ORION Project-team Monique THONNAT INRIA Sophia Antipolis Creation: July 1995 Multidisciplinary...
27
ORION Project-team Monique THONNAT INRIA Sophia Antipolis Creation: July 1995 Multidisciplinary team: artificial intelligence, software engineering, computer vision
-
date post
20-Dec-2015 -
Category
Documents
-
view
214 -
download
1
Transcript of ORION Project-team Monique THONNAT INRIA Sophia Antipolis Creation: July 1995 Multidisciplinary...
ORION Project-teamMonique THONNAT
INRIA Sophia Antipolis
Creation: July 1995
Multidisciplinary team: artificial intelligence, software engineering, computer
vision
Evaluation May 2006
Orion 2
Team Presentation Research Directions Cognitive Vision 2002-2006 Reusable Systems 2002-2006 Objectives for the next Period
Contents

Evaluation May 2006
Orion 3
4 Research Scientists: François Bremond (CR1 Inria)
Sabine Moisan (CR1 Inria, HDR)
Annie Ressouche (CR1 Inria)
(team leader) Monique Thonnat (DR1 Inria)
1 External Collaborator: Jean-Paul Rigault (Prof. UNSA Inria secondment)
4 Temporary Engineers: Etienne Corvee, Ruihua Ma, Valery Valentin, Thinh Van Vu
7 PhD Students: Bui Binh, Bernard Boulay, Naoufel Kayati,
Le Thi Lan, Mohamed Becha Kaaniche,
Vincent Martin, Marcos Zuniga
Team presentation (May 2006)
Evaluation May 2006
Orion 4
Objective: Intelligent Reusable Systems for Cognitive
Vision
Cognitive Vision: Interpretation of static images Video understanding
Reusable Systems: Program Supervision LAMA Software platform
Research directions
Evaluation May 2006
Orion 5
Cognitive Vision: Image interpretation (ECVision European network on cognitive
vision, EUCognition) vs. computer vision (INRIA CogB)
Video understanding (USC Los Angeles, Georgia Tech. Atlanta, Univ. Central Florida, NUCK Taiwan, Univ. Kingston UK, INRIA Prima)
Reusable Systems: Program supervision: e.g., scheduling (ASPEN and CASPER at
JPL), image processing (Hermès at Univ. Caen, ExTI at IRIT)…
Platform approach: e.g., ontology management (Protegé at Stanford), frameworks for multi agents (Aglets, Jade, Oasis at LIP6), distributed object community (Oasis at INRIA Sophia)…
Orion team positioning
Evaluation May 2006
Orion 6
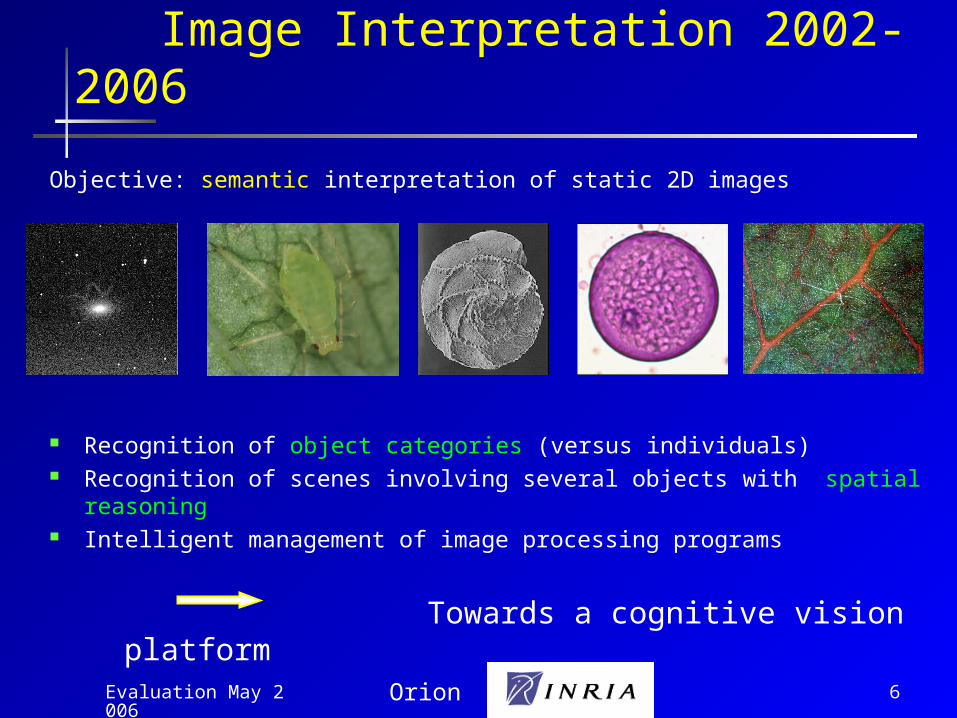
Objective: semantic interpretation of static 2D images
Recognition of object categories (versus individuals) Recognition of scenes involving several objects with spatial reasoning Intelligent management of image processing programs
Towards a cognitive vision platform
Cognitive Vision : Image Interpretation 2002-2006
Evaluation May 2006
Orion 7
Scientific achievements:
Knowledge acquisition: A visual concept ontology with 144 spatial, color and
texture concepts [MVA04]
Learning: Visual concept detectors [IVC06]
Image segmentation parameters [ICVSa06]
Cognitive vision platform Architecture [ICVS03]
Object class recognition algorithm [CIVR05]
Cognitive Vision : Image Interpretation 2002-2006
Evaluation May 2006
Orion 8
Self Assessment:
Strong points: Visual concept ontology as user-friendly intermediate layer
between image processing and application domain
Automatic building of the visual concept detectors
Still open issues: Learning for image segmentation
Temporal visual concept ontology
Cognitive Vision: Image Interpretation 2002-2006
Evaluation May 2006
Orion 9
Objective: Real time recognition of interesting behaviors
How? Data captured by video surveillance cameras
Original video understanding approach mixing: computer vision: 4D analysis (3D + temporal analysis)
artificial intelligence: a priori knowledge (scenario, environment)
software engineering: reusable VSIP platform
Cognitive Vision: Video Understanding 2002-2006
Evaluation May 2006
Orion 10
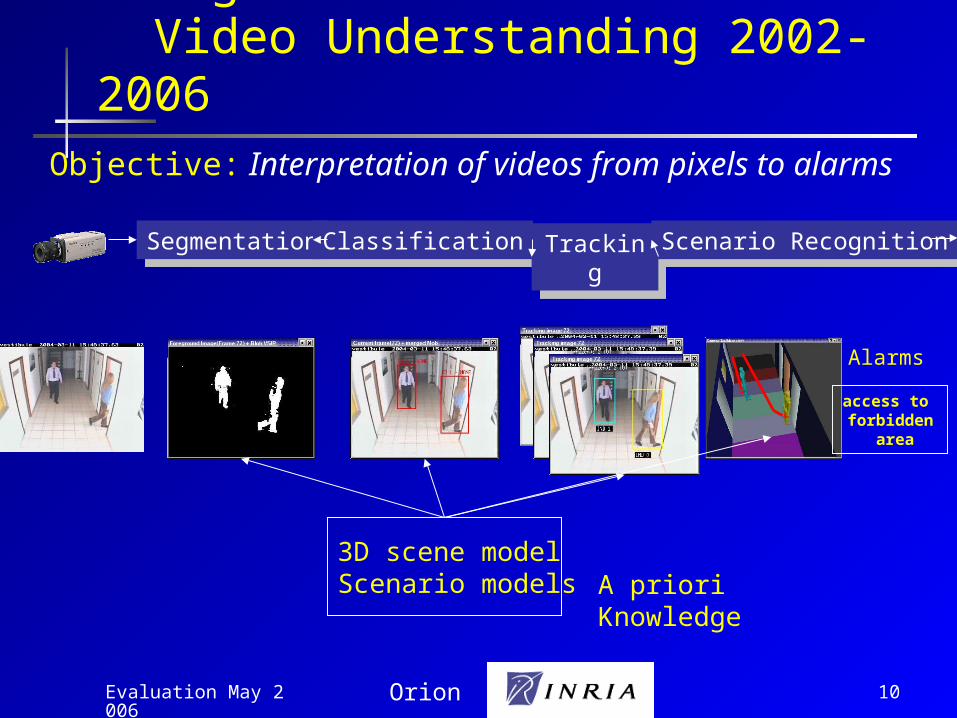
Cognitive Vision: Video Understanding 2002-2006
SegmentationSegmentation ClassificationClassification TrackingTracking Scenario RecognitionScenario Recognition
Alarms
access to forbidden
area
3D scene modelScenario models A priori Knowledge
Objective: Interpretation of videos from pixels to alarms

Evaluation May 2006
Orion 11
Scientific achievements:
Multi-sensor video understanding: 2 to 4 video cameras overlapping or not [IDSS03,JASP05]
Video cameras + optical cells + contact sensors [AVSS05]…
Learning: parameter tuning[MVAa06]
frequent temporal scenarios models [ICVSb06]
Temporal scenario: a new real time recognition algorithm [IJCAI03,ICVS03]
a new representation language [MVAb06,ECAI02,KES02]
Cognitive Vision: Video Understanding 2002-2006
Evaluation May 2006
Orion 12
Industrial impact:
Strong impact in visual surveillance (metro station, bank
agency, building access control, onboard train, airport) 4 European projects (ADVISOR, AVITRACK, SERKET, CARETAKER)
5 industrial contracts with RATP, ALSTOM, SNCF, Credit Agricole,
STMicroelectronics
2 transfer activities with BULL (Paris), VIGITEC (Brussels)
Creation of a start-up Keeneo July 2005 (8 persons) for
industrialization and exploitation of VSIP library.
Cognitive Vision: Video Understanding 2002-2006
Evaluation May 2006
Orion 13
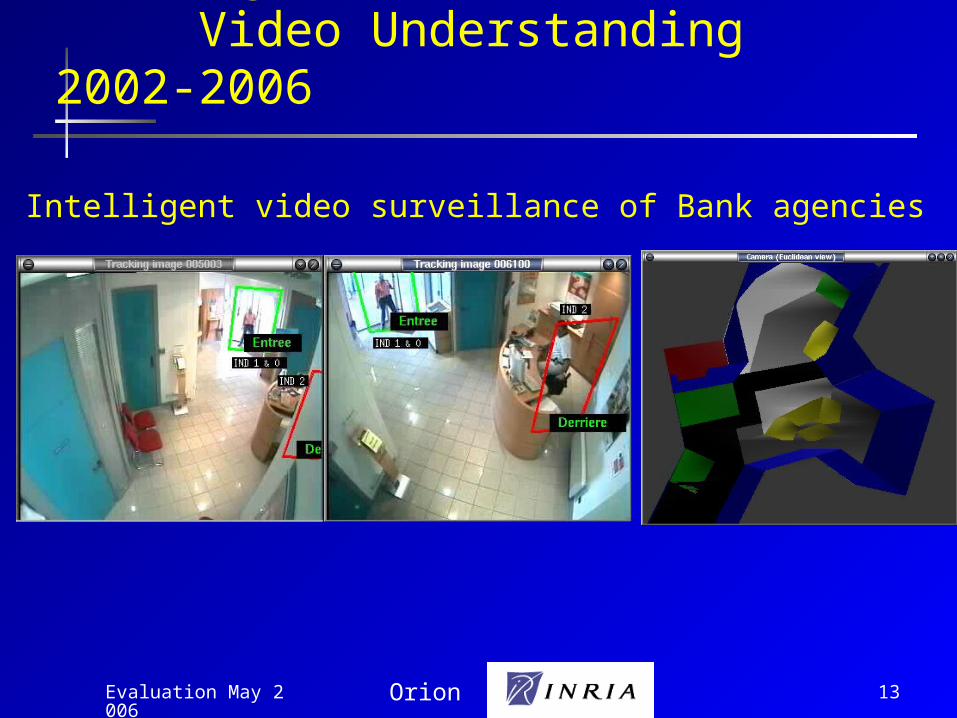
Cognitive Vision: Video Understanding 2002-2006
Intelligent video surveillance of Bank agencies

Toulouse - 3rd June 2004
Orion14
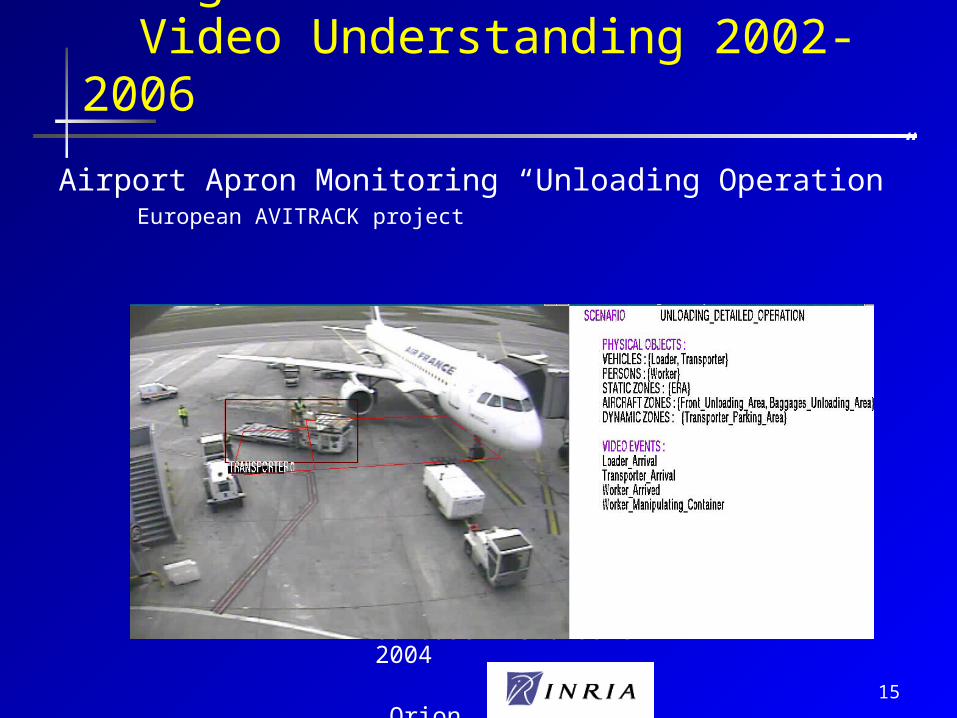
“Unloading Global Operation”
Cognitive Vision: Video Understanding 2002-2006
Toulouse - 3rd June 2004
Orion15
Airport Apron Monitoring “Unloading Operation” European AVITRACK project
Cognitive Vision: Video Understanding 2002-2006

Evaluation May 2006
Orion 16
Self Assessment:
Strong points: Video understanding approach: real time, effective
techniques used by external academic and industrial teams
Launch of an evaluation competition for video surveillance
algorithms (ETISEO) with currently 25 international teams
Still open issues: Learning
Multi sensor
Cognitive Vision:Video Understanding 2002-2006
Evaluation May 2006
Orion 17
Reusable Systems: original approach for the reuse
of programs with program supervision techniques
Program supervision: Automate the (re)configuration and execution of programs selection, scheduling, execution, and control of results
Knowledge-based approach: knowledge modeling, planning techniques, …..
Reusable Systems: Program Supervision
Evaluation May 2006
Orion 18
Reusable Systems: LAMA Platform
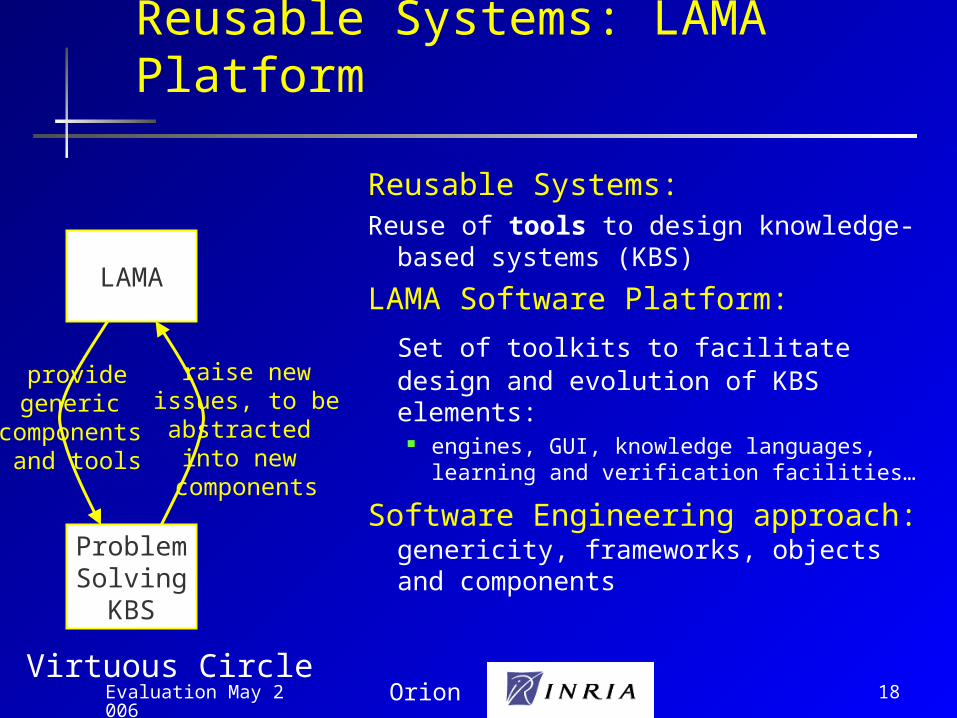
Reusable Systems: Reuse of tools to design knowledge-
based systems (KBS)
LAMA Software Platform:
Set of toolkits to facilitate design and evolution of KBS elements:
engines, GUI, knowledge languages, learning and verification facilities…
Software Engineering approach: genericity, frameworks, objects and components
LAMA
ProblemSolving
KBS
providegeneric
components and tools
raise newissues, to beabstracted into new
components
Virtuous Circle
Evaluation May 2006
Orion 19
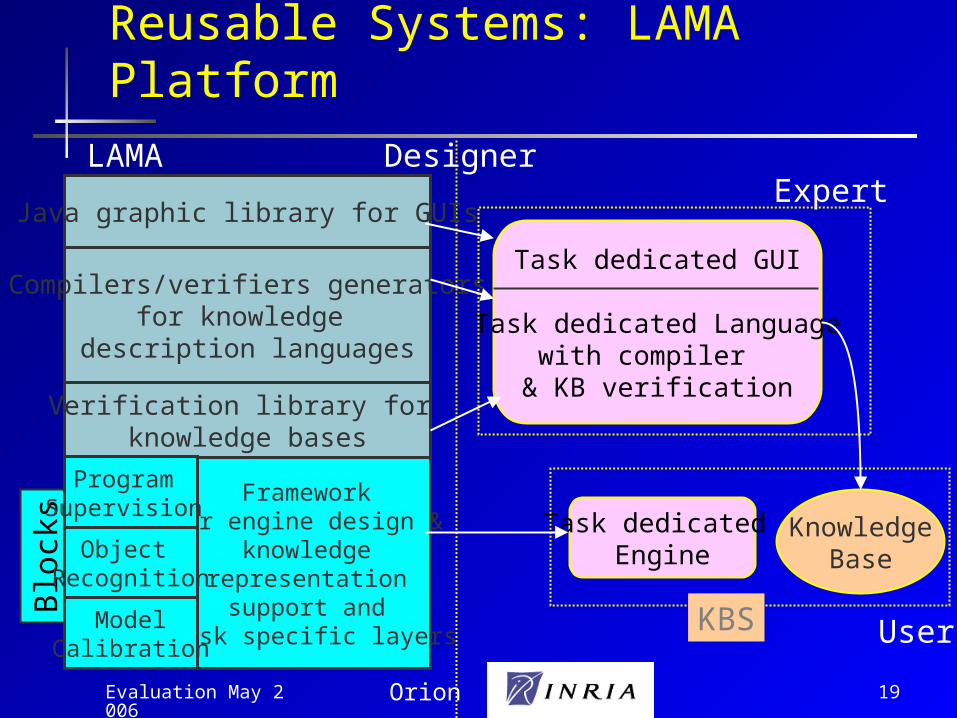
Reusable Systems: LAMA Platform
Task dedicated Engine
KnowledgeBase
KBS User
Expert
Task dedicated GUI
Task dedicated Languagewith compiler
& KB verification
Blo
cks
Java graphic library for GUIs
Verification library for knowledge bases
Compilers/verifiers generatorsfor knowledge
description languages
Framework for engine design &
knowledge representation
support and task specific layers
LAMA Designer
Program Supervision
Object Recognition
ModelCalibration
Evaluation May 2006
Orion 20
Reusable Systems: Program Supervision 2002-2006
Scientific achievements: Improvement of the Pegase engine (Pegase+)
Multithreading, extensions to the YAKL language [ECAI02] Distributed program supervision
Supervision Web server, multi-agent techniques, interoperability Pegase/Java/agents [TC06]
Cooperation with image and video understanding Object recognition task using program supervision
[ICTAI03] Interoperability with VSIP: program supervision for video
understanding [ICVSc06]
Evaluation May 2006
Orion 21
Reusable Systems: LAMA Platform 2002-2006
Scientific achievements: Enforcing LAMA safe usage
Verification of LAMA component extensions relying on Model Checking approach [Informatica01, SEFM04]
Encompassing new tasks Classification and object recognition in images: new
engine and new knowledge representation language [ICTAI03]
Model calibration in hydraulics: new engine/language (PhD co-directed with INPT and CEMAGREF) [KES03, JH05]
Evaluation May 2006
Orion 22
Reusable Systems: Self Assessment
Strong points: Real time performance (Pegase+ and video)
Using program supervision costs less than 5% of overall processing time
LAMA genericity at work Different tasks (supervision, classification, calibration) in
various application domains (hydraulics, biology, astronomy, video surveillance…)
Shorter development time and safer code Reuse of concepts as well as code
Several variants of a task sharing common concepts Extensibility and commitment to Standards
Evaluation May 2006
Orion 23
Creation of a new INRIA project-team PULSAR
Perception Understanding and Learning Systems for Activity
Recognition
Theme:
CogC Multimedia data: interpretation and man-machine interaction
Multidisciplinary team: artificial intelligence, software engineering, computer vision
Objective: Research on Cognitive Systems for Activity Recognition
Focus on spatiotemporal activities of physical objects
From sensor output to high level interpretation
Objectives for the next period 1/5

Evaluation May 2006
Orion 24
PULSAR Scientific objectives:
Two research axes: Scene Understanding for Activity Recognition
Generic Components for Activity Recognition
PULSAR Applications: Safety/security (e.g. intelligent surveillance)
Healthcare (e.g. assistance to the elderly)
Objectives for the next period 2/5
Evaluation May 2006
Orion 25
PULSAR: Scene Understanding for Activity
Recognition Perception: multi-sensors, finer descriptors
Understanding: uncertainty, 4D coherency,
ontology for AR
Learning: parameter setting, event detector,
activity models, program supervision KB (risky
objective)
Objectives for the next period 3/5
Evaluation May 2006
Orion 26
PULSAR Generic Components for Activity
RecognitionFrom LAMA Platform to AR platform: Model extensions:
modeling time and scenarios handling uncertainty
User-friendliness and safeness of use: theory and tools for component frameworks scalability of verification methods
Architecture improvement: parallelization, distribution, concurrence real time response domain specific software and graphical interface plugging
Objectives for the next period 4/5
Evaluation May 2006
Orion 27
Short term objectives:
Scene Understanding for Activity Recognition Perception: gesture analysis Understanding:
ontology-based activity recognition uncertainty management
Learning: primitive event detectors learning
Generic Components for Activity Recognition Model of time and scenarios Internal concurrency and distributed architecture
Objectives for the next period 5/5