Position Limits: Calculations, Overlapping Jurisdiction, EU Developments and More

STAR Global Conference, Vienna, March 17-19, 2014Madhusudhan Devanathan
Optimization of overlapping mesh calculations for simulation of paint shop
manufacturing processes

06.03.2014
Agenda
1. Simulation of Rodip© pretreatment/coating process
2. Simulation of adhesive smearing onhang-on parts
3. Simulation of automotive top coatspray booth
4. Conclusion
Source : Autoline.tv
Source Daimler AG
Source Daimler AG
© 2014 Duerr AG
Source Daimler AG
2MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan

06.03.2014
Dipping of Body-In-White (BIW) in liquid tankRodip used in pretreatment / coating systems
Simulation Objective : Locate residual air pockets / liquid pondsPressure forces on hang-on partsOptimum computation time
Process time around 62s
BIW Meshing : Automated workflow in STAR-CCM+Presented in Star Global Conference 2012
Numerical model :Volume of fluid (VOF) to model air and liquid phaseHydrostatic boundary conditionsOverlapping grids and superposing motion model
Translational velocity in X and Z, rotation about YTime dependant volume sources
Case 1: Rodip© simulation
© 2014 Duerr AG
Source: Parker Engineering Co.,Ltd.
Rodip © motion in simulation3MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan

06.03.2014
Local refinement of background meshVOF model : Refined air-liquid interface Overset Grid : Refined motion space
Precalculation to create time dependant volume sour cesMovement of overset boundary along path with RBMExport of overset boundary at certain frequencyWrapping exported surfaces within remesh time interval
Generation of background mesh with respective volu me sources
0 10 20 30 40 50
Simulation time
Case 1: Creation of time dependant volume sources
4
Mesh section
MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan

06.03.2014
Case 1 : Analysing dip-in simulation results
Smooth flooding during dipping in180 deg rotation ensures movement of air bubblesAir pockets detected in rear floor regionOptimization of BIW construction
1
2
1 2
Location of trapped air
VOF field along midsection of carSource: Daimler AG
5MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan
Air
Liquid
06.03.2014
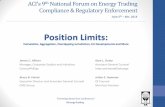
Case 2 : Adhesive smearing during dip-in process
Smeared adhesive seen after dip-in process
Background of smearing phenomenaAdhesive is not cured before dippingNon-uniform filling of cavities of engine hoodUnbalanced pressure forces act on componentsRelative motion between components smear adhesive between them
Filling behavior during dip-in process
Source: Daimler AG
F
Air
Liquid
Source : Daimler AG
Source: Daimler AG6
MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan

06.03.2014
Mapping of forces from CFD to Structural MeshCells vertices of midplane
Additional conditions for mapping
Calculation of deformation in Abaqus
Case 2 : Calculating deformations from dipping forc es
FEmg F K U→ →
+ =
Map1F
2F1 2, FF
1 2FEF F F→ → →
= +
1 2
n N
FEF F F→ → → + =
∑ ∑
CFD mesh FE mesh
Visualizing and during dipping processFEF→
U→
* Deformation are scaled from original values
*
Source: Daimler AG
n: Number of CFD cells , N : Number of FE elements
K: Stiffness matrix, U : Deformation matrix
7MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan

06.03.2014
P1
P2
P3
P4
P5
P6
P7
P8
P9
P1
P2
P3
P4
P5
P6
P7
P8
P9
Case 2: Optimizing design to maintain open contact
Initial design
Optimized design
Con
tact
ope
n in
[mm
]C
onta
ct o
pen
in [m
m]
Air
Liquid
4mm
Air
Liquid
8
- Additional Holes
MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan

06.03.2014
Case 3 : Simulation of Automotive top coat spray bo oth
22 25 3740
5 2 4 15 1 13
1 2 3
12 11 13 44116 2 46610 77
20 24173921 23
1215 11
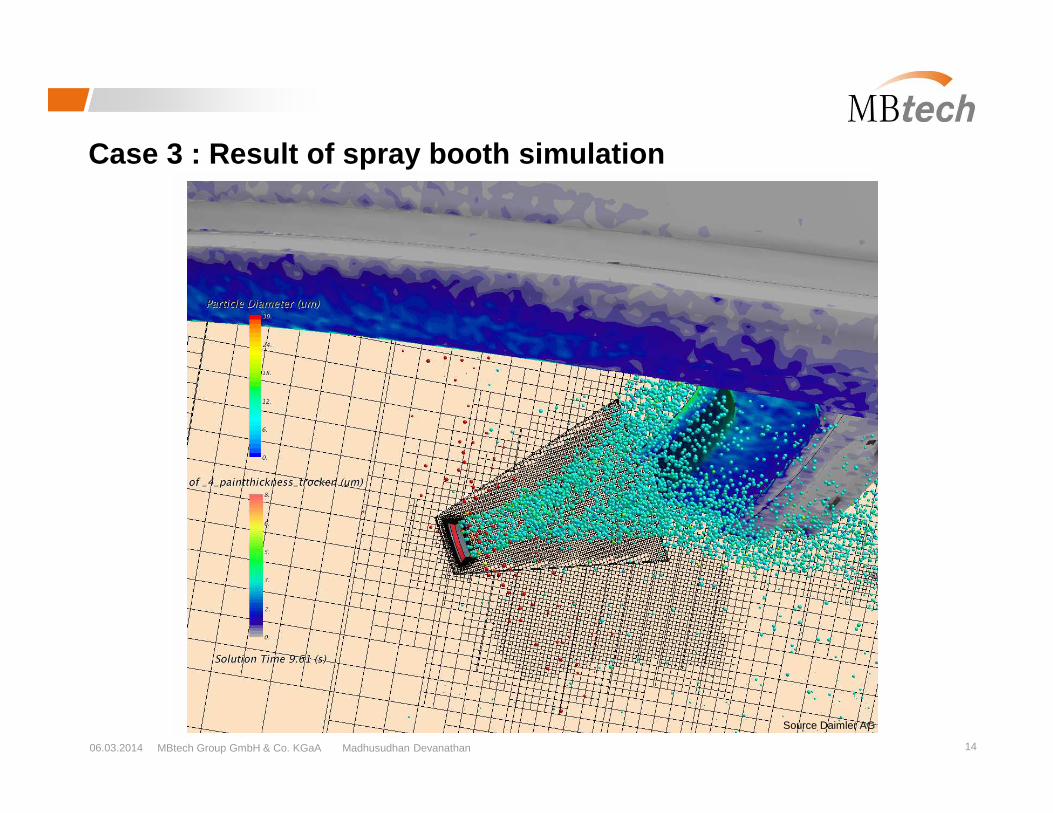
Simulation objective :Determination of paint thickness on BIWEvaluation of robot programsOptimization of brush settingsPrediction of overspray
Process data requiredPosition of robots and their motion programsTimeline of robots Nozzle gun ON/OFF program Brush change program and settings
Spray booth layout and program timeline
Source Daimler AG
9MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan
06.03.2014
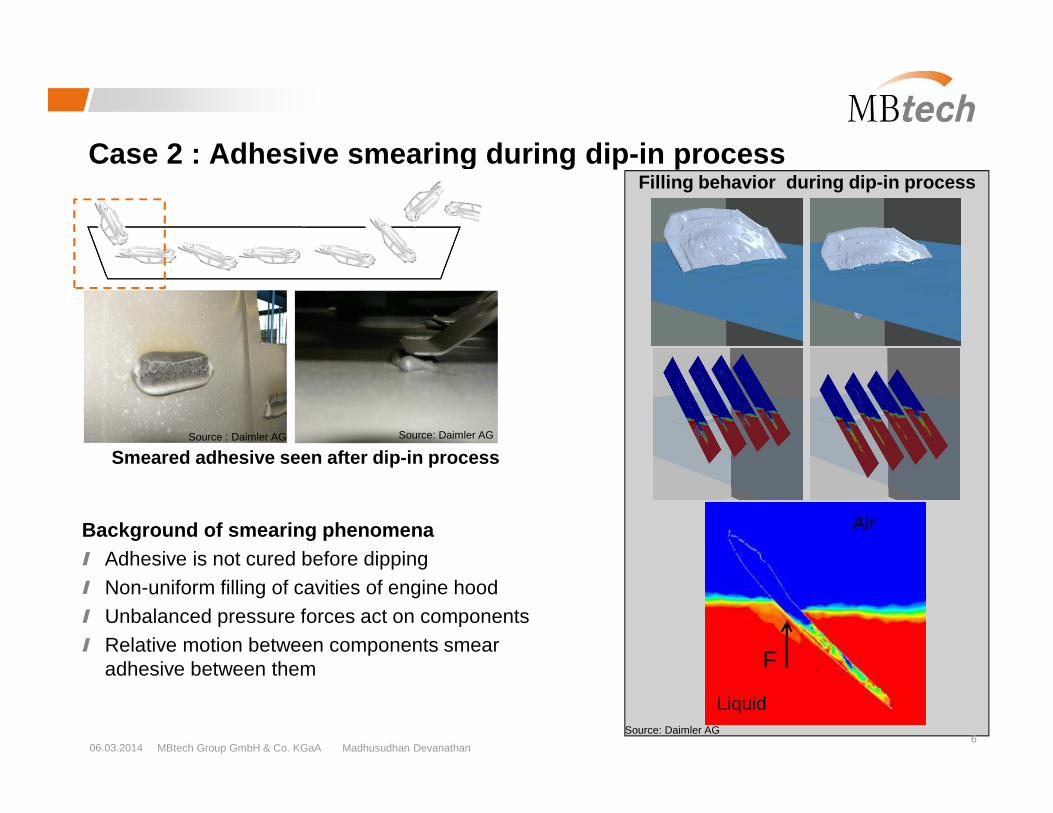
Case3 : Physics of paint nozzle
Source : Eisenmannair inlet rotating bell paint inlet
Nozzle / Brush ParametersInlet air flow rate N1,N2 (L/min)Rotation rate (RPM)Paint volume flowrate PFR (ml/min)
Numerical modelCompressible airPrimary atomisation – Lagrangian particlesSecondary breakup modelParticle under influence of
Drag and pressure forcesGravitational forcesTwo way coupling
Primary atomisation
Source Daimler AG
Source Daimler AG
10MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan

06.03.2014
Case 3 : Calibration of paint nozzle
Velocity (m/s)
Velocity (m/s)
150
0
75
75
0
37.5
3.69
0
1.05
Paint film (µm)
Simulation Vs ExperimentBrush A
N1=400, N2=200, RPM = 25000, PFR= 180
Brush B N1=400, N2=600, RPM =
25000 , PFR=240Brush A
Brush B
2.63
11Painting direction
A
Measuring line
Section A
MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan

06.03.2014
Robot motion : Describe movement of tool center point (TCP)Robot path : Description of over timeSTAR-CCM+ requires
First derivative of position :Starting position :
Setting robotic motion models and coordinate systemsRotation sequence :
Case 3 : Modeling robotic motion using overset grid s
[ ], , , , ,X Y Z α β γ
, , , , ,X Y Z α β γ• • • • • •
[ ]0 0 0 0 0 0, , , , ,X Y Z α β γ
( ) ( ) ( )x y zR R Rα β γ
1 2 3(XYZ) ( ) ( ) ( )X Y Z X Y Z X Y Zα β γ′ ′ ′ ′′ ′′ ′′ ′′′ ′′′ ′′′→ → →ɺ ɺ ɺ Overset mesh for nozzle
Swept volume of overset boundary
12
34
(4)
(0,1,2,3)
Source Daimler AG
12
200mm
MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan

06.03.2014
Case 3 : Programming nozzle ON/OFF and brush change s
Nozzle flow ON/OFF :Multiply flow inlet conditions by heavy side unit step function
Brush changes :One or all brush parameters changeJava script monitors all robots after everytime iterationOn brush change detection, trigger brush event
Brush change event:Change inlet velocity tableChange particle distribution tableChange wall rotation
Change particle flow rateImplementing dynamic brush change program
Source: Daimler AG
13MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan
06.03.2014
Case 3 : Result of spray booth simulation
Source Daimler AG
14MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan

06.03.2014
Conclusion
Complex multi-DOF motion in painting systems can be simulated using overset grid methods
Reduction of computational time was achieved by developing overset grids with time-dependant volume sources
Java based macros used to implement complex time dependant boundary conditions in STAR-CCM+
Automotive top coat simulation methodolgy developed to simulate the complex physical processes in an automotive top coat spray booth
15MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan
06.03.2014
Acknowledgement
Mr.Lothar HaigisHead of structural analysis and computational fluid dynamicsMBtech Group GmbH & Co. KGaA, Germany
Mr.Jochen RathfelderInnovative Technische Berechnungen GmbH ,Germany
16MBtech Group GmbH & Co. KGaA Madhusudhan Devanathan