
Oversampled Filter Banks and Predictive Subband Coders · Oversampled Filter Banks and Predictive...
215
Dissertation Oversampled Filter Banks and Predictive Subband Coders ausgef¨ uhrt zum Zwecke der Erlangung des akademischen Grades eines Doktors der technischen Wissenschaften unter Anleitung von Ao. Univ.-Prof. Dr. Franz Hlawatsch Institut f¨ ur Nachrichtentechnik und Hochfrequenztechnik Technische Universit¨at Wien und Ao. Univ.-Prof. Dr. Hans G. Feichtinger Institut f¨ ur Mathematik Universit¨atWien durch Dipl.-Ing. Helmut B¨olcskei Wien, im November 1997
Transcript of Oversampled Filter Banks and Predictive Subband Coders · Oversampled Filter Banks and Predictive...

Dissertation
Oversampled Filter Banks
and Predictive Subband Coders
ausgefuhrt zum Zwecke der Erlangung des akademischen Grades
eines Doktors der technischen Wissenschaften
unter Anleitung von
Ao. Univ.-Prof. Dr. Franz Hlawatsch
Institut fur Nachrichtentechnik und Hochfrequenztechnik
Technische Universitat Wien
und
Ao. Univ.-Prof. Dr. Hans G. Feichtinger
Institut fur Mathematik
Universitat Wien
durch
Dipl.-Ing. Helmut Bolcskei
Wien, im November 1997

ii

ABSTRACT
This thesis is concerned with the theory and applications of oversampled �lter banks and
predictive subband coders� Filter banks are used in many modern data compression
schemes� So far� the interest of the signal processing community has mostly been
restricted to critically sampled �lter banks� Only recently� there has been an increased
interest in oversampled �lter banks�
We provide a new frame�theoretic treatment of oversampled �lter banks and we show
that oversampled �lter banks have noise reducing properties and yield more design free�
dom than critically sampled �lter banks� We introduce oversampled cosine modulated
�lter banks� which are practically attractive since they allow an e�cient DCT�DST
based implementation� Furthermore� a novel subband image coding scheme based on
the new class of linear phase even�stacked cosine modulated �lter banks is developed�
We demonstrate that the proposed subband image coder outperforms existing subband
coders based on nonlinear phase cosine modulated �lter banks from a perceptual point
of view� We provide a subspace�based noise analysis of oversampled �lter banks and
we show that there exists an important tradeo� between noise reduction and design
freedom in oversampled �lter banks�
Finally� we introduce new� highly e�cient methods for achieving quantization noise
reduction in oversampled �lter banks� The resulting oversampled predictive subband
coders are attractive for subband coding applications where the resolution of the quan�
tizers used in the subbands is low� In this case our techniques help to drastically improve
the e�ective resolution of the coder�
iii

iv

KURZFASSUNG
Diese Arbeit besch�aftigt sich mit der Theorie und mit Anwendungen von
�uberabgetasteten Filterb�anken und pr�adiktiven Teilbandcodierern� Filterb�anke wer�
den in vielen modernen Datenkompressionssystemen eingesetzt� Bis jetzt wurden
haupts�achlich Filterb�anke mit kritischer Abtastung betrachtet� Seit kurzem besteht
jedoch vermehrtes Interesse an �uberabgetasteten Filterb�anken�
Wir f�uhren ein neuartiges auf der Theorie der Frames basierendes Konzept zur
Analyse �uberabgetasteter Filterb�anke ein� Wir zeigen� da� �uberabgetastete Filter�
b�anke ger�auschreduzierende Eigenschaften haben und mehr Entwurfsfreiheit als kri�
tisch abgetastete Filterb�anke bieten� Wir f�uhren �uberabgetastete cosinus�modulierte
Filterb�anke ein� welche praktisch interessant sind� weil sie e�ziente DCT�DST�
basierte Implementierungen erlauben� Weiters schlagen wir ein neuartiges teil�
bandbasiertes Bildcodierungssystem vor� welches auf der neuen Klasse der linear�
phasigen �even�stacked� cosinus�modulierten Filterb�anke beruht� Wir zeigen� da�
das resultierende Bildcodierungssystem bessere perzeptuelle Eigenschaften hat als
bestehende Bildcodierungssysteme� die auf der Klasse der nichtlinearphasigen odd�
stacked cosinus�modulierten Filterb�anke beruhen� Wir f�uhren eine Ger�auschanalyse
von �uberabgetasteten Filterb�anken durch�
Schlie�lich werden neuartige e�ziente Methoden zur Ger�auschreduktion in
�uberabgetasteten Filterb�anken vorgeschlagen� Die resultierenden �uberabgetasteten
pr�adiktiven Teilbandcodierer sind insbesondere f�ur Teilbandcodierungsanwendungen mit
Quantisierern geringer Au��osung interessant� In diesem Fall erm�oglichen die vorge�
schlagenen Methoden eine betr�achtliche Verbesserung der e�ektiven Au��osung des
Codierers�
v

vi

Die Begutachtung dieser Arbeit erfolgte durch�
� Ao� Univ��Prof� Dr� F� Hlawatsch
Institut f�ur Nachrichtentechnik und Hochfrequenztechnik
Technische Universit�at Wien
�� Ao� Univ��Prof� Dr� H� G� Feichtinger
Institut f�ur Mathematik
Universit�at Wien
vii

viii

To my parents and Karin
ix

x
Acknowledgments
I would like to thank the following persons who implicitly or explicitly contributed
to this thesis�
� Prof� F� Hlawatsch for his support during my research� He always had time for
discussions and helped to improve the presentation of the thesis�
� Prof� H� G� Feichtinger for many useful remarks concerning the mathematical as�
pects of my work� for the time he spent in countless discussions� and for initiating
my stay at Philips Research Laboratories Eindhoven�
� Prof� W� F� G� Mecklenbr�auker for his interest� support� and encouragement�
� Dr� A� J� E� M� Janssen for helpful discussions concerning both mathematical and
engineering aspects of my work� for arranging my stay at Philips Research Labo�
ratories Eindhoven� and for teaching me practical aspects of performing research�
� Dr� G� Kubin for useful discussions on predictive coding and subband coding�
� Dr� R� Heusdens for interesting discussions on �lter banks and on rate�distortion
properties of overcomplete expansions�
� Dr� W� Kozek for stimulating discussions on Gabor expansions and frame theory�
� Dipl� Ing� T� Stranz for producing many simulation results and �gures�
xi

xii

Contents
� Introduction and Outline of the Thesis �
� Introduction � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
�� Outline � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
� Oversampled Filter Banks and Frames �
�� Oversampled Filter Banks � � � � � � � � � � � � � � � � � � � � � � � � � �
��� Oversampled Filter Banks and Redundant Signal Expansions � � � �
���� Frame Operator and Polyphase Matrices � � � � � � � � � � � � � � �
���� Frame Bounds � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
��� Perfect Reconstruction and Frame Properties � � � � � � � � � � � � � � � �
���� Perfect Reconstruction � � � � � � � � � � � � � � � � � � � � � � � �
����� Completeness � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
����� Frame Conditions � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
����� Approximative Construction of the Synthesis Filter Bank � � � � � ��
����� Critical Sampling� Linear Independence� and Biorthogonality � � � ��
��� Oversampled Paraunitary Filter Banks � � � � � � � � � � � � � � � � � � � �
���� Equivalence of Oversampled Paraunitary Filter Banks and Tight
Frames � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
����� Construction of Paraunitary Filter Banks � � � � � � � � � � � � � � �
��� Important Special Cases � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
���� Diagonality in the Polyphase Domain � � � � � � � � � � � � � � � � ��
����� Diagonality in the Frequency Domain � � � � � � � � � � � � � � � � ��
����� Redundant Block Transforms � � � � � � � � � � � � � � � � � � � � ��
��� Oversampled FIR Filter Banks � � � � � � � � � � � � � � � � � � � � � � � � ��
���� Smith Form Decomposition � � � � � � � � � � � � � � � � � � � � � ��
����� Analysis of Oversampled FIR Filter Banks � � � � � � � � � � � � � ��
��� Simulation Results � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
� Oversampled DFT Filter Banks �
�� DFT Filter Banks and Weyl�Heisenberg Sets � � � � � � � � � � � � � � � � ��
��� Odd�Stacked DFT FBs � � � � � � � � � � � � � � � � � � � � � � � � ��
xiii
���� Even�Stacked DFT FBs � � � � � � � � � � � � � � � � � � � � � � � ��
��� Representations of the DFT FB Operator � � � � � � � � � � � � � � � � � � ��
��� Perfect Reconstruction � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
���� PR condition in the time domain � � � � � � � � � � � � � � � � � � ��
����� PR condition in the frequency domain � � � � � � � � � � � � � � � ��
����� PR condition in the polyphase domain � � � � � � � � � � � � � � � �
����� PR condition in the dual polyphase domain � � � � � � � � � � � � �
��� Frame�Theoretic Properties � � � � � � � � � � � � � � � � � � � � � � � � � �
���� Representations of the Frame Operator � � � � � � � � � � � � � � � ��
����� Time�Limited Prototype � � � � � � � � � � � � � � � � � � � � � � � �
����� Band�Limited Prototype � � � � � � � � � � � � � � � � � � � � � � � ��
����� Paraunitarity Conditions � � � � � � � � � � � � � � � � � � � � � � � ��
����� Integer Oversampling � � � � � � � � � � � � � � � � � � � � � � � � � ��
��� Design of Oversampled FIR Paraunitary DFT Filter Banks � � � � � � � � ��
��� Simulation Results � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
Oversampled Cosine Modulated Filter Banks �
�� Oversampled Odd�Stacked CMFBs � � � � � � � � � � � � � � � � � � � � � ��
��� Oversampled Even�Stacked CMFBs � � � � � � � � � � � � � � � � � � � � � ��
���� De�nition of Even�Stacked CMFBs � � � � � � � � � � � � � � � � � ��
����� Interpretation of the Subband Signals � � � � � � � � � � � � � � � � ��
��� Representation of CMFBs via DFT Filter Banks � � � � � � � � � � � � � � �
���� Odd�Stacked CMFBs � � � � � � � � � � � � � � � � � � � � � � � � � �
����� Even�Stacked CMFBs � � � � � � � � � � � � � � � � � � � � � � � � ��
����� A Fundamental Decomposition � � � � � � � � � � � � � � � � � � � �
����� Relation with MDFT Filter Banks � � � � � � � � � � � � � � � � � ��
����� Representations of the CMFB Operators � � � � � � � � � � � � � � ��
��� Perfect Reconstruction Conditions � � � � � � � � � � � � � � � � � � � � � � ��
���� PR Conditions Using the CMFB Operators � � � � � � � � � � � � ��
����� PR Conditions in the Time Domain � � � � � � � � � � � � � � � � � ��
����� PR Conditions in the Frequency Domain � � � � � � � � � � � � � � ��
����� PR Conditions in the Polyphase Domain � � � � � � � � � � � � � � ��
����� PR Conditions in the Dual Polyphase Domain � � � � � � � � � � � �
��� Frame�Theoretic Analysis � � � � � � � � � � � � � � � � � � � � � � � � � � �
���� Relations between CMFBs and DFT FBs � � � � � � � � � � � � � � �
����� Paraunitarity Conditions � � � � � � � � � � � � � � � � � � � � � � � �
����� Time�Limited Prototype � � � � � � � � � � � � � � � � � � � � � � � �
����� Band�Limited Prototype � � � � � � � � � � � � � � � � � � � � � � � �
����� Integer Oversampling � � � � � � � � � � � � � � � � � � � � � � � � � �
xiv

����� Construction of Paraunitary Prototypes � � � � � � � � � � � � � � �
��� Design Methods � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
���� Design via Constrained Optimization � � � � � � � � � � � � � � � � �
����� Linearized Design Method � � � � � � � � � � � � � � � � � � � � � � �
����� Lattice Design � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
��� E�cient Implementation � � � � � � � � � � � � � � � � � � � � � � � � � � �
���� Implementation of Even�Stacked CMFBs � � � � � � � � � � � � � �
����� Implementation of Odd�Stacked CMFBs � � � � � � � � � � � � � � �
����� General Oversampling � � � � � � � � � � � � � � � � � � � � � � � � �
�� Image Coding with Even�Stacked CMFBs � � � � � � � � � � � � � � � � � �
�� � Subband Image Coder Based on Even�Stacked CMFBs � � � � � � �
�� �� Simulation Results � � � � � � � � � � � � � � � � � � � � � � � � � �
� Noise Analysis ���
�� Noise Analysis and Design Freedom � � � � � � � � � � � � � � � � � � � � � ��
��� A�D Conversion as a Frame Expansion � � � � � � � � � � � � � � � ��
���� Design Freedom in Oversampled A�D Conversion � � � � � � � � � ��
���� Noise Analysis in Oversampled A�D Conversion � � � � � � � � � � ��
��� Noise Analysis and Design Freedom � � � � � � � � � � � � � � � � � � � � � �
���� Noise Analysis for Oversampled Filter Banks � � � � � � � � � � � � �
����� Noise Reduction Versus Design Freedom in Filter Banks � � � � � �
Oversampled Predictive Subband Coders ���
�� Oversampled Predictive A�D Converters � � � � � � � � � � � � � � � � � �
��� Noise Predictive �Noise Shaping� Coders � � � � � � � � � � � � � �
���� Signal Predictive Coders � � � � � � � � � � � � � � � � � � � � � � � ��
��� Oversampled Predictive Subband Coders � � � � � � � � � � � � � � � � � � ��
���� Noise Predictive �Noise Shaping� Subband Coders � � � � � � � � � ��
����� Signal Predictive Subband Coders � � � � � � � � � � � � � � � � � � �
� Conclusion ���
A The Theory of Frames ���
A� Motivation and De�nition of Frames � � � � � � � � � � � � � � � � � � � � ��
A�� The Frame Operator � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
A�� The Dual Frame � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
A�� Signal Expansions � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
A�� Exact Frames and Biorthogonality � � � � � � � � � � � � � � � � � � � � � � ��
A�� Frames and Bases � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � ��
A�� Transformation of Frames � � � � � � � � � � � � � � � � � � � � � � � � � � ��
xv

A� Frames and Pseudoinverses � � � � � � � � � � � � � � � � � � � � � � � � � � �
A� Frames and the Gram Matrix � � � � � � � � � � � � � � � � � � � � � � � �
A�� Examples � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � � �
B Multi�Channel Levinson Algorithm � �
xvi

Chapter �
Introduction and Outline of the
Thesis
��� Introduction
Many modern data compression schemes are based on signal decompositions or �lter
banks �FBs� �� �� �� �� �� �� ��� The aim of signal decompositions is to perform a
decorrelation� which means that the expansion coe�cients are uncorrelated or� in prac�
tice� nearly uncorrelated� Such a decorrelation is equivalent to a diagonalization of the
signal�s autocovariance matrix ���� Exact diagonalization is achieved by the Karhunen�
Lo�eve transform �KLT�� However� the KLT is often impractical since the basis functions
depend on the signal� Furthermore� in general the KLT cannot be implemented e��
ciently� since there is no structure in the KLT basis functions�
A reasonable alternative to the KLT is given by transforms that come close to the
KLT in the sense that they perform an approximate diagonalization of the signal�s
autocovariance matrix� In general� so�called unstructured transforms �like the KLT
itself� � � will perform better in decorrelating a signal than structured transforms� A
structured transform is a transform with basis functions generated from a single or
several �prototypes� according to some speci�c rule� Structured transforms can be
implemented very e�ciently by exploiting the structure inherent in the transform� A
popular structured transform is the wavelet transform� where the basis functions are
obtained by time�shifts and time�scalings of a single mother wavelet �� �� �� ��� Other
structured transforms are for example Gabor expansions �� �� �� �� �� �� �� ��
Wilson expansions �� ��� �� ��� ���� and local cosine bases ���� ��� Gabor expansions
provide decompositions of a signal into time�shifted and complex modulated versions
of a prototype function� whereas Wilson expansions provide decompositions into time�
shifted and cosine �sine� modulated versions of a prototype function� Local cosine bases
are generalizations of Wilson bases in the sense that prototype functions with varying

� CHAPTER �� INTRODUCTION AND OUTLINE OF THE THESIS
widths are used�
An important class of structured signal expansions known as shift�invariant expan�
sions ���� ��� ��� corresponds to uniform �lter banks �FBs� �� �� �� �� �� ��� A uniform
FB provides a decomposition of a signal into time�shifted versions of a set of generating
functions �prototypes�� which are the impulse responses of the synthesis �lters� If we
impose a modulation structure on the generating functions� i�e�� the generating func�
tions are derived from a single prototype function by complex or real modulations� we
may end up with a Gabor or with a Wilson expansion� respectively� As a di�erence to
uniform FBs� tree�structured FBs provide wavelet expansions ���� Well known signal
compression standards such as MUSICAM for audio �� �� JPEG for images ���� and
MPEG for video ���� are based on FBs� Another advantage of the use of FBs is that
quantization errors can be distributed in the transform domain �which is related to the
frequency domain� such that they match perceptual criterions ��� ��� For example� in
speech coding the masking e�ect between frequency bands can be exploited ��� ���
Most of the schemes discussed above are based on orthogonal or biorthogonal signal
expansions or critically sampled FBs� In such decompositions the basis functions are
linearly independent and hence there is no redundancy in the transform coe�cients�
Redundant signal expansions ���� �� ��� ��� and oversampled FBs ���� ��� ��� did not
receive much attention so far�
In this thesis� we shall study redundant shift�invariant signal expansions or equiv�
alently oversampled uniform FBs� It is well known that the use of redundancy in
engineering systems improves robustness and numerical stability� Besides that� we will
also show that oversampled FBs o�er more design freedom than critically sampled FBs
and consequently better �lters can be designed in the oversampled case ���� � � ��� ���
The increased design freedom is due to the facts that for a given oversampled anal�
ysis FB the corresponding synthesis FB is not uniquely determined� and that perfect
reconstruction can be satis�ed with fewer side constraints�
We shall furthermore show that oversampled FBs o�er the possibility of noise re�
duction ���� ��� � � ���� We introduce oversampled predictive subband coders and we
compare the rate�distortion performance of redundant expansions with that of orthog�
onal or critically sampled expansions� The noise reducing properties of oversampled
FBs are of particular importance in applications where the resolution of the quantizers
in the subbands is low� In this case� oversampling and predictive quantization im�
prove the e�ective resolution of the subband coder� The practical advantages of using
low�resolution quantizers at the cost of increased sample rate are indicated by the pop�
ular sigma�delta techniques ��� ��� ���� Using low�resolution quantizers in the digital
domain increases circuit speed and reduces circuit complexity�
Since these advantages of oversampled FBs come at the expense of increased com�
putational cost� we shall devote a major part of this thesis to oversampled modulated

���� OUTLINE �
�complex or real� FBs ���� �� ��� ���� This class of FBs allows e�cient FFT�based or
DCT�DST�based implementations and is therefore of great practical interest� Besides
that� we introduce the new class of �even�stacked� oversampled cosine modulated FBs
that allows both perfect reconstruction and linear phase �lters in all channels ��� ����
Linear phase �lters are of particular importance in image coding since nonlinear phase
�lters lead to undesirable artifacts in the reconstructed image if the subband signals are
quantized ���� � �� We furthermore propose a complete subband image coding scheme
based on even�stacked cosine modulated FBs�
Further applications of redundant representations or oversampled FBs include�
� Denoising of signals ���
� Oversampled A�D conversion ���
� Singularity detection and processing ����
� Speech enhancement ���
� Image interpolation ���� ���
� Multicarrier transmission ����
��� Outline
We shall next outline the organization of the thesis�
Oversampled �lter banks and frames �Chapter ��� In this chapter we develop
the relation between oversampled FBs and frame expansions ���� ��� ���� The use of
frame theory is motivated by the fact that oversampled FBs correspond to redundant
signal expansions for which frame theory is an appropriate mathematical framework�
We show that the polyphase matrix and the alias�component matrix provide matrix
representations of the frame operator ���� ���� This fundamental result allows an ef�
�cient frame�theoretic analysis of oversampled FIR and IIR FBs� We show that the
frame bounds of a FB can be obtained by an eigenanalysis of the polyphase matrices�
We formulate necessary and su�cient conditions for a FB to correspond to a frame ex�
pansion� We furthermore provide time� frequency� and polyphase domain parameteriza�
tions of all synthesis FBs providing perfect reconstruction �PR� for a given oversampled
analysis FB� Finally� simulation results demonstrating the bene�ts of oversampling are
presented�
Oversampled DFT �lter banks �Chapter ��� Oversampled DFT FBs correspond
to Weyl�Heisenberg expansions �Gabor expansions� or� equivalently� discrete short�time
Fourier transforms� Although the connection between DFT FBs and short�time Fourier
� CHAPTER �� INTRODUCTION AND OUTLINE OF THE THESIS
transforms �or Gabor expansions� is well known� a frame�theoretic approach to over�
sampled DFT FBs leads to a number of new insights and results ���� ���� The results of
Chapter � are specialized to oversampled DFT FBs� The case of integer oversampling
is discussed in detail and a new procedure for the construction of oversampled parauni�
tary DFT FBs is introduced� Finally� we provide simulation results demonstrating the
increased design freedom in oversampled DFT FBs�
Oversampled cosine modulated �lter banks �Chapter �� Oversampled cosine
modulated FBs �CMFBs� allow an e�cient DCT�DST�based implementation� In prac�
tice� CMFBs are often preferred over DFT FBs since in a CMFB the subband signals are
real�valued if the input signal and the analysis prototype are real�valued� We introduce
two types of oversampled CMFBs ��� ��� ���� thereby extending a classi�cation recently
proposed by R� Gopinath for critically sampled CMFBs� The �odd�stacked� CMFBs
extend the traditional CMFB type ��class B CMFBs� ����� to the oversampled case�
�Even�stacked� CMFBs extend the �class A CMFBs� recently introduced for critical
sampling by Gopinath ���� to the oversampled case� Even�stacked CMFBs are attrac�
tive since they allow both PR�paraunitarity and linear phase �lters in all channels� The
linear phase property is of particular interest for image coding applications� We propose
a new subband image coding scheme based on even�stacked CMFBs� It is demonstrated
that the proposed subband image coder outperforms existing subband coders based on
nonlinear phase CMFBs from a perceptual point of view� We furthermore show that
odd� and even�stacked CMFBs are closely related to odd� and even�stacked DFT FBs
with twice the oversampling factor� We provide perfect reconstruction and paraunitar�
ity conditions for oversampled CMFBs� and we discuss design methods and the e�cient
implementation of oversampled CMFBs ��� ����
Noise analysis �Chapter ��� In this chapter� we present a subspace�based noise
analysis for oversampled FBs �� � ���� We derive bounds on the variance of the recon�
struction error caused by noisy subband signals� and we discuss the dependence of the
error on the oversampling factor� A signal space interpretation of noise reduction is
given� and the minimum norm synthesis FB is shown to minimize the reconstruction
error in the case of white uncorrelated noise� We show that there is a fundamental
tradeo� between noise reduction and design freedom �� � ���� Speci�cally� in many
cases the minimum norm synthesis FB �which for white uncorrelated noise minimizes
the variance of the reconstruction error� does not have desirable properties such as good
frequency selectivity� On the other hand� other PR synthesis FBs which may have these
desirable properties lead to a larger error variance�
Oversampled predictive subband coders �Chapter �� This chapter introduces
two types of oversampled predictive subband coders� namely� oversampled noise shaping
and oversampled linear predictive subband coders �� � ���� Motivated by a new signal
���� OUTLINE �
space interpretation of noise shaping in oversampled A�D conversion� we establish a
framework for oversampled noise shaping and linear predictive subband coders� We
show that considerable noise reduction can be achieved by using predictive quantiza�
tion in oversampled FBs �� � ���� The proposed subband coders generalize oversampled
predictive A�D converters and exploit both interchannel �cross�channel� and intrachan�
nel redundancy� For a given oversampled FB and given noise and signal statistics� we
derive the optimal noise shaping system and the optimal linear prediction system� It
is shown that exploiting interchannel redundancy leads to signi�cant improvements in
coder performance�
The coder structures discussed in this chapter are speci�cally attractive for subband
coding applications where the resolution of the quantizers in the subbands is low� In
this case� oversampling combined with noise shaping or prediction improves the e�ective
coder resolution� Noise shaping and linear prediction in oversampled FBs can be viewed
as techniques to exploit �or remove� the redundancy introduced by oversampling� An�
other technique to remove this redundancy is entropy coding �e�g� Hu�man coding��
We present coding examples based on oversampled FBs using noise shaping or linear
prediction and subsequent entropy coding� and we perform an experimental error�rate
analysis that provides insights into the error�rate performance of oversampled FBs�
Conclusion �Chapter ��� This chapter provides concluding remarks�
The theory of frames �Appendix A�� This appendix provides an introduction
to frame theory which provides a mathematical basis for Chapters ���� We discuss the
basics of frame theory and we give detailed proofs of the most important theorems of
frame theory�
Multi�channel Levinson algorithm �Appendix B�� This appendix gives a de�
tailed derivation of the multi�channel Levinson algorithm that permits an e�cient cal�
culation of the optimum noise shaping and optimum prediction systems discussed in
Chapter ��
We conclude this outline by providing a summary of what we consider the most
important contributions of the thesis�
� Frame�theoretic study of oversampled FBs based on a matrix representation of
the underlying frame operator �Chapter ���
� Parameterization of all synthesis FBs providing perfect reconstruction for a given
oversampled analysis FB �Chapter ���
� Application of the theory of Weyl�Heisenberg frames to oversampled DFT FBs
�Chapter ���
� CHAPTER �� INTRODUCTION AND OUTLINE OF THE THESIS
� Analysis and design of two classes of oversampled cosine modulated �lter banks
�Chapter ���
� Fundamental relationship between cosine�modulated �lter banks and DFT FBs
with twice the oversampling factor �Chapter ���
� Image coding scheme based on the new class of even�stacked cosine modulated
�lter banks �Chapter ���
� Noise analysis of oversampled FBs �Chapter ���
� Tradeo� between noise reduction and design freedom in oversampled FBs �Chap�
ter ���
� Noise shaping subband coders using oversampled FBs �Chapter ���
� Oversampled signal predictive subband coders with cross�channel prediction
�Chapter ���
Chapter �
Oversampled Filter Banks and
Frames
Uniform �lter banks �FBs��� i�e�� �lter banks with the same integer decimation factor
in each channel �� �� �� �� �� ��� correspond to a class of discrete�time signal expansions
known as shift�invariant expansions ���� ��� ���� The relation between discrete�time
signal expansions and maximally decimated �or critically sampled� FBs has been studied
in ���� �� � � ��� It has also been recognized that oversampled FBs ��� �� ��� ��
correspond to redundant signal expansions ��� ��� ��� ��� ��� ��� ���� In ���� ��� ��� ���
��� ���� the use of the theory of frames ���� ��� �� for the study of oversampled FBs
has been proposed� In ���� ��� ���� oversampled FIR FBs have been studied using the
theory of polynomial matrices ��� ��� ���� A vector��lter framework for the study of
oversampled FIR FBs has been proposed in �����
In this chapter� we introduce a new frame�theoretic approach for the study of over�
sampled FIR and IIR FBs� Our approach is based on an extension of the Zibulski�Zeevi
method for the study of continuous�time Gabor frames ��� � �� Speci�cally� we show
that the polyphase matrices and the alias component matrices provide matrix repre�
sentations of the frame operator corresponding to a frame generated by a FB ���� ����
Our approach is more general than those presented in ���� ��� since it allows to treat
both FIR and IIR FBs and it leads to several further original results that include
� a compact parameterization of all synthesis FBs providing perfect reconstruction
�PR� for a given oversampled analysis FB�
� methods for estimating the frame bounds� constructing paraunitary FBs from
non�paraunitary FBs� and approximately calculating PR synthesis FBs�
� a sensitivity analysis for oversampled FBs involving the frame bounds�
�For the sake of brevity� we shall use the term �lter bank �FB� instead of uniform �lter bank�
�
CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
We shall now summarize our main results and outline the organization of this chap�
ter� Section �� brie�y reviews oversampled FBs� introduces uniform �lter bank frames
�UFBFs�� and establishes the connection between frames and oversampled FBs� We
show that the polyphase matrices and the alias component matrices provide matrix
representations of the frame operator� We furthermore show that the frame bounds
can be obtained by an eigenanalysis of the polyphase matrices or the alias component
matrices �the importance of the frame bounds of a FB is discussed in Chapter ��� We
furthermore outline an approach for the approximative calculation of the frame bounds
of a FB�
In Section ���� we formulate necessary and su�cient conditions for an oversampled
FB to provide PR� We discuss the minimum norm synthesis FB and its approximative
construction� We formulate necessary and su�cient conditions for a FB to provide a
UFBF expansion�
In Section ���� we show that oversampled paraunitary FBs correspond to tight UFBFs�
and we propose a new method for constructing paraunitary FBs from given nonpara�
unitary FBs�
Section ��� considers important special cases where the calculation of the minimum
norm synthesis FB and the frame bounds is simpli�ed� Important examples of such
FBs are integer oversampled DFT FBs� �bandlimited� FBs� nondecimated FBs� and
redundant block transforms�
Oversampled FIR FBs are a special case of the theory presented in this Chapter�
In the FIR case the polyphase matrices are polynomial matrices� which has several
interesting consequences to be discussed in Section ���� For the sake of completeness
we review some of the results on oversampled FIR FBs presented in ����� We also
present original results and extensions of the results presented in �����
Finally� simulation results are presented in Section ����
��� Oversampled Filter Banks
In this section� we brie�y discuss oversampled FBs and the polyphase approach proposed
in �� �� �� �� �� �� for maximally decimated �critically sampled� FBs and in ���� ��� ��� for
oversampled FBs� We furthermore introduce UFBFs� the type of frames corresponding
to uniform FBs�
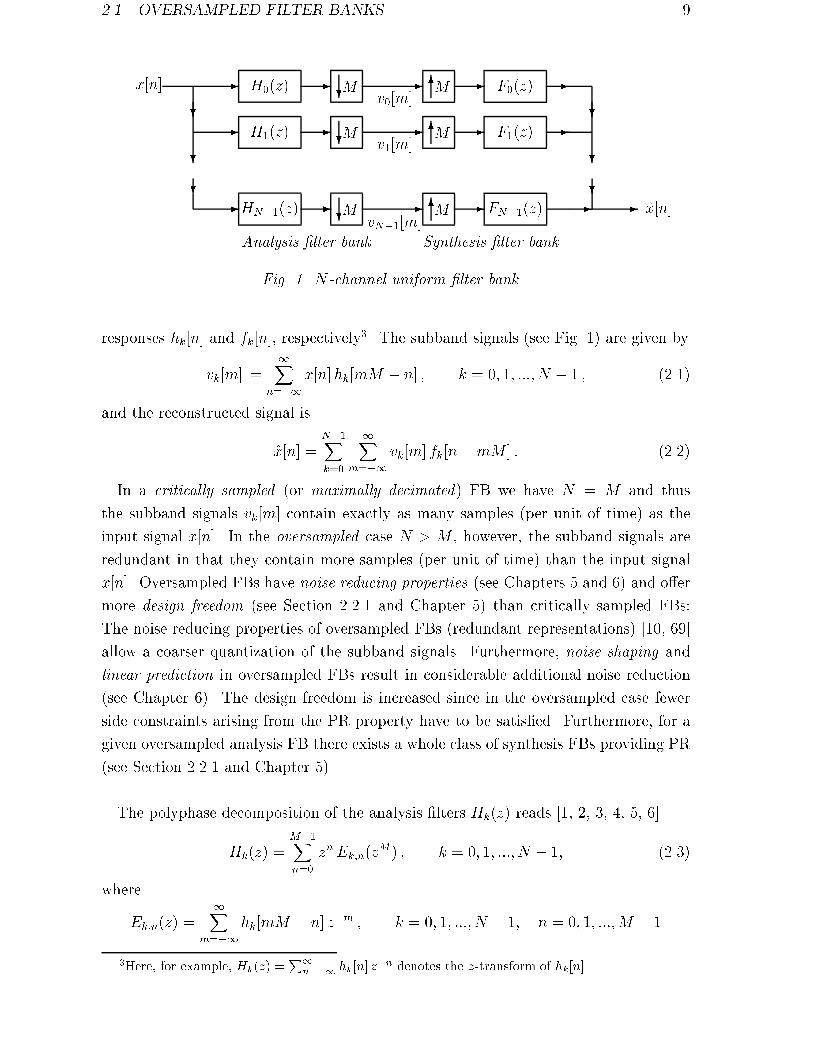
We consider an N �channel FB �see Fig� � with subsampling by the integer factor M
in each channel� PR and zero delay�� so that x�n� ! x�n� where x�n� and x�n� denote the
input and reconstructed signal� respectively� The transfer functions of the analysis and
synthesis �lters are Hk�z� and Fk�z� �k ! �� � ���� N � �� with corresponding impulse
�We note that our theory can easily be extended to PR with nonzero delay�
���� OVERSAMPLED FILTER BANKS
� �� �
v��m�
v��m�
vN���m��HN���z�
Analysis �lter bank
� M��
�
�F��z��M�
M� � F��z� �
�
�
M
�
� � FN���z� x�n�
Synthesis �lter bank
��
�
��
��H��z�x�n� M
�
� H��z� � M�
�
Fig� �� N�channel uniform �lter bank�
responses hk�n� and fk�n�� respectively�� The subband signals �see Fig� � are given by
vk�m� !�X
n���x�n� hk�mM � n� � k ! �� � ���� N � � ����
and the reconstructed signal is
x�n� !N��Xk��
�Xm���
vk�m� fk�n�mM � � �����
In a critically sampled �or maximally decimated� FB we have N ! M and thus
the subband signals vk�m� contain exactly as many samples �per unit of time� as the
input signal x�n�� In the oversampled case N � M � however� the subband signals are
redundant in that they contain more samples �per unit of time� than the input signal
x�n�� Oversampled FBs have noise reducing properties �see Chapters � and �� and o�er
more design freedom �see Section ���� and Chapter �� than critically sampled FBs�
The noise reducing properties of oversampled FBs �redundant representations� ��� ��
allow a coarser quantization of the subband signals� Furthermore� noise shaping and
linear prediction in oversampled FBs result in considerable additional noise reduction
�see Chapter ��� The design freedom is increased since in the oversampled case fewer
side constraints arising from the PR property have to be satis�ed� Furthermore� for a
given oversampled analysis FB there exists a whole class of synthesis FBs providing PR
�see Section ���� and Chapter ���
The polyphase decomposition of the analysis �lters Hk�z� reads �� �� �� �� �� ��
Hk�z� !M��Xn��
znEk�n�zM� � k ! �� � ���� N � � �����
where
Ek�n�z� !�X
m���hk�mM � n� z�m � k ! �� � ���� N � � n ! �� � ����M �
�Here� for example� Hk�z� �P�
n��� hk�n� z�n denotes the ztransform of hk�n��

� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
is the nth polyphase component of the kth analysis �lter Hk�z�� The N �M analysis
polyphase matrix is de�ned as
E�z� !
��������
E����z� E����z� ��� E��M���z�
E����z� E����z� ��� E��M���z����
������
EN�����z� EN�����z� ��� EN���M���z�
�������� �
The synthesis �lters Fk�z� can be similarly decomposed�
Fk�z� !M��Xn��
z�nRk�n�zM � � k ! �� � ���� N � � �����
with the synthesis polyphase components
Rk�n�z� !�X
m���fk�mM " n� z�m � k ! �� � ���� N � � n ! �� � ����M � �
The M �N synthesis polyphase matrix is de�ned as
R�z� !
��������
R����z� R����z� ��� RN�����z�
R����z� R����z� ��� RN�����z����
������
R��M���z� R��M���z� ��� RN���M���z�
�������� �
����� Oversampled Filter Banks and Redundant Signal Expan�
sions
FB analysis and synthesis can be interpreted as a signal expansion ��� �� ���� The
subband signals in ���� can be written as the inner products�
vk�m� ! hx� hk�mi with hk�m�n� ! h�k�mM � n� � k ! �� � ���� N � � �����
where � stands for complex conjugation� Furthermore� with ����� and the PR property�
we have
x�n� ! x�n� !N��Xk��
�Xm���
hx� hk�mi fk�m�n� with fk�m�n� ! fk�n�mM � �
This shows that the FB corresponds to an expansion of the input signal x�n� into the
function set ffk�m�n�g with k ! �� � ���� N � and �� � m � �� In general the set
ffk�m�n�g is not orthogonal� so that the expansion coe�cients� i�e�� the subband signal
samples vk�m� ! hx� hk�mi� are obtained by projecting the signal x�n� onto a �dual�
��x� y�P�
n��� x�n� y��n� denotes the inner product of the signals x�n� and y�n��

���� OVERSAMPLED FILTER BANKS
set of functions fhk�m�n�g� Critically sampled FBs provide orthogonal or biorthogonal
signal expansions ���� �see Appendix A� Secs� A�� and A���� whereas oversampled FBs
correspond to redundant �overcomplete� expansions ��� ��� ��� ��� ��� ����
Following the discussion in Appendix A we shall now establish the relation between
FBs and frames in� l��ZZ�� The set fgk�n�g �k � K� de�ned in Appendix A is now given
by the set of analysis functions� fhk�m�n�g� In a FB� the linear operator T �cf� Section
A�� referred to as analysis operator in the following maps the input signal x�n� � l��ZZ�
into the subband signal space �l��ZZ��N � We have
T � x� vk�m� ! hx� hk�mi or equivalently �Tx�k�m ! vk�m� ! hx� hk�mi� �����
We shall next motivate the requirements on hk�m�n� and� equivalently� the operator T
from a FB point of view�
� The FB should satisfy the PR property� This means that for a given analysis FB
a synthesis FB providing PR exists� Note that this requirement is equivalent to
the requirement that the operator T has a left inverse� i�e�� it is invertible on its
range� This means that the signal x�n� can be perfectly reconstructed from the
expansion coe�cients hx� hk�mi�
� We would like to have �nite�energy subband signals if the input signal x�n� has ��
nite energy� In order to meet this requirement the operator T has to be continuous
and hence bounded�
� Another important requirement is numerical stability of the FB in the sense that
small perturbations of the subband signals �caused e�g� by quantization or some
other modi�cation� result in small perturbations of the output signal� Therefore�
the left�inverse T�� has to be continuous and hence bounded�
Combining all three requirements we get the frame condition �cf� Section A��
Akxk� �N��Xk��
�Xm���
jhx� hk�mij� � Bkxk� � x�n� � l��ZZ� �����
with the frame bounds A � � and B ���
De�nition ���� A function set fhk�m�n�g de�ned as in ����� satisfying �����
will be called uniform �lter bank frame �UFBF��
�Here l��ZZ� denotes the space of squaresummable sequences��Note that here we have an indexing that is dierent from that in Appendix A� namely the index
k �k � K� from Appendix A becomes the double index �k�m�� where k � �� �� ���� N � � and �� �
m ��� Here k identi es the subband �channel� while m denotes the time index��The range of a linear operator T � X � Y is Ran�T �� fy j y � Txwith x � Xg�

� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
Note that according to ������ the UFBF functions hk�m�n� are generated by uniformly
time�shifting the N analysis �lter impulse responses h�k��n�� i�e�� hk�m�n� ! h�k�mM�n��In the mathematical literature such function sets are known as shift�invariant function
sets ���� ��� ����
For analysis �lters hk�n� such that fhk�m�n�g is a UFBF for l��ZZ�� the dual frame
�cf� Section A��� is given by ���� ��
fk�m�n� ! �S��hk�m��n� � ��� �
Here� S�� is the inverse of the frame operator de�ned as
�Sx��n� ! �T �Tx��n� !N��Xk��
�Xm���
hx� hk�mihk�m�n� � ����
where the adjoint operator T � is de�ned by �T �v��n� !PN��
k��
P�m��� vk�m�hk�m�n��
Always assuming that fhk�m�n�g is a frame� the frame operator is a linear� positive
de�nite� self�adjoint operator mapping l��ZZ� onto l��ZZ� ����� Using the frame operator�
Eq� ����� can be written as
Akxk� � hSx� xi � Bkxk��
Finally� the operator �T �cf� Section A��� is given by
�T � x � hx� fk�mi or equivalently � �Tx�k�m ! hx� fk�mi �����
with its adjoint �T�de�ned as
� �T�v��n� !
N��Xk��
�Xm���
vk�m�fk�m�n��
If the analysis set fhk�m�n�g is a frame� then the synthesis set ffk�m�n�g de�ned by
��� � is also a frame �the �dual� frame�� with frame bounds A� ! �B and B� ! �A�
We note that the dual frame ffk�m�n�g is a special synthesis set that provides PR� The
following theorem states that if fhk�m�n�g is a UFBF� then the dual frame ffk�m�n�g is
again a UFBF� i�e�� it is generated by uniformly time�shifting a dual set of functions
fk�n��
Theorem ���� If fhk�m�n�g is a UFBF with parameters M and N � then the
dual frame ffk�m�n�g is again a UFBF with the same parameters M and N �
i�e��
fk�m�n� ! fk�n�mM �� k ! �� � ���� N � �
where
fk�n� ! �S��hyk��n� with hyk�n� ! h�k��n�� ����

���� OVERSAMPLED FILTER BANKS �
Proof� Introducing the unitary time�shift operator Am as �Am x��n� ! x�n � mM ��
we can write
hk�m�n� ! �Amhyk��n��
Using AmAm� ! Amm� and A�m!A�m �with A�
m denoting the adjoint of Am�� it is
easily shown that both the frame operator S and its inverse S�� commute with the
time�shift operator Am� i�e�� AmS ! SAm and AmS�� ! S
��Am� We then obtain
fk�m�n� ! �S��hk�m��n� ! �S��Am hyk��n� ! �AmS��hyk��n� ! �Am fk��n� ! fk�n�mM ��
which concludes the proof� �
A frame is called snug if B��A� ! B�A and tight if B��A� ! B�A ! �see
De�nition A���� For a tight frame we have S ! A I �where I is the identity operator
on l��ZZ�� and hence there is simply fk�n� !�Ah�k��n�� According to Theorem A�� the
signal x�n� can be expressed as
x�n� !N��Xk��
�Xm���
hx� fk�mihk�m�n� !N��Xk��
�Xm���
hx� hk�mi fk�m�n�� �����
This can equivalently be written as
N��Xk��
�Xm���
hk�m�n� f�k�m�n
�� !N��Xk��
�Xm���
fk�m�n� h�k�m�n
�� ! ��n� n���
����� Frame Operator and Polyphase Matrices
We shall now further establish the connection between FBs and UFBFs by showing
that the analysis operator T � the synthesis operator �T�� and the frame operator S
can be expressed in terms of the polyphase matrices of the corresponding FB� This
result extends a similar result on continuous�time Weyl�Heisenberg frames ��� � � and
can therefore be seen as a generalization of the Zibulski�Zeevi representation for Weyl�
Heisenberg frame operators to shift�invariant systems�
We shall �rst show how the frame operator S can be expressed in terms of the
polyphase matrices�
Theorem ���� Let y�n� ! �Sx��n� and x�n� ! �S��y��n�� where S is the
frame operator corresponding to a UFBF� Then� the polyphase components
Yn�z� !P�
m��� y�mM " n� z�m of Y �z� and the polyphase components
Xn��z� !P�
m��� x�mM " n�� z�m of X�z� are related as�
Yn�z� !M��Xn���
Sn�n��z�Xn��z� with Sn�n��z� !N��Xk��
#Ek�n�z�Ek�n��z� ������
Xn��z� !M��Xn��
S��n��n�z�Yn�z� with S��n��n�z� !N��Xk��
Rk�n��z� #Rk�n�z� ������
Here� for example� �Ek�n�z� � E�k�n���z���

� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
or equivalently� using the polyphase vectors�
x�z� ! �X��z� X��z� ��� XM���z��T and y�z� ! �Y��z� Y��z� ��� YM���z��T �
y�z� ! S�z�x�z� with S�z� ! #E�z�E�z� � �����
x�z� ! S���z�y�z� with S���z� ! R�z� #R�z� � �����
Proof� With ����� the signal y�n� ! �Sx��n� can be written as
y�n� !N��Xk��
�Xm���
�Xr���
x�r� hk�mM � r�
�h�k�mM � n��
The nth polyphase component of y�n� is given by
Yn�z� !�X
l���
N��Xk��
�Xm���
�Xr���
x�r� hk�mM � r� h�k�mM � n� lM �
�z�l
!�X
l����
N��Xk��
�Xm���
M��Xr���
�Xr����
x�r� " r�M � hk�mM � r� � r�M � h�k�l�M � n� z�mzl
�
!M��Xn���
N��Xk��
�Xm���
hk�mM � n��z�m�X
l���h�k�lM � n�zl
�Xr����
x�n� " r�M �z�r�
!M��Xn���
Xn��z�N��Xk��
Ek�n��z� #Ek�n�z��
which establishes Eq� ������ Eq� ����� can be shown in an analogous manner� �
Thus� the frame operator S is expressed in the polyphase domain by the M �M
UFBF matrix S�z� ! #E�z�E�z� de�ned in terms of the analysis polyphase matrix
E�z�� Similarly� the inverse frame operator S�� is expressed in the polyphase domain
by the M � M inverse UFBF matrix S���z� ! R�z� #R�z� de�ned in terms of the
synthesis polyphase matrix R�z��
Specializing to the unit circle �z ! ej����� we now show that the polyphase matrices
E�ej���� and R�ej���� provide matrix representations ��� of the frame operator S and
the inverse frame operator S��� respectively� Much of our subsequent discussion of FBs
will be based on these matrix representations�
Corollary ���� The positive de�nite M �M matrices
S�ej���� ! EH�ej����E�ej���� and S���ej���� ! R�ej����RH�ej����
are the matrix representations of the frame operator S and the inverse
frame operator S��� respectively� with respect to the basis fen���n��g of l��ZZ�Here� �E�z� � E
H���z�� with the superscript H denoting the conjugate transpose is the paracon
jugate of E�z��

���� OVERSAMPLED FILTER BANKS �
given by�� en���n�� !
P�m��� ��n��n�mM � ej��
�M n��n� �n ! �� � ����M � �
� � � � ��
Proof� Using Xn�ej���� ! hx� en��i� it follows from ����� that
hSx� en��i !M��Xn���
Sn�n��ej���� hx� en���i �
This show that S�ej���� ! EH�ej����E�ej���� is the matrix representation of S with
respect to the basis en���n��� The positive de�niteness of S�ej���� follows from the pos�
itive de�niteness of S� In a similar manner� it follows from ����� that S���ej���� !
R�ej����RH�ej���� is the matrix representation of S��� �
According to ������ the analysis operator T maps the input signal x�n� into the
subband signals vk�m�� Transforming ���� into the z�transform domain yields
v�z� ! E�z�x�z� �
where v�z� !P�
m��� v�m� z�m with v�m� ! �v��m� v��m� ��� vN���m��T and x�z� !
�X��z� X��z� ��� XM���z��T � Thus� the analysis polyphase matrix E�z� provides a
polyphase domain representation of the analysis operator T � Comparing S ! T�T
with S�z� ! #E�z�E�z�� it is furthermore clear that the adjoint analysis operator T � is
represented by the paraconjugate #E�z��
In a similar manner� transforming ����� into the z�transform domain yields
x�z� ! R�z�v�z��
where x�z� ! � X��z� X��z� ��� XM���z��T with Xn�z� !P�
m��� x�mM " n� z�m� This
shows that the synthesis operator �T�is represented in the polyphase domain by the
synthesis polyphase matrix R�z��
An important consequence of Corollary �� is the identity of the eigenvalues of the
frame operator with the eigenvalues of its matrix representation� the UFBF matrix�
Corollary ���� Let n��� � � with n ! �� � ����M � denote the eigen�
values of the UFBF matrix S�ej���� ! EH�ej����E�ej����� de�ned by the
eigenequation
S�ej����vn��� ! n���vn��� � n ! �� � ����M � � � � � � �
Any eigenvalue n��� is simultaneously an eigenvalue of the frame opera�
tor S� Conversely� any eigenvalue of S is simultaneously an eigenvalue of
S�ej�����
��This basis induces the polyphase representation on the unit circle��x� en��
� Xn�e
j���� �P�m��� x�mM � n� e�j���m� Equivalently� this is the Zak transform of x�n� ���� ��� ��� ����

� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
Proof� Using ������ it can easily be shown that S!Z��S�ej����Z� where Z denotes
the polyphase transform operator� i�e�� the operator mapping a signal x�n� onto its
polyphase transform with z ! ej���� Xn�ej����� Since Z is an isometric isomorphism
����� it follows that S and S�ej���� are unitarily equivalent ���� Therefore� S and
S�ej���� have the same eigenvalues ���� �
It follows that the eigenanalysis of the frame operator S �a matrix of in�nite size� is
equivalent to that of the UFBF matrix S�ej���� �an M �M matrix indexed by a real�
valued parameter � � ��� ��� Similarly� the eigenvalues of the inverse frame operator
S�� are equal to those of the inverse UFBF matrix S���ej���� ! R�ej����RH�ej�����
which will be denoted �n��� in the following� Since S�ej���� and S���ej���� are positive
de�nite matrices� their eigenvalues are positive� This result is important� since it allows
to reduce the eigenanalysis of the operator S� which is a matrix of in�nite size� to the
eigenanalysis of the M � M matrix S�ej����� However� the matrix S�ej���� depends
on the parameter � � ��� �� This means that one has to perform an eigenanalysis of
S�ej���� for � � ��� �� which of course is not possible in practice� One can resort to the
pragmatic approach of performing an eigenanalysis of S�ej��lL � for l ! �� � ���� L � �
However� this discretization approach will in general not give the exact eigenvalues�
In Section ���� we shall discuss situations where the frame bounds can be calculated
without performing an explicit eigenanalysis�
����� Frame Bounds
Important numerical properties of the UFBF fhk�m�n�g� and thus also of the associated
FB� are determined by its frame bounds A and B or� equivalently� A� ! �B and
B� ! �A ���� With ������ the subband signals vk�m� ! hx� hk�mi of a FB providing a
UFBF expansion satisfy �see De�nition A���
Akxk� �N��Xk��
�Xm���
jvk�m�j� � Bkxk� � x�n� � l��ZZ� �����
with � � A � B � �� This double inequality generalizes the well�known energy
conservation equationPN��
k��
P�m��� jvk�m�j� ! kxk� in orthogonal FBs ����� which is
reobtained for A ! B ! � For A ! B we havePN��
k��
P�m��� jvk�m�j� ! A kxk�� i�e��
energy conservation up to a constant factor A� Note that ����� shows that the subband
signals vk�m� are in �l��ZZ��N if the input signal x�n� is in l��ZZ�� Since the frame bounds
describe important numerical properties of a FB �see Section ������ their calculation is
of interest� The next theorem states that the frame bounds follow from the eigenvalues
of the UFBF matrix�
Theorem ���� The �tightest possible� frame bounds A and B of a FB
providing a UFBF expansion are given by the essential in�mum and supre�

���� OVERSAMPLED FILTER BANKS �
mum� respectively� of the eigenvalues n��� of the UFBF matrix S�ej���� !
EH�ej����E�ej�����
A ! ess inf�� ������ n���������M��
n�ej���� � B ! ess sup
�� ������ n���������M��n�e
j���� �
Proof� It is well known ���� � �� that the �tightest possible� frame bounds A and B
are the essential in�mum and the essential supremum� respectively� of the eigenvalues of
the frame operator S �see Theorem A��� Hence� Theorem ��� follows using Corollary
���� �
Similarly� we have
A� ! ess inf�� ������ n���������M��
�n�ej���� � B� ! ess sup
�� ������ n���������M���n�e
j���� �
where �n��� are the eigenvalues of the inverse UFBF matrix S���ej���� !
R�ej����RH�ej����� Note that in practice the calculation of the frame bounds is ac�
complished by sampling the matrix S�ej���� on the unit circle and performing an eige�
nanalysis of S�ej��lL � for l ! �� � ���� L� � As already mentioned in Subsection �����
this approach will not give the exact frame bounds�
An interesting consequence of Theorem ��� is the following corollary� which has been
formulated for the FIR case in �����
Corollary ���� Let fhk�m�n�g be a UFBF for l��ZZ� with frame bounds A
and B� Then
A �
M
N��Xk��
khkk� � B� ��� �
In particular� in the case of a tight frame �where A ! B� we have
M
N��Xk��
khkk� ! A �
Proof� The trace of the UFBF matrix satis�es
Tr fS�ej����g !M��Xn��
N��Xk��
jEk�n�ej����j�
and
Tr fS�ej����g !M��Xn��
n����
so thatM��Xn��
n��� !M��Xn��
N��Xk��
jEk�n�ej����j�� ����

CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
From Theorem ��� we conclude that MA � PM��n�� n��� � MB� and� with �����
MA � PM��n��
PN��k�� jEk�n�e
j����j� � MB� Integrating both sides of this inequality
with respect to the frequency parameter � and usingPM��
n��
R �� jEk�n�e
j����j� d� ! khkk��we obtain ��� �� �
If we normalize the hk�n� such that khkk� ! for k ! �� � ���� N�� then ��� � yields
the following inequality relating the frame bounds with the oversampling factor NM�
A � N
M� B�
For a tight UFBF �corresponding to a paraunitary FB� see Section ����� it follows that
the frame bounds are equal to the oversampling factor�
A ! B !N
M�
Thus� in the latter case the frame bounds provide a measure of the frame redundancy�
In Sec� ���� we shall show that the reconstruction error variance in a FB resulting from
perturbations of the subband signals can be bounded in terms of the frame bounds�
which therefore serve as an important measure of the FB�s noise sensitivity�
��� Perfect Reconstruction and Frame Properties
In this section� we derive a PR condition for oversampled FBs� We show that� for a given
oversampled analysis FB� the synthesis FB providing PR is not uniquely determined�
and we parameterize all PR synthesis FBs for a given oversampled analysis FB� We
furthermore provide conditions for a FB to implement a UFBF expansion in l��ZZ�� The
approximative construction of the minimum norm synthesis FB is discussed� and the
reconstruction error resulting from this approximation is shown to depend on the frame
bounds� Finally� we consider the special case of critical sampling� Critically sampled
FBs have been studied in great detail in the literature �� �� �� �� �� ��� Based on
our frame�theoretic approach we provide a simple proof for the well�known fact that
critically sampled FBs provide decompositions into Riesz bases or equivalently exact
frames�
����� Perfect Reconstruction
In many applications� PR is considered a desirable property of FBs� PR is always
satis�ed by FBs corresponding to UFBF expansions� However� in the following we
consider FBs that do not necessarily correspond to UFBFs� and we will derive PR

���� PERFECT RECONSTRUCTION AND FRAME PROPERTIES
conditions in the polyphase� frequency� and time domains for arbitrary oversampling
factors�
PR condition in the polyphase domain� Transforming the FB input�output
relation x�n� !PN��
k��
P�m��� hx� hk�mi fk�m�n� into the polyphase domain yields
Xn�z� !M��Xn���
N��Xk��
Rk�n�z�Ek�n��z�
�Xn��z� � n ! �� � ����M � �
or more compactly
x�z� ! R�z�E�z�x�z��
This gives the following result�
Theorem ��� An oversampled FB satis�es the PR condition x�n� ! x�n�
if and only if
R�z�E�z� ! IM � ������
where IM is the M � M identity matrix� For E�z� given� R�z� is not
uniquely determined� any solution of ������ can be written as �assuming
rank fE�z�g ! M a�e����
R�z� ! R�z� " U�z�hIN �E�z� R�z�
i� �����
where R�z� is the para�pseudo�inverse of E�z�� which is a particular solution
of ������ de�ned as R�z� !
h#E�z�E�z�
i�� #E�z� � ������
and U�z� is an M � N matrix with arbitrary elements �U�z��k�l satisfying
j�U�ej�����k�lj ���
Proof and discussion� For critical sampling �N ! M�� E�z� and R�z� are square
�M�M� matrices and thus ������ has the unique solutionR�z� ! E���z� �� �� �� �� �� ���
In the oversampled case �N � M�� the matrices E�z� and R�z� are rectangular �N�M
and M � N � respectively�� and thus the solution of ������ is not uniquely determined�
in fact� any left�inverse of E�z� is a valid solution �such a left�inverse exists if E�z�
has full rank a�e��� It can now be shown �����p� ���� ���� that any left�inverse of E�z�
can be written in the form ������ R�z� ! R�z� " U�z�hIN �E�z� R�z�
i� where
R�z� is any particular left�inverse� which can be chosen as in ������� Indeed� using R�z�E�z� ! IM it is easily seen that R�z�E�z� ! IM � In the special case of critical
sampling �N ! M� we duly have R�z� ! R�z� ! E���z�� We note that� on the
unit circle� the para�pseudo�inverse in ������ becomes the conventional pseudo�inverse�
R�ej���� !hEH�ej����E�ej����
i��EH�ej���� �� �� �
��a�e� stands for almost everywhere�

�� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
In the oversampled case� the nonuniqueness of the synthesis FB for given analysis
FB entails a freedom of design that does not exist in the case of critical sampling�
Expression ����� is a parameterization of R�z� in terms of the MN entries �U�z��k�l
that can be chosen arbitrarily�
The particular synthesis polyphase matrix given by the para�pseudo�inverse R�z� !h#E�z�E�z�
i�� #E�z� can be given an important interpretation� For given analysis �lter
impulse responses hk�n�� consider the particular synthesis �lter impulse responses fk�n�
provided by frame theory via ����� i�e�� fk�n� ! �S��hyk��n�� or in other words� ffk�m�n�gis the UFBF that is dual to fhk�m�n�g� From hyk�n� ! �Sfk��n�� it follows with ������
by setting x�n� ! fk�n� in ����� for k ! �� � ���� N � � that #E�z� ! #E�z�E�z�R�z��
This implies R�z� !h#E�z�E�z�
i�� #E�z� ! R�z�� Thus� the para�pseudo�inverse of E�z�
corresponds to the particular PR synthesis FB provided by frame theory� It is shown in
��� that this frame�theoretic solution minimizesPN��
k�� kfkk� among the class of all left�
inverses� In ���� it has been previously observed for the FIR case that the para�pseudo�
inverse corresponds to the frame�theoretic solution� We shall hereafter restrict our
attention mainly to this minimum norm synthesis FB � i�e�� to the particular synthesis
polyphase matrix R�z� !h#E�z�E�z�
i�� #E�z�� which will henceforth be denoted simply
by R�z�� The signi�cance of the para�pseudo�inverse is highlighted by the fact �to be
proved in Subsection ������ that in the case of white uncorrelated noise added to the
subband signals the para�pseudo�inverse minimizes the resulting reconstruction error�
PR condition in the frequency domain� The FB output signal in the frequency
domain �z�domain� reads
X�z� !
M
M��Xm��
N��Xk��
Fk�z�Hk�z WmM �
�X�z Wm
M ��
with WM ! e�j���M � The PR condition can therefore be written as
M
N��Xk��
Fk�z�Hk�z WmM � ! ��m�� ������
Using
X�z W lM� !
M
M��Xm��
N��Xk��
Fk�z WlM �Hk�z W
mM �
�X�z Wm
M �
with l ! �� � ����M � � the PR condition can be rewritten in matrix form as
F�z�H�z� ! IM � ������
where F�z� with �F�z��k�l !�pMFl�z W
kM� is theM �N synthesis alias component �AC�
matrix and H�z� with �H�z��l�k !�pMHl�z W
kM� is the N � M analysis AC matrix� In
the oversampled case N � M � F�z� is not uniquely determined for given H�z�� any
solution of ������ can be written as
F�z� ! F�z� "V�z��IN �H�z� F�z��� ������

���� PERFECT RECONSTRUCTION AND FRAME PROPERTIES �
where V�z� is an M � N matrix with arbitrary elements �V�z��k�l satisfying
j�V�ej�����k�lj � � and F�z� is the para�pseudo�inverse of H�z�� which is a partic�
ular solution of ������ given by
F�z� ! � #H�z�H�z���� #H�z��
The parameterization ������ can equivalently be written as
Fk�z� ! Fk�z� " Vk�z��
M
M��Xi��
Fk�zWiM �
N��Xl��
Hl�zWiM �Vl�z�� ������
where Fk�z� denotes the synthesis �lters corresponding to the dual frame and the Vl�z�
are related to V�z� as �V�z��k�l ! Vl�zWkM �� The analysis operator T and the synthesis
operator �T�are represented in the AC domain by H�z� and F�z�� respectively� The
frame operator S and the inverse frame operator S�� are represented by #H�z�H�z�
and F�z�#�F�z�� respectively� The basis underlying this matrix representation �with z !
ej���� is given by tk���n�� !
P�m��� ��n� � m� ej�����
kM �n� with n ! �� � ����M � and
� � � � �
The AC matrices can be obtained from the polyphase matrices as
H�z� ! E�zM�D�z�W and F�z� ! WHD���z�R�zM�� ������
where D�z� ! diagfzngM��n�� and W denotes the M � M DFT matrix with elements
�W�m�n ! �pMWmn
M �
PR condition in the time domain� The input�output relation in the time domain
reads
x�n� !N��Xk��
�Xm���
hx� hk�mi fk�m�n�� ���� �
which leads to the following time�domain formulation of the PR condition�
N��Xk��
�Xm���
fk�n�mM �hk�mM � r� ! ��r � n�� �����
Rewriting this equation in matrix form� it follows that the FB satis�es the PR property
if and only if ��
BA ! I�� ������
Here the analysis matrix
A !
������������
� � � � � � � � � � � �
H� H� ��� HL�� �H� H� ��� HL��
� H� H� ��� HL��� � � � � � � � � � � �
������������
��I� denotes the identity matrix of in nite size�

�� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
is an in�nite�size block T�oplitz matrix consisting of the sequence of N � M matrices
Hl �l ! �� � ���� L� � de�ned as
Hl !
��������
hy��lM � hy��lM " � ��� hy��lM "M � �
hy��lM � hy��lM " � ��� hy��lM "M � ����
��� ������
hyN���lM � hyN���lM " � ��� hyN���lM "M � �
�������� �
where hy�n� ! h��n�� The number L of matrices Hl is given by�� L !lLhM
m� where Lh
denotes the length of the longest analysis �lter� Similarly� the synthesis matrix
B !
�����������������������
� � �
� � � FT� �
� � � FT� FT
�
� � ���� FT
� FT�
FTL���
��� FT�
� � �
FTL���
���� � �
� FTL���
� � �� � �
�����������������������
is an in�nite�size block T�oplitz matrix consisting of the sequence of N � M matrices
Fl �l ! �� � ���� L� � � de�ned as
Fl !
��������
f��lM � f��lM " � ��� f��lM "M � �
f��lM � f��lM " � ��� f��lM "M � ����
��� ������
fN���lM � fN���lM " � ��� fN���lM "M � �
�������� �
The number L� of matrices Fl is L� !
lLfM
m� where Lf denotes the length of the longest
synthesis �lter�
In the oversampled case N � M � for given analysis matrix A� the synthesis matrix
B is not uniquely determined� any solution of ������ can be written as
B ! B"P�I� �A B�� �����
where P is an arbitrary matrix of in�nite size and B is the pseudo�inverse of A� which
is a particular solution of ������ given by
B ! �AHA���AH �
��dae denotes the smallest integer exceeding a�

���� PERFECT RECONSTRUCTION AND FRAME PROPERTIES ��
The parameterization ����� can equivalently be written as
fk�n� ! fk�n� " pk�n� �N��Xl��
�Xm���
h fk� hl�mi pl�m�n� � ������
where pk�m�n� ! pk�n �mM � with pk�n� �k ! �� � ���� N � � being arbitrary functions
and fk�n� denote the synthesis �lters corresponding to the dual frame�
The analysis operator T and the synthesis operator �T�are represented by the matrices
A and �B� respectively� Consequently� the frame operator S is represented by the matrix
AHA and the inverse frame operator is represented by the matrix B �BH�
Unitary equivalence of di�erent representations� We �nally note that the
polyphase domain� frequency domain� and time�domain representations of the operators
T � �T�� S and S�� are unitarily equivalent� Let us� for example� consider the various
representations of the frame operator S� Using ������ we get
#H�z�H�z� !WH #D�z�#E�zM �E�zM�D�z�W ! #L�z�#E�zM �E�zM�L�z��
where L�z� ! D�z�W� It can be shown that #L�z�L�z� ! L�z�#L�z� ! IM � which
implies that the AC domain and the polyphase domain representations of the frame
operator� #H�z�H�z� and #E�zM �E�zM�� are unitarily equivalent� In a similar manner it
can be shown that the time domain and the frequency domain representations� AHA
and #H�z�H�z�� are unitarily equivalent� As a consequence of this unitary equivalence�
it follows immediately that the eigenvalues of the di�erent representations and hence
the frame bounds are equal� For the sake of simplicity� we shall henceforth work with
the polyphase matrices�
����� Completeness
The next theorem states a condition for the completeness of the analysis set fhk�m�n�g�Note that the completeness of fhk�m�n�g is a necessary condition for PR�
Theorem ���� The set fhk�m�n�g with hk�m�n� ! h�k�mM � n� is complete
in l��ZZ� if and only if the analysis polyphase matrix E�ej���� has full rank�
i�e�� rankfE�ej����g ! M � a�e� on � � ��� ��
Proof� Assuming completeness of fhk�m�n�g� it follows that hSx� xi !PN��k��
P�m��� jhx� hk�mij� � � for x�n� ! �� and hence the eigenvalues of S �simul�
taneously the eigenvalues n��� of S�ej����� see Corollary ���� satisfy n��� � � a�e� for
� � � � and n ! �� � ����M � � This shows that S�ej���� has full rank a�e�� Since
rankfS�ej����g ! rankfE�ej����g� we get rankfE�ej����g ! M a�e� The converse state�
ment is shown by reversing this line of reasoning� �

�� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
It is intuitively obvious that FBs cannot satisfy the PR property in the undersampled
case N � M � Indeed� for N � M the set fhk�m�n�g is incomplete in l��ZZ�� and hence
it is not possible to expand every signal x�n� � l��ZZ� into the functions hk�m�n�� This
can be seen as follows� Since rankfS�ej����g ! rankfE�ej����g� which for N � M is
maximally N � it follows using Theorem ��� that fhk�m�n�g is incomplete in l��ZZ��
����� Frame Conditions
We shall next derive conditions for a FB to provide a UFBF expansion in l��ZZ�� FBs
providing UFBF expansions are always PR FBs� Besides the PR property� the frame
property guarantees a certain degree of numerical stability �see the discussion on frame
bounds in Sections ����� ����� and A���
Lemma ���� The analysis set fhk�m�n�g has an upper frame bound B ���
i�e��
N��Xk��
�Xm���
jvk�m�j� !N��Xk��
�Xm���
jhx� hk�mij� � Bkxk� � x�n� � l��ZZ� �
if and only if the polyphase components Ek�n�ej���� are all bounded a�e�� i�e��
jEk�n�ej����j � K �� a�e� on ��� � for k ! �� � ���� N�� n ! �� � ����M��
Proof� Let jEk�n�ej����j � K � � a�e�� It follows that the entries of the UFBF
matrix S�ej���� ! EH�ej����E�ej���� are bounded a�e�� which implies that the n���
are bounded a�e�� Using Theorem ��� we conclude that B � �� We next prove the
converse� Let B ! ess sup �� ������ n���������M�� n��� � �� It follows thatPM��
n�� n��� is
bounded a�e�� With ����� this implies that the Ek�n�ej���� are bounded a�e�� �
Theorem ��� An oversampled FB with BIBO stable�� analysis �lters
hk�n� provides a UFBF expansion in l��ZZ�� i�e�� the analysis set fhk�m�n�gis a UFBF for l��ZZ�� if and only if the analysis polyphase matrix E�z� has
full rank on the unit circle��� i�e��
rankfE�ej����g ! M for � � � � �
Proof� From hk�n� � l��ZZ� it follows that the Ek�n�ej���� are bounded� and hence we
conclude from Lemma �� that an upper frame bound B �� exists� It remains to show
that a full rank E�ej���� is necessary and su�cient for the existence of a lower frame
��BIBO stability means that hk�n� � l��ZZ�� i�e��P�
n��� jhk�n�j �� for k � �� �� ���� N � ����We emphasize that E�z� is here required to have full rank everywhere on the unit circle� In
contrast� the completeness condition in Theorem ��� merely required E�z� to have full rank a�e� on the
unit circle�

���� PERFECT RECONSTRUCTION AND FRAME PROPERTIES ��
bound A� If E�ej���� has full rank on ��� �� then S�ej���� ! EH�ej����E�ej���� has full
rank on ��� �� which means that n��� � � for � � � � and n ! �� � ����M � � From
hk�n� � l��ZZ� it follows that the n��� are continuous functions of �� and therefore
we can conclude that�� A ! ess inf �� ������ n���������M�� n��� � �� We next prove that�
conversely� a full rank E�ej���� is necessary for the existence of A � �� Suppose that
E�ej���� does not have full rank on ��� �� It follows that S�ej���� does not have full
rank on ��� �� This implies that there is at least one eigenvalue with n��� ! � on
a measurable set with positive measure� Hence� using Theorem ��� we conclude that
A ! �� �
Alternatively� it can be shown that a FB corresponds to a UFBF for l��ZZ� if E�ej����
has full rank for � � � � and the Ek�n�ej���� are continuous and bounded functions
of �� Yet another condition is phrased in terms of the eigenvalues of the UFBF matrix
S�ej�����
Corollary ��� An oversampled FB provides a UFBF expansion in l��ZZ�
if and only if the eigenvalues n��� of the UFBF matrix S�ej���� !
EH�ej����E�ej���� satisfy
ess inf �� ������n���������M�� n��� � � and ess sup �� ������n���������M�� n��� � ��
Proof� It is known ���� � �� that fhk�m�n�g is a frame if and only if ess inf � �
and ess sup �� where fg is the set of all eigenvalues of the frame operator S� Due
to Corollary ���� the eigenvalues of S equal the eigenvalues n��� of S�ej����� which
completes the proof� �
Using the fact that FIR �lters are inherently BIBO stable� and thus one of the con�
ditions of Theorem ��� is always satis�ed here� it follows as an immediate consequence
of Theorem ��� that an oversampled FB with FIR analysis �lters provides a UFBF ex�
pansion in l��ZZ� if and only if the analysis polyphase matrix E�z� has full rank on the
unit circle� i�e�� rankfE�ej����g ! M for � � � � � This condition has been reported
previously in ����� We emphasize that Theorem ��� is more general since it holds for
both FIR and IIR FBs� In the following� a FB providing a UFBF expansion in l��ZZ�
will be called a frame FB �FFB�� Throughout this text we will restrict our attention to
BIBO stable �lters hk�n��
��For a continuous function the essential in mum is the in mum �this is however not relevant to this
proof��
�� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
����� Approximative Construction of the Synthesis Filter
Bank
In the case of an FFB� it follows from ������ that the calculation of the minimum norm
synthesis FB requires the inversion of the matrix #E�z�E�z�� which is a cumbersome
task in general� By analogy to the approximation of dual frames described in ��� an
approximative calculation of the synthesis FB can be based on a series expansion of
S���z� !h#E�z�E�z�
i��� Indeed� applying the Neumann expansion �see Theorem A� ��
to the matrix �#E�z�E�z���� we obtain
h#E�z�E�z�
i��!
�
A "B
�IM �
IM � �
A "B#E�z�E�z�
����
!�
A "B
�Xi��
IM � �
A"B#E�z�E�z�
�i�
and consequently the minimum norm synthesis FB is expressed as
R�z� !�
A"B
�Xi��
IM � �
A"B#E�z�E�z�
�i �#E�z� � ������
The norm convergence of this series expansion follows from frame theory ��� �see The�
orem A��� using the correspondence between S and #E�z�E�z��
By truncating the expansion ������� the synthesis FB can be approximated with
arbitrary accuracy� Estimates of the resulting reconstruction error are available ����
We shall here restrict our attention to the �rst order approximation of R�z� obtained
by retaining only the i ! � term in �������
R ���z� !�
A "B#E�z� �
which corresponds to an approximation of the minimum norm synthesis �lters fk�n� as
f ��k �n� !
�
A"Bh�k��n�� ������
The reconstruction error resulting from this approximation can be bounded in terms of
the frame bounds A and B� With x ���n� denoting the signal reconstructed using the
above ��rst order synthesis FB�� we have from Theorem A� the error bound
k x �� � xk � B�A�
A�B " kxk� ������
We can see that the reconstruction error is small if the tightest possible frame bounds
A and B satisfy B�A � The underlying UFBF is thus called snug� In this case
the synthesis impulse responses f ��k �n� are a good approximation to the true minimum
norm� PR impulse responses fk�n�� in the sense that the resulting reconstruction error

���� PERFECT RECONSTRUCTION AND FRAME PROPERTIES ��
k x �� � xk is small� In the tight case where B�A ! � the reconstruction error becomes
zero� and indeed the approximation is here exact�
f ��k �n� ! fk�n� !
Ah�k��n��
Besides the trivial �rst order approximation discussed above� the series expansion
������ also allows the iterative calculation of the synthesis �lters fk�n�� This iterative
calculation is outlined in Corollary A�� and can be reformulated in terms of polyphase
matrices using the correspondence between S and #E�z�E�z��
����� Critical Sampling Linear Independence and Biorthog�
onality
It is well known that critically sampled FBs provide decompositions into Riesz bases
or equivalently exact frames ���� �� �� �see Section A���� In �nite�dimensional spaces
exact frames have linearly independent frame functions� In in�nite�dimensional spaces
exactness of a frame is re�ected in the fact that the expansion coe�cients �subband
signals� are uniquely determined� By abuse of notation we shall sometimes use the
notion of linear independence for frames in in�nite�dimensional spaces meaning that
the expansion coe�cients are uniquely determined� Consequently� we shall use the
notion of linear dependence for frames in in�nite�dimensional spaces meaning that the
frame leads to nonunique expansion coe�cients� Equivalently� one can say that there
is redundancy in the expansion coe�cients�
Exact frames are distinguished by the linear independence of the frame functions�
If fhk�m�n�g is an exact UFBF� then the dual frame ffk�m�n�g is exact as well� and
the expansion coe�cients ck�m in the expansion x�n� !PN��
k��
P�m��� ck�m fk�m�n� are
uniquely de�ned for any given x�n�� Furthermore� an exact frame is minimal in the
sense that the removal of an arbitrary frame function from the set fhk�m�n�g leaves an
incomplete set ����� In ���� ��� �� it has been shown that critically sampled FBs may
provide decompositions into Riesz bases or equivalently exact frames� Based on the
framework developed so far� we shall now give an alternative proof for the equivalence
between critically sampled FBs and exact frames�
Theorem ��� ���� �� �� An FFB provides an exact UFBF expansion if
and only if it is critically sampled�
Proof� Let fhk�m�n�g be a critically sampled UFBF �N ! M�� Assume that the
hk�m�n� are linearly dependent� Then we can �nd coe�cients� bk�m which are not all
��The coe�cients bk�m satisfyPM��
k��
P�m��� jbk�mj
� ���
� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
zero such thatM��Xk��
�Xm���
bk�m hk�m�n� ! � � ������
Applying the polyphase decomposition to both sides of ������ yields
EH�ej����b�ej���� ! � a�e�� ������
where b�ej���� ! �B��ej���� B��e
j���� ��� BM���ej�����T with Bk�ej���� !P�
m��� bk�m e�j��m�� Since fhk�m�n�g is a frame� it follows from Theorem ��� that the
analysis polyphase matrix E�ej���� has full rank a�e�� This implies that the only solution
of ������ is the trivial solution b�ej���� ! � a�e�� But the bk�m were shown above to be
not all zero� which is a contradiction� We conclude that the hk�m�n� must be linearly
independent and therefore the set fhk�m�n�g is an exact frame for l��ZZ��
It remains to show that� conversely� exact UFBFs are critically sampled� Let N �M
�note that the case N � M is impossible� since the set fhk�m�n�g would be incomplete
in l��ZZ�� and assume that fhk�m�n�g is an exact frame� Due to the linear independence
of the functions hk�m�n� it follows thatPN��
k��
P�m��� bk�m hk�m�n� ! � only if the bk�m
are all zero� Equivalently� in the polyphase domain� EH�ej����b�ej���� ! � a�e� only
if b�ej���� ! � a�e�� This is true only if the rank of the N �M matrix E�ej���� is N
which� combined with N �M � implies N ! M � i�e�� critical sampling� �
As a consequence of Theorem ��� �see Corollary A���� in critically sampled FBs
the frame functions hk�m�n� and their duals fk�m�n� satisfy the biorthogonality relation
���� �� ��
hhk�m� fk��m�i ! �k�k� �m�m� � ���� �
It follows furthermore that an oversampled UFBF cannot be exact� hence the corre�
sponding FB cannot be biorthogonal�
��� Oversampled Paraunitary Filter Banks and
Tight Frames
In this section� we show that oversampled paraunitary FBs provide tight UFBF expan�
sions in l��ZZ�� and we discuss a frame�theoretic method for constructing paraunitary
FBs�
����� Equivalence of Oversampled Paraunitary Filter Banks
and Tight Frames
The analysis UFBF fhk�m�n�g is tight if the tightest possible frame bounds satisfy A !
B� From frame theory we know that this implies S!AI ���� With ����� this implies

���� OVERSAMPLED PARAUNITARY FILTER BANKS �
that the frame�theoretic �i�e�� minimum norm� solution for the PR synthesis FB is
fk�n� !
Ah�k��n� �
or equivalently R�z� ! �A#E�z�� This is precisely the relation between the synthesis and
analysis �lters in a paraunitary FB ���� In fact we can formulate the following theorem�
Theorem �� � An oversampled FB provides a tight UFBF expansion in
l��ZZ� if and only if it is paraunitary � i�e��
S�z� ! #E�z�E�z� � A IM �
The frame bound is A ! Sn�n�z� !N��Pk��
#Ek�n�z�Ek�n�z��
Proof� From S�z� ! A IM � it follows with ����� that y�z� ! Ax�z� which implies
y�n� ! Ax�n�� Hence� comparing with y�n� ! �Sx��n�� we conclude that S ! AI� i�e��
fhk�m�n�g is a tight UFBF with frame bound A� The converse statement is proven
by reversing this line of reasoning� Combining Sn�n�z� !PN��
k��#Ek�n�z�Ek�n�z� and
S�z� ! A IM � it follows that A ! Sn�n�z� !PN��
k��#Ek�n�z�Ek�n�z�� �
The equivalence of tight Weyl�Heisenberg frames �a subclass of UFBFs� and parau�
nitary DFT FBs �see Chapter �� has been observed in �� � and independently in �����
For the FIR case the equivalence between tight frames in l��ZZ� and paraunitary FBs
has been reported previously in ����� Note that Theorem �� holds also in the IIR
case� Furthermore Theorem �� also holds in the critically sampled case� where the
underlying frame is not only tight but also orthogonal� The equivalence of paraunitary
FBs and tight frames in the critically sampled case has been known for several years
���� ��� �� ���
Paraunitary FBs are often referred to as orthogonal FBs� However� the name �or�
thogonal� is justi�ed only in the critical case� In the oversampled case� paraunitary
FBs correspond to UFBFs that are tight but not orthogonal�
����� Construction of Paraunitary Filter Banks
From Corollary A��� we know that the function set obtained by applying the inverse
positive de�nite operator square root S���� to each of the frame functions fhk�m�n�gyields a tight frame� Since S corresponds to #E�z�E�z�� the inverse square root S����
corresponds to an inverse square root of the matrix #E�z�E�z��
Theorem ���� Consider an FFB with polyphase matrices E�z� and R�z��
and let P�z� be an invertible� parahermitian��� M �M matrix such that
�A matrix P�z� is said to be parahermitian if �P�z� � P�z� �����

�� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
P��z� ! #E�z�E�z�� Then the FFB with analysis polyphase matrix
E p��z� ! E�z�P���z�
is paraunitary with frame bound A ! � i�e�� S p��z� ! #E p��z�E p��z� �IM � The corresponding synthesis polyphase matrix is given by R p��z� !#E p��z� ! P���z� #E�z�� If� in the critically sampled case� the original FFB
is moreover biorthogonal� then the FFB with analysis polyphase matrix
E p��z� is orthogonal�
Proof� We have S p��z� ! #E p��z�E p��z� ! #P���z� #E�z�E�z�P���z�� Inserting#E�z�E�z� ! P��z� in the right hand side and using #P�z� ! P�z�� it follows that#E p��z�E p��z� ! IM � which shows that the FB with polyphase matrix E p��z� is parau�
nitary with frame bound A ! �
From the theory of frames we know ���� �� that applying the procedure described
above to an exact frame �corresponding to a biorthogonal FFB�� an orthogonal function
set �corresponding to an orthogonal FFB� is obtained� �
The matrix P���z� can be calculated by performing a factorization of P���z� !
R�z� #R�z�� A detailed study of this factorization problem for both polynomial and
rational matrices is given in � �� Another method to calculate the matrix P���z� is
to perform a series expansion similar to ������� Using the correspondence between the
operator S and the matrix #E�z�E�z� we have ��
P���z� !
s�
A"B
�Xi��
��i�$
��i �i$��
IM � �
A "B#E�z�E�z�
�i�
��� Important Special Cases
In this section� we discuss FFBs whose frame operator becomes a simple multiplication
operator in the polyphase domain or in the frequency domain� i�e�� the polyphase repre�
sentation or the Fourier transform �diagonalizes� the frame operator� This class of FBs
comprises integer oversampled DFT FBs� nondecimated FBs� and bandlimited FBs� We
shall see that the calculation of the synthesis FB� of the frame bounds� and of parau�
nitary FBs is drastically simpli�ed in these cases� Furthermore� we apply our results
to redundant block transforms� which can be viewed as a special class of oversampled
FBs�
����� Diagonality in the Polyphase Domain
According to Theorem ���� the frame operator is represented in the polyphase domain
by the UFBF matrix� Consequently� an FFB is �diagonal in the polyphase domain� if

���� IMPORTANT SPECIAL CASES �
the UFBF matrix is a diagonal matrix�
S�z� ! #E�z�E�z� ! diagfSn�n�z�gM��n�� with Sn�n�z� !
N��Xk��
#Ek�n�z�Ek�n�z� �
It follows from ������ that the polyphase matrix of the minimum norm synthesis FB is
given by
R�z� ! diag
�
Sn�n�z�
�M��
n��
#E�z� � Rk�n�z� !#Ek�n�z�
Sn�n�z������
�note that S���z� ! diagf�Sn�n�z�gM��n�� in the diagonal case�� We can see that the
calculation of the synthesis FB� which in general requires the inversion of a matrix�
reduces to simple divisions in the polyphase domain�
Using the fact that the eigenvalues of the diagonal matrix S�ej���� !
EH�ej����E�ej���� are given by
n��� ! Sn�n�ej���� !
N��Xk��
jEk�n�ej����j��
it follows from Corollary ��� that the FB is an FFB if and only if
ess inf�� ������ n���������M��
Sn�n�ej���� � � and ess sup
�� ������ n���������M��Sn�n�e
j���� � ��
and according to Theorem ��� the frame bounds are given by
A ! ess inf�� ������ n���������M��
Sn�n�ej���� � B ! ess sup
�� ������ n���������M��Sn�n�e
j���� �
In particular� the FB is paraunitary with frame bound A if and only if
Sn�n�z� !N��Xk��
#Ek�n�z�Ek�n�z� � A for n ! �� � ����M � �
The construction of paraunitary FFBs from nonparaunitary FFBs �see Theorem ���
simpli�es as well� Consider an FFB with polyphase components Ek�n�z� and Rk�n�z��
and de�ne Pn�z� by P �n�z� ! Sn�n�z� with #Pn�z� ! Pn�z�� Then� the FB with analysis
polyphase components
E p�k�n�z� !
Ek�n�z�
Pn�z�������
is paraunitary with A ! � i�e�� #E p��z�E p��z� � IM � Thus� the matrix factorization#E�z�E�z� ! P��z� reduces to the factorization of polynomials in z �in the FIR case� or
rational functions in z �in the IIR case��
Integer oversampled DFT FBs � �� �� ��� ��� ��� ��� are another important example
of FBs that are diagonal in the polyphase domain� This type of FBs will be discussed
in detail in Subsec� ������

�� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
����� Diagonality in the Frequency Domain
A FB is �diagonal in the frequency domain� if its frame operator is a simple multipli�
cation operator in the frequency domain �z�transform domain�� With y�n� ! �Sx��n��
this means
Y �z� ! Gh�z�X�z� with Gh�z� !
M
N��Xk��
Hk�z� #Hk�z� � �����
where X�z�� Y �z�� and Hk�z� denote the z�transforms of x�n�� y�n�� and hk�n�� respec�
tively� The eigenvalues of the underlying frame operator� which here corresponds to the
scalar function Gh�ej����� are
��� ! Gh�ej���� !
M
N��Xk��
jHk�ej����j�� ������
Two important classes of FBs that are diagonal in the frequency domain are nondeci�
mated FBs and bandlimited FBs� Nondecimated FBs are FBs with no decimation in the
subbands�� �i�e�� M ! �� Nondecimated FIR FBs have been studied previously in �����
Bandlimited FBs are FBs whose analysis �lters have bandwidth � �M � Bandlimited
FBs are clearly IIR FBs�
With ������ it follows that the z�transforms of the minimum norm synthesis �lters
are obtained as
Fk�z� !#Hk�z�
Gh�z��
Furthermore� ������ implies that the frame condition can be reformulated as
ess inf�� �����
Gh�ej���� � � and ess sup
�� �����Gh�e
j���� � ��
With Gh�ej���� ! �
M
PN��k�� jHk�e
j����j�� the lower bound means that the set of analysis
�lters has to �cover� the entire frequency interval ��� �� This condition is satis�ed if and
only if the analysis �lters have no zeros in common on the unit circle� The upper bound
is automatically satis�ed for BIBO stable hk�n�� i�e�� hk�n� � l��ZZ� �k ! �� � ���� N���
The frame bounds are given by
A ! ess inf�� �����
Gh�ej����� B ! ess sup
�� �����Gh�e
j�����
Paraunitarity with frame bound A implies
Gh�z� !
M
N��Xk��
Hk�z� #Hk�z� � A�
�We note that nondecimated FBs are also trivially diagonal in the polyphase domain�

���� IMPORTANT SPECIAL CASES ��
which means that the analysis �lters Hk�z� are power complementary ���� Paraunitary
FBs with frame bound A ! can be constructed by solving the factorization P ��z� !
Gh�z� with #P �z� ! P �z�� the paraunitary analysis �lters are then given by
H p�k �z� !
Hk�z�
P �z��
����� Redundant Block Transforms
Block transforms ��� can be viewed as a special case of FBs ��� ��� In this section� we
specialize our frame�theoretic results to redundant �oversampled� block transforms�
In a block transform� the input signal x�n� is cut into nonoverlapping blocks x�m� !
�x�mM � x�mM " � ��� x�mM "M � ��T of M consecutive samples� which are linearly
transformed into blocks v�m� ! �v��m� v��m� ��� vN���m��T of N transform coe�cients
vk�m�� i�e��
v�m� ! Ex�m�
with the N �M analysis polyphase matrix E which is given by
E !
��������
h���� h���� ��� h����M � ��
h���� h���� ��� h����M � �����
������
���
hN����� hN����� ��� hN�����M � ��
�������� �
Note that the polyphase matrix E does not depend on z� For N � M the transform
coe�cients are redundant� The basis functions hk�n� of the block transform are the im�
pulse responses of the analysis FB� and the transform coe�cients vk�m� are the subband
signals ��� ��� Note that the analysis �lter impulse responses hk�n� are supported within
the interval n ! �M " ��M " �� ���� �� A classical choice for E in the nonredundant
�critically sampled� case is a unitary matrix satisfying EHE ! IM � This choice leads to
an orthonormal block transform or equivalently a paraunitary FB � �� ���
The synthesis relation is
x�m� ! Rv�m��
with the M � N synthesis polyphase matrix R� The PR property x�m� ! x�m� is
satis�ed if and only if RE ! IM � which presupposes rankfEg ! M �cf� Theorem �����
In the redundant case N � M � the synthesis matrix R is not uniquely determined� it
may be any left�inverse of E� Hence� the general form of R is �see ������
R ! R" U �IN �E R� � ������
where U is an arbitrary M � N matrix and R ! �EHE���EH is the pseudo�inverse of
E which corresponds to the synthesis basis vectors with minimum norm�

�� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
The block transform provides a UFBF expansion in l��ZZ� if and only if E has rank
M � The frame condition rankfEg ! M is seen to be no more restrictive than the PR
condition� this is explained by the �nite dimension of the spaces of signal vectors and
transform coe�cient vectors� The frame bounds A and B of the block transform are the
minimum and maximum� respectively of the eigenvalues of S ! EHE� The frame�PR
condition rankfEg ! M impliesPN��
k�� jhk�n�j � � for n ! �M " ��M " �� ���� � since
otherwise E would contain a zero column� This shows that the impulse responses hk�n�
must not all be zero for the same index n� i�e�� the set of analysis impulse responses
must �cover� the entire time interval n ! �M " ��M " �� ���� ��
��� Oversampled FIR Filter Banks
Oversampled FIR FBs are a special case of the theory presented in the previous sections�
In the FIR case the polyphase matrices are polynomial matrices in z� which has several
interesting consequences to be discussed in this section� A detailed study of oversampled
FIR FBs has been provided in ���� ���� For the sake of completeness� we shall review
some of the results presented in ���� ���� We also present original results and extensions
of the results in ���� ����
����� Smith Form Decomposition
The Smith form decomposition allows to decompose polynomial matrices into simpler
forms such as triangular and diagonal forms ��� ���� This �diagonalization� will prove
useful in what follows�
The N �M analysis polyphase matrix E�z� in a PR FB can be decomposed into its
Smith form according to ��� ���
E�z� ! A�z�D�z�B�z��
where A�z� and B�z� are unimodular �� matrix polynomials of size N �N and M �M �
respectively� The N �M matrix D�z�� called the Smith form of E�z�� is given by
D�z� !
�����������������
d��z� � ��� �
� d��z� ��� ����
������
���
� � ��� dM���z�
� � ��� ����
������
���
� � ��� �
�����������������
�
��A unimodular matrix is a square polynomial matrix in z with constant nonzero determinant�
���� OVERSAMPLED FIR FILTER BANKS ��
where we used the fact that E�z� has normal rank�� M � �Since we are considering
PR FBs� the set fhk�m�n�g has to be complete in l��ZZ�� hence� by Theorem ���� the
normal rank of E�z� is M �� We note that a matrix polynomial is unimodular if and
only if it can be represented as the product of a �nite number of elementary matrices
��� ���� Premultiplying a matrix with an elementary matrix provides elementary row
and column operations� such as interchanging two rows �columns�� multiplying a row
�column� with a nonzero constant� or adding a polynomial multiple of a row �column�
to another row �column�� Note furthermore that the matrices A�z� and B�z� are not
uniquely determined� A�z� and B�z� can be chosen such that the polynomials di�z� are
monic�� and that di�z� is divisible by di���z�� Furthermore the elements of D�z� can
be expressed in terms of the elements of E�z� ����� For a detailed discussion of matrix
polynomials see ���� �� ����
����� Analysis of Oversampled FIR Filter Banks
As an immediate consequence of Theorem ���� we obtain the following corollary which
is due to Cvetkovi%c and Vetterli ���� ����
Corollary ��� ����� An oversampled FIR FB provides a UFBF decompo�
sition in l��ZZ� if and only if the polynomials di�z� on the diagonal of its
Smith form have no zeros on the unit circle�
Proof� Noting that the polyphase matrix E�z� and its Smith form D�z� have the
same rank in the entire z plane ����� it follows from Theorem ��� that the FB provides
a UFBF decomposition in l��ZZ� if and only if D�z� is of full rank on the unit circle�
D�z� has full rank on the unit circle if and only if none of the polynomials di�z� has a
zero on the unit circle� �
Theorem ���� ����� For a given oversampled FIR analysis FB with analysis
polyphase matrix E�z�� the minimum norm synthesis FB is FIR if and only
if #E�z�E�z� is unimodular�
We shall next present a proof which is much shorter than the one originally presented
in �����
Proof� From R�z� ! �#E�z�E�z���� #E�z� it is obvious that the unimodularity of
the matrix #E�z�E�z� is su�cient for the synthesis FB to be FIR if the analysis FB
is FIR� We shall next show the necessity� Assume that both E�z� and R�z� are
��The normal rank of a matrix E�z� is the maximum possible rank in the entire zplane���A polynomial is said to be monic if the coe�cient of the highest power ocurring in the polynomial
is equal to ��

�� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
polynomial matrices� Then #E�z�E�z� and R�z� #R�z� are polynomial matrices� Now�
since R�z� #R�z� ! �#E�z�E�z���� we can conclude that both #E�z�E�z� and its inverse
�#E�z�E�z���� have to be polynomial matrices� It thus follows ���� that the determinant
of #E�z�E�z� satis�es �z��! det �#E�z�E�z�� ! c z�K with c �CI and K � ZZ� Now� since
�z� ! #�z�� it follows that �z� has to be a constant independent of z �i�e� K ! ���
which concludes the proof� �
The above theorem is a generalization of a result for critically sampled FBs ��� ���
which states that FIR analysis FB and FIR synthesis FB with PR is possible if and
only if the determinant of E�z� is a pure delay�
The following theorem ���� gives a complete parameterization of oversampled FBs
with FIR analysis and FIR minimum norm synthesis �lters�
Theorem ���� ����� Consider an oversampled FIR FB with analysis
polyphase matrix E�z�� Then #E�z�E�z� is unimodular if and only if E�z�
has the form
E�z� ! H�A��z�D��z�B��z�� ������
where the matrices H��A��z��D��z� and B��z� have the following form�
� H� is a constant N �M matrix satisfying HH� H� ! d IM �
� A��z� and B��z� are unimodular M �M matrices�
� D��z� is a diagonal M �M matrix of polynomials� with monomials on
the diagonal�
The proof of this result is given in ����� Recall that any unimodular matrix can be
factored into a product of a �nite number of elementary matrices� Since A��z� and
B��z� in Theorem �� are unimodular and any unimodular matrix can be expressed as
the product of a �nite number of elementary matrices ��� ���� ������ states that E�z�
can be expressed as the product of a �nite number of matrices of a special form�
The following theorem states an important result on the factorization of paraunitary
oversampled FBs �����
Theorem ���� ����� An oversampled FIR FB with analysis polyphase
matrix
E�z� ! VM�z�VM���z� ���V��z�H� ������
with
Vi�z� ! IN � vi vHi " z��vi v
Hi �
where vi is a unit norm vector of size N � and H� is a constant N �M
matrix satisfying HH� H� ! A IM � is paraunitary with frame bound A�

���� SIMULATION RESULTS ��
Theorem ��� can be viewed as an extension of a result formulated for the critically
sampled case by P� P� Vaidyanathan in ���� Note that� due to ������� the N �M matrix
E�z� is parameterized in terms of M constant vectors vi of size N � and a constant
N �M matrix H��
We shall next present a factorization of the analysis polyphase matrix that guarantees
FIR �lters in the analysis and the minimum norm synthesis FB� This factorization
extends a result reported for the critically sampled case in ����
Theorem ����� Let Am with m ! �� � ���� J � be constant nonsingular
M �M matrices and AJ a constant N �M matrix such that AHJ AJ is
nonsingular� For an FIR analysis FB with polyphase matrix
E�z� ! AJ ��z�AJ����z� ���A���z�A�� ������
where
��z� !
�� IM�� �
� z��
�� �
the minimum norm synthesis FB is FIR� it is given by
R�z� ! A��� ����z�A��
� ����z� ���A��J���
���z� �AHJ AJ�
��AHJ � ������
where
����z� !
�� IM�� �
� z
�� �
Proof� Using det��z� ! z��� it is readily seen that det #E�z�E�z� is a nonzero con�
stant� Hence� using Theorem ��� it follows that the minimum norm synthesis FB
is FIR� With R�z� !h#E�z�E�z�
i�� #E�z�� it is easily veri�ed that the minimum norm
synthesis FB is given by ������� �
This demonstrates that oversampled FIR FBs of arbitrarily high order can be con�
structed by structuring E�z� according to �������
So far� we have considered an FIR minimum norm synthesis FB� Apart from the min�
imum norm synthesis FB� the other PR synthesis FBs as given by the parameterization
����� are of interest as well� If the minimum norm synthesis FB of an FIR analysis FB
is FIR� then it follows from ����� that other PR synthesis FBs that are FIR as well
can be obtained by choosing the matrix U�z� as a polynomial matrix�
��� Simulation Results
We now present simulation results demonstrating the importance of snug frames �B�A � and the bene�ts of oversampling�
Snug frame� We consider a DFT FB �see Chapter �� with N ! �� channels and
a ��tap lowpass analysis prototype �lter h�n� as depicted in Fig� ��a�� Figs� ��b��
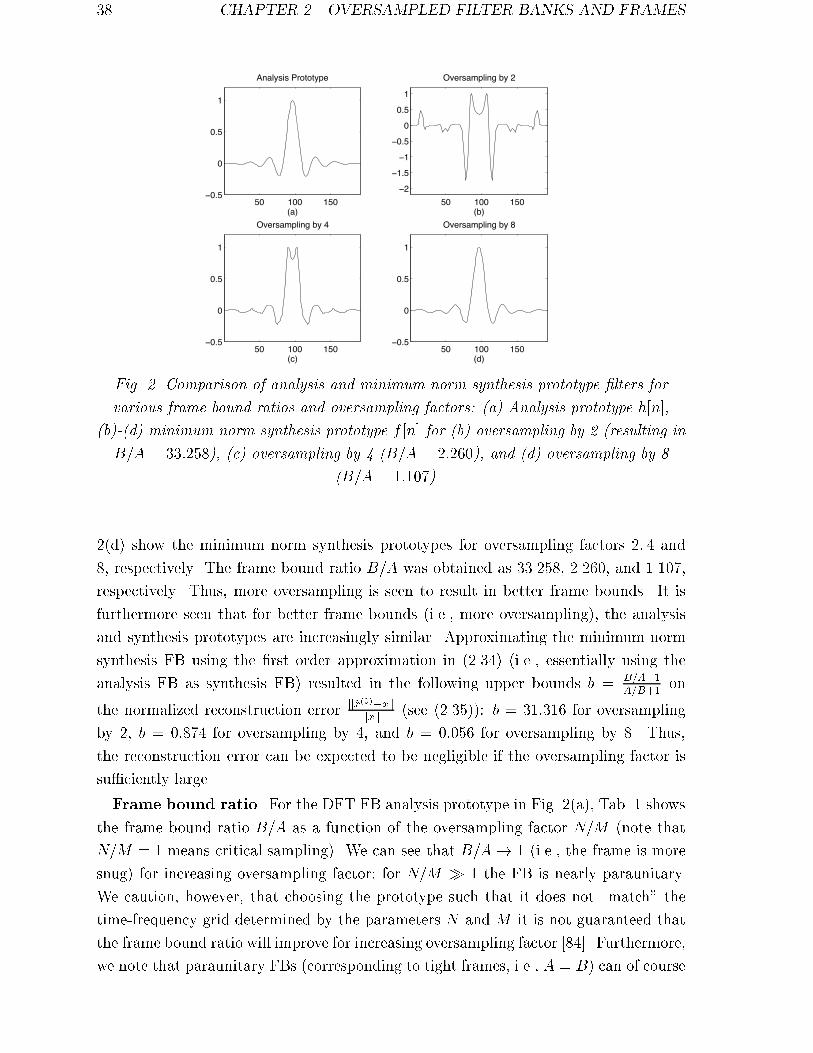
� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
50 100 150−0.5
0
0.5
1
(a)
Analysis Prototype
50 100 150
−2
−1.5
−1
−0.5
0
0.5
1
(b)
Oversampling by 2
50 100 150−0.5
0
0.5
1
(c)
Oversampling by 4
50 100 150−0.5
0
0.5
1
(d)
Oversampling by 8
Fig� �� Comparison of analysis and minimum norm synthesis prototype �lters for
various frame bound ratios and oversampling factors� a Analysis prototype h�n��
b�d minimum norm synthesis prototype f �n� for b oversampling by � resulting in
B�A ! ����� � c oversampling by � B�A ! ������ and d oversampling by
B�A ! ����
��d� show the minimum norm synthesis prototypes for oversampling factors �� � and
� respectively� The frame bound ratio B�A was obtained as ����� � ������ and ����
respectively� Thus� more oversampling is seen to result in better frame bounds� It is
furthermore seen that for better frame bounds �i�e�� more oversampling�� the analysis
and synthesis prototypes are increasingly similar� Approximating the minimum norm
synthesis FB using the �rst order approximation in ������ �i�e�� essentially using the
analysis FB as synthesis FB� resulted in the following upper bounds b ! B�A��A�B�
on
the normalized reconstruction error k�x����xkkxk �see �������� b ! ���� for oversampling
by �� b ! �� �� for oversampling by �� and b ! ����� for oversampling by � Thus�
the reconstruction error can be expected to be negligible if the oversampling factor is
su�ciently large�
Frame bound ratio� For the DFT FB analysis prototype in Fig� ��a�� Tab� shows
the frame bound ratio B�A as a function of the oversampling factor N�M �note that
N�M ! means critical sampling�� We can see that B�A� �i�e�� the frame is more
snug� for increasing oversampling factor� for N�M the FB is nearly paraunitary�
We caution� however� that choosing the prototype such that it does not �match� the
time�frequency grid determined by the parameters N and M it is not guaranteed that
the frame bound ratio will improve for increasing oversampling factor � ��� Furthermore�
we note that paraunitary FBs �corresponding to tight frames� i�e�� A ! B� can of course
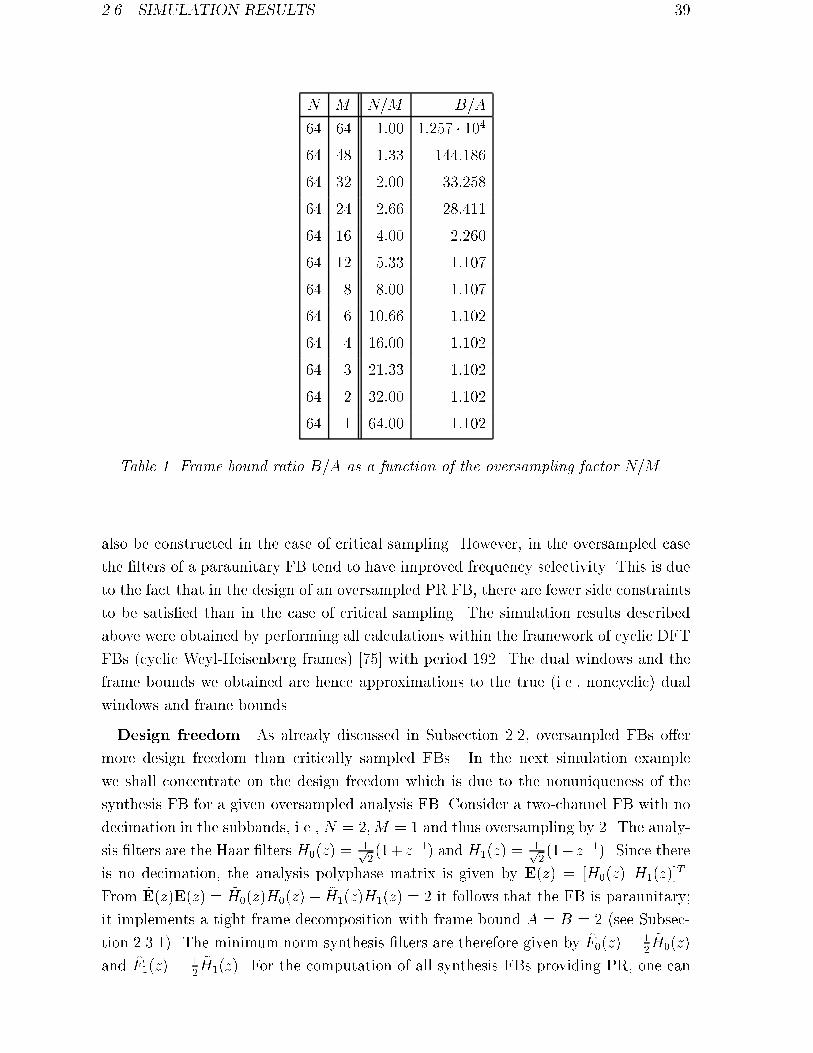
���� SIMULATION RESULTS �
N M N�M B�A
�� �� ��� ���� � ���� � ��� ��� �
�� �� ���� �����
�� �� ���� � ��
�� � ���� �����
�� � ���� ���
�� ��� ���
�� � ���� ���
�� � ���� ���
�� � ���� ���
�� � ����� ���
�� ����� ���
Table �� Frame bound ratio B�A as a function of the oversampling factor N�M �
also be constructed in the case of critical sampling� However� in the oversampled case
the �lters of a paraunitary FB tend to have improved frequency selectivity� This is due
to the fact that in the design of an oversampled PR FB� there are fewer side constraints
to be satis�ed than in the case of critical sampling� The simulation results described
above were obtained by performing all calculations within the framework of cyclic DFT
FBs �cyclic Weyl�Heisenberg frames� ���� with period �� The dual windows and the
frame bounds we obtained are hence approximations to the true �i�e�� noncyclic� dual
windows and frame bounds�
Design freedom� As already discussed in Subsection ���� oversampled FBs o�er
more design freedom than critically sampled FBs� In the next simulation example
we shall concentrate on the design freedom which is due to the nonuniqueness of the
synthesis FB for a given oversampled analysis FB� Consider a two�channel FB with no
decimation in the subbands� i�e�� N ! ��M ! and thus oversampling by �� The analy�
sis �lters are the Haar �lters H��z� !�p��"z��� and H��z� !
�p���z���� Since there
is no decimation� the analysis polyphase matrix is given by E�z� ! �H��z� H��z��T �
From #E�z�E�z� ! #H��z�H��z� " #H��z�H��z� ! � it follows that the FB is paraunitary�
it implements a tight frame decomposition with frame bound A ! B ! � �see Subsec�
tion ������ The minimum norm synthesis �lters are therefore given by F��z� !��#H��z�
and F��z� !��#H��z�� For the computation of all synthesis FBs providing PR� one can

�� CHAPTER �� OVERSAMPLED FILTER BANKS AND FRAMES
0 0.1 0.2 0.3 0.40
0.2
0.4
0.6
0.8
1
(a)M
agni
tude
Frequency response
0 0.1 0.2 0.3 0.40
0.2
0.4
0.6
0.8
1
(b)
Mag
nitu
de
Frequency response
0 0.1 0.2 0.3 0.40
0.2
0.4
0.6
0.8
1
(c)
Mag
nitu
de
Frequency response
0 0.1 0.2 0.3 0.40
0.2
0.4
0.6
0.8
1
(d)
Mag
nitu
de
Frequency response
Fig� �� Optimization of PR synthesis FB for Haar analysis FB oversampled by ��
a F��z�� b F��z�� c optimized F��z�� b optimized F��z��
use any of the three equivalent parameterizations provided in Subsection ����� Here� it
is convenient to use the frequency�domain parameterization�� ������� which in our case
reduces to
F��z� ! F��z� " V��z�� F��z��H��z�V��z� "H��z�V��z�� ���� �
F��z� ! F��z� " V��z�� F��z��H��z�V��z� "H��z�V��z��� �����
Any choice of V��z� and V��z� will lead to PR� The length of the synthesis �lters is
determined by the length of the �lters V��z� and V��z�� Assuming that both V��z� and
V��z� are FIR �lters of length Lv� it is easily seen that the �lters F��z� and F��z� have
length Lv " �� The parameterization in terms of the �lters V��z� and V��z� can now be
used to perform an optimization over the class of all synthesis �lter pairs fF��z�� F��z�gproviding PR�
In the next example� we choose the �lters V��z�� V��z� such that F��� !
�PLf��
n�� f��n��� is minimal for Lf ! �� i�e�� Lv ! �� Note that this corresponds to
an unconstrained optimization over the class of all synthesis �lters with length Lf pro�
viding PR� Figs� ��a� and �b� show the transfer functions of the minimum norm synthesis
�lters� In Figs� ��c� and �d� the transfer functions of the optimized PR synthesis �lters
are depicted�
��Note that since M � � the frequencydomain parameterization ������ is equal to the polyphase
domain parameterization �������
Chapter �
Oversampled DFT Filter Banks
The main advantages of oversampled FBs are increased design freedom �see Chapters
� and �� and noise reducing properties �see Chapters � and ��� These advantages
come at the expense of increased computational cost caused by the need to process a
larger number of subband signal samples per unit of time� Therefore� oversampled FBs
allowing e�cient implementations are of particular interest� Oversampled DFT FBs
�also known as complex modulated FBs� ��� ��� ��� ��� ��� and oversampled cosine
modulated FBs �see Chapter �� ���� ��� �� ��� allow e�cient FFT� or DCT�based
implementations� It is well known that there are no critically sampled FIR DFT FBs
with good frequency localization � �� �� In the oversampled case� however� FIR DFT
FBs can be designed to have good frequency selectivity ���� ����
In this chapter� we discuss oversampled DFT FBs and their relation to Weyl�
Heisenberg �WH� frames ���� ��� �� in l��ZZ�� In particular� we shall describe the
construction of FIR� paraunitary� oversampled DFT FBs with good frequency localiza�
tion� We apply the theory of WH frames � �� �� � to FIR and IIR� oversampled DFT
FBs � �� ��� �� ��� ���� Although the connection between DFT FBs and short�time
Fourier transforms or Gabor expansions ��� �� �� �� �� �� � �� is well established
��� �� �� �� a frame�theoretic approach to DFT FBs has been proposed only recently
���� ��� ��� ���� We will not comment on the e�cient implementation of oversampled
DFT FBs� since this is discussed in great detail in ����
The organization of this chapter is as follows� In Section �� we discuss oversampled
DFT FBs and their relation to WH expansions� In Section ��� we provide time� fre�
quency� and polyphase domain representations of the DFT FB operator describing the
DFT FB�s input�output relation� Based on these representations� Section ��� provides
PR conditions in the time� frequency� and polyphase domain for arbitrary oversampling
factors� We furthermore give time� frequency� and polyphase domain parameterizations
of DFT synthesis FBs providing PR for a given oversampled DFT analysis FB� In Sec�
tion ��� we apply the theory of WH frames to oversampled DFT FBs� We provide
�

�� CHAPTER �� OVERSAMPLED DFT FILTER BANKS
time� frequency� and polyphase domain representations of the WH frame operator� The
important special case of integer oversampling is discussed in detail� In Section ���
we discuss a simple method for the design of oversampled FIR paraunitary DFT FBs�
Finally� Section ��� provides simulation results demonstrating the increased design free�
dom of oversampled DFT FBs�
��� DFT Filter Banks and WeylHeisenberg Sets
In the following we shall discuss two fundamental classes of DFT FBs� namely odd�
stacked and even�stacked DFT FBs ����
����� Odd�Stacked DFT FBs
The analysis and synthesis �lters of an odd�stacked DFT FB with N channels and
decimation factor M are derived from a single analysis prototype h�n� � H�z� and a
single synthesis prototype �lter f �n� � F �z�� respectively� through frequency�shifts by
integer multiples of �N � i�e���
hDFT�ok �n� ! h�n�W� k����nN � fDFT�ok �n� ! f �n�W
� k����nN � k ! �� � ���� N��
with WN ! e�j���N � or equivalently
HDFT�ok �z� ! H�zW
k���N � � FDFT�o
k �z� ! F �zWk���N � � k ! �� � ���� N��
This is illustrated in Fig� ��a��
The polyphase decomposition of the analysis prototype H�z� is given by
H�z� !M��Xn��
znEn�zM � with En�z� !
�Xm���
h�mM � n� z�m�
Note that furthermore
Ek�n�z� ! W k����nN En
�zW
M k����N
�� ����
so that the analysis polyphase matrix E�z� is fully determined by En�z� �n !
�� � ����M ��� Similarly� the polyphase decomposition of the synthesis prototype F �z�
reads
F �z� !M��Xn��
z�nRn�zM � with Rn�z� !
�Xm���
f �mM " n� z�m�
and there is Rk�n�z� ! W� k����nN Rn
�zW
M k����N
��
�The superscripts DFT�o and DFT�e indicate that the respective quantity belongs to an odd and
evenstacked DFT FB� respectively�
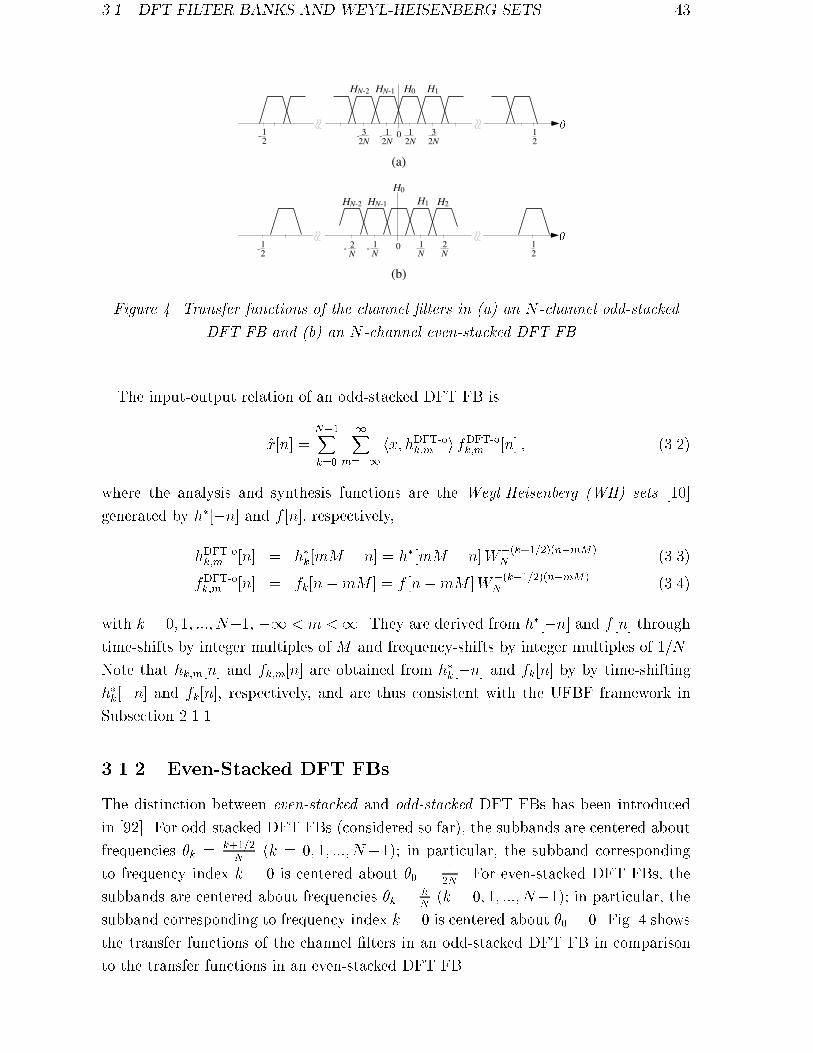
���� DFT FILTER BANKS AND WEYLHEISENBERG SETS ��
12N
-32N-1
2-
(a)
HN-2 HN-1 H0 H1
0 12N
32N
12
(b)
012-
HN-1
2N
- 1N
H0
H1
2N
1N
12
-
HN-2 H2
Figure �� Transfer functions of the channel �lters in a an N�channel odd�stacked
DFT FB and b an N�channel even�stacked DFT FB�
The input�output relation of an odd�stacked DFT FB is
x�n� !N��Xk��
�Xm���
hx� hDFT�ok�m i fDFT�ok�m �n� � �����
where the analysis and synthesis functions are the Weyl�Heisenberg WH sets ���
generated by h���n� and f �n�� respectively�
hDFT�ok�m �n� ! h�k�mM � n� ! h��mM � n�W� k���� n�mM�N �����
fDFT�ok�m �n� ! fk�n�mM � ! f �n�mM �W� k���� n�mM�N �����
with k ! �� � ���� N�� �� � m ��� They are derived from h���n� and f �n� throughtime�shifts by integer multiples of M and frequency�shifts by integer multiples of �N �
Note that hk�m�n� and fk�m�n� are obtained from h�k��n� and fk�n� by by time�shifting
h�k��n� and fk�n�� respectively� and are thus consistent with the UFBF framework in
Subsection ����
����� Even�Stacked DFT FBs
The distinction between even�stacked and odd�stacked DFT FBs has been introduced
in ���� For odd�stacked DFT FBs �considered so far�� the subbands are centered about
frequencies �k ! k���N
�k ! �� � ���� N��� in particular� the subband corresponding
to frequency index k ! � is centered about �� ! ��N
� For even�stacked DFT FBs� the
subbands are centered about frequencies �k ! kN
�k ! �� � ���� N��� in particular� the
subband corresponding to frequency index k ! � is centered about �� ! �� Fig� � shows
the transfer functions of the channel �lters in an odd�stacked DFT FB in comparison
to the transfer functions in an even�stacked DFT FB�

�� CHAPTER �� OVERSAMPLED DFT FILTER BANKS
The impulse responses and transfer functions of the analysis and synthesis �lters in
an even�stacked DFT FB with N channels and decimation factor M are given by
hDFT�ek �n� ! h�n�W�knN � fDFT�ek �n� ! f �n�W�kn
N � k ! �� � ���� N�
and
HDFT�ek �z� ! H�zW k
N� � FDFT�ek �z� ! F �zW k
N � � k ! �� � ���� N� �
respectively� and the corresponding polyphase components are
Ek�n�z� ! W knN En�z W
MkN � �����
Rk�n�z� ! W�knN Rn�z W
MkN ��
The input�output relation of an even�stacked DFT FB is ����� where the analysis and
synthesis functions are given by
hDFT�ek�m �n� ! h�k�mM � n� ! h��mM � n�W�k n�mM�N �����
fDFT�ek�m �n� ! fk�n�mM � ! f �n�mM �W�k n�mM�N �����
with k ! �� � ���� N�� �� � m ��� This is again consistent with the UFBF format
de�ned in Subsection ����
��� Representations of the DFT FB Operator
The reconstructed signal of an odd� or even�stacked DFT FB can be written as
x�n� ! �S h�f�DFTx��n�� ��� �
where
�S h�f�DFTx��n� !
N��Xk��
�Xm���
hx� hDFTk�m i fDFTk�m �n��
Here hDFTk�m �n� ! hDFT�ok�m �n�� fDFTk�m �n� ! fDFT�ok�m �n� in the odd�stacked case and hDFTk�m �n� !
hDFT�ek�m �n�� fDFTk�m �n� ! fDFT�ek�m �n� in the even�stacked case� We shall next provide time�
frequency� and polyphase domain representations of the operator S h�f�DFT � These repre�
sentations are the basis for the PR conditions given in Section ����
Time domain� In the time domain� the DFT FB operator S h�f�DFT can be expressed
as
�S h�f�DFTx��n� !
�Xl���
dl x�n� lN �
N
�Xm���
f �n�mM � h��n "mM " lN �
�����

���� REPRESENTATIONS OF THE DFT FB OPERATOR ��
with dl ! ���l in the odd�stacked case and dl ! in the even�stacked case�
Frequency domain� The frequency �z�transform� version �S h�f�
DFT ! ZS h�f�DFTZ
��
�with Z denoting the z�transform operator� of the DFT FB operator S h�f�DFT can be
expressed as
�S h�f�
DFTX��z� !
M��Xl��
X�zW lM �
M
N��Xk��
FDFTk �z�HDFT
k �zW lM �
������
with FDFTk �z� ! FDFT�o
k �z� ! F �z Wk���N �� HDFT
k �z� ! HDFT�ok �z� ! H�zW
k���N � in
the odd�stacked case and FDFTk �z� ! FDFT�e
k �z� ! F �z W kN �� H
DFTk �z� ! HDFT�e
k �z� !
H�z W kN� in the even�stacked case�
Polyphase domain� The polyphase components�
Y h�f�n �z� !
�Xm���
�S h�f�DFTx��n "mM � z�m
of �S h�f�DFTx��n� are related to the polyphase components Xn�z� !
P�m��� x�n"mM � z�m
of x�n� as
Y h�f�n �z� !
M
Q
Q��Xl��
dlXn�lN�z�P��Xi��
Rn�zWivP �En�lN�zW iv
P �� ����
where NM
! PQ
with� gcd�P�Q� ! � v ! � and dl ! in the even�stacked
case and v ! Q�
and dl ! ���l in the odd�stacked case� Introducing the
polyphase vectors yn�z� ! �d�Yn�z� d�Yn�N�z� ��� dQ��Yn� Q���N�z��T and xn�z� !
�d�Xn�z� d�Xn�N�z� ��� dQ��Xn� Q���N�z��T � ���� can be compactly written as ���
yn�z� ! S h�f�n �z�xn�z� �����
with the Q � Q matrices
S h�f�n �z� ! Rn�z�En�z� �����
for n ! �� � ����M�� The Q � P matrices Rn�z� and the P � Q matrices En�z� are
de�ned as
�Rn�z��k�l !
sM
QRn�kN�zW lv
P �� k ! �� � ���� Q� � l ! �� � ���� P�
�En�z��k�l !
sM
QEn�lN�zW kv
P �� k ! �� � ���� P � � l ! �� � ���� Q��
�Usually� the polyphase components are de ned only for n � �� �� ����M��� However� in view of
the quasiperiodicity relation Xn�lM �z� � zlXn�z�� where Xn�z� �P�
m��� x�n � mM � z�m� this
de nition can be extended to arbitrary n � ZZ��gcd�P�Q� denotes the greatest common divisor of P and Q�

�� CHAPTER �� OVERSAMPLED DFT FILTER BANKS
where v ! � in the even�stacked case and v ! Q�in the odd�stacked case� Note that
the polyphase representation ����� is not formulated in terms of the N � M analysis
polyphase matrix E�z� and the M � N synthesis polyphase matrix R�z� introduced
in Section ��� but rather in terms of the smaller matrices En�z� and Rn�z�� This
simpli�cation is possible because of the modulation structure inherent in DFT FBs�
Dual polyphase domain� Alternatively� in the case of DFT FBs we can de�ne
dual polyphase components as X �n�z� !
P�m��� x�mN " n� z�m �n ! �� � ���� N�� and
similarly for Y h�f��n � E �
n�z�� and R�n�z�� Note that the number of polyphase components
is now N instead of M � �For N ! M � i�e�� critical sampling� the dual polyphase
decomposition coincides with the polyphase decomposition�� In the dual polyphase
domain� the DFT FB operator is represented as
Y h�f��n �z� !
N
Q
Q��Xl��
X �n�zW
lQ�
P��Xi��
R�n�iM��z�E �n�iM��zW l
Q� �����
where � ! � in the odd�stacked case and � ! in the even�stacked case� The dual
polyphase matrix representation of S h�f�� i�e�� ����� formulated in terms of the dual
polyphase decomposition� can be obtained from ����� in a straightforward manner�
��� Perfect Reconstruction
From ��� � we can see that a DFT FB satis�es the PR property x�n� ! x�n� if and only
if S h�f�DFT ! I� In this case the output signal of the DFT FB can be written as
x�n� !N��Xk��
�Xm���
hx� hDFTk�m i fDFTk�m �n� � �����
where hDFTk�m �n� and fDFTk�m �n� are de�ned as in Section ���� Hence� a DFT FB with PR
provides an expansion of the input signal x�n� into the WH set fDFTk�m �n�� This expansion
is known as the �discrete�time� Gabor expansion ��� ��� ��� � �� Thus� PR DFT FBs
and Gabor expansions are mathematically equivalent ��� � � � ��� ��� ��� Based
on the representations of the DFT FB operator S h�f�DFT given in Section ���� we shall
next formulate PR conditions for oversampled DFT FBs in various domains� We shall
furthermore show that the PR condition is independent of the stacking type�
����� PR condition in the time domain
From ���� it follows that a DFT FB is PR if and only if ���
N�X
m���f �n�mM � h��n "mM " lN � ! ��l�� �����

���� PERFECT RECONSTRUCTION ��
Note that the PR condition is independent of the stacking type� Therefore� an even�
stacked DFT FB is PR if and only if the corresponding odd�stacked DFT FB with the
same number of channels� the same decimation factor� and the same prototypes is PR�
It can be seen that if prototypes h�n�� f �n� satisfy the PR property ����� in the critical
case� the scaled prototypespPh�n��
pPf �n� will satisfy this property in the case of
integer oversampling with oversampling factor P � For a given DFT analysis FB� the
minimum norm synthesis FB f fk�n�g is always a DFT FB ����� i�e�� fk�n� ! f �n�W�knN in
the even�stacked case and fk�n� ! f �n�W� k����nN in the odd�stacked case� this follows
immediately from the fact that the dual frame of a WH frame is again a WH frame ���
�cf� Section ����� However� in the oversampled case there are synthesis FBs providing
PR for a given DFT analysis FB that do not have DFT structure� Let us reconsider
the time�domain parameterization ������ in terms of the �lters pk�n�� In ���� it has been
shown in the context of WH frames that
pk�n� ! p�n�W� k��nN �����
with ! � in the even�stacked case and ! �� in the odd�stacked case is su�cient
for the synthesis FB to be a DFT FB� Inserting ����� in ������ we get
f �n� ! f �n� " p�n�� N�X
l��� f �n� lN �
�Xm���
h�mM � n" lN � p�n�mM �
�� ��� �
which is a parameterization of the synthesis prototype f �n� in terms of the single �lter
p�n� that may be chosen arbitrarily� Note that the minimum norm prototype f �n� is
reobtained for p�n� � �� The parameterization ��� � is valid for both odd�stacked and
even�stacked DFT FBs�
����� PR condition in the frequency domain
From ����� it follows that the PR condition in the frequency domain reads ����
M
N��Xk��
F�z W k
N
�H�zW k
NWlM
�! ��l� � ����
The parameterization ������ becomes
Fk�z� ! F �z W k�N � " Vk�z��
M
M��Xi��
F �z W iMW
k�N �
N��Xl��
H�z W iMW
l�N �Vl�z�� ������
where ! � in the even�stacked case and ! �� in the odd�stacked case� A su�cient
condition for the synthesis FB to have DFT structure is �cf� �����
Vk�z� ! V �z W k�N �� �����

� CHAPTER �� OVERSAMPLED DFT FILTER BANKS
which yields
F �z� ! F �z� " V �z��
M
M��Xi��
F �z W iM�
N��Xl��
H�zW iMW
lN �V �z W l
N �� ������
This parameterization of the synthesis prototype F �z� in terms of the single �lter V �z�
that may be chosen arbitrarily� Again this parameterization is valid for both the odd�
stacked and the even�stacked case�
����� PR condition in the polyphase domain
With ����� the PR condition in the polyphase domain is ��� ��� �� ��
M
Q
P��Xi��
Rn�zWivP �En�lN�zW iv
P � ! ��l�� ������
where v ! � in the even�stacked case and v ! Q�in the odd�stacked case� Rewriting
������ in terms of the matrices En�z� and Rn�z� from Section ���� we obtain
Rn�z�En�z� ! IQ � n ! �� � ����M�� ������
In the oversampled case N � M � Rn�z� is not uniquely determined for given En�z��
any solution of ������ can be written as
Rn�z� ! Rn�z� "Un�z� �IP �En�z� Rn�z��� n ! �� � ����M � ������
Here� Rn�z� is the para�pseudo�inverse of En�z�� which is a particular solution of ������
de�ned as Rn�z� ! �#En�z�En�z��
�� #En�z�� n ! �� � ����M �
and Un�z� is a Q � P matrix with elements �Un�z��k�l ! Un�kN�zW lvP �� where v !
� in the even�stacked case and v ! Q�
in the odd�stacked case� Note that for each
value of n with n ! �� � ����M � we can have a di�erent Un�z�� The matrices
Un�z� are fully determined by the M polyphase components Un�z� satisfying the quasi�
periodicity relation UnlM�z� ! zlUn�z�� Eq� ������ is a polyphase�domain version of
��� � and ������� Note that the parameterization ������ automatically implies that the
corresponding synthesis FB has DFT structure�
����� PR condition in the dual polyphase domain
Finally� it follows from ����� that S h�f�DFT ! I if and only if the following PR condition
in the dual polyphase domain is satis�ed�
P��Xi��
R�n�iM�z�E �n�iM�zW l
Q� !Q
N��l� � n ! �� � ���� N�� ������
A matrix formulation similar to ������ and a parameterization of all PR synthesis FBs
with DFT structure similar to ������ can easily be obtained�

���� FRAMETHEORETIC PROPERTIES �
��� FrameTheoretic Properties
A WH set fhDFTk�m �n�g that is a frame �cf� ������ is called a WH frame� WH frames are
an important special case of UFBFs� The dual frame fk�m�n� ! �S��hDFTk�m ��n� can be
shown to be again a WH frame ���� i�e��
fk�m�n� ! fDFT�ok�m �n� ! f �n�mM �W� k���� n�mM�N
in the odd�stacked case and
fk�m�n� ! fDFT�ek�m �n� ! f �n�mM �W�k n�mM�N
in the even�stacked case� The synthesis prototype is in both cases given by
f �n� ! f �n� ! �S��DFT�ehy��n� with hy�n� ! h���n� � ������
Here� S��DFT�e is the inverse of the WH frame operator in the even�stacked case� which
is given by SDFT�e ! S h�hy�DFT�e where S
h�f�DFT�e denotes the DFT FB operator in the even�
stacked case �see ����� Among all synthesis prototypes satisfying PR� ������ de�nes
the synthesis prototype with minimum energy �norm� ���� �� �� �� In the theory of
Gabor expansions �WH frames� the synthesis prototype given in ������ is also known
as Wexler�Raz dual ��� �� �� ��
We shall next show that an odd�stacked DFT FB provides a frame decomposition in
l��ZZ� if and only if the corresponding even�stacked DFT FB �with the same synthesis
prototype� provides a frame decomposition in l��ZZ�� We shall use the following
Lemma ���� The function set ff �n�mM � ej���k���N
ng with k ! �� � ���� N�� �� � m � � and � f�� ��g is a WH frame in l��ZZ� if and only if
the set ff �n�mM � ej���k���N
n�mM�g with k ! �� � ���� N�� �� � m ��is a WH frame in l��ZZ��
Proof� Straightforward manipulations reveal that the Walnut representations
�cf� ���� �� ��� of the frame operators corresponding to the sets ff �n�mM � ej���k���N
ngand ff �n � mM � ej��
�k���N
n�mM�g with k ! �� � ���� N � � �� � m � � and
� f�� ��g are equal� Therefore� the corresponding frame operators are equal� which
in turn proves the lemma� �
We are now able to formulate
Theorem ���� An odd�stacked DFT FB provides a frame decomposition in
l��ZZ� if and only if the corresponding even�stacked DFT FB with the same
synthesis prototype� the same number of channels and the same decimation
factor provides a frame decomposition in l��ZZ��

�� CHAPTER �� OVERSAMPLED DFT FILTER BANKS
Proof� Let us �rst consider the modi�ed synthesis functions fDFT�o�
k�m �n� ! f �n �mM �ej��
�k�����N
n� These can be obtained by applying a unitary transformation U �fre�
quency shift� to the fDFT�e�
k�m �n��
fDFT�o�
k�m �n� ! �UfDFT�e�
k�m ��n� ! fDFT�e�
k�m �n� ej�Nn�
where fDFT�e�
k�m �n� ! f �n � mM �ej��kNn� Note that this transformation is the same for
all functions fDFT�o�
k�m �n� with k ! �� � ���� N � � �� � m � �� Since kU �xk ! kxk�it follows from Theorem A�� that if ffDFT�e�k�m �n�g �k ! �� � ���� N � � �� � m � ��
is a frame for l��ZZ� then fDFT�o�
k�m �n� is also a frame for l��ZZ�� Moreover� it follows from
kUk ! that fDFT�o�
k�m �n� has the same frame bounds as fDFT�e�
k�m �n�� Noting that the
fDFT�e�
k�m �n� are obtained from the fDFT�o�
k�m �n� by means of the unitary transformation
�U��x��n� ! x�n� e�j�Nn�
the same arguments as above can be used to show the converse� The result in Theo�
rem �� then follows by employing Lemma ��� �
����� Representations of the Frame Operator
We shall next provide time� frequency� and polyphase domain representations of the
WH frame operator for odd� and even�stacked DFT FBs� These representations follow
easily from the representations of the DFT FB operator S h�f� given in Section ��� by
replacing f �n�� F �z� and Rn�z� by h���n�� #H�z� and #En�z�� respectively�
Time domain� The time domain representation of the WH frame operator� also
known as Walnut representation ���� reads
�Sx��n� !�X
l���dlx�n� lN �
N
�Xm���
h���n "mM � h��n "mM " lN �
�� ���� �
where dl ! ���l in the odd�stacked case and dl ! in the even�stacked case� The
inverse frame operator can be represented in a similar manner by replacing h�n� with
f ���n� in �����
Frequency domain� In the frequency domain� the WH frame operator can be
expressed as
� �SX��z� !M��Xl��
X�z W l
M
�
M
N��Xk��
#HDFTk �z�HDFT
k
�z W l
M
��� �����
where �S ! ZSZ�� is the frequency domain representation of S and HDFT
k �z� !
HDFT�ek �z� in the even�stacked case and HDFT
k �z� ! HDFT�ok �z� in the odd�stacked case�

���� FRAMETHEORETIC PROPERTIES �
The inverse frame operator can be represented in a similar manner by replacingHDFTk �z�
with #FDFTk �z� in ������
Polyphase domain� The polyphase components Yn�z� !P�
m����Sx��n"mM � z�m
are related to the polyphase components Xn�z� !P�
m��� x�mM " n� z�m as
Yn�z� !M
Q
Q��Xl��
dlXn�lN�z�P��Xi��
#En�zWivP �En�lN�zW iv
P �� ������
where v ! � and dl ! in the even�stacked case and v ! Q�and dl ! ���l in the odd�
stacked case� The polyphase vectors yn�z� ! �d�Yn�z� d�Yn�N�z� ��� dQ��Yn� Q���N�z��T
and xn�z� ! �d�Xn�z� d�Xn�N�z� ��� dQ��Xn� Q���N�z��T are related as ���
yn�z� ! Sn�z�xn�z� with Sn�z� ! #En�z�En�z� � �����
xn�z� ! S��n �z�yn�z� with S��n �z� ! Rn�z� #Rn�z�
for n ! �� � ����M�� where En�z� and Rn�z� have been de�ned in Section ���� This
representation of S in terms of M matrices Sn�z� of size Q � Q is known in WH
frame theory as the Zibulski�Zeevi representation of the WH frame operator ��� ����
In particular� the inversion of the frame operator&which� in the general UFBF case�
requires the inversion of the M �M UFBF matrix S�z�&here reduces to the inversion
of M matrices of size Q � Q� Note that in the case of integer oversampling �Q ! ��
i�e�� N ! PM � the matrices Sn�z� �n ! �� � ����M � � reduce even further to scalars
and hence the inversion of the frame operator is accomplished by simple divisions in the
polyphase domain� Integer oversampled DFT FBs are discussed in detail in Subsection
������
Dual polyphase domain� In the dual polyphase domain� the WH frame operator
is represented as
Y �n�z� !
�Xm���
�Sx��mN " n� z�m !N
Q
Q��Xl��
X �n�zW
lQ�
P��Xi��
#E �n�iM��z�E �
n�iM��zW lQ��
������
where � ! � in the odd�stacked case and � ! in the even�stacked case�
����� Time�Limited Prototype
If h�n� has �nite length � N � it follows from ���� � that the corresponding WH frame
operator S is a multiplication operator in the time domain� i�e�
�Sx��n� ! bh�n� x�n� � �S��x��n� !x�n�
bh�n�� ������
where the factor bh�n� is a periodized version of jh��n�j��
bh�n� ! N�X
m���jh��n "mM �j�� ������

�� CHAPTER �� OVERSAMPLED DFT FILTER BANKS
For bh�n� � A the DFT FB is paraunitary with frame bound A� Note that the parau�
nitarity condition is independent of the stacking type�
����� Band�Limited Prototype
If h�n� is band�limited in a frequency interval of length � �M � clearly all the modulated
versions of h�n� are band�limited within an interval of length � �M � In this case
the FB is diagonal in the frequency domain �see Subsection ������ and hence S is a
multiplication operator in the frequency domain� i�e��
� �SX��ej���� ! Gh���X�ej���� � � �S��X��ej���� !
X�ej����
Gh����
Here� �S ! FSF�� �with F denoting the Fourier transform operator� and the factor
Gh��� is a periodized version of jH�ej����j��
Gh����!
M
N��Xk��
���H�ej�� �� kN����
����� � ������
where �� ! � in the even�stacked case and �� !��N
in the odd�stacked case� For Gh��� �A� the DFT FB is paraunitary with frame bound A� Note that the paraunitarity
condition is again independent of the stacking type�
����� Paraunitarity Conditions
Using the Walnut representation ���� � of the WH frame operator� the time�domain
condition for paraunitarity with frame bound A is obtained as
N�X
m���h���n "mM � h��n "mM " lN � ! A��l� �
In the frequency domain �see ������� the paraunitarity condition reads
M
N��Xk��
#H�z W k
N
�H�z W k
N W lM
�! A��l� �
The paraunitarity condition in the polyphase domain reads �cf� �������
M
Q
P��Xi��
#En�z WivP �En�lN�zW iv
P � ! A��l��
with v ! � in the even�stacked case and v ! QP�
in the odd�stacked case� Using the
Zibulski�Zeevi representation ������ we can see that a DFT FB is paraunitary with
frame bound A if and only if
Sn�z� ! A IQ for n ! �� � ����M��

���� FRAMETHEORETIC PROPERTIES ��
In the dual polyphase domain �cf� ������� the paraunitarity condition reads
N
Q
P��Xi��
#E �n�iM�z�E �
n�iM �z W lQ� ! A��l��
Note that these paraunitarity conditions formally equal the PR conditions in Section ���
with f �n�� F �z�� Rn�z�� and R�n�z� replaced by h���n�� #H�z�� #En�z�� and #E �n�z�� respec�
tively�
����� Integer Oversampling
Let us consider an integer oversampled DFT FB �N ! PM with P � IN�� Using
N ! PM in ���� and ������ the elements of the UFBF matrix S�z� ! #E�z�E�z� are
obtained as Sn�n��z� !PN��
k�� W kv� n��n�N
#En�zWkvP �En��zW
kvP �� where v ! � in the
even�stacked case and v ! �� in the odd�stacked case� Substituting k � lP " r �l !
�� � ����M � � r ! �� � ���� P � �� we �nally obtain
Sn�n��z� ! MP��Xi��
#En�zWivP �En�zW
ivP � ��n��n� � n ! �� � ���M�� n� ! �� � ���M��
������
which shows that the UFBF matrix S�z� is diagonal with diagonal elements
Sn�n�z� ! MP��Xi��
#En�zWivP �En�zW
ivP ��
Therefore� integer oversampled DFT FBs are diagonal in the polyphase domain �see
Section ������ The Q � Q matrices Sn�z� here reduce to scalars since Q ! and
furthermore S�z� ! diagfSn�z�gM��n�� or equivalently Sn�n�z� ! Sn�z��
The eigenvalues of S�ej���� follow from the frequency responses En�ej���� of the anal�
ysis prototype�s polyphase components according to
n��� ! Sn�n�ej���� ! M
P��Xi��
���En
�ej�� ��
i�vP
������ �
Hence� it follows that an integer oversampled DFT FB corresponds to a WH frame if
and only if
ess inf�� ������ n���������M��
Sn�n�ej���� � �� ess sup
�� ������ n���������M��Sn�n�e
j���� � ��
and that the �tightest possible� frame bounds are given by
A ! ess inf�� ������ n���������M��
Sn�n�ej���� � B ! ess sup
�� ������ n���������M��Sn�n�e
j���� �

�� CHAPTER �� OVERSAMPLED DFT FILTER BANKS
Note that the frequency responses En�ej���� of the analysis prototype�s polyphase com�
ponents determine the frame bounds �numerical properties� of the FB� An integer over�
sampled DFT FB is paraunitary with frame bound A if and only if
Sn�n�z� � A for n ! �� � ����M�� ������
It follows from ����� that the polyphase components of the minimum norm synthesis
prototype are given by
Rn�z� !#En�z�
Sn�n�z��
Thus� in the case of integer oversampling the synthesis prototype can be calculated in
the polyphase domain by simple divisions and the matrix inversion in ������ is avoided�
According to Theorem �� and the discussion at the end of Section ����� a paraunitary
FB can be constructed by factoring the matrix S�z� of an arbitrary FB corresponding to
a frame� For integer oversampled DFT FBs� this factorization reduces to a factorization
of polynomials �FIR case� or rational functions �IIR case� in z��� Let En�z� be the
analysis polyphase components of an integer oversampled DFT FB corresponding to a
WH frame in l��ZZ�� Furthermore� let Pn�z� be such that
P �n�z� ! Sn�n�z� ! M
P��Xi��
#En�zWivP �En�zW
ivP � and #Pn�z� ! Pn�z� ���� �
with Pn�ej���� � �� v ! � in the even�stacked case and v ! �� in the odd�stacked
case� Then using ������ with ���� and ������ it follows that the DFT FB with analysis
polyphase components
E p�n �z� !
En�z�
Pn�z�
is paraunitary with frame bound A ! � i�e�� #E p��z�E p��z� ! IM �
In the special case of critical sampling �P ! �� we have
Sn�n�z� ! M #En��z�En��z� � n��� ! Sn�n�ej���� ! M jEn�e
j�� ��v��j� �
where � ! in the even�stacked case and � ! � in the odd�stacked case� In this case
the above relations simplify accordingly� In particular� ������ reduces to
#En�z�En�z� !A
Mfor n ! �� � ����M� �
or jEn�ej����j� � A�M � which means that the polyphase �lters En�z� are allpass �l�
ters� Thus� the design of a critically sampled paraunitary DFT FB reduces to �nd�
ing an arbitrary set of M allpass �lters� Furthermore� ���� � simpli�es to P �n�z� !
M #En��z�En��z��
In � �� � it has been shown that for critical sampling� a DFT FB with FIR �lters in
both the analysis and the synthesis section is possible only if all the polyphase �lters are

���� DESIGN OF OVERSAMPLED FIR PARAUNITARY DFT FILTER BANKS ��
pure delays� This leads to �lters with poor frequency selectivity� In ���� this e�ect has
been interpreted as a discrete�time equivalent of the Balian�Low theorem ���� In the
oversampled case� this restriction is relaxed� More generally� a necessary and su�cient
condition for an oversampled FB to have FIR analysis and FIR minimum norm synthesis
�lters is det �#E�z�E�z�� ! C with C ! � �see Theorem ����� For integer oversampling�#E�z�E�z� is a diagonal matrix and thus the condition reads
det�#E�z�E�z�� !M��Yn��
� #E�z�E�z��n�n !M��Yn��
M
P��Xi��
#En�zWivP �En�zW
ivP �
�! C�
For example� in the even�stacked case for P ! �� the above condition can be satis�ed
by choosing the polyphase �lters En�z� such that the power symmetry conditions
#En�z�En�z� " #En��z�En��z� ! Cn� n ! �� � ����M �
hold with some Cn� These polyphase �lters are not necessarily pure delays ���� In
particular� a paraunitary FIR DFT FB with frame bound A can be constructed by
choosing polyphase �lters satisfying the power symmetry conditions ��� �cf� �������
#En�z�En�z� " #En��z�En��z� !A
Mfor n ! �� � ����M��
It is well known that the above power symmetry condition can be satis�ed with non�
trivial FIR �lters ����
��� Design of Oversampled FIR Paraunitary DFT
Filter Banks
Oversampled FIR paraunitary DFT FBs constitute a practically important subclass of
oversampled DFT FBs� One possible method to design oversampled FIR paraunitary
DFT FBs �even�stacked or odd�stacked� is to use a constrained optimization approach�
where the side constraints are given by the paraunitarity condition� The cost function
can for example be chosen such that the prototype�s stopband energy is minimized� In
this section� we shall present an alternative method that allows an explicit construction
of paraunitary prototypes� This method does not� however� allow to incorporate the
frequency selectivity of the �lters explicitly� Nonetheless� we shall give some hints how
to obtain good frequency selectivity� Our method is furthermore restricted to prototypes
of length � N � where N denotes the number of channels� For longer prototypes one
can use the approach presented in Section ������ In fact� the method presented here
can be considered as a special case of the method presented in Section ������ For an
analysis prototype h�n� supported in an interval of length N � the WH frame operator

�� CHAPTER �� OVERSAMPLED DFT FILTER BANKS
10 20 30−0.2
0
0.2
0.4
0.6
0.8
1
(a)10 20 30
−0.2
0
0.2
0.4
0.6
0.8
1
(b)
0 0.1 0.2 0.3 0.4−70
−60
−50
−40
−30
−20
−10
(c)
Mag
nitu
de(d
B)
0 0.1 0.2 0.3 0.4−70
−60
−50
−40
−30
−20
−10
(d)M
agni
tude
(dB
)
Figure �� Construction of paraunitary DFT FBs N ! ���M ! ��a Initial nonparaunitary prototype h�n�� b paraunitary prototype h p��n��
c H�ej����� d H p��ej�����
is a multiplication operator �see �������� Thus� the inverse square root S���� is also a
multiplication operator and we have
�S����x��n� !x�n�qbh�n�
with bh�n� given by ������� For a given nonparaunitary prototype h�n� supported within
an interval of length N � the corresponding paraunitary prototype h p��n� is hence given
by
h p��n� ! �S����h��n� !h�n�qbh�n�
�
In general� the resulting paraunitary prototype h p��n� may not have good frequency
selectivity� However� choosing the initial prototype h�n� such that it has good frequency
selectivity and that
s�!
maxn
bh�n�
minn
bh�n� �
it is guaranteed that the resulting paraunitary prototype h p��n� will have reasonable
frequency selectivity as well� This is so� since for s the paraunitary prototype
satis�es h p��n� h�n�� Although these restrictions on the choice of the initial prototype
h�n� seem to be very stringent� we observed that in practice this goal can be achieved

���� SIMULATION RESULTS ��
20 40 60 80 100 120−0.2
0
0.2
0.4
0.6
0.8
1
(a)20 40 60 80 100 120
−0.2
0
0.2
0.4
0.6
0.8
1
(b)
0 0.1 0.2 0.3 0.4−70
−60
−50
−40
−30
−20
−10
(d)M
agni
tude
(dB
)
0 0.1 0.2 0.3 0.4−70
−60
−50
−40
−30
−20
−10
(c)
Mag
nitu
de(d
B)
Figure �� Construction of paraunitary DFT FBs N ! � �M ! ��a Initial nonparaunitary prototype h�n�� b paraunitary prototype h p��n��
c H�ej����� d H p��ej�����
rather easily� Fig� � shows the construction of a paraunitary prototype of length ��
for N ! �� and M ! � �i�e�� oversampling by ��� using an initial prototype h�n� with
s ! �� Fig� � shows the construction of a paraunitary prototype of length � for
N ! � and M ! � �i�e�� oversampling by �� using an initial prototype h�n� with
s ! ���
��� Simulation Results
In this section we present two simulation results demonstrating the increased design
freedom of oversampled DFT FBs�
Example �� In the �rst example we consider a ���channel DFT FB �even�stacked
or odd�stacked� with oversampling by � The analysis prototype h�n� �see Fig� ��a�� is
supported within an interval of length N ! ��� which implies that the frame operator
S is a multiplication operator �see Section ������� Therefore according to ������ the
minimum norm synthesis prototype is given by
f �n� !h���n�bh�n�
�
Fig� ��b� shows the minimum norm synthesis prototype f �n� corresponding to the anal�
ysis prototype in Fig� ��a�� Although the analysis prototype had reasonable frequency

� CHAPTER �� OVERSAMPLED DFT FILTER BANKS
selectivity� the corresponding minimum norm synthesis prototype f �n� has poor fre�
quency selectivity �the attenuation of the �rst sidelobe is only about �dB��
Since the FB is oversampled� the PR synthesis prototype is not unique� Using the
parameterization ��� � with an arbitrary window function p�n� that is also supported
within an interval of length N ! ��� we get the following parameterization of synthesis
prototypes providing PR�
f �n� !h���n�
NP�
m��� jh��n "mM �j��N
�Xm���
h��n "mM � p�n �mM �
�" p�n��
�����
Note that this is not the most general parameterization of synthesis prototypes providing
PR since the function p�n� has been assumed to be supported within an interval of length
N � whereas in general� p�n� can have arbitrary support� We designed a PR synthesis
prototype by performing an unconstrained optimization over all synthesis prototypes
parameterized by ������ the parameter function p�n� was chosen such that the cost
function J !���R����
jF �ej����j� d� was minimized� The result is depicted in Fig� ��c�� One
can see that the attenuation of the �rst sidelobe is about ��dB� which is dB better
than for the minimum norm synthesis prototype� Finally� in order to demonstrate how
much design freedom there really is for oversampling factor � we chose the parameters
p�n� as random numbers and obtained the PR synthesis prototype depicted in Fig� ��d��
Hence� for oversampling factors as high as there is a large amount of design freedom�
Example �� The second example serves to demonstrate that if the oversampling
factor is not high enough there is not enough design freedom to substantially improve
the synthesis �lter quality� We simulated a DFT FB with N ! � channels and deci�
mation factor M ! � i�e�� oversampling by a factor of �� Figs� �a� and �b� show the
analysis prototype and the minimum norm synthesis prototype� respectively� Figs� �c�
and �d� show optimized synthesis prototypes� The synthesis prototype in Fig� �c� was
obtained by minimizing the energy of the synthesis �lter in the stopband region �here�
the passband was assumed to range from � to �N ! ���� The prototype in Fig� �d�
was obtained by minimizing the �rst derivative of the prototype�s transfer function
at � ! �� PR was guaranteed by performing an unconstrained optimization over all
synthesis prototypes parameterized by ������ One can observe that all synthesis pro�
totypes look very similar� This is so� because oversampling by � o�ers considerably less
design freedom than oversampling by as in the previous example� We observed that�
for most practical applications� oversampling factors of � or greater are necessary to
have a reasonable amount of design freedom�

���� SIMULATION RESULTS �
0 0.1 0.2 0.3 0.4
−60
−40
−20
0
(a)
Mag
nitu
de(d
B)
Frequency response
0 0.1 0.2 0.3 0.4
−60
−40
−20
0
(b)
Mag
nitu
de(d
B)
Frequency response
0 0.1 0.2 0.3 0.4−70
−60
−50
−40
−30
−20
−10
(c)
Mag
nitu
de(d
B)
Frequency response
0 0.1 0.2 0.3 0.4
−60
−40
−20
0
(d)M
agni
tude
(dB
)
Frequency response
Fig� �� ���channel DFT �lter bank with oversampling factor � a analysis
prototype� b minimum norm PR synthesis prototype� c PR synthesis prototype
with optimum frequency selectivity� d �random� PR synthesis prototype�
0 0.1 0.2 0.3 0.4−70
−60
−50
−40
−30
−20
−10
(d)
Mag
nitu
de(d
B)
Frequency response
0 0.1 0.2 0.3 0.4−70
−60
−50
−40
−30
−20
−10
(c)
Mag
nitu
de(d
B)
Frequency response
0 0.1 0.2 0.3 0.4−70
−60
−50
−40
−30
−20
−10
(b)
Mag
nitu
de(d
B)
Frequency response
0 0.1 0.2 0.3 0.4−70
−60
−50
−40
−30
−20
−10
(a)
Mag
nitu
de(d
B)
Frequency response
Fig� � ���channel DFT �lter bank with oversampling factor �� a analysis
prototype� b minimum norm PR synthesis prototype� c PR synthesis prototype
with �improved� frequency selectivity� d �smooth� PR synthesis prototype�


Chapter �
Oversampled Cosine Modulated
Filter Banks
Oversampled cosine modulated FBs �CMFBs� ���� ��� ��� �� allow e�cient DCT�DST�
based implementations� As compared to DFT FBs� CMFBs are advantageous since their
subband signals are real�valued for real�valued input signal and analysis prototype�
It seems that so far only critically sampled CMFBs have been considered in the
literature ��� �� �� � � ��� �� ��� ��� �� ��� This chapter introduces and
studies oversampled CMFBs with PR� The chapter is organized as follows� Sections ��
and ��� introduce two types of oversampled CMFBs� thereby extending a classi�cation
of CMFBs recently proposed for critical sampling by Gopinath ����� The �odd�stacked�
CMFBs introduced in Section �� extend the traditional CMFB type ��� � � ���
�� �� �� ��class B CMFBs� ����� to the oversampled case� The �even�stacked� CMFBs
introduced in Section ��� extend the �class A CMFBs� recently introduced for critical
sampling by Gopinath ���� to the oversampled case� This latter class contains CMFBs
previously proposed �for critical sampling� by Lin and Vaidyanathan ���� and the
Wilson�type CMFBs introduced in ����� Even�stacked CMFBs are attractive since they
allow both PR�paraunitarity and linear phase �lters in all channels� The linear phase
property is of particular interest for image coding applications �����
Section ��� shows that odd� and even�stacked CMFBs are closely related to odd� and
even�stacked DFT FBs� respectively� whose oversampling factor is twice that of the
CMFB� We also show that even�stacked CMFBs are related to MDFT FBs ���� ���
��� ����
Section ��� provides PR conditions for oversampled CMFBs� These conditions are
formulated in the time� frequency� and polyphase domains� They are shown to consist
of two parts� one of them being the PR condition in a DFT FB of the same stacking
type and with twice the oversampling factor� Furthermore� a uni�ed framework for
CMFBs with critical sampling or oversampling is developed�
�

�� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
In Section ��� we discuss frame�theoretic properties of oversampled CMFBs� We
formulate conditions on oversampled CMFBs to correspond to a frame decomposition
in l��ZZ� and we provide paraunitarity conditions� We show that the frame operator of
an oversampled CMFB is related to that of a DFT FB with the same stacking type and
with twice the oversampling factor� and that the frame bound ratio of a CMFB equals
that of the associated DFT FB�
Section ��� discusses design methods for oversampled CMFBs and presents design
examples� We propose a design procedure based on constrained optimization� Fur�
thermore� an iterative design procedure recently introduced in ���� for the design of
near�PR� odd�stacked� critically sampled CMFBs is adapted to the design of odd�stacked
and even�stacked PR CMFBs with arbitrary oversampling� The resulting algorithm is
found to have good convergence properties and allows for the design of prototypes with
up to ��� taps� Next� the lattice design method introduced in � � for critically sam�
pled odd�stacked CMFBs is extended to odd� and even�stacked CMFBs with integer
oversampling� We �nally present a design example that demonstrates the increased
design freedom in oversampled CMFBs�
Section ��� discusses the e�cient implementation of oversampled CMFBs� Finally�
in Section �� we propose a new subband image coding scheme based on even�stacked
CMFBs �� �� The structure of even�stacked CMFBs requires a modi�cation of the
quantization matrix and the zig�zag sequence used in the JPEG standard� We show
that our lossy subband image coding scheme using even�stacked CMFBs and entropy
coding outperforms odd�stacked CMFBs from a perceptual point of view while achieving
comparable rate�distortion performance as DCT�based JPEG schemes�
��� Oversampled OddStacked CMFBs
In spite of the advantages of oversampled FBs described in Chapter �� it appears that so
far only CMFBs with critical sampling have been considered� In this section� we extend
the conventional type of CMFBs ��� �� �� � � ��� �� �� �� �termed �class B�
in ����� to the oversampled case� We shall call this CMFB type �odd�stacked� due to
its close relation to odd�stacked DFT FBs �cf� Section �����
In the following� h�n� and f �n� denote the analysis and synthesis prototype� respec�
tively� which may be FIR or IIR �lters� We de�ne the analysis and synthesis �lters of
an odd�stacked CMFB with N channels and decimation factorM �note that the CMFB
is oversampled for N � M� as�
hCM�ok �n� !
p� h�n� cos
��k " ����
Nn" ok
�����
�The superscripts CM�o and CM�e indicate that the respective quantity belongs to an odd and
evenstacked CMFB� respectively�

���� OVERSAMPLED ODDSTACKED CMFBS ��
fCM�ok �n� !
p� f �n� cos
��k " ����
Nn� ok
������
for k ! �� � ���� N�� Extending the phase de�nition given for critical sampling �N ! M�
by Gopinath and Burrus ���� to the oversampled case� we de�ne the phases ok as
ok ! � �
�N
k "
�
�" r
�
�with � ZZ � r � f�� g �
The choice r ! corresponds to replacing the cos in ���� and ����� by �sin and sin�
respectively� The above phase expression contains the phases proposed in ��� �� ��
� � � � as special cases� The transfer functions of the analysis and synthesis �lters
in an odd�stacked CMFB are
HCM�ok �z� !
p�
hH�zW
k����N
�ej�
ok "H
�zW
� k�����N
�e�j�
ok
i� k ! �� � ���� N� �����
FCM�ok �z� !
p�
hF�zW
k����N
�e�j�
ok " F
�zW
� k�����N
�ej�
ok
i� k ! �� � ���� N�� �����
Note that the channel frequencies in an odd�stacked CMFB are �k ! k����N
� In partic�
ular� the channel with index k ! � is centered at frequency �� ! ��N
� Fig� compares
the transfer functions of an odd�stacked CMFB and those of an odd�stacked DFT FB
with twice the number of channels�
The input�output relation in an odd�stacked CMFB with N channels and decimation
factor M is
xCM�o�n� !N��Xk��
�Xm���
hx� hCM�ok�m i fCM�o
k�m �n� � �����
with the analysis and synthesis functions
hCM�ok�m �n� ! hCM�o�
k �mM � n�!p� h��mM � n� cos
��k " ����
N�mM � n� " ok
������
fCM�ok�m �n� ! fCM�o
k �n�mM �!p� f �n�mM � cos
��k " ����
N�n�mM�� ok
�� �����
Note that the analysis and synthesis functions are time�shifted versions of h�k��n� andfk�n�� respectively� and thus consistent with the UFBF format de�ned in Section ����
An important disadvantage of odd�stacked CMFBs is that the channel �lters do not
have linear phase even if the prototypes have linear phase ����� �Linear phase �lters are
especially important in image coding applications� where nonlinear phase �lters lead to
undesirable artifacts in the reconstructed image ���� � ��� Other important aspects of
odd�stacked CMFBs� such as their relation to DFT FBs� PR conditions� frame theoretic
properties� design� and implementation� will be considered in Sections ���'����
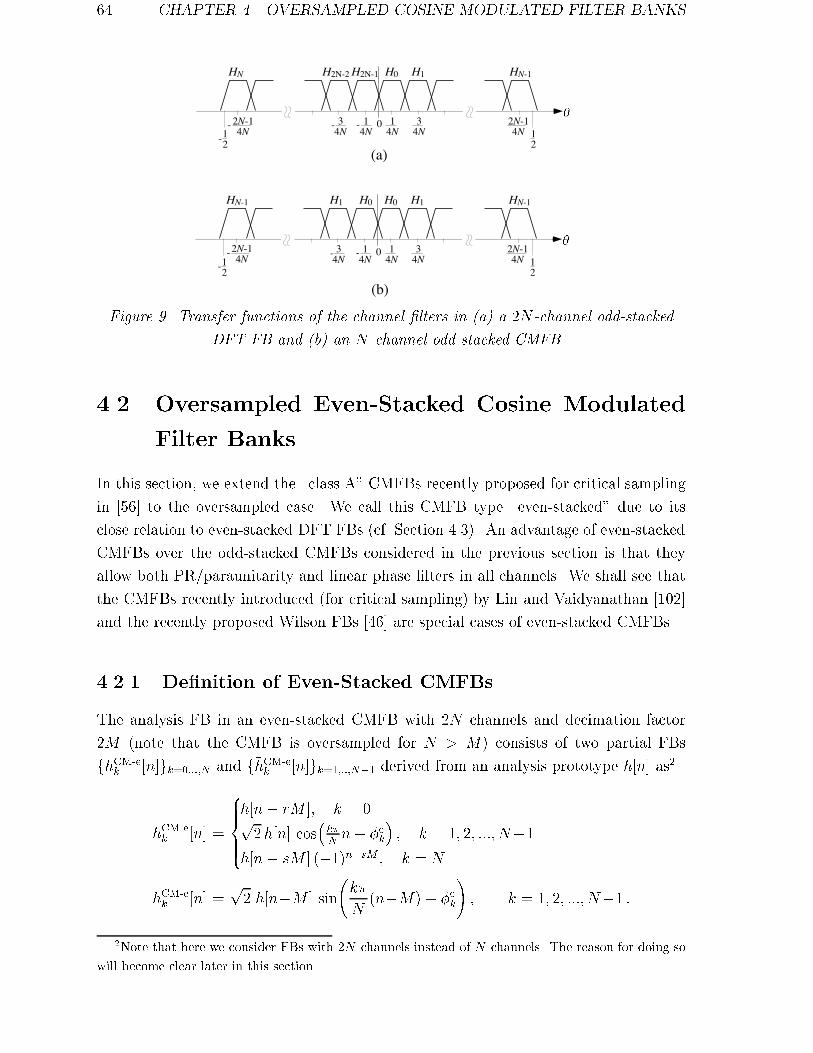
�� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
14N
-34N
-2N-14N
-12
-
(a)
HN H2N-2 H2N-1 H0 H1
0 14N
34N
2N-14N 1
2
HN-1
14N
-34N
-2N-14N
-12
-
(b)
HN-1 H1 H0 H0 H1
0 14N
34N
2N-14N 1
2
HN-1
Figure �� Transfer functions of the channel �lters in a a �N�channel odd�stacked
DFT FB and b an N�channel odd�stacked CMFB�
��� Oversampled EvenStacked Cosine Modulated
Filter Banks
In this section� we extend the �class A� CMFBs recently proposed for critical sampling
in ���� to the oversampled case� We call this CMFB type �even�stacked� due to its
close relation to even�stacked DFT FBs �cf� Section ����� An advantage of even�stacked
CMFBs over the odd�stacked CMFBs considered in the previous section is that they
allow both PR�paraunitarity and linear phase �lters in all channels� We shall see that
the CMFBs recently introduced �for critical sampling� by Lin and Vaidyanathan ����
and the recently proposed Wilson FBs ���� are special cases of even�stacked CMFBs�
����� Denition of Even�Stacked CMFBs
The analysis FB in an even�stacked CMFB with �N channels and decimation factor
�M �note that the CMFB is oversampled for N � M� consists of two partial FBs
fhCM�ek �n�gk������N and f(hCM�e
k �n�gk������N�� derived from an analysis prototype h�n� as�
hCM�ek �n� !
���������h�n� rM �� k ! �p�h�n� cos
�k�Nn" ek
�� k ! � �� ���� N�
h�n� sM � ���n�sM � k ! N
(hCM�ek �n� !
p� h�n�M � sin
�k�
N�n�M� " ek
�� k ! � �� ���� N� �
�Note that here we consider FBs with �N channels instead of N channels� The reason for doing so
will become clear later in this section�

���� OVERSAMPLED EVENSTACKED CMFBS ��
Similarly� the synthesis FB consists of two partial FBs ffCM�ek �n�gk������N and
f (fCM�ek �n�gk���������N�� derived from a synthesis prototype f �n� as
fCM�ek �n� !
���������f �n" rM �� k ! �p� f �n� cos
�k�Nn� ek
�� k ! � �� ���� N�
f �n" sM � ���nsM � k ! N
(fCM�ek �n� ! �
p� f �n"M � sin
�k�
N�n"M�� ek
�� k ! � ���� N� �
Extending the phase de�nition given for critical sampling in ����� we de�ne the phases
as
ek ! � �
�Nk " r
�
�with � ZZ � r � f�� g �
furthermore� s � f�� g with s ! r for even and s ! � r for odd�
The transfer functions of the analysis and synthesis �lters in an even�stacked CMFB
are
HCM�ek �z� !
���������z�rM H�z�� k ! ��p�
hH�zW k
�N � ej�ek "H�zW�k
�N � e�j�ek
i� k ! � �� ���� N�
z�sMH��z�� k ! N
��� �
(HCM�ek �z� !
jp�z�M
hH�zW k
�N � ej�ek �H�zW�k
�N � e�j�ek
i� k ! � �� ���� N� � ����
and
FCM�ek �z� !
���������zrM F �z�� k ! ��p�
hF �zW k
�N � e�j�e
k " F �zW�k�N � ej�
ek
i� k ! � �� ���� N�
zsMH��z�� k ! N
�����
(FCM�ek �z� ! �
jp�zMhF �zW k
�N � e�j�e
k � F �zW�k�N � ej�
ek
i� k ! � �� ���� N� �����
respectively� Note that an even�stacked CMFB has �N channels but there are only
N " di�erent channel frequencies �k ! k�N
�k ! �� ���� N�� as depicted in Fig� ��b��
In particular� the k ! � channel is centered at frequency �� ! �� which is an important
di�erence from odd�stacked CMFBs where the k ! � channel is centered at �� !��N
�
The input�output relation in an even�stacked CMFB with �N channels and decima�
tion factor �M is
xCM�e�n� !�N��Xk��
�Xm���
hx� hCM�ek�m i fCM�e
k�m �n�� �����
with the analysis and synthesis functions
hCM�ek�m �n� !
��� hCM�e�
k ��mM � n� � k ! �� � ���� N
(hCM�e�
k�N ��mM � n� � k ! N " � N " �� ���� �N � �����
fCM�ek�m �n� !
��� fCM�e
k �n� �mM � � k ! �� � ���� N
(fCM�ek�N �n� �mM � � k ! N " � N " �� ���� �N � �
�����
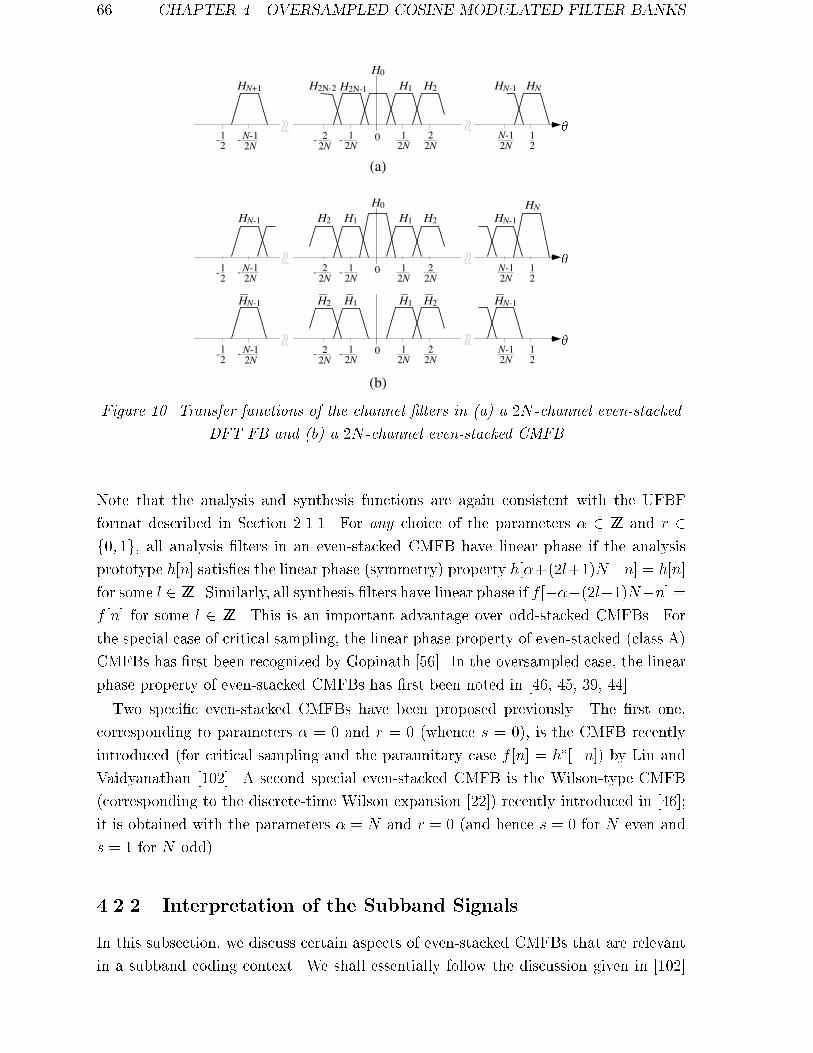
�� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
(b)
0
0
HNHN-1
12
- N-12N
-
H1H2
22N
- 12N
-
H0
H1 H2
22N
12N
HN-1
N-12N
12
12-
N-12N
- 22N
- 12N
- 22N
12N
N-12N
12
HN-1 H2 H1 H1 H2 HN-1
(a)
0
HNHN+1
12
- N-12N
-
H2N-1H2N-2
22N
- 12N
-
H0
H1 H2
22N
12N
HN-1
N-12N
12
Figure ��� Transfer functions of the channel �lters in a a �N�channel even�stacked
DFT FB and b a �N�channel even�stacked CMFB�
Note that the analysis and synthesis functions are again consistent with the UFBF
format described in Section ���� For any choice of the parameters � ZZ and r �f�� g� all analysis �lters in an even�stacked CMFB have linear phase if the analysis
prototype h�n� satis�es the linear phase �symmetry� property h�"��l"�N�n� ! h�n�
for some l � ZZ� Similarly� all synthesis �lters have linear phase if f �����l"�N�n� !f �n� for some l � ZZ� This is an important advantage over odd�stacked CMFBs� For
the special case of critical sampling� the linear phase property of even�stacked �class A�
CMFBs has �rst been recognized by Gopinath ����� In the oversampled case� the linear
phase property of even�stacked CMFBs has �rst been noted in ���� ��� �� ����
Two speci�c even�stacked CMFBs have been proposed previously� The �rst one�
corresponding to parameters ! � and r ! � �whence s ! ��� is the CMFB recently
introduced �for critical sampling and the paraunitary case f �n� ! h���n�� by Lin and
Vaidyanathan ����� A second special even�stacked CMFB is the Wilson�type CMFB
�corresponding to the discrete�time Wilson expansion ����� recently introduced in �����
it is obtained with the parameters ! N and r ! � �and hence s ! � for N even and
s ! for N odd��
����� Interpretation of the Subband Signals
In this subsection� we discuss certain aspects of even�stacked CMFBs that are relevant
in a subband coding context� We shall essentially follow the discussion given in ����

���� OVERSAMPLED EVENSTACKED CMFBS ��
for critically sampled paraunitary Lin�Vaidyanathan FBs� As we shall see� the interpre�
tations and conclusions given in ���� apply to even�stacked CMFBs in general� For the
sake of simplicity� we restrict our attention to critically sampled even�stacked CMFBs
with �N channels� however� our discussion can easily be extended to the oversampled
case�
In a conventional �N �channel FB with critical sampling� the total bandwidth �includ�
ing positive and negative frequencies� of the channel �lters is roughly ��N
� The output
of the channel �lters is decimated by �N �critical sampling�� Clearly� this decimation
causes only aliasing due to the non�ideal bandlimiting property of the channel �lters�
In a PR FB� this aliasing is cancelled by the synthesis �lters�
In a �N �channel even�stacked CMFB� each channel �lter has total bandwidth �N
�see Fig� ��b��� i�e� twice the bandwidth of a channel �lter in a conventional �N �
channel FB� Yet� the output signals of the channel �lters in the even�stacked CMFB
are decimated by �N � This decimation does� of course� lead to severe aliasing even
if the channel �lters are ideal bandpass �lters� In an even�stacked CMFB with PR�
even this aliasing is still cancelled by the synthesis �lters� However� the meaning of the
subband signals in an even�stacked CMFB is di�erent from that of the subband signals
in a conventional �N �channel CMFB� In a conventional �N �channel FB� the subband
signals represent the spectral content of the input signal in the corresponding frequency
band� In an even�stacked CMFB there are two �lters for each subband� namely� Hk�z�
and (Hk�z� �k ! � �� ���� N � �� which cover the same frequency region� We shall show
in the following that the corresponding subband signals taken together retain the usual
meaning of a subband signal� This means that it is still possible to exploit the energy
distribution of the input signal in the usual way� in the sense that the number of bits
assigned to the subband quantizers can be chosen to be proportional to the spectral
content of the input signal in the corresponding frequency band�
Let yk�n� and (yk�n� denote the outputs of the �lters hCM�ek �n� and (hCM�e
k �n�� respectively�
and consider
Yk�z� " jzN (Yk�z� !hHCM�e
k �z� " jzN (HCM�ek �z�
iX�z� !
p� H�zW k
�N � ej�ek X�z� �
or equivalently
yk�n� " j(yk�n"N � ! Z��fp� H�zW k
�N � ej�ek X�z�g
with k ! � �� ���� N � � where Z�� denotes the inverse z�transform operator� If the
input signal x�n� and the analysis prototype h�n� are real�valued� this implies
yk�n� ! RenZ�� np� H�zW k
�N � ej�ek X�z�
oo(yk�n "N � ! Im
nZ�� np� H�zW k
�N� ej�ek X�z�
oo
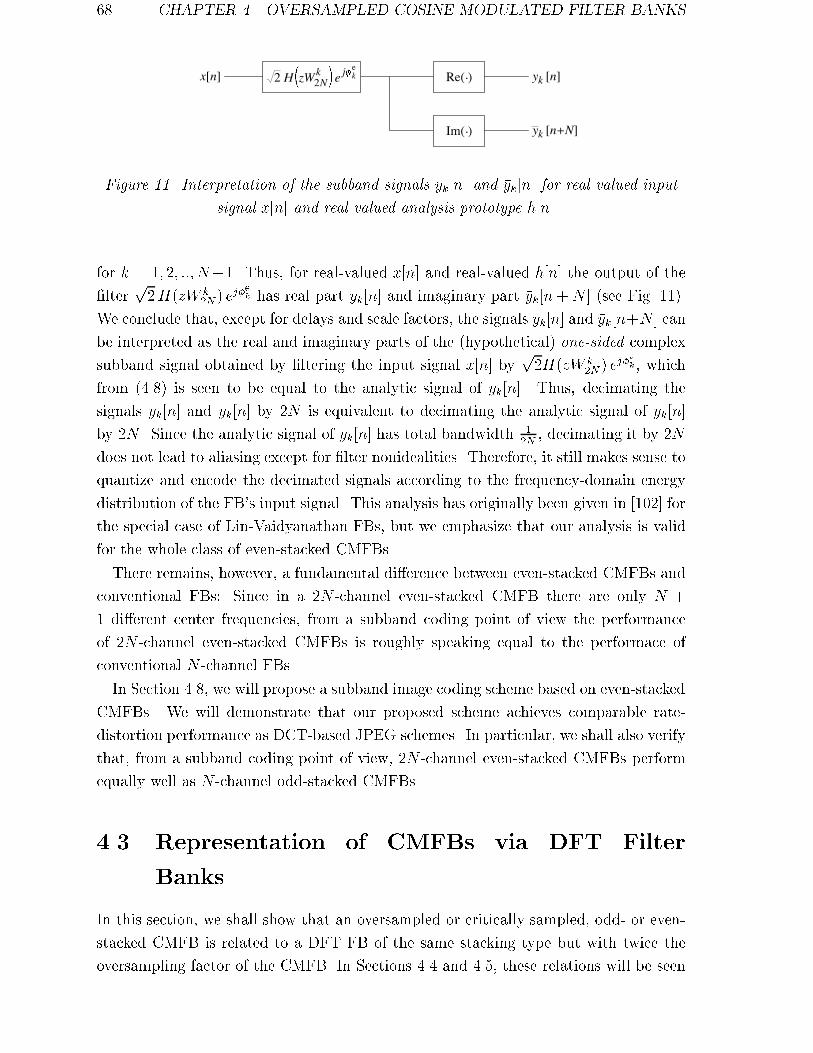
� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
Re(.)
Im(.)
x[n] yk [n]
yk [n+N]
2 H zW2Nk e j k
e
Figure ��� Interpretation of the subband signals yk�n� and (yk�n� for real�valued input
signal x�n� and real�valued analysis prototype h�n��
for k ! � �� ��� N�� Thus� for real�valued x�n� and real�valued h�n� the output of the
�lterp�H�zW k
�N � ej�ek has real part yk�n� and imaginary part (yk�n "N � �see Fig� ��
We conclude that� except for delays and scale factors� the signals yk�n� and (yk�n"N � can
be interpreted as the real and imaginary parts of the �hypothetical� one�sided complex
subband signal obtained by �ltering the input signal x�n� byp�H�zW k
�N � ej�ek � which
from ��� � is seen to be equal to the analytic signal of yk�n�� Thus� decimating the
signals yk�n� and (yk�n� by �N is equivalent to decimating the analytic signal of yk�n�
by �N � Since the analytic signal of yk�n� has total bandwidth��N
� decimating it by �N
does not lead to aliasing except for �lter nonidealities� Therefore� it still makes sense to
quantize and encode the decimated signals according to the frequency�domain energy
distribution of the FB�s input signal� This analysis has originally been given in ���� for
the special case of Lin�Vaidyanathan FBs� but we emphasize that our analysis is valid
for the whole class of even�stacked CMFBs�
There remains� however� a fundamental di�erence between even�stacked CMFBs and
conventional FBs� Since in a �N �channel even�stacked CMFB there are only N "
di�erent center frequencies� from a subband coding point of view the performance
of �N �channel even�stacked CMFBs is roughly speaking equal to the performace of
conventional N �channel FBs�
In Section �� � we will propose a subband image coding scheme based on even�stacked
CMFBs� We will demonstrate that our proposed scheme achieves comparable rate�
distortion performance as DCT�based JPEG schemes� In particular� we shall also verify
that� from a subband coding point of view� �N �channel even�stacked CMFBs perform
equally well as N �channel odd�stacked CMFBs�
��� Representation of CMFBs via DFT Filter
Banks
In this section� we shall show that an oversampled or critically sampled� odd� or even�
stacked CMFB is related to a DFT FB of the same stacking type but with twice the
oversampling factor of the CMFB� In Sections ��� and ���� these relations will be seen
���� REPRESENTATION OF CMFBS VIA DFT FILTER BANKS �
to yield a uni�ed and simpli�ed framework for the analysis and design of odd� and
even�stacked CMFBs�
����� Odd�Stacked CMFBs
Let us �rst consider an odd�stacked DFT FB with �N channels and decimation factor
M �see Subsection ����� The FB is critically sampled for �N !M and oversampled
for �N � M � The analysis and synthesis �lters are derived from prototypes h�n� and
f �n�� respectively� by modulation�
hDFT�ok �n� ! h�n�W� k����n�N and fDFT�ok �n� ! f �n�W
� k����n�N � k ! �� � ���� �N� �
where W�N ! e�j����N � The corresponding transfer functions are �see Fig� �a��
HDFT�ok �z� ! H
�zW
k����N
�and FDFT�o
k �z� ! F�zW
k����N
�� k ! �� � ���� �N� �
�����
Let us now consider an odd�stacked CMFB� Comparing ����� and ������ it follows
that the analysis �lters of an odd�stacked CMFB with N channels and decimation factor
M can be expressed in terms of the analysis �lters of an odd�stacked DFT FB with �N
channels and decimation factor M as
HCM�ok �z� !
p�
hHDFT�o
k �z� ej�ok "HDFT�o
�N�k���z� e�j�o
k
i� k ! �� � ���� N� �
The synthesis �lters� transfer functions can be similarly expressed as
FCM�ok �z� !
p�
hFDFT�ok �z� e�j�
ok " FDFT�o
�N�k���z� ej�oki� k ! �� � ���� N� �
The �lters HDFT�ok �z��FDFT�o
k �z� and HDFT�o�N�k���z��F
DFT�o�N�k���z� correspond to channel fre�
quencies � ! k����N
and � ! �k����N
� respectively� Thus� the CMFB analysis �lters are
obtained by combining the �lters of a DFT FB corresponding to positive and negative
frequencies� Note that the oversampling factor of the DFT FB� �N�M � is twice that of
the CMFB� N�M �
The relation between odd�stacked CMFBs and DFT FBs can also be characterized
in a di�erent manner that will be important subsequently� Let us compare the input�
output relation ����� in an odd�stacked CMFB with N channels and decimation factor
M to the input�output relation in an odd�stacked DFT FB with �N channels and
decimation factor M �again the oversampling factor of this DFT FB is twice that of
the CMFB�� According to ����� this latter input�output relation is
xDFT�o�n� !�N��Xk��
�Xm���
hx� hDFT�ok�m i fDFT�ok�m �n� � �����

�� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
with analysis functions hDFT�ok�m �n� ! hDFT�o�
k �mM � n� ! h��mM � n�W� k���� n�mM��N
and synthesis functions fDFT�ok�m �n� ! fDFT�ok �n � mM � ! f �n � mM �W� k���� n�mM��N �
It follows that the CMFB analysis and synthesis functions �see ����� and ������ can be
expressed in terms of the DFT FB analysis and synthesis functions� respectively� as
hCM�ok�m �n� !
p�
hhDFT�ok�m �n� e�j�
ok " hDFT�o�N�k���m�n� e
j�ok
i�����
fCM�ok�m �n� !
p�
hfDFT�ok�m �n� e�j�
ok " fDFT�o�N�k���m�n� e
j�ok
i� ��� �
Thus� the analysis and synthesis functions in a CMFB are obtained by combining pos�
itive and negative frequencies in the corresponding DFT FB�
����� Even�Stacked CMFBs
In an even�stacked DFT FB with �N channels and decimation factor M � the impulse
responses are �see Subsection �����
hDFT�ek �n� ! h�n�W�kn�N and fDFT�ek �n� ! f �n�W�kn
�N � k ! �� � ���� �N�
and the transfer functions are �see Fig� ��a��
HDFT�ek �z� ! H�zW k
�N � and FDFT�ek �z� ! F �zW k
�N � � k ! �� � ���� �N� �
����
Comparing ��� �� ���� and ����� it follows that the analysis �lters of an even�stacked
CMFB with �N channels and decimation factor �M can be expressed in terms of the
analysis �lters of an even�stacked DFT FB with �N channels and decimation factor M
as
HCM�ek �z� !
���������z�rM HDFT�e
� �z�� k ! ��p�
hHDFT�e
k �z� ej�ek "HDFT�e
�N�k �z� e�j�ek
i� k ! � �� ���� N�
z�sM HDFT�eN �z� ! z�sM HDFT�e
� ��z�� k ! N
(HCM�ek �z� !
jp�z�M
hHDFT�e
k �z� ej�ek �HDFT�e
�N�k �z� e�j�ek
i� k ! � �� ���� N� �
The synthesis �lters� transfer functions are similarly given by
FCM�ek �z� !
���������zrM FDFT�e
� �z�� k ! ��p�
hFDFT�ek �z� e�j�
ek " FDFT�e
�N�k �z� ej�ek
i� k ! � �� ���� N�
zsM FDFT�eN �z� ! zsM FDFT�e
� ��z�� k ! N
(FCM�ek �z� ! �
jp�zMhFDFT�ek �z� e�j�
ek � FDFT�e
�N�k �z� ej�eki� k ! � �� ���� N� �
The �lters HDFT�ek �z�� FDFT�e
k �z� and HDFT�e�N�k �z�� F
DFT�e�N�k �z� correspond to channel fre�
quencies � ! k�N
and � ! � k�N
� respectively� Again� the oversampling factor of the DFT
FB is twice that of the CMFB�

���� REPRESENTATION OF CMFBS VIA DFT FILTER BANKS �
The relation between even�stacked CMFBs and DFT FBs can also be characterized
using the analysis and synthesis functions� Let us compare the input�output relation
����� in an even�stacked CMFB with �N channels and decimation factor �M to the
input�output relation in an even�stacked DFT FB with �N channels and decimation
factor M � According to Subsection ����� this latter input�output relation reads
xDFT�e�n� !�N��Xk��
�Xm���
hx� hDFT�ek�m i fDFT�ek�m �n� ������
with the analysis functions hDFT�ek�m �n� ! hDFT�e�
k �mM � n� ! h��mM � n�W�k n�mM��N
and the synthesis functions fDFT�ek�m �n� ! fDFT�ek �n �mM � ! f �n�mM �W�k n�mM��N � It
follows �after simple manipulations� that the CMFB analysis and synthesis functions
�see ����� and ������ can be expressed in terms of the DFT FB analysis and synthesis
functions� respectively� according to
hCM�ek�m �n� !
�����������������������
�p�
hhDFT�ek��m �n� e�j�
ek " hDFT�e�N�k��m�n� e
j�ek
i� k ! � �� ���� N�
jp�
hhDFT�ek�N��m���n� e
�j�ek�N � hDFT�eN�k��m���n� e
j�ek�N
i�
k ! N " � N " �� ���� �N�
hDFT�e���m�r�n� � k ! �
hDFT�eN��m�s�n� � k ! N�
�����
and
fCM�ek�m �n� !
�����������������������
�p�
hfDFT�ek��m �n� e�j�
ek " fDFT�e�N�k��m�n� e
j�ek
i� k ! � �� ���� N�
jp�
hfDFT�ek�N��m���n� e
�j�ek�N � fDFT�eN�k��m���n� ej�ek�N
i�
k ! N " � N " �� ���� �N�
fDFT�e���m�r�n� � k ! �
fDFT�eN��m�s�n� � k ! N�
������
����� A Fundamental Decomposition
In the previous subsection� we showed that the analysis �synthesis� functions corre�
sponding to a CMFB can be expressed in terms of the analysis �synthesis� functions
corresponding to a DFT FB of the same stacking type but with twice the oversampling
factor� This implies the following important decomposition�
Theorem ��� The reconstructed signal of an odd� or even�stacked CMFB
can be decomposed as
x�n� !
�
h�S
h�f�DFTx��n� " �T
h�f�DFTx��n�
i� ������

�� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
where the operators S h�f�DFT and T
h�f�DFT are de�ned as
�S h�f�DFTx��n� !
�N��Xk��
�Xm���
hx� hDFTk�m i fDFTk�m �n� � ������
�T h�f�DFTx��n� !
�N��Xk��
�Xm���
ej��kcm hx� hDFTk�m i fDFTk�m �n� � ������
Here� hDFTk�m �n� ! hDFT�ok�m �n�� fDFTk�m �n� ! fDFT�ok�m �n�� fDFTk�m �n� ! fDFT�o�N�k���m�n��
k ! ok� and cm ! for an odd�stacked CMFB and hDFTk�m �n� ! hDFT�ek�m �n��
fDFTk�m �n� ! fDFT�ek�m �n�� fDFTk�m �n� ! fDFT�e�N�k�m�n�� k ! ek� and cm ! ���m for
an even�stacked CMFB�
Proof� Let us �rst consider the odd�stacked case� Inserting ����� and ��� � in �����
gives
xCM�o�n� !
�
N��Xk��
�Xm���
Dx� hDFT�ok�m e�j�
ok " hDFT�o�N�k���me
j�okE
hfDFT�ok�m �n� e�j�
ok " fDFT�o�N�k���m�n� e
j�ok
i!
�
N��Xk��
�Xm���
hhx� hDFT�ok�m i fDFT�ok�m �n� " hx� hDFT�o�N�k���mi fDFT�o�N�k���m�n�
" hx� hDFT�ok�m i fDFT�o�N�k���m�n� ej��o
k " hx� hDFT�o�N�k���mi fDFT�ok�m �n� e�j��ok
i!
�
�N��Xk��
�Xm���
hx� hDFT�ok�m i fDFT�ok�m �n� "�N��Xk��
�Xm���
ej��okhx� hDFT�ok�m i fDFT�o�N�k���m�n�
��
which is ������� Note that in the last step we have used e�j��o�N�k�� ! ej��
ok �
We next consider the even�stacked case� Inserting ����� and ������ in ������ we get
xCM�e�n� !
�
N��Xk��
�Xm���
hx� hDFT�ek��m e�j�ek " hDFT�e�N�k��me
j�eki
hfDFT�ek��m �n� e�j�
ek " fDFT�e�N�k��m�n� e
j�eki
"
�
�N��Xk�N�
�Xm���
hx� hDFT�ek�N��m��e�j�e
k�N � hDFT�eN�k��m��ej�e
k�N ihfDFT�ek�N��m���n� e
�j�ek�N � fDFT�eN�k��m���n� ej�ek�N
i"
�Xm���
hx� hDFT�e���m�ri fDFT�e���m�r�n� "�X
m���hx� hDFT�eN��m�si fDFT�eN��m�s�n�
!
�
N��Xk��
�Xm���
hx� hDFT�ek�m ifDFT�ek�m �n� " hx� hDFT�e�N�k�mi fDFT�e�N�k�m�n�
" ���mhx� hDFT�ek�m ifDFT�e�N�k�m�n� ej��ek " ���mhx� hDFT�e�N�k�mi fDFT�ek�m �n� e�j��
ek
i"
�Xm���
hhx� hDFT�e���m�ri fDFT�e���m�r�n� " hx� hDFT�eN��m�si fDFT�eN��m�s�n�
i�
���� REPRESENTATION OF CMFBS VIA DFT FILTER BANKS ��
Now using e�j��e�N�k ! ej��
ek � it follows that
xCM�e�n� !
�
�N��Xk��k ��N
�Xm���
hhx� hDFT�ek�m i fDFT�ek�m �n� " ���m ej��
ekhx� hDFT�ek�m i fDFT�e�N�k�m�n�
i
"�X
m���hx� hDFT�e���m�ri fDFT�e���m�r�n� "
�Xm���
hx� hDFT�eN��m�si fDFT�eN��m�s�n��
Finally� with ej��e� ! ���r� ej��eN ! ����r� and s ! r for even and s ! � r for
odd� we obtain
xCM�e�n� !
�
�N��Xk��
�Xm���
hx� hDFT�ek�m i fDFT�ek�m �n�
"
�
�N��Xk��
�Xm���
ej��ek���m hx� hDFT�ek�m i fDFT�e�N�k�m�n��
which is ������� �
We emphasize that the �rst component� �S h�f�DFTx��n�� is the output signal of a DFT
FB of the same stacking type with twice the oversampling factor �cf� ����� and ��������
The above decomposition will be the basis for our subsequent analysis of CMFBs� in
particular� for formulating PR and paraunitarity conditions in Sections ��� and ������
����� Relation with MDFT Filter Banks
Modi�ed DFT FBs �MDFT FBs�� proposed for critical sampling in ���� ��� ��� ����
were the �rst modulated FBs allowing for real processing and linear phase �lters in all
channels� We now demonstrate a close relation between MDFT FBs and even�stacked
CMFBs of the Wilson type� It can be shown that the reconstructed signal in a �possibly
oversampled� MDFT FB can be decomposed as
x�n� !
�
h�S
h�f�DFTx��n� " �T
h�f�DFTx
���n�i�
where �S h�f�DFTx��n� and �T
h�f�DFTx��n� are de�ned as in ������ and ������ for the even�
stacked case with parameters ! N and r ! � �the parameters of Wilson FBs�� In the
above input�output relation� T h�f�DFT acts on the conjugate of the input signal x�n�� For
real�valued x�n�� the input�output relation in an MDFT FB equals that in a Wilson FB�
For general �complex�valued� x�n�� it can be shown �similarly to the proof of Theorem
��� in Subsection ����� that an MDFT FB satis�es the PR property if and only if �
S h�f�DFT ! �I and T
h�f�DFT ! O� for T
h�f�DFT ! O� x�n� ! �
��S
h�f�DFTx��n�� This equals the
input�output relation of an even�stacked DFT FB �up to the factor of ��� and� as
will be explained in Subsection ����� also the input�output relation in a PR Wilson
�Here� I and O denote the identity and zero operator� respectively� on l��ZZ��

�� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
FB� Thus� MDFT FBs with PR are equivalent to PR Wilson FBs� Furthermore� it
follows from the above decomposition that the PR and paraunitarity conditions to be
formulated in Subsections ��� and ����� apply to MDFT FBs as well�
����� Representations of the CMFB Operators
The �CMFB operators� S h�f�DFT and T
h�f�DFT from Subsection ����� are fundamental for
the analysis and design of CMFBs with PR �see Section ����� We shall now provide
representations of the operator T h�f�DFT in the time� frequency� and polyphase domains�
The corresponding representations of the operator S h�f�DFT are obtained from the repre�
sentations provided in Section ��� by replacing N by �N � These representations will
then be used in Sections ��� and ����� for formulating PR and paraunitarity conditions�
respectively�
Time domain� In the time domain� the operator T h�f�DFT can be expressed as
�T h�f�DFTx��n� ! ���r �N
�Xl���
�Xm���
dl am x��n " �mM� �lN� �
�f �n�mM � h�n�mM " " �lN � ������
with dl ! ���l and am ! in the odd�stacked case and dl ! and am ! ���m in the
even�stacked case�
Frequency domain� The frequency �z�transform� version �T h�f�
DFT ! ZT h�f�DFTZ
��
�here Z is the z�transform operator� can be expressed as
�T h�f�
DFTX��z� !
���rM
M��Xl��
X�zW lM �
�N��Xk��
FDFTk �z�HDFT
k �zW lM �W
k���N � ������
with FDFTk �z� ! FDFT�o
k �z�� HDFTk �z� ! HDFT�o
k �z�� � ! �� FDFTk �z� ! FDFT�o
�N�k���z�� and
� ! ��in the odd�stacked case and FDFT
k �z� ! FDFT�ek �z�� HDFT
k �z� ! HDFT�ek �z�� � ! �
��
FDFTk �z� ! FDFT�e
�N�k �z�� and � ! � in the even�stacked case�
Polyphase domain� It can be shown that the polyphase components T h�f�n �z� !P�
m��� �T h�f�DFTx��n"mM � z�m of �T
h�f�DFTx��n� are related to the polyphase components
Xn�z� !P�
m��� x�n "mM � z�m of x�n� as
T h�f�n �z� ! ���r M
Q
Q��Xl��
dlX�n����lN ���z�P��Xi��
hRn�zW
�iv�P �E�n����lN���zW iv
�P �
" Rn��zW�iv�P �E�n����lN��zW
iv�P �
i� ���� �
where En�z� !P�
m��� h�mM � n� z�m and Rn�z� !P�
m��� f �mM " n� z�m are the
polyphase components of the prototypes h�n� and f �n�� respectively� NM
! PQwith P and

���� PERFECT RECONSTRUCTION CONDITIONS ��
Q relatively prime� and �nally dl ! ���l� v ! Q��� and � ! � in the odd�stacked
case and dl ! � v ! �� and � ! in the even�stacked case�
Dual polyphase domain� The dual polyphase components T h�f��n �z� !P�
m��� �T h�f�DFTx��n " m�N � z�m of �T
h�f�DFTx��n� are related to X �
n�z� !P�
m��� x�n "
m�N � z�m as
T h�f��n �z� ! ���r �N
Q
Q��Xl��
�P��Xi��
aiX��n���iM�zW l
Q�R�n�iM��z�E �
�n��iM ��zW lQ�
! ���r �NQ
Q��Xl��
P��Xi��
aiX��n���iM�zW l
Q�hR�n�iM��z�E �
�n��iM��zW lQ�
" aP zQR�n�iM�NQ��z�E
��n��iMNQ��zW
lQ�i� �����
where � ! � and ai ! in the odd�stacked case and � ! and ai ! ���i in the
even�stacked case�
The above time� frequency� and polyphase domain representations �specialized to
the even�stacked case with !N and r!�� can also be used for MDFT FBs if x�n� is
replaced by x��n� in the various representations of T h�f�DFT �we recall from Subsection �����
that in an MDFT FB T h�f�DFT acts on x��n���
��� Perfect Reconstruction Conditions
In this section� we will formulate PR conditions for odd� and even�stacked� oversam�
pled and critically sampled CMFBs� These PR conditions are formulated in the time�
frequency� and polyphase domains� they will constitute a basis for the design methods
to be discussed in Section ���� For the special case of critical sampling �N ! M�� our
conditions simplify to those derived in ��� � � ��� �� �� �� ����
����� PR Conditions Using the CMFB Operators
Inserting the PR relation x�n� ! x�n� in the CMFB input�output relation ����� or �����
yields
x�n� !N ���Xk��
�Xm���
hx� hCMk�mi fCMk�m �n�� ������
where N � ! N � hCMk�m�n� ! hCM�ok�m �n�� and fCMk�m �n� ! fCM�o
k�m �n� for an odd�stacked CMFB
and N � ! �N � hCMk�m�n� ! hCM�ek�m �n�� and fCMk�m �n� ! fCM�e
k�m �n� for an even�stacked CMFB�
We shall next derive a fundamental PR condition in terms of the operators S h�f�DFT and
T h�f�DFT � This PR condition follows from the decomposition in Theorem ���

�� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
Theorem ��� A CMFB �even�stacked or odd�stacked� oversampled or
critically sampled� satis�es the PR property x�n� ! x�n� if and only if
S h�f�DFT ! �I and T
h�f�DFT ! O� �����
Proof� Inserting ����� into the decomposition ������ immediately gives x�n� ! x�n�� so
that ����� is su�cient for PR� We now show that ����� is also necessary for PR� From
������� there is x�n� ! ��
h�S
h�f�DFTx��n�" �T
h�f�DFTx��n�
i� According to ������� �T
h�f�DFTx��n� is
a linear combination of time�reversed and shifted signal versions x��n"�mM��lN���whereas according to ���� �S
h�f�DFTx��n� is a linear combination of shifted �but not time�
reversed� signal versions x�n � �lN �� For x�n� ! x�n�� it is clear that all time�reversed
signal versions x��n"�mM � �lN �� �due to T h�f�DFT� must be weighted by zero since
they cannot be canceled by the signal versions x�n � �lN � �due to S h�f�DFT� unless the
signal x�n� has special symmetry properties� Hence� there must be T h�f�DFT ! O� which
entails x�n� ! ���S
h�f�DFTx��n�� This �nally implies S
h�f�DFT ! �I� �
If the second PR condition� T h�f�DFT ! O� is satis�ed� the CMFB�s input�output relation
������ reduces to
x�n� !
��S
h�f�DFTx��n��
which is �up to a constant factor� the input�output relation of a DFT FB with �N
channels and decimation factor M � This DFT FB is odd�stacked �even�stacked� for an
odd�stacked �even�stacked� CMFB� Thus� we conclude that CMFBs with PR correspond
to PR DFT FBs of the same stacking type and with twice the oversampling factor� In
view of this correspondence� it is not surprising that the �rst PR condition� S h�f�DFT ! �I�
is �up to a constant factor� the PR condition for a DFT FB with �N channels and
decimation factor M �cf� Section ����� this PR condition is the same for odd�stacked
and even�stacked CMFBs� In the special case of critical sampling� a similar relation has
previously been shown to exist between MDFT FBs and DFT FBs �����
Using the time� frequency� and polyphase domain representations of the CMFB oper�
ators S h�f�DFT and T
h�f�DFT �see Subsection ������� we next reformulate the two PR conditions
����� in the various domains�
����� PR Conditions in the Time Domain
ReplacingN by �N in ������ it immediately follows that the �rst PR condition� S h�f�DFT !
�I� is satis�ed if and only if
N�X
m���f �n�mM � h��n "mM " �lN � ! ��l� � ������

���� PERFECT RECONSTRUCTION CONDITIONS ��
With ������ it follows after some manipulations that the second PR condition� T h�f�DFT !
O� holds if and only if
�Xi���
bi f �n� iPM � h�n " iPM " " �lN � ! � � l ! �� � ���� Q��
where NM
! PQwith P � Q relatively prime and bi ! ���iQ in the odd�stacked case and
bi ! ���iP in the even�stacked case� In the special case of integer oversampling� i�e��
Q ! or N ! PM with P � IN� the latter condition simpli�es to
�Xi���
bi f �n� iPM � h�n" iPM " � ! � � ������
where bi ! ���i in the odd�stacked case and bi ! ���iP in the even�stacked case�
Note that critical sampling� N ! M � is a special case with P ! � It can be seen that if
prototypes h�n�� f �n� satisfy the �rst PR property ������ in the critical case� the scaled
prototypespPh�n��
pPf �n� will satisfy this property in the case of integer oversampling
with oversampling factor P �this has also been observed for the paraunitary case in
����� However� we caution that a similar rule does not hold for the second PR condition
������� Thus� prototypes providing PR in the critical case do not automatically provide
PR for integer oversampling�
����� PR Conditions in the Frequency Domain
Replacing N by �N in ����� it follows that S h�f�DFT ! �I for either stacking type if and
only if�N��Xk��
F �zW k�N �H�zW k
�NWlM� ! �M ��l� � l ! �� � ����M��
Similarly� it follows from ������ that T h�f�DFT ! O if and only if
�N��Xk��
FDFTk �z�HDFT
k �zW lM �W k�
�N ! � � l ! �� � ����M��
where FDFTk �z� ! FDFT�o
�N�k���z�� HDFTk �z� ! HDFT�o
k �z�� and � ! � in the odd�stacked
case and FDFTk �z� ! FDFT�e
�N�k �z�� HDFTk �z� ! HDFT�e
k �z�� and � ! ��in the even�stacked
case�
����� PR Conditions in the Polyphase Domain
From ������� it follows that S h�f�DFT ! �I if and only if
Rn�z�En�z� ! � IQ � n ! �� � ����M�� ������

� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
Alternatively� for Q odd we have S h�f�DFT ! �I if and only if
Al�n�z��!
P��Xi��
hRn�zW
i�P �En��lN�zW i
�P � "Rn��zW i�P �En��lN��zW i
�P �i!
�Q
M��l�
������
for l ! �� � ���� Q�� n ! �� � ����M�� For Q even� S h�f�DFT ! �I if and only if
dl Al�n�z� " z�P dlQ��AlQ���n�z� !�Q
M��l� � l ! �� � ����
Q
�� � n ! �� � ����M��
where dl ! ���l in the odd�stacked case and dl ! in the even�stacked case�
Similarly� for Q odd it follows with ���� � that T h�f�DFT ! O if and only if
Bl�n�z��!
P��Xi��
�Rn�zW�i�P �E�n����lN��� zW i
�P � ������
" Rn��zW�i�P �E�n����lN�� zW
i�P �� ! � ������
for l ! �� � ���� Q� � n ! �� � ����M � � where again � ! � in the odd�stacked case
and � ! in the even�stacked case� For Q even� T h�f�DFT ! O if and only if
dlBl�n�z� " ���az�P dlQ��BlQ���n�z� ! � � l ! �� � ����Q
��� n ! �� � ����M�
with a ! � in the odd�stacked case and a ! in the even�stacked case� For integer
oversampling �Q ! �� ������ and ������ simplify respectively to
A��n�z� !P��Xi��
�Rn�zWi�P �En�zW
i�P � "Rn��zW i
�P �En��zW i�P �� !
�
M
and
B��n�z� !P��Xi��
hRn�zW
�i�P �E�n����� zW i
�P � " Rn��zW�i�P �E�n���� zW
i�P �i! � �
for n ! �� � ����M � �
����� PR Conditions in the Dual Polyphase Domain
Finally� it follows from ������ that S h�f�DFT ! �I if and only if
�P��Xi��
R�n�iM�z�E �n�iM�zW l
Q� !Q
N��l� � n ! �� � ���� �N��
and ����� implies that T h�f�DFT ! O if and only if
R�n�iM�z�E ��n��iM �zW l
Q� " aP zQR�n�iM�NQ�z�E
��n��iMNQ�zW
lQ� ! �

���� FRAMETHEORETIC ANALYSIS �
for l ! �� � ���� Q� � i ! �� � ���� P � � n ! �� � ���� �N�� where aP ! in the odd�
stacked case and aP ! ���P in the even�stacked case� For integer oversampling� these
conditions simplify respectively to
�P��Xi��
R�n�iM�z�E �n�iM �z� !
N� n ! �� � ���� �N� ���� �
R�n�iM�z�E ��n��iM�z� " aP z R
�n�iM�N�z�E
��n��iMN�z� ! � �
with i ! �� � ���� P � � n ! �� � ���� �N � �
��� FrameTheoretic Analysis
In this section� we will apply frame theory to oversampled CMFBs� The frame operator
of a CMFB is given by
�SCMx��n� !N ���Xk��
�Xm���
hx� hCMk�mi hCMk�m�n� �����
with N � ! N and hCMk�m�n� ! hCM�ok�m �n� for an odd�stacked CMFB and N � ! �N and
hCMk�m�n� ! hCM�ek�m �n� for an even�stacked CMFB� Our frame�theoretic analysis of CMFBs
will be based on the following fundamental decomposition of the CMFB frame operator�
Theorem ��� The frame operator of an odd� or even�stacked CMFB can
be decomposed as
SCM !
��SDFT " TDFT� � ������
Here� SDFT is the frame operator of �respectively� an odd� or even�stacked
DFT FB with �N channels and decimation factor M �
�SDFTx��n� !�N��Xk��
�Xm���
hx� hDFTk�m ihDFTk�m �n� �
and TDFT is given by
�TDFTx��n� !�N��Xk��
�Xm���
ej��kcm hx� hDFTk�m i hDFTk�m �n� �
with hDFTk�m �n�� k� and cm as de�ned in Theorem �� and hDFTk�m �n� !
hDFT�o�N�k���m�n� in the odd�stacked case and hDFTk�m �n� ! hDFT�e�N�k�m�n� in the even�
stacked case�
The proof of this theorem is similar to that of Theorem �� and will be omitted� We
note that this important decomposition has �rst been given for orthogonal continuous�
time Wilson expansions in ���� It has been extended to oversampled Wilson frames in
���� ����

� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
We emphasize that SDFT is the frame operator of a DFT FB with the same stacking
type and twice the oversampling factor of the CMFB� Furthermore� the operators SDFT
and TDFT are obtained from the CMFB operators S h�f�DFT in ������ and T
h�f�DFT in �������
respectively� by replacing f �n� with hy�n� ! h���n��
SDFT ! S h�hy�DFT and T DFT ! T
h�hy�DFT with hy�n� ! h���n� �
This means that time� frequency� and polyphase domain representations of SDFT and
TDFT can immediately be obtained from the corresponding representations of S h�f�DFT
and T h�f�DFT presented in Subsection ����� by replacing f �n�� F �z�� Rn�z�� and R
�n�z� with
h���n�� #H�z�� #En�z�� and #E �n�z�� respectively�
����� Relations between CMFBs and DFT FBs
Based on the above decomposition we shall now show that� under a speci�c condition�
the minimum norm synthesis prototype in an odd� or even�stacked CMFB is equal �up to
a constant factor� to the minimum norm synthesis prototype in the corresponding even�
stacked DFT FB� The minimum norm synthesis FB is of great practical interest since it
minimizes the reconstruction error variance resulting from additive white uncorrelated
noise in the FB�s subbands �Chapter �� �� �� We shall furthermore show that under a
speci�c condition the CMFB inherits important numerical properties of the DFT FB�
and that a CMFB is paraunitary if the underlying DFT FB is paraunitary�
Theorem �� Let h�n� and f �n� denote the analysis and synthesis proto�
type� respectively� in an odd�stacked CMFB withN channels and decimation
factor M � or in an even�stacked CMFB with �N channels and decimation
factor �M � Let h�n� be such that fhDFT�ok�m �n�g �for an odd�stacked CMFB�
or fhDFT�ek�m �n�g �for an even�stacked CMFB� is a frame in l��ZZ�� i�e��
ADFTkxk� � hSDFT x� xi � BDFTkxk� � x�n� � l��ZZ� � �����
Furthermore� let h�n� be such that TDFT ! O� Then� the following holds�
�i� the CMFB analysis functions fhCMk�m�n�g constructed from h�n� are a frame
in l��ZZ� with frame bounds ACM ! ADFT�� and BCM ! BDFT��� i�e��
ADFT
�kxk� � hSCM x� xi � BDFT
�kxk� � x�n� � l��ZZ� � ������
�ii� for f �n� ! � �S��DFT�ehy��n� with hy�n� ! h���n�� the synthesis CMFB
ffCMk �n�g constructed from f �n� is the PR synthesis CMFB with minimum
norm �lters�

���� FRAMETHEORETIC ANALYSIS
Proof� Statement �i� follows easily from Theorem ���� for TDFT ! O� ������ implies
that the CMFB frame operator reduces to SCM ! ��SDFT� Thus� using SDFT ! �SCM
in ����� we obtain �������
Statement �ii� will be proved for the odd�stacked case� the proof for the even�
stacked case is similar� For TDFT�o ! O� we have SCM�o ! ��SDFT�o and thus
S��CM�o ! �S��DFT�o� With ����� the minimum norm PR synthesis �lters are given
by fCM�ok�m �n� !
�S��CM�oh
CM�ok�m
��n� ! �
�S��DFT�oh
CM�ok�m
��n�� With ����� it follows that the
minimum norm PR synthesis �lters are obtained from the analysis �lters as
fCM�ok �n� ! �
�S��DFT�oh
CM�ok��
��n� ! �S��DFT�o
�p� hy�n� cos
���k " ����
Nn" ok
��
!p�hS��DFT�o
nhy�n�W� k����n
�N
oe�j �
ok " S��DFT�o
nhy�n�W k����n
�N
oej �
ok
i�
Now with S��DFT�ofhy�n�W� k����n�N g ! W
� k����n�N �S��DFT�eh
y��n�� this becomes further
fCM�ok �n� !
p�h�S��DFT�eh
y��n�W� k����n�N e�j �
ok " �S��DFT�eh
y��n�W k����n�N ej �
ok
i
!p� � �S��DFT�eh
y��n� cos
��k " ����
Nn� ok
��
Comparing with ����� we see that f �n� ! � �S��DFT�ehy��n�� which completes the proof�
�
The following interpretations and conclusions are valid for TDFT ! O�
� Eq� ������ implies SCM ! ��SDFT� which means that the CMFB frame operator
reduces to the frame operator of the corresponding DFT FB� Thus� for TDFT ! O
the design of a CMFB reduces to that of a DFT FB of the same stacking type and
with twice the oversampling factor� Since according to ������ �S��DFT�ehy��n� is the
minimum�norm synthesis prototype of the corresponding DFT FB �even�stacked
or odd�stacked� ����� the minimum norm PR synthesis prototype in the CMFB�
f �n� ! � �S��DFT�ehy��n�� is equal �up to a constant factor� to the minimum norm
PR synthesis prototype in the corresponding DFT FB�
� The CMFB frame bounds ACM ! ADFT�� and BCM ! BDFT�� are trivially re�
lated to the frame bounds ADFT and BDFT of the corresponding DFT FB� Since
BCM�ACM ! BDFT�ADFT� the CMFB inherits important numerical properties
�noise immunity� of the corresponding DFT FB �see Chapter �� even though it
has just half the oversampling factor of the DFT FB� This is remarkable� since
usually a decrease of redundancy leads to a deterioration of the numerical prop�
erties of a frame�
� In particular� if the DFT FB is paraunitary �which means ADFT ! BDFT or� equiv�
alently� SDFT ! ADFTI ���� ��� ����� then the corresponding CMFB is paraunitary
as well �ACM ! BCM� SCM !ADFT
�I��

� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
All these results hinge on the condition TDFT ! O� As noted further above� TDFT !
O is equivalent to the second PR property in Theorem ���� T h�f�DFT ! O� with f �n�
replaced by h���n�� This means� in particular� that all conditions for T h�f�DFT ! O
formulated in Subsection �����'����� in the time� frequency� and polyphase domains can
immediately be reformulated as conditions for TDFT ! O� For integer oversampling� a
simple su�cient condition for TDFT ! O is stated in the following theorem�
Theorem ��� For odd�stacked CMFBs with arbitrary integer oversampling
factor P � and for even�stacked CMFBs with odd P � the symmetry property
h�� " ��l " �PM � n� ! h�n� �with some l � ZZ� ������
is su�cient for TDFT ! O�
Proof� Using ������ with f �n� ! h���n� shows that TDFT ! O if and only if
�Xi���
bi h���n " iPM � h�n " iPM " � ! � �
where bi ! ���i for odd�stacked CMFBs and bi ! ���iP for even�stacked CMFBs�
Now� for odd�stacked CMFBs with arbitrary integer P and for even�stacked CMFBs
with odd P � we have bi ! ���i and thus we have to show that
A�n��!
�Xi���
���i h���n " iPM � h�n " iPM " � ! �� ������
Inserting ������� h�n� ! h��"��l"�PM�n�� and subsequently substituting �l"�i !j� we obtain
A�n� !�X
i������i h�n" ��l " � i�PM " � h���n " ��l " � i�PM �
! ��X
j������j h���n " jPM � h�n" jPM " � �
which when compared to ������ is seen to be �A�n�� Thus A�n� ! �A�n�� which implies
A�n� ! �� �
It can be shown that if h�n� is the prototype of a critically sampled� paraunitary
CMFB with parameter and� more speci�cally� h�n� satis�es the symmetry property
������ with a certain l� then the scaled prototypepPh�n� induces a paraunitary CMFB
also in the case of integer oversampling �with oversampling factor P as restricted in
Theorem ����� provided that in the oversampled case is replaced by � ! � ��l "
��P � �M �
Condition ������ implies that h�n� has linear phase� Thus� in the case of integer
oversampling� PR �with linear phase �lters in the case of an even�stacked CMFB� is

���� FRAMETHEORETIC ANALYSIS �
achieved by choosing h�n� according to ������ and using f �n� ! � �S��DFT�ehy��n�� In
particular� the CMFB will then be paraunitary if SDFT ! �I �cf� ��������
In certain special cases� the expressions for SDFT and the calculation of the minimum�
norm synthesis prototype using S��DFT�e simplify considerably� This will be discussed in
Subsections ������������
����� Paraunitarity Conditions
It is easily seen that a CMFB �odd�stacked or even�stacked� oversampled or critically
sampled� is paraunitary if and only if it satis�es PR and f �n� ! h���n�� This implies
that the two PR conditions of Theorem ���� with f �n� replaced by h���n�� are necessaryand su�cient for paraunitarity� Thus� an odd� or even�stacked CMFB is paraunitary if
and only if
S h�hy�DFT ! SDFT ! �I and T
h�hy�DFT ! TDFT ! O with hy�n� ! h���n� �
������
Furthermore� all PR conditions formulated in Subsections �����'����� become parauni�
tarity conditions if f �n�� F �z�� Rn�z�� and R�n�z� are replaced by h���n�� #H�z�� #En�z��
and #E �n�z�� respectively�
We recall that a su�cient condition on h�n� for the second paraunitarity condition�
T h��h�DFT ! O� was provided in Theorem ����
����� Time�Limited Prototype
If h�n� has �nite length � �N �recall that the corresponding DFT FB has �N channels��
the frame operator SDFT is a multiplication operator in the time domain �see Subsection
������� i�e�
�SDFTx��n� ! � bh�n� x�n� � �S��DFTx��n� !x�n�
� bh�n��
with bh�n� as de�ned in Subsection ������
bh�n� ! N�X
m���jh��n "mM �j��
For TDFT ! �� the frame bounds are given �independently of the stacking type� by
ACM ! minn������M�� bh�n� and BCM ! maxn������M�� bh�n�� for bh�n� � the CMFB is
paraunitary with frame bound ACM ! �

� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
����� Band�Limited Prototype
If h�n� is band�limited in a frequency interval of length � �M � SDFT is a multiplication
operator in the frequency domain �see Subsection ������� i�e��
� �SDFTX��ej���� ! �Gh���X�ej���� � � �S��DFTX��ej���� !
X�ej����
�Gh���
with Gh��� de�ned as
Gh����!
�M
�N��Xk��
���H�ej�� �� k�N����
����� � ������
where �� ! � in the even�stacked case and �� !��N
in the odd�stacked case� For TDFT !
O� the frame bounds are given by ACM ! inf������� Gh��� and BCM ! sup������� Gh����
they are independent of the stacking type since for the two stacking types Gh��� di�ers
merely by a frequency shift� For TDFT ! O and Gh��� � � the CMFB is paraunitary
with ACM ! �
����� Integer Oversampling
In the case of integer oversampling� N ! PM � SDFT is a multiplication operator in
the polyphase domain �see Subsec� ������ i�e�� the polyphase components Yn�z� !P�m��� �SDFTx��n"mM � z�m are given by
Yn�z� ! �Gn�z�Xn�z�
with
Gn�z� !M
�
P��Xi��
h#En�zW
iv�P �En�zW
iv�P � " #En��zW iv
�P �En��zW iv�P �
i� ������
where v ! �� in the odd�stacked case and v ! � in the even�stacked case� For TDFT !
O� the frame bounds of the CMFB are given by ACM ! inf�������� n��������M�� Gn�ej���� and
BCM ! sup�������� n��������M�� Gn�ej����� they are independent of the stacking type� The
CMFB is paraunitary with ACM ! if TDFT ! O and Gn�z� � �n ! �� � ����M���
this condition turns out to be the same for both stacking types�
Furthermore� it follows from ���� � that in the polyphase domain TDFT is essentially
a multiplication operator� i�e�� the polyphase components Tn�z� !P�
m��� �T DFTx��n"
mM � z�m are given by
Tn�z� ! �Dn�z�X�n�����z�where
Dn�z� ! ���r M�
P��Xi��
h#En�zW
�iv�P �E�n�����zW iv
�P �
" #En��zW�iv�P �E�n����zW iv
�P �i�
with v ! �� and � ! � in the odd�stacked case and v ! � and � ! in the
even�stacked case�

���� FRAMETHEORETIC ANALYSIS �
����� Construction of Paraunitary Prototypes
In this subsection we shall describe a method for the construction of paraunitary CMFBs
from nonparaunitary CMFBs� This method is based on the approach described in
Theorem ���
Theorem �� Let h�n� be the analysis prototype of a �non�paraunitary�
even�stacked or odd�stacked CMFB providing a frame expansion with
TDFT ! O� Then the CMFB with analysis prototype
h p��n� !p� �S
����DFT�eh
y����n�and synthesis prototype f �n� ! h p�
�
��n� ! p��S
����DFT�eh
y��n� is paraunitary
with frame bound ACM ! �
Proof� From Corollary A� � we know that applying S����CM to each of the frame func�
tions hCMk�m �n� yields a tight frame with A ! � We shall �rst provide the proof for the
odd�stacked case and then outline the di�erences to the even�stacked case� Let us de�ne
the time�frequency shift operatorW ok�m as �W o
k�mx��n� ! x�n�mM �W� k���� n�mM��N �
With SCM�o ! ��SDFT�o and ������ we then get hCM�o
pk�m�n� !
p��S
����DFT�oh
CM�ok�m ��n� !
�S����DFT�oW
ok�mh
y��n�e�j�ok " �S
����DFT�oW
o�N�k���mh
y��n�ej�ok � Now� using S
����DFT�oW
ok�m !
Wok�mS
����DFT�e we get hCM�o
pk�m�n� ! ��S
����DFT�eh
y��n �mM � cos� k�����
N�mM � n� " ok
�and
hence hyp�n� !p��S
����DFT�eh
y��n�� which completes the proof for the odd�stacked case�
In the even�stacked case� the proof is similar using S����DFT�eW
ek�m ! W
ek�mS
����DFT�e where
�W ek�mx��n� ! x�n�mM �W
�k n�mM��N � �
The above construction of hp�n� simpli�es in the special situations considered in
Subsections �����'������ If h�n� has length � �N and satis�es TDFT ! O� then
h p��n� !p� �S
����DFT�eh
y����n� ! h�n�qbh��n�
with bh�n� de�ned in Subsection ������ If h�n� is band�limited with bandwidth � �M �
then the Fourier transform of h p��n� is given by
H p��ej���� !p� � �S
����DFTH���� !
H�ej����qGh���
with Gh��� de�ned in Subsection ������ Finally� for integer oversampling the polyphase
components of h p��n�� E p�n �z� !
P�m��� h p��mM � n� z�m� are obtained from the
polyphase components En�z� of h�n� as
E p�n �z� !
En�z�
Pn�z��
where Pn�z� is a �positive square root� of Gn�z� �see ������� in the sense that
Pn�z� #Pn�z� ! Gn�z� with Pn�ej���� � � and #Pn�z� ! Pn�z� �see Subsection �������

� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
��� Design Methods
In this section� we shall discuss three design methods for paraunitary� odd� or even�
stacked CMFBs with oversampling� For a paraunitary CMFB� there is f �n� ! h���n�and hence the CMFB design reduces to the design of the analysis prototype h�n�� We
here assume h�n� to be real�valued�
����� Design via Constrained Optimization
Our �rst design method minimizes
Ch�!Z ���
�jH�ej����j�W �ej���� d�� ���� �
where W �ej���� is a nonnegative weighting function� subject to the paraunitarity side
constraints TDFT ! O and SDFT ! �I which are quadratic in h�n��
For the sake of simplicity� let us assume integer oversampling with arbitrary �integer�
oversampling factor P in the odd�stacked case and odd P in the even�stacked case�
Then� the symmetry property ������ is su�cient for T DFT ! O� and it remains to
satisfy SDFT ! �I� �With arbitrary oversampling� T DFT ! O would have to be included
as a further side constraint�� Assuming a real�valued FIR prototype h�n� of length
L ! " ��l " �PM " with some l �ZZ� the assumed symmetry of h�n� implies that
onlyK samples of h�n� have to be determined� where K ! L�for L even and K ! L�
�for
L odd� Collecting these samples in the vector h� the cost function ���� � can be written
as the quadratic form Ch ! hT Ph ��� �with superscript T denoting transposition�� Here
P is a K � K matrix whose elements depend on the weighting function W �ej���� ����
Hence� our optimization problem reduces to the minimization of Ch ! hTPh under the
side constraint SDFT ! �I�
Substituting f �n� ! h���n� ! h��n� in the time�domain PR condition ������� the
paraunitarity side constraint SDFT ! �I is formulated as
�Xm���
h�n"mM � h�n " �m" �lP �M � !
PM��l� for n � ZZ� �����
For an FIR prototype h�n�� this amounts to a �nite number of scalar equations since
h�n "mM � and h�n " �m " �lP �M � will overlap only for a �nite number of di�erent l
values� We note that the side constraint SDFT ! �I can equivalently be formulated in
the frequency� polyphase� and dual polyphase domains �cf� Subsections �����'�������
Fig� � presents a design example that has been obtained using the constrained
optimization discussed above� with W �ej���� ! for � � ����� ��� and W �ej���� ! �
else� The length of the prototype is L ! �� Fig� ��a� shows an odd�stacked CMFB
with N ! ��� M ! � while Figs� ��b���c� show the �lters Hk�z� �k ! �� � ���� N�
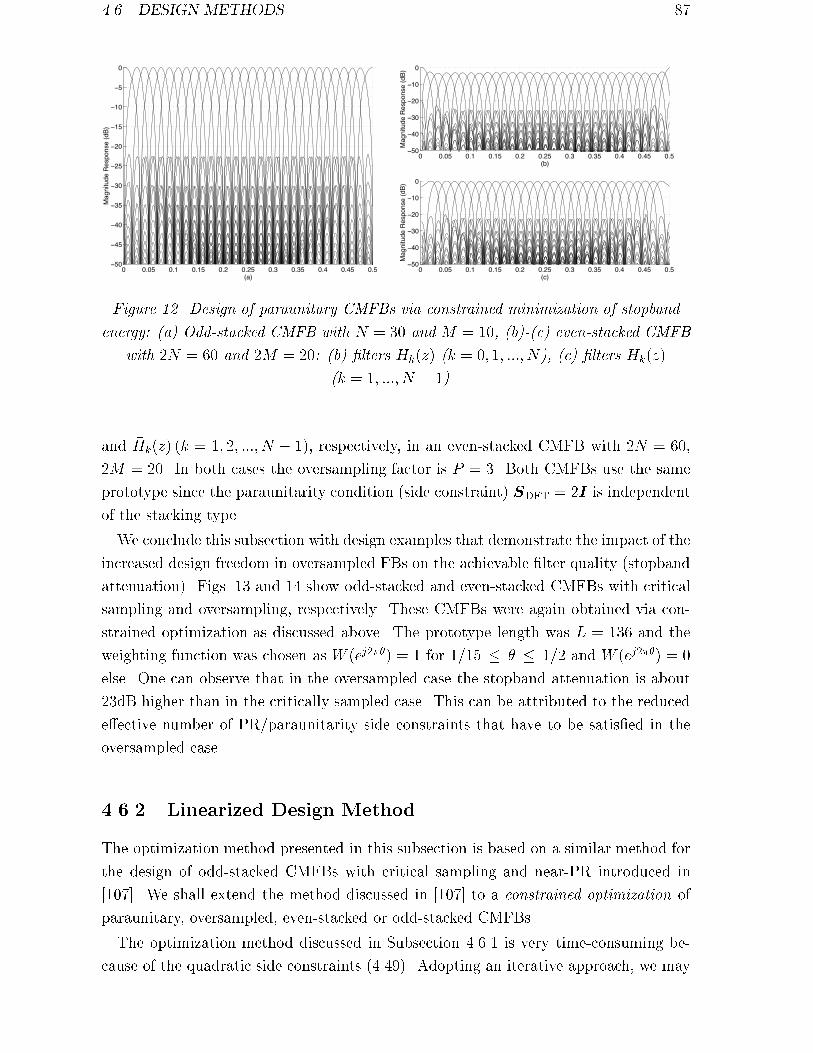
���� DESIGN METHODS �
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−50
−45
−40
−35
−30
−25
−20
−15
−10
−5
0
Mag
nitu
de R
espo
nse
(dB
)
(a)0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
−50
−40
−30
−20
−10
0
(c)
Mag
nitu
de R
espo
nse
(dB
)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−50
−40
−30
−20
−10
0
Mag
nitu
de R
espo
nse
(dB
)
(b)
Figure ��� Design of paraunitary CMFBs via constrained minimization of stopband
energy� a Odd�stacked CMFB with N ! �� and M ! �� b�c even�stacked CMFB
with �N ! �� and �M ! ��� b �lters Hk�z� k ! �� � ���� N� c �lters (Hk�z�
k ! � ���� N � �
and (Hk�z� �k ! � �� ���� N � �� respectively� in an even�stacked CMFB with �N ! ���
�M ! ��� In both cases the oversampling factor is P ! �� Both CMFBs use the same
prototype since the paraunitarity condition �side constraint� SDFT ! �I is independent
of the stacking type�
We conclude this subsection with design examples that demonstrate the impact of the
increased design freedom in oversampled FBs on the achievable �lter quality �stopband
attenuation�� Figs� � and � show odd�stacked and even�stacked CMFBs with critical
sampling and oversampling� respectively� These CMFBs were again obtained via con�
strained optimization as discussed above� The prototype length was L ! �� and the
weighting function was chosen as W �ej���� ! for �� � � � �� and W �ej���� ! �
else� One can observe that in the oversampled case the stopband attenuation is about
��dB higher than in the critically sampled case� This can be attributed to the reduced
e�ective number of PR�paraunitarity side constraints that have to be satis�ed in the
oversampled case�
����� Linearized Design Method
The optimization method presented in this subsection is based on a similar method for
the design of odd�stacked CMFBs with critical sampling and near�PR introduced in
����� We shall extend the method discussed in ���� to a constrained optimization of
paraunitary� oversampled� even�stacked or odd�stacked CMFBs�
The optimization method discussed in Subsection ���� is very time�consuming be�
cause of the quadratic side constraints ������ Adopting an iterative approach� we may

CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−70
−60
−50
−40
−30
−20
−10
0
10
Mag
nitu
de R
espo
nse
(dB
)
(a)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
−60
−40
−20
0
Mag
nitu
de R
espo
nse
(dB
)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
−60
−40
−20
0
(b)
Mag
nitu
de R
espo
nse
(dB
)
Figure ��� Design of critically sampled paraunitary CMFBs� a Odd�stacked CMFBwith N ! � and M ! �� b even�stacked CMFB with �N ! �� and �M ! �� upper
plot� �lters Hk�z� k ! �� � ���� N� lower plot� �lters (Hk�z� k ! � ���� N��
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−70
−60
−50
−40
−30
−20
−10
0
10
Mag
nitu
de R
espo
nse
(dB
)
(a)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
−60
−40
−20
0M
agni
tude
Res
pons
e (d
B)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
−60
−40
−20
0
(b)
Mag
nitu
de R
espo
nse
(dB
)
Figure ��� Design of oversampled paraunitary CMFBs� a Odd�stacked CMFB withN ! � and M ! �� b even�stacked CMFB with �N ! �� and �M ! � upper plot�
�lters Hk�z� k ! �� � ���� N� lower plot� �lters (Hk�z� k ! � ���� N��
linearize ����� according to
chk�hk���l�
�! MP
�Xi���
hk���n� iN � hk�n� �i " �l�N � ! ��l� � ������
where k denotes the iteration index �k ! � �� ����� This is indeed linear in the current
impulse response hk�n�� The kth iteration of the constrained optimization now goes as
follows�
� Minimize Ch ! hTPh subject to the linear side constraint �������
hk ! arg minh
hTPh subject to chk�hk���l� ! ��l� �
Note that hk depends on hk�� via the side constraint�

���� DESIGN METHODS
�� If khk � hk��k � �� where � is a prescribed tolerance level� stop the iteration�
The result is hk��� Otherwise� set hk � �hk " � � ��hk�� �with some �xed �
between � and � and go back to Step with k � k " �
This iteration is initialized using a linear�phase lowpass prototype h� that is designed
by means of a standard method such as the Remez exchange algorithm� It should be
noted that the iteration stops only when hk hk��� in which case ������ is a good
approximation to the true paraunitarity condition ����� and thus paraunitarity is ap�
proximately satis�ed� By choosing the tolerance level � su�ciently small� paraunitarity
can be achieved with arbitrary accuracy�
This algorithm can be expected to converge once that the prototype changes little in
each iteration� Otherwise� the approximation of the paraunitarity side constraint will be
poor and the algorithm may not converge� In our design experiments� we observed that
� ! ��� �as recommended in ����� yields good convergence properties in most cases�
however� in some cases the algorithm did not converge at all� Especially for critically
sampled CMFBs we observed convergence problems�
We conclude this section with some design examples� Fig� ��a� shows a paraunitary
odd�stacked CMFB with N ! channels and decimation factor M ! � �oversampling
by ��� In Figs� ��b� and �c� a paraunitary even�stacked CMFB with �N ! channels
and decimation factor �M ! � �oversampling by �� is depicted� Both CMFBs use the
same prototype �lter �length L ! �� since the paraunitarity condition SDFT ! �I
is independent of the stacking type �see Section ����� The cost function was chosen
as Ch !���R�s
jH�ej����j� �� d� with �s ! ���� Straightforward calculations show that
this cost function can easily be expressed as a quadratic form Ch ! hT Ph� In this
example� the tolerance value was � ! ���� Thus� the resulting prototype is an excellent
approximation to a �true� paraunitary prototype� Observe that the prototype has about
��dB stopband attenuation�
Fig� ��a� shows a paraunitary odd�stacked CMFB with N ! � channels and deci�
mation factor M ! � �oversampling by ��� In Figs� ��b� and �c� a paraunitary even�
stacked CMFB with �N ! �� channels and decimation factor �M ! � �oversampling by
�� is depicted� Again� both CMFBs use the same prototype �lter �length L ! ����� The
cost function was chosen as Ch !���R�s
jH�ej����j� �� d� with �s ! ��� The tolerance value
was � ! ���� Note that the prototype �lter has about ��dB stopband attenuation�
����� Lattice Design
The lattice design method for CMFBs has been introduced in � � for critically sampled�
paraunitary� odd�stacked CMFBs� We shall next outline an extension of this method
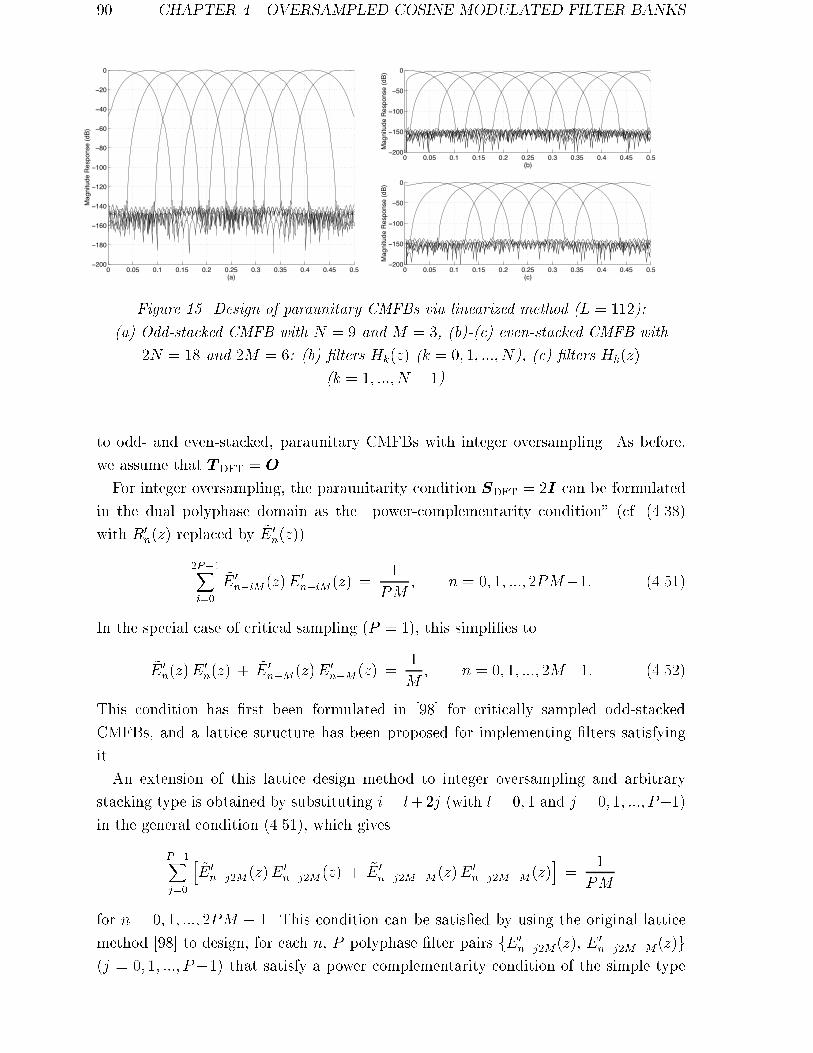
� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−200
−180
−160
−140
−120
−100
−80
−60
−40
−20
0
Mag
nitu
de R
espo
nse
(dB
)
(a)0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
−200
−150
−100
−50
0
(c)
Mag
nitu
de R
espo
nse
(dB
)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−200
−150
−100
−50
0
Mag
nitu
de R
espo
nse
(dB
)
(b)
Figure ��� Design of paraunitary CMFBs via linearized method L ! ��
a Odd�stacked CMFB with N ! and M ! �� b�c even�stacked CMFB with
�N ! and �M ! �� b �lters Hk�z� k ! �� � ���� N� c �lters (Hk�z�
k ! � ���� N � �
to odd� and even�stacked� paraunitary CMFBs with integer oversampling� As before�
we assume that TDFT ! O�
For integer oversampling� the paraunitarity condition SDFT ! �I can be formulated
in the dual polyphase domain as the �power�complementarity condition� �cf� ���� �
with R�n�z� replaced by #E �n�z��
�P��Xi��
#E �n�iM�z�E �
n�iM�z� !
PM� n ! �� � ���� �PM�� �����
In the special case of critical sampling �P ! �� this simpli�es to
#E �n�z�E
�n�z� " #E �
n�M�z�E �n�M�z� !
M� n ! �� � ���� �M�� ������
This condition has �rst been formulated in � � for critically sampled odd�stacked
CMFBs� and a lattice structure has been proposed for implementing �lters satisfying
it�
An extension of this lattice design method to integer oversampling and arbitrary
stacking type is obtained by substituting i ! l"�j �with l ! �� and j ! �� � ���� P��in the general condition ������ which gives
P��Xj��
h#E �n�j�M�z�E �
n�j�M�z� " #E �n�j�M�M�z�E �
n�j�M�M�z�i!
PM
for n ! �� � ���� �PM � � This condition can be satis�ed by using the original lattice
method � � to design� for each n� P polyphase �lter pairs fE �n�j�M�z�� E �
n�j�M�M�z�g�j ! �� � ���� P�� that satisfy a power complementarity condition of the simple type

��� EFFICIENT IMPLEMENTATION
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−200
−180
−160
−140
−120
−100
−80
−60
−40
−20
0
Mag
nitu
de R
espo
nse
(dB
)
(a)0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5
−200
−150
−100
−50
0
(c)
Mag
nitu
de R
espo
nse
(dB
)
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.5−200
−150
−100
−50
0
Mag
nitu
de R
espo
nse
(dB
)
(b)
Figure ��� Design of paraunitary CMFBs via linearized method L ! ����
a Odd�stacked CMFB with N ! � and M ! �� b�c even�stacked CMFB with
�N ! �� and �M ! �� b �lters Hk�z� k ! �� � ���� N� c �lters (Hk�z�
k ! � ���� N � �
������� i�e��
#E �n�j�M�z�E �
n�j�M�z� " #E �n�j�M�M�z�E �
n�j�M�M�z� !
P �M�
Imposing the symmetry property ������ on h�n� to achieve TDFT ! O results in a
symmetry relation of the polyphase components� which reduces the e�ective number of
polyphase �lters to be designed� For details on the impact of prototype symmetry on the
polyphase �lters the interested reader is referred to � �� The advantage of this lattice
design method is that paraunitarity is inherently satis�ed and need not be included as
a side constraint�
�� E�cient Implementation
This section proposes e�cient DCT�DST�based implementations of oversampled and
critically sampled CMFBs of either stacking type�
����� Implementation of Even�Stacked CMFBs
We �rst extend the DCT�based implementation of critically sampled Lin�Vaidyanathan
FBs ���� to arbitrary even�stacked CMFBs with integer oversampling� Let us de�ne
the �N �dimensional analysis �lter vector
h�z��! �H��z� H��z� � � �HN�z� (H��z� (H��z� � � � (HN���z��
T �
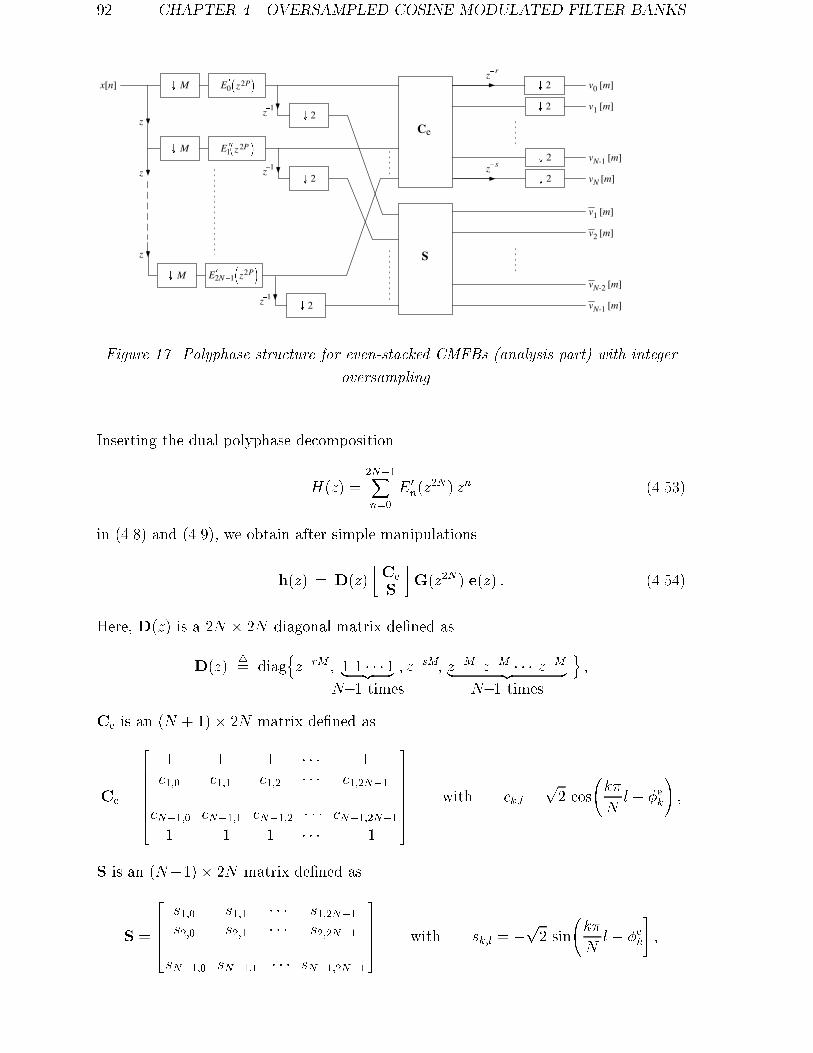
� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
z 1
Ce
S
z r
z s
M
2
M
2
M
2
2
2
2
2
x[n]
z 1
z 1
v0 [m]
v1 [m]
vN-1 [m]
vN [m]
v1 [m]
v2 [m]
vN-2 [m]
vN-1 [m]
z
z
z
E2N 1 z2P
E0 z2P
E1 z2P
Figure ��� Polyphase structure for even�stacked CMFBs analysis part with integer
oversampling�
Inserting the dual polyphase decomposition
H�z� !�N��Xn��
E �n�z
�N � zn ������
in ��� � and ����� we obtain after simple manipulations
h�z� ! D�z��Ce
S
�G�z�N � e�z� � ������
Here� D�z� is a �N � �N diagonal matrix de�ned as
D�z��! diag
nz�rM � � � �� �z �
N� times
� z�sM� z�M z�M � � � z�M� �z �N� times
o�
Ce is an �N " �� �N matrix de�ned as
Ce !
��������
� � � c��� c��� c��� � � � c���N�����
������
������
cN���� cN���� cN���� � � � cN����N�� � � � � �
�������� with ck�l !
p� cos
�k�
Nl � ek
��
S is an �N��� �N matrix de�ned as
S !
�����
s��� s��� � � � s���N��s��� s��� � � � s���N�����
������
���sN���� sN���� � � � sN����N��
����� with sk�l ! �
p� sin
�k�
Nl � ek
��

��� EFFICIENT IMPLEMENTATION �
z 1
Ce
S
M
2
M
2
M
2
x[n]
z 1
z 1
v0 [m]
v1 [m]
vN [m]
v1 [m]
v2 [m]
vN-1 [m]
z
z
z
2
2
2
E2N 1 z2P
E0 z2P
E1 z2P
Figure � � Polyphase structure for Lin�Vaidyanathan CMFB analysis part with
integer oversampling�
G�z� is a �N � �N diagonal matrix de�ned as G�z� ! diag fE �n�z�g�N��n�� � and e�z� !
� z � � � z�N���T � Straightforward manipulation of ������ �using noble identities ����
leads to an e�cient polyphase structure of the analysis part of the CMFB that is shown
in Fig� �� Here (vk�n� denotes the subband signals corresponding to the �lters (Hk�z�
with k ! � �� ���� N � � This implementation requires �N polyphase �lters plus the
matrix multiplications by Ce and S� these matrix multiplications can be implemented
using fast DCT and DST algorithms ���� For ! � and r ! s ! � �Lin�Vaidyanathan
CMFB�� further simpli�cations are possible that yield the implementation depicted in
Fig� � This extends the implementation in ���� to the case of integer oversampling�
Finally� an analogous derivation leads to similarly e�cient implementations of the
synthesis FB�
����� Implementation of Odd�Stacked CMFBs
The e�cient implementation of critically sampled odd�stacked CMFBs has previously
been studied in ��� �� �� �� These implementations will now be extended to integer
oversampling �N ! PM��
Inserting the dual polyphase decomposition ������ in ����� and proceeding sim�
ilarly as in Subsection ����� it follows that the analysis �lter vector h�z� !
�H��z� H��z� � � � HN���z��T can be written as
h�z� ! CoG��z�N � e�z� �where Co is an N � �N matrix de�ned as �Co�k�l !
p� cos
� k�����
Nl � ok
�� G�z� !

� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
Co
M
M
M
v0 [m]
v1 [m]
vN-1 [m]
z
z
z
x[n]
E1 z2P
E0 z2P
E2N 1 z2P
Figure ��� Polyphase structure for odd�stacked CMFBs analysis part with integer
oversampling�
diag fE �n�z�g�N��n�� and e�z� ! � z � � � z�N���T � The use of noble identities and other
manipulations yield the e�cient polyphase structure shown in Fig� � This implemen�
tation requires �N polyphase �lters plus the matrix multiplication by Co� this matrix
multiplication can be implemented using fast DCT algorithms ���� We note that a
similarly e�cient implementation exists for the CMFB�s synthesis part�
����� General Oversampling
The particularly e�cient polyphase structures proposed in Subsections ���� and �����
can be used only in the case of integer oversampling or critical sampling� For general
oversampling� CMFBs still allow a fairly e�cient DCT�DST�based implementation if
FIR prototypes are used� For example� the subband signals in an oversampled or
critically sampled� odd�stacked CMFB can be written as
vk�m� ! hx� hCM�ok�m i !
p�
L��Xn��
x�mM � n� h�n� cos
��k " ����
Nn" ok
��
where L is the length of the FIR analysis prototype h�n�� Hence� the subband signals
can be e�ciently calculated by applying a fast DCT algorithm to x�n� locally windowed
by h�n�� A DCT�based implementation exists also for the synthesis part� Further�
more� a similar DCT� and DST�based implementation can be developed for even�stacked
CMFBs with arbitrary oversampling� The blockwise operation of the overall algorithm
is described in ����
��� Image Coding with EvenStacked CMFBs
It is well known in subband image coding that linear phase �lters are of particular
importance� because nonlinear phase �lters lead to undesirable artifacts in the recon�
structed image ����� Since the new class of even�stacked CMFBs allows for both linear
phase �lters in all channels and PR� it is a promising candidate for use in subband image
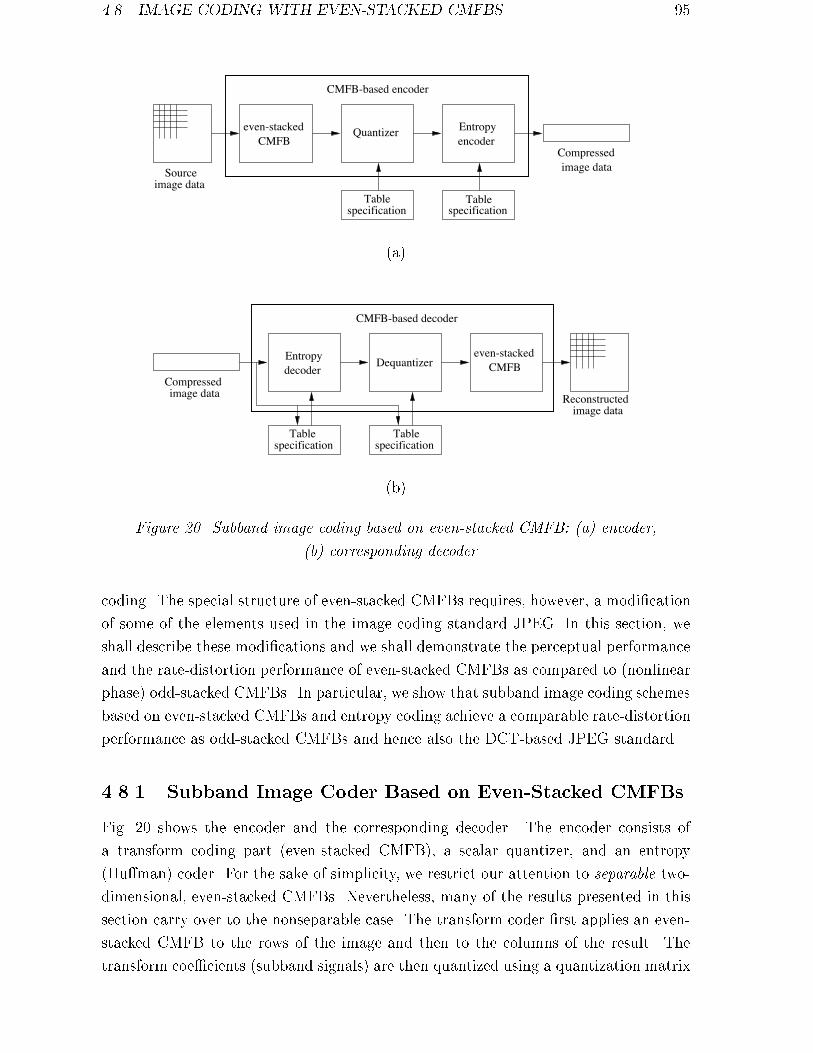
���� IMAGE CODING WITH EVENSTACKED CMFBS �
CMFBQuantizer
CMFB-based encoder
specificationTable
Entropyencoder
Tablespecification
Compressedimage dataSource
image data
even-stacked
�a�
image data
Compressedimage data
decoderEntropy
Dequantizer
specificationTable Table
specification
CMFB-based decoder
even-stackedCMFB
Reconstructed
�b�
Figure ��� Subband image coding based on even�stacked CMFB� a encoder�
b corresponding decoder�
coding� The special structure of even�stacked CMFBs requires� however� a modi�cation
of some of the elements used in the image coding standard JPEG� In this section� we
shall describe these modi�cations and we shall demonstrate the perceptual performance
and the rate�distortion performance of even�stacked CMFBs as compared to �nonlinear
phase� odd�stacked CMFBs� In particular� we show that subband image coding schemes
based on even�stacked CMFBs and entropy coding achieve a comparable rate�distortion
performance as odd�stacked CMFBs and hence also the DCT�based JPEG standard�
�� �� Subband Image Coder Based on Even�Stacked CMFBs
Fig� �� shows the encoder and the corresponding decoder� The encoder consists of
a transform coding part �even�stacked CMFB�� a scalar quantizer� and an entropy
�Hu�man� coder� For the sake of simplicity� we restrict our attention to separable two�
dimensional� even�stacked CMFBs� Nevertheless� many of the results presented in this
section carry over to the nonseparable case� The transform coder �rst applies an even�
stacked CMFB to the rows of the image and then to the columns of the result� The
transform coe�cients �subband signals� are then quantized using a quantization matrix
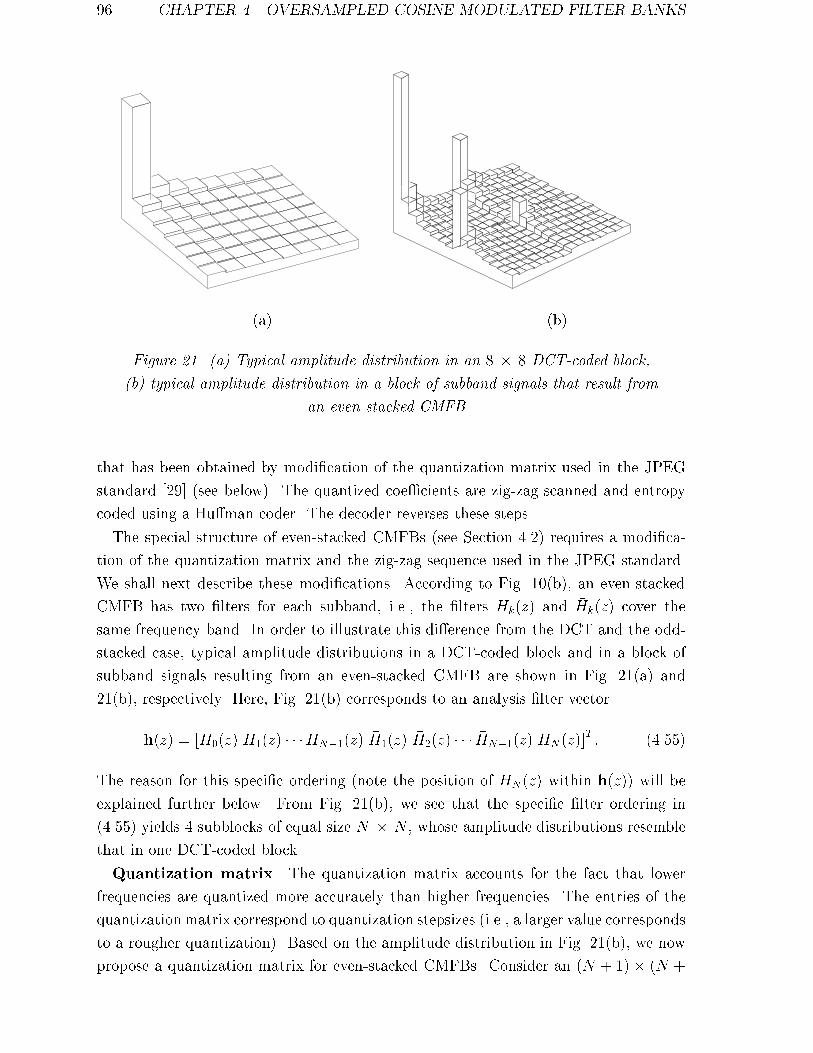
� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
�a� �b�
Figure ��� a Typical amplitude distribution in an � DCT�coded block�
b typical amplitude distribution in a block of subband signals that result from
an even�stacked CMFB�
that has been obtained by modi�cation of the quantization matrix used in the JPEG
standard ��� �see below�� The quantized coe�cients are zig�zag scanned and entropy
coded using a Hu�man coder� The decoder reverses these steps�
The special structure of even�stacked CMFBs �see Section ���� requires a modi�ca�
tion of the quantization matrix and the zig�zag sequence used in the JPEG standard�
We shall next describe these modi�cations� According to Fig� ��b�� an even�stacked
CMFB has two �lters for each subband� i�e�� the �lters Hk�z� and (Hk�z� cover the
same frequency band� In order to illustrate this di�erence from the DCT and the odd�
stacked case� typical amplitude distributions in a DCT�coded block and in a block of
subband signals resulting from an even�stacked CMFB are shown in Fig� ��a� and
��b�� respectively� Here� Fig� ��b� corresponds to an analysis �lter vector
h�z� ! �H��z� H��z� � � �HN���z� (H��z� (H��z� � � � (HN���z� HN�z��T � ������
The reason for this speci�c ordering �note the position of HN�z� within h�z�� will be
explained further below� From Fig� ��b�� we see that the speci�c �lter ordering in
������ yields � subblocks of equal size N � N � whose amplitude distributions resemble
that in one DCT�coded block�
Quantization matrix� The quantization matrix accounts for the fact that lower
frequencies are quantized more accurately than higher frequencies� The entries of the
quantization matrix correspond to quantization stepsizes �i�e�� a larger value corresponds
to a rougher quantization�� Based on the amplitude distribution in Fig� ��b�� we now
propose a quantization matrix for even�stacked CMFBs� Consider an �N " �� �N "
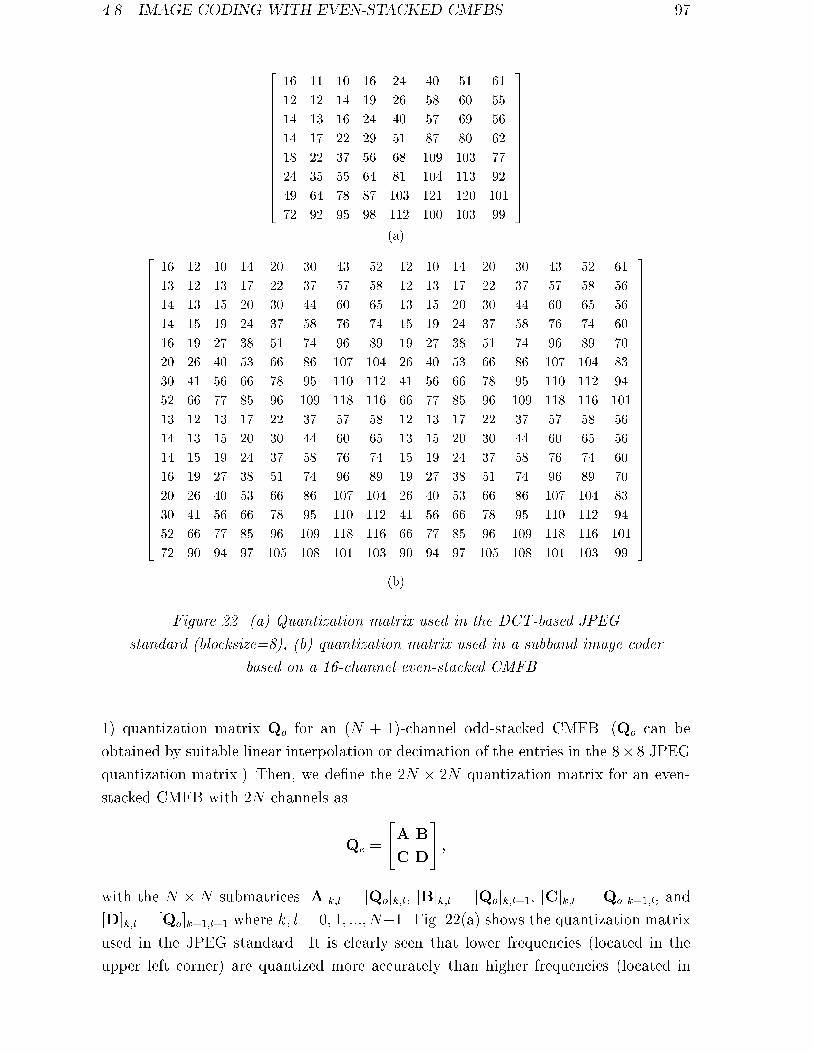
���� IMAGE CODING WITH EVENSTACKED CMFBS �
���������������
�� �� �� �� �� �� �� ��
�� �� �� �� �� �� �� ��
�� �� �� �� �� �� �� ��
�� �� �� �� �� �� �� ��
�� �� �� �� �� ��� ��� ��
�� �� �� �� �� ��� ��� ��
�� �� �� �� ��� ��� ��� ���
�� �� �� �� ��� ��� ��� ��
���������������
�a�����������������������������������
�� �� �� �� �� �� �� �� �� �� �� �� �� �� �� ��
�� �� �� �� �� �� �� �� �� �� �� �� �� �� �� ��
�� �� �� �� �� �� �� �� �� �� �� �� �� �� �� ��
�� �� �� �� �� �� �� �� �� �� �� �� �� �� �� ��
�� �� �� �� �� �� �� �� �� �� �� �� �� �� �� ��
�� �� �� �� �� �� ��� ��� �� �� �� �� �� ��� ��� ��
�� �� �� �� �� �� ��� ��� �� �� �� �� �� ��� ��� ��
�� �� �� �� �� ��� ��� ��� �� �� �� �� ��� ��� ��� ���
�� �� �� �� �� �� �� �� �� �� �� �� �� �� �� ��
�� �� �� �� �� �� �� �� �� �� �� �� �� �� �� ��
�� �� �� �� �� �� �� �� �� �� �� �� �� �� �� ��
�� �� �� �� �� �� �� �� �� �� �� �� �� �� �� ��
�� �� �� �� �� �� ��� ��� �� �� �� �� �� ��� ��� ��
�� �� �� �� �� �� ��� ��� �� �� �� �� �� ��� ��� ��
�� �� �� �� �� ��� ��� ��� �� �� �� �� ��� ��� ��� ���
�� �� �� �� ��� ��� ��� ��� �� �� �� ��� ��� ��� ��� ��
����������������������������������
�b�
Figure ��� a Quantization matrix used in the DCT�based JPEG
standard blocksize� � b quantization matrix used in a subband image coder
based on a ���channel even�stacked CMFB�
� quantization matrix Qo for an �N " ��channel odd�stacked CMFB� �Qo can be
obtained by suitable linear interpolation or decimation of the entries in the � JPEG
quantization matrix�� Then� we de�ne the �N � �N quantization matrix for an even�
stacked CMFB with �N channels as
Qe !
��A B
C D
�� �
with the N � N submatrices �A�k�l ! �Qo�k�l� �B�k�l ! �Qo�k�l�� �C�k�l ! �Qo�k��l� and
�D�k�l ! �Qo�k��l� where k� l ! �� � ���� N�� Fig� ���a� shows the quantization matrix
used in the JPEG standard� It is clearly seen that lower frequencies �located in the
upper left corner� are quantized more accurately than higher frequencies �located in

CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
(1,1)0,0C 0,0
(1,1)C
(0,1)0,0CC
0,1C
C(0,0)C
(1,0)0,1C
(0,0)0,0 0,1
(0,1)0,1
(1,0)
�a� �b�
Figure ��� a Zig�zag sequence used in a DCT�coded block� b zig�zag sequence used
in a block of subband signals that result from even�stacked CMFBs�
the lower right corner�� Fig� ���b� shows a quantization matrix Qe for use with a
��channel even�stacked CMFB� The four � submatrices A�B�C�D can easily be
distinguished�
Zig�zag scanning� In the DCT�based JPEG standard� the quantized transform
coe�cients are zig�zag scanned before entropy encoding� This produces long runs of
zeros which can be encoded very e�ciently� For even�stacked CMFBs� the fact that the
�lters Hk�z� and (Hk�z� for given k � f� �� ���� N�g cover the same frequency band
requires a modi�ed zig�zag sequence since standard zig�zag scanning would result in
signi�cantly shorter runs of zeros�
The speci�c �lter ordering in ������ yields � subblocks of equal size N � N � whose
amplitude distributions resemble that in one DCT�coded block �cf� Fig���� This sug�
gests to de�ne the modi�ed zig�zag sequence by interleaving the zig�zag scanned values
of the four N � N subblocks �see Fig� ���b��� That is� the modi�ed zig�zag sequence
for even�stacked CMFBs is
s ! �C ������� C
������� C
������� C
������� C
������� C
������� C
������� C
������� ���� �
where the superscript i�j� �i� j ! �� � and subscript k�l �k� l ! �� � ���� N�� in C i�j�k�l
identify the subblock and the frequency index� respectively�
An alternative ordering of the analysis �lters is
h�z� ! �H��z� H��z� (H��z� ��� HN���z� (HN���z� HN�z��T � ������
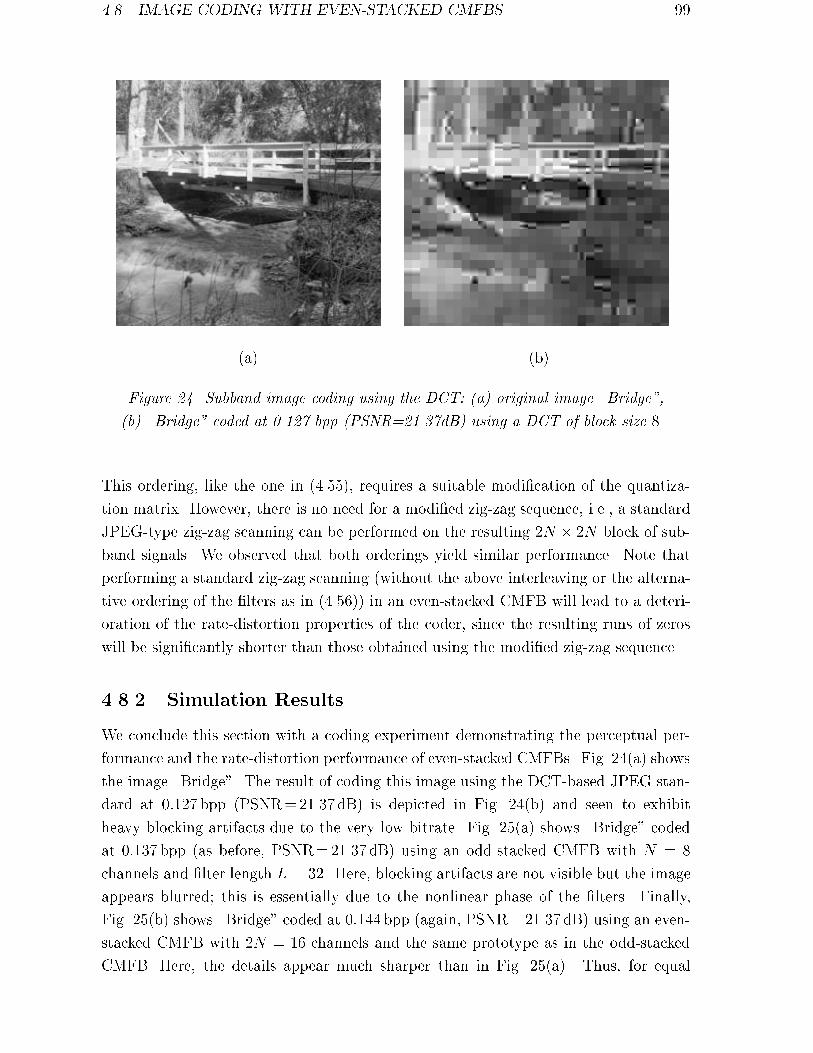
���� IMAGE CODING WITH EVENSTACKED CMFBS
�a� �b�
Figure ��� Subband image coding using the DCT� a original image �Bridge��
b �Bridge� coded at ����� bpp PSNR������dB using a DCT of block size �
This ordering� like the one in ������� requires a suitable modi�cation of the quantiza�
tion matrix� However� there is no need for a modi�ed zig�zag sequence� i�e�� a standard
JPEG�type zig�zag scanning can be performed on the resulting �N � �N block of sub�
band signals� We observed that both orderings yield similar performance� Note that
performing a standard zig�zag scanning �without the above interleaving or the alterna�
tive ordering of the �lters as in ������� in an even�stacked CMFB will lead to a deteri�
oration of the rate�distortion properties of the coder� since the resulting runs of zeros
will be signi�cantly shorter than those obtained using the modi�ed zig�zag sequence�
�� �� Simulation Results
We conclude this section with a coding experiment demonstrating the perceptual per�
formance and the rate�distortion performance of even�stacked CMFBs� Fig� ���a� shows
the image �Bridge�� The result of coding this image using the DCT�based JPEG stan�
dard at ���� bpp �PSNR!���� dB� is depicted in Fig� ���b� and seen to exhibit
heavy blocking artifacts due to the very low bitrate� Fig� ���a� shows �Bridge� coded
at ���� bpp �as before� PSNR!���� dB� using an odd�stacked CMFB with N !
channels and �lter length L ! ��� Here� blocking artifacts are not visible but the image
appears blurred� this is essentially due to the nonlinear phase of the �lters� Finally�
Fig� ���b� shows �Bridge� coded at ���� bpp �again� PSNR!���� dB� using an even�
stacked CMFB with �N ! � channels and the same prototype as in the odd�stacked
CMFB� Here� the details appear much sharper than in Fig� ���a�� Thus� for equal

�� CHAPTER �� OVERSAMPLED COSINE MODULATED FILTER BANKS
�a� �b�
Figure ��� Subband image coding using CMFBs� a �Bridge� coded at
����� bpp PSNR������dB using an odd�stacked CMFB �N ! M ! ��
b �Bridge� coded at ����� bpp PSNR������dB using an
even�stacked CMFB ��N ! �M ! ���
PSNR� the even�stacked CMFB outperforms the odd�stacked CMFB and also the DCT
from a perceptual point of view�
Fig� �� demonstrates that even�stacked CMFBs achieve comparable rate�distortion
performance as the DCT�based JPEG standard and as odd�stacked CMFBs� Note�
however� that the rate�distortion properties of even�stacked and of odd�stacked CMFBs
will be comparable only if the even�stacked CMFB uses twice the number of channels as
the odd�stacked CMFB� This is so� since in an even�stacked CMFB with �N channels
there are e�ectively N di�erent channels �frequencies�� Furthermore� the bandwidth of
the �lters in a �N �channel even�stacked CMFB is equal to the bandwidth of the �lters in
an N �channel odd�stacked CMFB� Since the rate�distortion performance of the subband
coders investigated in this section depends critically on the bandwidth of the channel
�lters �the channels are coded mutually independent�� it is not surprising that the rate�
distortion performance of an N �channel odd�stacked CMFB will be similar to that of a
�N �channel even�stacked CMFB� We emphasize that� even though the rate�distortion
performance of even�stacked CMFBs is not better than that of odd�stacked CMFBs or
the DCT� even�stacked CMFBs have a clearly improved perceptual performance due to
their linear phase property�

���� IMAGE CODING WITH EVENSTACKED CMFBS �
DCT
odd−stacked CMFB
even−stacked CMFB
0 0.5 1 1.516
18
20
22
24
26
28
30
bpp
PS
NR
/ dB
Figure ��� Rate�distortion characteristics of the DCT and odd�and even�stacked
CMFBs for image �Lena��


Chapter �
Noise Analysis and Design Freedom
in Oversampled Filter Banks
In this chapter we show that oversampled FBs have noise reducing properties� We
present a noise analysis and we derive bounds on the variance of the reconstruction error
caused by noisy subband signals� We discuss the dependence of the reconstruction error
on the oversampling factor and we show that the frame bound ratio B�A �see Sec� �����
serves as a condition number of the FB�
We furthermore show that there exists an important tradeo� between noise reduc�
tion and design freedom in oversampled FBs� We prove that the synthesis FB corre�
sponding to the para�pseudo�inverse of the analysis polyphase matrix minimizes the
reconstruction error variance resulting from additive white uncorrelated noise in the
FB�s subbands� We furthermore derive the synthesis FB minimizing the reconstruc�
tion error variance for arbitrary perturbation noise statistics� Using other synthesis
FBs �generalized inverses of the analysis FB� leads to an additional noise component
that often signi�cantly increases the reconstruction error� We present a design example
demonstrating the tradeo� between noise reduction and design freedom in oversampled
FBs�
Our results are based on a signal space framework that can be applied to redun�
dant representations in general� In Section ��� we shall �rst apply this signal space
framework to oversampled analog�to�digital �A�D� conversions� since here the under�
lying spaces have a very simple structure� We interpret oversampled A�D conversions
as continuous�time frame expansions� Based on this viewpoint� we then establish the
tradeo� between noise reduction and design freedom arising in oversampled A�D conver�
sions� In Section ���� we then proceed with an extension of this signal space framework
to oversampled FBs�
��

�� CHAPTER �� NOISE ANALYSIS
��� Noise Analysis and Design Freedom in Over
sampled A D Conversion
The conversion from continuous or analog signals to digital representations is usually
called analog�to�digital conversion �A�D conversion�� It is well known that a band�
limited continuous�time signal can be perfectly recovered from its sampled version if
the sampling rate is twice the bandwidth of the analog signal ��� So� in theory there
is no need to oversample the analog signal� In practice� however� oversampling methods
have recently become very popular because they avoid many of the practical di�culties
encountered with conventional methods for A�D conversion� Conventional converters
have attributes that make their implementation in VLSI technology di�cult� The use of
analog �lters� the need for high precision analog circuits� and the vulnerability to noise
and interference render conventional converters inferior to oversampling converters� The
advantage of conventional methods is a relatively low sampling frequency� usually close
to the Nyquist rate� i�e�� twice the signal bandwidth� Oversampling converters can
use simple analog components with relatively high tolerance� but they require fast and
complex digital signal processing stages ����
In the following� we interpret critically sampled and oversampled A�D conversions as
frame expansions� Based on this interpretation� we develop a signal space framework
that will serve to establish an important tradeo� between noise reduction and design
freedom in oversampled A�D conversion�
����� A�D Conversion as a Frame Expansion
Let us consider a band�limited continuous�time signal x�t� with bandwidth �counting
positive frequencies only� B�� From the sampling theorem �� we know that this sig�
nal can be perfectly recovered from its samples taken uniformly at a rate Fs � �B��
The cases Fs ! �B� and Fs � �B� are referred to as critical sampling �sampling at
the Nyquist rate� and oversampling� respectively� We shall next provide an interpreta�
tion of critically sampled and oversampled A�D conversion as a continuous�time frame
expansion�
Frame expansion� The signal space under consideration is the Hilbert space H of
B��band�limited functions� Due to the sampling theorem any signal x�t� � H can be
represented as ��
x�t� !
K
�Xk���
x�kT � sinc���B��t� kT ��� ����
where sinc�t� ! sin tt� T ! �
Fswith Fs � �B� and K ! Fs
�B�is the oversampling factor�
The samples x�kT � can be written as the inner product of the signal x�t� with the

���� NOISE ANALYSIS AND DESIGN FREEDOM ��
functions gk�t� ! �B� sinc���B��t� kT ��� Indeed� using the fact that the signal x�t� is
B��band�limited we get
x�kT � !Z B�
�B�
X�f� ej��kTf df !DX�Gk
E! hx� gki�
where� Gk�f� ! rectB��f� e�j��kTf is the Fourier transform of gk�t�� We can thus rewrite
���� as
x�t� !
Fs
�Xk���
hx� gki gk�t� with gk�t� ! �B� sinc���B��t� kT ���
Therefore� the interpolation of an analog signal from its sample values x�kT � can be
considered as the reconstruction of x�t� from its expansion coe�cients x�kT � ! hx� gki�The overall process of A�D conversion can be interpreted as expanding the signal x�t�
into the function set fgk�t�g with k�ZZ� Since every x�t� � H can be represented as a
linear combination of the functions gk�t�� the set fgk�t�g is obviously complete in H�
We shall next calculate the frame operator of fgk�t�g� Using De�nition � and the
Parseval identity� the frame operator S can be formulated in the frequency domain as
� �SX��f� !�X
k���hX�GkiGk�f� ! Fs rectB��f�X�f��
Since � �SX��f� ! FsX�f� for x�t� � H� fgk�t�g is a tight frame for the space H of
B��band�limited functions� with frame bound A ! B ! Fs� Hence� the dual frame is
given by
#gk�t� !
Fsgk�t�� �����
Using Theorem A�� we get
x�t� !�X
k���hx� gki #gk�t� !
K
�Xk���
x�kT � sinc���B��t� kT ��� �����
which shows that the reconstruction formula ���� corresponds to a reconstruction using
the dual frame� Moreover� it is easily checked that for critical sampling �T ! ��B�
�
the gk�t� are orthogonal to each other� i�e�� hgk� gli ! �B� ��l � k�� Thus� a critically
sampled A�D conversion can be interpreted as an orthogonal signal expansion� In the
oversampled case the set fgk�t�g is a tight frame for H�
Sampling and interpolation operators� The sampling operation and the recon�
struction of the analog signal x�t� from its samples x�kT � can be interpreted as the
application of linear operators to the signal x�t� and to its samples x�kT �� respectively�
�Here rectB��f� denotes a function that is � in the interval ��B�� B�� and zero elsewhere�
�� CHAPTER �� NOISE ANALYSIS
The analysis operator T �cf� Section A�� acts on the signal x�t� � H and provides the
samples x�kT ��
T � x � x�kT � or equivalently �Tx�k ! x�kT ��
The sampling operator T thus provides a mapping from the Hilbert space H of B��
band�limited functions to the space l��ZZ� of square�summable discrete�time signals�
The synthesis operator �T � performs a reconstruction of the signal x�t� from its samples
x�kT � via interpolation� i�e��
�T�� x�kT � � x�t� with
��T�x�kT �
��t� !
K
�Xk���
x�kT � sinc���B��t� kT ���
����� Design Freedom in Oversampled A�D Conversion
The reconstruction of the analog signal x�t� from its samples x�kT � can alternatively
be interpreted as the application of an ideal lowpass �lter with bandwidth B� to the
signal x�t�P�
k��� ��t�kT � !P�
k��� x�kT � ��t�kT �� In the case of critical sampling�
the ideal lowpass �lter of bandwidth B� is the only �lter that provides PR of the signal
x�t� �see Fig� ���a��� In the oversampled case� there is in general an in�nite number
of reconstruction �lters providing PR� The only requirement is that the reconstruc�
tion �lter�s transfer function is constant within the signal band �B� � f � B� �see
Figs� ���b���c��� Therefore� in the oversampled case one has more freedom in design�
ing the reconstruction �lter ���� In practice� this additional freedom is exploited for
designing reconstruction �lters with desirable �lter characteristics like e�g� rollo� �see
Fig� ���c��� This situation parallels the fact that� for a given analysis FB� the synthesis
FB providing PR is uniquely determined in the critically sampled case� whereas it is
not uniquely determined in the oversampled case �see Subsec� ������
����� Noise Analysis in Oversampled A�D Conversion
This subsection presents a noise analysis for oversampled A�D conversion� We �rst
assume that the reconstruction �lter is the ideal lowpass �lter with bandwidth B��
Let us model the quantization error as discrete�time white noise with power spectral
density ��q � Then� the reconstruction error variance� i�e�� the variance of the error in the
reconstructed signal due to quantization� is given by
��c ! ��q�B� ! ��qFs
in the critical case and
��o ! ��q�B� ! ��qFsK

���� NOISE ANALYSIS AND DESIGN FREEDOM ��
�Fs�! �B�
Fs�! B�
f
�a�
�Fs�
Fs�
�B� B�
f
�b�
�Fs�
Fs�
�B� B�
f
�c�
Fig� ��� Reconstruction of analog signal by lowpass �ltering�
a critical case� b�c oversampled case� b ideal lowpass �lter with minimal
bandwidth� c generalized synthesis �lter�
in the case of oversampling by a factor of K �see Fig� � �� We therefore have
��o��c
!
K�
Hence� the noise power that falls into the signal band is inversely proportional to the
oversampling factor� Therefore� each doubling of the oversampling factor decreases the
in�band noise power by � dB�
When the reconstruction is performed using not the ideal lowpss �lter with bandwidth
B� but a generalized inverse� i�e�� some other �lter providing PR� it is obvious from
Fig� ���c� that the noise power in the reconstructed signal will increase� This is due to
the fact that a generalized reconstruction �lter will pass some of the noise in the out�of�
band region B� � f � Fs�� The amount of additional noise in the reconstructed signal
is determined by the bandwidth and the transfer function of the reconstruction �lter�
In this sense� there exists a tradeo� between noise reduction and design freedom in
oversampled A�D conversion� Practically desirable �or realizable� reconstruction �lters
�i�e� �lters with rollo�� lead to an additional reconstruction error�

� CHAPTER �� NOISE ANALYSIS
�Fs�! �B�
Fs�! B�
power spectral density of noise
f
�a�
�Fs�
Fs�
�B� B�
f
power spectral density of noise
�b�
Fig� � � Adding quantization noise to the sampled signal�
a critical case� b oversampled case�
We shall next interpret this result from a frame�theoretic point of view� Recall that
the reconstruction of the signal x�t� from its coe�cients x�kT � ! hx� gki using the ideal
lowpass �lter with bandwidth B� corresponds to a reconstruction using the dual frame
#gk�t� !�Fsgk�t�� The range space R of the sampling operator T is the space of discrete�
time functions band�limited in the interval � � �� ��K� ��K
�� Since reconstruction using
the ideal lowpass �lter of bandwidth B�� equivalently in the digital domain� bandwidth��K
corresponds to an orthogonal projection onto R� it follows that reconstruction with
the dual frame involves an orthogonal projection onto R ���� Thus� all noise in the
orthogonal complement R of the range space of T �corresponding to the out�of�band
region � ��K� ���� will be discarded� It is hence seen that reconstruction with the dual
frame leads to the minimum reconstruction error if noise is added to the signal samples�
In the next section� we shall see that a similar tradeo� between noise reduction and
design freedom arises in oversampled FBs� which are another special case of redundant
signal expansions� In oversampled FBs� however� the analysis is less intuitive since the
signal spaces R and R do not correspond to frequency bands�
��� Noise Analysis and Design Freedom in Over
sampled Filter Banks
One of the major advantages of oversampled FBs is their increased design freedom as
compared to critically sampled FBs� For a given oversampled analysis FB� the synthesis

���� NOISE ANALYSIS AND DESIGN FREEDOM �
FB providing PR is not uniquely determined �see Subsec� ������ This nonuniqueness
allows for the design of a broad class of PR synthesis FBs having desirable properties
that are not shared by the minimum norm synthesis FB�� Besides PR we can therefore
impose additional restrictions on the synthesis �lters and perform an optimization over
the class of synthesis FBs providing PR and satisfying our restrictions� Using the
parameterizations of all PR synthesis FBs given in Subsec� ����� this can be done using
an unconstrained optimization procedure since PR need not be incorporated via a side
constraint�
This increased design freedom is similar to the increased design freedom in over�
sampled A�D conversion� However� as in oversampled A�D conversion there exists a
tradeo� between noise reduction and design freedom in oversampled FBs�
In this section we shall investigate the sensitivity of oversampled FBs to �quantiza�
tion� noise� We shall show that the frame bound ratio B�A �see Subsec� ����� serves as
a condition number of the FB� We �nally perform a coding experiment that corroborates
the tradeo� between noise reduction and design freedom in oversampled FBs�
����� Noise Analysis for Oversampled Filter Banks
In this subsection� we investigate the sensitivity of oversampled FBs to �quantization�
noise qk�m� added to the subband signals vk�m� ! hx� hk�mi �k ! �� � ���� N��� The
input to the synthesis FB is now given by the noisy subband signals
v�k�m� ! vk�m� " qk�m� ! hx� hk�mi" qk�m��
Let us collect the noise signals qk�m� in the N �dimensional vector noise process q�m� !
�q��m� q��m� � � � qN���m��T that is assumed to be wide�sense stationary �WSS� and
zero�mean� The N �N power spectral matrix of q�m� is de�ned as ���
Sq�z� !�X
l���Cq�l� z
�l
with the autocorrelation matrix
Cq�l� ! Efq�m�qH �m� l�g�
where E denotes the expectation operator ����
Variance of reconstruction error� It is convenient to redraw the FB in the
polyphase domain as shown in Fig� � ���� Here� x�z� ! �X��z� X��z� ��� XM���z��T
�This is especially important in coding applications� where the subband signals are quantized and
therefore errors are introduced in the signal� In this case� the synthesis lters determine the perceptual
impact of the quantization error on the reconstructed signal� In the DCTbased JPEG standard�
for example� the discontinuities of the synthesis lters� impulse responses at their boundaries lead to
blocking artifacts�

� CHAPTER �� NOISE ANALYSIS
and x�z� ! � X��z� X��z� ��� XM���z��T with Xn�z� !P�
m��� x�mM " n� z�m and Xn�z� !
P�m��� x�mM " n� z�m� and the noise q�m� is represented by its z�transform
q�z� !P�
m��� q�m� z�m� Assuming a PR FB� we have �see Fig� �� x�z� ! x�z� "
R�z�q�z�� so that the reconstruction error vector e�z� is given by
e�z� ! x�z�� x�z� ! R�z�q�z� � �����
Here� R�z� denotes an arbitrary left�inverse of E�z�� The reconstruction error e�n� is
again WSS and zero�mean� with M �M power spectral matrix
Se�z� ! R�z�Sq�z� #R�z� �����
and variance ��� ��
��e !
M
Z �
�TrnSe�e
j����od�� �����
For uncorrelated white noise signals qk�m� with identical variances ��q ! Efjqk�m�j�g�k ! �� � ���� N � �� it follows that ���
Cq�l� ! ��q IN ��l� Sq�z� ! ��qIN �
Here� with ����� and ������ the reconstruction error variance becomes
��e !��qM
Z �
�TrnR�ej����RH�ej����
od�� �����
Frame�theoretic analysis of noise sensitivity� We now consider the case of
uncorrelated white noise signals� Furthermore� we assume that the FB provides a
frame expansion and that the reconstruction is performed using the dual frame� i�e��
R�z� ! R�z�� We recall from Subsection ���� that the �tightest possible� frame bounds
A� and B� of a FB providing a frame expansion are given by
A� ! ess inf�� ������ n���������M��
�n�ej���� � B� ! ess sup
�� ������ n���������M���n�e
j���� �
where �n��� denotes the eigenvalues of the inverse UFBF matrix S���ej���� !
R�ej����RH�ej�����
With TrnR�ej����RH�ej����
o!PM��
n�� �n��� and ��� �� it follows that MA� �TrnR�ej����RH�ej����
o�MB�� Inserting this in ������ we obtain
A� � ��e��q
� B� � ��� �
i�e�� the reconstruction error variance ��e is bounded in terms of the frame bounds A��
B� and the subband noise variance ��q � Let us assume normalized analysis �lters� i�e��
khkk ! for k ! �� � ���� N � � Then� it follows from Corollary ��� and A� ! �B�B� ! �
A

���� NOISE ANALYSIS AND DESIGN FREEDOM
E�z� R�z�
q�z�
x�z� x�z�
Figure ��� Adding noise to the subband signals�
that A� � �K� B�� where K ! N
Mis the oversampling factor� Hence� for A� B� or
equivalently B��A� � ��� � implies that
��e��q
Kwith K !
N
M�
Therefore small perturbations in the subbands yield a small reconstruction error� which
moreover is inversely proportional to the oversampling factor K ! NM� This shows that
FBs providing snug frame expansions are desirable in practical applications� since they
guarantee that small errors in the subband signals will result in small errors in the
reconstructed signal� In applications involving modi�cations of the subband signals�
this property is desired as well�
For a paraunitary FB with khkk ! we have A� ! B� ! �K� and hence ��� � becomes
��e��q
!
Kwith K !
N
M� ����
Since in the critically sampled case ��c�! ��e jK�� ! ��q � Eq� ���� can be rewritten as
��e��c
!
K�
Thus� in the paraunitary �tight� case the reconstruction error variance is inversely pro�
portional to the oversampling factor K� which means that more oversampling entails
more noise reduction� Such a ��K behavior� has been observed in Subsection ����
for oversampled A�D conversion� In fact� as already noted in Subsection ���� an over�
sampled A�D conversion is a tight frame expansion� Since paraunitary FBs correspond
to tight frames� the �K behavior of the reconstruction error variance in paraunitary�
oversampled FBs does not come as a surprise�
A �K behavior of the reconstruction error variance has also been observed for tight
frames in �nite�dimensional spaces ��� ��� and for the reconstruction from a �nite
set of Weyl�Heisenberg �Gabor� or wavelet coe�cients ��� ��� Recently� under addi�
tional conditions� a �K� behavior has been demonstrated for frames of sinc functions
��� �� � and for Weyl�Heisenberg frames ��� � ���� In �� ��� a nonlinear

� CHAPTER �� NOISE ANALYSIS
E�z� R�z�
Sq�z�
E q��z� R q��z�
��qIN
Figure ��� Adding correlated colored noise to the subband signals�
iterative method based on principles from set�theoretic estimation is used to achieve a
�K� behavior of the reconstruction error� In Chapter �� we shall propose oversampled
predictive subband coders which can do even better than �K��
Unfortunately� our assumption of uncorrelated� white noise signals is not realistic for
K � � For arbitrary �possibly correlated and nonwhite� noise signals with power
spectral matrix Sq�z�� a whitening system can be employed to transform the noise into
uncorrelated white noise� which in turn allows to use the results obtained above for the
uncorrelated white noise case� Assuming that the noise power spectral matrix Sq�z�
can be factored as
Sq�z� ! S���q �z�#S���q �z��
the system depicted in Fig� � is equivalent to a system with noise power spectral matrix
Sq�z� ! ��qIN �corresponding to uncorrelated white noise� if E�z� and R�z� are replaced
by
E q��z� !q��q S
����q �z�E�z� and R q��z� !
q��qR�z�S���q �z��
respectively �see Fig� ���� The double inequality ��� � continues to hold if the frame
bounds in ��� � are replaced by the frame bounds of the FB fE q��z��R q��z�g with
inverse UFBF matrix given by
S q���
�z� ! R q��z� #R q��z� !
��qR�z�Sq�z� #R�z�� �����
Similarly� the �K behavior of the reconstruction error variance continues to hold if
R q��z� is paraunitary� i�e�� R q��z� #R q��z� ! I�
����� Noise Reduction Versus Design Freedom in Filter Banks
In Subsection ���� we have seen that oversampled FBs o�er increased design freedom
as compared to critically sampled FBs� However� as in oversampled A�D conversion
there is a tradeo� between noise reduction and design freedom� This tradeo� is the
subject of this subsection�
Recall from Subsection ���� that the analysis FB operator T that assigns to each in�
put signal x�n� the vector signal v�m� comprising the subband signals vk�m� ! hx� hk�mi�
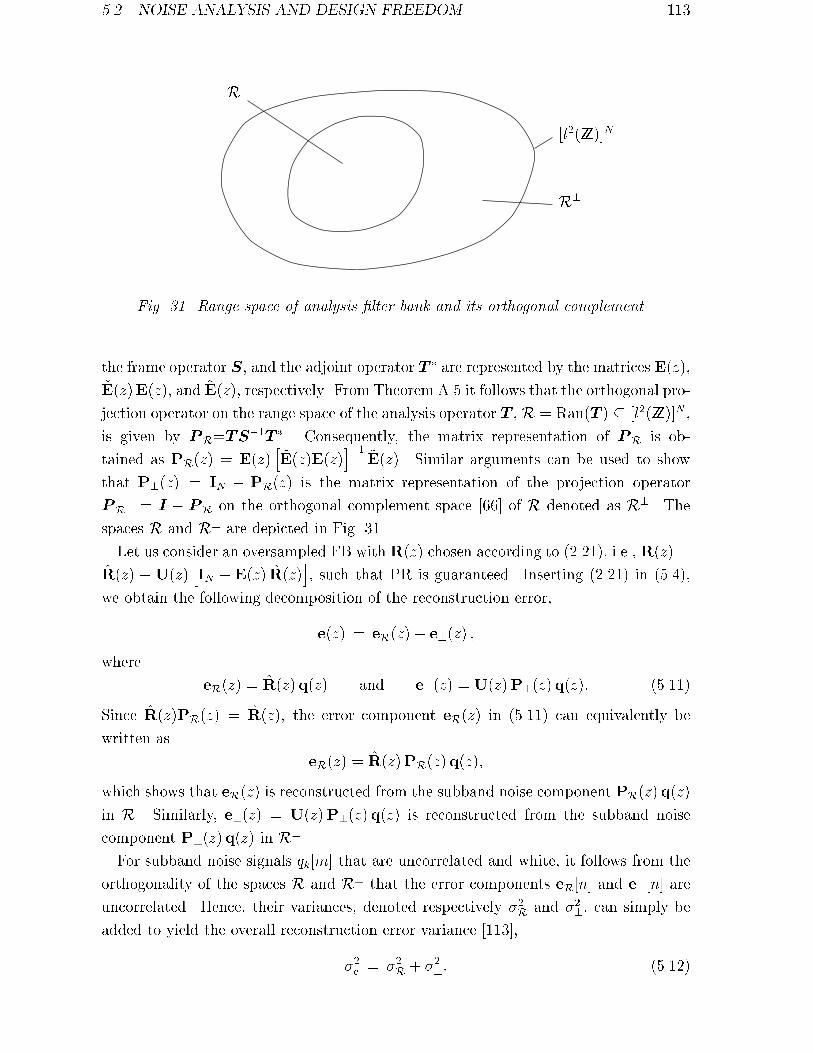
���� NOISE ANALYSIS AND DESIGN FREEDOM �
�l��ZZ��N
R
R
Fig� ��� Range space of analysis �lter bank and its orthogonal complement�
the frame operator S� and the adjoint operator T � are represented by the matrices E�z��#E�z�E�z�� and #E�z�� respectively� From Theorem A�� it follows that the orthogonal pro�
jection operator on the range space of the analysis operator T � R ! Ran�T � � �l��ZZ��N �
is given by PR!TS��T �� Consequently� the matrix representation of PR is ob�
tained as PR�z� ! E�z�h#E�z�E�z�
i�� #E�z�� Similar arguments can be used to show
that P�z� ! IN � PR�z� is the matrix representation of the projection operator
PR� ! I � PR on the orthogonal complement space ���� of R denoted as R� The
spaces R and R are depicted in Fig� ��
Let us consider an oversampled FB withR�z� chosen according to ������ i�e�� R�z� ! R�z� " U�z�
hIN � E�z� R�z�
i� such that PR is guaranteed� Inserting ����� in ������
we obtain the following decomposition of the reconstruction error�
e�z� ! eR�z� " e�z� �
where
eR�z� ! R�z�q�z� and e�z� ! U�z�P�z�q�z�� ����
Since R�z�PR�z� ! R�z�� the error component eR�z� in ���� can equivalently be
written as
eR�z� ! R�z�PR�z�q�z��
which shows that eR�z� is reconstructed from the subband noise component PR�z�q�z�
in R� Similarly� e�z� ! U�z�P�z�q�z� is reconstructed from the subband noise
component P�z�q�z� in R�
For subband noise signals qk�m� that are uncorrelated and white� it follows from the
orthogonality of the spaces R and R that the error components eR�n� and e�n� are
uncorrelated� Hence� their variances� denoted respectively ��R and ��� can simply be
added to yield the overall reconstruction error variance ����
��e ! ��R " ��� �����

� CHAPTER �� NOISE ANALYSIS
This leads to the following result�
Theorem ���� For white and uncorrelated subband noise signals in an
oversampled PR FB �R�z�E�z� ! IM�� the minimum norm synthesis FB
�corresponding to R�z�� the para�pseudo�inverse of E�z�� yields the min�
imum reconstruction error variance ��e�min ! ��R among all PR synthesis
FBs�
Proof� According to ����� the variance component ��R is independent of the param�
eter matrix U�z�� and thus of the particular R�z� chosen� The variance component ���
on the other hand� depends on U�z�� it is an additional variance that will be zero if
and only if R�z� ! R�z�� Indeed� it follows from ����� that R�z� ! R�z� if and only
if U�z�P�z� � �� in which case e�z� ! U�z�P�z�q�z� � o and thus also �� ! ��
�
Using R�z�� all noise components orthogonal to the range space R are suppressed�
whereas any other PR synthesis FB �possibly with desirable properties such as im�
proved frequency selectivity� leads to an additional error variance �� since also noise
components orthogonal to R are passed to the FB output� In this sense� there exists
a tradeo� between design freedom and noise reduction� At this point� we recall the
tradeo� between noise reduction and design freedom in oversampled A�D conversion
�see Subsection ������ where the range space was the space of ��K
�band�limited func�
tions� Even though in the FB case the range space and its orthogonal complement
take a somewhat more complicated form� the same interpretations and conclusions as
in oversampled A�D conversion apply�
In the case of correlated colored noise signals� i�e�� arbitrary noise power spectral
matrix Sq�z�� it follows from the noise whitening approach used in Subsection ����
that the above results continue to hold if the matrices E�z� and R�z� are replaced by
E q��z� and R q��z�� respectively� In particular� for a given analysis FB with polyphase
matrix E�z� and given noise with power spectral matrix Sq�z�� the equivalent synthesis
FB �cf� Fig� � ���� minimizing the reconstruction error variance has polyphase matrix R q��z� ! �#E q��z�E q��z���� #E q��z�� which yields
R�z� !q��q R
q��z�S����q �z� ! �#E�z�S��q �z�E�z���� #E�z�S��q �z��
We �nally note that the tradeo� between noise reduction and design freedom is
inherent in redundant representations in general� It is not restricted to redundant shift�
invariant signal expansions� such as oversampled A�D conversion and oversampled FBs�
Loosely speaking� the range space R&and thus also the �xed noise component ��R&
becomes �smaller� for increasing oversampling factor K ! N�M � This explains why
more oversampling tends to result in better noise reduction�
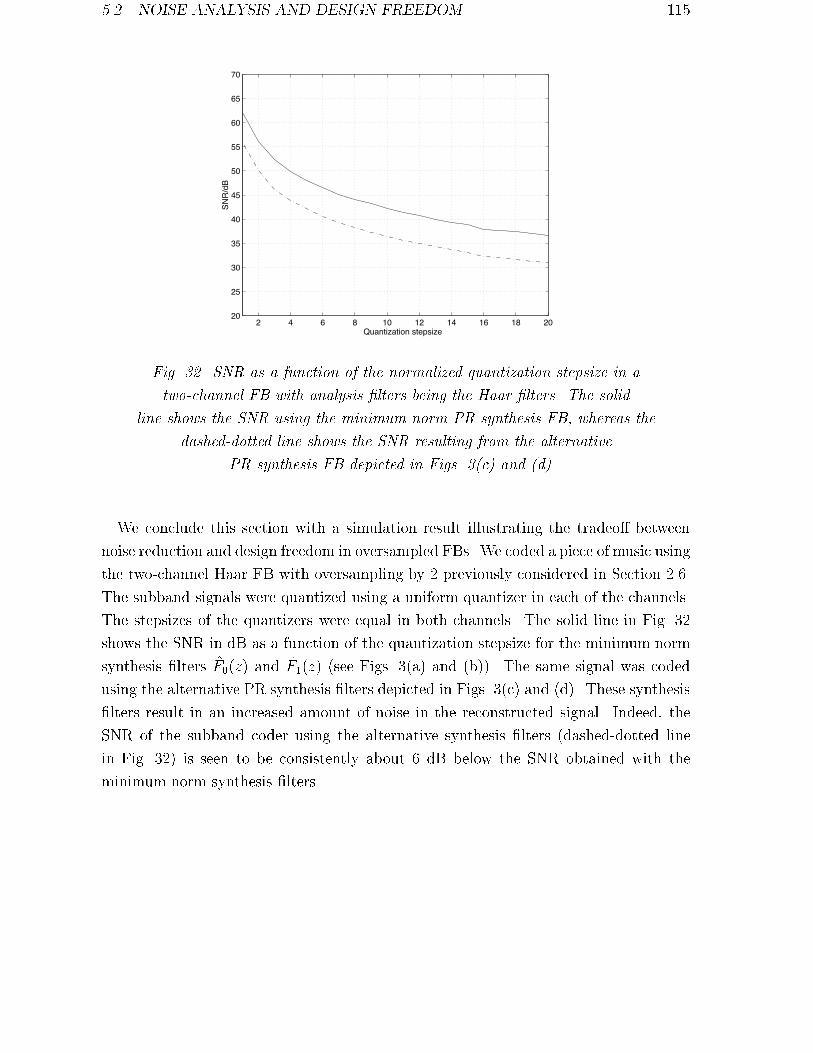
���� NOISE ANALYSIS AND DESIGN FREEDOM �
2 4 6 8 10 12 14 16 18 2020
25
30
35
40
45
50
55
60
65
70
Quantization stepsize
SN
R/d
B
Fig� ��� SNR as a function of the normalized quantization stepsize in a
two�channel FB with analysis �lters being the Haar �lters� The solid
line shows the SNR using the minimum norm PR synthesis FB� whereas the
dashed�dotted line shows the SNR resulting from the alternative
PR synthesis FB depicted in Figs� �c and d�
We conclude this section with a simulation result illustrating the tradeo� between
noise reduction and design freedom in oversampled FBs� We coded a piece of music using
the two�channel Haar FB with oversampling by � previously considered in Section ����
The subband signals were quantized using a uniform quantizer in each of the channels�
The stepsizes of the quantizers were equal in both channels� The solid line in Fig� ��
shows the SNR in dB as a function of the quantization stepsize for the minimum norm
synthesis �lters F��z� and F��z� �see Figs� ��a� and �b��� The same signal was coded
using the alternative PR synthesis �lters depicted in Figs� ��c� and �d�� These synthesis
�lters result in an increased amount of noise in the reconstructed signal� Indeed� the
SNR of the subband coder using the alternative synthesis �lters �dashed�dotted line
in Fig� ��� is seen to be consistently about � dB below the SNR obtained with the
minimum norm synthesis �lters�

Chapter �
Oversampled Predictive Subband
Coders
In this chapter we introduce oversampled predictive subband coders� These coders will
be classi�ed as noise predictive �noise shaping� subband coders and signal predictive
subband coders� Both types of subband coders can be viewed as extensions of over�
sampled predictive A�D converters ���� �� ��� to oversampled FBs� Oversampling in a
FB introduces redundancy in the subband signals and therefore allows to reduce quan�
tization noise� In Chapter �� we proved a �K�type behavior �K is the oversampling
factor� of the reconstruction error variance in oversampled paraunitary FBs� This be�
havior can further be improved by using predictive techniques such as noise shaping
�� � �see Subsec� ����� and linear prediction �see Subsec� ������� In this sense� oversam�
pled FBs allow to trade sample rate and consequently coding rate �in an information
theoretic sense� for quantizer accuracy� Oversampled predictive subband coders are
therefore well suited for subband coding applications where for technological or other
reasons quantizers with low accuracy �even single�bit� have to be used� In this case�
oversampling in the FB and noise shaping or linear prediction improve the e�ective
resolution of the subband coder� Using low resolution quantizers in the digital domain
increases circuit speed and allows for lower circuit complexity� One�bit codewords� for
example� eliminate the need for word�framing�
The subband coders proposed in this chapter exploit both the intrachannel and the
interchannel redundancy� Exploiting the interchannel redundancy is important since
the channel �lters� transfer functions are always overlapping and therefore the channel
signals are correlated�
We shall now outline the organization of this chapter� In Sec� �� we review oversam�
pled noise predictive and signal predictive A�D converters� This discussion serves as
a basis for Section ��� which introduces oversampled predictive subband coders� Both
noise predictive and signal predictive subband coders are discussed� We present cod�
�

CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
ing examples that shall help to develop a quantitative feeling for the tradeo� between
quantizer accuracy and oversampling factor�
��� Oversampled Predictive A D Converters
In this section we shall review predictive techniques for oversampled A�D conversion
���� Our presentation essentially follows ����� Based on the interpretation of oversam�
pled A�D conversion as a frame expansion �see Subsec� ����� we provide a new signal
space interpretation of the principle underlying noise shaping A�D converters ����
Oversampled A�D converters ��� avoid many of the di�culties encountered with con�
ventional methods for A�D and D�A conversion and have therefore found widespread
application� In oversampling converters� simple and relatively high�tolerance analog
components can be used� However� they require fast and complex digital signal process�
ing stages� Usually� the analog input is converted into a simple digital code �single�bit
words in general� at a frequency much higher than the Nyquist rate� In essence� over�
sampled A�D converters allow to trade resolution in time �sampling rate� for resolution
in amplitude in such a way that imprecise analog circuits may be used� They take
advantage of the fact that �ne�line VLSI is better suited for fast digital circuits than for
precise analog circuits� Because the sampling rate of oversampled A�D converters has
to be several orders of magnitude higher than the Nyquist rate� oversampling methods
are best suited for relatively low�frequency signals� �We note� however� that several in�
teresting approaches for high�speed A�D conversion based on an array of slower speed
A�D converters have been proposed recently ���� ���� So far� oversampled A�D
converters have found use in applications such as digital audio� digital telephony� and
instrumentation� Future applications include video and radar systems�
In the following we shall discuss two types of oversampled A�D converters� namely
noise shaping converters also known as sigma�delta converters �see Subsec� ���� and
signal predictive converters �see Subsec� ������
����� Noise Predictive �Noise Shaping� Coders
This subsection discusses oversampled noise predictive coders also known as sigma�delta
converters or noise shaping converters� The overall coder is modeled as a digital system
by moving the A�D converter�s sampling gate �i�e� the A�D converter without quan�
tizer� ahead of the coder� In our analysis we assume that the A�D converter�s sampling
gate is ideal� i�e�� it provides exact samples of the analog signal without introducing any
distortions�
Principle� Fig� �� shows a general noise shaping coder with X�z� denoting the
z�transform of the input signal �the sampled version of the analog signal x�t��� Xq�z�

���� OVERSAMPLED PREDICTIVE A�D CONVERTERS
�G�z�
QX�z�
Q�z�
Xq�z�
Fig� ��� General noise�shaping coder� The box labeled Q denotes the quantizer�
denoting the z�transform of the output signal and the noise shaping �lter
G�z� ! �LX
k��
g�k�z�k�
Here L denotes the order of the noise�shaping coder and the �lter coe�cients are as�
sumed real�valued� g�k� � IR� Note that the �lter � G�z� !PL
k�� g�k�z�k has to be
strictly causal since it operates in a feedback loop� The quantizer is modeled as an
additive noise source� the quantization noise q�n� is assumed to be a zero mean� WSS
process�
Straightforward calculations reveal that q�n� �cf� Fig� ��� is given by
q�n� !LX
k��
g�k� q�n� k�� Q�z� ! ��G�z��Q�z��
where Q�z� is the z�transform of the quantization noise sequence q�n�� The goal of
an optimum noise shaping system design is to choose the �lter coe�cients g�n� such
that q�n� optimally estimates or predicts the inband component of the quantization
noise sample q�n�� in the sense that the inband component of q�n� � q�n�� i�e�� the
component of q�n� � q�n� that lies in R� is minimal �note that the corresponding out�
of�band component� i�e�� the component in R� will be removed by the reconstruction
lowpass �lter in the decoder �cf� Fig� ����� The signal x�n� � q�n� presented to the
quantizer thus is the signal sample x�n� minus the estimate q�n� of the next sample of
the inband noise component� The noise shaping system therefore performs a prediction
of the inband component of the next noise sample by forming a linear combination of
the L past noise samples q�n��� q�n���� ���� q�n�L�� In this sense noise shaping coders
can be interpreted as noise predictive coders�
It is easily seen from Fig� �� that the coder�s output signal is given by
xq�n� ! x�n� " q�n�� q�n�

�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
��s �s��� ����
Fig� ��� Spectrum of oversampled analog signal�
or equivalently
Xq�z� ! X�z� "Q�z�G�z��
Note that x�n� is not a�ected by the noise�shaping system G�z� whereas q�n� is formally
passed through G�z�� For given noise statistics� the �lter coe�cients g�k� are chosen
such that the inband noise power� i�e�� the noise that falls into the signal band� is
minimized �see Fig� � �b��� In this sense� noise�shaping coders improve the resolution
of the A�D converter but leave the A�D converter�s dynamic range unchanged �this is
fundamentally di�erent from the signal predictive coder discussed in Subsection ������
Since the inband noise power is reduced relative to the quantization noise power of the
A�D converter� it is possible to increase the quantization intervals and thereby reduce
the overall converter complexity�
In principle� the optimal noise shaping �lter G�z� would be the ideal highpass �lter
with passband �s � j�j � ��� where �s !��K
denotes the bandwidth of the sampled
signal� However� the ideal highpass �lter is of course not realizable� furthermore� it
would lead to a noncausal �G�z� and can therefore not operate in a feedback loop�
Optimum Noise Shaping System� We shall next describe two approaches for ob�
taining the �optimum� noise shaping �lter G�z� ����� The �rst approach minimizes the
reconstruction error variance ��e � i�e�� the variance of e�n� ! xq�n�� x�n� corresponding
to
E�z� ! Xq�z��X�z� ! Q�z�G�z��
by choosing the coe�cients g�k� such that ���e�g�k�
! � for k ! � �� ���� L� In this case�
of course� the coe�cients of the noise shaping �lter depend on the statistics of the
quantization noise and on the oversampling factor� In the following we assume that the
correlation function of the quantization noise� Cq�k� ! Efq�n�q��n� k�g� is known� Thecorresponding power spectral density function is given by Sq�z� !
P�k���Cq�k�z
�k�
Assuming that the analog signal x�t� is band�limited to jf j � B�� i�e�� X�f� !R��� x�t� e�j��ft ! � for jf j � B�� and that the coder performs oversampling at a
rate Fs � �B�� the �lter G�z� has to be chosen such that the quantization noise in the
signal band ��s � � � �s with �s ! B�
Fs! �
�Kis attenuated as much as possible �see
Fig� ���� The remaining out�of�band noise in the frequency region �s � j�j � �� will
be removed by a lowpass �lter in the decoder�

���� OVERSAMPLED PREDICTIVE A�D CONVERTERS �
The power spectral density function of the reconstruction error E�z� ! Q�z�G�z� is
given by Se�z� ! G�z� #G�z�Sq�z� ����� The reconstruction error variance ��e is obtained
as
��e !Z ���
����Se�e
j���� d� !Z ���
����jG�ej����j� Sq�ej���� d�� ����
Since in the decoder the output of the coder is lowpass �ltered with cuto� frequency �s�
the integration in ���� can be restricted to the interval j�j � �s and we get the �nal
expression for the reconstruction error variance as
��e !Z �s
��sjG�ej����j� Sq�ej���� d�� �����
With G�ej���� ! � PLk�� g�k�e
�j���k� it follows after straightforward manipulations
that
��e ! )� � �LX
k��
g�k�)k "LX
k��
g�k�LXl��
g�l�)k�l� �����
where
)k !Z �s
��sSq�e
j���� cos����k� d��
In particular� )� !R �s��s Sq�e
j���� d�� De�ning the L � L matrix � with elements
���m�n ! �m�n
���m ! � �� ���� L� n ! � �� ���� L�� the L � vector h with elements
�h�m ! �m��
�m ! � �� ���� L� and the L � vector g containing the coe�cients of the
noise shaping �lter according to �g�m ! g�m�� the reconstruction error variance ��e can
be rewritten as
��e ! )��� �gTh " gT�g�� �����
The optimum noise shaping �lter G�z� of order L is obtained by setting ���e�g�k�
! � for
k ! � �� ���� L or equivalently ���e�g
! �L� where �L denotes the L � zero vector� Using��ggTh ! h and �
�ggT�g ! ��g ����� it follows that the coe�cients of the optimum
noise shaping �lter have to satisfy ����
�gopt ! h or equivalently gopt ! ���h� �����
The matrix � has T�oplitz structure ���� ��� and can therefore be inverted e�ciently
using the Levison�Durbin recursion ��� ��� ���� From ����� it is clear that the
coe�cients of the optimum noise shaping �lter gopt depend on the oversampling factor
K ! ���s
and on the noise statistics Cq�k�� Therefore� the resulting coder is not robust
with respect to changes in the noise statistics and the oversampling factor�
Optimum noise shaping system � Alternative approach� We shall next present
an alternative approach ���� for the calculation of an �optimum� noise shaping �lter�
This approach is based on a power series expansion of the reconstruction error variance
��e � The L noise shaping �lter coe�cients g�n� are chosen such that the �rst L terms of
this series expansion vanish� independently of the noise statistics� Expanding the cosine

�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
term cos����k� in )k !R �s��s Sq�e
j���� cos����k� d� as a power series with respect to ��
we obtain the following expression of )k as a power series in �s ! B�Fs�
)k)�
!�Xl��
���l��l�$
k�l ����s��l *l with *l !
)�
Z �s
��sSq�e
j����
��
�s
��l
d��
Consequently the L � vector h de�ned further above can be expanded as
h !�Xl��
h�l� *l ��ls �
where �h�l��m ! ���l �l��
m�l�����l� and the L � L matrix � can be expanded as
� !�Xl��
��l�*l��ls with ���l��i�j !
���l��l�$
�i� j��l�����l �i� j ! � �� ���� L�
Inserting this power series expansions of h and of � into ����� we get a power series
expansion of the normalized noise variance ��e��
as
��e)�
!�Xl��
+l*l ��ls � �����
with
+l ! ��l�� �gTh�l� " gT��l�g�
where we have used *� ! � The power series expansion method now selects the �lter
coe�cients g�k� �k ! � �� ���� L� such that +l ! � for l ! �� � ���� L� � The solution of
the resulting system of equations is given by ����
g�k� ! ���k��L
k
�k ! � �� ���� L�
from which it follows that the corresponding noise shaping �lter is given by
G�z� ! �� z���L�
The lowest�order nonvanishing term in ����� is given by +L*L��Ls � For large oversam�
pling factors K ! ���s
� i�e�� small �s� higher powers of �s can be neglected in the series
expansion ������ which implies that the decay of the reconstruction error variance ��e is
essentially proportional to ��Ls !�
��K
��L� �We note that +L does not depend on the
oversampling factor K�� Approximating the inband noise power by the lowest�order
nonvanishing term +L*L��Ls � we get
��e )�+L*L��Ls ! )�+L*L
�K
��L� �����
Although the noise shaping �lterG�z� is independent of the quantization noise statistics�
the performance of the coder of course depends on the quantization noise statistics�

���� OVERSAMPLED PREDICTIVE A�D CONVERTERS ��
���
��
power spectral density of noiseG�ej����
�
Fig� ��� Typical noise shaping �lter�
Assuming for simplicity white quantization noise with power spectral density ��q � we
get *L !���q��
�s�L�
and consequently
��e +L
���L��q�L"
K�L��
Therefore� in the white noise case the reconstruction error variance is inversely propor�
tional to K�L�� Setting L ! �� we reobtain the �K�behavior of the reconstruction
error variance in a K�times oversampled A�D converter without noise shaping �see Sub�
section ������ Recently it has been shown � � using a vector quantization approach
that the reconstruction error in an L�th order noise shaping coder cannot decrease faster
than �K�L�� � In order to achieve this performance� �consistent� reconstruction of the
quantized values has to be used ���� � ���
Frame�theoretic interpretation� We conclude this subsection with a frame�
theoretic interpretation of noise shaping which will turn out to be crucial for the de�
velopment of the results in Subsec� ����� In a noise shaping coder� the quantization
noise is �shaped� in such a way that the noise in the signal band is reduced� i�e�� the
noise shaping coder shifts the noise to the high frequencies which are then discarded by
the lowpass reconstruction �lter� Fig� �� shows the transfer function of a typical noise
shaping �lter along with the power spectral density of the �white� quantization noise
and the signal spectrum�
Since the signal band � ��K
� � � ��K
corresponds to the range space R of the
sampling operator T �see Subsec� ������ the operation of the noise shaping coder can
also be interpreted as moving the quantization noise to the orthogonal complement R
of the sampling operator�s range space� Reconstruction with the dual frame� i�e�� low�
pass �ltering� then performs an orthogonal projection onto the range space R which
discards all the components in the complement space R� In the light of these expla�
nations� it appears that the ideal highpass �lter with passband ��K
� j�j � �� is
the optimum noise shaping �lter since it projects the noise entirely onto R� hence�
after the reconstruction lowpass �lter �orthogonal projection onto R�� no noise would
be left� However� as already mentioned the ideal highpass �lter is not realizable and
would furthermore lead to a noncausal feedback loop system�
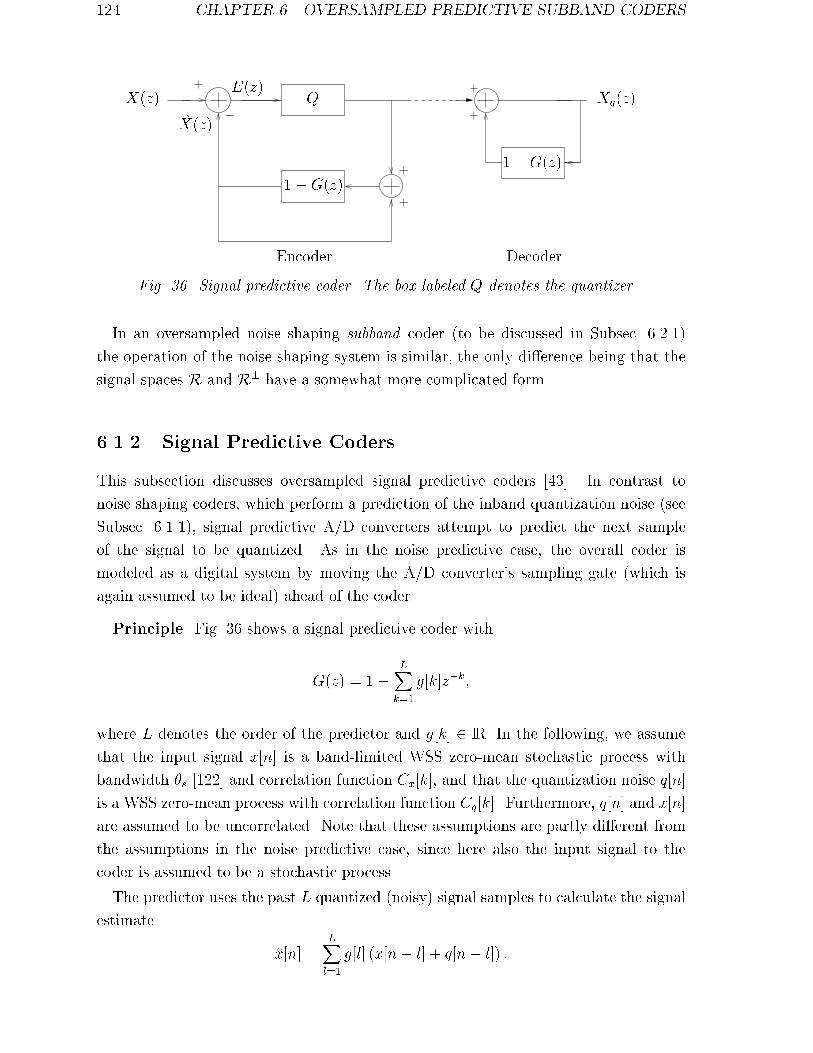
�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
�G�z�
QX�z�
X�z�
E�z�Xq�z�
�G�z�
Encoder Decoder
Fig� ��� Signal predictive coder� The box labeled Q denotes the quantizer�
In an oversampled noise shaping subband coder �to be discussed in Subsec� �����
the operation of the noise shaping system is similar� the only di�erence being that the
signal spaces R and R have a somewhat more complicated form�
����� Signal Predictive Coders
This subsection discusses oversampled signal predictive coders ����� In contrast to
noise shaping coders� which perform a prediction of the inband quantization noise �see
Subsec� ����� signal predictive A�D converters attempt to predict the next sample
of the signal to be quantized� As in the noise predictive case� the overall coder is
modeled as a digital system by moving the A�D converter�s sampling gate �which is
again assumed to be ideal� ahead of the coder�
Principle� Fig� �� shows a signal predictive coder with
G�z� ! �LX
k��
g�k�z�k�
where L denotes the order of the predictor and g�k� � IR� In the following� we assume
that the input signal x�n� is a band�limited WSS zero�mean stochastic process with
bandwidth �s ���� and correlation function Cx�k�� and that the quantization noise q�n�
is a WSS zero�mean process with correlation function Cq�k�� Furthermore� q�n� and x�n�
are assumed to be uncorrelated� Note that these assumptions are partly di�erent from
the assumptions in the noise predictive case� since here also the input signal to the
coder is assumed to be a stochastic process�
The predictor uses the past L quantized �noisy� signal samples to calculate the signal
estimate
x�n� !LXl��
g�l� �x�n� l� " q�n� l�� �

���� OVERSAMPLED PREDICTIVE A�D CONVERTERS ��
The input to the quantizer is the prediction error
e�n� ! x�n�� x�n� ! x�n��LXl��
g�l��x�n� l� " q�n� l���
or equivalently
E�z� ! G�z�X�z�� ��G�z��Q�z��
It is readily veri�ed that the coder output is given by Xq�z� ! X�z� " Q�z�� Thus�
the overall reconstruction error Xq�z��X�z� ! Q�z� is equal to the quantization error
Q�z�� In this sense� a predictive coder does not give improved accuracy� However� by
choosing the prediction error �lter G�z� such that the prediction error e�n�� i�e�� the
input signal to the quantizer� is reduced� signal prediction provides a reduced dynamic
range over which the quantizer must operate� This allows to improve the resolution of
the quantizer for a �xed number of quantization intervals�
An oversampled signal predictive coder exploits two types of redundancies� which
shall be called natural redundancy and synthetic redundancy hereafter� The natural
redundancy �correlation� is the redundancy that is inherent in the input signal whenever
the input signal has a non�at power spectral density function� The synthetic redundancy
is introduced by oversampling the analog signal� i�e�� by expanding the input signal into a
redundant signal set which in our case consists of time�shifted versions of sinc functions
�see Subsec� ����� It is therefore clear that for increasing oversampling factor the
prediction will become more accurate� since there is less variation in the signal�s sample
values or equivalently more synthetic redundancy�
The estimate x�n� !LPl��
g�l��x�n � l� " q�n� l�� of the signal sample x�n� is based on
quantized values of the past �noisy prediction�� In the case of high�resolution quan�
tization� the e�ect of quantization noise can be neglected and x�n� LPl��
g�l�x�n � l��
However� since we are interested in the speci�c case of low�resolution quantization� this
assumption will not be justi�ed in general�
Optimum prediction system� We shall next describe two approaches for the
calculation of an �optimum� prediction �lter �G�z� ����� Both approaches are based
on the following expression for the power spectral density function of the prediction
error
Se�z� ! Sx�z�G�z� #G�z� " Sq�z���G�z���� #G�z���
Here we used the assumption that q�n� and x�n� are uncorrelated� The prediction error
variance ��e !R ������� Se�e
j���� d� is consequently given by
��e ! )� � �LX
k��
g�k�)k "LX
k��
g�k�LXl��
g�l��)k�l " ,k�l��

�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
where )k !R �s��s Sx�e
j���� cos����k� d� and ,k !R ������� Sq�e
j���� cos����k� d�� Note
that the integration in )k ranges only over the interval j�j � �s� since x�n� is band�
limited with bandwidth �s� De�ning the L � L matrix � with elements ���m�n !�m�n�m�n
���m ! � �� ���� L� n ! � �� ���� L�� the L � vector h with elements �h�m !
�m��
�m ! � �� ���� L�� and the L � vector g containing the coe�cients of the prediction
�lter as �g�m ! g�m�� the prediction error variance can be rewritten as
��e ! )��� �gTh " gT�g�� ��� �
This is formally equivalent to ������ the only di�erence from the noise predictive case
being the de�nition of the matrix �� Note that � is still a T�oplitz matrix�
The following derivations closely parallel those presented in the noise predictive case
�see Subsec� ����� The �rst approach minimizes the prediction error variance by
choosing the coe�cients g�k� such that ���e�g�k�
! � for k ! � �� ���� L� The coe�cients of
the optimum prediction �lter �G�z� are given by
gopt ! ���h�
Due to the T�oplitz structure of �� the coe�cients gopt�k� can be calculated using the
Levinson�Durbin recursion ����
The second approach for the calculation of an �optimum� predictor is a power series
expansion method analogous to that in Subsec� ���� It assumes that the quantization
noise can be neglected ����� i�e�� ,k ! � for k � ZZ� As explained above� this is an unreal�
istic assumption in the case of low�resolution quantization� The results of Subsec� ����
i�e�� the derivations of the power series expansion method based optimum noise shaping
�lter� readily carry over to the signal predictive case by simply replacing Sq�ej���� in
Subsec� ��� with Sx�ej����� It follows that the resulting optimum prediction error �lter
of order L is given by G�z� ! �� z���L� Even the approximation ����� remains valid
as an approximation for the prediction error variance�
Remarks� An important special case of signal predictive coders is delta�modulation�
which is obtained by setting L ! and using a one�bit quantizer� The use of one�bit
words eliminates the need for word�framing� which makes the corresponding coders
attractive for numerous practical applications� A detailed analysis of delta�modulators
is provided in ����
We conclude this section with some remarks that will facilitate the transition from
oversampled predictive A�D converters to the oversampled predictive subband coders
discussed in Section ���� In an oversampled predictive A�D converter� �synthetic� redun�
dancy is introduced by oversampling the analog signal� As explained in Subsec� ����
oversampled A�D conversion can be viewed as a redundant signal expansion� This re�
dundancy in the signal samples can then be exploited to perform a quantization noise

���� OVERSAMPLED PREDICTIVE SUBBAND CODERS ��
reduction by using either noise prediction or signal prediction� Noise shaping coders
exploit the redundancy by moving some of the quantization noise to a frequency band
which is then discarded by the reconstruction �lter� Signal predictive coders exploit
the redundancy by subtracting from the quantizer input an accurate estimate of the
current sample to be quantized�
��� Oversampled Predictive Subband Coders
In this section we shall introduce oversampled predictive subband coders� Such coders
are useful for subband coding applications where low�resolution quantizers �even single�
bit� have to be used� In this case� oversampling and noise shaping or prediction improve
the e�ective resolution of the subband coder considerably� The use of low�resolution
quantizers in subband coding applications o�ers several advantages such as increased
circuit speed and simple hardware architectures�
The coders discussed in this section are classi�ed as noise predictive �noise shaping�
subband coders �Subsec� ����� and signal predictive subband coders �Subsec� �������
The proposed coders are capable of exploiting both the intrachannel and the interchan�
nel redundancy in the subband signals� Since the channel �lters in a practical subband
coder are nonideal� i�e�� their transfer functions are overlapping� it is evident that there
will be correlations between the di�erent channels� So far� signal predictive subband
coders have been restricted to intrachannel prediction and critical sampling �� � ���
Only recently� it has been demonstrated for the special case of a two�channel Haar FB
with critical sampling that using information from the high�frequency band to perform
prediction in the low�frequency band leads to a subband coder that is asymptotically
rate�distortion optimal �����
We show that the calculation of the optimum �noise or signal� prediction system
can be reduced to the inversion of a matrix that has block T�oplitz structure� An
e�cient algorithm for this inversion is the multi�channel Levinson�Durbin recursion
��� ��� reviewed in Appendix B� We provide simulation results demonstrating the
advantage of oversampled subband coders for low�resolution quantization applications�
These simulation results serve to develop a quantitative feeling for the tradeo� between
oversampling factor and quantizer accuracy� furthermore� they will provide insight into
the rate�distortion properties of oversampled predictive subband coders�
����� Noise Predictive �Noise Shaping� Subband Coders
In Subsec� ��� we argued that oversampled A�D converters with noise shaping ex�
ploit the redundancy inherent in the signal samples by pushing the quantization noise
to the orthogonal complement of the sampling operator�s range space� The fact that
� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
oversampled FBs correspond to redundant signal expansions again suggests the appli�
cation of noise shaping� Classical noise feedback coding �single channel case� has found
widespread use� The noise shaping subband coders introduced here combine the advan�
tages of subband coding with those of noise or error feedback coding� The noise shaping
system in an oversampled FB aims at pushing the quantization noise to the orthogonal
complement R of the analysis �lter bank�s range space R�
������ Principle
In a FB the analysis operator is represented by the analysis polyphase matrix E�z�
�see Subsec� ������ We propose a noise shaping system that is cradled between the
analysis FB E�z� and the synthesis FB R�z� and represented by the N � N transfer
matrixG�z� �see Fig� ���� The quantizer is modeled as a WSS zero�mean vector�valued
noise source q�m� with autocorrelation matrix Cq�k� ! Efq�m�qH �m � k�g and power
spectral matrix Sq�z� !P�
k���Cq�k� z�k� The quantization noise q�z� is fed back
through the noise shaping system IN �G�z� to yield the quantization noise estimate
q�z� ! �IN � G�z��q�z�� which is then subtracted from the subband signal vector
v�z� ! E�z�x�z�� Assuming a PR FB� i�e�� R�z�E�z� ! IM � the reconstructed signal is
obtained as
xq�z� ! R�z� �E�z�x�z� "G�z�q�z�� ! x�z� "R�z�G�z�q�z��
It follows that the reconstruction error equals q�z� �ltered by G�z� and then by the
synthesis FB R�z��
e�z��! xq�z�� x�z� ! R�z�G�z�q�z� � ����
Therefore� the M � M power spectral density matrix of the reconstruction error is
given by
Se�z� ! R�z�G�z�Sq�z� #G�z� #R�z��
Consequently� the reconstruction error variance is
��e !
M
Z ���
����TrnR�ej����G�ej����Sq�e
j����GH�ej����RH�ej����od�� �����
Without further constraints� the noise could be completely removed using the system
G�z� ! IN � E�z�R�z�� ����
Indeed� inserting ���� in ���� it follows with R�z�E�z� ! IM that e�z� � o� In
the case of reconstruction with the dual frame� i�e�� with the para�pseudo�inverse R�z��
the ideal noise shaper would therefore be the orthogonal projection operator on R
given by P�z� ! IN � E�z� R�z� �see Subsec� ������� Thus� the ideal noise shaper

���� OVERSAMPLED PREDICTIVE SUBBAND CODERS �
E�z� Qx�z� xq�z�
IN �G�z�
q�z�
R�z�
v�z�
Fig� ��� Oversampled subband coder with noise shaping� The box labeled Q denotes the
quantizer�
projects the noise onto the orthogonal complement R of the analysis FB�s range space
R� The projected noise is then suppressed by the minimum norm synthesis FB R�z��
which performs an orthogonal projection onto the range space of the analysis FB �see
Subsec� ������� This is similar to the case of oversampled A�D conversion where the
theoretically optimal noise shaping �lter was seen to be the ideal highpass �lter with
passband �s � j�j � ��� Unfortunately� the ideal system in ���� is inadmissible
since it is not causal and can therefore not operate in a feedback loop� Hence� we
hereafter constrain the noise shaping system to be a causal FIR system of the form
G�z� ! IN �LX
k��
Gk z�k � �����
resulting in a strictly causal feedback loop system
IN �G�z� !LX
k��
Gk z�k�
Here L denotes the order of the noise shaping system� The quantization noise estimate
now becomes q�n� !PL
l��Glq�n�l�� In the following we shall assume that the synthesis
FB is potentially an IIR FB� i�e��
R�z� !�X
k���Fkz
�k with �Fk�i�j ! fj�kM " i�� �����
Furthermore� the synthesis �lters are assumed to be real�valued� which implies that the
matrices Fk are real�valued�
������ Optimal Noise Shaping System
We now derive the optimal noise shaping system� i�e�� the matrices Gk minimizing the
reconstruction error variance ��e in ������

�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
Inserting ����� and ����� in ������ it follows after straightforward manipulations
that
��e !
MTr
���
�Xk���
�Xk����
Cq�k� � k�FT
k�Fk
�LXl��
�Xk���
�Xk����
Cq�k� � k " l�GT
l FTk�Fk
�LXl��
�Xk���
�Xk����
Cq�k� � k � l�FT
k�FkGl
"LXl��
LXl���
�Xk���
�Xk����
Cq�k� � k " l� � l�GT
l�FTk�FkGl
�� � �����
We next derive the optimum noise shaping system for the case of white uncorrelated
quantization noise with equal noise variances in all channels� i�e�� Cq�k� ! ��qIN��k��
We shall then proceed to show that the optimum noise shaping system for arbitrary
quantization noise statistics can be obtained from the optimum noise shaping system
for white uncorrelated quantization noise by means of a simple transformation�
Specializing ����� to Cq�k� ! ��qIN��k�� we get
��e !��qM
Tr
��� �
LXl��
h�lG
Tl " �T
l Gl
i"
LXm��
GTm
LXl��
�m�lGl
�� �����
with the N � N matrices
�l !�X
s���FTs Fsl �����
which satisfy
�T�l ! �l�
Setting ���e�Gs
! � and using the matrix derivative rules �cf� ����� Section ����
�
�GsTr fAGT
s g ! A
�
�GsTr fATGsg ! A
�
�GsTr fGsAg ! AT
�
�GsTr fAGsG
Ts g ! ATGs "AGs
for s ! � �� ���� L� we obtain the linear system of equations��������
�� ��� ��� �� L����� �� ��� �� L������
������
���
�L�� �L�� ��� ��
��������
��������
G�
G�
���
GL
�������� !
��������
��
��
���
�L
�������� � �����

���� OVERSAMPLED PREDICTIVE SUBBAND CODERS �
or� more compactly�
LXl��
�i�lGl ! �i with i ! � �� ���� L� ��� �
This system of equations has block T�oplitz form and can therefore be solved e�ciently
using the multichannel Levinson recursion ��� summarized in Appendix B �the ma�
trices GTl and Cx�k� in Appendix B have to be replaced by Gl and ��k� respectively��
Inserting ��� � into ������ we get the minimum reconstruction error variance as
��e�min !��qM
Tr
��� �
LXl��
�Tl Gl�opt
�� ����
where Gl�opt denotes the solution of ����� or ��� ��
Paraunitary FB� For a paraunitary FB with normalized� real�valued analysis �lters
�hk�n� � IR and khkk ! �� we have R�z� ! �K
#E�z� and consequently Fl ! ET�l� This
implies
�l !
K�
�Xs���
EsETs�l ������
and furthermore Tr�� ! MK� The analysis polyphase coe�cient matrices are given by
�Es�i�j ! hi�sM � j� � IR� If we restrict the analysis �lters to be causal and of �nite
length Lh ! JM �with some J � IN�� we get Es ! � for s � � and s � J and hence
�l !�K�
PJs��EsE
Ts�l� From this expression� it can be seen that �l ! �N for jlj � J � In
particular� in the nondecimated case M ! we have Es ! � for s � � and s � J �
and hence �l !�K�
PJ��s�� EsE
Ts�l� Consequently� �l ! �N for jlj � J�� The maximum
possible order of the noise shaping system is determined by the rank of the block matrix
in ����� containing the matrices �l� With Tr�� ! MK� the minimum reconstruction
error variance in the paraunitary case is given by
��e�min !��qM
M
K� Tr
�LXl��
�Tl Gl�opt
��! ��e
���L��
� ��qM
Tr
�LXl��
�Tl Gl�opt
�� �����
where ��e���L��
!��qK
is the reconstruction error variance obtained without noise shaping
�cf� ������
Colored noise case� We now consider the calculation of the optimum noise shaping
system in the general case of nonwhite� correlated quantization noise� Assuming that
the noise power spectral matrix can be factored according to Sq�z� ! S���q �z�#S���q �z�
and inserting this factorization into ������ we obtain
��e !
M
Z ���
����TrnR�ej����G�ej����S���q �ej����S���
H
q �ej����GH�ej����RH�ej����od��
������

�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
which can be rewritten as
��e !
M
Z ���
����TrnR�ej����G��ej����G�H �ej����RH�ej����
od�� ������
with G��z� ! G�z�S���q �z�� Comparing with ������ we see that ��e is minimized ifG��z�
is the optimum noise shaping system for white uncorrelated noise with equal variances
��q ! in all channels �denoted G�opt�z� in what follows�� This system can be calculated
as explained above� The optimum noise shaping system Gopt�z� for possibly nonwhite�
correlated quantization noise with power spectral matrix Sq�z� is then given by
Gopt�z� ! G�opt�z�S
����q �z�� ������
Thus� the calculation of the optimum noise shaping system for arbitrary quantization
noise statistics has been reduced to the calculation of the optimum noise shaping system
for white uncorrelated quantization noise and a spectral factorization of the noise power
spectral density matrix�
������ An Example
We next provide a simple example in order to demonstrate the basic idea of noise shaping
in FBs and the importance of exploiting both the interchannel and the intrachannel
redundancy� Let us consider a simple paraunitary two�channel FB �i�e�� N ! �� with
M ! and� hence� oversampling factor K ! �� Fig� � shows the FB without noise
shaping� The analysis �lters are the Haar �lters H��z� ! �p�� " z��� and H��z� !
�p�� � z���� and the synthesis �lters �corresponding to R�z� ! R�z�� are F��z� !
��#H��z� and F��z� ! �
�#H��z�� We furthermore assume that the noise added to the
subband signals is white and uncorrelated with variance ��q in each channel� i�e�� Sq�z� !
��q I��
We shall �rst calculate the reconstruction error variance ��e for the case where no
noise shaping is employed� Using F��z� #F��z� " F��z� #F��z� !��in ������ we obtain
��e ! ��q
Z ���
����jF��e
j����j� d� "Z ���
����jF��e
j����j� d��!
��q�� ������
which is consistent with the �K result �����
We next calculate the optimum �rst�order noise shaping system� The analysis
polyphase coe�cient matrices are given by E� ! �p�� �T and E� ! �p
�� ��T �
With �see ������� �� !���E�E
T� "E�E
T� � !
��I� and
�� !
�E�E
T� !
��
� �
��

���� OVERSAMPLED PREDICTIVE SUBBAND CODERS ��
X�z� Xq�z�
H��z�
H��z�
F��z�
F��z�
q��z�
q��z�
Fig� � � Two�channel FB with oversampling by factor ��
and �l ! � for l � � it follows from ����� that the optimal noise shaping system of
order L ! is given by G�z� ! I� �G� z�� with
G��opt ! ���� �� ! ��� !
�
��
� �
�� �
The corresponding �minimum� error variance is obtained from ����� as
��e ! ��q
�
�� Trf�T
�G��optg�!
��q�� ������
Comparing ������ with ������� we can see that with the �rst�order noise shaping
coder the variance has been reduced by a factor of � as compared to the subband coder
without noise shaping� It is instructive to compare this result with the optimum noise
shaping system GD�z� of order L ! obtained under the constraint that G�z� is a
diagonal matrix� which means that the interchannel correlation �i�e�� the correlation
between the two channels� is not exploited� In this case� G� is replaced by the diagonal
matrix
GD� !
�� �
� �
�� �
Straightforward calculations reveal that
��e !��q���� " � " � " ����
Di�erentiating ��e with respect to the parameters and � and setting the derivatives
to zero we obtain ! ��� � ! ��
�and consequently
GD��opt !
�
�� �
� �
�� �
Note that the diagonal elements of GD��opt equal those of G��opt� The corresponding
reconstruction error variance is given by
��e !�
��q �
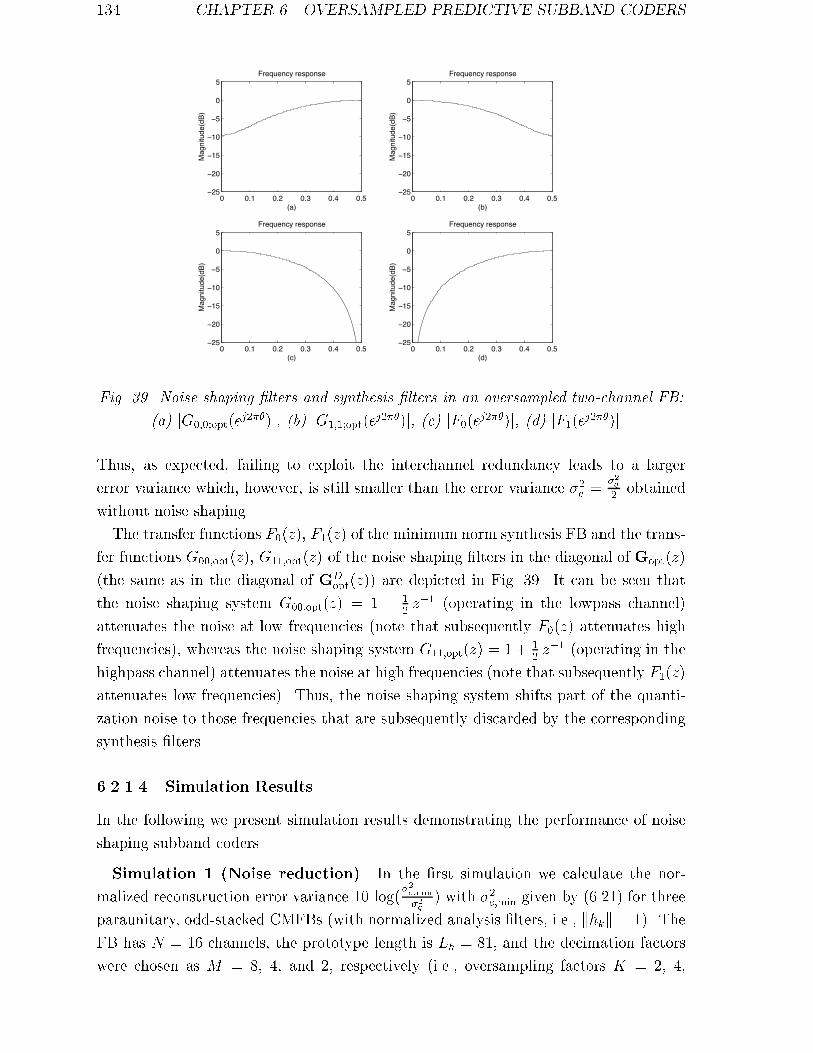
�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
0 0.1 0.2 0.3 0.4 0.5−25
−20
−15
−10
−5
0
5Frequency response
Mag
nitu
de(d
B)
(a)0 0.1 0.2 0.3 0.4 0.5
−25
−20
−15
−10
−5
0
5Frequency response
Mag
nitu
de(d
B)
(b)
0 0.1 0.2 0.3 0.4 0.5−25
−20
−15
−10
−5
0
5Frequency response
Mag
nitu
de(d
B)
(c)0 0.1 0.2 0.3 0.4 0.5
−25
−20
−15
−10
−5
0
5Frequency response
Mag
nitu
de(d
B)
(d)
Fig� ��� Noise shaping �lters and synthesis �lters in an oversampled two�channel FB�
a jG����opt�ej����j� b jG����opt�e
j����j� c jF��ej����j� d jF��e
j����j�
Thus� as expected� failing to exploit the interchannel redundancy leads to a larger
error variance which� however� is still smaller than the error variance ��e !��q�obtained
without noise shaping�
The transfer functions F��z�� F��z� of the minimum norm synthesis FB and the trans�
fer functions G���opt�z�� G���opt�z� of the noise shaping �lters in the diagonal of Gopt�z�
�the same as in the diagonal of GDopt�z�� are depicted in Fig� �� It can be seen that
the noise shaping system G���opt�z� ! � ��z�� �operating in the lowpass channel�
attenuates the noise at low frequencies �note that subsequently F��z� attenuates high
frequencies�� whereas the noise shaping system G���opt�z� ! " ��z�� �operating in the
highpass channel� attenuates the noise at high frequencies �note that subsequently F��z�
attenuates low frequencies�� Thus� the noise shaping system shifts part of the quanti�
zation noise to those frequencies that are subsequently discarded by the corresponding
synthesis �lters�
����� Simulation Results
In the following we present simulation results demonstrating the performance of noise
shaping subband coders�
Simulation � �Noise reduction�� In the �rst simulation we calculate the nor�
malized reconstruction error variance � log���e�min
��q� with ��e�min given by ����� for three
paraunitary� odd�stacked CMFBs �with normalized analysis �lters� i�e�� khkk ! �� The
FB has N ! � channels� the prototype length is Lh ! � and the decimation factors
were chosen as M ! � �� and �� respectively �i�e�� oversampling factors K ! �� ��

���� OVERSAMPLED PREDICTIVE SUBBAND CODERS ��
1 2 3 4 5 6 7 8 9 10-40
-35
-30
-25
-20
-15
-10
-5
0
System order L
Nor
mal
ized
err
or v
aria
nce
(dB
)
K=2
K=4
K=8
Fig� ��� Normalized reconstruction error variance � log���e�min���q� as a function of
the noise shaping system�s order L�
and � respectively�� The quantization noise was assumed to be white and uncorrelated
with variance ��q in each channel� Fig� �� shows the normalized reconstruction error
variance � log���e�min
��q� as a function of the noise shaping system�s order L for various
oversampling factors� We emphasize that the curves in Fig� �� have been calculated
using ����� and ����� and have not been measured on an implemented system� Yet�
Fig� �� gives an indication of the performance to be expected from an implemented noise
shaping subband coder� Note that for increasing L the reconstruction error variance
decreases up to a certain point� after which it remains constant� Fig� �� furthermore
shows that the maximum order of the noise shaping system �i�e�� the order after which
the reconstruction error variance does not decrease any more� depends on the over�
sampling factor� We observed that the rank of the block matrix in ����� decreases
with increasing oversampling factor� For noise shaping system order L ! �� we can see
from Fig� �� that doubling the oversampling factor results in a dB improvement in
the reconstruction error variance� This corresponds to an error�sample rate behavior of
�K�� For system order L ! � we even get a �dB improvement� which corresponds to
a �K��behavior�
Simulation � �Audio signal�� We next present simulation results that demonstrate
the performance of implemented noise shaping subband coders on an audio signal �tele�
phone ringing�� We used oversampled paraunitary odd�stacked CMFBs with N ! ��
channels and oversampling factorsK ! � �� �� � �� ��� ��� The length of the prototypes
was consistently Lh ! ���� Uniform quantizers with equal stepsizes in all subbands were
employed� The noise shaping system was calculated under the assumption of white un�

�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 10010
20
30
40
50
60
70
80
90
Quantization stepsize
SN
R /
dB
�a�
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 100−2
0
2
4
6
8
10
Quantization stepsize
SN
R−
diffe
renc
e / d
B
�b�
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
Quantization stepsize
bps
�c�
K=8, L=0
K=8, L=2
K=4, L=0
0 10 20 30 40 50 6010
20
30
40
50
60
70
80
90
bps
SN
R /
dB
�d�
Fig� ��� Noise shaping subband coder with oversampling factor � simulation results
for audio signal� a SNR as a function of quantization stepsize for di�erent noise
shaping system orders L� b SNR di�erences with respect to L ! � from a� c bps
as a function of quantization stepsize for di�erent system orders L� d distortion�rate
characteristic in comparison to alternative subband coders�
correlated quantization noise with equal variance in all channels��
For a noise�shaping subband coder with oversampling factor K ! � Fig� ��a� shows
the SNR ! kxk�kxq�xk� in dB as a function of the quantization stepsize for di�erent orders
of the noise shaping system� The curve labeled L ! � corresponds to a subband coder
without noise shaping� In Fig� ��b� the di�erences of the curves in Fig� ��a� with
respect to the L ! � curve are depicted� One can observe that for �ne quantization a
�It is well known from A�D conversion that the white noise assumption is not justi ed in the
oversampled case ����� However� estimating the quantization noise statistics is not possible in practice
since the quantizer is placed within a feedback loop ���� We therefore chose to stick to the white
noise assumption� We note that the performance loss of implemented noise shaping subband coders
as compared to the expected performance �see Simulation �� is mostly due to the fact that the white
noise assumption is not justi ed in the oversampled case�

���� OVERSAMPLED PREDICTIVE SUBBAND CODERS ��
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 10010
20
30
40
50
60
70
80
90
100
110
Quantization stepsize
SN
R /
dB
�a�
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 100−5
0
5
10
15
20
25
30
35
Quantization stepsize
SN
R−
diffe
renc
e / d
B
�b�
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 10050
100
150
200
250
300
350
400
450
500
Quantization stepsize
bps
�c�
K=64, L=0
K=64, L=2
K=32, L=0
K=32, L=2
0 50 100 150 200 250 300 350 400 450 50010
20
30
40
50
60
70
80
90
100
110
bps
SN
R /
dB
�d�
Fig� ��� Noise shaping subband coder with oversampling factor ��� simulation results
for audio signal� a SNR as a function of quantization stepsize for di�erent noise
shaping system orders L� b SNR di�erences with respect to L ! � from a� c bps
as a function of quantization stepsize for di�erent system orders L� d distortion�rate
characteristic in comparison to alternative subband coders�
noise shaping system of order L ! � leads to SNR improvements of up to ��dB� For
system order L ! �� the block matrix in ����� turned out to be singular up to working
precision� Therefore� the maximum order of the noise shaping coder was L ! ��
In our simulations we furthermore observed that noise shaping destroys long runs of
zeros and therefore the e�ective number of bits needed to encode the quantizer outputs
increases� Fig� ��c� shows the number of bits per sample �bps� as a function of the
quantization stepsize for di�erent orders of the noise shaping system� It can be seen
that the number of bps increases with increasing noise shaping system order� Finally�
we entropy�coded the quantizer outputs using a Hu�man coder� and performed an em�
�The Human coder operates on the outputs of all the channels jointly� i�e�� all subband signals are
collected and then jointly Human coded�
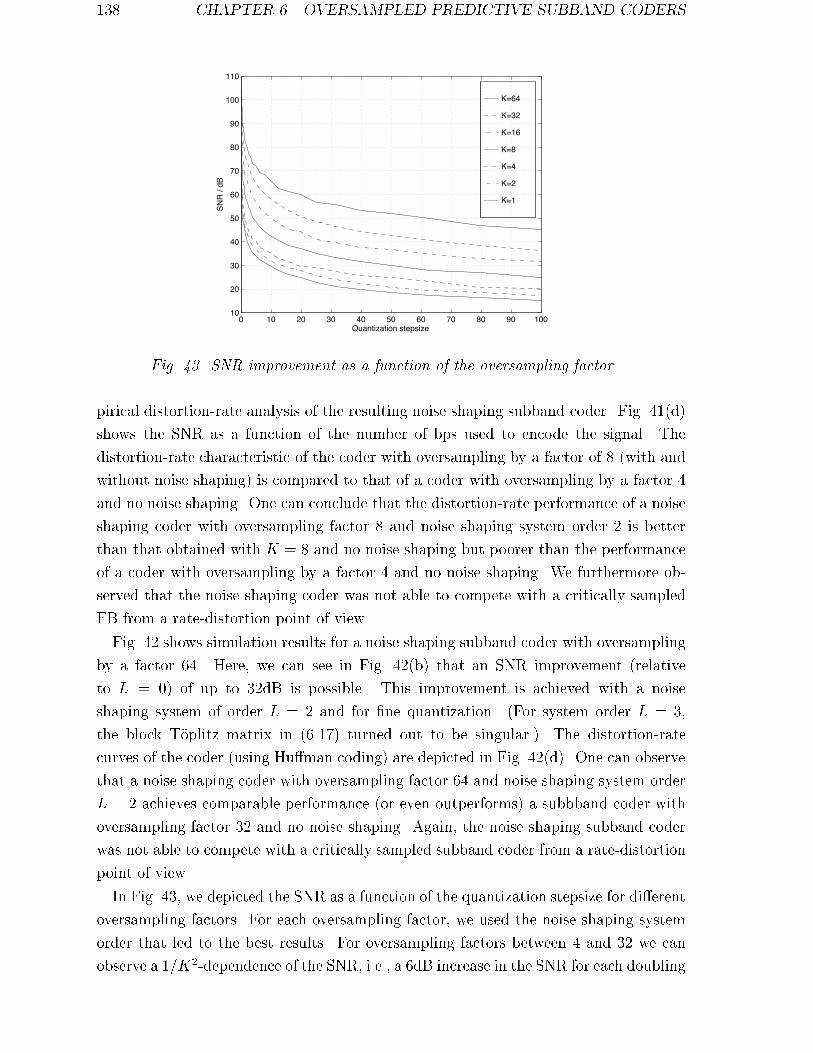
� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
K=64
K=32
K=16
K=8
K=4
K=2
K=1
0 10 20 30 40 50 60 70 80 90 10010
20
30
40
50
60
70
80
90
100
110
Quantization stepsize
SN
R /
dB
Fig� ��� SNR improvement as a function of the oversampling factor�
pirical distortion�rate analysis of the resulting noise shaping subband coder� Fig� ��d�
shows the SNR as a function of the number of bps used to encode the signal� The
distortion�rate characteristic of the coder with oversampling by a factor of �with and
without noise shaping� is compared to that of a coder with oversampling by a factor �
and no noise shaping� One can conclude that the distortion�rate performance of a noise
shaping coder with oversampling factor and noise shaping system order � is better
than that obtained with K ! and no noise shaping but poorer than the performance
of a coder with oversampling by a factor � and no noise shaping� We furthermore ob�
served that the noise shaping coder was not able to compete with a critically sampled
FB from a rate�distortion point of view�
Fig� �� shows simulation results for a noise shaping subband coder with oversampling
by a factor ��� Here� we can see in Fig� ���b� that an SNR improvement �relative
to L ! �� of up to ��dB is possible� This improvement is achieved with a noise
shaping system of order L ! � and for �ne quantization� �For system order L ! ��
the block T�oplitz matrix in ����� turned out to be singular�� The distortion�rate
curves of the coder �using Hu�man coding� are depicted in Fig� ���d�� One can observe
that a noise shaping coder with oversampling factor �� and noise shaping system order
L ! � achieves comparable performance �or even outperforms� a subbband coder with
oversampling factor �� and no noise shaping� Again� the noise shaping subband coder
was not able to compete with a critically sampled subband coder from a rate�distortion
point of view�
In Fig� ��� we depicted the SNR as a function of the quantization stepsize for di�erent
oversampling factors� For each oversampling factor� we used the noise shaping system
order that led to the best results� For oversampling factors between � and �� we can
observe a �K��dependence of the SNR� i�e�� a �dB increase in the SNR for each doubling
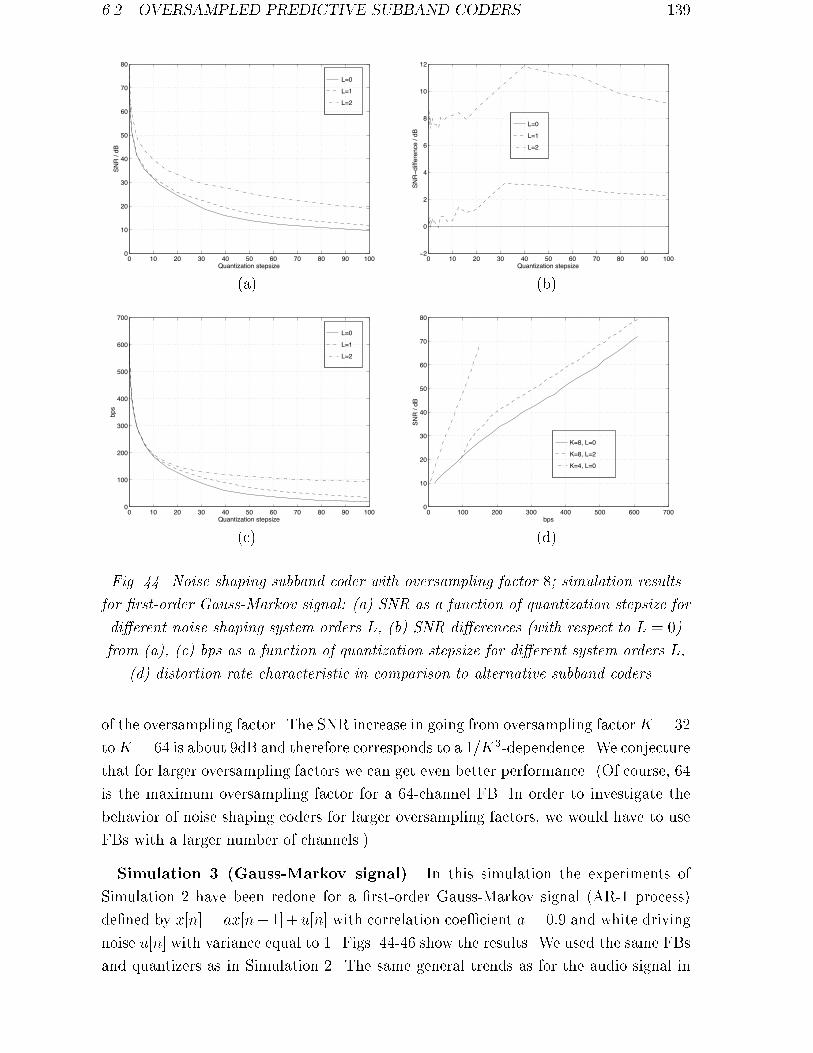
���� OVERSAMPLED PREDICTIVE SUBBAND CODERS �
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
70
80
Quantization stepsize
SN
R /
dB
�a�
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 100−2
0
2
4
6
8
10
12
Quantization stepsize
SN
R−
diffe
renc
e / d
B
�b�
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 1000
100
200
300
400
500
600
700
Quantization stepsize
bps
�c�
K=8, L=0
K=8, L=2
K=4, L=0
0 100 200 300 400 500 600 7000
10
20
30
40
50
60
70
80
bps
SN
R /
dB
�d�
Fig� ��� Noise shaping subband coder with oversampling factor � simulation results
for �rst�order Gauss�Markov signal� a SNR as a function of quantization stepsize for
di�erent noise shaping system orders L� b SNR di�erences with respect to L ! �
from a� c bps as a function of quantization stepsize for di�erent system orders L�
d distortion�rate characteristic in comparison to alternative subband coders�
of the oversampling factor� The SNR increase in going from oversampling factorK ! ��
toK ! �� is about dB and therefore corresponds to a �K��dependence� We conjecture
that for larger oversampling factors we can get even better performance� �Of course� ��
is the maximum oversampling factor for a ���channel FB� In order to investigate the
behavior of noise shaping coders for larger oversampling factors� we would have to use
FBs with a larger number of channels��
Simulation � �Gauss�Markov signal�� In this simulation the experiments of
Simulation � have been redone for a �rst�order Gauss�Markov signal �AR� process�
de�ned by x�n� ! ax�n� �"u�n� with correlation coe�cient a ! �� and white driving
noise u�n� with variance equal to � Figs� ����� show the results� We used the same FBs
and quantizers as in Simulation �� The same general trends as for the audio signal in

�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 10010
20
30
40
50
60
70
80
90
100
110
Quantization stepsize
SN
R /
dB
�a�
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 100−5
0
5
10
15
20
25
30
35
40
Quantization stepsize
SN
R−
diffe
renc
e / d
B
�b�
L=0
L=1
L=2
0 10 20 30 40 50 60 70 80 90 1000
0.5
1
1.5
2
2.5
3
3.5
4x 10
4
Quantization stepsize
bps
�c�
K=64, L=0
K=64, L=2
K=32, L=0
K=32, L=2
0 0.5 1 1.5 2 2.5 3 3.5 4
x 104
10
20
30
40
50
60
70
80
90
100
110
bps
SN
R /
dB
�d�
Fig� ��� Noise shaping subband coder with oversampling factor ��� simulation results
for �rst�order Gauss�Markov signal� a SNR as a function of quantization stepsize for
di�erent noise shaping system orders L� b SNR di�erences with respect to L ! �
from a� c bps as a function of quantization stepsize for di�erent system orders L�
d distortion�rate characteristic in comparison to alternative subband coders�
Simulation � can be observed� We therefore conjecture that the simulation results we
obtained for our two test signals give an indication of the performance of the proposed
coder in a real environment with rather arbitrary signals�
Simulation �Improving quantizer accuracy�� In order to demonstrate that
noise shaping in oversampled FBs is capable of improving the e�ective resolution of the
subband coder� we performed the following experiment� We coded an audio signal using
a paraunitary� ���channel� odd�stacked CMFB with critical sampling and quantizers
with �� quantization intervals in each subband� The resulting SNR was ��� �dB� Then�
we coded the same signal using a paraunitary� ���channel� odd�stacked CMFB with
oversampling factor and noise shaping system with order L ! �� the quantizers had
� quantization intervals� The resulting SNR was �����dB� Thus� we can see that the
same SNR could be achieved in the oversampled case with a quantization that had
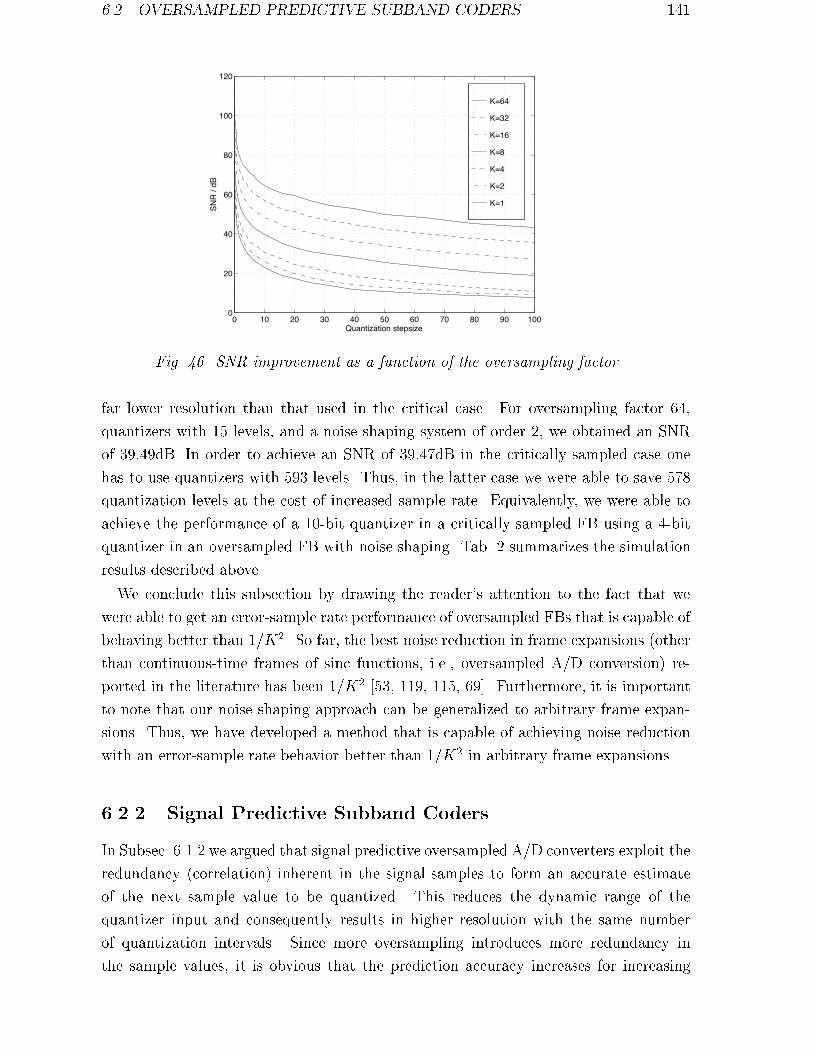
���� OVERSAMPLED PREDICTIVE SUBBAND CODERS �
K=64
K=32
K=16
K=8
K=4
K=2
K=1
0 10 20 30 40 50 60 70 80 90 1000
20
40
60
80
100
120
Quantization stepsize
SN
R /
dB
Fig� ��� SNR improvement as a function of the oversampling factor�
far lower resolution than that used in the critical case� For oversampling factor ���
quantizers with � levels� and a noise shaping system of order �� we obtained an SNR
of ���dB� In order to achieve an SNR of ����dB in the critically sampled case one
has to use quantizers with �� levels� Thus� in the latter case we were able to save ��
quantization levels at the cost of increased sample rate� Equivalently� we were able to
achieve the performance of a ��bit quantizer in a critically sampled FB using a ��bit
quantizer in an oversampled FB with noise shaping� Tab� � summarizes the simulation
results described above�
We conclude this subsection by drawing the reader�s attention to the fact that we
were able to get an error�sample rate performance of oversampled FBs that is capable of
behaving better than �K�� So far� the best noise reduction in frame expansions �other
than continuous�time frames of sinc functions� i�e�� oversampled A�D conversion� re�
ported in the literature has been �K� ���� � �� ��� Furthermore� it is important
to note that our noise shaping approach can be generalized to arbitrary frame expan�
sions� Thus� we have developed a method that is capable of achieving noise reduction
with an error�sample rate behavior better than �K� in arbitrary frame expansions�
����� Signal Predictive Subband Coders
In Subsec� ���� we argued that signal predictive oversampled A�D converters exploit the
redundancy �correlation� inherent in the signal samples to form an accurate estimate
of the next sample value to be quantized� This reduces the dynamic range of the
quantizer input and consequently results in higher resolution with the same number
of quantization intervals� Since more oversampling introduces more redundancy in
the sample values� it is obvious that the prediction accuracy increases for increasing

�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
K L SNR�dB NQ
� ��� � ��
� ����� �
� ���� ��
�� � ��� �
Table �� Improving the e�ective resolution of a subband coder by means of
oversampling and noise shaping� NQ denotes the number of quantization intervals
required�
oversampling factor� Extending this idea to subband coding� we shall next introduce
oversampled signal predictive FBs that make use of the redundancy introduced by the
oversampled analysis FB�
������ Principle
Fig� �� shows the structure of an oversampled signal predictive subband coder� A major
di�erence between a signal predictive A�D converter and a signal predictive subband
coder is the fact that in a subband coder we have to deal with a vector prediction
problem� Consequently� the prediction system is a multi�input multi�output �MIMO�
system� The prediction error system is an N �N MIMO system given by
G�z� ! IN �LXl��
Glz�l� ������
which results in a strictly causal feedback loop �prediction� system IN � G�z� !PLl��Glz
�l� The predictor uses the past L noisy subband signal vectors to estimate
the current subband signal vector�
v�m� !LXl��
Gl �v�m� l� " q�m� l�� �
This is a �noisy� vector prediction problem� For subband coding using high�resolution
quantizers� the e�ect of quantization noise can be neglected and hence v�m� PLl��Glv�m � l�� However� here we are primarily interested in low�resolution quan�
tization�
The prediction error e�m��! v�m�� v�m� forms the input to the quantizer� We have
e�z� ! v�z�� v�z� ! G�z�v�z�� �IN �G�z�� q�z�� ���� �
By choosing G�z� such that the dynamic range of the quantizer input vector e�m� !
v�m�� v�m� is reduced� it is possible to improve the e�ective quantizer resolution for a
�xed number of quantization intervals�

���� OVERSAMPLED PREDICTIVE SUBBAND CODERS ��
E�z� Qx�z� xq�z�
v�z�
v�z� e�z� a�z�
IN�G�z�
IN�G�z�
Encoder Decoder
R�z�
Fig� ��� Oversampled signal predictive subband coder�
It is easily seen that the quantizer output is a�z� ! G�z��v�z� " q�z��� which in
turn implies that the coder output is xq�z� ! R�z� �v�z� " q�z��� Using a PR FB �i�e��
R�z�E�z� ! IM�� we have R�z�v�z� ! R�z�E�z�x�z� ! x�z� so that
xq�z� ! x�z� "R�z�q�z� �
This yields the following result that can be interpreted as an extension of the funda�
mental theorem of predictive quantization �����
Theorem ��� For an oversampled signal predictive subband coder with
PR� i�e�� R�z�E�z� ! IM � the overall reconstruction error xq�z� � x�z� is
given by R�z�q�z��
Theorem �� allows to draw an important conclusion� Since the overall reconstruction
error is equal to the quantization noise �ltered by the synthesis FB� it follows from the
discussion in Chapter � �see Theorem ��� that the para�pseudo�inverse R�z� minimizes
the reconstruction error in the case of white and uncorrelated quantization noise�
Just like an oversampled signal predictive A�D converter� an oversampled signal pre�
dictive subband coder has to deal with two types of redundancies� namely natural
redundancy and synthetic redundancy �see Subsec� ������ Here� the synthetic redun�
dancy is introduced by the oversampled analysis FB� i�e�� by expanding the input signal
into a redundant set of functions that consists of time�shifted versions of the analysis
�lters� impulse responses� Obviously� for increasing oversampling factor� the prediction
becomes more accurate since there is more synthetic redundancy in the subband signals�
Note� furthermore� that the matrices Gk will in general not be diagonal� so that we are
performing both an intrachannel and an interchannel prediction�
The estimate v�m� !PL
k��Gk �v�m� k� " q�m� k�� of the subband signal vector
v�m� is based on quantized values of the past� We therefore have to deal with a noisy
vector prediction problem� In the case of high�resolution subband coding� i�e�� subband
coding with high�resolution quantizers in the subbands� the e�ect of quantization noise

�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
can be neglected and v�m� PLk��Gkv�m � k�� However� here we are primarily in�
terested in the speci�c case of low�resolution quantization� Therefore� in general� the
high�resolution assumption will not be justi�ed�
The multi�channel system G�z� is said to be minimum phase or minimum delay if all
the roots of detG�z� ! � lie inside the unit circle in the z�plane ����� This condition
ensures that the inverse �lter G���z� will be stable� which is needed for stability of
the feedback loop in the signal predictive subband coder ����� In the noiseless case
�q�z� ! ��� the optimal signal predictive subband coder has a minimum phase prediction
error system G�z� if the process v�m� is stationary and nondeterministic ����� A proof
of this important fact for the general case of vector prediction can be found in �����
Although in our case we were not able to prove the minimum phase property of G�z��
we always observed stability of G���z� in our simulation examples�
������ Optimum Multi�Channel Prediction System
We now derive the optimum prediction system� In contrast to the case of noise shaping
subband coders� the input signal x�n� will here be modeled as a random process that
is assumed wide�sense stationary� zero�mean� real�valued� and uncorrelated with the
quantization noise process q�m�� For simplicity� the analysis and synthesis �lters are
assumed real�valued as well� It will be convenient to introduce the �FB input vector�
x�m� ! �x�mM � x�mM " � ��� x�mM " M � ��T with M �M correlation matrices
Cx�l� ! Efx�m�xT �m � l�g and power spectral matrix Sx�z� !P�
l���Cx�l�z�l� Using
v�z� ! E�z�x�z�� the power spectral matrix of v�m� is given by ���
Sv�z� !�X
l���Cv�l�z
�l ! E�z�Sx�z�#E�z��
where
Cv�l� ! Efv�m�vT �m� l�g !�X
i���Ei
�Xj���
Cx�j�ETij�l �����
with CTv ��l� ! Cv�l�� With ���� � and using the fact that x�n� �and hence also v�m��
is uncorrelated with q�m�� it follows that the power spectral matrix of the prediction
error e�m� ! v�m�� v�m� is given by
Se�z� ! G�z�Sv�z� #G�z� " �IN �G�z��Sq�z��IN � #G�z�� �
Hence� the prediction error variance is obtained as
��e !
N
Z ���
����TrnG�ej����Sv�e
j����GH�ej����
"hIN �G�ej����
iSq�e
j����hIN �GH�ej����
iod� �
Inserting ������ into ������ and using CTv ��l� ! Cv�l� and CT
q ��l� ! Cq�l�� we obtain
further

���� OVERSAMPLED PREDICTIVE SUBBAND CODERS ��
�� !
NTr
�Cv����
LXl��
�CT
v �l�Gl "Cv�l�GTl
�
"LX
m��
Gm
LXl��
�Cv�l �m� "Cq�l �m��GTl
��
In order to calculate the matrices Gl minimizing ��e � we set� ���e�Gi
! � and use the
matrix derivative rules from Subsection ������� This yields the following block T�oplitz
system of linear equations�
LXl��
�Cv�l � i� "Cq�l � i��GTl ! CT
v �i� for i ! � �� ���� L � ������
or� equivalently�������
�� �� ��� �L����� �� ��� �L�����
������
����� L��� �� L��� ��� ��
������
������GT
�
GT����GT
L
������ !
������CT
v ��CT
v ������
CTv �L�
������ with �l ! Cv�l� "Cq�l� �
�����
Using ������ in ������� the minimum prediction error variance is obtained as
��e�min !
NTr
�Cv����
LXl��
Cv�l�GTl�opt
�� ������
where Gl�opt denotes the solution of ������ or ������
In the noiseless case� ������ reduces to
LXl��
Cv�l � i�GTl ! CT
v �i� for i ! � �� ���� L � ������
which can be solved e�ciently using the multi�channel Levinson recursion ���� An�
other important special case where this is possible is the noisy case with white �but
possibly correlated� quantization noise� i�e�� Cq�l� ! Cq�����l�� Here� ������ reduces to
������ with Cv��� replaced by Cv��� "Cq���� We �nally note that the above derivation
can easily be extended to incorporate correlations between v�m� and q�m��
������ An Example
As a simple example� let us reconsider the paraunitary two�channel Haar FB in Fig� �
�see Subsec� ������� with analysis �lters H��z� !�p��" z��� and H��z� !
�p��� z���
and minimum norm synthesis �lters F��z� !��#H��z� and F��z� !
��#H��z�� The input
process is an AR� process� i�e�� a �rst order Gauss�Markov process de�ned by x�n� !
�In the noiseless case� the optimum prediction system can be derived more elegantly using the
orthogonality principle ������

�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
ax�n � � " u�n� with correlation coe�cient a ! ��� and white driving noise u�n� with
variance equal to � The autocorrelation function of the AR� process is given by
Cx�k� !��
���
�jkj����� Inserting E� ! �p
�� �T and E� ! �p
�� ��T into ������ it
follows after simple manipulations that
Cv��� !
�� � �
� ���
�� and Cv�� !
�� ��� ��
��� ���
�� �
We shall now calculate the optimum �rst�order prediction system for the case where
no quantization noise is added to the subband signals �noiseless prediction�� With
L ! � there is G�z� ! I��G�z��� From ����� it follows with L ! that the optimum
coe�cient matrix G� is given by Cv���GT� ! CT
v ��� which yields
G��opt ! Cv��C�Tv ��� !
�� ��� ���
��� ���
�� �
The corresponding minimum prediction error variance is obtained from ������ as ��e !��TrfCv����Cv��G
T��optg ! ����
We shall next calculate the optimum prediction system for the noisy case� We assume
that the quantization noise is white and uncorrelated with variance ��q ! in each
channel� i�e�� Cq�k� ! I���k�� We shall again consider a �rst�order predictive subband
coder� i�e�� G�z� ! I� �G�z��� From ����� it follows that the optimum matrix G� is
given by
G��opt ! Cv���Cv��� " I���T !
�� �� ���
��� ���
�� �
The corresponding prediction error variance is obtained from ������ as ��e !��TrfCv����
Cv��GT��optg ! ��� �� �� Let us compare this result with a prediction system that
does not exploit the inter�channel correlations� and whose matricesGl are thus diagonal�
Setting
GD� !
�� �
� �
�� �
it follows from ������ that the prediction error variance is given by
��e !�
�� �
� "
�� "
�
�� "
�
���� ������
From ���e��
! � and ���e�
! �� we obtain the optimum coe�cients as ! �� and
� ! ���� and consequently
GD��opt !
�� �� �
� ���
�� � ������

���� OVERSAMPLED PREDICTIVE SUBBAND CODERS ��
Note that the diagonal elements of GD��opt equal those of G��opt� The corresponding
prediction error variance is obtained as ��e ! ���� We therefore conclude that exploiting
the inter�channel correlation is important� Finally� without prediction �i�e�� L ! � or
e�m� ! v�m�� the variance at the input of the quantizer is ��e ! ��� ����
Usually predictive coders are designed under the assumption of high�resolution quan�
tization� i�e�� the quantization noise is neglected� For coarse quantization� this approach
will obviously lead to a deterioration of coder performance� In the following simulation
we shall demonstrate the behavior of a predictive subband coder designed under the
high�resolution assumption� For the Haar FB oversampled by a factor �� we calculated
the prediction error variance resulting from a �rst�order high�resolution subband coder�
i�e��
G��opt ! Cv��Cv����T �
for white and uncorrelated quantization noise with variance ��q between �� and ���
This is shown by the solid curve in Fig� � � For comparison� the dashed�dotted line
shows the prediction error variance using a predictor that has been adjusted to the
�white and uncorrelated� quantization noise� i�e��
G��opt ! Cv���Cv��� " ��qI���T �
The signal x�n� was an AR� process with a ! ��� and driving noise variance equal to
� One can see that for small quantization noise variance� i�e�� in the high�resolution
range� the two prediction error variances are very close� For rougher quantization or
equivalently for lower resolution� the performance of the misadjusted predictor �solid
line in Fig� � � deteriorates signi�cantly� This shows the importance of including the
quantization noise in the design of low�resolution predictive subband coders� In prac�
tice this is done by assuming a quantization noise model and designing the predictor
accordingly�
����� Simulation Results
In the following we present simulation results demonstrating the performance of over�
sampled predictive subband coders� In all the simulations we used a paraunitary� odd�
stacked CMFB �with normalized analysis �lters� i�e�� khkk ! � with N ! � channels
and a prototype of length Lh ! ��� Furthermore� all the results have been obtained by
averaging over � realizations �of length ���� of the input stochastic process�
Simulation � �Synthetic redundancy�� With the �rst simulation example we
demonstrate that linear prediction is able to remove synthetic redundancy introduced
by the oversampled analysis FB� or equivalently� the predictor is able to exploit syn�
thetic redundancy for improving prediction accuracy� In this experiment� the input
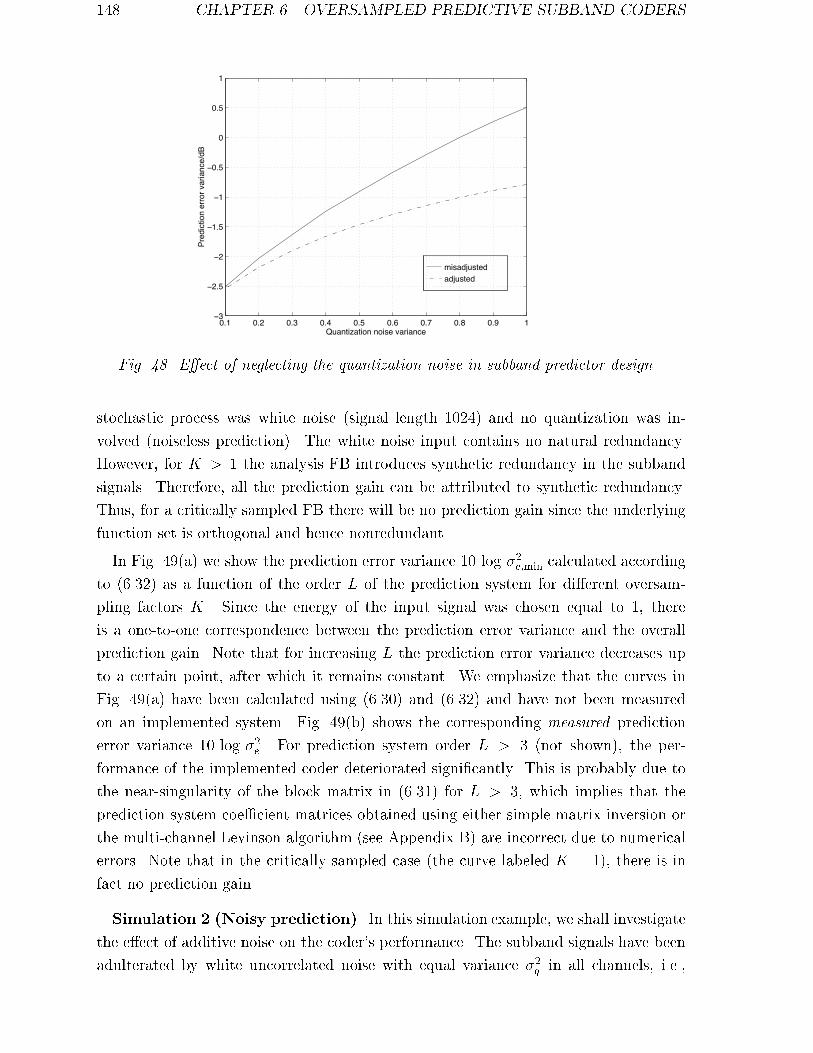
� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
misadjustedadjusted
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1−3
−2.5
−2
−1.5
−1
−0.5
0
0.5
1
Quantization noise variance
Pre
dict
ion
erro
r va
rianc
e/dB
Fig� � � E�ect of neglecting the quantization noise in subband predictor design�
stochastic process was white noise �signal length ���� and no quantization was in�
volved �noiseless prediction�� The white noise input contains no natural redundancy�
However� for K � the analysis FB introduces synthetic redundancy in the subband
signals� Therefore� all the prediction gain can be attributed to synthetic redundancy�
Thus� for a critically sampled FB there will be no prediction gain since the underlying
function set is orthogonal and hence nonredundant�
In Fig� ��a� we show the prediction error variance � log ��e�min calculated according
to ������ as a function of the order L of the prediction system for di�erent oversam�
pling factors K� Since the energy of the input signal was chosen equal to � there
is a one�to�one correspondence between the prediction error variance and the overall
prediction gain� Note that for increasing L the prediction error variance decreases up
to a certain point� after which it remains constant� We emphasize that the curves in
Fig� ��a� have been calculated using ������ and ������ and have not been measured
on an implemented system� Fig� ��b� shows the corresponding measured prediction
error variance � log ��e � For prediction system order L � � �not shown�� the per�
formance of the implemented coder deteriorated signi�cantly� This is probably due to
the near�singularity of the block matrix in ����� for L � �� which implies that the
prediction system coe�cient matrices obtained using either simple matrix inversion or
the multi�channel Levinson algorithm �see Appendix B� are incorrect due to numerical
errors� Note that in the critically sampled case �the curve labeled K ! �� there is in
fact no prediction gain�
Simulation � �Noisy prediction�� In this simulation example� we shall investigate
the e�ect of additive noise on the coder�s performance� The subband signals have been
adulterated by white uncorrelated noise with equal variance ��q in all channels� i�e��
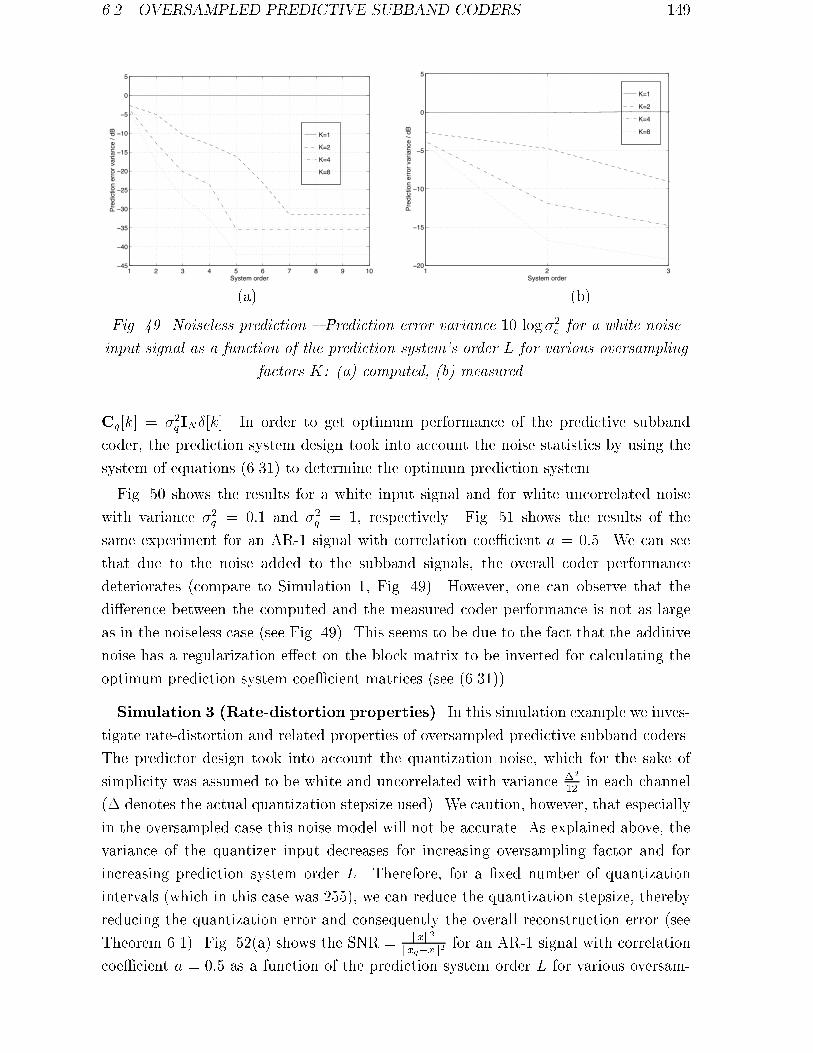
���� OVERSAMPLED PREDICTIVE SUBBAND CODERS �
K=1
K=2
K=4
K=8
1 2 3 4 5 6 7 8 9 10−45
−40
−35
−30
−25
−20
−15
−10
−5
0
5
System order
Pre
dict
ion
erro
r va
rianc
e / d
B
�a�
K=1
K=2
K=4
K=8
1 2 3−20
−15
−10
−5
0
5
System order
Pre
dict
ion
erro
r va
rianc
e / d
B
�b�
Fig� ��� Noiseless prediction � Prediction error variance � log ��e for a white noise
input signal as a function of the prediction system�s order L for various oversampling
factors K� a computed� b measured�
Cq�k� ! ��qIN��k�� In order to get optimum performance of the predictive subband
coder� the prediction system design took into account the noise statistics by using the
system of equations ����� to determine the optimum prediction system�
Fig� �� shows the results for a white input signal and for white uncorrelated noise
with variance ��q ! �� and ��q ! � respectively� Fig� � shows the results of the
same experiment for an AR� signal with correlation coe�cient a ! ���� We can see
that due to the noise added to the subband signals� the overall coder performance
deteriorates �compare to Simulation � Fig� ��� However� one can observe that the
di�erence between the computed and the measured coder performance is not as large
as in the noiseless case �see Fig� ��� This seems to be due to the fact that the additive
noise has a regularization e�ect on the block matrix to be inverted for calculating the
optimum prediction system coe�cient matrices �see �������
Simulation � �Rate�distortion properties�� In this simulation example we inves�
tigate rate�distortion and related properties of oversampled predictive subband coders�
The predictor design took into account the quantization noise� which for the sake of
simplicity was assumed to be white and uncorrelated with variance ��
��in each channel
�- denotes the actual quantization stepsize used�� We caution� however� that especially
in the oversampled case this noise model will not be accurate� As explained above� the
variance of the quantizer input decreases for increasing oversampling factor and for
increasing prediction system order L� Therefore� for a �xed number of quantization
intervals �which in this case was ����� we can reduce the quantization stepsize� thereby
reducing the quantization error and consequently the overall reconstruction error �see
Theorem ���� Fig� ���a� shows the SNR ! kxk�kxq�xk� for an AR� signal with correlation
coe�cient a ! ��� as a function of the prediction system order L for various oversam�
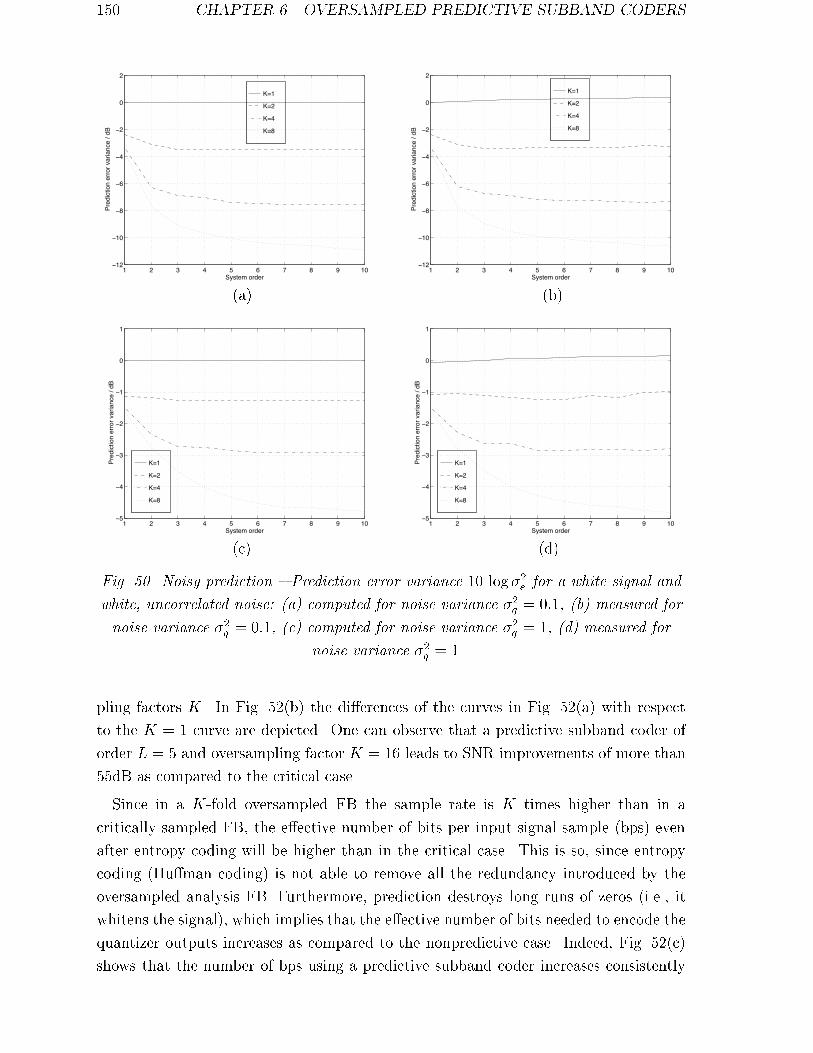
�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
K=1
K=2
K=4
K=8
1 2 3 4 5 6 7 8 9 10−12
−10
−8
−6
−4
−2
0
2
System order
Pre
dict
ion
erro
r va
rianc
e / d
B
�a�
K=1
K=2
K=4
K=8
1 2 3 4 5 6 7 8 9 10−12
−10
−8
−6
−4
−2
0
2
System order
Pre
dict
ion
erro
r va
rianc
e / d
B
�b�
K=1
K=2
K=4
K=8
1 2 3 4 5 6 7 8 9 10−5
−4
−3
−2
−1
0
1
System order
Pre
dict
ion
erro
r va
rianc
e / d
B
�c�
K=1
K=2
K=4
K=8
1 2 3 4 5 6 7 8 9 10−5
−4
−3
−2
−1
0
1
System order
Pre
dict
ion
erro
r va
rianc
e / d
B
�d�
Fig� ��� Noisy prediction � Prediction error variance � log ��e for a white signal and
white� uncorrelated noise� a computed for noise variance ��q ! ��� b measured for
noise variance ��q ! ��� c computed for noise variance ��q ! � d measured for
noise variance ��q ! �
pling factors K� In Fig� ���b� the di�erences of the curves in Fig� ���a� with respect
to the K ! curve are depicted� One can observe that a predictive subband coder of
order L ! � and oversampling factor K ! � leads to SNR improvements of more than
��dB as compared to the critical case�
Since in a K�fold oversampled FB the sample rate is K times higher than in a
critically sampled FB� the e�ective number of bits per input signal sample �bps��even
after entropy coding�will be higher than in the critical case� This is so� since entropy
coding �Hu�man coding� is not able to remove all the redundancy introduced by the
oversampled analysis FB� Furthermore� prediction destroys long runs of zeros �i�e�� it
whitens the signal�� which implies that the e�ective number of bits needed to encode the
quantizer outputs increases as compared to the nonpredictive case� Indeed� Fig� ���c�
shows that the number of bps using a predictive subband coder increases consistently
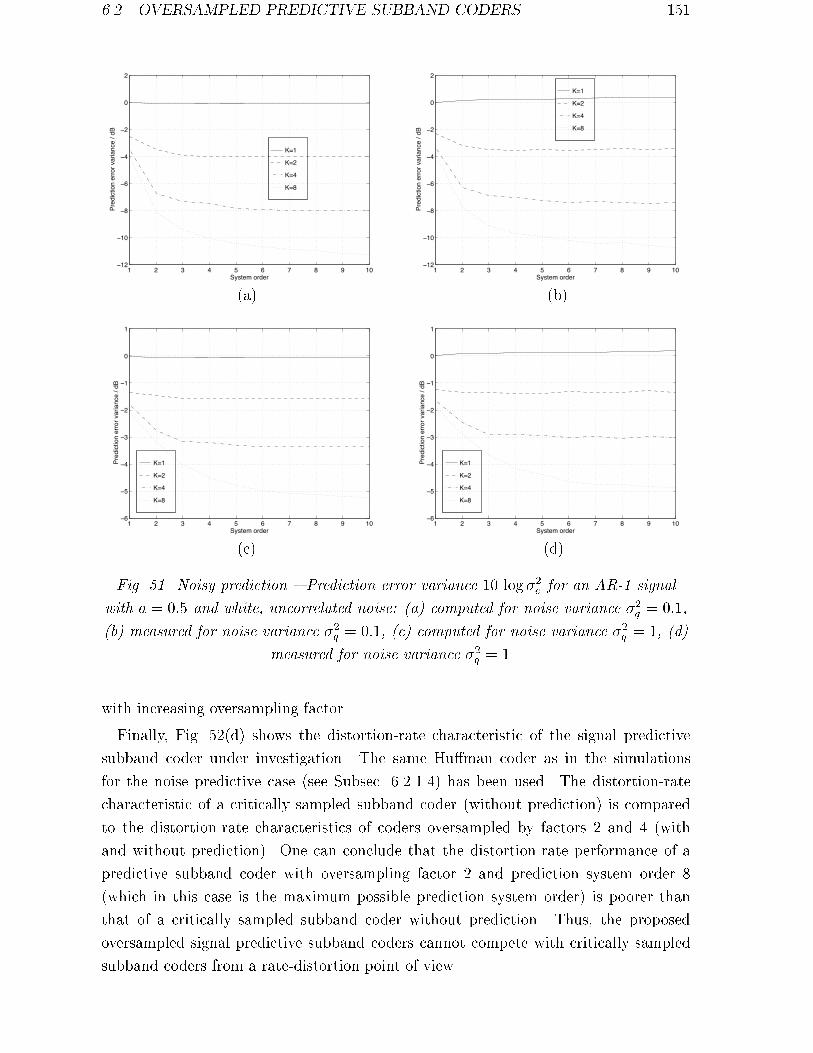
���� OVERSAMPLED PREDICTIVE SUBBAND CODERS �
K=1
K=2
K=4
K=8
1 2 3 4 5 6 7 8 9 10−12
−10
−8
−6
−4
−2
0
2
System order
Pre
dict
ion
erro
r va
rianc
e / d
B
�a�
K=1
K=2
K=4
K=8
1 2 3 4 5 6 7 8 9 10−12
−10
−8
−6
−4
−2
0
2
System order
Pre
dict
ion
erro
r va
rianc
e / d
B
�b�
K=1
K=2
K=4
K=8
1 2 3 4 5 6 7 8 9 10−6
−5
−4
−3
−2
−1
0
1
System order
Pre
dict
ion
erro
r va
rianc
e / d
B
�c�
K=1
K=2
K=4
K=8
1 2 3 4 5 6 7 8 9 10−6
−5
−4
−3
−2
−1
0
1
System order
Pre
dict
ion
erro
r va
rianc
e / d
B
�d�
Fig� ��� Noisy prediction � Prediction error variance � log ��e for an AR�� signal
with a ! ��� and white� uncorrelated noise� a computed for noise variance ��q ! ���
b measured for noise variance ��q ! ��� c computed for noise variance ��q ! � d
measured for noise variance ��q ! �
with increasing oversampling factor�
Finally� Fig� ���d� shows the distortion�rate characteristic of the signal predictive
subband coder under investigation� The same Hu�man coder as in the simulations
for the noise predictive case �see Subsec� ������� has been used� The distortion�rate
characteristic of a critically sampled subband coder �without prediction� is compared
to the distortion�rate characteristics of coders oversampled by factors � and � �with
and without prediction�� One can conclude that the distortion�rate performance of a
predictive subband coder with oversampling factor � and prediction system order
�which in this case is the maximum possible prediction system order� is poorer than
that of a critically sampled subband coder without prediction� Thus� the proposed
oversampled signal predictive subband coders cannot compete with critically sampled
subband coders from a rate�distortion point of view�
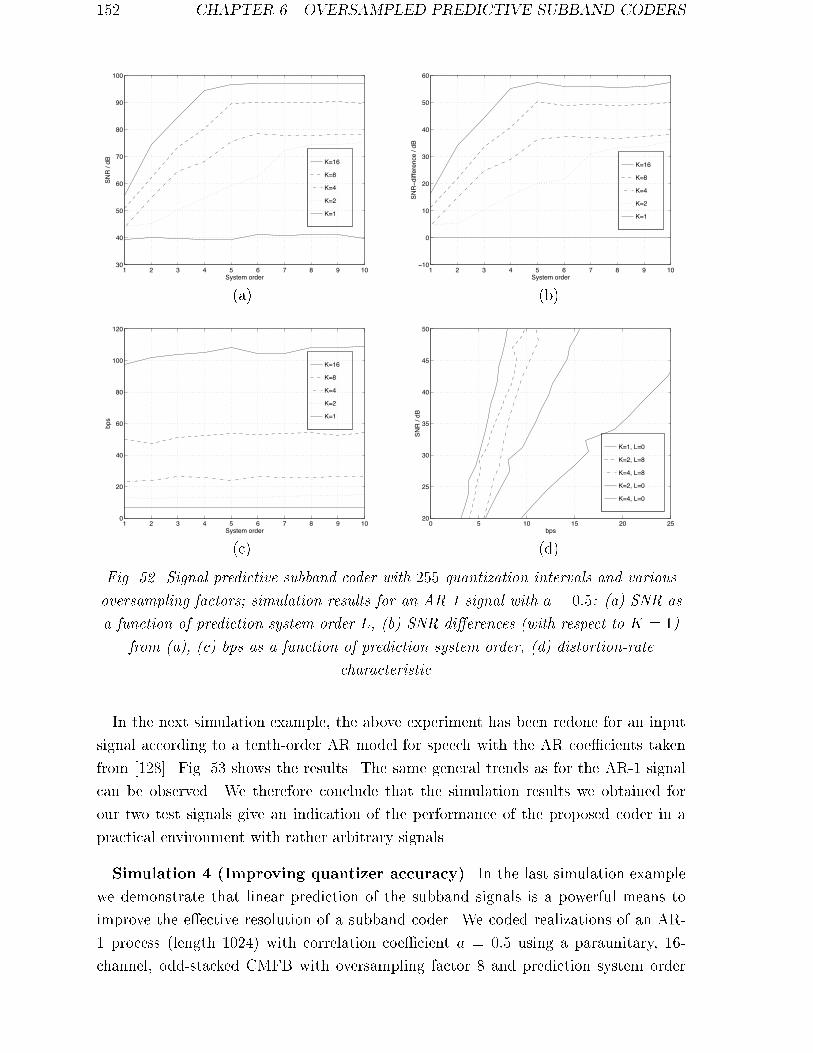
�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
K=16
K=8
K=4
K=2
K=1
1 2 3 4 5 6 7 8 9 1030
40
50
60
70
80
90
100
System order
SN
R /
dB
�a�
K=16
K=8
K=4
K=2
K=1
1 2 3 4 5 6 7 8 9 10−10
0
10
20
30
40
50
60
System order
SN
R−
diffe
renc
e / d
B
�b�
K=16
K=8
K=4
K=2
K=1
1 2 3 4 5 6 7 8 9 100
20
40
60
80
100
120
System order
bps
�c�
K=1, L=0
K=2, L=8
K=4, L=8
K=2, L=0
K=4, L=0
0 5 10 15 20 2520
25
30
35
40
45
50
bps
SN
R /
dB
�d�
Fig� ��� Signal predictive subband coder with ��� quantization intervals and various
oversampling factors� simulation results for an AR�� signal with a ! ���� a SNR as
a function of prediction system order L� b SNR di�erences with respect to K !
from a� c bps as a function of prediction system order� d distortion�rate
characteristic�
In the next simulation example� the above experiment has been redone for an input
signal according to a tenth�order AR model for speech with the AR coe�cients taken
from �� �� Fig� �� shows the results� The same general trends as for the AR� signal
can be observed� We therefore conclude that the simulation results we obtained for
our two test signals give an indication of the performance of the proposed coder in a
practical environment with rather arbitrary signals�
Simulation �Improving quantizer accuracy�� In the last simulation example
we demonstrate that linear prediction of the subband signals is a powerful means to
improve the e�ective resolution of a subband coder� We coded realizations of an AR�
process �length ���� with correlation coe�cient a ! ��� using a paraunitary� ��
channel� odd�stacked CMFB with oversampling factor and prediction system order
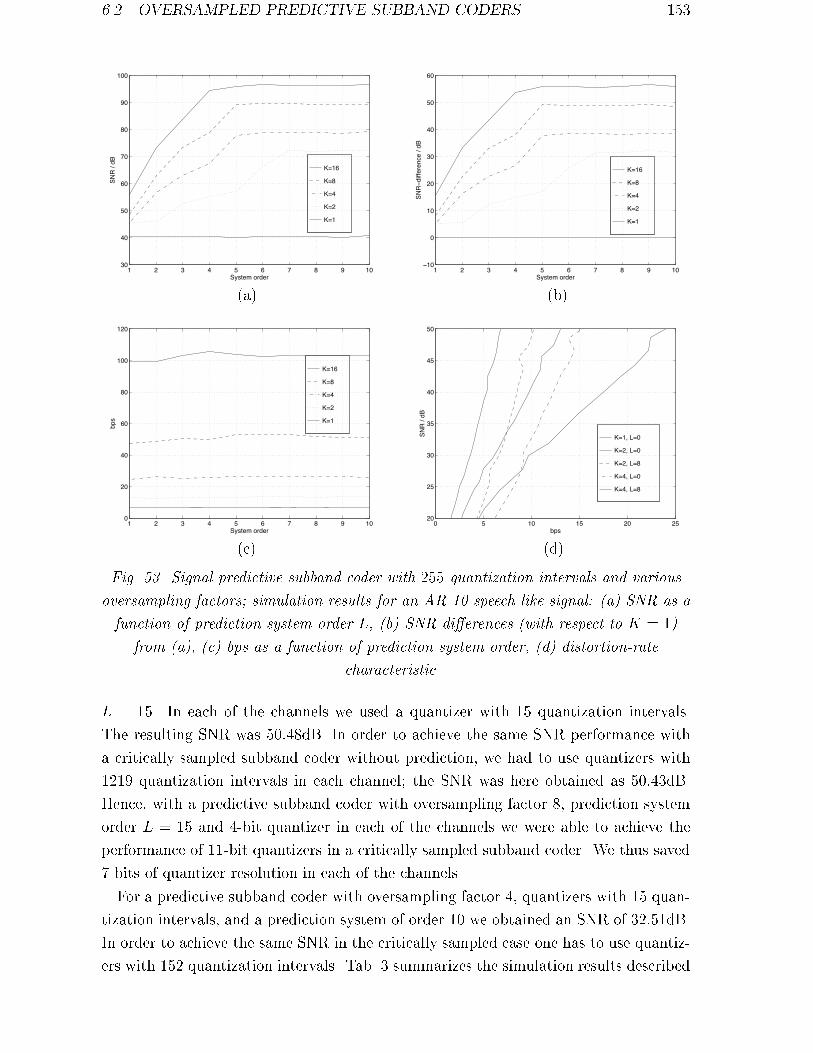
���� OVERSAMPLED PREDICTIVE SUBBAND CODERS ��
K=16
K=8
K=4
K=2
K=1
1 2 3 4 5 6 7 8 9 1030
40
50
60
70
80
90
100
System order
SN
R /
dB
�a�
K=16
K=8
K=4
K=2
K=1
1 2 3 4 5 6 7 8 9 10−10
0
10
20
30
40
50
60
System order
SN
R−
diffe
renc
e / d
B
�b�
K=16
K=8
K=4
K=2
K=1
1 2 3 4 5 6 7 8 9 100
20
40
60
80
100
120
System order
bps
�c�
K=1, L=0
K=2, L=0
K=2, L=8
K=4, L=0
K=4, L=8
0 5 10 15 20 2520
25
30
35
40
45
50
bps
SN
R /
dB
�d�
Fig� ��� Signal predictive subband coder with ��� quantization intervals and various
oversampling factors� simulation results for an AR��� speech�like signal� a SNR as a
function of prediction system order L� b SNR di�erences with respect to K !
from a� c bps as a function of prediction system order� d distortion�rate
characteristic�
L ! �� In each of the channels we used a quantizer with � quantization intervals�
The resulting SNR was ���� dB� In order to achieve the same SNR performance with
a critically sampled subband coder without prediction� we had to use quantizers with
� quantization intervals in each channel� the SNR was here obtained as �����dB�
Hence� with a predictive subband coder with oversampling factor � prediction system
order L ! � and ��bit quantizer in each of the channels we were able to achieve the
performance of �bit quantizers in a critically sampled subband coder� We thus saved
� bits of quantizer resolution in each of the channels�
For a predictive subband coder with oversampling factor �� quantizers with � quan�
tization intervals� and a prediction system of order � we obtained an SNR of ����dB�
In order to achieve the same SNR in the critically sampled case one has to use quantiz�
ers with �� quantization intervals� Tab� � summarizes the simulation results described
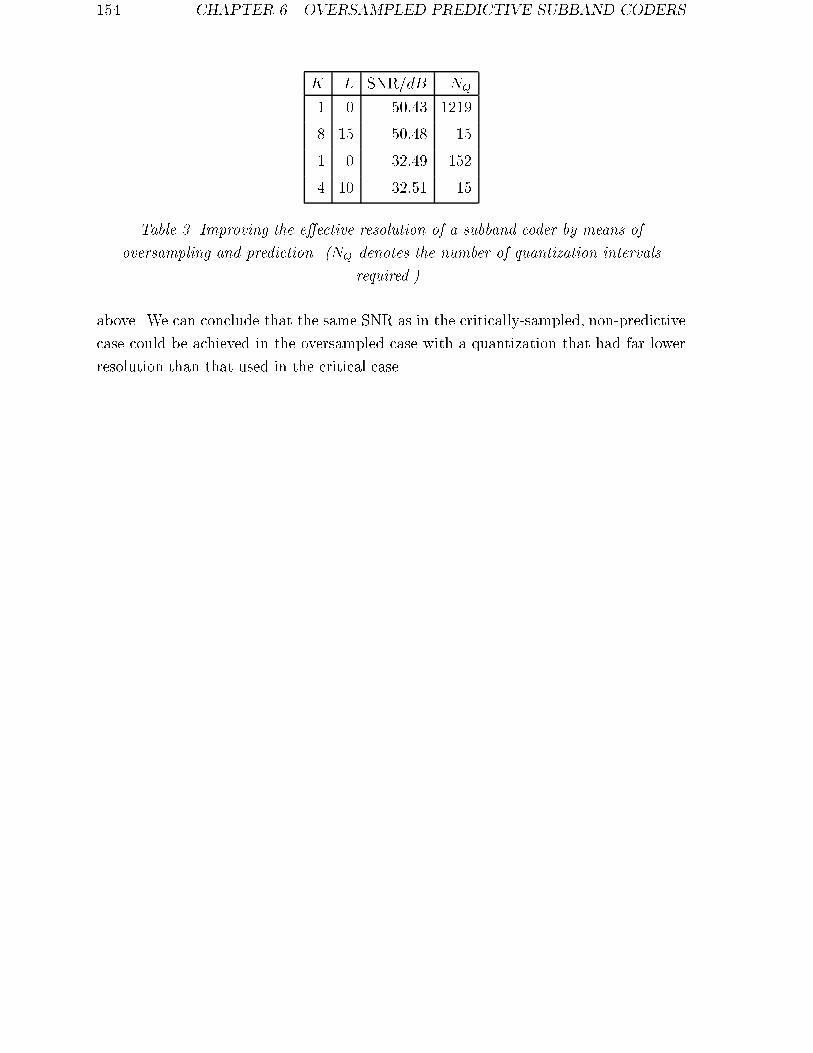
�� CHAPTER �� OVERSAMPLED PREDICTIVE SUBBAND CODERS
K L SNR�dB NQ
� ����� �
� ���� �
� ���� ��
� � ���� �
Table �� Improving the e�ective resolution of a subband coder by means of
oversampling and prediction� NQ denotes the number of quantization intervals
required�
above� We can conclude that the same SNR as in the critically�sampled� non�predictive
case could be achieved in the oversampled case with a quantization that had far lower
resolution than that used in the critical case�

Chapter �
Conclusion
This dissertation has investigated theoretical and practical aspects of oversampled �lter
banks� We have shown that the theory of frames is a powerful vehicle for the analysis
and design of oversampled �lter banks �FBs�� A key result on which most of our theory
was based is the fact that the polyphase matrices provide matrix representations of
the frame operator� We demonstrated that the frame bounds characterize important
numerical properties of FBs� and that they can be obtained by an eigenanalysis of the
polyphase matrices� For a given oversampled analysis FB� we provided a compact and
useful parameterization of all synthesis FBs providing perfect reconstruction �PR�� and
we discussed the PR synthesis FB with minimum norm �i�e�� the particular synthesis
FB obtained from frame theory� and its approximative construction� We formulated
conditions for an oversampled FB to provide a frame decomposition� We also proposed
a new method for constructing paraunitary FBs from given nonparaunitary FBs�
We furthermore studied oversampled modulated FBs� Speci�cally� we introduced
two classes of oversampled cosine modulated �lter banks �CMFBs�� thus extending a
classi�cation of CMFBs recently proposed by Gopinath for critical sampling� The class
of oversampled even�stacked CMFBs is especially attractive as it allows both PR and
linear phase �lters in all channels� The CMFB recently introduced for critical sampling
by Lin and Vaidyanathan has been extended to the oversampled case and shown to be
a special case of even�stacked CMFBs�
We derived PR conditions for oversampled odd� and even�stacked CMFBs and demon�
strated that� concerning both PR and frame�theoretic properties� CMFBs are closely
related to DFT FBs of the same stacking type and with twice the oversampling factor�
In particular� it has been shown that any oversampled PR CMFB corresponds to an
oversampled PR DFT FB� and that under an additional condition the frame bound
ratio of a CMFB equals that of the corresponding DFT FB� We brie�y discussed the
design and e�cient DCT�DST�based implementation of oversampled CMFBs�
We have introduced two methods for noise reduction in oversampled FBs� These
��

�� CHAPTER � CONCLUSION
methods are based on predictive quantization� they can be viewed as extensions of
oversampled predictive A�D converters� We demonstrated that predictive quantization
in oversampled FBs yields considerable quantization noise reduction&in fact� signi��
cantly larger noise reduction than previous methods&at the cost of increased rate� The
combination of oversampled FBs with noise shaping or linear prediction improves the
e�ective resolution of subband coders and is thus well suited for applications where&for
technological or other reasons&quantizers with low resolution �even single bit� have to
be used� Using low resolution quantizers in the digital domain increases circuit speed
and allows for lower circuit complexity� One�bit codewords� for example� eliminate the
need for word�framing�
We furthermore addressed the long�standing question of rate�distortion performance
of oversampled subband coders� Our simulation results suggest that� from a rate�
distortion point of view� oversampled subband coders are inferior to critically sampled
subband coders� However� this issue might appear in a di�erent light if perceptual
distortion measures are adopted and the increased design freedom in oversampled FBs
is exploited to obtain �lters with improved perceptual properties�

Appendix A
The Theory of Frames
A�� Motivation and De�nition of Frames
This appendix provides an introduction to the theory of frames� which has been intro�
duced by R� J� Du�n and A� C� Schae�er ����� It has been worked out by I� Daubechies
�� �� and several other authors ���� ���� We shall review the general theory of frames�
The special type of uniform �lter bank frames� which is the type of frames relevant to
�lter banks� is discussed in great detail in Chapter �� Throughout this appendix� we
shall make extensive use of basic linear operator theory� which is discussed for example
in ���� Most of the material in this appendix is taken from ���� � ��� An excellent
overview of frame theory and related topics can also be found in �����
In the following� let� fgk�n�g �k � K� K a denumerable set� be a set of functions taken
from a Hilbert space H� Note that this set need not be orthonormal or orthogonal� It is
convenient to de�ne a linear operator T which assigns to each signal x�n� the sequence
of inner products �Tx�k ! hx� gki� Throughout this appendix we assume that fgk�n�gis a Bessel sequence� i�e��
Pk jhx� gkij� � � for all x�n� � H�
De�nition A��� The linear operator T is de�ned as the operator that
maps the Hilbert space H into the space l��ZZ� of square�summable complex
sequences�
T � H � l��ZZ��
it assigns to each signal x�n� the sequence of inner products hx� gki�T � x� hx� gkik�K or equivalently �Tx�k ! hx� gki�
Note that kTxk� !P
k j�Tx�kj� !P
k jhx� gkij�� i�e�� the energy kT xk� of Tx can be
expressed as
kTxk� !Xk
jhx� gkij�� �A��
�We restrict our attention to discretetime signals�
��

� APPENDIX A� THE THEORY OF FRAMES
Since fgk�n�g is a Bessel sequence� there exists a constant B � � such that ����
kTxk� � Bkxk� � x�n� � H� �A���
We shall next formulate the properties which the gk�n� and the operator T should
satisfy�
� The linear operator T is continuous and hence bounded�� Since we are considering
Bessel sequences fgk�n�g this requirement is automatically satis�ed ����� From
�A��� it follows that the expansion coe�cients hx� gki have �nite energy if the
signal x�n� has �nite energy� i�e�� the expansion coe�cients are square�summable�
�� The signal x�n� can be reconstructed from the coe�cients hx� gki� In order to
satisfy this requirement� the operator T has to be left invertible�� which means
that T is invertible on its range� Ran�T �� Note that in general Ran�T � will be a
subspace of l��ZZ�� The left inverse of T will be denoted T���
�� The reconstruction of the signal x�n� from the sequence hx� gki should be numeri�
cally stable� If two sequences ck ! hx� gki and dk ! hy� gki are �close� in the sense
that kc � dk� !P
k jck � dkj� is small� then x�n� and y�n� should be �close� in
the sense that kx � yk� !P
n jx�n� � y�n�j� is small� Thus� for example� small
errors in transmitted analysis coe�cients or round�o� errors in the reconstruction
process would not be disastrous� We therefore require that the left inverse T ��
be continuous and hence bounded� Note that the mere continuity of T does not
say anything about the continuity of T���
Requirement implies �A���� i�e��
kTxk� � Bkxk�� �A���
with a positive constant B ��� With �A��� this can be rewritten as
Xk
jhx� gkij� � Bkxk�� �A���
which implies that the expansion coe�cients hx� gki have �nite energy if the signal x�n�
has �nite energy� In requirement � we demand that the left inverse T�� is continuous�
This is the case if and only if the operator T is bounded below ���� i�e��
kTxk� � Akxk���A linear operator L � X � Y where X and Y are normed linear spaces is said to be bounded if
there is a real number M � � such that kLxk � Mkxk for all x�n� � X � If the operator satis es
kLxk � mkxk for all x�n� � X it is said to be bounded below��A mapping L � X � Y is said to be left invertible if a mapping M � Y � X exists such that
ML � I �the identity mapping� on the space X ��Ran�T � denotes the range of the operator T � i�e�� Ran�T � � fy j y � Tx with x � Xg

A��� MOTIVATION AND DEFINITION OF FRAMES �
with A � �� With �A�� this condition can be rewritten asXk
jhx� gkij� � Akxk��
Combining the last two requirements� we are now able to give the following de�nition�
De�nition A��� A set of signals gk�n� � H �k � K� is called a frame for
the Hilbert space H if
Akxk� � Xk
jhx� gkij� � Bkxk� � x�n� � H �A���
with A�B � IR and � � A � B � �� Valid constants A and B are called
frame bounds�
Using �A�� in �A���� an equivalent formulation of �A��� is
Akxk� � kTxk� � Bkxk� � x�n� � H� �A���
This means that the energy of Tx is bounded above and below by the product of the
frame bounds and the signal�s energy� The existence of a lower frame bound A � �
guarantees a certain degree of numerical stability� Besides that it also guarantees the
completeness of the set fgk�n�gk�K� i�e�� the only signal that is orthogonal to all the
gk�n� �k�K� is the zero signal x�n� ! ��
We next de�ne the operator T which maps the coe�cient l��ZZ� space to the Hilbert
space H�
De�nition A��� The linear operator T is de�ned as
T � l��ZZ��H �A���
�Tck��n� !Xk
ck gk�n�� where ck � l��ZZ�� �A� �
We shall next show that the operator T is the adjoint� T � of T � Consider an arbitrary
sequence ck � l��ZZ�� We have to prove that
hT x� cki ! hx�T cki�This can be seen by noting that
hTx� cki !Xk
hx� gkic�k
hx�Tcki !Dx�Xk
ckgkE!Xk
c�khx� gki�
So we showed that the adjoint operator of T is T�
T ! T �� �A��
In what follows� we shall always write T � instead of T ��Let L � X � Y be a bounded linear operator where X and Y are Hilbert spaces� Furthermore
x � X and y � Y � The unique bounded linear operator L� which satis es�Lx� y
��x�L�y
for any
x � X and y � Y is the adjoint of L�

�� APPENDIX A� THE THEORY OF FRAMES
A�� The Frame Operator
De�nition A�� For a frame fgk�n�g the operator
S ! T �T �
�Sx��n� !Xk�K
hx� gki gk�n�
is said to be the frame operator�
We can write
�Sx��n� !Xn�S�n� n�� x�n���
where S�n� n��� the kernel of the frame operator S �i�e� its in�nite matrix representation��
is given by
S�n� n�� !Xk�K
gk�n� g�k�n
��� �A���
We note that S maps H onto H ����� and that
Xk
jhx� gkij� ! kTxk� ! hSx� xi� �A��
We are now able to formulate the frame condition with the frame operator S� Equation
�A��� can also be written as
Akxk� � hSx� xi � Bkxk�� �A���
An equivalent formulation of �A��� is �
AI � S � BI� �A���
where I is the identity operator on H� From �A���� it also follows that
kSk � B� �A���
This is seen as follows�
kSk ! supx�H
kSxkkxk ! sup
x�H
vuuthSx�Sxikxk� !
vuuut supx�H
hS�x� xikxk�
!q�sup ! sup�
By Theorem A� �see below� this implies kSk � B� Here we have used S� ! S�
We shall now formulate an important theorem on the eigenvalues of the frame oper�
ator��This relation is to be understood in the sense of quadratic forms� i�e�� A
�x� x��Sx� x
� B
�x� x
for all x�n� � H�

A��� THE DUAL FRAME �
Theorem A�� ���� Let inf �sup� denote the in�mum �supremum� of the
eigenvalues of the frame operator S� Then
A � inf and B � sup�
Proof� With ���
inf � hSx� xikxk� � sup
and �A��� the proof follows immediately� �
While the frame bounds A�B are not uniquely de�ned� this theorem shows that the
tightest possible frame bounds are given by inf and sup� respectively�
We shall now discuss the properties of S� The frame operator S is
� linear�
�� positive de�nite� i�e� hSx� xi � � for all x�n� � H�
�� self�adjoint� S� ! S�
�� invertible on H� i�e�� the inverse operator S�� exists and is bounded with
BI � S�� �
AI�
The linearity of S follows from the fact that S is obtained by cascading a linear operator
and its adjoint �see De�nition A���� To see that S is positive de�nite note that� with
�A�� and �A����
hSx� xi ! kT xk� � Akxk� � �
for all x�n� ! �� Hence� S must also be self�adjoint� The invertibility follows directly
from A I � S � B I with A � ��
Besides the frame operator S ! T �T � also the composite operator TT � is important�
This operator will be discussed in Section A��
A�� The Dual Frame
We have seen above that S is invertible on H with bounded inverse S�� satisfying
BI � S
�� �
AI� �A���

�� APPENDIX A� THE THEORY OF FRAMES
Theorem A�� ��� If fgk�n�g is a frame with frame bounds A and B� then
the family f#gk�n�g given by
#gk�n� ! �S��gk��n� �A���
is a frame with bounds A� ! �Band B� ! �
A� The associated operator which
assigns to each x�n� � H the sequence hx� #gki��T � H � l��ZZ�
�T � x� hx� #gkik�K or equivalently � �Tx�k ! hx� #gki�
is given by�T ! TS�� ! T �T �T ����
Proof ��� From �A��� it follows with B � � that S�� is positive de�nite and thus
self�adjoint� Hence we have hx� #gki ! hx�S��gki ! hS��x� gki for all x�n� � H� Thus�
using �A��� we obtain
Xk
jhx� #gkij� !Xk
jhS��x� gkij� ! hS�S��x��S��xi ! hx�S��xi ! hS��x� xi�
So we can conclude from �A��� that
Bkxk� �X
k
jhx� #gkij� �
Akxk�� �A���
i�e�� the #gk�n� constitute a frame with frame bounds A� ! �B
and B� ! �A� It remains to
show that �T ! TS���
� �Tx�k ! hx� #gki ! hx�S��gki ! hS��x� gki ! �TS��x�k� �
We shall call f#gk�n�g the dual frame associated to the frame fgk�n�g� For the dual
frame too� it is convenient to introduce the dual frame operator�
De�nition A��� The frame operator associated to the dual frame�
�S ! �T� �T � � �Sx��n� !
Xk
hx� #gki#gk�n��
will be called the dual frame operator�
Theorem A��� The dual frame operator �S satis�es
�S ! S��� �A� �

A��� THE DUAL FRAME ��
Proof� For any x�n� � H� we have
� �Sx��n� !Xk
hx� #gki#gk�n� !Xk
hx�S��gki�S��gk��n�
!
�S��X
k
hS��x� gkigk��n� ! �S��SS��x��n� ! �S��x��n�� �
Now there arises the question how the dual frame f#gk�n�g can be obtained from
fgk�n�g� Due to Theorem A��� #gk�n� ! �S��gk��n�� The following theorem presents a
series expansion of S���
Theorem A� ���� Let fgk�n�g and f#gk�n�g be dual frames in H� and let A
and B be the frame bounds of fgk�n�g� We then have
S�� !
�
A "B
�Xl��
I � �
A"BS
�l�A��
or equivalently
#gk�n� !�
A"B
�Xl��
I � �
A"BS
�lgk�n�
�� �A����
The Neumann series �A�� is guaranteed to converge uniformly ���� This
convergence is governed by the frame bounds A�B according to
!!!!I � �
A"BS
!!!! � B � A
B " A� �
Proof ��� Recall that #gk�n� ! �S��gk��n�� We have S�� ! �AB
hI � �I � �
ABS�i��
�
When the Neumann series expansion ofhI � �I � �
ABS�i��
converges uniformly� we
obtain
S�� !
�
A"B
�I �
I � �
A "BS
����!
�
A"B
�Xl��
I � �
A"BS
�l�
The Neumann series converges uniformly if kI � �AB
Sk � � From �A��� it follows
that
��B I � ��S � ��A I j" �A"B�I
�A�B� I � �A"B� I � �S � �B � A� I
�B � A
A"BI � I � �
ABS � B � A
B " AI�
�The Neumann series expansion of �I ��A���� where A is a continuous linear operator and � �CI�
is given by �I � �A��� �P�
k�� �kA
k ����� Note that this series expansion converges absolutely only
if kAk � �
j�j �����

�� APPENDIX A� THE THEORY OF FRAMES
So we conclude that!!!!I � �
A "BS
!!!! � B � A
B " A� � since � � A � B� � �A���
The closer A to B� the better the convergence� Frames with A B are called snug
frames� A special �optimum� case is a frame with A ! B� which is known as tight frame
�see Section A����
We shall next consider the operator which provides the orthogonal projection of an
arbitrary sequence onto the range of the operator T �
Theorem A�� ���� The operator
P � l��ZZ�� Ran�T � � l��ZZ�
de�ned as
P ! �TT � ! TS��T � ! T �T�
is the orthogonal projection operator on Ran�T � �which is a closed subspace
of l��ZZ���
Note that P is de�ned for all sequences ck � l��ZZ�� and
�P c�k ! � �TT �c�k !
��TXl
clgl�n�
�k
!DX
l
clgl� #gkE!Xl
clhgl� #gki
or equivalently
�P c�k ! �T �T�c�k !
�TXl
cl#gl�n�
�k
!DX
l
cl#gl� gkE!Xl
clh#gl� gki�
Proof ��� We have to show that
� P is the identity operator I on Ran�T ��
�� P is the zero operator on �Ran�T ���
We �rst prove that P is the identity operator for c � Ran�T �� If c � Ran�T �� c ! Tx�
then P c ! �TT �c ! TS��T �c ! TS��T �T x ! TS��Sx ! Tx ! c�
The second part of the proof is based on the fact �shown in ���� p� �� � that c ��Ran�T �� if and only if T �c ! �� Assuming now that c � �Ran�T �� one obtains
P c ! �TT �c ! �
since T �c ! � for c � �Ran�T ��� �

A��� SIGNAL EXPANSIONS ��
A�� Signal Expansions
The following theorem can be considered the central result of the theory of frames� It
states that any signal x�n� � H can be expanded into a frame� The expansion coe�cients
can be chosen as the inner products of x�n� with the dual frame functions� The question
whether or not these coe�cients are unique will be addressed in Section A���
Theorem A�� Let fgk�n�g and f#gk�n�g be dual frames in H� Any signal
x�n� � H can be expressed as the unconditionally norm�convergent series
x�n� ! �T � �Tx��n� !Xk
hx� #gki gk�n� �A����
x�n� ! � �T�Tx��n� !
Xk
hx� gki #gk�n�� �A����
Note that� equivalently�
T� �T ! �T
�T ! I� �A����
where I is the identity operator on H�
Proof� We have
�T � �T x��n� !Xk
hx� #gkigk�n� !Xk
hx�S��gkigk�n�
!Xk
hS��x� gkigk�n� ! �SS��x��n� ! x�n��
which proves T � �T ! I or� equivalently� �A����� The expansion �A���� can be proved in
a similar manner� �
Equations �A���� and �A���� are �completeness relations�� since they can also be written
as Xk
gk�n� #g�k�n
�� !Xk
#gk�n� g�k�n
�� ! I�n� n��� �A����
where I�n� n�� is the kernel of the identity operator I on H�
The duality of the families fgk�n�g and f#gk�n�g is also expressed by the following
corollary�
Corollary A��� For any x�n�� y�n� � H we have
hx� yi ! hTx� �T yi !Xk
hx� gki h#gk� yi �A����
and hx� yi ! h �T x�T yi !Xk
hx� #gki hgk� yi� �A����

�� APPENDIX A� THE THEORY OF FRAMES
Proof� With �T�T ! I and T � �T ! I� we have
hx� yi ! hIx� yi ! h �T �Tx� yi ! hTx� �T yi !Xk
hx� gkih#gk� yi
hx� yi ! hIx� yi ! hT � �Tx� yi ! h �Tx�T yi !Xk
hx� #gkihgk� yi� �
De�nition A�� A frame fgk�n�g with frame bounds A ! B is called a
tight frame�
Note that� for a tight frame�
hSx� xi !Xk
jhx� gkij� ! Akxk�� �A�� �
Corollary A��� If fgk�n�g is a tight frame in H� then
S ! AI �A���
or equivalently
�Sx��n� !Xk
hx� gki gk�n� ! Ax�n� � x�n� � H� �A����
Proof� Combining A I � S � B I and A ! B� we obtain S ! AI and furthermore
x�n� ! �Ix��n� !
A�Sx��n� !
A
Xk
hx� gki gk�n�� �
If fgk�n�g is a tight frame� then the dual frame f#gk�n�g is tight as well� This can be
seen by noting that S ! AI implies
S�� !
AI�
Furthermore we have Xk
jhx� #gkij� ! hS��x� xi !
Akxk��
We can see that tight frames provide an easy way of reconstruction� because #gk�n� !�Agk�n� and thus calculation of the dual frame is trivial� It is evident that every orthonor�
mal system is a tight frame with A ! � Note� however� that conversely a tight frame
�even with A ! � need not be an orthonormal or orthogonal system� An interesting
special case is considered in the next theorem�
Theorem A�� ����� A tight frame with A ! and kgkk� ! for all k � K
is an orthonormal system�

A��� SIGNAL EXPANSIONS ��
Proof ��� Combining
hSgl� gli ! Akglk� ! kglk�
and
hSgl� gli !Xk
jhgl� gkij� ! kglk� "Xk ��ljhgl� gkij��
we obtain
kglk� "Xk ��ljhgl� gkij� ! kglk��
Since kglk� ! for all l� it follows thatPk ��ljhgl� gkij� ! �� This implies that the functions
gk�n� are orthogonal to each other� which completes the proof� �
As mentioned in Section A��� the convergence speed of the expansion �A�� depends
on the quotient of the frame bounds B and A� Let us consider the extreme case of
retaining only the �rst term �corresponding to l ! �� in the series expansion �A�����
i�e�� the dual frame functions #gk�n� are approximated by
#gk���n� !�
A"Bgk�n��
Note that this approximation of #gk�n� corresponds to an approximation of the recon�
structed signal x�n� !P
k hx� gki #gk�n� by
x��n� !�
A"B
Xk
hx� gki gk�n��
The following theorem states a result on the error incurred when using this crude
approximation�
Theorem A� ���� The norm of the error signal
R�n� ! x�n�� x��n�
incurred when approximating x�n� by
x��n� !�
A "B
Xk
hx� gki gk�n�
is bounded as
kRk �BA�
AB"
kxk� �A���

� APPENDIX A� THE THEORY OF FRAMES
Proof ���� From Theorem A�� and Theorem A�� we have
x�n� !Xk
hx� gki #gk�n� !Xk
hx� gki �
A"B
�Xl��
I � �
A"BS
�lgk�n�
!Xk
hx� gki �
A "B
gk�n� "
�Xl��
I � �
A "BS
�lgk�n�
��
Hence we obtain
R�n� ! x�n��Xk
hx� gki �
A"Bgk�n�
!Xk
hx� gki �
A "B
�Xl��
I � �
A "BS
�lgk�n�
and furthermore
kRk !
!!!!!Xk
hx� gki �
A"B
�Xl��
I � �
A"BS
�lgk
!!!!!!
�
A"B
!!!!!�Xl��
I � �
A"BS
�lXk
hx� gkigk!!!!!
� �
A"B
!!!!!�Xl��
I � �
A"BS
�l!!!!!!!!X
k
hx� gkigk!!!
!�
A"B
!!!!!�Xl��
I � �
A"BS
�l!!!!! kSxk� �
A"B
�Xl��
!!!!I � �
A"BS
!!!!l kSxk� �
A"B
�Xl��
!!!!I � �
A"BS
!!!!l kSk kxk�In the proof of Theorem A��� we have shown that
!!!!I � �
A"BS
!!!! � B � A
B " A�
Hence
�
A"B
�Xl��
!!!!I � �
A"BS
!!!!l kSk kxk � �
A "B
�Xl��
B � A
B " A
�lkSk kxk
!�
A "B
B�ABA
� B�ABA
kSk kxk�
With kSk � B� we �nally obtain
kRk �BA�
AB"
kxk� �

A��� SIGNAL EXPANSIONS �
We can also see that the reconstruction error is small when B � A� Thus� for
snug frames x��n� gives a good approximation of x�n�� For tight frames� kRk ! ��
x�n� ! x��n�� and �A���� is valid�
We shall now formulate an iterative algorithm for the reconstruction of the signal x�n�
from its expansion coe�cients hx� gki ����� This algorithm is known to converge slowly�
Better algorithms were recently proposed in �����
Corollary A��� Let fgk�n�g be a frame for the Hilbert space H with frame
bounds A and B� Then every signal x�n� � H can be reconstructed from
the coe�cients hx� gki� k � K by the recursion
xl�n� ! xl���n� "�
A"B�S�x� xl�����n�� l � �A����
initialized by x��n� ! �� That is� x�n� ! liml�� xl�n� with the error bound
kx� xlk � B � A
B " A
�lkxk�
The information needed for the iterative reconstruction of the signal x�n� is �Sx��n� !Pkhx� gkigk�n�� This requires the knowledge of the expansion coe�cients hx� gki and the
frame functions gk�n�� We shall now give the proof of Corollary A���
Proof ����� From �A��� we know that!!!!I � �
A"BS
!!!! � B � A
B " A� �
Using �A���� we can write
x�n�� xl�n� ! x�n�� xl���n�� �
A"B�S�x� xl�����n�
! I � �
A"BS
��x� xl���
��n��
Iterating this recursion gives
x�n�� xl�n� !
� I � �
A"BS
�l�x� x��
��n��
Taking the norm yields
kx� xlk �!!!!! I � �
A "BS
�l!!!!! kx� x�k
�!!!!I � �
A"BS
!!!!l kx� x�k�With �A��� and x��n� ! � it follows that
kx� xlk � B � A
B " A
�lkxk� �A����
Since B�ABA
� � �A���� guarantees convergence of the sequence xl�n� towards x�n� as
l � �� �

�� APPENDIX A� THE THEORY OF FRAMES
A�� Exact Frames and Biorthogonality
A set of functions fgk�n�g is complete in a Hilbert space H if hx� gki ! � for all k � K
and for x�n� � H implies x�n� ! �� i�e�� the only function in H which is orthogonal to
every gk�n� is x�n� ! �� Every x�n� � H can be expanded into a complete set fgk�n�g�Obviously� frames are complete sets of functions �cf� �A���� and �A������ On the other
hand� the coe�cients ck occurring in the expansion x�n� !P
k ckgk�n� need not be
unique� Frames yielding unique coe�cients are called exact� A frame fgk�n�g for a
separable Hilbert space H is exact if and only if it is a Riesz basis ����� We shall call a
frame �inexact� if the removal of an arbitrary frame signal gm�n� leaves a set fgk�n�gk ��mthat is again a frame�
De�nition A��� Frames fgk�n�g which become incomplete sets when an
arbitrary function gm�n� is removed are called exact�
In Section A��� we shall show that the expansion of a signal into an exact frame is unique
�i�e�� the expansion coe�cients are unique�� In order to give a condition under which
a frame is exact� we need two lemmas� The �rst lemma states that among all possible
expansion coe�cient sequences ck satisfying x�n� !P
k ck#gk�n�� the frame coe�cients
ck ! hx� gki have minimum l� norm or� equivalently� that among all possible expansion
coe�cient sequences ck satisfying x�n� !P
k ckgk�n�� the frame coe�cients ck ! hx� #gkihave minimum l� norm�
Lemma A�� ����� Given a frame fgk�n�g and given x�n� � H� let ak !
hx� #gki so that x�n� !P
k ak gk�n�� If it is possible to �nd other scalars ck
such that x�n� !P
k ck gk�n�� then we must have
Xk
jckj� !Xk
jakj� "Xk
jak � ckj�� �A����
Note that this impliesP
k jckj� �P
k jakj�� i�e�� the coe�cients ck have larger l� norm�
This statement will be reconsidered from a di�erent point of view in Section A� �
Proof ����� We have
ak ! hx� #gki ! hx�S��gki ! hS��x� gki ! h#x� gki
with #x�n� ! �S��x��n�� Therefore�
hx� #xi !DX
k
akgk� #xE!Xk
akhgk� #xi !Xk
aka�k !
Xk
jakj�
and
hx� #xi !DX
k
ckgk� #xE!Xk
ckhgk� #xi !Xk
cka�k�

A��� EXACT FRAMES AND BIORTHOGONALITY �
We conclude that Xk
jakj� !Xk
cka�k !
Xk
c�kak� �A����
Hence�
Xk
jakj� "Xk
jak � ckj� !Xk
jakj� "Xk
�ak � ck��a�k � c�k�
!Xk
jakj� "Xk
jakj� �Xk
akc�k �
Xk
a�kck "Xk
jckj��
Using �A���� we get
Xk
jakj� "Xk
jak � ckj� !Xk
jckj�� � �A����
Lemma A�� ����� Let fgk�n�g be a frame� Then for each m we have
Xk ��m
jhgm� #gkij� !� jhgm� #gmij� � j� hgm� #gmij�
��
Proof ����� There is obviously gm�n� !P
k ckgk�n�� where cm ! and ck ! � for k ! m�
so thatP
k jckj� ! � Furthermore let ak ! hgm� #gki� Eq� �A���� yields
!Xk
jckj� !Xk
jakj� "Xk
jak � ckj�
!Xk
jakj� " jam � cmj� "Xk ��m
jak � ckj�
!Xk
jhgm� #gkij� " jhgm� #gmi � j� " Xk ��m
jhgm� #gkij�
! �Xk ��m
jhgm� #gkij� " jhgm� #gmij� " j� hgm� #gmij�
and hence Xk ��m
jhgm� #gkij� !� jhgm� #gmij� � j� hgm� #gmij�
�� �
We are now able to formulate a condition for a frame to be exact�
Theorem A�� ����� The removal of a function gm�n� from a frame fgk�n�gleaves either a frame or an incomplete set� In fact�
hgm� #gmi ! for arbitrary m � fgk�n�g is exact
hgm� #gmi ! for arbitrary m � fgk�n�g is inexact�

�� APPENDIX A� THE THEORY OF FRAMES
Proof ����� We �rst show that hgm� #gmi ! implies that fgk�n�gk ��m is incomplete and
hence fgk�n�g is an exact frame� From Lemma A�� we have
Xk ��m
jhgm� #gkij� ! � jhgm� #gmij� � j� hgm� #gmij��
�
Suppose now that hgm� #gmi ! � ThenP
k ��m jhgm� #gkij� ! �� so hgm� #gki ! h#gm� gki ! �
for k ! m� That is� #gm�n� is orthogonal to gk�n� for every k ! m� But #gm�n� ! � since
h#gm� gmi ! � Therefore fgk�n�gk ��m is incomplete� because #gm�n� is orthogonal to every
function of the family fgk�n�gk ��m�We next show that hgm� #gmi ! implies that fgk�n�gk ��m is still a frame� We can
always write
gm�n� !Xk
hgm� #gkigk�n� ! hgm� #gmigm�n� "Xk ��m
hgm� #gkigk�n��
If hgm� #gmi ! � this can be written as
gm�n� !
� hgm� #gmiXk ��m
hgm� #gkigk�n��
and for x�n� � H we have
jhx� gmij� !
�����
� hgm� #gmi
������������Xk ��m
hgm� #gkihx� gki�������
�
j� hgm� #gmij���Xk ��m
jhgm� #gkij�����Xk ��m
jhx� gkij��� �
Therefore
Xk
jhx� gkij� ! jhx� gmij� "Xk ��m
jhx� gkij�
�
j� hgm� #gmij���Xk ��m
jhgm� #gkij�����Xk ��m
jhx� gkij��� " X
k ��mjhx� gkij�
!Xk ��m
jhx� gkij��� "
j� hgm� #gmij�Xk ��m
jhgm� #gkij���
! CXk ��m
jhx� gkij�
or equivalently
C
Xk
jhx� gkij� �Xk ��m
jhx� gkij�
with
C ! "
j� hgm� #gmij�Xk ��m
jhgm� #gkij��

A��� EXACT FRAMES AND BIORTHOGONALITY ��
With �A��� it follows that
A
Ckxk� �
C
Xk
jhx� gkij� �Xk ��m
jhx� gkij� �Xk
jhx� gkij� � Bkxk��
so fgk�n�gk ��m is a frame with bounds AC� B�
To see that� conversely� an exact fgk�n�g implies that hgm� #gmi ! for arbitrarym� we
suppose that fgk�n�g is exact and hgm� #gmi ! � But the condition hgm� #gmi ! implies
that fgk�n�g is inexact� which is a contradiction� It remains to show that an inexact
fgk�n�g implies hgm� #gmi ! for allm� Suppose that fgk�n�g is inexact and hgm� #gmi ! �
The condition hgm� #gmi ! implies that fgk�n�g is exact� which is a contradiction� �
Corollary A� ����� If fgk�n�g is an exact frame� then fgk�n�g and f#gk�n�gare biorthogonal� i�e��
hgm� #gki ! �mk !
��� � if k ! m
�� if k ! m�
Conversely� if fgk�n�g and f#gk�n�g are biorthogonal� then fgk�n�g is exact�
Proof ����� If fgk�n�g is exact� then by Theorem A� we must have hgm� #gmi ! for every
m� and hence by Lemma A�� we haveP
k ��m jhgm� #gkij� ! � and thus also hgm� #gki ! �
for all k ! m� as claimed� It remains to show that� conversely� the biorthogonality of
fgk�n�g and f#gk�n�g implies that the frame fgk�n�g is exact� For biorthogonal functions
gk�n� and #gk�n� we have hgm� #gki ! �mk and hence hgm� #gmi ! for allm� So by Theorem
A� we conclude that fgk�n�g is exact� �
Corollary A��� A frame fgk�n�g is exact if and only if the dual frame
f#gk�n�g is exact�
Proof� This follows immediately from Corollary A�� and the symmetry inherent in the
inner product hgm� #gki� �
The next theorem establishes bounds on the energy of gk�n��
Theorem A��� ����� Let fgk�n�g be a frame with bounds A�B� Then
kgkk� � B�
Furthermore if fgk�n�g is exact� then
kgkk� � A�

�� APPENDIX A� THE THEORY OF FRAMES
Proof �����
� For m �xed we have
kgmk� ! jhgm� gmij� � jhgm� gmij� "Xk ��m
jhgm� gkij�
!Xk
jhgm� gkij� � Bkgmk��
so kgmk� � B�
�� If fgk�n�g is an exact frame� then by Corollary A�� fgk�n�g and f#gk�n�g are
biorthogonal� Therefore� for m �xed we have
Ak#gmk� �Xk
jh#gm� gkij� ! jh#gm� gmij� � k#gmk�kgmk��
so kgmk� � A� �
A�� Frames and Bases
We shall now give some results about the relation between frames and bases� The
central result is that an exact frame is a basis� i�e�� the expansion of a signal into an
exact frame is unique� We �rst give three de�nitions�
De�nition A� � A set of signals fgk�n�g in a Hilbert space H is a basis for
H if for every x�n� � H there exist unique scalars ck such that
x�n� !Xk
ck gk�n��
De�nition A��� A basis gk�n� in a Hilbert space H is bounded if � �
infkkgkk � supkkgkk �� for every k�
De�nition A��� ����� A basis fgk�n�g in a Hilbert space H is unconditional
if the seriesPkck gk�n� converges unconditionally� that is� every permutation
of the series converges �to the same limit��
We are now able to state
Theorem A��� ����� A set of signals fgk�n�g in a Hilbert space H is an
exact frame for H if and only if it is a bounded unconditional basis for H�

A��� FRAMES AND BASES ��
Proof ����� Assume that fgk�n�g is an exact frame with bounds A�B� Then from
Theorem A�� we have
kgkk� � A and kgkk� � B�
We have thus shown that the set of signals fgk�n�g is bounded in the sense of De�nition
A�� By Theorem A�� we have
x�n� !Xk
ckgk�n� with ck ! hx� #gki
for any x�n� � H� We now have to prove that this representation is unique� Assume
that there is a representation of the form x�n� !Pkak gk�n� with ak ! ck� Then�
cl ! hx� #gli !DX
k
akgk� #glE!Xk
ak hgk� #gli ! al
where we have used the biorthogonality of fgk�n�g and f#gk�n�g� So it follows that
al ! cl and we conclude that the representation is unique� Thus fgk�n�g is a basis for
H� and since every permutation of a frame is also a frame� we conclude that the basis
is unconditional� We have shown that the exactness of fgk�n�g implies that fgk�n�g is a
bounded unconditional basis�
It remains to prove that the converse is also true� Assume that fgk�n�g is a bounded
unconditional basis for H� In Hilbert spaces� all bounded unconditional bases are equiv�
alent to orthonormal bases� in the sense that if fgk�n�g is a bounded unconditional
basis� then there exists an orthonormal basis fek�n�g and a topological isomorphism�
U � H � H such that gk�n� ! �Uek��n� for all k ���� ���� Given x�n� � H� we
therefore have
Xk
jhx� gkij� !Xk
jhx�Uekij� !Xk
jhU �x� ekij� ! kU �xk� �
But on the other hand
kxk ! kIxk !!!!U ���
U�x!!! � !!!U ���
!!! kU �xk �
which implies thatkxk!!!U ���
!!! � kU �xk
and hencekxk�!!!U ���
!!!� � kU �xk� !Xk
jhx� gkij��
A topological isomorphism is a continuous linear transformation of H onto H such that the inverse
transformation exists and is continuous�

�� APPENDIX A� THE THEORY OF FRAMES
Furthermore we have
Xk
jhx� gkij� ! kU �xk� � kU �k� kxk� ! kUk� kxk��
Thus� fgk�n�g is a frame with frame bounds
A !!!!U ���!!!� and B ! kUk� �
It is clearly exact since the removal of any vector from a basis leaves an incomplete
set� �
Theorem A��� ����� Inexact frames are not bases�
Thus� inexact frames allow to expand any signal x�n� � H as x�n� !P
k ck gk�n� but the
expansion coe�cients ck are not unique� In fact� inexact frames are overcomplete in the
sense that there is redundancy in the expansion coe�cients�
Proof ����� Assume that fgk�n�g is an inexact frame� Then fgk�n�gk ��m is a frame
for some m� By Theorem A�� we have gm�n� !Pkak gk�n� ! am gm�n� "
Pk ��m ak gk�n��
where ak ! hgm� #gki� But we also have gm�n� !Pkck gk�n�� where ck ! for k ! m and
ck ! � for k ! m� By Theorem A� we must have am ! hgm� #gmi ! � i�e�� am ! cm�
Thus we have two di�erent representations for gm�n� in terms of fgk�n�g� and hence
fgk�n�g is not a basis� �
Theorem A���� A frame is tight �with frame bound A� and exact if and
only if it is an orthogonal basis �with kgkk� ! A��
Proof� For an exact frame we have hgk� #gmi ! �km� If the frame is tight we have
#gk�n� !�Agk�n�� Thus we conclude that hgk� gmi ! A�km� which proves that fgk�n�g is
an orthogonal basis with kgkk� ! A� To see that the converse is also true� one has to
recall that every orthogonal basis with hgk� gmi ! A�km is a tight frame with frame
bound A ! B� Thus we have #gk�n� !�Agk�n� and we obtain the biorthogonality relation
hgk� #gmi ! �km which implies the exactness of the frame� �
In the proof of Theorem A�� we have shown that an exact frame fgk�n�g yields
unique expansion coe�cients� In �nite�dimensional spaces H� this property is equivalent
to the linear independence of the frame functions� For an inexact frame the expansion
coe�cients are not unique� In a �nite�dimensional space H� this means that the frame
functions are linearly dependent�

A�� TRANSFORMATION OF FRAMES ��
A� Transformation of Frames
We shall next characterize frame�preserving mappings�� Starting from a frame fgk�n�gfor a space H�� we want to �nd frames fhk�n�g for some other space H�� One possible
approach is to construct a set of functions hk�n� ! �Ugk��n�� where U is a bounded�
linear operator from H� into H� with RanfUg ! H�� The following theorem states a
necessary and su�cient condition on the operator U in order for fhk�n�g to be a frame�
Theorem A�� ������ Let fgk�n�g be a frame forH� with bounds A�B� Let
U be a bounded� linear operator mappingH� onto H� �i�e�� with RanfUg !H��� Then fhk�n�g ! f�Ugk��n�g is a frame for H� if and only if the adjoint
operator U � is bounded below� i�e�� if there exists a positive constant � such
that the adjoint operator U � satis�es
kU �yk� � �kyk� � y�n� � H�� �A����
Frame bounds for fhk�n�g are given by C ! �A and D ! BkUk��
Proof ������ We �rst prove that �A���� is a su�cient condition� Given y�n� � H�� we
have �U �y��n� � H� and thus� by �A����
Xk
jhy�Ugkij� !Xk
jhU �y� gkij� � AkU �yk� � �Akyk� � y�n� � H��
So we have found a lower frame bound C ! �A for f�Ugk��n�g� The next step is to
derive an upper frame bound for f�Ugk��n�g� From �A��� we have
Xk
jhy�Ugkij� !Xk
jhU �y� gkij� � BkU �yk�
� BkU �k�kyk� ! BkUk�kyk� � y�n� � H��
where the last equation follows from the fact that kU �k ! kUk� We conclude that an
upper frame bound is D ! BkUk�� which completes the proof of the su�ciency�
We shall next prove that �A���� is a necessary condition� Assume that f�Ugk��n�g is
a frame for H� with lower frame bound C�
Ckyk� �Xk
jhy�Ugkij� � y�n� � H��
Again using �A���� it follows that
Ckyk� �Xk
jhy�Ugkij� !Xk
jhU �y� gkij� � BkU �yk�
The results of this section have mostly been taken from ������ However� we also present extensions
of the results given there�

� APPENDIX A� THE THEORY OF FRAMES
where B is the upper frame bound of fgk�n�g� and hence
kU �yk� � C
Bkyk��
which is �A���� with � ! CB� The constant � is greater than zero because B ��� �
Corollary A�� If fgk�n�g is a frame for H�� U maps H� into H�� and
fhk�n�g ! f�Ugk��n�g is a frame for H�� then the frame operator Sh of
fhk�n�g is
Sh ! USU ��
where S is the frame operator of fgk�n�g� Furthermore if U is an invertible
mapping of H� onto H�� the dual frame f#hk�n�g is given by
#hk�n� ! U���
#gk�n��
Proof� We �rst show that the frame operator of fhk�n�g can be expressed as Sh !
USU� �
�Shx��n� !Xk
hx� hki hk�n� !Xk
hx�Ugki �Ugk��n�
!Xk
hU �x� gki�Ugk��n� !
�UXk
hU �x� gki gk��n�
! �USU �x��n��
Furthermore we have to show that f#hk�n�g ! fU ���
gk�n�g for U invertible� Using the
previous result about the frame operator Sh� we obtain �note that the invertibility of
U implies that of U ��
#hk�n� ! �S��h hk��n� ! �S��h U gk��n� !��USU ����U gk
��n�
! �U ���
S��U��U gk��n� ! �U ���
#gk��n��
where S is the frame operator of fgk�n�g� �
An important special case is an operator U that is unitary� i�e�� U ���
! U � In that
case we have#hk�n� ! �U #gk��n��
i�e�� the dual frames f#gk�n�g and f#hk�n�g are related by the same mapping �namely� U�
as the frames gk�n� and hk�n��
We shall now discuss a frame�preserving mapping of particular importance� namely
U ! S����� which maps H� onto H� �i�e�� H� ! H��� Here S���� denotes the positive
de�nite operator square root of S���

A�� TRANSFORMATION OF FRAMES �
Corollary A�� ����� Let fgk�n�g be a frame for H� with frame operator S�
Then f�S����gk��n�g is a tight frame for H with A ! � Moreover if fgk�n�gis exact� then f�S����gk��n�g is an orthonormal basis for H�
Proof ����� We know from Theorem A�� that f�S����gk��n�g is a frame if and only if
kS�����xk� � �kxk� with � � �� We shall �rst show that kS�����xk� ! kS����xk� � ��
This follows from �Bkxk� � hS��x� xi ! hS����x�S����xi ! kS����xk�� where we have
used the fact that S���� is self�adjoint� We are now able to show that f�S����gk��n�gis tight with A ! � According to Corollary A��� we have to show that
x�n� !Xk
hx�S����gki �S����gk��n��
Indeed� the right�hand side of this equation is
Xk
hx�S����gki�S����gk��n� ! S����X
k
hS����x� gki gk�n�
! �S����SS����x��n� ! �Ix��n� ! x�n��
For the proof of the second statement� we have to consider the inner product
hS����gk�S����gmi ! hgk�S��gmi ! hgk� #gmi�
Since fgk�n�g is exact we have
hgk� #gmi ! �mk�
and hence we conclude that f�S����gk��n�g is an orthonormal basis for H� �
We shall next ask whether the orthogonal projection of a frame fgk�n�g for H into a
subspace H� � H yields a frame for H�� The following theorem gives an answer�
Theorem A��� ������ Let H� � H be a subspace of H� Let fgk�n�g be
a frame for H and f#gk�n�g the dual frame� Let P denote the orthogonal
projection operator from H into H�� Then f�P gk��n�g and f�P #gk��n�g are
dual in H� �not necessarily dual frames�� Moreover� the frame bounds A
and B of fgk�n�g are also frame bounds for f�P gk��n�g�
Proof ����� The orthogonal projection operator P satis�es
kP �yk ! kP yk� ! kyk� � y�n� � H��
We thus have the conditions of Theorem A�� with � ! � It follows that f�P gk��n�g is
a frame for H�� We can furthermore write x�n� in terms of the frame fgk�n�g�
x�n� !Xk
hx� #gki gk�n��

� APPENDIX A� THE THEORY OF FRAMES
Furthermore we use the fact that y�n� ! �P y��n� for y�n� � H� to obtain
y�n� ! �P y��n� !Xk
hP y� #gki gk�n� !Xk
hy�P #gki gk�n�� � y�n� � H�
and further
y�n� ! �P y��n� !
�PXk
hy�P #gki gk��n� !
Xk
hy�P #gki�P gk��n� � y�n� � H��
From this equation� it follows that f�P gk��n�g and f�P #gk��n�g are dual in H�� Note
that this does not necessarily mean that f�P gk��n�g and f�P #gk��n�g are dual frames
in H�� Pure duality only means that the corresponding dual sets will provide perfect
reconstruction�
To complete the proof� we have to show that the frame bounds of fgk�n�g are also
frame bounds of f�P gk��n�g� Since H� � H� it follows from �A��� that
Akyk� �Xk
jhy� gkij� � Bkyk� � y�n� � H��
Furthermore y�n� ! �P y��n� for all y�n� � H� and hence
Akyk� �Xk
jhP y� gkij� � Bkyk�� � y�n� � H��
which implies that
Akyk� �Xk
jhy�P gkij� � Bkyk� � y�n� � H�� �
A�� Frames and Pseudoinverses
Consider an inexact frame fgk�n�g for the Hilbert space H� Due to Theorem A��� any
signal x�n� � H can be represented as x�n� !P
k hx� #gki gk�n�� where f#gk�n�g is the dual
frame� A consequence of the �overcompleteness� of an inexact frame fgk�n�g is that the�frame coe�cients� hx� #gki do not constitute the only sequence ck satisfying
Xk
ck gk�n� ! x�n�� �A�� �
However� Lemma A� states that the coe�cients ak ! hx� #gki have minimum norm
among all possible sequences ck� We shall now consider this property from a di�erent
point of view�
Let us reformulate the problem� We consider the operator T � �De�nition A��� which
acts on a sequence ck � l��ZZ� as
�T �c��n� !Xk
ck gk�n��

A� � FRAMES AND THE GRAM MATRIX
Due to �A�� �� the coe�cients ck satisfy the linear equation
�T �c��n� ! x�n��
As stated further above� it follows from the inexactness of the frame fgk�n�g that this
equation has more than one solution ck� Hence� the equation T �c ! x is underdeter�
mined� Accordingly one may be interested in the solution ak with minimum norm�
i�e��
ak ! argminckkckk�
According to �� � �pp� ������ this sequence is given by the pseudoinverse �T ��y !
T �T �T ��� of the operator T ��
ak ! �T ��yx ! T �T �T ���x ! TS��x ! �Tx�
Thus� the operator �T ! TS�� considered in Theorem A��� assigning to each signal x�n�
the coe�cient sequence ak ! � �Tx�k ! hx� #gki� is the pseudoinverse of T � which assigns
to each signal x�n� � H the coe�cient sequence with minum norm�
�T ! TS�� ! �T ��y�
We �nally note that the relation between frames and pseudo�inverses has been elab�
orated in �� � �� ����
A�� Frames and the Gram Matrix
The Gram matrix G of a set of signals fgk�n�g is a Hermitian� positive semide�nite
matrix whose elements are the inner products of the signals gk�n��
Gik ! hgi� gki�Given a frame fgk�n�g� consider the operator TT � mapping l��ZZ� into l��ZZ� according
to
�TT �c�k !
�TXl
clgl�n�
�k
!DX
l
clgl� gkE
!Xl
clhgl� gki !Xl
Glkcl !Xl
�GT �kl cl ! �GT c�k�
We thus have shown
Lemma A��� The operator
TT� � l��ZZ�� l��ZZ�
�TT �c�k !Xl
hgl� gki cl
is equal to the transposed Gram matrix of the frame fgk�n�g�TT
� ! GT �

� APPENDIX A� THE THEORY OF FRAMES
The following theorem relates the eigenvalues and eigenfuntions of the frame operator
S to the eigenvalues and eigenvectors of the Gram matrix G�
Theorem A��� The eigenvalues of the frame operator S ! T�T are the
same as the nonzero eigenvalues of the Gram matrix G� The eigenfunctions
u�n� of the frame operator S are related to the eigenvectors v of the Gram
matrix G according to
�v�k ! hu� gki�� k � K�
where �v�k denotes the kth component of the eigenvector v�
Proof� Let � � and u�n� be an eigenvalue and eigenfunction� respectively� of the
frame operator S� From the eigenequation of S�
�Su��n� ! u�n��
we obtain
hSu� gki ! hu� gki� �A���
On the other hand�
hSu� gki !DX
l
hu� gli gl� gkE!Xl
hu� glihgl� gki
!Xl
hgk� gli�hu� gli !Xl
G�kl hu� gli�
Combining with �A��� yields
Xl
Gkl hu� gli� ! � hu� gki��
De�ning the vector v with components �v�k ! hu� gki�� and using the fact that � !
due to the self�adjointness of S� this can be written as
Gv ! v�
which shows that and v are an eigenvalue and eigenvector� respectively� of the Gram
matrix� �
The rank of the frame operator S �which equals the dimension of H� equals the
number of nonzero eigenvalues of the Gram matrix G�

A���� EXAMPLES �
�a�
x�
x�
g�
g�g�
g�
x�
x�
g�
g� g�
�b�
Fig� ��� a Frame for IR�� b tight frame for IR��
A��� Examples
In order to illustrate the theory of frames discussed so far� we shall now give two
examples� For simplicity� we consider vectors x � IR� instead of signals x�n�� The
underlying Hilbert space H is two�dimensional �the plane IR���
Example �� The four vectors
g� !
"#
�
$A � g� !
"# �
$A � g� !
"# �
$A � g� !
"# ����
$A
depicted in Fig� ���a� constitute a frame for IR�� Note that this frame consists of an
orthonormal basis �g� and g�� augmented by two vectors g�� g� which are obviously
linearly dependent with respect to g�� g�� Thus� this frame is inexact�
The frame operator is a �� � matrix given by �cf� �A����
S !�X
k��
gkgHk !
"# � ������ ��
$A �
where ghH denotes the outer �dyadic� product of the vectors g and h� The tightest
frame bounds are obtained as the minimum and the maximum of the eigenvalues of the
matrix S� which are
A ! min ! �� B ! max !�
��
The inverse frame operator �matrix� is obtained by inverting the matrix S�
S�� !
��
"# �
� �
$A �

� APPENDIX A� THE THEORY OF FRAMES
The dual frame f#gkg is obtained by applying the inverse frame operator to the vectors
gk�
#g� ! S��g� !
��
"#
�
$A � #g� ! S
��g� !
��
"# �
�
$A �
#g� ! S��g� !
��
"# ��
�
$A � #g� ! S
��g� !
��
"# ���
$A �
Any vector x � IR� can be reconstructed from the expansion coe�cients hx� #gki ! #gTk x
as
x !�X
k��
hx� #gki gk�
Example � ��� We shall now consider a tight frame for IR�� The frame vectors are
g� !
"# �
$A � g� !
"# �p���
���
$A � g� !
"# p
���
���
$A
�see Fig� ���b��� Obviously� these vectors must be linearly dependent� and thus the
frame is again inexact� The frame operator is given by
S !�
�I��
where I� is the � � � identity matrix� The frame bounds are A ! B ! ��� Since the
frame vectors all have length � the frame bound ��can be interpreted as a �redundancy
factor� �we have � vectors in a ��dimensional space�� The inverse frame operator is
given by
S�� !
�
�I��
and the dual frame vectors are #gk !��gk�

Appendix B
MultiChannel Levinson Algorithm
In this appendix we provide a detailed derivation of the multi�channel Levinson al�
gorithm� which is sometimes also referred to as Levinson�Wiggins�Robinson algorithm
����� The discussion essentially follows the presentation in ����
The multi�channel Levinson algorithm allows an e�cient recursive solution of the the
multi�channel Yule�Walker equations
��������
Cx��� Cx�� ��� Cx�L� �
Cx��� Cx��� ��� Cx�L� �����
������
���
Cx���L� �� Cx���L� ��� ��� Cx���
��������
��������
GT�
GT����
GTL
�������� !
��������
CTx ��
CTx ������
CTx �L�
�������� � �B��
where the N � N matrices Cx�k� ! Efx�n�xH �n�k�g are the correlation matrices of the
N � vector process x�n� to be predicted� The N � N predictor coe�cient matrices
are denoted by Gl �l ! � �� ���� L��
In the following we shall use both forward and backward linear predictors� The L�th
order forward linear predictor is de�ned according to
xf �n� !LXl��
Gfl x�n� l��
The corresponding multi�channel Yule�Walker equations are
LXl��
Cx�l � k�GfT
l ! CTx �k�� k ! � �� ���� L� �B���
which is equivalent to �B�� except that we have written Gfl instead of Gl� The forward
prediction error power matrix is de�ned as
�f �! Cx����
LXl��
Cx�l�GfT
l � �B���
�
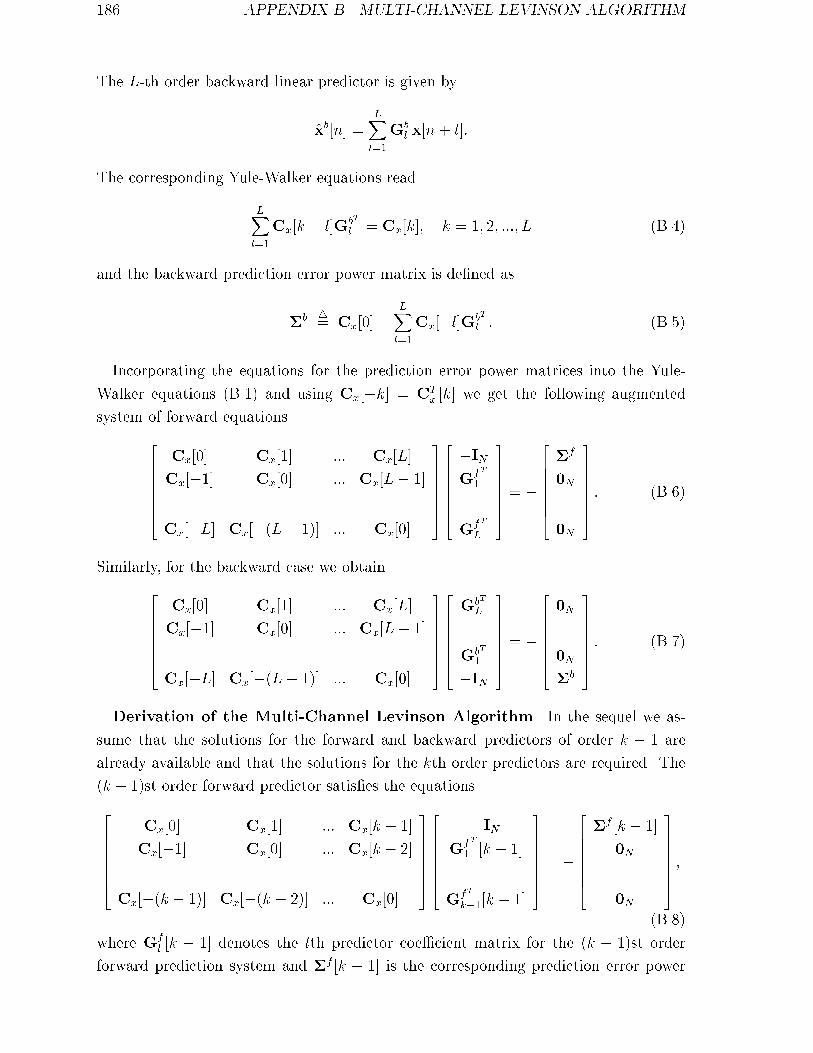
� APPENDIX B� MULTICHANNEL LEVINSON ALGORITHM
The L�th order backward linear predictor is given by
xb�n� !LXl��
Gbl x�n " l��
The corresponding Yule�Walker equations read
LXl��
Cx�k � l�GbT
l ! Cx�k�� k ! � �� ���� L �B���
and the backward prediction error power matrix is de�ned as
�b �! Cx����
LXl��
Cx��l�GbT
l � �B���
Incorporating the equations for the prediction error power matrices into the Yule�
Walker equations �B�� and using Cx��k� ! CTx �k� we get the following augmented
system of forward equations
��������
Cx��� Cx�� ��� Cx�L�
Cx��� Cx��� ��� Cx�L� ����
������
���
Cx��L� Cx���L� �� ��� Cx���
��������
��������
�INGfT
����
GfT
L
�������� ! �
��������
�f
�N���
�N
�������� � �B���
Similarly� for the backward case we obtain
��������
Cx��� Cx�� ��� Cx�L�
Cx��� Cx��� ��� Cx�L� ����
������
���
Cx��L� Cx���L� �� ��� Cx���
��������
��������
GbT
L���
GbT
�
�IN
�������� ! �
��������
�N���
�N
�b
�������� � �B���
Derivation of the Multi�Channel Levinson Algorithm� In the sequel we as�
sume that the solutions for the forward and backward predictors of order k � are
already available and that the solutions for the kth order predictors are required� The
�k � �st order forward predictor satis�es the equations
��������
Cx��� Cx�� ��� Cx�k � �
Cx��� Cx��� ��� Cx�k � �����
������
���
Cx���k � �� Cx���k � ��� ��� Cx���
��������
��������
�INGfT
� �k � ����
GfT
k���k � �
�������� ! �
��������
�f �k � �
�N���
�N
�������� �
�B� �
where Gfl �k � � denotes the lth predictor coe�cient matrix for the �k � �st order
forward prediction system and �f �k � � is the corresponding prediction error power

APPENDIX B� MULTICHANNEL LEVINSON ALGORITHM �
matrix� The �k � �st order backward predictor satis�es
��������
Cx��� Cx�� ��� Cx�k � �
Cx��� Cx��� ��� Cx�k � �����
������
���
Cx���k � �� Cx���k � ��� ��� Cx���
��������
��������
GbT
k���k � ����
GbT
� �k � �
�IN
�������� ! �
��������
�N���
�N
�b�k � �
��������
�B��
with Gbl �k � � denoting the lth predictor coe�cient matrix for the �k � �st order
backward prediction system and �b�k � � denoting the corresponding prediction error
power matrix�
Enlarging the dimension of the forward equations by one we obtain
��������
Cx��� Cx�� ��� Cx�k�
Cx��� Cx��� ��� Cx�k � ����
������
���
Cx��k� Cx���k � �� ��� Cx���
��������
�����������
�INGfT
� �k � ����
GfT
k���k � �
�N
�����������! �
��������
�f �k � ����
�N
�f �k�
���������B���
with
�f �k� ! �k��Xl��
Cx�l � k�GfT
l �k � �� �B��
where GfT
� �k � ��! �IN � Enlarging the system of backward equations by one
dimension we get
��������
Cx��� Cx�� ��� Cx�k�
Cx��� Cx��� ��� Cx�k � ����
������
���
Cx��k� Cx���k � �� ��� Cx���
��������
�����������
�N
GbT
k���k � ����
GbT
� �k � �
�IN
�����������! �
�����������
�b�k�
�N���
�N
�b�k � �
�����������
�B���
with
�b�k� ! �k��Xl��
Cx�k � l�GbT
l �k � ��
where GbT
� �k � ��! �IN �
Multiplying the backward equations �B��� by the N � N forward re�ection coe��
cient matrix KfT �k�� which still is to be determined� from the right and adding them to

APPENDIX B� MULTICHANNEL LEVINSON ALGORITHM
the forward equations �B��� yields
��������
Cx��� Cx�� ��� Cx�k�
Cx��� Cx��� ��� Cx�k � ����
������
���
Cx��k� Cx���k � �� ��� Cx���
��������
���������������������
�����������
�INGfT
� �k � ����
GfT
k���k � �
�N
�����������"
�����������
�N
GbT
k���k � ����
GbT
� �k � �
�IN
�����������KfT �k�
��������������������
!
�
�����������
�f �k � �
�N���
�N
�f �k�
������������
�����������
�b�k�
�N���
�N
�b�k � �
�����������KfT �k�� �B���
We shall now determine the forward re�ection coe�cient matrix KfT �k� in a way that
�B��� is equivalent to the augmented Yule�Walker equations for the kth order forward
predictor in �B���� We obtain the condition
�f �k� "�b�k � �KfT �k� ! �N
and consequently
KfT �k� ! ��b��
�k � ��f �k�� �B���
Furthermore� a comparison of the �rst equation in �B��� with the �rst equation in �B���
results in
�f �k� ! �f �k � � "�b�k�KfT �k�� �B���
Similarly� comparing the remaining equations in �B��� with the corresponding equations
in �B��� yields
Gfl �k� !
��� Gf
l �k � � "Kf �k�Gbk�l�k � � for l ! � �� ���� k �
�Kf �k� for l ! k��B���
Let us next generate the Yule�Walker equations for the k�th order backward predictor
in a similar fashion� Multiplying the augmented forward equations �B��� by the N �N
backward re�ection coe�cient matrix KbT �k� from the right and adding them to the
augmented backward equations �B��� yields
��������
Cx��� Cx�� ��� Cx�k�
Cx��� Cx��� ��� Cx�k � ����
������
���
Cx��k� Cx���k � �� ��� Cx���
��������
���������������������
�����������
�INGfT
� �k � ����
GfT
k���k � �
�N
�����������KbT �k� "
�����������
�N
GbT
k���k � ����
GbT
� �k � �
�IN
�����������
��������������������
!

APPENDIX B� MULTICHANNEL LEVINSON ALGORITHM
�
�����������
�f �k � �
�N���
�N
�f �k�
�����������KbT �k��
�����������
�b�k�
�N���
�N
�b�k � �
������������ �B���
These equations should represent the Yule�Walker equations for the k�th order backward
predictor� Proceeding as above one can see that this is the case if
�b�k� ! �b�k � � "�f �k�KbT �k� �B� �
KbT �k� ! ��f��
�k � ��b�k�� �B��
The corresponding predictor coe�cient matrices are consequently given by
Gbl �k� !
��� Gb
l �k � � "Kb�k�Gfk�l�k � � for l ! � �� ���� k �
�Kb�k� for l ! k��B����
Some simpli�cations to these equations are possible� It is shown in ��� that
�b�k� !�fT �k��
Hence� the multi�channel re�ection coe�cient matrices in �B��� and �B�� are given
by
KfT �k� ! ��b��
�k � ��f �k� �B���
KbT �k� ! ��f��
�k � ��fT �k�� �B����
Furthermore� inserting �B���� and �B��� in �B��� and �B� �� respectively� the predic�
tion error power matrices can be expressed as
�f �k� ! �f �k � ��IN �KbT �k�KfT �k�� �B����
�b�k� ! �b�k � ��IN �KfT �k�KbT �k��� �B����
The Multi�Channel Levinson Algorithm� The multi�channel Levinson algo�
rithm is initialized by �nding the solution for the �rst�order linear predictor� According
to �B�����B�����B����� and �B���� the �rst�order predictor coe�cient matrices are given
by
GfT
� �� ! �KfT �� ! C��x ���Cx��� �B����
GbT
� �� ! �KbT �� ! C��x ���Cx��� �B����
Using �f ��� ! Cx��� and �b��� ! Cx��� �see �B��� and �B���� respectively� in �B����
and �B����� the �rst order prediction error power matrices are given by
�f �� ! Cx����IN �KbT ��KfT ��� �B����
�b�� ! Cx����IN �KfT ��KbT ���� �B�� �
Finally� we can summarize the multi�channel Levinson algorithm as follows�

� APPENDIX B� MULTICHANNEL LEVINSON ALGORITHM
� Initialization�
GfT
� �� ! �KfT �� ! C��x ���Cx��� �B���
GbT
� �� ! �KbT �� ! C��x ���Cx�� �B����
�f �� ! Cx����IN �KbT ��KfT ��� �B���
�b�� ! Cx����IN �KfT ��KbT ���� �B����
For k ! �� �� ���� L�
� Re�ection coe�cient matrices see B���� B���� and B����
KfT �k� ! ��b��
�k � ��f �k� �B����
KbT �k� ! ��f��
�k � ��fT �k� �B����
�f �k� ! �k��Xl��
Cx�l � k�GfT
l �k � � �B����
� Predictor coe�cient matrices see B����B����
Gfl �k� !
��� Gf
l �k � � "Kf �k�Gbk�l�k � � for l ! � �� ���� k �
�Kf �k� for l ! k
Gbl �k� !
��� Gb
l �k � � "Kb�k�Gfk�l�k � � for l ! � �� ���� k �
�Kb�k� for l ! k�
� Prediction error power matrices see B����B����
�f �k� ! �f �k � ��IN �KbT �k�KfT �k�� �B����
�b�k� ! �b�k � ��IN �KfT �k�KbT �k��� �B����
� Finally� the solution to the multi�channel Yule�Walker equations is given by
Gl ! Gfl �L�� l ! � �� ���� L �B�� �
� ! �f �L�� �B���

Bibliography
��� M� Vetterli� �A theory of multirate lter banks� IEEE Trans� Acoust�� Speech� Signal
Processing� vol� ��� pp� �� ����� March �����
��� P� P� Vaidyanathan� �Theory and design ofM �channel maximally decimated quadraturemirror lters with arbitrary M � having perfect reconstruction property� IEEE Trans�
Acoust�� Speech� Signal Processing� vol� ��� pp� �� ����� April �����
��� P� P� Vaidyanathan� Multirate Systems and Filter Banks� Englewood Cli�s �NJ�� Pren�tice Hall� �����
��� M� Vetterli and J� Kova�cevi�c� Wavelets and Subband Coding� Englewood Cli�s �NJ��Prentice Hall� �����
��� A� N� Akansu and R� A� Haddad�Multiresolution Signal Decomposition� Academic Press������
� � G� Strang and T� Q� Nguyen� Wavelets and Filter Banks� Wellesley�Cambridge Press���� �
��� N� S� Jayant and P� Noll� Digital Coding of Waveforms� Englewood Cli�s �NJ�� PrenticeHall� �����
��� S� G� Mallat and Z� Zhang� �Matching pursuits and time�frequency dictionaries� IEEETrans� Signal Processing� vol� ��� pp� ���������� Dec� �����
��� I� Daubechies� �The wavelet transform� time�frequency localization and signal analysis�IEEE Trans� Inf� Theory� vol� � � pp� � ������� Sept� �����
���� I� Daubechies� Ten Lectures on Wavelets� SIAM� �����
���� H� G� Feichtinger and T� Strohmer� eds�� Gabor Analysis and Algorithms� Theory and
Applications� Boston �MA�� Birkh�auser� �����
���� M� J� Bastiaans� �Gabor�s expansion of a signal in gaussian elementary signals�Proc� IEEE� vol� �� pp� �������� April �����
���� A� J� E� M� Janssen� �Gabor representation of generalized functions� J� Math� Anal�
Appl�� vol� ��� pp� �������� �����
���� J� Wexler and S� Raz� �Discrete Gabor expansions� Signal Processing� vol� ��� pp� �������� �����
���� M� Zibulski and Y� Y� Zeevi� �Oversampling in the Gabor scheme� IEEE Trans� Signal
Processing� vol� ��� pp� � ���� ��� Aug� �����

� BIBLIOGRAPHY
�� � A� J� E� M� Janssen� �Duality and biorthogonality for Weyl�Heisenberg frames� J�
Fourier Analysis and Applications� vol� �� no� �� pp� ������ � �����
���� I� Daubechies� H� J� Landau� and Z� Landau� �Gabor time�frequency lattices and theWexler�Raz identity� J� Fourier Analysis and Applications� vol� �� no� �� pp� �������������
���� H� G� Feichtinger and K� Gr�ochenig� �Gabor wavelets and the Heisenberg group� Gaborexpansions and short time Fourier transform from the group theoretical point of view�in Wavelets � A Tutorial in Theory and Applications �C� Chui� ed��� pp� ��������Boston� Academic Press� �����
���� I� Daubechies� S� Ja�ard� and J� L� Journ�e� �A simple Wilson orthonormal basis withexponential decay� SIAM J� Math� Anal�� vol� ��� pp� �������� �����
���� H� G� Feichtinger� K� Gr�ochenig� and D� Walnut� �Wilson bases and modulation spaces�Math� Nachrichten� vol� ���� pp� ����� �����
���� P� Auscher� �Remarks on the local Fourier bases� inWavelets� Mathematics and Appli�
cations �J� J� Benedetto and M� W� Frazier� eds��� pp� �������� Boca Raton� FL� CRCPress� �����
���� H� B�olcskei� H� G� Feichtinger� K� Gr�ochenig� and F� Hlawatsch� �Discrete�time Wil�son expansions� in Proc� IEEE�SP Int� Sympos� Time�Frequency Time�Scale Analysis��Paris� France�� pp� �������� June ��� �
���� H� B�olcskei� K� Gr�ochenig� F� Hlawatsch� and H� G� Feichtinger� �Oversampled Wilsonexpansions� IEEE Signal Processing Letters� vol� �� pp� �� ����� April �����
���� R� R� Coifman and Y� Meyer� �Remarques sur l�analyse de fourier �a fen�etre� C� R�
Acad� Sci�� vol� �� no� ���� pp� ����� �� �����
���� A� Ron and Z� Shen� �Frames and stable bases for shift�invariant subspaces of L��Rd��
Canadian Journal of Mathematics� vol� ��� no� �� pp� ���������� �����
�� � A� J� E� M� Janssen� �Density theorems for lter banks� Tech� Rep� ���� PhilipsResearch Laboratories� Eindhoven� The Netherlands� April �����
���� A� J� E� M� Janssen� �The duality condition for Weyl�Heisenberg frames� in Gabor
Analysis and Algorithms� Theory and Applications �H� G� Feichtinger and T� Strohmer�eds��� pp� ������ Boston �MA�� Birkh�auser� �����
���� Y� F� Dehery� M� Lever� and P� Urcum� �A MUSICAM source codec for digital audiobroadcasting and storage� in Proc� ICASSP��� �Toronto� Canada�� pp� � ���� ��� May�����
���� G� K� Wallace� �The JPEG still picture compression standard� Communications of theACM� vol� ��� pp� ������ April �����
���� D� LeGall� �MPEG� A video compression standard for multimedia applications� Com�munications of the ACM� vol� ��� pp� � ���� April �����
���� R� N� J� Veldhuis� M� Breeuwer� and R� G� van der Wall� �Subband coding of digitalaudio signals� Philips J� Res�� vol� ��� pp� �������� �����

BIBLIOGRAPHY �
���� C� E� Heil and D� F� Walnut� �Continuous and discrete wavelet transforms� SIAM Rev��vol� ��� pp� ��� � Dec� �����
���� H� G� Feichtinger� �Coherent non�orthogonal expansions reencouraged� in Proceedingsof the �th Annual International Conference of the IEEE Engineering in Medicine and
Biology �N� F� Sheppard� M� Eden� and G� Kantor� eds��� pp� � a���a� Nov� �����
���� H� G� Feichtinger and K� Gr�ochenig� �Theory and practice of irregular sampling� inWavelets� Mathematics and Applications �J� J� Benedetto and M� W� Frazier� eds���pp� ����� �� Boca Raton� CRC Press� �����
���� Z� Cvetkovi�c and M� Vetterli� �Oversampled lter banks� IEEE Trans� Signal Process�
ing� to appear�
�� � H� B�olcskei� F� Hlawatsch� and H� G� Feichtinger� �Frame�theoretic analysis of oversam�pled lter banks� IEEE Trans� Signal Processing� submitted Feb� ��� �
���� H� B�olcskei� F� Hlawatsch� and H� G� Feichtinger� �Frame�theoretic analysis and designof oversampled lter banks� in Proc� IEEE ISCAS��� vol� �� �Atlanta �GA��� pp� �������� May ��� �
���� H� B�olcskei and F� Hlawatsch� �Oversampled lter banks� Optimal noise shaping� designfreedom� and noise analysis� in Proc� IEEE ICASSP��� vol� �� �Munich� Germany��pp� �������� � April �����
���� H� B�olcskei and F� Hlawatsch� �Oversampled cosine modulated lter banks with per�fect reconstruction� IEEE Trans� Circuits and Systems II� Special Issue on Multirate
Systems� Filter Banks� Wavelets� and Applications� to appear �����
���� H� B�olcskei and F� Hlawatsch� �Noise reduction in oversampled lter banks using pre�dictive quantization� IEEE Trans� Inf� Theory� ����� to be submitted�
���� J� C� Candy and G� C� Temes� Oversampling Delta�Sigma Data Converters� IEEE Press������
���� R� M� Gray� �Oversampled sigma�delta modulation� IEEE Trans� Comm�� vol� ���pp� �������� April �����
���� S� K� Tewksbury and R� W� Hallock� �Oversampled� linear predictive and noise�shapingcoder of order N��� IEEE Trans� Circuits and Systems� vol� ��� pp� �� ����� July�����
���� H� B�olcskei and F� Hlawatsch� �Oversampled modulated lter banks� in Gabor Analysisand Algorithms� Theory and Applications �H� G� Feichtinger and T� Strohmer� eds���ch� �� pp� �������� Boston� MA� Birkh�auser� �����
���� H� B�olcskei and F� Hlawatsch� �Oversampled cosine modulated lter banks with linearphase� in Proc� IEEE ISCAS��� �Hong Kong�� pp� ����� �� June �����
�� � H� B�olcskei and F� Hlawatsch� �Oversampled Wilson�type cosine modulated lter bankswith linear phase� in Proc� �� th Asilomar Conf� Signals� Systems� Computers� �PacicGrove� CA�� pp� ��������� Nov� ��� �
���� J� L� Mannos and D� J� Sakrison� �The e�ect of a visual delity criterion on the encodingof images� IEEE Trans� Inf� Theory� vol� ��� pp� ������ � July �����
� BIBLIOGRAPHY
���� H� B�olcskei� T� Stranz� F� Hlawatsch� and R� Sucher� �Subband image coding usingcosine modulated lter banks with perfect reconstruction and linear phase� in Proc�
IEEE ICIP��� vol� �� �Santa Barbara� CA�� pp� �������� Oct� �����
���� D� L� Donoho� �De�noising by soft�thresholding� IEEE Trans� Inf� Theory� vol� ���no� �� pp� ��� ��� �����
���� Z� Cvetkovi�c and M� Vetterli� �Discrete�time wavelet extrema representation� Designand consistent reconstruction� IEEE Trans� Signal Processing� vol� ��� pp� ��� ���March �����
���� J� S� Lim and A� V� Oppenheim� �Enhancement and bandwidth compression of noisyspeech� Proc� IEEE� vol� �� pp� ��� �� ��� Dec� �����
���� S� G� Chang� Z� Cvetkovi�c� and M� Vetterli� �Resolution enhancement of images usingwavelet transform extrema extrapolation� in Proc� IEEE ICASSP�� � vol� �� pp� ���������� �����
���� Z� Cvetkovi�c� Overcomplete expansions for digital signal processing� PhD thesis� Uni�versity of California� Berkeley� CA� Dec� �����
���� M� Sandell� Design and Analysis of Estimators for Multicarrier Modulation and Ultra�
sonic Imaging� PhD thesis� Lulea University of Technology� Lulea� Sweden� ��� �
���� H� B�olcskei� F� Hlawatsch� and H� G� Feichtinger� �Oversampled FIR and IIR DFT lterbanks and Weyl�Heisenberg frames� in Proc� IEEE ICASSP��� vol� �� �Atlanta� GA��pp� ���������� May ��� �
�� � R� A� Gopinath� �Modulated lter banks and wavelets � A unied theory� in Proc�
IEEE ICASSP��� �Atlanta� GA�� pp� ���������� May ��� �
���� T� Chen and P� P� Vaidyanathan� �Vector space framework for unication of one� andmultidimensional lter bank theory� IEEE Trans� Signal Processing� vol� ��� pp� ��� ������ Aug� �����
���� H� B�olcskei� F� Hlawatsch� and H� G� Feichtinger� �Equivalence of DFT lter banks andGabor expansions� in Proc� SPIE Wavelet Applications in Signal and Image Processing
III� vol� �� �� Part I� �San Diego �CA��� pp� �������� July �����
���� R� E� Crochiere and L� R� Rabiner� Multirate Digital Signal Processing� EnglewoodCli�s �NJ�� Prentice Hall� �����
� �� M� J� T� Smith and T� P� Barnwell� �A new lter bank theory for time�frequency repre�sentation� IEEE Trans� Acoust�� Speech� Signal Processing� vol� ��� pp� �������� March�����
� �� Y� Lin and P� P� Vaidyanathan� �Application of DFT lter banks and cosine modulatedlter banks in ltering� in Proc� APCCAS���� �Taipei� Taiwan�� pp� �������� �����
� �� R� N� J� Veldhuis� �A lter�notation for analysis�synthesis systems and its relation toframes� Tech� Rep� ���� Institute for Perception Research� The Netherlands� Sept������
� �� R� J� Du!n and A� C� Schae�er� �A class of nonharmonic Fourier series� Trans� Amer�Math� Soc�� vol� ��� pp� ����� � �����
BIBLIOGRAPHY �
� �� Z� Cvetkovi�c� �Oversampled modulated lter banks and tight Gabor frames in l��Z��in Proc� IEEE ICASSP�� � �Detroit �MI��� pp� ��� ������ May �����
� �� M� Vetterli and Z� Cvetkovi�c� �Oversampled FIR lter banks and frames in l��Z�� inProc� IEEE ICASSP��� vol� �� pp� ���������� May ��� �
� � T� Kailath� Linear Systems� Englewood Cli�s �NJ�� Prentice Hall� �����
� �� I� Gohberg� P� Lancaster� and L� Rodman� Matrix Polynomials� Academic Press� �����
� �� M� Zibulski and Y� Y� Zeevi� �Analysis of multiwindow Gabor�type schemes by framemethods� Applied and Computational Harmonic Analysis� vol� �� pp� �������� April�����
� �� N� J� Munch� �Noise reduction in tight Weyl�Heisenberg frames� IEEE Trans� Inf�
Theory� vol� ��� pp� ��� � � March �����
���� M� Vetterli and C� Herley� �Wavelets and lter banks� Theory and design� IEEE Trans�
Signal Processing� vol� ��� pp� ���������� Sept� �����
���� A� W� Naylor and G� R� Sell� Linear Operator Theory in Engineering and Science� NewYork� Springer� �nd ed�� �����
���� A� J� E� M� Janssen� �The Zak transform� A signal transform for sampled time�continuous signals� Philips J� Research� vol� ��� no� �� pp� ��� �� �����
���� C� Heil� �A discrete Zak transform� Tech� Rep� MTR���W������� The MITRE Cor�poration� Dec� �����
���� L� Auslander� I� C� Gertner� and R� Tolimieri� �The discrete Zak transform applicationto time�frequency analysis and synthesis of nonstationary signals� IEEE Trans� Signal
Processing� vol� ��� pp� �������� April �����
���� H� B�olcskei and F� Hlawatsch� �Discrete Zak transforms� polyphase transforms� andapplications� IEEE Trans� Signal Processing� vol� ��� pp� ����� � April �����
�� � A� Ben�Israel and T� N� E� Greville� Generalized Inverses� Theory and Applications�Wiley� �����
���� S� Li and D� M� Healy� Jr�� �A parametric class of discrete Gabor expansions� IEEETrans� Signal Processing� vol� ��� pp� �������� Feb� ��� �
���� D� G� Luenberger� Optimization by Vector Space Methods� New York� Wiley� �� ��
���� H� B�olcskei and F� Hlawatsch� �Frame�theoretic analysis and design of lter banks�Part II� Oversampled and critically sampled uniform lter banks� Tech� Rep� ������II�Department of Communications and Radio Frequency Engineering� Vienna Universityof Technology� Nov� �����
���� V� Belevitch� Classical Network Theory� Holden�Day� �� ��
���� D� C� Youla� �On the factorization of rational matrices� IRE Trans� Inf� Theory�pp� �������� �� ��
���� P� Vary� �On the design of digital lter banks based on a modied principle ofpolyphase� AE�U� vol� ��� no� ���� pp� ������� �����
� BIBLIOGRAPHY
���� M� Vetterli and D� LeGall� �Perfect reconstruction FIR lter banks� Some propertiesand factorizations� IEEE Trans� Acoust�� Speech� Signal Processing� vol� ��� pp� ���������� July �����
���� F� Hlawatsch and H� B�olcskei� �Time�frequency analysis of frames� in Proc� IEEE�SPInt� Sympos� Time�Frequency Time�Scale Analysis� �Philadelphia� PA�� pp� ������ Oct������
���� K� Swaminathan and P� P� Vaidyanathan� �Theory and design of uniform DFT� parallel�quadrature mirror lter banks� IEEE Trans� Circuits and Systems� vol� ��� pp� ���������� Nov� ��� �
�� � M� J� Bastiaans� �Gabor�s expansion and the Zak transform for continuous�time anddiscrete�time signals� Critical sampling and rational oversampling� Tech� Rep� ���E����� Technical University Eindhoven� Eindhoven� The Netherlands� Dec� �����
���� I� Daubechies� A� Grossmann� and Y� Meyer� �Painless nonorthogonal expansions� J�Math� Phys�� vol� ��� pp� ���������� May ��� �
���� J� J� Benedetto and D� F� Walnut� �Gabor frames for L� and related spaces� inWavelets�
Mathematics and Applications �J� J� Benedetto and M� W� Frazier� eds��� pp� ���� ��Boca Raton �FL�� CRC Press� �����
���� H� G� Feichtinger and K� Gr�ochenig� �Gabor frames and time�frequency analysis ofdistributions� Journal of Functional Analysis� vol� �� � no� �� pp� � ������ �����
���� H� G� Feichtinger� O� Christensen� and T� Strohmer� �A group�theoretical approach toGabor analysis� Optical Engineering� vol� ��� pp� � �������� �����
���� M� Poize� M� Renaudin� and P� Venier� �The Gabor transform as a modulated lter banksystem� inQuatorzi�eme Colloque GRETSI� �Juan�Les�Pins� France�� pp� �������� Sept������
���� M� J� Narasimha and A� M� Peterson� �Design and application of uniform digital band�pass lter�banks� in Proc� IEEE ICASSP��� �Oklahoma�� pp� �������� April �����
���� A� J� E� M� Janssen� �On rationally oversampled Weyl�Heisenberg frames� Signal Pro�cessing� vol� ��� pp� �������� �����
���� D� F� Walnut� �Continuity properties of the Gabor frame operator� J� Math� Anal�
Appl�� vol� � �� pp� �������� �����
���� H� S� Malvar� Signal Processing with Lapped Transforms� Artech House� �����
�� � J� H� Rothweiler� �Polyphase quadrature lters� a new subband coding technique� inProc� IEEE ICASSP���� �Boston� MA�� pp� ���������� April �����
���� P� L� Chu� �Quadrature mirror lter design for an arbitrary number of equal bandwidthchannels� IEEE Trans� Acoust�� Speech� Signal Processing� vol� ��� no� �� pp� �������������
���� R� D� Koilpillai and P� P� Vaidyanathan� �Cosine�modulated FIR lter banks satisfyingperfect reconstruction� IEEE Trans� Signal Processing� vol� ��� pp� �������� April �����

BIBLIOGRAPHY �
���� T� A� Ramstad and J� P� Tanem� �Cosine�modulated analysis�synthesis lter bank withcritical sampling and perfect reconstruction� in Proc� IEEE ICASSP���� �Toronto�Canada�� pp� ���������� May �����
����� R� A� Gopinath and C� S� Burrus� �Some results in the theory modulated lter banksand modulated wavelet tight frames� Applied and Computational Harmonic Analysis�vol� �� pp� ������ � �����
����� T� Q� Nguyen and R� D� Koilpillai� �The theory and design of arbitrary�length cosine�modulated lter banks and wavelets� satisfying perfect reconstruction� IEEE Trans�
Signal Processing� vol� ��� pp� �������� March ��� �
����� Y��P� Lin and P� P� Vaidyanathan� �Linear phase cosine modulated maximally deci�mated lter banks with perfect reconstruction� IEEE Trans� Signal Processing� vol� ���pp� ���������� Nov� �����
����� N� J� Fliege� �Computational e!ciency of modied DFT polyphase lter banks� inProc� � th Asilomar Conf� Signals� Syst�� Computers� �Pacic Grove� CA�� pp� ��� ������ Nov� �����
����� N� J� Fliege� Multirate Digital Signal Processing� Wiley� �����
����� T� Karp and N� J� Fliege� �MDFT lter banks with perfect reconstruction� in Proc�
IEEE ISCAS�� � �Seattle� WA�� pp� �������� May �����
��� � T� Karp� J� Kliewer� A� Mertins� and N� J� Fliege� �Processing arbitrary length signalswith MDFT lter banks� in Proc� IEEE ICASSP��� �Atlanta� GA�� pp� ����������May ��� �
����� H� Xu� W� S� Lu� and A� Antoniou� �E!cient iterative design method for cosine�modulated QMF banks� IEEE Trans� Signal Processing� vol� ��� pp� � ���� �� July��� �
����� H� S� Malvar� �Lapped transforms for e!cient transform�subband coding� IEEE Trans�
Acoust�� Speech� Signal Processing� vol� ��� pp� � ������ June �����
����� J� Kliewer and A� Mertins� �Design of paraunitary oversampled cosine�modulated lterbanks� in Proc� IEEE ICASSP��� vol� �� �Munich� Germany�� pp� �������� � April�����
����� P� Yip and K� R� Rao� �Fast discrete transforms� in Handbook of Digital Signal Pro�
cessing �D� F� Elliott� ed��� Academic Press� �����
����� R� J� Marks� Introduction to Shannon Sampling Theory and Interpolation Theory�Springer Verlag� �����
����� L� E� Franks� Signal Theory� Englewood Cli�s �NJ�� Prentice Hall� �� ��
����� L� L� Scharf� Statistical Signal Processing� Reading �MA�� Addison Wesley� �����
����� R� A� Haddad and K� Park� �Modeling� analysis� and optimum design of quantized M �band lter banks� IEEE Trans� Signal Processing� vol� ��� pp� ���������� Nov� �����
����� V� K� Goyal� �Quantized overcomplete expansions� Analysis� synthesis and algorithms�Master�s thesis� University of California at Berkeley� July �����
BIBLIOGRAPHY
��� � N� T� Thao and M� Vetterli� �Deterministic analysis of oversampled A�D conversion anddecoding improvement based on consistent estimates� IEEE Trans� Signal Processing�vol� ��� pp� �������� March �����
����� N� T� Thao and M� Vetterli� �Lower bound on the mean squared error in oversampledquantization of periodic signals using vector quantization analysis� IEEE Trans� Inf�
Theory� vol� ��� pp� � ������ March ��� �
����� N� T� Thao� �Vector quantization analysis of sigma�delta modulation� IEEE Trans�
Signal Processing� vol� ��� pp� �������� April ��� �
����� Z� Cvetkovi�c and M� Vetterli� �Overcomplete expansions and robustness� in Proc� IEEETFTS��� �Paris� France�� pp� �������� June ��� �
����� I� Galton and H� T� Jensen� �Oversampling parallel delta�sigma modulation A�D con�version� IEEE Trans� Circuits and Systems II� vol� ��� pp� �������� Dec� ��� �
����� R� Khoini�Poorfard� L� B� Lim� and D� A� Johns� �Time�interleaved oversampling A�Dconverters� Theory and practice� IEEE Trans� Circuits and Systems II� vol� ��� pp� ��� ��� Aug� �����
����� A� Papoulis� Probability� Random Variables� and Stochastic Processes� New York�McGraw�Hill� �rd ed�� �����
����� A� Weinmann� Uncertain Models and Robust Control� Vienna� Austria� Springer� �����
����� U� Grenander and G� Szego� Toeplitz Forms and Their Applications� New York� ChelseaPublishing Company� �����
����� R� M� Gray� �Toeplitz and circulant matrices� Tech� Rep� ISL� ������ Stanford Uni�versity ISL� April �����
��� � C� W� Therrien� Discrete Random Signals and Statistical Signal Processing� EnglewoodCli�s �NJ�� Prentice Hall� �����
����� S� Hein and A� Zakhor� �Reconstruction of oversampled band�limited signals from sigma�delta encoded binary sequences� IEEE Trans� Signal Processing� vol� ��� pp� ��������April �����
����� S� L� Tan and T� R� Fischer� �Linear prediction of subband signals� IEEE Journal on
Selected Areas in Communications� vol� ��� no� �� pp� ��� ������ �����
����� S� Rao and W� A� Pearlman� �Analysis of linear prediction� coding� and spectral esti�mation from subbands� IEEE Trans� Inf� Theory� vol� ��� pp� �� ������� July ��� �
����� P� W� Wong� �Rate distortion e!ciency of subband coding with crossband prediction�IEEE Trans� Inf� Theory� vol� ��� pp� ������ � Jan� �����
����� S� M� Kay� Modern Spectral Estimation� Englewood Cli�s �NJ�� Prentice Hall� �����
����� R� A� Wiggins and E� A� Robinson� �Recursive solution to the multichannel lteringproblem� J� Geophys� Res�� vol� ��� pp� ���������� April �� ��
����� A� Gersho and R� M� Gray� Vector Quantization and Signal Compression� Boston�Kluwer� �����

BIBLIOGRAPHY
����� R� M� Young� An Introduction to Nonharmonic Fourier Series� New York� AcademicPress� �����
����� C� Heil� �A basis theory primer� tech� rep�� Georgia Institute of Technology� �����
��� � K� Gr�ochenig� �Acceleration of the frame algorithm� IEEE Trans� Signal Processing�vol� ��� no� ��� pp� ���������� �����
����� A� Aldroubi� �Portraits of frames� Proceedings of the American Mathematical Society�vol� ���� no� � pp� � ��� �� �����
����� H� G� Feichtinger� �Pseudo�inverse matrix methods for signal reconstruction from partialdata� in Proc� of SPIE Conf� Visual Comm� and Image Processing� �Boston�� pp� � ����� Nov� �����
����� O� Christensen� Frame Decompositions in Hilbert Spaces� PhD thesis� Aarhus Univ��Aarhus� Denmark� and Univ� of Vienna �Vienna� Austria�� �����
����� O� Christensen� �Frames and pseudo�inverses� J� Math� Anal� Appl�� vol� ��� no� �������


















