Outline Vision-Based Control of Unmanned Aerial Vehicles · Vision-Based Control of Unmanned Aerial...
12
FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial Vision-Based Control of Unmanned Aerial Vehicles Using Type-1 and Type-2 Fuzzy Logic Controllers with ROS Erdal Kayacan, Changhong Fu School of Mechanical and Aerospace Engineering Nanyang Technological University (NTU), Singapore Email: [email protected] | Web: http://www.erdalkayacan.com FUZZ-IEEE 2017 Tutorial July 9th, 2017 Naples, Italy FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial Outline 1. Motivation: Visual Control of UAVs Using FLCs with ROS 2. UAV and its Dynamic Model 3. Computer Vision for UAV Control 4. Type-1 and Type-2 FLCs for UAV Control 5. Robot Operating System (ROS) for UAV Application 6. UAV Simulation and Real Flight Demo FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial Outline 1. Motivation: Visual Control of UAVs Using FLCs with ROS 2. UAV and its Dynamic Model 3. Computer Vision for UAV Control 4. Type-1 and Type-2 FLCs for UAV Control 5. Robot Operating System (ROS) for UAV Application 6. UAV Simulation and Real Flight Demo FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial 1. Motivation: Visual Control of UAVs Using FLCs with ROS Multiple-rotor, fixed-wing and fixed-wing vertical take-off (VTOL) UAVs FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial 1. Motivation: Visual Control of UAVs Using FLCs with ROS Why UAVs? more than 300 civilian UAV applications *saving 10x time, 10x money and 10x lives ... FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial 1. Motivation: Visual Control of UAVs Using FLCs with ROS Why Vision? Onboard sensors for autonomous flights of UAVs: However, GPS: unreliable in urban environment, lost in indoor IMU: low accuracy, accumulated error Laser: limited range, heavy, expensive, high computing cost FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial 1. Motivation: Visual Control of UAVs Using FLCs with ROS Why Vision? camera small size, light, more flexible to mount on UAV, less consumption (1 USB interface, no extra power requirement) low cost, more options (different lenses), provide richer environment information for UAV suitable for more UAV applications, e.g., detect different objects with different filters (special wavelengths) different lenses filters FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial FUZZ IEEE 2017 Tutorial 1. Motivation: Visual Control of UAVs Using FLCs with ROS Why Vision? Different onboard sensors used for the UAVs 2006-2007 2007-2008 2008-2009 2009-2010 2010-2011 2011-2012 2012-2013 2013-2014 2014-2015 2015-2016 0 1000 2000 3000 4000 5000 6000 7000 8000 9000 Publication number UAV + Computer Vision UAV + Laser UAV + GPS + IMU applications of all onboard sensors for UAVs are increasing year by year vision-based applications are obviously more than the applications with other sensors, the vision-based application is increasing faster
Transcript of Outline Vision-Based Control of Unmanned Aerial Vehicles · Vision-Based Control of Unmanned Aerial...

FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Vision-Based Control of Unmanned AerialVehicles
Using Type-1 and Type-2 Fuzzy Logic Controllers with ROS
Erdal Kayacan, Changhong Fu
School of Mechanical and Aerospace EngineeringNanyang Technological University (NTU), Singapore
Email: [email protected] | Web: http://www.erdalkayacan.com
FUZZ-IEEE 2017 TutorialJuly 9th, 2017Naples, Italy
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Outline
1. Motivation: Visual Control of UAVs Using FLCs with ROS
2. UAV and its Dynamic Model
3. Computer Vision for UAV Control
4. Type-1 and Type-2 FLCs for UAV Control
5. Robot Operating System (ROS) for UAV Application
6. UAV Simulation and Real Flight Demo
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Outline
1. Motivation: Visual Control of UAVs Using FLCs with ROS
2. UAV and its Dynamic Model
3. Computer Vision for UAV Control
4. Type-1 and Type-2 FLCs for UAV Control
5. Robot Operating System (ROS) for UAV Application
6. UAV Simulation and Real Flight Demo
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
� Multiple-rotor, fixed-wing and fixed-wing vertical take-off (VTOL) UAVs
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
� Why UAVs?more than 300 civilian UAV applications
*saving 10x time, 10x money and 10x lives ...
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
� Why Vision?
Onboard sensors for autonomous flights of UAVs:
However,� GPS: unreliable in urban environment, lost in indoor� IMU: low accuracy, accumulated error� Laser: limited range, heavy, expensive, high computing cost
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
� Why Vision?
camera
� small size, light, more flexible to mount on UAV, lessconsumption (1 USB interface, no extra powerrequirement)
� low cost, more options (different lenses), providericher environment information for UAV
� suitable for more UAV applications, e.g., detectdifferent objects with different filters (specialwavelengths)
different lenses filters
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
� Why Vision?Different onboard sensors used for the UAVs
2006
-2007
2007
-2008
2008
-2009
2009
-2010
2010
-2011
2011
-2012
2012
-2013
2013
-2014
2014
-2015
2015
-2016
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
Publicationnumber
UAV + Computer VisionUAV + LaserUAV + GPS + IMU
� applications of all onboard sensors for UAVs are increasing year by year� vision-based applications are obviously more than the applications with other sensors, the
vision-based application is increasing faster

FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
� Why FLCs?
UAV Control Scheme
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
� Why FLCs?
Classical controllers for UAVs:� proportional-integral-derivative
(PID)� linear quadratic regulator (LQR)� sliding mode control (SMC) ...
UAV platforms
However, classical controllers:� require a precise dynamic model of the UAV
↑ achieving an accurate mathematical model for such complex aerialvehicles is often time-consuming
� work under the assumption that significant internal and external uncertainties do notsubstantially affect the UAV systems ...
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
� Why FLCs?
In addition:� frequently-used sensors onboard UAVs, e.g., camera, often lack precise modeling� measurements consist of numbers of uncertain, incomplete and possibly inaccurate
information� the process of conducting a UAV application also contains numerous uncertain and
challenging factors ...
For example:
Left image Right image Depth image
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
� Why ROS?
� Working with different platforms:
Ubuntu Ubuntu (armhf) OS X Android
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
� Why ROS?
� Working with different robots:
https://vimeo.com/146183080
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
1. Motivation: Visual Control of UAVs Using FLCs withROS
� Why ROS?
In addition:� Working with different camera sensors:
monocular RGB-D Stereo� Working with different simulation environments, e.g., Gazebo� Seamless interface, e.g., the C/C++ codes developed in the ROS-Gazebo simulation can be
used for the real applications/systems directly
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Outline
1. Motivation: Visual Control of UAVs Using FLCs with ROS
2. UAV and its Dynamic Model
3. Computer Vision for UAV Control
4. Type-1 and Type-2 FLCs for UAV Control
5. Robot Operating System (ROS) for UAV Application
6. UAV Simulation and Real Flight Demo

FUZZIE
EE20
17Tu
to
FUZZIE
EE20
17Tu
t
FUZZIE
EE20
17Tu
to
FUZZIE
EE20
17Tu
to
3. UAV and its Dynamic Model
X4 Quadcopter
ritotori
torial
orial
orial
orial
Y6 Coaxial Tricopter
� {�xW ,�yW ,�zW } is the world fixed inertial reference frame,� {�xB ,�yB ,�zB} is the body frame,� ωi is the speed of the i-th propeller,� fi is the force generated by the i-th propeller,� {τφ ,τθ ,τψ} are torques around x , y and z axes, respectively.� T is the thrust force.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
3. UAV and its Dynamic Model
Motion along z-axis
Motion along y -axis
FFF
Motion along x-axis
Motion around z-axis
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
3. UAV and its Dynamic ModelUAV dynamic model:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎩
x = vx vx = cosφ cosψ sinθ+sinφ sinψm T
y = vy vy = cosφ sinψ sinθ−cosψ sinφm T
z = vz vz = cosφ cosθm T −g
φ = ωφ +sinφ tanθωθ +cosφ tanθωψ ωφ = Iyy −IzzIxx
ωθ ωψ + 1Ixx
τφ
θ = cosφωθ −sinφωψ ωθ = Izz−IxxIyy
ωφ ωψ + 1Iyy
τθ
ψ = sinφcosθ ωθ + cosφ
cosθ ωψ ωψ = Ixx−IyyIzz
ωφ ωθ + 1Izz
τψ
.
UAV state:
x =[
x y z φ θ ψ vx vy vz ωφ ωθ ωψ]T
[ {position} {attitude} {linear velocity}{angular velocity}]T.
UAV control inputs:u =
[T τφ τθ τψ
]T.
FUZZIE
EE20
1
FUZZIE
EE20
17
FUZZIE
EE20
17
FUZZIE
EE20
17
3. UAV and its Dynamic Model
17Tu
tori
7 Tutor
ial
17Tu
torial
17Tu
torial
X4 Quadcopter
The relation between u and ωi is
⎧⎪⎪⎪⎨⎪⎪⎪⎩
T = b(ω2
1 + ω22 + ω2
3 + ω24
)τφ = sin π
4 bl(ω2
1 −ω22 −ω2
3 + ω24
)τθ = cos π
4 bl(−ω2
1 −ω22 + ω2
3 + ω24
)τψ = d
(−ω21 + ω2
2 −ω23 + ω2
4
) .
FUZZIE
EE20
1
FUZZIE
EE20
17
FUZZIE
EE20
17
FUZZIE
EE20
17
3. UAV and its Dynamic Model
177T
17T
17T7 Tu
torial
Tutor
ial
7 Tutor
ial
7 Tutor
ial
Y6 Coaxial Tricopter
The relation between u and ωi is
⎧⎪⎪⎪⎨⎪⎪⎪⎩
T = b(ω2
1 + ω22 + ω2
3 + ω24 + ω2
5 + ω26
)τφ = sin π
3 bl(ω2
3 + ω24 −ω2
5 −ω26
)τθ = bl
(−ω21 −ω2
2 +cos π3 (ω2
3 + ω24 + ω2
5 + ω26 ))
τψ = d(−ω2
1 + ω22 −ω2
3 + ω24 −ω2
5 + ω26
) .
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Outline
1. Motivation: Visual Control of UAVs Using FLCs with ROS
2. UAV and its Dynamic Model
3. Computer Vision for UAV Control
4. Type-1 and Type-2 FLCs for UAV Control
5. Robot Operating System (ROS) for UAV Application
6. UAV Simulation and Real Flight Demo
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
What is an image?
It is a two dimensinal (2D) numerical representation, i.e., a 2D function f (x ,y ) or m×n matrix of athree dimensional (3D) scene or object.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
RGB image and pixel values
An RGB image has three channels: red (R), green (G), and blue (B). RGB channels roughly followthe color receptors in the human eye, and are used in computer displays and imaging systems.

FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
What is image processing?
� It is a series of computer operations leading to some desired results, e.g., object detection,image content-based information retrieval and security.
Object detection
What is image processing?
� Autonomous robot control
FUZZIE
EE20
17Tu
tori lllalalal
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
tori lllalalal
FUZZIE
EE20
17Tu
tori lllalalal
Visual Odometry: it is the process of incrementally estimating the pose of the vehicle, e.g., UAV, byexamining the changes that motion induces on the images of its onboard cameras, e.g., monocular,stereo and RGB-D cameras
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Visual Odometry (VO)Two types of VO systems:
� direct method: it employs
� all image pixels (dense)� all pixels with sufficiently large intensity gradient (semi-dense)� sparsely selected pixels (sparse)
minimize a photometric error obtained by direct image alignment on the selected pixels.
Image alignment:
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Visual Odometry (VO)
� feature-based approach: it extracts a sparse set of features from each image, and thenmatch them across multiple frames. Camera poses and feature depths are estimated byminimizing the reprojection errors between feature pairs.
Feature detection and matching:
Indoor Outdoor Indoor & Outdoor
� feature descriptors are invariant to some extend to illumination and view-point changes� feature-based methods are more robust than direct methods to brightness inconsistencies
and large view-point changes among consecutive frames, etc
feature-based approach!
Visual Odometry (VO)
VO computes the camera path incrementally, i.e., pose after pose:
Image sequence
Feature detection
Feature matching (tracking)
Motion estimation
2D-2D 3D-3D 3D-2D
Local optimization Tk,k-1
Tk+1,k
Ck-1
Ck
Ck+1
* Scaramuzza, D., Fraundorfer, F., Visual Odometry: Part I - The First 30 Years and Fundamentals,IEEE Robotics and Automation Magazine, 18(4), 2011.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Visual Odometry (VO)
� Pixel value variation over time
1
Pixel values on the 1st location165 170 175 180 185 190 195 200 205
Entri
es
0
100
200
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Visual Odometry (VO)
However, besides the modeling errors of UAV and sensors,� Larger illumination changes� Faster rotations and translations� Less feature detection, etc
→ More uncertainties on the vision-based pose estimation output
Examples of feature tracking:
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Visual Odometry (VO)
� Flight video:
https://youtu.be/xcFqg2ZTQTI
More details:Changhong Fu, Andriy Sarabakha, Erdal Kayacan, Christian Wagner, Robert John, and Jonathan M. Garibaldi. Input UncertaintySensitivity Enhanced Non-Singleton Fuzzy Logic Controllers for Long-Term Navigation of Quadrotor VTOL UAVs. In IEEE/ASMETransactions on Mechatronics, Submitted, December, 2016.

FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Visual Odometry (VO)
FUZZZZUZZZZZUFUFUZUZUUFUZZ
FUZZZFUZZUZ
FUZZZFUZZZZZFUZUZZUZZ
FUZFUZZUZ
FUZFUZZFUZZZFUZZUZ
FUZZZFU
ZZFUZZZZFUZFUZZUZ
FUReal Flight in Corridor
Captured Images(illumination changes, blur motions, floor or wall
reflections etc)
Video: Real Flight Test
https://youtu.be/RgujyKVj50o
FUZZIE
EE20
FUZZIE
EE2
FUZZIE
EE20
FUZZIE
EE20
Visual Odometry (VO)
Library Environment (Indoor&Outdoor)
−20 −15 −10 −5 0 5−5
0
5
10
15
20
25
X Position (m)
Z Po
sitio
n (m
)
Our MethodLibviso2
Estimated Trajectories
Libviso2: http://www.cvlibs.net/software/libviso/
17Tu
toorialal
2017
Tutor
iuto
riuto
rial
2017
Tutor
iuto
riuto
riaalal
2017
Tutor
iuto
riuto
riaalal
3D Mapping of Library
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Outline
1. Motivation: Visual Control of UAVs Using FLCs with ROS
2. UAV and its Dynamic Model
3. Computer Vision for UAV Control
4. Type-1 and Type-2 FLCs for UAV Control
5. Robot Operating System (ROS) for UAV Application
6. UAV Simulation and Real Flight Demo
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
How perfect world do we have?
”Given, for one instant, an intelligencewhich could comprehend all the forcesby which nature is animated and therespective situation of the beings whocompose it an intelligence sufficientlyvast to submit these data to analysis itwould embrace in the same formula themovements of the greatest bodies ofthe universe and those of the lightestatom. For it, nothing would beuncertain and the future, as the past,would be present to its eyes”.
— Pierre-Simon Laplace Less uncertainty
Less uncertainty
Less uncertainty
Less uncertainty
Less uncertainty
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Model-based and model-free control
When an engineer faces with an industrial control problem, two distinct forms of solutionapproaches exist in literature:
� the use of objective knowledge: mathematical models (model-based approach)
� the use of subjective knowledge: rules, expert information, design requirements (model-free
approach)� Artificial Neural Networks� Fuzzy Logic. FUZZ
IEEE
2017
Tutor
ial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Fuzzy logic theory
What is fuzzy logic?
“Fuzzy logic is a precise conceptual system of reasoning, deduction and computation in which theobjects of discourse and analysis are, or are allowed to be, associated with imperfect information.Imperfect information is information which in one or more respects is imprecise, uncertain,incomplete, unreliable, vague or partially true.”
— Lotfi A. Zadeh
“Imprecise enough but useful”
— Anonymous
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
A Boolean membership function
Sharp-edged! A small change in an input value may cause a big change in the output values.
Height (cm)
Degr
ee o
f mem
bers
hip
()
(Short) 0.0
(Tall) 1.0
170
Crisp membership function
Figure: A possible description of the vague concept “tall” by a crisp set
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Type-1 Fuzzy Membership Functions
No uncertainty in the membership function! There exits a clear (crisp) membership value for everyinput data point.
190 150
Two different fuzzy membership functions
160 180 Height (cm)
Degr
ee o
f mem
bers
hip
()
(Short) 0.0
(Tall) 1.0
Figure: A possible description of the vague concept “tall” by a fuzzy set

FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Pros and Cons of Fuzzy Logic Control
Pros:� Ability to control a system without
having its mathematical model� Close to human way of thinking� Computation time is acceptable� Suitable for adaptive structures� Can incorporate a conventional
controller (PID, state feedback) andfine tune it
Cons:� Number of design parameters (scaling
factors, number and shape of themembership function, etc) is high
� No clear relationships between theseparameters and the controller’sperformance.
� No systematic way of analyzing thestability of the system.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Western and Eastern Perspectives
Western and Eastern perspectives on fuzzy logic control
China USA Taiwan India England Canada Turkey S. Korea Japan Iran0
100
200
300
400
500
600
Pub
licat
ion
num
ber
Fuzzy logic control
(a)
(a)
USA China England Germany Canada Italy Spain Switzerland
Netherlands
Australia0
500
1000
1500
2000
2500
Pub
licat
ion
num
ber
Model predictive control
(b)
(b)
Figure: Web of Science search for ”fuzzy logic control” (a) Web of Science search for ”modelpredictive control” (b)
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
A Type-1 Fuzzy Logic System Block Diagram
Figure: A Type-1 Fuzzy Logic System Block Diagram
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Fuzzifier
Singleton fuzzifier:
μ∑j (σj ) =
{1, σj = σ ′
j
0, σj �= σ ′j
.
Non-singleton fuzzifier:
μ∑j (σj ) = exp
[− (σj −σ ′
j )2
2σ2F ,j
].
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Non-Singleton Type-1 Fuzzy Logic Control
Types of prefilters:� standard,� centroid,� similarity (Best!).
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Video
� Flight video:
https://youtu.be/NVfgz38RFuA
More details:Changhong Fu, Andriy Sarabakha, Erdal Kayacan, Christian Wagner, Robert John, and Jonathan M. Garibaldi. Similarity-BasedNon-Singleton Fuzzy Logic Control for Improved Performances in UAVs. In 2017 IEEE International Conference on Fuzzy Systems(FUZZ-IEEE), July 2017.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
A Type-2 Fuzzy Logic System Block Diagram
Although the structure in the figure below brings some advantages when dealing with uncertainties,it also will increase the computational burden!
Figure: A Type-2 Fuzzy Logic System Block Diagram
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Type-1 vs Type-2
� Type-1 fuzzy sets two dimensional� Type-2 fuzzy sets three dimensional� Membership grade in [0,1]� Membership grade is an interval� Type-1 fuzzy systems computationally cheap� Type-2 fuzzy systems computationally expensive

Interval Type-2 Membership Function
ZZZZFUZZ
I
UZZIE
UZZIE
ZZZZZZZZZZZ
EE20
17Tu
toriallalllll
ZFUZZ
IEZZ
IZZ
IZZZZZ
EE20
17Tu
toriall
ZZZZIE
ZZI
ZZI
FUZZIE
UZZIE
UZZIE
ZZI
ZI
ZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZZEE
2017
Tutor
iallalllalalalalaaalallall
ZZZIE
ZZZFUZZ
IE
UZZIE
UZZIE
ZZI
ZZZZZZZZZZZZZZZZZZZZZZZZZZZZEE
2017
Tutor
iallallllalalalallall
Triangular interval type-2 membership function:
⎧⎪⎨⎪⎩
μ Akj
(σj ) = max(
min( σj−ai−1
ai−ai−1,
ai+1−σjai+1−ai
),0)
μAk
j(σj ) = mk
j μ Akj
(σj ).
Symmetrical MFs are employed to simplify the design complexity:
m1j = m2
j = m3j = αj .
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Single Input Interval Type-2 Fuzzy PID
Fuzzy mapping:
ϕ(σ ) =σ2
(1
α + |σ |−α|σ | +−1+ α
−1+ α |σ |).
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Single Input Interval Type-2 Fuzzy PID
PS-1: aggressive αp , moderate αi , aggressive αdPS-3: aggressive αp , moderate αi , smooth αdPS-5: moderate αp , moderate αi , moderate αdPS-7: smooth αp , moderate αi , aggressive αdPS-9: smooth αp , moderate αi , smooth αd
x-axis tracking. y -axis tracking. z-axis tracking.
More details:Andriy Sarabakha, Changhong Fu, Erdal Kayacan, and Tufan Kumbasar. Type-2 Fuzzy Logic Controllers Made Even Simpler: From Designto Deployment in Real-Time for Quadcopter UAVs. IEEE Transactions on Industrial Electronics. Submitted for publication.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Video
Flight video (Real Flight):
https://youtu.be/Hz3f8N-30dg
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Double Input Interval Type-2 Fuzzy PD
Control surfaces:
-1
1 1
0.5 0.5
σ1σ2
0 0
0
ϕ(σ1,σ2)
-0.5-0.5
-1 -1
1
PS-1: α1 = 0.1,α2 = 0.1
-1
11
0.5 0.5
σ1σ2
00
0
ϕ(σ1,σ2)
-0.5-0.5
-1 -1
1
PS-2: α1 = 0.5,α2 = 0.5
-1
11
0.5 0.5
σ1σ2
0 0
0
ϕ(σ1,σ2)
-0.5 -0.5
-1-1
1
PS-3: α1 = 0.9,α2 = 0.9
More details:Andriy Sarabakha, Changhong Fu, and Erdal Kayacan. Double-Input Interval Type-2 Fuzzy Logic Controllers: Analysis and Design. In 2017IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), July 2017.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Double Input Interval Type-2 Fuzzy PD
x-axis tracking. y -axis tracking. z-axis tracking.
3D trajectory tracking.
DI-IT2-FPID controller PS-1 PS-2 PS-3
Euclidean MSE, [m] 0.777 0.748 0.821
Overshoot, [m] 0.405 0.069 0.031
Rise time, [s] 0.80 1.18 3.32
Settling time (5%), [s] - 1.71 2.53
Table: Control characteristics.
More details:Andriy Sarabakha, Changhong Fu, and Erdal Kayacan. Double-Input Interval Type-2 Fuzzy Logic Controllers: Analysis and Design. In 2017IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), July 2017.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Video
Flight video (Real Flight):
https://youtu.be/4U7BHQFo9boFUZZ
IEEE
2017
Tutor
ial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Outline
1. Motivation: Visual Control of UAVs Using FLCs with ROS
2. UAV and its Dynamic Model
3. Computer Vision for UAV Control
4. Type-1 and Type-2 FLCs for UAV Control
5. Robot Operating System (ROS) for UAV Application
6. UAV Simulation and Real Flight Demo

FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Review of ROS
� a peer-to-peer robot middleware package� a ”meta” operating system� a collection of packaging, software building tools� an architecture for distributed inter-process or
inter-machine communication and configuration� a language-independent architecture, including
C++, java, python, lisp, etc� provides development tools for system runtime
and data analysis
Groovy Fuerte Electric Hydro Indigo
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
How to install the ROS
Instruction → http://wiki.ros.org/kinetic/Installation/Ubuntu
The main steps include:
� Setup your sources.list
sudo sh -c ’echo ”deb http://packages.ros.org/ros/ubuntu $(lsb release -sc) main” >/etc/apt/sources.list.d/ros-latest.list’
� Set up your keys
sudo apt-key adv –keyserver hkp://ha.pool.sks-keyservers.net:80 –recv-key421C365BD9FF1F717815A3895523BAEEB01FA116
� make sure your Debian package index is up-to-date
sudo apt-get update� Desktop-Full Install: (Recommended)
sudo apt-get install ros-kinetic-desktop-full� Initialize rosdep
sudo rosdep initrosdep update
� Environment setup
echo ”source /opt/ros/kinetic/setup.bash” >> /.bashrcsource /.bashrc
How ROS works
ZZIE
EE20
17Tu
torial
ZIE
EE20
17Tu
torial
ZZIE
EE20
17Tu
torial
ZZIE
EE20
17Tu
torial
ROS master
UAV node
Image processing node
Camera node
Control node
Publish images on topic “image”
Receive velocities on topic “cmd_vel”
Receive position on topic “position” and publish velocities on
topic “cmd_vel”
Receive images on topic “image” and publish position on
topic “position”
Camera Onboard Computer UAV
Example of ROS-based UAV navigation using vision-based position estimation
ROS master
EE20
17Tu
torial
E20
17Tu
torial
EE20
17Tu
torial
EE20
17Tu
torial
ROS master
UAV node
Image processing node
Camera node
Control node
Publish images on topic “image”
Receive velocities on topic “cmd_vel”
Receive position on topic “position” and publish velocities on
topic “cmd_vel”
Receive images on topic “image” and publish position on
topic “position”
Camera Onboard Computer UAV
ROS Master� provides naming and registration services to the rest of the nodes in the ROS system� publishers and subscribers to topics as well as services� enables individual ROS nodes to locate one another. Once these nodes have located each
other they communicate with each other peer-to-peer, etc.
ROS nodes
EE20
17Tu
torial
E20
17Tu
torial
EE20
17Tu
torial
EE20
17Tu
torial
ROS master
UAV node
Image processing node
Camera node
Control node
Publish images on topic “image”
Receive velocities on topic “cmd_vel”
Receive position on topic “position” and publish velocities on
topic “cmd_vel”
Receive images on topic “image” and publish position on
topic “position”
Camera Onboard Computer UAV
Nodes� processes those perform computations� combined together into a graph and communicate with one another using streaming topics,
and the Parameter Server, etc.
ROS topics
IEEE
2017
Tutor
ial
EEE20
17Tu
torial
IEEE
2017
Tutor
ial
IEEE
2017
Tutor
ial
ROS master
UAV node
Image processing node
Camera node
Control node
Publish images on topic “image”
Receive velocities on topic “cmd_vel”
Receive position on topic “position” and publish velocities on
topic “cmd_vel”
Receive images on topic “image” and publish position on
topic “position”
Camera Onboard Computer UAV
Topics:
� named buses over which nodes exchange messages
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talker
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
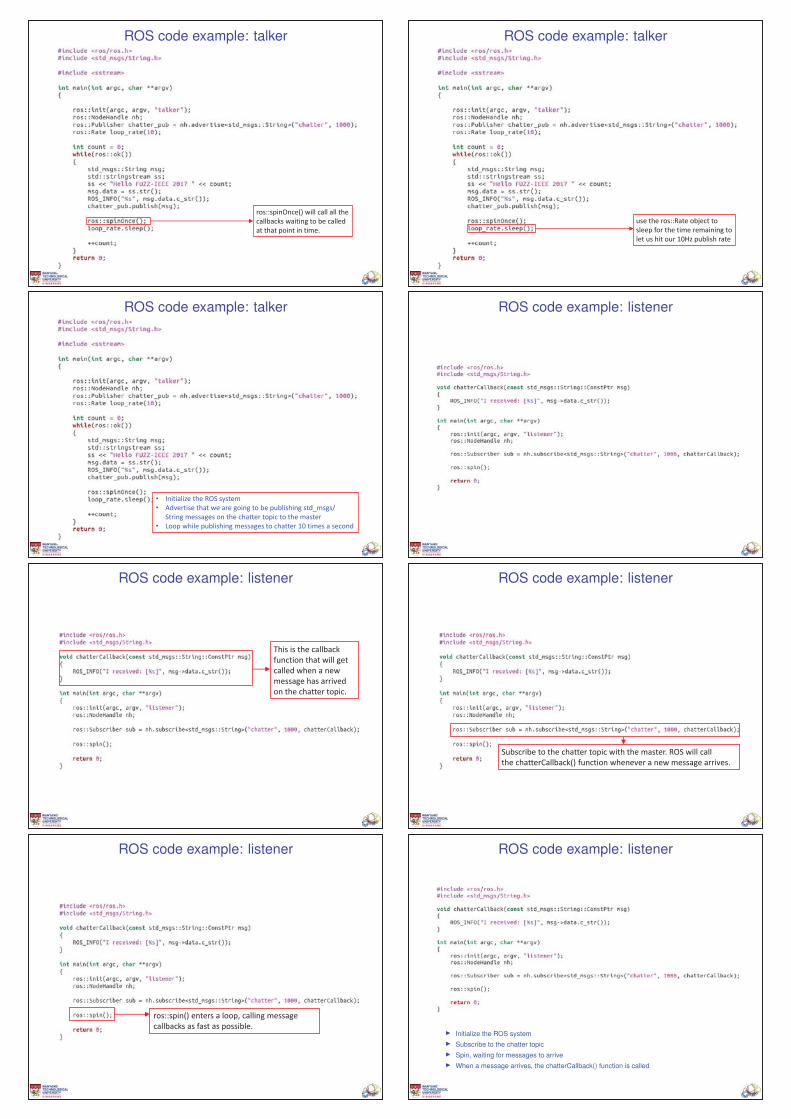
ROS code example: talker
is a convenience include that includes all the headers necessary to use the most common public pieces of the ROS system.

FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talker
This includes the std_msgs/String message, which resides in the std_msgs package.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talker
Initialize ROS. This allows ROS to do name remapping through the command line
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talker
Create a handle to this process' node.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talkerTell the master that we are going to be publishing a message of type std_msgs/String on the topic chatter. This lets the master tell any nodes listening on chatter that we are going to publish data on that topic.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talker
A ros::Rate object allows you to specify a frequency that you would like to loop at.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talker
ros::ok() will return false if: • a SIGINT is received (Ctrl-C) • we have been kicked off the
network by another node with the same name
• ros::shutdown() has been called by another part of the application.
• all ros::NodeHandles have been destroyed
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talker
Broadcast a message on ROS FUZZ
IEEE
2017
Tutor
ial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talker
ROS_INFO is the replacement for printf/cout.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talker
ros::spinOnce() will call all the callbacks waiting to be called at that point in time.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talker
use the ros::Rate object to sleep for the time remaining to let us hit our 10Hz publish rate
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: talker
• Initialize the ROS system • Advertise that we are going to be publishing std_msgs/
String messages on the chatter topic to the master • Loop while publishing messages to chatter 10 times a second
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: listener
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: listener
This is the callback function that will get called when a new message has arrived on the chatter topic.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: listener
Subscribe to the chatter topic with the master. ROS will call the chatterCallback() function whenever a new message arrives.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: listener
ros::spin() enters a loop, calling message callbacks as fast as possible.
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
ROS code example: listener
� Initialize the ROS system� Subscribe to the chatter topic� Spin, waiting for messages to arrive� When a message arrives, the chatterCallback() function is called

FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Outline
1. Motivation: Visual Control of UAVs Using FLCs with ROS
2. UAV and its Dynamic Model
3. Computer Vision for UAV Control
4. Type-1 and Type-2 FLCs for UAV Control
5. Robot Operating System (ROS) for UAV Application
6. UAV Simulation and Real Flight Demo
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Gazebo Simulator� an essential tool in every roboticist’s toolbox� well-designed simulator to rapidly test
algorithms, design robots, perform regressiontesting and train AI system using realisticscenarios
� offers the ability to accurately and efficientlysimulate populations of robots in complex indoorand outdoor environments
� a robust physics engine, high-quality graphics,and convenient programmatic and graphicalinterfaces
� free with a vibrant community, etc
� Real UAVs for Gazebo simulator
......
Different quadcopters and Y6 tricopter (more UAVs)
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Gazebo Simulator
� three different types of UAVs shown in the Gazebo simulator
Screenshot for Gazebo simulator (Quadcopters and Y6 Tricopter)
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Gazebo Simulator - rqt graph (Namespaces)
Screenshot for all communications in Gazebo simulator
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Gazebo Simulator - rqt graph (Nodes)
Screenshot for all communications in Gazebo simulator
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Gazebo Simulator - rqt graph (Topics)
Screenshot for all communications in Gazebo simulator
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Gazebo Simulator - Comparison Demo� Comparison of parameter settings in DI-IT2-FLC
Screenshot for Gazebo simulator with three bebop UAVs
Red → 0.1, Green → 0.4, Blue → 0.95
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Gazebo Simulator - Comparison Demo� 4 waypoints
1st waypoint 2nd waypoint
3rd waypoint 4th waypoint

FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Gazebo Simulator - Comparison Demo
Screenshot for Rviz with three bebop UAVs
Red → 0.1, Green → 0.4, Blue → 0.95
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Gazebo Simulator - Comparison Demo
� Online tuning using rqt reconfigure
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Gazebo Simulator - Comparison Demo
� Performance check using rqt plot
Screenshot for rqt plot with three bebop UAVs
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Real Flight Demo: Target Following
Real UAV: Bebop Target
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
For better future, vision for robotics!
School of Mechanical and Aerospace EngineeringNanyang Technological University (NTU), Singapore
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
FUZZIE
EE20
17Tu
torial
Thank you for yourattention
Your questions, suggestions and comments are welcome!
Contact:[email protected]
C++ codes:https://github.com/andriyukr/FLC