

Optimising Loader Performance - Mineware
19
-
Upload
mellwoodmineware -
Category
Technology
-
view
473 -
download
2
Transcript of Optimising Loader Performance - Mineware

Outcomes through Innovation
1. MineWare – an introduction
2. Some new technologies:
1. Loader based payload
2. Machine terrain mapping
3. Questions

MineWare
Office
Installations
MineWare provides monitoring system for:Electric rope shovelsHydraulic excavators (face shovels / back-hoes)Draglines

AIMS:
� Provide operators with real-
time in-truck payload
feedback to better control
loading process
� Provide system to monitor
truck on-board weighing
systems
� Work on electric and
hydraulic machines
� Stay within CAT 10/10/20
rule
Technology 1: Loader Payload Management

Optimum Truck
Payload
Reduce Opportunity
Cost, avoid at-face dumping
due to overloads
Maximise Circuit
Productivity
Reduce Truck bunching/ queuing
Reduce Truck and Road
Maintenance Cost
(10/10/20)
Potential to reduce # of
trucks
Reduced spillage from
overloads
Argus Loader Based Payload Benefits
Increase average truck
payload, decrease variability
= more production +
less overloads

Why Loader Based Payload?
Truck systems not as accurate while loading
Truck payloads at point of load Vs second gear reweigh
• Its real-time!
• Continued calibration of trucks is
difficult
• Some trucks have no weighing
system
• Most accurate truck weighing
occurs on ‘second gear reweigh’

Calculating Payload
Test Point
Test Point
Strain Gauge
Rope Shovel Hydraulic Shovel
Strain Gauge
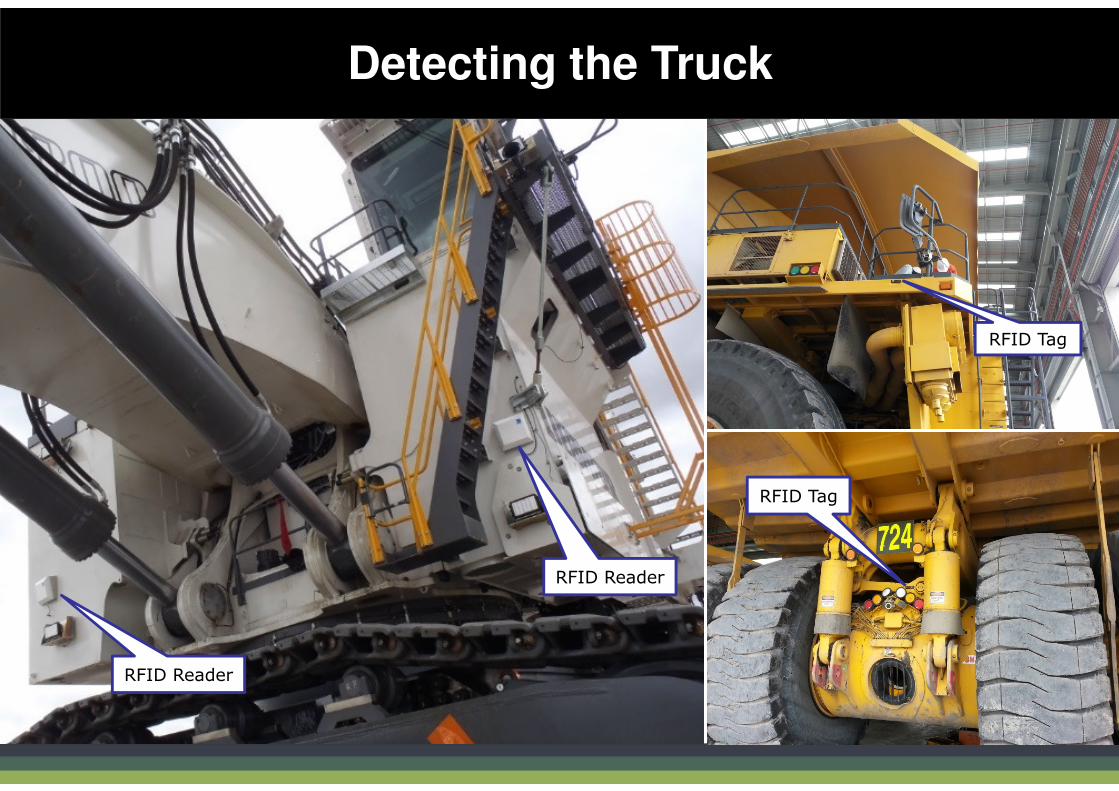
Detecting the Truck
RFID Tag
RFID Tag
RFID Reader
RFID Reader

Argus Shovel Monitor
The approach: technology and simple feedback:
New Truck Arrives
RFID system
determines Truck ID
Capacity of truck
provided to operator
Argus payload system
calculates load for
each pass
Operator provided real-time
‘remaining tonnes’ to full load
Truck loaded
correctly and
dispatched
Visual Feedback
during loading
to operator
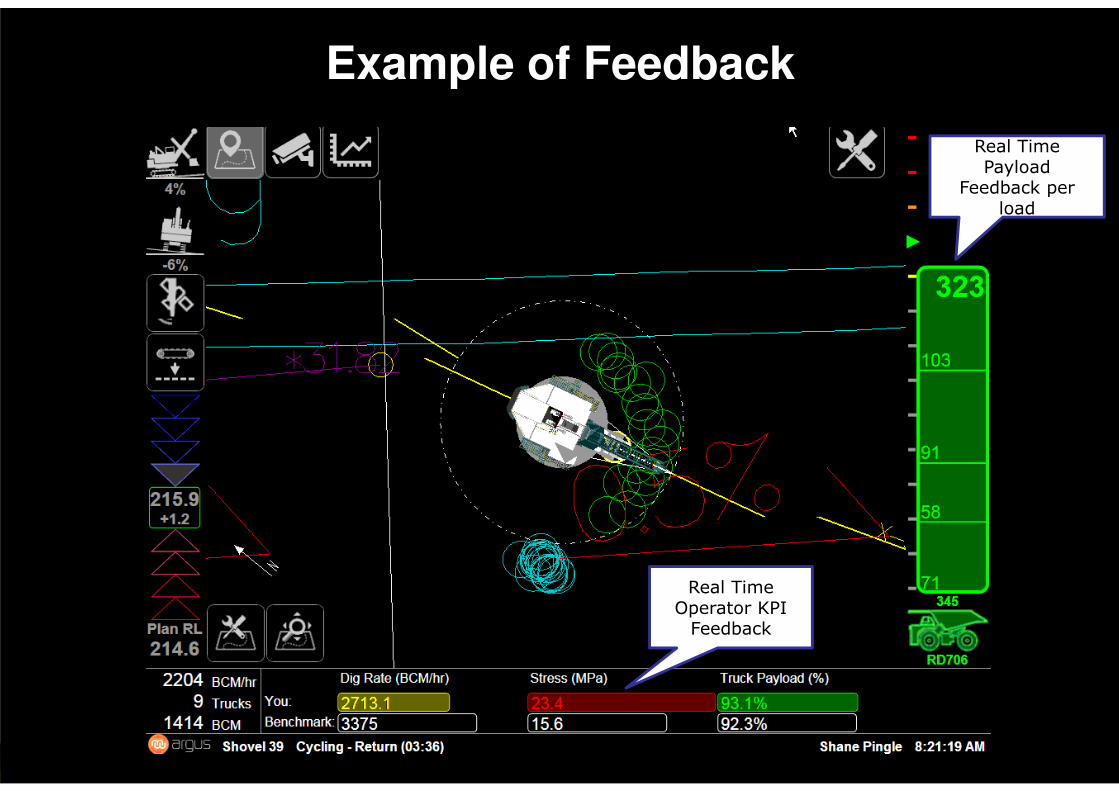
Example of Feedback
Real Time Payload
Feedback per load
Real Time Operator KPI
Feedback
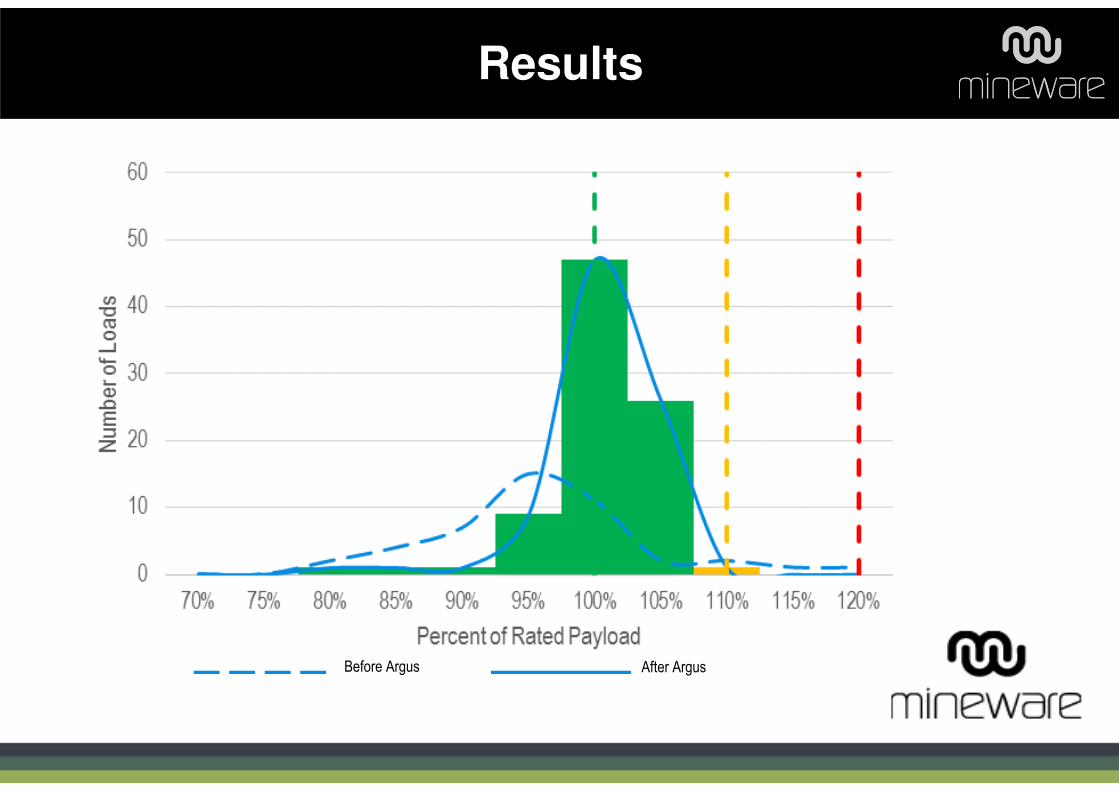
Results
Before Argus After Argus
AIM:
� Provide a simple, effective,
low-cost system for real-
time monitoring of plan
compliance for loaders
Technology 2: Machine Terrain Mapping
BENEFITS:
� Real-time feedback to operators on
compliance to excavation design =
better execution
� Ability to engineers to easily monitor
excavation progress and forecast
� Basic calculations of volumes
� Visually represent data such as
production rates, operator techniques
� All done with existing sensors /
processors
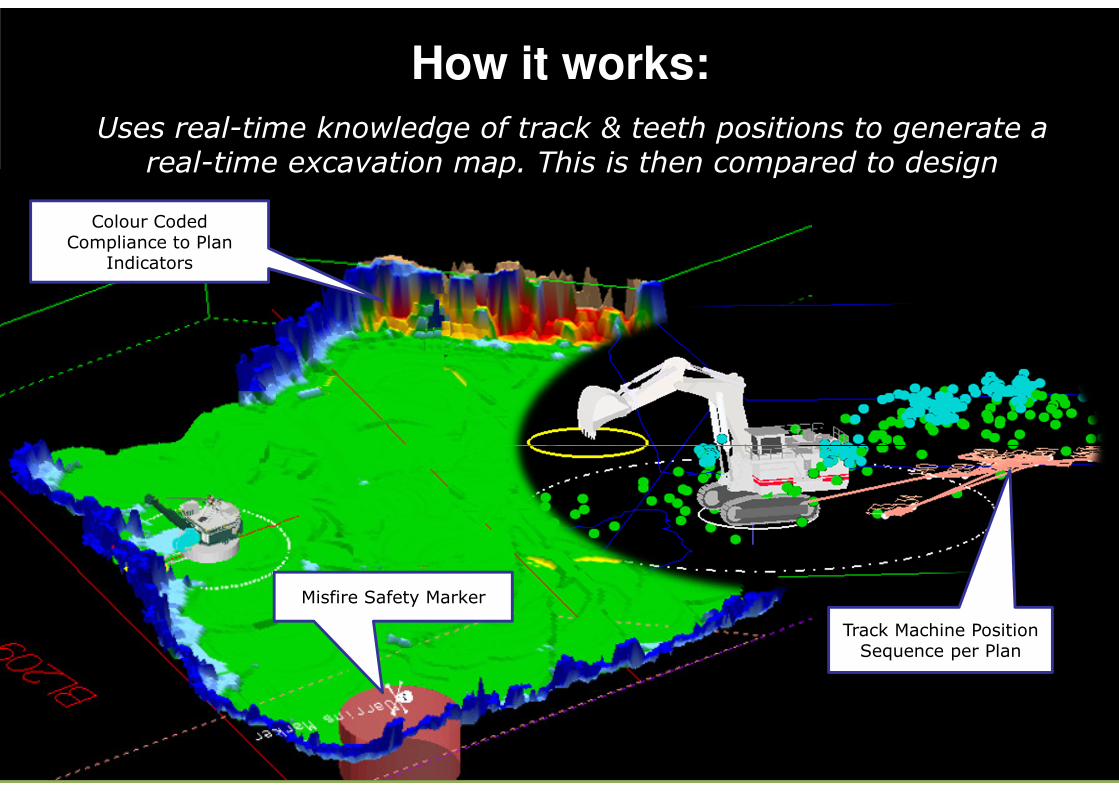
How it works:
Uses real-time knowledge of track & teeth positions to generate a real-time excavation map. This is then compared to design
Misfire Safety Marker
Colour Coded Compliance to Plan
Indicators
Track Machine Position Sequence per Plan
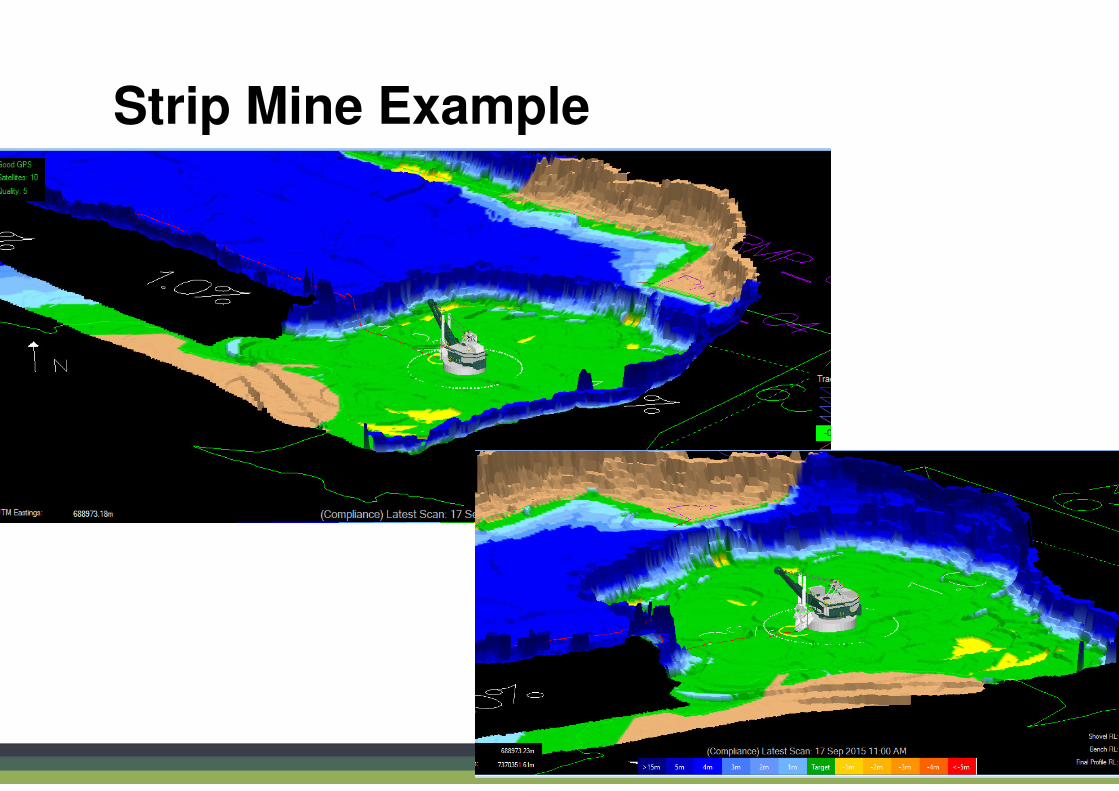
Strip Mine Example

Operator Screen

Example detection of non-compliance to plan
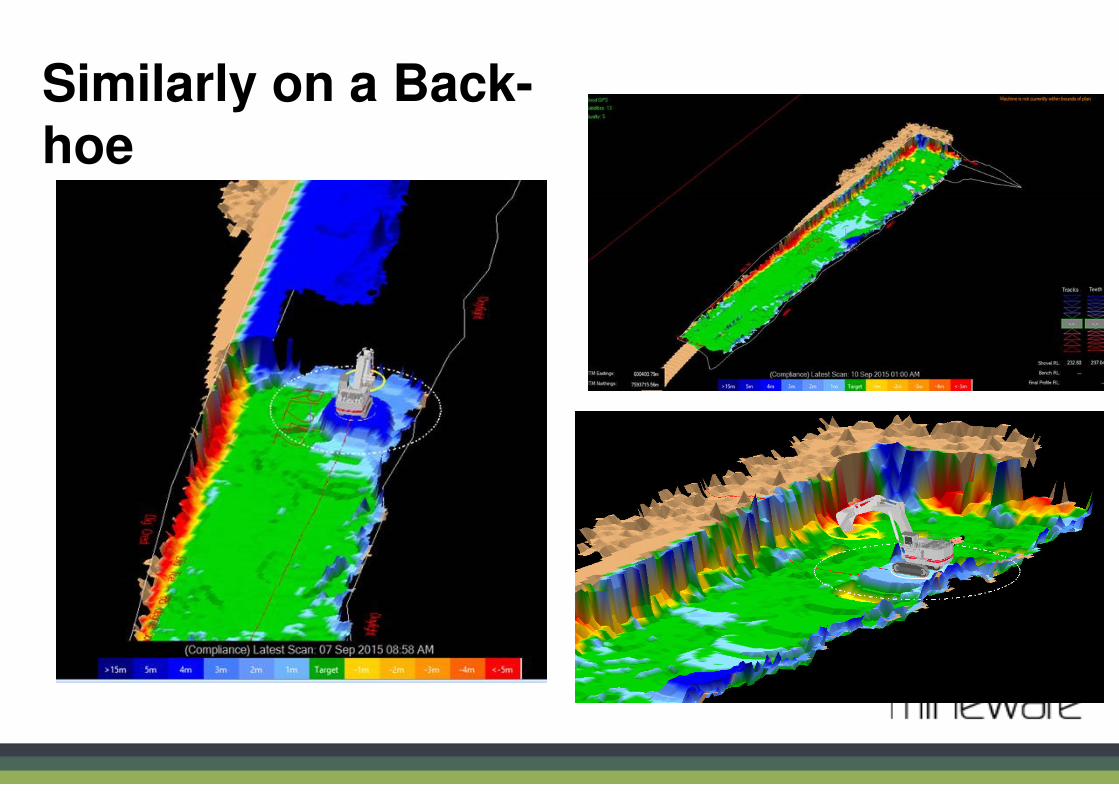
Similarly on a Back-hoe


� Better data replay abilities
� Capability to calculate time to end of strip/design based on
historical rates
� Sharing maps in real-time between machines (inc. dozers
and other mobile equipment)
� Augment maps where other data sources available – i.e.
lydar, drones, scanners, etc. Export to planning packages
� Look at estimating face shape (stability), stand-off distance
guidance, and incorporating excavation ‘technique’
guidance.
Technology 2: Future Work


















