
Perancangansistemkontroldengan root locus (lanjutan) · Contoh(lanjutan) Kompensasi sistem Settling...
27
Perancangan sistem kontrol dengan root locus (lanjutan) Dasar Sistem Kontrol, Kuliah 12
Transcript of Perancangansistemkontroldengan root locus (lanjutan) · Contoh(lanjutan) Kompensasi sistem Settling...
Perancangan sistem kontrol dengan
root locus (lanjutan)
Dasar Sistem Kontrol, Kuliah 12
Meningkatkan respons transien dengan
kompensasi bertingkat
Tujuan : merancang respons sistem kontrol dengan %OS yang diinginkanserta settling time (Ts) yang lebih pendek daripada sistem yg belumdikompensasi
-Kompensasi derivatif ideal-differensiator murni ditambahkan ke sistem kontrol umpan balik
Dasar Sistem Kontrol, Kuliah 12
-differensiator murni ditambahkan ke sistem kontrol umpan balik-menambah zero ke fungsi transfer-memerlukan komponen aktifdisebut juga kontroler Proporsional plus derivatif (PD controller)
-Kompensasi dengan diferensiator tidak murni-menambahkan zero -menambahkan pole yang lebih jauh ke fungsi transfer-menggunakan komponen pasifdisebut juga lead compensator
Kompensator PD
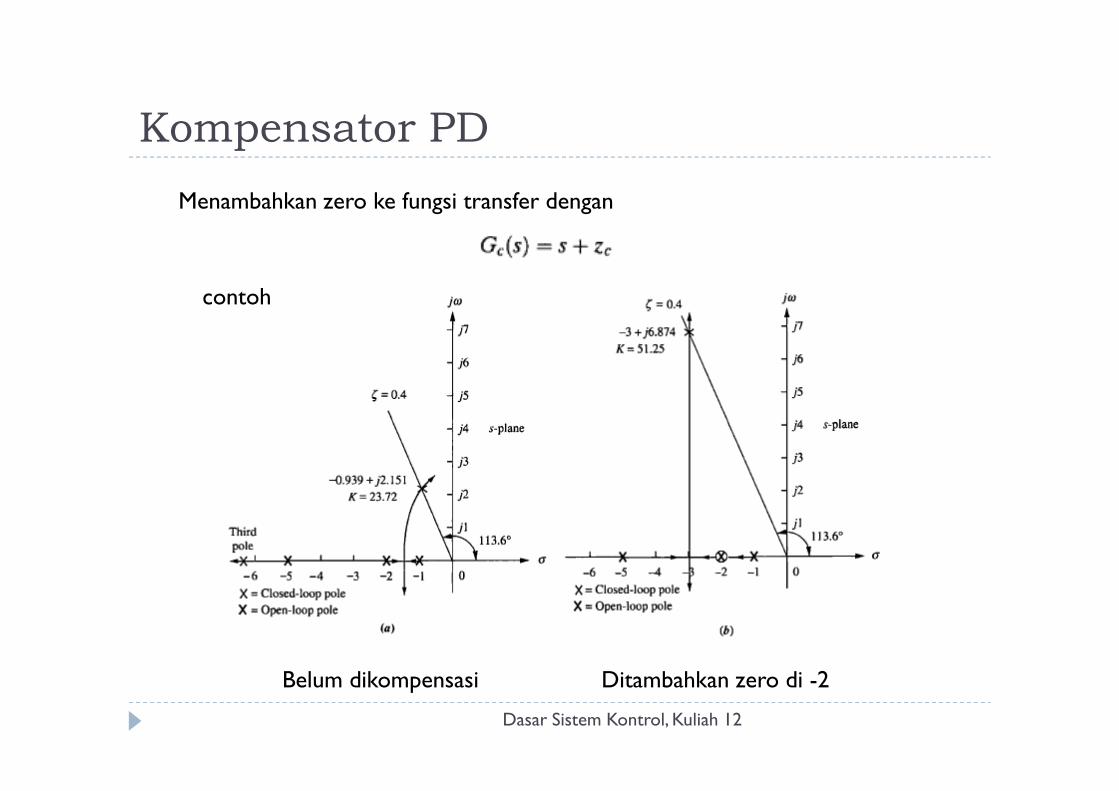
Menambahkan zero ke fungsi transfer dengan
contoh
Dasar Sistem Kontrol, Kuliah 12
Belum dikompensasi Ditambahkan zero di -2
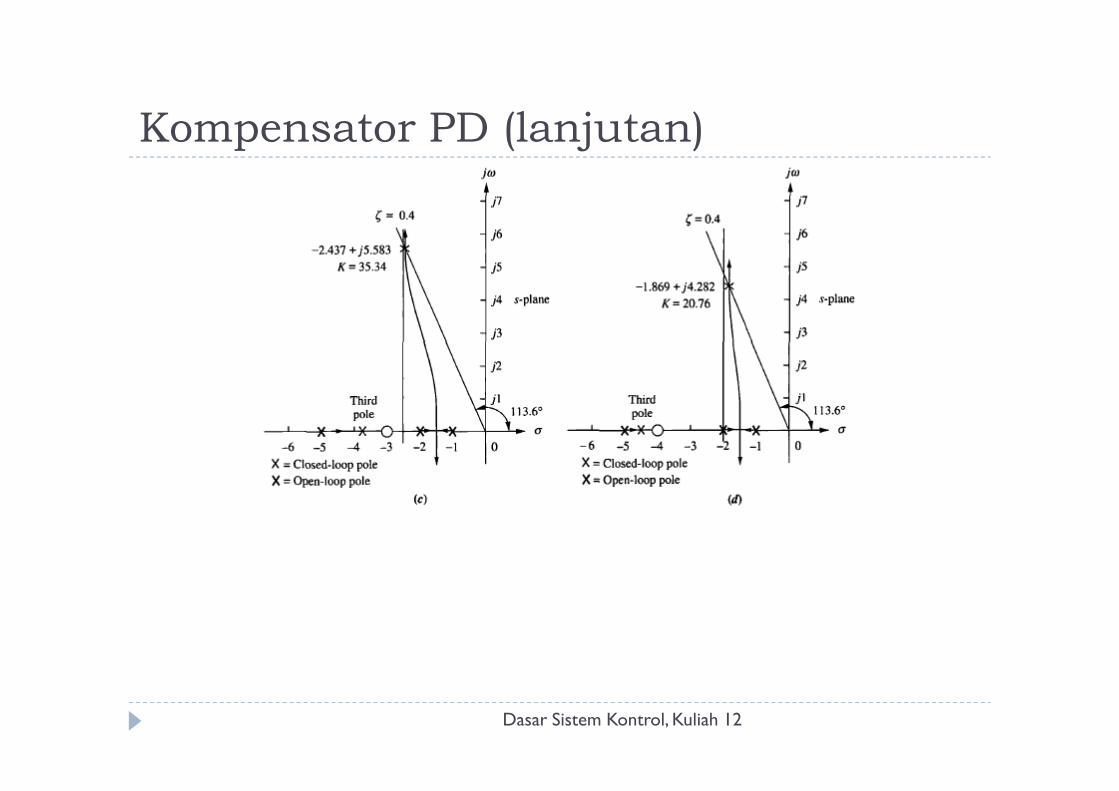
Kompensator PD (lanjutan)
Dasar Sistem Kontrol, Kuliah 12
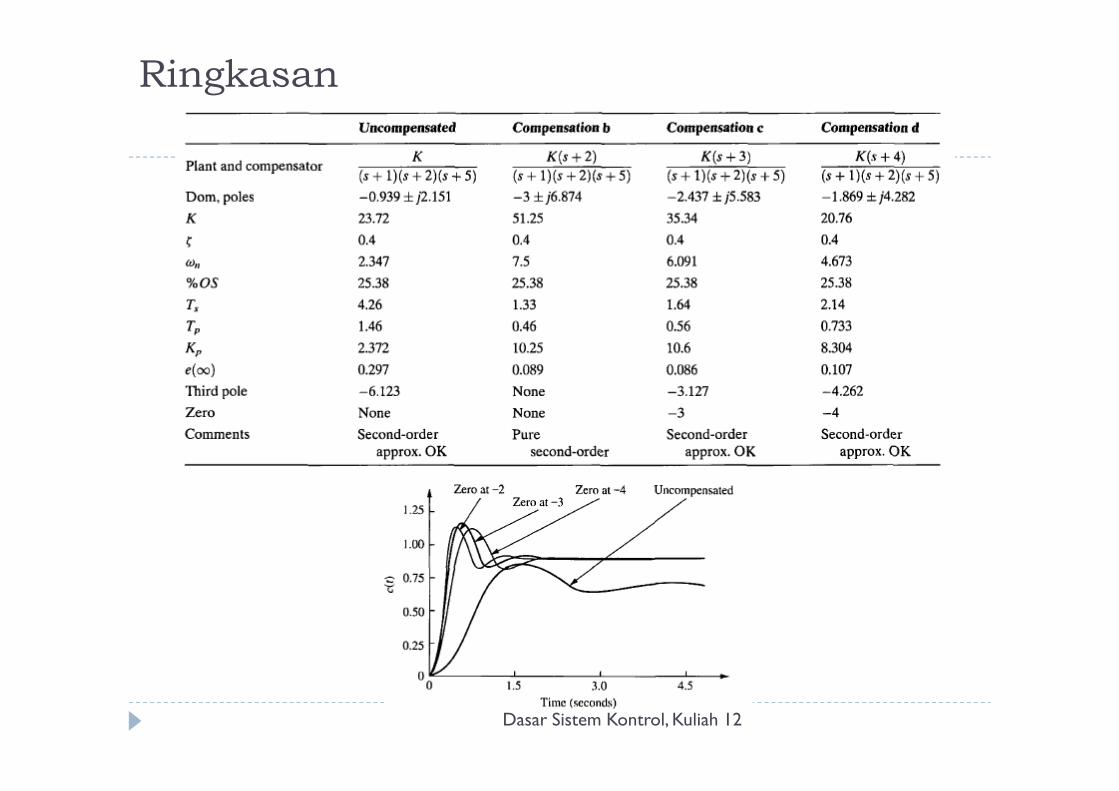
Ringkasan
Dasar Sistem Kontrol, Kuliah 12
Contoh
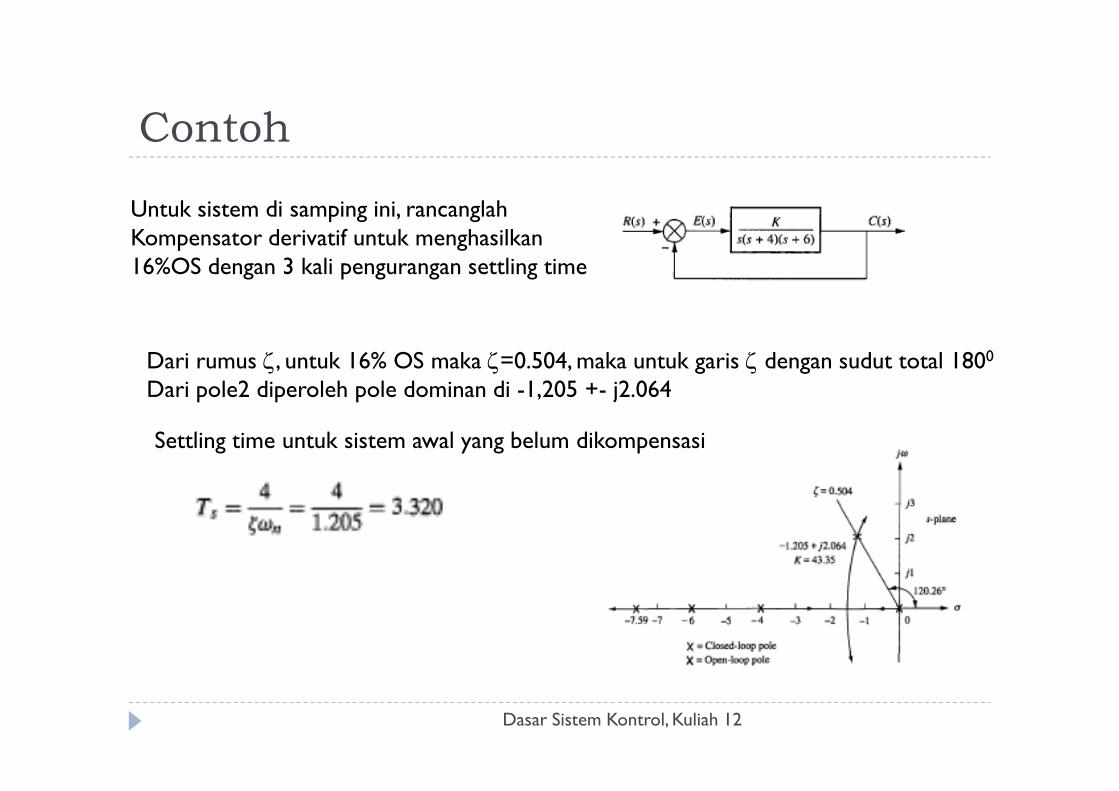
Untuk sistem di samping ini, rancanglahKompensator derivatif untuk menghasilkan16%OS dengan 3 kali pengurangan settling time
Dari rumus ζ, untuk 16% OS maka ζ=0.504, maka untuk garis ζ dengan sudut total 1800
Dari pole2 diperoleh pole dominan di -1,205 +- j2.064
Dasar Sistem Kontrol, Kuliah 12
Dari pole2 diperoleh pole dominan di -1,205 +- j2.064
Settling time untuk sistem awal yang belum dikompensasi
Contoh (lanjutan)Kompensasi sistem
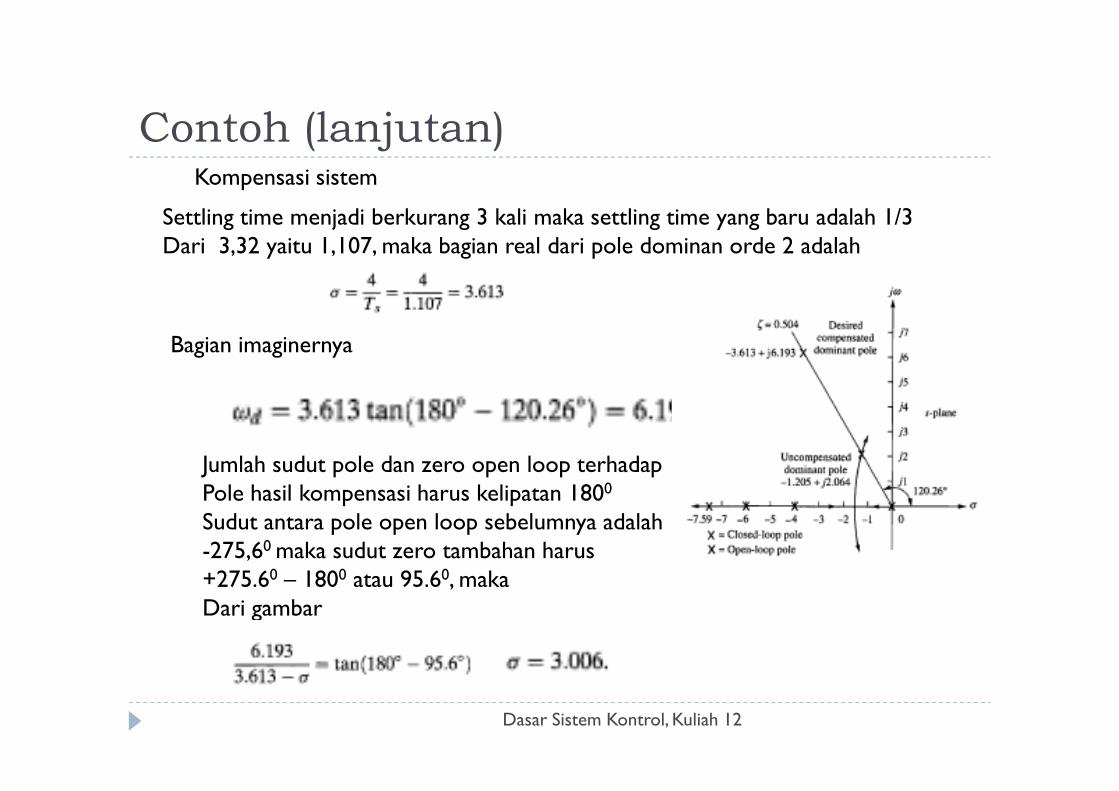
Settling time menjadi berkurang 3 kali maka settling time yang baru adalah 1/3 Dari 3,32 yaitu 1,107, maka bagian real dari pole dominan orde 2 adalah
Bagian imaginernya
Dasar Sistem Kontrol, Kuliah 12
Jumlah sudut pole dan zero open loop terhadapPole hasil kompensasi harus kelipatan 1800
Sudut antara pole open loop sebelumnya adalah-275,60 maka sudut zero tambahan harus+275.60 – 1800 atau 95.60, makaDari gambar
Contoh (lanjutan)
Dasar Sistem Kontrol, Kuliah 12
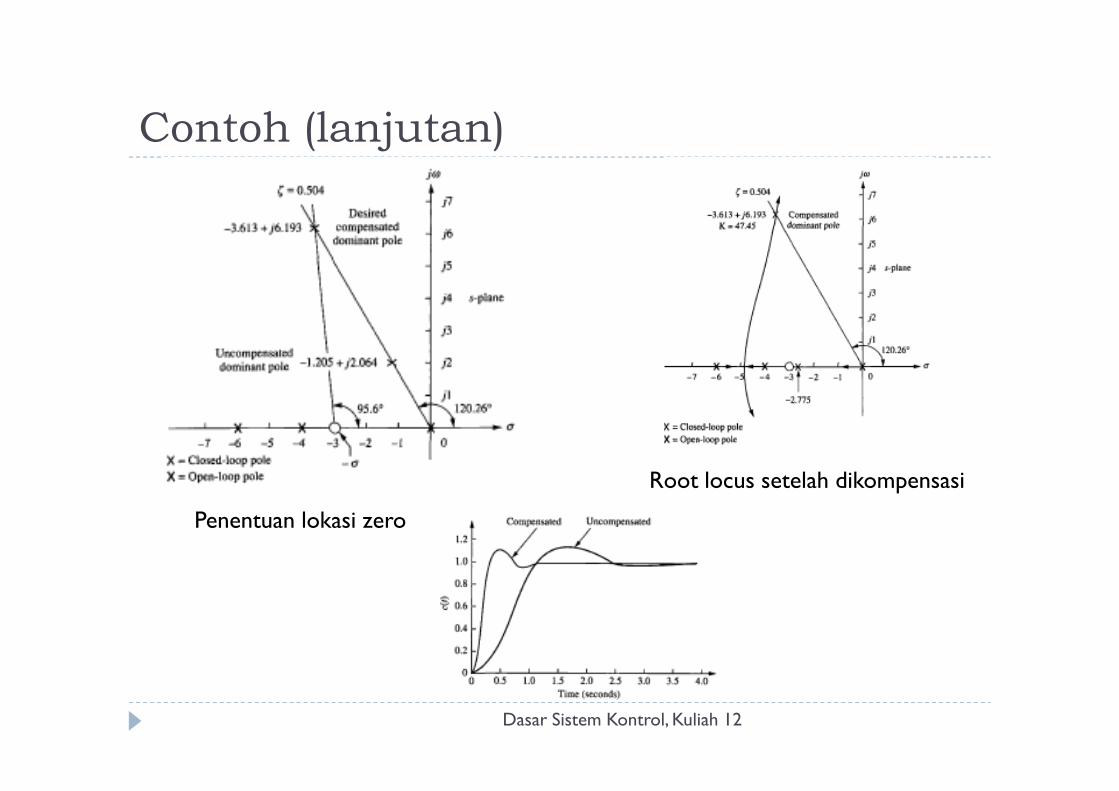
Penentuan lokasi zero
Root locus setelah dikompensasi
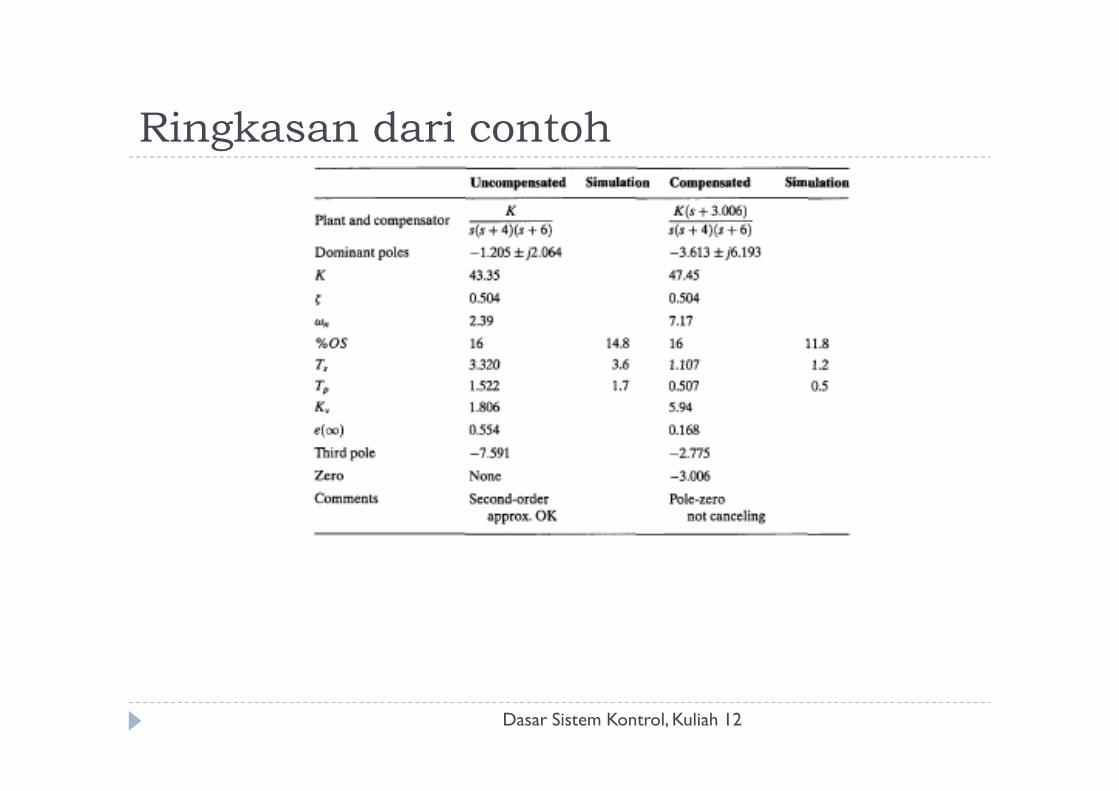
Ringkasan dari contoh
Dasar Sistem Kontrol, Kuliah 12
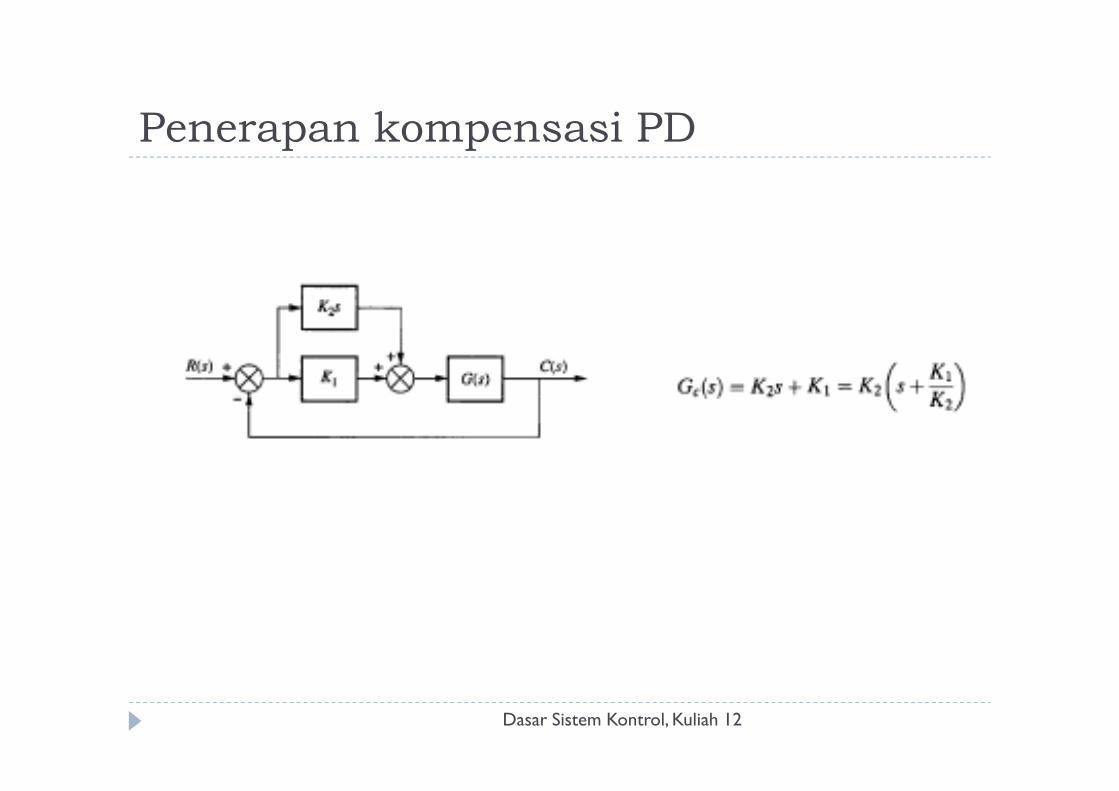
Penerapan kompensasi PD
Dasar Sistem Kontrol, Kuliah 12
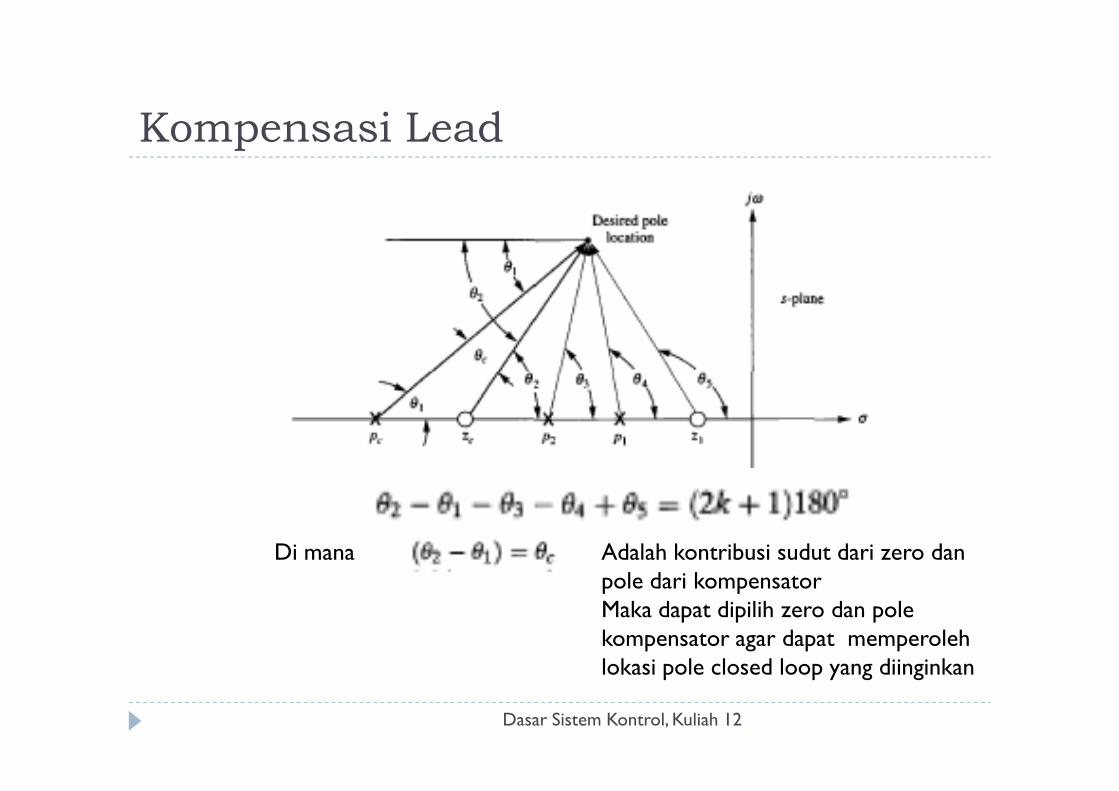
Kompensasi Lead
Dasar Sistem Kontrol, Kuliah 12
Di mana Adalah kontribusi sudut dari zero danpole dari kompensatorMaka dapat dipilih zero dan pole kompensator agar dapat memperolehlokasi pole closed loop yang diinginkan
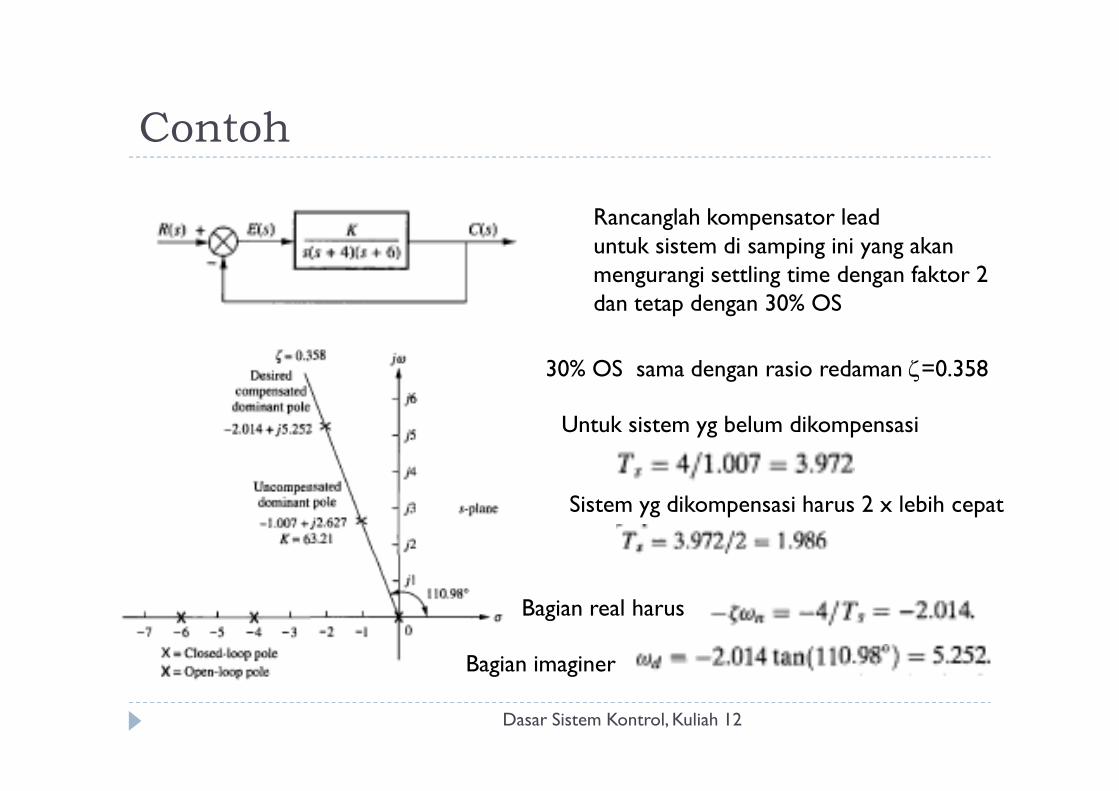
Contoh
Rancanglah kompensator lead untuk sistem di samping ini yang akanmengurangi settling time dengan faktor 2 dan tetap dengan 30% OS
30% OS sama dengan rasio redaman ζ=0.358
Dasar Sistem Kontrol, Kuliah 12
Untuk sistem yg belum dikompensasi
Sistem yg dikompensasi harus 2 x lebih cepat
Bagian real harus
Bagian imaginer
Contoh (lanjutan)
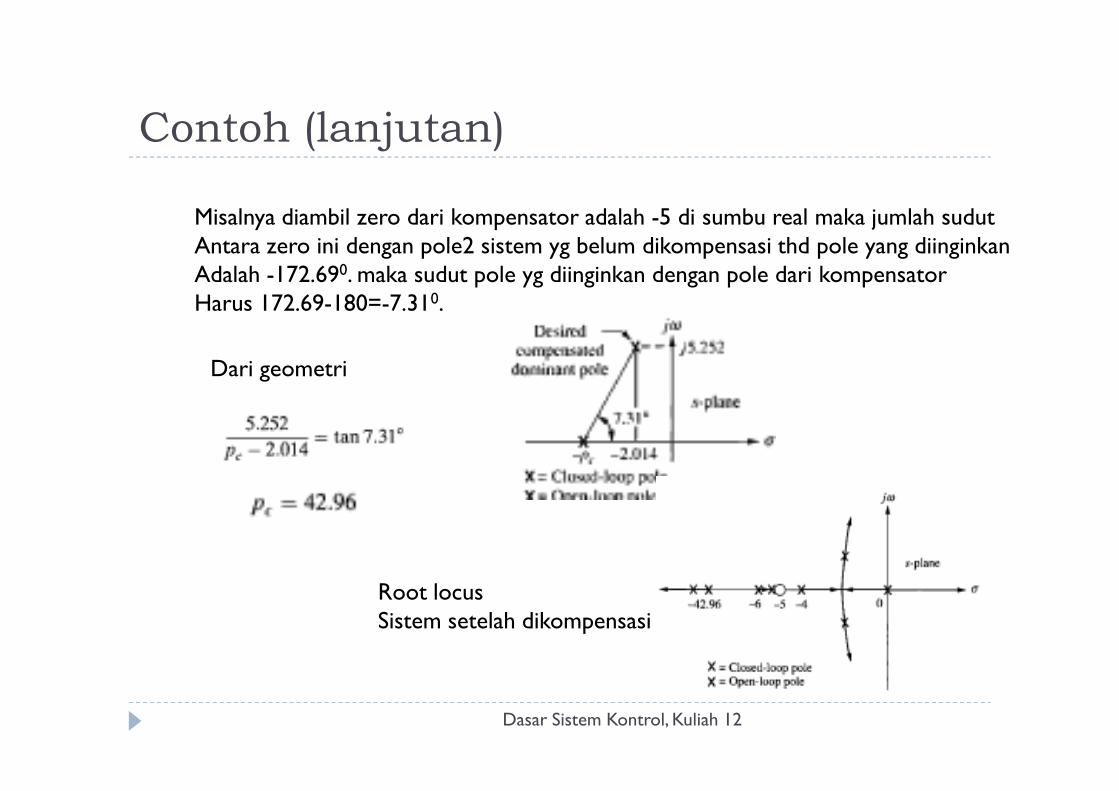
Misalnya diambil zero dari kompensator adalah -5 di sumbu real maka jumlah sudutAntara zero ini dengan pole2 sistem yg belum dikompensasi thd pole yang diinginkanAdalah -172.690. maka sudut pole yg diinginkan dengan pole dari kompensatorHarus 172.69-180=-7.310.
Dari geometri
Dasar Sistem Kontrol, Kuliah 12
Root locus Sistem setelah dikompensasi
Contoh (lanjutan)
Dasar Sistem Kontrol, Kuliah 12
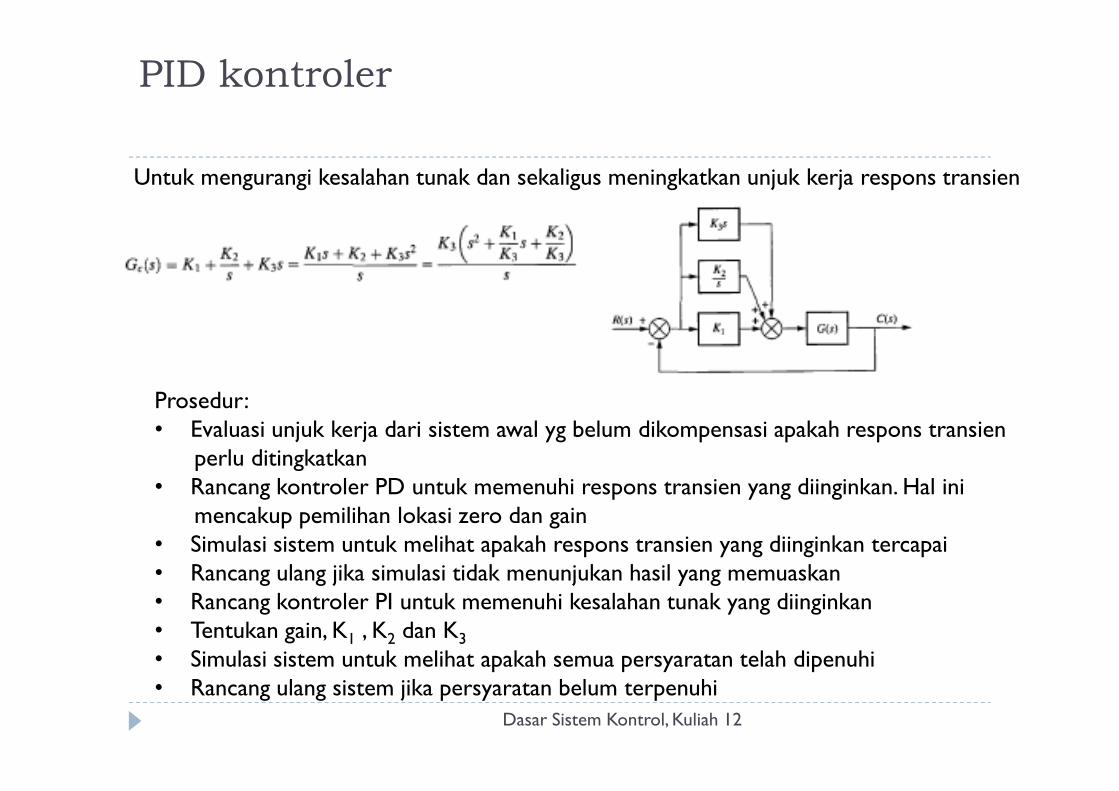
PID kontroler
Prosedur:
Untuk mengurangi kesalahan tunak dan sekaligus meningkatkan unjuk kerja respons transien
Dasar Sistem Kontrol, Kuliah 12
Prosedur:• Evaluasi unjuk kerja dari sistem awal yg belum dikompensasi apakah respons transien
perlu ditingkatkan• Rancang kontroler PD untuk memenuhi respons transien yang diinginkan. Hal ini
mencakup pemilihan lokasi zero dan gain • Simulasi sistem untuk melihat apakah respons transien yang diinginkan tercapai• Rancang ulang jika simulasi tidak menunjukan hasil yang memuaskan• Rancang kontroler PI untuk memenuhi kesalahan tunak yang diinginkan• Tentukan gain, K1 , K2 dan K3
• Simulasi sistem untuk melihat apakah semua persyaratan telah dipenuhi• Rancang ulang sistem jika persyaratan belum terpenuhi
Ilustrasi
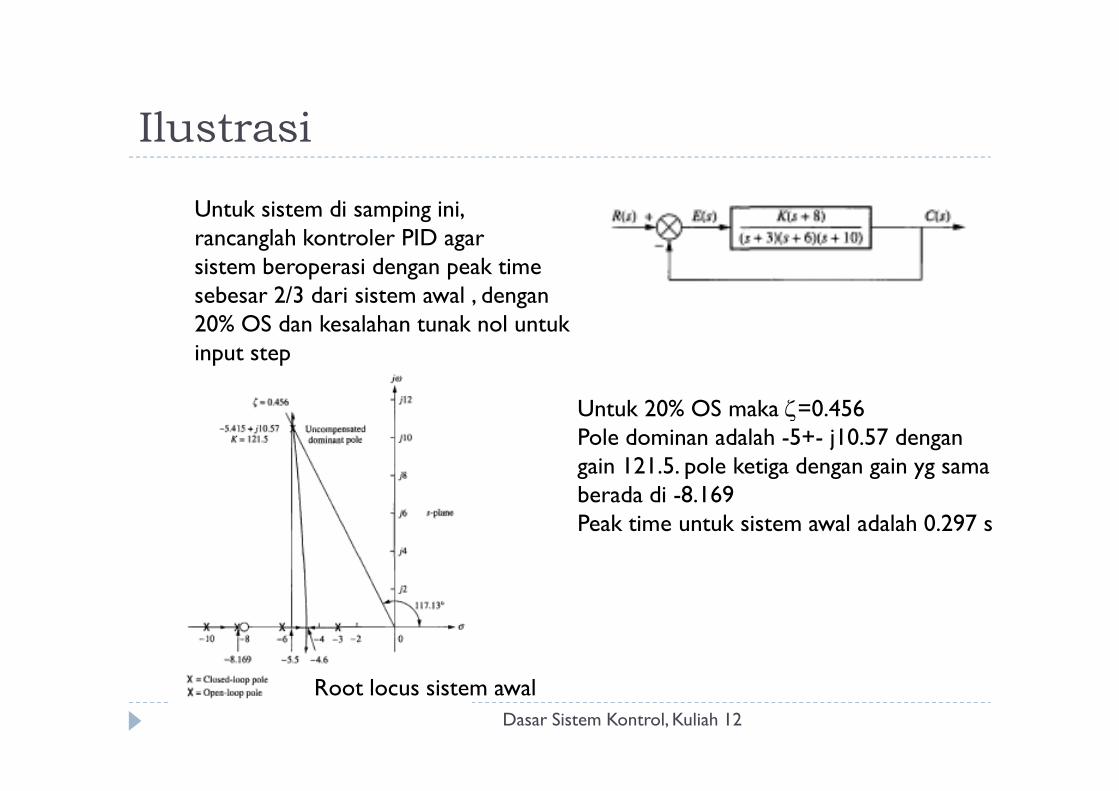
Untuk sistem di samping ini,rancanglah kontroler PID agar sistem beroperasi dengan peak timesebesar 2/3 dari sistem awal , dengan20% OS dan kesalahan tunak nol untukinput step
Untuk 20% OS maka ζ=0.456
Dasar Sistem Kontrol, Kuliah 12
Root locus sistem awal
Untuk 20% OS maka ζ=0.456Pole dominan adalah -5+- j10.57 dengangain 121.5. pole ketiga dengan gain yg samaberada di -8.169Peak time untuk sistem awal adalah 0.297 s
Ilustrasi (lanjutan)
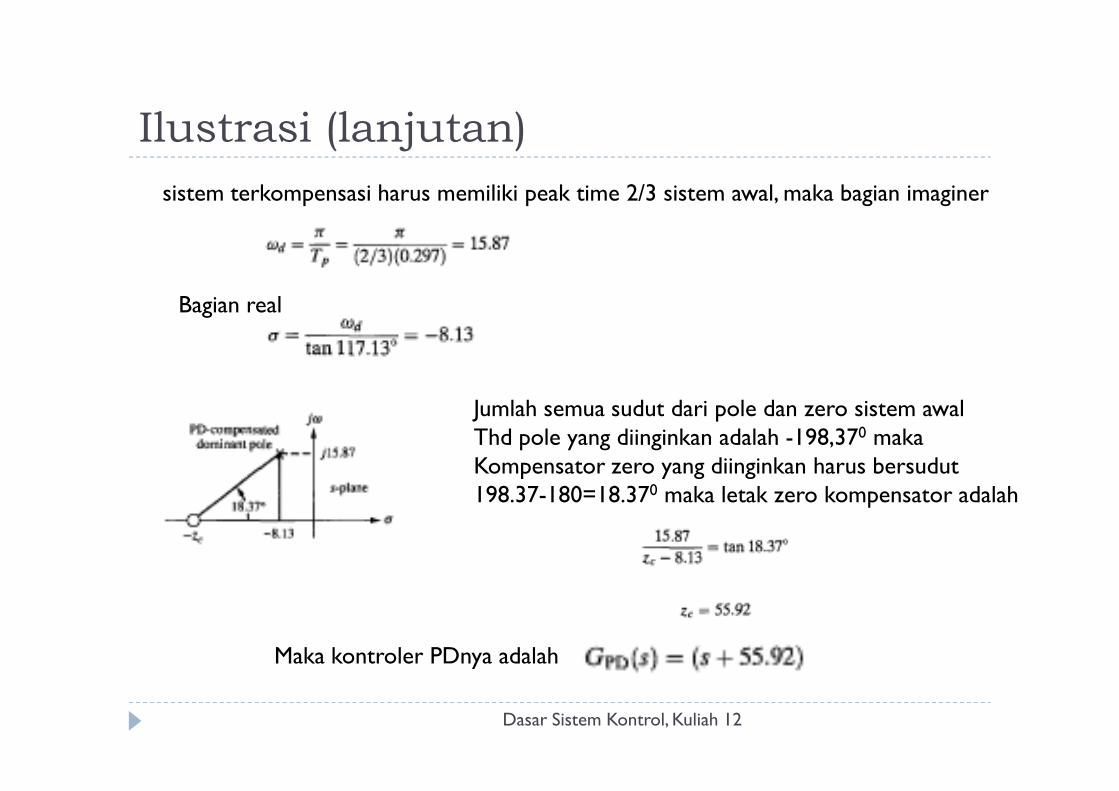
sistem terkompensasi harus memiliki peak time 2/3 sistem awal, maka bagian imaginer
Bagian real
Jumlah semua sudut dari pole dan zero sistem awal
Dasar Sistem Kontrol, Kuliah 12
Jumlah semua sudut dari pole dan zero sistem awalThd pole yang diinginkan adalah -198,370 makaKompensator zero yang diinginkan harus bersudut198.37-180=18.370 maka letak zero kompensator adalah
Maka kontroler PDnya adalah
Ilustrasi (lanjutan)
Dasar Sistem Kontrol, Kuliah 12
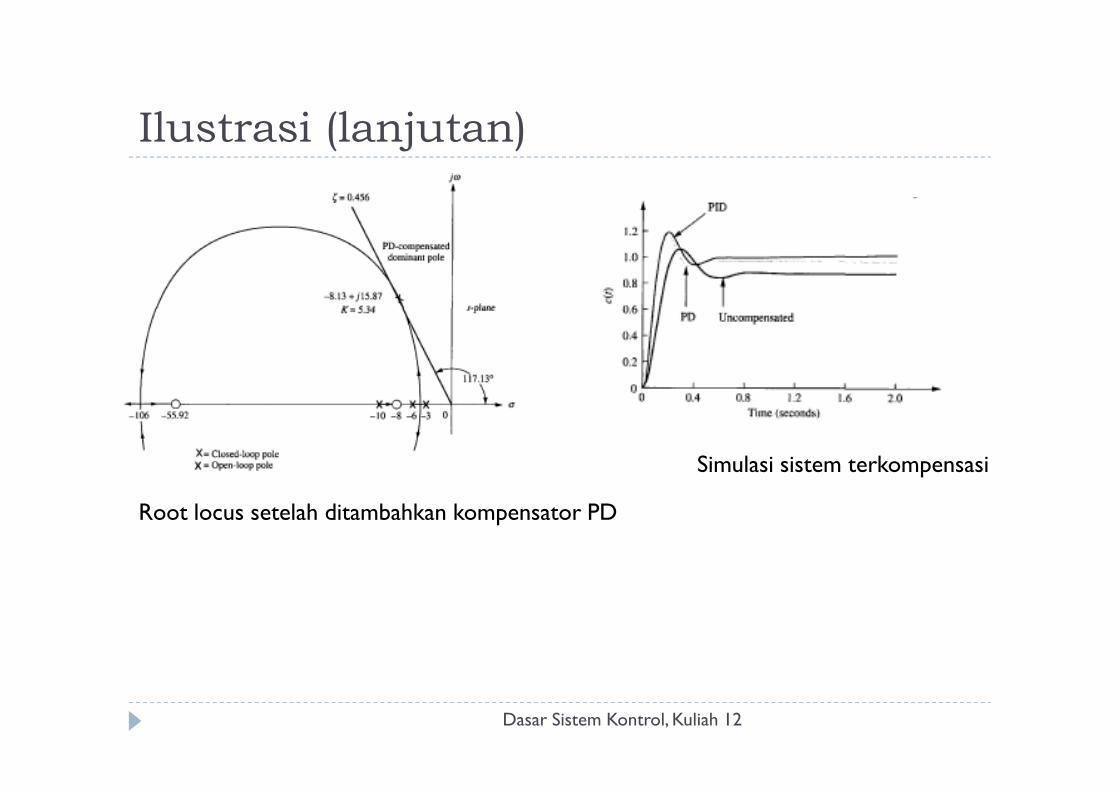
Simulasi sistem terkompensasi
Root locus setelah ditambahkan kompensator PD
Ilustrasi (lanjutan)
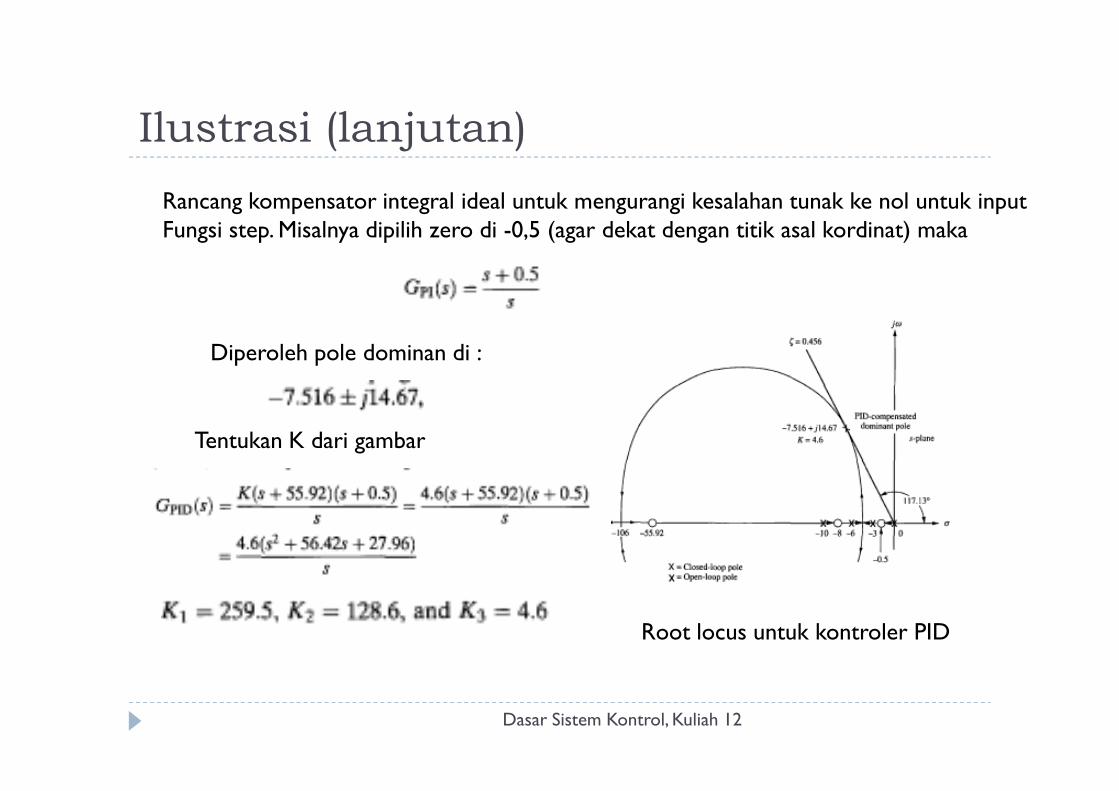
Rancang kompensator integral ideal untuk mengurangi kesalahan tunak ke nol untuk inputFungsi step. Misalnya dipilih zero di -0,5 (agar dekat dengan titik asal kordinat) maka
Diperoleh pole dominan di :
Dasar Sistem Kontrol, Kuliah 12
Root locus untuk kontroler PID
Tentukan K dari gambar
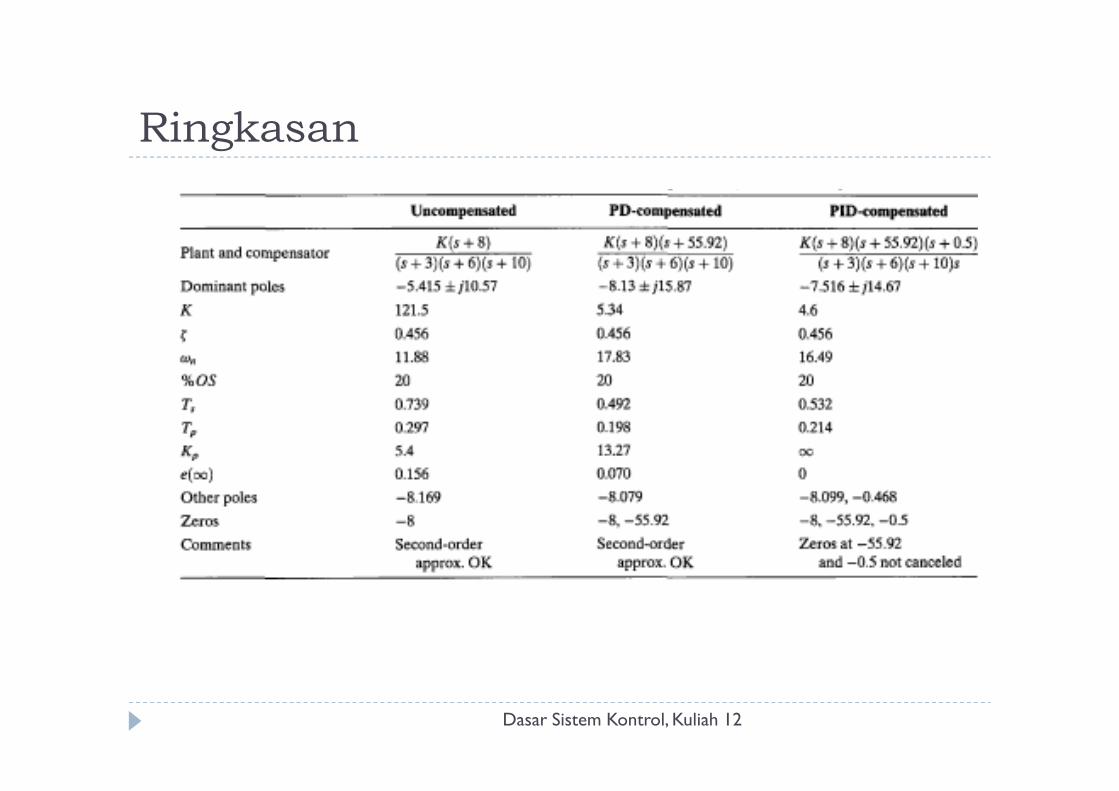
Ringkasan
Dasar Sistem Kontrol, Kuliah 12
Kompensator Lag-Lead
Prosedur :Evaluasi unjuk kerja sistem awal untuk menentukan sejauh mana peningkatanrespons transien yang diperlukanRancang kompensator lead untuk memenuhi spesifikasi respons transien yangdiinginkan yang mencakup lokasi zero, lokasi pole dan gainSimulasi sistem untuk melihat apakah persyaratan terpenuhiRancang ulang jika tidak memenuhi syaratEvaluasi kesalahan tunak dari sistem setelah di kompensasi lead untuk menentukan
Dasar Sistem Kontrol, Kuliah 12
Evaluasi kesalahan tunak dari sistem setelah di kompensasi lead untuk menentukanpengurangan kesalahan tunak yang diperlukanRancang kompensator lag untuk memenuhi kesalahan tunak yang diinginkanSimulasi sistem apakah memenuhi syarat atau tidakRancang ulang jika sistem tidak memenuhi syarat
Contoh
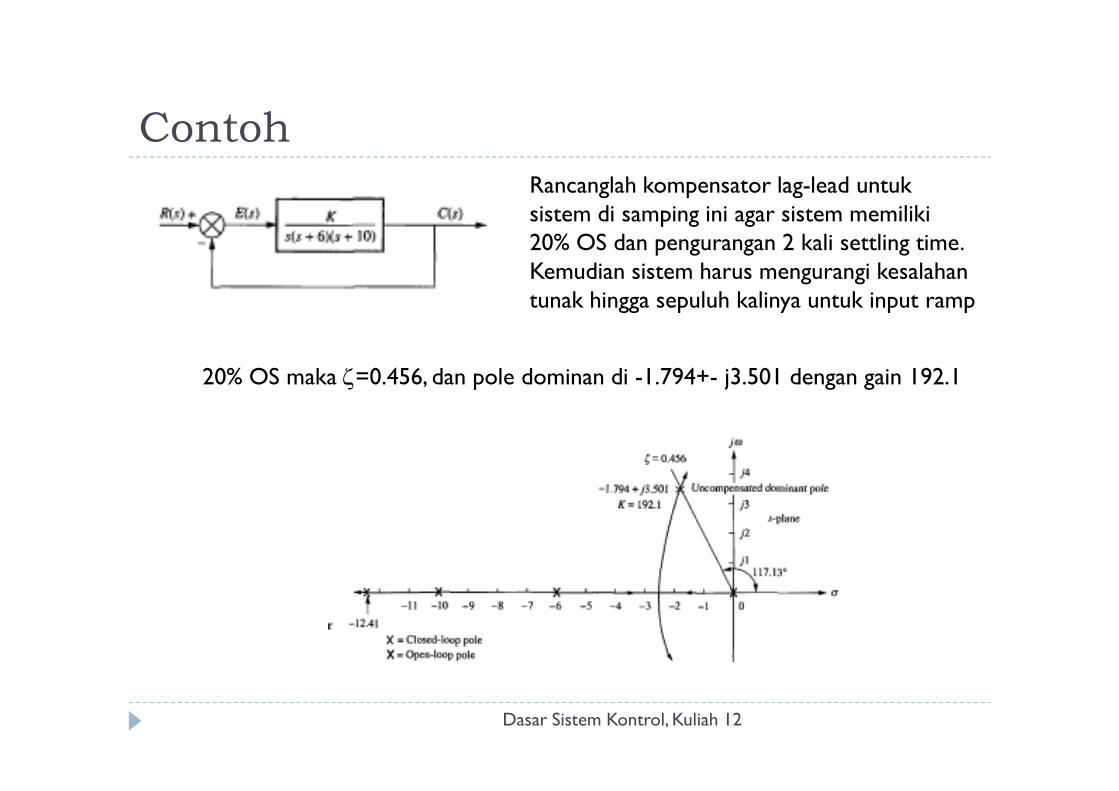
Rancanglah kompensator lag-lead untuksistem di samping ini agar sistem memiliki20% OS dan pengurangan 2 kali settling time.Kemudian sistem harus mengurangi kesalahantunak hingga sepuluh kalinya untuk input ramp
20% OS maka ζ=0.456, dan pole dominan di -1.794+- j3.501 dengan gain 192.1
Dasar Sistem Kontrol, Kuliah 12
Contoh (lanjutan)
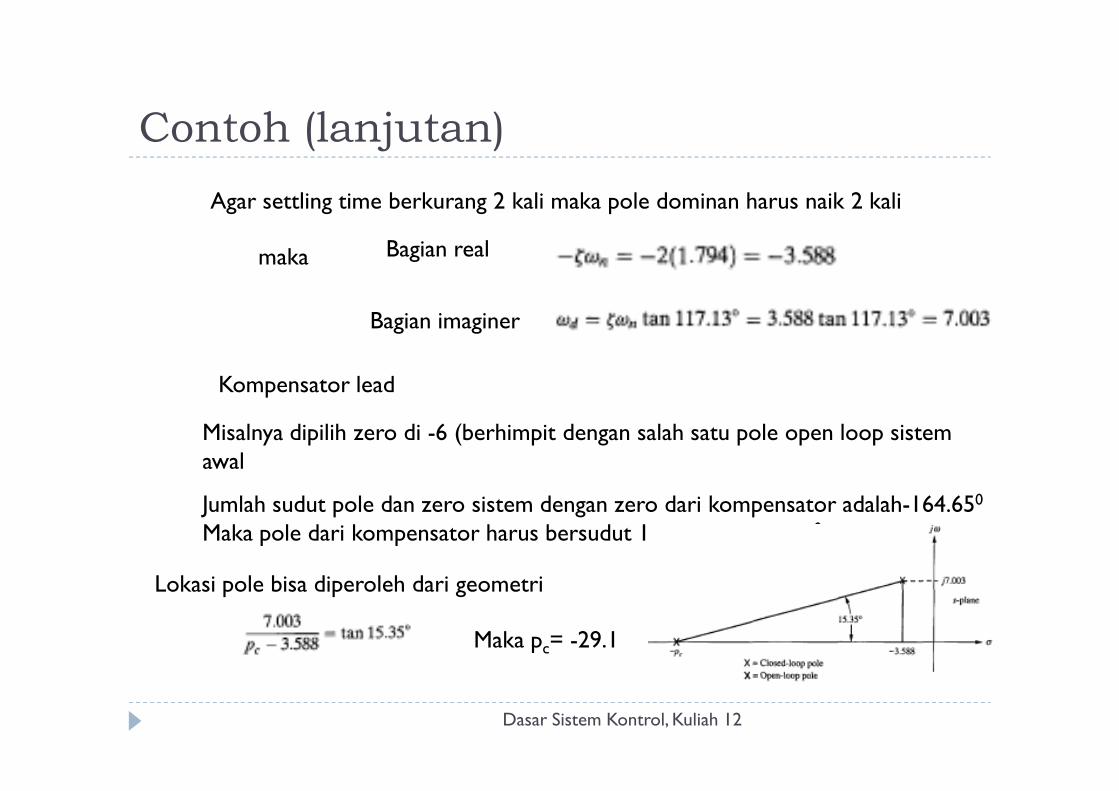
Agar settling time berkurang 2 kali maka pole dominan harus naik 2 kali
maka Bagian real
Bagian imaginer
Kompensator lead
Dasar Sistem Kontrol, Kuliah 12
Kompensator lead
Misalnya dipilih zero di -6 (berhimpit dengan salah satu pole open loop sistemawal
Jumlah sudut pole dan zero sistem dengan zero dari kompensator adalah-164.650
Maka pole dari kompensator harus bersudut 164.65-180=15.350
Lokasi pole bisa diperoleh dari geometri
Maka pc= -29.1
Contoh (lanjutan)
Dasar Sistem Kontrol, Kuliah 12
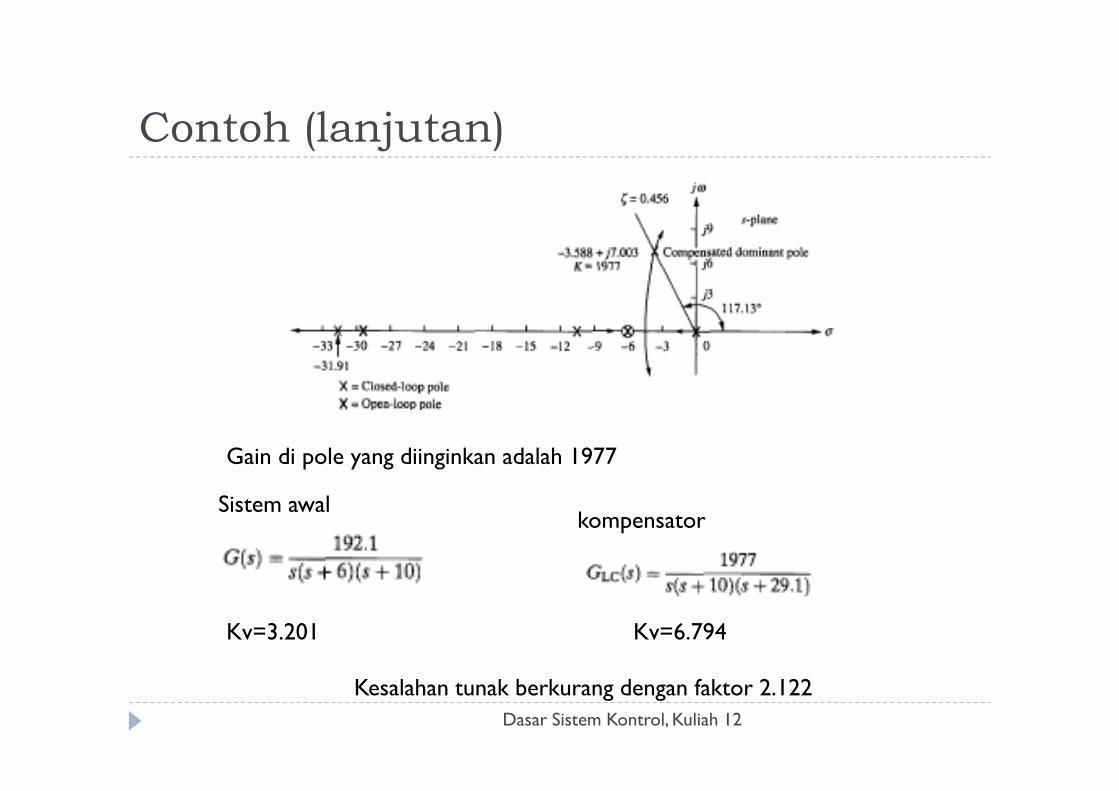
Gain di pole yang diinginkan adalah 1977
Sistem awalkompensator
Kv=3.201 Kv=6.794
Kesalahan tunak berkurang dengan faktor 2.122
Contoh (lanjutan)
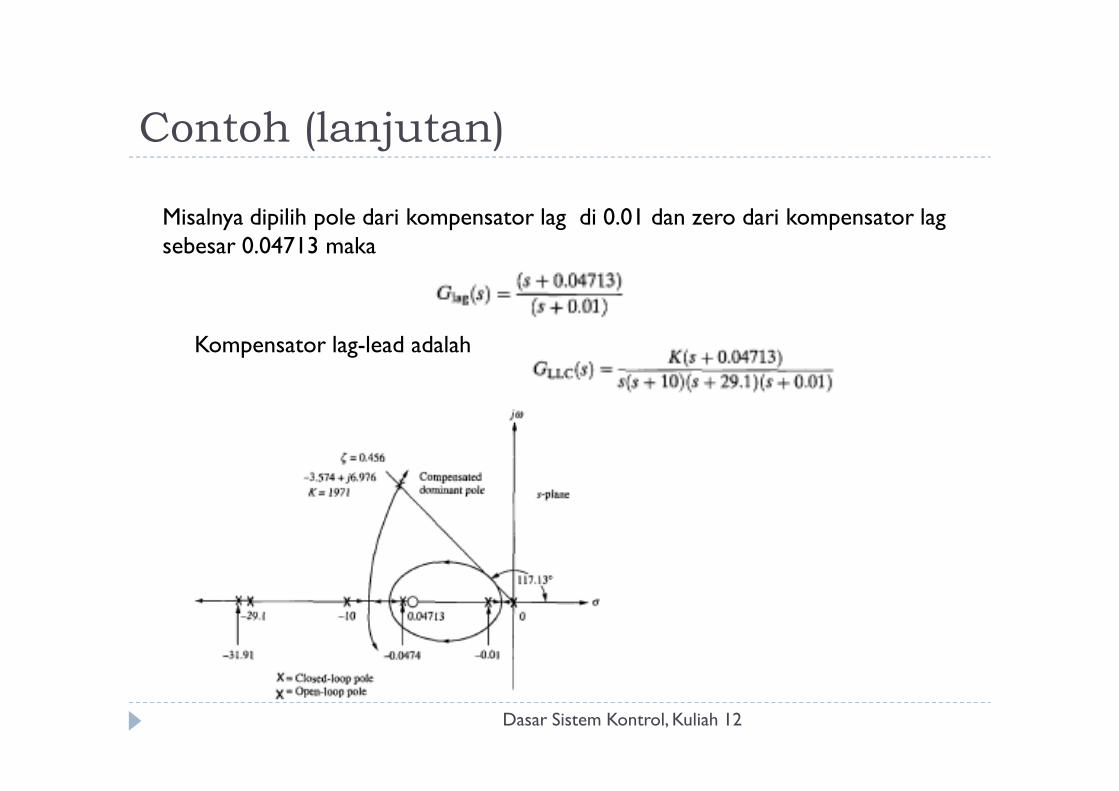
Misalnya dipilih pole dari kompensator lag di 0.01 dan zero dari kompensator lag sebesar 0.04713 maka
Kompensator lag-lead adalah
Dasar Sistem Kontrol, Kuliah 12
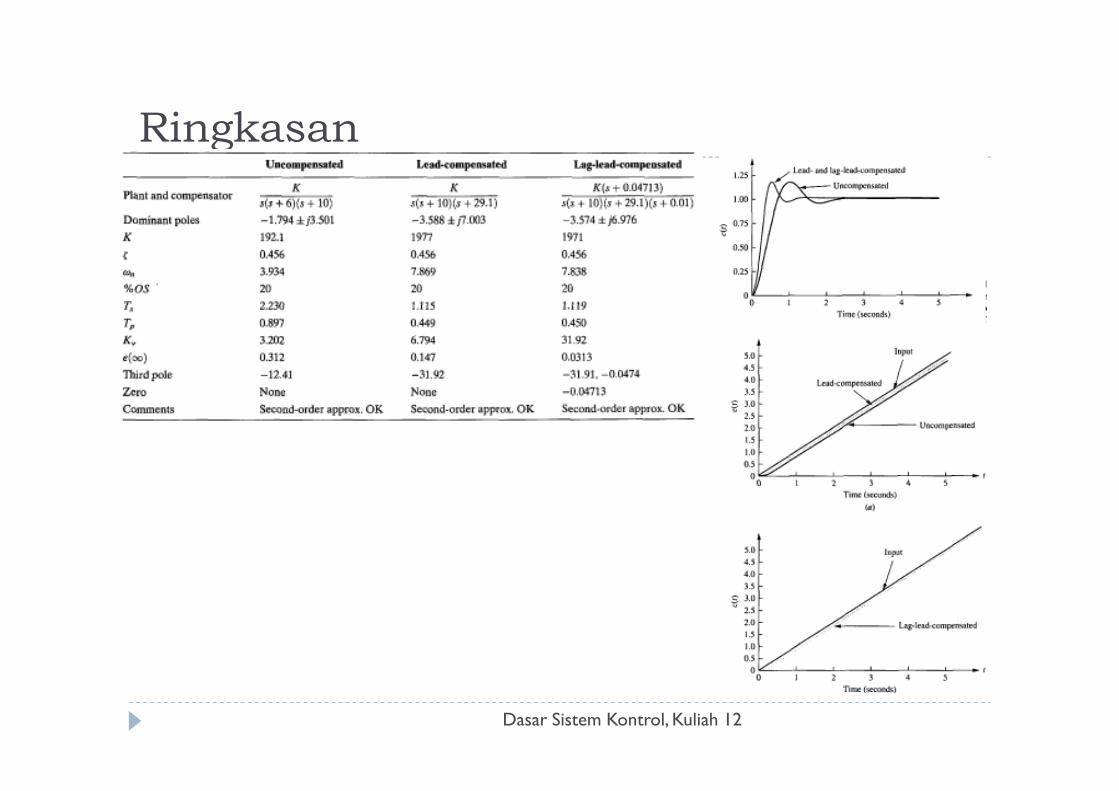
Ringkasan
Dasar Sistem Kontrol, Kuliah 12
Contoh (lanjutan)
Kompensator lag harus dirancang agar mengurangi kesalahan tunak dengan faktor10/2.122 =4 .173 dari sistem dengan kompensator lead
Dasar Sistem Kontrol, Kuliah 12


















