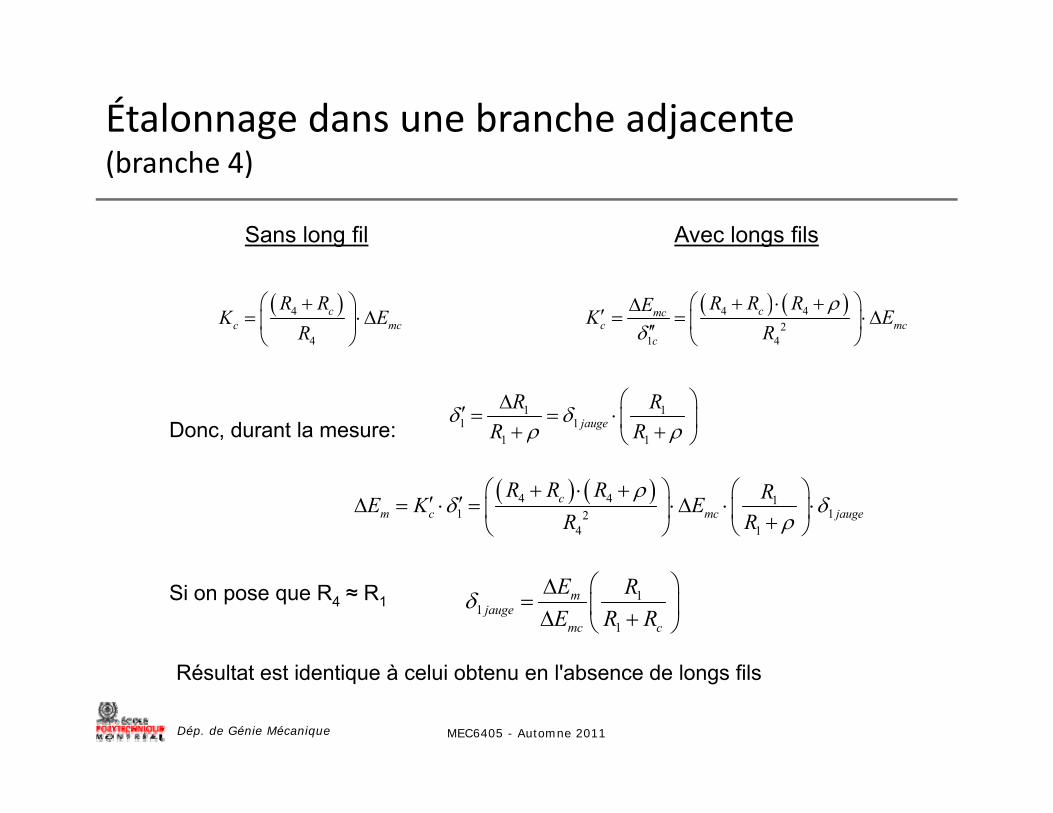
Étalonnage dans une branche adjacente (branche 4)
Sans long fil Avec longs fils
4
4
cc mc
R RK E
R
4 42
1 4
cmcc mc
c
R R REK ER
1 11 1
1 1jauge
R RR R
Donc, durant la mesure:
4 4 11 12
4 1
cm c mc jauge
R R R RE K ER R
11
1
mjauge
mc c
E RE R R
Si on pose que R4 ≈ R1
Dép. de Génie Mécanique MEC6405 - Automne 2011
Résultat est identique à celui obtenu en l'absence de longs fils
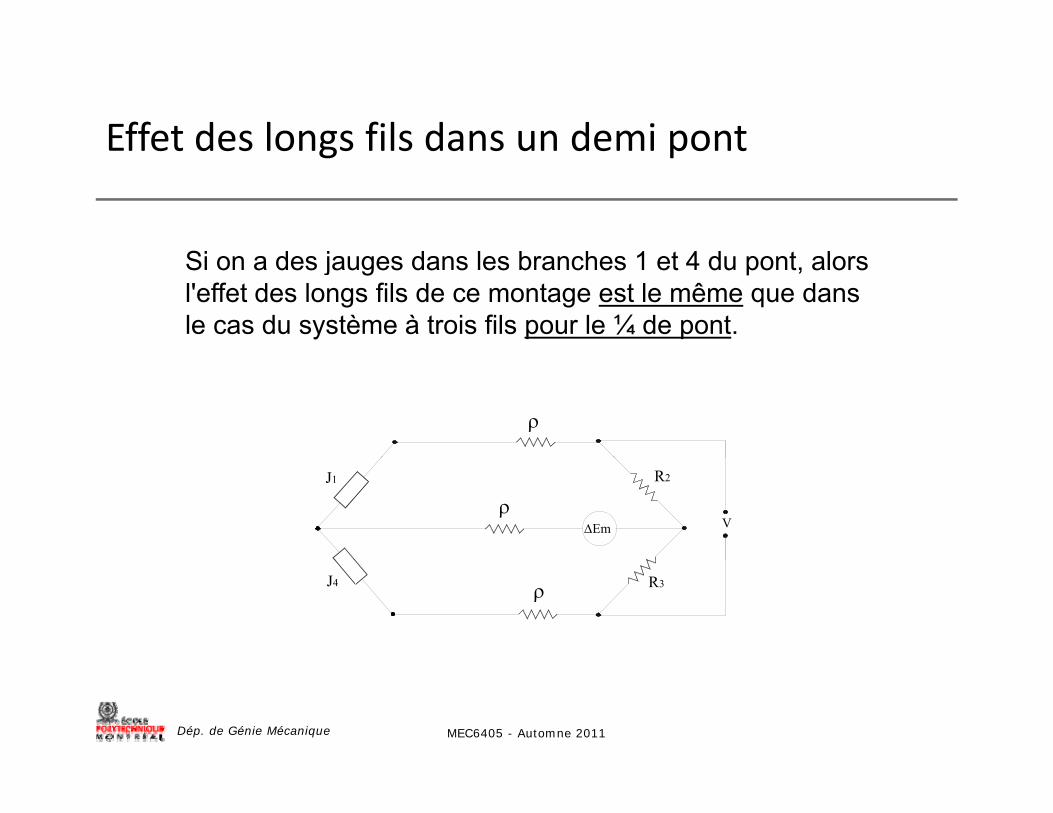
Effet des longs fils dans un demi pontEffet des longs fils dans un demi pont
Si d j d l b h 1 t 4 d t lSi on a des jauges dans les branches 1 et 4 du pont, alors l'effet des longs fils de ce montage est le même que dans le cas du système à trois fils pour le ¼ de pont.
Em
J1 R2
V
R3J4
Dép. de Génie Mécanique MEC6405 - Automne 2011
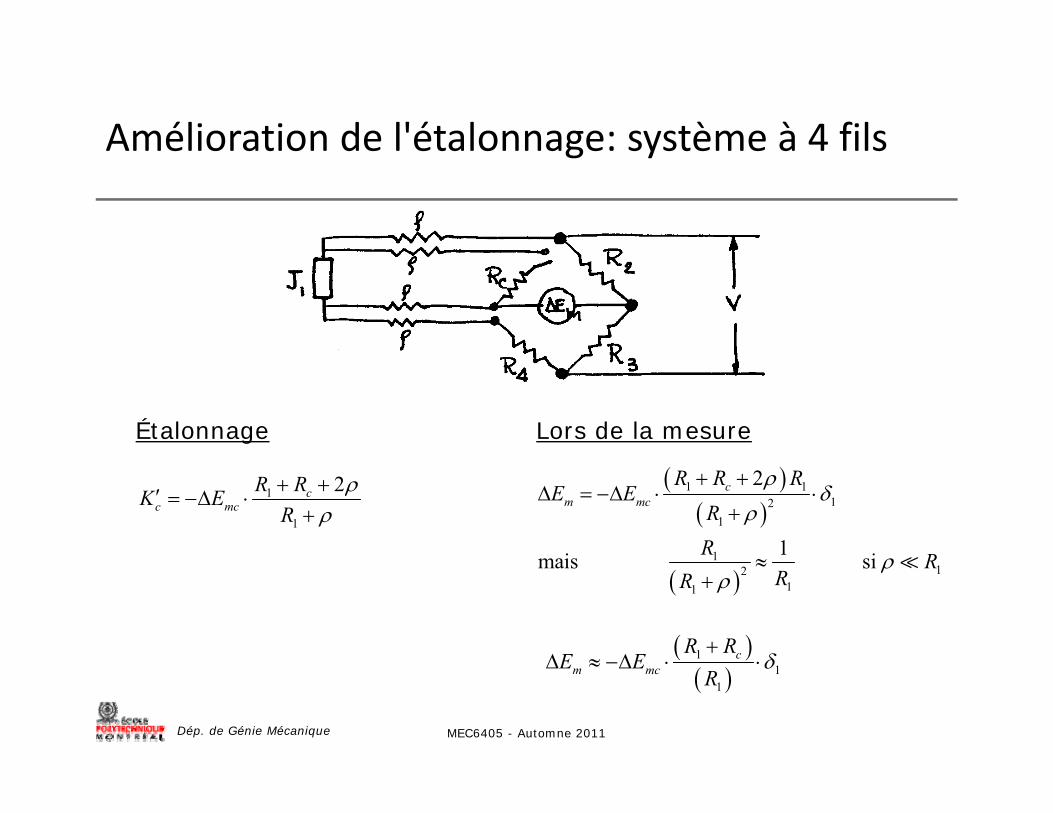
Amélioration de l'étalonnage: système à 4 filsAmélioration de l étalonnage: système à 4 fils
Étalonnage Lors de la mesure
1
1
2cc mc
R RK ER
1 112
1
1
2
1mais si
cm mc
R R RE E
RR R
12
11
mais si RRR
1 cR RE E
Dép. de Génie Mécanique MEC6405 - Automne 2011
11
m mcE ER
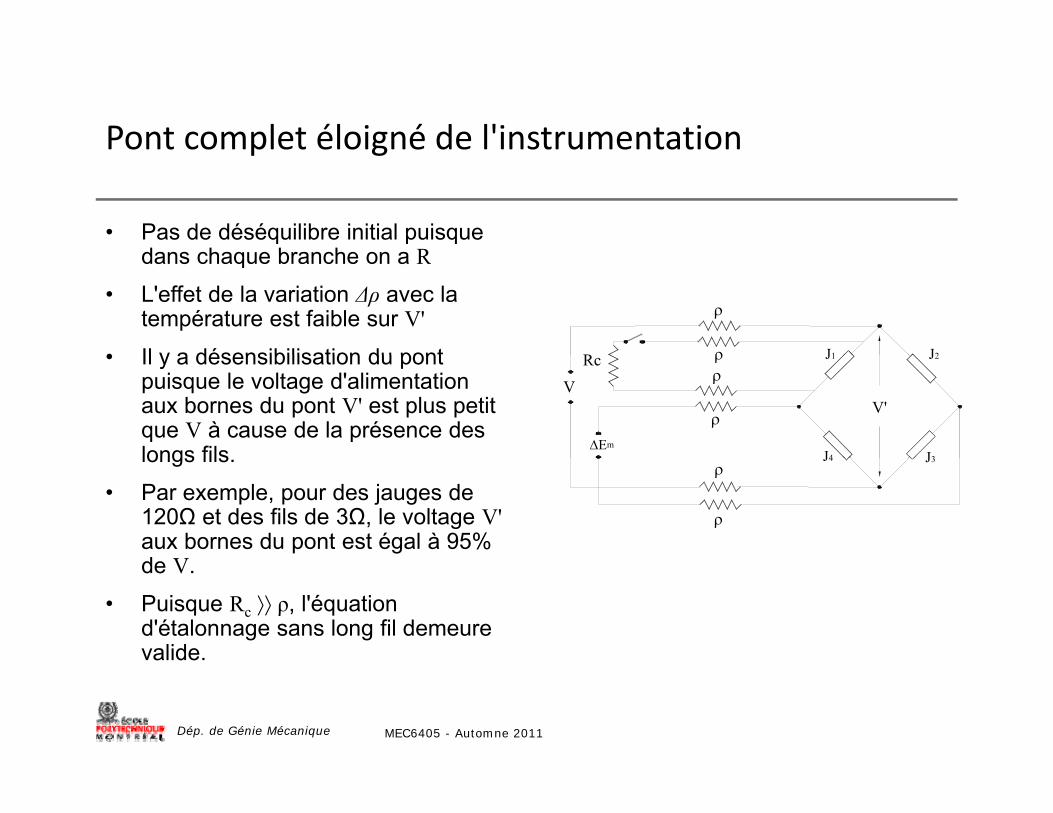
Pont complet éloigné de l'instrumentationp g
• Pas de déséquilibre initial puisque dans chaque branche on a Rdans chaque branche on a R
• L'effet de la variation Δρ avec la température est faible sur V'
• Il y a désensibilisation du pont J1 J2R
• Il y a désensibilisation du pont puisque le voltage d'alimentation aux bornes du pont V' est plus petit que V à cause de la présence des longs fils
V'
J1 J2
J3J4
Rc
Em
V
longs fils.
• Par exemple, pour des jauges de 120Ω et des fils de 3Ω, le voltage V'aux bornes du pont est égal à 95% d V
J3J4
de V.
• Puisque Rc ρ, l'équation d'étalonnage sans long fil demeure valide.
Dép. de Génie Mécanique MEC6405 - Automne 2011
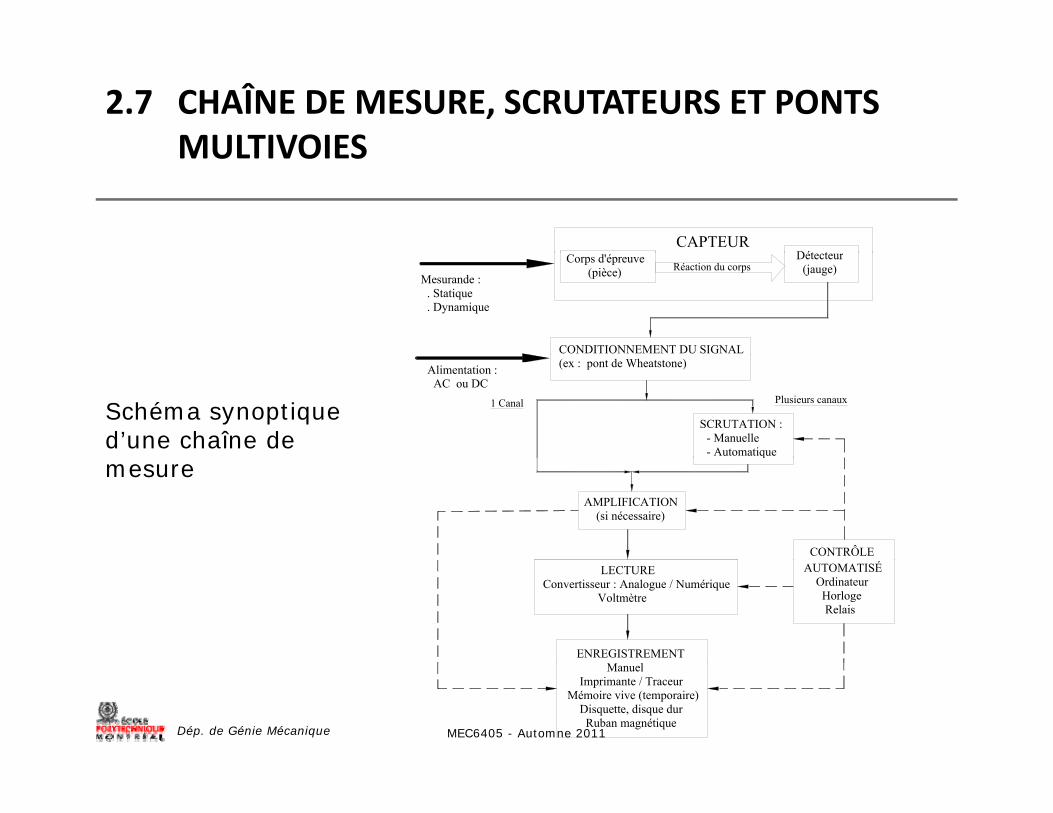
2.7 CHAÎNE DE MESURE, SCRUTATEURS ET PONTS MULTIVOIESMULTIVOIES
Dét tCAPTEUR
Corps d'épreuve (pièce)
Détecteur (jauge)Réaction du corps
Mesurande : . Statique . Dynamique
CONDITIONNEMENT DU SIGNAL(ex : pont de Wheatstone)Alimentation :
AC ou DC
SCRUTATION : - Manuelle - Automatique
1 Canal Plusieurs canauxSchéma synoptique d’une chaîne de q
AMPLIFICATION (si nécessaire)
CONTRÔLE
mesure
LECTUREConvertisseur : Analogue / Numérique Voltmètre
AUTOMATISÉ Ordinateur Horloge Relais
ENREGISTREMENTl
Dép. de Génie Mécanique
Manuel Imprimante / TraceurMémoire vive (temporaire) Disquette, disque dur Ruban magnétique
MEC6405 - Automne 2011
2.7.2 Scrutateurs et ponts multivoies2.7.2 Scrutateurs et ponts multivoies
• Si on a plusieurs voies (ponts) et que les phénomènes ne varient pas trop rapidement par économie on n'utilise qu'un seul instrument de mesurerapidement, par économie, on n'utilise qu'un seul instrument de mesure qui est commuté successivement à chacune des voies.
• La commutation est assurée par un scrutateur ou multiplexeur dont les qualités essentielles sont:q
– faibles valeurs des résistances de contact
– fiabilité supérieure
• Question fondamentale de la commutation
Doit‐on alimenter les jauges en permanence, ou bien seulement lorsqu'on effectue la mesure?lorsqu on effectue la mesure?
Dép. de Génie Mécanique MEC6405 - Automne 2011
Avantages et inconvénients des deux modes d' li t ti d td'alimentation des ponts
Alimentation Alimentation à la permanente
• stabilisation des jauges en
commutation
• stabilisation des jauges en température
• peut demander une source de grand ampérage
• problème de régime transitoire en température
• plus simple et moins coûteuxgrand ampérage
• solution potentiellement coûteuse
Le choix dépend de la précision requise !
Dép. de Génie Mécanique MEC6405 - Automne 2011
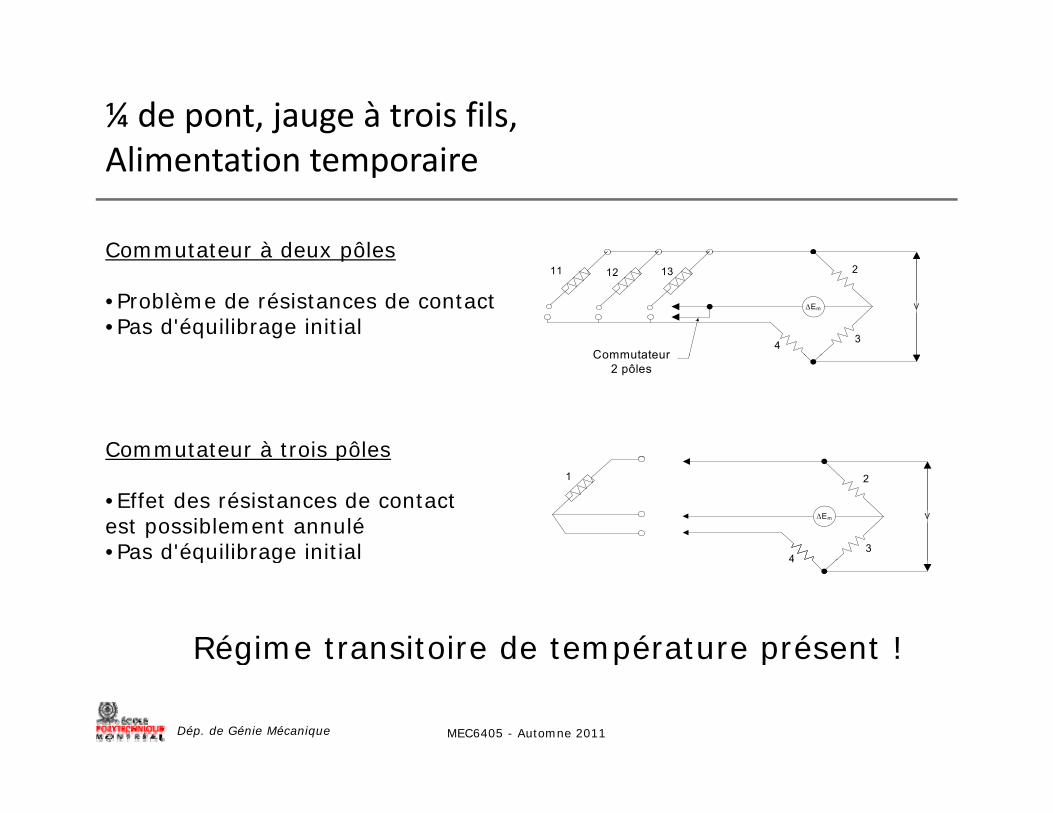
¼ de pont, jauge à trois fils, Ali t ti t iAlimentation temporaire
Commutateur à deux pôles
4
V
2
3
11 12 13
Commutateur
Em
Commutateur à deux pôles
•Problème de résistances de contact•Pas d'équilibrage initial
Commutateur2 pôles
Commutateur à trois pôles
V
2
3
Em
4
1
p
•Effet des résistances de contact est possiblement annulé •Pas d'équilibrage initial 4q g
Régime transitoire de température présent !
Dép. de Génie Mécanique
g p p
MEC6405 - Automne 2011
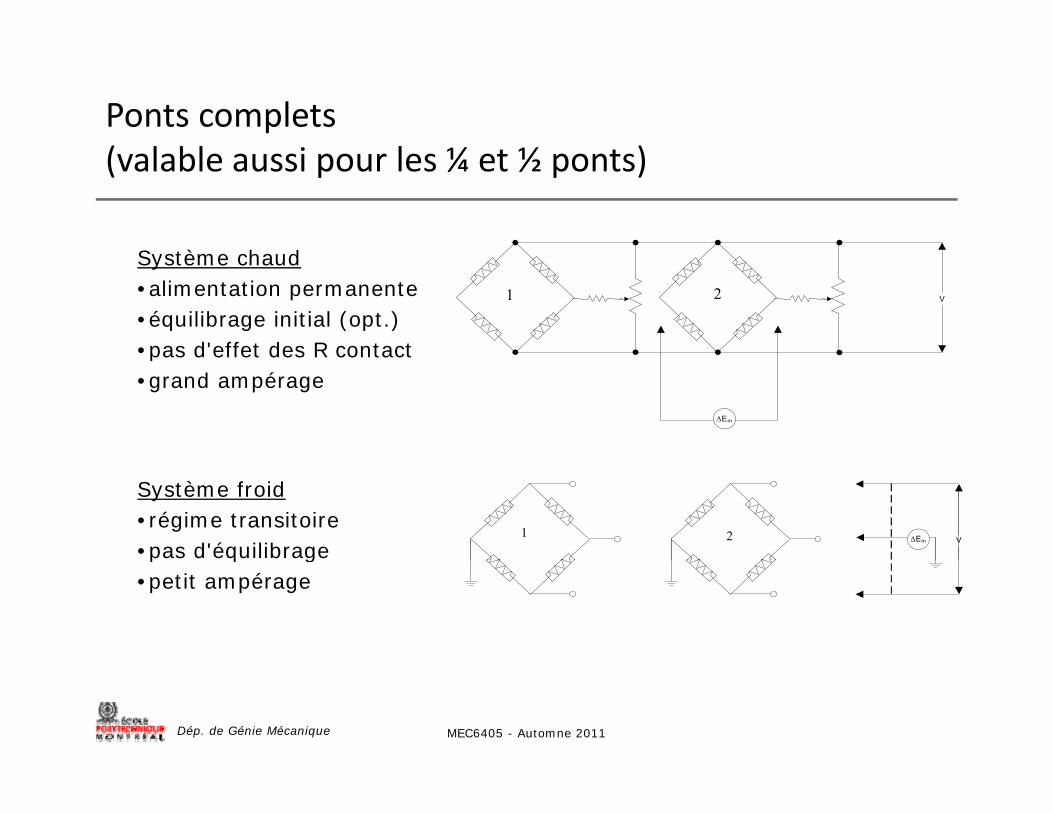
Ponts complets ( l bl i l ¼ t ½ t )(valable aussi pour les ¼ et ½ ponts)
S tè h d
V
Système chaud•alimentation permanente•équilibrage initial (opt.)•pas d'effet des R contact
Em
pas d effet des R contact•grand ampérage
VEm
Système froid•régime transitoire •pas d'équilibrage p q g•petit ampérage
Dép. de Génie Mécanique MEC6405 - Automne 2011
2.8 DÉPOUILLEMENT DES MESURES PAR JAUGES ( 2 61 à 2 70)(p. 2‐61 à 2‐70)
• Correction pour l'effet transversal (K)Correction pour l effet transversal (K)• Les déformations dans un plan
– Déformations principalesDéformations principales
– Cercle de Mohr
• Concept de l’état apparent de déformationp pp
• Notions de rosette
• Exemple de calculExemple de calcul
Dép. de Génie Mécanique MEC6405 - Automne 2011
2.9 CHOIX DES JAUGES2.9 CHOIX DES JAUGES
Les domaines d’application sont vastes mais on rencontre pp
principalement:
– mesure des déformations en chantier ou en laboratoire
– conditions statiques ou bien dynamiques (fatigue, vibrations)
– mesure des concentrations de contraintes
– mesure des contraintes résiduelles
– mesure des contraintes thermiques
capteurs– capteurs
Dép. de Génie Mécanique MEC6405 - Automne 2011
Points à considérer pour le choix des jaugesp j g
L’environnement• température
La géométrie de la structure• détails à étudier (congés arrondis bords• température
• la déformation maximale• la fatigue provenant des cycles de
déformations choix d’une série
• détails à étudier (congés, arrondis, bords, recoins)
• la cause des déformations (traction, torsion, flexion, cisaillement, contraintes résiduelles)choix d une série
Les conditions de mise en oeuvre• facilité de collage et de câblage
(laboratoire vs chantier)
• la puissance de dissipation acceptablechoix d’une géométrie
L’instrumentation utilisée( )choix d’une option
La nature physique de la structure• coefficient de dilatation du matériau
• conditionnement du signal, alimentation, amplification,
choix d’une résistance nominale
choix d’une compensation
Méthode détaillée pour le choix dans l'Annexe 2-3
Dép. de Génie Mécanique
Méthode détaillée pour le choix dans l Annexe 2 3
MEC6405 - Automne 2011
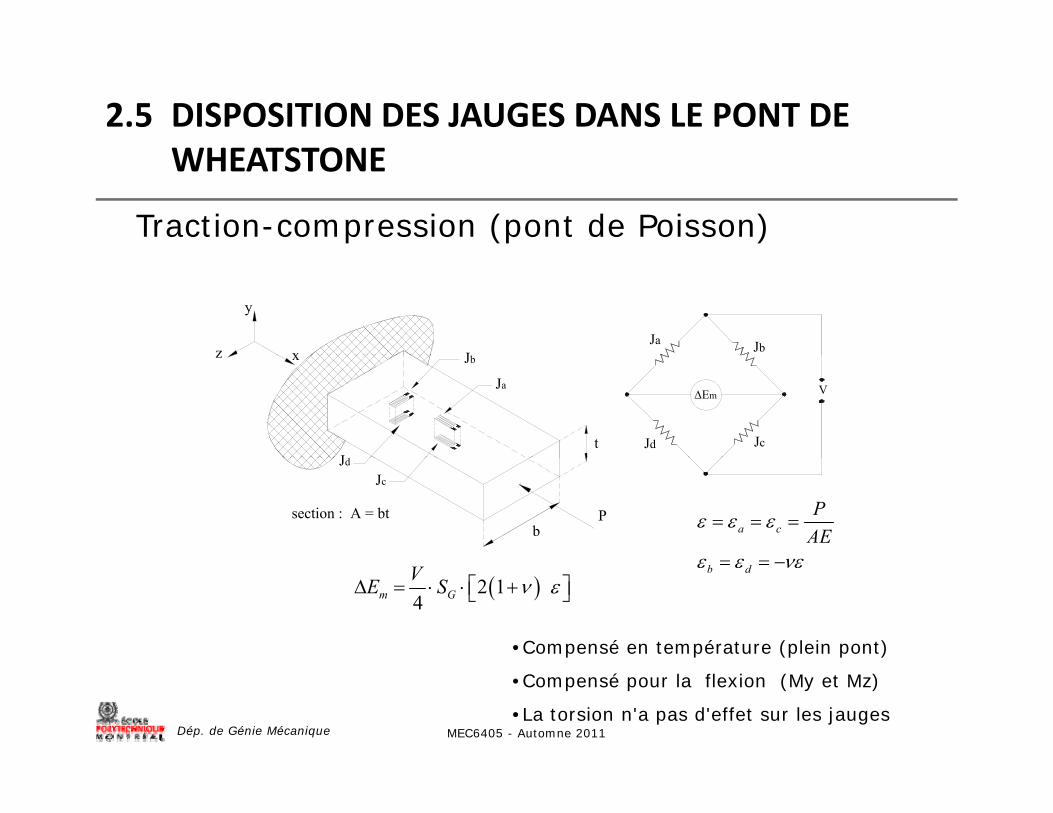
2.5 DISPOSITION DES JAUGES DANS LE PONT DE WHEATSTONEWHEATSTONE
Traction-compression (pont de Poisson)
x
y
z Jb
Ja Jbxz
t
Ja
Jb
Jd
VEm
JcJd
Pb
section : A = bt
Jc
Jd
a cP
AE
•Compensé en température (plein pont)
b d 2 1
4m GVE S
Dép. de Génie Mécanique MEC6405 - Automne 2011
•Compensé pour la flexion (My et Mz)
•La torsion n'a pas d'effet sur les jauges
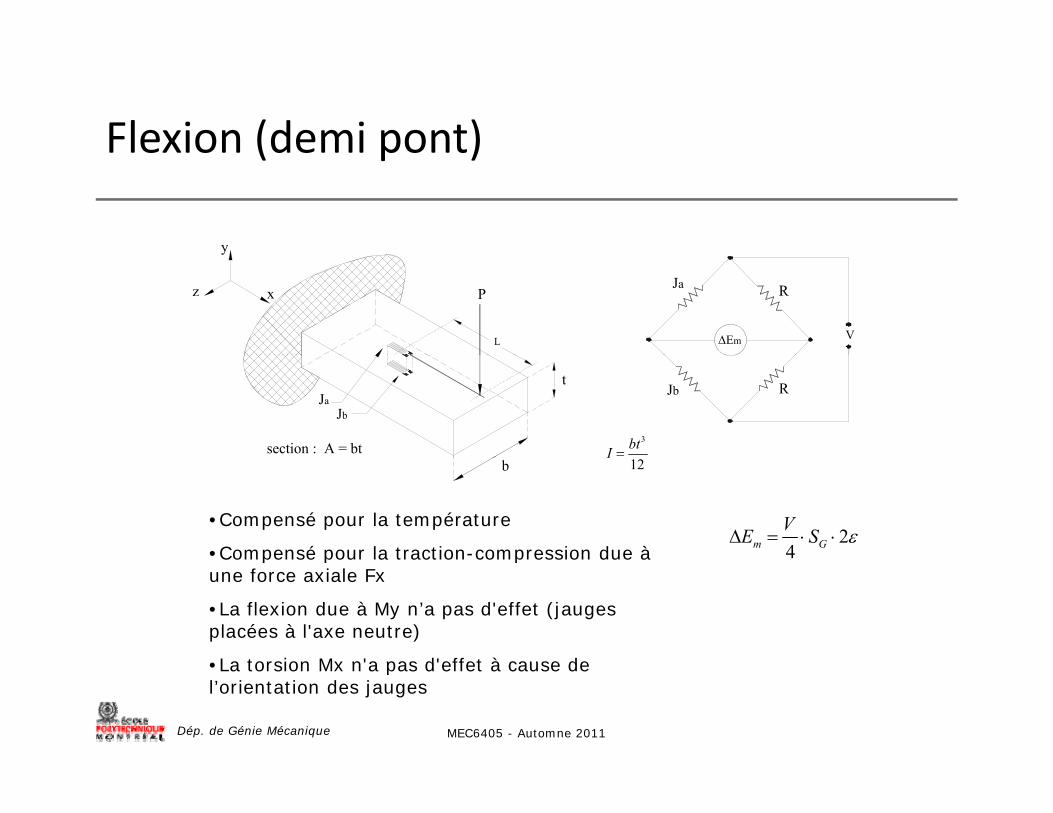
Flexion (demi pont)Flexion (demi pont)
y
x
y
z P
L VEm
Ja R
3
;a bPL btI
t
section : A = bt
JaJb
Jb R
;2 12a b IEb
24m GVE S
•Compensé pour la température
•Compensé pour la traction-compression due à p p pune force axiale Fx
•La flexion due à My n’a pas d'effet (jauges placées à l'axe neutre)
•La torsion Mx n'a pas d'effet à cause de
Dép. de Génie Mécanique MEC6405 - Automne 2011
•La torsion Mx n a pas d effet à cause de l’orientation des jauges
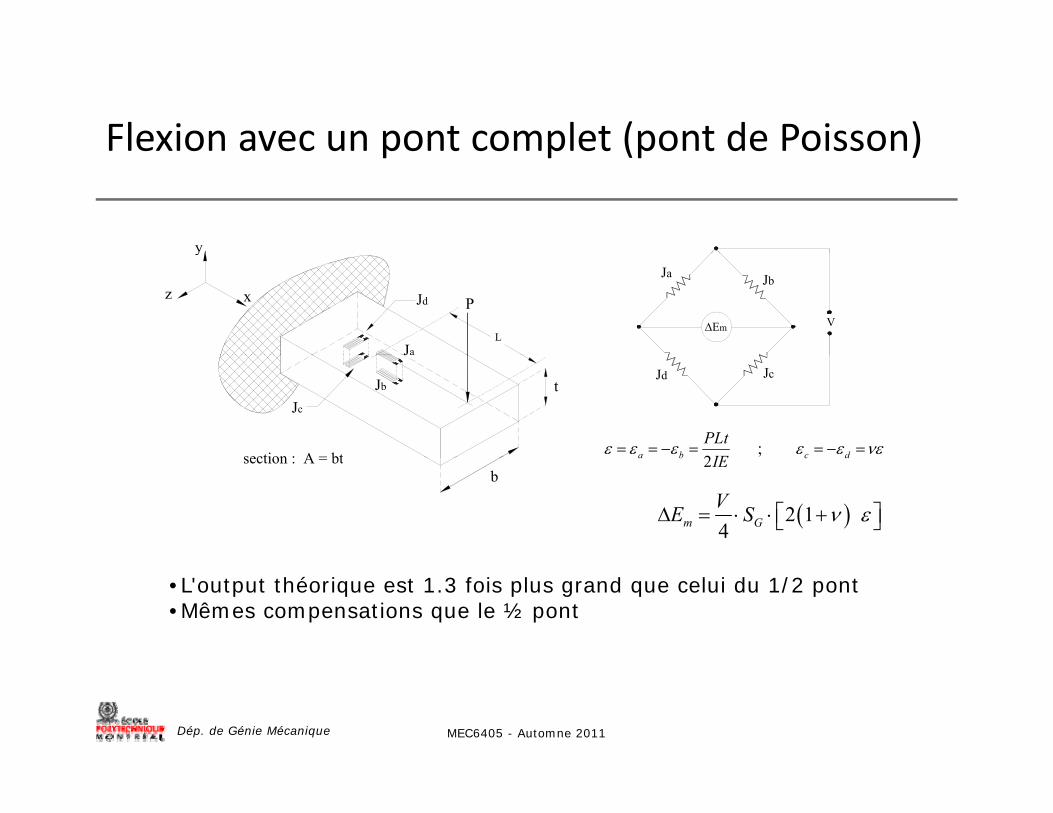
Flexion avec un pont complet (pont de Poisson)Flexion avec un pont complet (pont de Poisson)
y
x
y
z P
Ja
Jd
LVEm
Ja Jb
; 2a b c dPLt
IE
t
section : A = bt
Jb
Jc
JcJd
2a b c dIEb
section : A = bt
2 14m GVE S
•L'output théorique est 1.3 fois plus grand que celui du 1/2 pont•Mêmes compensations que le ½ pont
Dép. de Génie Mécanique MEC6405 - Automne 2011
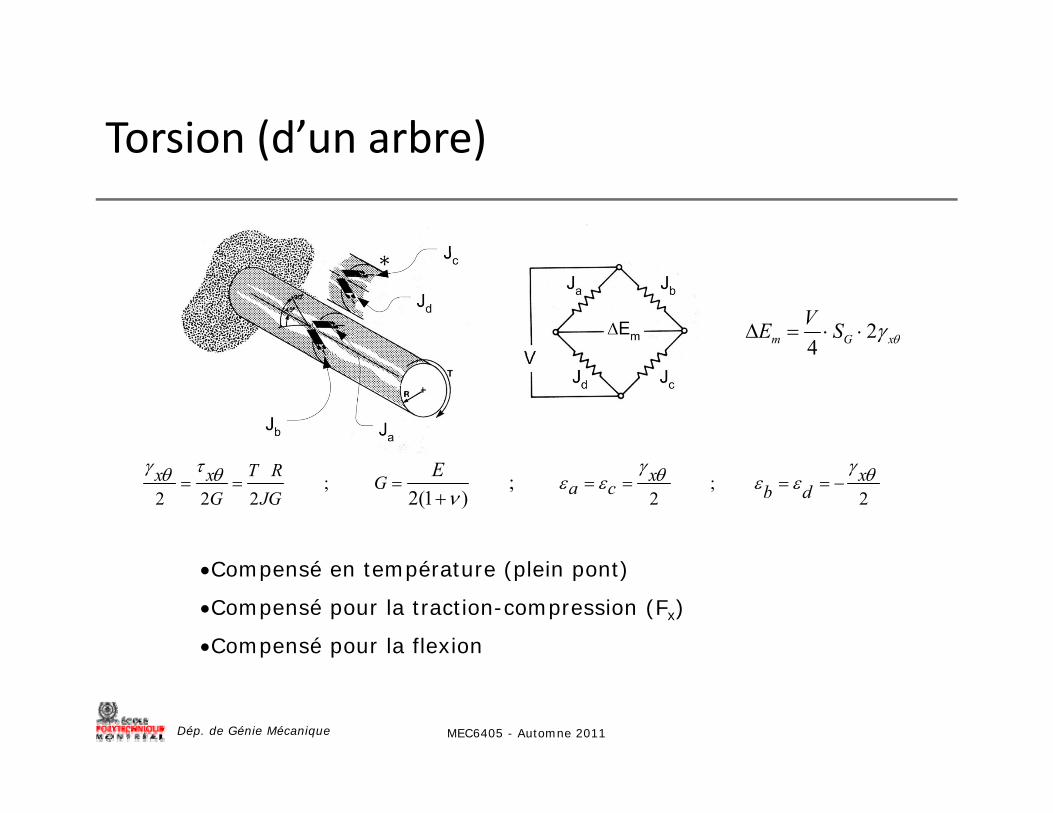
Torsion (d’un arbre)Torsion (d un arbre)
24m G xVE S
; ;2 2 2 2 2
;2(1 )
T Rx x x xG a c b dG JGE
é é ( l )Compensé en température (plein pont)
Compensé pour la traction-compression (Fx)
Compensé pour la flexion
Dép. de Génie Mécanique MEC6405 - Automne 2011
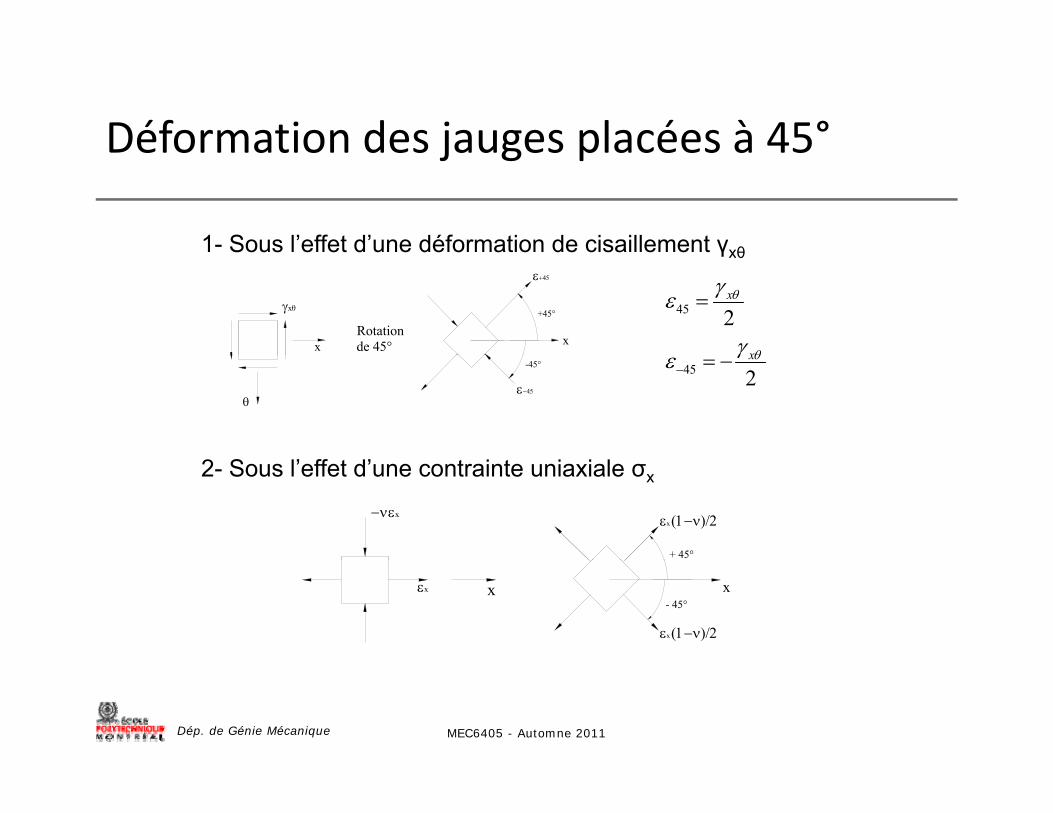
Déformation des jauges placées à 45°Déformation des jauges placées à 45
1- Sous l’effet d’une déformation de cisaillement γxθ
x
x
x
Rotation de 45°
+45° 45 2x
x
γxθ
-45° 45 2x
2- Sous l’effet d’une contrainte uniaxiale σx
x x
+ 45°
x x
x
x- 45°
Dép. de Génie Mécanique MEC6405 - Automne 2011
ConclusionsConclusions
- Lorsque les jauges sont collées sur le corps d'épreuve deLorsque les jauges sont collées sur le corps d épreuve de façon à réaliser un demi pont ou préférablement un pont complet, on obtient:
une compensation thermique une compensation thermique
une isolation de l'effet mécanique désiré
un output électrique maximum un output électrique maximum
- Lorsqu'il s'agit de disposer les jauges dans le pont de Wheatstone, il faut se rappeler que :
les branches 1 et 3 sont positives
les branches 2 et 4 sont négatives
Dép. de Génie Mécanique MEC6405 - Automne 2011
Chapitre 3CAPTEURS À BASE DE JAUGES DE CAPTEURS À BASE DE JAUGES DE DÉFORMATION
• Parmi tous les capteurs qui servent à mesurer des phénomènes mécaniques usuels comme les forces, les moments, les poids, les pressions, etc., ceux qui utilisent des jauges de déformations sont les plus nombreux.
VEm
1 2
34
Dép. de Génie Mécanique MEC6405 - Automne 2011
La popularité des capteurs à base de jauges s’explique d i i i lpar deux raisons principales
• À égalité de performance avec d'autres capteurs, ils ont l'avantage d'utiliser des instruments universels, sont d'emplois variés et bénéficient d'une technique bien définie. G â à t il t t è l t é dGrâce à ces avantages, ils sont très largement répandus.
• On peut fabriquer des capteurs soi‐même pour répondre à des besoins spécifiques. On peut aussi transformer une structure existante en capteur, par exemple: un boulon, une presse, un treuil, une aile d'avion.
Dép. de Génie Mécanique MEC6405 - Automne 2011
Qu'est ce qu'un capteur à jauges ?Qu est ce qu un capteur à jauges ?
• Capteur passif qui comprend trois éléments:p p q p
– Un corps d'épreuve : Dispositif mécanique transformant la grandeur à mesurer en déformation d'une pièce de nature généralement métalliquemétallique
– Un détecteur : Élément sensible constitué d'une ou de plusieurs jauges qui, convenablement placées sur le corps d'épreuve, transforment les déf ti i ti d é i t él t i (ΔR/R)déformations en variation de résistance électrique (ΔR/R).
– Un circuit de conditionnement et des circuits connexes de compensation (si requis)
Dép. de Génie Mécanique MEC6405 - Automne 2011
Quelles sont les applications principales des capteurs à j ?à jauges ?
• Mesure des :
– pressions
– forces
– couples (moments)couples (moments)
– puissances
– déplacements
i li i– inclinaisons
• Balances industrielles
Dép. de Génie Mécanique MEC6405 - Automne 2011
Principes de base pour la conceptionPrincipes de base pour la conception
• Les jauges collées sur le corps d'épreuve (capteur) et convenablement groupées transforment les déformations du corps en variations de résistance qui sont proportionnelles à la grandeur physique
• Un capteur est plus ou moins sensible à tous les phénomènes ambiants: forces, moments, pressions, températures, accélérations, etc.. Pour mesurer avec précision une seule de ces grandeurs physiques, il faut que celle‐ci soit la cause majeure des déformations
• La réponse du capteur doit être indépendante des autres grandeurs p p p gphysiques (parasites)
Dép. de Génie Mécanique MEC6405 - Automne 2011
Performance des capteursPerformance des capteurs
• L’indépendance par rapport aux parasites est obtenue par:– la conception mécanique,– la disposition des jauges,– les circuits de conditionnement et de compensation
• Pour les capteurs, les précisions obtenues peuvent être considérablement supérieures à celles que donnent les jauges pour les mesures de déf i (f d j 'à 0 % è )déformations (facteur de jauge connu qu'à 0.5% près)
• Un capteur peut être étalonné directement en appliquant une grandeur L f d t à b d j t i dconnue. Les performances des capteurs à base de jauges sont moins dues
aux jauges qu'à la qualité de leur conception.
Dép. de Génie Mécanique MEC6405 - Automne 2011
Caractéristiques mécaniques du capteurCaractéristiques mécaniques du capteur
• La flèche: faible pour un capteur de force
• La force de réaction: minimum pour un capteur de déplacement
• La déformation: pour une plus grande linéarité dans la réponse et une longue durée de vie, limiter les déformations aux jauges à ± 1000 μm/m.g , j g μ /
• La contrainte: la contrainte ne doit pas dépasser nulle part la contrainte d'écoulement du matériau (Sy du corps d'épreuve). Pour un comportement linéaire et une bonne tenue en fatigue, limiter la p g ,contrainte à ± 0.25 Sy.
Dép. de Génie Mécanique MEC6405 - Automne 2011
Caractéristiques mécaniques du capteur (suite)q q p ( )
• La variation de température:
– Compensée par un demi pont ou un pont complet
– Choisir un matériau à faible coefficient de dilatation et des jauges autocompensées pour le matériau
– Isoler des courants d'air et sources de chaleur ponctuelles
• Effets mécaniques parasites:
– choisir une géométrie qui donnera εmax pour l'effet mécanique mesurég q max p q
• Effets vibratoires:
– fréquence naturelle > 1.5 x la fréquence maximale du mesurande
amortissement interne adéquat– amortissement interne adéquat
Dép. de Génie Mécanique MEC6405 - Automne 2011
Caractéristiques mécaniques du capteur (suite)q q p ( )
• Effets d'hystérésis: – supprimer ou minimiser toutes les sources de frottement (pièces
mobiles)• Protection:
– munir le capteur de limitations et de butées pour éviter les dommages irréparables en cas de surcharges accidentelles ou encore les dangers résultant d'une rupture du capteurrésultant d une rupture du capteur
Dép. de Génie Mécanique MEC6405 - Automne 2011
Métaux pour corps d'épreuvep p p
• Les aciers mangano‐silicieux (aciers à ressort à haute limite élastique)
• Les bronzes au béryllium
• Les alliages d'aluminium (avec traitements thermiques appropriés)appropriés)
Dép. de Génie Mécanique MEC6405 - Automne 2011
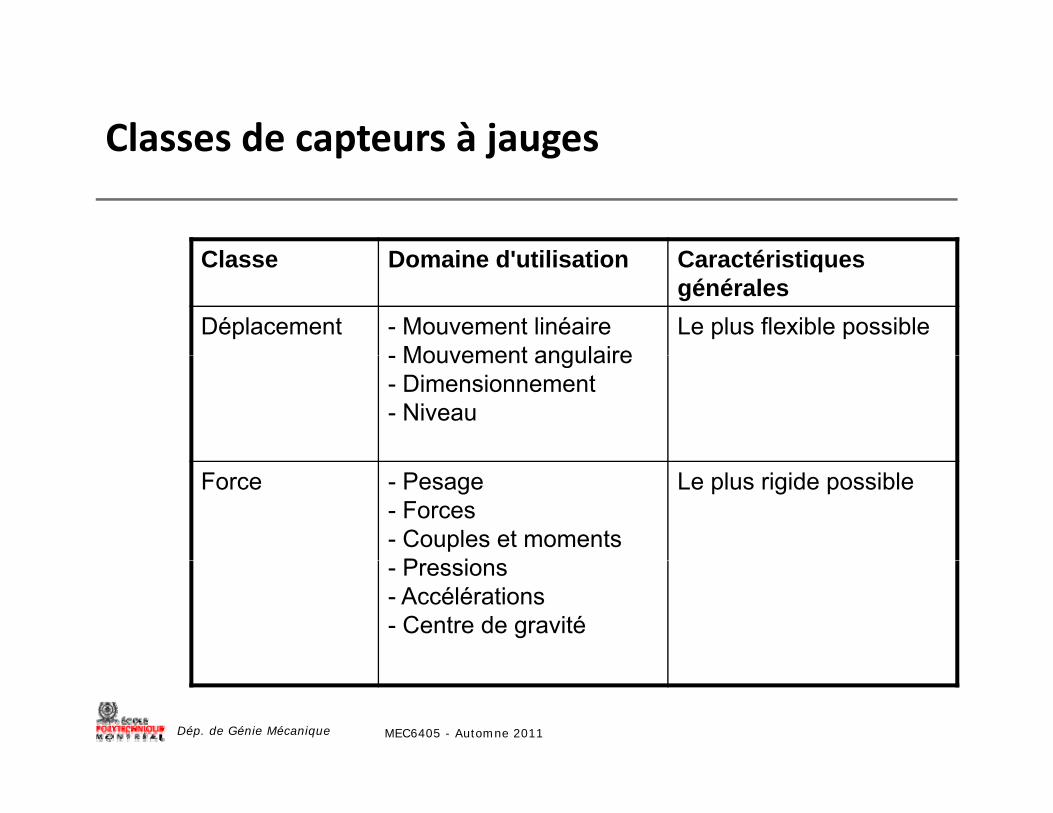
Classes de capteurs à jaugesClasses de capteurs à jauges
Cl D i d' tili ti C té i tiClasse Domaine d'utilisation Caractéristiques générales
Déplacement - Mouvement linéaireMouvement angulaire
Le plus flexible possible- Mouvement angulaire- Dimensionnement- Niveau
Force - Pesage- Forces- Couples et moments
P i
Le plus rigide possible
- Pressions- Accélérations- Centre de gravité
Dép. de Génie Mécanique MEC6405 - Automne 2011
Étapes à suivre pour la conception p p p
• Déterminer toutes les sollicitations pouvant affecter la pièce. Identifier la sollicitation principale, celle que l'on veut mesurer, et les sollicitations parasites, celles que l'on veut éliminer.
• Identifier la zone qui donnera les plus grandes déformations sous l'effet de la sollicitation principale. Déterminer toutes les sollicitations qui agissent dans cette zone.
• Localiser les jauges et les orienter préférablement suivant les axes principaux de déformations (pour la sollicitation principale). Se référer à l'annexe 3‐1 pour les formules de calcul des déformations.
Dép. de Génie Mécanique MEC6405 - Automne 2011
Étapes à suivre pour la conception (suite) p p p ( )
• Établir la disposition des jauges dans le pont de Wheatstone. La sollicitation principale est amplifiée au maximum et tous les effets parasites sont compensés (annulés).
• Le meilleur capteur est celui qui comporte un pont complet.
• Dresser le tableau de la réponse du pont en fonction de toutes sollicitations
• Calculer l'output théorique du pont.
• Vérifier que le capteur résiste aux efforts normaux et exceptionnels.
Dép. de Génie Mécanique MEC6405 - Automne 2011
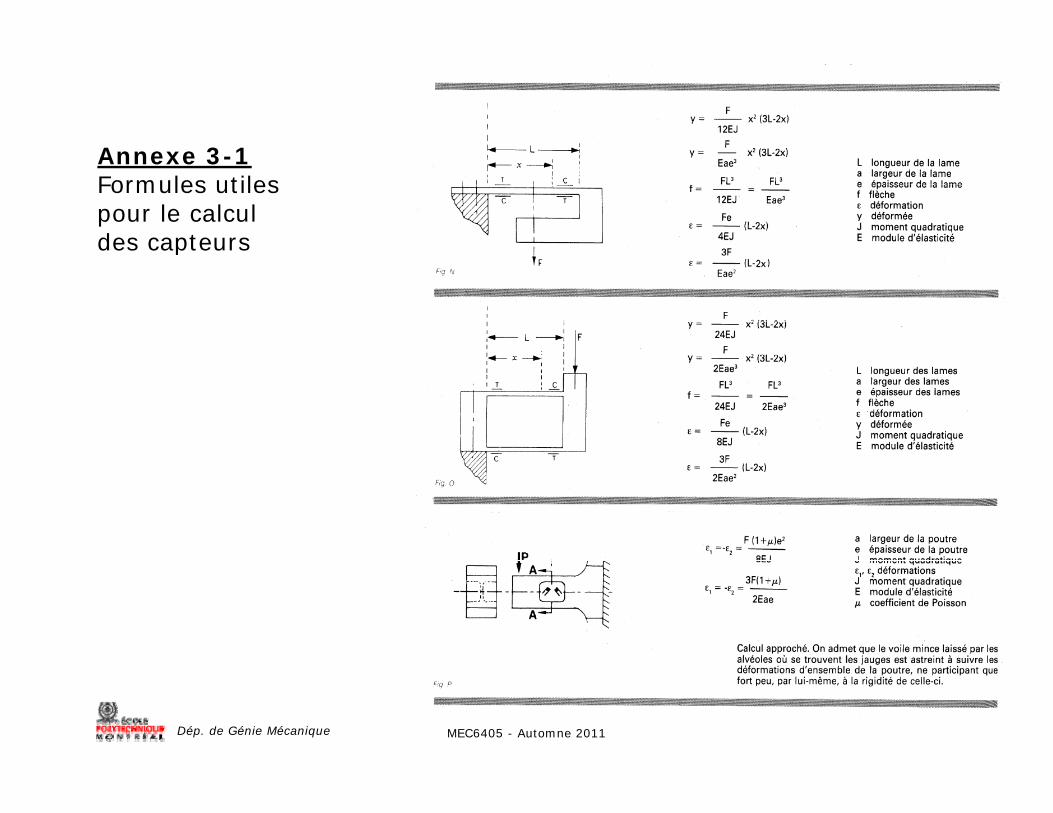
A 3 1Annexe 3-1Formules utilespour le calculdes capteursp
Dép. de Génie Mécanique MEC6405 - Automne 2011
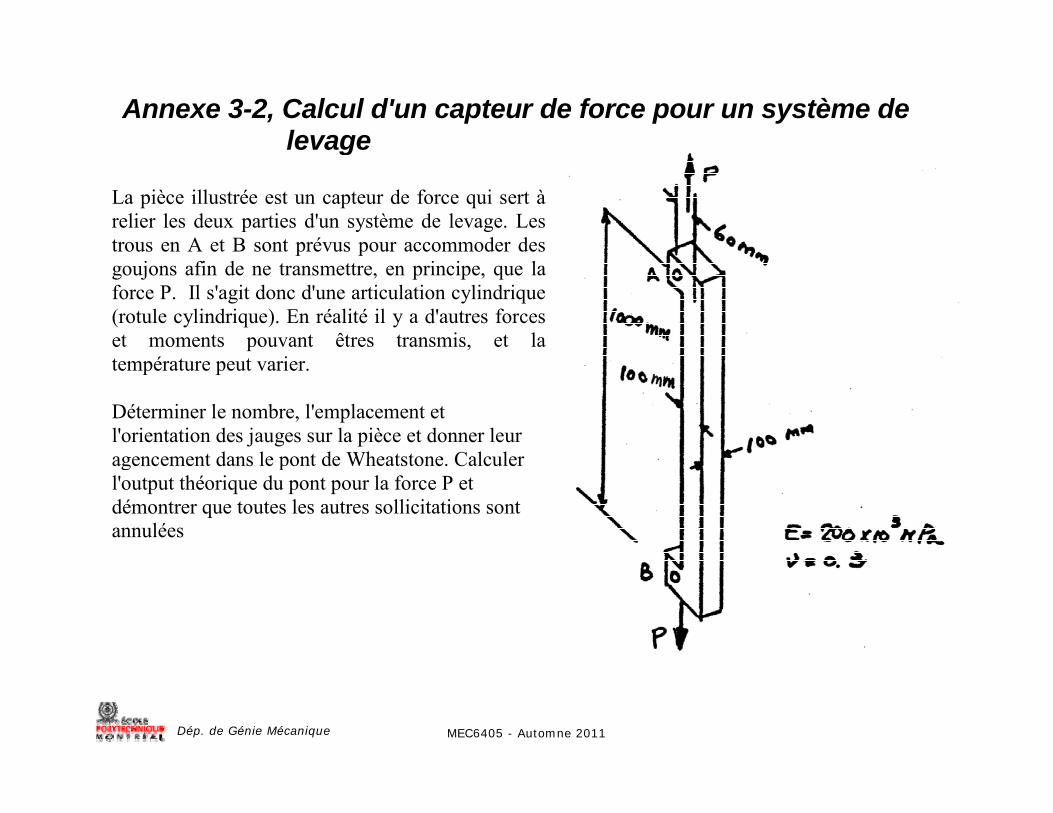
Annexe 3-2, Calcul d'un capteur de force pour un système de levageg
La pièce illustrée est un capteur de force qui sert à relier les deux parties d'un système de levage. Les trous en A et B sont prévus pour accommoder des p pgoujons afin de ne transmettre, en principe, que la force P. Il s'agit donc d'une articulation cylindrique (rotule cylindrique). En réalité il y a d'autres forces et moments pouvant êtres transmis, et la température peut varier. Déterminer le nombre, l'emplacement et l'orientation des jauges sur la pièce et donner leur agencement dans le pont de Wheatstone Calculeragencement dans le pont de Wheatstone. Calculer l'output théorique du pont pour la force P et démontrer que toutes les autres sollicitations sont annulées
Dép. de Génie Mécanique MEC6405 - Automne 2011
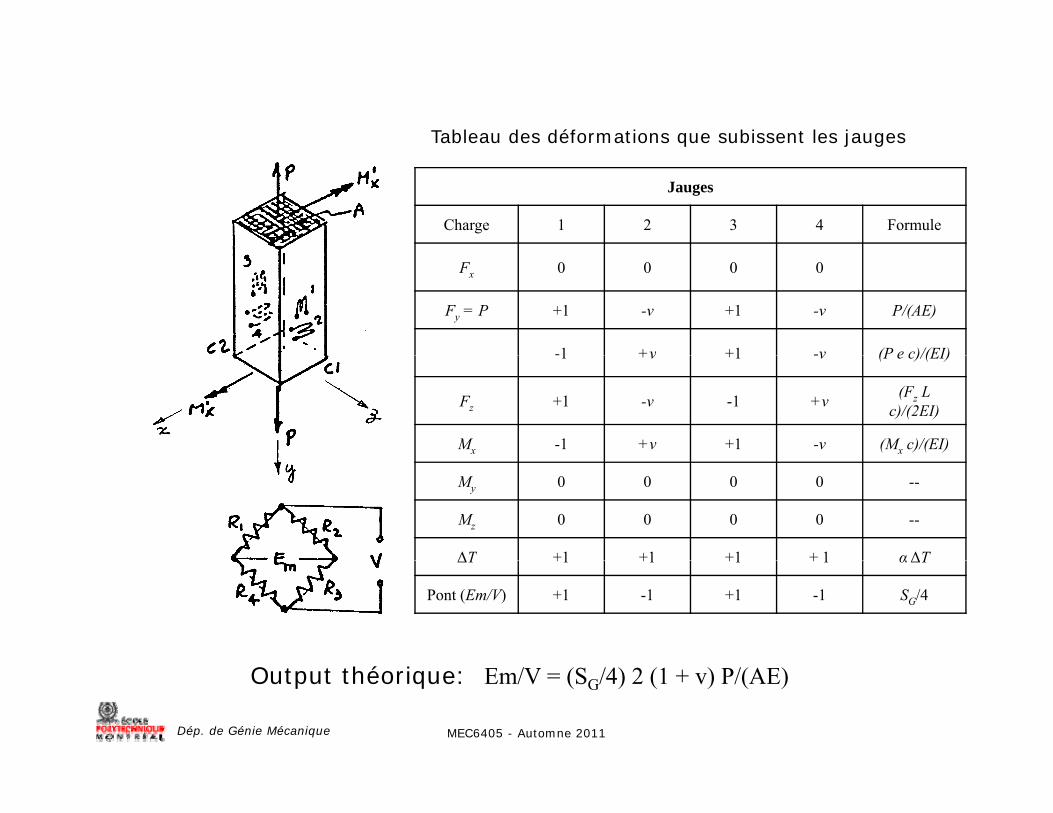
Tableau des déformations que subissent les jauges
Jauges
Charge 1 2 3 4 Formule
Fx 0 0 0 0
Fy = P +1 -v +1 -v P/(AE)
-1 +ν +1 -v (P e c)/(EI)1 +ν +1 -v (P e c)/(EI)
Fz +1 -ν -1 +ν (Fz L c)/(2EI)
Mx -1 +ν +1 -v (Mx c)/(EI)
My 0 0 0 0 --
Mz 0 0 0 0 --
ΔT +1 +1 +1 + 1 αΔTΔT +1 +1 +1 + 1 αΔT
Pont (Em/V) +1 -1 +1 -1 SG/4
Dép. de Génie Mécanique
Output théorique: Em/V = (SG/4) 2 (1 + v) P/(AE)
MEC6405 - Automne 2011
Laboratoire no. 4 C t à b d jCapteurs à base de jauges
Partie I, CAPTEUR POUR MESURE DIRECTE DU CISAILLEMENT
Une combinaison judicieuse des trois jauges de la rosette (poutrelle) permet la mesure directe de la déformation de cisaillement γxyγxy
– Réaliser cette combinaison
– Effectuer un essai et comparer les résultats avec les valeurs théoriques
– Ajuster le facteur de jauge de façon à obtenir un affichage directementAjuster le facteur de jauge de façon à obtenir un affichage directement proportionnel à la déformation de cisaillement
Dép. de Génie Mécanique MEC6405 - Automne 2011
Laboratoire no. 4 (suite)( )
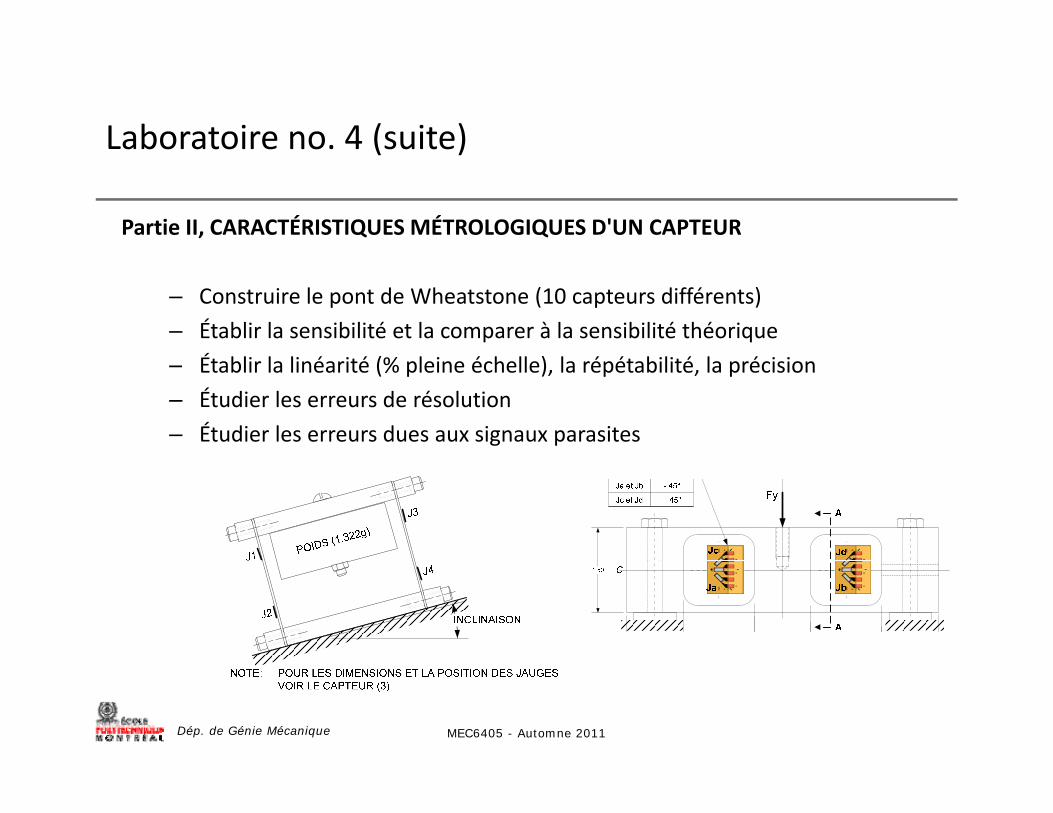
Partie II, CARACTÉRISTIQUES MÉTROLOGIQUES D'UN CAPTEUR
– Construire le pont de Wheatstone (10 capteurs différents)
– Établir la sensibilité et la comparer à la sensibilité théorique
É– Établir la linéarité (% pleine échelle), la répétabilité, la précision
– Étudier les erreurs de résolution
– Étudier les erreurs dues aux signaux parasites
Dép. de Génie Mécanique MEC6405 - Automne 2011
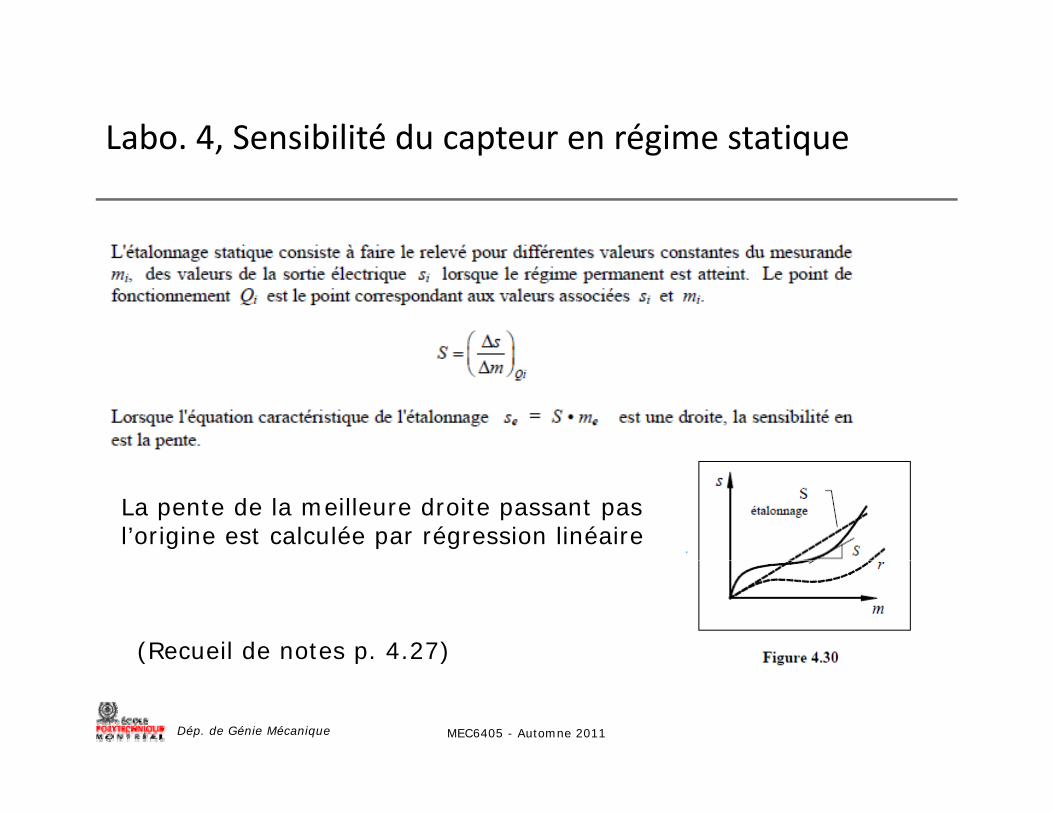
Labo. 4, Sensibilité du capteur en régime statique, p g q
La pente de la meilleure droite passant pas l’origine est calculée par régression linéaire
(Recueil de notes p. 4.27)
Dép. de Génie Mécanique MEC6405 - Automne 2011
( p )
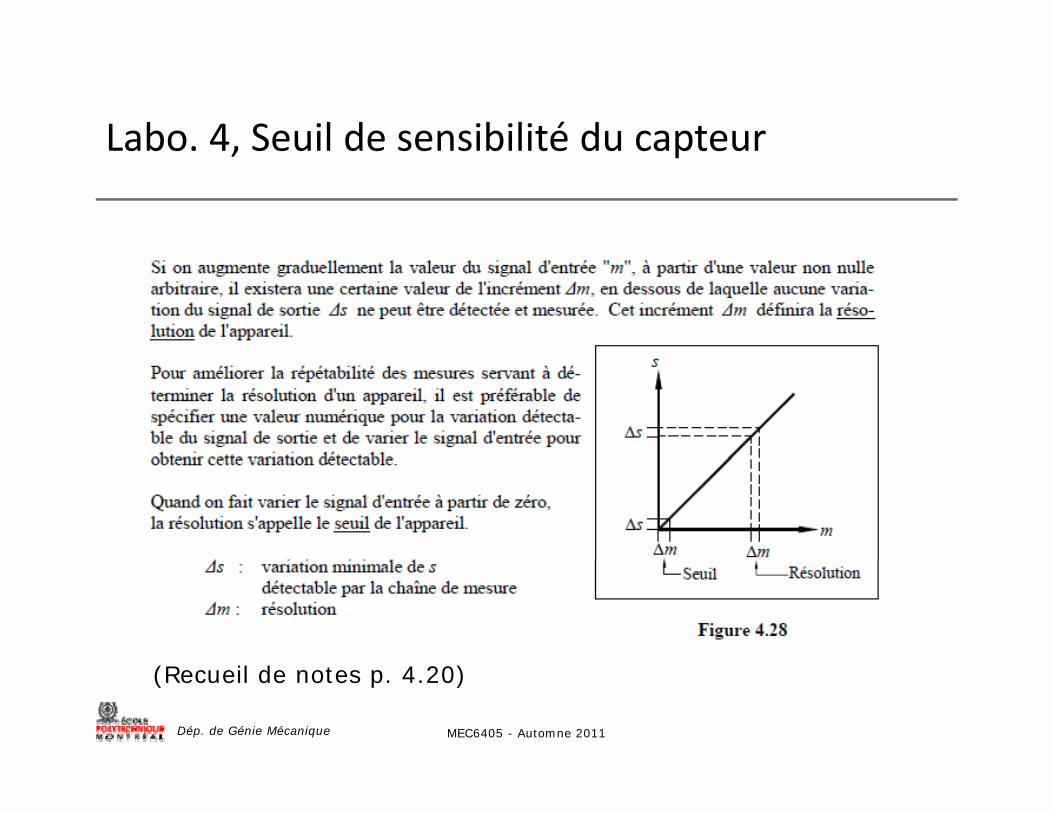
Labo. 4, Seuil de sensibilité du capteurLabo. 4, Seuil de sensibilité du capteur
Dép. de Génie Mécanique MEC6405 - Automne 2011
(Recueil de notes p. 4.20)
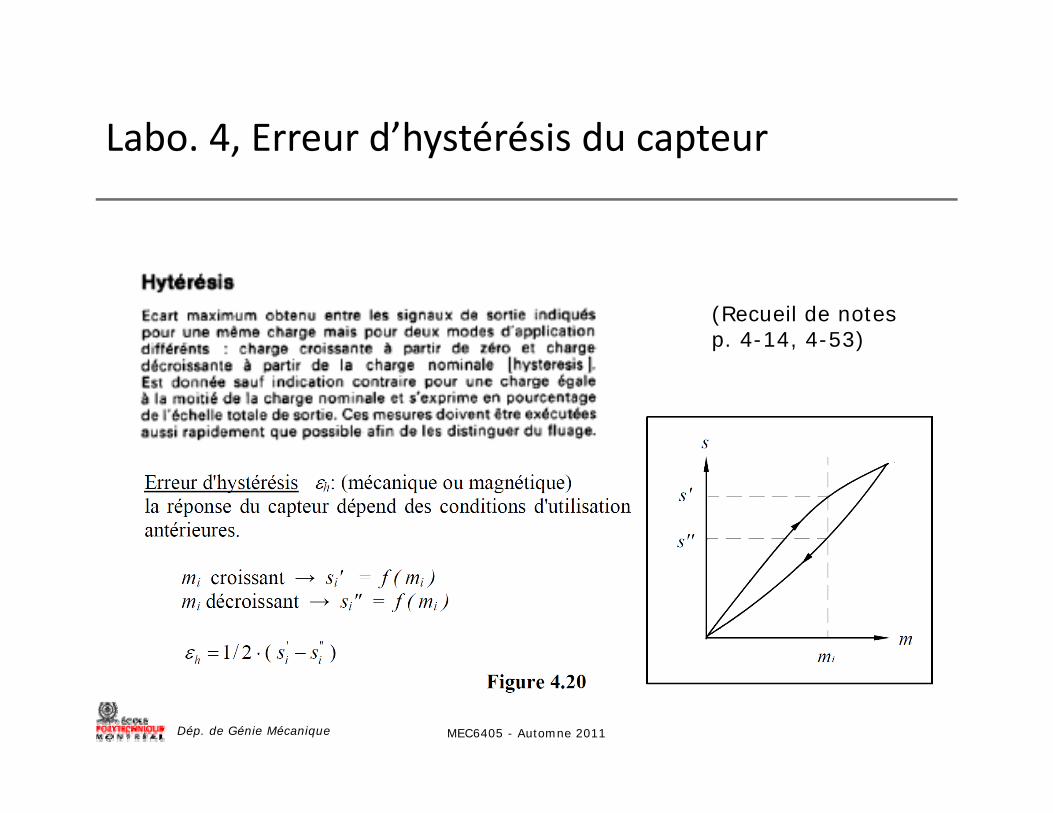
Labo. 4, Erreur d’hystérésis du capteurLabo. 4, Erreur d hystérésis du capteur
(Recueil de notes p. 4-14, 4-53)
Dép. de Génie Mécanique MEC6405 - Automne 2011
Labo. 4, Erreur de linéarité du capteurLabo. 4, Erreur de linéarité du capteur
(Recueil de notes p. 4-53)
Note:La droite de comparaison avec la courbe d’étalonnage est la meilleure droite obtenue par
l l d é icalcul de régression
Dép. de Génie Mécanique MEC6405 - Automne 2011
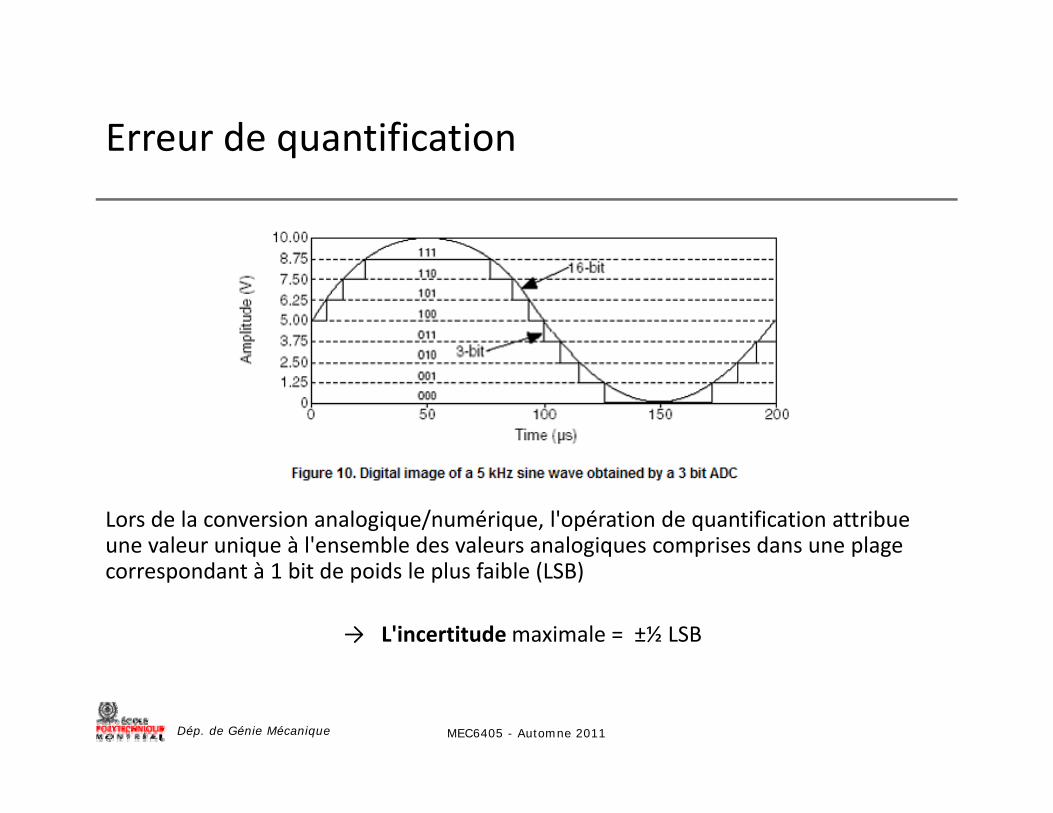
Erreur de quantificationErreur de quantification
Lors de la conversion analogique/numérique, l'opération de quantification attribue une valeur unique à l'ensemble des valeurs analogiques comprises dans une plage correspondant à 1 bit de poids le plus faible (LSB)
→ L'incertitudemaximale = ±½ LSB
Dép. de Génie Mécanique MEC6405 - Automne 2011
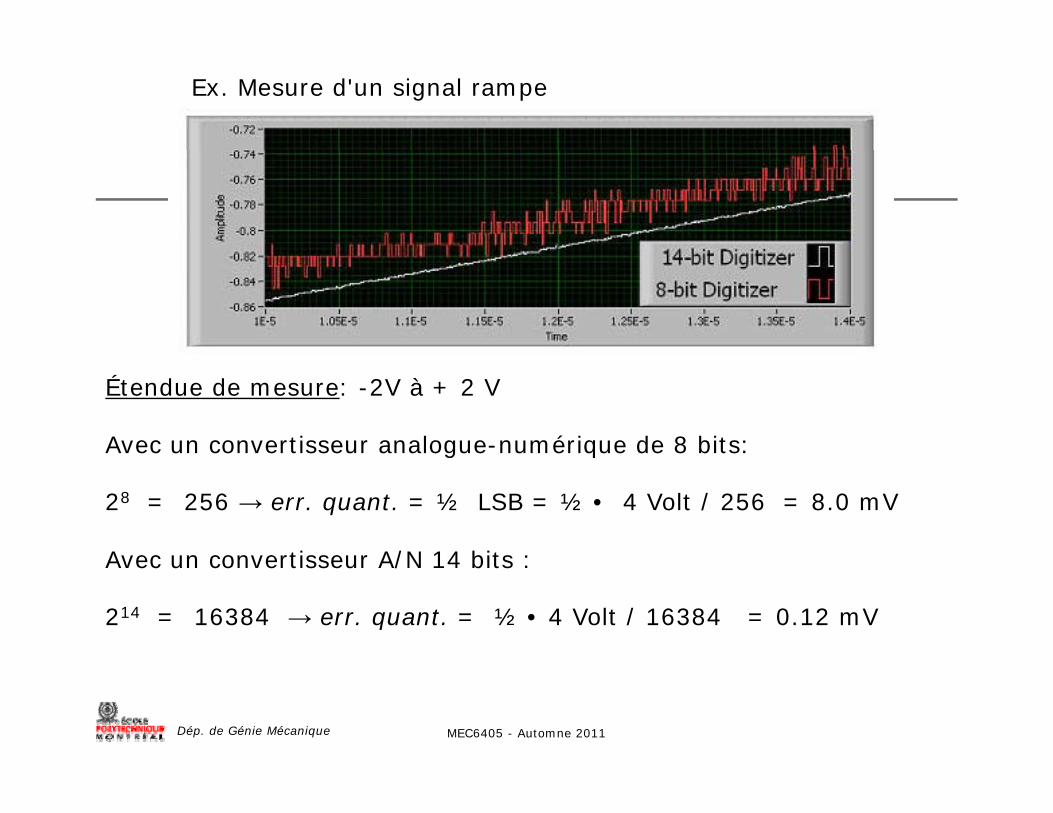
Ex. Mesure d'un signal rampe
Étendue de mesure: -2V à + 2 V
Avec un convertisseur analogue-numérique de 8 bits:
28 = 256 → err. quant. = ½ LSB = ½ • 4 Volt / 256 = 8.0 mV
Avec un convertisseur A/N 14 bits :Avec un convertisseur A/N 14 bits :
214 = 16384 → err. quant. = ½ • 4 Volt / 16384 = 0.12 mV
Dép. de Génie Mécanique MEC6405 - Automne 2011
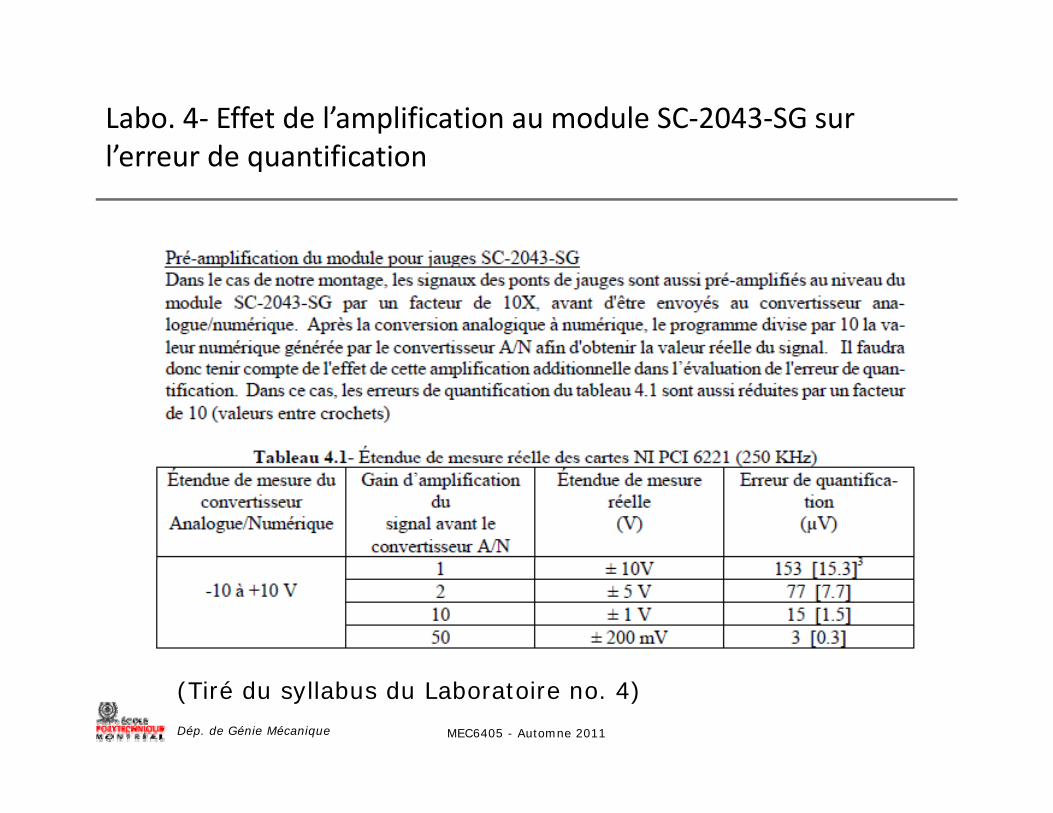
Labo. 4‐ Effet de l’amplification au module SC‐2043‐SG sur l’ d tifi til’erreur de quantification
Dép. de Génie Mécanique MEC6405 - Automne 2011
(Tiré du syllabus du Laboratoire no. 4)
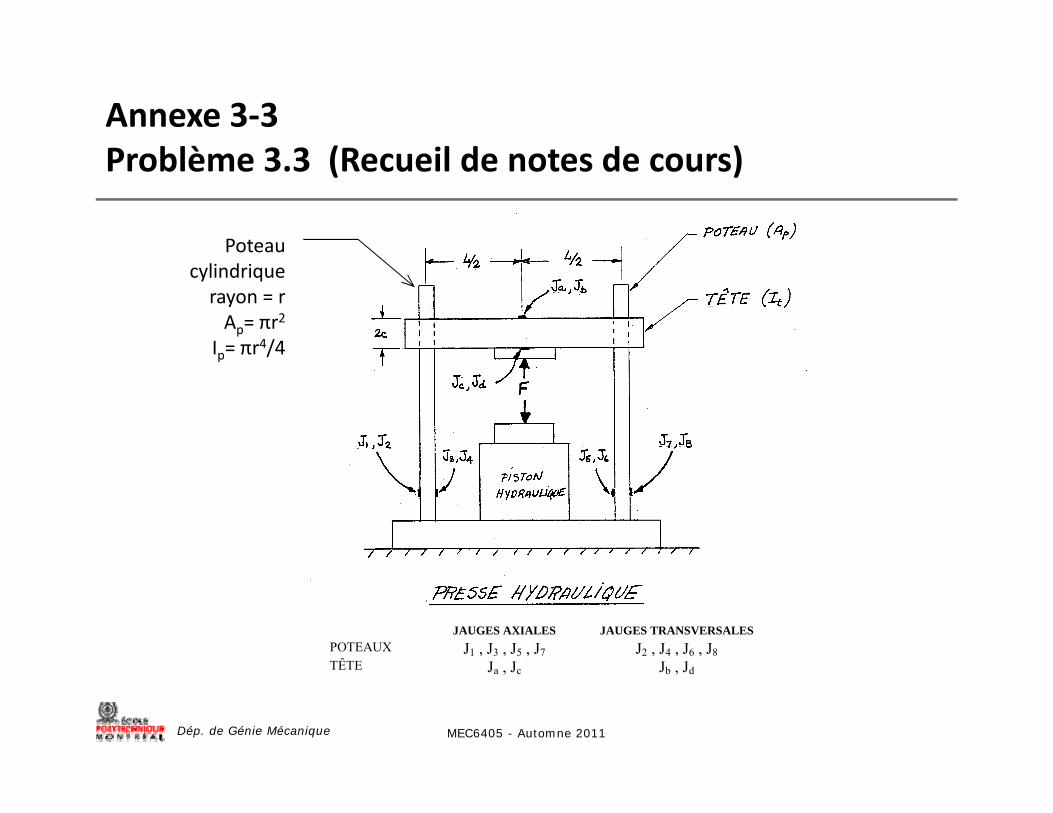
Annexe 3‐3P blè 3 3 (R il d t d )Problème 3.3 (Recueil de notes de cours)
Poteau cylindriquerayon = rAp= πr2
Ip= πr4/4p /
JAUGES AXIALES JAUGES TRANSVERSALES POTEAUX J1 , J3 , J5 , J7 J2 , J4 , J6 , J8 TÊTE J J J J
Dép. de Génie Mécanique
TÊTE Ja , Jc Jb , Jd
MEC6405 - Automne 2011
Dép. de Génie Mécanique MEC6405 - Automne 2011
Dép. de Génie Mécanique MEC6405 - Automne 2011
Dép. de Génie Mécanique MEC6405 - Automne 2011
Problème 3.3 (suite)( )
Mesurer à l'aide de jauges de déformation, la force appliquée par la presse hydrauliquehydraulique.
Deux solutions sont considérées :
1. Installer deux rosettes de 90° sur chacun des poteaux de la presse et relier toutes les jauges (deux poteaux) dans un seul pont de Wheatstone;
2 I t ll d j t d l têt d l fi d l fl i2. Installer des jauges au centre de la tête de la presse afin de mesurer la flexion de celle‐ci. Il y a une rosette de 90° sur le dessus et une autre sur le dessous de la poutre. Les jauges sont montées dans un seul pont de Wheatstone.
P d l di i i d j d l dPour ces deux cas, trouvez la disposition des jauges dans le pont de Wheatstone pour la mesure de la force de la presse et calculez l'output théorique des ponts de Wheatstone.
Dép. de Génie Mécanique MEC6405 - Automne 2011