Photometric Stereo by Learning -...
1
Photometric Stereo by Learning Jean-Denis Durou * , Yvain Queau * , Vincent Charvillat * * IRIT-VORTEX, ENSEEIHT, Toulouse, France Abstract— In this work, we solve photometric stereo by learning. The basic idea consists in inserting a sphere in the scene to be reconstructed, and in covering both the sphere and the scene with the same painting. The images of the sphere being considered as learning data, the knowledge of the scene reflectance is not required any more to implement photometric stereo. In addition, the self-shadows become meaningful. We show how a Principal Components Analysis (PCA) allows us to reach the same results as Hertzmann et al. [1] but faster. On the other hand, we show how to detect the cast-shadows of the scene in the case where no such shadow occurs on the sphere. We also show how to extend our approach to non-painted scenes. I. I NTRODUCTION Amongst the different 3D-reconstruction techniques, shape- from-shading is often discarded, according to its limited per- formances. An important improvement is reached using several images of the scene taken from the same viewpoint, but under different illuminations. This technique, known as photometric stereo, was proposed first by Woodham [1]. In the last years, it has become rather popular, due to very accurate results obtained at small scales [2]. II. ACCELERATION OF HERTZMANN’ S METHOD Our starting point is a recent paper by Hertzmann et al. [3], in which photometric stereo is solved by learning. More precisely, a sphere is inserted in the scene to be reconstructed (cf. Fig. 1). If n illuminations are used, each pixel P of the scene is given the same normal as the point on the sphere which is the most similar to P , according to their n greylevels read in the n images. Our first contribution is to make a PCA, which allows us to reduce the problem dimension from n to p<n, thus accelerating Hertzmann’s method with comparable accuracy (cf. Fig. 2). Fig. 1. Real images of a bottle (1176×398 pixels) and of a sphere (332×328 pixels) covered with the same painting, seen under n =8 different lights [3]. Fig. 2. 3D-reconstructions of the bottle using photometric stereo on the images of Fig. 1: on the left, Hertzmann’s method (CPU = 608 s); on the right, our method which resorts to the 3 first principal components (CPU = 238 s). III. I MPROVEMENTS OF HERTZMANN’ S METHOD We also show how to generalize this method to the cast- shadowed pixels, which are usually considered as outliers. Finally, we show how to avoid the need to cover both the scene and the sphere with the same painting (see Figs. 3 and 4). Fig. 3. Synthetic images of a teapot and of a sphere seen under n =5 different lights. The sphere has a uniform albedo, while the teapot is textured. Fig. 4. Results obtained applying our method to the images of Fig. 3: on the left, estimated albedo; on the right, reconstructed surface. REFERENCES [1] R. J. Woodham, “Photometric Method for Determining Surface Orienta- tion from Multiple Images,” Opt. Engin., 19(1):139–144, 1980. [2] C. Hern´ andez, G. Vogiatzis, and R. Cipolla, “Overcoming shadows in 3-source photometric stereo,” IEEE Trans. Patt. Anal. Mach. Intell., 33(2):419–426, February 2011. [3] A. Hertzmann and S. M. Seitz, “Example-Based Photometric Stereo: Shape Reconstruction with General, Varying BRDFs,” IEEE Trans. Patt. Anal. Mach. Intell., 27(8):1254–1264, August 2005.
Transcript of Photometric Stereo by Learning -...

Photometric Stereo by LearningJean-Denis Durou∗, Yvain Queau∗, Vincent Charvillat∗
∗IRIT-VORTEX, ENSEEIHT, Toulouse, France
Abstract— In this work, we solve photometric stereo by learning.The basic idea consists in inserting a sphere in the scene to bereconstructed, and in covering both the sphere and the scene withthe same painting. The images of the sphere being consideredas learning data, the knowledge of the scene reflectance is notrequired any more to implement photometric stereo. In addition,the self-shadows become meaningful. We show how a PrincipalComponents Analysis (PCA) allows us to reach the same resultsas Hertzmann et al. [1] but faster. On the other hand, we showhow to detect the cast-shadows of the scene in the case where nosuch shadow occurs on the sphere. We also show how to extendour approach to non-painted scenes.
I. INTRODUCTION
Amongst the different 3D-reconstruction techniques, shape-from-shading is often discarded, according to its limited per-formances. An important improvement is reached using severalimages of the scene taken from the same viewpoint, but underdifferent illuminations. This technique, known as photometricstereo, was proposed first by Woodham [1]. In the last years, ithas become rather popular, due to very accurate results obtainedat small scales [2].
II. ACCELERATION OF HERTZMANN’S METHOD
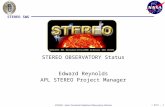
Our starting point is a recent paper by Hertzmann et al.[3], in which photometric stereo is solved by learning. Moreprecisely, a sphere is inserted in the scene to be reconstructed(cf. Fig. 1). If n illuminations are used, each pixel P of thescene is given the same normal as the point on the spherewhich is the most similar to P , according to their n greylevelsread in the n images. Our first contribution is to make a PCA,which allows us to reduce the problem dimension from n top < n, thus accelerating Hertzmann’s method with comparableaccuracy (cf. Fig. 2).
Fig. 1. Real images of a bottle (1176×398 pixels) and of a sphere (332×328pixels) covered with the same painting, seen under n = 8 different lights [3].
Fig. 2. 3D-reconstructions of the bottle using photometric stereo on the imagesof Fig. 1: on the left, Hertzmann’s method (CPU = 608 s); on the right, ourmethod which resorts to the 3 first principal components (CPU = 238 s).
III. IMPROVEMENTS OF HERTZMANN’S METHOD
We also show how to generalize this method to the cast-shadowed pixels, which are usually considered as outliers.Finally, we show how to avoid the need to cover both the sceneand the sphere with the same painting (see Figs. 3 and 4).
Fig. 3. Synthetic images of a teapot and of a sphere seen under n = 5different lights. The sphere has a uniform albedo, while the teapot is textured.
Fig. 4. Results obtained applying our method to the images of Fig. 3: on theleft, estimated albedo; on the right, reconstructed surface.
REFERENCES
[1] R. J. Woodham, “Photometric Method for Determining Surface Orienta-tion from Multiple Images,” Opt. Engin., 19(1):139–144, 1980.
[2] C. Hernandez, G. Vogiatzis, and R. Cipolla, “Overcoming shadows in3-source photometric stereo,” IEEE Trans. Patt. Anal. Mach. Intell.,33(2):419–426, February 2011.
[3] A. Hertzmann and S. M. Seitz, “Example-Based Photometric Stereo:Shape Reconstruction with General, Varying BRDFs,” IEEE Trans. Patt.Anal. Mach. Intell., 27(8):1254–1264, August 2005.













![Lecture 8 Active stereo& - Stanford UniversitySilvio Savarese Lecture 7 - 12-Feb-18 Lecture 8 Active stereo& Volumetric stereo Reading: [Szelisky] Chapter 11 “Multi-view stereo”](https://static.fdocuments.net/doc/165x107/5f0f7f2f7e708231d444745e/lecture-8-active-stereo-stanford-university-silvio-savarese-lecture-7-12-feb-18.jpg)