
5 modal split-traffic assignment-( Transportation and Traffic Engineering Dr. Sheriff El-Badawy )
Upload
trec-at-psuCategory
view
240download
1
On–line Calibration for Dynamic TrafficAssignment
Constantinos Antoniou
October 5, 2007
Seminar at Portland State University

Constantinos Antoniou October 5, 2007
Outline
• Introduction
• Formulation
• Solution approaches
• Case study
• Directions for further research
• A glimpse at ongoing research
Seminar at Portland State University 1

!"#$%&'!"#$%&'!"#$%&'!"#$%&'DYnamic Network Assignment
for the Management of Information to Travelers
!"#$%&'!"#$%&'!"#$%&'!"#$%&'!"#$%&'!"#$%&'!"#$%&'!"#$%&' ()*$()*$()*$()*$()*$()*$()*$()*$
)(+, $.(/#01$)23
42$ 0.(+2*)").2+
5423(6.(#7*.4$88(6
54/9(3(#7*.4$92 *(#8/4+$.(/#

DynaMIT GUI

:(+, $.(/#:(+, $.(/#:(+, $.(/#:(+, $.(/#:(+, $.(/#:(+, $.(/#:(+, $.(/#:(+, $.(/#
!!2+$#3; %(64/*)(+, $./4; !25$4.,42*.(+2*6</(62; =/,.2*6</(62; =2)5/#)2*./*&':; >4(7(#032).(#$.(/#*8 /?)
!:,55 "; %2)/)6/5(6 '4$88(6*)(+, $./4
=2$ =2$ =2$ =2$ =2$ =2$ =2$ =2$ 00000000'(+2'(+2'(+2'(+2'(+2'(+2'(+2'(+2
!@/#.(#,/,)*3$.$*6/ 26.(/#!A$).*54/62))(#7
; B$).C >4(7(#$ "*32)(7#23*$)*3().4(1,.23*)/8.?$42
; B42)2#.C D+/#/ (.<(6E; A,.,42C 5$4$ 2 (F$.(/#*288/4.)*,#324?$"
"Processors no longer getting faster, but adding cores
! &++23($.2*3())2+(#$.(/#
'4$88(6*5423(6.(/#'4$88(6*5423(6.(/#'4$88(6*5423(6.(/#'4$88(6*5423(6.(/#'4$88(6*5423(6.(/#'4$88(6*5423(6.(/#'4$88(6*5423(6.(/#'4$88(6*5423(6.(/#
! =/ (#7*</4(F/#! @/#)().2#6"

=/ (#7*G/4(F/#=/ (#7*G/4(F/#=/ (#7*G/4(F/#=/ (#7*G/4(F/#=/ (#7*G/4(F/#=/ (#7*G/4(F/#=/ (#7*G/4(F/#=/ (#7*G/4(F/#
!"#$%&'!"#$%&'!"#$%&'!"#$%&'!"#$%&'!"#$%&'!"#$%&'!"#$%&' 6/#).$#. "*5423(6.)*.4$88(6*6/#).$#. "*5423(6.)*.4$88(6*6/#).$#. "*5423(6.)*.4$88(6*6/#).$#. "*5423(6.)*.4$88(6*6/#).$#. "*5423(6.)*.4$88(6*6/#).$#. "*5423(6.)*.4$88(6*6/#).$#. "*5423(6.)*.4$88(6*6/#).$#. "*5423(6.)*.4$88(6*6/#3(.(/#)*8/4*$*5426/#3(.(/#)*8/4*$*5426/#3(.(/#)*8/4*$*5426/#3(.(/#)*8/4*$*5426/#3(.(/#)*8/4*$*5426/#3(.(/#)*8/4*$*5426/#3(.(/#)*8/4*$*5426/#3(.(/#)*8/4*$*54200000000)526(8(23*.(+2*524(/3)526(8(23*.(+2*524(/3)526(8(23*.(+2*524(/3)526(8(23*.(+2*524(/3)526(8(23*.(+2*524(/3)526(8(23*.(+2*524(/3)526(8(23*.(+2*524(/3)526(8(23*.(+2*524(/3
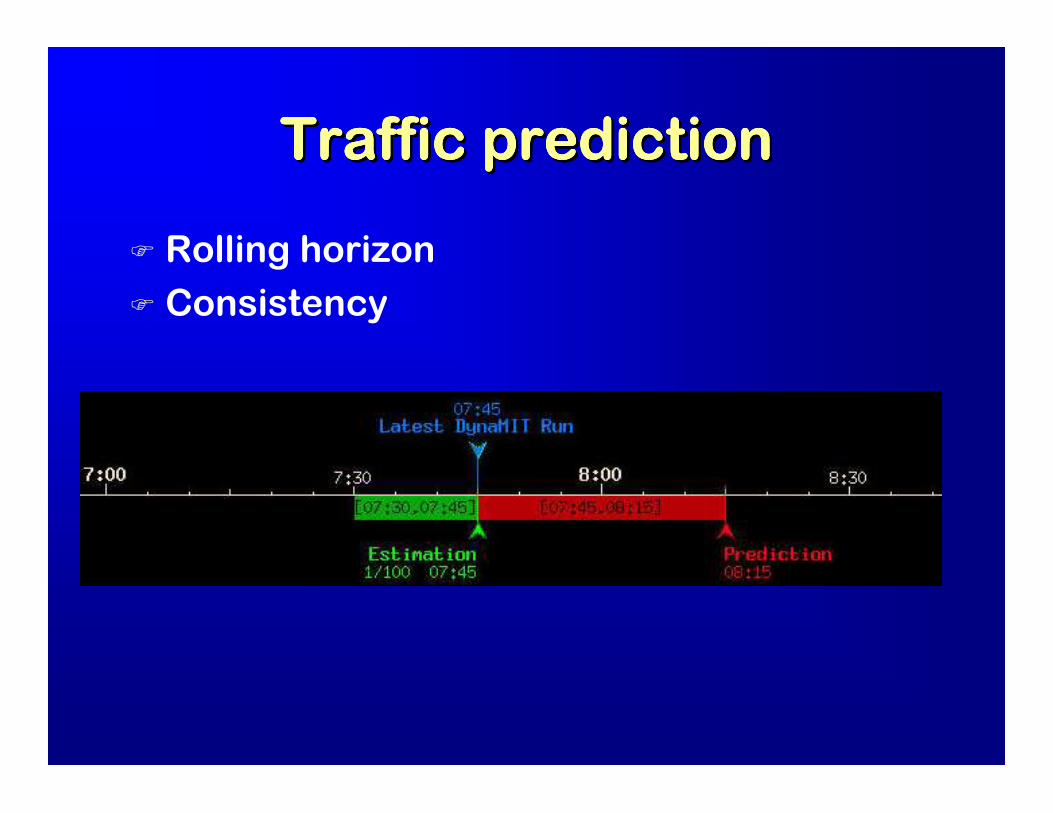
8:007:55 9:00
Estimation PredictionRunning
time
8:007:55 9:00
Estimation PredictionRunning
time
8:07
8:07
9:07
At 8:00
At 8:07

Broadcasting forecasts does not affect the weather
But with traffic…

DynaMIT Evaluation
MITSIM
Surveillance System
DynaMIT
Information
%2$),42)/8
28826.(92#2))

!"#$%&'!"#$%&'C*H2.?/4I*=2542)2#.$.(/#C*H2.?/4I*=2542)2#.$.(/#
!"#$%&'!"#$%&'
>924$
A4$+2?/4I
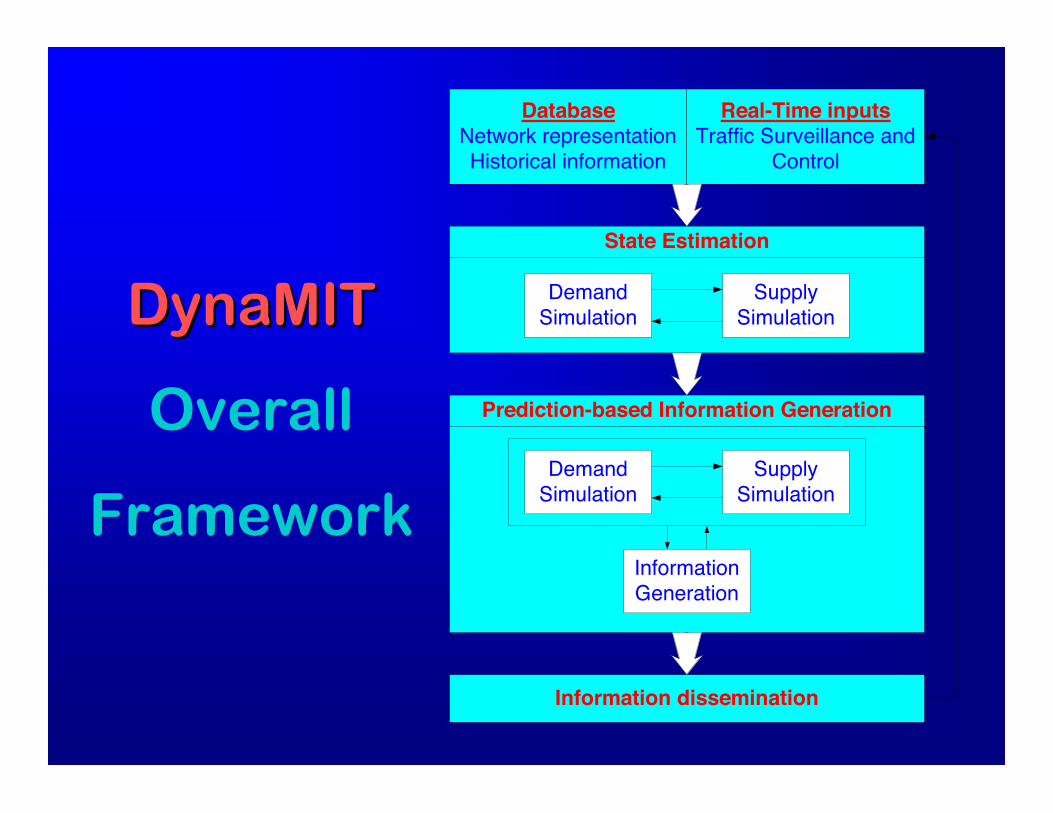
Information dissemination
DatabaseNetwork representationHistorical information
Real-Time inputsTraffic Surveillance and
Control
State Estimation
DemandSimulation
SupplySimulation
Prediction-based Information Generation
InformationGeneration
DemandSimulation
SupplySimulation

Constantinos Antoniou October 5, 2007
On–line DTA framework
Demand
simulator
Supply simulator
State estimation and model calibration
Network representation
Historical data
A-priori
parameter
values
Surveillance
information
Demand
simulator
Supply simulator
State prediction
Network
performance
Seminar at Portland State University 2

Constantinos Antoniou October 5, 2007
Motivation• Models/components
– Demand–side! OD flows! Behavioral models (e.g. route choice)
– Supply–side
! Speed–density relationship (e.g. u = uf
[1 !
(max(0,K!Kmin)
Kjam
)!]"
· where u denotes the speed, uf is the free flow speed, K is thedensity, Kmin is the minimum density, Kjam is the jam density and" and ! are model parameters.)
! Segment capacities
• Existing state estimation and model calibration approaches include subsetof these models
Seminar at Portland State University 3
Constantinos Antoniou October 5, 2007
Literature review
• Demand parameters
– OD estimation [Ashok and Ben–Akiva (1993, 2000)]
• Supply parameters
– Capacity estimation [van Arem and van der Vlist (1992)]
– Estimation of dynamic speed–density functions [Tavana andMahmassani (2000), Huynh et al. (2002), Qin and Mahmassani(2004)]
– Tra!c state estimation in freeway stretches [Wang and Papageorgiou(2005, 2007)]
Seminar at Portland State University 4

Constantinos Antoniou October 5, 2007
Research objectives
• Develop an integrated approach for on–line calibration that
– Jointly estimates and predicts demand and supply parameters
– Is general and flexible! Not tied to a particular DTA system
! Applicable to any calibration parameters
! Can exploit any available information
– Is computationally feasible
• Demonstrate the feasibility of the approach
Seminar at Portland State University 5

Constantinos Antoniou October 5, 2007
Inputs and outputs
On-line
calibration
A priori
parameter
values
Surveillance
data
Historical
data
On-line calibrated
parameters
Seminar at Portland State University 6

Constantinos Antoniou October 5, 2007
Formulation
• State–space model
– State vector
– Measurement equations
– Transition equations
• Idea of deviations
Seminar at Portland State University 7

Constantinos Antoniou October 5, 2007
State vector
• Deviations #!h of model inputs and parameters !h from availableestimates
#!h = !h ! !Hh
• State vector includes
– OD flows xijh: number of vehicles departing from origin i towardsdestination j during time interval h
– Model parameters, e.g.! route choice model parameters
! speed–density relationship parameters
! segment capacities
Seminar at Portland State University 8

Constantinos Antoniou October 5, 2007
Measurement equations (I)
• Direct measurement equation
!ah = !h + vh
• In deviations’ form (subtracting !Hh from both sides)
!ah ! !H
h = !h ! !Hh + vh !
#!ah = #!h + vh
where
– a denotes a priori values, H indicates historical estimates, vh is arandom error vector.
Seminar at Portland State University 9

Constantinos Antoniou October 5, 2007
Measurement equations (II)• Indirect measurement equation
Mh = S(!h
)+ "h
• In deviations’ form (subtracting MHh from both sides)
Mh ! MHh = S
(!h
)! MH
h + "h !
#Mh = S(!H
h + #!h
)! MH
h + "h
where
– Mh is a vector of measurements for interval h, and "h is a randomerror vector.
– S is the simulator function mapping the state to the measurements(no analytic expression).
Seminar at Portland State University 10

Constantinos Antoniou October 5, 2007
Transition equations
!h+1 =h"
q=h!p
Fh+1q · !q + #h
• In deviations’ form (subtracting !H for appropriate interval from bothsides)
!h+1 ! !Hh+1 =
h"
q=h!p
Fh+1q
(!q ! !H
q
)+ #h !
#!h+1 =h"
q=h!p
Fh+1q · #!q + #h
where
– Fh+1q is a transition matrix of e"ects of #!q on #!h+1
– p is the degree of the autoregressive process, and– #h is a random error vector
Seminar at Portland State University 11

Constantinos Antoniou October 5, 2007
The model at a glance
#!ah = #!h + vh
#Mh = S(!H
h + #!h
)! MH
h + "h
#!h+1 =h"
q=h!p
Fh+1q · #!q + #h
Seminar at Portland State University 12

Constantinos Antoniou October 5, 2007
Solution approaches
• Linear models
– Kalman Filter (KF)
• Non–linear models
– Extended Kalman Filter (EKF)– Limiting Extended Kalman Filter (LimEKF)– Unscented Kalman Filter (UKF)
Seminar at Portland State University 13

Constantinos Antoniou October 5, 2007
Kalman Filtering principles
• Prediction–correction approach
1. Predict a priori state for interval h (using information up to h ! 1)
2. Compute Kalman gain matrix
3. Combine Kalman gain and surveillance from interval h to correct stateprediction for interval h
Seminar at Portland State University 14

Constantinos Antoniou October 5, 2007
Extended Kalman Filter
• Extension of Kalman Filter for non–linear models
– First order Taylor expansion approximation
• Can use numerical derivatives, if no analytical relationship exists (formeasurement equations)
– Large number of function evaluations is required– e.g. 2n evaluations if central di"erences are used (n is state dimension)
• Computation of Kalman gain most “expensive” operation
Seminar at Portland State University 15

Constantinos Antoniou October 5, 2007
Limiting Extended Kalman Filter
• Use a pre–computed Kalman gain
– E.g.: (weighted) average of Kalman gains (computed o"–line)– No need to compute the Kalman gain on–line
• Only a single function evaluation is required on–line
• Can run EKF o"–line and periodically re–compute Kalman gain
Seminar at Portland State University 16

Constantinos Antoniou October 5, 2007
Unscented Kalman Filter
• Uses Unscented Transformation
– The state mean and covariance are used to generate 2n + 1 sigmapoints (n is the dimension of the state)
– These points are propagated through the true nonlinearity
• Kalman gain is computed from the state and measurement covariances
• No limiting version is possible
– Mean measurement vector (from 2n + 1 replications) is required forthe correction stage
Seminar at Portland State University 17

Constantinos Antoniou October 5, 2007
Case study — Objectives
• Demonstrate feasibility of the on–line calibration approach
• Verify importance of on–line calibration
– Impact of joint estimation and prediction of demand and supplyparameters
• Test candidate algorithms based on several criteria
– Performance/Fit (estimation and prediction)– Computational properties– Robustness
Seminar at Portland State University 18

Constantinos Antoniou October 5, 2007
The DynaMIT–R system
• State–of–the–art, simulation–based DTA system
– Transportation network and supply characteristics– OD demand and travel behavior
• Operates in rolling horizon for:
– Real–time estimation of network performance– Short–term prediction of future network conditions– Generation of tra!c information
• Inputs
– A-priori OD flows– Route choice parameters– Tra!c dynamics models’ parameters– Segment capacities
Seminar at Portland State University 19
Constantinos Antoniou October 5, 2007
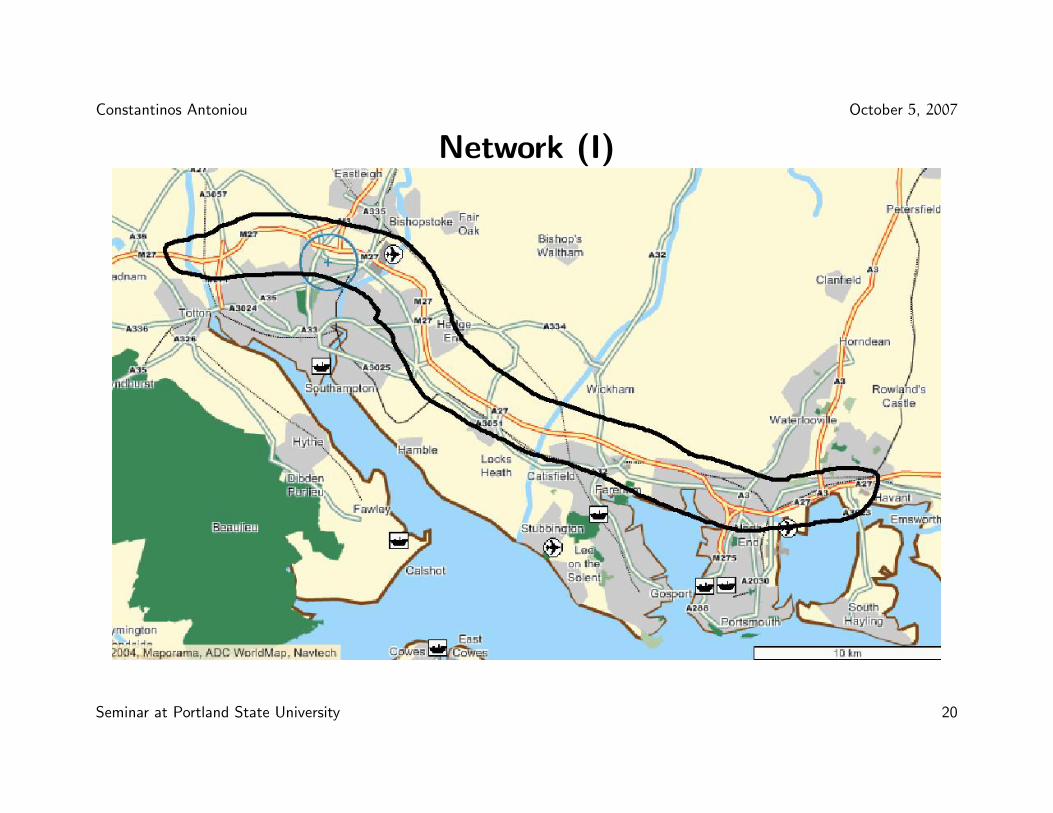
Network (I)
Seminar at Portland State University 20
Constantinos Antoniou October 5, 2007
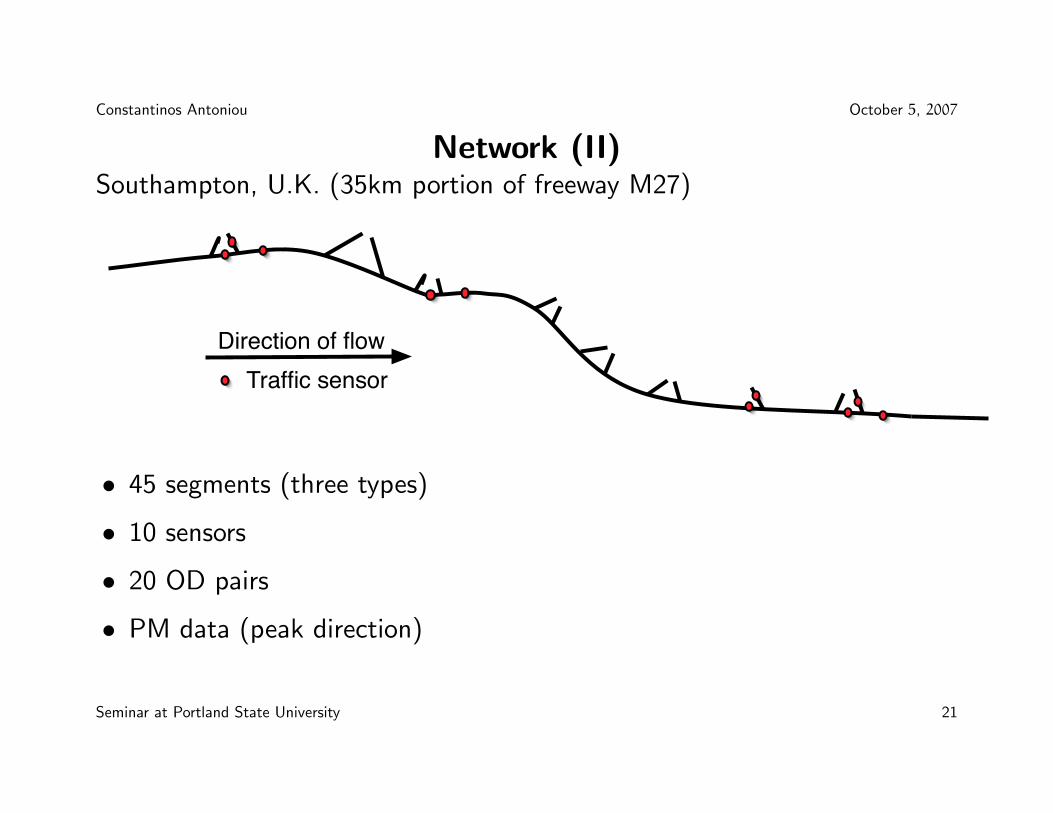
Network (II)Southampton, U.K. (35km portion of freeway M27)
Direction of flow
Traffic sensor
• 45 segments (three types)
• 10 sensors
• 20 OD pairs
• PM data (peak direction)
Seminar at Portland State University 21

Constantinos Antoniou October 5, 2007
Traffic flow characteristics
Seminar at Portland State University 22
Constantinos Antoniou October 5, 2007
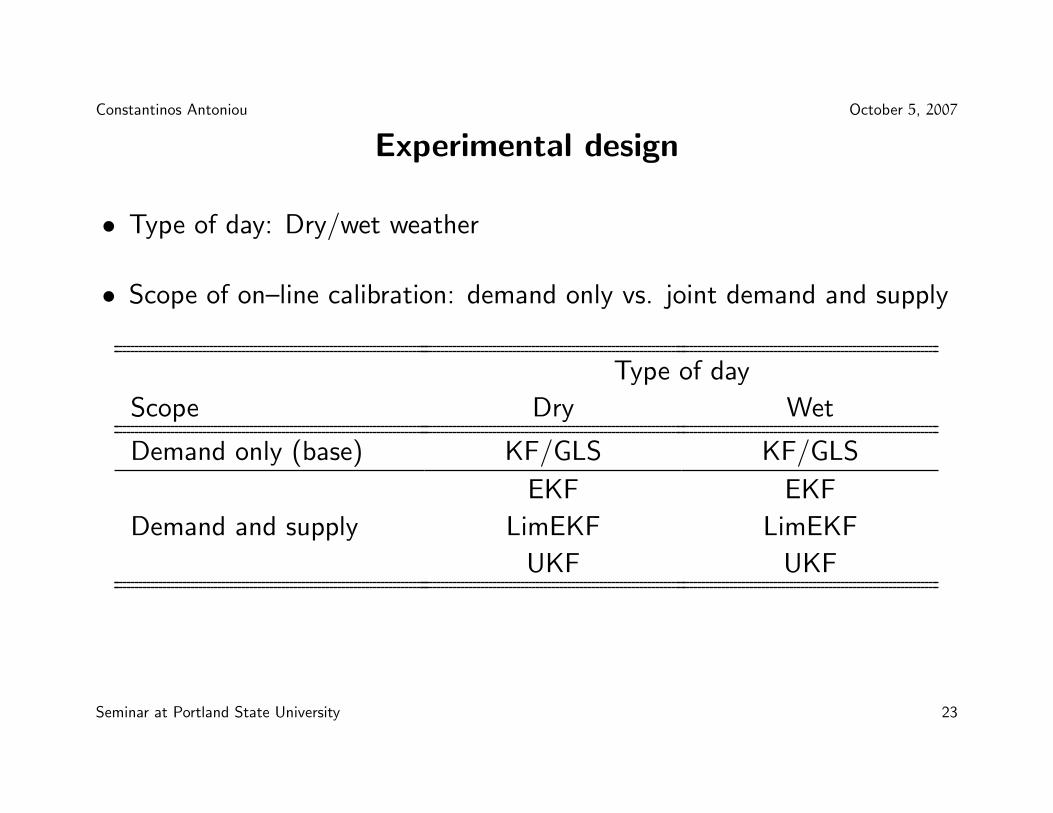
Experimental design
• Type of day: Dry/wet weather
• Scope of on–line calibration: demand only vs. joint demand and supply
Type of day
Scope Dry Wet
Demand only (base) KF/GLS KF/GLS
EKF EKF
Demand and supply LimEKF LimEKF
UKF UKF
Seminar at Portland State University 23

Constantinos Antoniou October 5, 2007
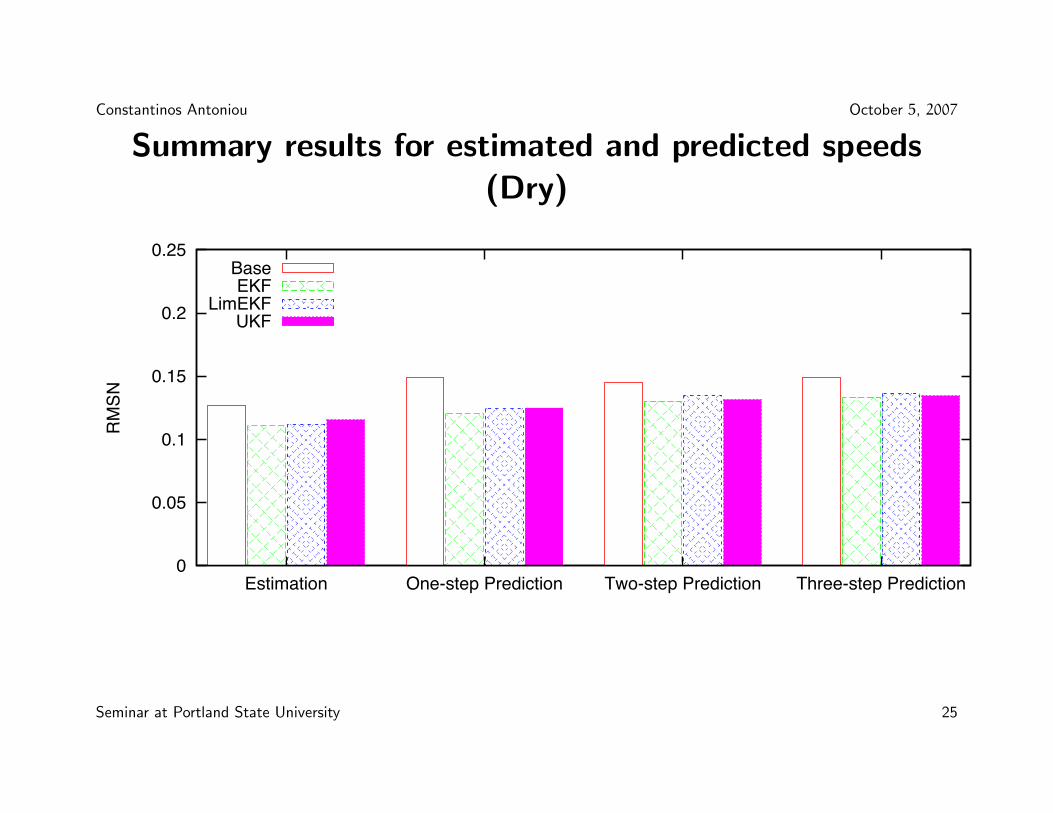
Measures of effectiveness
1. Fit of estimated/predicted vs. observed speeds
2. Fit of estimated/predicted vs. observed sensor counts
• Aggregate statistic: Normalized root mean square error (RMSN)
RMSN =
√N"
#n=1:N(yn ! yn)2
#n=1:N yn
3. Computational performance
Seminar at Portland State University 24
Constantinos Antoniou October 5, 2007
Summary results for estimated and predicted speeds(Dry)
0
0.05
0.1
0.15
0.2
0.25
Three-step PredictionTwo-step PredictionOne-step PredictionEstimation
RMSN
BaseEKF
LimEKFUKF
Seminar at Portland State University 25

Constantinos Antoniou October 5, 2007
Summary results for estimated and predicted speeds(Wet)
0
0.05
0.1
0.15
0.2
0.25
Three-step PredictionTwo-step PredictionOne-step PredictionEstimation
RMSN
BaseEKF
LimEKFUKF
Seminar at Portland State University 26

Constantinos Antoniou October 5, 2007
On–line calibrated speed–density relationshipsMainline segments – EKF
top: dry weather, bottom: wet weather
10 20 30 40 50 60
70
80
90
10
01
10
12
0
Density (veh/km/lane)
Sp
ee
d (
kp
h)
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!
!!
!
!
!!
!
!
!!
!
!!
!
!
!! !
!
!
!
!!
!!
!
!
!!
!
!
!
!
!
!
!
!
! !
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
! !
!
!
!!
!!
!
!
!
!
!
!
!
!!
!!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
! !
!
! !
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!!
!
!!
!
!
!!
!!
!
!
!
!
!
!
! !
!
!
! !!
!!
!
!
!
!
!
!!!
!
!
!
!
!
!
! !
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!!
!!
!
!!
!
!
!!!
!
!
!
!
! !
!
!
Off!lineOn!line
! Observations
10 20 30 40 50 60
70
80
90
10
01
10
12
0
Density (veh/km/lane)
Sp
ee
d (
kp
h)
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
! !
!
!!
!
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
! ! !
!
!
!
!!!
!
!!
!
!
!
!
!
!
!
!!!
!
!
!
!!
!!
!!
!
!
!
!
!
!
!
!!
!
!
! !
!
!
!
!
!
!!
!
!
!
!
!
! !!
!
!
!
!
!
!
!
!! !
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
! !
!
!
!
!
! !
!
!
!
!
!
!
!!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!!
!
!
!
!
!
!
!
! !
!
!
!!
!
!
! !
!
!
!!!
!!
!
!
!
!
!!
!
!
!
!!
!!
!
!
!!
!
!
Off!lineOn!line
! Observations
Seminar at Portland State University 27

Constantinos Antoniou October 5, 2007
Computational performance (I)
• EKF/UKF
– Similar performance (2n vs. 2n + 1 function evaluations)
• Limiting Kalman Filter
– Order–of–magnitude improvement
– Single function evaluation required (independent of state dimension)
Seminar at Portland State University 28

Constantinos Antoniou October 5, 2007
Computational performance (II)
Function Runtime
evaluations (min:sec)
EKF 2n 98:29
LimEKF 1 0:43
UKF 2n 97:44
• Pentium 4 2.8GHz computer with 512MB RAM
Seminar at Portland State University 29
Constantinos Antoniou October 5, 2007
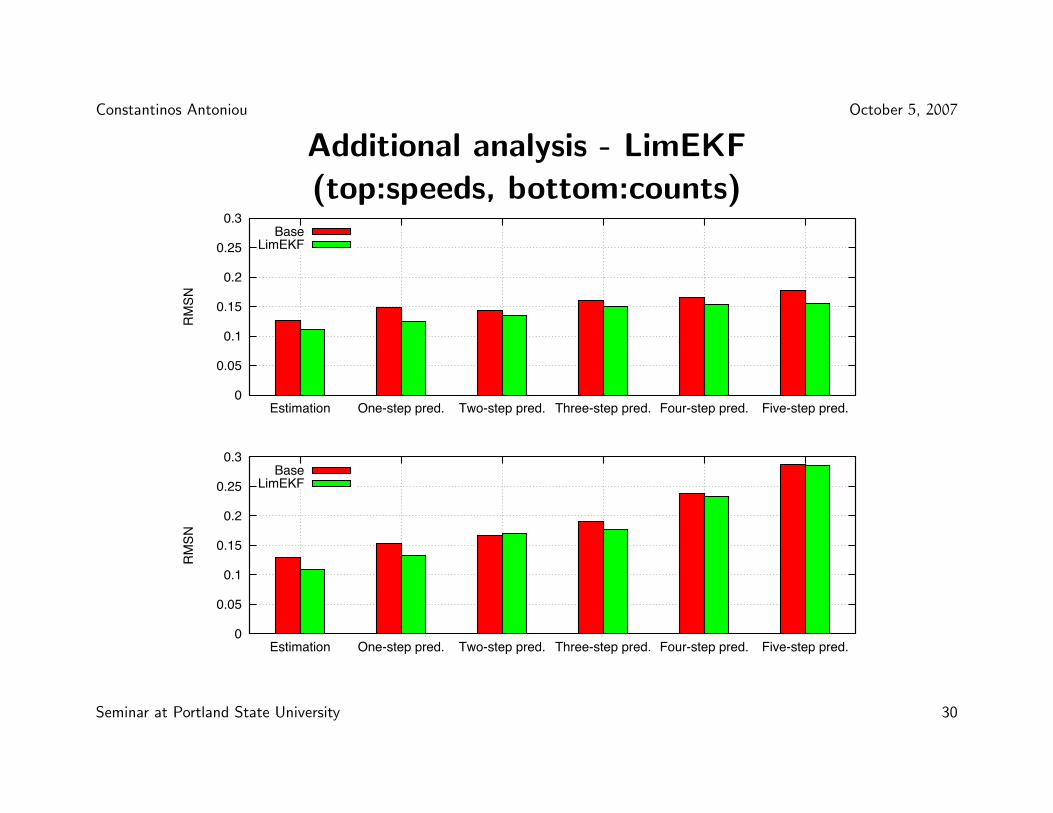
Additional analysis - LimEKF(top:speeds, bottom:counts)
0
0.05
0.1
0.15
0.2
0.25
0.3
Five-step pred.Four-step pred.Three-step pred.Two-step pred.One-step pred.Estimation
RMSN
BaseLimEKF
0
0.05
0.1
0.15
0.2
0.25
0.3
Five-step pred.Four-step pred.Three-step pred.Two-step pred.One-step pred.Estimation
RMSN
BaseLimEKF
Seminar at Portland State University 30

Constantinos Antoniou October 5, 2007
Conclusions/Findings (I)
• Joint on–line calibration of demand and supply parameters can improveprediction accuracy
• Changes in parameters are consistent with tra!c engineering principlesand expectations
• Interactions between many parameters are captured
– Many degrees of freedom
Seminar at Portland State University 31

Constantinos Antoniou October 5, 2007
Conclusions/Findings (II)
• EKF/UKF: “Real-time” performance in a small, but non-trivial realnetwork
• Limiting EKF
– Order(s) of magnitude improvement in computational performance
– Comparable accuracy to EKF/UKF
– Robustness
Seminar at Portland State University 32

Constantinos Antoniou October 5, 2007
Conclusions/Findings (III)
• EKF has more desirable properties than UKF (in this application)
– EKF generally outperforms UKF! Full power of UKF is not exhibited, because transition equation is
already linear
– UKF is not as robust (perhaps due to the number of points used)
– EKF and UKF have similar computational properties
– Limiting EKF (while no similar UKF version exists)
Seminar at Portland State University 33

Constantinos Antoniou October 5, 2007
Directions for further research
• Further experimental analysis
– Scalability– Robustness– Sensitivity
• Impact of grouping segments (for speed–density relationship estimation)
• Algorithms
– e.g. particle filters (generalization of UKF)
Seminar at Portland State University 34

Constantinos Antoniou October 5, 2007
A glimpse at ongoing researchMesoscopic traffic simulation
Density
Calculate speed
Advance vehicles
Data-
base
Density and other
explanatory variables
Calculate speed
Advance vehicles
Typical approach Alternative approach
u=f(k)
Seminar at Portland State University 35

Constantinos Antoniou October 5, 2007
More flexible functional forms
Plus: easily incorporate additional measurements
Seminar at Portland State University 36

Constantinos Antoniou October 5, 2007
A comparison of data–driven approaches (I)
• Locally weighted regression
• Support vector regression
• Neural networks
Seminar at Portland State University 37

Constantinos Antoniou October 5, 2007
A comparison of data–driven approaches (II)
Seminar at Portland State University 38

Constantinos Antoniou October 5, 2007
A comparison of data–driven approaches (III)
Notes: Application runtimes. SVR is an order of magnitude slower.
Seminar at Portland State University 39

Constantinos Antoniou October 5, 2007
An integrated machine learning approach
k-means,
Fuzzy c-means, etc
Flexible
relationships f(x)
K-nearest
neighbors
Clustering
Fitting
Classification
Flexible
relationships f(x)Estimation
Training data
(Speeds/Densities/flows)
Estimated
speeds
Training
Explanatory data
(Densities/flows)
Application
Seminar at Portland State University 40

Constantinos Antoniou October 5, 2007
An integrated approach: loess and clustering (I)
!!
!
!
!
!
!!
!
!
!
!!
!
!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!!
!!
!!
!!
!
!!
!!
!
!
!
!!
!
!
!
!
!
!
!
!!
!
!!
!!
!
!!!
!
!
!
!
!
!
!!
!
!!
!
!!!
!
!
!
!!!
!
!
!
!!
!!
!
!
!!
!!
!
!
!!!!
Classic
loess
(dsy)
loess
(dsy+flw)
loess!clust
(dsy)
loess!clust
(dsy+flw)
!40
!20
020
40
B. Distribution of speed deviations by approach
Approach
Devia
tions in s
peeds (
kph)
Seminar at Portland State University 41

Constantinos Antoniou October 5, 2007
An integrated approach: loess and clustering (II)
!!!!! !!!! !! !!!!! ! !! !! !!! ! !!! !!!!!! !! ! !! !! !! !!!! !! !!! !!! ! !!!! ! ! !! ! ! !!!! !!!!! !!!! ! !!!! ! !! !! !! ! ! !!! ! !!! !! !! ! !!!! !!! !! !!!!!! !! ! !!! !!! !!! !!! !!!!! !!! !! !!!!!! ! !!!!! ! ! !!! ! !! ! !! !!!!! ! !! !! !! !!! !! ! !!!!! !!! ! ! !! !!!! !!! !! !! ! ! !! ! ! !!!! !! !!!!!!! !! !! !! ! !!!!! !!!!!!! !!! !!!!!! !! ! ! !!! !!! !! !! ! !!!! ! !!! !!!
!
!! !! !!! !! !!! !!!! !!!! !! ! !!!!
!!! !!!!!!! !!! !!! !!
!!
!
!! !!
!
!!
!
!!!
!!!
! !!
!!!! !!! !
!!!
!
!!!
!
!!!
!! !
!
!!!! !!! !!!!!
!
!!
!
!
!!!
!
! !
!
! !
!
!!!!
!
!!
!
!!
!
!!!!!
!!
!
!! !!
!!
!!
!
!!
!
!!
!
!!
!
!!
!
!!!!
!
!! !!
!!
!
!!!!
!
!!
!
!!
!
!
!
!
!
!!
!
!
!
!
!!
!!!
!
!
!
!
!
!
!!!
! !
!
!
!!
!
!
!
!
!
!
!
!!
! !!
!
!
!!!!
!
!!!
!!!
!!
!!
!!!
!!
!
!!!
!!!
!!
!
!
!
!
!
!!! !
!!
!! !
!!!
!!
!
!
!
!
!!
!!
!!!
! !! !
!! !
!! !!
!!!
!
!!
!
!
!!
!!
!
!!!
!
!
!!
!
!
!!
!!
!
!!!!!
!
!!!!
!!
!!
! !!! !!!
!!
!
!!!!! !! !!! !! !! !!! ! !!!! !! !!!!! !!! !!! !!!!! !!!!!! !! !!!!!
!!! !!! !! !!!! !! !!!! ! !!! ! !!!! !! !!!!!!!!! !! !
0 50 100 150
050
100
150
A. Classic speed!density relationship
Observed speeds(kph)
Estim
ate
d s
peeds (
kph)
!!!!! !!!! !! !!!!! ! !! !! !!! ! !!! !!!!!! !! ! !! !! !! !!!! !! !!! !!! ! !!!! ! ! !! ! ! !!!! !!!!! !!!! ! !!!! ! !! !! !! ! ! !!! ! !!! !! !! ! !!!! !!! !! !!!!!! !! ! !!! !!! !!! !!! !!!!! !!! !! !!!!!! ! !!!!! ! ! !!! ! !! ! !! !!!!! ! !! !! !! !!! !! ! !!!!!
!!! ! ! !! !!!! !!!!! !! ! ! !! ! ! !!!! !! !
!!!!!! !! !! !
!!
!!!!! !!!!
!!
! !!! !!!!!!
!! ! ! !!! !!! !! !
! !!!
!! ! !!! !!
!
!
!! !!
!!!
!! !!! !!!! !!!! !! ! !!!
!!!
! !!!
!!!!!!
!!!
! !!!
!
!
!! !!
!!!!
!!!
!!!
! !!
!!!
!!!!
!!!!
!
!!!
!!!
!!! !
!
!!!! !!! !!!!!
!
!!
!!
!!
!
!
! !
!! !
!
!!!!
!
!!!
!!!
!!!!!
!!
!
!! !
!!!
!!
!
!!
!
!!
!
!
!!
!!
!
!!!!
!
!! !!
!!
!
!!!!
!
!!
!
!!
!
!
!
! !
!! !
!
!
!
!
!
!!!
!
!
!
!
!
!
!!!
! !
!
!
!!
!
!
!
!
!
!
!!
!
! !!
!
!
!!!!
!
!!!
!!!
!!
!!
!
!!
!!
!
!!!
!
!!!!
!
!
!
!
!
!!! !
!!
!! ! !!!
!!!
!
!
!
!!
!
!
!!!
! !! !
!! !
!! !!
!!!
!
!!
!
!!
!
!!
!
!!!
!
!
!!
!
!
!!
!!
!! !!!!
!
!! !!!
!
!!
! !!
! !!!
!!
!
!!!!! !!
!!
!!! !! !!! ! !!
!! !! !!!
!! !!
! !!!
!!!!! !!!!!
!!! !
!!!!
!!!!
!! !! !!!!
!! !!
!! ! !!! ! !!!! !! !!!!!!!!! !! !
0 50 100 150
050
100
150
B. Loess (density)
Observed speeds (kph)
Estim
ate
d s
peeds (
kph)
!!!!
!
!!
!!
!
!
!!
!!
!!
!!
!!!
!!
!!
!!
!
!!!
!! !! !
!
! !
! !
!!
!!
!
!
!
!!!
!!!
!
!
!
!
!!
! !
!
!
!!!
!
!
!
!!
!!
!
!!
!
! !!
!!
!!!
!
!
!
! !
!!
!
!
!
!
!!
!
!
!! ! !!
!
! !
!
!
!
!
!!!
!!
!
!
!
!!
!!
!!!
!!
!
!!
!
!!!!! !
!
!
!!
!!
!!!
!
!
!!
!
!
!
!
! !!
!
!
!
!
! !!
!
!!!
!!
!
!
!
!
!!
!
!
!
!
!!
!!!
!!
!!
!
!!
!!
!
!
!!
!
!! !
!
!!
! !
!
!
!
!!!
!
!
!
!!!!
!!
!
!
!
!
!
!
!
!
!!!
!!
!
!
!!! !!!
!
!!
!!!
!
!!
!
!!
! !
!!
!!!
!
! !
!
!!
!
!!!
!!!
!!!
!
!
!
!!
!!! !!
!!
!!
!!
!
!!!! !
!
! !!!
! !!
!
!!!
!!!!
!!
! !!
!
!
!!
!
!
!!!
!!
!!!
!!!!!!!
!
!!! !
!!!
!!
!!!!!!!
!
!!
!!
! !!
!!
!!!!!
!!!!
!
!
! !!!!
!
!!! !
!!
!!!!!!
!!!!
!!
!!!
!!!
!
!!!!!
! !!
!
!
!
!
!!
!
!
!!
!
!!
!! !!!!!!
!!!
!!!!!
!!!!!
!!
!!
!
!
!
!
!! !!
!
!
!!!!!!
!
!! !
!
!
!!!
!!!! !
!!
!
!
!
!!
!
!
!
!!!
!
!!!!!!
!!!!!
!
!!!
!!!
!!
!
!!!
!
!!!!
!
!!
!
!
!!
! !!!
!!
!
!!
!!!!
!!
!!!!
!!
!!
!
!!!
!!
!!! !!!!!
!
!!
!!
!!!
!
!
!!!
!
!!!
!
!
!!
!
!!
!
!!!
! !
!! !!
!
!!!
!!
!!
!
!
! !!!
!!!!!
!!
!
!
!
!
! !!
!
!
!
!!!
!! !
!!!!!
! !!
!!!
! !!
!
!!!
!!!!!!! !
!
!!!
!!!
!!!
!! !!!
!
!
!
!!!
!
!!
!! !!
!!!
!
!
!!!
!
!!
!!! !
!
!
0 50 100 150
050
100
150
C. Loess (density+flow)
Observed speeds (kph)
Estim
ate
d s
peeds (
kph)
!!!!
!!
!!!
!
!
!!!!!
! !!!
!!
!
!
!
!!
! !!
!!
!! !!!
!
!!
! !! !!!
!
!
!!!!
!!! !
!
!
!
!!
!!!
!
!!!
!!
!
!
!
!!
!
!!
!
!
!!
!
!
! !!
!
!!
!
!
! !
!!!
!!!
!
!
!!!
!!
!
! !
!!
!!
!!
!
!
!
!
!
!
! !!! !!
!
!!
!
!!
!
!!
!
!
!!!
!
!!!
!
!!!
!
! !!!
!
!
! ! !!!
!
!!
! !! !!!!
! !
!
!
!
!
!
!
!!
!
!
! !!!!!!
!!
!
! ! !
!
!!
!!
!!!
!! !!
!!
!!
! ! !!!!
!
! !!!!!!
!
!
!!
! !
!
!!!
!!!
!!
!!!!
!
!
!!
!!!!
!!
!
!
!
! !
!!
!!!
!
! !
!
!!!
!!
! !!!
!!!
!
!
!!! !!
!!!!!
!
!!!
!!!!
! !!
! !!!
! !!
!!!
!
!!
!!
!
!
!!
!
!!
!!!
!!!
!!! !!!
!!!!!!! !
!!! !
! !!
!!
!!!!
!!!!
!!
!!
!!
!!
!!!!!!
!!!!!
!
!!
!!
!!!!
! !
!! !!
!!!
!
!!!!!!
!
!
!!!
!
!
!!!
!!
!!!
!!
!
!
!
!
!
!!
!
!
!!
!!
!!!!
!!!
!!
!! !
!!
!!
!!!
!
!!!
!
!
! !
!! !!
!
!!!
!!!!
!
!
!
!
!
!
!!! !
!!! !
!!
!
!
!
!
!
!!
!
!!!
!
!!!
!
!
!
!!!!!
!
!!!
!!
!!!
!!!
!!
!!!!
!
!!
!
!
!!! !
!!
!! !
!!
!!!!
!!!
!!!
!!
!!
!!! !
!!
!!! !!!!
!!
!!!
!!!!
!
!
!!!
!
!
!!
!
! !!
!
!!
! !!!
!
!
!! !!
!!!!
!!
!!
!
!
!
!!
!!!!!
!
!
!!
!
!
!
!!
!
!!
!
! !!!!!
! !!!!! !
!!!!!!!
!!!
!!
!
!!
!!!!
!
!!!
!!! !
!!
!! !!!
!!
!!
!!
!
!
!!! !
!
!
!!
!
!
!!!!!
!!!
! !
!!
0 50 100 150
050
100
150
D. Clustered Loess (density)
Observed speeds (kph)
Estim
ate
d s
peeds (
kph)
!!!!
!
!!
!! !
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!!!!
!!
!
!
!!
!
!
!
!
!!
!
!
!
!!!
!!
!
!!
!
!
! !
!!
!!
! !!
!!
!!!
!!
!!!
!
! !!
!
!
!!!
!
!
!
!!
!
!!
!
!
!
!!
!
!
!! !!
!
!
!
!
!!
!
!
!!!!!
!
!
!
! !
!
!!
!
!
!!
!
!!
!!!
!!! !!
!
!!!
!!
!!
!
!
!!
!
!
!
!! !!
!
!
!
!
! !!
!
!!!
! !
!
!
!
!
!!
!
!
!
!
!! !!
!
!!
!!
!
! ! !!
!!
!!
!
!!
!
!!!
!! !
!
!
!!
!!
!!
! !!!!!!
!
!
!!
! !
!
! !!!!!
!!!! !!!
!
!!
!!!
!!!
!
!
!
! !
!!
!!
!
!
! !
!
!!!
!!! !
!!!!!
!
!
!
!
!
!!! !!
!!
!
!
!!!
!!!! !
!
! !!!
! !!
!
!!!
!!!!
!!
! !!
!!
!!!
!
!!!
!!
!!
!
!!!!!!
! !
!!! !
!!!
!!
!!!!!!!
!
!!
!!
! !!
!!
!!!!! !
!!!!
!
! !!!!
!
!!
! !
!!
!!!!!!
!!!!
!!
!
!!!!
!
!
!!!!!
! !!
!
!
!
!
!
!
!
!
!!
!!!
!!!!
!!
!!!!!
!! !!!
!!!!!
!!
!!
!
!
!
!
!! !
!
!!
!!
!!!!
!
!
!
!
!
!
!!!
!
!!! !
!!!
!
!
!
!!
!
!
!!!
!
!!!!
!!!!!!!
!
!!!
!!!
!!
!!!!!
!!!!
!
!!
!
!
!!! !!
!
!!
!!!
!!!!
!!!
!!!
!!
!!
!
!!!
!!
! !! !!!!!
!
!!
!!
!!!
!
!
!!!
!
!
!
!
!
!
!!
!!!
!!
!!
! !
!! !!
!
!!!
! !!
!
!
!
! !!
!
!!!!!!!
!
!
!
!
!!
!
!!
!!
!!
!!!
!!!!!
! !!!
!!! !!
!
!!!
!!!!
!
!!
!!
!!!!!
! !
!!
!! !!!
!
!!
!!!
!
!
!
!! !
!!!! !
!
!!!
!
!
!!!! !
!!
0 50 100 150
050
100
150
E. Clustered Loess (density+flow)
Observed speeds (kph)
Estim
ate
d s
peeds (
kph)
!!!!! !!!! !! !!!!! ! !! !! !!! ! !!! !!!!!! !! ! !! !! !! !!!! !! !!! !!! ! !!!! ! ! !! ! ! !!!! !!!!! !!!! ! !!!! ! !! !! !! ! ! !!! ! !!! !! !! ! !!!! !!! !! !!!!!! !! ! !!! !!! !!! !!! !!!!! !!! !! !!!!!! ! !!!!! ! ! !!! ! !! ! !! !!!!! ! !! !! !! !!! !! ! !!!!! !!! ! ! !! !!!! !!! !! !! ! ! !! ! ! !!!! !! !!!!!!! !! !! !! ! !!!!! !!!!!!! !!! !!!!!! !! ! ! !!! !!! !! !! ! !!!! ! !!! !!!
!
!! !! !!! !! !!! !!!! !!!! !! ! !!!!
!!! !!!!!!! !!! !!! !!
!!
!
!! !!
!
!!
!
!!!
!!!
! !!
!!!! !!! !
!!!
!
!!!
!
!!!
!! !
!
!!!! !!! !!!!!
!
!!
!
!
!!!
!
! !
!
! !
!
!!!!
!
!!
!
!!
!
!!!!!
!!
!
!! !!
!!
!!
!
!!
!
!!
!
!!
!
!!
!
!!!!
!
!! !!
!!
!
!!!!
!
!!
!
!!
!
!
!
!
!
!!
!
!
!
!
!!
!!!
!
!
!
!
!
!
!!!
! !
!
!
!!
!
!
!
!
!
!
!
!!
! !!
!
!
!!!!
!
!!!
!!!
!!
!!
!!!
!!
!
!!!
!!!
!!
!
!
!
!
!
!!! !
!!
!! !
!!!
!!
!
!
!
!
!!
!!
!!!
! !! !
!! !
!! !!
!!!
!
!!
!
!
!!
!!
!
!!!
!
!
!!
!
!
!!
!!
!
!!!!!
!
!!!!
!!
!!
! !!! !!!
!!
!
!!!!! !! !!! !! !! !!! ! !!!! !! !!!!! !!! !!! !!!!! !!!!!! !! !!!!!
!!! !!! !! !!!! !! !!!! ! !!! ! !!!! !! !!!!!!!!! !! !
0 50 100 150
050
100
150
A. Classic speed!density relationship
Observed speeds(kph)
Estim
ate
d s
peeds (
kph)
!!!!! !!!! !! !!!!! ! !! !! !!! ! !!! !!!!!! !! ! !! !! !! !!!! !! !!! !!! ! !!!! ! ! !! ! ! !!!! !!!!! !!!! ! !!!! ! !! !! !! ! ! !!! ! !!! !! !! ! !!!! !!! !! !!!!!! !! ! !!! !!! !!! !!! !!!!! !!! !! !!!!!! ! !!!!! ! ! !!! ! !! ! !! !!!!! ! !! !! !! !!! !! ! !!!!!
!!! ! ! !! !!!! !!!!! !! ! ! !! ! ! !!!! !! !
!!!!!! !! !! !
!!
!!!!! !!!!
!!
! !!! !!!!!!
!! ! ! !!! !!! !! !
! !!!
!! ! !!! !!
!
!
!! !!
!!!
!! !!! !!!! !!!! !! ! !!!
!!!
! !!!
!!!!!!
!!!
! !!!
!
!
!! !!
!!!!
!!!
!!!
! !!
!!!
!!!!
!!!!
!
!!!
!!!
!!! !
!
!!!! !!! !!!!!
!
!!
!!
!!
!
!
! !
!! !
!
!!!!
!
!!!
!!!
!!!!!
!!
!
!! !
!!!
!!
!
!!
!
!!
!
!
!!
!!
!
!!!!
!
!! !!
!!
!
!!!!
!
!!
!
!!
!
!
!
! !
!! !
!
!
!
!
!
!!!
!
!
!
!
!
!
!!!
! !
!
!
!!
!
!
!
!
!
!
!!
!
! !!
!
!
!!!!
!
!!!
!!!
!!
!!
!
!!
!!
!
!!!
!
!!!!
!
!
!
!
!
!!! !
!!
!! ! !!!
!!!
!
!
!
!!
!
!
!!!
! !! !
!! !
!! !!
!!!
!
!!
!
!!
!
!!
!
!!!
!
!
!!
!
!
!!
!!
!! !!!!
!
!! !!!
!
!!
! !!
! !!!
!!
!
!!!!! !!
!!
!!! !! !!! ! !!
!! !! !!!
!! !!
! !!!
!!!!! !!!!!
!!! !
!!!!
!!!!
!! !! !!!!
!! !!
!! ! !!! ! !!!! !! !!!!!!!!! !! !
0 50 100 150
050
100
150
B. Loess (density)
Observed speeds (kph)
Estim
ate
d s
peeds (
kph)
!!!!
!
!!
!!
!
!
!!
!!
!!
!!
!!!
!!
!!
!!
!
!!!
!! !! !
!
! !
! !
!!
!!
!
!
!
!!!
!!!
!
!
!
!
!!
! !
!
!
!!!
!
!
!
!!
!!
!
!!
!
! !!
!!
!!!
!
!
!
! !
!!
!
!
!
!
!!
!
!
!! ! !!
!
! !
!
!
!
!
!!!
!!
!
!
!
!!
!!
!!!
!!
!
!!
!
!!!!! !
!
!
!!
!!
!!!
!
!
!!
!
!
!
!
! !!
!
!
!
!
! !!
!
!!!
!!
!
!
!
!
!!
!
!
!
!
!!
!!!
!!
!!
!
!!
!!
!
!
!!
!
!! !
!
!!
! !
!
!
!
!!!
!
!
!
!!!!
!!
!
!
!
!
!
!
!
!
!!!
!!
!
!
!!! !!!
!
!!
!!!
!
!!
!
!!
! !
!!
!!!
!
! !
!
!!
!
!!!
!!!
!!!
!
!
!
!!
!!! !!
!!
!!
!!
!
!!!! !
!
! !!!
! !!
!
!!!
!!!!
!!
! !!
!
!
!!
!
!
!!!
!!
!!!
!!!!!!!
!
!!! !
!!!
!!
!!!!!!!
!
!!
!!
! !!
!!
!!!!!
!!!!
!
!
! !!!!
!
!!! !
!!
!!!!!!
!!!!
!!
!!!
!!!
!
!!!!!
! !!
!
!
!
!
!!
!
!
!!
!
!!
!! !!!!!!
!!!
!!!!!
!!!!!
!!
!!
!
!
!
!
!! !!
!
!
!!!!!!
!
!! !
!
!
!!!
!!!! !
!!
!
!
!
!!
!
!
!
!!!
!
!!!!!!
!!!!!
!
!!!
!!!
!!
!
!!!
!
!!!!
!
!!
!
!
!!
! !!!
!!
!
!!
!!!!
!!
!!!!
!!
!!
!
!!!
!!
!!! !!!!!
!
!!
!!
!!!
!
!
!!!
!
!!!
!
!
!!
!
!!
!
!!!
! !
!! !!
!
!!!
!!
!!
!
!
! !!!
!!!!!
!!
!
!
!
!
! !!
!
!
!
!!!
!! !
!!!!!
! !!
!!!
! !!
!
!!!
!!!!!!! !
!
!!!
!!!
!!!
!! !!!
!
!
!
!!!
!
!!
!! !!
!!!
!
!
!!!
!
!!
!!! !
!
!
0 50 100 150
050
100
150
C. Loess (density+flow)
Observed speeds (kph)
Estim
ate
d s
peeds (
kph)
!!!!
!!
!!!
!
!
!!!!!
! !!!
!!
!
!
!
!!
! !!
!!
!! !!!
!
!!
! !! !!!
!
!
!!!!
!!! !
!
!
!
!!
!!!
!
!!!
!!
!
!
!
!!
!
!!
!
!
!!
!
!
! !!
!
!!
!
!
! !
!!!
!!!
!
!
!!!
!!
!
! !
!!
!!
!!
!
!
!
!
!
!
! !!! !!
!
!!
!
!!
!
!!
!
!
!!!
!
!!!
!
!!!
!
! !!!
!
!
! ! !!!
!
!!
! !! !!!!
! !
!
!
!
!
!
!
!!
!
!
! !!!!!!
!!
!
! ! !
!
!!
!!
!!!
!! !!
!!
!!
! ! !!!!
!
! !!!!!!
!
!
!!
! !
!
!!!
!!!
!!
!!!!
!
!
!!
!!!!
!!
!
!
!
! !
!!
!!!
!
! !
!
!!!
!!
! !!!
!!!
!
!
!!! !!
!!!!!
!
!!!
!!!!
! !!
! !!!
! !!
!!!
!
!!
!!
!
!
!!
!
!!
!!!
!!!
!!! !!!
!!!!!!! !
!!! !
! !!
!!
!!!!
!!!!
!!
!!
!!
!!
!!!!!!
!!!!!
!
!!
!!
!!!!
! !
!! !!
!!!
!
!!!!!!
!
!
!!!
!
!
!!!
!!
!!!
!!
!
!
!
!
!
!!
!
!
!!
!!
!!!!
!!!
!!
!! !
!!
!!
!!!
!
!!!
!
!
! !
!! !!
!
!!!
!!!!
!
!
!
!
!
!
!!! !
!!! !
!!
!
!
!
!
!
!!
!
!!!
!
!!!
!
!
!
!!!!!
!
!!!
!!
!!!
!!!
!!
!!!!
!
!!
!
!
!!! !
!!
!! !
!!
!!!!
!!!
!!!
!!
!!
!!! !
!!
!!! !!!!
!!
!!!
!!!!
!
!
!!!
!
!
!!
!
! !!
!
!!
! !!!
!
!
!! !!
!!!!
!!
!!
!
!
!
!!
!!!!!
!
!
!!
!
!
!
!!
!
!!
!
! !!!!!
! !!!!! !
!!!!!!!
!!!
!!
!
!!
!!!!
!
!!!
!!! !
!!
!! !!!
!!
!!
!!
!
!
!!! !
!
!
!!
!
!
!!!!!
!!!
! !
!!
0 50 100 150
050
100
150
D. Clustered Loess (density)
Observed speeds (kph)
Estim
ate
d s
peeds (
kph)
!!!!
!
!!
!! !
!
!!
!
!
!
!
!
!
!!
!
!
!
!
!
!
!
!
!!!!!
!!
!
!
!!
!
!
!
!
!!
!
!
!
!!!
!!
!
!!
!
!
! !
!!
!!
! !!
!!
!!!
!!
!!!
!
! !!
!
!
!!!
!
!
!
!!
!
!!
!
!
!
!!
!
!
!! !!
!
!
!
!
!!
!
!
!!!!!
!
!
!
! !
!
!!
!
!
!!
!
!!
!!!
!!! !!
!
!!!
!!
!!
!
!
!!
!
!
!
!! !!
!
!
!
!
! !!
!
!!!
! !
!
!
!
!
!!
!
!
!
!
!! !!
!
!!
!!
!
! ! !!
!!
!!
!
!!
!
!!!
!! !
!
!
!!
!!
!!
! !!!!!!
!
!
!!
! !
!
! !!!!!
!!!! !!!
!
!!
!!!
!!!
!
!
!
! !
!!
!!
!
!
! !
!
!!!
!!! !
!!!!!
!
!
!
!
!
!!! !!
!!
!
!
!!!
!!!! !
!
! !!!
! !!
!
!!!
!!!!
!!
! !!
!!
!!!
!
!!!
!!
!!
!
!!!!!!
! !
!!! !
!!!
!!
!!!!!!!
!
!!
!!
! !!
!!
!!!!! !
!!!!
!
! !!!!
!
!!
! !
!!
!!!!!!
!!!!
!!
!
!!!!
!
!
!!!!!
! !!
!
!
!
!
!
!
!
!
!!
!!!
!!!!
!!
!!!!!
!! !!!
!!!!!
!!
!!
!
!
!
!
!! !
!
!!
!!
!!!!
!
!
!
!
!
!
!!!
!
!!! !
!!!
!
!
!
!!
!
!
!!!
!
!!!!
!!!!!!!
!
!!!
!!!
!!
!!!!!
!!!!
!
!!
!
!
!!! !!
!
!!
!!!
!!!!
!!!
!!!
!!
!!
!
!!!
!!
! !! !!!!!
!
!!
!!
!!!
!
!
!!!
!
!
!
!
!
!
!!
!!!
!!
!!
! !
!! !!
!
!!!
! !!
!
!
!
! !!
!
!!!!!!!
!
!
!
!
!!
!
!!
!!
!!
!!!
!!!!!
! !!!
!!! !!
!
!!!
!!!!
!
!!
!!
!!!!!
! !
!!
!! !!!
!
!!
!!!
!
!
!
!! !
!!!! !
!
!!!
!
!
!!!! !
!!
0 50 100 150
050
100
150
E. Clustered Loess (density+flow)
Observed speeds (kph)
Estim
ate
d s
peeds (
kph)
Reduction in RMSN:
Loess (density): -7%, Loess (density+flow): -35%
Loess/clust (density): -41%, Loess/clust (density+flow): -47%
Seminar at Portland State University 42
Constantinos Antoniou October 5, 2007
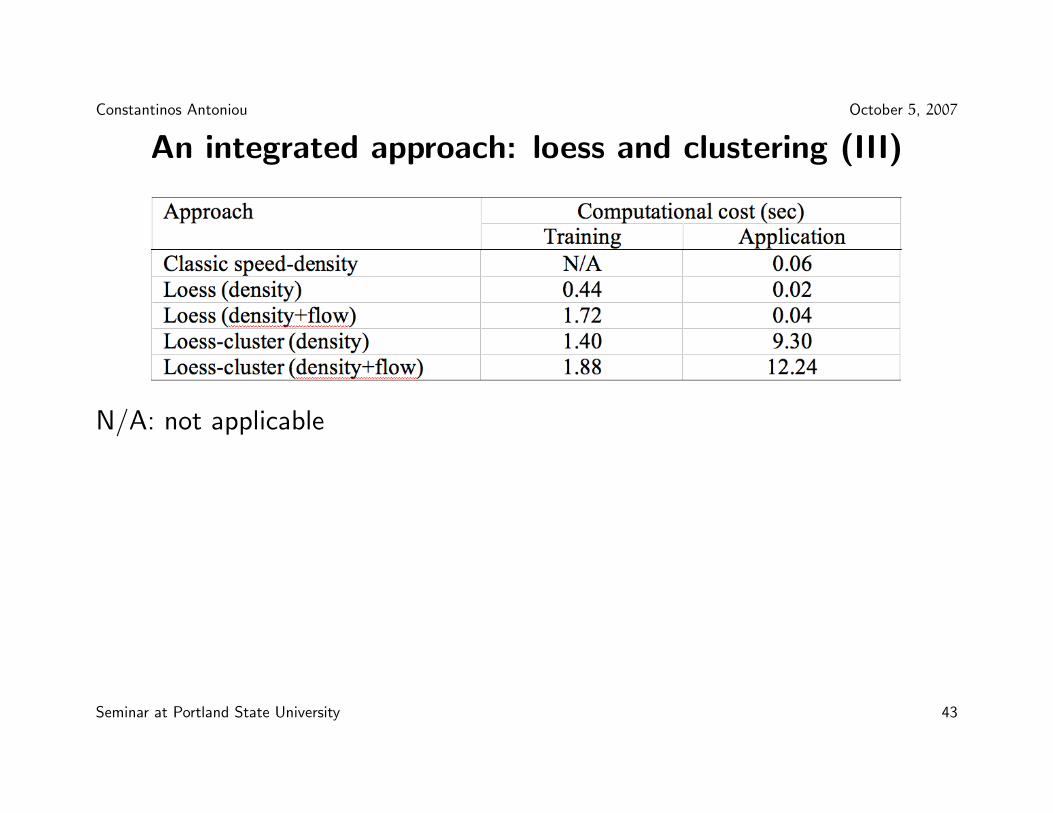
An integrated approach: loess and clustering (III)
N/A: not applicable
Seminar at Portland State University 43
Constantinos Antoniou October 5, 2007
Thank you
Questions?
Contact information:
Constantinos Antoniou ([email protected])
Seminar at Portland State University 44


















