PMdrives part3

of 17
Transcript of PMdrives part3
-
7/29/2019 PMdrives part3
1/17
Advance AC Drives 2009
Department of Electrical and Electronic Engineering
Advanced AC Drives
Permanent Magnet Machine Drives
Dr. Chris Gerada
-
7/29/2019 PMdrives part3
2/17
Advance AC Drives 2009
Part III
Control of PMSM Drives
V/F control
Basic Vector Control
MTPA control
Field Weakening
-
7/29/2019 PMdrives part3
3/17
Advance AC Drives 2009
Operating PM synchronous machines
The basics for operating BLAC drives are very similar to those for operating InductionMotor drives.
The main differences are :
The rotor field in PMSM rotates synchronously with the rotor, thus there is no slip like IM The main air gap field in PMSM is produced by the magnet and thus there is no need for a
magnetising current. This implies :
A) operation with a high power factor (no need for an id)
B) cannot switch the field off; need a demagnetisation current to weaken the field
PMSM can be salient.
PMSM in their basic form are not able to operate from a fixed voltage and frequency supply. Whensuch operation is required a squirrel-cage can be incorporated in the rotor to start the machine up.Once it reaches synchronous speed the cage is ineffective.
In the majority of applications PMSM are operated from power electronic converters andthere are basically 3 control strategies which can be adopted :
Open-Loop V/Hz Control
Closed Loop Control
Constant flux (id=0)
Controlled flux (id finite) MTPA control
-
7/29/2019 PMdrives part3
4/17
Advance AC Drives 2009
V/Hz open loop control
No speed or position sensor required.
By increasing smoothly the supplied frequency from a value close to zero to the ratedspeed, the motor will run synchronously during the entire starting period. The voltageneeds to be increased proportianally to the frequency to match the back emf increasingwith speed.
The rate of change of frequency will depend on the inertia of the drive. If rate of change isset high the machine will not start and large torque oscillations occur.
The open loop nature of this control scheme makes it poor in transient performance.
The speed of the PMSM can however be precisely controlled by the excitation frequencywithout slip compensation as for IM.
Can be easily supplied from a general purpose V/Hz IM drive.
Cage winding can be used to improve stability and start-up.
d
-
7/29/2019 PMdrives part3
5/17
Advance AC Drives 2009
Closed loop vector control of PMSM (id=0)
As we have previously seen the torque produced by a PMSM can be expressed as :
( )q d q d qe
kT I E I I X X
= +
Magnet alignment
component
Reluctance
component
For non-salient machines such as for surface mount PMSM, the second component is zero,thus:
q q f
e
kT I E k I
= =
Having E fixed by the magnet flux linkage, Torque is directly proportional to the q-axiscurrent component.
This provides for a simple way of controlling non salient PMSM :
This control strategy is also often used with salient PMSM. In principle it works well,
however it would not operate at its full potential as the second torque component, ie thereluctance torque component is not utilised.
The reluctance torque component is also highly non-linear as we will see later on andusing it effectively can be quite difficult especially if machine data is not available.
The control structure employed is very similar to that of IM.
0,d qI I T=
Ad AC D i 2009
-
7/29/2019 PMdrives part3
6/17
Advance AC Drives 2009
Closed loop vector control of PMSM (id=0)
As we have previously seen the torque produced by a PMSM can be expressed as :
Advance AC Drives 2009
-
7/29/2019 PMdrives part3
7/17
Advance AC Drives 2009
Closed loop vector control of PMSM (MTPA)
For maximum efficiency, a maximum torque per amp (MTPA) control strategy should beused. (assuming copper losses are dominant)
This utilises the reluctance torque component of salient machines.
As we have seen the angle should be advanced to archive this. ( i.e. utilise negative id)
As we previously observed the angle ofadvance, (or the magnitude of id) is a functionof the supply current. This is expectable sincethe reluctance torque, for a given angle ofadvance is proportional to the current squaredwhilst the magnet torque is only proportional to
the current.
The optimum angle of advance is also a functionof the saliency ratio, and the magnet fluxlinkage which in an ideal machine are fixed.
Knowing the above parameters, relationshipsbetween T, iq and id for MTPA operation can bederived.
2 2 2
1
max
8sin
4
a
T
a
E E I X
X I
+ =
Advance AC Drives 2009
-
7/29/2019 PMdrives part3
8/17
Advance AC Drives 2009
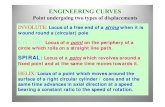
Torque Loci
If we calculate for various values of Iaand substitute in the equations below :
maxT
( ) ( )( )2
cos sin 22
aa d q
e
IkT EI X X
=
( )cosq aI I = ( )sind aI I = We can then plot Torque loci as a function
of the d- and q- axis current components
The first figure shows such a locus for a non
salient machine. As one expects the locusis on the q-axis as the d-axis currentcomponent would not produce any torque.
At the other extreme, if we had no
magnets, (ie having a synchronousreluctance machine) the angle fro MTPAwould be such that -id=iq for any T
The torque produced by a salient PMSM is ahybrid of the above, thus the locus will bein between the two loci above
[ ]1max sin 0T=
1
max
1sin
2T
=
Torque locus for a non salient machine
Torque locus for a synchronous reluctance machine
(salient PMSM without magnets)
Advance AC Drives 2009
-
7/29/2019 PMdrives part3
9/17
Advance AC Drives 2009
Torque Loci
Since the saliency torque increases withI2, the actual torque maximum of thesalient P.M. machine movesasymptotically towards 135 as iincreases.
However, for low values of i, thesaliency torque is small compared tothe field torque (3PEi/w). Consequentlythe locus of i starts from zero andmoves along the iq (90) axes.
We can also plot id and iq as a functionof toque to give us the MTPA
field
-Tgenerating
+Tmotoring
qi
di
0
0
loci of i formaximumtorque per
amp1350
Advance AC Drives 2009
-
7/29/2019 PMdrives part3
10/17
Advance AC Drives 2009
Torque Mapping Functions
The process is simple - given a requiredtorque, look up values of id and iqnecessary to obtain this value.
0
0 +Tmotoring
-Tmotoring
0
i
( )q qi f T=
( )d di f T=
Advance AC Drives 2009
-
7/29/2019 PMdrives part3
11/17
Advance AC Drives 2009
Closed Loop Control MTPA Scheme
The process is simple - given a required torque, look up values of id and iq necessary toobtain this value.
Advance AC Drives 2009
-
7/29/2019 PMdrives part3
12/17
Simple or MTPA Control?
Mainly depends on how large the reluctance torque component is in relation to themagnet component and how well the variation of the inductances are known to derivethe mapping functions.
Note that all the mapping functions discuseed are pased on constant Ld and Lq. Theextra information on how Ld and Lq change with magnetic saturation may cause
problems for drives where the power electronics is "general purpose", since extra effortwill be required to set up the drive.
To achieve simple control, all that is required is to control iq so that T iq.
Example of Parameter Variation for a Burried Magnet PMSM :
Note : The larger bridge depth increases saliency (higher Lq) but results in larger magnet
leakage flux. Saliency ratio changes by more than 30% over load range
Advance AC Drives 2009
-
7/29/2019 PMdrives part3
13/17
Field Weakening
As the machine speeds up the back emf Eincreases:
This is the same concept for requiringfield weakening in DC machines.
The main difference is that in this casewe do not have a field winding and therotor field is set by the magnet.
When E approaches the maximumvoltage the inverter can supply,
operation in the simple mode with id=0 isno longer possible.
Consider the phasor diagram with amachine operating in the field weakeningregion. It illustrates motoring operationwith E greater than V.
Id is principally responsible for thedemagnetisation effect.
However, this requires an increasedphase current which is not used for
torque and so reducing the powercapability of the machine if i is limited.
There are two limiting conditions : the maximum available inverter voltage.
the maximum inverter or machine current.
e fE =
Advance AC Drives 2009
-
7/29/2019 PMdrives part3
14/17
Voltage and Current Limits
In order to understand the concepts behindPMSM field weakening we will take a numberof simplifying assumptions.
We will assume a non salient machine andneglect stator resistance drops.
We will use the id-iq plane to plot the limitsof the operating region for given current andvoltage limits.
As we have already seen the phase current is
equal to this translates into a circlewith the value of the rated current as radius.
If we look at the Voltage Equation in steadystate :
( ) ( )222
d e q eV E L I L I = +
d qL L L= =
( )2 2
2f
d q
e
VI I
L L
= +
This represents an offset circle in the id,iq
plane with centre point and radius being :
f
diL
= 0qi =
e
Vradius
L=
Advance AC Drives 2009
-
7/29/2019 PMdrives part3
15/17
Voltage and Current Limits
In order to understand the concepts behind PMSM field weakening we will take anumber of simplifying assumptions.
Advance AC Drives 2009
-
7/29/2019 PMdrives part3
16/17
Voltage and Current Limits
The voltage limit circles get smaller as wm increases. If wm=wm2 then the currentcan only have the value in the shaded region,
Under this condition, most of the current is used to deflux the machine (id) and verylittle current is available for torque (iq). Hence the falling torque curve as wmincreases.
If the origin of the voltage limit circle lies on the current limit circle (or inside it) themachine is theoretically capable of infinite speed - but zero torque (see diagram onnext slide).
The voltage limit circle which cuts the origin of the current plane is the case wherevmax = E. With only iq control, this is the condition of zero torque and current (wm2
condition for diagram on next slide) . As the voltage limit circle cuts the optimum torque/amp locus it is necessary to reduce
the iq component and increase id. This has the effect of advancing the angle g.
A high L is needed to achive fwf
di L
=
Advance AC Drives 2009
-
7/29/2019 PMdrives part3
17/17
Voltage and Current Limits
In order to understand the concepts behind PMSM field weakening we will take anumber of simplifying assumptions.