OntheBoundarybetweenNonlinearJumpPhenomenonand ... · Gear axis Pinion axis I p θp (a) Zp Zg Og Op...
14
Hindawi Publishing Corporation Advances in Acoustics and Vibration Volume 2011, Article ID 583678, 13 pages doi:10.1155/2011/583678 Research Article On the Boundary between Nonlinear Jump Phenomenon and Linear Response of Hypoid Gear Dynamics Jun Wang 1 and Teik C. Lim 2 1 Advanced Components Systems Division, Caterpillar Inc., Peoria, IL 61630, USA 2 Mechanical Engineering Program, School of Dynamic Systems, University of Cincinnati, 598 Rhodes Hall, P.O. Box 210072, Cincinnati, OH 45221, USA Correspondence should be addressed to Teik C. Lim, [email protected] Received 27 October 2010; Revised 10 March 2011; Accepted 17 March 2011 Academic Editor: Mohammad Tawfik Copyright © 2011 J. Wang and T. C. Lim. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. A nonlinear time-varying (NLTV) dynamic model of a hypoid gear pair system with time-dependent mesh point, line-of-action vector, mesh stiffness, mesh damping, and backlash nonlinearity is formulated to analyze the transitional phase between nonlinear jump phenomenon and linear response. It is found that the classical jump discontinuity will occur if the dynamic mesh force exceeds the mean value of tooth mesh force. On the other hand, the propensity for the gear response to jump disappears when the dynamic mesh force is lower than the mean mesh force. Furthermore, the dynamic analysis is able to distinguish the specific tooth impact types from analyzing the behaviors of the dynamic mesh force. The proposed theory is general and also applicable to high-speed spur, helical and spiral bevel gears even though those types of gears are not the primary focus of this paper. 1. Introduction Gear dynamics have been studied intensively as evident from the discussions in [1–5]. In one of the earlier studies, Comparin and Singh investigated the nonlinear frequency response of an impact pair and located the transition condi- tions for no-impact, single-sided impact, and double-sided impact cases [1]. Later, Kahraman, and Singh examined the nonlinear dynamics of a spur gear pair [2] as well as a geared rotor-bearing system [3] and also studied the interaction between mesh stiffness and clearance nonlinearities [4]. More recently, Cheng and Lim studied the vibratory response of a hypoid geared rotor system with nonlinear time-varying mesh characteristics [5]. From those studies, it is now well known that nonlinear phenomena like jump discontinuity frequently occurs for lightly loaded gear pairs. As the drive load is progressively increased, the response becomes more linear until the jump response completely disappears. Understanding the conditions ahead of time when the geared system will exhibit nonlinear behaviors is highly desirable since the nonlinear dynamic analysis is typically very time consuming. However, to the best of our knowledge this transitional phase has never been studied extensively in the past or fully understood. Hence, the goal of this study is to seek out the conditions dictating the transitional boundary between nonlinear and linear responses. In other word, we would like to know precisely when jump phenomenon stops in advance as drive load goes from light to heavy. To assist in the above-mentioned analysis, a nonlinear time-varying dynamic model with time-dependent mesh position, line-of-action mesh vectors, mesh stiffness, mesh damping, and backlash nonlinearity is proposed similar to the one employed by the authors in earlier studies [6, 7]. Based on the model, different levels of torques and damping ratios are applied so that the transition condition between linear and nonlinear responses can be located. The analysis clearly shows that when the dynamic mesh force is greater than mean mesh force, the jump phenomena will occur. On the other hand, if the dynamic mesh force is smaller in value than the mean mesh force, the jump behavior tends to disappear making the response appearing to be quite linear. 2. Mathematical Model The two degrees-of-freedom (DOF) lumped parameter torsional vibration model of a hypoid gear pair as shown
Transcript of OntheBoundarybetweenNonlinearJumpPhenomenonand ... · Gear axis Pinion axis I p θp (a) Zp Zg Og Op...

Hindawi Publishing CorporationAdvances in Acoustics and VibrationVolume 2011, Article ID 583678, 13 pagesdoi:10.1155/2011/583678
Research Article
On the Boundary between Nonlinear Jump Phenomenon andLinear Response of Hypoid Gear Dynamics
Jun Wang1 and Teik C. Lim2
1 Advanced Components Systems Division, Caterpillar Inc., Peoria, IL 61630, USA2 Mechanical Engineering Program, School of Dynamic Systems, University of Cincinnati, 598 Rhodes Hall,P.O. Box 210072, Cincinnati, OH 45221, USA
Correspondence should be addressed to Teik C. Lim, [email protected]
Received 27 October 2010; Revised 10 March 2011; Accepted 17 March 2011
Academic Editor: Mohammad Tawfik
Copyright © 2011 J. Wang and T. C. Lim. This is an open access article distributed under the Creative Commons AttributionLicense, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properlycited.
A nonlinear time-varying (NLTV) dynamic model of a hypoid gear pair system with time-dependent mesh point, line-of-actionvector, mesh stiffness, mesh damping, and backlash nonlinearity is formulated to analyze the transitional phase between nonlinearjump phenomenon and linear response. It is found that the classical jump discontinuity will occur if the dynamic mesh forceexceeds the mean value of tooth mesh force. On the other hand, the propensity for the gear response to jump disappears whenthe dynamic mesh force is lower than the mean mesh force. Furthermore, the dynamic analysis is able to distinguish the specifictooth impact types from analyzing the behaviors of the dynamic mesh force. The proposed theory is general and also applicable tohigh-speed spur, helical and spiral bevel gears even though those types of gears are not the primary focus of this paper.
1. Introduction
Gear dynamics have been studied intensively as evidentfrom the discussions in [1–5]. In one of the earlier studies,Comparin and Singh investigated the nonlinear frequencyresponse of an impact pair and located the transition condi-tions for no-impact, single-sided impact, and double-sidedimpact cases [1]. Later, Kahraman, and Singh examined thenonlinear dynamics of a spur gear pair [2] as well as a gearedrotor-bearing system [3] and also studied the interactionbetween mesh stiffness and clearance nonlinearities [4].More recently, Cheng and Lim studied the vibratory responseof a hypoid geared rotor system with nonlinear time-varyingmesh characteristics [5]. From those studies, it is now wellknown that nonlinear phenomena like jump discontinuityfrequently occurs for lightly loaded gear pairs. As thedrive load is progressively increased, the response becomesmore linear until the jump response completely disappears.Understanding the conditions ahead of time when the gearedsystem will exhibit nonlinear behaviors is highly desirablesince the nonlinear dynamic analysis is typically very timeconsuming. However, to the best of our knowledge thistransitional phase has never been studied extensively in the
past or fully understood. Hence, the goal of this study is toseek out the conditions dictating the transitional boundarybetween nonlinear and linear responses. In other word, wewould like to know precisely when jump phenomenon stopsin advance as drive load goes from light to heavy.
To assist in the above-mentioned analysis, a nonlineartime-varying dynamic model with time-dependent meshposition, line-of-action mesh vectors, mesh stiffness, meshdamping, and backlash nonlinearity is proposed similar tothe one employed by the authors in earlier studies [6, 7].Based on the model, different levels of torques and dampingratios are applied so that the transition condition betweenlinear and nonlinear responses can be located. The analysisclearly shows that when the dynamic mesh force is greaterthan mean mesh force, the jump phenomena will occur.On the other hand, if the dynamic mesh force is smaller invalue than the mean mesh force, the jump behavior tends todisappear making the response appearing to be quite linear.
2. Mathematical Model
The two degrees-of-freedom (DOF) lumped parametertorsional vibration model of a hypoid gear pair as shown

2 Advances in Acoustics and Vibration
Ig
θg Tg
b
kmcm
∼ e
Tp
Gear axis
Pinion axis
Ip
θp
(a)
ZgZp
Og
Op
Xg
Xp
Yg
Yp
Gear axis
Pinion axis
(b)
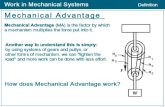
Figure 1: (a) Dynamic model of a hypoid gear pair, and (b) pinion and gear coordinate systems.
in Figure 1(a), which was also applied in earlier studies bythe authors [6, 7], is again assumed for the current study.This simplified representation is chosen over more complexsystem to allow for the study to focus on the behavior ofthe boundary between nonlinear jump phenomenon andlinear dynamic response. The pinion and gear bodies each areallowed to rotate only. The mesh coupling is represented by apair of mesh damping and stiffness elements. Using either theNewton’s or Lagrangian’s methods, the equations of motioncan be easily derived as
Ipθp + λpcmg(δ − e
)+ λpkm f (δ − e) = Tp, (1a)
Ig θg − λgcmg(δ − e
)− λgkm f (δ − e) = −Tg , (1b)
f (δ − e) =
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
(δ − e − b), δ − e ≥ b,
0, −b < δ − e < b,
(δ − e + b), δ − e ≤ −b,
(1c)
g(δ − e
)=
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
(δ − e
), δ − e ≥ b,
0, −b < δ − e < b,(δ − e
), δ − e ≤ −b,
(1d)
where Ip and Ig are the mass moments of inertias of pinionand gear, Tp and Tg are torque loads a on the pinion and gear,km and cm are mesh stiffness and mesh damping coefficients,e is unloaded kinematic transmission error, and 2b is the gearbacklash. The dynamic transmission error can be written asδ = λpθp − λgθg , while the directional rotation radius can be
expressed as λl =⇀nl · (
⇀r l ×
⇀j l) (l = p, g for pinion and gear
resp.). Also,⇀nl is the unit vector of the line of action along the
mesh force direction in the coordinate system Sl as shown in
Figure 1(b),⇀r l is the position vector of mesh point, and
⇀j l is
the unit vector along the rotating axes of pinion and gear.By assuming p = δ − e, (1a) and (1b) can be combined
and simplified into the following form:
me p + cmg(p)
+ km f(p) = me
(λpTp
Ip+λgTg
Ig− e
), (2a)
f(p) =
⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
p − b, p ≥ b,
0, −b < p < b,
p + b, p ≤ −b,
(2b)
g(p) =
⎧⎪⎨⎪⎩
0, −b < p < b,
p, else,(2c)
where me = 1/(λ2p/Ip + λ2
g /Ig). Since mesh damping is gen-erally time varying, proportional mesh damping is assumedhere, which is more realistic than simply applying constantdamping. Thus, the damping model can be expressed as
ζ = cm2√kmmem
= qkm2memωn
= qωn
2, (3)
cm = qkm = 2ζωn
km, (4)
where ωn =√kmm/mem, mem = 1/(λ2
pm/Ip + λ2gm/Ig).

Advances in Acoustics and Vibration 3
2.521.510.50
Dimensionless frequency
0
1
2
3
4
5
6
7
8
Dyn
amic
mes
hfo
rce
(ST
D)
(a)
2.521.510.50
Dimensionless frequency
0
1
2
3
4
5
6
7
8
Dyn
amic
mes
hfo
rce
(ST
D)
(b)
2.521.510.50
Dimensionless frequency
0
1
2
3
4
5
6
7
8
Dyn
amic
mes
hfo
rce
(ST
D)
(c)
2.521.510.50
Dimensionless frequency
0
1
2
3
4
5
6
7
8
Dyn
amic
mes
hfo
rce
(ST
D)
(d)
2.521.510.50
Dimensionless frequency
0
1
2
3
4
5
6
7
8
Dyn
amic
mes
hfo
rce
(ST
D)
(e)
2.521.510.50
Dimensionless frequency
0
1
2
3
4
5
6
7
8
Dyn
amic
mes
hfo
rce
(mea
n)
(f)
2.521.510.50
Dimensionless frequency
0
1
2
3
4
5
6
7
8
Dyn
amic
mes
hfo
rce
(mea
n)
(g)
2.521.510.50
Dimensionless frequency
0
1
2
3
4
5
6
7
8
Dyn
amic
mes
hfo
rce
(mea
n)
(h)
Figure 2: Continued.

4 Advances in Acoustics and Vibration
2.521.510.50
Dimensionless frequency
0
1
2
3
4
5
6
7
8
Dyn
amic
mes
hfo
rce
(mea
n)
(i)
2.521.510.50
Dimensionless frequency
0
1
2
3
4
5
6
7
8
Dyn
amic
mes
hfo
rce
(mea
n)
(j)
Figure 2: Dynamic mesh force response for different input torque loads. Dynamic mesh force (STD) is shown in (a) Tp = 0.99, (b) Tp = 1.37,
(c) Tp = 2.01, (d) Tp = 2.81, and (e) Tp = 3.27, while mean value is given by (f) Tp = 0.99, (g) Tp = 1.37, (h) Tp = 2.01, (i) Tp = 2.81, and
(j) Tp = 3.27. ∗: � no impact; •: © single-sided impact; +:�
double-sided impact; —–: dynamic mesh force (increasing frequency); . . .:dynamic mesh force (decreasing frequency); - - -: theoretical static mesh force.
The time-varying mesh parameters in (2a), (2b), and (2c)can be described as a superposition of a mean value and asinusoidal component as shown below:
λp = λpm + λpa cos(ωt + φp
),
λg = λgm + λga cos(ωt + φg
),
km = kmm + kma cos(ωt + φk
),
e = ea cos(ωt + φe
).
(5)
The dynamic mesh force can be computed from
Fd = cmg(p)
+ km f(p) = 2ζ
kmωn
g(p)
+ km f(p). (6)
From the torque and directional rotation radii, the meanvalue of the mesh force can be calculated from
Fs =Tp
λpm= Tg
λgm. (7)
By further assuming dimensionless parameters p = p/b,
t = ωnt, ω = ω/ωn, λp = λp/λpm, λg = λg/λgm, k = km/kmm,and e = e/b, the dimensionless form of (2a) can be obtainedas
p′′ + 2ζλ2p + ηλ 2
g
1 + ηkg(p′)
+λ2p + ηλ 2
g
1 + ηk f(p)
= Tpλp + Tg λg − e′′,
(8a)
f(p) =
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
p − 1, p ≥ 1,
0, −1 < p < 1,
p + 1, p ≤ −1,
(8b)
g(p′) =
⎧⎨⎩
0, −1 < p < 1,
p′, else,(8c)
where η = λ2gmIp/λ
2pmIg , Tp = λpmTp/bω2
nIp, and Tg = ηTp.The dimensionless mesh parameters are described as
λp = 1 + λpa cos(ωt + φp
),
λg = 1 + λga cos(ωt + φg
),
k = 1 + ka cos(ωt + φk
),
e = ea cos(ωt + φe
).
(9)
Subsequently the dimensionless dynamic mesh force can bederived as
Fd = 2ζkg(p′)
+ k f(p), (10)
and the dimensionless mean value mesh force can becalculated from
Fs =(1 + η
)Tp. (11)
The numerical integration method applying an explicitRunge-Kutta (4) and (5) formulation is employed to com-pute the response from (8a) since there is no analyticalmethod available. The computed time domain response pis then applied to calculate the dynamic mesh force using(10). From the predicted time history response function, thefrequency spectrum can be obtained by taking the standarddeviation (STD) and mean values of time series data at eachoperating frequency. From here onwards, the STD value isconsidered as the amplitude of dynamic mesh force.
3. Dynamic Analysis
Using the proposed dynamic model, a typical rear axlehypoid gear set is analyzed. The basic system parametersof this rear axle unit are given in Table 1, which were

Advances in Acoustics and Vibration 5
2.521.510.50
Dimensionless frequency
1.6
1.65
1.7
1.75
1.8
Dyn
amic
mes
hfo
rce
(mea
n)
(a)
2.521.510.50
Dimensionless frequency
2.25
2.3
2.35
2.4
2.45
Dyn
amic
mes
hfo
rce
(mea
n)
(b)
2.521.510.50
Dimensionless frequency
3.4
3.45
3.5
3.55
3.6
Dyn
amic
mes
hfo
rce
(mea
n)
(c)
2.521.510.50
Dimensionless frequency
4.8
4.85
4.9
4.95
5
Dyn
amic
mes
hfo
rce
(mea
n)
(d)
2.521.510.50
Dimensionless frequency
5.6
5.65
5.7
5.75
5.8
Dyn
amic
mes
hfo
rce
(mea
n)
(e)
Figure 3: Mean value of mesh force for different input torque loads. (a) Tp = 0.99, (b) Tp = 1.37, (c) Tp = 2.01, (d) Tp = 2.81, and (e)
Tp = 3.27.∗: � no impact; •:© single-sided impact; +:�
double-sided impact; —–: mean value for increasing frequency; . . .: mean valuefor decreasing frequency; - - -: theoretical static mesh force.
also applied in an earlier numerical study by the authors[6]. Tooth contact analysis is first conducted to obtain thenecessary mesh parameters for five different loads as shownin Table 2. The procedure for computing mesh parametersobtained from output results of a tooth contact analysis [8]is described in an earlier publication by the authors [9].The extracted mesh parameters are readily employed in thedynamic model. For brevity, details of the process will not berepeated here.
3.1. Frequency Domain Analysis. The dynamic mesh forceresponse calculated using the above procedure for differentmean loads is shown in Figure 2. Here mesh damping ratioof ζ = 0.04 is used. As expected, when the torque loadincreases, the mean value of mesh force increases too. Infact, the mean value of mesh force response is very closeto the theoretical static mesh force derived from the inputtorque load and is almost frequency invariant comparedto the dynamic mesh force that varies significantly with

6 Advances in Acoustics and Vibration
2.521.510.50
Dimensionless frequency
0
2
4
6
8
10
12
Dyn
amic
mes
hfo
rce
(ST
D)
(a)
2.521.510.50
Dimensionless frequency
0
2
4
6
8
10
12
Dyn
amic
mes
hfo
rce
(ST
D)
(b)
2.521.510.50
Dimensionless frequency
0
2
4
6
8
10
12
Dyn
amic
mes
hfo
rce
(ST
D)
(c)
2.521.510.50
Dimensionless frequency
0
2
4
6
8
10
12
Dyn
amic
mes
hfo
rce
(ST
D)
(d)
2.521.510.50
Dimensionless frequency
0
2
4
6
8
10
12
Dyn
amic
mes
hfo
rce
(mea
n)
(e)
2.521.510.50
Dimensionless frequency
0
2
4
6
8
10
12
Dyn
amic
mes
hfo
rce
(mea
n)
(f)
2.521.510.50
Dimensionless frequency
0
2
4
6
8
10
12
Dyn
amic
mes
hfo
rce
(mea
n)
(g)
2.521.510.50
Dimensionless frequency
0
2
4
6
8
10
12
Dyn
amic
mes
hfo
rce
(mea
n)
(h)
Figure 4: Dynamic mesh force response for different mesh damping ratios. Dynamic mesh force (STD) is shown in (a) ζ = 0.01, (b)ζ = 0.02, (c) ζ = 0.04, and (d) ζ = 0.08, while the mean value is given by (e) ζ = 0.01, (f) ζ = 0.02, (g) ζ = 0.04, and (h) ζ = 0.08. ∗: �no impact; •: © single-sided impact; +:
�double-sided impact; —–: dynamic mesh force (increasing frequency); . . .: dynamic mesh force
(decreasing frequency); - - -: theoretical static mesh force.

Advances in Acoustics and Vibration 7
2.521.510.50
Dimensionless frequency
3.35
3.4
3.45
3.5D
ynam
icm
esh
forc
e(m
ean
)
(a)
2.521.510.50
Dimensionless frequency
3.35
3.4
3.45
3.5
Dyn
amic
mes
hfo
rce
(mea
n)
(b)
2.521.510.50
Dimensionless frequency
3.35
3.4
3.45
3.5
Dyn
amic
mes
hfo
rce
(mea
n)
(c)
2.521.510.50
Dimensionless frequency
3.35
3.4
3.45
3.5
Dyn
amic
mes
hfo
rce
(mea
n)
(d)
Figure 5: Mean value of mesh force response for different mesh damping ratios. (a) ζ = 0.01, (b) ζ = 0.02, (c) ζ = 0.04, and (d) ζ = 0.08.∗:� no impact; •:© single-sided impact; +:
�double-sided impact; —–: mean value for increasing frequency; . . .: mean value for decreasing
frequency; - - -: theoretical static mesh force.
N3
f ( p)
N2 N1
S2 S1
D
−1 1
1
1
p
Figure 6: Illustration of different tooth impact types. No impact (N1, N2, and N3), single-sided impact (S1, S2), and double-sided impact(D).

8 Advances in Acoustics and Vibration
0.9
0.95
11.05
1.1
0.85
0.9
2.521.510.50
Dimensionless frequency
0
1
2
3
4
5
6
7
8
Dyn
amic
mes
hfo
rce
(ST
D)
Figure 7: Dynamic mesh force (STD) for Tp = 2.01. ∗, � noimpact; •, © single-sided impact; +:
�double-sided impact; —–:
dynamic mesh force (RMS) for increasing frequency; . . .: dynamicmesh force (RMS) for decreasing frequency; - - -: theoretical staticmesh force.
Table 1: System parameters for a typical automotive rear axlehypoid gear pair.
Number of pinion teeth 10
Number of gear teeth 43
Pinion offset (m) 0.0318
Gear pitch radius (m) 0.168
Pinion pitch radius (m) 0.048
Mass moment of inertia of pinion (kg-m2) 0.002
Mass moment of inertia of gear (kg-m2) 0.05
frequency. Also, the dynamic mesh force appears to decreasewith increasing input torque. A more in-depth analysis of thedynamic mesh force results are discussed next.
At Tp = 0.99, several jump discontinuities and veryrich single and double-sided tooth impacts can be observedat the primary resonance and higher frequencies. As Tp isincreased to 1.37, only two jumps are seen in which oneis a softening type (lower frequency) and the other is ahardening one (upper frequency). At the same time, lesstooth impacts occur around the primary resonance. For thecase of Tp = 2.01 only a softening type jump, and very fewsingle and double-sided tooth impact points appear near theprimary resonance. At Tp = 2.81 there is no jump responseobserved and only a single-sided tooth impact is found. AsTp is increased further to 3.27, the dynamic response overthe entire frequency range shown is completely void of jumpphenomenon and tooth impacts.
From the results, an interesting finding is that when thedynamic mesh force is greater than the mean value of meshforce or the theoretical static mesh force, jump discontinuitycan be seen. On the other hand, when the dynamic meshforce is lower than the mean value of mesh force or the
Table 2: Dimensionless dynamic parameters of a typical automo-tive rear axle hypoid gear pair.
Parameter symbols Numerical values
Tp 0.99 1.37 2.01 2.81 3.27
η 0.740 0.740 0.740 0.740 0.740
λpa1 0.015 0.014 0.010 0.006 0.004
φp1 0.25π 0.24π 0.22π 0.15π 0.05π
λga1 0.013 0.013 0.009 0.005 0.004
φg1 0.25π 0.24π 0.22π 0.15π 0.06π
ka 0.231 0.137 0.053 0.0462 0.0458
φk −0.33π −0.37π −0.57π −0.93π −0.98π
ea1 0.49 0.49 0.49 0.49 0.49
φe1 0.74π 0.74π 0.74π 0.74π 0.74π
theoretical static mesh force, virtually no jump discontinuityis seen. This is because the mean value of mesh force isable to keep the meshing teeth engaged all the time whenits magnitude is higher than the dynamic counterpart thattends to cause the meshing teeth to lose contact. The resultsof mean value of mesh force response for different levels ofinput torque load are shown as a closed-up view in Figure 3.Again, as seen in these results, as the drive torque load isincreased, the mean mesh force level increases. However, itsvariation decreases, yielding a more linear characteristic.
The effect of damping is analyzed next. Figure 4 showsthe dynamic mesh force response for different mesh dampingratios. From these plots, it can be seen that as ζ is increased,the dynamic mesh force tends to decrease, while mean valuedoes not change at all. This is consistent with the resultsdepicted in (11). At the same time, occurrence of jumpdiscontinuity and tooth impacts lessen. Also, the mean valueof mesh force is very close to the theoretical static mesh forceand changes very little. Similarly, the results again show thatas dynamic mesh force becomes larger than the mean valueof mesh force, jump response appears, while no evidence ofjump response is seen when the dynamic mesh force is lowerthan the mean value.
The effect of mesh damping on the mean value of meshforce is shown in Figure 5. Note that these plots represent aclosed-up view of the ones shown in Figure 4. Here, it canbe seen that as mesh damping ratio ζ is increased, the meanvalue changes very little and its variation tends to decrease.This former result is unlike the previously seen effect of drivetorque load, but the latter observation is the same as the trendof drive torque load effect.
3.2. Time Domain Analysis. Due to the design of backlash inthe hypoid gear set, there are three classes of tooth meshingcases that are no impact, single-sided impact, and double-sided impact as illustrated in Figure 6. The zone between −1and 1 is backlash zone. So there are three types of no impact(N1, N2, and N3), two types of single-sided impact (S1 andS2), and one type of double-sided impact (D). These tooth

Advances in Acoustics and Vibration 9
550500450400350300
Dimensionless time
−2
−1
0
1
2
4
6
8
Dyn
amic
resp
onse
(a)
750700650600550
Dimensionless time
−4
−2−1
012
4
6
8
10
12
Dyn
amic
resp
onse
(b)
750700650600550
Dimensionless time
−2−1
012
4
6
8
10
Dyn
amic
resp
onse
(c)
450400350300250
Dimensionless time
−101
5
10
Dyn
amic
resp
onse
(d)
650600550500
Dimensionless time
−2
−1
0
1
2
4
6
8
Dyn
amic
resp
onse
(e)
550500450400350300
Dimensionless time
0
1
2
3
4
5
6
Dyn
amic
mes
hfo
rce
(f)
750700650600550
Dimensionless time
−2
0
2
4
6
8
10
Dyn
amic
mes
hfo
rce
(g)
750700650600550
Dimensionless time
0
2
4
6
8
10
Dyn
amic
mes
hfo
rce
(h)
Figure 8: Continued.

10 Advances in Acoustics and Vibration
450400350300250
Dimensionless time
−2
0
2
4
6
8
Dyn
amic
mes
hfo
rce
(i)
650600550500
Dimensionless time
0
1
2
3
4
5
6
7
Dyn
amic
mes
hfo
rce
(j)
Figure 8: Time history plots of gear response for increasing mesh frequencies. Dynamic response: (a) ω = 0.9, (b) ω = 0.95, (c) ω = 1.0,(d) ω = 1.05, and (e) ω = 1.1. Dynamic mesh force: (f) ω = 0.9, (g) ω = 0.95, (h) ω = 1.0, (i) ω = 1.05, and (j) ω = 1.1.
impact behaviors were first reported by Comparin and Singhin 1989 [1] for parallel axis gears. For nonparallel axis gears,there are no known prior studies. The current study attemptsto fill this gap using the hypoid gear design as the examplecase. In the ensuing discussion, let us consider the predicteddynamic mesh force spectrum for Tp = 2.01 as shown inFigure 7.
For the case of Tp = 2.01 as shown in Figure 7, thetime history plots of dynamic response for increasing meshfrequencies from 0.9 to 1.1 are shown in a set of plots inFigure 8. In the plot given by Figure 8(a) for the case ofω = 0.9, the time history response shown is of type N1
where no tooth impact response occurs. The correspondingtime history plot of the dynamic mesh force at this frequencyis shown in Figure 8(f). From this figure, it is seen thatthe trough value of dynamic mesh force is above zero. Toexplain this observation, consider (10) and (8b) that show
the dynamic mesh force being dominated by k f ( p). Sincef ( p) is greater than zero for N1 type no impact response,the dynamic mesh force must therefore be greater than zero.Figures 8(b) and 8(g) for ω = 0.95 shows the time historyresponse of type D double-sided tooth impact behavior. Itshows that the trough value of dynamic mesh force reachesbelow zero because f ( p) is less than zero for p < −1.Figure 8(c) shows the time history of S1 type single-sidedtooth impact response at ω = 1.0, with the correspondingdynamic mesh force shown in Figure 8(h). Here, the troughvalue of dynamic mesh force is equal to zero because f ( p) =0 for −1 < p < 1. This is found to be similar for the timehistory plots of S1 type single-sided tooth impact responseand dynamic mesh force at ω = 1.05, as shown in Figures8(d) and 8(i), respectively. At ω = 1.1 as shown in Figures8(e) and 8(j), the response goes back to N1 type no toothimpact behavior.
Time history plots of dynamic response for decreasingmesh frequencies from 1.1 to 0.85 are shown in Figure 9. Inthis set of plots, Figure 9(a) shows time history of N1 type notooth impact response at ω = 1.1 and Figure 9(g) shows thecorresponding time history of dynamic mesh force in which
the trough value is above zero. As ω is decreased to 1.05, thegear response becomes S1 type single-sided tooth impact asdepicted by the time history response in Figures 9(b) and9(h) in which the trough value is equal to zero. Similar S1
type single-sided tooth impact response occurs at ω = 1.0 asshown in Figures 9(c) and 9(i). At ω = 0.95 and 0.9, double-sided tooth impacts occur and the trough value of dynamicmesh force reaches below zero as shown in Figures 9(d), 9(j),9(e), and 9(k), respectively. Note that the negative mesh forceimplies a reversal of its vector along the line of action due tothe tooth in question back-colliding with the preceding toothof the mating gear. As ω is further decreased to 0.85 givenby Figures 9(f) and 9(l), N1 type no tooth impact responseappears and the trough value of dynamic mesh force is wellabove zero.
From the above analysis, it is shown that for N1 type notooth impact case, the trough value of dynamic mesh forceis greater than zero; for S1 type single-sided tooth impactcase, the trough value of dynamic mesh force is equal tozero; and finally for D type double-sided tooth impact case,the trough value of dynamic mesh force reaches below zero.Furthermore, it can be concluded that for N2 type no toothimpact case (where no mesh contact at all), the dynamicmesh force will always be equal to zero; for N3 type no toothimpact case (where the tooth-tooth engagement happensbetween the current and preceding tooth of the mating gear),the peak value of dynamic mesh force will be less than zeroimplying a mesh vector in the opposite direction from theN1 case; for S2 type single-sided tooth impact case, the peakvalue of dynamic mesh force will be equal to zero since thecurrent tooth in question never makes contact with the toothon the mating gear it is designed to engage with.
4. Concluding Remarks
A nonlinear time-varying torsional vibration model of ahypoid gear pair system with time-dependent mesh point,line-of-action vector, mesh stiffness, mesh damping, andbacklash nonlinearity is formulated to study the condition

Advances in Acoustics and Vibration 11
650600550500
Dimensionless time
−2
−1
0
1
2
4
6
8
Dyn
amic
resp
onse
(a)
700650600550500
Dimensionless time
−101
5
10
Dyn
amic
resp
onse
(b)
500450400350300
Dimensionless time
−101
5
10
Dyn
amic
resp
onse
(c)
500450400350300
Dimensionless time
−4
−2−1
012
4
6
8
10
12
Dyn
amic
resp
onse
(d)
800750700650600
Dimensionless time
−4
−2−1
012
4
6
8
10
12
Dyn
amic
resp
onse
(e)
850800750700650600
Dimensionless time
−2
−1
0
1
2
4
6
8
Dyn
amic
resp
onse
(f)
650600550500
Dimensionless time
0
1
2
3
4
5
6
7
Dyn
amic
mes
hfo
rce
(g)
700650600550500
Dimensionless time
−2
0
2
4
6
8
Dyn
amic
mes
hfo
rce
(h)
Figure 9: Continued.

12 Advances in Acoustics and Vibration
500450400350300
Dimensionless time
0
2
4
6
8
10
Dyn
amic
mes
hfo
rce
(i)
500450400350300
Dimensionless time
−2
0
2
4
6
8
10
Dyn
amic
mes
hfo
rce
(j)
800750700650600
Dimensionless time
−4
−2
0
2
4
6
8
10
Dyn
amic
mes
hfo
rce
(k)
850800750700650600
Dimensionless time
0
1
2
3
4
5
Dyn
amic
mes
hfo
rce
(l)
Figure 9: Time history plots of gear response for decreasing mesh frequencies. Dynamic response: (a) ω = 1.1, (b) ω = 1.05, (c) ω = 1.0,(d) ω = 0.95, (e) ω = 0.9, and (f) ω = 0.85. Dynamic mesh force: (g) ω = 1.1, (h) ω = 1.05, (i) ω = 1.0, (j) ω = 0.95, (k) ω = 0.9, and (l)ω = 0.85.
dictating the boundary between nonlinear jump phenomenaand linear responses, that is, when jump discontinuity beginsto disappear as mean load is increased from light to heavylevels. An interesting finding is that when the dynamicmesh force exceeds the mean value of mesh force, jumpdiscontinuity will appear, but when the dynamic mesh forceis lower than the mean value of mesh force, jump response isless likely to occur.
Based on the time domain analysis results, it is shownthat for N1 type no tooth impact case, the trough value ofdynamic mesh force is greater than zero; for N2 type notooth impact case, the dynamic mesh force is always equalto zero; for N3 type no tooth impact case, the peak valueof dynamic mesh force is less than zero; for S1 type single-sided tooth impact case, the trough value of dynamic meshforce is equal to zero; for S2 type single-sided tooth impactcase, the peak value of dynamic mesh force is equal to zero;for D type double-sided tooth impact case, the dynamicmesh force reaches both above and below zero. From theseobservations, it is clear that different tooth impact typescan be distinguished by the dynamic mesh force responsebehavior.
Nomenclature
b: Gear backlashcm: Mesh damping coefficiente: Unloaded kinematic transmission errorf : Nonlinear displacement functionIp, Ig : Mass moments of inertias of pinion and gear⇀j l: Unit vector along pinion or gear rotating axisk, km: Mesh stiffnessme: Equivalent mass⇀nl: Unit normal vector of mesh pointp: Difference between dynamic and kinematic
transmission errors⇀r l: Position vector of mesh pointSl: Coordinate system for dynamic formulationt: TimeTp, Tg : Mean value of pinion and gear torque loadsδ: Dynamic transmission errorλl: Directional rotation radiusω: Excitation frequency

Advances in Acoustics and Vibration 13
ζ : Mesh damping ratioη: Dimensionless torque ratioφ: Phase angle.
Subscripts
l: Label for pinion (l = p) and gear (l = g)a: Fundamental harmonicm: Meann: Natural.
Superscripts
∼: Dimensionless quantities→ : Vector quantities′: Derivative with respect to time.
References
[1] R. J. Comparin and R. Singh, “Non-linear frequency responsecharacteristics of an impact pair,” Journal of Sound andVibration, vol. 134, no. 2, pp. 259–290, 1989.
[2] A. Kahraman and R. Singh, “Non-linear dynamics of a spurgear pair,” Journal of Sound and Vibration, vol. 142, no. 1, pp.49–75, 1990.
[3] A. Kahraman and R. Singh, “Non-linear dynamics of a gearedrotor-bearing system with multiple clearances,” Journal ofSound and Vibration, vol. 144, no. 3, pp. 469–506, 1991.
[4] A. Kahraman and R. Singh, “Interactions between time-varyingmesh stiffness and clearance non-linearities in a geared system,”Journal of Sound and Vibration, vol. 146, no. 1, pp. 135–156,1991.
[5] Y. Cheng and T. C. Lim, “Dynamics of hypoid gear transmissionwith nonlinear time-varying mesh characteristics,” Journal ofMechanical Design, Transactions of the ASME, vol. 125, no. 2,pp. 373–382, 2003.
[6] J. Wang, T. C. Lim, and M. Li, “Dynamics of a hypoid gear pairconsidering the effects of time-varying mesh parameters andbacklash nonlinearity,” Journal of Sound and Vibration, vol. 308,no. 1-2, pp. 302–329, 2007.
[7] J. Wang and T. C. Lim, “Effect of tooth mesh stiffnessasymmetric nonlinearity for drive and coast sides on hypoidgear dynamics,” Journal of Sound and Vibration, vol. 319, no.3-5, pp. 885–903, 2009.
[8] S. Vijayakar, Contact Analysis Program Package: Calyx,Advanced Numerical Solutions, Hilliard, Ohio, 2003.
[9] T. C. Lim and J. Wang, “Effects of assembly errors on hypoidgear mesh and dynamic response,” in Proceedings of the ASMEPower Transmission and Gearing Conference (DETC ’05), LongBeach, Calif, USA, 2005.

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttp://www.hindawi.com Volume 2010
RoboticsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Journal ofEngineeringVolume 2014
Submit your manuscripts athttp://www.hindawi.com
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Modelling & Simulation in EngineeringHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
DistributedSensor Networks
International Journal of