PEP 332: Mathematical Methods PEP 332 Mathematical Methods...
17
PEP 332: Mathematical Methods for Physicists COURSE MATERIALS Textbook(s): Mathematical Methods for Students of Physics and Related Fields (2nd Ed.) by Sadri Hassani, Springer 2009 Mathematical Methods Using Mathematica for Students of Physics and Related Fields (1st Ed.) by Sadri Hassani, Springer 2003 Materials: Mathematica PEP 332 Mathematical Methods for Physicists Department of Physics Fall 2015 Lecture Times: Monday 12:00pm - 2:30pm Classroom Location: Babbio Center for Technology 312 Instructor: Jeff Grube Contact Info: [email protected] Office Hours: Burchard room 709, Monday 2:30pm - 3:30pm Prerequisite(s): MA121, MA122, MA123, MA124, MA221, MA227 Corequisite(s): none
-
Upload
nguyenthuy -
Category
Documents
-
view
276 -
download
1
Transcript of PEP 332: Mathematical Methods PEP 332 Mathematical Methods...
PEP 332: Mathematical Methods for PhysicistsPEP 332 Mathematical Methods for PhysicistsDepartment of Physics
Fall 2015
Lecture Times: Monday 12:00pm - 2:30pm (will change!) Classroom Location: Babbio Center for Technology 312 (might change!)Instructor: Jeff Grube Contact Info: [email protected] Office Hours: Burchard room 709, Friday 12:00pm - 1:00pm Prerequisite(s): MA121, MA122, MA123, MA124, MA221, MA227 Corequisite(s): none
COURSE DESCRIPTIONThis course is intended to bridge the gap between the mathematical and problem solving skills of lower and upper division Physics courses. In the course the student will explore with analytical, numerical, and graphical methods the concepts required for advanced Mechanics, Electromagnetism, Relativity, and Quantum Mechanics. The use of Mathematica in this course is intended to further computational skills, in addition to acting as a powerful tool for solving problems.
FORMAT AND STRUCTUREThis course comprises of lectures, homework problems, one midterm exam, and one final exam.
COURSE MATERIALSTextbook(s): Mathematical Methods for Students of Physics and Related Fields (2nd Ed.)
by Sadri Hassani, Springer 2009
Mathematical Methods Using Mathematica for Students of Physics and Related Fields (1st Ed.)
by Sadri Hassani, Springer 2003
Materials: Mathematica
COURSE REQUIREMENTSAttendance Lecture attendance is essential, and includes Mathematica group workParticipation Collaborative problem solving during lecturesHomework pen and paper problems, and Mathematica workbook problemsQuizzes noneExams One written midterm exam, and one written final exam
1
!
PEP 332 Mathematical Methods for Physicists Department of Physics
Fall 2015
Lecture Times: Monday 12:00pm - 2:30pm Classroom Location: Babbio Center for Technology 312 Instructor: Jeff Grube Contact Info: [email protected] Office Hours: Burchard room 709, Monday 2:30pm - 3:30pm Prerequisite(s): MA121, MA122, MA123, MA124, MA221, MA227 Corequisite(s): none
COURSE DESCRIPTION This course is intended to bridge the gap between the mathematical and problem solving skills of lower and upper division Physics courses. In the course the student will explore with analytical, numerical, and graphical methods the concepts required for advanced Mechanics, Electromagnetism, Relativity, and Quantum Mechanics. The use of Mathematica in this course is intended to further computational skills, in addition to acting as a powerful tool for solving problems.
FORMAT AND STRUCTURE This course comprises of lectures, homework problems, one midterm exam, and one final exam.
COURSE MATERIALS Textbook(s): Mathematical Methods for Students of Physics and Related Fields (2nd Ed.)
by Sadri Hassani, Springer 2009
Mathematical Methods Using Mathematica for Students of Physics and Related Fields (1st Ed.)
by Sadri Hassani, Springer 2003
Materials: Mathematica
COURSE REQUIREMENTS Attendance Lecture attendance is essential, and includes Mathematica group work Participation Collaborative problem solving during lectures Homework pen and paper problems, and Mathematica workbook problems Quizzes none Exams One written midterm exam, and one written final exam
!1
Syllabus
PEP 332 Mathematical Methods for PhysicistsDepartment of Physics
Fall 2015
Lecture Times: Monday 12:00pm - 2:30pm (will change!) Classroom Location: Babbio Center for Technology 312 (might change!)Instructor: Jeff Grube Contact Info: [email protected] Office Hours: Burchard room 709, Friday 12:00pm - 1:00pm Prerequisite(s): MA121, MA122, MA123, MA124, MA221, MA227 Corequisite(s): none
COURSE DESCRIPTIONThis course is intended to bridge the gap between the mathematical and problem solving skills of lower and upper division Physics courses. In the course the student will explore with analytical, numerical, and graphical methods the concepts required for advanced Mechanics, Electromagnetism, Relativity, and Quantum Mechanics. The use of Mathematica in this course is intended to further computational skills, in addition to acting as a powerful tool for solving problems.
FORMAT AND STRUCTUREThis course comprises of lectures, homework problems, one midterm exam, and one final exam.
COURSE MATERIALSTextbook(s): Mathematical Methods for Students of Physics and Related Fields (2nd Ed.)
by Sadri Hassani, Springer 2009
Mathematical Methods Using Mathematica for Students of Physics and Related Fields (1st Ed.)
by Sadri Hassani, Springer 2003
Materials: Mathematica
COURSE REQUIREMENTSAttendance Lecture attendance is essential, and includes Mathematica group workParticipation Collaborative problem solving during lecturesHomework pen and paper problems, and Mathematica workbook problemsQuizzes noneExams One written midterm exam, and one written final exam
1
PEP 332 Mathematical Methods for PhysicistsDepartment of Physics
Fall 2015
Lecture Times: Monday 12:00pm - 2:30pm (will change!) Classroom Location: Babbio Center for Technology 312 (might change!)Instructor: Jeff Grube Contact Info: [email protected] Office Hours: Burchard room 709, Friday 12:00pm - 1:00pm Prerequisite(s): MA121, MA122, MA123, MA124, MA221, MA227 Corequisite(s): none
COURSE DESCRIPTIONThis course is intended to bridge the gap between the mathematical and problem solving skills of lower and upper division Physics courses. In the course the student will explore with analytical, numerical, and graphical methods the concepts required for advanced Mechanics, Electromagnetism, Relativity, and Quantum Mechanics. The use of Mathematica in this course is intended to further computational skills, in addition to acting as a powerful tool for solving problems.
FORMAT AND STRUCTUREThis course comprises of lectures, homework problems, one midterm exam, and one final exam.
COURSE MATERIALSTextbook(s): Mathematical Methods for Students of Physics and Related Fields (2nd Ed.)
by Sadri Hassani, Springer 2009
Mathematical Methods Using Mathematica for Students of Physics and Related Fields (1st Ed.)
by Sadri Hassani, Springer 2003
Materials: Mathematica
COURSE REQUIREMENTSAttendance Lecture attendance is essential, and includes Mathematica group workParticipation Collaborative problem solving during lecturesHomework pen and paper problems, and Mathematica workbook problemsQuizzes noneExams One written midterm exam, and one written final exam
1GRADING PROCEDURESGrades will be based on:
Homework (45%)Midterm Exam (25%)Final Exam (30%)
ACADEMIC INTEGRITY
Undergraduate Honor SystemEnrollment into the undergraduate class of Stevens Institute of Technology signifies a student's commitment to the Honor System. Accordingly, the provisions of the Stevens Honor System apply to all undergraduate students in coursework and Honor Board proceedings. It is the responsibility of each student to become acquainted with and to uphold the ideals set forth in the Honor System Constitution. More information about the Honor System including the constitution, bylaws, investigative procedures, and the penalty matrix can be found online at http://web.stevens.edu/honor/
The following pledge shall be written in full and signed by every student on all submitted work (including, but not limited to, homework, projects, lab reports, code, quizzes and exams) that is assigned by the course instructor. No work shall be graded unless the pledge is written in full and signed.
“I pledge my honor that I have abided by the Stevens Honor System.”
Reporting Honor System ViolationsStudents who believe a violation of the Honor System has been committed should report it within ten business days of the suspected violation. Students have the option to remain anonymous and can report violations online at www.stevens.edu/honor.
EXAM ROOM CONDITIONSStudents may use non-programmable calculators in exams. Other electronic devices are not permitted.
LEARNING ACCOMMODATIONSStevens Institute of Technology is dedicated to providing appropriate accommodations to students with documented disabilities via the Student Counseling and Disability Services.
INCLUSIVITY STATEMENTStevens Institute of Technology believes that diversity and inclusiveness are essential to excellence in education and innovation. We ask all members of the community to:
• be open to the perspectives of others• appreciate the uniqueness of colleagues • communicate in a respectful manner• keep confidential discussions private
2
Syllabus
GRADING PROCEDURESGrades will be based on:
Homework (45%)Midterm Exam (25%)Final Exam (30%)
ACADEMIC INTEGRITY
Undergraduate Honor SystemEnrollment into the undergraduate class of Stevens Institute of Technology signifies a student's commitment to the Honor System. Accordingly, the provisions of the Stevens Honor System apply to all undergraduate students in coursework and Honor Board proceedings. It is the responsibility of each student to become acquainted with and to uphold the ideals set forth in the Honor System Constitution. More information about the Honor System including the constitution, bylaws, investigative procedures, and the penalty matrix can be found online at http://web.stevens.edu/honor/
The following pledge shall be written in full and signed by every student on all submitted work (including, but not limited to, homework, projects, lab reports, code, quizzes and exams) that is assigned by the course instructor. No work shall be graded unless the pledge is written in full and signed.
“I pledge my honor that I have abided by the Stevens Honor System.”
Reporting Honor System ViolationsStudents who believe a violation of the Honor System has been committed should report it within ten business days of the suspected violation. Students have the option to remain anonymous and can report violations online at www.stevens.edu/honor.
EXAM ROOM CONDITIONSStudents may use non-programmable calculators in exams. Other electronic devices are not permitted.
LEARNING ACCOMMODATIONSStevens Institute of Technology is dedicated to providing appropriate accommodations to students with documented disabilities via the Student Counseling and Disability Services.
INCLUSIVITY STATEMENTStevens Institute of Technology believes that diversity and inclusiveness are essential to excellence in education and innovation. We ask all members of the community to:
• be open to the perspectives of others• appreciate the uniqueness of colleagues • communicate in a respectful manner• keep confidential discussions private
2
SyllabusTENTATIVE COURSE SCHEDULE
Week Topic(s) Readings HW
1Outline of course, review of vector algebra, coordinate systems, fields and potentials, and differentiation B1: Ch 1, 2
2Introduction to Mathematica: vector fields, integrationApplication of integration to electrostatics and gravity
B1: Ch 3, 4B2: Ch 1, 3
3Linear Algebra: matrix multiplication and transformationMatrices and systems of equations in Mathematica
B1: Ch 6B2: Ch 2
due: HW1
4Determinant, Eigenvalues, Vectors in Relativity More linear algebra in Mathematica
B1: Ch 7, 8B2: Ch 2
due: HW2
5 Vectors and Derivatives: gradient, flux and divergence B1: Ch 12, 13
6Line integral and curl, Stokes theorem.Conservative Vector Fields B1: Ch 14
due: HW3
7Magnetic dipole, Poisson and Laplace equationsMaxwell’s equations B1: Ch 15
8Tensor Analysis: Kronecker delta, Levi-Civita symbolsdifferentiation of tensors, Riemann curvature tensor B1: Ch 17
due: HW4
9Infinite series, Maclaurin series, Fourier series, Gamma, Beta, and error functions. Bessel functions
B1: Ch 10, 11B2: Ch 4
10 Complex algebra, derivatives, and Cauchy integral formula B1: Ch 18, 19due: HW5
11 Separation of variables, first and second order differential equationsB1: Ch 22,23,24B2: Ch 3
12Numerical solutions of ordinary differential equations using Mathematica, Laplace’s equations
B1: Ch 25B2: Ch 5
due: HW6
13the heat equation, the Schrodinger equation, the wave equation. More numerical methods with Mathematica
B1: Ch 28B2: Ch 6
14 the Fourier transform and Green’s functions B1: Ch 29due: HW7
3
Syllabusabout your instructor● Prof. Grube’s research is in High-Energy Astrophysics● he finished his PhD in 2007 at the University of Leeds ● he has since been a postdoctoral researcher: - for 1.5 years at the University College Dublin (Ireland) - for 6 years at the Adler Planetarium (Chicago) and at the University of Chicago● he has also taught two courses in Astrophysics: - at the Illinois Institute of Technology - at Chicago State University
VERITAS observatory, Mt. Hopkins, Arizona veritas.sao.arizona.edu
Adler Planetarium
review: Vectors in a Plane (ch 1.1)4 Coordinate Systems and Vectors
a
b
a
a
b
b
b + a
a + b
∆r1
∆r2
∆R = ∆r 1+ ∆r 2
(a) (b)
A
C
B
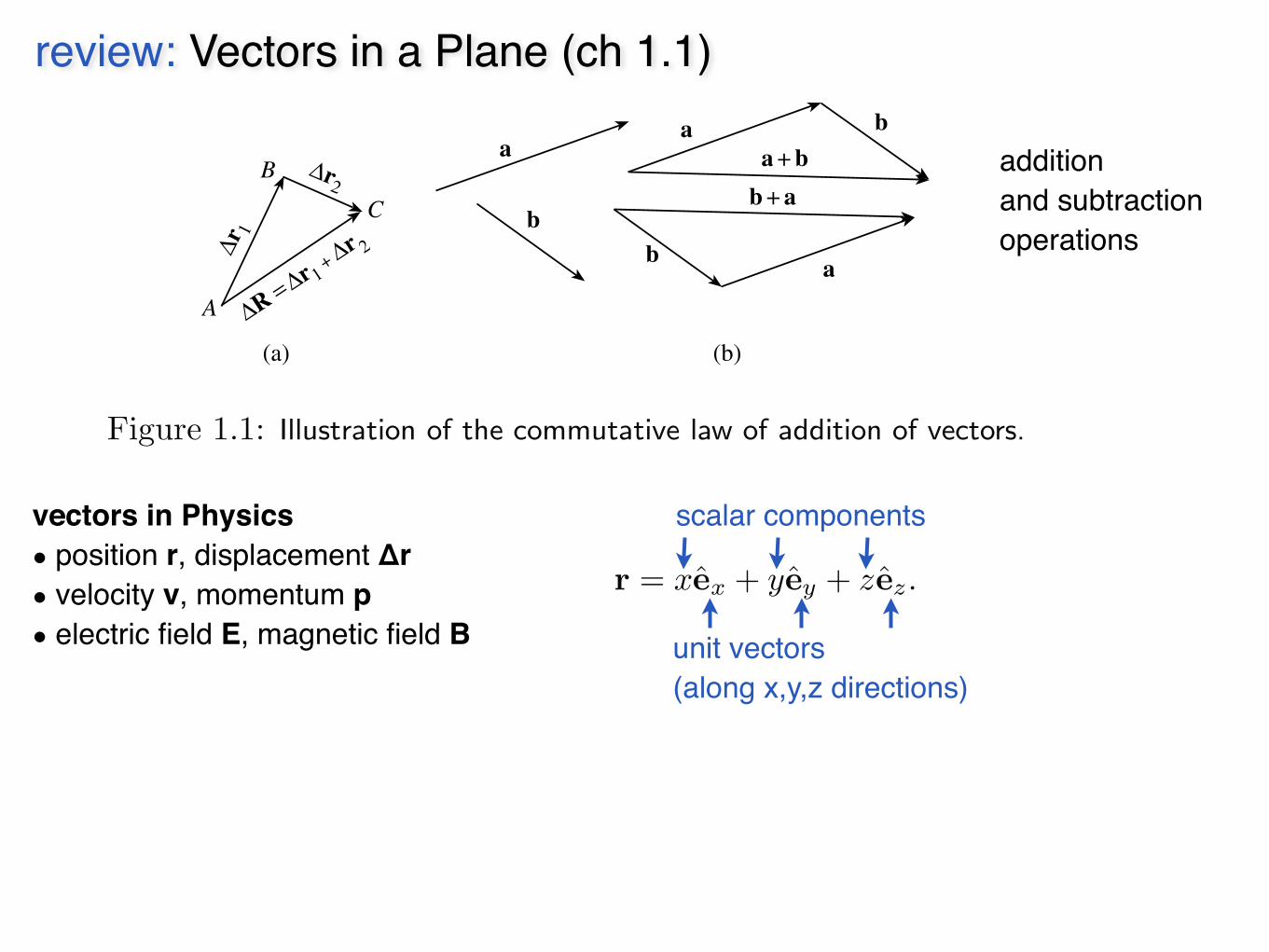
Figure 1.1: Illustration of the commutative law of addition of vectors.
can flip the direction of a vector by multiplying it by −1. That is, (−1)× r =−r is a vector having the same length as r but pointing in the oppositedirection. We can combine these two operations and think of multiplying avector by any real (positive or negative) number. The result is another vectoroperations on
vectors lying along the same line as the original vector. Thus, −0.732r is a vectorthat is 0.732 times as long as r and points in the opposite direction. The zerovector is obtained every time one multiplies any vector by the number zero.
Another operation is the addition of two vectors. This operation, withwhich we assume the reader to have some familiarity, is inspired by the obviousaddition law for displacements. In Figure 1.1(a), a displacement, ∆r1 fromA to B is added to the displacement ∆r2 from B to C to give ∆R theirresultant, or their sum, i.e., the displacement from A to C: ∆r1 +∆r2 = ∆R.Figure 1.1(b) shows that addition of vectors is commutative: a + b = b + a.It is also associative, a + (b + c) = (a + b) + c, i.e., the order in which youadd vectors is irrelevant. It is clear that a + 0 = 0 + a = a for any vector a.
Example 1.1.1. The parametric equation of a line through two given pointscan be obtained in vector form by noting that any point in space defines a vectorwhose components are the coordinates of the given point.2 If the components ofthe points P and Q in Figure 1.2 are, respectively, (px, py, pz) and (qx, qy , qz), thenwe can define vectors p and q with those components. An arbitrary point X withcomponents (x, y, z) will lie on the line PQ if and only if the vector x = (x, y, z)has its tip on that line. This will happen if and only if the vector joining P and X,namely x − p, is proportional to the vector joining P and Q, namely q − p. Thus,for some real number t, we must havevector form of the
parametricequation of a line
x− p = t(q− p) or x = t(q− p) + p.
This is the vector form of the equation of a line. We can write it in componentform by noting that the equality of vectors implies the equality of correspondingcomponents. Thus,
x = (qx − px)t + px,
y = (qy − py)t + py,
z = (qz − pz)t + pz,
which is the usual parametric equation for a line. !2We shall discuss components and coordinates in greater detail later in this chapter. For
now, the knowledge gained in calculus is sufficient for our discussion.
vectors in Physics● position r, displacement Δr● velocity v, momentum p● electric field E, magnetic field B
addition and subtractionoperations
1.3 Vectors in Different Coordinate Systems 19
x
y
z
O
P(ρ, ϕ, z)
ϕ
eϕ^
eρ^
ez^
z
ρ
Figure 1.12: Unit vectors of cylindrical coordinates.
The unit vectors at a point P in the other coordinate systems are obtainedsimilarly. In cylindrical coordinates, eρ lies along and points in the directionof increasing ρ at P ; eϕ is perpendicular to the plane formed by P and thez-axis and points in the direction of increasing ϕ; ez points in the direction ofpositive z (see Figure 1.12). We note that only ez is independent of the pointat which the unit vectors are defined because z is a fixed axis in cylindricalcoordinates. Given any vector a, we can write it as
a = aρeρ + aϕeϕ + azez or a = ⟨aρ, aϕ, az⟩. (1.15)
The unit vectors in spherical coordinates are defined similarly: er is takenalong r and points in the direction of increasing r; this direction is called radial directionradial; eθ is taken to lie in the plane formed by P and the z-axis, is per-pendicular to r, and points in the direction of increasing θ; eϕ is as in thecylindrical case (Figure 1.13). An arbitrary vector in space can be expressedin terms of the spherical unit vectors at P :
a = arer + aθeθ + aϕeϕ or a = ⟨ar, aθ, aϕ⟩. (1.16)
It should be emphasized that
Box 1.3.3. The cylindrical and spherical unit vectors eρ, er, eθ, and eϕ
are dependent on the position of P .
Once an origin O is designated, every point P in space will define a vector,called a position vector and denoted by r. This is simply the vector drawn position vectorfrom O to P . In Cartesian coordinates this vector has components ⟨x, y, z⟩,thus one can write
r = xex + yey + zez. (1.17)
unit vectors(along x,y,z directions)
scalar components
review: Dot Product (ch 1.1)
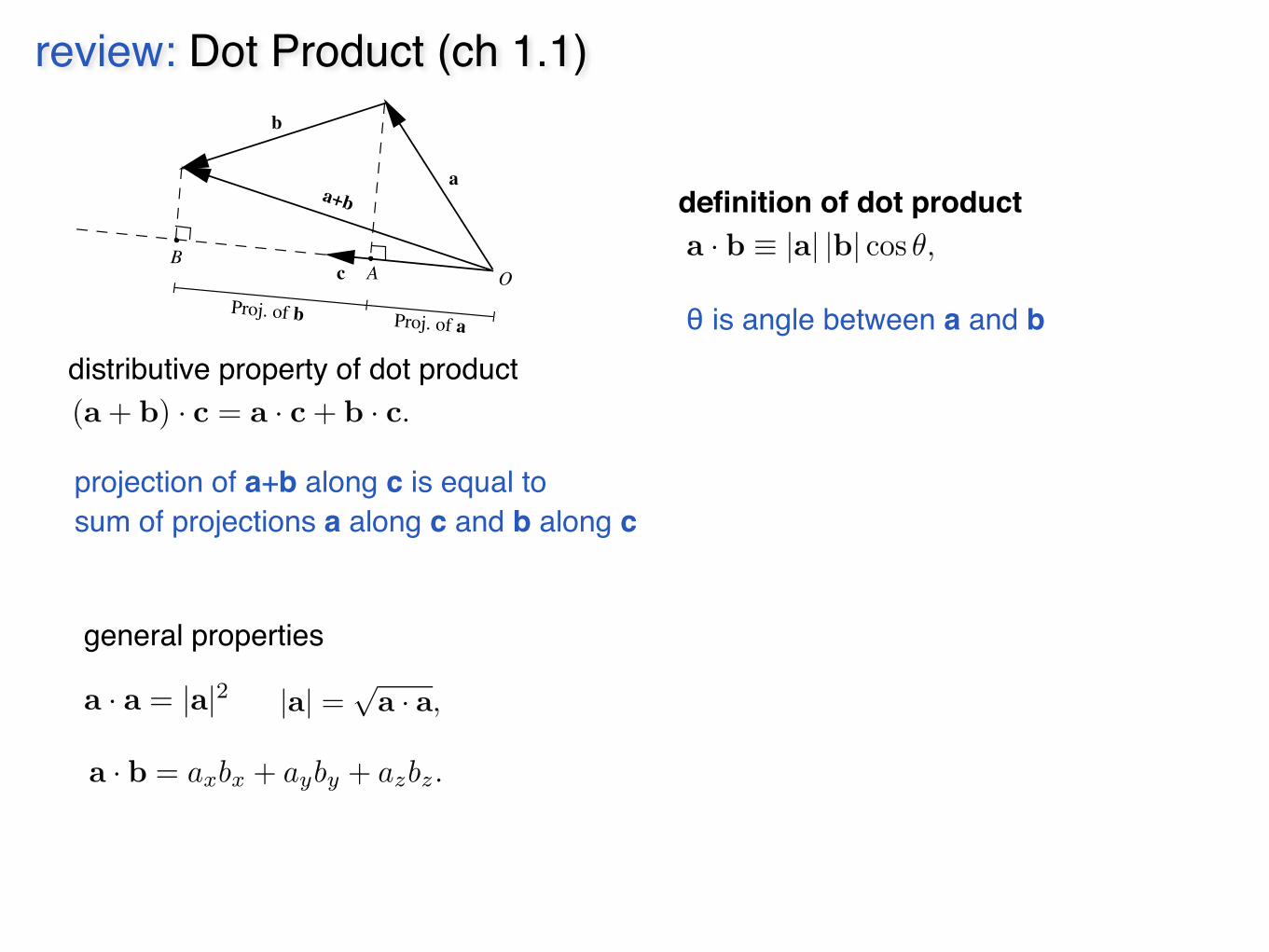
distributive property of dot product
projection of a+b along c is equal tosum of projections a along c and b along c
1.1 Vectors in a Plane and in Space 7
AB
O
a
b
a+b
c
Proj. of aProj. of b
Figure 1.4: The distributive property of the dot product is clearly demonstrated if weinterpret the dot product as the length of one vector times the projection of the othervector on the first.
One can use the distributive property of the dot product to show thatif (ax, ay, az) and (bx, by, bz) represent the components of a and b along theaxes x, y, and z, then dot product in
terms ofcomponentsa · b = axbx + ayby + azbz. (1.3)
From the definition of the dot product, we can draw an important conclu-sion. If we divide both sides of a · b = |a| |b| cos θ by |a|, we get
a · b|a| = |b| cos θ or
!a|a|
"· b = |b| cos θ ⇒ ea · b = |b| cos θ.
Noting that |b| cos θ is simply the projection of b along a, we concludea useful relation tobe used frequentlyin the sequel
Box 1.1.2. To find the perpendicular projection of a vector b alonganother vector a, take the dot product of b with ea, the unit vector along a.
Sometimes “component” is used for perpendicular projection. This is notentirely correct. For any set of three mutually perpendicular unit vectors inspace, Box 1.1.2 can be used to find the components of a vector along thethree unit vectors. Only if the unit vectors are mutually perpendicular docomponents and projections coincide.
1.1.2 Vector or Cross Product
Given two space vectors, a and b, we can find a third space vector c, calledthe cross product of a and b, and denoted by c = a × b. The magnitude cross product of
two space vectorsof c is defined by |c| = |a| |b| sin θ where θ is the angle between a and b.The direction of c is given by the right-hand rule: If a is turned to b (note
right-hand ruleexplainedthe order in which a and b appear here) through the angle between a and b,
6 Coordinate Systems and Vectors
N
v
F
Figure 1.3: No work is done by a force orthogonal to displacement. If such a workwere not zero, it would have to be positive or negative; but no consistent rule exists toassign a sign to the work.
The prime example is work which is defined as the scalar product of force anddisplacement. The presence of cos θ ensures the requirement that the workdone by a force perpendicular to the displacement is zero. If this requirementwere not met, we would have the precarious situation of Figure 1.3 in whichthe two vertical forces add up to zero but the total work done by them isnot zero! This is because it would be impossible to assign a “sign” to thework done by forces being displaced perpendicular to themselves, and makethe rule of such an assignment in such a way that the work of F in the figurecancels that of N. (The reader is urged to try to come up with a rule—e.g.,assigning a positive sign to the work if the velocity points to the right of theobserver and a negative sign if it points to the observer’s left—and see that itwill not work, no matter how elaborate it may be!) The only logical definitionof work is that which includes a cos θ factor.
The dot product is clearly commutative, a · b = b · a. Moreover, it dis-properties of dotproduct tributes over vector addition
(a + b) · c = a · c + b · c.
To see this, note that Equation (1.1) can be interpreted as the product of thelength of a with the projection of b along a. Now Figure 1.4 demonstrates4that the projection of a + b along c is the sum of the projections of a and balong c (see Problem 1.2 for details). The third property of the inner productis that a · a is always a positive number unless a is the zero vector in whichcase a · a = 0. In mathematics, the collection of these three properties—properties defining
the dot (inner)product
commutativity, positivity, and distribution over addition—defines a dot (orinner) product on a vector space.
The definition of the dot product leads directly to a · a = |a|2 or
|a| =√
a · a, (1.2)
which is useful in calculating the length of sums or differences of vectors.4Figure 1.4 appears to prove the distributive property only for vectors lying in the same
plane. However, the argument will be valid even if the three vectors are not coplanar.Instead of dropping perpendicular lines from the tips of a and b, one drops perpendicularplanes.
1.1 Vectors in a Plane and in Space 5
O
P
QX
x
y
z
pq
x
Figure 1.2: The parametric equation of a line in space can be obtained easily usingvectors.
There are some special vectors that are extremely useful in describingphysical quantities. These are the unit vectors. If one divides a vector use of unit vectorsby its length, one gets a unit vector in the direction of the original vector.Unit vectors are generally denoted by the symbol e with a subscript whichdesignates its direction. Thus, if we divided the vector a by its length |a| weget the unit vector ea in the direction of a. Turning this definition around,we have
Box 1.1.1. If we know the magnitude |a| of a vector quantity as well asits direction ea, we can construct the vector: a = |a|ea.
This construction will be used often in the sequel.The most commonly used unit vectors are those in the direction of coor- unit vectors along
the x-, y-, andz-axes
dinate axes. Thus ex, ey, and ez are the unit vectors pointing in the positivedirections of the x-, y-, and z-axes, respectively.3 We shall introduce unitvectors in other coordinate systems when we discuss those coordinate systemslater in this chapter.
1.1.1 Dot Product
The reader is no doubt familiar with the concept of dot product wherebytwo vectors are “multiplied” and the result is a number. The dot product ofa and b is defined by dot product
defineda · b ≡ |a| |b| cos θ, (1.1)
where |a| is the length of a, |b| is the length of b, and θ is the angle betweenthe two vectors. This definition is motivated by many physical situations.
3These unit vectors are usually denoted by i, j, and k, a notation that can be confusingwhen other non-Cartesian coordinates are used. We shall not use this notation, but adhereto the more suggestive notation introduced above.
definition of dot product
θ is angle between a and b
6 Coordinate Systems and Vectors
N
v
F
Figure 1.3: No work is done by a force orthogonal to displacement. If such a workwere not zero, it would have to be positive or negative; but no consistent rule exists toassign a sign to the work.
The prime example is work which is defined as the scalar product of force anddisplacement. The presence of cos θ ensures the requirement that the workdone by a force perpendicular to the displacement is zero. If this requirementwere not met, we would have the precarious situation of Figure 1.3 in whichthe two vertical forces add up to zero but the total work done by them isnot zero! This is because it would be impossible to assign a “sign” to thework done by forces being displaced perpendicular to themselves, and makethe rule of such an assignment in such a way that the work of F in the figurecancels that of N. (The reader is urged to try to come up with a rule—e.g.,assigning a positive sign to the work if the velocity points to the right of theobserver and a negative sign if it points to the observer’s left—and see that itwill not work, no matter how elaborate it may be!) The only logical definitionof work is that which includes a cos θ factor.
The dot product is clearly commutative, a · b = b · a. Moreover, it dis-properties of dotproduct tributes over vector addition
(a + b) · c = a · c + b · c.
To see this, note that Equation (1.1) can be interpreted as the product of thelength of a with the projection of b along a. Now Figure 1.4 demonstrates4that the projection of a + b along c is the sum of the projections of a and balong c (see Problem 1.2 for details). The third property of the inner productis that a · a is always a positive number unless a is the zero vector in whichcase a · a = 0. In mathematics, the collection of these three properties—properties defining
the dot (inner)product
commutativity, positivity, and distribution over addition—defines a dot (orinner) product on a vector space.
The definition of the dot product leads directly to a · a = |a|2 or
|a| =√
a · a, (1.2)
which is useful in calculating the length of sums or differences of vectors.4Figure 1.4 appears to prove the distributive property only for vectors lying in the same
plane. However, the argument will be valid even if the three vectors are not coplanar.Instead of dropping perpendicular lines from the tips of a and b, one drops perpendicularplanes.
6 Coordinate Systems and Vectors
N
v
F
Figure 1.3: No work is done by a force orthogonal to displacement. If such a workwere not zero, it would have to be positive or negative; but no consistent rule exists toassign a sign to the work.
The prime example is work which is defined as the scalar product of force anddisplacement. The presence of cos θ ensures the requirement that the workdone by a force perpendicular to the displacement is zero. If this requirementwere not met, we would have the precarious situation of Figure 1.3 in whichthe two vertical forces add up to zero but the total work done by them isnot zero! This is because it would be impossible to assign a “sign” to thework done by forces being displaced perpendicular to themselves, and makethe rule of such an assignment in such a way that the work of F in the figurecancels that of N. (The reader is urged to try to come up with a rule—e.g.,assigning a positive sign to the work if the velocity points to the right of theobserver and a negative sign if it points to the observer’s left—and see that itwill not work, no matter how elaborate it may be!) The only logical definitionof work is that which includes a cos θ factor.
The dot product is clearly commutative, a · b = b · a. Moreover, it dis-properties of dotproduct tributes over vector addition
(a + b) · c = a · c + b · c.
To see this, note that Equation (1.1) can be interpreted as the product of thelength of a with the projection of b along a. Now Figure 1.4 demonstrates4that the projection of a + b along c is the sum of the projections of a and balong c (see Problem 1.2 for details). The third property of the inner productis that a · a is always a positive number unless a is the zero vector in whichcase a · a = 0. In mathematics, the collection of these three properties—properties defining
the dot (inner)product
commutativity, positivity, and distribution over addition—defines a dot (orinner) product on a vector space.
The definition of the dot product leads directly to a · a = |a|2 or
|a| =√
a · a, (1.2)
which is useful in calculating the length of sums or differences of vectors.4Figure 1.4 appears to prove the distributive property only for vectors lying in the same
plane. However, the argument will be valid even if the three vectors are not coplanar.Instead of dropping perpendicular lines from the tips of a and b, one drops perpendicularplanes.
1.1 Vectors in a Plane and in Space 7
AB
O
a
b
a+b
c
Proj. of aProj. of b
Figure 1.4: The distributive property of the dot product is clearly demonstrated if weinterpret the dot product as the length of one vector times the projection of the othervector on the first.
One can use the distributive property of the dot product to show thatif (ax, ay, az) and (bx, by, bz) represent the components of a and b along theaxes x, y, and z, then dot product in
terms ofcomponentsa · b = axbx + ayby + azbz. (1.3)
From the definition of the dot product, we can draw an important conclu-sion. If we divide both sides of a · b = |a| |b| cos θ by |a|, we get
a · b|a| = |b| cos θ or
!a|a|
"· b = |b| cos θ ⇒ ea · b = |b| cos θ.
Noting that |b| cos θ is simply the projection of b along a, we concludea useful relation tobe used frequentlyin the sequel
Box 1.1.2. To find the perpendicular projection of a vector b alonganother vector a, take the dot product of b with ea, the unit vector along a.
Sometimes “component” is used for perpendicular projection. This is notentirely correct. For any set of three mutually perpendicular unit vectors inspace, Box 1.1.2 can be used to find the components of a vector along thethree unit vectors. Only if the unit vectors are mutually perpendicular docomponents and projections coincide.
1.1.2 Vector or Cross Product
Given two space vectors, a and b, we can find a third space vector c, calledthe cross product of a and b, and denoted by c = a × b. The magnitude cross product of
two space vectorsof c is defined by |c| = |a| |b| sin θ where θ is the angle between a and b.The direction of c is given by the right-hand rule: If a is turned to b (note
right-hand ruleexplainedthe order in which a and b appear here) through the angle between a and b,
general properties
PEP 332 Mathematical Methods for Physicists
Homework 1: Problems from Ch 1, 2 (Hassani 2009)due Monday 9/14
1.5 Problems 37
1.5 Problems
1.1. Find the equation of a line that passes through the following pairs ofpoints:
(a) (1, 0, 1) and (−1, 1, 0). (b) (2, 2,−1) and (−2,−1, 1).
(c) (1, 1, 1) and (−1, 1,−1). (d) (1, 1, 1) and (−2, 2, 0).
(e) (0, 2,−1) and (3,−1, 1). (f) (0, 1, 0) and (−1, 0,−1).
1.2. Use Figure 1.4 and the interpretation of the a · b as the product of thelength of a with the projection of b along a to show that
(a + b) · c = a · c + b · c.
1.3. Take the dot product of a = b−c with itself and prove the law of cosinesby interpreting the result geometrically. Note that the three vectors form atriangle.
1.4. Find the angle between a = 2ex + 3ey + ez and b = ex − 6ey + 2ez.
1.5. Find the angle between a = 9ex + ey − 6ez and b = 4ex − 6ey + 5ez.
1.6. Show that a = ex cosα + ey sin α and b = ex cosβ + ey sin β are unitvectors in the xy-plane making angles α and β with the x-axis. Then take theirdot product and obtain a formula for cos(α−β). Now use sinx = cos(π/2−x)to find the formula for sin(α − β).
1.7. Vectors a and b are the sides of a parallelogram, c and d are its diagonals,and θ is the angle between a and b. Show that
|c|2 + |d|2 = 2(|a|2 + |b|2)
and that|c|2 − |d|2 = 4|a| |b| cos θ.
1.8. Given a, b, and c—vectors from the origin to the points A, B, and C—show that the vector (a×b) + (b× c) + (c× a) is perpendicular to the planeABC.
1.9. Show that the vectors a = 2ex − ey + ez, b = ex − 3ey − 5ez, andc = 3ex − 4ey − 4ez form the sides of a right triangle.
1.10. (a) Find the vector form of the equation of the plane defined by the threepoints P , Q, and R with coordinates (p1, p2, p3), (q1, q2, q3), and (r1, r2, r3),respectively. Hint: The position vector of a point X = (x, y, z) in the planeis perpendicular to the cross product of
−−→PQ and
−→PR.
(b) Determine an equation for the plane passing through the points (2,−1, 1),(3, 2,−1), and (−1, 3, 2).
1.11. Derive the law of sines for a triangle using vectors.
1.5 Problems 37
1.5 Problems
1.1. Find the equation of a line that passes through the following pairs ofpoints:
(a) (1, 0, 1) and (−1, 1, 0). (b) (2, 2,−1) and (−2,−1, 1).
(c) (1, 1, 1) and (−1, 1,−1). (d) (1, 1, 1) and (−2, 2, 0).
(e) (0, 2,−1) and (3,−1, 1). (f) (0, 1, 0) and (−1, 0,−1).
1.2. Use Figure 1.4 and the interpretation of the a · b as the product of thelength of a with the projection of b along a to show that
(a + b) · c = a · c + b · c.
1.3. Take the dot product of a = b−c with itself and prove the law of cosinesby interpreting the result geometrically. Note that the three vectors form atriangle.
1.4. Find the angle between a = 2ex + 3ey + ez and b = ex − 6ey + 2ez.
1.5. Find the angle between a = 9ex + ey − 6ez and b = 4ex − 6ey + 5ez.
1.6. Show that a = ex cosα + ey sin α and b = ex cosβ + ey sin β are unitvectors in the xy-plane making angles α and β with the x-axis. Then take theirdot product and obtain a formula for cos(α−β). Now use sinx = cos(π/2−x)to find the formula for sin(α − β).
1.7. Vectors a and b are the sides of a parallelogram, c and d are its diagonals,and θ is the angle between a and b. Show that
|c|2 + |d|2 = 2(|a|2 + |b|2)
and that|c|2 − |d|2 = 4|a| |b| cos θ.
1.8. Given a, b, and c—vectors from the origin to the points A, B, and C—show that the vector (a×b) + (b× c) + (c× a) is perpendicular to the planeABC.
1.9. Show that the vectors a = 2ex − ey + ez, b = ex − 3ey − 5ez, andc = 3ex − 4ey − 4ez form the sides of a right triangle.
1.10. (a) Find the vector form of the equation of the plane defined by the threepoints P , Q, and R with coordinates (p1, p2, p3), (q1, q2, q3), and (r1, r2, r3),respectively. Hint: The position vector of a point X = (x, y, z) in the planeis perpendicular to the cross product of
−−→PQ and
−→PR.
(b) Determine an equation for the plane passing through the points (2,−1, 1),(3, 2,−1), and (−1, 3, 2).
1.11. Derive the law of sines for a triangle using vectors.
38 Coordinate Systems and Vectors
1.12. Using vectors, show that the diagonals of a rhombus are orthogonal.
1.13. Show that a necessary and sufficient condition for three vectors to bein the same plane is that the dot product of one with the cross product of theother two be zero.
1.14. Show that two nonzero vectors have the same direction if and only iftheir cross product vanishes.
1.15. Show the following vector identities by writing each vector in terms ofCartesian unit vectors and showing that each component of the LHS is equalto the corresponding component of the RHS.
(a) a · (b × c) = c · (a × b) = b · (c × a).
(b) a × (b × c) = b(a · c) − c(a · b), this is called the bac cab rule.
(c) (a × b) · (c × d) = (a · c)(b · d) − (a · d)(b · c).
(d) (a × b) × (c × d) = b[a · (c × d)] − a[b · (c × d)].
(e) (a × b) × (c × d) = c[a · (b × d)] − d[a · (b × c)].
(f) (a × b) · (a × b) = |a|2|b|2 − (a · b)2.
1.16. Convert the following triplets from the given coordinate system to theother two. All angles are in radians.Cartesian: (1, 2, 1), (0, 0, 1), (1,−1, 0), (0, 1, 0), (1, 1, 1), (2, 2, 2), (0, 0, 5),(1, 1, 0), (1, 0, 0).Spherical: (2, π/3, π/4), (5, 0, π/3), (3, π/3, 3π/4), (1, 1, 0), (1, 0, 0),(5, 0,♣), (3, π,♥), (0,♠,♦).Cylindrical: (0,♣, 4), (2, π, 0), (0, 217,−18), (1, 3π/4,−2), (1, 2, 3), (1, 0, 0).
1.17. Derive the second and third relations in Equation (1.21).
1.18. Points P and P ′ have spherical coordinates (r, θ, ϕ) and (r′, θ′, ϕ′),cylindrical coordinates (ρ, ϕ, z) and (ρ′, ϕ′, z′), and Cartesian coordinates(x, y, z) and (x′, y′, z′), respectively. Write |r − r′| in all three coordinatesystems. Hint: Use Equation (1.2) with a = r − r′ and r and r′ written interms of appropriate unit vectors.
1.19. Show that Equation (1.24) is independent of where we choose the originto be. Hint: Pick a different origin O′ whose position vector relative to O isR and write the equation in terms of position vectors relative to O′ and showthat the final result is the same as in Equation (1.24).
1.20. Three point charges are located at the corners of an equilateral triangleof sides a with the origin at the center of the triangle as shown in Figure 1.19.(a) Find the general expression for the electric field and electric potential at(0, 0, z).(b) Find a relation between q and Q such that the z-component of the fieldvanishes for all values of z. What are E and Φ for such charges?(c) Calculate E and Φ for z = a.1.5 Problems 39
x
y
q
q
Q
Figure 1.19:
1.21. A point charge Q and two point charges q are located in the xy-planeat the corners of an equilateral triangle of side a as shown in Figure 1.20.(a) Find the potential and the Cartesian components of the electrostatic fieldat (0, 0, z).(b) Show that it is impossible for E to be along the z-axis.(c) Calculate E for z = a and find Q in terms of q such that Ez vanishes forthis value of z.(d) What is the value of Φ at z = a for the charges found in (c)?
1.22. Three point charges each of magnitude Q and one point charge q arelocated at the corners of a square of side 2a. Using an appropriate coordinatesystem.(a) Find the electric field and potential at point P located on the diagonalfrom Q to q (and beyond) a distance 2
√2 a from the center.
(b) Find a relation, if it exists, between q and Q such that the field vanishesat P .
1.23. A charge q is located at the spherical coordinates (a, π/4, π/3). Findthe electrostatic potential and the Cartesian components of the electrostaticfield of this charge at a point P with spherical coordinates (a, π/6, π/4). Writethe field components as numerical multiples of keq/a2, and the potential as a
x
y
q
q
Q
Figure 1.20:
review: Dot Product (ch 1.1)
review: Cross Product (ch 1.1)
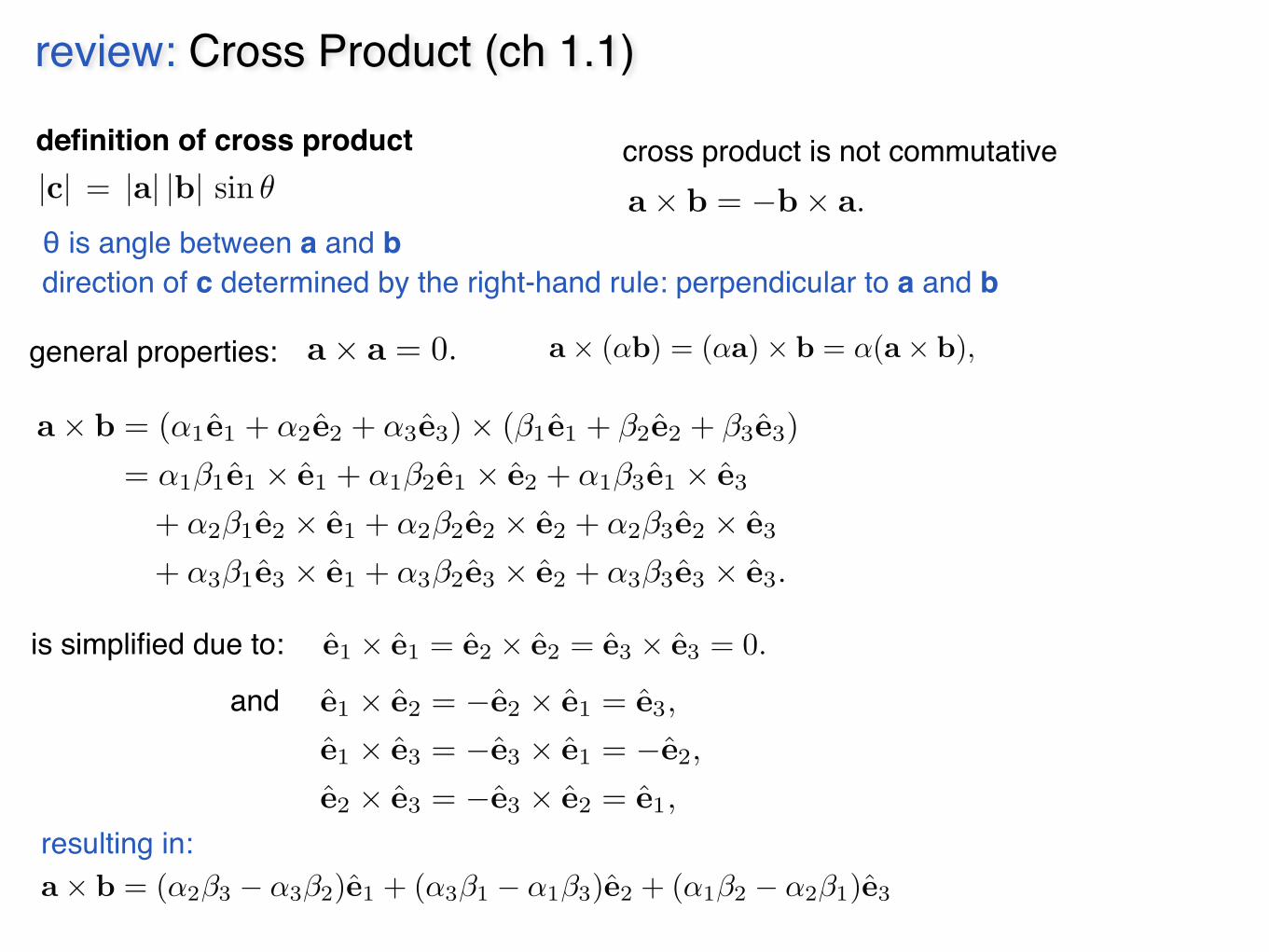
definition of cross product
θ is angle between a and bdirection of c determined by the right-hand rule: perpendicular to a and b
1.1 Vectors in a Plane and in Space 7
AB
O
a
b
a+b
c
Proj. of aProj. of b
Figure 1.4: The distributive property of the dot product is clearly demonstrated if weinterpret the dot product as the length of one vector times the projection of the othervector on the first.
One can use the distributive property of the dot product to show thatif (ax, ay, az) and (bx, by, bz) represent the components of a and b along theaxes x, y, and z, then dot product in
terms ofcomponentsa · b = axbx + ayby + azbz. (1.3)
From the definition of the dot product, we can draw an important conclu-sion. If we divide both sides of a · b = |a| |b| cos θ by |a|, we get
a · b|a| = |b| cos θ or
!a|a|
"· b = |b| cos θ ⇒ ea · b = |b| cos θ.
Noting that |b| cos θ is simply the projection of b along a, we concludea useful relation tobe used frequentlyin the sequel
Box 1.1.2. To find the perpendicular projection of a vector b alonganother vector a, take the dot product of b with ea, the unit vector along a.
Sometimes “component” is used for perpendicular projection. This is notentirely correct. For any set of three mutually perpendicular unit vectors inspace, Box 1.1.2 can be used to find the components of a vector along thethree unit vectors. Only if the unit vectors are mutually perpendicular docomponents and projections coincide.
1.1.2 Vector or Cross Product
Given two space vectors, a and b, we can find a third space vector c, calledthe cross product of a and b, and denoted by c = a × b. The magnitude cross product of
two space vectorsof c is defined by |c| = |a| |b| sin θ where θ is the angle between a and b.The direction of c is given by the right-hand rule: If a is turned to b (note
right-hand ruleexplainedthe order in which a and b appear here) through the angle between a and b,
8 Coordinate Systems and Vectors
a (right-handed) screw that is perpendicular to a and b will advance in thedirection of a × b. This definition implies that
a × b = −b× a.
This property is described by saying that the cross product is antisymmet-cross product isantisymmetric ric. The definition also implies that
a · (a × b) = b · (a × b) = 0.
That is, a × b is perpendicular to both a and b.5The vector product has the following properties:
a × (αb) = (αa) × b = α(a × b), a × b = −b× a,
a × (b + c) = a × b + a × c, a × a = 0. (1.4)
Using these properties, we can write the vector product of two vectors in termsof their components. We are interested in a more general result valid in othercoordinate systems as well. So, rather than using x, y, and z as subscripts forunit vectors, we use the numbers 1, 2, and 3. In that case, our results cancross product in
terms ofcomponents
also be used for spherical and cylindrical coordinates which we shall discussshortly.
a × b = (α1e1 + α2e2 + α3e3) × (β1e1 + β2e2 + β3e3)= α1β1e1 × e1 + α1β2e1 × e2 + α1β3e1 × e3
+ α2β1e2 × e1 + α2β2e2 × e2 + α2β3e2 × e3
+ α3β1e3 × e1 + α3β2e3 × e2 + α3β3e3 × e3.
But, by the last property of Equation (1.4), we have
e1 × e1 = e2 × e2 = e3 × e3 = 0.
Also, if we assume that e1, e2, and e3 form a so-called right-handed set,i.e., ifright-handed set
of unit vectorse1 × e2 = −e2 × e1 = e3,
e1 × e3 = −e3 × e1 = −e2, (1.5)e2 × e3 = −e3 × e2 = e1,
then we obtain
a × b = (α2β3 − α3β2)e1 + (α3β1 − α1β3)e2 + (α1β2 − α2β1)e3
5This fact makes it clear why a × b is not defined in the plane. Although it is possibleto define a × b for vectors a and b lying in a plane, a × b will not lie in that plane (itwill be perpendicular to that plane). For the vector product, a and b (although lying in aplane) must be considered as space vectors.
cross product is not commutative
8 Coordinate Systems and Vectors
a (right-handed) screw that is perpendicular to a and b will advance in thedirection of a × b. This definition implies that
a × b = −b× a.
This property is described by saying that the cross product is antisymmet-cross product isantisymmetric ric. The definition also implies that
a · (a × b) = b · (a × b) = 0.
That is, a × b is perpendicular to both a and b.5The vector product has the following properties:
a × (αb) = (αa) × b = α(a × b), a × b = −b× a,
a × (b + c) = a × b + a × c, a × a = 0. (1.4)
Using these properties, we can write the vector product of two vectors in termsof their components. We are interested in a more general result valid in othercoordinate systems as well. So, rather than using x, y, and z as subscripts forunit vectors, we use the numbers 1, 2, and 3. In that case, our results cancross product in
terms ofcomponents
also be used for spherical and cylindrical coordinates which we shall discussshortly.
a × b = (α1e1 + α2e2 + α3e3) × (β1e1 + β2e2 + β3e3)= α1β1e1 × e1 + α1β2e1 × e2 + α1β3e1 × e3
+ α2β1e2 × e1 + α2β2e2 × e2 + α2β3e2 × e3
+ α3β1e3 × e1 + α3β2e3 × e2 + α3β3e3 × e3.
But, by the last property of Equation (1.4), we have
e1 × e1 = e2 × e2 = e3 × e3 = 0.
Also, if we assume that e1, e2, and e3 form a so-called right-handed set,i.e., ifright-handed set
of unit vectorse1 × e2 = −e2 × e1 = e3,
e1 × e3 = −e3 × e1 = −e2, (1.5)e2 × e3 = −e3 × e2 = e1,
then we obtain
a × b = (α2β3 − α3β2)e1 + (α3β1 − α1β3)e2 + (α1β2 − α2β1)e3
5This fact makes it clear why a × b is not defined in the plane. Although it is possibleto define a × b for vectors a and b lying in a plane, a × b will not lie in that plane (itwill be perpendicular to that plane). For the vector product, a and b (although lying in aplane) must be considered as space vectors.
8 Coordinate Systems and Vectors
a (right-handed) screw that is perpendicular to a and b will advance in thedirection of a × b. This definition implies that
a × b = −b× a.
This property is described by saying that the cross product is antisymmet-cross product isantisymmetric ric. The definition also implies that
a · (a × b) = b · (a × b) = 0.
That is, a × b is perpendicular to both a and b.5The vector product has the following properties:
a × (αb) = (αa) × b = α(a × b), a × b = −b× a,
a × (b + c) = a × b + a × c, a × a = 0. (1.4)
Using these properties, we can write the vector product of two vectors in termsof their components. We are interested in a more general result valid in othercoordinate systems as well. So, rather than using x, y, and z as subscripts forunit vectors, we use the numbers 1, 2, and 3. In that case, our results cancross product in
terms ofcomponents
also be used for spherical and cylindrical coordinates which we shall discussshortly.
a × b = (α1e1 + α2e2 + α3e3) × (β1e1 + β2e2 + β3e3)= α1β1e1 × e1 + α1β2e1 × e2 + α1β3e1 × e3
+ α2β1e2 × e1 + α2β2e2 × e2 + α2β3e2 × e3
+ α3β1e3 × e1 + α3β2e3 × e2 + α3β3e3 × e3.
But, by the last property of Equation (1.4), we have
e1 × e1 = e2 × e2 = e3 × e3 = 0.
Also, if we assume that e1, e2, and e3 form a so-called right-handed set,i.e., ifright-handed set
of unit vectorse1 × e2 = −e2 × e1 = e3,
e1 × e3 = −e3 × e1 = −e2, (1.5)e2 × e3 = −e3 × e2 = e1,
then we obtain
a × b = (α2β3 − α3β2)e1 + (α3β1 − α1β3)e2 + (α1β2 − α2β1)e3
5This fact makes it clear why a × b is not defined in the plane. Although it is possibleto define a × b for vectors a and b lying in a plane, a × b will not lie in that plane (itwill be perpendicular to that plane). For the vector product, a and b (although lying in aplane) must be considered as space vectors.
8 Coordinate Systems and Vectors
a (right-handed) screw that is perpendicular to a and b will advance in thedirection of a × b. This definition implies that
a × b = −b× a.
This property is described by saying that the cross product is antisymmet-cross product isantisymmetric ric. The definition also implies that
a · (a × b) = b · (a × b) = 0.
That is, a × b is perpendicular to both a and b.5The vector product has the following properties:
a × (αb) = (αa) × b = α(a × b), a × b = −b× a,
a × (b + c) = a × b + a × c, a × a = 0. (1.4)
Using these properties, we can write the vector product of two vectors in termsof their components. We are interested in a more general result valid in othercoordinate systems as well. So, rather than using x, y, and z as subscripts forunit vectors, we use the numbers 1, 2, and 3. In that case, our results cancross product in
terms ofcomponents
also be used for spherical and cylindrical coordinates which we shall discussshortly.
a × b = (α1e1 + α2e2 + α3e3) × (β1e1 + β2e2 + β3e3)= α1β1e1 × e1 + α1β2e1 × e2 + α1β3e1 × e3
+ α2β1e2 × e1 + α2β2e2 × e2 + α2β3e2 × e3
+ α3β1e3 × e1 + α3β2e3 × e2 + α3β3e3 × e3.
But, by the last property of Equation (1.4), we have
e1 × e1 = e2 × e2 = e3 × e3 = 0.
Also, if we assume that e1, e2, and e3 form a so-called right-handed set,i.e., ifright-handed set
of unit vectorse1 × e2 = −e2 × e1 = e3,
e1 × e3 = −e3 × e1 = −e2, (1.5)e2 × e3 = −e3 × e2 = e1,
then we obtain
a × b = (α2β3 − α3β2)e1 + (α3β1 − α1β3)e2 + (α1β2 − α2β1)e3
5This fact makes it clear why a × b is not defined in the plane. Although it is possibleto define a × b for vectors a and b lying in a plane, a × b will not lie in that plane (itwill be perpendicular to that plane). For the vector product, a and b (although lying in aplane) must be considered as space vectors.
general properties:
8 Coordinate Systems and Vectors
a (right-handed) screw that is perpendicular to a and b will advance in thedirection of a × b. This definition implies that
a × b = −b× a.
This property is described by saying that the cross product is antisymmet-cross product isantisymmetric ric. The definition also implies that
a · (a × b) = b · (a × b) = 0.
That is, a × b is perpendicular to both a and b.5The vector product has the following properties:
a × (αb) = (αa) × b = α(a × b), a × b = −b× a,
a × (b + c) = a × b + a × c, a × a = 0. (1.4)
Using these properties, we can write the vector product of two vectors in termsof their components. We are interested in a more general result valid in othercoordinate systems as well. So, rather than using x, y, and z as subscripts forunit vectors, we use the numbers 1, 2, and 3. In that case, our results cancross product in
terms ofcomponents
also be used for spherical and cylindrical coordinates which we shall discussshortly.
a × b = (α1e1 + α2e2 + α3e3) × (β1e1 + β2e2 + β3e3)= α1β1e1 × e1 + α1β2e1 × e2 + α1β3e1 × e3
+ α2β1e2 × e1 + α2β2e2 × e2 + α2β3e2 × e3
+ α3β1e3 × e1 + α3β2e3 × e2 + α3β3e3 × e3.
But, by the last property of Equation (1.4), we have
e1 × e1 = e2 × e2 = e3 × e3 = 0.
Also, if we assume that e1, e2, and e3 form a so-called right-handed set,i.e., ifright-handed set
of unit vectorse1 × e2 = −e2 × e1 = e3,
e1 × e3 = −e3 × e1 = −e2, (1.5)e2 × e3 = −e3 × e2 = e1,
then we obtain
a × b = (α2β3 − α3β2)e1 + (α3β1 − α1β3)e2 + (α1β2 − α2β1)e3
5This fact makes it clear why a × b is not defined in the plane. Although it is possibleto define a × b for vectors a and b lying in a plane, a × b will not lie in that plane (itwill be perpendicular to that plane). For the vector product, a and b (although lying in aplane) must be considered as space vectors.
is simplified due to:
and
8 Coordinate Systems and Vectors
a (right-handed) screw that is perpendicular to a and b will advance in thedirection of a × b. This definition implies that
a × b = −b× a.
This property is described by saying that the cross product is antisymmet-cross product isantisymmetric ric. The definition also implies that
a · (a × b) = b · (a × b) = 0.
That is, a × b is perpendicular to both a and b.5The vector product has the following properties:
a × (αb) = (αa) × b = α(a × b), a × b = −b× a,
a × (b + c) = a × b + a × c, a × a = 0. (1.4)
Using these properties, we can write the vector product of two vectors in termsof their components. We are interested in a more general result valid in othercoordinate systems as well. So, rather than using x, y, and z as subscripts forunit vectors, we use the numbers 1, 2, and 3. In that case, our results cancross product in
terms ofcomponents
also be used for spherical and cylindrical coordinates which we shall discussshortly.
a × b = (α1e1 + α2e2 + α3e3) × (β1e1 + β2e2 + β3e3)= α1β1e1 × e1 + α1β2e1 × e2 + α1β3e1 × e3
+ α2β1e2 × e1 + α2β2e2 × e2 + α2β3e2 × e3
+ α3β1e3 × e1 + α3β2e3 × e2 + α3β3e3 × e3.
But, by the last property of Equation (1.4), we have
e1 × e1 = e2 × e2 = e3 × e3 = 0.
Also, if we assume that e1, e2, and e3 form a so-called right-handed set,i.e., ifright-handed set
of unit vectorse1 × e2 = −e2 × e1 = e3,
e1 × e3 = −e3 × e1 = −e2, (1.5)e2 × e3 = −e3 × e2 = e1,
then we obtain
a × b = (α2β3 − α3β2)e1 + (α3β1 − α1β3)e2 + (α1β2 − α2β1)e3
5This fact makes it clear why a × b is not defined in the plane. Although it is possibleto define a × b for vectors a and b lying in a plane, a × b will not lie in that plane (itwill be perpendicular to that plane). For the vector product, a and b (although lying in aplane) must be considered as space vectors.
8 Coordinate Systems and Vectors
a (right-handed) screw that is perpendicular to a and b will advance in thedirection of a × b. This definition implies that
a × b = −b× a.
This property is described by saying that the cross product is antisymmet-cross product isantisymmetric ric. The definition also implies that
a · (a × b) = b · (a × b) = 0.
That is, a × b is perpendicular to both a and b.5The vector product has the following properties:
a × (αb) = (αa) × b = α(a × b), a × b = −b× a,
a × (b + c) = a × b + a × c, a × a = 0. (1.4)
Using these properties, we can write the vector product of two vectors in termsof their components. We are interested in a more general result valid in othercoordinate systems as well. So, rather than using x, y, and z as subscripts forunit vectors, we use the numbers 1, 2, and 3. In that case, our results cancross product in
terms ofcomponents
also be used for spherical and cylindrical coordinates which we shall discussshortly.
a × b = (α1e1 + α2e2 + α3e3) × (β1e1 + β2e2 + β3e3)= α1β1e1 × e1 + α1β2e1 × e2 + α1β3e1 × e3
+ α2β1e2 × e1 + α2β2e2 × e2 + α2β3e2 × e3
+ α3β1e3 × e1 + α3β2e3 × e2 + α3β3e3 × e3.
But, by the last property of Equation (1.4), we have
e1 × e1 = e2 × e2 = e3 × e3 = 0.
Also, if we assume that e1, e2, and e3 form a so-called right-handed set,i.e., ifright-handed set
of unit vectorse1 × e2 = −e2 × e1 = e3,
e1 × e3 = −e3 × e1 = −e2, (1.5)e2 × e3 = −e3 × e2 = e1,
then we obtain
a × b = (α2β3 − α3β2)e1 + (α3β1 − α1β3)e2 + (α1β2 − α2β1)e3
5This fact makes it clear why a × b is not defined in the plane. Although it is possibleto define a × b for vectors a and b lying in a plane, a × b will not lie in that plane (itwill be perpendicular to that plane). For the vector product, a and b (although lying in aplane) must be considered as space vectors.
resulting in:
review: Coordinate Systems (ch 1.2)
12 Coordinate Systems and Vectors
the “function” x is defined as giving the distance from P to the vertical axis,while θ is the function which gives the angle that the line OP makes with agiven fiducial (usually horizontal) line. The origin O and the fiducial line arecompletely arbitrary. Similarly, the functions r and y give distances from theorigin and to the horizontal axis, respectively.
Box 1.2.1. In practice, one drops the argument P and writes (x, y) and(r, θ).
We can generalize the above concepts to three dimensions. There are threecoordinate functions now. So for a point P in space we writethe three common
coordinatesystems:Cartesian,cylindrical andspherical
(f(P ), g(P ), h(P )),
where f , g, and h are functions on the three-dimensional space. There arethree widely used coordinate systems, Cartesian (x(P ), y(P ), z(P )), cylin-drical (ρ(P ), ϕ(P ), z(P )), and spherical (r(P ), θ(P ), ϕ(P )). ϕ(P ) is calledthe azimuth or the azimuthal angle of P , while θ(P ) is called its polarangle. To find the spherical coordinates of P , one chooses an arbitrary pointas the origin O and an arbitrary line through O called the polar axis. Onemeasures OP and calls it r(P ); θ(P ) is the angle between OP and the polaraxis. To find the third coordinate, we construct the plane through O and per-pendicular to the polar axis, drop a projection from P to the plane meetingthe latter at H , draw an arbitrary fiducial line through O in this plane, andmeasure the angle between this line and OH . This angle is ϕ(P ). Cartesianand cylindrical coordinate systems can be described similarly. The three co-ordinate systems are shown in Figure 1.8. As indicated in the figure, the polaraxis is usually taken to be the z-axis, and the fiducial line from which ϕ(P )is measured is chosen to be the x-axis. Although there are other coordinatesystems, the three mentioned above are by far the most widely used.
x
y
z
x(P)
y(P)
z(P)
P
(a) (b)x
y
z
P
z(P)
(P) H
ρ (P)
ϕ
(c)x
y
z
P
H(P)
r (P)θ (P)
ϕ
Figure 1.8: (a) Cartesian, (b) cylindrical, and (c) spherical coordinates of a point P inthree dimensions.
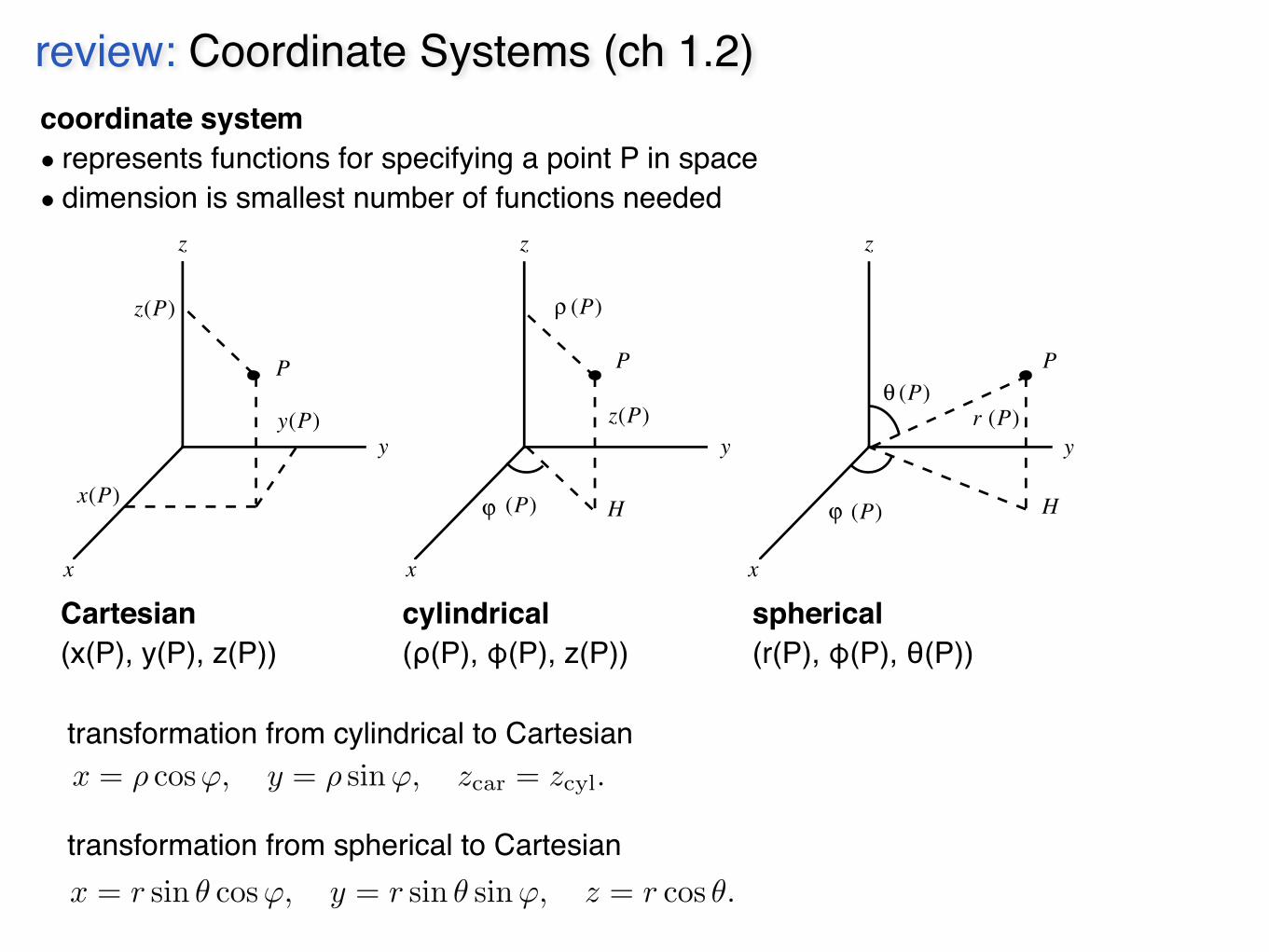
coordinate system● represents functions for specifying a point P in space● dimension is smallest number of functions needed
Cartesian(x(P), y(P), z(P))
cylindrical(ρ(P), φ(P), z(P))
spherical(r(P), φ(P), θ(P))
1.2 Coordinate Systems 13
Which one of the three systems of coordinates to use in a given physi-cal problem is dictated mainly by the geometry of that problem. As a rule,spherical coordinates are best suited for spheres and spherically symmetricproblems. Spherical symmetry describes situations in which quantities of in-terest are functions only of the distance from a fixed point and not on theorientation of that distance. Similarly, cylindrical coordinates ease calcula-tions when cylinders or cylindrical symmetries are involved. Finally, Cartesiancoordinates are used in rectangular geometries.
Of the three coordinate systems, Cartesian is the most complete in thefollowing sense: A point in space can have only one triplet as its coordinates.This property is not shared by the other two systems. For example, a point limitations of
non-Cartesiancoordinates
P located on the z-axis of a cylindrical coordinate system does not have awell-defined ϕ(P ). In practice, such imperfections are not of dire consequenceand we shall ignore them.
Once we have three coordinate systems to work with, we need to knowhow to translate from one to another. First we give the transformation rulefrom spherical to cylindrical. It is clear from Figure 1.9 that transformation
from spherical tocylindricalcoordinates
ρ = r sin θ, ϕcyl = ϕsph, z = r cos θ. (1.7)
Thus, given (r, θ, ϕ) of a point P , we can obtain (ρ, ϕ, z) of the same point bysubstituting in the RHS.
Next we give the transformation rule from cylindrical to Cartesian. Again transformationfrom cylindrical toCartesiancoordinates
Figure 1.9 gives the result:
x = ρ cosϕ, y = ρ sin ϕ, zcar = zcyl. (1.8)
We can combine (1.7) and (1.8) to connect Cartesian and spherical coordi- transformationfrom spherical toCartesiancoordinates
nates:x = r sin θ cosϕ, y = r sin θ sin ϕ, z = r cos θ. (1.9)
x
y
z
P
θr
ρ
ρ
ϕ
Figure 1.9: The relation between the cylindrical and spherical coordinates of a pointP can be obtained using this diagram.
transformation from cylindrical to Cartesian
transformation from spherical to Cartesian
1.2 Coordinate Systems 13
Which one of the three systems of coordinates to use in a given physi-cal problem is dictated mainly by the geometry of that problem. As a rule,spherical coordinates are best suited for spheres and spherically symmetricproblems. Spherical symmetry describes situations in which quantities of in-terest are functions only of the distance from a fixed point and not on theorientation of that distance. Similarly, cylindrical coordinates ease calcula-tions when cylinders or cylindrical symmetries are involved. Finally, Cartesiancoordinates are used in rectangular geometries.
Of the three coordinate systems, Cartesian is the most complete in thefollowing sense: A point in space can have only one triplet as its coordinates.This property is not shared by the other two systems. For example, a point limitations of
non-Cartesiancoordinates
P located on the z-axis of a cylindrical coordinate system does not have awell-defined ϕ(P ). In practice, such imperfections are not of dire consequenceand we shall ignore them.
Once we have three coordinate systems to work with, we need to knowhow to translate from one to another. First we give the transformation rulefrom spherical to cylindrical. It is clear from Figure 1.9 that transformation
from spherical tocylindricalcoordinates
ρ = r sin θ, ϕcyl = ϕsph, z = r cos θ. (1.7)
Thus, given (r, θ, ϕ) of a point P , we can obtain (ρ, ϕ, z) of the same point bysubstituting in the RHS.
Next we give the transformation rule from cylindrical to Cartesian. Again transformationfrom cylindrical toCartesiancoordinates
Figure 1.9 gives the result:
x = ρ cosϕ, y = ρ sin ϕ, zcar = zcyl. (1.8)
We can combine (1.7) and (1.8) to connect Cartesian and spherical coordi- transformationfrom spherical toCartesiancoordinates
nates:x = r sin θ cosϕ, y = r sin θ sin ϕ, z = r cos θ. (1.9)
x
y
z
P
θr
ρ
ρ
ϕ
Figure 1.9: The relation between the cylindrical and spherical coordinates of a pointP can be obtained using this diagram.
Fields and Potentials (ch 1.3)historical note● 1680s: Isaac Newton described gravitational force as an “action at a distance” ● open questions from this interpretation: - what agent carries this influence (if any)? - does the influence travel infinitely fast?
Isaac Newton
Michael Faraday
● 1830s: Michael Faraday’s concept of fields for visualizing electromagnetic effects ● force acting on object because object is in a field - the field is the agent transmitting the influence - gravitational and electromagnetic waves travel at the speed of light
Fields and Potentials (ch 1.3)1.3 Vectors in Different Coordinate Systems 23
x
y
z P1
P2r1
r2 − r1
r2
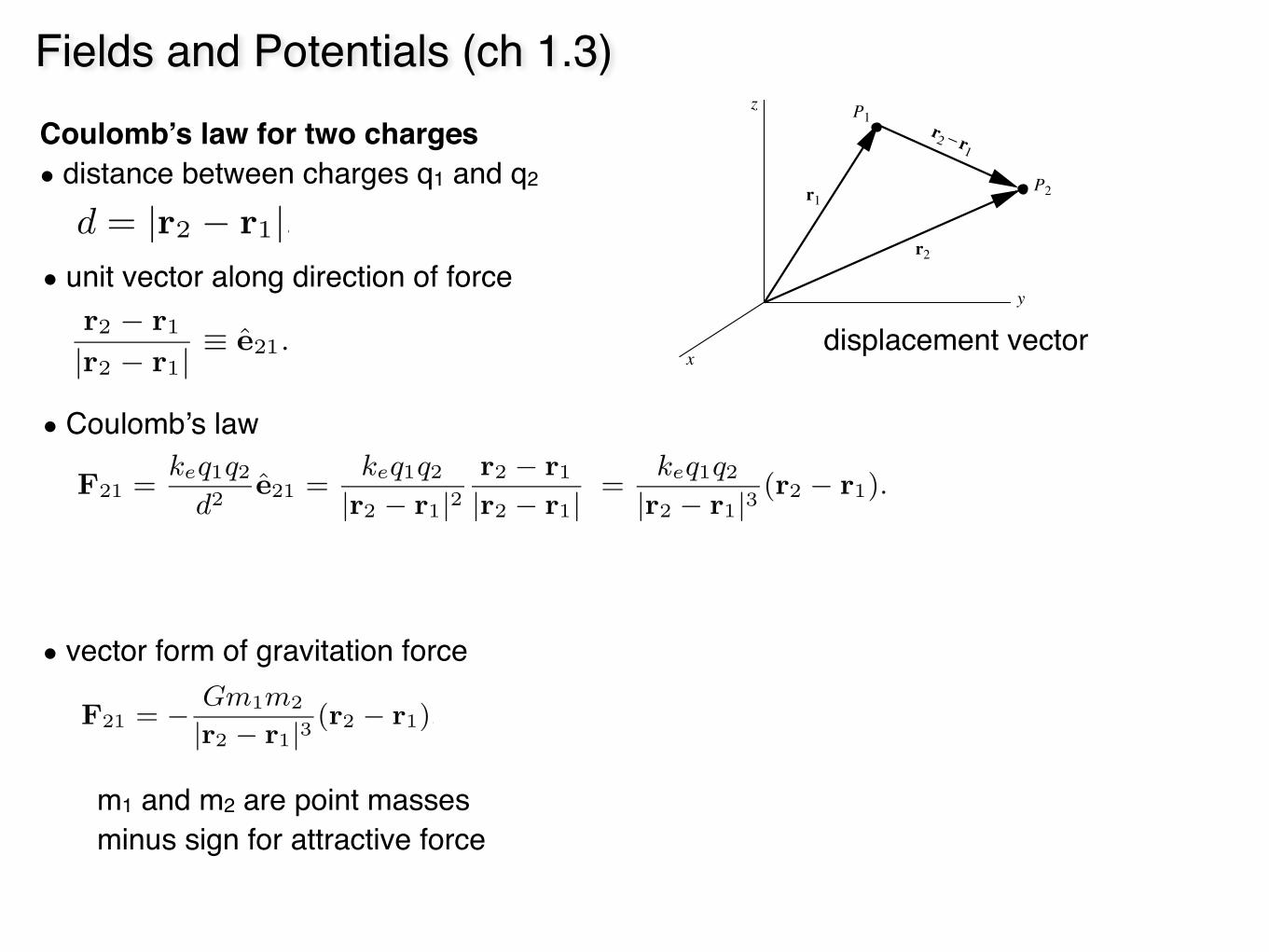
Figure 1.15: The displacement vector between P1 and P2 is the difference betweentheir position vectors.
Thus the components of Fq′ along the cylindrical unit vectors constructed at thelocation of q′ are !
keqq′ρ
(ρ2 + z2)3/2, 0,
keqq′z
(ρ2 + z2)3/2
".
!
Since r gives the position of a point in space, one can use it to writethe distance between two points P1 and P2 with position vectors r1 and r2.Figure 1.15 shows that r2 − r1 is the displacement vector from P1 to P2. Theimportance of this vector stems from the fact that many physical quantitiesare functions of distances between point particles, and r2−r1 is a concise wayof expressing this distance. The following example illustrates this.
Historical NotesDuring the second half of the eighteenth century many physicists were engaged in aquantitative study of electricity and magnetism. Charles Augustin de Coulomb,who developed the so-called torsion balance for measuring weak forces, is creditedwith the discovery of the law governing the force between electrical charges.
Coulomb was an army engineer in the West Indies. After spending nine yearsthere, due to his poor health, he returned to France about the same time that theFrench Revolution began, at which time he retired to the country to do scientific
Charles Coulomb1736–1806
research.Beside his experiments on electricity, Coulomb worked on applied mechanics,
structural analysis, the fracture of beams and columns, the thrust of arches, and thethrust of the soil.
At about the same time that Coulomb discovered the law of electricity, therelived in England a very reclusive character named Henry Cavendish. He wasborn into the nobility, had no close friends, was afraid of women, and disinterestedin music or arts of any kind. His life revolved around experiments in physics andchemistry that he carried out in a private laboratory located in his large mansion.
During his long life he published only a handful of relatively unimportant pa-pers. But after his death about one million pounds sterling were found in his bank
Henry Cavendish1731–1810
account and twenty bundles of notes in his laboratory. These notes remained inthe possession of his relatives for a long time, but when they were published one
Coulomb’s law for two charges● distance between charges q1 and q2
24 Coordinate Systems and Vectors
hundred years later, it became clear that Henry Cavendish was one of the greatestexperimental physicists ever. He discovered all the laws of electric and magneticinteractions at the same time as Coulomb, and his work in chemistry matches thatof Lavoisier. Furthermore, he used a torsion balance to measure the universal grav-itational constant for the first time, and as a result was able to arrive at the exactmass of the Earth.
Example 1.3.3. Coulomb’s law for two arbitrary chargesSuppose there are point charges q1 at P1 and q2 at P2. Let us write the force exertedon q2 by q1. The magnitude of the force is
F21 =keq1q2
d2,
where d = P1P2 is the distance between the two charges. We use d because theusual notation r has special meaning for us: it is one of the coordinates in sphericalsystems. If we multiply this magnitude by the unit vector describing the directionof the force, we obtain the full force vector (see Box 1.1.1). But, assuming repulsionfor the moment, this unit vector is
r2 − r1
|r2 − r1|≡ e21.
Also, since d = |r2 − r1|, we have
F21 =keq1q2
d2e21 =
keq1q2
|r2 − r1|2r2 − r1
|r2 − r1|
orCoulomb’s lawwhen charges arearbitrarily located
F21 =keq1q2
|r2 − r1|3(r2 − r1). (1.24)
Although we assumed repulsion, we see that (1.24) includes attraction as well. In-deed, if q1q2 < 0, F21 is opposite to r2−r1, i.e., F21 is directed from P2 to P1. SinceF21 is the force on q2 by q1, this is an attraction. We also note that Newton’s thirdlaw is included in (1.24):
F12 =keq2q1
|r1 − r2|3(r1 − r2) = −F21
because r2 − r1 = −(r1 − r2) and |r2 − r1| = |r1 − r2|.We can also write the gravitational force immediatelyvector form of
gravitational force
F21 = − Gm1m2
|r2 − r1|3(r2 − r1), (1.25)
where m1 and m2 are point masses and the minus sign is introduced to ensureattraction. !
Now that we have expressions for electric and gravitational forces, we canobtain the electric field of a point charge and the gravitational field of a pointmass. First recall that the electric field at a point P is defined to be theforce on a test charge q located at P divided by q. Thus if we have a chargeq1, at P1 with position vector r1 and we are interested in its fields at P with
24 Coordinate Systems and Vectors
hundred years later, it became clear that Henry Cavendish was one of the greatestexperimental physicists ever. He discovered all the laws of electric and magneticinteractions at the same time as Coulomb, and his work in chemistry matches thatof Lavoisier. Furthermore, he used a torsion balance to measure the universal grav-itational constant for the first time, and as a result was able to arrive at the exactmass of the Earth.
Example 1.3.3. Coulomb’s law for two arbitrary chargesSuppose there are point charges q1 at P1 and q2 at P2. Let us write the force exertedon q2 by q1. The magnitude of the force is
F21 =keq1q2
d2,
where d = P1P2 is the distance between the two charges. We use d because theusual notation r has special meaning for us: it is one of the coordinates in sphericalsystems. If we multiply this magnitude by the unit vector describing the directionof the force, we obtain the full force vector (see Box 1.1.1). But, assuming repulsionfor the moment, this unit vector is
r2 − r1
|r2 − r1|≡ e21.
Also, since d = |r2 − r1|, we have
F21 =keq1q2
d2e21 =
keq1q2
|r2 − r1|2r2 − r1
|r2 − r1|
orCoulomb’s lawwhen charges arearbitrarily located
F21 =keq1q2
|r2 − r1|3(r2 − r1). (1.24)
Although we assumed repulsion, we see that (1.24) includes attraction as well. In-deed, if q1q2 < 0, F21 is opposite to r2−r1, i.e., F21 is directed from P2 to P1. SinceF21 is the force on q2 by q1, this is an attraction. We also note that Newton’s thirdlaw is included in (1.24):
F12 =keq2q1
|r1 − r2|3(r1 − r2) = −F21
because r2 − r1 = −(r1 − r2) and |r2 − r1| = |r1 − r2|.We can also write the gravitational force immediatelyvector form of
gravitational force
F21 = − Gm1m2
|r2 − r1|3(r2 − r1), (1.25)
where m1 and m2 are point masses and the minus sign is introduced to ensureattraction. !
Now that we have expressions for electric and gravitational forces, we canobtain the electric field of a point charge and the gravitational field of a pointmass. First recall that the electric field at a point P is defined to be theforce on a test charge q located at P divided by q. Thus if we have a chargeq1, at P1 with position vector r1 and we are interested in its fields at P with
● unit vector along direction of force
● Coulomb’s law
24 Coordinate Systems and Vectors
hundred years later, it became clear that Henry Cavendish was one of the greatestexperimental physicists ever. He discovered all the laws of electric and magneticinteractions at the same time as Coulomb, and his work in chemistry matches thatof Lavoisier. Furthermore, he used a torsion balance to measure the universal grav-itational constant for the first time, and as a result was able to arrive at the exactmass of the Earth.
Example 1.3.3. Coulomb’s law for two arbitrary chargesSuppose there are point charges q1 at P1 and q2 at P2. Let us write the force exertedon q2 by q1. The magnitude of the force is
F21 =keq1q2
d2,
where d = P1P2 is the distance between the two charges. We use d because theusual notation r has special meaning for us: it is one of the coordinates in sphericalsystems. If we multiply this magnitude by the unit vector describing the directionof the force, we obtain the full force vector (see Box 1.1.1). But, assuming repulsionfor the moment, this unit vector is
r2 − r1
|r2 − r1|≡ e21.
Also, since d = |r2 − r1|, we have
F21 =keq1q2
d2e21 =
keq1q2
|r2 − r1|2r2 − r1
|r2 − r1|
orCoulomb’s lawwhen charges arearbitrarily located
F21 =keq1q2
|r2 − r1|3(r2 − r1). (1.24)
Although we assumed repulsion, we see that (1.24) includes attraction as well. In-deed, if q1q2 < 0, F21 is opposite to r2−r1, i.e., F21 is directed from P2 to P1. SinceF21 is the force on q2 by q1, this is an attraction. We also note that Newton’s thirdlaw is included in (1.24):
F12 =keq2q1
|r1 − r2|3(r1 − r2) = −F21
because r2 − r1 = −(r1 − r2) and |r2 − r1| = |r1 − r2|.We can also write the gravitational force immediatelyvector form of
gravitational force
F21 = − Gm1m2
|r2 − r1|3(r2 − r1), (1.25)
where m1 and m2 are point masses and the minus sign is introduced to ensureattraction. !
Now that we have expressions for electric and gravitational forces, we canobtain the electric field of a point charge and the gravitational field of a pointmass. First recall that the electric field at a point P is defined to be theforce on a test charge q located at P divided by q. Thus if we have a chargeq1, at P1 with position vector r1 and we are interested in its fields at P with
24 Coordinate Systems and Vectors
hundred years later, it became clear that Henry Cavendish was one of the greatestexperimental physicists ever. He discovered all the laws of electric and magneticinteractions at the same time as Coulomb, and his work in chemistry matches thatof Lavoisier. Furthermore, he used a torsion balance to measure the universal grav-itational constant for the first time, and as a result was able to arrive at the exactmass of the Earth.
Example 1.3.3. Coulomb’s law for two arbitrary chargesSuppose there are point charges q1 at P1 and q2 at P2. Let us write the force exertedon q2 by q1. The magnitude of the force is
F21 =keq1q2
d2,
where d = P1P2 is the distance between the two charges. We use d because theusual notation r has special meaning for us: it is one of the coordinates in sphericalsystems. If we multiply this magnitude by the unit vector describing the directionof the force, we obtain the full force vector (see Box 1.1.1). But, assuming repulsionfor the moment, this unit vector is
r2 − r1
|r2 − r1|≡ e21.
Also, since d = |r2 − r1|, we have
F21 =keq1q2
d2e21 =
keq1q2
|r2 − r1|2r2 − r1
|r2 − r1|
orCoulomb’s lawwhen charges arearbitrarily located
F21 =keq1q2
|r2 − r1|3(r2 − r1). (1.24)
Although we assumed repulsion, we see that (1.24) includes attraction as well. In-deed, if q1q2 < 0, F21 is opposite to r2−r1, i.e., F21 is directed from P2 to P1. SinceF21 is the force on q2 by q1, this is an attraction. We also note that Newton’s thirdlaw is included in (1.24):
F12 =keq2q1
|r1 − r2|3(r1 − r2) = −F21
because r2 − r1 = −(r1 − r2) and |r2 − r1| = |r1 − r2|.We can also write the gravitational force immediatelyvector form of
gravitational force
F21 = − Gm1m2
|r2 − r1|3(r2 − r1), (1.25)
where m1 and m2 are point masses and the minus sign is introduced to ensureattraction. !
Now that we have expressions for electric and gravitational forces, we canobtain the electric field of a point charge and the gravitational field of a pointmass. First recall that the electric field at a point P is defined to be theforce on a test charge q located at P divided by q. Thus if we have a chargeq1, at P1 with position vector r1 and we are interested in its fields at P with
displacement vector
24 Coordinate Systems and Vectors
hundred years later, it became clear that Henry Cavendish was one of the greatestexperimental physicists ever. He discovered all the laws of electric and magneticinteractions at the same time as Coulomb, and his work in chemistry matches thatof Lavoisier. Furthermore, he used a torsion balance to measure the universal grav-itational constant for the first time, and as a result was able to arrive at the exactmass of the Earth.
Example 1.3.3. Coulomb’s law for two arbitrary chargesSuppose there are point charges q1 at P1 and q2 at P2. Let us write the force exertedon q2 by q1. The magnitude of the force is
F21 =keq1q2
d2,
where d = P1P2 is the distance between the two charges. We use d because theusual notation r has special meaning for us: it is one of the coordinates in sphericalsystems. If we multiply this magnitude by the unit vector describing the directionof the force, we obtain the full force vector (see Box 1.1.1). But, assuming repulsionfor the moment, this unit vector is
r2 − r1
|r2 − r1|≡ e21.
Also, since d = |r2 − r1|, we have
F21 =keq1q2
d2e21 =
keq1q2
|r2 − r1|2r2 − r1
|r2 − r1|
orCoulomb’s lawwhen charges arearbitrarily located
F21 =keq1q2
|r2 − r1|3(r2 − r1). (1.24)
Although we assumed repulsion, we see that (1.24) includes attraction as well. In-deed, if q1q2 < 0, F21 is opposite to r2−r1, i.e., F21 is directed from P2 to P1. SinceF21 is the force on q2 by q1, this is an attraction. We also note that Newton’s thirdlaw is included in (1.24):
F12 =keq2q1
|r1 − r2|3(r1 − r2) = −F21
because r2 − r1 = −(r1 − r2) and |r2 − r1| = |r1 − r2|.We can also write the gravitational force immediatelyvector form of
gravitational force
F21 = − Gm1m2
|r2 − r1|3(r2 − r1), (1.25)
where m1 and m2 are point masses and the minus sign is introduced to ensureattraction. !
Now that we have expressions for electric and gravitational forces, we canobtain the electric field of a point charge and the gravitational field of a pointmass. First recall that the electric field at a point P is defined to be theforce on a test charge q located at P divided by q. Thus if we have a chargeq1, at P1 with position vector r1 and we are interested in its fields at P with
● vector form of gravitation force
m1 and m2 are point massesminus sign for attractive force
Fields and Potentials (ch 1.3)electric field● field at point P defined as force on test charge q (located at P) divided by q
1.3 Vectors in Different Coordinate Systems 25
position vector r, we introduce a charge q at r and calculate the force on qfrom Equation (1.24):
Fq =keq1q
|r− r1|3(r − r1).
Dividing by q gives electric field of apoint chargeE1 =
keq1
|r − r1|3(r − r1), (1.26)
where we have given the field the same index as the charge producing it.The calculation of the gravitational field follows similarly. The result is
g1 = − Gm1
|r − r1|3(r − r1). (1.27)
In (1.26) and (1.27), P is called the field point and P1 the source point. field point andsource pointNote that in both expressions, the field position vector comes first.
If there are several point charges (or masses) producing an electric (gravita-tional) field, we simply add the contributions from each source. The principle superposition
principle explainedbehind this procedure is called the superposition principle. It is a princi-ple that “seems” intuitively obvious, but upon further reflection its validitybecomes surprising. Suppose a charge q1 produces a field E1 around itself.Now we introduce a second charge q2 which, far away and isolated from anyother charges, produced a field E2 around itself. It is not at all obvious thatonce we move these charges together, the individual fields should not change.After all, this is not what happens to human beings! We act completely dif-ferently when we are alone than when we are in the company of others. Thepresence of others drastically changes our individual behaviors. Nevertheless,charges and masses, unfettered by any social chains, retain their individualityand produce fields as if no other charges were present.
It is important to keep in mind that the superposition principle appliesonly to point sources. For example, a charged conducting sphere will notproduce the same field when another charge is introduced nearby, because thepresence of the new charge alters the charge distribution of the sphere andindeed does change the sphere’s field. However each individual point charge(electron) on the sphere, whatever location on the sphere it happens to endup in, will retain its individual electric field.14
Going back to the electric field, we can write
E = E1 + E2 + · · · + En
for n point charges q1, q2, . . . , qn (see Figure 1.16). Substituting from (1.26),with appropriate indices, we obtain
E =keq1
|r − r1|3(r − r1) +
keq2
|r − r2|3(r − r2) + · · · + keqn
|r − rn|3(r − rn)
or, using the summation symbol, we obtain14The superposition principle, which in the case of electrostatics and gravity is needed
to calculate the fields of large sources consisting of many point sources, becomes a vitalpillar upon which quantum theory is built and by which many of the strange phenomenaof quantum physics are explained.
note: field has same index as charge q1 producing the field
P is the field point with position vector rP1 is the source point with position vector r1
gravitational field● field at point P defined as force on test mass m (located at P) divided by m
1.3 Vectors in Different Coordinate Systems 25
position vector r, we introduce a charge q at r and calculate the force on qfrom Equation (1.24):
Fq =keq1q
|r− r1|3(r − r1).
Dividing by q gives electric field of apoint chargeE1 =
keq1
|r − r1|3(r − r1), (1.26)
where we have given the field the same index as the charge producing it.The calculation of the gravitational field follows similarly. The result is
g1 = − Gm1
|r − r1|3(r − r1). (1.27)
In (1.26) and (1.27), P is called the field point and P1 the source point. field point andsource pointNote that in both expressions, the field position vector comes first.
If there are several point charges (or masses) producing an electric (gravita-tional) field, we simply add the contributions from each source. The principle superposition
principle explainedbehind this procedure is called the superposition principle. It is a princi-ple that “seems” intuitively obvious, but upon further reflection its validitybecomes surprising. Suppose a charge q1 produces a field E1 around itself.Now we introduce a second charge q2 which, far away and isolated from anyother charges, produced a field E2 around itself. It is not at all obvious thatonce we move these charges together, the individual fields should not change.After all, this is not what happens to human beings! We act completely dif-ferently when we are alone than when we are in the company of others. Thepresence of others drastically changes our individual behaviors. Nevertheless,charges and masses, unfettered by any social chains, retain their individualityand produce fields as if no other charges were present.
It is important to keep in mind that the superposition principle appliesonly to point sources. For example, a charged conducting sphere will notproduce the same field when another charge is introduced nearby, because thepresence of the new charge alters the charge distribution of the sphere andindeed does change the sphere’s field. However each individual point charge(electron) on the sphere, whatever location on the sphere it happens to endup in, will retain its individual electric field.14
Going back to the electric field, we can write
E = E1 + E2 + · · · + En
for n point charges q1, q2, . . . , qn (see Figure 1.16). Substituting from (1.26),with appropriate indices, we obtain
E =keq1
|r − r1|3(r − r1) +
keq2
|r − r2|3(r − r2) + · · · + keqn
|r − rn|3(r − rn)
or, using the summation symbol, we obtain14The superposition principle, which in the case of electrostatics and gravity is needed
to calculate the fields of large sources consisting of many point sources, becomes a vitalpillar upon which quantum theory is built and by which many of the strange phenomenaof quantum physics are explained.
Fields and Potentials (ch 1.3)superposition principle● for multiple test charges (or masses) producing an electric (or gravitational) field simply add the contribution from each source● charges (or masses) produce a field as if no other charges (or masses) are present● applies only for point sources
1.3 Vectors in Different Coordinate Systems 25
position vector r, we introduce a charge q at r and calculate the force on qfrom Equation (1.24):
Fq =keq1q
|r− r1|3(r − r1).
Dividing by q gives electric field of apoint chargeE1 =
keq1
|r − r1|3(r − r1), (1.26)
where we have given the field the same index as the charge producing it.The calculation of the gravitational field follows similarly. The result is
g1 = − Gm1
|r − r1|3(r − r1). (1.27)
In (1.26) and (1.27), P is called the field point and P1 the source point. field point andsource pointNote that in both expressions, the field position vector comes first.
If there are several point charges (or masses) producing an electric (gravita-tional) field, we simply add the contributions from each source. The principle superposition
principle explainedbehind this procedure is called the superposition principle. It is a princi-ple that “seems” intuitively obvious, but upon further reflection its validitybecomes surprising. Suppose a charge q1 produces a field E1 around itself.Now we introduce a second charge q2 which, far away and isolated from anyother charges, produced a field E2 around itself. It is not at all obvious thatonce we move these charges together, the individual fields should not change.After all, this is not what happens to human beings! We act completely dif-ferently when we are alone than when we are in the company of others. Thepresence of others drastically changes our individual behaviors. Nevertheless,charges and masses, unfettered by any social chains, retain their individualityand produce fields as if no other charges were present.
It is important to keep in mind that the superposition principle appliesonly to point sources. For example, a charged conducting sphere will notproduce the same field when another charge is introduced nearby, because thepresence of the new charge alters the charge distribution of the sphere andindeed does change the sphere’s field. However each individual point charge(electron) on the sphere, whatever location on the sphere it happens to endup in, will retain its individual electric field.14
Going back to the electric field, we can write
E = E1 + E2 + · · · + En
for n point charges q1, q2, . . . , qn (see Figure 1.16). Substituting from (1.26),with appropriate indices, we obtain
E =keq1
|r − r1|3(r − r1) +
keq2
|r − r2|3(r − r2) + · · · + keqn
|r − rn|3(r − rn)
or, using the summation symbol, we obtain14The superposition principle, which in the case of electrostatics and gravity is needed
to calculate the fields of large sources consisting of many point sources, becomes a vitalpillar upon which quantum theory is built and by which many of the strange phenomenaof quantum physics are explained.
1.3 Vectors in Different Coordinate Systems 25
position vector r, we introduce a charge q at r and calculate the force on qfrom Equation (1.24):
Fq =keq1q
|r− r1|3(r − r1).
Dividing by q gives electric field of apoint chargeE1 =
keq1
|r − r1|3(r − r1), (1.26)
where we have given the field the same index as the charge producing it.The calculation of the gravitational field follows similarly. The result is
g1 = − Gm1
|r − r1|3(r − r1). (1.27)
In (1.26) and (1.27), P is called the field point and P1 the source point. field point andsource pointNote that in both expressions, the field position vector comes first.
If there are several point charges (or masses) producing an electric (gravita-tional) field, we simply add the contributions from each source. The principle superposition
principle explainedbehind this procedure is called the superposition principle. It is a princi-ple that “seems” intuitively obvious, but upon further reflection its validitybecomes surprising. Suppose a charge q1 produces a field E1 around itself.Now we introduce a second charge q2 which, far away and isolated from anyother charges, produced a field E2 around itself. It is not at all obvious thatonce we move these charges together, the individual fields should not change.After all, this is not what happens to human beings! We act completely dif-ferently when we are alone than when we are in the company of others. Thepresence of others drastically changes our individual behaviors. Nevertheless,charges and masses, unfettered by any social chains, retain their individualityand produce fields as if no other charges were present.
It is important to keep in mind that the superposition principle appliesonly to point sources. For example, a charged conducting sphere will notproduce the same field when another charge is introduced nearby, because thepresence of the new charge alters the charge distribution of the sphere andindeed does change the sphere’s field. However each individual point charge(electron) on the sphere, whatever location on the sphere it happens to endup in, will retain its individual electric field.14
Going back to the electric field, we can write
E = E1 + E2 + · · · + En
for n point charges q1, q2, . . . , qn (see Figure 1.16). Substituting from (1.26),with appropriate indices, we obtain
E =keq1
|r − r1|3(r − r1) +
keq2
|r − r2|3(r − r2) + · · · + keqn
|r − rn|3(r − rn)
or, using the summation symbol, we obtain14The superposition principle, which in the case of electrostatics and gravity is needed
to calculate the fields of large sources consisting of many point sources, becomes a vitalpillar upon which quantum theory is built and by which many of the strange phenomenaof quantum physics are explained.
potential● equivalent to the work done by the field per unit charge (or mass)
1.3 Vectors in Different Coordinate Systems 27
Therefore, according to this concept, the force acts on an object here, becausethere exists a field right here. And force becomes a local concept. The field con-cept removes the difficulties associated with action-at-a-distance. The “agent” thattransmits the influence from the source to the object, is the field. If the Sun is stolenfrom the solar system, the Earth will not feel the absence of the Sun immediately.It will receive the information of such cosmic burglary after a certain time-lapsecorresponding to the time required for the disturbance to travel from the Sun to theEarth. We can liken such a disturbance (disappearance of the Sun) to a disturbancein the smooth water of a quiet pond (by dropping a stone into it). Clearly, the dis-turbance travels from the source (where the stone was dropped) to any other pointwith a finite speed, the speed of the water waves.
The concept of a field was actually introduced first in the context of electricityand magnetism by Michael Faraday as a means of “visualizing” electromagneticeffects to replace certain mathematical ideas for which he had little talent. However,in the hands of James Maxwell, fields were molded into a physical entity having anexistence of their own in the form of electromagnetic waves to be produced in 1887by Hertz and used in 1901 by Marconi in the development of radio.
A concept related to that of fields is potential which is closely tied to the potentialwork done by the fields on a charge (in the case of electrostatics) or a mass(in the case of gravity). It can be shown15 that the gravitational potentialΦ(r) at r, of n point masses, is given by
Φ(r) = −n!
i=1
Gmi
|r − ri|(1.28)
and that of n point charges by
Φ(r) =n!
i=1
keqi
|r − ri|. (1.29)
Note that in both cases, the potential goes to zero as r goes to infinity. Thishas to do with the choice of the location of the zero of potential, which wehave chosen to be the point at infinity in Equations (1.28) and (1.29).
Example 1.3.4. The electric charges q1, q2, q3, and q4 are located at Cartesian(a, 0, 0), (0, a, 0), (−a, 0, 0), and (0,−a, 0), respectively. We want to find the electricfield and the electrostatic potential at an arbitrary point on the z-axis. We notethat
r1 = aex, r2 = aey, r3 = −aex, r4 = −aey, r = zez,
so that
r − r1 = −aex + zez, r − r2 = −aey + zez,
r − r3 = aex + zez, r − r4 = aey + zez,
15See Chapter 14 for details.
1.3 Vectors in Different Coordinate Systems 27
Therefore, according to this concept, the force acts on an object here, becausethere exists a field right here. And force becomes a local concept. The field con-cept removes the difficulties associated with action-at-a-distance. The “agent” thattransmits the influence from the source to the object, is the field. If the Sun is stolenfrom the solar system, the Earth will not feel the absence of the Sun immediately.It will receive the information of such cosmic burglary after a certain time-lapsecorresponding to the time required for the disturbance to travel from the Sun to theEarth. We can liken such a disturbance (disappearance of the Sun) to a disturbancein the smooth water of a quiet pond (by dropping a stone into it). Clearly, the dis-turbance travels from the source (where the stone was dropped) to any other pointwith a finite speed, the speed of the water waves.
The concept of a field was actually introduced first in the context of electricityand magnetism by Michael Faraday as a means of “visualizing” electromagneticeffects to replace certain mathematical ideas for which he had little talent. However,in the hands of James Maxwell, fields were molded into a physical entity having anexistence of their own in the form of electromagnetic waves to be produced in 1887by Hertz and used in 1901 by Marconi in the development of radio.
A concept related to that of fields is potential which is closely tied to the potentialwork done by the fields on a charge (in the case of electrostatics) or a mass(in the case of gravity). It can be shown15 that the gravitational potentialΦ(r) at r, of n point masses, is given by
Φ(r) = −n!
i=1
Gmi
|r − ri|(1.28)
and that of n point charges by
Φ(r) =n!
i=1
keqi
|r − ri|. (1.29)
Note that in both cases, the potential goes to zero as r goes to infinity. Thishas to do with the choice of the location of the zero of potential, which wehave chosen to be the point at infinity in Equations (1.28) and (1.29).
Example 1.3.4. The electric charges q1, q2, q3, and q4 are located at Cartesian(a, 0, 0), (0, a, 0), (−a, 0, 0), and (0,−a, 0), respectively. We want to find the electricfield and the electrostatic potential at an arbitrary point on the z-axis. We notethat
r1 = aex, r2 = aey, r3 = −aex, r4 = −aey, r = zez,
so that
r − r1 = −aex + zez, r − r2 = −aey + zez,
r − r3 = aex + zez, r − r4 = aey + zez,
15See Chapter 14 for details.
note: the potential goes to zero as r goes to infinity
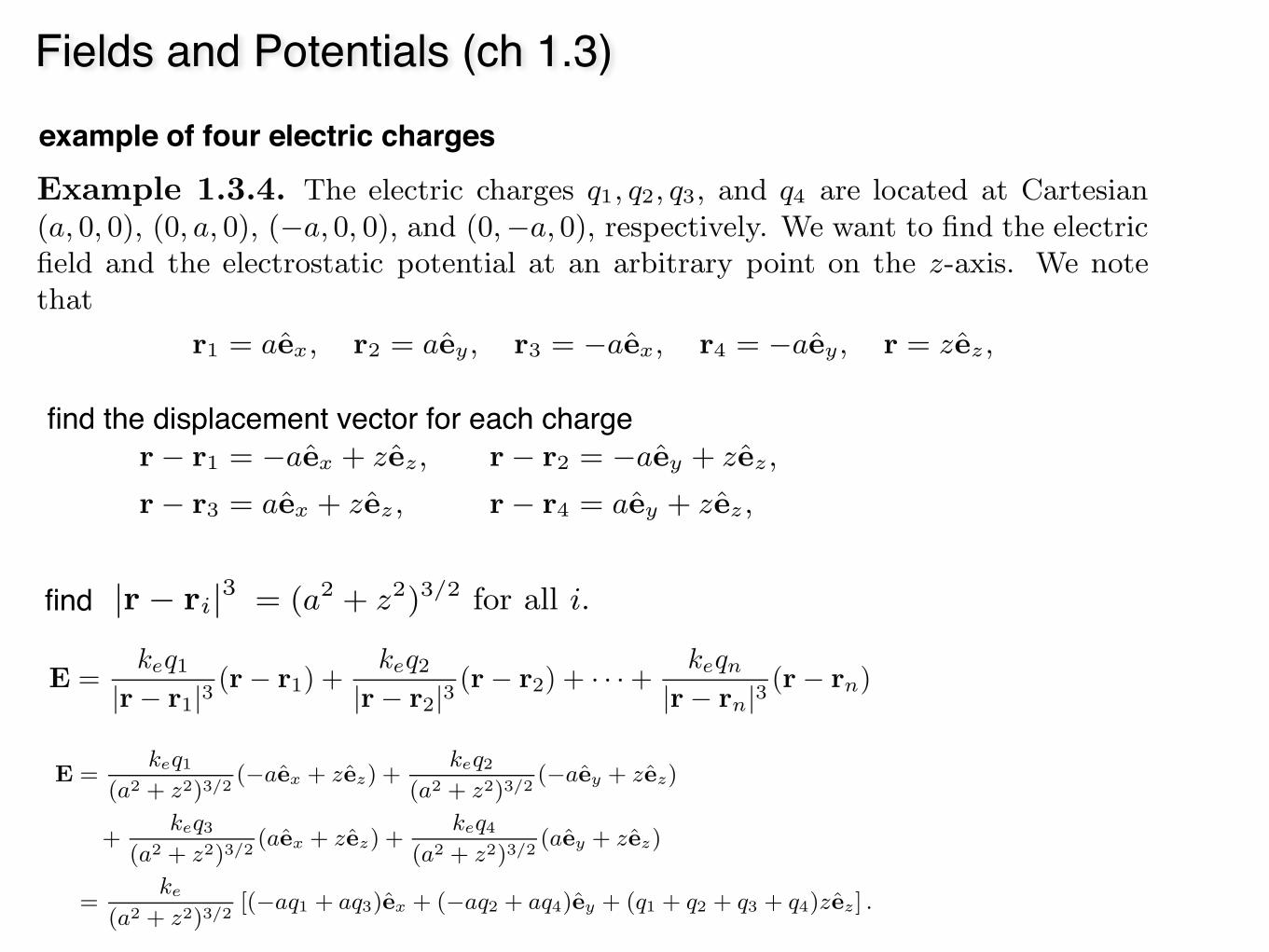
Fields and Potentials (ch 1.3)example of four electric charges
1.3 Vectors in Different Coordinate Systems 27
Therefore, according to this concept, the force acts on an object here, becausethere exists a field right here. And force becomes a local concept. The field con-cept removes the difficulties associated with action-at-a-distance. The “agent” thattransmits the influence from the source to the object, is the field. If the Sun is stolenfrom the solar system, the Earth will not feel the absence of the Sun immediately.It will receive the information of such cosmic burglary after a certain time-lapsecorresponding to the time required for the disturbance to travel from the Sun to theEarth. We can liken such a disturbance (disappearance of the Sun) to a disturbancein the smooth water of a quiet pond (by dropping a stone into it). Clearly, the dis-turbance travels from the source (where the stone was dropped) to any other pointwith a finite speed, the speed of the water waves.
The concept of a field was actually introduced first in the context of electricityand magnetism by Michael Faraday as a means of “visualizing” electromagneticeffects to replace certain mathematical ideas for which he had little talent. However,in the hands of James Maxwell, fields were molded into a physical entity having anexistence of their own in the form of electromagnetic waves to be produced in 1887by Hertz and used in 1901 by Marconi in the development of radio.
A concept related to that of fields is potential which is closely tied to the potentialwork done by the fields on a charge (in the case of electrostatics) or a mass(in the case of gravity). It can be shown15 that the gravitational potentialΦ(r) at r, of n point masses, is given by
Φ(r) = −n!
i=1
Gmi
|r − ri|(1.28)
and that of n point charges by
Φ(r) =n!
i=1
keqi
|r − ri|. (1.29)
Note that in both cases, the potential goes to zero as r goes to infinity. Thishas to do with the choice of the location of the zero of potential, which wehave chosen to be the point at infinity in Equations (1.28) and (1.29).
Example 1.3.4. The electric charges q1, q2, q3, and q4 are located at Cartesian(a, 0, 0), (0, a, 0), (−a, 0, 0), and (0,−a, 0), respectively. We want to find the electricfield and the electrostatic potential at an arbitrary point on the z-axis. We notethat
r1 = aex, r2 = aey, r3 = −aex, r4 = −aey, r = zez,
so that
r − r1 = −aex + zez, r − r2 = −aey + zez,
r − r3 = aex + zez, r − r4 = aey + zez,
15See Chapter 14 for details.
1.3 Vectors in Different Coordinate Systems 27
Therefore, according to this concept, the force acts on an object here, becausethere exists a field right here. And force becomes a local concept. The field con-cept removes the difficulties associated with action-at-a-distance. The “agent” thattransmits the influence from the source to the object, is the field. If the Sun is stolenfrom the solar system, the Earth will not feel the absence of the Sun immediately.It will receive the information of such cosmic burglary after a certain time-lapsecorresponding to the time required for the disturbance to travel from the Sun to theEarth. We can liken such a disturbance (disappearance of the Sun) to a disturbancein the smooth water of a quiet pond (by dropping a stone into it). Clearly, the dis-turbance travels from the source (where the stone was dropped) to any other pointwith a finite speed, the speed of the water waves.
The concept of a field was actually introduced first in the context of electricityand magnetism by Michael Faraday as a means of “visualizing” electromagneticeffects to replace certain mathematical ideas for which he had little talent. However,in the hands of James Maxwell, fields were molded into a physical entity having anexistence of their own in the form of electromagnetic waves to be produced in 1887by Hertz and used in 1901 by Marconi in the development of radio.
A concept related to that of fields is potential which is closely tied to the potentialwork done by the fields on a charge (in the case of electrostatics) or a mass(in the case of gravity). It can be shown15 that the gravitational potentialΦ(r) at r, of n point masses, is given by
Φ(r) = −n!
i=1
Gmi
|r − ri|(1.28)
and that of n point charges by
Φ(r) =n!
i=1
keqi
|r − ri|. (1.29)
Note that in both cases, the potential goes to zero as r goes to infinity. Thishas to do with the choice of the location of the zero of potential, which wehave chosen to be the point at infinity in Equations (1.28) and (1.29).
Example 1.3.4. The electric charges q1, q2, q3, and q4 are located at Cartesian(a, 0, 0), (0, a, 0), (−a, 0, 0), and (0,−a, 0), respectively. We want to find the electricfield and the electrostatic potential at an arbitrary point on the z-axis. We notethat
r1 = aex, r2 = aey, r3 = −aex, r4 = −aey, r = zez,
so that
r − r1 = −aex + zez, r − r2 = −aey + zez,
r − r3 = aex + zez, r − r4 = aey + zez,
15See Chapter 14 for details.
find the displacement vector for each charge
28 Coordinate Systems and Vectors
and |r − ri|3 = (a2 + z2)3/2 for all i. The electric field can now be calculated usingBox 1.3.5:
E =keq1
(a2 + z2)3/2(−aex + zez) +
keq2
(a2 + z2)3/2(−aey + zez)
+keq3
(a2 + z2)3/2(aex + zez) +
keq4
(a2 + z2)3/2(aey + zez)
=ke
(a2 + z2)3/2[(−aq1 + aq3)ex + (−aq2 + aq4)ey + (q1 + q2 + q3 + q4)zez] .
It is interesting to note that if the sum of all charges is zero, the z-component ofthe electric field vanishes at all points on the z-axis. Furthermore, if, in addition,q1 = q3 and q2 = q4, there will be no electric field at any point on the z-axis.
The potential is obtained similarly:
Φ =keq1
(a2 + z2)1/2+
keq2
(a2 + z2)1/2+
keq3
(a2 + z2)1/2+
keq4
(a2 + z2)1/2
=ke(q1 + q2 + q3 + q4)√
a2 + z2.
So, the potential is zero at all points of the z-axis, as long as the total chargeis zero. !
1.3.2 Cross Product
The unit vectors in the three coordinate systems are not only mutually perpen-dicular, but in the order in which they are given, they also form a right-handedset [see Equation (1.5)]. Therefore, we can use Equation (1.6) and write
a × b = det
⎛
⎝ex ey ez
ax ay az
bx by bz
⎞
⎠
︸ ︷︷ ︸in Cartesian CS
= det
⎛
⎝eρ eϕ ez
aρ aϕ az
bρ bϕ bz
⎞
⎠
︸ ︷︷ ︸in cylindrical CS
= det
⎛
⎝er eθ eϕ
ar aθ aϕ
br bθ bϕ
⎞
⎠
︸ ︷︷ ︸in spherical CS
(1.30)Two important prototypes of the concept of cross product are angular
momentum and torque. A particle moving with instantaneous linear mo-mentum p relative to an origin O has instantaneous angular momentumL = r × p if its instantaneous position vector with respect to O is r. InFigure 1.17 we have shown r, p, and r × p. Similarly, if the instantaneousforce on the above particle is F, then the instantaneous torque acting on it isT = r× F.
If there are more than one particle we simply add the contribution ofindividual particles. Thus, the total angular momentum L of N particles andangular
momentum andtorque asexamples of crossproducts
the total torque T acting on them are
L =N∑
k=1
rk × pk and T =N∑
k=1
rk × Fk, (1.31)
where rk is the position of the kth particle, pk its instantaneous momentum,and Fk the instantaneous force acting on it.
find
28 Coordinate Systems and Vectors
and |r − ri|3 = (a2 + z2)3/2 for all i. The electric field can now be calculated usingBox 1.3.5:
E =keq1
(a2 + z2)3/2(−aex + zez) +
keq2
(a2 + z2)3/2(−aey + zez)
+keq3
(a2 + z2)3/2(aex + zez) +
keq4
(a2 + z2)3/2(aey + zez)
=ke
(a2 + z2)3/2[(−aq1 + aq3)ex + (−aq2 + aq4)ey + (q1 + q2 + q3 + q4)zez] .
It is interesting to note that if the sum of all charges is zero, the z-component ofthe electric field vanishes at all points on the z-axis. Furthermore, if, in addition,q1 = q3 and q2 = q4, there will be no electric field at any point on the z-axis.
The potential is obtained similarly:
Φ =keq1
(a2 + z2)1/2+
keq2
(a2 + z2)1/2+
keq3
(a2 + z2)1/2+
keq4
(a2 + z2)1/2
=ke(q1 + q2 + q3 + q4)√
a2 + z2.
So, the potential is zero at all points of the z-axis, as long as the total chargeis zero. !
1.3.2 Cross Product
The unit vectors in the three coordinate systems are not only mutually perpen-dicular, but in the order in which they are given, they also form a right-handedset [see Equation (1.5)]. Therefore, we can use Equation (1.6) and write
a × b = det
⎛
⎝ex ey ez
ax ay az
bx by bz
⎞
⎠
︸ ︷︷ ︸in Cartesian CS
= det
⎛
⎝eρ eϕ ez
aρ aϕ az
bρ bϕ bz
⎞
⎠
︸ ︷︷ ︸in cylindrical CS
= det
⎛
⎝er eθ eϕ
ar aθ aϕ
br bθ bϕ
⎞
⎠
︸ ︷︷ ︸in spherical CS
(1.30)Two important prototypes of the concept of cross product are angular
momentum and torque. A particle moving with instantaneous linear mo-mentum p relative to an origin O has instantaneous angular momentumL = r × p if its instantaneous position vector with respect to O is r. InFigure 1.17 we have shown r, p, and r × p. Similarly, if the instantaneousforce on the above particle is F, then the instantaneous torque acting on it isT = r× F.
If there are more than one particle we simply add the contribution ofindividual particles. Thus, the total angular momentum L of N particles andangular
momentum andtorque asexamples of crossproducts
the total torque T acting on them are
L =N∑
k=1
rk × pk and T =N∑
k=1
rk × Fk, (1.31)
where rk is the position of the kth particle, pk its instantaneous momentum,and Fk the instantaneous force acting on it.
1.3 Vectors in Different Coordinate Systems 25
position vector r, we introduce a charge q at r and calculate the force on qfrom Equation (1.24):
Fq =keq1q
|r− r1|3(r − r1).
Dividing by q gives electric field of apoint chargeE1 =
keq1
|r − r1|3(r − r1), (1.26)
where we have given the field the same index as the charge producing it.The calculation of the gravitational field follows similarly. The result is
g1 = − Gm1
|r − r1|3(r − r1). (1.27)
In (1.26) and (1.27), P is called the field point and P1 the source point. field point andsource pointNote that in both expressions, the field position vector comes first.
If there are several point charges (or masses) producing an electric (gravita-tional) field, we simply add the contributions from each source. The principle superposition
principle explainedbehind this procedure is called the superposition principle. It is a princi-ple that “seems” intuitively obvious, but upon further reflection its validitybecomes surprising. Suppose a charge q1 produces a field E1 around itself.Now we introduce a second charge q2 which, far away and isolated from anyother charges, produced a field E2 around itself. It is not at all obvious thatonce we move these charges together, the individual fields should not change.After all, this is not what happens to human beings! We act completely dif-ferently when we are alone than when we are in the company of others. Thepresence of others drastically changes our individual behaviors. Nevertheless,charges and masses, unfettered by any social chains, retain their individualityand produce fields as if no other charges were present.
It is important to keep in mind that the superposition principle appliesonly to point sources. For example, a charged conducting sphere will notproduce the same field when another charge is introduced nearby, because thepresence of the new charge alters the charge distribution of the sphere andindeed does change the sphere’s field. However each individual point charge(electron) on the sphere, whatever location on the sphere it happens to endup in, will retain its individual electric field.14
Going back to the electric field, we can write
E = E1 + E2 + · · · + En
for n point charges q1, q2, . . . , qn (see Figure 1.16). Substituting from (1.26),with appropriate indices, we obtain
E =keq1
|r − r1|3(r − r1) +
keq2
|r − r2|3(r − r2) + · · · + keqn
|r − rn|3(r − rn)
or, using the summation symbol, we obtain14The superposition principle, which in the case of electrostatics and gravity is needed
to calculate the fields of large sources consisting of many point sources, becomes a vitalpillar upon which quantum theory is built and by which many of the strange phenomenaof quantum physics are explained.
28 Coordinate Systems and Vectors
and |r − ri|3 = (a2 + z2)3/2 for all i. The electric field can now be calculated usingBox 1.3.5:
E =keq1
(a2 + z2)3/2(−aex + zez) +
keq2
(a2 + z2)3/2(−aey + zez)
+keq3
(a2 + z2)3/2(aex + zez) +
keq4
(a2 + z2)3/2(aey + zez)
=ke
(a2 + z2)3/2[(−aq1 + aq3)ex + (−aq2 + aq4)ey + (q1 + q2 + q3 + q4)zez] .
It is interesting to note that if the sum of all charges is zero, the z-component ofthe electric field vanishes at all points on the z-axis. Furthermore, if, in addition,q1 = q3 and q2 = q4, there will be no electric field at any point on the z-axis.
The potential is obtained similarly:
Φ =keq1
(a2 + z2)1/2+
keq2
(a2 + z2)1/2+
keq3
(a2 + z2)1/2+
keq4
(a2 + z2)1/2
=ke(q1 + q2 + q3 + q4)√
a2 + z2.
So, the potential is zero at all points of the z-axis, as long as the total chargeis zero. !
1.3.2 Cross Product
The unit vectors in the three coordinate systems are not only mutually perpen-dicular, but in the order in which they are given, they also form a right-handedset [see Equation (1.5)]. Therefore, we can use Equation (1.6) and write
a × b = det
⎛
⎝ex ey ez
ax ay az
bx by bz
⎞
⎠
︸ ︷︷ ︸in Cartesian CS
= det
⎛
⎝eρ eϕ ez
aρ aϕ az
bρ bϕ bz
⎞
⎠
︸ ︷︷ ︸in cylindrical CS
= det
⎛
⎝er eθ eϕ
ar aθ aϕ
br bθ bϕ
⎞
⎠
︸ ︷︷ ︸in spherical CS
(1.30)Two important prototypes of the concept of cross product are angular
momentum and torque. A particle moving with instantaneous linear mo-mentum p relative to an origin O has instantaneous angular momentumL = r × p if its instantaneous position vector with respect to O is r. InFigure 1.17 we have shown r, p, and r × p. Similarly, if the instantaneousforce on the above particle is F, then the instantaneous torque acting on it isT = r× F.
If there are more than one particle we simply add the contribution ofindividual particles. Thus, the total angular momentum L of N particles andangular
momentum andtorque asexamples of crossproducts
the total torque T acting on them are
L =N∑
k=1
rk × pk and T =N∑
k=1
rk × Fk, (1.31)
where rk is the position of the kth particle, pk its instantaneous momentum,and Fk the instantaneous force acting on it.
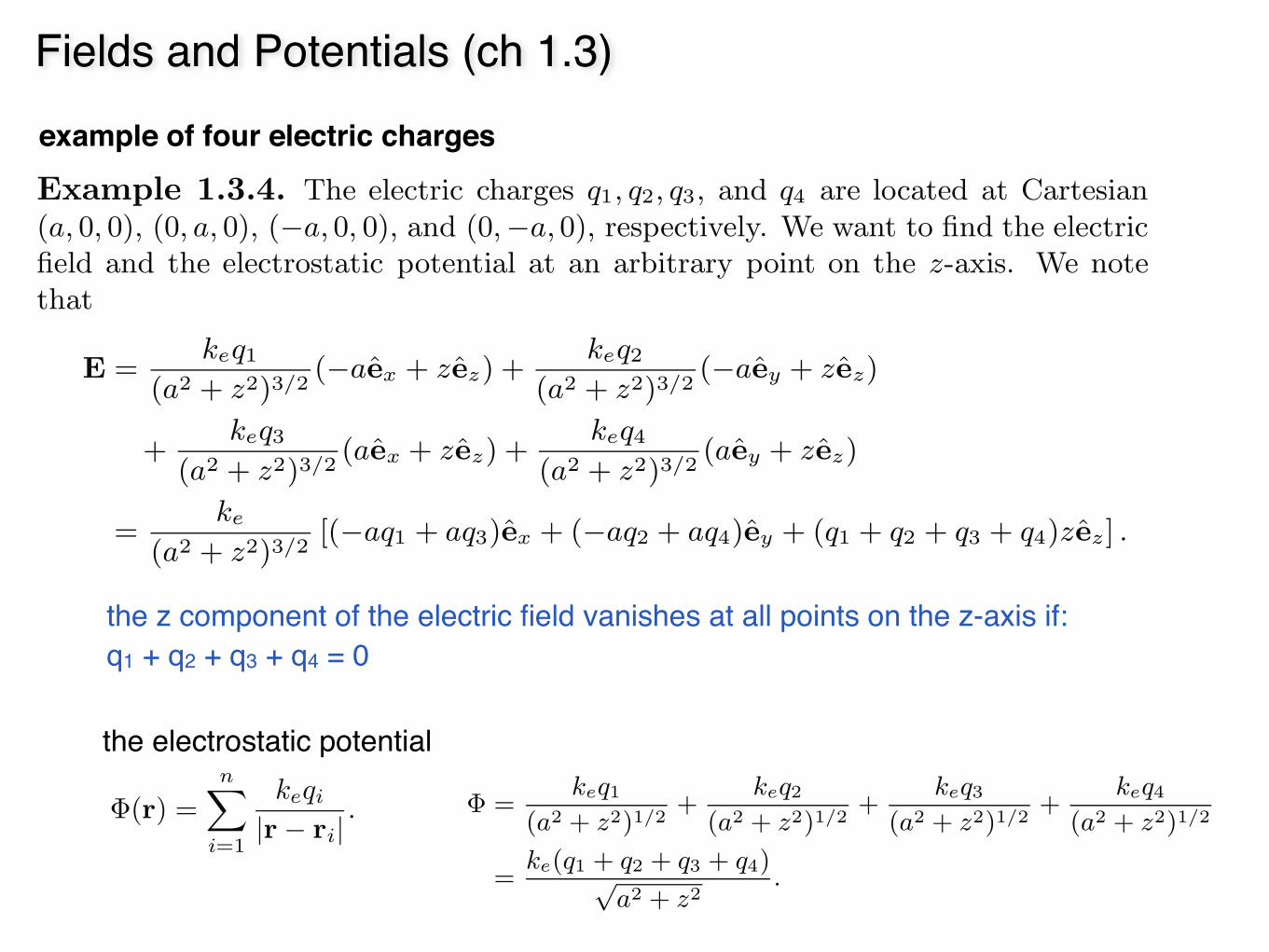
Fields and Potentials (ch 1.3)example of four electric charges
1.3 Vectors in Different Coordinate Systems 27
Therefore, according to this concept, the force acts on an object here, becausethere exists a field right here. And force becomes a local concept. The field con-cept removes the difficulties associated with action-at-a-distance. The “agent” thattransmits the influence from the source to the object, is the field. If the Sun is stolenfrom the solar system, the Earth will not feel the absence of the Sun immediately.It will receive the information of such cosmic burglary after a certain time-lapsecorresponding to the time required for the disturbance to travel from the Sun to theEarth. We can liken such a disturbance (disappearance of the Sun) to a disturbancein the smooth water of a quiet pond (by dropping a stone into it). Clearly, the dis-turbance travels from the source (where the stone was dropped) to any other pointwith a finite speed, the speed of the water waves.
The concept of a field was actually introduced first in the context of electricityand magnetism by Michael Faraday as a means of “visualizing” electromagneticeffects to replace certain mathematical ideas for which he had little talent. However,in the hands of James Maxwell, fields were molded into a physical entity having anexistence of their own in the form of electromagnetic waves to be produced in 1887by Hertz and used in 1901 by Marconi in the development of radio.
A concept related to that of fields is potential which is closely tied to the potentialwork done by the fields on a charge (in the case of electrostatics) or a mass(in the case of gravity). It can be shown15 that the gravitational potentialΦ(r) at r, of n point masses, is given by
Φ(r) = −n!
i=1
Gmi
|r − ri|(1.28)
and that of n point charges by
Φ(r) =n!
i=1
keqi
|r − ri|. (1.29)
Note that in both cases, the potential goes to zero as r goes to infinity. Thishas to do with the choice of the location of the zero of potential, which wehave chosen to be the point at infinity in Equations (1.28) and (1.29).
Example 1.3.4. The electric charges q1, q2, q3, and q4 are located at Cartesian(a, 0, 0), (0, a, 0), (−a, 0, 0), and (0,−a, 0), respectively. We want to find the electricfield and the electrostatic potential at an arbitrary point on the z-axis. We notethat
r1 = aex, r2 = aey, r3 = −aex, r4 = −aey, r = zez,
so that
r − r1 = −aex + zez, r − r2 = −aey + zez,
r − r3 = aex + zez, r − r4 = aey + zez,
15See Chapter 14 for details.
28 Coordinate Systems and Vectors
and |r − ri|3 = (a2 + z2)3/2 for all i. The electric field can now be calculated usingBox 1.3.5:
E =keq1
(a2 + z2)3/2(−aex + zez) +
keq2
(a2 + z2)3/2(−aey + zez)
+keq3
(a2 + z2)3/2(aex + zez) +
keq4
(a2 + z2)3/2(aey + zez)
=ke
(a2 + z2)3/2[(−aq1 + aq3)ex + (−aq2 + aq4)ey + (q1 + q2 + q3 + q4)zez] .
It is interesting to note that if the sum of all charges is zero, the z-component ofthe electric field vanishes at all points on the z-axis. Furthermore, if, in addition,q1 = q3 and q2 = q4, there will be no electric field at any point on the z-axis.
The potential is obtained similarly:
Φ =keq1
(a2 + z2)1/2+
keq2
(a2 + z2)1/2+
keq3
(a2 + z2)1/2+
keq4
(a2 + z2)1/2
=ke(q1 + q2 + q3 + q4)√
a2 + z2.
So, the potential is zero at all points of the z-axis, as long as the total chargeis zero. !
1.3.2 Cross Product
The unit vectors in the three coordinate systems are not only mutually perpen-dicular, but in the order in which they are given, they also form a right-handedset [see Equation (1.5)]. Therefore, we can use Equation (1.6) and write
a × b = det
⎛
⎝ex ey ez
ax ay az
bx by bz
⎞
⎠
︸ ︷︷ ︸in Cartesian CS
= det
⎛
⎝eρ eϕ ez
aρ aϕ az
bρ bϕ bz
⎞
⎠
︸ ︷︷ ︸in cylindrical CS
= det
⎛
⎝er eθ eϕ
ar aθ aϕ
br bθ bϕ
⎞
⎠
︸ ︷︷ ︸in spherical CS
(1.30)Two important prototypes of the concept of cross product are angular
momentum and torque. A particle moving with instantaneous linear mo-mentum p relative to an origin O has instantaneous angular momentumL = r × p if its instantaneous position vector with respect to O is r. InFigure 1.17 we have shown r, p, and r × p. Similarly, if the instantaneousforce on the above particle is F, then the instantaneous torque acting on it isT = r× F.
If there are more than one particle we simply add the contribution ofindividual particles. Thus, the total angular momentum L of N particles andangular
momentum andtorque asexamples of crossproducts
the total torque T acting on them are
L =N∑
k=1
rk × pk and T =N∑
k=1
rk × Fk, (1.31)
where rk is the position of the kth particle, pk its instantaneous momentum,and Fk the instantaneous force acting on it.
the z component of the electric field vanishes at all points on the z-axis if:q1 + q2 + q3 + q4 = 0
1.3 Vectors in Different Coordinate Systems 27
Therefore, according to this concept, the force acts on an object here, becausethere exists a field right here. And force becomes a local concept. The field con-cept removes the difficulties associated with action-at-a-distance. The “agent” thattransmits the influence from the source to the object, is the field. If the Sun is stolenfrom the solar system, the Earth will not feel the absence of the Sun immediately.It will receive the information of such cosmic burglary after a certain time-lapsecorresponding to the time required for the disturbance to travel from the Sun to theEarth. We can liken such a disturbance (disappearance of the Sun) to a disturbancein the smooth water of a quiet pond (by dropping a stone into it). Clearly, the dis-turbance travels from the source (where the stone was dropped) to any other pointwith a finite speed, the speed of the water waves.
The concept of a field was actually introduced first in the context of electricityand magnetism by Michael Faraday as a means of “visualizing” electromagneticeffects to replace certain mathematical ideas for which he had little talent. However,in the hands of James Maxwell, fields were molded into a physical entity having anexistence of their own in the form of electromagnetic waves to be produced in 1887by Hertz and used in 1901 by Marconi in the development of radio.
A concept related to that of fields is potential which is closely tied to the potentialwork done by the fields on a charge (in the case of electrostatics) or a mass(in the case of gravity). It can be shown15 that the gravitational potentialΦ(r) at r, of n point masses, is given by
Φ(r) = −n!
i=1
Gmi
|r − ri|(1.28)
and that of n point charges by
Φ(r) =n!
i=1
keqi
|r − ri|. (1.29)
Note that in both cases, the potential goes to zero as r goes to infinity. Thishas to do with the choice of the location of the zero of potential, which wehave chosen to be the point at infinity in Equations (1.28) and (1.29).
Example 1.3.4. The electric charges q1, q2, q3, and q4 are located at Cartesian(a, 0, 0), (0, a, 0), (−a, 0, 0), and (0,−a, 0), respectively. We want to find the electricfield and the electrostatic potential at an arbitrary point on the z-axis. We notethat
r1 = aex, r2 = aey, r3 = −aex, r4 = −aey, r = zez,
so that
r − r1 = −aex + zez, r − r2 = −aey + zez,
r − r3 = aex + zez, r − r4 = aey + zez,
15See Chapter 14 for details.
the electrostatic potential
28 Coordinate Systems and Vectors
and |r − ri|3 = (a2 + z2)3/2 for all i. The electric field can now be calculated usingBox 1.3.5:
E =keq1
(a2 + z2)3/2(−aex + zez) +
keq2
(a2 + z2)3/2(−aey + zez)
+keq3
(a2 + z2)3/2(aex + zez) +
keq4
(a2 + z2)3/2(aey + zez)
=ke
(a2 + z2)3/2[(−aq1 + aq3)ex + (−aq2 + aq4)ey + (q1 + q2 + q3 + q4)zez] .
It is interesting to note that if the sum of all charges is zero, the z-component ofthe electric field vanishes at all points on the z-axis. Furthermore, if, in addition,q1 = q3 and q2 = q4, there will be no electric field at any point on the z-axis.
The potential is obtained similarly:
Φ =keq1
(a2 + z2)1/2+
keq2
(a2 + z2)1/2+
keq3
(a2 + z2)1/2+
keq4
(a2 + z2)1/2
=ke(q1 + q2 + q3 + q4)√
a2 + z2.
So, the potential is zero at all points of the z-axis, as long as the total chargeis zero. !
1.3.2 Cross Product
The unit vectors in the three coordinate systems are not only mutually perpen-dicular, but in the order in which they are given, they also form a right-handedset [see Equation (1.5)]. Therefore, we can use Equation (1.6) and write
a × b = det
⎛
⎝ex ey ez
ax ay az
bx by bz
⎞
⎠
︸ ︷︷ ︸in Cartesian CS
= det
⎛
⎝eρ eϕ ez
aρ aϕ az
bρ bϕ bz
⎞
⎠
︸ ︷︷ ︸in cylindrical CS
= det
⎛
⎝er eθ eϕ
ar aθ aϕ
br bθ bϕ
⎞
⎠
︸ ︷︷ ︸in spherical CS
(1.30)Two important prototypes of the concept of cross product are angular
momentum and torque. A particle moving with instantaneous linear mo-mentum p relative to an origin O has instantaneous angular momentumL = r × p if its instantaneous position vector with respect to O is r. InFigure 1.17 we have shown r, p, and r × p. Similarly, if the instantaneousforce on the above particle is F, then the instantaneous torque acting on it isT = r× F.
If there are more than one particle we simply add the contribution ofindividual particles. Thus, the total angular momentum L of N particles andangular
momentum andtorque asexamples of crossproducts
the total torque T acting on them are
L =N∑
k=1
rk × pk and T =N∑
k=1
rk × Fk, (1.31)
where rk is the position of the kth particle, pk its instantaneous momentum,and Fk the instantaneous force acting on it.
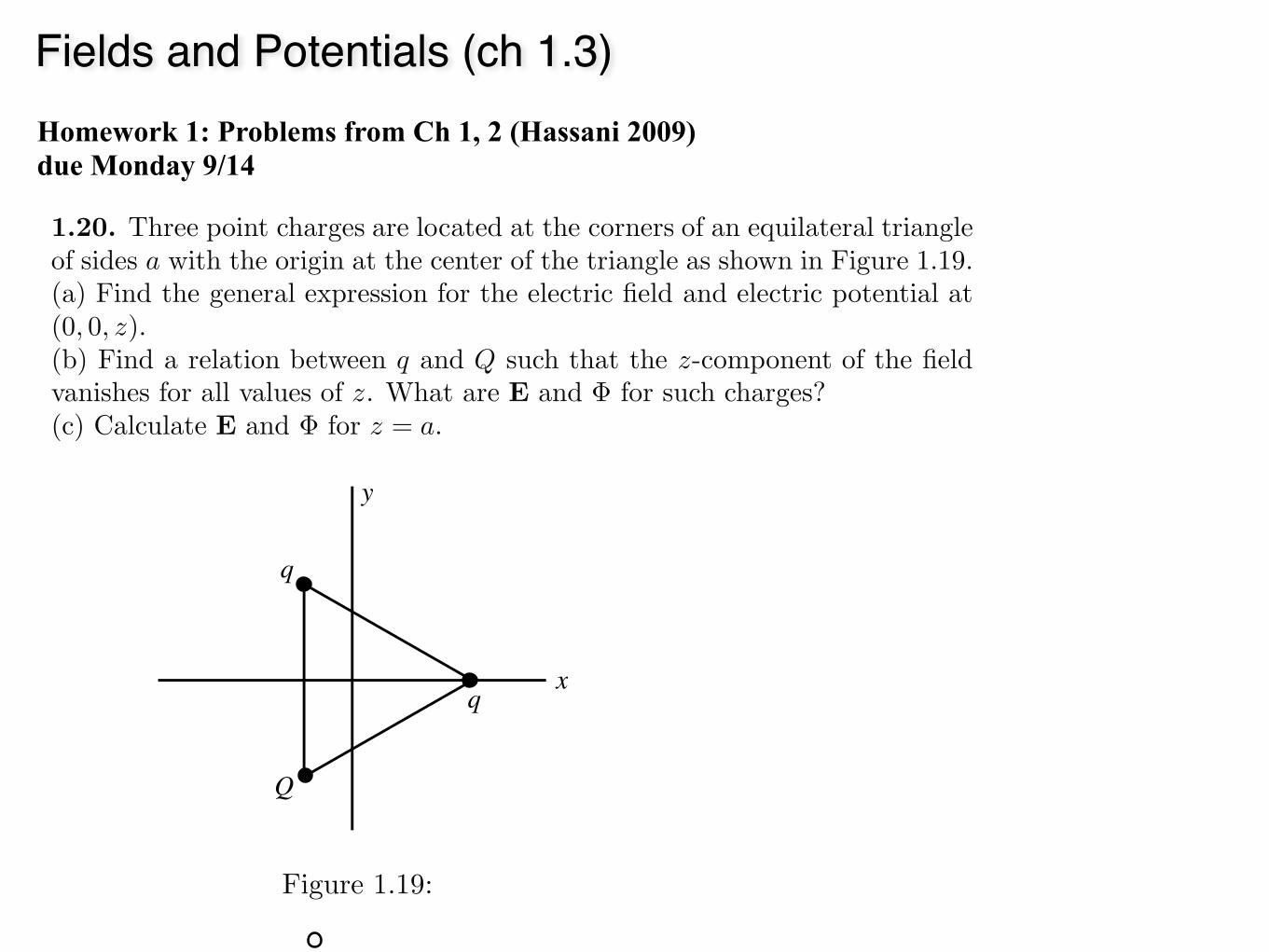
Fields and Potentials (ch 1.3)PEP 332 Mathematical Methods for Physicists
Homework 1: Problems from Ch 1, 2 (Hassani 2009)due Monday 9/14
1.5 Problems 37
1.5 Problems
1.1. Find the equation of a line that passes through the following pairs ofpoints:
(a) (1, 0, 1) and (−1, 1, 0). (b) (2, 2,−1) and (−2,−1, 1).
(c) (1, 1, 1) and (−1, 1,−1). (d) (1, 1, 1) and (−2, 2, 0).
(e) (0, 2,−1) and (3,−1, 1). (f) (0, 1, 0) and (−1, 0,−1).
1.2. Use Figure 1.4 and the interpretation of the a · b as the product of thelength of a with the projection of b along a to show that
(a + b) · c = a · c + b · c.
1.3. Take the dot product of a = b−c with itself and prove the law of cosinesby interpreting the result geometrically. Note that the three vectors form atriangle.
1.4. Find the angle between a = 2ex + 3ey + ez and b = ex − 6ey + 2ez.
1.5. Find the angle between a = 9ex + ey − 6ez and b = 4ex − 6ey + 5ez.
1.6. Show that a = ex cosα + ey sin α and b = ex cosβ + ey sin β are unitvectors in the xy-plane making angles α and β with the x-axis. Then take theirdot product and obtain a formula for cos(α−β). Now use sinx = cos(π/2−x)to find the formula for sin(α − β).
1.7. Vectors a and b are the sides of a parallelogram, c and d are its diagonals,and θ is the angle between a and b. Show that
|c|2 + |d|2 = 2(|a|2 + |b|2)
and that|c|2 − |d|2 = 4|a| |b| cos θ.
1.8. Given a, b, and c—vectors from the origin to the points A, B, and C—show that the vector (a×b) + (b× c) + (c× a) is perpendicular to the planeABC.
1.9. Show that the vectors a = 2ex − ey + ez, b = ex − 3ey − 5ez, andc = 3ex − 4ey − 4ez form the sides of a right triangle.
1.10. (a) Find the vector form of the equation of the plane defined by the threepoints P , Q, and R with coordinates (p1, p2, p3), (q1, q2, q3), and (r1, r2, r3),respectively. Hint: The position vector of a point X = (x, y, z) in the planeis perpendicular to the cross product of
−−→PQ and
−→PR.
(b) Determine an equation for the plane passing through the points (2,−1, 1),(3, 2,−1), and (−1, 3, 2).
1.11. Derive the law of sines for a triangle using vectors.
1.5 Problems 37
1.5 Problems
1.1. Find the equation of a line that passes through the following pairs ofpoints:
(a) (1, 0, 1) and (−1, 1, 0). (b) (2, 2,−1) and (−2,−1, 1).
(c) (1, 1, 1) and (−1, 1,−1). (d) (1, 1, 1) and (−2, 2, 0).
(e) (0, 2,−1) and (3,−1, 1). (f) (0, 1, 0) and (−1, 0,−1).
1.2. Use Figure 1.4 and the interpretation of the a · b as the product of thelength of a with the projection of b along a to show that
(a + b) · c = a · c + b · c.
1.3. Take the dot product of a = b−c with itself and prove the law of cosinesby interpreting the result geometrically. Note that the three vectors form atriangle.
1.4. Find the angle between a = 2ex + 3ey + ez and b = ex − 6ey + 2ez.
1.5. Find the angle between a = 9ex + ey − 6ez and b = 4ex − 6ey + 5ez.
1.6. Show that a = ex cosα + ey sin α and b = ex cosβ + ey sin β are unitvectors in the xy-plane making angles α and β with the x-axis. Then take theirdot product and obtain a formula for cos(α−β). Now use sinx = cos(π/2−x)to find the formula for sin(α − β).
1.7. Vectors a and b are the sides of a parallelogram, c and d are its diagonals,and θ is the angle between a and b. Show that
|c|2 + |d|2 = 2(|a|2 + |b|2)
and that|c|2 − |d|2 = 4|a| |b| cos θ.
1.8. Given a, b, and c—vectors from the origin to the points A, B, and C—show that the vector (a×b) + (b× c) + (c× a) is perpendicular to the planeABC.
1.9. Show that the vectors a = 2ex − ey + ez, b = ex − 3ey − 5ez, andc = 3ex − 4ey − 4ez form the sides of a right triangle.
1.10. (a) Find the vector form of the equation of the plane defined by the threepoints P , Q, and R with coordinates (p1, p2, p3), (q1, q2, q3), and (r1, r2, r3),respectively. Hint: The position vector of a point X = (x, y, z) in the planeis perpendicular to the cross product of
−−→PQ and
−→PR.
(b) Determine an equation for the plane passing through the points (2,−1, 1),(3, 2,−1), and (−1, 3, 2).
1.11. Derive the law of sines for a triangle using vectors.
38 Coordinate Systems and Vectors
1.12. Using vectors, show that the diagonals of a rhombus are orthogonal.
1.13. Show that a necessary and sufficient condition for three vectors to bein the same plane is that the dot product of one with the cross product of theother two be zero.
1.14. Show that two nonzero vectors have the same direction if and only iftheir cross product vanishes.
1.15. Show the following vector identities by writing each vector in terms ofCartesian unit vectors and showing that each component of the LHS is equalto the corresponding component of the RHS.
(a) a · (b × c) = c · (a × b) = b · (c × a).
(b) a × (b × c) = b(a · c) − c(a · b), this is called the bac cab rule.
(c) (a × b) · (c × d) = (a · c)(b · d) − (a · d)(b · c).
(d) (a × b) × (c × d) = b[a · (c × d)] − a[b · (c × d)].
(e) (a × b) × (c × d) = c[a · (b × d)] − d[a · (b × c)].
(f) (a × b) · (a × b) = |a|2|b|2 − (a · b)2.
1.16. Convert the following triplets from the given coordinate system to theother two. All angles are in radians.Cartesian: (1, 2, 1), (0, 0, 1), (1,−1, 0), (0, 1, 0), (1, 1, 1), (2, 2, 2), (0, 0, 5),(1, 1, 0), (1, 0, 0).Spherical: (2, π/3, π/4), (5, 0, π/3), (3, π/3, 3π/4), (1, 1, 0), (1, 0, 0),(5, 0,♣), (3, π,♥), (0,♠,♦).Cylindrical: (0,♣, 4), (2, π, 0), (0, 217,−18), (1, 3π/4,−2), (1, 2, 3), (1, 0, 0).
1.17. Derive the second and third relations in Equation (1.21).
1.18. Points P and P ′ have spherical coordinates (r, θ, ϕ) and (r′, θ′, ϕ′),cylindrical coordinates (ρ, ϕ, z) and (ρ′, ϕ′, z′), and Cartesian coordinates(x, y, z) and (x′, y′, z′), respectively. Write |r − r′| in all three coordinatesystems. Hint: Use Equation (1.2) with a = r − r′ and r and r′ written interms of appropriate unit vectors.
1.19. Show that Equation (1.24) is independent of where we choose the originto be. Hint: Pick a different origin O′ whose position vector relative to O isR and write the equation in terms of position vectors relative to O′ and showthat the final result is the same as in Equation (1.24).
1.20. Three point charges are located at the corners of an equilateral triangleof sides a with the origin at the center of the triangle as shown in Figure 1.19.(a) Find the general expression for the electric field and electric potential at(0, 0, z).(b) Find a relation between q and Q such that the z-component of the fieldvanishes for all values of z. What are E and Φ for such charges?(c) Calculate E and Φ for z = a.1.5 Problems 39
x
y
q
q
Q
Figure 1.19:
1.21. A point charge Q and two point charges q are located in the xy-planeat the corners of an equilateral triangle of side a as shown in Figure 1.20.(a) Find the potential and the Cartesian components of the electrostatic fieldat (0, 0, z).(b) Show that it is impossible for E to be along the z-axis.(c) Calculate E for z = a and find Q in terms of q such that Ez vanishes forthis value of z.(d) What is the value of Φ at z = a for the charges found in (c)?
1.22. Three point charges each of magnitude Q and one point charge q arelocated at the corners of a square of side 2a. Using an appropriate coordinatesystem.(a) Find the electric field and potential at point P located on the diagonalfrom Q to q (and beyond) a distance 2
√2 a from the center.
(b) Find a relation, if it exists, between q and Q such that the field vanishesat P .
1.23. A charge q is located at the spherical coordinates (a, π/4, π/3). Findthe electrostatic potential and the Cartesian components of the electrostaticfield of this charge at a point P with spherical coordinates (a, π/6, π/4). Writethe field components as numerical multiples of keq/a2, and the potential as a
x
y
q
q
Q
Figure 1.20:
PEP 332 Mathematical Methods for Physicists
Homework 1: Problems from Ch 1, 2 (Hassani 2009)due Monday 9/14
1.5 Problems 37
1.5 Problems
1.1. Find the equation of a line that passes through the following pairs ofpoints:
(a) (1, 0, 1) and (−1, 1, 0). (b) (2, 2,−1) and (−2,−1, 1).
(c) (1, 1, 1) and (−1, 1,−1). (d) (1, 1, 1) and (−2, 2, 0).
(e) (0, 2,−1) and (3,−1, 1). (f) (0, 1, 0) and (−1, 0,−1).
1.2. Use Figure 1.4 and the interpretation of the a · b as the product of thelength of a with the projection of b along a to show that
(a + b) · c = a · c + b · c.
1.3. Take the dot product of a = b−c with itself and prove the law of cosinesby interpreting the result geometrically. Note that the three vectors form atriangle.
1.4. Find the angle between a = 2ex + 3ey + ez and b = ex − 6ey + 2ez.
1.5. Find the angle between a = 9ex + ey − 6ez and b = 4ex − 6ey + 5ez.
1.6. Show that a = ex cosα + ey sin α and b = ex cosβ + ey sin β are unitvectors in the xy-plane making angles α and β with the x-axis. Then take theirdot product and obtain a formula for cos(α−β). Now use sinx = cos(π/2−x)to find the formula for sin(α − β).
1.7. Vectors a and b are the sides of a parallelogram, c and d are its diagonals,and θ is the angle between a and b. Show that
|c|2 + |d|2 = 2(|a|2 + |b|2)
and that|c|2 − |d|2 = 4|a| |b| cos θ.
1.8. Given a, b, and c—vectors from the origin to the points A, B, and C—show that the vector (a×b) + (b× c) + (c× a) is perpendicular to the planeABC.
1.9. Show that the vectors a = 2ex − ey + ez, b = ex − 3ey − 5ez, andc = 3ex − 4ey − 4ez form the sides of a right triangle.
1.10. (a) Find the vector form of the equation of the plane defined by the threepoints P , Q, and R with coordinates (p1, p2, p3), (q1, q2, q3), and (r1, r2, r3),respectively. Hint: The position vector of a point X = (x, y, z) in the planeis perpendicular to the cross product of
−−→PQ and
−→PR.
(b) Determine an equation for the plane passing through the points (2,−1, 1),(3, 2,−1), and (−1, 3, 2).
1.11. Derive the law of sines for a triangle using vectors.
1.5 Problems 37
1.5 Problems
1.1. Find the equation of a line that passes through the following pairs ofpoints:
(a) (1, 0, 1) and (−1, 1, 0). (b) (2, 2,−1) and (−2,−1, 1).
(c) (1, 1, 1) and (−1, 1,−1). (d) (1, 1, 1) and (−2, 2, 0).
(e) (0, 2,−1) and (3,−1, 1). (f) (0, 1, 0) and (−1, 0,−1).
1.2. Use Figure 1.4 and the interpretation of the a · b as the product of thelength of a with the projection of b along a to show that
(a + b) · c = a · c + b · c.
1.3. Take the dot product of a = b−c with itself and prove the law of cosinesby interpreting the result geometrically. Note that the three vectors form atriangle.
1.4. Find the angle between a = 2ex + 3ey + ez and b = ex − 6ey + 2ez.
1.5. Find the angle between a = 9ex + ey − 6ez and b = 4ex − 6ey + 5ez.
1.6. Show that a = ex cosα + ey sin α and b = ex cosβ + ey sin β are unitvectors in the xy-plane making angles α and β with the x-axis. Then take theirdot product and obtain a formula for cos(α−β). Now use sinx = cos(π/2−x)to find the formula for sin(α − β).
1.7. Vectors a and b are the sides of a parallelogram, c and d are its diagonals,and θ is the angle between a and b. Show that
|c|2 + |d|2 = 2(|a|2 + |b|2)
and that|c|2 − |d|2 = 4|a| |b| cos θ.
1.8. Given a, b, and c—vectors from the origin to the points A, B, and C—show that the vector (a×b) + (b× c) + (c× a) is perpendicular to the planeABC.
1.9. Show that the vectors a = 2ex − ey + ez, b = ex − 3ey − 5ez, andc = 3ex − 4ey − 4ez form the sides of a right triangle.
1.10. (a) Find the vector form of the equation of the plane defined by the threepoints P , Q, and R with coordinates (p1, p2, p3), (q1, q2, q3), and (r1, r2, r3),respectively. Hint: The position vector of a point X = (x, y, z) in the planeis perpendicular to the cross product of
−−→PQ and
−→PR.
(b) Determine an equation for the plane passing through the points (2,−1, 1),(3, 2,−1), and (−1, 3, 2).
1.11. Derive the law of sines for a triangle using vectors.
38 Coordinate Systems and Vectors
1.12. Using vectors, show that the diagonals of a rhombus are orthogonal.
1.13. Show that a necessary and sufficient condition for three vectors to bein the same plane is that the dot product of one with the cross product of theother two be zero.
1.14. Show that two nonzero vectors have the same direction if and only iftheir cross product vanishes.
1.15. Show the following vector identities by writing each vector in terms ofCartesian unit vectors and showing that each component of the LHS is equalto the corresponding component of the RHS.
(a) a · (b × c) = c · (a × b) = b · (c × a).
(b) a × (b × c) = b(a · c) − c(a · b), this is called the bac cab rule.
(c) (a × b) · (c × d) = (a · c)(b · d) − (a · d)(b · c).
(d) (a × b) × (c × d) = b[a · (c × d)] − a[b · (c × d)].
(e) (a × b) × (c × d) = c[a · (b × d)] − d[a · (b × c)].
(f) (a × b) · (a × b) = |a|2|b|2 − (a · b)2.
1.16. Convert the following triplets from the given coordinate system to theother two. All angles are in radians.Cartesian: (1, 2, 1), (0, 0, 1), (1,−1, 0), (0, 1, 0), (1, 1, 1), (2, 2, 2), (0, 0, 5),(1, 1, 0), (1, 0, 0).Spherical: (2, π/3, π/4), (5, 0, π/3), (3, π/3, 3π/4), (1, 1, 0), (1, 0, 0),(5, 0,♣), (3, π,♥), (0,♠,♦).Cylindrical: (0,♣, 4), (2, π, 0), (0, 217,−18), (1, 3π/4,−2), (1, 2, 3), (1, 0, 0).
1.17. Derive the second and third relations in Equation (1.21).
1.18. Points P and P ′ have spherical coordinates (r, θ, ϕ) and (r′, θ′, ϕ′),cylindrical coordinates (ρ, ϕ, z) and (ρ′, ϕ′, z′), and Cartesian coordinates(x, y, z) and (x′, y′, z′), respectively. Write |r − r′| in all three coordinatesystems. Hint: Use Equation (1.2) with a = r − r′ and r and r′ written interms of appropriate unit vectors.
1.19. Show that Equation (1.24) is independent of where we choose the originto be. Hint: Pick a different origin O′ whose position vector relative to O isR and write the equation in terms of position vectors relative to O′ and showthat the final result is the same as in Equation (1.24).
1.20. Three point charges are located at the corners of an equilateral triangleof sides a with the origin at the center of the triangle as shown in Figure 1.19.(a) Find the general expression for the electric field and electric potential at(0, 0, z).(b) Find a relation between q and Q such that the z-component of the fieldvanishes for all values of z. What are E and Φ for such charges?(c) Calculate E and Φ for z = a.1.5 Problems 39
x
y
q
q
Q
Figure 1.19:
1.21. A point charge Q and two point charges q are located in the xy-planeat the corners of an equilateral triangle of side a as shown in Figure 1.20.(a) Find the potential and the Cartesian components of the electrostatic fieldat (0, 0, z).(b) Show that it is impossible for E to be along the z-axis.(c) Calculate E for z = a and find Q in terms of q such that Ez vanishes forthis value of z.(d) What is the value of Φ at z = a for the charges found in (c)?
1.22. Three point charges each of magnitude Q and one point charge q arelocated at the corners of a square of side 2a. Using an appropriate coordinatesystem.(a) Find the electric field and potential at point P located on the diagonalfrom Q to q (and beyond) a distance 2
√2 a from the center.
(b) Find a relation, if it exists, between q and Q such that the field vanishesat P .
1.23. A charge q is located at the spherical coordinates (a, π/4, π/3). Findthe electrostatic potential and the Cartesian components of the electrostaticfield of this charge at a point P with spherical coordinates (a, π/6, π/4). Writethe field components as numerical multiples of keq/a2, and the potential as a
x
y
q
q
Q
Figure 1.20: