
Performance Parameters Of Speed Control Potential Of ... · Performance Parameters Of Speed Control...
41
1 4th EUROCONTROL Innovative Research workshop Day II – December 2005, the 7th Performance Parameters Of Speed Control & Potential Of Lateral Offset Rüdiger Ehrmanntraut EUROCONTROL Experimental Centre (EEC) Brétigny sur Orge, France
Transcript of Performance Parameters Of Speed Control Potential Of ... · Performance Parameters Of Speed Control...

1
4th EUROCONTROL Innovative Research workshopDay II – December 2005, the 7th
Performance Parameters Of Speed Control
&Potential Of Lateral Offset
Rüdiger EhrmanntrautEUROCONTROL Experimental Centre (EEC)
Brétigny sur Orge, France

2
Strategic Traffic Organisation– Concept Elements
Strategic Traffic Organisation
CE1Complexity Prediction
CE2Multi Sector
Traffic Organisation
CE3Functional Airspace
Segregation
CE4Synchronous
Planning
Lateral Offset
Vertical Offset
Speed Control
Contracts
System WideInformation
Management
ConflictGeometries
ConflictDensity
Highways
4D / 3D Tubes
Dynamic Sectors
3DAirways
ClusterOrganisation
Flow and Sequences
Strategic Traffic Organisation
CE1Complexity Prediction
CE2Multi Sector
Traffic Organisation
CE3Functional Airspace
Segregation
CE4Synchronous
Planning
Lateral Offset
Vertical Offset
Speed Control
Contracts
System WideInformation
Management
ConflictGeometries
ConflictDensity
Highways
4D / 3D Tubes
Dynamic Sectors
3DAirways
ClusterOrganisation
Flow and Sequences

3
Validation process
Concept definitionConcept element 1: ComplexityConcept element 2: MSPConcept element 3: 3D routes
Fundamental ATM researchWhy this approach?What is it?What benefit?
Capacity, safety, environmentFast time simulation
System DesignHow?
AutomationInformation systemTechnologies

4
Simulation Airspace and Traffic Model
RAMS 5.04 Plus5 States scenario (Dowdall 2001)
12 Sep. 1997 =100%150% (~2005)200% (~2010) 300% (?)140 sectors from 24 ATC Karlsruhe, Maastricht and Reims
36 en-route sectors above flight level 245
9. R. Dowdall, 2001, 5 States Fast-Time Simulation, EUROCONTROL Experimental Centre, EEC Report No.361, www.eurocontrol.int/eec/publications.html

5
Number of Aircraft per Hour for Three Measured Centres (150% Scenario)
0100200300400500600700800900
00:00
02:00
04:00
06:00
08:00
10:00
12:00
14:00
16:00
18:00
20:00
22:00
KARLSRUHE MAASTRICHT REIMS

6
Conflict-Attitudes Per Flightlevel Bands for the 3 Centres
0
50
100
150
200
250
300
190
210
230
250
270
290
310
330
350
370
390
410
Cruise-Cruise Cruise-Attitude Attitude-Attitude

7
Aircraft at flight level of entire 1997 scenario
0.0%
2.0%
4.0%
6.0%
8.0%
10.0%
12.0%
10-19
40-49
70-79
100-1
0913
0-139
160-1
6919
0-199
220-2
2925
0-259
280-2
8931
0-319
340-3
4937
0-379
400-4
09

8
Rüdiger EhrmanntrautFrank Jelinek
EUROCONTROL Experimental Centre (EEC)Brétigny sur Orge, France
Performance Parameters Of Speed Control
9
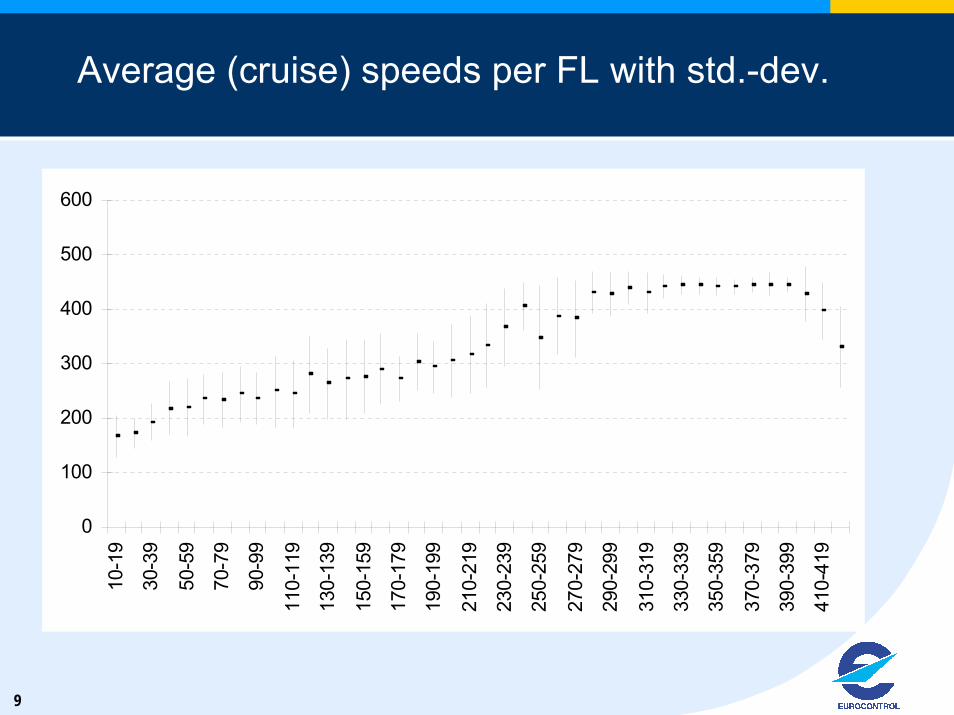
Average (cruise) speeds per FL with std.-dev.
0
100
200
300
400
500
600
10-1
9
30-3
9
50-5
9
70-7
9
90-9
9
110-
119
130-
139
150-
159
170-
179
190-
199
210-
219
230-
239
250-
259
270-
279
290-
299
310-
319
330-
339
350-
359
370-
379
390-
399
410-
419

10
Aircraft Performance Envelopes
Update with BADA 3.5 (Nuic 2004)More than 100 performance modelsPrecise speed models for 20 aircraft typesOther speed profiles by ICAO class: Heavy, Medium, Light
Limited to 15% from nominal behaviour
A30B Cruise Speed Variance in %
0%
5%
10%
15%
20%
25%
30%
0
200
220
240
260
280
300
320
340
360
380
400
999
Flight Level
3. [12] A. Nuic, 2004, BADA Version 3.5, EUROCONTROL Experimental Centre, www.eurocontrol.fr/projects/bada/

11
Conflict and Controller Model
Tactical (TC) ∆LTC = 0 min∆STC = 5NM
Look-ahead parameter ∆L
Maximal Implementation interval ∆R
ac1
ac2
e1 e3
e2
e4
S1
Planner (PC)∆LPC = 15 min∆SPC = 7NM
S2
Separation Buffer ∆S

12
Rulebase Logic
Conflict Geometry Analysis
Which a/c to penalise?
Speed Reduction?Speed Increase?
Set Resolution ConstraintsNew speed, times
Reduce penalisedIncrease penalisedReduce favouriteIncrease favourite
Penalise:1. requesting occupied stable FL2. nearer to airport3. inbound and second4. inbound vs outbound5. evolution vs stable6. behind7. below8. in descent9. significantly faster10. about to leave cruise11. still on ground
Set resolution start timeSet resolution stop timeIterate speed

13
Uncertainty Model
Uncertainty modeled by higher lateral separationsPlanner separated on 7NM horizontal buffer, 1000 feet verticalPlanner 6% uncertainty per hour = 1.5% in the look-ahead horizon.Radar 0% uncertainty
7 NM5 NM

14
Simulation Scenarios
A Conflict Detection only, no resolutions
B Planner resolves speed-onlyRadar is disabled
C Planner resolves vertical-only (+/- 2 RVSM flight levels)Radar is disabled
D Planner resolves speed-onlyRadar resolves speed-only
E Planner resolves speed-onlyRadar resolves horizontal-vectors-only

15
Results-Overview
0
2000
4000
6000
8000
10000
12000
14000
16000
A B C D E A B C D E A B C D E A B C D E
100 150 200 300
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
100%
Conflicts Unresolved % Resolved Unresolved / Flights
16
0
200
400
600
800
1000
1200
-18
-17
-16
-15
-14
-13
-12
-11
-10
- 9 - 8 - 7 - 6 - 5 - 4 - 3 - 2 - 1 + 1 + 2 + 3 + 4 + 5 + 6 + 7 + 8 + 9 +10
+11
+12
+13
+14
+15
+16
+17
100 - B 100 - D 100 - E 150 - B 150 - D 150 - E200 - B 200 - D 200 - E 300 - B 300 - D 300 - E
Speed Adjustment %
# resolved
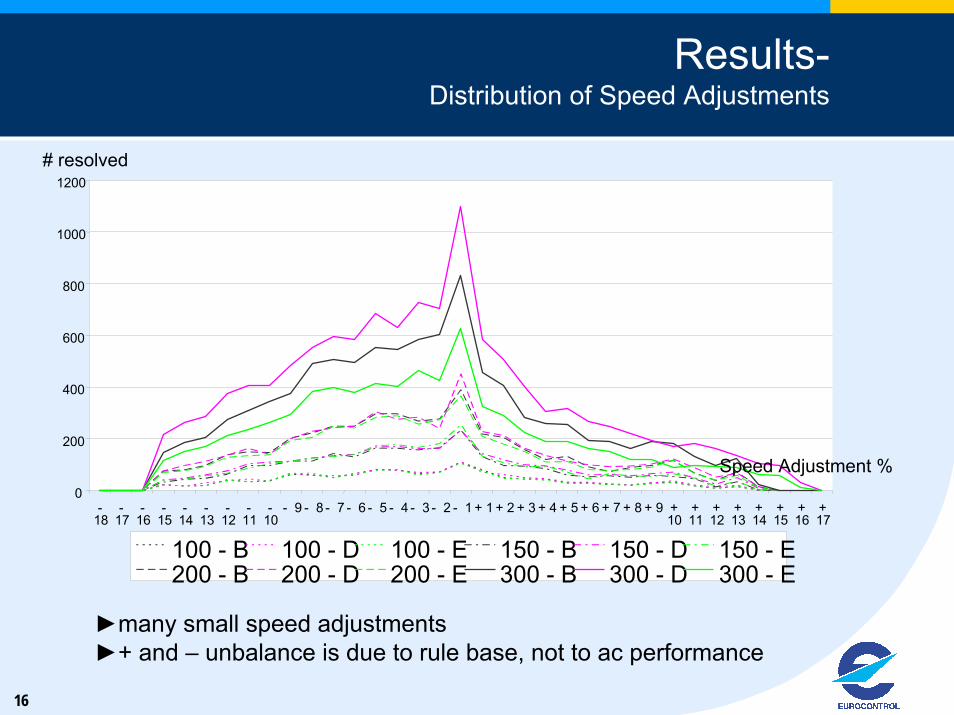
Results-Distribution of Speed Adjustments
►many small speed adjustments►+ and – unbalance is due to rule base, not to ac performance

17
-
1 000
2 000
3 000
4 000
5 000
6 000
7 000
8 000
100 150 200 300 100 150 200 300 100 150 200 300 100 150 200 300B C D E
0%
20%
40%
60%
80%
100%
0 - 10 10 - 30 30 - 90 % resolved 0 - 10 % resolved 10 - 30 % resolved 30 - 90
Results-Encounter Angles and their Resolution Rates
• Other study shows that conflicts almost equally distributed over angle 1°-179°
►More speed resolutions for wide angles• Small angel = 0° and 180°►Climbs and descents can still be
resolved with speed
0 90 180

18
Results-Minimal Displacement Distance and their Resolution Rates
40%
50%
60%
70%
80%
90%
1NM 2NM 3NM 4NM 5NM 6NM 7NM
B C D E
►critical conflicts more difficult►safets? The PC-speed-only and the PC-speed-TC-vectors
CPA Distance
Resolution rates

19
Results-Conflict Clusters
Cluster: transitive closure of conflicting aircraft in time (anddistance).
Cluster A-B-CIf D in conflict with A, or B, or C, then cluster A-B-C-D
B
C
A
D

20
1
10
100
1000
10000
100
150
200
300
100
150
200
300
100
150
200
300
100
150
200
300
100
150
200
300
100
150
200
300
100
150
200
300
100
150
200
300
100
150
200
300
100
150
200
300
CL_1 CL_2 CL_3 CL_4 CL_5 CL_6 CL_7 CL_8 CL_9 CL_10
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
Results-Conflict Clusters Average Sizes
Normal conflict
Cluster size
Resolution ratesLog count
Senario D = planner and radar use speed-onlyCluster = +/- 5 FL and 8 minutes, no distance limitation►Exponential decrease of cluster sizes► Graceful degrading for big clusters

21
0%
100%
300%
500%
700%
900%
1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8 9 10 1 2 3 4 5 6 7 8 9 10100 200 300
PC vertical – TC nil
PC speed – TC nil
Results-Number Constraining Aircraft (1)
# constrainingTraffic growth
►vertical and speed resolution differ

22
Results-Constraining Aircraft Average Resolution Rates
0%
20%
40%
60%
80%
100%
r 0 r 1 r 2 r 3 r 4 r 5 r 6 r 7 r 8 r 9300
TC speed – PC nil
TC vertical – PC nil
TC speed – PC vector
TC speed – PC speed
• Read: xx % of conflicts with n constraining aircraft could be resolved by TC-PC

23
Results-Environmental Parameters for TC speed – PC speed
94%95%96%97%98%99%
100%101%
D D D100 150 200
Fuel CO HC NOx H2O CO2 SO2
► small effect or even positive effect of speed control

24
Discussion + Conlcusions
Capacity:►Speed control very high performance►Graceful behaviour for conflict clusters►Graceful behaviour for conflict with many constraining aircraft
Automation with MSP►If MSP function is automated and uses speed control only, then the radar controller is left with
much less conflicts, but with complicated clusters.►Automation: The capacity barrier is the limited airspace - efficient packing and traffic
organisation are requiredSafety►Speed resolutions have good behaviour for critical conflicts►Safety best when planner and radar controller apply different resolutions (orthogonal solutions)►Radar control did not impact the ability of a long-term planner (15 minutes = MSP) to resolved
with speed controlEnvironment►Small speed adaptation often sufficient►No or very little positive impact when applying speed control

25
What is Lateral Offset?

26
Lateral Offset - Literature
Herndon, A. A., et al., 2003Utilizing RNAV Avionics: Testing Lateral Offset Procedures, MP03W160, The MITRE Corporation, McLean, VA., in proceedings of the 22nd DASC, Indianapolis, Indiana, USA
field trials in Albuquerque and Houston, single centre: 32 aircraftControllers and pilots seem to accept procedure
Herndon, A. A., J. S. DeArmon, J. Spelman, 2004Use Of Lateral/Parallel FMS Procedures And Implementation Issues, MITRE CAASD, in proceedings of the 23rd DASC, Salt Lake City, USA
Minneapolis ARTCC: 15 flightsQuantification of benefits difficult due to small traffic setReconfirms acceptance
Related literature: RNP-RNAV, ICAO SASP

27
RAMS Simulation Model
AT (time) TURN RIGHT/LEFT (heading or number of degrees) OFFSET (distance) REJOIN ROUTE ABEAM (location)Start time, time increment, search directionOffset direction: left, rightOffset angelOffset distanceRejoin location: end of sector, end of centre, end of route, top of descent
CDt CSt
aheadlookT −
ttionimplementaLOt −
T∂
→∆T

28
Lateral Offset Resolution Model
12
3 4
→∆T
FOR EACH rejoin-location (rule-base driven)FOR flight1 AND flight2 (rule-base driven)
FOR forward-search OR backward-searchFOR EACH offset-distance
FOR EACH offset-directionFOR EACH offset-angle
TRY new trajectory

29
Results (1) –Rejoin Rules
Setup 1: offset-distance 5 + n*2 <15 NM, offset angle 30 deg +/- 15Resolution trigger time -15 minutes
0
1000
2000
3000
4000
5000
6000
Y-combi Y-EoC Y-EoR Y-EoS Y-TOD
200
0%
10%
20%
30%
40%
50%
60%
70%
80%
Conflicts Unresolved % Resolved Unresolved / Flights
Year 2010
30
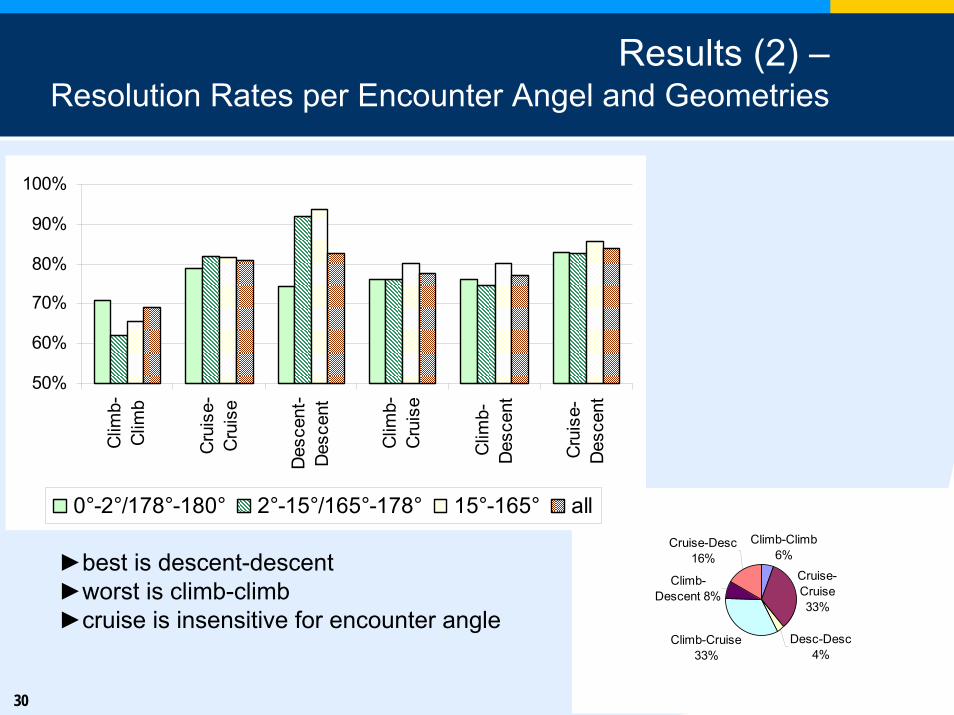
Results (2) –Resolution Rates per Encounter Angel and Geometries
Climb-Descent 8%
Climb-Cruise 33%
Desc-Desc 4%
Cruise-Cruise33%
Climb-Climb 6%
Cruise-Desc16%
50%
60%
70%
80%
90%
100%
Clim
b-C
limb
Cru
ise-
Cru
ise
Des
cent
-D
esce
nt
Clim
b-C
ruis
e
Clim
b-D
esce
nt
Cru
ise-
Des
cent
0°-2°/178°-180° 2°-15°/165°-178° 15°-165° all
►best is descent-descent►worst is climb-climb►cruise is insensitive for encounter angle

31
Results (3) –Different Offset Anges
56.0%
58.0%
60.0%
62.0%
64.0%
66.0%
68.0%
10 15 20 25 30 35 40 45
Scenrios run each with different offset angleOffset angle = rejoin angle
►Observed optimum at 35 degrees

32
Results (4) –Discrete Offset Distance
0
1000
2000
3000
4000
5000
6000
1 x 7NM 2 x 7NM 3 x 7NM 5+n*2<15
200
0%
10%
20%
30%
40%
50%
60%
70%
80%
Conflicts Unresolved Resolutions % Unresolved/Flights %
Resolution with 1, 2, or 3 offset distances in 7 NM intervals►2*7 and 3*7 equal►1*7 worst, but still very high resolution

33
Results (5) –Discrete Offset Distance Distribution
1
10
100
1000
10000
-21 -14 -7 0 7 14 21
0 deviation 1 deviation 2 deviations3 deviations 4 deviations
log scale
Resolution with 1offset distances in 7 NM►distributes until +/- 21NM►No aircraft encountered >4 deviations►A 10% rule?►Resolution space still drastically under-utilised

34
Results (6) –Uncertainties
40%50%60%70%80%
PC4%
PC6%
PC12%
PC18%
TC4%
TC12%
TC18%
% Resolutions
Conflict detection with 4, 6, 12, or 18% uncertainty►Lateral Offset requires long look-ahead times►Planning Controller PC degrades►Radar Controller TC degrades faster

35
Results (7) –Picture Simulation Output

36
Found Issues
Syntax needs improvement – proposed clearance can lead to error►Corrected in this study
Syntax needs improvement - clarity on offset distanceWhen aircraft already flying LO get another additional LO clearance
►We propose always absolute distance from initial flight plan
LO direction should be optimised for trajectory

37
Discussion (1)
Multi Sector Planner as Conflict Solver:►LO very high performance►LO insensitive for uncertainties►LO low impact on flight efficiency
Complexity Reduction►LO has very high degree-of-order (metric proposed by Ehrmanntraut)
Flow Safety Maximisation►LO safer because conflict
densities reduced►LO safer because of planning
horizon, time to chaos is bigger
ABCABC
DEF
OPR
LMNLMN
RSTRST
GHI
AFR8910 LL290 330 BAW4561
330 AZA1234 335 370
BAW414290
SAB910 ST289 260
AFR745310
DHL1234335 370
LTU114 NE335 370
AF747 330
BAW5944330
UVWUVW
XYZXYZ
S
BS
AS
cdacabC −−

38
Lateral Offset Conclusions
►LO very high resolution rates►optimum offset angle 35 degrees►best for cruising en-route traffic►operates well with reduced number of offset distances►operates well under high uncertainties►there are open issues►very useful for a tactical Multi Sector Planner►should improve safety
►is easy and cheap to implement

39
Lateral Offset or Speed?
0
2000
4000
6000
8000
10000
12000
14000
16000
LO Speed LO Speed
Traffic 200 = 2010 Traffic 300 = 2025
0%
10%
20%
30%
40%
50%
60%
70%
80%
90%
Conflicts Unresolved Resolutions % Unresolved/Flights %
Attention: two models are compared≠►Both perform very well►LO ‘better’ than speed control?

40
Summed Up
Both measures very promisingSector capacity booster
To discussQuantify workload and capacity?Operational feasibility to let MSP operate with speed and offset?Uncertainties due to look ahead horizon?

41


















