PMdrives part2

of 24
Transcript of PMdrives part2
-
7/29/2019 PMdrives part2
1/24
Advance AC Drives 2009
Department of Electrical and Electronic Engineering
Advanced AC Drives
Permanent Magnet Machine Drives
Dr. Chris Gerada
-
7/29/2019 PMdrives part2
2/24
Advance AC Drives 2009
Part II
Permanent Magnet Synchronous
Machines Types, Geometry andConstruction
PMSM Topologies Torque and Machine Size
Pole Number
Rotor Topologies Stator Windings
Back EMF
Armature Reaction Effects Torque and Torque Density
-
7/29/2019 PMdrives part2
3/24
Advance AC Drives 2009
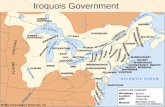
PM Synchronous machine types
PMSM come in various forms. Whilst allmachines can be represented by thesame equivalent circuit and aregoverned by the same principles ofoperation, different machine topologies
have different properties. Generally speaking PMSM construction
fall into one of three categories(according to the flux direction) :
Radial most common form of PM
machine type. They can either have aninterior rotor structure or an outer rotorin applications such as wheel motors.
Axial an attractive alternative due toits pancake shape, compactconstruction and high power density.
Particularly suitable for electrical andhybrid vehicles and wind generators.They can be designed as double-sidedor single sided machines with or withoutarmature slots.
Transverse this is when the velocityvector is transversal to the fluc path.This machine is ideal for low speedgenerators (high pole numbers)
In this Course we will be looking at radial type PMSM
Radial
Axial
Transverse
-
7/29/2019 PMdrives part2
4/24
Advance AC Drives 2009
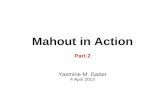
PM machine construction basic definitions
Consider the 3 phase 2 pole motor shown.
Construction details: Interior rotor
Laminated Stator with a stacking factor of 0.9
Solid Rotor
Surface mount magnets
Non-salient machine Ld=Lq
Parallel magnetisation
2 poles (1 pole pair) 1mm air gap length
48 slots or 8 slots/pole/phase
Single layer wound
magnet span
No of conductors per slot = 26
Conductors per phase : 26*8*2 = 416
Turns per phase : 416/2 = 208
Slot fill = Copper area in slot / slot area
wtooth width t
wtooth pitch
26 conductors per slot
magnet span
magnet thickness air gap length
d
-
7/29/2019 PMdrives part2
5/24
Advance AC Drives 2009
PM machine basics of torque production
Diagram
Construction details:
Ad AC D i 2009
-
7/29/2019 PMdrives part2
6/24
Advance AC Drives 2009
Power Rating and Size
The most basic question one needs to answer when specifying a machine for a particularapplication is what rating need it be? And how big will it be?
The most universal way to describe the output from a machine is via its power.
Power :
Thus if we want more power from a given motor the simplest thing to do is to make it runfaster!
Having the machine running faster will imply a larger BEMF and thus an appropriateconverter able to handle the voltage. There will be more iron losses in the machine andhigher converter switching losses. The maximum speed a motor can reach is also limited
by the mechanical integrity of the system.
To match the motor speed to the application requirements mechanical gearing is used.Whilst mechanical gears are much more torque dense than electrical machines, the higherthe gear ratio the lower will be the transmission efficiency and the reflected motor inertiawill be proportional to the gear ratio squared.
Increasing the torque implies a higher current supplied to the machine. The maximumcontinuous current is obviously limited by the maximum temperature the various machinecomponents can withstand.
Starting from basics, we will derive the torque and power produced by an electricalmachine in terms of its geometry to define the relationship between torque produced and
the main dimensions of a machine.
P T =
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
7/24
Advance AC Drives 2009
Machine Loadings
Magnetic Loading : Bpk
Defined as the peak radial flux density in the air-gap of the machine. This is for the fundamental, spatial flux density. Ie. harmonics neglected.
This is typically around 0.8T. having a tooth width half the tooth pitch and a typical B in theteeth of 1.6T (limited by magnetic steel saturation)
Current Loading or Electric Loading :Arms
Defined to be the total rms current per unit length of the airgap periphery.
D = air gap diameter
2mNphI = Nph turns per phase * m number of phases (3) * 2 conductors per turn * RMS current This is generally limited to 30-80kA/m, depending on machine size and cooling method.
2 phrms
m N IA
D
=
Current Density : Jrms Density of current in windings.
This is typically limited to around 4-6A/mm2
We will derive the output torque equation in terms of the machine geometry. We willassume a sinusoidal winding and air gap flux distribution, in other words this analysis isvalid for sinusoidally excited machines such as IM and PMSM.
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
8/24
Advance AC Drives 2009
Torque Produced
Assuming a sinusoidal distribution of flux density and current we canexpress them as :
From Lorentz equation, force on acurrent carrying conductor in anorthogonal field is :
T BL I r =
T
I Ar = F BIL= And the torque produced at a radius r
is :T BILr=
Consider the figure shown :
( ) sing pkB B =
( )gB ( )I
Then we can express the torque developed by the machine as :
( ) ( )2
0
m gT B I L r d
=
being the phase shiftbetween the flux and currentwaveforms
( ) ( )2
2
0
2 sin sinm ms pkT A B L r d
= +
( ) ( )2 sinrmsI A r = +
( )22 cosm rms pkT A B r L =
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
9/24
Advance AC Drives 2009
Torque Produced
The torque equation can be written as :
( )22 cosm rms pkT A B r L =
Torque = k * Electrical Loading * Magnetic Loading * Rotor Volume
The torque per rotor volume (TRV) is thus : 2 rms pkTRV A B= assuming 0 =
The TRVis related to the air gap shear stress . This is defined as the tangential (torqueproducing) force per unit swept rotor surface area. Thus, for a cylindrical rotor we canwrite:
( ) 2m rT D L r V = =
2mTTRVV
= =
2
rms pkA B
=thus
The air gap shear stress is measuredin kN/m2 .
It can be noted that the only wayhow to increase the TRV or the shearstress is by increasing either thecurrent or magnetic loading. Theseare limited by the cooling capabilityand saturation of the magnetic
material. Typical values are :222 /kN m =
344 /TRV kNm m=
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
10/24
Advance AC Drives 2009
Maximum TRV
The TRV can thus be improved by : Increasing B
Flux density is limited by the magnetic material saturation. Magnetic saturation in thestator teeth limits the tooth flux density to approx 1.6T so that the air gap flux densitydoesnt exceed 0.8T independent of machine size. One way of increasing this is by using
more exotic magnetic steels such as Cobalt Steel. This is only used in highperformance motors such as those for aerospace. Saturation flux densities above 2.2Tcan be reached.
Increasing A Increase the slot depth (for a given current density): increases slot leakage, increases
tooth mmf drop, increases machine outside diameter
Widen the slots (for a given current density): reduces slot leakage but reducesmagnetic loading as the teeth become narrower
Increase current density J increases I2R loss. Better cooling required.
Improving machine cooling by using forced convection or direct liquid cooling canconsiderably improve the TRV by 4 to 5 times
The values given so far relate to continuous rating. The peak torques a machine canachieve can be considerably higher than these. This in general depends on the dutycycle involved. This is again related to the thermal limit of the machine. Other
limitations might be magnet demagnetisation due to the armature reaction field if thecurrent is very high, converter ratings or to the mechanical integrity of the machineitself.
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
11/24
Advance AC Drives 2009
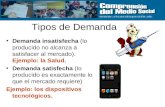
Pole number
With inverter driven PMSM machines thechoice of the number of poles is not obviousas with other traditional machines andapplications.
Induction motors have generally low polenumber due to the otherwise very lowmagnetising inductance, power factor andefficiency. This is not the case for PMmachines as there is no need for anexcitation current. High pole numbermachines are thus ideal for low speed, direct
drive applications. Using a higher number of poles allows an
increase in the air gap diameter for thesame stator outer diameter since less spaceis needed for the stator yoke (Torque airgap diameter2)
Consider a 2 and a 16 pole machine of sameouter stator dimensions.
Higher torque (more force producing surfacearea acting on a larger radius)
Less stator copper losses as end windinglength is reduced.
More iron losses (Hysteresis and Eddy) ~Mass x f2
Higher inverter switching losses
2e mP =
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
12/24
Producing a Sinusoidal Air gap Flux DensityMagnet Span
We have already described the ideal fundamental airgap flux density for a PMsynchronous machine as : and we have also mentioned at the beginning ofthe course that this is usually achieved by having the magnets spanning approximately1200
The reason behind using this magnet span is that it gives us a relatively high fundamentalflux density component (which is the toque converting component) with minimum otherharmonic components (which induce torque ripple, current ripple, extra loss andsaturation) as well as with minimum magnet material (which is comparatively veryexpensive)
Considering a surface mount magnet spanning electrical degrees. We can approximate
the magnet flux density as shown in the figure below. The fundamental airgap fluxdensity is then given by :
( ) sing pkB B =
0 100 200 300 400
1
-1
Electrical angle (deg)
FluxDensit
y(T)
2
0
1 4 4sin cos sin
2 2pk a a aB B d B B
= = =
aB
Note that as the magnet span increases from1200 to 1800 the Magnetic loading increasesby 15%, however, volume and cost increaseproportionally to span (50%). Total flux alsoincreases proportionally with span, which
determines core back depth.
Advance AC Drives 2009
d i Si id l i l i
-
7/29/2019 PMdrives part2
13/24
Producing a Sinusoidal Air gap Flux DensityRotor Types, Magnet Placement and Saliency
As indicated by the previous slide the purity of the magnet flux distribution depends onthe magnet shape. This will in turn affect the purity of the back-emf which should be asnear a sine wave as possible.
Different rotor structures can be employed to enhance the shape of the air gap flux,produce different magnitudes of saliency as well as to protect the magnets from armature
reaction effects. Various 4-pole rotorconfigurations.
a) Surface mount configuration - NS
b) Inset configuration (small S)Ld
-
7/29/2019 PMdrives part2
14/24
Comparing Surface and Buried Magnet rotors
Most of the leakage flux is lost in the rotor bridges as shown below. Having a high Lq aconsiderable amount of armature reaction occurs, weakening the characteristics of themachine, as we noted in the very beginning of this course. In general, the permanentmagnet material is best utilised in surface mount PM machines. Consider a surface and aburied magnet rotor configuration :
Surface Mount Type
Large airgap better magnet utilisation,lower losses (especially rotor)
Higher Torque density
Low inductance Potential magnet Demagnetisation
Needs a retaining sleeve
Buried Magnet Type
High Magnetic Inductance limits SCcurrent and ideal for Field Weakening
Saliency Torque Component
Armature reaction effects can be quite high Higher Rotor Losses
Robust construction
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
15/24
Calculating the Induced Back EMF
The fundamental flux (only due to magnet) per pole can be expressed as :
0
2sinp pk pk
xL B dx B L
= =
where , the polepitch is :
D
P
=
The peak flux linked is :
pk ph p wN k =
Then, the induced BEMF :
( )( )
( )cosph p wd t
E t N k tdt
= =
( ) ( )or sinph p wt N k t =
2rms ph w pE f N k =
2 2rms w ph pkD
E f k N B LP
=
or :
Substituting in the equations above :
Diagram Showing winding factor
(if we assume a concentrated coilspanning the whole pole pitch kw=1)
-
7/29/2019 PMdrives part2
16/24
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
17/24
Armature Field and phase inductance
Apart from the magnet induced field we also have the armature induced flux. This has 2components, a leakage and a magnetising component.
The flux and flux linkage will have different values in the d- and q- axis due to saliency.
Recall that :
Inductance is defined as :
q lq mqL L L= +
d ld mdL L L= +
LI
=
We assumed that the Lld Llq. Magnetising flux crossing the airgap
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
18/24
Armature Field and phase inductance
Apart from the magnet induced field we also have the armature induced flux. This has 2components, a leakage and a magnetising component.
d
q
d
q
q
d
q
f
d dL I =
q qL I = q f
r
machine flux
due to magnetsalone
machine flux
due to armature
current aligned
with the d-axis
machine flux
due to
armature
current aligned
with the q-axis
alone
machine flux
due to magnet
magnetic field
and armature
current aligned
with the q-axis
d
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
19/24
Armature Field and phase inductance
If we consider a phase winding alignedwith the d-axis, the peak fundamentalMMF acting on the air gap is :
_
42
2
ph
pd pk w ph
NMMF k I
P =
The peak flux due to the above MMF (assumingno leakage) :
_ 0
_
42
2 2 '2
pd pk ph
pd pk w phag d
MMF N Lk I
P g
= =
( )0
_
22
/2 '
ph w
pd pk ph
d
N k LI
P g
=
Following from the above, by dividing the peak valueof the air gap flux linkage by the peak vale of thephase current we obtain the phase inductance :
( )( )
2_
02
2
4/2 '2
w pd pk
ph wpdpd
ph dph
N k N kLL
I P gI
= = =
' is the effective d-axis airgap
this takes into account the physical airgap,
magnet thickness, saturation and slotting.
2is the form factor. If saturation was to
be accounted for another value needs
dg
to be used
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
20/24
Armature Field and phase inductance
For an m=3 phase machine, the other windings also affect the flux linkage (mutualinductances) and thus the actual magnetising d-axis inductance is :
( )( )
2
02
2
2 /2 '
ph w
md pd
d
N k Lm mL L
P g
= =
can be similarly calculated by employing as the air gap equivalent length.mqL 'qg
q lq mqL L L= +
'
'
Md d c sat
recoil
q q c sat
hg g k k
g g k k
= +
=
Relations for calculating the leakage inductances will not be discussed here as they are
beyond the scope of this course. The flux leakage in the d- and q- axis is often assumedequal (as we did in patrt 1 of this course), although the length of the air gap also affectsthe flux leakage as a component of this crosses the air gap and links with the rotor.Generally speaking the flux leakage of the q-axis is lower than that of the d-axis for salientPMSM.
,
c
sat
sat
are the mechanical clearances in the d- and q-
axis respectively, k is the Carter's coefficient for
the air gap ( 1.08) and k is the saturation coefficient
k 1.
d qg g
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
21/24
Peak Torque and Magnet Demagnetisation
The maximum continuous (or under a reduced duty) torque a PMSM can produce islimited by thermal considerations.
The maximum instantaneous current will however be limited by magnet demagnetisation.The limit on the iq demand must be below that which demagnetised the magnet.
Consider the armature reaction MMF created by a q-axis current :
Flux density due tostator current
0 100 200 300 400
1
-1
Fluxde
nsity(T)
Electrical angle (deg)
Flux density due tomagnets
Increasing p increases the maximum current allowed
Increasing the magnet depth also allows an increase in the max. allowed current.
The maximum torque achieved without demagnetizing the magnet is independent
of the magnet span.
Burying the magnet protects from demagnetization
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
22/24
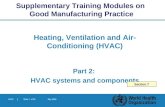
Surface Mount Configuration
Surface mount machines are prone to demagnetisation
Potential Demagnetization of themagnet trailing edge is evidentwhen a high armature current is
applied.
Flux density map of a 6pole surface
mount pmsm at no load
Flux density map of a 6pole surface mount
pmsm at max loading (Id=0, Iq=Imax)
Leading edge Trailing edge
Advance AC Drives 2009
-
7/29/2019 PMdrives part2
23/24
Buried Magnet Configuration
With a buried magnet configuration the peak torque can be considerably increased
Note the heavily saturation on the rotor pole tips, this reduces the air gap flux.
Also note that the phase inductance increases considerably.
Flux density map of a 6pole buried
magnet pmsm at no load
Flux density map of a 6pole buried magnet
pmsm at max loading (Id=0, Iq=Imax)
Advance AC Drives 2009
C l i
-
7/29/2019 PMdrives part2
24/24
Conclusions
We looked at the derivation of the machine constantsd and construction aspects of pmsm