Otimização da utilização de rotas rodoviárias segundo as ... · vem incentivando os...
22
Otimização da utilização de rotas rodoviárias segundo as óticas econômica e ambiental Daniela Bacchi Bartholomeu Doutoranda em Economia Aplicada – ESALQ/USP CPF: 273.182.668-10 Endereço: Av. Guerino Lubiani, 464 – Vila Verde. CEP: 13.420-823 [email protected] José Vicente Caixeta Filho Professor Titular do Departamento de Economia, Administração e Sociologia da ESALQ/USP CPF: 075965318-65 Endereço: Departamento de Economia, Administração e Sociologia -ESALQ/USP Av. Pádua Dias, 11 - Piracicaba/SP. CEP: 13418-900 E-mail: [email protected] ÁREA TEMÁTICA: 6 - Agricultura e Meio Ambiente FORMA DE APRESENTAÇÃO: ORAL Apresentação com presidente da sessão e com a presença de debatedor 1
Transcript of Otimização da utilização de rotas rodoviárias segundo as ... · vem incentivando os...

Otimização da utilização de rotas rodoviárias segundo as óticas econômica e ambiental
Daniela Bacchi Bartholomeu Doutoranda em Economia Aplicada – ESALQ/USP
CPF: 273.182.668-10 Endereço: Av. Guerino Lubiani, 464 – Vila Verde. CEP: 13.420-823
José Vicente Caixeta Filho Professor Titular do Departamento de Economia, Administração e Sociologia da ESALQ/USP
CPF: 075965318-65 Endereço: Departamento de Economia, Administração e Sociologia -ESALQ/USP
Av. Pádua Dias, 11 - Piracicaba/SP. CEP: 13418-900 E-mail: [email protected]
ÁREA TEMÁTICA: 6 - Agricultura e Meio AmbienteFORMA DE APRESENTAÇÃO: ORAL
Apresentação com presidente da sessão e com a presença de debatedor
1
Otimização da utilização de rotas rodoviárias segundo as óticas econômica e ambiental
Resumo
Ao realizar uma viagem, o transportador deve escolher entre alguns caminhos alternativos existentes entre a origem e o destino, levando em conta os custos da viagem, as condições da rodovia, o tempo de viagem etc. Entretanto, após o processo de concessão das rodovias e o aumento do número de praças de pedágio, os caminhoneiros vêm preferindo percorrer as rotas de fuga dos postos de cobrança. Esses desvios pioram a situação de estradas vicinais, tornando as vantagens para o transportador questionáveis. O trabalho desenvolve um modelo matemático capaz de analisar se a hipótese adotada na prática pelos transportadores do estado de São Paulo está correta, isto é, se a rota alternativa aos pedágios é a mais econômica. Por outro lado, também verifica a existência de uma relação direta entre o estado de conservação da rodovia com o consumo de combustível (especificamente, de óleo diesel), ou seja, se rodovias bem conservadas resultam em menores emissões de CO2. Desta forma, foi adotado um modelo de programação linear para verificar qual a rota de menor custo e qual a que resulta em menor emissão. As alternativas ótimas apontadas serão coincidentes, isto é, o trajeto que minimiza custos é o mesmo que minimiza emissões? Nestes casos, os modelos sempre identificam as soluções ótimas, mas não indicam uma rota ótima em todos os sentidos, seja em termos econômicos, seja em termos ambientais. O melhor modelo, consequentemente, deve ser aquele que leve em consideração todos os objetivos simultaneamente. Desta forma, o artigo sugere a utilização da Programação por Metas, a qual permite, através da definição de prioridades, que todos os objetivos sejam perseguidos. Palavras-chave: programação linear, programação por metas, emissões
Otimização da utilização de rotas rodoviárias segundo as óticas econômica e ambiental
2
1 INTRODUÇÃO
O aumento do número de praças de pedágio após o processo de concessão das rodovias vem incentivando os caminhoneiros a usar rotas de fuga dos postos de cobrança. Esses desvios acabam piorando a situação de estradas vicinais municipais não projetadas para cargas pesadas, além de oferecer mais riscos às populações das cidades e aos próprios usuários das estradas.
Desta forma, as vantagens para o motorista acabam se tornando questionáveis, tanto do ponto de vista econômico, uma vez que, indiretamente, incorre-se em outros custos ao se utilizar rodovias alternativas, tais como: maior tempo de viagem, maiores riscos de assalto e acidente, maiores custos operacionais, maior consumo de combustível, entre outros. Consequentemente, também devem existir desvantagens em termos ambientais, uma vez que, se realmente rotas alternativas incorrem em maior consumo de combustível, acabam provocando maiores emissões de CO2.
Assim, o trabalho procura desenvolver um modelo matemático capaz de analisar se a hipótese adotada na prática pelos transportadores do estado de São Paulo está correta, isto é, se a rota alternativa aos pedágios é a mais econômica. Em outras palavras, se o transportador incorre em custos mais elevados ao optar transitar por uma rodovia bem conservada, devido à presença das praças de pedágio. Para tanto, foi adotado um modelo de programação linear, a partir do qual busca-se minimizar os custos de transporte entre a origem e o destino estudados.
Por outro lado, também verifica a existência de uma relação direta entre o estado de conservação da rodovia com o consumo de combustível (especificamente, de óleo diesel), ou seja, se rodovias bem conservadas resultam em menores emissões de CO2. Neste caso, também adotou-se um modelo de programação linear, mas que deve indicar a rota que minimiza as emissões de CO2.
Ao final do trabalho, é feita uma análise comparativa entre os resultados obtidos, a fim de verificar a possibilidade de se atingir uma escolha ótima no sentido de conciliar as rotas mais econômicas com as mais eficientes1 (se as rotas de mínimo custo também são aquelas de mínimas emissões). 2 REVISÃO DE LITERATURA 2.1 Fatores que influenciam nos custos de transporte Berger (1975), minimizando os custos de transporte para madeira de eucalipto, afirma que a distância é o fator mais importante no custo de transporte, mas também destaca outras características que podem alterar os custos, tais como, qualidade das estradas, intensidade do trânsito, densidade da produção e produto transportado. Correa Junior (2001) procurou identificar a influência de fatores para a determinação dos valores de frete praticados para o transporte de soja a granel com origem nos estados de Goiás, Mato Grosso e Paraná durante as safras de 1998 a 2000. Segundo o autor, os resultados mostraram que os valores de frete praticados no período foram influenciados por fatores como: a distância percorrida, a existência de praças de pedágio, o tempo de descarregamento nos portos, a sazonalidade da demanda por transporte e as condições das vias utilizadas.
1 Rota mais eficiente, neste caso, significa que o caminhão consome menor quantidade de combustível, resultando em menores emissões de CO2.
3
Dentre as conclusões mais importantes, Correa Junior (2001) obteve que a elevação dos custos operacionais (como por exemplo, o preço do óleo diesel) e a implantação de novas praças de pedágio entre 1999 e 2000 podem ter desfavorecido a preferência por melhores estradas. Além disso, as condições da via parecem ser um diferencial no caso do estado do Mato Grosso. 2.2 Pedágios e a questão das rodovias alternativas
Em rápida busca pela Internet, é possível encontrar milhares de artigos e notícias de jornais ou sites específicos tratando da questão do pedágio, das tarifas cobradas, do sistema de concessão implantado no Brasil, da satisfação/insatisfação do usuário frente à situação e mais especificamente sobre as tarifas cobradas, incentivos a utilização de rotas alternativas e fuga de pedágio, entre outros.
Esta seção tem como objetivo principal apresentar a importância do tema relacionado a questão de fuga de pedágio. Para tanto, cita-se algumas das matérias encontradas sobre o tema, discorrendo sobre alguns tópicos mais relevantes.
Algumas das matérias selecionadas são: • Brasil já tem mais rodovias pedagiadas que qualquer país do mundo
(http://www.estradas.com.br/materia_pedagios.htm) • Municípios criam pedágios nas estradas secundárias
(http://www.estradas.com.br/materia_pedagios.htm) • A oposição ao projeto afirma que o pedágio vai gerar fugas de caminhoneiros.
(http://www.novadutra.com.br/pergunta3.html) • Diversas notícias encontradas na home-page:
http://www.carrocampinas.com.br/materias/materia.asp?Id=146 • Fuga do pedágio destrói rodovias alternativas.
(http://www.milenio.com.br/milenio/noticias/ntc.asp?Cod=10642) • O barato sai caro. (http://www.rodoviasdascolinas.com.br/legislacao_02.php) • Supremo libera a pavimentação da rota alternativa
(http://www.jornalfarroupilha.com.br/editorial/geral/geral_0123a.htm). • No meio do caminho tinha o pedágio - Revista dos bancários edição 74, janeiro de 2001.
(http://www.spbancarios.com.br/rb74/rb2.htm), 2004. • Autoban busca parceria para evitar fuga
(http://www2.uol.com.br/tododia/ano98/julho/dia17/cidades.htm), 1998. • Nova Odessa deverá ter três pedágios
(http://www2.uol.com.br/tododia/ano99/maio/dia11/cidades.htm), 1999. • Rota de Fuga dos Pedágios - Ribeirão Preto. Informe SETCERGS. Número 478 , 15 de
Julho de 2002. Http://www.setcergs.com.br/informe/inf478.htm. • Transportadores avaliam a concessão de rodovias
http://www.ntc40anos.org.br/scripts/materiacompleta.asp?Cod=52&op=1 • Http://www.revistaocarreteiro.com.br/ano2001/Edicao321/pedagio.htm. • A cobrança de pedágio nas rodovias sob administração de concessionárias, encarada pelos
transportadores de cargas como um problema, devido ao alto custo que gera ao setor, está sendo contestada por um procurador da República no Estado do Rio Grande do Sul. Revista O Carreteiro Ano XXX - Nº 321 - Maio 2001. http://www.revistaocarreteiro.com.br/ano2004/Edicao362/infraestrutura.htm.
• INFRA-ESTRUTURA: O Custo Transporte. Revista O Carreteiro. Ano XXXII, nº 362.
4
• Fuga de pedágio causa transtornos. Http://www.uniara.com.br/ageuniara/artigos.asp?Artigo=1076.
• Http://www.cosmo.com.br/forum/topico.asp?M=3510&F=100&T=2421- 15/7/2003. • Estrada asfaltada a 2 semanas das eleições vira rota de fuga de pedágio
http://www.brasilcaminhoes.com.br/detalhes_noticia.asp?Codigo=771. 31/10/2004 Assim, a maioria delas afirma que os pedágios nas rodovias concedidas acabaram
estimulando os caminhoneiros a desviarem, buscando rotas sem pedágio, os quais muitas vezes, acabam passando por estradas estaduais secundárias ou estradas municipais. O tráfego pesado nestas rodovias vem afetando a vida de moradores de pequenas e médias cidades.
Na tentativa de economizar o dinheiro gasto com pedágio, alguns motoristas buscam rotas alternativas, que na maioria das vezes apresentam estado precário de conservação, são mal sinalizadas e sem condições de tráfego constante. As balanças e as barreiras policiais também são alvos constantes de fuga.
Decorrência disso, alguns prefeitos ou a concessionária cuja área de concessão está sofrendo com a fuga, praças de pedágios municipais foram ou vêm sendo construídas para evitar a evasão bem como minimizar os danos às estradas secundárias ou à própria cidade por onde passam. Normalmente nestes casos os veículos leves com placa da cidade são isentos ou têm descontos na tarifa, enquanto todos os veículos pesados são obrigados a pagar. Arujá, Nova Odessa, Boituva, Jacareí, Vinhedo são exemplos de cidades que passaram por esta situação.
Nas estradas da Região Metropolitana de Campinas (RMC), motoristas desviam de quatro dos sete pedágios por rotas alternativas, enfrentando pontes estreitas e rodovias em péssimas condições, a maioria em estradas de terra. A prática, que para alguns vem desde a transferência da administração para a iniciativa privada, para outros, inicia após o reajuste nas tarifas em 2004.
A AutoBAn estima que, em média, entre 2,5 mil e 3,5 mil veículos deixam de passar pelo pedágio diariamente, o que equivale a cerca de 10% a 15% do volume de tráfego normal.
A revolta de usuários já estimulou a criação de sites específicos, como o Anti-Pedágios, Odeio Pedágios, Velocidade.com entre outros, que inclusive dão dicas de rotas de fuga. Além disso, também existem mapas e cartilhas que são distribuídos entre os próprios motoristas com as rotas de fuga.
Um levantamento do DER aponta que o desvio do pedágio também está deteriorando as estradas utilizadas como vias alternativas para os motoristas que fogem do pagamento da tarifa no Paraná. Os dados apontam que 12,7% dos 10 mil quilômetros da malha pavimentada sob jurisdição do Estado fazem parte das chamadas rotas de fuga das rodovias pedagiadas.
Em geral, as vias que fazem parte das rotas de fuga são em sua maioria vicinais, preparadas para tráfego leve ou médio, mas acabam recebendo muitos caminhões.
Entidades representativas do setor de transportes informam que muitos caminhoneiros preferem percorrer um trecho maior a pagar o atual valor dos pedágios. Segundo o Sindicato das Empresas de Transportes de Cargas do Paraná (Cetcepar), nesse caso os motoristas acabam sofrendo a possibilidade de ter uma despesa ainda maior, como problemas mecânicos causados pela má conservação das vias.
O pedágio representa até 30% do custo do frete, afirma o presidente do Movimento União Brasil Caminhoneiro, Nelson Canan. Além disso, o gasto com pedágio nas despesas de viagem de um caminhão subiu de 5%, antes das privatizações, para quase 30% depois, segundo dados apresentados por Neuto Reis, da NTC.
5
De acordo com cálculos do Sindicato das Empresas de Transporte de Cargas de Ribeirão Preto e Região (SINDETRANS), as empresas de transporte de carga da região gastam em média 27% do faturamento bruto em pedágio. Com óleo diesel, as empresas consomem 23% em média.
Segundo avaliação de empresas transportadoras, o pedágio já responde por 17% a 25% dos custos operacionais. Portanto, nota-se que os percentuais atribuídos pelos diferentes agentes ao pedágio são bastante semelhantes.
Segundo estudos realizados pela NTC, dos 170 mil quilômetros de rodovias brasileiras asfaltadas, quase 6% estão nas mãos da iniciativa privada, enquanto a média mundial é de 2%. Já são cerca de trezentos os pontos de cobrança de pedágio, somente em rodovias estaduais e federais. Os Estados Unidos, com malha rodoviária vinte vezes maior que a brasileira, têm 7.150 quilômetros de rodovias com pedágios, contra 9.500 quilômetros do Brasil.
Como benefícios aos usuários, pode-se citar: serviços de socorro mecânico, guincho, ambulâncias, painéis eletrônicos de informações, telefones de emergência, duplicações de pistas, alargamento de marginais.
Além disso, outros aspectos positivos são a geração de empregos, a melhoria da malha rodoviária, o desenvolvimento tecnológico, a eliminação de gargalos (engarrafamento) e a própria reestruturação do DNER (Departamento Nacional de Estradas de Rodagem). 2.3 Matrizes de Origem-Destino A primeira aplicação das técnicas de programação linear no campo da economia foi na área da interindústria, ou análise de insumo-produto (Koopmans, 19512, Leontief, 19513 e Morgenstern, 19544, citados por Gass, 1994). Numa matriz insumo-produto, analisa-se as inter-relações das indústrias de uma economia. Assim, cada elemento da matriz insumo-produto representa o total de vendas de cada indústria para as demais (e inclusive para ela mesma), ocorrido no período de tempo tomado como base (1 ano, por exemplo).
De acordo com Martins (1998, p.57), a “movimentação de qualquer mercadoria envolve um processo de escolha da modalidade de transporte mais adequada. Isto refere-se a determinar a modalidade de transporte mais competitiva, conjugando fatores estritamente econômicos (menor custo) e fatores qualitativos (segurança e rapidez, por exemplo).” No caso deste trabalho a mesma lógica pode ser adotada, mas deve-se substituir a escolha da “modalidade mais adequada” pela “rota mais competitiva”, uma vez que o modal já esta definido (rodoviário). O mesmo autor, citando Hamerslag & Immers (1980)5, afirma que a matriz de origem-destino (O/D) constitui um instrumental útil para variadas finalidades relacionadas a estudos de transporte, tais como planejamento, simulação de fluxos de mercadorias, pessoas ou veículos, bem como para avaliação de alternativas. Em termos de construção teórica e de operacionalização, Martins (1998) destaca que a matriz de origem-destino assemelha-se à matriz de insumo-produto; a diferença consiste no fato
2 Koopmans, T.C. (ed.) Activity Analysis of Production and Allocation. Cowles Commission Monograph 13. John Wiley & Sons, Inc. New York, 1951. 3 Leontief, W.W. The Structure of the American Economy, 1919-1929. Oxford University Press. New York, 1951. 4 Morgenstern, O. (ed.) Economic Activity Analysis. John Wiley & Sons, Inc. New York, 1954. 5 HAMERSLAG, R.; IMMERS, B.H. Estimation of trip matrices: shortcomings and possibilities for improvement. Transportation Research Record 1203, p.27-39, 1988.
6
de que esta descreve relações entre quantidades físicas (fluxos de produtos ou de viagens), enquanto aquela está relacionada à movimentação de quantidades monetárias intersetoriais.
A matriz O/D também pode ser usada como instrumental para avaliação da infra-estrutura de transportes, assim como feito no estudo da Organização das Nações Unidas (ONU)6 para o Vietnã. A partir de uma única amostragem feita em 1990 e sem ter considerado variações sazonais, o trabalho buscava avaliar a adequação da infra-estrutura de transportes, através de diferentes cenários de produção e consumo para o ano de 2000 (Martins, 1998).
Martins (1998) cita estudo realizado em Ontário, Canadá7, cujo objetivo era avaliar as possibilidades de redução de CO2, através de rotas alternativas para cargas originadas e destinadas aquele município. Foi realizada uma amostragem baseada na seleção de indústrias e companhias representativas para produtos selecionados e adotada a matriz de O/D para análise.
Para a obtenção destas matrizes são utilizadas diferentes metodologias, algumas das quais são descritas em Martins (1998).
Segundo GEIPOT (1969)8, dados de volume e da configuração do tráfego (a partir de informações sobre origens e destinos) são imprescindíveis para a avaliação de um sistema de transportes. Um grande problema ao se trabalhar com o transporte de mercadorias, segundo Hoel (1974)9, citado por Martins (1998), é a obtenção dos dados, uma vez que os registros dos fluxos de mercadorias entre cidades estão pulverizados e de conhecimento pelas empresas transportadoras. Assim, fatores como os locacionais; a dispersão geográfica das firmas; a variedade de produtos e suas condições físicas; as variações sazonais na demanda pelo serviço de transporte; e as condições dos valores dos fretes, que variam conforme o nível de demanda requerido, caracterizam o transporte de mercadorias. Estudos de distribuição entre pontos de origem e destino podem ser auxiliados por modelo gravitacional ou de programação linear. Resumidamente, o modelo gravitacional trabalha com a hipótese de que os fluxos entre as zonas são diretamente proporcionais à capacidade de atração entre elas e inversamente proporcionais a uma função correspondente à impedância entre as zonas. A função de impedância pode ser interpretada por parâmetros (ajustados por algum ripo de análise de regressão), como tempo de viagem, custo de transporte, distância física ou distância real (Martins, 1998). Conforme Roberts (1974), citado por Martins (1998), modelos de programação linear produzem soluções satisfatórias para estudos que avaliam problemas de transporte para produtos homogêneos. 2.4 Modelos de transporte O problema típico de transporte é formulado num modelo que vise determinar os fluxos de produtos entre regiões (produtoras e consumidoras), que minimizam o custo de transporte.
6 Informações em: http://www.serve.net/vietnam/pages/viet0652.htm. 7 Informações em: http://www.web.apc.org/users/ortee/transportation/report7/chap3.html. 8 GEIPOT. Empresa Brasileira de Planejamento de Transportes. Estudo de transportes do Brasil: estudos rodoviários. Brasília: Ministério dos Transportes/GEIPOT, 1969. (Vol. XII-A – Coordenação dos estudos: princípios, metodologia e procedimentos) 9 HOEL, L.A. Systems planning and programming methodology freight movement. TRB – Special Record 146, 1974.
7

De maneira genérica, o modelo de transporte é formulado como (Kanafani, 198310, citado por Martins, 1998, e Caixeta-Filho, 2004)
Min Z = (1) xc ij
m
i
n
jij∑∑
= =1 1
sujeito a:
sx i
n
jij≤∑
=1 e e , para i = 1, ..., m; j = 1, ..., n, dx j
m
iij≥∑
=10≥xij
onde: Z = função de custo total de transporte; cij = custo de distribuição entre a origem i e o destino j, por unidade do produto; xij = total a ser distribuído de i até j (fluxos do produto); si = total produzido/ofertado pela região i; dj = total demandado pela região j. A solução por programação linear deste modelo pode atribuir como impedância a distância rodoviária entre os pólos ou até mesmo o tempo de viagem.
Deve-se destacar que o modelo de transporte assume a pressuposição de que os custos de transporte são considerados independentes das quantidades movimentadas. Na prática, entretanto, sabe-se que o custo unitário de transporte tende a diminuir conforme a quantidade aumenta.
Segundo Berger (1975), a pressuposição relativa à linearidade das variáveis do modelo não representa fator limitante quanto aos resultados, uma vez que trata-se de volumes físicos, os quais podem ser somados ou subtraídos, sem implicações para os resultados que serão usados na prática. 2.5 Pesquisas Empíricas
Os modelos de transporte têm sido bastante utilizados, principalmente a partir da década de 1950, seja para determinar localização e tamanho ótimo de fábricas, depósitos, entre outros, seja para minimizar custos de transporte entre centros produtores e consumidores.
Segundo Gass (1994), uma das primeiras aplicações das técnicas de programação linear foi para resolução de problemas de transporte. De acordo com o autor, o problema básico foi originalmente mencionado por Hitchcock (1941)11 e posteriormente discutido em detalhes por Koopmans (1949)12, sendo que uma aproximação anterior havia sido dada por Dantzig13.
Especificamente para a questão de minimização de custos de transporte, Berger (1975), cita Figueiredo et al. (1974), os quais buscaram racionalizar a distribuição de álcool anidro na safra 1973/74 de 27 usinas do Estado de São Paulo para os centros de mistura carburante.
10 KANAFANI, A.K. Transportation demand analysis. Berkeley: McGraw-Hill, 1983. 11 Hitchcock, F.L. Distribution of a Product from Several Sources to Numerous Localities. Journal of Mathematical Physics, vol. 20. 1941. 12 Koopmans, T.C. Optimum Utilization of the Transportation System. Econometrica, vol. 17, supplement. 1949. 13 Dantzig, G.B. Application of the Simplex Method to a Transportation Problem. Cap. 23 de Koopmans, 1949.
8
Amaro et al. (1973), também citados por Berger (1975), aplicaram três modelos para análise da citricultura paulista: no modelo A, buscou-se minimizar o custo individual das fábricas de suco; no modelo B, o objetivo foi a minimização do custo total de transporte, e, no modelo C, foram introduzidas três possíveis localizações de novas fábricas.
Berger (1975) também utilizou o modelo de transporte para determinar as quantidades de madeira de eucalipto a serem transportadas das regiões produtoras até os centros consumidores, visando a minimização dos custos individual e total de transporte.
O GEIPOT realizou vários estudos utilizando o modelagem de problemas de transporte em rede para determinar rotas de menor custo e avaliar a infra-estrutura de transporte nos corredores de exportação no Brasil.
Douherty (1995), citado por Martins (1998), também realizou valiosa revisão de literatura de artigos de publicação internacional entre os anos de 1990 e 1995, identificando diversas formas de modelos de rede aplicadas aos problemas de transporte. 3 METODOLOGIA 3.1 Programação Linear
O modelo de programação linear adotado objetiva verificar qual a rota de menor custo e qual a que resulta em menor emissão. As alternativas ótimas apontadas serão coincidentes, isto é, o trajeto que minimiza custos é o mesmo que minimiza emissões? Este seria o resultado desejado... Não é objetivo do trabalho delimitar a análise em apenas um produto; pelo contrário, pretende-se analisar as rotas mais freqüentes e importantes no estado de São Paulo que possuem trajetos alternativos, independentes da mercadoria. Desta forma, não é possível estimar ou obter os fluxos destas mercadorias num curto espaço de tempo. Conseqüentemente, neste caso, no modelo de transporte, a variável xij não indicará fluxo de mercadorias, como detalhado em seção anterior.
Para se alcançar os objetivos propostos pelo trabalho, cinco modelos de programação linear foram utilizados. O primeiro refere-se à minimização da distância percorrida, que indiretamente poderia estar indicando a rota de menor custo. A respeito dos custos de transporte, o segundo modelo deve apontar a alternativa mais econômica para transportar uma mercadoria entre a origem i e o destino j. O terceiro buscou minimizar o consumo de combustível, a fim de apontar a rota que minimiza as emissões de CO2. Os resultados deste modelo deverão indicar a alternativa mais eficiente em termos energéticos para transportar uma mercadoria entre a origem i e o destino j. O quarto modelo tem como função objetivo a minimização do número de praças de pedágio e, finalmente, o último modelo pretendeu indicar a rota cujo tempo de viagem é mínimo. Inicialmente sem restrições, cada modelo determina, então, a rota ótima que minimiza fretes, emissões (decorrentes do consumo de combustível), número de praças de pedágio e tempo de viagem. Em seguida, foram impostas algumas restrições. Os valores para as restrições foram adotados com base nos resultados obtidos das primeiras simulações, irrestritas. Modelo A
9

O modelo A, portanto, procurou minimizar a distância percorrida. Os dados referentes à distância em quilômetros podem ser obtidos via um roterizador como, por exemplo da Associação Brasileira de Concessionárias de Rodovias (ABCR)14. Assim, tem-se:
Min Z = (2) XD j
n
jj∑
=1
onde: Z = valor da função objetivo; Dj = distância associada à rota j, em quilômetros; Xj = parâmetro tipo zero-um, associado à rota a ser percorrida.
Como a origem e o destino são únicos para cada rota, o índice j pode ser entendido como a alternativa a ser percorrida para chegar em Dj. O valor de n refere-se às possibilidades existentes para percorrer a rota da origem i até o destino j. Se existem duas rotas alternativas, então n=2. A rota 1 é definida como tendo bom estado de conservação, enquanto a rota 2 é a rota alternativa, em condições mais precárias. Modelo B
Num segundo momento, o modelo de transporte considerou o frete15 de cada alternativa, onde o objetivo foi a minimização do custo total de transporte. Como os valores de frete já incluem o equivalente a ser pago de pedágio, deve ser calculado o valor total gasto pelo veículo (carreta, truck etc) ao percorrer cada alternativa. Este valor, então, deve ser subtraído do valor do frete (em R$) da respectiva alternativa. Desta forma, tem-se:
Min Z = (3) XF j
n
jj∑
=1
onde: Z = valor da função objetivo; Fj = frete associado à rota j, em R$; Xj = parâmetro tipo zero-um, associado à rota a ser percorrida. Modelo C
O terceiro modelo indica a rota com menores emissões de CO2 resultantes. Para tanto,
podem ser utilizados como referência valores obtidos em estudo de Bartholomeu (2001), onde a rodovia concedida à iniciativa privada resultava num consumo especifico de combustível16, por um caminhão truck, da ordem de 2,72 l.t/100km, enquanto na rodovia alternativa, este valor era 4,40 l.t/100km. Desta maneira, estes valores são adaptados para o consumo de uma carreta (que
14 Home-page: http://www.abcr.org.br. Acesso em: 15/12/2004. 15 Os valores de frete podem ser obtidos através do banco de dados do Sistema de Informações de Fretes (Sifreca). Home-page: http://sifreca.esalq.usp.br. 16 O combustível considerado no presente estudo é o óleo diesel.
10
tem capacidade para transportar 27 t e para cada rota envolvida, através da distância, dada em km.
Com estes dados, pode-se obter o consumo de combustível da viagem, apenas multiplicando pela distância percorrida entre a origem e o destino em questão. Para calcular as emissões, basta multiplicar o consumo de combustível de cada rota por 2,695, que é o fator de conversão adotado17. Assim, para minimizar as emissões de CO2, o seguinte modelo de transporte pode ser adotado:
Min Z = (4) XC j
n
jj∑
=1
onde: Z = valor da função objetivo; Cj = consumo de combustível associado à rota j, em litros; Xj = parâmetro tipo zero-um, associado à rota a ser percorrida. Modelo D
O quarto modelo indica a rota com menor número de praças de pedágio.
Min Z = (5) XP j
n
jj∑
=1
onde: Z = valor da função objetivo; Pj = número de praças de pedágio associado à rota j; Xj = parâmetro tipo zero-um, associado à rota a ser percorrida. Modelo E O modelo E, por sua vez, busca minimizar o tempo total gasto na viagem.
Min Z = (6) XT j
n
jj∑
=1
onde: Z = valor da função objetivo; Tj = tempo de viagem associado à rota j, em minutos; Xj= parâmetro tipo zero-um, associado à rota a ser percorrida. Restrições:
Para todos estes modelos, foi considerada inicialmente a seguinte restrição:
a) existe a possibilidade de escolher somente uma rota a ser percorrida, isto é:
17 No referido estudo considerou-se que 1 litro de diesel emite 2,695 kg de CO2.
11
11
=∑=
n
jjX (7)
onde: Xj = variável binária tipo zero-um, associada à rota a ser percorrida. Para o processamento das informações, pode ser utilizado o software General Algebraic Modeling System (GAMS). Em seguida, os valores ótimos obtidos em cada modelo foram transformados em restrições e adicionados aos Modelos A, B, C, D e E. Isto foi feito primeiro de forma individual (por exemplo: no Modelo C que visa minimizar o consumo de combustível foi introduzida uma restrição relativa ao frete; em seguida, retirou-se esta restrição e adicionou-se outra, referente ao tempo de viagem, e assim por diante); depois, todas as restrições simultaneamente.
Assim, os modelos A, B, C, D e E ficaram, de forma genérica:
Min Z = (8) XW j
n
jj∑
=1
onde: Wi = corresponde aos parâmetros Dj (distância para a rota j, em km); Fj (frete para a rota j, em R$); Cj (consumo de combustível para a rota j, em litros); ou Pj (número de praças de pedágio para a rota j). Restrições: a) existe a possibilidade de escolher somente uma rota a ser percorrida, isto é:
11
=∑=
n
jjX (9)
onde: Xj = variável binária tipo zero-um, associada à rota a ser percorrida. b) A distância percorrida não deve ultrapassar aquela obtida na resolução do modelo A sem restrições:
aXD j
n
jj ≤∑
=1 (10)
onde: a = valor ótimo de quilometragem obtido pela minimização da distância. c) O valor do frete não deve ultrapassar aquele obtido na resolução do modelo B sem restrições:
bXF j
n
jj ≤∑
=1 (11)
onde:
12
b = valor ótimo de frete obtido pela minimização do frete. d) O consumo de combustível não deve ultrapassar aquele obtido na resolução do modelo C sem restrições:
cXC j
n
jj ≤∑
=1 (12)
onde: c = quantidade ótima de diesel, obtida pela minimização do consumo de combustível. e) O número de praças de pedágio não deve ultrapassar aquele obtido na resolução do modelo D sem restrições:
dXP j
n
jj ≤∑
=1 (13)
onde: d = quantidade ótima de praças de pedágio, obtida pela minimização da função objetivo respectiva. f) O tempo total de viagem não deve ultrapassar aquele obtido na resolução do modelo E sem restrições:
eXT j
n
jj ≤∑
=1 (14)
onde: e = tempo ótimo de viagem, obtido pela minimização da respectiva função objetivo. Logicamente, a restrição referente ao parâmetro da função objetivo em questão não foi considerada.
Após as simulações individuais com cada restrição, o modelo com todas as restrições simultaneamente ficaria:
Min Z = (15)
XC j
n
jj∑
=1
onde: Z = valor da função objetivo; Cj = consumo de combustível entre a origem i e o destino j, em litros; Xj = parâmetro tipo zero-um, associado à rota a ser percorrida; Restrições:
a) (16) 11
=∑=
n
jjX
13
b) (17) aXD j
n
jj ≤∑
=1
c) (18) bXF j
n
jj ≤∑
=1
d) (19) dXP j
n
jj ≤∑
=1
e) (20) eXT j
n
jj ≤∑
=1
3.2 Programação Linear Multiobjetivo / Multicritério De acordo com Gass (1994), muitos problemas práticos possuem múltiplos objetivos a serem otimizados simultaneamente. Tais objetivos freqüentemente entram em conflito, sendo difícil, quando não impossível, encontrar uma solução que contemple a otimização simultânea. Neste trabalho, ocorre situação similar, uma vez que pretende-se otimizar a utilização de rotas segundo as óticas ambiental (minimização de emissões) e econômica (minimização dos custos com tarifas de pedágio). Desta forma, esta seção descreve, baseando-se em Gass (1994), a metodologia a ser aplicada de acordo com a Programação Linear Multiobjetivo ou Multicritério. Os problemas multiobjetivos, cujas restrições e seus múltiplos objetivos são expressos por funções lineares, buscam determinar uma solução que representa uma troca aceitável entre os objetivos, ou determinar um conjunto de soluções que permitam ao tomador de decisão escolher entre eles. Formalmente, o problema linear multiobjetivo é definido como segue: dado um vetor de custos denotado por ck = (ck1, ..., ckn), k = 1, ..., p, e o conjunto de m x n restrições AX = b e X ≥ 0. Assim, cada ckX define uma função objetivo linear a ser otimizada (neste caso, minimizada) sujeita as restrições. Tem-se então, na notação matricial*:
Minimizar
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
Xc
XcXc
p
M2
1
Sujeito a: AX = b (21) X ≥ 0 (22) De forma concisa, tem-se: Minimizar: CX (23) Sujeito a: AX = b (24) X ≥ 0 (25)
14
Onde: C = =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
pc
cc
M2
1
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
pnp
n
n
cc
cccc
L
M
L
L
1
221
111
Existirá uma solução eficiente (X0) para o problema se não existe outra solução X tal que CX ≥ CX0 e CX ≠ CX0. Um meio de tentar atingir uma troca apropriada entre múltiplos objetivos é atribuir pesos positivos para cada um, onde o peso reflete a importância da função objetivo correspondente. Como os pesos frequentemente não são exatos nem determináveis, o interesse é descobrir todas as soluções para todos os valores positivos dos parâmetros e relacionar estas soluções ao conceito de soluções eficientes. Generalizando, um problema multiobjetivo ou multiparâmetro é caracterizado como:
Min Z = (26) ∑=
=p
kkk CXXc
1)()( λλ
Sujeito a: AX = b (27) X ≥ 0 (28) Onde: λ = (λ1, ..., λp) e todo λk > 0.
É possível restringir os pesos de cada função tal que a somatória seja unitária, isto é: ∑ =1kλ (29) 3.3 Programação por Metas
A Programação por Metas é um método de tomada de decisão multi-critérios utilizado para resolver problemas que contemplem múltiplos objetivos (Gass & Harris, 199618, citado por Cunha, 2001). Numa Programação por Metas, a função objetivo será sempre uma função de minimização, composta pela soma dos desvios (negativos e/ou positivos) que se pretende minimizar.
O conceito de Programação por Metas, bastante semelhante ao conceito de Programação Linear, foi introduzido por Charnes e Cooper, sendo, posteriormente, desenvolvido por Ijiri, Lee e outros (Lee et al., 199019, citados por Cunha, 2001).
Segundo Ravindran et al. (1986)20, citados por (Cunha, 2001), a programação por metas pode ser aplicada em diversos problemas de planejamento nos quais os objetivos são multidimensionais e não diretamente comparáveis.
18 GASS, S. I.; HARRIS, C. M. Encyclopedia of operations research & management science. London: Kluwer Academic Publishers, 1996. 753p. 19 LEE, S. M.: MOORE, L. J.; TAYLOR, B. W. Management science. 3.ed. Boston: Allyn and Bacon, 1990, 901p.
15
Entre as principais diferenças da Programação Linear e por Metas está o fato de que, no primeiro caso, os modelos são desenvolvidos considerando-se apenas um objetivo a ser otimizado. Um modo de considerar múltiplos objetivos é selecionar um deles como principal e os demais como secundários. De acordo com Cunha (2001), o objetivo principal seria usado como medida de otimização, enquanto os secundários seriam tratados como “restrições” do problema, atribuindo-se valores mínimos e/ou máximos a eles. A autora afirma ainda que, caso os níveis de nivelamento não forem determinados de maneira cuidadosa, pode não existir uma solução ótima que satisfaça todas as restrições simultaneamente. Desta forma, a técnica de programação por metas se torna uma alternativa interessante para problemas com múltiplos objetivos.
Assim, para cada objetivo é determinado um nível (ou uma meta) que deverá ser atingido. As metas a serem atingidas são representadas dos lados direitos das equações (ou, Right-Hand-Side – RHS). No lado esquerdo das equações (ou Left-Hand-Side – LHS), além das variáveis, existirão dois termos denominados desvio positivo e desvio negativo. O primeiro corresponde ao valor em que a meta ficará acima do nível estabelecido como meta; o segundo refere-se ao valor que contribui para uma redução no valor estabelecido como meta. Se ambos os desvios, o positivo e o negativo, são iguais a zero, então a meta foi atingida (Cunha, 2001).
As metas, entretanto, diferem-se das restrições pelo fato de que representam condições que devem ser atingidas, mas que não são obrigatórias ou restritivas. Para tanto, são introduzidos, nas metas, desvios negativos (di
-) e positivos (di+) em relação ao objetivo inicial a ser atingido
(equação 30). x1 + x 2 + di
- – di+ = b (30)
sendo di
+, di- ≥ 0 (31)
Percebe-se que se di
- > 0, então x1 + x 2 < b e se di+ > 0, então x1 + x 2 > b.
Com relação à função objetivo, que deve ser minimizada, são atribuídos pesos adequados a cada um dos desvios (wi
- e wi+) para di
- e di+, respectivamente, como mostra a equação (32).
Min Z = wi
- di- + wi
+ di+ (32)
O modelo tentará aproximar a soma x1 + x 2 ao valor de b. Se a meta é satisfazer x1 + x 2 ≥ b, então deverá ser atribuído um valor positivo a di
+, enquanto o peso di- deverá ser igual a zero.
Muitas vezes, entretanto, os desvios têm unidades diferentes, tornando difícil ou até mesmo impossível uma atribuição de pesos adequada. No caso, por exemplo, de uma empresa que deseja minimizar custos de transporte e também a emissão de poluentes, os objetivos são incomensuráveis, já que o primeiro é medido em unidades monetárias, enquanto o segundo, em toneladas de determinado gás. Para resolver esta incompatibilidade de medidas, na programação por metas devem ser definidas as prioridades para cada objetivo, através de uma classificação ordinal. Os pesos dos desvios são definidos dentro de cada nível de prioridade. A função objetivo ficaria descrita conforme a equação (33) (Cunha, 2001).
Min (33) )
( −−++ += ∑ ∑ iikik i
ikk dwdwPZ
20 RAVINDRAN, A.; PHILIPS, D. T.; SOLBERG, J. J. Operations Research: principles and practice. 2.ed. New York: John Wiley & Sons, 1986. 637p.
16

onde Pk representa a prioridade k, sendo que Pk é maior que Pk+1, e e são os pesos atribuídos à variável relacionada ao i-ésimo desvio da prioridade k. Assim, níveis de prioridade mais baixos serão considerados após os níveis de prioridades mais altos terem sido atingidos.
+ikw −
ikw
O modelo geral de Programação por Metas pode se expresso do seguinte modo:
Min (34) )(1
−−+
=
+ += ∑ iiki
m
ii dwdwZ
sujeito a:
∑=
+− =−+n
jiiijij bddxa
1 para todo i (35)
xj, , ≥ 0 para todo i e j (36) −id +
id A equação (35) representa a função objetivo que minimiza a soma ponderada dos desvios;
a equação (35) representa o conjunto de restrições associadas a cada meta e a expressão (36) representa as restrições padrão de não-negatividade de todas as variáveis.
Como a programação por metas é uma forma de programação linear, aquele também deve ser formulado sob as mesmas hipóteses, limitações e condições da programação linear, tais como linearidade, divisibilidade e característica determinística. Além disso, da mesma forma que os problemas de programação linear, a programação por metas também pode ser resolvida utilizando-se o método Simplex. O Simplex é um algoritmo que, utilizando-se de processos iterativos, leva à solução ótima de um problema (Lee et al., 1990, citados por Cunha, 2001).
Cunha (2001), após testar alguns modelos para seu problema21, preferiu utilizar programação não-linear em sua tese. Um dos benefícios desta escolha foi que a densidade pôde ser calculada endogenamente, o que não seria possível num modelo linear. Ao introduzir prioridades na resolução do problema de programação por metas, foram testadas três ordenações possíveis para as nove metas estabelecidas.
Para resolver o modelo que inclui prioridades, Cunha (2001) dividiu o modelo completo (Anexo J da tese) em alguns subproblemas. O primeiro deles contém apenas a primeira meta. Nos modelos subseqüentes, os resultados de cada subproblema são incluídos como parâmetros do novo subproblema. Por exemplo, ao se considerar as duas primeiras metas, processa-se o primeiro modelo considerando-se apenas as equações e inequações relacionadas a primeira meta. Em seguida, processa-se um novo modelo onde os resultados referentes a primeira meta são inseridos como parâmetros do novo modelo. Alem disso, neste novo modelo também são inseridas as equações e inequações relacionadas a segunda meta.
4 RESULTADOS Na primeira etapa das simulações, em que não são consideradas outras restrições além daquela referente à variável binária, os modelos sempre identificam as soluções ótimas. Entretanto, neste tipo de modelagem não existe uma rota ótima em todos os sentidos, seja em termos econômicos, seja em termos ambientais. Em geral, parâmetros que consideram, direta ou indiretamente, os impactos do pedágio, apontam para uma solução ótima semelhante. Entretanto, a
21 A autora aplicou modelos matemáticos de otimização que consideram diversos objetivos simultaneamente, para auxiliar no aprimoramento da gestão tática e operacional da coleta de resíduos sólidos urbanos.
17

rota ótima nestes casos não deve equivaler àquela indicada pelos modelos de minimização de distância, consumo de combustível e tempo de viagem. Assim, o tomador de decisão deve saber exatamente o que quer minimizar (a distância a ser percorrida, as emissões de CO2, o tempo total de viagem, o frete ou o pedágio) antes de escolher a qual rota percorrer. Num segundo momento, foram sendo, uma a uma, adicionadas restrições a estes 5 modelos. O valor atribuído às restrições determina se existe ou não solução ótima. Por exemplo, no Modelo C (minimização do consumo de combustível), quando é adicionada a restrição de número máximo de praças de pedágio, tem-se a seguinte situação: se a rota 1 possui 3 praças, enquanto a alternativa não possui praças, e atribui-se uma restrição de valor igual ou maior a 3, existe solução ótima, e esta apontará a rota 1 como melhor opção para minimizar emissões. Entretanto, se o valor máximo da restrição for menor do que 3, o problema passa a não ter mais solução, pois a restrição impede que exista uma solução ótima. Neste caso, tem-se um problema impossível de ser solucionado. Conclui-se, assim, que os valores máximos atribuídos às restrições devem ser iguais ou maiores do que o maior valor observado. Portanto, as restrições devem ser não atuantes (ter folga) para que seja possível uma solução viável. Feitas estas observações, um modelo alternativo a ser testado é aquele que considera todos os objetivos simultaneamente. A Programação por Metas deve ser aquela que atende aos objetivos do trabalho, de minimizar as emissões de CO2 e, ao mesmo tempo, minimizar os gastos com pedágio. Isto porque este tipo de modelagem permite que objetivos incomensuráveis sejam alcançados, através da atribuição de prioridades a cada uma das metas a serem atingidas. Além disso, pode-se também considerar outros objetivos, secundários, tais como, minimização da distância a ser percorrida, do tempo de viagem, do número de praças de pedágio, do consumo de combustível e maximização da velocidade média.
O modelo apresentaria um total de 7 metas, com prioridades distintas (Pi), sendo que P1 > P2 > P3 > P4 > P5 > P6 > P7.
A seguir, são descritas cada uma das metas, ao passo que irá se compodo a função objetivo.
• Meta 1 (M1): minimizar as emissões de CO2 x1 + x2 + d1
- - d1+ = b1 (38)
Neste caso, d1
+ = 0 e d1- > 0; portanto, tem-se:
x1 + x2 + d1- = b1 (39)
A função objetivo seria representada conforme a equação (40): min Z = P1d1
- (40)
• Meta 2 (M2): minimizar o gasto com tarifa de pedágio x1 + x2 + d2
- - d2+ = b2 (41)
Neste caso, d2
+ = 0 e d2- > 0; portanto, tem-se:
x1 + x2 + d2- = b2 (42)
18
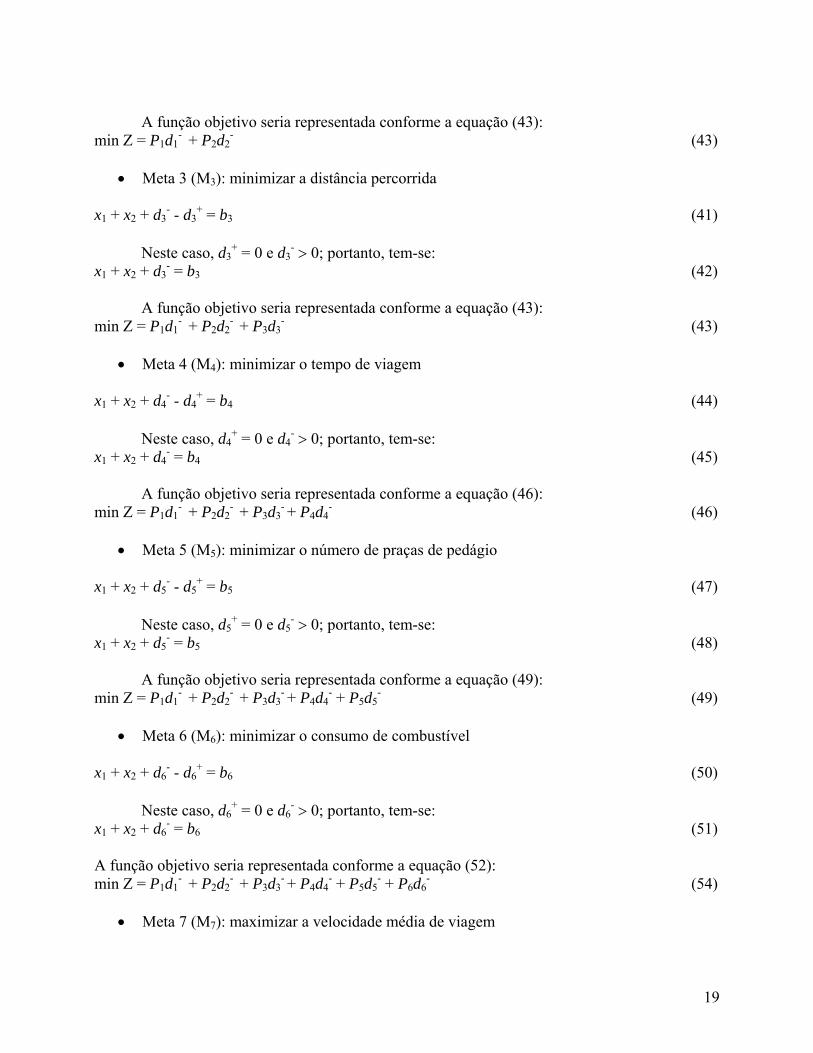
A função objetivo seria representada conforme a equação (43): min Z = P1d1
- + P2d2- (43)
• Meta 3 (M3): minimizar a distância percorrida
x1 + x2 + d3
- - d3+ = b3 (41)
Neste caso, d3
+ = 0 e d3- > 0; portanto, tem-se:
x1 + x2 + d3- = b3 (42)
A função objetivo seria representada conforme a equação (43): min Z = P1d1
- + P2d2- + P3d3
- (43)
• Meta 4 (M4): minimizar o tempo de viagem x1 + x2 + d4
- - d4+ = b4 (44)
Neste caso, d4
+ = 0 e d4- > 0; portanto, tem-se:
x1 + x2 + d4- = b4 (45)
A função objetivo seria representada conforme a equação (46): min Z = P1d1
- + P2d2- + P3d3
- + P4d4- (46)
• Meta 5 (M5): minimizar o número de praças de pedágio
x1 + x2 + d5
- - d5+ = b5 (47)
Neste caso, d5
+ = 0 e d5- > 0; portanto, tem-se:
x1 + x2 + d5- = b5 (48)
A função objetivo seria representada conforme a equação (49): min Z = P1d1
- + P2d2- + P3d3
- + P4d4- + P5d5
- (49)
• Meta 6 (M6): minimizar o consumo de combustível x1 + x2 + d6
- - d6+ = b6 (50)
Neste caso, d6
+ = 0 e d6- > 0; portanto, tem-se:
x1 + x2 + d6- = b6 (51)
A função objetivo seria representada conforme a equação (52): min Z = P1d1
- + P2d2- + P3d3
- + P4d4- + P5d5
- + P6d6- (54)
• Meta 7 (M7): maximizar a velocidade média de viagem
19

x1 + x2 + d7- - d7
+ = b7 (55) Neste caso, d7
+ > 0 e d7- = 0; portanto, tem-se:
x1 + x2 + d7- = b7 (56)
A função objetivo seria representada conforme a equação (57): min Z = P1d1
- + P2d2- + P3d3
- + P4d4- + P5d5
- + P6d6- + P7d7
- (58)
Portanto, se a prioridade do transportador é minimizar as emissões de CO2, então a função objetivo adequada para este problema ficaria descrita conforme a equação (59).
Min (59) )(2
1
7
1
−−+
=
+
=
+= ∑∑ iikii
ikk
k dwdwPZ
onde Pk representa a prioridade k; P1 é maior que P2, e e são os pesos atribuídos à variável relacionada ao i-ésimo desvio da prioridade k. Assim, níveis de prioridade mais baixos serão considerados após os níveis de prioridades mais altos terem sido atingidos.
−kw1
−kw2
O modelo geral de Programação por Metas pode se expresso do seguinte modo:
)(min2
1
7
1
−−+
=
+
=
+= ∑∑ iikii
ikk
k dwdwPZ (60)
sujeito a:
∑=
+− =−+7
1kiiikik bddxa para todo i (61)
xk, , ≥ 0 para todo i e j (62) −id +
id
5 CONCLUSÕES Como não foi possível encontrar uma rota ótima em todos os sentidos nos dois primeiros
modelos sugeridos (Programação Linear com e sem restições), isto é, o motorista deve escolher se pretende minimizar custos ou impactos ambientais, mas não conseguirá conciliar os dois objetivos numa alternativa só, optou-se por propor um modelo que leve em consideração todos os objetivos.
Desta forma, o artigo sugere a utilização da Programação por Metas, a qual permite, através da definição de prioridades, que todos os objetivos sejam perseguidos. Assim, se a principal preocupação do motorista é a questão ambiental, por exemplo, ele deve atribuir uma prioridade superior a este objetivo em relação aos demais. Da mesma forma, se o motorista está mais interessado em pagar menor tarifa de pedágio ao longo do trajeto, deve-se atribuir uma prioridade mais elevada a este objetivo.
Além desses objetivos, o modelo também considera outros, de menor importância para este estudo, mas que podem ser eleitos como as prioridades de um determinado transportador. São eles: minimizar a distância percorrida; o tempo de viagem, o número de praças de pedágio ao longo do trajeto e, maximizar a velocidade média da viagem.
20
Referências bibliográficas BERGER, R. Minimização do custo de transporte de Madeira de eucalipto no estado de São Paulo. Piracicaba, 1975. 122p. Dissertação (M.S.) – Escola Superior de Agricultura “Luiz de Queiroz”. CAIXETA-FILHO, J.V. Pesquisa Operacional: técnicas de otimização aplicadas a sistemas agroindustriais. 2.ed. São Paulo: Atlas, 2004. 169 p. ] CORREA JUNIOR, G. MPrincipais determinantes do preço do frete rodoviário para transporte de soja em grãos em diferentes regiões brasileiras: uma análise econométrica. Piracicaba, 2001. 102p. Dissertação (M.S.) – Escola Superior de Agricultura “Luiz de Queiroz”. CUNHA, V. Gerenciamento da coleta de resíduos sólidos urbanos: Estruturação e aplicação de modelo não-linear de programação por metas. Piracicaba, 2001. 223 p. Dissertação (Mestrado) – Escola Superior de Agricultura “Luiz de Queiroz”, Universidade de São Paulo. GASS, S.I. Linear Programming. 5.ed. Singapore: McGraw-Hill, 1994. 532 p. MARTINS, R.S. Racionalização da infra-estrutura de transporte no estado do Paraná: o desenvolvimento e a contribuição das ferrovias para a movimentação de grãos e farelo de soja. Piracicaba, 1998. 216p. Tese (Doutorado) – Escola Superior de Agricultura “Luiz de Queiroz”. Sites relacionados: Brasil já tem mais rodovias pedagiadas que qualquer país do mundo (http://www.estradas.com.br/materia_pedagios.htm) Municípios criam pedágios nas estradas secundárias (http://www.estradas.com.br/materia_pedagios.htm) A oposição ao projeto afirma que o pedágio vai gerar fugas de caminhoneiros. (http://www.novadutra.com.br/pergunta3.html) Diversas notícias encontradas na home-page: http://www.carrocampinas.com.br/materias/materia.asp?Id=146 Fuga do pedágio destrói rodovias alternativas. (http://www.milenio.com.br/milenio/noticias/ntc.asp?Cod=10642) O barato sai caro. (http://www.rodoviasdascolinas.com.br/legislacao_02.php) Supremo libera a pavimentação da rota alternativa (http://www.jornalfarroupilha.com.br/editorial/geral/geral_0123a.htm). No meio do caminho tinha o pedágio - Revista dos bancários edição 74, janeiro de 2001. (http://www.spbancarios.com.br/rb74/rb2.htm), 2004.
21
Autoban busca parceria para evitar fuga (http://www2.uol.com.br/tododia/ano98/julho/dia17/cidades.htm), 1998. Nova Odessa deverá ter três pedágios (http://www2.uol.com.br/tododia/ano99/maio/dia11/cidades.htm), 1999. Rota de Fuga dos Pedágios - Ribeirão Preto. Informe SETCERGS. Número 478 , 15 de Julho de 2002. Http://www.setcergs.com.br/informe/inf478.htm. Transportadores avaliam a concessão de rodovias http://www.ntc40anos.org.br/scripts/materiacompleta.asp?Cod=52&op=1 Http://www.revistaocarreteiro.com.br/ano2001/Edicao321/pedagio.htm. A cobrança de pedágio nas rodovias sob administração de concessionárias, encarada pelos transportadores de cargas como um problema, devido ao alto custo que gera ao setor, está sendo contestada por um procurador da República no Estado do Rio Grande do Sul. Revista O Carreteiro Ano XXX - Nº 321 - Maio 2001. http://www.revistaocarreteiro.com.br/ano2004/Edicao362/infraestrutura.htm. INFRA-ESTRUTURA: O Custo Transporte. Revista O Carreteiro. Ano XXXII, nº 362. Fuga de pedágio causa transtornos. Http://www.uniara.com.br/ageuniara/artigos.asp?Artigo=1076. Http://www.cosmo.com.br/forum/topico.asp?M=3510&F=100&T=2421- 15/7/2003. Estrada asfaltada a 2 semanas das eleições vira rota de fuga de pedágio http://www.brasilcaminhoes.com.br/detalhes_noticia.asp?Codigo=771. 31/10/2004
22