Oxford Octane Formula Student Report

of 188
description
Group report of a design project for a formula student car
Transcript of Oxford Octane Formula Student Report
For Engineering projects, look in the ES Course Handbook for guidance on report writing:
Yuntao ZhuLincoln CollegeConclusion
University of OxfordDepartment of Engineering ScienceThird Year Engineering Design Project 2014/2015
Design of a Car for the Formula Student Competition
Team Oxford Octane
Alastair Adams-Cairns (St. Edmund Hall)Robert Bainbridge (St. Catherines College)Justin Hubbard (Hertford College)Edmund Moss (Somerville College)Yuntao Zhu (Lincoln CollegeTalbot Kingsbury (Keble College)
Abstract
Still to be written
Table of Contents1Introduction12 Engine22.1 Introduction22.1.1 Objectives & Specification22.2 Engine Selection42.2.1 FSAE Rules42.2.2 Available Engines42.2.3 Decision52.3 Engine Modelling62.4 Analysis and Optimisation82.4.1 Air Intake82.4.2 Throttle92.4.3 Venturi102.4.4 Plenum132.4.5 Forced Induction and Natural Aspiration152.4.6 Cylinders172.4.7 Valves192.4.8 Fuel Injection222.4.9 Fuel232.4.10 Air/Fuel and Equivalence Ratio242.4.11 Fuel Consumption252.4.12 Fuel Tank272.5 Fine Tuning282.6 Conclusion302.7 References313Thermal Management323.1Introduction323.2Basics of the cooling system323.3 Cooling system components333.3.1 Coolant pump selection343.3.2Cooling fan selection353.4Radiator analysis353.5Conclusion383.6References394. Aerodynamics404.1Introduction404.2Material selection analysis for the aerodynamic package404.2.1Introduction404.2.2Material properties414.2.3 Manufacture414.2.4 Multi-criteria decision analysis434.3 Undertray444.3.1 Introduction444.3.2 Theory444.3.3 Computational fluid dynamics454.3.4 Diffuser angle analysis484.3.5 Ground clearance analysis504.3.6 Conclusion514.4 Wings514.4.1 Introduction524.4.2 Top speed performance524.4.3 Aerofoil selection544.4.4 Rear wing564.4.5 Front wing564.4.6 Cornering performance574.4.7 Conclusion594.5 The complete aerodynamic package604.6Conclusion614.7References615Chassis and Packaging625.1Introduction625.2Design Procedure635.2.1Decision Making (Space frame vs. Monocoque)635.2.2 Regulations and Dimension Specifications645.3 Materials675.3.1Comparison of Materials675.3.2 Composite Materials685.3.3Material Selection745.3.4Composite Sandwich Structures775.3.5Methods for Manufacturing Composite Materials795.4Analysis of the Chassis815.4.1Finite Element Analysis (FEA)815.4.2Impact Testing the Chassis825.4.3Torsion Test835.4.4Rollover stability test845.5Packaging855.6Conclusion885.7References906Suspension, Steering, Tyres and Brakes916.1Introduction916.2Suspension916.2.1Suspension type916.2.2Setting Suspension Geometry926.2.3Dynamic Suspension Simulation946.2.4Actuation methods956.2.6Spring-Damper Calculations966.2.7Suspension System Fabrication986.2.8Anti-roll bar996.3Steering996.3.1Ackerman Steering Principle1006.3.2Steering Properties1016.3.3Upright Fabrication1026.4Tyres1046.4.1Tyre Options1046.4.2Tyre Size1056.4.3Rim Selection1066.4.4Tyre Theory1076.4.5Tyre Simulation1093.4.6Tyre Friction Ellipse1116.5Brakes1126.5.1Brake Discs1136.5.2Brake Callipers1146.5.3Pedal Box1156.5.4Braking Force Calculations1166.5.5Heat Simulation1186.6Conclusion1207. Electrical and Control System (Yuntao Zhu)1217.1 Introduction1217.2 Engine Control Unit (ECU)1217.2.1 Introduction1217.2.2 ECU1227.2.3 Control of Air/Fuel ratio1237.2.4 Ignition timing control1257.2.5 Cooling control1257.2.6 Electronic throttle control (ETC)1267.2.7 Sensors1277.3 Braking Control System (Stability Control)1297.3.1 Electronic Stability Program (ESP)1297.3.2 Anti-lock Braking System1317.3.3 Traction Control System (TCS)1357.4 Battery System1357.4.1 Introduction1357.4.2 Battery1367.4.3 Battery Management1377.4.5 Alternator1397.4.6 Shutdown system1407.4.7 Brake Light1417.4.8 Overall system circuit diagram1417.5 Conclusion1427.6 Reference1448. Drivetrain1458.1. Introduction1458.2. Gearbox1458.2.1 Gearbox Comparison1458.2.3 CVT Selection1488.2.4 CVT Guard1498.3. Differential1508.3.1 Necessity and dual CVTs1508.3.2 Differential type comparison1508.3.3 Limited Slip Differential Selection1518.4. Chain Drives1518.4.1. Chain drive, belt drive and driveshaft1518.4.2 Ratio calculation1528.4.3 Chain and sprocket selection1538.5. Half Shafts and Constant Velocity Joints1548.5.1. Half shaft material selection1548.5.2. Half shaft sizing1558.5.3 CV Joints1568.6 Conclusion1568.7 References1579. Simulation1589.1. Introduction1589.2. Software1599.3. Driving Force Simulation1599.3.1. Overview1599.3.2. Drivetrain1599.3.3. CVT1609.3.4. Engine and Clutch1619.4. Driver1629.4.1. Requirements1629.4.2. Velocity look up1629.4.3. Braking point calculator1639.4.4. Velocity Control1659.5. Brakes1659.5.1. Brakes subsystem1659.6. Drag and rolling resistance1669.6.1. Drag1669.6.2. Rolling resistance1669.7. Rotational inertia1669.7.1. Introduction1669.7.2. Effective masses1679.8. Results1689.8.1. Acceleration event1689.8.2. Autocross event (single lap)1699.8.3. Endurance event1709.9. Conclusion1709.10. References17110. Project Management and Finance17210.1. Introduction17210.2. Project planning17210.3. Finance17210.4. Conclusion17310.5. Appendices17411Conclusion176
1IntroductionOxford Octanes 3rd Year Project is a design project based on the Formula Student competition run by SAE International, previously known as the Society of Automotive Engineers, where the aim is to produce a Formula-style racing car to compete in an event run annually. It is a globally recognised competition with 12 different events running in different regions across the globe. Each student team designs, builds and tests a prototype based on a series of rules, which ensure on-track safety and encourage clever problem solving. The points for the Formula Student Event, obtained from the 2015 SAE Rules are outlined in Table 1.1. However, this project was set out as a design project, with no final construction necessary.Table 1.1The scoring system for Formula Student competition
Static EventsTechnical InspectionNo Points
Design150
Presentation100
Cost and Manufacturing Analysis75
Dynamic EventsAcceleration75
Skid Pad50
Autocross150
Efficiency100
Endurance300
Total1000
The group was subdivided into more specific roles to try and give the chance for more in depth research into how to optimise the performance of the car. This resulted with: Alastair taking control of the engine design, Robert with the aerodynamics and thermal management design, Justin with the chassis and packaging design, Edmund with the suspension, steering, tyres and brakes design, Yuntao with the electrical and control systems design and Talbot with the transmission and simulation design along with the financial aspects of the project. Once everyone established what their roles entailed, a decision was made about the key aim of the group. It was decided that the car would consist of an internal combustion engine (ICE) only, without a hybrid or electric drive system. A theoretical budget of 40 000 was set to construct a theoretical model of the car, with the main aim of the team being for it to compete with the top end competitors at the 2015 Formula Student event.Justin HubbardHertford CollegeIntroduction
642 Engine2.1 IntroductionThe Formula Student car will be designed to partake in both static and dynamic events in order to gain points and compete with other teams whilst keeping within the constraints of the rules set out by FSAE (Formula Society of Automotive Engineers). [1] The sole source of power to the car is an internal combustion engine so the design is crucial to the success of the car on race day. In this chapter, the selection, modelling and optimisation of the engine will be covered as well as the fuel to power the engine. The engine of choice is a Honda CBR600RR from a motorcycle. 2.1.1 Objectives & SpecificationIn order to create a useful method for selecting the engine, it is important to specify which parameters are the most important for the engine. The main objective will be maximising power available to the car; the reason for this decision will be addressed below. Whilst there are points available for efficiency of the car, the dynamic event with most points available is the endurance event where a score is calculated based on the time taken for the car to complete the event. As per the FSAE rules [1], three times the number of points available for efficiency are available for the endurance event so maximising the power of the engine will be the number one priority. There is also an acceleration event for which points are available. An engine with high torque is desirable for this event as torque is a better measure for determining the acceleration of a car than power, so selecting an engine with a high torque output as well as high power output will be a priority.Another objective will be to minimise weight. As described above, performance of the car is very important and adding any unnecessary weight to the car will only reduce its performance.As the efficiency of the car carries with it some points, efficiency will be another priority when it comes to modelling and optimisation, although it is rather less important than engine power output.Other important considerations are cost, availability and packaging. The project has a budget of 40,000 and large though that might seem, most of it will be spent on the design and manufacture of a carbon monocoque chassis, so keeping the cost of the engine down will be important as this is a key component of the car. The availability of the engine will have to be taken into account too; it will need to be sourced within a few weeks so that modifications can be made to it. This means any rare engines are out of the question. Packaging is a factor that is sometimes overlooked. Fitting the engine and transmission behind the driver as dictated by the FSAE rules [1] will be a challenge as well so a bulky engine may not fit.Taking the above into account and looking at cars from previous years that have performed well, the following engine specification should be adhered to without fail: Minimum Peak Power of no less than 65 hp (48.5 kW) Minimum Torque of no less than 50 Nm Weight of no more than 60 kg Cost of no more than 2000Efficiency will be considered in the design of the engine along with availability and packaging considerations but these are much more difficult to specify so no figures will be assigned to them in this specification; however, discretion will be observed when selecting a suitable engine.
2.2 Engine Selection2.2.1 FSAE RulesThe FSAE rules [1] aim to ensure that every team will be able to compete together with maximum flexibility of design whilst at the same time trying to keep the competition fair. [1] In particular, the engine selected must comply with the rules in order for the car to be allowed to enter the Formula Student competition. The set of rules is extensive but a summary of the key engine rules is discussed below. The maximum allowable engine displacement is 610 cc. Engines may be naturally aspirated, turbocharged, supercharged or a combination of the two. All engines must use a restrictor plate in the intake system with a diameter of 20 mm. The location of the restrictor plate varies depending on whether the engine is naturally aspirated or whether it makes use of forced induction. Engines must be four-stroke and can make use of carburetion, low pressure injection (port injection) or high pressure injection (direct injection). Fuel additives are prohibited and the maximum allowable sound level from the engine is 110 dB when racing and 100 dB when idling. [1] The above rules eliminate large, high power engines, such as those you might normally see in road or track cars, so attention will be focussed elsewhere.2.2.2 Available EnginesShort of manufacturing an engine entirely from scratch, something rather complicated and too difficult to achieve within the time constraints of this project, the maximum allowable engine displacement of 610 cc limits the available engines largely to those from motorcycles or similar small vehicles. In order to keep within the specification, an engine would need to be purchased in a used condition as new ones are too expensive.Looking at previous competitors selections, the two types of engines used come from either motorcycles or snowmobiles, excluding hybrid and electric power units. This is because more often than not, these engines tend to be in the 450-600 cc range, which is ideal for meeting the rules. One such snowmobile engine is the engine from a Yamaha Phazer M-TX which is 499 cc and produces 80 hp at 12,000 rpm. [2] After further research, it was decided that snowmobile engines would not be considered for a number of reasons. First, whilst some have a displacement within the desired range, many of the engines are two-stroke and most of the four-stroke engines tend to be a lot larger than 610 cc. [3] Furthermore, whilst researching the engines online, the technical specifications are rather hard to come by, perhaps due to the fact that fewer units are produced than motorcycle engines. Not only are snowmobile engines difficult to research but second-hand snowmobile engines for sale are more difficult to source than their motorcycle counterparts. Although a big advantage of snowmobile engines is that they often come with a Continuously Variable Transmission (CVT), which we shall be using as will be explained in a later chapter of this project, this is not enough to outweigh the disadvantages. This leaves the decision of which motorcycle engine to choose. The Honda CBR600RR is the most popular choice amongst Formula Student teams, but a comparison of other similar engines is worthwhile. Table (1) below is a tabulated comparison of the Honda CBR600RR [4], the Suzuki GSX-R600 [5] and the Yamaha WR 450F [6]:Table (1) Comparison of Honda CBR600RR, Suzuki GSX-R600 and Yamaha WR 450F
Engine
Honda CBR600RRSuzuki GSX-R600Yamaha WR 450F
Displacement (cc)599599449
Arrangement4 Cylinder Inline4 Cylinder InlineSingle Cylinder
Bore x Stroke (mm)67 x 42.567 x 42.595 x 63.4
Peak Power (hp)118.1 @ 13,500 rpm103 @ 13,550 rpm58 @ 9,000 rpm
Peak Torque (Nm)66 @ 11,250 rpm59.1 @ 11,140 rpm49 @ 7,000 rpm
2.2.3 DecisionThe single cylinder engine was included in Table (1) above because single cylinder engines provide the greatest thermal efficiency per unit displacement. [7] However, whilst there are a few engines available with a displacement of around 450 cc, the next largest engines have a displacement larger than the maximum allowable 610 cc. The Yamaha WR 450F simply does not produce enough power for the outlined specification. The Honda and Suzuki engines have the same displacement but the Honda produces more power and more torque than the Suzuki so this will be the engine used in the project for modelling and optimisation. Furthermore, used Honda CBR600RR engines can be sourced very easily from the online marketplace, ebay, for well under 2000. [8]
Figure 2.1 Honda CBR600RR Engine [9]2.3 Engine ModellingThere are two main reasons for engine modelling. The first reason is that by modelling the engine, we can predict performance without having to carry out actual tests. Testing a full scale model engine would be costly as well as time-consuming and out of the question for this project. The second reason for modelling the engine is that we can determine engine parameters that in practice would be nearly impossible to measure. Furthermore, in the case of an engine, many of the processes are too complicated to be modelled conventionally. After spending some time experimenting with a single cylinder model of an engine on a free version of the software, Lotus Engine Simulation software was acquired from Lotus Engineering Software. [10] The Lotus Engine Simulation software is very powerful and with the use of the handbook, it was possible to begin analysing the engine of choice. [11]A model of a stock Honda CBR600RR was constructed with the addition of a 20 mm restrictor in the intake system. A schematic of the engine taken from the software can be seen below in Figure 2.2:
Figure 2.2 Schematic of Honda CBR600RR in Lotus Engine Simulation SoftwareAfter running a simulation with the engine as above, including the 20 mm restrictor, initially with a few data points, the software was able to give figures for power, torque, brake specific fuel consumption (BSFC) and brake mean effective pressure (BMEP), along with many other useful parameters at different engine speeds. The stock engine with restrictor produced a peak power of 50.4 hp @ 11,400 rpm and a peak torque of 48.9 Nm @ 3,600 rpm. These figures were an early indication that there was much work to be done to the engine to meet the specification of a minimum peak power of 65 hp and a minimum peak torque of 50 Nm, whilst also raising questions about whether to run the engine at peak power or peak torque, bearing in mind that a CVT will be used. A summary of the performance of this engine simulation can be seen below in Figure 2.3 with Power, Torque, BSFC and BMEP vs engine rpm:
Figure 2.3 Power, Torque, BSFC and BMEP vs Engine rpm for stock engine with restrictor
2.4 Analysis and Optimisation2.4.1 Air IntakeThe first component of the intake system is the air intake. The engine draws in stationary air at atmospheric pressure through the air intake due to a pressure difference. We can analyse the flow of air by assuming pipe flow initially in an infinite cross-section before a sudden decrease in cross-section (to a diameter of 40 mm which is the stock size for the Honda CBR600RR). [9] The air intake can be modelled as a sudden change in cross-sectional area which will result in head loss. The equation for head loss is shown below in Equation (1): (1) [12]where KL is an empirical loss coefficient. For the case described above, the highest value of loss coefficient is 0.5 and this occurs when the intake is sharp-edged. We can minimise the loss coefficient by rounding the edges of the intake to achieve a loss coefficient of 0.04 which is small enough to neglect. A round-edged inlet, as described above, is known as a bell mouth [13] and this minimises losses; this will be the shape of the air intake which will be used. A diagram of a sharp-edged and round-edged or bell mouth inlet can be seen below in Figure 2.4:
Figure 2.4 Comparison of rounded and sharp-edged inlets [12]2.4.2 ThrottleThe next component of the intake system is the throttle. There are a number of throttle valve types available but the two most popular types will be considered here. The first type of valve is a butterfly valve which consists of a circular disc on a spindle, housed in pipework. When the throttle valve is closed, the disc is perpendicular to the direction of flow and blocks the flow through the pipe. When the throttle valve is fully open, the disc is orientated parallel to the direction of flow. An example of a butterfly throttle can be seen below in Figure 2.5:
Figure 2.5 Partially open butterfly throttle [14]Furthermore, there are losses associated with a butterfly valve; even when open, a butterfly valve reduces the effective cross-sectional area at the throttle and separation may occur at any of its edges. [7] An example of how a butterfly valve disturbs the flow can be seen in Figure 2.6 below:
Figure 2.6 Streamlines showing butterfly valve impeding flow when partially open (left) and fully open (right) [16]
The second type of throttle which will be considered is a barrel valve. A barrel valve consists of a barrel shaped object housed within pipework. When the barrel valve is closed, it restricts the flow through the pipe entirely. When the barrel valve is fully open, it does not impede the flow through the pipe in any way, giving it a great advantage over the butterfly valve. A barrel valve will therefore be used to minimise losses. An example of a barrel valve fully open, with no obstruction to flow can be seen below in Figure 2.7:
Figure 2.7 Fully open barrel valve [15]
2.4.3 VenturiThe next component of the intake system is the restrictor of diameter 20 mm, as specified by the FSAE Rules. [1] As a restrictor plate of diameter 20 mm inserted into a pipe of a larger diameter (in this case 40 mm), also called an orifice plate, would result in large losses from separation, a more efficient method is needed. A simple but effective way to implement a restrictor is to weld together two pipes, connected in series between the throttle and the plenum (the next component of the intake system). The first pipe takes the form of a contractor while the second pipe is a diffuser. Where the two pipes meet, their diameters will be 20 mm, creating a venturi effect. The design of the contractor is less important than that of the diffuser because a contractor will not cause any flow separation. Although there will be no separation in the contractor, there will still be losses; the equation for head loss is the same as Equation (1), but now we have an expression for KL as per Equation (2) below: (2) [17]Figure 2.8 below shows the parameters for Equation (2) above. Taking L = 100 mm, a number which does not result in too sudden a contraction, [18] we get a value of KL = 0.06 which is similar to the value for the bell mouth air inlet and is small enough to be neglected. A schematic for the contractor is shown below in Figure 2.8 and Figure 2.9:
Figure 2.8 (Left) Schematic diagram of setup described above with parameters corresponding to Equation (2) [19]
Figure 2.9 (Right) Schematic of contractor pipe taken from software modelThe rate at which the diameter of the diffuser pipe increases requires careful attention during its design. In order to avoid separation, the angle between a line on the inside surface of the pipe and an imaginary line running parallel to the pipe, of radius equal to the narrower end of the pipe from the centreline, should be 5-10. [18] A value between the two, of 8 will be used. The loss coefficient, KL, has a different expression as shown below in Equation (3):(3) [17]Figure 2.10 below shows the parameters for Equation (3) above. Taking L = 250 mm, we find that D2 = 90 mm and KL = 0.036 which is again small enough to neglect. There will also be no separation in the diffuser. A schematic of the diffuser can be seen below in Figure 2.10 and Figure 2.11:
Figure 2.10 (Left) Schematic diagram of setup described above with parameters corresponding to Equation (3) [19]
Figure 2.11 (Right) Schematic of diffuser pipe taken from software model
By modelling the engine with and without the inclusion of the restrictor, it is clear that the restrictor limits the power by a considerable amount. A comparison of peak power output from the stock engine without the restrictor and the engine with the designed intake system and restrictor can be seen below in Figure 2.12:
Figure 2.12 Graph showing peak power output from engine with (designed intake) and without (stock) 20 mm restrictor.
As can be seen in Figure 2.12 above, the value for peak power without the restrictor agrees well with the value given in Table (1) for the Honda CBR600RR engine. This agreement is reassuring as it means that engine modelling software is producing realistic values that can be used elsewhere in the project. Moreover, Figure 2.12 above also makes it clear by how much the restrictor decreases the peak power of the engine. Further optimisation is necessary to meet the specification. Whereas without the restrictor, the peak power is achieved at maximum rpm, the addition of the restrictor results in peak power being achieved at just over 11,000 rpm. This behaviour will be discussed later in the chapter.2.4.4 PlenumThe next component of the intake system is the plenum. The plenum, combined with pipes at its exit leading to the cylinders (called runners), completes the intake system. A plenum is a pressurised chamber containing a fluid (in this case air) at higher pressure than its surroundings. [20] In the case of an engine, which has an irregular demand from the cylinders, the plenum works to even the distribution of pressure. In the case of the exhaust, a plenum has the added function of acting as a silencer. The size of the plenum will have an effect on the power output of the engine but the relationship between the two is not linear. Within a reasonable range, an increase in plenum size will increase the power output. However, outside this range, any further increase in size will have little effect on power output. Furthermore, a large plenum will have a negative effect on throttle response, as a large plenum will take a longer time to fill than a smaller one. In addition, the pressure inside a larger plenum will decrease resulting in decreased volumetric efficiency, which is a measure of the effectiveness of the induction and exhaust processes. [23] As well as power output, a very important consideration regarding plenum sizing is that of packaging. A large plenum could take up a volume similar to that of the engine itself, meaning that a balance between power output and size will be needed.By making use of the Parametric/ Optimiser Tool in the software, it is possible to determine how power output changes with plenum size. Plenum volumes ranging from 1-12 L were chosen, with increments of 1 L between each, for use in the simulation. After running a number of simulations with plenum sizes of less than 5 L, it was clear that power output drops considerably so any smaller sizes than this were not considered for use with the engine. The results of the simulation are shown below in Figure 2.13 and Figure 2.14:
Figure 2.13 Engine output power vs engine speed for different plenum sizes
Figure 2.14 As Figure 2.13 above with focus on the peak power outputIn Figure 2.13 and Figure 2.14 above, the red line displays the power output vs engine speed for a plenum volume of 10 L. When running simulations prior to the use of the Parametric/ Optimiser Tool, a plenum volume of 10 L appeared to yield the highest peak power output for the engine, so this volume was used for the software baseline score. However, it is clear from Figure 2.14 that there are plenum sizes which produce peak power output values above and below that of a 10 L plenum. An important point to note is that the peak power output in each case is achieved at around 11,500 rpm and this peak is more prominent than that shown in Figure 2.12. The results displayed in Figure 2.14 are presented in a more useful format below, in Figure 2.15:
Figure 2.15 Peak power output vs plenum volume @ 11,500 rpmIt can be seen in Figure 2.15 above that the peak power output is achieved with a plenum volume of 7 L. Below this volume, the power output decreases rapidly and above it, there is a decreasing oscillatory behaviour. Taking everything into account, a plenum volume of 7 L will be used to obtain the maximum power possible; the size of the plenum will not cause a problem and can be accommodated.2.4.5 Forced Induction and Natural AspirationThe final decision with regard to the intake system is whether to make use of forced induction or whether to have the engine naturally aspirated. We shall analyse both cases below.Forced induction works on a simple principle whereby a greater mass of air is forced into the cylinders via some sort of compressor than would otherwise be drawn into the cylinders without a compressor (natural aspiration) and this results in a charge (air and fuel mixture in a cylinder) with more potential energy for combustion. One useful application of this is in propeller driven aircraft that would otherwise lose power at altitude due to a decrease in atmospheric pressure whereas the forced induction largely negates this. Forced induction can also be very useful for cars with internal combustion engines as is the case here. There are two common types of compressors: superchargers and turbochargers. The former are driven directly from the crankshaft of the engine via a belt which means there is no delayed response, otherwise known as lag. The downside to superchargers is that they are less efficient than turbochargers. Turbochargers work on the same principle as superchargers but are driven by exhaust gases in the exhaust manifold. Turbochargers suffer from lag because there is a delay between throttle depression and the compressor spooling up from the increased exhaust gas mass flow rate. As the engine will be running at a constant rpm, the reasons for which will be explained in the CVT section later in the report, it is not a problem that turbochargers suffer from lag. In addition, turbochargers tend to be more efficient than superchargers and also offer greater maximum boost pressure. Therefore, the proposal of using a supercharger can be discarded in favour of analysing turbochargers. A schematic diagram of a turbocharger implementation is shown below in Figure 2.16:
Figure 2.16 Schematic diagram of turbocharger implementation in an engine [21]
The limiting factor on the maximum mass flow rate of air being drawn into the engine is given by conditions of choked flow. In other words, the maximum mass flow rate of air drawn into the engine is achieved when the flow through the venturi reaches a Mach number of M = 1. [7] [18] If this choked condition is reached without the use of a turbocharger, then the addition of one will simply add weight to the engine and have no effect on the peak power produced. Before analysing the turbocharger any further, it is important to check if the choked condition has already been reached. It is possible to work out the mass flow rate of air through the venturi under choked conditions (M = 1) using Equation (4) below: (4) [22]Where cross-sectional area of venturi A = 3.14e-4 m2, pressure p = 1e5 Pa, heat capacity ratio = 1.4, gas constant R = 287 J/kg/K and temperature T = 293 K. Solving Equation (4) above gives a mass flow rate of air, = 0.0927 kg/s under choked conditions. Using this value for mass flow rate along with Equation (5) below, it is possible to determine the engine rpm at which choked conditions will occur:(5) [23]Where N is engine rpm, swept volume = 0.599e-3 m3, volumetric efficiency = 0.88, density of air = 1.90 kg/m3 [24] and is as above. Solving Equation (5) above gives a value of N = 11,300 rpm for choked conditions. This value agrees with the behaviour seen in Figure 2.13. Figure 2.13 shows that peak power is reached at a similar engine rpm as calculated above using Equation (5); the flow is choked at this rpm and running the engine at a greater rpm than this will yield no benefit. It is for this reason that there is no benefit to be obtained by using a turbocharger. Therefore, the engine will be naturally aspirated and will run at choked conditions to produce maximum possible power output.2.4.6 CylindersThe key component of any engine is its cylinders, where the useful power is produced. The Honda CBR600RR engine chosen has four cylinders in line with one another. In order to try and smooth the torque at the crankshaft resulting from combustion and to help balance the engine, the two outer cylinders move out of phase with the inner two cylinders. The bore (or diameter) of the cylinders is 67 mm while the stroke (the distance each piston moves within a cylinder) is 42.5 mm. The bore/stroke ratio is a useful parameter when considering the design of an engine. The bore/stroke ratio above is 1.576 which is typical of an engine designed for racing; the Renault engine for the 2014 Formula 1 season, for example, has a bore/stroke ratio of 1.509. [25] The reason for the comparatively high bore/stroke ratio is to reduce the frictional losses in the cylinders. The frictional losses increase with increasing piston speed, and thus engine rpm, as can be seen in Equation (6) below:(6) [23]With frictional mean effective pressure FMEP (bar) and engine rpm N. It is possible to achieve a given engine displacement by varying either bore, stroke, or a combination of the two; by increasing the bore size and keeping the stroke small, even at high engine rpm, the piston speed will be lower and thus frictional losses will also be reduced. Solving Equation (6) above with N = 11,500 gives FMEP = 9.31 bar. Considering the BMEP = 12.39 bar at this speed (taken from the engine simulation), the engine is losing almost as much power to friction as it usefully produces. It is for this reason that it is important to keep the piston speed low. Having a large bore has the added benefit that there is a larger area available for valves, allowing them to be larger or greater in number, and a comparatively short stroke reduces crank stresses. [26] A schematic diagram of a cylinder from the chosen engine can be seen in Figure 2.17 below:
Figure 2.17 Schematic diagram from the engine simulation software showing a cylinder in the chosen engine with intake valve shown in blue and exhaust valve shown in orange
Another useful parameter to consider is the compression ratio rv. The idealised cycle of an internal combustion engine with spark ignition is the Otto cycle. The efficiency of the Otto cycle Otto increases with increasing rv as can be seen in Equation (7) below:(7) [23]The compression ratio for the chosen engine is 12.2:1 [27] which gives an Otto cycle efficiency of 0.63. Increasing the compression ratio will achieve greater efficiency because more mechanical work can be extracted from a given charge [28]. Unfortunately, the compression ratio cannot be increased to achieve greater efficiency. This is because increasing the compression ratio could lead to engine knock, a phenomenon whereby the combustion of a charge in a cylinder does not coincide with the spark from the spark plug and one or more pockets of air/fuel mixture explode outside the envelope of the normal combustion front. [29] Engine knock can destroy an engine in severe cases. Engine knock could be avoided by using fuel with a higher octane rating; the FSAE Rules [1] state that E85 is the only other option and its use will be discussed later. If the fuel octane rating and compression ratio were to be increased, the limiting factor would be high stresses on mechanical components in the engine, such as the crank and connecting rod. Due to the factors mentioned above, [7] the compression ratio of 12.2:1 will be retained. 2.4.7 ValvesThe valves in an engine allow gas flow into and out of its cylinders. The Honda CBR600RR has four valves per cylinder, two inlet and two exhaust valves, which are controlled by a double overhead camshaft or DOHC. A diagram of DOHC implementation is shown in Figure 2.18 below:
Figure 2.18 DOHC arrangement in an engine [30]A DOHC arrangement gives greater scope for tuning and thus increasing performance. There are two important things to consider with the design of valve gear, assuming the size and shape of each valve does not change: valve lift and valve timing. Valve lift refers to the distance a valve moves between fully closed and fully open positions. Valve timing refers to the angle of the crankshaft at which the inlet and exhaust valves open and close with respect to top dead centre and bottom dead centre. The valve movements are as follows: the exhaust valves open shortly before top dead centre (BTDC) to allow air to flow into the cylinders on the induction stroke. Next, on the compression stroke, the inlet valves close after bottom dead centre (ABDC). The exhaust valves then open towards the end of the combustion stroke, before bottom dead centre (BBDC), which results in a loss on the combustion stroke but ensures all combustion products have time to escape. Finally, the exhaust valves close, at the end of the exhaust stroke, just after top dead centre (ATDC). The process described above makes up the four strokes of a four-stroke engine cycle. It should be noted that there is some intake and exhaust valve overlap at top dead centre and this is usually limited by the clearance between the piston and the cylinder-head. [23] Engines designed for high performance have a large valve overlap and both inlet and exhaust valves open earlier and close later than standard engines. [18] [23] After optimisation in the engine modelling software, the valve timing was determined for the engine of choice. The valve timing diagrams before and after optimisation can be seen in Figure 2.19 below:
Figure 2.19 Valve timing diagrams before (left) and after (right) optimisationWhilst valve timing determines when each event takes place, valve lift determines the effective area for gas flow into and out of the cylinders. Increasing the valve lift above that originally intended for the engine without changing the piston design and/or connecting rod length could result in the engine being destroyed if the piston hits a valve and fractures; modifying the valve lift will not, therefore, be considered. Furthermore, there is a value of valve lift at which the effective area for gas flow through the valves reaches a maximum; any increase in valve lift beyond this point will not produce any increase in effective area for gas flow. The valve lift vs crank angle diagrams for the inlet and exhaust valves can be seen in Figure 2.20 below:
Figure 2.20 Valve lift vs crank angle for intake (left) and exhaust (right) valves
The effect of the optimised valve timing on the engine power output is considerable and is graphically represented in Figure 2.21 below:
Figure 2.21 Engine peak power output vs engine rpm for standard and optimised valve timing2.4.8 Fuel InjectionThere are three ways in which to add fuel to air in the engine intake system to create a charge; carburetion, low pressure injection (port injection) and high pressure injection (direct injection).A carburettor is a mechanical device used more commonly in older engines to regulate the amount of fuel going to the cylinders by making use of Bernoullis principle which states that for a fluid flowing in a pipe, the sum of the static and dynamic pressures is constant. If the air intake is reduced to a smaller diameter at a section, the velocity of the air will increase, while the static pressure will decrease. A carburettor makes use of this by having a petrol outlet orifice inserted into a reduced diameter section of the air intake and tiny petrol droplets are sucked from this orifice by the low static pressure described above. The droplets are carried along by the flow of air and ideally, if the air intake is placed close to the exhaust, the heat given off by the exhaust will help to vaporise the droplets. A diagram of a carburettor can be seen in Figure 2.22 below:
Figure 2.22 Diagram of a Carburettor [31]As the amount of fuel is controlled by the rate of air flow, the engine will respond slowly if the throttle is opened suddenly at low engine rpm. The placement of the intake next to the exhaust to help vaporise the fuel droplets also results in a lower intake air density and thus reduced performance. [32] Furthermore, the need for another venturi upstream of the throttle results in losses. For these reasons, a carburettor will not be considered.Fuel injection is more fuel efficient than carburetion because the fuel flow can be altered according to the downstream and user-input conditions to produce maximum power. Fuel injectors are solenoid operated plungers that squeeze fuel through a nozzle to atomise it and are controlled by engine electronic control units (ECU). Sensors measure engine rpm, intake manifold pressure, air temperature, coolant temperature and throttle position and the information is fed to the ECU which then determines how much fuel is needed. The required amount of fuel is injected at the right time either into the inlet ports (port or low pressure injection) or into the cylinders directly (direct or high pressure injection).Port injection uses injectors at the inlet ports to each cylinder, just upstream of the inlet valves, whereas direct injection uses injectors located in the cylinder head to inject fuel directly into the cylinders. Direct injection achieves greater efficiency than port injection because there are no throttling losses but direct injection requires much more sophisticated and expensive hardware and software; as the injectors are exposed to higher pressures and temperatures, higher quality materials have to be used as well as higher precision electronic systems. [23] [33] [34] The Honda CBR600RR comes with a dual stage fuel injection system which uses low pressure injection. Fuel injectors are placed at the inlet ports and at the upstream end of the intake runners. The injectors at the upstream end of the intake runners operate at high rpm and give greater vaporisation time as well as greater exposure to the turbulent mixing of the flow; this cools the flow of air and ultimately results in a denser charge, giving more power. [35] As direct injection would require expensive equipment and significant alterations to the engine, the stock dual stage low pressure fuel injection system on the engine will be used.2.4.9 FuelThe FSAE Rules stipulate that there are two types of fuel available for use: gasoline and E85. If using E85, the air intake restrictor has to have a 19 mm diameter. [1] E85 is a mix of 85% denatured ethanol fuel and 15% gasoline, giving it a higher octane rating than standard gasoline. An engine using a high octane fuel such as E85 needs to have a very high compression ratio. Use of E85 in an engine designed for gasoline achieves lower fuel economy as more fuel is needed per unit of air than when using gasoline. E85 is corrosive to the rubber seals often found in fuel systems designed for use with gasoline so these components may fail prematurely. [36] The Honda CBR600RR engine is designed for use with gasoline. If E85 was to be used, seals would need to be changed, the compression ratio would have to be increased (which would increase engine stresses), a lower fuel economy would be achieved (resulting in the need for a greater amount of fuel and this would decrease the number of points scored for efficiency) and a smaller diameter air restrictor would have to be used (which would make a 10% difference to restrictor area and would reduce performance). For these reasons, gasoline will be used rather than E85.2.4.10 Air/Fuel and Equivalence RatioThe air to fuel ratio (AFR) is the ratio of the mass of air to the mass of fuel in a combustion process. The condition when there is exactly the right amount of air present to burn all of the fuel is called stoichiometric combustion. The combustion of gasoline in air produces CO2 and H2O as can be seen in Equation (8) below:(8) [37]Calculating the AFR using the respective molecular masses of air and gasoline, together with the equation above, it can be shown that the stoichiometric AFR = 14.7. This means that for total combustion of 1 kg of gasoline, 14.7 kg of air are needed. [38] Unfortunately, this theory does not hold in the case of internal combustion engines. The charge of air and fuel in each cylinder will not be perfectly mixed and the time available at each combustion stroke is short (in the region of a few milliseconds), especially at high engine rpm. In order to compensate for this, the equivalence ratio, the ratio of the stoichiometric AFR to the actual AFR, needs to be greater than one. [23] The equivalence ratio is shown below in Equation (9):(9) [38]If a charge has a greater AFR than stoichiometric, the charge is called lean and the equivalence ratio is less than one. Conversely, if the AFR is less than stoichiometric, the charge is considered rich and the equivalence ratio is greater than one. In the case of a lean mixture, all the fuel in the charge will be burned, leaving some air unburned, resulting in reduced performance. In the case of a rich mixture, the maximum amount of fuel will be burned in the available air, resulting in lower fuel efficiency (although a rich mixture helps to cool the engine). This behaviour is shown in Figure 2.23 below:
Figure 2.23 Response of specific fuel consumption and engine power output with change in equivalence ratio. [23]
If the mixture of fuel and air becomes too rich, the power output drops. Ideally, the engine should be run at the highest point on the top curve in Figure 2.23 to produce maximum power, even though the specific fuel consumption will not be at a minimum. Using the engine modelling software, this optimum equivalence ratio is = 1.05, providing maximum power. 2.4.11 Fuel ConsumptionAn important consideration of the engine is the fuel consumption because the fuel and fuel tank will add weight to the car, decreasing its performance. The brake specific fuel consumption is given for the engine by the engine modelling software and can be seen in Figure 2.24 below:
Figure 2.24 Graph of BSFC against engine rpm
The graph in Figure 2.24 above shows that the specific fuel consumption does not increase dramatically until about 11,500 rpm, the point at which the engine will be operating. At this point, BSFC = 250.7 g/kW/hr. It is possible to find the amount of fuel needed in the endurance race by using Equation (10) below: (10)With the volume V in litres, power P in kW, brake specific fuel consumption BSFC in g/kW/hr, time t in hours and the density of fuel f = 0.71e3 kg/ m^3. [37] In order to determine the value for t (the time the car will take to complete the race), the lap time will need to be taken into account along with a weighting for throttle position within each part of the track. A safety factor will be used so the discrepancy in lap times between the first and subsequent laps can be ignored. In a lap completed in 36 seconds, as will be shown later in the report, roughly 16 seconds are spent at full throttle, 8 seconds at mid throttle, 6 seconds at low throttle and 6 seconds are spent braking. Working on the assumption that under braking and at low throttle, the BSFC goes down to 10% of the value at full throttle and when at mid throttle, BSFC goes down to 40% of the value at full throttle, the equivalent time spent at full throttle can be worked out. [18] For the 27 lap endurance race, the equivalent time t in hours can be calculated using Equation (11) below: (11)Using the value of t calculated in Equation (11), and using the values given by the engine modelling software, it can be shown that the required amount of fuel for the endurance race V = 3.91 litres; this is the worst case as the density of fuel used was a minimum value. Using a safety factor of 1.3, to account for any waiting at the start of the race and driving to and from the pits, a fuel tank of 5 litres will be necessary.2.4.12 Fuel TankIn order to comply with the FSAE Rules, [1] a fuel tank made of rigid material must not carry any structural loads but it can be any size and can be made of any material. The fuel tank should lie entirely within the monocoque chassis and a firewall must separate the tank from the driver to reduce the risk of burns. A suitable material is carbon fibre as this is lightweight and provides rigidity. Carbon fibre is an expensive material to buy and to work with but there are products available that meet the requirements. The carbon fibre fuel tank used in Formula Seven is suitable for Formula Student and this will be the tank used for the car. At a cost of 400, the tank is not cheap but comes equipped with a fuel pump. [39] A picture of the fuel tank can be seen in Figure 2.25 below:
Figure 2.25 Carbon fibre fuel tank to be used2.5 Fine TuningAt this stage of the design considerations, the engine is giving maximum power output; the flow is choked at the venturi so no more air is able to get into the cylinders during each cycle. This is a good result considering the specification. However, it should be possible to optimise the intake and exhaust runner lengths, making use of resonance tuning. Resonance tuning would not increase the power output of the engine but would reduce the engine rpm at which the maximum power is produced, thus lowering fuel consumption. This would make the car lighter as it would need to carry less fuel, which in turn would increase its performance. Resonance tuning works as follows: as valves open and close, compression and rarefaction waves are induced in the compressible fuel and air mixture in the intake and exhaust runners. When the waves reach the end of the runners they are reflected. If the length of the runners is just right, the waves act to increase volumetric efficiency. The available benefits are very sensitive to engine rpm. A diagram showing the operation of resonance tuning can be seen in Figure 2.26 below:
Figure 2.26 Diagram displaying the operation of resonance tuning [40]Figure 2.26 above shows an inlet valve open at stage 1. At stage 2, the inlet valve is snapped shut and a compression wave forms. This compression wave travels along the pipe at stage 3. At stage 4, the compression wave is reflected at the end of the pipe and travels back down the pipe at stage 5. At stage 6, the compression wave arrives at the open inlet valve at just the right time to force more air and fuel mixture into the cylinder than would otherwise be the case, increasing volumetric efficiency. The same principle applies to the exhaust side of the engine, but instead a rarefaction wave arrives at the exhaust valve at just the right time to help draw the burnt mixture from the cylinder, also known as scavenging.A diagram showing the effect of the timing of the arrival of pressure waves on volumetric efficiency for the intake valve can be seen in Figure 2.27 below:
Figure 2.27 Diagram displaying the effect of timing on volumetric efficiency [23]
Figure 2.27 shows that the pressure waves must arrive at just the right time to maximise volumetric efficiency, so precise calculation of the timing is needed. [41] The same considerations apply to silencers, where the geometry of the silencer can be made such that pressure waves cancel each other out, reducing the noise level whilst also minimising the restriction to flow. [23]A further consideration for manifolds is the layout of the intake and exhaust runners. In order to maximise the effects of resonance tuning, the system should avoid sending pressure waves from separate cylinders into the same pipe at the same time as this will lead to increased losses. Two obvious options for the arrangement of the exhaust manifold are a four-to-two-to-one (4-2-1) or a four-to-one (4-1) connection. Only the latter reaps the benefits of resonance tuning at high engine rpm so the 4-1 arrangement will be used. The layout of the intake system is less problematic and will make use of a one-to-four (1-4) system. [23] An example of the intake layout with the inclusion of a plenum (intake chamber) and a throttle can be seen in Figure 2.28 below:
Figure 2.28 Intake system with 1-4 intake runner arrangement [23]2.6 ConclusionAfter all optimisation, the final engine power output is shown in Figure 2.29 below:
Figure 2.29 Final peak power output vs engine rpm
As can be seen in Figure 2.29 above, the engine gives a peak power output of 96.9 hp (72.2 kW) at 11,500 rpm; this is well above the specified 65 hp. The engine also exceeds the other criteria set out in the specification. The torque achieved at 11,500 rpm is 59.1 Nm which is greater than the 50 Nm specified. Despite the requirement of a 20 mm restrictor, the power produced after optimisation is close to the stock engine power output compared with the restricted engine with no optimisation. At 32 kg, it is well within the 60kg weight specification. [42] The Honda CBR600RR engine is easily sourced from ebay for less than 2000. [8] Efficiency has been taken into account throughout, including during the selection of a 5 L fuel tank. Packaging is also important and where possible, the size of components has been kept to a minimum whilst maximising power. The fact that the car will use a CVT means the engine is able to run constantly at 11,500 rpm, producing 96.9 hp at all times; this will make the car highly competitive. In practice, the actual values for power and torque may vary from the theoretical values given in the engine modelling software; if the project included the actual manufacture of the car and its components, testing on track could be done and the performance optimised using telemetry. The Honda CBR600RR appears to be a good choice of engine.2.7 References[1] http://www.fsaeonline.com/content/2015-16%20FSAE%20Rules%20revision%2091714%20kz.pdf[2] http://www.topspeed.com/motorcycles/motorcycle-reviews/yamaha/2013-yamaha-phazer-m-tx-ar131346.html[3] http://en.wikipedia.org/wiki/Snowmobile[4] http://en.wikipedia.org/wiki/Honda_CBR600RR[5] http://en.wikipedia.org/wiki/Suzuki_GSX-R600[6] http://www.motorcyclespecs.co.za/model/yamaha/yamaha_wr450f%2003.htm[7] Private communication with Professor Richard Stone[8] http://www.ebay.com/itm/Honda-CBR600RR-CBR-600RR-Engine-Motor-2008-07-09-Guaranteed-Low-miles-/121594369273[9] http://www.motorcycle-usa.com/115/396/Motorcycle-Article/2003-Honda-CBR600RR-First-Ride.aspx[10] http://www.lotuscars.com/engineering/engineering-software[11] https://lotusproactive.files.wordpress.com/2013/08/getting-started-with-lotus-engine-simulation.pdf[12] P4 Fluid Mechanics Lectures: Dr. P McFadden, HT2012[13] http://en.wikipedia.org/wiki/Bell_mouth[14] http://www.bosch-mobility-solutions.de/de/de/_technik/component/PT_PC_CNG_Air-Management_PT_PC_Compressed-Natural-Gas-02_12737.html?compId=980[15] http://sohc.nl/pictures/engine/%5B2010-03-25%5D_parts/roller_barrels_01.jpg[16] Flow Characteristics and Performance Evaluation of Butterfly Valves Using Numerical Analysis: IOP Publishing, doi:10.1088/1755-1315/12/1/012099[17] Flow of Fluids Through Valves, Fittings and Pipe: Crane 1982[18] Private communication with Professor Ray Lohr[19] Contraction, Expansion, Pressure Drop: Saeid Rahimi, 2011[20] http://en.wikipedia.org/wiki/Plenum_chamber[21] http://auto.howstuffworks.com/turbo2.htm[22] http://www.grc.nasa.gov/WWW/k-12/airplane/mflchk.html[23] Introduction to Internal Combustion Engines: R Stone, Macmillan 1992[24] Engineering Tables and Data: A Howatson, P Lund, J Todd, Department of Engineering Science, 2009[25] http://www.f1fanatic.co.uk/2013/06/21/renault-reveals-2014-f1-engine/[26] http://en.wikipedia.org/wiki/Stroke_ratio[27] http://www.aperaceparts.com/tech/2009hondacbr600rr.html[28] http://en.wikipedia.org/wiki/Compression_ratio[29] http://en.wikipedia.org/wiki/Engine_knocking[30] http://commons.wikimedia.org/wiki/File:Four_stroke_cycle_power.png[31] http://journeytoforever.org/biofuel_library/z-image/dranefig5-1.jpg[32] How Things Work, The Universal Encyclopedia of Machines: Paladin, Granada Publishing Limited, 1972[33] http://en.wikipedia.org/wiki/Fuel_injection[34] http://en.wikipedia.org/wiki/Indirect_injection[35] http://www.honda.com/newsandviews/article.aspx?id=1775-en[36] http://en.wikipedia.org/wiki/E85[37] http://en.wikipedia.org/wiki/Gasoline[38] http://en.wikipedia.org/wiki/Air%E2%80%93fuel_ratio[39] http://www.formula-seven.com/shop-products/carbon-fiber-fuel-tank/[40] http://rennlist.com/forums/944-turbo-and-turbo-s-forum/784852-ultra-high-flow-low-cost-8v-head-project-12.html[41] http://www.autozine.org/technical_school/engine/Intake_exhaust.htmlAlastair Adams-CairnsSt. Edmund HallEngine[42] http://cbrforum.com/forum/cbr-600rr-12/enigne-weight-cbr600rr-25219/3Thermal Management 3.1IntroductionThe thermal management of a formula student race car is a vital component in the performance of the car. The car needs to have an adequate cooling system, which has a capacity proportional to the power output of its engine. The primary function of the cooling system is to maintain proper and reliable engine performance within an optimal temperature range. In order to design the cooling system the relevant 2015 Formula SAE competition rules must be reviewed. The main limitation states that any water-cooled engine must only use plain water [1]. Operating below the minimum engine temperature can cause excess use of fuel and corrosion of the engine and cooling system. Operation above the maximum engine temperature decreases the oil viscosity causing wear, excessive oil consumption and decreased mechanical power output. It is therefore vital to maintain control over the engine temperature. The first variable to consider when designing an engine cooling system is the required heat loss. A commonly used rule is shown in the equation below [2]:
Effectively one third of the heat produced by the engine is converted into mechanical work; one third is lost to ambient air as exhaust and frictional heat. The final third is required to be removed by the cooling system. This is a reasonable estimate; internal combustion engines are inefficient, usual efficiency of about 25 % to 30 % [3] and the waste heat removed from the engine is fairly evenly split between the hot exhaust gases and the cooling system. For this car the power output is 72 kW leading to a cooling load of 24 kW.3.2Basics of the cooling systemIn general two basic types of cooling systems exist. They both transfer heat from the engine block to the ambient air. The two methods for removing heat are air or liquid cooling. Air cooling works by relying on air flowing directly over hot parts of the engine to dissipate heat. Cooling fins can be used to increase the effective cooling area that heat transfer can occur across. This method is limited to low power engines as they can only dissipate small amounts of heat. Liquid cooling relies on parts of the air cooling method in combination with the use of a coolant, usually water, flowing through the engine as an intermediate medium to remove heat and achieve more effective cooling. The limitations of air cooling can be made evident by comparing air and water, air has a lower heat capacity and less than a tenth the conductivity [4]. Thus air cooling requires unrealistically high air flow velocities and an extremely large heat exchanger surface area to achieve the same level of cooling. Liquid cooling is therefore used in formula student race cars.
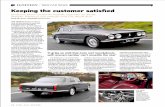
Figure 3.1 Engine cooling system [5]Following the SAE rules the coolant used here is plain water. A thermostat or the engine control unit, ECU, is used to maintain the engine temperature. It controls the power to the coolant pump; if the engine is overheating the thermostat will increase the power and thus increase the flow rate of the coolant through the engine and vice versa. When designing a cooling system there are three different variables to work with: the coolant flow rate through the engine block; the airflow rate through the radiator and the heat transfer capability of the radiator. 3.3 Cooling system componentsThere are a number of different components within a cooling system which can be chosen and designed to ensure the desired values of the variables above. The coolant flow rate is set by a range of different pumps and is controlled by either a thermostat or an ECU, which vary the flow rate depending on demand. The airflow rate through the radiator will vary depending on the overall shape of the body work, side pods, and positioning of the radiator. It can also be increased by attaching a fan to the radiator. The radiators heat transfer capability relies on a number of different variables which will be looked at in more detail later. 3.3.1 Coolant pump selection The initial decision regarding the coolant pump is whether to use a mechanical or an electrical pump. A mechanical pump is traditionally used in cars. It works by taking mechanical energy from the engine, in the form of a spinning rubber belt, and uses it to drive an internal pump mechanism. This results in a decrease in either the cars power output or fuel economy or both as it is running off energy directly from the engine. The mechanical pump spins all the time at a speed proportional to the engine speed. As a result coolant is sometimes being pumped when the engine is not at a temperature which requires cooling. Conversely an electrical pump runs on the battery power and can be controlled through an ECU .This is significantly more accurate as coolant flow rate through the engine is set depending on a given temperature range. The drawbacks of electric pumps are that they are more expensive and typically are not as powerful. The electrical system has been chosen, as is the case for most formula student teams, mainly due to the higher level of control, ECU section 7.2.5, typically smaller size of the pump, and improvements of around 3.7 kW over a mechanical system. The chosen pump is the Davies Craig EWP80 [6], costing 135 and weighting 0.9 kg. This pump has a maximum flowrate of 80 L/min.
Figure 3.2 A graph showing pressure and current vs flow for the pump, provided by Davies Craig [6]3.3.2Cooling fan selectionCooling fans are used to control the airflow velocity over the radiator. The airflow velocity affects the ability to transfer heat; slower airflow has a higher exit temperature hence a higher average cooling temperature because more heat transfers by convection. A higher average cooling temperature means that less heat is transferred from the coolant to the air. Faster airflow velocities will increase the differential between the coolant and the cooling air; it will have a lower average cooling temperature, and therefore increase the capability to transfer heat. For this formula student race car the Jegster 40533 Jegster fan and shroud kit [7] has been chosen. This kit contains a fan with a 12 diameter with the ability to produce an airflow rate of 1200 CFM. The shroud reduces losses in thrust from the tips of the fan blades. The kit costs 98 and has a weight of 1.5 kg. 3.4Radiator analysisNomenclature:cp, water water specific heatcp, air air specific heat water water mass flow rateair air mass flow rate CW heat capacity of water CA heat capacity of air Cmin minimum heat capacity Cmax maximum heat capacity hwater heat transfer coefficient for the waterhair heat transfer coefficient for the air q heat transfer rate qmax maximum possible heat transfer rate effectiveness NTU number of transfer units Th, inlet inlet temperature of the hot fluidTc, inlet inlet temperature of the cold fluid Aex external surface areaAin internal surface area UA overall heat transfer coefficient Cr heat capacity ratio The radiator is a heat exchanger used for cooling the internal combustion engine. Heat exchangers are implemented to allow the process of heat exchange between two fluids that are at different temperatures and separated by a solid wall; in this case the two fluids are the coolant (water) and the ambient air. The analysis applied here was first carried out on a stock aluminium radiator [8] where every dimension was known. This was extended to design a new radiator which fits the needs of the formula student race car being designed. In order to save both time and money the designed radiator was then compared to radiators available on the market and the most similar one was chosen. The method of analysis used is based on the effectiveness number of transfer units, NTU, method described in Fundamentals of Heat and Mass Transfer [9] and has been summarised below. In order to define the effectiveness one must first determine the maximum possible heat transfer rate [9].
The number of transfer units is a dimensionless parameter that is widely used for heat exchanger analysis. The overall heat transfer coefficient is needed to be known in order to find the NTU [9].
For each heat exchanger there is a specific form of the effectiveness NTU relation. In this case a cross flow (single pass) heat exchanger is being used with both fluids unmixed. The relationship between effectiveness and NTU is shown below [9].
The dimensions of the stock aluminium radiator initially analysed are given in table 3.1. The values of both the external and internal surface areas can be calculated and were found to be 34.2 m2 and 3.14 m2 respectively. Table 3.1 Radiator dimensions [8]Lradiator (m)Hradiator (m)Wradiator (m)Wtube (m)Htube (m)Lfin (m)Wfin (m)Hfin (m)NtubeNfin
0.66350.45720.06030.02540.00210.00400.05840.000186780
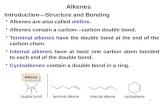
A simulation of the cooling system was made in Matlab, in which the mass flow rates of both the water and the air could be varied to show how they affect the heat rejected by the cooling system. This cooling system with the stock aluminium radiator could only achieve the required heat loss, 24 kW, with a mass flow rate of water equal to or greater than 1 kg/s and a mass flow rate of air equal to or greater than1.3 kg/s. The chosen pump has a maximum flow rate of 1.33 kg/s which is over that required, however this is a simplified model and in practise it would be advised to be further away from the pumps working limit. The mass flow rate of air cannot be achieved by the chosen fan. Therefore the radiator needs to be redesigned.
Figure 3.3 Surface plot for stock radiator
The heat transfer rate for the radiator can be amplified by increasing both the internal and external surface areas. In addition to this the overall size of the radiator needs to be reduced to allow it to fit within the cars body work. In order to achieve this decrease in size and increase both the surface areas, the number of tubes and the total fin surface area within the radiator must both increased. The redesigned radiator has achieved a frontal area of 0.0758 m2 with Aex = 40 m2 and Ain = 4m2. Matlab was used to show the change in the heat transfer rate.
Figure 3.4 Surface plot for redesigned radiatorIn order to save both time and money a radiator with similar dimensions has been found. The Suzuki LTR450 Aluminium Radiator 2006-2009 [10] meets the needs of this formula student car. The radiator has an overall size of 17.44 x 9.02 x 4.65, weights 2.27 kg and cost 130. 3.5ConclusionThe cooling capacity of a formula student car is a very difficult thing to model. In the areas where less specific analysis has been done, other formula student teams results and choices have influenced the ones made here. This provides a factor of safety as they have been tried and tested, producing real results. Where the analysis in this report goes into more detail a level of safety has again been taken into account. Hence making sure that the simplifications and assumptions made in the analysis will not lead to failure on the track. Thermal management needs particular care as a car without a properly working cooling system will be unsafe for use. 3.6 References[1] 2015 Formula SAE Rules, T8.1, 2015, p. 61[2] Day, J., The Bosch Book of the Motor Car, 1975, p. 67[3] [Online] http://en.wikipedia.org/wiki/Engine_efficiency[4] [Online] http://en.wikipedia.org/wiki/internal_combustion_engine_cooling[5] [Online] http://www.repairpal.com/cooling-system [6] [Online] http://www.daviescraig.com.au[7] [Online] http://www.jegs.com/i/Jegster/550/40533/10002/-1 [8] Carl, M., Guy, D., Leyendecker, B., Miller, A., Fan, X., The Theoretical and Experimental Investigation of the Heat Transfer Process of an Automobile Radiator 2012, p. 10[9] Incroera, DeWitt, Bergman, Lavine, Fundamentals of Heat and Mass Transfer, vol. 6, 2007, p. 686[10] [Online] http://www.mishimoto.co.uk/suzuki-ltr450-aluminium-radiator-06-09
Robert Bainbridge St. Catherines CollegeThermal Management
4. Aerodynamics4.1IntroductionAerodynamics is a major part of any race car. The overall aims are to create as much downforce, negative lift, whilst keeping the aerodynamic drag on the car to a minimum. Maximum downforce is desired because it increases the normal loads on the tyres, increasing the grip, without the corresponding addition of mass. The downforce is limited by its corresponding drag; in most cases increasing the downforce on a car will increase its drag. So the design of the car must be optimised. This optimisation will vary depending on the nature of the track. For a fast track with fewer turns minimising the drag and thus having less downforce will be the optimal design and vice versa for a corner heavy track. Formula Student is a competition where cars from competing teams will be judged to determine the best overall car in terms of cost, reliability and performance. The competition is split into static and dynamic events. The dynamic events test the cars performance in different scenarios such as autocross, acceleration and endurance. The endurance event is worth the most points, 300. For this reason the analysis carried out in this chapter is based on maximising the cars performance in this event. Meaning downforce is prioritised to increase cornering speed resulting in faster lap times. Methods of simulation such as computational fluid dynamics have been developed and used here to help overcome the problems associated with aerodynamic optimisation of an entire car. It is the objective of this chapter to design the aerodynamic package of a formula student racing car. As well as determine the material from which these aerodynamic features will be manufactured. 4.2Material selection analysis for the aerodynamic package4.2.1IntroductionIn this section the different materials from which the aerodynamic package will be made are considered and analysed. The analysis is mainly considering three parts of the package; the two side pods and a single piece nose cone. The reasons being are that these pieces are for one the largest and therefore contribute the most to the overall mass of the car, as well as requiring the most structural strength because failure will lead to an unusable car. For each material the weight, strength, cost and ease of manufacture are considered. A final decision is made using multi-criteria analysis based on the aforementioned design criteria. 4.2.2Material propertiesThe options have been narrowed down to four different materials, one metal alloy, two composites and a polymer. Table 4.1 Properties of the different materials
Materials Cost of raw materials (/kg)Density (kg/m3)Youngs Modulus (GPa)UTS (MPa)
ABS Plastic 0.54[1]1040[2]2.2[2]45[2]
Aluminium Alloy (7075-T6)1.21[3]2700[3]70[3]570[3]
CFRP73.85[3]1500-2000[4]150-250[4]1000-1500[4]
GFRP2.62[3]1500-2500[4]80-100[4]~1000[4]
Acrylonitrile butadiene styrene (ABS) has been selected due to its availability, formability, low cost and low weight. Its weight is even lower than that of carbon fibre reinforced polymer (CFRP). CFRP is very strong, however this comes at a price as it is by far the most expensive of the four materials. Glass fibre reinforced polymer (GFRP) has comparable strength and is a lot cheaper. The construction process for both CFRP and GFRP is very expensive and time consuming. The aluminium alloy is the second most economical material and has a simple yet relatively dimensionally inaccurate manufacturing process. 4.2.3 Manufacture The construction of the body parts follows a different process depending on the type of material used. It is important to consider each manufacturing method in detail as they vary in the complexity, price and accuracy. The accuracy is of high importance because the shapes of the aerodynamic body parts designed in this chapter need to be manufactured with high dimensional accuracy to act as the experimental results have predicated. ABS is a thermoplastic which can be vacuum formed into the desired shapes. This process involves heating a sheet of ABS until it becomes workable and then draping it over a mould. The edges are sealed against the mould; a vacuum pressure is then applied from under the mould, forcing the plastic onto the mould increasing dimensional accuracy. The part then pops off the mould as pressure is released [2]. This method is a very cost effective way of producing parts; the moulds themselves are inexpensive and can be constructed from a range of cheap materials such as medium density fiberboard (MDF) or polystyrene foam. The cycle can range from 2-10 minutes per part. The downsides to this method are that a lot of material waste is produced and it cannot guarantee that a constant wall thickness is maintained, which means the strength of the parts may be impaired. Companies such as Airforme [5] provide the service of producing vacuum formed parts. The total cost of their services for the required body parts is estimated at 200.High performance parts made out of CFRP are often manufactured using the process of vacuum bagging as it prevents small air bubbles forming in the material which will reduce strength. A polished and waxed fiberglass, carbon fibre or aluminium mould has a release agent applied to it. The fabric and resin can then be applied; the vacuum is pulled and set aside to allow the piece to harden. There are three different ways to apply the resin to the fabric in a vacuum mould. Dry layup is the preferred method as it has the least amount of resin waste and can produce the lightest constructions [6]. The cost of manufacture has been estimated from an online supplier [7]; producing the moulds and purchasing the equipment will be around 1000. GFRP has a very similar manufacturing process. The difference between these two composites is the cost of the raw materials. This manufacturing method is expensive in terms of both money and time, each part needs one to two days to cure, but it will produce dimensionally accurate parts. The materials used are also a lot stronger. Finally aluminium sheet is considered. A specialist is required to work large aluminium sheets into the desired shapes; costing a similar amount to the composite manufacturing procedure. Construction of the parts out of aluminium would take less time than the composites however it is very hard to get a similar level of dimensional accuracy during the metal shaping process. 4.2.4 Multi-criteria decision analysisMulti-criteria decision analysis is a tool for appraising and ranking alternative options against a given set of weighted objectives and criteria. The relevant decision making criteria (strength, cost, weight, ease of manufacture, dimensional accuracy) are assigned a weight from 1-5, one being unimportant and five important. Each material is then given a rating against these criteria; one is a low score and five high. The ratings and weights are multiplied and totalled for each option. The material with the highest weighted score is selected and used to construct the aerodynamic package. Table 4.2 Multi-criteria analysis for material selectionCriteriaWeightABS PlasticAluminium Alloy (7075-T6)CFRPGFRP
RatingScoreRatingScoreRatingScore RatingScore
Strength414312416312
Cost155331144
Weight552515525315
Ease of Manufacture3412393939
Accuracy5420210525525
Total66397665
The weightings have been set with the aim of winning the Formula Student competition. Therefore the criterion which affects the cars performance is a priority. The weight and dimensional accuracy of each component are directly related to on track speed and have therefore been weighted the highest. Due to the large budget and time scale set out in this report both cost and ease of manufacture are considered less important criteria and have been weighted to reflect this. CFRP has the highest weighted score, largely due to its low density and dimensionally accurate manufacturing process, and is therefore chosen as the material used for the parts which make up the aerodynamic package. 4.3 Undertray 4.3.1 IntroductionThe undertray of a formula racing car is designed to accelerate the airflow under the car, creating an area of low pressure, thus increasing downforce whilst creating minimal drag. A shaped piece of body work at the rear of the car, known as the diffuser, draws the air out from under the car. The car is essentially sucked onto the track increasing the level of grip available through the tires. In terms of creating the aerodynamic package of a formula student racing car the largest addition in downforce whilst keeping the drag to a minimal comes from the design of the undertray. This design can be split into two key areas of analysis: the ground clearance, gap between the underside of the car and the road, and the diffuser angle, the angle the diffuser makes with the road. 4.3.2 TheoryThe gap between the underside of a car and the road it is traveling along is known as the ground clearance. The size of this gap can be optimised in order to exploit an effect known as the ground effect. This effect uses a number of fluid mechanics principles to create downforce. As the air flows under the car the cross sectional area available for the passing air between the car and the ground decrease, according to the principle of continuity the air must accelerate. As a result pressure under the car drops, shown by Bernoullis equation [8] for steady incompressible flow along a streamline:
Where:v = velocityp = pressure = density z= elevationg = acceleration due to gravityA region of low pressure is created under the car. The pressure on top of the car is unaffected; a pressure difference across the car is produced resulting in a net downward force. The critical ground clearance can be found by setting up a two dimensional model of the undertray of the car in Ansys CFX, a computational fluid dynamics software package. A diffuser eases the high velocity airflow underneath the car back to the velocity of the ambient atmosphere and helps fill in the area behind the car reducing the drag and increasing downforce. As the airflow leaves from beneath the car the diffuser also imparts upward momentum on the air which further increases the downforce produced [9]. The aim is to find the critical diffuser angel at which the underbody airflow decelerates and expands providing as much pressure recovery as possible without causing flow separation as this will induce drag.
Figure 4.1 Air flow under a rear diffuser [10]4.3.3 Computational fluid dynamicsComputational fluid dynamics, CFD, is a branch of fluid mechanics that uses numerical methods and algorithms to solve and analyse problems that involve fluid flow [11]. A CFD software package called Ansys CFX was used in this report to find the critical ground clearance and the critical diffuser angle. All CFD software follows the same methodology; usually split into three sections preprocessing, the simulation and post processing. During preprocessing the geometry of the problem is defined, using computer aided design (CAD). The volume occupied by the fluid is split into discrete cells, a process known as meshing. The physical model and the boundary conditions are then defined. This involves defining the equation used in the simulation and specifying the fluid behaviour and properties at the boundaries of the problem. The simulation is started and the equations are solved interactively. Once the simulation is complete a post processor is used to analysis and visualise the resulting solution [11]. The geometry shown in figure 4.2 was used to find these critical values. The length of the model, L, and the front angle, front, were estimated from the chassis model as 2300mm and 12.50 respectively. The ground clearance, , and the diffuser angle, d, were varied independently in order to optimise them both. Lfrontd
Figure 4.2 The geometry used for the undertray simulationsAnsys CFX has been used in this report to create an unstructured mesh, which can be identified by irregular connectivity. In order to run a two dimensional simulation in CFX, it is required to run the simulation in three dimensions with the mesh only one cell thick. Three bodies of influence were set up to vary the density of the mesh for the different regions of interest. Two of these had element sizes of 1e-2 m and 4e-2 m analysing the flow around the entire tray and the downstream flow respectively. The region between the road and the car has the finest mesh, element sizing of 2e-3 m, as understanding the behaviour of the flow through this gap is of most importance.
Figure 4.3 The overall mesh generated in CFX
Figure 4.4 Shows the variation of mesh densities for the different bodies of influenceThe inlet airflow velocity was set at 23.94 ms-1, flowing from left to right, this is the average simulated velocity for one lap. To show that the tray is moving relative to the ground; the ground is defined as a moving wall with a velocity of 23.94 ms-1 again going from left to right. Once the simulation has been run, Ansys CFX can be used to analyse the results. The pressure and velocity variations can be modelled on contour maps as shown in figures 4.5 and 4.6. It is then possible to calculate the total downforce and drag on the downward facing sections of the tray per meter width of the car. The simulation is limited by the fact it is two dimensional, the model does not simulate the lateral movement of the air into the diffuser. This lateral movement decreases the downforce generated by disrupting the airflow under the car. The pressure distribution on the underbody is likely to be semi-elliptical, max along the centre line and zero at the edges, so the average downforce should be over half the two dimensional value.
Figure 4.5 Contour plot showing pressure variation for a 60 mm gap and a 60 diffuser angle. Light blue is low pressure, dark red high
Figure 4.6 Contour plot showing the u direction, horizontal, velocity component of the airflow for a 60 mm gap and a 60 diffuser angle. Dark red is high velocity and light blue low.4.3.4 Diffuser angle analysis The initial plan of analysis was to set the diffuser angle to 12.50 and run the simulation with different gap sizes, recording the downforce and drag produced. The gap which produced the most downforce whilst keeping drag to a minimum would then be selected. With the gap set a number of simulations could then be run again, this time varying the diffuser angle. This process proved to be unfeasible. The geometry resulted in a critical ground clearance of 200 mm, which is far greater than the clearance expected. This difference is primarily due to over predicting the diffuser angle, which lead to the flow becoming detached from the diffuser and forming eddies and vortices. Figure 4.7 Plots of downforce and drag against ground clearance, d = 12.50 airspeed = 23.94 ms-1The approach was therefore reversed. The ride height was estimated partly from the rules; they state that the car must have a wheel travel of at least 50.8 mm, 25.4 mm jounce and 25.4 mm rebound [12]; and partly from consulting the individual in charge of the suspension. A ground clearance of 60 mm was used. The diffuser angles tested ranged from 20 to 12.50.
Figure 4.8 Plot of downforce against diffuser angle, = 60 mm airspeed = 23.94 ms-1
Figure 4.9 Plot of drag against diffuser angle, = 60 mm airspeed = 23.94 ms-1From the plot in figure 4.8 it is clear that a diffuser angle of 60 produces the most downforce. As discussed, when the angle is increase beyond this value separation of flow occurs and the downforce drops. An angle of less than 60 reduces the diffusers ability to create low pressure under the car and so the downforce decreases. It can be observed from figure 4.9 that there is an angle which produces the minimum drag. This angle found to be 40 but due to the negligible difference in drag between 40 and 60, 1.1N, the optimal design has a diffuser at an angle of 60. 4.3.5 Ground clearance analysisWith the diffuser angle set to 60 the simulation was run again this time varying the gap between the underside of the car and the road, . ranged from 20 mm to 120 mm. The air speed remained at 23.94 ms-1. The critical ground clearance was found to be 100 mm, having a gap larger than this produces less downforce because the cross sectional area the airflow travels through has increased in size, therefore the air velocity reduces and, as shown in section 4.3.2, the pressure will rise. The reason for the downforce decreasing when the gap is smaller than 100 mm is less clear. It can be partly put down to the geometry of the model. When the air flow hits the front angular section it creates a little lift, as the gap is reduced the pressure on this section grows and the magnitude of the lift increases. The rise in lift begins to outweigh the increasing downforce when the gap is smaller than 100 mm; reducing the front angle, front, will reduce this lift.
Figure 4.10 Plot of downforce against ground clearance, d = 60 airspeed = 23.94 ms-1
Figure 4.11 Plot of drag against ground clearance, d = 60 airspeed = 23.94 ms-1Although the critical ground clearance has been shown to equal 100 mm and figure 4.11 shows that increasing the gap size will decrease the drag; the chosen ride height is 60 mm. The chosen ride height has taken into account the three dimensional flow characteristics, lateral air flow under the car. Reducing the gap prevents lateral air flow and thus will prevent the associated reduction in downforce. If simulated with more complex geometry less lift is expected because the nose cone and front wing of the car will be designed to guide the airflow under the car without producing any unwanted lift. For these reasons a smaller ground clearance was chosen. 4.3.6 Conclusion It must be borne in mind that this is a heavily simplified model; adjustments have been made, where necessary, to account for these simplifications. In reality the diffuser will have a gradual change in angle as the air leaves from under the car which prevents flow separation and further increases the downforce. The undertray will usually have tunnelling to help guide the airflow under the car and prevent the lateral movement of air into the diffuser. The chosen design values are = 60 mm and d = 60.4.4 Wings NomenclatureV car velocity A frontal area R corner radius CD drag coefficient CL lift coefficient F driving force P engine power mc totals mass of car air density of air g gravitational acceleration - coefficient of frictionD drag force, L lift force, Aw wing planform area = span x chord4.4.1 Introduction Most formula style race cars will have a front and rear wing, both of which can consist of either single or multi elements. For this low speed race car it is necessary to evaluate whether the on track benefits of running the car with a wing package is worth the additional fuel consumption, associated with overcoming the drag, and the added cost of manufacture. To appreciate the desire to run a car with a wing package; it is important to understand how a wing creates lift or downforce. Think of an aeroplanes wing, the cross sectional shape, the wing profile, is designed in such a way that the air traveling over the top of it is accelerated. Resulting in a drop in air pressure, a pressure difference is created across the wing. The higher pressure below essentially pushes the wing upwards generating lift. In formula race cars these wing profiles are turned upside down. The effects are reversed and the wing is pushed towards the ground generating downforce. Wings can provide a huge amount of downforce at the expense of drag which effects top speed performance and increases fuel consumption. 4.4.2 Top speed performance The penalty for adding a wing package is the significant addition of drag; this is mainly caused by the rear wing. Drag effects the cars top speed and it is important to evaluate how much on the track performance can be sacrificed. The track courses designed for the Formula Student competition have a limited velocity and thus the added drag limit can be evaluated. The process involves finding the highest allowed drag coefficient, CD, Max, by following the steps set out by Pehan and Kegl [13]:1. Calculate the theoretical top speed, Vmax, without wings.2. Decide the desired top speed with the addition of wings.3. Calculate the difference in power absorption between these two cases.4. This difference will be donated to the wings to overcome drag and create downforce. 5. Calculate the CD, Max value that this represents.The acceleration of a car can be described using Newtons second law of motion, Force = mass x acceleration. In the horizontal direction the car experiences a driving force, F, produced by the engine and a resistive force, D, the total drag force (the rolling resistance is part of the transmission losses).
When traveling at top speed equilibrium between the driving force and the drag force is reached, the acceleration is zero. The engine power can be expressed in terms of the cars velocity and driving force. This equation can