OPTICAL COHERENCE TOMOGRAPHY OF HUMAN …
189
OPTICAL COHERENCE TOMOGRAPHY OF HUMAN TRANSPLANT KIDNEYS A Dissertation submitted to the Faculty of the Graduate School of Arts and Sciences of Georgetown University in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Biochemistry and Molecular Biology By Brandon Bright Konkel, M.S. Washington, DC July 6, 2018
Transcript of OPTICAL COHERENCE TOMOGRAPHY OF HUMAN …

OPTICAL COHERENCE TOMOGRAPHY OF HUMAN TRANSPLANT KIDNEYS
A Dissertation
submitted to the Faculty of the
Graduate School of Arts and Sciences
of Georgetown University
in partial fulfillment of the requirements for the
degree of
Doctor of Philosophy
in Biochemistry and Molecular Biology
By
Brandon Bright Konkel, M.S.
Washington, DC
July 6, 2018

ii
Copyright 2019 by Brandon Konkel
All Rights Reserved

iii
OPTICAL COHERENCE TOMOGRAPHY OF HUMAN TRANSPLANT KIDNEYS
Brandon Bright Konkel, M.S.
Thesis Advisor: Moshe Levi, Ph.D.
ABSTRACT
Current measures for assessing the viability of donor kidneys offered for transplant are lacking.
Optical Coherence Tomography (OCT) can image subsurface tissue morphology to supplement
current measures and potentially improve prediction of post-transplant function. OCT imaging
was performed on donor kidneys before and immediately after implantation during 169 human
kidney transplant surgeries. A fully automated image analysis pipeline was developed and
validated against trained manual raters to measure structural parameters of the kidney’s proximal
convoluted tubules (PCTs) visualized in the OCT images. The association of these structural
parameters with post-transplant function was investigated. This study included kidneys from live
and deceased donors. 88 deceased donor kidneys in this study were stored by static cold storage
(SCS) and an additional 15 were preserved by hypothermic machine perfusion (HMP). A subset
of both SCS and HMP deceased donor kidneys were classified as expanded criteria donor (ECD)
kidneys, with elevated risk of poor post-transplant function. Post-transplant function was
characterized as either immediate graft function (IGF) or delayed graft function (DGF). In ECD
kidneys preserved by SCS, increased PCT lumen diameter prior to implantation was found to
predict DGF. Pre-implantation lumen diameter in the SCS-ECD group was an average of 25.5
µm in kidneys that experienced IGF, and 27.9 µm in kidneys that experienced DGF. Following
transplant and reperfusion, increased diameter continued to be predictive of DGF in SCS-ECD
kidneys. Post-reperfusion lumen diameter in the SCS-ECD group was an average of 28.1 µm in
kidneys that experienced IGF, and 32.5 µm in kidneys that experienced DGF. In standard criteria

iv
donor (SCD) kidneys preserved by SCS, there were no significant differences in measurements
between IGF and DGF recovery groups. In kidneys preserved by HMP, reduced distance
between adjacent lumen following transplant and reperfusion was found to predict DGF. Post-
reperfusion inter-lumen distance in the HMP-SCD group was an average of 45.8 µm in kidneys
that experienced IGF, and 41.4 µm in kidneys that experienced DGF. Results suggest that OCT
measurements of PCTs may be useful for predicting post-transplant function in ECD kidneys and
kidneys stored by HMP, or in guiding biopsies towards pathological sites.

v
This dissertation is dedicated to Joan and David Konkel for their support and to Stephanie Shuey
(who was told on our first date 2 and a half years ago that I was 3 months from graduating) for
her patience.
BRANDON KONKEL

vi
TABLE OF CONTENTS
INTRODUCTION .......................................................................................................................... 1
Objectives and Specific Aims ..................................................................................................... 1
Contributions of the Thesis ......................................................................................................... 3
Structure of the Thesis................................................................................................................. 4
CHAPTER 1: CLINICAL BACKGROUND ................................................................................. 5
1.1 Introduction ...................................................................................................................... 5
1.2 The Need for Improved Markers of Viability .................................................................. 5
1.3 Proximal Tubule Morphology and Unstressed Physiology.............................................. 7
1.3.1 Na/K/ATPase in Maintenance of the Proximal Convoluted Tubule Sodium
Gradient .................................................................................................................................. 9
1.3.2 Trans-cellular Reabsorption of NaCl and Water .................................................... 10
1.3.3 Aerobic Metabolism in the Proximal Convoluted Tubules Under Normal
Physiological Conditions ....................................................................................................... 11
1.4 Disease/Insult Manifestation in Proximal Convoluted Tubules ..................................... 13
1.4.1 Warm and Cold Ischemia in Cadaver Donor Transplants ...................................... 13
1.4.2 Induction of Ischemia and Subsequent Shift to Anaerobic Metabolism................. 15
1.4.3 Cellular Edema Following Na/K/ATPase Failure in the Proximal Convoluted
Tubules ................................................................................................................................ 16
1.4.4 Ischemia-Reperfusion Injury .................................................................................. 17
1.4.5 Acute Tubular Injury............................................................................................... 19
1.4.6 Interstitial Fibrosis .................................................................................................. 20
1.4.7 Tubular Atrophy...................................................................................................... 23
1.4.8 Arterial and Arteriolar Narrowing (Arteriolar Hyalinosis/Hyaline
Arteriosclerosis)..................................................................................................................... 24
1.4.9 Glomerular Sclerosis (Glomerulosclerosis) ............................................................ 25
1.5 Visualization of Pathology ............................................................................................. 28
1.5.1 Kidney Biopsies ...................................................................................................... 28
1.5.1.1 Procurement Biopsies .......................................................................................... 30
1.5.1.2 Preimplantation “Zero-Time” Biopsies ............................................................... 30
1.5.1.3 Post-Reperfusion Protocol Biopsies .................................................................... 31

vii
1.5.1.4 Remuzzi Scoring of Biopsies .............................................................................. 32
1.5.1.5 MAPI Scoring of Biopsies .................................................................................. 33
1.5.1.6 Banff Scoring of Biopsies ................................................................................... 34
1.5.2 Visible and Relevant Features in Optical Coherence Tomography Imaging of the
Human Kidney .................................................................................................................. 35
1.6 Summary ........................................................................................................................ 39
CHAPTER 2: IMAGING AND IMAGE PROCESSING ............................................................ 42
2.1 Introduction .................................................................................................................... 42
2.2 Non-Invasive Imaging Modalities Used in Kidney Transplantation ............................. 42
2.3 Optical Coherence Tomography .................................................................................... 46
2.3.1 Time-Domain Optical Coherence Tomography (TD-OCT) ................................... 50
2.3.2 Fourier-Domain Optical Coherence Tomography (FD-OCT) ................................ 51
2.4 Image Processing............................................................................................................ 53
2.4.1 Low-Pass Filter (Blurring Mask) ............................................................................ 54
2.4.1.1 Mean Filter .......................................................................................................... 55
2.4.1.2 Median Filter ....................................................................................................... 55
2.4.1.3 Gaussian Filter..................................................................................................... 56
2.4.2 High-Pass Filter (Sharpening Mask) ....................................................................... 58
2.4.2.1 Prewitt Filter ........................................................................................................ 59
2.4.2.2 Sobel Filter .......................................................................................................... 61
2.4.2.3 Laplacian Filter ................................................................................................... 63
2.4.3 Contrast Enhancement Techniques ......................................................................... 64
2.4.3.1 Contrast Stretching (Normalization) ................................................................... 65
2.4.3.2 Histogram Equalization ....................................................................................... 66
2.4.3.3 Adaptive Histogram Equalization ....................................................................... 67
2.4.4 Edge Detection ........................................................................................................ 68
2.4.4.1 First Order Derivative Edge Detection................................................................ 69
2.4.4.2 Canny Edge Detection ......................................................................................... 72
2.4.4.3 Second Order Derivative Edge Detection ........................................................... 74
2.4.5 Region Segmentation .............................................................................................. 76
2.4.5.1 Global Thresholding ............................................................................................ 76

viii
2.4.5.2 Otsu’s Method ..................................................................................................... 77
2.4.5.3 Local Thresholding ............................................................................................. 78
2.4.6 Active Contour (Snakes) ......................................................................................... 79
2.4.7 Graph Cuts .............................................................................................................. 81
2.4.8 Segmentation in Optical Coherence Tomography .................................................. 83
2.5 Summary ........................................................................................................................ 85
CHAPTER 3: IMAGE CAPTURE AND ANALYSIS PIPELINE .............................................. 87
3.1 Introduction .................................................................................................................... 87
3.2 System Specifications .................................................................................................... 87
3.2.1 930 vs. 1325nm ....................................................................................................... 87
3.2.2 2D vs. 3D (OCT-B versus OCT-C cans) ................................................................ 90
3.2.3 Field of View .......................................................................................................... 90
3.2.4 Averaging ................................................................................................................ 91
3.2.5 Scale ........................................................................................................................ 91
3.3 Operating Room Imaging Protocol ................................................................................ 92
3.3.1 Basic Setup.............................................................................................................. 92
3.3.2 Timing of Pre and Post Scans, Multiple Scans ....................................................... 96
3.4 Manual Segmentation ..................................................................................................... 97
3.5 Automatic Segmentation .............................................................................................. 100
3.5.1 Automatic Analysis Pipeline................................................................................. 100
3.5.2 Empty B-Scan Detection....................................................................................... 102
3.5.3 Reflection Detection ............................................................................................. 103
3.5.4 High Adipose Detection ........................................................................................ 104
3.5.5 Segmentation of the Renal Capsule-Kidney Cortex Interface .............................. 105
3.5.6 Segmentation of Quantifiable Kidney Cortex....................................................... 106
3.5.7 Segmentation of Proximal Convoluted Tubule Lumen (Region of Interest Map for
Automatic Selection) ........................................................................................................... 110
3.6 Comparison of Automatic and Manual Segmentation ................................................. 113
3.6.1 Measurement Extraction ....................................................................................... 115
3.6.1.1 Density Measurements ...................................................................................... 115

ix
3.6.1.2 Diameter Measurements .................................................................................... 118
3.6.1.3 Inter-Lumen Measurements .............................................................................. 119
3.6.1.4 Inter-Centroid Measurements ............................................................................ 120
3.6.2 B-Scan Selection and Measurement Compilation ................................................ 120
3.7 Summary ...................................................................................................................... 121
CHAPTER 4: CLINICAL RESULTS ........................................................................................ 124
4.1 Introduction .................................................................................................................. 124
4.2 Evaluating Donors ........................................................................................................ 124
4.2.1 Live and Deceased Donor Kidney Transplantation .............................................. 124
4.2.2 Static Cold Storage and Hypothermic Machine Perfusion in Kidney
Transplantation .................................................................................................................... 125
4.2.3 Standard and Expanded Criteria Donors in Kidney Transplantation.................... 129
4.2.4 Immediate and Delayed Graft Function in Kidney Transplant Recovery ............ 132
4.3 Patient Demographics .................................................................................................. 133
4.4 Density by Area Results ............................................................................................... 135
4.4.1 Density by Area Results Stratified by Transplant Group (IGF and DGF
Combined) ........................................................................................................................... 135
4.4.2 Density by Area Results Stratified by Recovery Group (IGF vs. DGF) .............. 138
4.4.3 Density Results by Association with Post-Transplant Creatinine Decline ........... 138
4.5 Diameter Results .......................................................................................................... 139
4.5.1 Diameter Results Stratified by Transplant Group (IGF and DGF Combined) ..... 139
4.5.2 Diameter Results Stratified by Recovery Group (IGF vs. DGF) .......................... 142
4.5.3 Diameter Results by Association with Post-Transplant Creatinine Decline ........ 142
4.6 Inter-Centroid Results .................................................................................................. 143
4.6.1 Inter-Centroid Results Stratified by Transplant Group (IGF and DGF
Combined) ........................................................................................................................... 143
4.6.2 Inter-Centroid Results Stratified by Recovery Group (IGF vs. DGF) .................. 144
4.6.3 Inter-Centroid Results by Association with Post-Transplant Creatinine Decline 145
4.7 Inter-Lumen Results ..................................................................................................... 145
4.7.1 Inter-Lumen Results Stratified by Transplant Group (IGF and DGF Combined) 145
4.7.2 Inter-Lumen Results Stratified by Recovery Group (IGF vs. DGF) .................... 147

x
4.7.3 Inter-Lumen Results by Association with Post-Transplant Creatinine Decline ... 147
4.8 Parsimony of Image Measurements ............................................................................. 148
4.9 Summary ...................................................................................................................... 150
CONCLUSION ........................................................................................................................... 154
BIBLIOGRAPHY ....................................................................................................................... 158

xi
LIST OF FIGURES
Figure 1.1: Illustration of the nephron and the renal corpuscle ...................................................... 8
Figure 1.2: Illustration of the mechanisms of proximal convoluted tubule reabsorption of water
and solutes ....................................................................................................................................... 9
Figure 1.3: En-face and in vivo images captured by tandem scanning confocal microscopy on the
rabbit kidney ................................................................................................................................. 17
Figure 1.4: Histopathology of ATI ............................................................................................... 20
Figure 1.5: Histpathology of fibrosis ............................................................................................ 22
Figure 1.6: Illustration of the physical changes associated with partial EMT of tubular epithelial
cells (TECs) in the context of IF ................................................................................................... 23
Figure 1.7: Histopathology of interstitial fibrosis, tubular atrophy, and global
glomerulosclerosis ........................................................................................................................ 24
Figure 1.8: Histopathology of arteriolar hyalinosis. ..................................................................... 25
Figure 1.9: Histopathology of focal segmental glomerulosclerosis.............................................. 27
Figure 1.10: Illustration of the three forms of biopsy conducted on kidneys prior to and following
transplant ....................................................................................................................................... 29
Figure 1.11: Illustration of procurement, pre-implantation, and post-reperfusion timing in
relation to periods of warm and cold ischemic time ..................................................................... 30
Figure 1.12: Histopathology in MAPI biopsy scoring .................................................................. 34
Figure 1.13: Representative B-scan captured in the operating room of a donor kidney (pre-
implantation). ................................................................................................................................ 35
Figure 1.14: B-scan of a human kidney with capsular depressions captured ex-vivo prior to
transplant ....................................................................................................................................... 36
Figure 1.15: B-scan of a human kidney with superficial cysts ..................................................... 37
Figure 1.16: B-scan of human kidney with superficial glomeruli ................................................ 38
Figure 1.17: B-scan of human kidney with dense vascular features............................................. 39

xii
Figure 2.1: Diagram of optical coherence tomographgy penetration and resolution in relation to
other imaging modalities............................................................................................................... 43
Figure 2.2 Diffusion weighted MRI of human kidneys following transplant............................... 44
Figure 2.3: Side by side comparison of proximal convoluted tubules visualized by different
methods ......................................................................................................................................... 46
Figure 2.4: Constructive and destructive interference .................................................................. 47
Figure 2.5: Optical coherence tomography B-scans of age-related macular degeneration, diabetic
macular edema, and the healthy retina .......................................................................................... 49
Figure 2.6: System design for time and Fourier domain optical coherence tomography
systems .......................................................................................................................................... 53
Figure 2.7: Mean (box) filters of different windows sizes applied to optical coherence
tomography scan of human kidney ............................................................................................... 55
Figure 2.8: Median filters of different windows sizes applied to optical coherence tomography
scan of human kidney ................................................................................................................... 56
Figure 2.9: Gaussian filters of different sigma values applied to optical coherence tomography
scan of human kidney ................................................................................................................... 58
Figure 2.10: Prewitt operator applied to optical coherence tomography B-scan of the human
kidney ............................................................................................................................................ 60
Figure 2.11: Sobel operator applied to optical coherence tomography B-scan of the human
kidney ............................................................................................................................................ 62
Figure 2.12: Laplacian operator applied to optical coherence tomography B-scan of the human
kidney ............................................................................................................................................ 64
Figure 2.13: B-scan of human kidney before and after contrast stretching .................................. 66
Figure 2.14: B-scan of human kidney before and after adaptive histogram equalization ............ 68
Figure 2.15: Derivatives of image intensity across edges............................................................. 69
Figure 2.16: Prewitt and Sobel edge detection on B-scan of human kidney ................................ 72
Figure 2.17: Canny edge detection on B-scan of human kidney .................................................. 74
Figure 2.18: Laplacian edge detection on B-scan of human kidney ............................................. 76

xiii
Figure 2.19: Otsu thresholding applied to optical coherence tomography B-scan of human
kidney ............................................................................................................................................ 78
Figure 2.20: Local adaptive thresholding applied to optical coherence tomography B-scan of
human kidney ................................................................................................................................ 79
Figure 2.21: Active contour model applied to optical coherence tomography B-scan of human
kidney ............................................................................................................................................ 81
Figure 2.22: Graph cut applied to optical coherence tomography B-scan of human kidney ........ 83
Figure 3.1: 930nm and 1325nm B-scans of the human kidney .................................................... 88
Figure 3.2: Manually segmented 930nm and 1325nm B-scans of the human kidney .................. 89
Figure 3.3: Technician in sterile surgical attire operates a probe draped in a sterile sleeve to
image a kidney ex-vivo (flushed with preservation solution and resting in a bowl of ice on the
OR back-table) .............................................................................................................................. 93
Figure 3.4: Cropped portions of B-scans of donor kidneys with varying capsule and cortex
thickness ........................................................................................................................................ 93
Figure 3.5: Inter-rater segmentation overlay. Representative B-scan independently segmented by
2 manual raters .............................................................................................................................. 98
Figure 3.6: 3D and 2D representation of optical coherence tomography imaging of vessels in the
human kidney ................................................................................................................................ 99
Figure 3.7: Automated image analysis pipeline .......................................................................... 102
Figure 3.8: Empty image detection ............................................................................................. 103
Figure 3.9: Reflection detection .................................................................................................. 104
Figure 3.10: Cortex and adipose ................................................................................................. 104
Figure 3.11: Edge detection for renal capsule ............................................................................ 106
Figure 3.12: Heterogeneity of cortex appearance ....................................................................... 108
Figure 3.13: Cortex segmentation ............................................................................................... 109
Figure 3.14: Lumen segmentation .............................................................................................. 110
Figure 3.15: False regions of interest removal............................................................................ 112

xiv
Figure 3.16: Manual versus automatic segmentation overlay .................................................... 114
Figure 3.17: 3D lumen reconstruction with B-scan and orthogonal sectioning ......................... 117
Figure 3.18: Depiction of methodology for inter-lumen and inter-centroid measurements ....... 120
Figure 4.1: Hierarchy classification of transplant groups ........................................................... 135
Figure 4.2: Box and whisker plots of density measurements ..................................................... 137
Figure 4.3: Box and whisker plots of diameter measurements ................................................... 141
Figure 4.4: Box and whisker plots of inter-centroid measurements ........................................... 144
Figure 4.5: Box and whisker plots of inter-lumen measurements .............................................. 146

xv
LIST OF TABLES
Table 3.1: Intra-rater reproducibility and algorithm performance. ............................................. 115
Table 4.1: Measurements selected by lasso penalized regression modeling as the most relevant to
post-transplant function .............................................................................................................. 148

xvi
ABBREVIATIONS
ACD
AH
AKI
apparent diffusion coefficient
arteriolar hyalinosis
acute kidney injury
ATI acute tubular injury
ATN acute tubular necrosis
CT
CIT
computed tomography
cold ischemic time
CKD chronic kidney disease
DCD donation after cardiac death
DDKT
DGF
deceased donor kidney transplant
delayed graft function
DW-MRI
ECD
diffusion weighted magnetic resonance imaging
expanded (extended) criteria donor
ECM extracellular matrix
EMT epithelial-to-mesenchymal transition
ESRD end stage renal disease
FD-OCT
fMRI
FOV
FSGS
fourier domain optical coherence tomography
field of view
functional magnetic resonance imaging
focal segmental glomerular sclerosis
HMP hypothermic machine perfusion
HR
IF
hazard ratio
interstitial fibrosis
IGF immediate graft function
IRI ischemia-reperfusion injury
KAS kidney allocation system
KDPI kidney donor profile index
KDRI kidney donor risk index
LD luminal diameter

xvii
LDKT live donor kidney transplant
LoG
MAE
MAPI
mPTP
Laplacian of Gaussian
mean absolute error
Maryland aggregate pathology index
mitochondrial transition pore
MRI
NSCC
magnetic resonance imaging
non-selective cation channel
OCT optical coherence tomography
OPTN
ORS
organ procurement and transplantation network
organ recovery system
PCT proximal convoluted tubule
RAM
RMSE
ROI
ROS
random-access memory
region root mean square error
region of interest
reactive oxygen species
SCD standard criteria donor
SCS static cold storage
SD-OCT
SLD
SS-OCT
TA
spectral domain optical coherence tomography
super luminescent diode
swept source optical coherence tomography
tubular atrophy
TD-OCT
TEC
time domain optical coherence tomography
tubular epithelial cell
UNOS
WIT
united network of organ sharing
warm ischemic time

1
INTRODUCTION
Objectives and Specific Aims
The research entailed in this thesis was undertaken to assess the utility of OCT in visualizing
kidney micro-anatomy during transplant, the ability of automated image analysis to produce
measurements from the resulting imagery, and the relevance of these features to post-transplant
function. The objectives of this thesis were divided into four specific aims. These included
development of the initial protocol for capturing OCT images in the operating room during
transplant, development of a strategy for circumventing limitations and bias introduced during
imaging, development of a fully automated algorithm for segmentation of kidney features, and
finally a thorough investigation of the clinical relevance of the measurements produced in this
study. These aims are discussed here in detail here.
• Develop an operating room protocol for pre-implantation and post-transplant OCT imaging of
human kidneys during transplant.
o Define general methodology (i.e. timing during transplant process, sampling strategy)
for practical imaging of human kidneys during transplant
o Refine OCT settings (i.e. wavelength, scale, field of view, A-scan and B-scan
averaging) to optimize resolution, and minimize file size and speckle noise
• Develop a working strategy for sub-sampling of OCT imaging data to identify high-quality
images which contain the anatomical features under investigation, and to remove potential bias
and redundancy incurred by a flawed imaging protocol.
• Develop a robust system for automated segmentation and measurement of microanatomy of the
superficial kidney cortex (namely the proximal convoluted tubules) in OCT imaging data
o Construct a user-friendly system for high-speed manual segmentation of kidney
features
o Enlist multiple trained raters to segment kidney anatomy in an unbiased and
reproducible manner (to establish ground-truth segmentation labels, and to provide
measurements of inter-rater variation)
o Design a layer segmentation program for segmentation of the interface between the
renal capsule and the surface of the renal cortex

2
o Design a signal/noise threshold segmentation program for segmentation of high signal
areas of kidney cortex in B-scans, where micro-anatomy should be reliably discernable
from noisy features if present
o Design a region of interest segmentation program for segmentation and identification
of cross-sections of proximal convoluted tubules
o Extract measurements of anatomical features for analysis
o Perform validation of the proposed segmentation system
• Investigate any potential clinical relevance of segmented features, as evidenced by significant
correlation with post-transplant function
o Partition heterogeneous patient pool into sub-populations to reduce the influence of
variables (e.g., storage method) which may impact the interpretation of kidney
structure morphology
o Investigate measurement trends between transplant groups and patient sub-populations
to determine potential effects of storage method or donor features on visible
anatomical features.
o Investigate recovery within each patient population to determine if correlation exists
between the produced measurements and post-transplant function

3
Contributions of the Thesis
• We provide a comprehensive review of the clinical motivation for evaluating PCT morphology
in the context of kidney transplants, the suitability of OCT for this task, and the requirement
for automated processing of resulting data.
• We introduce core concepts of image processing which have motivated our segmentation
strategies.
• We propose a pipeline for classification, segmentation, and selection of images for analysis.
The proposed framework for analysis sifts through sets of redundant, biased, and
heterogeneous image sets to extract meaningful data which may have clinical relevance.
• We propose a fully automated algorithm for high-speed segmentation and measurement of
kidney microstructures in OCT image sets. The described algorithm performs well, relative to
segmentation by manual raters, despite numerous challenges presented by imaging artifacts,
image noise, heterogeneity in tissue appearance, and heterogeneity in image quality.
• We provide extensive validation of the segmentation algorithm.
• We propose several methods for quantification of PCT features in OCT image sets, including a
proposed correction for the limits imposed by a 2D imaging protocol.
• We explore the clinical relevance of quantified PCT features, address potential redundancy of
measurements, and propose several possible clinical explanations for our findings.

4
Structure of the Thesis
• Chapter 1 of this Thesis provides clinical background, describing the proximal convoluted
tubules (PCTs) which comprise the bulk of the kidney cortex and are readily visible in OCT
imaging, pathology in the kidney as it pertains to graft viability, and current industry practices
for quantifying and assessing viability.
• Chapter 2 provides a technical background, including a review of optical coherence
tomography (OCT), a guide to fundamental image processing strategies, and a brief
introduction to image segmentation within the context of OCT.
• Chapter 3 introduces a transplant-setting protocol for kidney imaging by OCT, and outlines an
image classification, segmentation, and selection pipeline for analysis of OCT kidney imaging
data. Chapter 3 concludes with validation of the segmentation process by direct comparison
with manual segmentation.
• Chapter 4 introduces a framework for categorizing a heterogeneous patient population, and
investigates the clinical relevance of measurements of automatically segmented kidney
microanatomy in OCT image sets within each category.
• This Thesis concludes with a summary of the accomplishments and discoveries of the Thesis,
and proposes future directions for this line of research.

5
CHAPTER 1: CLINICAL BACKGROUND
1.1 Introduction
In this chapter, we introduce the need to explore new markers of donor kidney viability.
We go on to review the proximal convoluted tubules (PCTs) in depth, both in a healthy state and
under duress from ischemic insult or pre-existing conditions like fibrosis. Next, we review
current methods for evaluation of kidney biopsies with special attention paid to the evaluation of
pathology in the PCTs. Finally, we explore the potential utility of an optical kidney biopsy
(namely, Optical Coherence Tomography (OCT)), and introduce features indicative of pathology
which can be revealed by optical biopsy. We conclude this chapter with a brief discussion on
how OCT may reveal many of the features directly assessed in traditional biopsies, but in a
global and non-invasive fashion.
1.2 The Need for Improved Markers of Viability
The number of patients in the US waiting for a kidney for transplant has essentially
doubled each decade for the last 30 years. By 2014, the number of persons in the US awaiting a
kidney for transplant had reached nearly 100,000. Around 3,000 more are added to this list each
month, roughly doubling the number of transplants performed monthly [1], [2]. An aging
population contributes to this trend and likewise contributes to the composition of the transplant
list. As the transplant list has grown, the average age, frequency of diabetes and time on dialysis
for the transplant candidates on the list has grown in tandem. In 2016, close to half of the

6
candidates on the list had been on dialysis for at least 5 years; most will wait at least three and a
half years for a kidney. As they wait their turn, the health of these potential recipients
deteriorates. Nearly 4,000 candidates became too sick for transplant and nearly 5,000 died while
waiting for a kidney in 2014 [1], [3].
While the number of patients requiring a kidney transplant continues to grow, the number
of kidneys available for transplant has remained relatively steady and markedly insufficient. The
supply cannot meet the increasing demand and this disparity grows each year. To combat this,
hospitals have expanded donor criteria to include more ‘marginal’ donors. Requirements for a
kidney to be deemed acceptable for transplant have relaxed such that the donor pool now
includes older donors, donors with pre-existing conditions which may detract from the viability
of the kidney, donor kidneys with suboptimal procurement, and donors with longer periods of
warm and cold ischemia following procurement. The inclusion of these higher risk, expanded
criteria donors (ECD) in the donor pool has been successful in increasing the number of
transplants performed annually but transplant centers still ultimately discard a large portion of
kidneys procured and offered for transplant [4]–[6]. The discard rate for ECD kidneys is nearly
45% compared to just over 10% for standard criteria donor (SCD) kidneys [7].
These discards represent a largely untapped source of potentially viable kidneys which, if
properly utilized, could further widen the donor pool and narrow the gap between kidney supply
and kidney demand. Studies have demonstrated that patients who receive moderately
compromised kidneys live longer and have a higher quality of life than those who remain on
dialysis and wait for a more viable option [8], [9]. Currently there are approximately 17,000 kidney
transplants a year in the United States. It is estimated that this number could be as high as 38,000

7
if more marginally compromised kidneys were considered and the donor pool properly utilized
[10].
Surgeons reference a multitude of factors which contribute to their decision to reject a
kidney. Principal among these are the results of biopsies, which are performed routinely on ECD
kidneys, and are credited as the most frequent reason for discard. The true relevance of these
factors and of biopsy results specifically is contested, with the majority appearing to have little
correlation with graft function following transplant [11]. There is a critical need to enhance
prognostic measures and to explore new ways of gaining insights into the viability of these more
at-risk kidneys.
1.3 Proximal Tubule Morphology and Unstressed Physiology
Nephrons are the functional unit of the kidney and are found in adult kidneys in numbers
of around 1 million per kidney (Figure 1.1). The two main components of the nephron are the
renal corpuscle and the renal tubule. The renal corpuscle is composed of a capillary tuft called a
glomerulus, surrounded by a capsular space (Bowman’s capsule). Filtration occurs in glomeruli
when filtrate passes from the blood through the fenestrated capillary endothelial cells, basement
membrane, and podocytes which make up the glomerulus. Glomerular filtrate enters Bowman’s
capsule and then exits the renal corpuscle via the renal tubule. The renal tubule is composed of
the proximal tubule (which can be further subdivided into the proximal convoluted tubule and
proximal straight tubule), the ascending and descending loop of Henle, the distal convoluted
tubule, and the collecting ducts. As filtrate leaves the renal corpuscle, it enters the convoluted
section of the proximal tubule first. Here, most of the water and salt are reabsorbed, entering the

8
surrounding interstitial space and diffusing into the peritubular capillaries which run parallel to
the renal tubule. Next, filtrate enters the straight section of the proximal tubule, where some
Phosphate absorption occurs. As filtrate moves on to the loop of Henle, concentration or dilation
of filtrate occurs in addition to further sodium, potassium, calcium, and magnesium reabsorption
by the ascending limb of the loop. Finally, filtrate enters the distal convoluted tubule and
collecting duct where the last bit of sodium, calcium, and magnesium are reabsorbed [12].
Figure 1.1: Illustration of the nephron and the renal corpuscle. The
nephron (right) and renal corpuscle (left) are the structural and functional unit
of the kidney, and the point of filtration respectively.
The primary role of the PCTs is in reabsorption of water and solutes from the glomerular
filtrate. Around 1200 ml of blood flow through the kidneys every minute, the PCTs are
responsible for reabsorbing approximately two thirds of the glomerular filtrate. The walls of the
PCTs are composed of simple cuboidal epithelial cells interconnected by tight junctions near
their apical surface. The apical surface of these cells contains a microvillus brush border,

9
designed to maximize surface area so as to optimize reabsorption from the glomerular filtrate.
Interspersed among the brush border membrane are a series of secondary-active sodium-
dependent counter-transporters and cotransporters which, driven by a low intracellular sodium
concentration relative to the luminal filtrate, facilitate the absorption of glucose, amino acids and
other organic solutes into the epithelial cells via their coupling to sodium and diffusion down the
sodium gradient. The reabsorbed solutes are actively expelled from the basolateral surface of the
tubular epithelium by sodium-independent facilitated diffusion where they enter the interstitium
and can move passively into the peritubular capillaries and reenter systemic circulation [13].
Figure 1.2: Illustration of the mechanisms of proximal convoluted tubule
reabsorption of water and solutes.
1.3.1 Na/K/ATPase in Maintenance of the Proximal Convoluted Tubule Sodium Gradient
The low intracellular sodium content (about 1/10th the extracellular environment) and
consequently the gradient which drives the reabsorption process is sustained by active extrusion
of sodium from the basolateral surface of the PCT epithelium into the interstitial fluid [14]. This
feat is accomplished by Na/K/ATPase which present on the basolateral membrane of the PCT

10
endothelium. The Na/K/ATPase exchange 3 intracellular sodium ions for 2 extracellular
potassium ions. The positively charged sodium ions are drawn to the electronegative intracellular
environment and similarly tend to diffuse down their concentration towards the comparatively
low intracellular concentration of sodium. The extrusion process therefore occurs against both an
electrical and chemical gradient [15].
The PCT cell membrane is permeable to sodium and potassium, allowing these ions to
readily diffuse down their electrochemical gradient into and out of the cell respectively.
Maintenance of the low intracellular sodium concentration and high intracellular potassium
concentration therefore must occur not just against the electrochemical gradient but must do so at
a rate that exceeds the passive diffusion of sodium back into the cell. This primary-active process
which in turn drives the secondary-active sodium-dependent apical absorption from the
glomerular filtrate is the largest consumer of energy in the PCTs and as such-the majority of the
cell’s mitochondria aggregate along the basolateral surface to provide ATP for catalyzed
hydrolysis to power this extrusion process. This process is dependent upon a healthy supply of
metabolites and fresh supply of oxygen [16].
1.3.2 Trans-cellular Reabsorption of NaCl and Water
Chloride is primarily reabsorbed into active circulation through leaky tight junctions via
the paracellular route. Chloride can move through the PCT cell as well, via apical Na/Cl and
Na/K/2Cl transporters, piggybacking on sodium’s diffusion down its’ electrochemical gradient.
Chloride also enters the cell through a chloride base-exchanger, driven by the pH gradient
established as hydrogen ions are excreted apically in exchange for Na ions by the NHE3

11
exchanger [17], [18]. In essence, chloride follows sodium into the cell either by direct coupling
or indirectly through gradients established by intake of sodium. Influx of NaCl into the cell is
followed immediately by an influx of water, drawn osmotically through apical aquaporins.
Chloride’s basolateral export from the PCT is similarly occurs through exchangers and
transporters driven by the movement of sodium. Again, basolateral aquaporins permit water to
follow the ionic shift unencumbered. In this fashion, quantities of water up to four times the
volume of the PCT cell pass through it every minute; combined with the passive diffusion of
sodium, chloride and water across leaky tight junctions, this mechanism promotes the
reabsorption of 60-70% of the NaCl and water from the filtrate. Over 25,000 mmoles of sodium
pass through the lumen of the PCTs each day, and of this only 0.4% makes it to urine, meaning
the PCTs are responsible for absorption of roughly 2/3rds of 99.6% of the sodium load or 15,000
to 17,500 mmoles of sodium a day [16].
1.3.3 Aerobic Metabolism in the Proximal Convoluted Tubules Under Normal Physiological
Conditions
Respiration in the PCTs is predominantly aerobic. Metabolites including glucose, lactate,
Krebs cycle intermediates and amino acids arrive via the filtrate and enter the cells of the PCT
via transporters in the microvillus brush border on the apical surface. Absorbed metabolic
substrates enter the Krebs cycle directly through a specific route or are interconverted to another
substrate which then enters the Krebs cycle. Some evidence suggests transporters for some of
these, and subsequently the potential for their absorption, are present to a lesser to degree on the
basolateral surface of the PCT epithelial cells-suggesting they may absorb some portion of these

12
metabolites from the peritubular capillaries. Similarly, fatty acids, one of the main suppliers of
energy to the PCTs, are primarily bound to albumin which does not pass into the filtrate.
Consequently, fatty acids must be drawn into the PCTs from the peritubular capillaries through
the basolateral surface [16].
The PCTs succeed in recapturing 99.8% of the metabolites that pass through their lumen,
and utilize only a minority of this to power Na/K/ATPase in the maintenance of the sodium
electrochemical gradient which drives reabsorption. The cells of the PCT are adaptable in that
they can use any of a variety of metabolic substrates provided in the filtrate or drawn from the
peritubular capillaries. While they exhibit some preference under physiologically normal
conditions, their choice of metabolic substrate is also influenced by their metabolic state,
temperature, pH, the mix of metabolites of which they are provided in the filtrate or peritubular
capillaries.
While the aerobic PCT metabolism is flexible and can utilize whichever metabolic
substrates are most readily available; there are preferences when multiple metabolites are present
simultaneously. Fatty acids are the preferred metabolic substrate for the aerobic PCT. In the
presence of other substrates, fatty acids are selectively oxidated while the other metabolites are
reabsorbed into the bloodstream or utilized as gluconeogenic substrates (the PCTs are an
important site for gluconeogenesis). Oxidation of lactate and ketones provides another
substantial source of energy for the PCT-these substrates outcompete amino acids as targets for
metabolism. Amino acids that enter the glomerular filtrate are almost entirely reabsorbed by the
PCTs; the kidney is able to metabolize glutamine, alanine, glycine, serine and arginine, although
glutamine is the preferred substrate among these. Krebs cycle intermediates are readily utilized

13
for respiration, either by direct entry into the Krebs cycle or entry following interconversion to
another intermediate; chief among these is citrate which under normal conditions provides 10-
15% of the PCTs required energy [19].
Filtered glucose is almost completely reabsorbed in the PCTs but plays very little role in
the aerobic PCT metabolism. While the PCT epithelial cells contain the necessary enzymes to
metabolize glucose, glucose is outcompeted by most other substrates when offered together [20].
Finally, endogenous lipids and glycogen are also readily metabolized by the cells of the PCT.
Glycogen stores in the PCT however are limited and so are quickly exhausted. Even prior to their
exhaustion, endogenous substrates alone can only provide the PCT with a portion of its required
energy.
1.4 Disease/Insult Manifestation in Proximal Convoluted Tubules
1.4.1 Warm and Cold Ischemia in Cadaver Donor Transplants
Kidneys destined for transplant are often procured from non-heart-beating donors
(donation after cardiac death (DCD)). In non-heart-beating donors, there is often an extended
period of warm ischemia prior to any intervention, likely followed by a prolonged period of cold
ischemia as the kidney is matched and transported to the recipient [21]. Multiple studies have
suggested that progressively longer periods of warm ischemia time (WIT) correspond with an
increasing risk of poor graft function and graft failure [6], [22]. This correlation is echoed by
discard rates which increase in parallel with increasing WIT [23].
Following procurement of the kidney, the graft is generally perfused with preservative
and transitioned to cold storage. Preservation solutions first came to use in the late 1960’s and

14
have become indispensable in kidney preservation. University of Wisconsin solution [24], Euro-
Collins and HTK are the three solutions most often in use today. These contain varying amounts
of impermeant osmotic agents, pH and ion buffers, free radical scavengers, calcium antagonists,
colloids, complement regulators and antiplatelet agents. Chief among these in terms of
contribution to extending the viability of the kidney for transplant is the impermeant osmotic
agent [25], [26].
As their name suggests, impermeant osmotic agents cannot permeate the cell membrane
and so remain extracellular where they provide an osmotic force. The osmotic properties of the
extracellular impermeant agents balance the contributions intracellularly of the influx of sodium
caused by hypothermic or ATP-starvation-induced disabling of the Na/K/ATPase [27], [28]. This
prevents water from osmotically entering the cell or draws water out of the cell if swelling has
already occurred [29]. If water is exiting the cell, the rising intracellular potassium concentration
relative to decreasing cell volume will promote potassium’s passive diffusion out of the cell,
further contributing to the extracellular colligative properties osmotic force. Similarly, water
exiting the cell can physically carry potassium with it and achieve the same outcome [30].
Cold ischemic time (CIT) is unavoidable in kidney transplants, and can range from under
an hour (in some live donor transplants) to more than 30 hours. Each hour of cold storage further
reduces the viability of the graft; a kidney stored for 30 hours has a 40% higher change of graft
failure than a kidney stored for 6 hours [31]. Prolonged cold ischemia can also have a synergistic
effect when coupled with periods of WIT, compromising viability of the graft further [23], [32].

15
1.4.2 Induction of Ischemia and Subsequent Shift to Anaerobic Metabolism
The high energy expenditure/requirements of the PCTs make them especially susceptible
to ischemic conditions [33]–[35] . If blood flow to the kidney is restricted, supply of oxygen to
the kidney’s cells is abruptly cutoff; delivery of metabolites ceases and metabolic waste products
from remaining sources begin to accumulate and act to further inhibit energy production. Under
normal physiological conditions, oxygen levels are highest in the kidney’s cortex where
epithelial cells employ an oxygen dependent metabolism. Following induction of ischemia, the
cortex’s relatively large oxygen reserve will sustain aerobic metabolism for a very brief period.
When oxygen reserves are depleted, the cells revert to an anaerobic metabolic state [36], [37].
In the anaerobic state, the aerobically insignificant glucose becomes the primary source
of energy for the PCT cells. The anaerobic metabolism of glucose generates energy by substrate
level phosphorylation: alpha-ketoglutarate dehydrogenase’s conversion of alpha-ketoglutarate to
succinyl-CoA. Similarly, fumarate reductase’s conversion of fumarate to succinate coupled to
the oxidation of quinol to quinone drives electron transport in complexes 1 and 2. These
pathways are markedly less efficient than aerobic glycolysis, producing a fraction of the ATP
and producing lactate as a harmful byproduct. The modest ATP production is insufficient to
support PCT homeostasis, and is further reduced as metabolic substrates, un-replenished by an
active circulatory system, are depleted [35], [38]. In addition to the dramatic reduction in ATP
generation, the hypoxic environment will lead to an increase in ATP consumption. Inhibition of
the electron transfer chain will compromise mitochondrial membrane potential. ATP synthase
will reverse direction in an effort to preserve the membrane potential and will being hydrolyzing
ATP instead of synthesizing it [39].

16
1.4.3 Cellular Edema Following Na/K/ATPase Failure in the Proximal Convoluted Tubules
As osmotic pressure is a colligative property, the number of solutes within the cell
dictates the volume of water within the cell. Potassium ions, which are generally at very high
concentrations intracellularly, are the principal osmotic solute within cells. Macromolecules and
impermeable metabolites which accumulate within the cell contribute little in number to the
osmolality of the cell but their high charge draws a high number of counter-ions which make
more substantial contributions to the cell’s osmolarity. The relative high concentration of sodium
outside the cell, formed by action of the Na/K/ATPase pump which disproportionally excludes 3
cations for every 2 it accumulates, serves to balance the colligative contributions of the
impermeable macromolecules and metabolites and their accompanying counter-ions within the
cell [15], [40].
The high levels of energy required to power Na/K/ATPase and maintain the absorption
process are what make the PCTs so sensitive to ischemic insult [41]. Following induction of
ischemia, the rapid drop in available ATP produces, accordingly, a parallel drop in Na/K/ATPase
performance. Sodium continues to enter the cell apically, diffusing down its electrochemical
gradient, trailed by chloride, through various transporters or the sodium-permeable membrane.
The paralyzed Na/K/ATPase no longer extrudes sodium at a rate matching its entry and so
sodium and chloride accumulate within the cell. With the colligative contributions of the
impermeant intracellular molecules no longer balanced by the active extrusion of sodium, water
osmotically pours in apically and basolaterally through the aquaporins and cellular edema ensues
[27]. Under normothermic conditions (warm ischemia), ischemia leads to edema of the PCTs

17
within seconds (~30s) [42]. Under hypothermic conditions and perfused with preservation
solution, swelling is a much more gradual process.
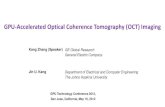
Figure 1.3: En-face and in vivo images captured by tandem scanning
confocal microscopy on the rabbit kidney. (a) The PCTs of the kidney
cortex prior to ischemic insult. The hyper-reflective lining of the tubular
lumen is the microvillus brush border. (b) The PCTs following roughly 40
seconds of normothermic ischemia. Swelling of the cuboidal epithelium has
fully occluded the luminal space. (Snapshots acquired from video provided by
Peter Andrews, PhD).
1.4.4 Ischemia-Reperfusion Injury
Prolonged periods of cold ischemia, and to a greater extent, combined warm and cold
ischemic insult (DCD donors) to the kidney produce a host of deleterious responses which are
further activated upon reperfusion of the transplanted kidney. This effect is referred to as
ischemia-reperfusion injury (IRI). The reintroduction of oxygen into the ischemic kidney
produces a boom in reactive oxygen species (ROS), an inflammatory response, an increase in
intracellular calcium concentrations, mitochondrial dysfunction and various other effects which
contribute to apoptosis and the general dysfunction of the kidney. Upon reperfusion, sub-lethally
damaged cells which may be displaying necrotic symptoms due to prolonged ischemia become
apoptotic [43]–[47].

18
The most dangerous actors during reperfusion are the ROS. While ROS are generated
throughout normothermic and hypothermic ischemia, they are produced in far greater quantities
upon reperfusion and reintroduction of oxygen to the ischemically damaged system. Nitric oxide
synthase and xanthine oxidase are activated under ischemic conditions. Xanthine oxidase acts as
the principal contributor to ROS generation upon reperfusion. Following reperfusion, oxygen
reacts with nitric oxide produced by the ischemically activated nitric oxide synthase and xanthine
oxidase, forming peroxynitrite [43], [48]. Peroxynitrite acts as a highly volatile oxidizing agent,
promoting oxidative stress and further damaging the cell [49].
Under ischemic conditions, cytosolic calcium accumulates at a relatively modest rate.
Free cytosolic calcium doubles within 60 minutes of ischemia. The degree to which calcium is
allowed to accumulate intracellularly is thought to parallel the cell’s movement towards an
irreversible extent of damage [50]. As calcium concentrations rise in the cytosol, the cell’s
mitochondria begin to take up some of this excess. Calcium influx into the mitochondria would
typically lead to formation of a mitochondrial transition pore (mPTP), however the acidic
intracellular environment produced by the byproducts of an anaerobic metabolism serves to
inhibit this process. As pH levels stabilize upon reperfusion, inhibition of mPTP formation
dissipates and the high intra-mitochondrial calcium concentrations induce mPTP opening,
leading to apoptosis [51].
The inflammatory response following reperfusion contributes to the deleterious effects of
IRI. The PCTs of the kidney are stocked with a host of inflammatory mediators, intended for
deployment into the urinary tract if a urinary infection presents. Once triggered, the PCTs
generate and release cytokines and chemokines [46]. Disruptions in the cell surface may pose a

19
target to these mediators of inflammation. Cellular components released during ischemic injury
or upon reperfusion may similarly pose a target for inflammation. In addition to producing
targets for an inflammatory response, the hypoxic state may also impair anti-inflammatory
mechanisms, exacerbating the inflammatory effect by dampening the cell’s response [47], [52].
1.4.5 Acute Tubular Injury
Prolonged periods of warm and cold ischemia are believed to be the main factors
contributing to acute tubular injury (ATI) in the context of renal transplant [53]. The degree of
ATI may be evident prior to transplantation and is considered a valuable tool in assessment and
allocation of the kidney. During transplant, ATI leaves the kidney more susceptible to IRI.
Similarly, the effects of IRI may exacerbate the degree of ATI in the transplanted kidney and
further contribute to acute injury [54], [55]. Consequently, ATI is often identified in kidney
grafts following transplant, and is believed to be an early predictor of poor post-transplant
function [56], [57]
Ischemic ATI manifests morphologically as cell swelling (Figure 1.4a), shedding of the
microvillus brush border, and sloughing of viable and necrotic tubular epithelial cells (TECs)
into the tubular lumen (Figure 1.4b). Under ischemic conditions, cell polarity is disrupted, low
ATP leads to a disruption of tight junction and adherent junction integrity, integrins are
redistributed and cell-cell adhesion as well as cellular adhesion to the extracellular membrane is
compromised. Epithelial cells detach and slough into the PCT where they aggregate, forming
casts, and obstruct filtration (Figure 1.4c) [58], [59]. Similarly, Na/K/ATPase dissociates from its
actin cytoskeletal anchors following ischemic insult; dissolution of membrane polarity facilitates

20
the free moving Na/K/ATPase’s redistribution to the apical surface of the PCT epithelium. This
in turn disrupts the PCT’s ability to effectively reabsorb sodium from the filtrate following
reperfusion [60], [61].
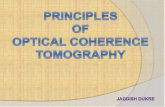
Figure 1.4: Histopathology of ATI. (a) 400x HPS stain showing cell
swelling and apical blebbing (blue arrow) (b) 400x HPS stain showing
epithelial sloughing (black arrow). (c) acid-Schiff stain showing tubular casts
(yellow arrow) (d) 400x HPS stain showing Tubular flattened epithelial cells
(red arrow). [62]
1.4.6 Interstitial Fibrosis
Interstitial fibrosis (IF), or the accumulation of collagen and other molecules which
compose the extracellular matrix (ECM) in the renal interstitium, can serve to provide structural
integrity for surrounding tubules. This can stabilize tubule morphology around locations of
injury, and in doing so help maintain functional structure [63]. This can be advantageous in

21
repairing short-term insults, but with chronic activation, this process can gradually replace
functional renal parenchyma with scar tissue and impact kidney function. IF can accumulate at
the site of severe focal injuries, or more frequently is diffusely represented surrounding regions
of glomerular, tubular, and vascular disease [64]. IF correlates negatively with kidney function
and similarly correlates negatively with graft function and graft survival if a fibrotic kidney is
transplanted [65], [66].

22
Figure 1.5: Histpathology of fibrosis. (a,b) Trichrome stain with
corresponding fibrosis quantification markup. (c,d) Collagen III stain with
corresponding fibrosis quantification markup. (e,f) Sirius red stain with
corresponding fibrosis quantification markup. [67]
Myofibroblasts, tubular epithelial cells, endothelial cells, and immune cells are all
believed to play a role in the pathogenesis of IF. In IF, TECs are believed to undergo at least
partial epithelial-to-mesenchymal transition (EMT). Consistent with the early stages of EMT,
TECs lose their epithelial markers and acquire mesenchymal markers [63], [68]. It remains

23
unclear, however, whether the acquired motility and migratory behavior associated with the later
stages of EMT presents in TECs. In IF, TECs that have undergone partial EMT differentiate into
fibroblasts and contribute to the deposition of collagen and other molecules into the interstitium
[69], [70].
Figure 1.6: Illustration of the physical changes associated with partial
EMT of tubular epithelial cells (TECs) in the context of IF. [69]
1.4.7 Tubular Atrophy
Tubular atrophy (TA) generally occurs in conjunction with IF. TA can refer either to the
loss of individual TECs or entire tubules. In the early stages of TA, TECs lose their brush border
and apical mitochondria. The TECs then undergo tubular simplification (flattening of epithelium
accompanied by dilation of tubular lumen) [71]. Finally, the basement membrane supporting the
TECs experiences wrinkling, inflammatory cells and macrophages invade the cell, and the cell
ultimately scars over [67], [72]. Following TA, cells experience a loss of metabolic activity and
transport functions. TA is generally accompanied by hypertrophy of remaining nephrons to
accommodate the resulting increase in workload [73].

24
In addition to its association with chronic kidney disease (CKD), TA has been associated
with poor graft function in kidneys following transplant [74]. Bunnag et al. found TA (together
with IF) to be the most predictive, out of a dozen features investigated, of poor graft function
[75]. Seron et al. similarly found TA to correlate negatively with graft survival [76]. Similarly,
Cravedi et al. demonstrated a strong association between TA and several specific graft-
threatening reactions, including acute cellular rejection, antibody mediated injury, and chronic
rejection [77]. With respect to long term graft survival, TA and IF are so commonplace and such
definitive characteristics of graft failure that in recent years “IFTA” has replaced the terminology
“chronic allograft nephropathy”.
Figure 1.7: Histopathology of interstitial fibrosis, tubular atrophy, and
global glomerulosclerosis. (a) 200x PAS stain showing
glomerulosclerosis. (b) 400x PAS stain showing atrophic tubules.
1.4.8 Arterial and Arteriolar Narrowing (Arteriolar Hyalinosis/Hyaline Arteriosclerosis)
Vasculopathy has long been considered predictive of poor post-transplant function and
poor graft survival rates. In a study of 280 patients, Seron et al. reported 95% survival in kidneys
where biopsy histology revealed no pathology, 82% graft survival when biopsies showed IFTA
with no vasculopathy, and 41% graft survival when IFTA was identified in tandem with
vasculopathy [67]. Arteriolar Hyalinosis (AH) is defined by the deposition of hyaline into the

25
vascular endothelium or sub-endothelial space, leading to a thickening of the vascular walls and
reduction in luminal space. The reduction in luminal space limits blood flow to the functional
units of the kidney, and in doing so compromises kidney function. AH is found more with
increasing age, and is routinely found in conjunction with other kidney pathology (hypertension,
diabetes, glomerular disease) [78], [79]. While some studies contest the link between AH and
graft function, most assert that it correlates strongly with delayed graft function (DGF) and low
graft survival rates [80]–[83]. In addition, AH may manifest before symptoms of IF, TA, and
glomerulosclerosis, indicating AH as an early predictor of graft viability and valuable feature in
biopsy evaluation.
Figure 1.8: Histopathology of arteriolar hyalinosis. 400x PAS stain of
grade 0 (a), 1 (b), 2 (c), and grade 3 (d) hyalinosis. [84]
1.4.9 Glomerular Sclerosis (Glomerulosclerosis)
Glomerulosclerosis is generally associated with the deposition of matrix into the
glomerular capillary lumen, leading to a loss of function. Non-specific global glomerulosclerosis
(sclerosis of the entire glomerular tuft in non-specific glomeruli) is a common occurrence that
develops with aging. While glomerulosclerosis is considered a hallmark of renal aging, its effects
vary widely between individuals. Kaplan et al. reported a range in the percentage of sclerotic
glomeruli of between 0.2 and 16.7% in kidneys from individuals who were at least 55 years old,

26
and a range of between 1.5 and 23% in kidneys from individuals who were at least 75 [85].
Glomerulosclerosis does not affect whole kidney function to the point of progressing to CKD or
compromising graft viability until the extent of glomerulosclerosis exceeds what would be
expected for the age of the kidney [86].
In 1995, Gaber et al. released their landmark study on the link between
glomerulosclerosis and graft function and survival following transplant. The study reported DGF
in 22% of patients whose biopsy demonstrated no evidence of glomerulosclerosis, DGF in 33%
of patients with less than 20% of biopsied glomeruli sclerosed, and DGF in 87% of patients with
greater than 20% of biopsied glomeruli sclerosed. Incidence of graft loss echoed this trend, with
7% graft loss in patients with less than 20% of biopsied glomeruli sclerosed, and 38% graft loss
in patients with more than 20% of biopsied glomeruli sclerosed [87]. While a handful of studies
contest the correlation between glomerulosclerosis and graft failure, glomerulosclerosis has
remained the most studied feature of the donor biopsy and the most heavily weighted feature in
many biopsy scoring methods [88]. Similarly, discard rates increase in parallel with increasing
degrees of glomerulosclerosis, reflecting surgeons’ confidence in the link between
glomerulosclerosis and graft viability [89].
Focal segmental glomerulosclerosis (FSGS) affects specific glomeruli and only a portion
of the glomerular tuft. FSGS stems from injury or loss of podocytes due to a litany of causes
(genetic mutations, drug abuse, various infections, etc.) [90]. Morphologically, FSGS may
present in several different forms, even within single biopsies, with each variant suggesting a
different prognosis. D’Agati et al proposed a system of classification for these variants in 2004.
This system classified FSGS as either Collapsing FSGS, Cellular FSGS, Tip Lesion, Perihilar

27
Variant or FSGS not otherwise specified. Instances of Collapsing FSGS were associated with the
worst prognosis [79], [91], [92].
Figure 1.9: Histopathology of focal segmental glomerulosclerosis. (a)
Not otherwise specified type with obliteration of segmental areas of the
glomerular capillary tuft by increased matrix. (b) Collapsing type, with
proliferation of visceral epithelial cells and collapse of the tuft. (c) Tip
lesion with adhesion and/or sclerosis at the proximal tubular pole (right).
(d) Cellular, with increased endocapillary cells. (e) Hilar, with sclerosis
with or without hyalinosis at the vascular pole. Stains: part a, periodic acid
Schiff; parts b–e, Jones’ silver. [79]

28
1.5 Visualization of Pathology
1.5.1 Kidney Biopsies
The focus on biopsies as a tool for assessing organ quality has drawn more focus as the
donor pool has expanded to include more compromised kidneys. Increased risk of graft failure in
ECD kidneys necessitates a more comprehensive evaluation of kidneys offered for transplant.
Biopsies offer insight into pre-existing pathologies which may exist in a kidney but not
necessarily present in non-invasive assessment of the donor profile. In 1995, Gaber et al.
demonstrated an association between the degree of glomerulosclerosis in biopsies and the
survival of the graft. Gaber reported that sclerosis in 20% or more of biopsied glomeruli
correlated with a reduction in graft life [87]. Biopsies began to gain prominence following this
and are now conducted on nearly 50% of kidneys procured from cadaver donors. The kidney
allocation system (KAS) implemented in 2014 by the Organ Procurement and Transplantation
Network (OPTN) recommended procurement biopsies for all kidneys classified as ECD or at the
request of the receiving transplant surgeon [93]. In kidneys where histologic abnormalities are
expected or which qualify as ECD, biopsies are conducted on roughly 85% of kidneys offered
for transplant [94]. The scoring of biopsies is a continually evolving process, complicated by
heterogeneity in the kind of biopsy (wedge vs. core), and preparation method (frozen vs.
paraffin-embedded). Assessing scoring strategies is similarly complicated by variance and poor
reproducibility between pathologists in applying each strategy [95].

29
Figure 1.10: Illustration of the three forms of biopsy conducted on
kidneys prior to and following transplant. Advantages and
disadvantages of each method are listed. Dotted lines indicate approximate
position and depth of biopsies, highlighting differences in procured
anatomy from each method. [96]
Transplantation biopsies can be divided in 3 categories: procurement biopsies,
preimplantation biopsies and protocol biopsies (Figure 1.11). Procurement biopsies (also referred
to as “harvest biopsies”) occur immediately following extraction of the kidney from the donor.
This follows any time period associated with extraction of the kidney, and for DCD kidneys also
follows a variable period of warm ischemia. Preimplantation biopsies (also referred to as “zero-
time biopsies”) occur just prior to transplant and following a variable period of cold storage and
cold ischemia. Protocol biopsies occur following reperfusion of the transplanted graft. These can
occur shortly following reperfusion (post-reperfusion biopsy) or months to years later.

30
Figure 1.11: Illustration of procurement, pre-implantation, and post-
reperfusion timing in relation to periods of warm and cold ischemic
time. [96]
1.5.1.1 Procurement Biopsies
Procurement biopsies are the most frequently performed transplant-associated kidney
biopsies. The inherent advantage of the procurement biopsy over preimplantation or post-
reperfusion biopsies is the timing; early evaluation of biopsy pathohistology can influence the
allocation of the organ prior to prolonged periods of cold ischemia incurred during transit [96]. A
donor kidney biopsy can demonstrate chronic changes, as well as the degree of pathologic
deterioration, and help with the assessment of the kidney’s suitability for transplantation.
1.5.1.2 Preimplantation “Zero-Time” Biopsies
Preimplantation biopsies taken at the time of transplant (“zero-time” biopsies) similarly
inform clinicians and are a standard of care in some transplant centers as they reveal early

31
symptoms of graft-threatening pathology [97]–[99]. Little histologic difference is expected
between procurement and preimplantation biopsies. However, if molecular markers of ischemic
damage are evaluated, preimplantation biopsies would reflect the full scope of both the warm
and cold ischemic damage together while procurement biopsies would reflect only periods of
warm ischemia. Preimplantation biopsies occur following transit and so occur too late to affect
allocation. They can however influence last-minute decisions to accept or reject a kidney of
borderline quality for transplant. Similarly, preimplantation biopsies can improve prediction of
post-transplant outcome and so may influence clinical management of the graft. Preimplantation
biopsies may also be used as a baseline for interpreting progression of pathology in later protocol
biopsies [5].
1.5.1.3 Post-Reperfusion Protocol Biopsies
Protocol biopsies are routinely performed at 6 and 12 months following transplant to
assess the health of the graft or identify incidence and form of rejection. Post-reperfusion
protocol biopsies are performed during transplant, following re-anastomosis and prior to skin
closure of the recipient (i.e. while the kidney is still accessible). While post-reperfusion biopsies
occur too late to affect the decision of whether to accept or discard a kidney, they are
advantageous over pre-implantation biopsies in that they reveal the extent of IRI. Koo et al.
demonstrated IRI in post-reperfusion biopsies, evidenced by infiltration of recipient-derived
neutrophils [100]. Haas et al. confirmed this observation and similarly demonstrated donor-
derived neutrophil infiltration [101]. Kanellis et al. similarly demonstrated IRI in post-
reperfusion biopsies, evidenced by acute c-Jun N-terminal kinase JNK activation in tubular
epithelial cells [102]. In each study, cadaver donor transplants were included as models of IRI

32
while live donor kidney transplants were included as controls which did not experience IRI (live
donor kidneys are not subjected to the prolonged cold ischemia which precedes IRI). The time
between reperfusion and the post-reperfusion biopsy is not an established duration and so is
variable between patients. This is a potentially serious limitation of the post-reperfusion biopsy
as this variability may affect the stage of IRI suffered by the graft.
1.5.1.4 Remuzzi Scoring of Biopsies
The Remuzzi scoring system was introduced in 1999. Remuzzi et al. assigned scores for
each kidney from 0 to 3 for each of 4 features. Glomerular sclerosis, TA, and IF were rated from
0 to 3 where 0 indicated absent pathology, 1 indicated <20% of biopsied physiology affected, 2
indicated 20 to 50% affected, and 3 indicated more than 50% affected. Arterial and arteriolar
narrowing were similarly rated from 0 to 3 where 0 indicated absent narrowing, and 1 to 3
indicated varying degrees of increased wall thickness relative to the diameter of the lumen. The
final score ranged from 0 to 12, with cumulative scores from 0 to 3 considered mild, scores from
4 to 6 considered moderate, and scores from 7 to 12 considered severe pathology. Kidneys with
mild, moderate, and severe ratings were recommended for single, double, or no transplant
respectively. This scoring system was suggested to promote efficient use of an expanded donor
pool as evidenced by graft survival, however sampling in the study was limited (24 recipients of
2 marginal kidneys and 48 recipients of kidneys from standard donors) and the score was not
validated on an independent population [103].

33
1.5.1.5 MAPI Scoring of Biopsies
In 2008, Munivenkatappa et al. proposed an alternative scoring system, the Maryland
Aggregate Pathology Index (MAPI). Munivenkatappa et al. utilized cox proportional hazard
methods to identify histological features which correlated with graft loss. Variables found to
demonstrate significant correlation included percentage of glomerulosclerosis, presence of
periglomerular fibrosis (thickening, wrinkling and reduplication of Bowman’s capsule), vascular
pathology (ratio of arterial wall to lumen), presence of AH (amorphous, homogenous
eosinophilic deposits in the wall of arterioles), and presence of scarring (sclerosis and renal
parenchymal fibrosis and atrophy of 10 tubules or more). The hazard ratio (HR) of each feature
was rounded to the nearest integer, and all rounded ratios summed to produce a cumulative score
of 0 to 15 “MAPI points”. A MAPI score of 0 to 7 was designated as representative of a kidney
with a low risk of graft failure. A score of 8 to 11 was designated as intermediate risk, and a
score of 12 to 15 was designated as high risk. Low, intermediate, and high risk kidneys were
associated with 10%, 37% and 47% graft failure at 5 years post-transplant [104].

34
Figure 1.12: Histopathology in MAPI biopsy scoring. (a) Periglomerular
fibrosis, (b) arteriolar hyalinosis, (c) scar including features of interstitial
fibrosis, tubular atrophy and glomerulosclerosis, and (d) measurements for
arterial wall-to-lumen ratio (WLR) calculation, including the thickness of two
opposing walls (T1 and T2) and the luminal diameter (LD). WLR=(T1
+T2)/LD. [104]
1.5.1.6 Banff Scoring of Biopsies
In an effort to standardize biopsy scoring and interpretation, a coalition of renal
pathologists, nephrologists, and transplant surgeons met in Banff, Canada in 1991. The Banff
group initially worked to refine criteria for assessment of post-transplant biopsies in diagnosis of
instances of rejection. In 2010, a Banff working groups was established to similarly refine
criteria for assessment of procurement biopsies [99], [105]. They continue to meet at regular
intervals to consolidate terminology, scoring, and classification criteria [106]. The Banff working
group on procurement biopsies initially conducted a mass survey in 2011 of pathologists to
establish areas of focus. In 2017, a follow-up Banff histopathological consensus criteria for
assessing procurement biopsies was published. This scoring system graded IF, TA, interstitial
inflammation, arterial intimal fibrosis, AH, glomerular thrombi, and ATI as non, mild, moderate,
or severe based on the percentage of relevant anatomy effected [107].

35
1.5.2 Visible and Relevant Features in Optical Coherence Tomography Imaging of the Human
Kidney
OCT imaging (which will be discussed in detail in the next chapter) is an interferometry-
based imaging modality, capable of visualizing the superficial portions of the kidney at very high
resolutions (Figure 1.13). OCT allows us the opportunity to visualize many of the structures
which are assessed and established in traditional biopsies as predictors of poor graft viability.
OCT has the added benefit of being non-invasive, meaning cortex structures can be seen without
the tearing and artifacts introduced by biopsies. Banff criteria for biopsies stipulate that at least 2
areas should be sampled in the kidney to provide an accurate assessment of viability; OCT
allows for global imaging of the kidney so heterogeneous distributions of pathology can be
properly realized [105].
Figure 1.13: Representative B-scan captured in the operating room of a
donor kidney (pre-implantation). (a) The original greyscale B-scan. (b) The
Tegaderm film highlighted in red, the renal capsule highlighted in blue and
the kidney cortex highlighted in green.
The renal capsule is readily visible in OCT imaging. While the thickness of the renal
capsule is not known to coincide with kidney function or graft viability, its structure may offer
insight into pathology. For example, fibrotic scarring in the kidney cortex can induce contraction
and produce depressions or divots in the renal capsule near the point of scarring (red arrow in

36
Figure 1.14) [108]. Assessment of this in kidney grafts or even in-vivo (through laparoscopic
OCT) in patients with chronic kidney disease (CKD) may help in identification and
quantification of fibrosis and the progression of fibrotic symptoms respectively.
Figure 1.14: B-scan of a human kidney with capsular depressions
captured ex-vivo prior to transplant. The red arrow indicates a point of
depression (divot) in the renal capsule which may represent a symptom of
fibrotic scarring. The green arrow indicates a superficial glomerulus.
OCT is also proficient in identifying sub-capsular cysts (red arrows in Figure 1.15). Cysts
are common in aging, especially in persons over 50, and are not generally directly associated
with kidney function [109]–[111]. In some instances, however, the presence of cysts may suggest
polycystic kidney disease, or may promote incidence of renal cell carcinoma in the recipient if
transplanted [86], [112].

37
Figure 1.15: B-scan of a human kidney with superficial cysts.
Particularly in kidneys from older patients, cysts often appeared in the
superficial cortex and were often numerous within a single kidney. Cysts
ranged in size but were routinely flush with the capsule-cortex interface.
In the study described in this Thesis, Glomeruli appeared in the OCT imagery in less than
half of the kidneys imaged. The number of visible glomeruli varied widely between kidneys, and
the depth of the glomeruli greatly affected distinguishable features (Bowman’s space, and the
capillary tuft) (Figure 1.16). While glomerulosclerosis is accepted as an important feature relative
to graft function, little information is available on the relevance of only superficial glomeruli to
graft function.
In more superficial glomeruli, where resolution was improved, collapsing FSGS seemed
to be apparent in certain kidneys (red arrow in Figure 1.16). In these instances, the glomerular
tuft appeared shrunken while the capsular space of Bowman remained fully dilated. In contrast,
many glomeruli appeared with a large capillary tuft which nearly occupied the full capsular
space of Bowman (green arrow in Figure 1.17). A 3D protocol would be advantageous in

38
evaluation of this pathology; 3D imaging of glomeruli would provide accurate measurement of
the size of capillary tufts relative to the surrounding capsular space of Bowman.
Figure 1.16: B-scan of human kidney with superficial glomeruli. The
green arrow indicates superficial glomeruli, the red arrow indicates what
is likely a collapsed capillary tuft, indicative of collapsing FSGS.
In some cadaver donor kidney transplants imaged, bright sub-capsular features were
noted. These were diffuse throughout the cortex, but represented globally throughout each of the
3 kidneys. While it is challenging to tell from 2D image sets, the bright features appeared to be
vascular; the features appeared somewhat linear relative to the convoluted nature of the proximal
tubules, and the diameter appeared larger than what would be expected in PCTs. This may
represent some vasculopathy, potentially arteriosclerosis. Similarly, diameter measurements of
vascular lumen present in OCT imaging may provide a non-invasive method of quantifying
arteriolar narrowing.

39
Figure 1.17: B-scan of human kidney with dense vascular features. B-
scan from one of 3 kidneys which exhibited dense vascular features (red).
The green arrow indicates a glomerulus.
Capsular depressions, subcapsular cysts, glomeruli and vasculopathy evident in OCT may
provide valuable insight into pre-existing pathology within a donor kidney. These features,
however, are not visible in every kidney (with the exception of the capsule), and were not the
direct objective of this thesis. The PCTs occupy the majority of the superficial kidney cortex, and
so are readily available for imaging by OCT. Abnormalities in PCT morphology may also
represent symptoms of ischemic insult in addition to pre-existing pathology, making them an
ideal candidate for analysis.
1.6 Summary
OCT imaging of the superficial cortex reveals primarily the lumen of the PCTs and some
other features (distal convoluted tubules, glomeruli, vasculature, and superficial cysts) in less
frequency. Visualization of PCT lumen is sufficient for evaluation of much of the pathology
assessed in traditional biopsies; reduction in the area of tubular lumen may suggest PCT swelling
while dilation of the tubular lumen could suggest tubular simplification, partial EMT,
hypertrophy, TA, or epithelial sloughing. Similarly, distances between adjacent tubular lumen

40
may offer clues as to accumulation of interstitial pathology. Areas where no lumen are apparent
may reflect atrophied or fibrotic regions of the kidney, although this is purely speculative.
Identification of pre-existing pathology (e.g., IFTA), made visible by OCT at the time of
procurement, may guide procurement biopsies towards regions of pathology. Similarly, OCT
may help in interpretation of traditional procurement biopsies by providing pathologists with a
global distribution of pathology which they have identified in biopsies captured locally. Used in
tandem with traditional procurement biopsies, or potentially independently, OCT can provide
surgeons and pathologists with a better assessment of pre-existing pathology in kidneys at the
time of retrieval and so can aid in kidney allocation.
While pre-implantation (zero-time) biopsies are infrequent, OCT may similarly aid in
their interpretation. As with procurement biopsies, OCT may be able to guide pre-implantation
biopsies towards sites of pathology (e.g., ATI) and/or offer a global view of the distribution of
pathology seen in pre-implantation biopsies. Pre-implantation OCT could similarly be used
independently, offering surgeons a non-invasive indication of pre-existing pathology and
ischemic damage. While this would all occur too late to effect allocation of the kidney, this
information could factor into last-minute decisions to accept or reject a kidney and could inform
post-operative diagnoses and care.
If the degree of ischemic damage could be accurately determined prior to transplant from
symptoms of ATI (swelling, simplification, etc.), the degree of IRI which would ensue following
reperfusion could be ascertained. This measure could provide a predictive value for DGF.
Predicting IRI-induced DGF in this fashion could prove useful in diagnosis following transplant,

41
allowing physicians to distinguish between delays in recovery due to ischemic damage from
delays in recovery due to an immune response. This distinction could support the use of less
nephrotoxic immunosuppressant in patients experiencing a delay in function (i.e. alternatives to
calcineurin inhibitors)[113]. More importantly, an accurate measure and quantification of the
accumulation of factors from ischemic damage that would contribute to IRI could enable a
widening of the donor pool through inclusion of kidneys which based purely on the duration of
cold and warm ischemia would normally be discarded for an assumed degree of ischemic
damage but which may still be viable due to an increased resistance to ischemic insult relative to
the mean kidney or due to some undetermined variable.
OCT imaging performed following transplant may similarly highlight pre-existing
pathology, and ischemic damage. Reduction in ischemic swelling following reperfusion may
unveil pathology hidden prior to reperfusion, allowing more accurate assessment of the graft. In
addition, the dissipation of swelling would provide a benchmark of native lumen structure from
which to gauge ischemia-induced swelling visualized in pre-implantation OCT scans. In
addition, OCT imaging post-transplant may reveal inflammatory effects associated with IRI,
which again may inform post-operative diagnostics and care.

42
CHAPTER 2: IMAGING AND IMAGE PROCESSING
2.1 Introduction
We open this chapter with a brief introduction to non-invasive imaging modalities used in
the context of kidney transplantation. Next, we provide an introduction to OCT: offering an
overview of the guiding principles behind interferometry, discussing the different forms of OCT,
and highlighting medical fields where OCT has found use. We then provide an introduction to
image processing: we summarize several common pre-processing steps, including image
smoothing and contrast enhancement, we go on to summarize several common strategies for
edge and region detection, and then explore their use in the segmentation of OCT images. We
conclude this chapter with a brief discussion on the advantages of OCT over other imaging
modalities for assessing donor kidney viability, and a brief discussion on the motivation behind
selection of specific image processing tools for segmentation of OCT images of human kidneys.
2.2 Non-Invasive Imaging Modalities Used in Kidney Transplantation
Non-invasive imaging of kidneys prior to and/or following transplant may provide a
valuable supplement to current measures of viability. Distinct advantages of non-invasive
imaging modalities over biopsy are: reduced risk of dangerous complications, global assessment
to remove biasing of patchy pathology, and removal of artifacts and perturbations to anatomy
incurred by sectioning and slide preparation. Several non-invasive imaging modalities, each with
their own benefits and drawbacks, have been introduced into the kidney transplant arena.

43
Magnetic resonance imaging (MRI), high-resolution computed tomography (CT), ultrasound,
OCT, and confocal microscopy have all been used in some capacity to aid in the assessment of
transplant kidneys. Some of these have been used, with varying success, in attempts to visualize
pathology at a macro level. Others have been used and are now commonplace in guidance of
protocol biopsies into the kidney cortex of a transplant recipient. Each modality carries with it a
penetration and resolution trade off. Consequently, modalities which can image more of the
kidney tend to lack the resolving power to discriminate finer features. Conversely, modalities
which can reveal fine kidney microstructure tend to be limited in the area that can be imaged
(Figure 2.1).
Figure 2.1: Diagram of optical coherence tomographgy penetration
and resolution in relation to other imaging modalities. [114]
MRI has been used in kidney transplantation primarily to assess graft function in
recipients following transplant. Hueper et al. used functional magnetic imaging (fMRI), with T2

44
mapping and diffusion weighted imaging (which measures the displacement of water in tissue) to
evaluate edema in the preserved mouse kidney. Using T2 mapping they were able to characterize
the water content within various sections of the kidney and did observe significant swelling in
the outer and inner medulla following 45 minutes of normothermic ischemia [115]. Steiger et al.
similarly investigated diffusion weighted MRI (DW-MRI) in the assessment of kidneys. Steiger
et al. employed a combination of qualitative and quantitative assessment of transplanted kidneys,
using the apparent diffusion coefficient (ADC) as a marker and mapping of potential pathology
(ADC reveals the magnitude of diffusion of water in the sample) in the transplanted kidney
(Figure 2.2) [116].
Figure 2.2 Diffusion weighted MRI of human kidneys following
transplant. Upper row: Patient in the “normal or mild histopathologic
changes” group with mild histopathologic changes showing a homogenous
ADC and fmap. Lower row: Patient in the “severe histopathologic changes”
group with an acute tubular necrosis and a BK virus nephropathy showing a
heterogeneous ADC and f map. On morphologic T1w and T2w images the
kidneys of patients in the two groups cannot be distinguished. [116]
CT and ultrasound have both been used in the kidney transplant arena. Both modalities
have been employed to guide protocol biopsies, although ultrasound has emerged as the industry

45
standard. Standards for adequacy of biopsy specimen set forth by the Banff ’97 conference
required that biopsies contain 10 or more glomeruli and at least 2 arteries [105]. The most
common strategy to achieve this standard is with the cortical tangential approach. In the cortical
tangential approach, CT or ultrasound are used to guide placement of the biopsy needle into the
kidney cortex, parallel to the renal capsule. This is intended to maximize cortical tissue sampled,
and to avoid puncture of the renal collecting system and large vascular structures. This method
does not direct the biopsy towards any site of presumed pathology and does not specify a
standardized location on the kidney where the cortical tangential biopsy should be captured
[117], [118].
Tandem scanning confocal microscopy has been used previously by Andrews et al. to
diagnose animal models of ischemia-induced acute tubular necrosis (ATN) by visualization and
quantification of swelling of the PCTs. The tandem scanning system however is costly, highly
impractical in an OR setting and lacks the penetration depth to visualize past the renal capsule
which is present in humans and absent in the animal models used [42].
Using OCT, Andrews et al. was able to acquire high-resolution 3D images of the human
kidney cortex and PCTs [119]. While the depth of imaging penetration for OCT is relatively
shallow, the technique proved sufficient to penetrate into the renal cortex. OCT was able, with
8um axial resolution, to accurately visualize the lumen of the proximal convoluted tubules,
permitting accurate measurement of PCT anatomy. This system has the added benefit of being
relatively affordable, portable, and conducive to an OR setting.

46
Figure 2.3: Side by side comparison of proximal convoluted tubules
visualized by different methods. (a) OCT (b) tandem scanning confocal
microscopy (c) frozen biopsy sections and (d) paraffin embedded sections.
2.3 Optical Coherence Tomography
Optical coherence tomography (OCT) is a relatively new imaging modality which can
produce high speed, high resolution depictions of biological structures from the light scattering
characteristics of the target tissue. OCT occupies a niche in the penetration:resolution spectrum
of non-invasive imaging modalities between confocal microscopy and ultrasound. Penetration of
OCT is typically limited to a few millimeters, an order of magnitude less than conventional
ultrasound and further still from the full-body penetrating power of MRI, and X-ray CT. OCT
penetration, however, surpasses that of confocal microscopy (typically limited to a few hundred
microns) by an order of magnitude. OCT can reach micron-level resolution, moderately reduced
compared to confocal microscopy but significantly improved over the resolving power of
ultrasound, CT, and MRI. Like ultrasound, the high speed of OCT permits video rate capture of
tomographs without concern of significant contribution from parasitic motion (e.g., eye
movement in retinal OCT scans). Like MRI and CT, OCT does not require direct contact with
the imaged sample (which is a significant benefit when imaging, for example, the eye of a non-
sedated patient) [120], [121].

47
OCT is an interferometry based modality, analogous to ultrasound, which utilizes light
waves as opposed to sound waves to generate depth-wise profiles of the light scattering
properties of an imaged sample [121].
Interference patterns occur when waves combine. Two waves of the same frequency and
phase will combine in an additive manner with the amplitude of resulting peaks and troughs
being doubled (constructive interference). Conversely, two waves of the same frequency with a
half-wavelength phase shift (i.e., the peaks of one wave match the troughs of the second wave)
will combine in a subtractive manner, essentially cancelling each other out (destructive
interference) (Figure 2.4). Waves with a phase shift of less than or more than a half-wavelength
will produce an interference pattern with a combination of constructive and destructive
interference. The degree of phase-shift can be extrapolated from these interference patterns
[122].
Figure 2.4: Constructive and destructive interference. [123]
OCT takes advantage of this effect by splitting a beam in two, directing some portion of
the wave to a mirror (reference arm) and the remainder to the tissue of interest (sample arm), and

48
combining the waves reflected from each. Assuming the path length of each arm is the same, the
resulting interference pattern should provide information about the light scattering characteristics
of the sample. If the sample was a second mirror and path lengths were equal, reflected waves
would combine constructively. If the sample was tissue which backscatter the wave with a half-
wavelength time delay, reflected waves would combine destructively.
Strong reflection occurs in tissue where the scattering coefficient is high (e.g., collagen),
and at transitions between tissues which slow light at different rates (tissue with different
refractive indices). Weak reflection occurs in media with a low scattering coefficient (e.g., clear
fluids), and over regions with homogenous refractive indices. Collection of scattering properties
at different depths (an axial scan, or A-scan) is accomplished by either Time-Domain or Fourier-
Domain OCT methods. The resulting axial scans are 1-dimensional, and are captured
sequentially in the transverse direction by rotation of the sample arm mirror to generate 2-
dimensional images (B-scan). For 3D tomographs, B-scans are captured sequentially and
combined [121], [124].
Since OCT’s introduction in the early 1990’s, it has found prominent use particularly in
ophthalmology. OCT is able to penetrate through the cornea, lens, and vitreous humor to reach
the retina with little dissipation of signal. Once at the retina, OCT can visualize each retinal layer
with higher resolution than any other non-invasive imaging modality, and can penetrate beyond
the choroidal-scleral junction. OCT enables ophthalmologists to visualize retinal layer thickness,
and fluid filled pathology like cyst formation in macular edema. In addition, OCT can aid in the
diagnosis and progression monitoring of macular degeneration (age and non-age related),

49
diabetic retinopathy, idiopathic serous chorioretinopathy, and a litany of other retinal pathologies
by revealing irregularities in retinal layer thickness (Figure 2.5) [105], [125]–[128].
Figure 2.5: Optical coherence tomography B-scans of age-related
macular degeneration, diabetic macular edema, and the healthy
retina. [129]
OCT has similarly emerged in other fields where desired clinical features are more
superficial (e.g., dentistry, and dermatology). In dentistry, OCT reveals morphology of soft and
hard dental features, and can be used in diagnosis of caries (tooth decay), periodontal disease and
oral cancer. In dermatology, OCT is used to visualize superficial skin layers, facilitating
evaluation and quantification of skin lesions in non-melanoma skin cancers and inflammatory
disease [130], [131]. OCT can also be implemented in an endoscopic or catheter form, enabling
its introduction into interventional cardiology, gastrointestinal endoscopy, laryngology, and
gynecology. Endoscopic OCT is used not just in pathology detection, but in biopsy site selection,
and stent placement [132].

50
2.3.1 Time-Domain Optical Coherence Tomography (TD-OCT)
The simplest and most intuitive to understand form of OCT is Time-Domain OCT. In
TD-OCT, the reference arm is moved along the propagation direction of light, increasing and
decreasing the path length from the beam splitter. Waves from each arm are reflected and return
to combine at the beam splitter. Interference patterns are then generated for waves which
travelled equal path lengths. As the reference arm path length increases, the equivalent optical
distance in the sample arm penetrates deeper into the sampled tissue. Interference patterns of
equivalent path lengths combine at each movement of the reference to form a depth-wise axial
scan.
The complicated part of TD-OCT is in isolating the point where path lengths are equal.
As the path length of the reference arm is increased, the corresponding path length in the sample
moves from superficial to deep. Light is reflected from the deeper location in the sample, but
also reflected from all superficial points which the light passes through. TD-OCT uses properties
of low-coherent light to circumvent this problem. Low coherence occurs when the phase
difference changes over time, a byproduct of waves with different frequencies. Overlain,
sinusoidal waves of different frequencies will align moderately well (low phase shift) near their
source but will line up less and less well (higher phase shifts) at increasing distance and from the
source (until the lower frequency starts to lap the higher frequency). The distance along a set of
waves where the phase shift is minimal can be considered the coherence length. The more
frequencies that are included (the broader the spectral bandwidth), the shorter the coherence
length will be.

51
TD-OCT generally employs a low-coherence semiconductor super-luminescent diode
(SLD) as its light source. When a low coherence light source is split and recombined,
interference patterns are only discernable when the coherence lengths of the two beams are of the
same pathlength. When detecting all returning light from the reference and sample arms
(including light reflected from all depths of the sample), coherence lengths will be in sync for the
reference arm and the light reflected from the equivalent optical distance in the sample. Scattered
light from other depths will be effectively filtered out, allowing TD-OCT to generate a depth-
wise scattering profile.
One important takeaway is that the coherence length of the broadband source determines
the axial resolution; a shorter coherence length means a smaller section of the wave combination
can be isolated, increasing resolving power. Transverse (or lateral) resolution, however, is
independent of axial resolution. Lateral resolution is dependent on the spot size of the focused
interrogating beam, which is in turn dependent on the numerical aperture (ability to gather light
and resolve fine detail) of the focusing lens [124], [133].
2.3.2 Fourier-Domain Optical Coherence Tomography (FD-OCT)
In contrast to TD-OCT, the reference arm of Fourier-Domain OCT systems is immobile
and the light scattering profiles are captured at all axial depths simultaneously. This method is
considerably faster than TD-OCT (50-100x), as it is not limited by movement of the reference
mirror. FD-OCT can be further subdivided into spectral-domain OCT (SD-OCT) and swept-
source OCT (SS-OCT), but both methods rely on the same principal of utilizing Fourier
transforms of frequency spectrums to extract interference patterns at different depths (spectral

52
interference). Different wavelengths respond differently to the refractive indices of imaged
samples; shorter and higher wavelengths move faster and slower, respectively, through tissue (an
effect termed “dispersion”). FD-OCT systems emit a spectrum of frequencies, which at any one
point in time will have high frequencies (lower wavelengths) which travelled further through the
sample than low frequencies over the same amount of time. By emitting a broad range of
frequencies simultaneously or rapidly in succession, FD-OCT produces an interference pattern
for each frequency at varying depths in the sample. Fourier transformation of backscattered light
moves the time domain wave combinations into the frequency domain, and allows interference
patterns to be mapped axially.
In SD-OCT, this range of frequencies is generated immediately prior to detection with a
diffraction grating (splits and diffracts light) and detected by a high-speed CCD (charged
coupled device) line camera (a high resolution spectrometer, or array-type detector which detects
each frequency independently at different locations). In SS-OCT, a tunable narrow linewidth
scanning laser sweeps through a range of wavelengths sequentially, and accumulates the spectral
interference one wavelength at a time with a single detector. SS-OCT generally provides deeper
penetration depth than SD-OCT as well as faster imaging speeds (SD-OCT is limited in scanning
speed by the read-out rate of its CCD line camera). SD-OCT, however, generally provides higher
axial resolution than SS-OCT [121], [124], [126].

53
Figure 2.6: System design for time and Fourier domain optical
coherence tomography systems. [120]
2.4 Image Processing
In signal processing, “filtering” is the act of accepting or rejecting components of certain
frequencies. In image processing, this can be used to accentuate or suppress image features to
facilitate further processing steps or to aid in interpretation of the data. This process cab be
achieved by convolution of a specified filter kernel over the original image, with the product of
the applied filter at each pixel point yielding the value of the corresponding pixel location in an
output (filtered) image. Image filtering can be utilized to smooth (remove noise) or sharpen
(accentuate) edges an image. Smoothing and sharpening operations can be accomplished by
convolution with low-pass and high-pass filters respectively. Low-pass filters iterate over an
image, removing high-frequency while retaining low-frequency features, effectively smoothing
the image. Conversely, high-pass filters iterate over an image, removing low-frequency while
maintaining high-frequency features, effectively highlighting contours in an image.

54
2.4.1 Low-Pass Filter (Blurring Mask)
Medical images are routinely corrupted by variations in intensity values which occur
independently of signal representing anatomical structure. This effect is deemed “noise,” and can
be further subdivided into salt and pepper noise, impulse noise, and Gaussian noise. Salt and
pepper noise produces random instances of both high and low intensity values (i.e. black and
white), while impulse noise contains only instances of high intensity values. Gaussian noise
produces variations in intensity drawn from a normal distribution and are often present as sensor
noise. The presence of noise greatly reduces the efficiency of most edge and region detection
methods. Noise reduction steps are therefore a common prerequisite to any image processing
task. Noise reduction, or smoothing, involves decreasing the dissimilarity between nearby pixels
by averaging values over a localized window.
Low pass filters, or “blurring-masks”, are the foundation of most smoothing strategies.
Low pass filter kernels generally contain only positive values, with all values summing to one.
Kernels are most often odd and symmetric in window size (i.e. 3x3, 5x5, 7x7, etc.). With most
low-pass filters, the larger the window size, the greater the degree of smoothing and noise
reduction in the filtered image. Smoothing operations, however, produce the unwanted side-
effect of edge blurring; this must be considered when choosing the size or type of filter.
Reduction of noise must be balanced with preservation of edge strength to ensure that regions of
interest are discriminable following smoothing [134].

55
2.4.1.1 Mean Filter
The simplest and most intuitive smoothing filter is the mean filter, or box filter. The
mean filter is an example of a linear operator, in that the output is a linear combination of inputs
from the original image. Mean filters convolve a kernel of a specified window size across the
original image, calculating the mean pixel value of the local neighborhood (all pixels in the
specified window size, centered on the target pixel). The corresponding pixel in the output image
receives the averaged value, producing a “smoothed” copy of the original input. While mean
filters are effective in noise reduction, they are particularly insensitive to sharp discontinuities
(i.e., they tend to blur edges more than other filters) [134].
Figure 2.7: Mean (box) filters of different windows sizes applied to optical
coherence tomography scan of human kidney. (a) original unfiltered image
(b) smoothed by a 3x3 mean filter (c) smoothed by a 5x5 mean filter (d)
smoothed by a 7x7 mean filter (e) smoothed by a 9x9 mean filter.
2.4.1.2 Median Filter
Median filters work similarly to mean filters in that they convolve over the image with an
evenly weighted kernel of a specified window size, although they are nonlinear operators. As the
name suggests, median filters then assign median values of local neighborhoods from the input
image to the output image. Median filters are proficient in removing salt and pepper, as well as

56
impulse noise. Median filters remove outlier pixel values but tend to retain image details better
than mean filters, and so produce less blurring and edge deterioration than is seen in mean filters
of identical window sizes [134].
Figure 2.8: Median filters of different windows sizes applied to optical
coherence tomography scan of human kidney. (a) original unfiltered image
(b) smoothed by a 3x3 median filter (c) smoothed by a 5x5 median filter (d)
smoothed by a 7x7 median filter (e) smoothed by a 9x9 median filter.
2.4.1.3 Gaussian Filter
While the choice of filter is unique to the task at hand, Gaussian smoothing is by far the
most frequently used smoothing technique in image processing. Gaussian smoothing is another
linear filter but deviates from mean or median filters in that it performs a weighted average.
Whereas in a mean or median filter, each pixel location from the local neighborhood in the input
image receives an equal weight (e.g., a 3x3 mean filter would produce an output with the sum of
the values of the 9-pixel neighborhood divided by 9), Gaussian filters apply weights to each
pixel’s value based on a Gaussian function centered around the center pixel. The pixel-wise
output of the Gaussian filter is therefore an average of the corresponding local neighborhoods of
the input image, with more weight attributed to the center pixel in each neighborhood and weight
decreasing monotonically with distance away from the center pixel. This method is particularly

57
effective in reducing noise from a normal distribution and tends to retain important features due
to its’ preferential weighting of centered pixels. Finally, Gaussian filters are advantageous in that
they are isotropic, or rotationally symmetric (i.e., weights are applied circularly emanating out
from the center pixel), while mean or median filters generally draw evenly from values spread
across a square neighborhood. This has the effect of not biasing the output image in any one
direction, which is especially important when subsequent steps involve edge detection. These
characteristics make Gaussian filters a very effective and reliable low-pass filter for pre-
processing.
In Gaussian smoothing, the sigma parameter is tantamount to window size in mean or
median filters; sigma determines the width and spread of the Gaussian distribution of weights. A
smaller sigma gives greater weight to the center pixel with more rapidly decreasing weights as
you move from the center pixel. A larger sigma flattens out the distribution of weights; weights
are still greater towards the center pixel but the decrease in weights moving away from the center
pixel is less steep. A smaller Gaussian sigma essentially produces a smaller filter which does less
smoothing but retains more edge structure, while a larger Gaussian sigma essentially produces a
wider filter which does greater degrees of smoothing but leads to loss of fine structure [134],
[135]

58
Figure 2.9: Gaussian filters of different sigma values applied to optical
coherence tomography scan of human kidney. (a) original unfiltered image
(b) smoothed by a gaussian filter with a sigma of 1 (c) smoothed by a
gaussian filter with a sigma of 3(d) smoothed by a gaussian filter with a sigma
of 5 (e) smoothed by a gaussian filter with a sigma of 7.
2.4.2 High-Pass Filter (Sharpening Mask)
High-pass filters, or “derivative masks,” are the foundation for most image sharpening
and edge enhancement strategies. Similar to low-pass filters, high-pass filter kernels are most
often odd and symmetric in window size (i.e. 3x3, 5x5, 7x7, etc.). High-pass kernels, however,
generally contain both positive and negative values, with all values summing to zero. By
including both positive and negative weights which sum to zero in high-pass filters, differences
can be highlighted between pixels which are assigned positive values and pixels which are
assigned negative values (i.e., the output value is greater when there is a stronger disagreement
between pixel values with positive and negative weights). A kernel with a positive central weight
surrounded by negative neighboring pixel weights can accentuate fine structure by highlighting
differences between a pixel with its’ surrounding pixels (e.g., Laplacian operator). Similarly, a
kernel with positive weights on one side of the central pixel and negative weights on the opposite
side can highlight abrupt linear changes in intensity (edges) in an image (e.g., Sobel operator).
Sharpening operations, it should be noted, tend to amplify noise. With most high-pass filters, the
larger the window size, the less the amplification of noisy features. However, larger window

59
sizes tend to reduce the ability of high-pass filters to localize edges. The amplification of noise
can similarly be diminished by first applying a low-pass filter to the original image as a
preliminary step. Application of smoothing filters prior to edge enhancement can, however, also
reduce the ability of high-pass filters to localize edges. The appropriate preliminary smoothing
operations and high-pass filter window size must therefore be carefully considered, as there is a
notable tradeoff between the dampening of noise amplification and edge localization.
There are a wide array of edge enhancing filters which can be generally subdivided into
two categories: first derivative and second derivative filters. Edges occur in an image when there
is a steep gradient in intensity values in a particular direction between adjacent pixels or groups
of pixels. First derivative filters quantify this change in values. This is often accomplished by the
combination of partial derivatives; gradient is calculated in the x-direction (with positive kernel
weights positioned above or below the central kernel pixel, and negative weights positioned
opposite) and y-direction (with positive kernel weights positioned to the left or right of the
central kernel pixel, and negative weights positions opposite) separately and summed [134]. The
Prewitt and Sobel operators are a commonly used examples of this method.
2.4.2.1 Prewitt Filter
The Prewitt filter attempts to estimate the gradient magnitude by assigning equal weights
to pixels on each side of the central pixel. For a 3x3 x-direction operator, this yields a kernel with
central 3-pixel column weights of 0, weights of positive 1 in the column of three vertical pixels
to the left or right of the central pixel, and weights of negative one in the opposite column. This
kernel convolves over the image and produces high output values when there is a strong gradient

60
or large difference between values on the right and left of the central pixel (vertical edge). The
kernel is then transposed and convolved over the image to produce the partial derivative for the
y-direction. The partial derivatives are summed and provide a fair estimate of edge strength in
the original image. Prewitt filters are simple and easy to implement but are highly sensitive to
noise [136].
Figure 2.10: Prewitt operator applied to optical coherence tomography B-
scan of the human kidney. (a) kernels for horizontal and vertical Prewitt
operators (b) gradient output of horizontal Prewitt filter (c) gradient output of
vertical Prewitt filter

61
2.4.2.2 Sobel Filter
The Sobel filter is similarly a first derivative operator which convolves over the original
image producing two partial derivative outputs which sum to produce gradient magnitude
estimates. The Sobel filter deviates from the Prewitt filter by assigning greater weight to pixels at
a lesser Euclidean distance from the central pixel. Using a 3x3 x-direction operator again as an
example, this yields a kernel with central 3-pixel column weights of 0, weights of positive 1,2,
and 1 from top to bottom in the column of three vertical pixels to the left or right of the central
pixel, and weights of negative 1, 2 and 1 in the opposite column. This moderate adjustment to the
weighting scheme has the effect of approximating a Gaussian distribution of weights. As a
product of this effect, the Sobel filter essentially contains a built in Gaussian smoothing filter and
so is less sensitive to noise than, for example, the Prewitt filter.
In addition to estimates of gradient magnitude, both the Prewitt and Sobel filter provide
information about the gradient direction. For example, a 3x3 x-direction Prewitt filter with
weights of negative 1 in the column to the left of the central pixel, weights of zero in the column
of the central pixel and weights of positive 1 in the column to the right of the central pixel
provides an output value with both direction and magnitude of gradient. If the 3x3 neighborhood
in the original image contains intensity values of 10 to the left of the central pixel and intensity
values of 1 to the right of the central pixel, the output of the applied kernel will equal -27 ((-
1x10)+(-1x10)+(-1x10)+0+0+0+(1x1)+(1x1)+(1x1)). The absolute value, 27, provides the
magnitude of the gradient, while the negative sign provides the direction (leftward). Conversely,
if the 3x3 neighborhood in the original image were reversed with intensity values of 10 to the
right of the central pixel and intensity values of 1 to the left of the central pixel, the output from

62
the same kernel would yield 27 ((-1x1)+(-1x1)+(-1x1)+0+0+0+(1x10)+(1x10)+(1x10)). The
absolute value, 27, provides the magnitude of the gradient, while the positive sign provides the
direction (rightward). Gradient direction can be useful when performing edge detection, allowing
users to unify adjacent high gradient magnitude pixels with similar gradient direction [137].
Figure 2.11: Sobel operator applied to optical coherence tomography B-
scan of the human kidney. (a) kernels for horizontal and vertical Sobel
operators (b) gradient output of horizontal Sobel filter (c) gradient output of
vertical Sobel filter.

63
2.4.2.3 Laplacian Filter
Second derivative filters measure the rate of change of first derivatives (gradients).
Instead of reflecting change in intensity values between adjacent pixels or groups of pixels, the
output of second derivative filters reflects the abruptness of the change (i.e. a sudden change in
intensity as opposed to a progressive constant increase or decrease in intensity). The most
frequently used second derivative filter is the Laplacian operator. The Laplacian kernel is
composed of a positively weighted central pixel, surrounded by negatively or zero weighted
negative weights. This generally presents, in for example a 3x3 kernel, as either a central weight
of 8, surrounded by 8 pixels weights of -1, or more often a central weight of 4, with vertically
and horizontally adjacent pixel weights of -1 and corner pixel weights of 0. The Laplacian filter
is isotropic, and so does not require the combination of outputs from transposed kernels.
Consequently the Laplacian filter is computationally less expensive (allows for faster processing
speeds) than first derivative methods. The isotropic nature of Laplacian filters, however, means
that information regarding gradient direction is lost. Second derivative operators, such as the
Laplacian filter, are also highly sensitive to noise relative to first derivative operators. As is the
case with most high-pass filters, a preliminary smoothing with a low-pass filter can greatly
reduce the amplification of noise. Laplacian filters are routinely applied in tandem with Gaussian
smoothing, a method titled Laplacian-of-Gaussian (LoG) [138], [139].

64
Figure 2.12: Laplacian operator applied to optical coherence tomography
B-scan of the human kidney. (a) kernels for diagonal sensitive (left) and
diagonal insensitive (right) Laplacian operators (b) gradient output of the
diagonally sensitive Laplacian filter (c) gradient output of the diagonally
insensitive Laplacian filter.
2.4.3 Contrast Enhancement Techniques
“Contrast” refers to the difference in intensity values between an object and its
surroundings, whereby higher contrast correlates with an increased ability to distinguish objects
or features in an image. Greyscale images generally include an intensity range of 0 to 255 (with 0
indicating absolute black and 255 indicating absolute white). Histograms displaying each
potential intensity value as a bin with each pixel value as an instance provide a visual

65
representation of contrast in an image. Low contrast images exhibit a narrow range of values,
tightly clustered in a histogram. A dark image, for example, will have a narrow range of values
towards the 0 end of the histogram. Conversely a saturated image will have a narrow range of
values towards the 255 end of the histogram. High contrast images exhibit a wide range of values
and span the full width of their histograms. Interpreting an image visually is more manageable
when contrast of the image is optimized. Several techniques exist for enhancing contrast of an
image.
2.4.3.1 Contrast Stretching (Normalization)
Contrast stretching, or “normalization,” is a simple method of enhancing contrast in an
image by stretching a narrow range of values to fit the full range of possible values. In its
simplest form, contrast stretching takes the minimum and maximum intensity values in an image
and stretches them to values of 0 and 255 respectively. Pixel values between the minimum and
maximum are increased linearly to accommodate the stretch. Simply taking the minimum and
maximum as the lower and upper limits for a stretching operation, however, leaves the operation
susceptible to noise. A single aberrant low or high intensity pixel could greatly reduce the
stretch. To guard against this vulnerability, contrast stretch operations routinely plot intensity
values from the original image to a histogram and take the 1st or 5th percentile as the lower limit
and the 99th or 95th percentile as the upper limit [134].

66
Figure 2.13: B-scan of human kidney before and after contrast
stretching. (a) Original B-scan (b) histogram of initial intensity values plotted
across 0-255 intensity range (c) histogram of intensity values after contrast
stretching, plotted across 0-255 intensity range (d) B-scan following contrast
stretching
2.4.3.2 Histogram Equalization
Histogram equalization is a more sophisticated form of contrast enhancement than
contrast stretching. Similar to contrast stretching, the intensity range of the image is widened to
span the full 0 to 255 spectrum. Histogram equalization, however, reassigns value in a
continuous non-linear fashion. Rather than stretching all values equally to fit the full dynamic
range, values are reassigned based on a desired distribution. Histogram equalization attempts to
flatten histograms, stretching values at sharp histogram peaks further apart. This generally

67
provides higher quality enhancement than is seen in contrast stretching, but can in some
instances enhance contrast of image noise while suppressing the contrast of signal [140].
2.4.3.3 Adaptive Histogram Equalization
Adaptive histogram equalization is a localized application of histogram equalization. In
adaptive histogram equalization, an image is partitioned into tiles, and standard histogram
equalization is performed on each tile independently. It is effective in improving local contrast
and edge strength, highlighting detail throughout homogenous portions of the image. Global
reference, however, is lost in this strategy; bright or dark portions of the image are treated as
independent dark or light images, and so contrast enhanced outputs of these tiles will have a
wide dynamic range similar to other tiles even if they were brighter or darker than other tiles in
the original image [141].

68
Figure 2.14: B-scan of human kidney before and after adaptive histogram
equalization. (a) original B-scan (b) histogram of initial intensity values
plotted across 0-255 intensity range (c) histogram of intensity values after
histogram adjustment, plotted across 0-255 intensity range (d) B-scan
following histogram equalization
2.4.4 Edge Detection
Edges in images are represented by abrupt changes in intensity between adjacent pixels.
In medical imaging, edges often reflect anatomical boundaries which may be of clinical
importance. Consequently, edge detection has proven to be incredibly important in many subsets
of medical image analysis. Maps of gradient magnitude and rate of gradient change, generated by
first and second derivative high-pass filters respectively, provide the input for most edge

69
detection strategies. Smoothing prior to first or second order edge detection is required to
alleviate false labeling of noise as edges.
Figure 2.15: Derivatives of image intensity across edges. [142]
2.4.4.1 First Order Derivative Edge Detection
Edge detection using gradient magnitude involves the detection of local maxima or
minima of first derivatives. In a vector that passes perpendicularly over a bright line, intensity
values of the original image increase as the vector approaches the line, and then decrease as the

70
vector moves past the line. The first derivative of this transition in intensity is represented by an
incline where the slope of the rate of change of intensity values is increasing, and a decline
where the slope of the rate of change of intensity values is decreasing.
Edge detection using the rate of change of the first derivative involves the detection of
zero crossings of second derivatives. The second derivative is represented by an incline where
the slope of the rate of change of the first derivative is increasing, and a decline where the slope
of the rate of change of the first derivative is decreasing. The maxima of the second derivative
indicate the point at which the slope of the rate of change of the first derivative begins to
decrease, while the minima of the second derivative indicate the point at which the slope of the
rate of change of the first derivative begins to increase. Zero crossings of second derivatives
occur when the slope of the rate of change of the first derivative is zero and coincide with the
location of the first derivative maxima and minima).
The first derivative indicates the gradient of the original image or the slope of the rate of
change in intensity values along any one point in the vector. At zero, this indicates no change in
intensity values (corresponding to homogenous areas (non-edges) where adjacent pixels are
roughly equal in value). First derivative values move away from zero (either positively or
negatively) when the difference in intensity value between adjacent pixels increases. The greater
the increase in intensity values between adjacent pixels, the higher the first derivative. The
greater the decrease in intensity values between adjacent pixels, the more negative the first
derivative. The maxima of the first derivative indicate the highest gradient magnitude along a
transition from low to high intensity values (i.e., the point along a series of pixels increasing in
intensity where the greatest increase in intensity between a pixel and subsequent pixel occurs).

71
The minima indicate the highest gradient magnitude in a transition from high to low values (i.e.,
the point along a series of pixels decreasing in intensity where the greatest decrease in intensity
between a pixel and subsequent pixel occurs). We can classify these points as edges; gradient
maxima as localization of the sharpest increase in a point of transition between low and high
intensity, and minima as the localization of the sharpest decrease in a point of transition between
high and low intensity.
The gradient extrema (maxima and minima) are extracted from greyscale outputs of first
derivative filters by gradient thresholding. This method transforms a greyscale image with
intensity values corresponding to gradient magnitudes into a binary image--with gradient
magnitudes exceeding the threshold producing an output of one, and all other pixel values
producing an output of zero. This provides a tool for customizing the strength of edge tolerated.
If only strong edges are desired in the binary output, a high gradient magnitude threshold will
only identify gradient magnitudes which extend far above or below zero (i.e., which represent a
strong increase or decrease between adjacent pixel intensity values). Conversely, a lower
gradient magnitude threshold may identify gradient magnitudes close to zero (i.e., which
represent a small increase or decrease between adjacent pixel intensity values). The problem with
gradient thresholding is that it does not specifically identify the single pixel location
corresponding to the maxima or minima. In a single transition from low to high intensity values
in the original image, for example, all resulting gradient magnitudes along the transition which
exceed the threshold will produce a 1 in the binary image. If the maxima exceed the threshold,
the edge will be identified, but all additional pixels along the transition with a gradient
magnitude above the threshold will also be identified. Consequently, gradient thresholding can

72
produce edge lines which are multiple pixels in thickness and require further thinning steps
[134]. This method is routinely applied to outputs of Sobel and Prewitt operators, 2 of the most
commonly used edge detection methods.
Figure 2.16: Prewitt and Sobel edge detection on B-scan of human
kidney. 3x3 (a) Prewitt and (b) Sobel methods applied to a smoothed
(Gaussian, sigma=3) B-scan of human kidney. The output of each edge
detection method is overlaid in green over the original image.
2.4.4.2 Canny Edge Detection
Canny edge detection is the most widely used and arguably most versatile edge detector.
Canny edge detection begins with application of a Gaussian smoothing filter. Window size of the
Gaussian filter is customizable but carries with it the tradeoff of noise suppression for
localization. Larger Gaussian filters will remove more noise, reducing false detection of spurious
edges. Smaller Gaussian filters will leave more noise but reduce the ability of the edge detector
to precisely locate edge points.

73
Following smoothing operations, the Canny edge detector maps gradient magnitudes and
orientations using a first derivative operator (like Sobel or Prewitt). 4 partial first derivative
kernels (horizontal, vertical, and diagonal in each direction) are convolved over the smoothed
image, calculating gradient magnitude and determining edge direction at each pixel location. To
avoid the multi-pixel edge effect of gradient thresholding, the Canny method then employs non-
maxima suppression (i.e., setting to zero all gradient magnitudes that are not local maxima (or
minima)) for edge thinning. Identification of these maxima involves comparison of the gradient
magnitude of a specified pixel to the gradient magnitudes of the previous and subsequent pixel
along the direction of the edge (perpendicular to the length of the edge). If the target pixel does
not contain a gradient magnitude greater than the previous or subsequent pixel, it will be
suppressed.
To remove gradient extrema of low gradient magnitudes (spurious edges), the Canny
edge detector employs hysteresis thresholding. Hysteresis thresholding involves the use of two
threshold limits-upper and lower. Any identified extrema with a gradient magnitude above the
upper threshold is considered a definite edge, and any extrema with a gradient magnitude below
the lower threshold is immediately excluded from consideration. Extrema with gradient
magnitudes between the lower and upper thresholds are identified as edges only if they bridge
the gap between two edges above the upper threshold (a process known as edge-linking). This
process preserves edge continuity along lengths of edge which may vary in edge strength [143].

74
Figure 2.17: Canny edge detection on B-scan of human kidney. 3x3
Canny method applied to a smoothed (Gaussian, sigma=3) B-scan of human
kidney. The output is overlaid in green over the original image.
2.4.4.3 Second Order Derivative Edge Detection
The second order derivative reflects the rate of change of the gradient. At zero, this
indicates no change in the gradient rate (i.e., intensity values are either constant, increasing at a
constant rate, or decreasing at a constant rate). Second order derivatives move away from zero
(either positively or negatively) as the rate of change of the gradient increases or decreases
respectively. The greater the increase or decrease in intensity values between adjacent pixels
relative to the increase or decrease in the previous set of pixels, the higher the second order
derivative. The smaller the increase or decrease in intensity values between adjacent pixels
relative to the increase or decrease in the previous set of pixels, the more negative the second
order derivative. The zero crossing of a second order derivative occurs at transitions from
increasing gradient rate to decreasing gradient rate. In the case of a zero-crossing moving from
maxima towards minima: the zero crossing reflects a point in the original image where there is a
transition from intensity values which are increasing in each successive pixel by larger and larger
increments, to where pixel values are increasing by smaller and smaller increments. In the case
of a zero crossing moving from minima towards maxima, the zero crossing reflects a point in the
original image where there is a transition from intensity values which are decreasing in each

75
successive pixel by smaller and smaller increments, to where pixel values are decreasing by
larger and larger increments. We can similarly classify these points as edges; zero-crossings as
localization of the points of tapering off of gradient rate increase.
Second order zero-crossings correspond in location to first derivative minima and
maxima, but offer the benefit of precision and circumvention of superfluous edge thickness by
gradient thresholding. Zero-crossings can be extracted from greyscale outputs of second
derivative filters by isolation of zero-values flanked by positive and negative values. This
method produces a binary image with zero-crossings producing an output of one, and all other
pixel values producing an output of zero. It is advantageous over gradient thresholding of first
derivatives in that it produces single pixel edges and no edge thinning steps are required. Second
order edge detection, however, is indiscriminate in edge selection. The zero-crossing of the
second derivative offers a location of an edge without quantification of edge strength, prohibiting
thresholding steps to eliminate weak edges. To circumvent this dilemma, first and second order
derivative edge detectors are often used in tandem. First order derivatives provide gradient
magnitude and gradient orientation, while the zero-crossings of second derivatives offer precise
locations of gradient extrema [134].

76
Figure 2.18: Laplacian edge detection on B-scan of human kidney. 3x3
Laplacian method applied to a smoothed (Gaussian, sigma=3) B-scan of
human kidney. The output is overlaid in green over the original image.
2.4.5 Region Segmentation
In image processing, segmentation involves the subdivision of an image into discrete
parts based on similarity or discontinuity in pixel values or local patterns. In medical imaging,
region segmentation can be used to highlight pathology (e.g., tumor or lesion), or to study
normal anatomical structure. Segmentation of pathology may inform diagnosis, help in tracking
of disease progression, and aid in treatment planning and dosing. The wide array of imaging
modalities in use, variations within each modality depending on manufacturer, litany of
structures imaged, and natural and pathological heterogeneity of anatomical structures makes the
choice of region segmentation technique uniquely dependent on the task at hand.
2.4.5.1 Global Thresholding
The simplest and most intuitive form of region segmentation is global thresholding.
Global thresholding involves the installment of a single threshold limit, whereby all pixel values
above the set limit produce a 1 value in the binary output image and all other pixel values
produce a 0 value output. This method performs well when confronted with an image with a
bimodal distribution of intensity values, where one mode represents the object of interest (or

77
foreground) and the other mode represents background. A threshold bisecting these two modes
should perform well in segmenting the object of interest, assuming minimal overlap between
modes. The appropriate threshold can be determined empirically, and can be expected to
continue to perform well if the foreground and background intensity distributions remain the
same in all subsequent images. In practice, however, this is rarely the case. Efficient global
thresholding, therefore, generally relies on automatic selection of an optimal threshold for each
image processed [134].
2.4.5.2 Otsu’s Method
Otsu’s thresholding, a clustering method, is an example of one of the more popular forms
of global thresholding. In Otsu’s method, we iterate through all possible thresholds, and select
the threshold which minimizes intra-class variance, or maximizes inter-class variance (equivalent
effects). Otsu’s method moves along each point in the x-axis of a histogram representing the
distribution of intensity values in an image. At each point, a global threshold is set, dividing the
histogram into 2 classes (above and below the threshold). Each class can be considered a cluster
of values. The goal of Otsu thresholding is to define the threshold which produces clusters that
are as tightly clustered as possible (minimizing intra-class variance) and as far as possible from
the other cluster (maximizing inter-class variance). Adjusting the threshold in one direction of
the other will reduce the spread of one cluster, while increasing the spread of the other. The
intra-class variance is calculated at each point as the weighted sum of the variance of each of the
two classes (the combined spread of both clusters), with weights defined as class probability
computed from the histogram binning and variance defined as the squared deviation from the

78
mean. The point of minimal intra-class variance gives the threshold which maximizes the
tightness of clustering and, conversely, maximizes the separation between clusters [144].
Figure 2.19: Otsu thresholding applied to optical coherence tomography
B-scan of human kidney. (a) Histogram of initial intensity values plotted
across 0-255 intensity range (b) Histogram of initial intensity values plotted
across 0-255 intensity range with red vertical line indicating the Otsu defined
threshold (c) Binary output of Otsu thresholding.
2.4.5.3 Local Thresholding
Global thresholding fails when illumination or signal in an image is unevenly distributed.
In cases where the intensity of the region of interest and/or of the background varies throughout
an image, a single global threshold will either overestimate or underestimate the foreground in
different parts of the image. In these cases, local thresholding is the preferred strategy. Local
thresholding is similar in theory to global thresholding, but involves partitioning the image into
tiles and determining unique thresholds depending on the intensity distribution within each tile.

79
Thresholds within each window can be set by any specified method, including Otsu’s. Similar to
window sizes of low and high-pass filters, tile size can be user-defined and tends to impact
output in a tradeoff fashion. A smaller tile size will produce a threshold based on the intensity
distribution of a limited sampling area, so may falsely identify noise in homogenous areas.
Larger tile sizes limit identification of noise, but move closer towards the problems associated
with global threholding. In addition, as tiles increase in size, the boundaries of segmented
regions tend to increase in tandem. Selection of a tile below or above an optimal size may
produce underestimation or overestimation, respectively, of segmented regions of interest [134],
[145].
Figure 2.20: Local adaptive thresholding applied to optical coherence
tomography B-scan of human kidney. (a) Binary output of local adaptive
thresholding with a 15x15 window.
2.4.6 Active Contour (Snakes)
Active contour models, or “snakes”, are a common strategy employed in region and edge
detection when the approximate shape of the region of interest is known beforehand. Snakes can
be considered a form of curve-level segmentation, as opposed to pixel-level segmentation seen in
thresholding. Snakes are essentially a circular or linear shape, placed by a user near an object or
edge of interest, which expands or contracts to fit the region or edge. They move towards high

80
gradient magnitudes, but attempt to fit image contours smoothly rather than in a jagged pixel-
wise configuration which may traverse more high gradient values.
In the context of active contour models, a snake can be considered a deformable spline (a
function defined by a series of polynomials) constrained by a set of rules governing its flexibility
and affinity towards edges. Snakes operate iteratively to conform to image edges while achieving
a minimal energy state. Energy in active contour models can be decomposed into internal and
external forces. Internal forces represent a user-defined assumption of curve flexibility. This is
independent of image features, and defines only how tolerant the snake will be in terms of
overall curvature and local blebbing. A low internal energy state reflects a relaxed shape (e.g.,
circular form of a rubber band at rest), while a high internal energy state reflects the amount of
energy required to maintain the distortion of the native shape. External forces depend on image
intensity (e.g., image gradient represented by first order derivatives), and are perceived
negatively when summing energy during minimization steps (i.e., E = Einternal – Eexternal). A low
external energy state reflects a curve fit which overlaps with high gradient magnitudes, while a
high external energy state reflects a curve fit which overlaps with low gradient magnitudes.
At each iteration, snakes tighten their fit to the contours of the region or edge of interest
by following the current of the gradient vector flow; a gradient vector field, representing gradient
strengths and orientations as vectors, pulls portions of the snake towards the direction of higher
gradient magnitudes. At each step, the energy of the internal and external energy are summed
until either the minimum energy is reached (further iterations do not reduce total energy) or until
the user-defined iteration limit is reached. The resulting minimum energy snake should fit the
contours of the targeted region or edge as tightly as possible without deviating too far from a low

81
energy shape. In design of an active contour model, there is an obvious tradeoff between
tightness of fit and smoothness. The more inflexible the snake, the less tightly the snake will be
fit to edges. The more flexible the snake, the more the resulting segmentation will deviate from
the assumed shape. Consequently, the user must balance the weight of internal and external
energies depending on the suspected irregularity of the target shape or edge. This segmentation
method is effective and relatively immune to noise, but is computationally exhaustive and
requires user input for each region or edge of interest [146].
Figure 2.21: Active contour model applied to optical coherence
tomography B-scan of human kidney. Green indicates the active contour
segmentation of the renal capsule following 200 iterations. Pink indicates the
active contour segmentation of the kidney cortex following 200 iterations.
2.4.7 Graph Cuts
Graph cuts are another popular segmentation method relying on the principal of energy
minimization used by active contour models. Graph cut segmentation borrows tools from graph
theory to segment foreground from background in an image by assigning energy (or weight) to
pixel connections and finding the least expensive cut of all connections to partition the image. In
graph cut segmentation, a 2-dimensional or 3-dimensional image is treated as a graph, with each
pixel corresponding to a vertices (or node) and each node connected to adjacent nodes by links
(or edges). Edges are generally assigned weights based on differences in intensity (gradient), but

82
some graph cut methods include color and texture components in the weighting scheme. Weights
are intended to promote adhesion of pixels with similar features; edges between nodes with
similar intensity receive greater weights, increasing the cost if these edges were to be cut.
Additional sets of edges with corresponding weights are defined between each node in
the image and two user-specified nodes belonging to the foreground and background (“source”
and “sink” respectively). After the user identifies the source and sink in the original image, edge
weights between each of these nodes and all other nodes in the image are calculated based on the
probability that each node belongs to the foreground or background. This probability value is
based primarily on intensity similarity and distance between nodes. Nodes closer to and
exhibiting similar intensity profiles as the source node, for example, receive a strongly weighted
edge link to the source and a lesser weighted edge link to the sink.
Graph cuts segment foreground from background by seeking out the path through node
edges which isolate the foreground while cutting through the minimum sum edge weight. To
achieve this segmentation, cuts must occur both between edges connecting adjacent nodes and
between the edges connecting nodes to either the source or sink. The cumulative weight of all
edge cuts produces the total energy of the graph cut, and the minimum energy cut is selected for
segmentation. On its own, this method would isolate very small regions of background or
foreground (the sum weight of the cut is proportional to the total number of edges in the cut). To
circumvent this bias, graph cuts utilize a “normalized cut” which penalizes weight sums from
large or small segmentations. Graph cut segmentation is widely used, particularly in
segmentation of 3-dimensional volumes. Graph cuts are computationally efficient relative to

83
active contour models, but again come with caveat that user intervention is required (in selection
of the source and sink nodes) [147]–[149].
Figure 2.22: Graph cut applied to optical coherence tomography B-scan
of human kidney. Green indicates the graph cut segmentation of the renal
capsule. Pink indicates the graph cut segmentation of the kidney cortex. Blue
indicates the graph cut segmentation of PCT lumen.
2.4.8 Segmentation in Optical Coherence Tomography
The segmentation of OCT images carries with it unique medical image processing
hurdles. OCT images are riddled with speckle-noise, granular noise inherent to OCT which can
obscure image quality and deteriorate edge strength. Additionally, since OCT signal is derived
from the light absorption and scattering characteristics of tissue, intensity of the signal will
decline irrespective of tissue properties as penetration into the tissue increases (as less and less
light reaches the tissue due to absorption by superficial tissue). This effect forms a downward
intensity gradient along each A-scan, even in homogenous tissue. Similarly, imaging depth of
OCT is considerably reduced relative to most other imaging modalities. To acquire the maximum
amount of data, the field of view of most OCT imaging protocols extends beyond the maximum
penetrating depth of the OCT system. Consequently, most OCT images include a decreasing
intensity gradient corresponding to a diminishing signal, and a point in each A-scan where signal

84
is replaced entirely by noise in all additional pixels. Finally, high absorption of light by
hemoglobin can induce optical shadowing beneath blood vessels [150].
OCT retinal imaging is routinely captured in 3D volumes, producing massive amounts of
imaging data. To enable ophthalmologists to process this data in a timely and reliable manner,
segmentation algorithms have begun to receive considerable attention. A flood of segmentation
algorithms has emerged over the last 20 years to process retinal OCT imaging data. To deal with
speckle-noise, the majority of algorithms include pre-processing with some form of median filter
or an anisotropic low-pass filter (weighted to smooth horizontally without minimal corruption
vertically of retinal layers) [151]. The first OCT segmentation algorithm, proposed by Hee et al.,
was published in 1995. This method utilized a custom 1D edge detection filter, which iterated
over each A-scan and isolated the two strongest edges [152]. Yang et al. introduced a 2D
approach, utilizing a custom Canny edge detector to detect 9 retinal layers [153]. Since then,
active contour models have emerged as the leading choice for 2D edge detection methods [154],
[155]. Active contour models have proven superior to other 2D edge detectors in both accuracy
and handling of noise. Adaptive thresholding was introduced by Duan et al. for the segmentation
of vessel lumens in OCT scans [156]. Graph cuts have gained popularity, both in 2D and 3D, and
have found use in both layer segmentation and region segmentation of macular cysts [157]–
[159]. In recent years, attention has shifted to OCT retinal segmentation algorithms which utilize
some form of machine learning.

85
2.5 Summary
OCT occupies a special niche on the spectrum of non-invasive imaging modalities. OCT
offers very high resolution compared to all other non-invasive modalities, with the exception of
confocal microscopy. While confocal microscopy has been used successfully to image non-
human kidneys, its poor penetration disqualifies it from use in imaging human kidneys which
contain a relatively thick renal capsule. MRI has been attempted in assessment of ischemic
damage and post-transplant pathology, however, its resolution is too poor to discern any fine
tissue structure and its utility prior to transplant is largely unexplored. CT and ultrasound have
been employed in guiding post-transplant kidney biopsies, however, these again lack the
resolution to discern the kind of fine tissue structure which are evident in traditional biopsies and
established as predictive of post-transplant function. OCT provides penetration adequate to
visualize into the kidney cortex and enough resolving power to be able to discriminate the kind
of anatomical features which are routinely evaluated in kidney transplant biopsies.
Contrast stretching and histogram equalization both prove useful in pre-processing of OCT
images of human kidneys. These contrast enhancement techniques provide normalization of
intensities across a wide range of images, and compensate for the signal dissipation at increasing
imaging depths. Gaussian smoothing is similarly necessary as a pre-processing step for analysis
of OCT imaging of human kidneys. Gaussian smoothing operations proved effective in removal
of speckle noise, and smoothing of discontinuities in edge or region intensity. This enabled
uncorrupted edge and region detection steps.

86
Due to the large size of OCT image volumes, more sophisticated image segmentation
methods which are common to OCT analysis (active contour models, graph cuts) were not
feasible. Both methods generally require substantial user input, which would be exhaustive in
larger image sets and also introduces the possibility of user bias. Similarly, both methods (active
contour models especially) are computationally exhaustive and so would take considerable time
to process imaging data, limiting their practical use in clinical decision making. Canny edge
detection and adaptive thresholding are relatively computationally inexpensive methods of layer
and region segmentation, respectively. Canny edge detection is robust and optimally suited for
segmentation of OCT kidney imaging data where stretches of edge lengths vary widely in
strength and encounter numerous discontinuities. Other first and second derivative edge detectors
lack the precision and consistency in the face of imaging artifacts, discontinuous edges, and
noisy features. Adaptive thresholding is similarly robust, and effective across the wide range of
image gradients and varying intensity profiles which present in OCT kidney imaging data.

87
CHAPTER 3: IMAGE CAPTURE AND ANALYSIS PIPELINE
3.1 Introduction
We open this chapter with a survey of the OCT system specifications, and go on to
explain the motivation and process behind selection of OCT system settings. Next, we introduce
the protocol exercised for imaging human donor kidney in the operating room prior to and
following transplantation. We then introduce the framework for manual segmentation of kidney
features in OCT B-scans, and go on to navigate the automatic segmentation pipeline highlighting
pre-processing, layer-segmentation, and region segmentation steps. Next, we assess performance
of the segmentation algorithm as compared to segmentation by manual raters. Finally, we
introduce measurement methods for segmented kidney features. We conclude this chapter with a
brief discussion on the advantages of high speed segmentation and quantification of kidney
structures in OCT for assessing graft viability.
3.2 System Specifications
3.2.1 930 vs. 1325nm
The majority of scans in this study (92.5%) were performed with a 1325 nm center
wavelength SD-OCT imaging system (Telesto-II, Thorlabs Inc.), with an incident power of 2.5
mW. The Telesto OCT system was equipped with a 36 mm focal length (LSM03, Thorlabs Inc.)
objective, providing a lateral resolution of 13 µm and an axial resolution of 5.5 µm in air. The
remaining scans were performed with a 930 nm center wavelength SD-OCT imaging system
(Ganymede-II, Thorlabs, Inc.) equipped with a LK20 objective, a lateral resolution of 8µm and

88
an axial resolution of 3µm in air. Scans were captured at a rate of 28 kHz (video capture rate), a
sensitivity of 103dB, and an incident power of approximately 2.5µW. OCT scans were captured
using Thorlabs native imaging software, ThorImage 4.1, operated on a 3.6 gHz Dell desktop with
a dual CPU intel processor and 16GB RAM. MATLAB image processing was also conducted on
this desktop.
The higher wavelength Ganymede system provides higher resolution than the Telesto
system at the cost of reduced penetration (Figure 3.1). The Ganymede and Telesto systems were
used in tandem in the initial protocol-optimization phase of this study to determine the
practicality and effectiveness of each system in the imaging of human kidneys. To select the
optimal system for the duration of the study, the cost and benefit of resolution and penetration
differences between the two systems were investigated.
Figure 3.1: 930nm and 1325nm B-scans of the human kidney. (a)
Representative B-scan performed by the 930nm Ganymede imaging system
on an ex-vivo human kidney prior to transplant. (b) Representative B-scan
captured minutes later, performed by the 1325nm Telesto II imaging system
on the same kidney as is represented in (a).

89
Manual segmentation was performed independently by 4 raters on a randomly selected
subset of images from kidneys imaged by both the Ganymede and Telesto systems. Raters were
asked to segment the interface between the renal capsule and the cortex (green in Figure 3.2), and
to segment the depth at which the signal to noise ratio became insufficient to discern any
anatomical landmarks (i.e. lumen of PCTs, glomeruli, blood vessels) (blue in Figure 3.2).
Figure 3.2: Manually segmented 930nm and 1325nm B-scans of the
human kidney. Representative B-scans from the 930nm Ganymede (a) and
1325nm Telesto II (b) with the renal-capsule interface manually segmented in
green and the lowest point of perceptible signal manually segmented in blue.
The distance between the capsule-cortex interface and the signal-noise cutoff was
measured for each A-scan and averaged across all A-scans in each B-scan to produce a measure
of average penetration into the cortex for each image. Penetration depths were averaged for each
kidney imaged by both Thorlabs systems. The Telesto-II system achieved a mean penetration
into the cortex of 278.91µm with a standard deviation of (±) 61µm while the Ganymede-II
system achieved a penetration of 165.66µm ± 38µm into the cortex. The 40.6% reduction in
penetration into the kidney cortex by the Ganymede system was considered a prohibitive
limitation; a wide range of renal capsule and adipose thicknesses between and within kidneys

90
suggested that the Ganymede system may fail to penetrate into the cortex of kidneys with thicker
capsules or higher degrees of adipose. The improved resolution of the Ganymede system
revealed no additional anatomical features (capillaries, interstitial space) and did not demonstrate
sufficient improvement on the resolution of the PCTs to outweigh the limited penetration.
3.2.2 2D vs. 3D (OCT-B versus OCT-C cans)
While the capture of 3D volumes is within the capabilities of both the Telesto and
Ganymede systems, this proved impractical due to the motion artifact suffered by handheld
scanning. Multiple speeds were initially attempted during the protocol-optimization phase of the
study, with lower speeds providing higher resolution and higher speeds offering the appeal of
potential 3D volume capture. 28, 48, and 76 kHz scans were performed on a preserved kidney by
a lab member operating a handheld probe. Resolution of the 76 kHz scans proved to be too poor
to be able to accurately discriminate PCT features. The 48 kHz mode provided considerably
better resolution than the 76 kHz, and may have been sufficient quality for analysis, but was still
limited in its ability to produce reliable 3D volumes during handheld imaging (i.e., motion
artifact induced by hand motion distorted the 3D volumes). 28 kHz was ultimately selected as the
final imaging speed as 3D capture did not appear to be a feasible option, and 28 kHz provided
the highest resolution in B-scans.
3.2.3 Field of View
Field of view (FOV) was similarly modified throughout the protocol-optimization portion
of the study. Initial settings included a large FOV, spanning >8mm in the transverse direction (x-
axis) and nearly 3mm in the axial direction (z-axis). These settings were chosen to maximize the

91
area of kidney imaged but often occupied so much random-access memory (RAM) as to crash
the data acquisition software. Similarly, successful capture at these settings resulted in image file
sizes (>5 GB) which could not be opened without a custom Python addition to the Thorlabs
export code, and which decelerated processing substantially. The FOV was reduced to a 4.9mm
x-axis and 1.9mm z-axis (after adjusting for a refractive index of 1.3). This reduced RAM usage
and file size, preventing further system crashes and enabling practical use of the data files.
3.2.4 Averaging
A-scan averaging was similarly increased to 2 to halve the capture rate and similarly
reduce RAM usage and file size (B-scan averaging was avoided as the motion tied to hand-held
imaging exceeded the speed of the mechanical movement between B-scans and so effected
image quality negatively). A-scan averaging had negligible effect on image quality.
3.2.5 Scale
The minimum provided scale of 2.73µm/pixel was selected for the X-axis to maximize
resolution in this dimension. 3.54µm/pixel was selected as the Z-scale in air, equating to
2.73µm/pixel after adjusting for the refractive index of 1.3 (the 1.3 refractive index was an
estimate provided early in the study by collaborators, post-study evaluation determined the
refractive index of formalin preserved kidney tissue to be closer to 1.4). The synchronization of
the X and Z scales prior to capture enabled export to an analyzable format, without interpolation
or any change to the raw data producing feature loss.

92
3.3 Operating Room Imaging Protocol
3.3.1 Basic Setup
A technician in sterile surgical attire operated a handheld scanner, draped in a sterile
sleeve with a layer of sterile 3M Tegaderm Transparent Adherent Film Dressing affixed to the
focal spacer of the OCT probe (Figure 3.3). A second technician in non-sterile scrubs operated
the ThorImage software, and maneuvered the cart holding the OCT system when necessary.
Image files were saved in the native ThorImage “.oct” format. Prior to processing, images from
original “.oct” files were opened as 32 bit floating tiffs in MATLAB along with accompanying
meta data (x and z scales, FOV, wavelength).

93
Figure 3.3: Technician in sterile surgical attire operates a probe draped
in a sterile sleeve to image a kidney ex-vivo (flushed with preservation
solution and resting in a bowl of ice on the OR back-table).
The renal capsule (Figure 3.4a, b), and adipose tissue present on the kidney surface (Figure
3.4c, d) varied widely between kidnys and between regions on the same kidney. Absorption of the
OCT light by these tissues attenuated the signal, reducing penetration into the kidney cortex
relative to capsule or adipose thickness. This made a global imaging protocol infeasible; thicker
portions of the capsule and areas of high adipose impeded OCT penetration into the cortex.
Figure 3.4: Cropped portions of B-scans of donor kidneys with varying
capsule and cortex thickness. B-scans of kidneys with a thin renal capsule
(a), thick renal capsule (b), small degree of adipose present above the renal

94
capsule (c) and higher degree of adipose present (d). Yellow arrows indicate
the thickness of the renal capsule (a, b) and adipose tissue (c, d).
To quantify the variation and range in in capsule and adipose thickness, manual raters were
asked to measure capsule and adipose thickness at a randomized location on the X-axis in a
randomized set of 1,000 B-scans. The renal capsule ranged in thickness from 44 µm to just over 1
mm with an average thickness of 189.5 ± 108.7 µm. Kidneys often had little or no adipose present
on their surface but in some instances had adipose that exceeded the penetration depth of the OCT
system (>1.9mm). Average adipose thickness across all 1,000 B-scans was 67.2 ± 90.6 µm.
Consequently, technicians were instructed to survey the kidney and image regions where
adipose and the renal capsule both appeared thin (in the preserved kidney, thicker portions of the
capsule and adipose appear grey and white respectively while areas with thin capsule and
minimal adipose appear redder). In these regions, the OCT imaging was more likely to penetrate
further into the kidney cortex and increase the quantifiable area. Within these regions, the
technician was instructed to search for locations where the tubular lumen appeared most dilated
and the number of visible tubular lumen was highest. When a location matching these criteria
had been found, the technician was instructed to continue imaging in that same approximate
location.
The technician was instructed to attempt to keep the interface between the renal capsule
and cortex horizontal across the x-axis of the resulting B-scan, and at approximately 0.5mm
below the top of the B-scan. This method was intended to ensure that the cortex was placed in
the area of best focus with the given OCT settings. Live video-rate capture was advantageous
given this protocol as it allowed for continuous capture during the survey process, ensuring the

95
maximum number of images was obtained. The capsule-cortex interface, however, was often
significantly above or below the 0.5mm target, resulting in out of focus cortex and strong
variations in the intensity of the cortex (the cortex was brighter and tubule lumen were less
apparent when the capsule-cortex interface was significantly above the 0.5 mm mark; the cortex
was darker and tubule lumen again less apparent when the capsule-cortex interface was
significantly below the 0.5 mm mark).
While technicians were able to maneuver the ex-vivo kidney prior to transplant and
position the OCT probe against the kidney in any location, following transplant and reperfusion
the in-vivo kidney was immobile and buried within the body cavity of the transplant recipient.
Depending on the placement of the kidney and the size of the body cavity, this limited the area
which the probe was able to contact from a few square inches to approximately 1/3rd of the
kidney surface area.
As an undesired consequence of the technicians’ instructions and the 2D imaging feed,
there was no indication of where on the kidney each image was captured, how many regions of
the kidney were imaged, or how many images were redundant/duplicates of the same region.
Regions imaged following reperfusion could not be paired with regions captured prior to
transplant for direct comparison. Video-rate capture of the survey process similarly resulted in a
high number of images captured during manual manipulation of the probe. These included
images where the probe was not in contact with kidney, or where the probe was only in partial
contact with the kidney. The kidney often only partially spanned the x-axis of resulting B-scans,
and was often diagonally oriented along the x-axis. Many images contained large amounts of
adipose and occasionally only adipose.

96
3.3.2 Timing of Pre and Post Scans, Multiple Scans
Pre-implantation image sets were obtained ex-vivo following back-table preparation of
the kidney graft and again in-vivo immediately (13 ± 4 minutes) following reperfusion of the
transplanted kidney. Machine perfused kidneys were removed from the perfusion pumps prior to
imaging (i.e. were static at the time image sets were obtained). The time between removal from
perfusion pumps and imaging was not recorded but may have been an important variable; PCT
morphology may change following removal from the pump in a time-dependent manner.
Removal from the perfusion pump was generally conducted immediately prior to preparation of
the kidney graft, suggesting the time between removal and imaging was minimal (involving
primarily the time required to prepare the kidney, roughly ~30min depending on the surgeon,
anatomy of the graft, and the effect of the procurement process on the graft).
Time of access was an additional variable component of the protocol. Prior to transplant,
technicians were granted access to the kidney from the period following the transplant surgeons’
“prep-work” to “off-ice” time when the kidney was removed from the cold saline bath and began
placement into the recipient. For cadaver transplants, generally only a single a transplant team
was involved and the time between “prep-work” and “off-ice” time was extended by the
transplant team’s preparation of the recipient. This time window was generally sufficient for
even a lengthy imaging protocol. For live donor transplants, generally two transplant teams were
active with the donor and recipient in adjacent operating rooms. To minimize ischemic time,
procurement of the kidney graft from the donor is timed to occur only when the recipient is ready
to receive the kidney. In these cases, the window between “prep-work” and “off-ice” time was
minimal and technicians had 1 to 2 minutes to perform pre-implantation imaging.

97
Following reperfusion, some bleeding from the re-anastomosed vasculature was
commonplace. Surgeons were required to address this hastily and before allowing technicians
access to the kidney for imaging. This introduced another variable period: the time between
reperfusion and post-reperfusion imaging. In rabbit studies of ischemic PCTs, swelling
dissipated rapidly following reperfusion [160]. This, however, followed only a short period of
warm ischemia. It is unclear how quickly swelling of the PCTs would dissipate in a human
model, following prolonged cold ischemia in preservation solution. It is possible that the
dissipation of swelling under these circumstances is a more gradual or heterogeneous in which
case the time period between reperfusion and imaging may be an important variable.
Post-reperfusion imaging time was limited in both cadaver and live donor transplants.
While the more damaging period of ischemia had passed by this point, imaging following
reperfusion directly interfered with the progress of the surgery. Technicians were limited to
approximately 1 to 2 minutes for post-reperfusion imaging. Resulting image sets under the
established protocol contained a variable number of images, ranging from roughly 200 to nearly
1,500 images for each pre-implantation and post-reperfusion scan.
3.4 Manual Segmentation
Images were analyzed manually to provide a standard to evaluate performance of the
automatic segmentation and also to produce thresholds for inclusion/exclusion of automatically
segmented PCT lumen. Manual categorization and segmentation of images was performed in
ImageJ (NIH) by 4 trained raters. Pre-implantation and post-reperfusion image sets from the first
150 patients were anonymized, randomly divided into 4 groups, and split between the 4 trained

98
raters. Following manual analysis, 20 percent of the manually segmented images were reassigned
to different raters to produce measures of inter-rater variation (Figure 3.5).
Manual segmentation was performed on 5 randomly selected images from each image set.
Raters segmented the interface between the renal capsule and the cortex (upper red and blue lines
in Figure 3.5). Raters also segmented the full volume of quantifiable cortex (the area of cortex
beneath the capsule where the signal appeared sufficient to discriminate anatomical features) (area
between upper and lower red and blue lines in Figure 3.5). Raters then segmented all regions which
appeared to be cross-sections of PCT lumen, using the ImageJ “Versatile Wand” plugin [161] (red
and blue selections in Figure 3.5 with cyan indicating overlap). If a randomly selected image
contained no quantifiable cortex, the image was skipped and the reason for exclusion was tallied
as either “empty” with no contact between the probe and kidney, “high reflection,” or “high
adipose.”
Figure 3.5: Inter-rater segmentation overlay. Representative B-scan
independently segmented by 2 manual raters. Selections by the first rater
are indicated in red while selections by the second rater are indicated in blue.
Cyan indicates an overlap in selection by both raters
Manual raters were instructed to avoid segmenting structures which they could not
reliably determine to be the lumen of PCTs (i.e., blood vessels, cysts, glomeruli). This is

99
admittedly a challenge, particularly with respect to blood vessels, when raters are limited to a 2D
view of the kidney cortex. In the attached en-face view of a 3D reconstruction of an OCT scan
performed on a preserved human kidney, vessel lumen (labeled in red in Figure 3.6) and PCT
lumen can be more reliably distinguished.
Figure 3.6: 3D and 2D representation of optical coherence tomography
imaging of vessels in the human kidney. (a) Reconstruction of a 3D OCT
scan performed on a preserved human kidney, with suspected vessels
highlighted in red (b) OCT B-scan with suspected vessels (middle, right) (c)
OCT B-scan with suspected vessel (left).
PCT features were defined, by a kidney anatomy and histology expert involved in the
study (Dr. Peter Andrews), as having high tortuosity and a lumen diameter within an
approximate range. “Straight and elongated” were features used not independently, but in
combination with lumen diameter to discriminate blood vessels. While some cross-sections of
PCT lumen create straight and elongated features, these are most often shorter or curved due to
their high tortuosity and are lower in luminal diameter relative to vessel lumen.

100
3.5 Automatic Segmentation
3.5.1 Automatic Analysis Pipeline
Automatic segmentation was executed in MATLAB R2017b (Mathworks, Inc., Natick,
MA, USA). To remove user bias and to improve feasibility of clinical application, automatic
segmentation and analysis was performed on the original full 2D video image sets and not
manually selected subsets of images.
In addition to the issues in image sets incurred by the imaging protocol, speckle noise
intrinsic to OCT coupled with imaging artifacts derived from anatomical heterogeneity and OCT
system issues confounded automatic segmentation. Most B-scans captured contained varying
degrees of reflection, which presented as bright vertical stripes. Reflection varied between
different images captured in the same image set and varied significantly between scans, likely
due to issues with the OCT system (bending of the fiber-optic cable during manipulation of the
OCT probe, or a loose or overly tight connection of the fiber-optic cable to the OCT base station)
or characteristics of the sample (light scattering characteristics of objects in the FOV may have
caused reflection). Conversely, shadowing was a routine artifact. Shadowing generally resulted
from obstruction of A-scans into the kidney cortex by an abnormal feature present on the surface
of the renal capsule. Large globules of fat often limited penetration into the cortex along
corresponding A-scans but not adjacent A-scans which were not intercepted by fat globules.
Resulting B-scans had a discontinuous renal capsule edge and heterogeneous penetration into the
cortex. Similarly, variations in adipose and the thickness of the renal capsule created an uneven
penetration into the cortex both between images and along the x-axis of each image. Sub-
capsular features with low refractive indices (vessel and PCT lumen, capsular space of Bowman,

101
cysts) limited penetration less than features which produced positive space and so led to an
increase in total depth of penetration into the cortex at these locations, increasing heterogeneity
of penetration depth across the x-axis.
To circumvent the litany of imaging hurdles presented by the protocol, imaging artifacts,
and heterogeneity in kidney appearance, a pipeline was devised for processing of image sets. To
expedite analysis and prevent error, it was necessary to remove images from processing which
contained no quantifiable cortex. Features were extracted and compiled from images skipped and
marked during manual analysis. These features were utilized to classify and exclude empty, high
reflection, or high adipose images prior to performing more computationally expensive sections
of the algorithm (Figure 3.7, blue tier 2).
Following moderate pre-processing, layer segmentation was performed to segment the
interface between the renal capsule and the kidney cortex, the area of high signal quantifiable
cortex was identified and segmented, and potential lumen cross-sections were segmented and
classified as PCT lumen or non-PCT lumen cross-sections (Figure 3.7, blue tier 3). Finally, the
density of lumen area (based on the criteria assigned to technicians for regions to target and
hover over) was calculated for each image, and the single B-scan with the maximum density
value was used for analysis (Figure 3.7, blue tier 4).

102
Figure 3.7: Automated image analysis pipeline.
3.5.2 Empty B-Scan Detection
While a threshold of total intensity values would be an intuitive and high-speed approach
to detection of empty B-scans, variations between empty images in background intensity, imaging
artifacts and hyper-reflectivity of Tegaderm disallowed this strategy. Empty images were therefore
identified by their average standard deviation in intensity values across the z-axis. For each B-
scan, the standard deviation of intensity values across each A-scan was taken and all A-scan
standard deviations for that B-scan averaged. This process was repeated for all images marked
during manual analysis as “empty” (Figure 3.8a), and for all images which had cortex present and
were manually segmented (Figure 3.8b). Comparison between these two groups demonstrated that
a mean A-scan standard deviation of 47 or less correlated highly with images categorized as
“empty” while a mean A-scan standard deviation above 47 correlated well with images which
contained kidney (Figure 3.8c). A standard deviation cutoff of 47 identified empty images with a
sensitivity of 83.28% and a specificity of 98.91%.
Full Image Set
Quantifiable Cortex
Capsule-Cortex Interface
Segmentation
Cortex Segmentation
Lumen Segmentation and
Classification
Final Measurements Extracted from
Highest Density B-Scan
Empty B-Scan
High Reflection
High Adipose

103
Figure 3.8: Empty image detection. (a) Section of a B-scan with no kidney.
The white horizontal lines in the bottom third of the image result from the
Tegaderm. The vertical arrow represents the location of a single A-scan with a
corresponding standard deviation in intensity values of 34.3. The average of
all A-scans across the image is 37.8. (b) Section of a B-scan with kidney. The
vertical arrow represents the location of a single A-scan with a corresponding
standard deviation in intensity values of 56.1. The average of all A-scans
across the image is 58.4. (c) Histogram representing the average standard
deviation of all images manually marked as empty (blue) and all images
which contained quantifiable cortex and were manually segmented (red).
3.5.3 Reflection Detection
Bright vertical stripes due to strong reflection were a frequent imaging artifact which
interfered with several segmentation steps and in some instances rendered images impossible to
analyze (Figure 3.9a). To isolate and quantify these stripes of reflection, a horizontal filter was
applied to each image to provide an estimate of the image without the reflection (Figure 3.9b).
Reflection stripes were then defined as A-scans from the original image whose average intensity
exceeded a global threshold above the corresponding A-scans from the filtered image (Figure
3.9c). Images where reflection stripes exceeded 30% of the total number of A-scans were excluded
from analysis. A similar strategy was employed to isolate stripes of shadowing to aid in capsule
segmentation and PCT lumen selection.

104
Figure 3.9: Reflection detection. (a) Original section of B-scan with high
reflection. (b) Section of the same high reflection B-scan following
application of a horizontal blurring filter. (c) Binary mask with all white
portions representing all A-scans in 6a whose mean intensity value exceeded
15 above the mean intensity value of the corresponding A-scan in 6b. (49% of
A-scans in this example qualify as reflection stripes)
3.5.4 High Adipose Detection
The amount of adipose tissue on the surface of the kidney was widely variable between
kidneys and between regions within the same kidney. Images which contained enough adipose
tissue to interfere with segmentation were infrequent in most scan sets but when present often
contained features which were falsely identified as PCT lumen (Figure 3.10). Since the intent was
to analyze regions of the highest area of PCT lumen, in image sets where the overall area of PCT
lumen was low, falsely segmented adipose was prioritized and significantly affected results.
Figure 3.10: Cortex and adipose. (a-b) Sections of B-scans with kidney
cortex and PCT lumen. (c-d). Sections of B-scans with high degrees of
adipose and circular features which may be mistaken for PCT lumen.

105
In the majority of images where adipose interfered with segmentation, the segmentation of
the renal capsule was interrupted, triggering an error and exclusion. In a small but significant
number of images, the segmentation process finished uninterrupted but falsely identified adipose
as cortex. To detect these instances, a complex decision tree was generated with MATLAB’s
“Classification Learner App”. Two image sets were compiled containing falsely segmented high-
adipose images and correctly segmented images respectively. Features were extracted from the
images in each set. Features included variations in intensity values in what was interpreted as
cortex as well as the dimensions, orientation, eccentricity and size of what was interpreted as PCT
lumen. Training was performed with 10-fold cross validation and yielded a sensitivity of 97.5%
and a specificity of 98.6%.
3.5.5 Segmentation of the Renal Capsule-Kidney Cortex Interface
Segmentation of the interface between the renal capsule and cortex is a necessary step
preceding segmentation of the kidney cortex and PCT lumen. Defining this interface prevents
anything above it (capsule, adipose, background) from being falsely identified as cortex or PCT
lumen. In OCT scans, the renal capsule had consistently higher intensity than the cortex beneath
it. The shift in intensity provided a border which edge detection was able to identify.
The kidney was most often flush to the OCT probe during imaging and so in most B-scans
spanned the full x-axis. The capsule-cortex interface was therefore identified by targeting strong
edges which spanned the majority of the x-axis. Breaks in edge continuity by stripes of reflection
and shadowing were filled in with values from adjacent A-scans. Images similarly underwent a
horizontally weighted Gaussian blur (kernel=2.73x45.78 µm) to unify the length of the interface

106
(Figure 3.11a). A relatively weak Canny edge detection (threshold=0.22:0.66, σ=1.83) was used
to detect and remove the Tegaderm edge and all edges above it from selection (blue line Figure
3.11b). More sensitive Canny edge detection (threshold=0.13:0.28, σ=10.99) was used to identify
edges which would correspond with the capsule-cortex interface (red and yellow lines in Figure
3.11b). From the identified edges, the lowermost detected edge which spanned at least half of the
x-axis and contained higher intensity values above the edge than below (i.e. high intensity capsule
above lower intensity cortex) was selected as the capsule-cortex interface (yellow line in Figure
3.11b).
Figure 3.11: Edge detection for renal capsule. (a) Section of B-scan
following reflection and shadow stripe filling, and Gaussian blurring. (b)
Blurred B-scan section with overlay of output from weak Canny edge
detection (blue) and higher sensitivity Canny edge detection (red and yellow
lines). The yellow line indicates the selected capsule-cortex interface from the
higher sensitivity edge detection output.
3.5.6 Segmentation of Quantifiable Kidney Cortex
Segmentation of the area of quantifiable kidney cortex was a necessary step for assessing
the degree of swelling of the PCTs. Variations in capsule thickness, adipose, and OCT performance
led to widely variable penetration into the kidney cortex both between kidneys and between
different regions in the same kidney. To accurately segment the quantifiable cortex, it was

107
necessary to identify features which could help discriminate between noise and strong-signal
regions of cortex.
The z-axis depth of 1.9 mm should at no point penetrate past the renal cortex, which has
an average thickness of just less than ~14 mm [162]. The cortex is densely populated with PCTs.
If swelling is minimal, the lumen of the PCTs should be visible throughout a cross-section of the
cortex with their visibility restricted only by the limitations of the OCT system’s penetration. In
images where PCT lumen were readily visible, the volume of quantifiable cortex could be inferred
as the area immediately surrounding lumen with distinct edges, with anything beneath that point
defined as background/noise beyond the penetration of the OCT system (Figure 3.12a). However,
in images where PCT were fully swollen and their lumen fully occluded by their swollen
epithelium, there were often no visible anatomical landmarks to help distinguish strong-signal
cortex from noise (Figure 3.12b). Quantifiable cortex in these images was challenging even for
trained raters to identify.
Intensity alone was likewise not a consistent marker of quantifiable cortex as the average
intensity of the cortex varied widely between scans (Figure 3.12c, d). Similarly, the intensity
gradient marking the transition between signal and noise was widely variable between scans. Some
scans had a rapidly diminishing intensity as the penetration increased beyond where signal was
present (Figure 3.12c), while in other scans intensity was roughly homogenous between the signal
and noise (Figure 3.12d). Automating segmentation to accurately identify quantifiable cortex in
images with and without visible PCT lumen required a weighted combination of PCT lumen edge
strength, texture estimates, and intensity values.

108
Figure 3.12: Heterogeneity of cortex appearance. (a) Section of a B-scan
with visible PCT lumen. (b) Section of a B-scan with no visible PCT lumen
and no anatomical landmarks. (c) Section of a B-scan with rapidly
diminishing intensity values as the FOV moves past the OCT system’s
penetration into the cortex. (d) Section of a B-scan with little reduction in
intensity values as the FOV moves past the OCT system’s penetration into the
cortex.
Maps of lumen edge strength were generated by a local standard deviation filter passed
over the original B-scan with a contrast adjusted output (kernel=15x25 µm) (Figure 3.13b). Texture
was estimated with a second vertically weighted standard deviation filter (kernel=45x2.73 µm),
which more clearly highlighted transition from signal to noise in regions where no or little lumens
were present (Figure 3.13c). Intensity values were drawn from the original B-scan and were
weighted by variables reflecting the contrast between the capsule and superficial cortex, the
contrast between cortex and lumen, and the intensity gradient beneath the capsule-cortex interface.
In each instance, higher contrast or degree of gradient increased the weighting of the B-scan
intensity values. Weighted intensity values were combined with the map of lumen edge strength
and texture to yield a greyscale image (Figure 3.13d) from which quantifiable cortex could be
inferred by thresholding (area between yellow lines in Figure 3.13d).

109
Figure 3.13: Cortex segmentation. (a) Original section of a B-scan. (b) Map
of lumen edge strength with brighter regions corresponding to stronger lumen
edges. (c) Texture estimate generated by a vertically weighted standard
deviation filter and contrast adjustment. (d) Greyscale output of the weighted
combination of a-c. The area between the green line and bottom yellow line
represents the output of the thresholding of the image. The area between the
top yellow line (derived from the capsule-cortex interface segmentation step
(section 2.6.4) and the bottom yellow line represents the final segmented area
of quantifiable cortex.
The lumen edge strength map (1st standard deviation filter) was generated for lumen
selection and re-incorporated into cortex segmentation for computational expediency. In images
where PCT lumen were readily visible, lumen cross-sections were a good indication of
quantifiable cortex. Lumen edge strength in these images deteriorates as the A-scans move
beyond the penetrating depth of the OCT system. The contribution of this standard deviation
filter therefore supports quantifiable cortex segmentation primarily in images where lumen are
plentiful. The texture estimate (2nd standard deviation filter) utilizes a more vertically weighted
filter, which does a better job highlighting the transition from signal to noise (i.e. discriminating
between kidney cortex and background) in images where there are no lumen present.

110
3.5.7 Segmentation of Proximal Convoluted Tubule Lumen (Region of Interest Map for
Automatic Selection)
Prior to PCT lumen selection, a map of all potential PCT lumen was generated with a
combination of local adaptive thresholding and global thresholding around an empirically
determined level. The local adaptive thresholding binarized the original B-Scan tile by tile within
an approximately 70x70 µm window, with a threshold defined by the values within each tile
(Figure 3.14b). The global thresholding was performed on a contrast-enhanced version of the
original image where contrast was enhanced with MATLAB’s histeq function in a similar tiled
fashion based on the range of values in each tile (Figure 3.14c).
Figure 3.14: Lumen segmentation. (a) Contrast enhanced section from B-
scan (same section as used in Figure 3.13) following adaptive histogram
equalization. (b) Binary output of adaptive thresholding performed on original
B-scan. (c) Binary output of global thresholding performed on the contrast-
stretched image (Figure 3.13a). (d) ROI map generated after combining b and
c.
The adaptive thresholding was especially proficient in locating potential regions of interest
(ROIs) throughout the image but was indiscriminate in identifying ROIs and routinely located
them throughout regions of noise. The global thresholding was less comprehensive in its
identification of ROIs but was better able to discriminate between signal and noise (i.e. identified
high-noise regions as a single large ROI). The logical sum of the two thresholded images produced

111
a comprehensive binary mapping of ROIs with a signal to noise weighting component Figure
3.14d). ROIs outside of the segmented quantifiable cortex were removed from the ROI map.
Binarization steps were optimized empirically to produce automatic ROI segmentation which
closely mimicked the segmentation of manual raters. Denoising and smoothing steps coupled with
moderately generous thresholds for binarization may have produced over-estimation of kidney
feature size but were necessary to ensure proper segmentation (i.e. not bisecting single PCT cross-
sections or producing other artifacts).
Selection of PCT lumen was the most subjective of the manual segmentation processes and
varied considerably between raters. Manual raters were instructed to segment regions within the
quantifiable cortex which they could, with confidence, identify as cross-sections of PCT lumen.
Criteria for selection included size consistent with PCT lumen, and well-defined lumen edges such
that the selection could be reliably distinguished from imaging artifacts or noise. Raters were
instructed not to segment ROIs which could be confidently distinguished from PCTs as glomeruli
(characterized by their ~200 µm diameter and capillary tuft), blood vessels (characterized by large
diameter lumen and length relative to PCT lumens), or cysts (characterized by their >200 µm
diameter, and irregular shape). Features from manual selections were summed and employed to
define thresholds for inclusion/exclusion of automatic selections.
For selection of PCT lumen from the ROI map, a classification model was generated using
features extracted from manual segmentation. A set of features including edge-strength, diameter,
and depth beneath the capsule-cortex interface were extracted from automatic ROI selections
which coincided with PCT lumen selections made during manual analysis. These features were
similarly extracted from automatic ROI selections which manual raters did not select as PCT

112
lumen. These groups of features were assigned a “hit” or “miss” label respectively and were used
to train a fit binary classification tree using the MATLAB fitctree function. A simple decision tree,
with sensitivity and specificity comparable to more complex models, was selected to ensure
robustness of the classifier. The classification tree was able to accurately select PCT lumen from
the ROI map with a sensitivity of 85.58% and a specificity of 89.04%. The classification tree was
employed following generation of the ROI map, wherein ROIs whose features yielded a “hit” were
included in analysis and ROIs whose features yielded a “miss” were excluded.
Additional criteria were set for exclusion of false ROIs and imaging artifacts. Vertical
stripes of shadowing and areas between adjacent stripes of reflection were routinely falsely
identified as PCT lumen (Figure 3.15a). The shadow and reflection masks generated during capsule
segmentation were utilized here to remove these ROIs from selection at points where these masks
overlapped with selected ROIs (Figure 3.15b). Similarly, separation between the renal capsule and
cortex, while infrequent, created ROIs which were frequently identified as PCT lumen (Figure
3.15c). These ROIs were identified by their proximity to the capsule-cortex interface and their
horizontally elongated appearance, and were excluded from analysis (Figure 3.15d).
Figure 3.15: False regions of interest removal. (a) Section of a B-scan with
adjacent stripes of reflection (surrounding left arrow) and shadowing (right
arrow) which produce false ROIs. (b) B-scan section from 3.15a with yellow
representing the corresponding ROI map generated for this image. The
vertical red stripes represent detected stripes of reflection while the vertical

113
blue stripe represents detected stripes of shadowing. (c) Section of a B-scan
with separation between capsule and cortex. The arrow indicates pockets at
the point of separation which produce false ROIs. (d) B-scan section from
3.15c with yellow representing the corresponding ROI map. The arrow
indicates a region (red) where separation of the capsule and cortex produces
false ROIs.
3.6 Comparison of Automatic and Manual Segmentation
Automatic segmentation performed on images which were also manually segmented (~1,500
images) had a capsule-cortex interface with a mean absolute error (MAE) of 15.0 ± 10.7 µm (5.2
± 3.7 pixels) as compared to the manual segmentations (top yellow, blue and red lines in Figure
3.16b for automatic and the 2 manual raters respectively). Multiple raters performing manual
segmentation on the same images deviated by an average of 11.5 ± 5.9 µm (4.0 ± 2.0 pixels).
Automatic segmentation performed on images which were also manually segmented produced a
quantifiable cortex boundary (line across x-axis highlighting the point at which signal transitions
into noise, represented by the bottom yellow, blue and red lines in Figure 3.16b for automatic and
the 2 manual raters respectively) with a MAE of 45.0 ± 11.23 µm (4.0 ± 2.0 pixels) as compared
with manual segmentations. Multiple raters performing manual segmentation on the same images
deviated by an average of 59.0 ± 29.3 µm (20.8 ± 10.7 pixels).
Sørensen-Dice similarity coefficient scores were calculated to demonstrate the degree of
agreement (agreement between methods as to what area was segmented as quantifiable cortex and
what area was excluded; a Dice score of 0 would indicate no agreement whereas a Dice score of 1
would indicate perfect agreement) between manual and automatic selections of cortex volume
(area between the segmented capsule-cortex interface and the segmented quantifiable cortex
boundary). Automatically segmented cortex volumes compared to manually segmented cortex

114
produced a Dice score of 0.84 ± 0.05. Comparison between manual raters’ segmentations produced
a Dice score of 0.81 ± 0.06.
Figure 3.16: Manual versus automatic segmentation overlay. (a) Original
B-scan (same as used in Figure 3.5) and (b) B-scan following segmentation
automatically and by 2 manual raters. Segmentation of the capsule-cortex
interface is represented by the top yellow, red and blue lines as segmented by
the algorithm and 2 manual raters respectively. Segmentation of the
quantifiable cortex boundary is represented by the bottom yellow, red and
blue lines as segmented by the algorithm and 2 manual raters respectively.
Automatic PCT lumen selections are represented in green if they overlap with
either of the manual rater’s selections and yellow if they do not overlap with
manual segmentation. Manual PCT lumen selections are represented in cyan
if they overlap with 2nd rater’s selections and red or blue for each rater if there
is no overlap.
To assess reproducibility among manual raters, raters were reassigned 25 B-scans,
randomly selected from B-scans which they had previously segmented. MAE was calculated, for
segmentation of the capsule-cortex interface, between each rater’s two segmentations for each B-
scan, and ranged from 9 to 15 µm between raters. Dice scores were similarly calculated between

115
each rater’s two segmentations of quantifiable kidney cortex and ranged from 0.77 to 0.9, with
most raters achieving >0.8. Cohen’s kappa coefficients were calculated between PCT lumen
selections in both sets of segmented images and demonstrated fair to moderate agreement, with a
range in scores between 0.38 and 0.6. Kappa coefficients improved dramatically to a range of
scores between 0.55 to 0.72 when assessing only images with at least moderate (>5%) density
(Table 3.1).
Table 3.1: Intra-rater reproducibility and algorithm performance.
Reproducibility measurements for manual raters (left) reassigned 25 B-scans
each from their original sets. MAE, Dice coefficients, and Cohen’s kappa
coefficients are calculated for reproducibility in capsule-cortex interface,
quantifiable cortex, and PCT lumen selections respectively. Kappa scores are
also shown for only B-scans where density measurements were >5% (i.e.
there was not a low population of tubule lumen). Comparison between manual
raters’ initial segmentations of the 25 reassigned images and automatic
segmentation performed on those same images is also shown (right).
3.6.1 Measurement Extraction
3.6.1.1 Density Measurements
PCT swelling was rarely homogenous within a kidney. Swelling (as evidenced by a
reduction in visible PCT lumen size) often varied within a kidney with some PCT lumen being
fully occluded by swelling, while others had little reduction in lumen diameter. Since fully
occluded PCT lumens were not visible in the OCT image sets, measurements of PCT morphology
in these instances would be biased by only including less swollen PCT lumen. To supplement
tubular measurements with a measure which accounts for the influence of fully occluded PCT
lumen, a “density” measure was devised which calculates the total area of PCT lumen divided by
MAE Dice Kappa Kappa at >5% MAE Dice Kappa Kappa at >5%
Rater 1 10.6 0.90 0.38 0.58 13.2 0.89 0.17 0.50
Rater 2 9.2 0.85 0.47 0.72 12.6 0.83 0.23 0.65
Rater 3 12.0 0.82 0.60 0.62 13.2 0.87 0.21 0.52
Rater 4 15.2 0.77 0.38 0.55 16.4 0.79 0.13 0.35
Intra-Rater Reproducibility Performance against Automatic Segmentation

116
the total area of quantifiable cortex. This method does not neglect the swelling of PCTs whose
lumen is fully occluded, but instead provides an estimate of the ratio of the total area of PCT lumen
to quantifiable cortex for each B-scan. A high diameter measurement may, for example, be taken
together with a low density measurement suggesting a small population of dilated PCTs within a
B-scan showing mostly occluded lumen. The density measurement also provides a number value
for the criteria technicians were instructed to pursue (technicians were instructed to preferentially
image regions with a higher total area of PCT lumen).
One limitation of the 2D imaging protocol is that B-scans intersect the PCTs randomly
(horizontal red line in Figure 3.17b) and do not necessarily create cross-sections orthogonal to the
direction of the tubule (blue plane in Figure 3.17b). This creates elongated and irregularly shaped
cross-sections (red shape in Figure 3.17c) which may misrepresent the cross-sectional area of PCT
lumen (blue shape in Figure 3.17c). This impacts the density measurement, with non-orthogonal
cross-sections contributing a greater amount to the total lumen area than the corresponding true
orthogonal cross-section (red and blue shapes respectively in Figure 3.17c). To adjust for this bias,
a set of features including circularity, extent, and eccentricity were compiled for every B-scan
cross-section in the 3D scan performed on a preserved kidney (red line and red shape in Figure
3.17b and Figure 3.17c respectively). The true area of each cross-section was acquired by capturing
a plane (blue plane in Figure 3.17b) at the same location (yellow arrow in Figure 3.17b) orthogonal
to the orientation of that section (40 µm section length) of the tubule.

117
Figure 3.17: 3D lumen reconstruction with B-scan and orthogonal
sectioning. (a) En face view of automatically segmented PCT lumen in a
reconstructed 3D scan. Each tubule was extracted for comparison of B-scan
cross-section features to features of cross-sections taken orthogonal to the
orientation of the PCT at the same locations. The tubule segment highlighted
in green is represented in 3.17b. (b) The red line represents the location of the
B-scan while the blue plane represents the plane orthogonal to the orientation
of that section of the PCT lumen segment (orientation from position 20 µm
earlier in the segment to 20 µm further). The arrow indicates the point on the
tubule where the cross-sections in 3.17c are captured. This process was
repeated at every point along the length of the tubule. (c) Resulting B-scan
and orthogonal cross-sections from 3.17b are represented in red and blue
respectively.
The B-scan cross-section features were fed as inputs into MATLAB’s “Regression Learner
App” with the percent reduction in area from the B-scan cross-section to the true cross-section as
the response. A linear regression model was trained with 10-fold cross-validation to predict the
percent reduction in area required to transform an elongated or irregularly shaped cross-section
into the area of the corresponding orthogonal cross-section. The model yielded a root-mean-square
error (RMSE) of 0.15 and an R-Squared value of 0.69. The linear regression model was employed
to correct the area of elongated and irregularly shaped cross-sections to the area of the
corresponding true cross-sections. A notable limitation of this correction method, however, is that
only one kidney was used for training of the model. In addition, this kidney was preserved in a
formaldehyde solution and so may not accurately represent PCT morphology of a kidney used for
transplant. Similarly, feature evaluation of the orthogonal cross-sections revealed that these

118
sections were, on average, moderately elliptical (eccentricity of 0.67 ± 0.15); orthogonal cross-
sections contained, on average, a minor axis to major axis length ratio of 3:4. Consequently, the
linear regression model, depending on input features, may produce area estimations of non-circular
orthogonal cross-sections. While orthogonal sectioning of tubules in kidneys preserved for
transplant likely do not consistently produce perfectly circular lumen cross-sections due to
anatomical heterogeneity and storage effects, it should be considered that the formaldehyde
preservation of the kidney used in the linear regression model may have altered circularity of
tubular lumen.
3.6.1.2 Diameter Measurements
The diameter of lumen in PCT cross-sections was measured for all cross-sections in each
B-scan. As the epithelium of the PCTs swells, the visible lumen should reduce. Conversely, as the
epithelium is flattened or simplified, the visible lumen should increase. Diameter of the PCT lumen
should therefore maintain an inverse relationship to the degree of swelling, and a direct relationship
to the degree of epithelial flattening/simplification.
Diameter measurements are similarly impacted by the limitations of the 2D imaging
protocol, with elongated non-orthogonal sections (red in Figure 3.18) potentially misrepresenting
true lumen diameter. To circumvent this issue, diameter was defined as the “minor axis length”
(shortest diameter which passes through the center of the ROI). This definition ensures that the
elongated axis of tangential sections does not bias the diameter measurement, however, this may
result in under-representation of the true diameter if the imaging plane does not cut through the
tubular center axis. Consequently, an additional diameter measurement, derived from the corrected

119
area, was used. This measure calculated diameter from the linear regression corrected area using
the equation for calculating the area of a circle (𝑨 = 𝝅𝒓𝟐).
To assess accuracy, a 50 µm capillary phantom was embedded in an agar solution which
mimicked the scattering properties of kidney tissue. OCT scans were performed on the phantoms
at three locations, and ROI maps were generated by the described method. Diameter of the interior
of the capillary phantoms was calculated by the two methods described in this section and
produced diameters of 45.7±2.9 µm and 50.3±3.1µm as measured by minor axis length and from
corrected area respectively.
3.6.1.3 Inter-Lumen Measurements
The minimum distance between edges of adjacent lumen was measured between all adjacent
PCT lumen cross-sections in each B-scan (green in Figure 3.18). Adjacency of ROIs was defined
as when centroids were within 110 µm of each other (determined empirically as the maximum
distance before tubule lumen outside of immediate adjacency were included) (red circle in Figure
3.18). This inter-lumen distance was considered a measurement of the combined thickness of the
epithelium of two adjacent PCTs and any interstitial space. As the epithelium swells, the inter-
lumen distance should increase. Conversely, as the epithelium is flattened or simplified, the inter-
lumen distance should reduce.

120
Figure 3.18: Depiction of methodology for inter-lumen and inter-centroid
measurements. The red circle represents a 110 µm radius around the center
ROI of “adjacent” ROIs. Distances between lumen edges and centroids are
represented in green and blue respectively.
3.6.1.4 Inter-Centroid Measurements
The distance between centroids of adjacent PCT lumen was similarly measured between
all adjacent PCT lumen cross-sections in each B-scan (blue in Figure 3.18). This was considered a
measurement of the combined lumen, epithelium, and interstitial space. The inter-centroid distance
may be mostly unaffected by PCT swelling and epithelial flattening as changes to epithelial
thickness and lumen diameter are inversely related and may balance. The inter-centroid distance
may therefor reflect changes to the interstitial space.
3.6.2 B-Scan Selection and Measurement Compilation
Measurements were compiled for each B-scan in each image set. As the 2D imaging
protocol produced numerous duplicate or redundant images, only one B-scan was selected from
each image set for analysis. As imaging protocol was to survey regions with the greatest area of
visible tubule lumen (i.e. highest PCT lumen density), B-scan results were sorted by density and
the maximum density B-scan was selected for inclusion in results. Measurements from these
selected B-scans were averaged to yield values for pre-implantation and post-reperfusion scans for
each kidney. Results were averaged for each recovery group in each transplant group and
represented in box and whisker plots.

121
In addition to analysis of correlation between measurements from selected B-scans and
binary recovery group categories (IGF/DGF), the relationship between measurements and
decline in patient’s serum creatinine levels (which should decline rapidly and to a level <3.0
mg/dL if a transplanted kidney is well functioning) following transplant was investigated [163].
Linear mixed effects models were fitted to regress the longitudinal measures of serum creatinine
from day 0 to day 5 on each patient to account for the within-subject variation by assuming an
first order auto-regressive structure with homogenous variances covariance structure and
allowing for random intercepts for between-subject variation. The baseline creatinine measure,
time, and interactions between time and each measurement were also included in the models.
Models were fitted following our initial hypotheses that flattened PCT epithelium and dilated
lumen would represent pathology, and consequently higher inter-lumen distance measurements,
lower diameter measurements, and lower density measurements (which we initially predicted
would echo diameter measurement trends) would correlate with a faster recovery (steeper decline
in creatinine). Higher inter-centroid distances were hypothesized to represent pathology (as
indicative of interstitial inflammation), and consequently lower inter-centroid distances would
correlate with a faster recovery (steeper decline in serum creatinine).
3.7 Summary
One complication with OCT analysis of human kidneys is the very high number of
images captured that need to be analyzed; pathologists could be presented with potentially
thousands of images for pre-implantation and post-reperfusion analysis. Filtering through these
sets is not only time consuming, but introduces a point where considerable variability or bias
between raters and pathologists may be introduced. For OCT to be used effectively in a clinical

122
setting, image analysis must be conducted quickly, reliably, and without bias. Automated
segmentation achieves these goals and can provide rapid and accurate assessments of the kidney
[164], [165]. Automated selection and analysis of images ensures both reproducibility and speed.
The reproducibility of automated analysis should promote confidence in the measurements
derived from OCT. The speed of automated analysis, coupled with the real-time imaging speed
(relative to the several hours required to prepare biopsy histology), should position OCT as
entirely practical in an OR setting.
The benefits of automated segmentation in assessing transplant kidneys have already
been explored in the context of renal biopsy analysis. Wide variability between pathologists in
interpreting and scoring kidney biopsies has led to the introduction of numerous automated and
semi-automated systems for quantifying histology [166]–[168]. These systems ensure
reproducibility and have the added benefit of high speed analysis. These benefits are of particular
value at points when a decision to accept or reject a kidney is pressing, and when the only
pathologists on call are not expertly trained. Biopsy histology, however, appears vastly different
from the anatomy present in OCT imagery. The majority of automated systems for quantification
of biopsy histology rely on color features and other markers not present in OCT, leaving these
methods unsuitable for application to OCT imaging of the kidney. The majority of research in
automated segmentation of OCT imaging is focused on segmentation of features in the eye,
namely segmentation of the retinal layers [169],[170]. These algorithms target vastly different
anatomy than is seen in the kidney cortex and encounter different image processing hurdles due
to vastly different imaging protocols, and so are similarly unsuitable for segmentation of OCT
kidney imagery.

123
The segmentation algorithm proposed in this chapter is uniquely designed to segment
kidney features captured by OCT. This algorithm was designed to provide accurate, and high
speed segmentation and measurement of kidney microanatomy in a fully automated fashion. The
reproducibility, speed, and accuracy of the proposed algorithm have facilitated the analysis of
vast amounts of OCT imaging of human kidneys for the purpose of research.

124
CHAPTER 4: CLINICAL RESULTS
4.1 Introduction
We open this chapter with an overview of the categorization schema used for partitioning
a heterogeneous patient population into smaller groups. We then investigate, in each sub-
grouping of patient populations, the correlation between measurements derived from OCT
imaging of donor kidneys with the recovery of the respective recipients. Next, we evaluate
redundancy of measurements, and isolate the measures most predictive of recovery within each
patient grouping. We conclude this chapter with a brief discussion on the specific pathology that
may be represented by the described measurement trends.
4.2 Evaluating Donors
4.2.1 Live and Deceased Donor Kidney Transplantation
The majority of kidneys transplanted in the United States are from deceased donors. The
advantages of living donor kidney transplants (LDKTs) over deceased donor kidney transplants
(DDKTs) are well known. Recipients who receive a kidney from living donors will recover
faster and their kidney grafts will survive roughly twice as long. This is due to a variety of
factors. Major contributors to this disparity are the improved health of living donors over
deceased donors (prior to death), and the reduced ischemic period of LDKTs. While many
DDKTs are procured from otherwise healthy donors who suffered premature death, many are
procured from elderly donors or donors with various comorbidities which contributed to the

125
cause of death and may impact kidney viability. Similarly, LDKTs are generally scheduled far in
advance, which affords transplant surgeons the opportunity to optimize transplant conditions.
Most LDKTs are performed with donor and recipient in adjacent rooms, meaning ischemic time
incurred between procurement and transplant into the recipient is greatly reduced (approximately
1 hour for LDKTs versus up to 30 hours for DDKTs) [171]–[173].
4.2.2 Static Cold Storage and Hypothermic Machine Perfusion in Kidney Transplantation
Reducing the temperature of storage for kidneys during ischemic time slows enzymatic
degradation and depletion of metabolic stores [174]. The Van Hoff rule dictates that the majority
of cellular enzymes respond to a 10-degree Celsius drop in temperature with a 2-fold drop in
activity [175]. A kidney exposed to warm ischemia shows some detriment in function after only
a 5-minute interval, and is damaged to the point where it becomes unviable after approximately
60 minutes [176]. Simply lowering the storage temperature to 4-degrees Celsius, even without
preservation solution, limits PCT metabolic activity to 10-12% its normal physiologic activity
and increases the time the kidney can remain viable to 12 or 13 hours [43]. Static cold storage
(SCS) of donor kidneys, however, utilizes preservation solutions which prolong viability of SCS
kidneys significantly.
While hypothermic storage drastically reduces the rate of energy consumption and
enzymatic degradation, these processes still continue at a slowed pace; ATP and ADP reserves
continue to become depleted at a rate which exceeds their ischemically stunted production.
Ischemic damage therefore remains, even under hypothermic conditions, a duration-dependent
condition. Unavoidable logistics like tissue matching and transport mean that the cold ischemic

126
time can extend for long periods of time. The United Network of Organ Sharing (UNOS) registry
cite an average hypothermic storage time of 21 hours. The US Renal Data System Registry
suggests that each 6 hours of cold ischemia correspond with a 23% increase in risk of DGF
following transplant, although some labs suggest a more moderate 8% increase in DGF for every
6 hours of cold ischemia [43], [177]. Thus the duration of hypothermic storage and cold ischemia
is widely considered the greatest contributor to injury upon reperfusion (IRI) and subsequent
DGF [176]. In contrast to this trend, Xia et al. found no significant difference in survival time of
kidneys or their inclination towards DGF and a period of prolonged cold ischemia. This study
had a small sampling size however and a direct link between cold ischemic time and incidence of
DGF and subsequent reduction in survival does seem to be the consensus [178].
Enzymes respond heterogeneously to changes in temperature. Hypothermic preservation
maintains a temperature between 0 and 10 degrees, generally 4 degrees Celsius. In this
temperature range, Na/K/ATPase activity is almost non-existent (at 5 degrees Celsius,
Na/K/ATPase operates at 1% of its normothermic capacity). Hypothermic conditions therefor
induce similar effects as hypoxia on the Na/K/ATPase and maintenance of the sodium
electrochemical gradient. Similarly, by the time hypothermic storage is implemented, enough
warm ischemia has likely occurred to deplete the kidney cortex’s oxygen reserves and shift the
PCTs to an anaerobic metabolic state.
Respiration requires the translocation of adenine nucleotides across the mitochondrial
membrane by the adenine-nucleotide-translocator. While synthesis of adenine nucleotides
continues under hypothermic conditions, the translocating enzyme ceases function. Similarly,
transport of NADH across the mitochondrial membrane through the malate-aspartate shuttle is

127
debilitated by a cold-induced reduction in enzyme function. Hypothermic paralysis of these
transporters therefor further stunts energy production [38], [179]. The lack of energy driving the
Na/K/ATPase and the cold’s paralyzing effects result in a failure to efflux sodium from the cell;
as the gradient is disrupted and sodium continues to diffuse down its electrochemical gradient
into the cell, sodium accumulates intracellularly and water follows osmotically resulting in cell
swelling [179], [180].
Hypothermic preservation also serves to destabilize the PCT cell membrane. Reduction in
temperature drives the phospholipids of the cell membrane from a liquid crystalline state to a
highly ordered hexagonal lattice. This phase change increases the activation energy of
membrane-bound enzymes, dramatically reducing their efficiency [181]. The altered structure
and enzymatic function of the membrane alter the cell’s permeability and ionic composition
respectively, leaving the cell less able to extrude sodium and more susceptible to its intrusion.
Hypothermic conditions also slow the cell’s defenses against free radicals to a greater
extent than they slow the reactions which produce those free radicals. This discrepancy leads to
an accumulation of free radicals within the cell. These highly reactive species react with
membrane lipids, further disturbing the integrity of the membrane and contributing to membrane
permeability [182].
Continuous hypothermic machine perfusion (HMP) was shown in the late 60’s by Belzer
et al. to preserve the viability of an ex vivo dog kidney for up to 72 hours [183]. Today,
continuous hypothermic storage occurs either with use of the LifePort Organ Recovery System
(ORS) or the Waters Medical System (WMS). Multiple studies have demonstrated the ability of

128
these systems to reduce the degree of IRI as evidenced by reduced instances of DGF given the
same duration of cold ischemia as static cold storage grafts [184], [185]. The required
equipment, facilities, trained personnel and cost have limited this potentially superior method of
preservation to cases with higher risk/extended criteria kidneys.
HMP is typically performed at a higher temperature than in static cold perfusion. At 10
degrees Celsius, it is believed that ATP generation and Na/K/ATPase efficiency, while reduced,
are sufficient to maintain ionic gradients and support cell viability and cell volume to some
degree if provided the necessary substrates. As opposed to SCS, HMP generally uses
“extracellular” preservation solution which bears more similarity to plasma than the intracellular
environment. Oxygen and metabolic substrates are perfused through the kidney at a steady low
pressure (between 40 and 60 mmHg) or in a pulsatile fashion. While some groups maintain an
advantage in pulsatile over steady flow, others suggest the two modes of perfusion share no
significant difference in outcome. Similarly, certain groups promote a higher rate of flow during
pulsatile perfusion [183][186]. Oxygen administration during HMP is similarly debated: some
claim introduction of oxygen into the perfusate, either by oxygenation or by passive equilibration
with the air, as instrumental in maintenance of compromised kidneys, while others maintain that
its’ inclusion in protocol has no bearing on outcome or viability of the allograft [183].
In theory, the delivered substrates should be steadily converted to ATP by metabolic
mechanisms which are less inhibited by the higher storage temperatures. This ATP should in turn
power the Na/K/ATPase which is again less inhibited by the higher storage temperatures,
actively extruding sodium from the cell and maintaining proper cell volume of the PCTs. The
higher ATP supply and lower intracellular sodium concentrations should help to sustain lower

129
intracellular calcium levels by active extrusion and extrusion by the sodium-calcium antiporter
respectively.
In addition to delivery of substrates and oxygen, this system has the added benefit of
clearance of metabolic waste products. Clearance of metabolic waste by the active flow of the
perfusate should prevent accumulation of reactive oxygen species and acidic components within
the cell. HMP therefore should act to maintain low intracellular calcium concentrations, a stable
pH, clearance of ROS [187].
Recent studies have also focused on continuous perfusion performed at normothermic
and sub-normothermic temperatures. Perfusion at temperatures between 25 and 37 degrees
Celsius have been shown to maintain graft viability. Normothermic and sub-normothermic
preservation strategies have the potential advantages of maintaining near-physiologic metabolic
function. Under a healthy metabolic state these kidneys could retain most functional and
structural characteristics and would avoid the damaging effects of IRI [145]. In the porcine
model, Kerkhove et al. successfully maintained organ viability for over 24 hours at sub-
normothermic temperatures-although the 15 degree Celsius model was more successful than the
21 and 28 degree preservation strategies [188].
4.2.3 Standard and Expanded Criteria Donors in Kidney Transplantation
In 2002 the term extended/expanded criteria donors (ECD) was introduced to identify
higher risk kidneys (use of “extended” and “expanded” varies between publications). These more
marginal ECD kidneys generally perform more poorly and have a shorter period of allograft
survival than kidneys procured from standard donors. As such, they are reserved for recipients

130
where the reduced performance and shorter graft life would still culminate in a better quality of
life and improved prognosis over the alternative: remaining on dialysis and waiting for a more
ideal offer. This term was initially derived from a binary scoring system which identified all
donors 60 or older, and all donors between 50 and 59 who satisfied at least two other criteria
associated with poor kidney function as ECD. These criteria included a history of hypertension, a
cerebrovascular accident as the cause of death, and a serum creatinine of greater than 1.5 mg/dL.
Kidneys which satisfied either of these two definitions were considered to hold a 70% greater
change of allograft failure than kidneys procured from standard criteria donors (SCD). Both age
and these additional criteria were considered markers of reduced nephron mass, or a reduction in
the number of functional units of the kidney [189].
Age alone is not a reliable indicator of kidney function and viability. The effect of age on
the kidney can be heterogeneous. This is one shortcoming of the 2002 binary ECD scoring
system; kidneys from donors 60 or older may in some instances outperform kidneys from
younger donors and evidence of this is discounted with the 60 year ECD cutoff [190]. The
inclusion of additional factors in the evaluation criteria can help identify these instances. Since
the 2002 introduction of the binary ECD/SCD scoring, various groups have put forward more
comprehensive methodologies for assessing donor characteristics. Following a study of nearly
35,000 deceased donor transplants conducted over a 5 year period, Nyberg et al. introduced a
system which considered donor age, history of hypertension, creatinine clearance, cause of death,
and number of HLA-mismatches (human leukocyte antigen matching to determine suitable
donor-recipient pairings). Resulting scores ranged from 0-39 with scores above 20 indicating

131
ECD [191], [192]. Schold et al. added CMV serology (to determine cytomegalovirus infection),
donor ethnicity and cold ischemia as donor variables, and assigned a score from 1 to 4 [193].
In 2009, Rao et al. introduced a system of kidney donor assessment which encompassed
10 donor characteristics. A regression model was constructed which traced and quantified the
association between a litany of donor characteristics and duration of graft survival. Training data
for this model drew from just under 70,000 transplants conducted between 1995 and 2005 and
included only first-time recipients and only deceased donor single-kidney transplants. Donor
characteristics which demonstrated no significant link to graft survival were discarded from the
model (e.g. gender, history of smoking). The ten remaining features included were age, height,
weight, ethnicity,, history of hypertension or diabetes, cause of death, serum creatinine, hepatitis
C and donation after cardiac death. Age was the most heavily weighted feature of the model with
each year after 50 increasing the predicted risk of graft failure by 1%. The output from this
model, titled the kidney donor risk index (KDRI), was a score from 0 to 100 representing the risk
of graft failure in an average adult recipient. A low KDRI would indicate a low risk of graft
failure while a higher KDRI would indicate a higher probability of graft failure.
In December of 2014, the Organ Procurement and Transplantation Network (OPTN)
implemented a new kidney allocation system (KAS) with the intent of optimizing use of the
donor pool and increasing consideration and use of less ideal but still viable kidneys. In addition
to adjusting the system of triage for ordering the transplant list, the KAS introduced a
standardized system for assessing kidney donors and scoring donor characteristics. The kidney
donor profile index (KDPI) was proposed as the standard for quantifying and interpreting donor
features in their relation to kidney viability. The limitations of previous methods of scoring

132
donor factors were believe to lead to greater aversion by transplant surgeons, and ultimately to a
greater number of unnecessary discards. The KDPI was introduced as a more comprehensive
scoring system that had greater correlation with graft outcome. The KDPI was intended to reduce
discards by offering surgeons a more detailed look not just at the quality of donor, but of the
quality of the donor in relation to the rest of the donor pool.
The KDPI is a derivation of Rao et al.’s KDRI. KDPI is similarly a scoring from 0 to 100
but rather than a risk of graft failure it reflects a mapping of the KDRI for that kidney against all
cadaver donor kidneys procured the previous year. In essence, the KDPI is a predictive ordering
of the donor pool from least to most likely to experience graft failure. A KDPI of 85%, for
example, would indicate that the kidney is associated with a KDRI higher than 85% of recovered
kidneys from the year prior. A higher KDPI therefor reflects not a direct high risk of graft failure
but rather a high risk of graft failure relative to the composition of the donor pool. Conversely, a
low KDPI suggests that a kidney is less likely than most of the donor pool to experience graft
failure. Under the KAS system, a donor with a KDPI of 85% or greater was considered as ECD,
while a donor with a KDPI of less than 85% was considered SCD.
4.2.4 Immediate and Delayed Graft Function in Kidney Transplant Recovery
The increasing use of higher risk, more ischemically damaged kidneys to combat the
daunting waiting list has led to an increase in incidence of poor graft function and graft failure.
While more kidneys are being transplanted overall, a higher percentage of kidneys transplanted
are compromised. In spite of advancements in treatment, the number of recipients experiencing
poor graft function has risen approximately 20% every decade since 1985. This rise in

133
complications has grown in parallel with increased usage of ECD kidneys, with up to 50% of
kidneys from ECD donors experiencing delayed graft function (DGF) as compared to 4-10%
incidence of DGF in kidneys procured from live donors [194]–[196].
DGF is diagnosed clinically when a patient is required to undergo dialysis following
transplant (either prior to discharge or within 1 week following transplant). Half of those
diagnosed with DGF will begin to see a return in kidney function 10 days following transplant, a
third will see function begin to return 10-20 days following transplant, 10-15% do not see
function until after 20 days following transplant and 2-15% will experience primary non-function
or chronic graft dysfunction [1]. Speed of recovery is considered an indication of the expected
time of graft survival; a quick return to normal function following transplant is generally
associated with a longer lifetime of the transplanted kidney whereas a prolonged recovery period
generally corresponds with a shorter lifetime of the transplant [196]. Patients diagnosed with
DGF demonstrate a significantly higher incidence of acute rejection, a 40% reduction in lifetime
of the transplant and a 5-year graft survival rate of only 34% [197]. Following expiration of the
graft or rejection, these patients are returned to the kidney transplant waiting list if they remain
healthy enough for an additional transplant.
4.3 Patient Demographics
This study was approved by the Georgetown University and the University of Maryland
Institutional Review Boards (Study number: IRB#2010-396). Written informed consent was
obtained prior to enrollment. Patients eligible for this study included any kidney transplant
recipient 18 years or older at the MedStar Georgetown Transplant Institute.

134
Patient demographics were obtained at the time of consent. The patient pool was composed
of approximately 60% male and 40% female recipients. Mean age at transplant was 52 ± 12.5
years. Mean BMI of recipients was 28.4 ± 4.7. 61% of patients in this study were African
American, 24% were Caucasian, 8% were Hispanic, and 7% were Asian.
Of the 169 kidneys imaged and included in this study, 66 were from LDKTs and 103 were
from DDKTs. All LDKTs were preserved by SCS. Of the 103 DDKTs, 88 were preserved by SCS
and 15 were preserved by HMP. 4 of the kidneys in the SCS group were part of a multi-organ
transplant (kidney/pancreas). Of the 88 DDKT-SCS kidneys, 26 had a KDPI of 85 or more and
were subcategorized as ECD kidneys. The remaining 62 SCS kidneys were subcategorized as SCD
kidneys [3]. Of the 15 kidneys in the HMP group, 2 kidneys qualified as ECD, and the remaining
13 were subcategorized as SCD kidneys (Figure 4.1). Patients whose data were excluded from the
analysis included those involved in parallel studies for anti-DGF clinical trials (1 patient) and those
where image quality of the OCT image sets was compromised (2 patients).
Graft function following transplant was categorized as either immediate or delayed. DGF
was designated when a transplant recipient was required to undergo dialysis within the first
seven days following transplant [198] or when otherwise specified as DGF in clinical notes. All
cases where transplant recipients did not require dialysis prior to discharge were considered IGF.
Recovery groupings for each transplant group were as follows: LDKT (65 IGF, 1 DGF), SCS
SCD (51 IGF, 11 DGF), SCS ECD (18 IGF, 8 DGF), HMP SCD (8 IGF, 5 DGF), and HMP
ECD (1 IGF, 1 DGF) (Figure 4.1).

135
Figure 4.1: Hierarchy classification of transplant groups. All transplants
(blue tier 1) divided into live and deceased donor kidney transplants (blue tier
2). DDKTs are further divided into subgroups based on storage method (blue
tier 3). DDKTs stored by SCS and HMP are further divided into subgroups
based on risk of graft failure (blue tier 4). Each end-tier transplant group is
divided into recovery groups based on requirement of dialysis (green and red).
4.4 Density by Area Results
4.4.1 Density by Area Results Stratified by Transplant Group (IGF and DGF Combined)
Distinctions between measurements from the ECD subgroup of DDKT kidneys stored by
HMP and other transplant groups were not investigated due to limited sampling of ECD kidneys
in the DDKT-HMP group (n=2).
To correct for multiple comparisons between transplant groups, p-values from Student’s t-
tests are supplemented with p-values after adjustment with false discovery rate (FDR). Multiple
comparison correction was performed in R (programming language) with the p.adjust() command
using the FDR method for measurements across transplant groups (i.e., LDKT, DDKT-SCS SCD,
DDKT-SCS ECD, and DDKT-HMP SCD measurements).

136
Prior to implantation (left in Figure 4.2), kidneys from the LDKT transplant group
demonstrated higher (p<0.001, FDR adjusted p-value<0.001) PCT lumen density than DDKT
kidneys stored by SCS. This difference may be considered a consequence of the markedly different
transplant conditions, namely a considerably reduced ischemic time (mean of 1.47 ± 0.61 hours
for LDKT versus 13.49 ± 7.06 hours for DDKT-SCS SCD and ECD subgroups). The SCD
subgroup of DDKT kidneys stored by HMP had a higher (p<0.001, FDR adjusted p-value<0.001)
pre-implantation density than all other transplant groups. The high HMP density may be a result
of artificial dilation of the PCT lumen by the machine-perfusion process. The LDKT group, and
the DDKT-SCS SCD and ECD subgroups all experienced an increase in density between pre-
implantation and post-reperfusion scans. This is consistent with prior studies demonstrating a
dramatic reduction in swelling of ischemic PCTs (which would present as an increase to total
lumen area) following reperfusion [199], [200]. In contrast to all other groups, the HMP group
experienced a reduction in density following reperfusion, suggesting either some dissipation of the
artificial dilation or induction of swelling. Post-reperfusion density (right in Figure 4.2) was similar
between LDKT and the DDKT-SCS SCD and ECD subgroups. Post-reperfusion density in the
HMP group remained higher (p<0.05, FDR adjusted p-value=0.078 when compared to SCS-ECD
and FDR adjusted p-value =0.1136 when compared to SCS-SCD) than in both DDKT-SCS
subgroups, and moderately higher than in the LDKT transplant group (p=0.09, FDR adjusted p-
value=0.25). The high post-reperfusion density suggests some persistence of the effects of the
artificial dilation.

137
Figure 4.2: Box and whisker plots of density measurements. Density
measurements (represented in lumen percentage of cortex, i.e., density
ratioE02) calculated with original lumen area (a) and with lumen area
corrected by linear regression (b) for pre-implantation (left) and post--
reperfusion (right) scans for the LDKT group, and the DDKT subgroups: SCD
kidneys stored by SCS, ECD kidneys stored by SCS, and SCD kidneys stored
by HMP. Each transplant group is further divided into recovery groups which
experienced either IGF (green) or DGF (red) following transplant. Mean
density values for each recovery group are included in the attached table with
p-values (from Student’s t-test), and values adjusted for false discovery rate
(FDR) between transplant groups, representing significance of difference
between recovery groups for each transplant group. The mean percent change
(increase or decrease) to density following reperfusion is included at the
bottom of each table for both recovery groups in each transplant group.

138
4.4.2 Density by Area Results Stratified by Recovery Group (IGF vs. DGF)
Distinctions between IGF and DGF recovery group measurements in the LDKT transplant
group were not investigated due to limited sampling of DGF kidneys (n=1). Similarly, distinctions
between IGF and DGF recovery group measurements in the ECD subgroup of DDKT kidneys
stored by HMP were not investigated due to limited sampling (n=1 for IGF, n=1 for DGF).
In all transplant groups, density values were similar between IGF and DGF recovery groups
(green and red respectively in Figure 4.2) prior to implantation. Following transplant and
reperfusion, density measurements for the DDKT kidneys stored by SCS increased in both SCD
and ECD subgroups for both IGF and DGF recovery groups. In the HMP group, the IGF recovery
group experienced a <1% change in density while the DGF recovery group experienced a 23%
reduction in density following reperfusion. In the SCD subgroup of DDKT kidneys stored by SCS,
post-reperfusion density was similar between IGF and DGF recovery groups. In the ECD
subgroup, however, post-reperfusion density in the IGF recovery group was lower (p<0.05, FDR
adjusted p-value=0.03) than that of the DGF group. Conversely, in the HMP group, post-
reperfusion density in the IGF recovery group was higher (p=0.28, FDR adjusted p-value=0.30 for
original density, and p<0.05, FDR adjusted p-value=0.06 for corrected) than in the DGF recovery
group.
4.4.3 Density Results by Association with Post-Transplant Creatinine Decline
Following our initial hypothesis that lower PCT lumen density would correlate with a faster
recovery following transplant (i.e. density is positively correlated with creatinine values and lower
density is correlated with a steeper decline in creatinine (i.e., has a negative interaction effect with

139
time), linear mixed effect models were fitted for each DDKT transplant group. The pre-
implantation fitted model for the SCS-SCD group did not support the hypothesis (p=0.89),
however the post-reperfusion SCS-SCD model trended towards support of the hypothesis
(p=0.09). Both pre-implantation and post-reperfusion fitted models for the SCS-ECD group
similarly did not support the hypothesis (p=0.74, and p=0.15 respectively). Finally, the pre-
implantation model for the HMP-SCD group did support the hypothesis (p<0.01), as did the post-
reperfusion model (p<0.001).
4.5 Diameter Results
4.5.1 Diameter Results Stratified by Transplant Group (IGF and DGF Combined)
Diameter measurements were relatively consistent between minor axis length and
corrected area methods of measurement. Diameter calculated from corrected area was, however,
moderately but consistently higher than diameter calculated as the minor axis length. This effect
is likely due to the linear regression model’s predictions of instances of moderately elliptical
orthogonal cross-sections, which the minor axis length would underestimate.
Prior to implantation (left in Figure 4.3), kidneys from the LDKT transplant group
demonstrated moderately higher PCT lumen diameter than DDKT kidneys stored by SCS. DDKT
kidneys stored by HMP had higher (p<0.001, FDR adjusted p-value<0.005) pre-implantation
diameter than all other transplant groups. All groups experienced an increase in diameter between
pre-implantation and post-reperfusion scans. The LDKT and DDKT-HMP groups both
experienced a modest 5% increase, while DDKT-SCS SCD and ECD subgroups both experienced
a larger increase in diameter (18%, and 13% respectively). Post-reperfusion diameter (right in

140
Figure 4.3) was similar between the LDKT transplant group and the ECD subgroup of DDKT
kidneys stored by SCS. Post-reperfusion diameter in the SCD subgroup of DDKT kidneys stored
by SCS was moderately higher (p=0.08, FDR adjusted p-value=0.10) than in the ECD subgroup
and the LDKT transplant group (p<0.05, FDR adjusted p-value=0.06). Post-reperfusion diameter
in the HMP group was higher than in all other groups (p<0.005/FDR adjusted p-value<0.005,
p<0.05/FDR adjusted p-value=0.06, p<0.005/FDR adjusted p-value<0.005 for LDKT, DDKT-
SCD, and DDKT-ECD respectively).

141
Figure 4.3: Box and whisker plots of diameter measurements. Measurements
calculated by minor axis length (a) and from lumen area corrected by linear regression (b)
for pre-implantation (left) and post-reperfusion (right) scans for the LDKT group, and the
DDKT subgroups: SCD kidneys stored by SCS, ECD kidneys stored by SCS, and SCD
kidneys stored by HMP. Each transplant group is further divided into recovery groups
which experienced either IGF (green) or DGF (red) following transplant. Mean diameter
values for each recovery group are included in the attached table with p-values (from
Student’s t-test) and values adjusted for FDR between transplant groups, representing
significance of difference between recovery groups for each transplant group. The mean
percent change (increase or decrease) to diameter following reperfusion is included at the
bottom of each table for both recovery groups in each transplant group.

142
4.5.2 Diameter Results Stratified by Recovery Group (IGF vs. DGF)
In the SCD subgroup of DDKT kidneys stored by SCS, diameter measurements were
similar between IGF and DGF recovery groups (green and red respectively in Figure 4.3) prior to
implantation. In the ECD subgroup of DDKT kidneys stored by SCS, pre-implantation diameter
measurements were lower (p<0.05, FDR adjusted p-value=0.06) in the IGF than in the DGF
recovery group. In the SCD subgroup of DDKT kidneys stored by HMP, pre-implantation diameter
measurements were similar between IGF and DGF recovery groups. Following reperfusion,
diameter measurements for all recovery groups in all transplant groups increased. Within the SCD
subgroup of DDKT kidneys stored by SCS and the HMP group, increases were similar between
IGF and DGF recovery groups. In the ECD subgroup, diameter of the IGF recovery group
increased 10% while diameter in the DGF group increased 17%. Post-reperfusion diameter in the
SCD subgroup of kidneys stored by SCS was similar between IGF and DGF recovery groups.
Within the ECD subgroup, diameter in the IGF recovery group remained lower (p<0.005, FDR
adjusted p-value<0.005) than in the DGF group. In the HMP transplant group, IGF diameter was
moderately lower than in the DGF group (p=0.34).
4.5.3 Diameter Results by Association with Post-Transplant Creatinine Decline
Following our initial hypothesis that lower PCT lumen diameter would correlate with a faster
recovery following transplant (i.e. diameter is positively correlated with creatinine values and
lower diameter is correlated with a steeper decline in creatinine (i.e., has a negative interaction
effect with time)), linear mixed effect models were fitted for each DDKT transplant group. The
pre-implantation fitted model for the SCS-SCD group did not support the hypothesis (p=0.54),

143
however the post-reperfusion SCS-SCD model did support the hypothesis (p<0.05). The pre-
implantation fitted model for the SCS-ECD group similarly did not support the hypothesis
(p=0.96), and the post-reperfusion SCS-ECD model did support the hypothesis (p<0.05). Finally,
the pre-implantation model for the HMP-SCD group did support the hypothesis (p<0.05), while
the post-reperfusion model did not (p=0.56).
4.6 Inter-Centroid Results
4.6.1 Inter-Centroid Results Stratified by Transplant Group (IGF and DGF Combined)
Prior to implantation (left in Figure 4.4), kidneys from the LDKT transplant group and
DDKT kidneys stored by SCS (both SCD and ECD) all exhibited a similar inter-centroid distance.
DDKT kidneys stored by HMP had a higher (p<0.05, FDR adjusted p-value<0.05) pre-
implantation inter-centroid distance than all other transplant groups. All groups experienced a
modest 1-4% increase in inter-centroid distance between pre-implantation and post-reperfusion
scans. Post-reperfusion (right in Figure 4.4) inter-centroid distance in the LDKT transplant group,
and DDKT-SCS subgroups was similar. Post-reperfusion inter-centroid distance in the HMP group
remained higher (p<0.005, FDR adjusted p-value=0.06) than the LDKT group and moderately
higher than the DDKT-SCS SCD and ECD subgroups (p=0.09/FDR adjusted p-value=0.14, and
p<0.05/FDR adjusted p-value=0.08 respectively).

144
Figure 4.4: Box and whisker plots of inter-centroid measurements.
Measurements for pre-implantation (left) and post-reperfusion (right) scans
for the LDKT group, and the DDKT subgroups: SCD kidneys stored by SCS,
ECD kidneys stored by SCS, and SCD kidneys stored by HMP. Each
transplant group is further divided into recovery groups which experienced
either IGF (green) or DGF (red) following transplant. Mean inter-centroid
distance values for each recovery group are included in the attached table with
p-values (from Student’s t-test) and values adjusted for FDR between
transplant groups, representing significance of difference between recovery
groups for each transplant group. The mean percent change (increase or
decrease) to inter-centroid distance following reperfusion is included at the
bottom of each table for both recovery groups in each transplant group.
4.6.2 Inter-Centroid Results Stratified by Recovery Group (IGF vs. DGF)
Prior to implantation, inter-centroid distance was similar between the IGF and DGF
recovery groups in all transplant groups. Following reperfusion, inter-centroid distances increased
in all transplant groups for both IGF and DGF recovery groups. In the SCD subgroup of DDKT
kidneys stored by SCS, IGF and DGF recovery groups (green and red respectively in Figure 4.4)
experienced a similar increase following reperfusion. In the ECD subgroup of DDKT kidneys
stored by SCS, and in the SCS subgroup of DDKT kidneys stored by HMP, the IGF recovery

145
groups experienced a smaller increase in inter-centroid distance following reperfusion than the
DGF groups. In the SCD subgroup of DDKT kidneys stored by SCS, post-reperfusion inter-
centroid distance measurements were similar between IGF and DGF groups. In the ECD subgroup,
inter-centroid distance was moderately lower (p=0.09) in the IGF recovery group than in the DGF
group. Post-reperfusion inter-centroid distance for the HMP group was lower (p<0.05) in the IGF
recovery group than in the DGF group.
4.6.3 Inter-Centroid Results by Association with Post-Transplant Creatinine Decline
Following our hypothesis that lower inter-centroid distance would correlate with a faster
recovery following transplant (i.e. inter-centroid distance is positively correlated with creatinine
values and lower inter-centroid distance is correlated with a steeper decline in creatinine (i.e., has
a negative interaction effect with time)), linear mixed effect models were fitted for each DDKT
transplant group. Both the pre-implantation and post-reperfusion fitted models for the SCS-SCD
group did not support the hypothesis (p=0.14, and p=0.17 respectively). Both the pre-implantation
and post-reperfusion fitted models for the SCS-ECD group did not support the hypothesis (p=0.28,
and p=0.72 respectively). Finally, the pre-implantation model for the HMP-SCD group did not
support the hypothesis (p=0.37), however the post-implantation model trended towards moderate
support of the hypothesis (p=0.07).
4.7 Inter-Lumen Results
4.7.1 Inter-Lumen Results Stratified by Transplant Group (IGF and DGF Combined)
Prior to implantation (left in Figure 4.5), the LDKT group exhibited larger (p<0.05, FDR
adjusted p-value=0.05) inter-lumen distance than the SCD and ECD subgroups of DDKT kidneys

146
stored by SCS. The SCD subgroup of DDKT kidneys stored by HMP exhibited an inter-lumen
distance similar to the LDKT group. Following reperfusion, inter-lumen distance decreased
slightly in the LDKT transplant group, the SCD subgroup of DDKT kidneys stored by SCS, and
the SCD subgroup of DDKT kidneys stored by HMP. In the ECD subgroup of DDKT kidneys
stored by SCS, inter-lumen distance increased slightly following reperfusion. Post-reperfusion
(right in Figure 4.5) inter-lumen distance was higher (p<0.05, FDR adjusted p-value =<0.05) in
the LDKT transplant group than in the SCD subgroup of DDKT kidneys stored by SCS, and the
SCD subgroup of DDKT kidneys stored by HMP.
Figure 4.5: Box and whisker plots of inter-lumen measurements. Measurements
for pre-implantation (left) and post-reperfusion (right) scans for the LDKT group
(green), and the DDKT subgroups: SCD kidneys stored by SCS, ECD kidneys stored
by SCS, and SCD kidneys stored by HMP. Each transplant group is further divided
into recovery groups which experienced either IGF (green) or DGF (red) following
transplant. Mean inter-lumen distance values for each recovery group are included in
the attached table with p-values (from Student’s t-test) and values adjusted for FDR
between transplant groups, representing significance of difference between recovery
groups for each transplant group. The percent change (increase or decrease) to inter-
lumen distance following reperfusion is included at the bottom of each table for both
recovery groups in each transplant group.

147
4.7.2 Inter-Lumen Results Stratified by Recovery Group (IGF vs. DGF)
Prior to implantation, inter-lumen distance was similar between the IGF and DGF recovery
groups in all transplant groups. Following reperfusion, inter-lumen distances in all transplant
groups decreased by less in the IGF recovery groups than in DGF groups (green and red
respectively in Figure 4.5). Post-reperfusion inter-lumen distance in the SCD subgroup of DDKT
kidneys stored by SCS was similar between IGF and DGF recovery groups. In the ECD subgroup,
post-reperfusion inter-lumen distance was moderately higher (p=0.06, FDR adjusted p-
value=0.09) in the IGF recovery group than in the DGF group. In the HMP group, post-reperfusion
inter-lumen distance was higher (p<0.05 FDR adjusted p-value<0.05) in the IGF recovery group
than in the DGF group.
4.7.3 Inter-Lumen Results by Association with Post-Transplant Creatinine Decline
Following our initial hypothesis that smaller inter-lumen distance would correlate with a
faster recovery following transplant (i.e. inter-lumen distance is negatively correlated with
creatinine values and higher inter-lumen distance is correlated with a steeper decline in creatinine
(i.e., has a negative interaction effect with time)), linear mixed effect models were fitted for each
DDKT transplant group. The pre-implantation fitted model for the SCS-SCD group did not support
the hypothesis (p=0.24), however the post-reperfusion SCS-SCD model showed strong support of
the hypothesis (p<0.001). The pre-implantation model for the SCS-ECD group did not support the
hypothesis (p=0.78), however the post-reperfusion model did support the hypothesis (p<0.05).
Finally, both the pre-implantation and post-reperfusion models for the HMP-SCD group showed
strong support for the hypothesis (p<0.0005, and p<0.005 respectively).

148
4.8 Parsimony of Image Measurements
To assess relevance and redundancy of measurements, the compiled measurements from
each transplant group were included in the pool of candidate predictor variables in lasso penalized
regression models, with the post-transplant function (IGF coded as 1 vs. DGF coded as 0) as the
binary outcome variable. Two sets of penalized logistic regression models were run for each
transplant group: one included pre-implantation measurements only in the candidate pool to
identify the most relevant of pre-implantation measurements to post-transplant function (i.e.,
measurements which could affect allocation or discard), and the other included all the pre-
implantation and post-reperfusion measurements in the pool to determine the most relevant
measurements to post-transplant function (i.e., measurements which could affect post-operative
care). The number of selected measurements was determined by minimizing the averaged 3-fold
cross-validation error. Selected measurements and their impact are listed in Table 4.1.
Table 4.1: Measurements selected by lasso penalized regression modeling
as the most relevant to post-transplant function. Selected measurements
from only pre-implantation measurements (top), and from the combined pre-
implantation and post-reperfusion measurements (bottom) were selected.

149
In the ECD subgroup of DDKT kidneys stored by SCS, the penalized model indicated pre-
implantation diameter was most relevant, among pre-implantation measurements, to post-
transplant function. Pre-implantation diameter had a negative impact on post-transplant function
in this instance, suggesting that larger lumen diameter is the most predictive of assessed
measurements for development of DGF in this transplant subgroup. When including both pre-
implantation and post-reperfusion measurements, the regression model indicated post-reperfusion
diameter and post-reperfusion density as the two variables, among all measurements, that were
most relevant to post-transplant function. Both have negative impact on the outcome, suggesting
that larger post-reperfusion lumen diameter and higher post-reperfusion lumen density are the most
predictive of assessed measurements for development of DGF in this transplant subgroup.
In the SCD subgroup of DDKT kidneys stored by SCS, the penalized model indicated pre-
implantation inter-centroid distance was most relevant, among pre-implantation measurements, to
post-transplant function. Pre-implantation inter-centroid distance had a negative impact on post-
transplant function in this instance, suggesting that larger inter-centroid distance is the most
predictive of assessed measurements for development of DGF in this transplant subgroup. When
including both pre-implantation and post-reperfusion measurements, the regression model
indicated pre-implantation inter-centroid distance and post-reperfusion density as the two
variables, among all measurements, that were most relevant to post-transplant function. Inter-
centroid distance and density had negative and positive impacts on outcome, respectively,
suggesting that larger pre-implantation inter-centroid distance and lower post-reperfusion lumen
density are the most predictive of assessed measurements for development of DGF in this
transplant subgroup.

150
In the SCD subgroup of DDKT kidneys stored by HMP, the penalized model indicated pre-
implantation diameter was most relevant, among pre-implantation measurements, to post-
transplant function. Pre-implantation diameter had a negative impact on post-transplant function
in this instance, suggesting that larger diameter is the most predictive of assessed measurements
for development of DGF in this transplant subgroup. When including both pre-implantation and
post-reperfusion measurements, the regression model indicated post-reperfusion inter-lumen
distance and post-reperfusion density as the two variables, among all measurements, that were
most relevant to post-transplant function. Both have negative impact on the outcome, suggesting
that smaller post-reperfusion inter-lumen distance and lower post-reperfusion lumen density are
the most predictive of assessed measurements for development of DGF in this transplant subgroup.
4.9 Summary
Fibrosis in donor kidneys may compromise graft viability, and is routinely evaluated in
pre-implantation kidney biopsies [201]–[203]. Partial EMT may play a role in the progression of
fibrosis. This process has the effect of flattening PCT epithelial cells, and may produce an
increased lumen diameter in affected tubules [204], [205]. Similarly, fibrosis contributes to tubular
atrophy, and in turn, compensatory hypertrophy of surviving PCTs [206], [207]. The lumen of
hypertrophied tubules is also frequently dilated to accommodate their increased role [208]. The
effects of fibrosis therefore may be visible in OCT imaging, evidenced by the dilation of tubular
lumen.
Acute tubular injury (ATI) in donor kidneys may similarly compromise graft viability. ATI
can induce simplification of the tubular epithelium [62]. Shedding of the PCTs’ microvillus brush
border and sloughing of tubular epithelial cells into the lumen may also present as a dilation of the

151
tubular lumen in OCT scans. In addition, as blood flow is restored following reperfusion, sloughed
epithelial cells may obstruct flow and increase proximal tubule pressure dramatically; heightened
pressure may produce substantial dilation of the tubular lumen presented in post-reperfusion OCT
scans and potentially pre-implantation OCT scans of kidneys preserved by HMP [209]. The short-
term effects of ATI therefor may be visible in OCT imaging, evidenced by the dilation of visible
tubular lumen.
Swelling of the PCT epithelium, induced by ischemic damage, may similarly represent the
effects or symptoms of ATI [62]. Epithelial swelling occludes the luminal space, resulting in a
reduced diameter and an increased inter-lumen distance. If PCT swelling reduces the tubular lumen
beyond the resolution of the OCT system, diameter and inter-lumen measurements would not
reflect the contribution of more swollen PCTs. Density measurements, however, would illustrate
this effect.
In the SCD subgroup of DDKT kidneys stored by SCS, there were no strong differences in
measurements between IGF and DGF recovery groups. In the ECD subgroup—those most at risk
for poor post-transplant function, and most subject to discard—measures of PCT lumen density
and diameter, acquired both prior to implantation and following reperfusion, were lower in the
IGF than in the DGF recovery group. The IGF recovery group similarly demonstrated a larger
inter-lumen distance measurement following reperfusion than the DGF group. Taken together,
these measurements suggest a flattening of the PCT epithelium and consequent dilation of tubular
lumen in ECD kidneys which go on to experience DGF. This may be a symptom of pre-existing
pathology (fibrosis) or ATI. It is unclear why this pattern does not present in the SCD subgroup.
Following reperfusion, density and diameter measurements in both the SCD and ECD
subgroups of DDKT kidneys stored by SCS experienced increases in both IGF and DGF recovery

152
groups. This may reflect dissipation of epithelial swelling as the kidney moves away from an
ischemic state. This may also result from the effect of flow rate of filtrate on luminal diameter
[210]. Increased distinction between IGF and DGF recovery group measurements following
reperfusion may be due to pre-existing pathology being revealed by the dissipation of swelling
(e.g. dilated lumen of hypertrophied tubules may become more evident when epithelial swelling
subsides). More likely, this is the result of the reperfusion process inducing further shedding of the
microvillus brush border and/or further epithelial sloughing. Similarly, sloughed tubular epithelial
cells which may have fully occluded the lumen during static-storage may be cleared following
reperfusion, revealing further luminal dilation.
In the ECD subgroup, but not the SCD subgroup, of DDKT kidneys stored by SCS, the
DGF recovery group experienced an increase in inter-centroid distance following reperfusion,
while the IGF group did not. This may reflect infiltration of inflammatory cells into the interstitial
space, and subsequent interstitial edema [211]. This would be consistent with the ATI theory and
would suggest symptoms of IRI in the DGF group.
In the SCD subgroup of DDKT kidneys stored by HMP, diameter, and inter-lumen
measurements for DGF kidneys echo the trends apparent in the ECD subgroup of DDKT kidneys
stored by SCS (i.e. increased lumen diameter and reduced inter-lumen distance). This suggests
that, in HMP preserved kidneys, ATI or pre-existing pathology may also present as dilated tubular
lumen with simplified or flattened tubular epithelium. Inter-centroid measurements similarly echo
trends apparent in the ECD transplant group. Following reperfusion, the DGF recovery group
experienced an increase in inter-centroid distance and subsequently exhibited a higher inter-
centroid measurement than the IGF recovery group. This again may suggest interstitial edema
following reperfusion.

153
Surprisingly, HMP kidneys in the DGF recovery group experienced a dramatic reduction
in density following reperfusion, while the IGF group experienced little change. The resulting IGF
density was higher than the density in the DGF group. Higher diameter and lower inter-lumen
distances in the post-reperfusion DGF group would normally correlate with higher density
measurements. One explanation for this contradictory result is that some PCT lumens in the HMP-
DGF group had become fully occluded following reperfusion, excluding these PCTs from diameter
and inter-lumen measurement, but still detracting from luminal area in the density measurement.

154
CONCLUSION
There is a dire need in the transplant community for new measures of kidney viability. To
support the growing need for kidneys, higher risk kidneys must be considered for transplant. To
efficiently utilize this deeper end of the donor pool, surgeons must be able to confidently predict
kidneys’ potential function and longevity following transplant.
OCT provides a non-invasive method for obtaining optical cross-sections of the superficial
kidney cortex [212], [213]. These images reveal the microanatomy of the PCTs, which comprise
the majority of the superficial kidney cortex. Swelling of the epithelium of the PCTs may be
identified in OCT images by reduction in visible tubular lumen area, and may be considered a
symptom of ischemic insult [199], [214]; as PCT epithelium swells, lumen space is occluded.
Conversely, dilation of the tubular lumen may represent tubular simplification as a symptom of
ATI (i.e., shedding of the PCT microvillus brush border and/or epithelial sloughing); loss of
epithelial cells or microvilli should increase lumen space. Alternatively, dilation of the tubular
lumen could be considered a symptom of pre-existing pathology (i.e., as partial EMT, hypertrophy,
or potentially tubular atrophy).
Quantification of the degree of swelling, simplification, or fibrotic symptoms in OCT
images may provide a valuable addition to current measures of kidney viability. If the degree of
ischemic damage could be accurately determined prior to transplant from quantification of
swelling or tubular simplification, the degree of IRI which would ensue following reperfusion
could potentially be ascertained. An accurate measure and quantification of the accumulation of
factors from ischemic damage that would contribute to IRI could enable a widening of the donor

155
pool through inclusion of kidneys which based purely on the duration of cold and warm ischemia
would normally be discarded for an assumed degree of ischemic damage but which may still be
viable due to an increased resistance to ischemic insult. Quantification of fibrotic dilation in
OCT imaging of kidneys may similarly provide a valuable addition to current viability measures.
Biopsy procedures are not only invasive, but localized and destructive to the biopsied sample.
OCT’s non-invasive nature affords it the opportunity to visualize fibrotic symptoms throughout
the kidney, and without damage to the tissue being directly investigated. Identification by OCT
of pre-existing pathology, or ischemic damage/ATI prior to transplant, may inform transplant
surgeons’ decision to accept or reject a kidney for transplant, or may affect allocation of the
graft. In this regard, OCT may supplement or guide biopsies and offer a more global view of the
pathology and its distribution.
OCT also has potential utility following transplant, where a more accurate prediction of
post-transplant function could influence post-operative care. DGF is an established risk factor for
survival of a transplanted kidney [215]. If DGF can be predicted immediately following
transplant, early post-operative biopsies to investigate poor function can be avoided. Early
diagnosis of DGF can similarly inform the development of immunosuppressive treatments,
where evidence of potential DGF would provide indications for a less nephrotoxic, Calcineurin-
sparing regiment [216]. An accurate prediction of DGF would also promote the usage of any of a
number of anti-DGF medications currently in development, should they be approved.
OCT imaging performed following transplant has the added benefit of providing a view
of kidney microanatomy following dissipation of swelling, following clearance of debris,
following reperfusion-induced damage, and under the normal pressure of luminal flow.

156
Dissipation of swelling can provide a benchmark from which to grade the degree of swelling
seen prior to implantation. The dissipation of swelling can also reveal tubular dilation associated
with fibrotic symptoms which may have been masked by luminal occlusion by swollen
epithelium. Reperfusion may clear debris which has occluded the luminal space, again revealing
potential fibrotic dilation, and also revealing tubular simplification which may have been
disguised by debris occlusion of the lumen (i.e., sloughed epithelial cells and microvilli in static
lumen may increase the refractive index of the luminal space, preventing the lumen from being
discriminable from cortex in OCT imaging). The reperfusion process may induce further tubular
simplification as a product of IRI, leading to further tubular dilation following transplant.
Finally, the intra-tubular pressure from flow through the lumen following reperfusion may reveal
patterns not seen in the static kidney; fibrotic tubules, for example, may be less flexible to the
effects of flow rate and so respond differently to the increased flow.
This study shows that dilation of tubular lumen and simplification of tubular epithelium
of the PCTs can be assessed by OCT, and that these measurements correlate with post-transplant
function in some transplant groups. These factors may represent symptoms of pre-existing
pathology or ATI. The variability between manual raters in this study demonstrates the necessity
for consistency and reproducibility in analysis. The fully automated analysis pipeline presented
in this thesis and used in this study removes the elements of user bias and subjective
segmentation. Similarly, manual segmentation is considerably too slow a process when advising
a surgeon on the time-sensitive decision to accept or reject a kidney for transplant. Fully
automated segmentation and analysis provides a high-speed solution to obtaining accurate
predictive measures.

157
This study assessed the potential utility of OCT imaging in predicting post-transplant
function. While results are promising, inclusion of additional variables (KDPI, ischemic times,
biopsy scoring, etc.) into one prediction model may provide a more comprehensive view of kidney
viability. Similarly, global OCT imaging and capture of 3D volumes would provide a more
detailed view of the distribution of PCT morphology, and may aid in prediction of post-transplant
function. 3D volumes would similarly enable adoption of previously developed OCT segmentation
strategies, for example the Hessian filter approach by Yousefi et al. and single-scattering model
with segment-joining algorithm by Gong et al. [217], [218].
One limitation of this study is the imaging protocol, which heavily weighted the
composition of image sets towards regions of the kidney where tubule lumens were most visible
and dilated. While this protocol may highlight focal points of pathology, it does not provide a
global distribution of PCT features. Global imaging sampling multiple areas of the kidney may
reveal a more heterogeneous pattern of swelling and dilation, with some areas exhibiting tubular
lumen dilated by fibrosis or ATI, and other areas exhibiting significant swelling.
In future studies, a more systematic and global imaging strategy may yield further
insights. While the selection of a single B-scan for each image set removes issues of redundancy,
it also severely limits the total area being investigated. In future studies, a 3D imaging protocol
would eliminate this issue, allowing all imaging data to be evaluated and a larger volume of
kidney to be assessed. Similarly, 3D imaging would enable orientation of tubular features in a
3D space and would provide more accurate measurements. While the linear regression model
utilized in this study attempts to correct for this issue, training data for the model is extracted
only from a single preserved kidney and may not be applicable to all kidneys.

158
BIBLIOGRAPHY
[1] N. Perico, P. Ruggenenti, M. Scalamogna, and G. Remuzzi, “Tackling the Shortage of
Donor Kidneys: How to Use the Best that We Have,” Am. J. Nephrol., vol. 23, no. 4, pp.
245–259, 2003.
[2] A. Hart et al., “OPTN/SRTR 2016 Annual Data Report: Kidney,” Am. J. Transplant., vol.
18, pp. 18–113, Jan. 2018.
[3] A. O. Ojo et al., “Survival in recipients of marginal cadaveric donor kidneys compared
with other recipients and wait-listed transplant candidates.,” J. Am. Soc. Nephrol., vol. 12,
no. 3, pp. 589–97, Mar. 2001.
[4] P. Nagaraja et al., “Impact of Expanded Criteria Variables on Outcomes of Kidney
Transplantation from Donors After Cardiac Death,” Transplantation, vol. 99, no. 1, pp.
226–231, Jan. 2015.
[5] J. Pascual, J. Zamora, and J. D. Pirsch, “A Systematic Review of Kidney Transplantation
From Expanded Criteria Donors,” Am. J. Kidney Dis., vol. 52, no. 3, pp. 553–586, Sep.
2008.
[6] Y. Tomita, T. Tojimbara, K. Iwadoh, I. Nakajima, and S. Fuchinoue, “Long-Term
Outcomes in Kidney Transplantation From Expanded-Criteria Donors After Circulatory
Death,” Transplant. Proc., vol. 49, no. 1, pp. 45–48, Jan. 2017.
[7] S. Bae, A. B. Massie, X. Luo, S. Anjum, N. M. Desai, and D. L. Segev, “Changes in
Discard Rate After the Introduction of the Kidney Donor Profile Index (KDPI),” Am. J.
Transplant., vol. 16, no. 7, pp. 2202–2207, Jul. 2016.
[8] A. O. Ojo et al., “Survival in recipients of marginal cadaveric donor kidneys compared
with other recipients and wait-listed transplant candidates.,” J. Am. Soc. Nephrol., vol. 12,
no. 3, pp. 589–97, Mar. 2001.
[9] M. G. Snoeijs et al., “Kidneys from donors after cardiac death provide survival benefit.,”
J. Am. Soc. Nephrol., vol. 21, no. 6, pp. 1015–21, Jun. 2010.
[10] R. L. Heilman, E. P. Green, K. S. Reddy, A. Moss, and B. Kaplan, “Potential Impact of
Risk and Loss Aversion on the Process of Accepting Kidneys for Transplantation.,”
Transplantation, vol. 101, no. 7, pp. 1514–1517, Jul. 2017.
[11] M. D. Doshi et al., “Utility of Applying Quality Assessment Tools for Kidneys With
KDPI ≥80.,” Transplantation, vol. 101, no. 6, pp. 1125–1133, Jun. 2017.
[12] G. J. Tortora and B. Derrickson, Principles of anatomy and physiology. Hoboken, NJ :
John Wiley & Sons, 2010.
[13] A. a McDonough, “Mechanisms of proximal tubule sodium transport regulation that link
extracellular fluid volume and blood pressure.,” Am. J. Physiol. Regul. Integr. Comp.
Physiol., vol. 298, no. 4, pp. R851–R861, 2010.
[14] A. Leaf, “Cell swelling: a factor in ischemic tissue injury,” Circulation, vol. 48, no. 3, pp.
455–458, 1973.
[15] M. J. Taylor, “Biology of Cell Survival in the Cold,” in Advances in Biopreservation,

159
2006, pp. 15–62.
[16] J. L. Zhuo and X. C. Li, “Proximal Nephron,” Compr. Physiol., vol. 3, no. 3, pp. 1079–
1123, 2013.
[17] M. Ikeda, W. Prachasilchai, M. J. Burne-Taney, H. Rabb, and N. Yokota-Ikeda, “Ischemic
acute tubular necrosis models and drug discovery: a focus on cellular inflammation,” Drug
Discovery Today. 2006.
[18] B. J. McNamara, B. Diouf, R. N. Douglas-Denton, M. D. Hughson, W. E. Hoy, and J. F.
Bertram, “A comparison of nephron number, glomerular volume and kidney weight in
Senegalese Africans and African Americans,” Nephrol. Dial. Transplant., 2010.
[19] L. J. Mandel, “Metabolic substrates, cellular energy production, and the regulation of
proximal tubular transport,” Annu. Rev. Physiol., vol. 47, no. 1, pp. 85–101, 1985.
[20] B. D. Ross, J. Espinal, and P. Silva, “Glucose metabolism in renal tubular function,”
Kidney Int., vol. 29, pp. 54–67, 1986.
[21] D. Bon, Chatauret, S. Guraud, and T. Hauet, “New strategies to optimize kidney recovery
and preservation in transplantation,” Nephrology, vol. 8, pp. 339–347, 2012.
[22] K. K. Tennankore, S. J. Kim, I. P. J. Alwayn, and B. A. Kiberd, “Prolonged warm
ischemia time is associated with graft failure and mortality after kidney transplantation.,”
Kidney Int., vol. 89, no. 3, pp. 648–58, Mar. 2016.
[23] J. Gill, C. Rose, J. Lesage, Y. Joffres, J. Gill, and K. O’Connor, “Use and Outcomes of
Kidneys from Donation after Circulatory Death Donors in the United States,” J. Am. Soc.
Nephrol., vol. 28, no. 12, pp. 3647–3657, Dec. 2017.
[24] F. O. Belzer, B. S. Ashby, J. S. Huang, and J. E. Dunphy, “Etiology of rising perfusion
pressure in isolated organ perfusion.,” Ann. Surg., 1968.
[25] D. Butter G, A. Saunder, D. Marsh, and J. Southard, “Comparison of solutions for
preservation of the rabbit liver as tested by isolated perfusion,” Transpl. Int., vol. 8, no. 6,
pp. 466–471, 1995.
[26] C. Y. Lee and M. J. Mangino, “Preservation methods for kidney and liver,”
Organogenesis. 2009.
[27] N. Ahmad, L. Hostert, J. R. Pratt, K. J. Billar, D. J. Potts, and J. P. A. Lodge, “A
pathophysiologic study of the kidney tubule to optimize organ preservation solutions,”
Kidney Int., 2004.
[28] J. J. Grantham, C. M. Lowe, M. Dellasega, and B. R. Cole, “Effect of hypotonic medium
on K and Na content of proximal renal tubules,” Am. J. Physiol. Physiol., 1977.
[29] A. Sardini, J. S. Amey, K.-H. Weylandt, M. Nobles, M. A. Valverde, and C. F. Higgins,
“Cell volume regulation and swelling-activated chloride channels,” Biochim. Biophys.
Acta (BBA)-Biomembranes, vol. 1618, no. 2, pp. 153–162, 2003.
[30] R. F. Parsons and J. V. Guarrera, “Preservation solutions for static cold storage of
abdominal allografts: which is best?,” Transplant. Curr. Opin., vol. 19, no. 2, pp. 100–107,
2014.

160
[31] A. Debout et al., “Each additional hour of cold ischemia time significantly increases the
risk of graft failure and mortality following renal transplantation,” Kidney Int., vol. 87, no.
2, pp. 343–349, Feb. 2015.
[32] E. R. Pieter Hoogland, T. C. van Smaalen, M. H. L. Christiaans, and L. W. E. van Heurn,
“Kidneys from uncontrolled donors after cardiac death: which kidneys do worse?,”
Transpl. Int., vol. 26, no. 5, pp. 477–484, May 2013.
[33] N. O. S. Camara, W. W. Williams Jr, and A. Pacheco-Silva, “Proximal tubular
dysfunction as an indicator of chronic graft dysfunction,” Brazilian J. Med. Biol. Res., vol.
42, pp. 229–236, 2009.
[34] M. A. Venkatachalam, D. B. Bernard, J. F. Donohoe, and N. G. Levinsky, “Ischemic
damage and repair in the rat proximal tubule: Differences among the S1, S2 and S3
segments,” Kidney Int., vol. 14, pp. 31–49, 1978.
[35] J. M. Weinberg, M. A. Venkatachalam, N. Roeser, and I. Nissim, “Mitochondrial
dysfunction during hypoxia/reoxygenation and its correction by anaerobic metabolism of
citric acid cycle intermediates,” PNAS, vol. 97, no. 6, pp. 2826–2831, 2000.
[36] D. J. Parekh et al., “Tolerance of the Human Kidney to Isolated Controlled Ischemia,” J.
Am. Soc. Nephrol., vol. 24, no. 3, pp. 506–517, Mar. 2013.
[37] J. M. Weinberg et al., “Anaerobic and aerobic pathways for salvage of proximal tubules
from hypoxia-induced mitochondrial injury.,” Am. J. Physiol. Renal Physiol., 2000.
[38] D. K. Das, “Metabolic and morphological alterations induced by ischemia and reperfusion
during cardiac surgery,” Pathophysiol. Reperfus. Inj., pp. 265–267, 1993.
[39] C. A. Schumacher, A. Baartscheer, R. Coronel, and J. W. T. Fiolet, “Energy-dependent
transport of calcium to the extracellular space during acute ischemia of the rat heart,” J.
Mol. Cell. Cardiol., 1998.
[40] E. K. Hoffmann and L. O. Simonsen, “Membrane mechanisms in volume and pH
regulation in vertebrate cells,” Physiol. Rev., vol. 69, no. 2, pp. 315–382, Apr. 1989.
[41] M. Büsing, U. T. Hopt, W. Schareck, M. Ernst, and K. Morgenroth, “Ultrastructural
changes of different preserved human kidney allografts before and after reperfusion.,”
Transplant. Proc., vol. 22, no. 2, pp. 448–9, Apr. 1990.
[42] P. M. Andrews, B. S. Khirabadi, and B. C. Bengs, “Using tandem scanning confocal
microscopy to predict the status of donor kidneys.,” Nephron, vol. 91, no. 1, pp. 148–55,
May 2002.
[43] N. Chatauret, L. Badet, B. Barrou, and T. Hauet, “Ischemia-reperfusion: From cell biology
to acute kidney injury,” Progrès en Urol., vol. 24, pp. S4–S12, Jun. 2014.
[44] M. Kosieradzki and W. Rowiński, “Ischemia/Reperfusion Injury in Kidney
Transplantation: Mechanisms and Prevention,” Transplant. Proc., vol. 40, no. 10, pp.
3279–3288, Dec. 2008.
[45] S. K. Malek, “Procurement biopsies in kidneys retrieved for transplantation.,” Clin. J. Am.
Soc. Nephrol., vol. 9, no. 3, pp. 443–4, Mar. 2014.

161
[46] D. Patschan, S. Patschan, and G. A. Müller, “Inflammation and Microvasculopathy in
Renal Ischemia Reperfusion Injury,” J. Transplant., 2012.
[47] J. M. Thurman, “Triggers of inflammation after renal ischemia/reperfusion,” Clinical
Immunology. 2007.
[48] C. Li and R. M. Jackson, “Reactive species mechanisms of cellular hypoxia-
reoxygenation injury,” AJP Cell Physiol., 2002.
[49] G. T. Vatassery, “Impairment of brain mitochondrial oxidative phosphorylation
accompanying vitamin E oxidation induced by iron or reactive nitrogen species: A
selective review,” Neurochemical Research. 2004.
[50] J. A. Lee and D. G. Allen, “Changes in intracellular free calcium concentration during
long exposures to simulated ischemia in isolated mammalian ventricular muscle,” Circ.
Res., 1992.
[51] S. Javadov, J. C. Hunter, G. Barreto-Torres, and R. Parodi-Rullan, “Targeting the
mitochondrial permeability transition: Cardiac ischemia-reperfusion versus
carcinogenesis,” Cellular Physiology and Biochemistry. 2011.
[52] S. G. Kasimsetty and D. B. McKay, “Ischemia as a factor affecting innate immune
responses in kidney transplantation,” Current Opinion in Nephrology and Hypertension.
2016.
[53] E. Lechevallier et al., “Posttransplantation acute tubular necrosis: risk factors and
implications for graft survival.,” Am. J. Kidney Dis., vol. 32, no. 6, pp. 984–91, Dec.
1998.
[54] G. Gobé, D. Willgoss, N. Hogg, E. Schoch, and Z. Endre, “Cell survival or death in renal
tubular epithelium after ischemia-reperfusion injury.,” Kidney Int., vol. 56, no. 4, pp.
1299–304, Oct. 1999.
[55] B. Schröppel and C. Legendre, “Delayed kidney graft function: from mechanism to
translation.,” Kidney Int., vol. 86, no. 2, pp. 251–8, Aug. 2014.
[56] L. W. Gaber, L. W. Moore, R. R. Alloway, M. H. Amiri, S. R. Vera, and A. O. Gaber,
“Glomerulosclerosis as a determinant of posttransplant function of older donor renal
allografts.,” Transplantation, vol. 60, no. 4, pp. 334–9, Aug. 1995.
[57] J. Dominguez et al., “Benefits of Early Biopsy on the Outcome of Kidney
Transplantation,” Transplant. Proc., vol. 37, no. 8, pp. 3361–3363, Oct. 2005.
[58] G. W. Moeckel, “Pathologic Perspectives on Acute Tubular Injury Assessment in the
Kidney Biopsy,” Semin. Nephrol., vol. 38, no. 1, pp. 21–30, Jan. 2018.
[59] a M. Sheridan and J. V Bonventre, “Cell biology and molecular mechanisms of injury in
ischemic acute renal failure.,” Curr. Opin. Nephrol. Hypertens., 2000.
[60] E. M. Ongeri, O. Anyanwu, W. B. Reeves, and J. S. Bond, “Villin and actin in the mouse
kidney brush-border membrane bind to and are degraded by meprins, an interaction that
contributes to injury in ischemia-reperfusion,” AJP Ren. Physiol., 2011.
[61] B. A. Molitoris, A. Geerdes, and J. R. McIntosh, “Dissociation and redistribution of

162
Na+,K+-ATPase from its surface membrane actin cytoskeletal complex during cellular
ATP depletion,” J. Clin. Invest., 1991.
[62] G. W. Moeckel, “Pathologic Perspectives on Acute Tubular Injury Assessment in the
Kidney Biopsy,” Seminars in Nephrology. 2018.
[63] P. Boor, T. Ostendorf, and J. Floege, “Renal fibrosis: novel insights into mechanisms and
therapeutic targets,” Nat. Rev. Nephrol., vol. 6, no. 11, pp. 643–656, Nov. 2010.
[64] L. C. Racusen, K. Solez, and R. Colvin, “Fibrosis and atrophy in the renal allograft:
interim report and new directions.,” Am. J. Transplant, vol. 2, no. 3, pp. 203–6, Mar.
2002.
[65] R. A. Risdon, J. C. Sloper, and H. E. De Wardener, “Relationship between renal function
and histological changes found in renal-biopsy specimens from patients with persistent
glomerular nephritis.,” Lancet (London, England), vol. 2, no. 7564, pp. 363–6, Aug. 1968.
[66] B. Kaissling and M. Hir, “The renal cortical interstitium: morphological and functional
aspects,” Histochem. Cell Biol., vol. 130, no. 2, pp. 247–262, Aug. 2008.
[67] A. B. Farris and R. B. Colvin, “Renal interstitial fibrosis: mechanisms and evaluation.,”
Curr. Opin. Nephrol. Hypertens., vol. 21, no. 3, pp. 289–300, May 2012.
[68] R. B. Colvin, “Eye of the needle.,” Am. J. Transplant, vol. 7, no. 2, pp. 267–8, Feb. 2007.
[69] Y. Ovadya and V. Krizhanovsky, “A new Twist in kidney fibrosis,” Nat. Med., vol. 21,
no. 9, pp. 975–977, Sep. 2015.
[70] S. Lovisa, M. Zeisberg, and R. Kalluri, “Partial Epithelial-to-Mesenchymal Transition and
Other New Mechanisms of Kidney Fibrosis.,” Trends Endocrinol. Metab., vol. 27, no. 10,
pp. 681–695, Oct. 2016.
[71] M. L. Nicholson, E. Bailey, S. Williams, K. P. Harris, and P. N. Furness, “Computerized
histomorphometric assessment of protocol renal transplant biopsy specimens for surrogate
markers of chronic rejection.,” Transplantation, vol. 68, no. 2, pp. 236–41, Jul. 1999.
[72] W. Kriz and M. Lehir, “Pathways to nephron loss starting from glomerular diseases—
Insights from animal models,” Kidney Int., vol. 67, no. 2, pp. 404–419, Feb. 2005.
[73] R. L. Chevalier, “The proximal tubule is the primary target of injury and progression of
kidney disease: role of the glomerulotubular junction.,” Am. J. Physiol. Renal Physiol.,
vol. 311, no. 1, pp. F145-61, 2016.
[74] A. Servais et al., “Interstitial fibrosis evolution on early sequential screening renal
allograft biopsies using quantitative image analysis.,” Am. J. Transplant, vol. 11, no. 7,
pp. 1456–63, Jul. 2011.
[75] S. Bunnag et al., “Molecular correlates of renal function in kidney transplant biopsies.,” J.
Am. Soc. Nephrol., vol. 20, no. 5, pp. 1149–60, May 2009.
[76] D. Serón et al., “Protocol renal allograft biopsies and the design of clinical trials aimed to
prevent or treat chronic allograft nephropathy.,” Transplantation, vol. 69, no. 9, pp. 1849–
55, May 2000.
[77] P. Cravedi and P. S. Heeger, “Complement as a multifaceted modulator of kidney

163
transplant injury,” J. Clin. Invest., vol. 124, no. 6, pp. 2348–2354, Jun. 2014.
[78] J. Floege et al., “Age-related glomerulosclerosis and interstitial fibrosis in Milan
normotensive rats: a podocyte disease.,” Kidney Int., vol. 51, no. 1, pp. 230–43, Jan. 1997.
[79] A. B. Fogo, “Causes and pathogenesis of focal segmental glomerulosclerosis,” Nat. Rev.
Nephrol., vol. 11, no. 2, pp. 76–87, Feb. 2015.
[80] E. Ważna et al., “Arteriolar Hyalinization in Implantation Kidney Biopsies as a Predictor
of Graft Function,” Transplant. Proc., vol. 41, no. 8, pp. 2975–2977, Oct. 2009.
[81] A. T. Woestenburg, G. A. Verpooten, D. K. Ysebaert, E. A. Van Marck, D. Verbeelen,
and J.-L. Bosmans, “Fibrous Intimal Thickening at Implantation Adversely Affects Long-
Term Kidney Allograft Function,” Transplantation, vol. 87, no. 1, pp. 72–78, Jan. 2009.
[82] C. M. Burchfiel, R. E. Tracy, P. H. Chyou, and J. P. Strong, “Cardiovascular risk factors
and hyalinization of renal arterioles at autopsy. The Honolulu Heart Program.,”
Arterioscler. Thromb. Vasc. Biol., vol. 17, no. 4, pp. 760–8, Apr. 1997.
[83] M. Matignon et al., “Arteriolar hyalinization predicts delayed graft function in deceased
donor renal transplantation.,” Transplantation, vol. 86, no. 7, pp. 1002–5, Oct. 2008.
[84] K. Kohagura et al., “An association between uric acid levels and renal arteriolopathy in
chronic kidney disease: a biopsy-based study,” Hypertens. Res., vol. 36, no. 1, pp. 43–49,
Jan. 2013.
[85] C. Kaplan, B. Pasternack, H. Shah, and G. Gallo, “Age-related incidence of sclerotic
glomeruli in human kidneys.,” Am. J. Pathol., vol. 80, no. 2, pp. 227–34, Aug. 1975.
[86] M. S. Hommos, R. J. Glassock, and A. D. Rule, “Structural and Functional Changes in
Human Kidneys with Healthy Aging,” J. Am. Soc. Nephrol., vol. 28, no. 10, pp. 2838–
2844, Oct. 2017.
[87] L. W. Gaber, L. W. Moore, R. R. Alloway, M. H. Amiri, S. R. Vera, and A. O. Gaber,
“Glomerulosclerosis as a determinant of posttransplant function of older donor renal
allografts.,” Transplantation, vol. 60, no. 4, pp. 334–9, Aug. 1995.
[88] C. J. Wang, J. B. Wetmore, G. S. Crary, and B. L. Kasiske, “The Donor Kidney Biopsy
and Its Implications in Predicting Graft Outcomes: A Systematic Review,” Am. J.
Transplant., vol. 15, no. 7, pp. 1903–1914, Jul. 2015.
[89] I. Jochmans and J. Pirenne, “Graft quality assessment in kidney transplantation: not an
exact science yet!,” Curr. Opin. Organ Transplant., vol. 16, no. 2, pp. 174–179, Apr. 2011.
[90] A. B. Fogo, “Causes and pathogenesis of focal segmental glomerulosclerosis,” Nat. Rev.
Nephrol., vol. 11, no. 2, pp. 76–87, Feb. 2015.
[91] V. D. D’Agati, A. B. Fogo, J. A. Bruijn, and J. C. Jennette, “Pathologic classification of
focal segmental glomerulosclerosis: a working proposal.,” Am. J. Kidney Dis., vol. 43, no.
2, pp. 368–82, Feb. 2004.
[92] M. D. Hughson, K. Johnson, R. J. Young, W. E. Hoy, and J. F. Bertram, “Glomerular size
and glomerulosclerosis: relationships to disease categories, glomerular solidification, and
ischemic obsolescence.,” Am. J. Kidney Dis., vol. 39, no. 4, pp. 679–88, Apr. 2002.

164
[93] A. K. Israni et al., “New National Allocation Policy for Deceased Donor Kidneys in the
United States and Possible Effect on Patient Outcomes,” J. Am. Soc. Nephrol., vol. 25, no.
8, pp. 1842–1848, Aug. 2014.
[94] R. S. Sung et al., “Determinants of Discard of Expanded Criteria Donor Kidneys: Impact
of Biopsy and Machine Perfusion,” Am. J. Transplant., vol. 8, no. 4, pp. 783–792, Apr.
2008.
[95] E. Tavares da Silva et al., “Pretransplant Biopsy in Expanded Criteria Donors: Do We
Really Need It?,” Transplant. Proc., vol. 46, no. 10, pp. 3330–3334, Dec. 2014.
[96] M. Naesens, “Zero-Time Renal Transplant Biopsies,” Transplantation, vol. 100, no. 7, pp.
1425–1439, Jul. 2016.
[97] B. J. Nankivell and J. R. Chapman, “The Significance of Subclinical Rejection and the
Value of Protocol Biopsies,” Am. J. Transplant., vol. 6, no. 9, pp. 2006–2012, Sep. 2006.
[98] M. Mengel et al., “Protocol Biopsies in Renal Transplantation: Insights into Patient
Management and Pathogenesis,” Am. J. Transplant., vol. 7, no. 3, pp. 512–517, Mar.
2007.
[99] K. Solez et al., “Banff 07 Classification of Renal Allograft Pathology: Updates and Future
Directions,” Am. J. Transplant., vol. 8, no. 4, pp. 753–760, Apr. 2008.
[100] D. D. H. Koo, K. I. Welsh, J. A. Roake, P. J. Morris, and S. V. Fuggle,
“Ischemia/Reperfusion Injury in Human Kidney Transplantation,” Am. J. Pathol., vol.
153, no. 2, pp. 557–566, Aug. 1998.
[101] M. Haas, L. E. Ratner, and R. A. Montgomery, “C4d staining of perioperative renal
transplant biopsies.,” Transplantation, vol. 74, no. 5, pp. 711–7, Sep. 2002.
[102] J. Kanellis et al., “JNK signalling in human and experimental renal ischaemia/reperfusion
injury,” Nephrol. Dial. Transplant., vol. 25, no. 9, pp. 2898–2908, Sep. 2010.
[103] G. Remuzzi et al., “Early experience with dual kidney transplantation in adults using
expanded donor criteria. Double Kidney Transplant Group (DKG).,” J. Am. Soc.
Nephrol., vol. 10, no. 12, pp. 2591–8, Dec. 1999.
[104] R. B. Munivenkatappa et al., “The Maryland Aggregate Pathology Index: A Deceased
Donor Kidney Biopsy Scoring System for Predicting Graft Failure,” Am. J. Transplant.,
vol. 8, no. 11, pp. 2316–2324, Nov. 2008.
[105] L. C. Racusen et al., “The Banff 97 working classification of renal allograft pathology,”
Kidney Int., vol. 55, no. 2, pp. 713–723, Feb. 1999.
[106] D. M. Bhowmik, A. K. Dinda, P. Mahanta, and S. K. Agarwal, “The evolution of the
Banff classification schema for diagnosing renal allograft rejection and its implications for
clinicians.,” Indian J. Nephrol., vol. 20, no. 1, pp. 2–8, Jan. 2010.
[107] H. Liapis et al., “Banff Histopathological Consensus Criteria for Preimplantation Kidney
Biopsies,” Am. J. Transplant., vol. 17, no. 1, pp. 140–150, Jan. 2017.
[108] A. E. Suttie, J. R. Leininger, A. E. Bradley, and G. A. Boorman, Boorman’s pathology of
the rat : reference and atlas. .

165
[109] S. P. Laucks and M. S. F. McLachlan, “Aging and simple cysts of the kidney,” Br. J.
Radiol., vol. 54, no. 637, pp. 12–14, Jan. 1981.
[110] P. Veroux et al., “Living transplantation using a kidney with a large cyst as curative
treatment of donor’s hypertension,” Nephrol. Dial. Transplant., vol. 17, no. 12, pp. 2258–
2260, Dec. 2002.
[111] D. Grotemeyer et al., “Renal Cysts in Living Donor Kidney Transplantation: Long-Term
Follow-up in 25 Patients,” Transplant. Proc., vol. 41, no. 10, pp. 4047–4051, Dec. 2009.
[112] H. Myrvang, “Native renal cysts linked to RCC in transplanted kidneys,” Nat. Rev.
Nephrol., vol. 7, no. 3, pp. 125–125, Mar. 2011.
[113] S. M. Flechner, J. Kobashigawa, and G. Klintmalm, “Calcineurin inhibitor-sparing
regimens in solid organ transplantation: focus on improving renal function and
nephrotoxicity.,” Clin. Transplant., vol. 22, no. 1, pp. 1–15, Jun. 2007.
[114] “Introduction to OCT - OBEL.” [Online]. Available:
http://obel.ee.uwa.edu.au/research/fundamentals/introduction-oct/. [Accessed: 06-Mar-
2019].
[115] K. Hueper et al., “T2 relaxation time and apparent diffusion coefficient for noninvasive
assessment of renal pathology after acute kidney injury in mice: Comparison with
histopathology,” Invest. Radiol., 2013.
[116] P. Steiger, S. Barbieri, A. Kruse, M. Ith, and H. C. Thoeny, “Selection for biopsy of
kidney transplant patients by diffusion-weighted MRI,” Eur. Radiol., vol. 27, no. 10, pp.
4336–4344, Oct. 2017.
[117] B. T. Kudryk, C. R. Martinez, S. Gunasekeran, and G. Ramirez, “CT-guided renal biopsy
using a coaxial technique and an automated biopsy gun.,” South. Med. J., vol. 88, no. 5,
pp. 543–6, May 1995.
[118] M. D. Patel, S. W. Young, J. Scott Kriegshauser, and N. Dahiya, “Ultrasound-guided renal
transplant biopsy: practical and pragmatic considerations,” Abdom. Radiol., vol. 43, no.
10, pp. 2597–2603, Oct. 2018.
[119] M. L. Onozato, P. M. Andrews, Q. Li, J. Jiang, A. Cable, and Y. Chen, “Optical coherence
tomography of human kidney.,” J. Urol., 2010.
[120] W. Drexler, M. Liu, A. Kumar, T. Kamali, A. Unterhuber, and R. A. Leitgeb, “Optical
coherence tomography today: speed, contrast, and multimodality,” J. Biomed. Opt., vol.
19, no. 7, p. 071412, Jul. 2014.
[121] D. Huang et al., “Optical coherence tomography,” Science (80-. )., 1991.
[122] B. H. Bunch and A. Hellemans, The history of science and technology : a browser’s guide
to the great discoveries, inventions, and the people who made them, from the dawn of time
to today. Houghton Mifflin, 2004.
[123] “Tracking Solar Flares.” [Online]. Available: http://solar-
center.stanford.edu/SID/activities/ionosphere.html. [Accessed: 05-Mar-2019].
[124] J. F. de Boer, R. Leitgeb, and M. Wojtkowski, “Twenty-five years of optical coherence

166
tomography: the paradigm shift in sensitivity and speed provided by Fourier domain OCT
[Invited],” Biomed. Opt. Express, vol. 8, no. 7, p. 3248, Jul. 2017.
[125] M. Adhi and J. S. Duker, “Optical coherence tomography – current and future
applications,” Curr. Opin. Ophthalmol., vol. 24, no. 3, pp. 213–221, May 2013.
[126] A. C. Sull et al., “Comparison of spectral/Fourier domain optical coherence tomography
instruments for assessment of normal macular thickness,” Retina, 2010.
[127] C. V. Regatieri, L. Branchini, J. Carmody, J. G. Fujimoto, and J. S. Duker, “Choroidal
thickness in patients with diabetic retinopathy analyzed by spectral-domain optical
coherence tomography,” Retina, 2012.
[128] Y. Imamura, T. Fujiwara, R. Margolis, and R. F. Spaide, “Enhanced depth imaging optical
coherence tomography of the choroid in central serous chorioretinopathy,” Retina, 2009.
[129] Y. Wang, Y. Zhang, Z. Yao, R. Zhao, and F. Zhou, “Machine learning based detection of
age-related macular degeneration (AMD) and diabetic macular edema (DME) from optical
coherence tomography (OCT) images,” Biomed. Opt. Express, vol. 7, no. 12, p. 4928,
Dec. 2016.
[130] E. Sattler, R. Kästle, and J. Welzel, “Optical coherence tomography in dermatology,” J.
Biomed. Opt., vol. 18, no. 6, p. 061224, Jan. 2013.
[131] Y.-S. Hsieh et al., “Dental optical coherence tomography.,” Sensors (Basel)., vol. 13, no.
7, pp. 8928–49, Jul. 2013.
[132] M. J. Gora, M. J. Suter, G. J. Tearney, and X. Li, “Endoscopic optical coherence
tomography: technologies and clinical applications [Invited].,” Biomed. Opt. Express, vol.
8, no. 5, pp. 2405–2444, May 2017.
[133] D. Huang et al., “Optical coherence tomography.,” Science, vol. 254, no. 5035. pp. 1178–
81, 1991.
[134] R. C. Gonzalez and R. E. (Richard E. Woods, Digital image processing. Prentice Hall,
2008.
[135] M. S. Nixon and A. S. Aguado, “Feature extraction by shape matching,” in Feature
Extraction and Image Processing, 2013.
[136] J. M. S. Prewitt, “Object enhancement and extraction,” Pict. Process. Psychopictorics,
1970.
[137] I. Sobel, “NEIGHBORHOOD CODING OF BINARY IMAGES FOR FAST CONTOUR
FOLLOWING AND GENERAL BINARY ARRAY PROCESSING.,” Comput Graph.
Image Process, 1978.
[138] M. Reuter, S. Biasotti, D. Giorgi, and G. Patanè, “Discrete Laplace–Beltrami operators for
shape analysis and segmentation,” Comput. Graph., vol. 33, no. 3, pp. 381–390, Jun.
2009.
[139] T. Lindeberg, “Scale Selection Properties of Generalized Scale-Space Interest Point
Detectors,” J. Math. Imaging Vis., vol. 46, no. 2, pp. 177–210, Jun. 2013.
[140] Y. C. Hum, K. W. Lai, and M. I. Mohamad Salim, “Multiobjectives bihistogram

167
equalization for image contrast enhancement,” Complexity, vol. 20, no. 2, pp. 22–36, Oct.
2014.
[141] P. E. Trahanias and A. N. Venetsanopoulos, “Color image enhancement through 3-D
histogram equalization,” in Proceedings., 11th IAPR International Conference on Pattern
Recognition. Vol. IV. Conference D: Architectures for Vision and Pattern Recognition,
pp. 545–548.
[142] S. J. Bedros, “Edge Detection.” [Online]. Available:
http://www.me.umn.edu/courses/me5286/vision/VisionNotes/2017/ME5286-Lecture7-
2017-EdgeDetection2.pdf. [Accessed: 03-Jun-2019].
[143] J. Canny, “A Computational Approach to Edge Detection,” IEEE Trans. Pattern Anal.
Mach. Intell., vol. PAMI-8, no. 6, pp. 679–698, Nov. 1986.
[144] N. Otsu, “A Threshold Selection Method from Gray-Level Histograms,” IEEE Trans.
Syst. Man. Cybern., vol. 9, no. 1, pp. 62–66, Jan. 1979.
[145] M. A. Ayala-Garcia, M. A. P. Hernandez, E. J. Ramirez-Barba, and B. G. Yebra,
“Preservation of Renal Allografts for Transplantation,” Ren. Transplant., pp. 1–17, 2012.
[146] M. Kass, A. Witkin, and D. Terzopoulos, “Snakes: Active contour models,” Int. J.
Comput. Vis., vol. 1, no. 4, pp. 321–331, Jan. 1988.
[147] A. H. Seheult, D. . Greig, and B. T. Porteous;, “Exact Maximum A Posteriori Estimation
For Binary Images,” J. R. Stat. Soc., 1989.
[148] E. H. Adelson and J. R. Bergen, “The plenoptic function and the elements of early
vision.,” in Computational models of visual processing, 1991.
[149] Y. Boykov, O. Veksler, and R. Zabih, “Fast approximate energy minimization via graph
cuts,” IEEE Trans. Pattern Anal. Mach. Intell., 2001.
[150] R. Kafieh, H. Rabbani, and S. Kermani, “A review of algorithms for segmentation of
optical coherence tomography from retina.,” J. Med. Signals Sens., vol. 3, no. 1, pp. 45–
60, Jan. 2013.
[151] D. C. DeBuc, “A review of algorithms for segmentation of retinal image data using optical
coherence tomography,” Image Segmentation, 2011.
[152] M. R. Lee et al., “Optical coherence tomography for ophthalmic imaging - new technique
delivers micron-scale resolution.,” IEEE Eng. Med. Biol., 1995.
[153] Q. Yang et al., “Automated layer segmentation of macular OCT images using dual-scale
gradient information,” Opt. Express, 2010.
[154] D. C. Fernández, N. Villate, C. A. Puliafito, and P. J. Rosenfeld, “Comparing total
macular volume changes measured by Optical Coherence Tomography with retinal lesion
volume estimated by active contours. ,” Invest. Ophthalmol. Vis. Sci., 2004.
[155] A. Yazdanpanah, G. Hamarneh, B. Smith, and M. Sarunic, “Intra-retinal layer
segmentation in optical coherence tomography using an active contour approach,” in
Lecture Notes in Computer Science (including subseries Lecture Notes in Artificial
Intelligence and Lecture Notes in Bioinformatics), 2009.

168
[156] S. Yousefi, T. Liu, and R. K. Wang, “Segmentation and quantification of blood vessels for
OCT-based micro-angiograms using hybrid shape/intensity compounding.,” Microvasc.
Res., vol. 97, pp. 37–46, Jan. 2015.
[157] M. D. Abràmoff et al., “Automated segmentation of the cup and rim from spectral domain
OCT of the optic nerve head,” Investig. Ophthalmol. Vis. Sci., 2009.
[158] Yuri Boykov and Gareth Funka-Lea, “Graph Cuts and Efficient N-D Image
Segmentation,” Int. J. Comput. Vis., 2006.
[159] R. Kardon, Xiaodong Wu, M. Sonka, M. D. Abramoff, M. K. Garvin, and S. R. Russell,
“Intraretinal Layer Segmentation of Macular Optical Coherence Tomography Images
Using Optimal 3-D Graph Search,” IEEE Trans. Med. Imaging, 2008.
[160] P. M. Andrews, B. S. Khirabadi, and B. C. Bengs, “Using tandem scanning confocal
microscopy to predict the status of donor kidneys.,” Nephron, vol. 91, no. 1, pp. 148–55,
May 2002.
[161] M. Schmid, “Versatile Wand Tool.” ImageJ, 2015.
[162] A. Lubas et al., “Ultrasonic evaluation of renal cortex arterial area enables differentiation
between hypertensive and glomerulonephritis-related chronic kidney disease,” Int. Urol.
Nephrol., vol. 49, no. 9, pp. 1627–1635, 2017.
[163] H. Boom, M. J. K. Mallat, J. W. De Fijter, A. H. Zwinderman, and L. C. Paul, “Delayed
graft function influences renal function, but not survival,” Kidney Int., vol. 58, no. 2, pp.
859–866, 2000.
[164] B. Wang et al., “Optical coherence tomography and computer-aided diagnosis of a murine
model of chronic kidney disease,” J. Biomed. Opt., vol. 22, no. 12, pp. 1–11, 2017.
[165] Q. Li et al., “Automated quantification of microstructural dimensions of the human kidney
using optical coherence tomography (OCT).,” Opt. Express, vol. 17, no. 18, pp. 16000–16,
Aug. 2009.
[166] W. K. Tey, Y. C. Kuang, M. P.-L. Ooi, and J. J. Khoo, “Automated quantification of renal
interstitial fibrosis for computer-aided diagnosis: A comprehensive tissue structure
segmentation method,” Comput. Methods Programs Biomed., vol. 155, pp. 109–120, Mar.
2018.
[167] J. M. Street et al., “Automated quantification of renal fibrosis with Sirius Red and
polarization contrast microscopy.,” Physiol. Rep., vol. 2, no. 7, Jul. 2014.
[168] P. Sarder, B. G. Ginley, J. E. Tomaszewski, K.-Y. Jen, A. Fogo, and S. Jain,
“Computational analysis of the structural progression of human glomeruli in diabetic
nephropathy,” in Medical Imaging 2018: Digital Pathology, 2018.
[169] P. P. Srinivasan, S. J. Heflin, J. A. Izatt, V. Y. Arshavsky, and S. Farsiu, “Automatic
segmentation of up to ten layer boundaries in SD-OCT images of the mouse retina with
and without missing layers due to pathology,” Biomed. Opt. Express, 2014.
[170] Q. Dai and Y. Sun, “Automated layer segmentation of optical coherence tomography
images,” in Proceedings - 2011 4th International Conference on Biomedical Engineering
and Informatics, BMEI 2011, 2011.

169
[171] S. Lee et al., “Comparison of Outcomes of Living and Deceased Donor Kidney Grafts
Surviving Longer Than 5 Years in Korea,” Transplant. Proc., vol. 42, no. 3, pp. 775–777,
Apr. 2010.
[172] A. J. Matas et al., “2202 Kidney Transplant Recipients with 10 Years of Graft Function:
What Happens Next?,” Am. J. Transplant., vol. 8, no. 11, pp. 2410–2419, Nov. 2008.
[173] “Organ Donation and Transplantation Statistics | National Kidney Foundation.” [Online].
Available: https://www.kidney.org/news/newsroom/factsheets/Organ-Donation-and-
Transplantation-Stats. [Accessed: 06-Mar-2019].
[174] D. Healy, P. Daly, N. Docherty, and R. Watson, “Heat shock induced protection of renal
proximal tubular epithelial cells fom cold storage and rewarming injury,” J. Am. Soc.
Nephrol., vol. 17, no. 3, pp. 805–812, 2006.
[175] F. Belzer, B. S. Ashby, J. Huang, and J. E. Dunphy, “Etiology of Rising Perfusion
Pressure in Isolated Organ Perfusion,” Ann. Surg., vol. 168, no. 3, pp. 382–390.
[176] L. R. Requiao-Moura, M. de Souza Durao Junior, A. C. C. de Matos, and A. Pacheco-
Silva, “Ischemia and reperfusion injury in renal transplantation: hemodynamic and
immunological paradigms,” Einstein (Sao Paulo), vol. 13, no. 1, pp. 129–135, 2015.
[177] S. L. Linas, D. Whittenburg, P. E. Parsons, and J. E. Repine, “Ischemia increases
neutrophil retention and worsens acute renal failure: Role of oxygen metabolites and
ICAM 1,” Kidney Int., 1995.
[178] Y. Xia, P. Friedmann, C. Cortes, and M. Lubetzky, “Influence of Cold Ischemia Time in
Combination with Donor Acute Kidney Injury on Kidney Transplantation Outcomes,”
Elsevier, vol. 221, no. 2, pp. 532–538, 2015.
[179] J. M. Weinberg, M. A. Venkatachalam, N. Roeser, and I. Nissim, “Anaerobic and aerobic
pathways for salvage of proximal tubules from hypoxia-induced mitochondrial injury,”
Am. J. Ren. Physiol., vol. 279, no. 5, pp. F927–F943, 2000.
[180] A. Leaf, “Cell Swelling,” Circulation, vol. XLVIII, no. 3, pp. 455–458, 1973.
[181] M. J. Taylor, “Biology of Cell Survival in the Cold: The Basis for Biopreservation of
Tissues and Organs,” Adv. Biopreservation, pp. 15–62, 2006.
[182] E. L. Greene and M. S. Paller, “Calcium and free radicals in hypoxia/reoxygenation injury
of renal epithelial cells,” Am. Physiol. Soc., vol. 94, pp. F13–F20, 1994.
[183] S. L. Lindell, H. Muir, J. Brassil, and M. J. Mangino, “Hypothermic Machine Perfusion
Preservation of the DCD Kidney: Machine Effects,” J. Transplant., 2013.
[184] S. A. Hosgood, B. Yang, A. Bagul, I. H. Mohamed, and M. L. Nicholson, “A comparison
of hypothermic machine perfusion versus static cold storage in an experimental model of
renal ischemia reperfusion injury,” Transplantation, 2010.
[185] Z. Z. et al., “Hypothermic machine perfusion improves kidney viability through
alleviation of vasospasm and edema of sertoli cell and renal tubular epithelial cell,”
Transplantation, 2014.
[186] J. V Guarrera et al., “‘When good kidneys pump badly’: outcomes of deceased donor

170
renal allografts with poor pulsatile perfusion characteristics.,” Transpl. Int., vol. 23, no. 4,
pp. 444–6, Apr. 2010.
[187] D. Bon, N. Chatauret, S. Giraud, R. Thuillier, F. Favreau, and T. Hauet, “New strategies
to optimize kidney recovery and preservation in transplantation,” Nature Reviews
Nephrology. 2012.
[188] M. P. Van De Kerkhove et al., “Subnormothermic preservation maintains viability and
function in a porcine hepatocyte culture model simulating bioreactor transport,” Cell
Transplant., 2006.
[189] F. K. Port, R. M. Merion, E. C. Roys, and R. A. Wolfe, “Trends in Organ Donation and
Transplantation in the United States, 1997–2006,” Am. J. Transplant., vol. 8, no. 4p2, pp.
911–921, Apr. 2008.
[190] A. P. K. Lee and D. Abramowicz, “Is the Kidney Donor Risk Index a step forward in the
assessment of deceased donor kidney quality?,” Nephrol. Dial. Transplant., vol. 30, no. 8,
pp. 1285–1290, Aug. 2015.
[191] S. L. Nyberg et al., “Improved scoring system to assess adult donors for cadaver renal
transplantation.,” Am. J. Transplant, vol. 3, no. 6, pp. 715–21, Jun. 2003.
[192] S. L. Nyberg et al., “Donor scoring system for cadaveric renal transplantation.,” Am. J.
Transplant, vol. 1, no. 2, pp. 162–70, Jul. 2001.
[193] J. D. Schold, B. Kaplan, R. S. Baliga, and H.-U. Meier-Kriesche, “The broad spectrum of
quality in deceased donor kidneys.,” Am. J. Transplant, vol. 5, no. 4 Pt 1, pp. 757–65,
Apr. 2005.
[194] S. Ali and N. S. Sheerin, “Biomarkers of acute injury: predicting the long-term outcome
after transplantation,” Kidney Int., vol. 84, no. 6, pp. 1072–1074, Dec. 2013.
[195] R. F. Saidi et al., “Outcome of kidney transplantation using expanded criteria donors and
donation after cardiac death kidneys: realities and costs.,” Am. J. Transplant, vol. 7, no.
12, pp. 2769–74, Dec. 2007.
[196] A. Siedlecki, W. Irish, and D. C. Brennan, “Delayed graft function in the kidney
transplant.,” Am. J. Transplant, vol. 11, no. 11, pp. 2279–96, Nov. 2011.
[197] W. W.H., L. H.G., and P. R.J., “Brain death induced renal injury,” Curr. Opin. Organ
Transplant., 2011.
[198] S. G. Yarlagadda, S. G. Coca, R. N. Formica, E. D. Poggio, and C. R. Parikh,
“Association between delayed graft function and allograft and patient survival: a
systematic review and meta-analysis,” Nephrol. Dial. Transplant., vol. 24, no. 3, pp.
1039–1047, Oct. 2008.
[199] Z. Li, Q. Tang, L. Jin, P. M. Andrews, and Y. Chen, “Monitoring Kidney Microanatomy
Changes During Ischemia-Reperfusion Process Using Texture Analysis of OCT Images,”
IEEE Photonics J., vol. 9, no. 2, p. 4000110, Apr. 2017.
[200] P. M. Andrews et al., “High-resolution optical coherence tomography imaging of the
living kidney.,” Lab. Investig., vol. 88, no. 4, pp. 441–449, 2008.

171
[201] R. A. Risdon, J. C. Sloper, and H. E. De Wardener, “Relationship between renal function
and histological changes found in renal-biopsy specimens from patients with persistent
glomerular nephritis.,” Lancet (London, England), vol. 2, no. 7564, pp. 363–6, Aug. 1968.
[202] G. Remuzzi et al., “Early experience with dual kidney transplantation in adults using
expanded donor criteria. Double Kidney Transplant Group (DKG).,” J. Am. Soc.
Nephrol., vol. 10, no. 12, pp. 2591–8, Dec. 1999.
[203] R. B. Munivenkatappa et al., “The Maryland Aggregate Pathology Index: A Deceased
Donor Kidney Biopsy Scoring System for Predicting Graft Failure,” Am. J. Transplant.,
vol. 8, no. 11, pp. 2316–2324, Nov. 2008.
[204] S. Lovisa, M. Zeisberg, and R. Kalluri, “Partial Epithelial-to-Mesenchymal Transition and
Other New Mechanisms of Kidney Fibrosis.,” Trends Endocrinol. Metab., vol. 27, no. 10,
pp. 681–695, Oct. 2016.
[205] Y. Ovadya and V. Krizhanovsky, “A new Twist in kidney fibrosis,” Nat. Med., vol. 21,
no. 9, pp. 975–977, Sep. 2015.
[206] J. R. Schelling, “Tubular atrophy in the pathogenesis of chronic kidney disease
progression.,” Pediatr. Nephrol., vol. 31, no. 5, pp. 693–706, May 2016.
[207] M. L. Nicholson, E. Bailey, S. Williams, K. P. Harris, and P. N. Furness, “Computerized
histomorphometric assessment of protocol renal transplant biopsy specimens for surrogate
markers of chronic rejection.,” Transplantation, vol. 68, no. 2, pp. 236–41, Jul. 1999.
[208] R. L. Chevalier, “The proximal tubule is the primary target of injury and progression of
kidney disease: role of the glomerulotubular junction.,” Am. J. Physiol. Renal Physiol.,
vol. 311, no. 1, pp. F145-61, 2016.
[209] S. Cortell, F. J. Gennari, M. Davidman, W. H. Bossert, and W. B. Schwartz, “A definition
of proximal and distal tubular compliance. Practical and theoretical implications,” J. Clin.
Invest., vol. 52, no. 9, pp. 2330–2339, 1973.
[210] A. B. Maunsbach, G. H. Giebisch, and B. A. Stanton, “Effects of flow rate on proximal
tubule ultrastructure,” Am. J. Physiol. Physiol., vol. 253, no. 3, pp. F582–F587, Sep. 1987.
[211] J. V. Bonventre and L. Yang, “Cellular pathophysiology of ischemic acute kidney injury,”
J. Clin. Invest., vol. 121, no. 11, pp. 4210–4221, 2011.
[212] M. L. Onozato, P. M. Andrews, Q. Li, J. Jiang, A. E. Cable, and Y. Chen, “Optical
coherence tomography of human kidney.,” J. Urol., vol. 183, no. 5, pp. 2090–2094, 2010.
[213] J. Wierwille, P. Andrews, M. Onozato, and Y. Chen, “In Vivo, label-free, three-
dimensional quantitative imaging of kidney microcirculation using Doppler optical
coherence tomograpy (DOCT),” Lab Investig., vol. 91, no. 11, pp. 1596–1604, 2011.
[214] P. M Andrews and Y. Chen, “Using Optical Coherence Tomography (OCT) to Evaluate
Human Donor Kidneys Prior to and Following Transplantation,” J. Nephrol. Ther., vol.
04, no. 01, p. 1000151, Jan. 2014.
[215] W. D. Irish, J. N. Ilsley, M. A. Schnitzler, S. Feng, and D. C. Brennan, “A Risk Prediction
Model for Delayed Graft Function in the Current Era of Deceased Donor Renal
Transplantation,” Am. J. Transplant., vol. 10, no. 10, pp. 2279–2286, Sep. 2010.

172
[216] S. M. Flechner, J. Kobashigawa, and G. Klintmalm, “Calcineurin inhibitor-sparing
regimens in solid organ transplantation: focus on improving renal function and
nephrotoxicity.,” Clin. Transplant., vol. 22, no. 1, pp. 1–15, Jun. 2007.
[217] S. Yousefi, J. Qin, Z. Zhi, and R. K. Wang, “Label-free optical lymphangiography:
development of an automatic segmentation method applied to optical coherence
tomography to visualize lymphatic vessels using Hessian filters,” J. Biomed. Opt., vol. 18,
no. 8, p. 86004, 2013.
[218] P. Gong et al., “In vivo label-free lymphangiography of cutaneous lymphatic vessels in
human burn scars using optical coherence tomography,” Biomed. Opt. Express, vol. 7, no.
12, pp. 4886–4898, 2016.