
On Map-Matching Vehicle Tracking Data. Outline Authors Errors in the data Incremental MM Algorithm...
19
On Map-Matching Vehicle Tracking Data
-
Upload
hilary-hoover -
Category
Documents
-
view
215 -
download
0
Transcript of On Map-Matching Vehicle Tracking Data. Outline Authors Errors in the data Incremental MM Algorithm...

On Map-Matching Vehicle Tracking Data

Outline
• Authors• Errors in the data• Incremental MM Algorithm• Global MM Algorithm• Quality Measures• Performance• Conclusion• Q&A

Authors
• Sotiris Brakatsoulas – RA Computer Technology Institute(RACTI)
• Dieter Pfoser - RA Computer Technology Institute
• Randall Salas - Department of Computer Science University of Texas at San Antonio
• Carola Wenk - Department of Computer Science University of Texas at San Antonio
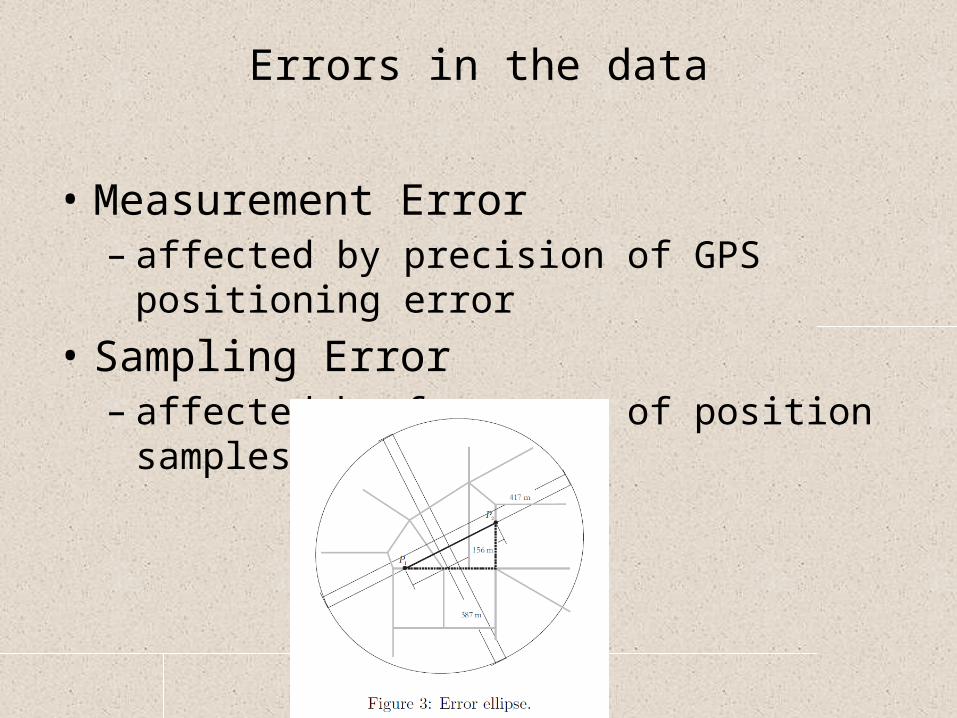
Errors in the data
• Measurement Error– affected by precision of GPS positioning error
• Sampling Error– affected by frequency of position samples

Errors in the data

Incremental MM Algorithm
• Position-by-position, edge-by-edge strategy to map-matching
• Consider distance and angle

Incremental MM Algorithm
• Local Look-Ahead Alg

Global MM Algorithm
• Try to find a curve in the road network that is as close as possible to the vehicle trajectory
• Curves are compared using Fréchet distance and Weak Fréchet distance
• Minimize over all possible curves in the road network

Fréchet distance
• Fréchet distance of the curves:minimal leash length necessary for both to walk the curves from beginning to end

Fréchet distance
• Fréchet distance
– f, g : 2 curves – where α and β range over continuous non-decreasing
reparametrizations only• Weak Fréchet Distance– – Drop the requirement on α and β range over
continuous non-decreasing reparametrizations only–

Freespace Diagram
• Decision variant of the global map-matching problem– for a fixed ε > 0 decide whether there exists a path
in the road network g with distance at most ε to the vehicle trajectory f
– https://www.youtube.com/watch?v=E9eI97vv1as

Freespace Surface
– Glue Freespace Diagram together– Freespace surface of trajectory α and the
graph G

Freespace Surface
• Work: Find monotone path in free space surface– starting in some lower left corner, and– ending in some upper right corner

Quality Measures• Comparing Fréchet distance of original and matched trajectory• Fréchet distances strongly affected by outliers, since they take the
maximum over a set of distances.
• How to fix it? Replace the maximum with a path integral over the reparametrization curve (α(t),β(t)):
average Fréchet distance
– Remark: Dividing by the arclength of the reparametrization curve yields a normalization, and hence an average of all distances.
, :[0,1] [0,1]( , )
( , ) : inf ( ( )) ( ( ))F f g f t g t
, :[0,1] [0,1] [0,1]( , ) : inf max ( ( )) ( ( ))F tf g f t g t
Quality Measures
• However, we do not know how to compute this integral.
• Approximate integral by sampling the curves and computing a sum instead of an integral.

Performance
• Running Time:

Performance
• Data– GPS vehicle tracking data
• 45 trajectories (~4200 GPS points)
• sampling rate 30 seconds
– Road network data• vector map of Athens, Greece
(10 x 10km)
• Evaluating matching quality– results from incremental vs. global method– Fréchet distance vs. averaged Fréchet distance (worst-case vs.
average measure)(Fréchet vs. Weak Fréchet distance produces same matching result)

Performance
• Empirical Evaluation

Conclusion
• Offline map-matching algorithms– Fréchet distance based algorithm vs. incremental
algorithm– accuracy vs. speed– no difference between Fréchet and weak Fréchet
algorithms in terms of matching results (data dependent)
• Matching quality– Fréchet distance strict measure– Average Fréchet distance tolerates outliers


















